Область техники, к которой относится изобретение
Изобретение относится к нефтедобывающему оборудованию, а именно к станциям управления двигателями электроцентробежных насосов, и может быть использована для добычи пластовой жидкости с помощью насосов.
Уровень техники
Известна система управления бездатчиковым двигателем (см. В.Н.Вае, et al., "Implementation of sensorless vector control for super-high-speed PMSM of turbo-compressor" IEEE Trans, on Industry Applications, Vol.39, No.3, p.811-818, 2003), включающая в себя микропроцессорный вычислитель, преобразователь частоты и датчик тока. Недостатком данной системы управления является отсутствие автоматического задание частоты вращение в зависимости от режима работы насоса и невозможность управления двигателем через кабель требуемой длины (для погружных электроцентробежных насосов - 2500…3500 м). Кроме того, данная система не позволяет управлять асинхронным двигателем.
Наиболее близким аналогом к предложенному изобретению является электронасосная погружная установка (см. RU 2303715 С1, 27.07.2007) с универсальной станцией управления. Станция управления включает в себя контроллер, микропроцессорный вычислитель, преобразователь частоты и блок датчиков тока. Преобразователь частоты состоит из последовательно соединенных выпрямителя, фильтра звена постоянного тока и инвертора с формирователем сигналов управления ключами. В состав данной станции управления входит контроллер, который обеспечивает задание частоты вращения насоса в зависимости от режима эксплуатации. Структура микропроцессорного вычислителя позволяет управлять двигателем через кабель большой длины.
Однако в указанном прототипе, так же как и в первом аналоге, имеется недостаток, связанный с невозможностью управления асинхронным двигателем. Кроме того, выходное напряжения станции управления имеет прямоугольную форму, что увеличивает потери в двигателе, вызывает пульсации вращающего момента на валу двигателя и приводит к возникновению перенапряжений в цепи «станция управления - повышающий трансформатор - погружной кабель-электродвигатель». Дополнительные потери в электродвигателе вызывают повышенный нагрев, что снижает ресурс изоляции и в конечном итоге приводит к ее выходу из строя. Пульсации момента на валу электродвигателя приводят к повышению вибрации и снижению ресурса двигателя и погружного насоса в целом. Перенапряжения в цепи «станция управления - повышающий трансформатор - погружной кабель - электродвигатель» могут привести к пробою изоляции трансформатора, кабеля или электродвигателя.
Раскрытие изобретения
Задача и технический результат изобретения состоят в возможности управления от одной станции управления как вентильным, так и асинхронным погружным двигателем, а также в увеличении ресурса оборудования за счет того, что выходное напряжение станции управления имеет синусоидальную форму, что исключает перенапряжения в электрической цепи при работе и снижает пульсации момента на валу электродвигателя. Кроме того, такая форма напряжения обеспечивает экономию электроэнергии за счет отсутствия дополнительных потерь от высших гармоник.
Указанный технический результат достигается тем, что универсальная станция управления погружным электронасосом, содержащая микропроцессорный вычислитель, преобразователь частоты, состоящий из последовательно соединенных выпрямителя, фильтра звена постоянного тока, инвертора и формирователя сигналов управления ключами, входы которого подключены к выходу микропроцессорного вычислителя, первый блок датчиков тока и контроллер, выход которого подключен к входу задания частоты микропроцессорного вычислителя, причем вход выпрямителя подключен к силовому входу станции управления, согласно изобретению дополнительно содержит выходной фильтр и второй блок датчиков тока, причем выход инвертора подключен через первый блок датчиков тока к входу выходного фильтра, выход которого через второй блок датчиков тока подключен к выходу станции управления, а информационный выход первого блока датчиков тока подключен к первому информационному входу микропроцессорного вычислителя, причем информационный выход второго блока датчиков тока подключен ко второму информационному входу микропроцессорного вычислителя.
Кроме того, в универсальной станции управления преобразователь частоты может содержать датчик напряжения, а микропроцессорный вычислитель может включать три сумматора, регулятор скорости, блок задания тока, два регулятора тока статора, преобразователь координат, блок вычисления скважности, формирователь широтно-импульсной модуляции, два преобразователя тока и блок вычисления, причем прямой вход первого сумматора подключен к входу задания частоты микропроцессорного вычислителя, а выход первого сумматора подключен к входу регулятора скорости, выход которого подключен к прямому входу второго сумматора, выход которого подключен к первому входу первого регулятора тока статора, выход которого подключен к первому входу преобразователя координат, первый выход которого подключен к первому входу блока вычисления скважности и первому входу блока вычисления, а второй выход преобразователя координат подключен ко второму входу блока вычисления скважности и второму входу блока вычисления, причем третий вход блока вычисления скважности подключен к информационному выходу датчика напряжения, вход которого подключен к выходу входного фильтра, а выходы блока вычисления скважности подключены к формирователю широтно-импульсной модуляции, при этом выход блока задания тока подключен к прямому входу третьего сумматора, а выход третьего сумматора подключен к первому входу второго регулятора тока статора, выход которого подключен ко второму входу преобразователя координат, причем вход первого преобразователя тока подключен к первому информационному входу микропроцессорного вычислителя, а первый выход первого преобразователя тока подключен к третьему входу блока вычисления и ко второму входу первого регулятора тока статора, а второй выход первого преобразователя тока подключен к четвертому входу блока вычисления и ко второму входу второго регулятора тока статора, причем вход второго преобразователя тока подключен ко второму информационному входу микропроцессорного вычислителя, а первый выход второго преобразователя тока подключен к пятому входу блока вычисления и к инверсному входу второго сумматора, а второй выход второго преобразователя тока подключен к шестому входу блока вычисления и к инверсному входу третьего сумматора, причем первый выход блока вычисления подключен к третьему входу преобразователя координат, а второй выход блока вычисления подключен к инверсному входу.
Краткое описание чертежей
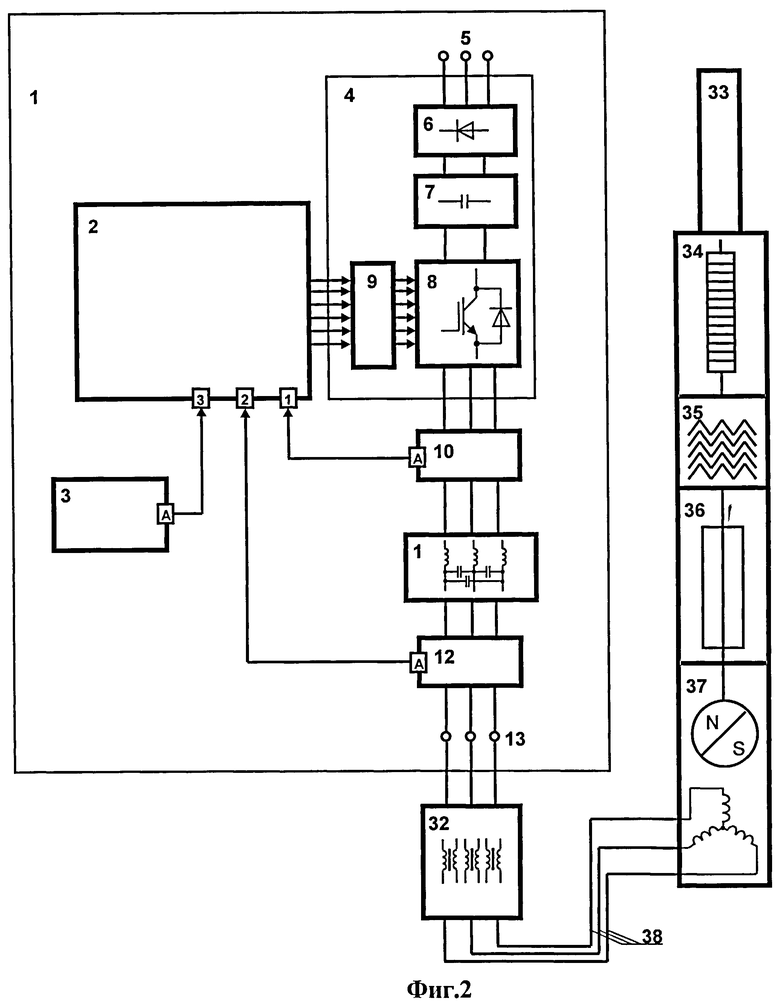
На фиг.1 показана структурная схема универсальной станции управления.
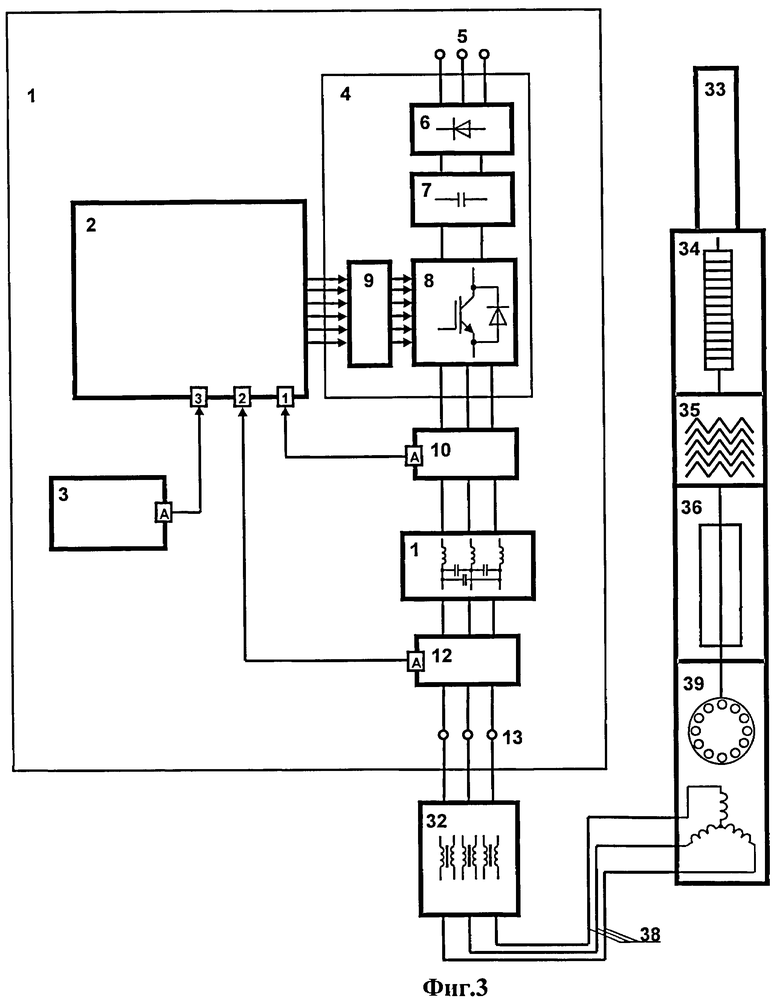
На фиг.2 показан пример использования универсальной станции управления с электронасосной погружной установкой в комплекте с вентильным погружным электродвигателем.
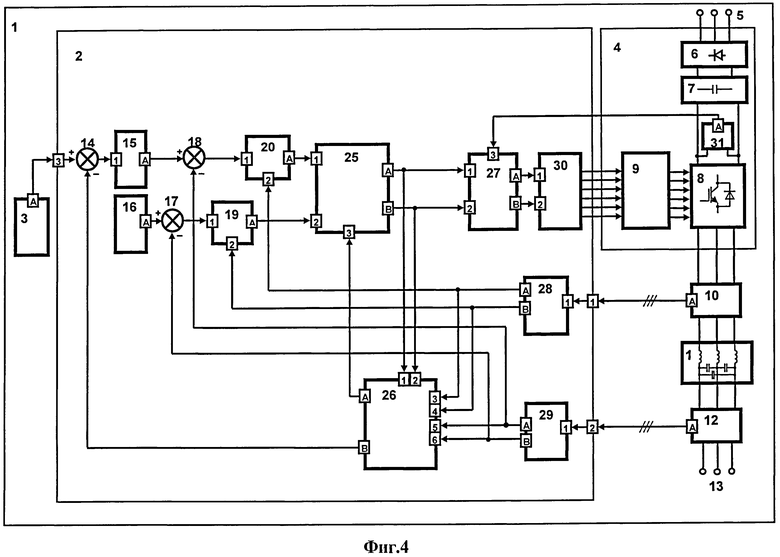
На фиг.3 показан пример использования универсальной станции управления с электронасосной погружной установкой в комплекте с асинхронным погружным электродвигателем.
На фиг.4 показана структурная схема универсальной станции управления с дополнительным датчиком напряжения в преобразователе частоты и структурной схемой микропроцессорного вычислителя.
Осуществление изобретения
Универсальная станция 1 управления (см. фиг.1) погружным электронасосом содержит микропроцессорный вычислитель 2, преобразователь 4 частоты, состоящий из последовательно соединенных выпрямителя 6, фильтра 7 звена постоянного тока, инвертора 8 и формирователя 9 сигналов управления ключами, входы которого подключены к выходу микропроцессорного вычислителя 2, первый блок 10 датчиков тока и контроллер 3. Выход А контроллера 3 (на всех фигурах выходы блоков обозначены буквами, а входы цифрами) подключен к входу 3 задания частоты микропроцессорного вычислителя 2. Вход выпрямителя 6 подключен к силовому входу 5 станции 1 управления. Станция 1 дополнительно содержит выходной фильтр 11 и второй блок 12 датчиков тока. Выход инвертора 8 подключен через первый блок 10 датчиков тока к входу выходного фильтра 11. Выход фильтра 11 через второй блок 12 датчиков тока подключен к выходу 13 станции 1 управления. Информационный выход А первого блока 10 датчиков тока подключен к информационному входу 1 микропроцессорного вычислителя 2, причем информационный выход А второго блока 12 датчика тока подключен к информационному входу 2 микропроцессорного вычислителя 2.
На фиг.2 показан пример использования описываемой универсальной станции управления с электронасосной погружной установкой, спущенной в скважину на насосно-компрессорных трубах (НКТ) 33, включающей погружной насос 34, входной модуль 35 и гидрозащиту 36, причем в качестве привода используется вентильный погружной электродвигатель (ВПЭД) 37, который подключен к выходу 13 станции 1 управления через повышающий трансформатор 32.
На фиг.3 показан пример использования описываемой универсальной станции 1 управления с электронасосной погружной установкой, спущенной в скважину на насосно-компрессорных трубах (НКТ) 33, включающей погружной насос 34, входной модуль 35 и гидрозащиту 36, причем в качестве привода используется асинхронный погружной электродвигатель (ПЭД) 39, который подключен к выходу 13 станции 1 управления через повышающий трансформатор 32.
Преобразователь частоты 4 может содержать датчик 31 напряжения (см. фиг.4), а микропроцессорный вычислитель 2 может включать три сумматора 14, 17, 18, регулятор 15 скорости, блок 16 задания тока, два регулятора 19, 20 тока статора, преобразователь 25 координат, блок 27 вычисления скважности, формирователь 30 широтно-импульсной модуляции, два преобразователя 28, 29 тока и блок 26 вычисления. Причем прямой вход (на Фиг.4 прямые входы сумматоров обозначены символом «+», а инверсные - символом «-») первого сумматора 14 подключен к входу 3 задания частоты микропроцессорного вычислителя 2, а выход первого сумматора 14 подключен к входу 1 регулятора 15 скорости, выход А которого подключен к прямому входу второго сумматора 18, выход которого подключен к входу 1 первого регулятора 20 тока статора. Выход А регулятора 20 подключен к входу 1 преобразователя 25 координат, выход А которого подключен к входу 1 блока 27 вычисления скважности и входу 1 блока 26 вычисления, а выход В преобразователя 25 координат подключен к входу 2 блока 27 вычисления скважности и входу 2 блока 26 вычисления. Вход 3 блока 26 вычисления скважности подключен к информационному выходу А датчика 31 напряжения, измерительный вход которого подключен к выходу входного фильтра 7, а выходы А и В блока 27 вычисления скважности подключены, соответственно, к входам 1 и 2 формирователя 30 широтно-импульсной модуляции. При этом выход А блока 16 задания тока подключен к прямому входу третьего сумматора 17, а выход третьего сумматора 17 подключен к входу 1 второго регулятора 19 тока статора. Выход А регулятора 19 подключен ко входу 2 преобразователя 25 координат. Вход 1 первого преобразователя 28 тока подключен к информационному входу 1 микропроцессорного вычислителя 2, а выход А первого преобразователя 28 тока подключен к входу 3 блока 26 вычисления и к входу 2 первого регулятора 20 тока статора, а выход В первого преобразователя 28 тока подключен к входу 4 блока 26 вычисления и к входу 2 второго регулятора 19 тока статора. Вход 1 второго преобразователя 29 тока подключен к информационному входу 2 микропроцессорного вычислителя 2, а выход А второго преобразователя 29 тока подключен к входу 5 блока 26 вычисления и к инверсному входу второго сумматора 18. Выход В второго преобразователя 29 тока подключен к входу 6 блока 26 вычисления и к инверсному входу третьего сумматора 17, причем выход А блока 26 вычисления подключен к входу 3 преобразователя 25 координат, а выход В блока 26 вычисления подключен к инверсному входу первого сумматора 14.
Трехфазное напряжение питающей сети подается на вход 5 станции 1 управления, откуда поступает на выпрямитель 6, который может быть выполнен по схеме мостового управляемого или полууправляемого выпрямителя, что обеспечивает плавный заряд конденсаторов фильтра 7 звена постоянного тока. Фильтр 7 звена постоянного тока обеспечивает сглаживание пульсаций выпрямленного напряжения и может состоять из конденсатора (батареи конденсаторов) и дросселя или только из конденсатора (батареи конденсаторов). Постоянное напряжение с фильтра 7 поступает на инвертор 8, который выполнен по схеме мостового инвертора напряжения и обеспечивает преобразование постоянного напряжения в переменное с заданной контроллером станции управления 3 частотой первой гармоники и определяемой микропроцессорным вычислителем 2 частотой и скважностью широтно-импульсной модуляции. С выхода инвертора 8 напряжение через первый блок 10 датчиков тока, представляющий собой три датчика тока (по одному в каждой фазе), поступает на синус-фильтр 11, выполненный по схеме трехфазного LC-фильтра и обеспечивающий синусоидальную форму напряжения, и далее через второй блок 12 датчиков тока, представляющий собой три датчика тока (по одному в каждой фазе), на выход 13 станции 1 управления. Блоки 10 и 12 датчиков тока формируют на своих информационных выходах трехфазные сигналы, пропорциональные соответственно току фильтра и току статора электромеханического преобразователя (выходному току станции управления).
Контроллер 3 станции 1 управления в зависимости от требуемого режима работы насоса 34 формирует на своем выходе А сигнал, пропорциональный заданной частоте вращения вала электродвигателя 37 или 39, который поступает на прямой вход сумматора 14. На инверсный вход сумматора 14 приходит сигнал, пропорциональный текущей частоте вращения. С выхода сумматора 14 сигнал, пропорциональный разности заданной и текущей частоты вращения (сигнал ошибки) поступает на вход 1 регулятора 15 скорости, который может быть выполнен в виде пропорционально-интегрального регулятора. С выхода А регулятора 15 скорости сигнал, пропорциональный заданному значению тока статора оси q, ортогональной направлению магнитного потока ротора электромеханического преобразователя, подается на прямой вход сумматора 18, на инверсный вход которого поступает сигнал, пропорциональный текущему значению тока статора по оси q. С выхода сумматора 18 сигнал подается на вход 1 регулятора 20 тока статора по оси q, который может быть реализован как пропорционально-интегральный регулятор. На вход 2 регулятора 20 тока поступает сигнал, пропорциональный току фильтра по оси q. На выходе А регулятора 20 тока формируется сигнал, пропорциональный составляющей вектора напряжения по оси q.
Блок 16 задания тока задает ток статора по оси d, совпадающей с направлением магнитного потока ротора электромеханического преобразователя. Сигнал, пропорциональный заданному току статора по оси d поступает на прямой вход сумматора 17, на инверсный вход которого приходит сигнал, пропорциональный текущему току статора по оси d. С выхода сумматора 17 сигнал подается на вход 1 регулятора 19 тока статора по оси d, который может быть реализован как пропорционально-интегральный регулятор. На вход 2 регулятора 19 тока поступает сигнал, пропорциональный току фильтра по оси d. На выходе А регулятора тока 19 формируется сигнал, пропорциональный составляющей вектора напряжения по оси q.
С регуляторов 19, 20 тока сигналы, пропорциональные составляющим напряжения по осям d и q, поступают соответственно на входы 2 и 1 преобразователя 25 координат, на вход 3 которого приходит сигнал, пропорциональный углу относительного положения ротора и статора электромеханического преобразователя. Преобразователь 25 координат обеспечивает преобразование из вращающейся ортогональной системы координат (с осями d и q) в статическую ортогональную систему координат (с осями α и β). С выхода преобразователя координат сигналы, пропорциональные составляющим напряжения по осям α и β поступают на входы 1 и 2 блока 27 вычисления скважности, на вход 3 которого приходит сигнал с датчика 31 напряжения, пропорциональный напряжению в звене постоянного тока преобразователя частоты. Блок 27 вычисления скважности вычисляет 2 интервала времени, в течение которых инвертор 8 будет находиться соответственно в двух из возможных шести ненулевых состояниях. Оставшееся время периода инвертор 8 будет находиться в нулевом состоянии. По полученным интервалам времени формирователь 30 ШИМ формирует шесть сигналов управления инвертором 8, которые поступают на формирователь 9 сигналов управления ключами, который преобразует их в сигналы с уровнями, необходимыми для коммутации ключей инвертора 8.
Сигнал с информационного выхода А блока 10 датчиков тока, пропорциональный текущему трехфазному току фильтра 11, поступает на вход 1 первого преобразователя 28 тока, который преобразует трехфазный ток фильтра 11 в двухфазный (по осям d и q).
Сигнал с информационного выхода А блока датчиков тока 12, пропорциональный, текущему трехфазному току статора электромеханического преобразователя поступает на вход 1 второго преобразователя тока 29, который преобразует трехфазный ток статора в двухфазный (по осям d и q).
Преобразователь 25 координат, блок 27 вычисления скважности, формирователь 30 ШИМ и преобразователи 28 и 29 тока могут быть реализованы подобно тому, как это сделано в работе Чуева П.В. Разработка систем векторного управления асинхронными приводами на базе специализированных сигнальных микроконтроллеров. Диссертация на соискание ученой степени кандидата технических наук, Москва, МЭИ, 2002 г.
Блок 26 вычисления, используя составляющие напряжения по осям α и β, получаемые с преобразователя 25 координат, токи фильтра 11 и статора по осям d и q, получаемые с преобразователей тока 28 и 29, вычисляет текущую частоту вращения ротора и угол относительного положения ротора и статора электромеханического преобразователя. Блок 26 вычисления может быть реализован подобно рассмотренному в первом аналоге.
Предложенная структура универсальной станции управления может быть использована для управления как приводами погружных насосов, так и приводами любых других устройств с вентильными и асинхронными двигателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2507418C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| ЭЛЕКТРОНАСОСНАЯ ПОГРУЖНАЯ УСТАНОВКА | 2005 |
|
RU2303715C1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
Изобретение относится к нефтедобывающему оборудованию, а именно к станциям управления двигателями электроцентробежных насосов для добычи пластовой жидкости. Станция 1 управления содержит контроллер 3, микропроцессорный вычислитель 2, преобразователь частоты 4, включающий выпрямитель 6, фильтр 7 звена постоянного тока, инвертор 8, формирователь 9 сигналов управления ключами. Также в состав станции входят выходной фильтр 11 и два блока 10, 12 датчиков тока. Выход инвертора 8 подключен через первый блок 10 датчиков тока к входу выходного фильтра 11. Выход фильтра 11 через второй блок 12 датчиков тока подключен к выходу 13 станции 1 управления, а информационный выход А первого блока 10 датчиков тока подключен к первому информационному входу микропроцессорного вычислителя 2. Информационный выход А второго блока 12 датчиков тока подключен ко второму информационному входу микропроцессорного вычислителя 8. Изобретение позволяет от одной станции управлять как вентильным, так и асинхронным двигателем, увеличить ресурс оборудования и обеспечить экономию электроэнергии за счет того, что выходное напряжение станции имеет синусоидальную форму, что исключает перенапряжение в электроцепи и отсутствие дополнительных потерь от высших гармоник, снижает пульсации момента на валу электродвигателя. 1 з.п. ф-лы, 4 ил.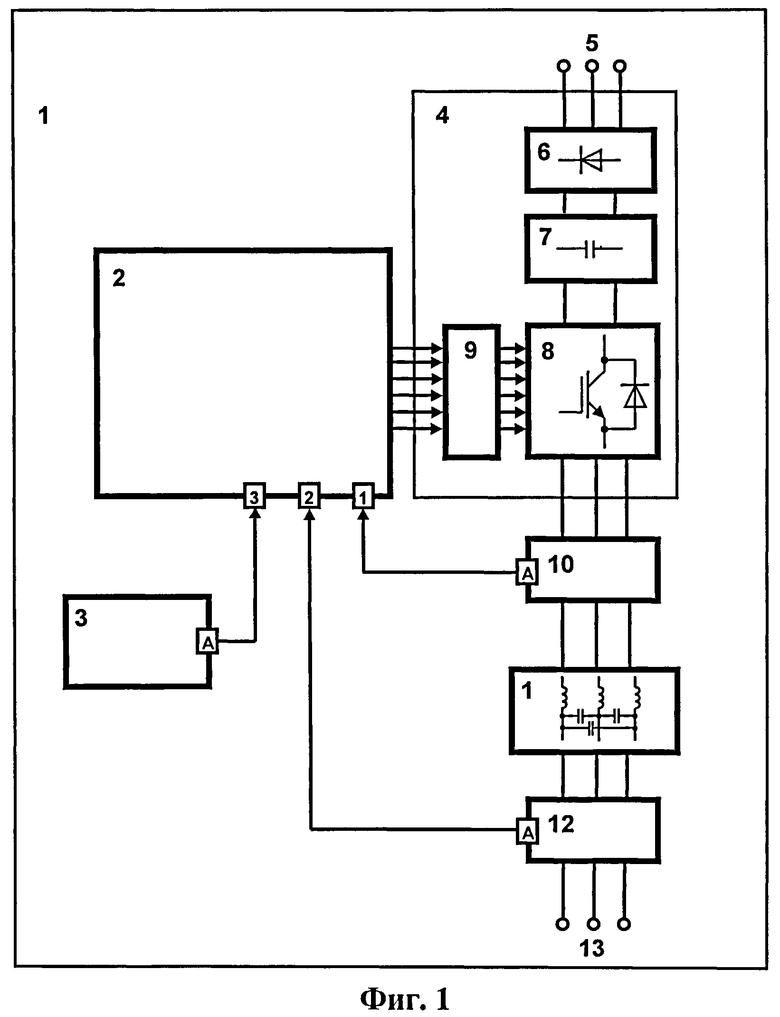
1. Универсальная станция управления погружным электронасосом, содержащая микропроцессорный вычислитель, преобразователь частоты, состоящий из последовательно соединенных выпрямителя, фильтра звена постоянного тока, инвертора и формирователя сигналов управления ключами, входы которого подключены к выходу микропроцессорного вычислителя, первый блок датчиков тока и контроллер, выход которого подключен к входу задания частоты микропроцессорного вычислителя, причем вход выпрямителя подключен к силовому входу станции управления, отличающаяся тем, что дополнительно содержит выходной фильтр и второй блок датчиков тока, причем выход инвертора подключен через первый блок датчиков тока к входу выходного фильтра, выход которого через второй блок датчиков тока подключен к выходу станции управления, а информационный выход первого блока датчиков тока подключен к первому информационному входу микропроцессорного вычислителя, причем информационный выход второго блока датчиков тока подключен ко второму информационному входу микропроцессорного вычислителя.
2. Универсальная станция управления по п.1, отличающаяся тем, что преобразователь частоты содержит датчик напряжения, а микропроцессорный вычислитель включает три сумматора, регулятор скорости, блок задания тока, два регулятора тока статора, преобразователь координат, блок вычисления скважности, формирователь широтно-импульсной модуляции, два преобразователя тока и блок вычисления, причем прямой вход первого сумматора подключен к входу задания частоты микропроцессорного вычислителя, а выход первого сумматора подключен к входу регулятора скорости, выход которого подключен к прямому входу второго сумматора, выход которого подключен к первому входу первого регулятора тока статора, выход которого подключен к первому входу преобразователя координат, первый выход которого подключен к первому входу блока вычисления скважности и первому входу блока вычисления, а второй выход преобразователя координат подключен ко второму входу блока вычисления скважности и второму входу блока вычисления, причем третий вход блока вычисления скважности подключен к информационному выходу датчика напряжения, вход которого подключен к выходу входного фильтра, а выходы блока вычисления скважности подключены к формирователю широтно-импульсной модуляции, при этом выход блока задания тока подключен к прямому входу третьего сумматора, а выход третьего сумматора подключен к первому входу второго регулятора тока статора, выход которого подключен ко второму входу преобразователя координат, причем вход первого преобразователя тока подключен к первому информационному входу микропроцессорного вычислителя, а первый выход первого преобразователя тока подключен к третьему входу блока вычисления и ко второму входу первого регулятора тока статора, а второй выход первого преобразователя тока подключен к четвертому входу блока вычисления и ко второму входу второго регулятора тока статора, причем вход второго преобразователя тока подключен ко второму информационному входу микропроцессорного вычислителя, а первый выход второго преобразователя тока подключен к пятому входу блока вычисления и к инверсному входу второго сумматора, а второй выход второго преобразователя тока подключен к шестому входу блока вычисления и к инверсному входу третьего сумматора, причем первый выход блока вычисления подключен к третьему входу преобразователя координат, а второй выход блока вычисления подключен к инверсному входу.
| ЭЛЕКТРОНАСОСНАЯ ПОГРУЖНАЯ УСТАНОВКА | 2005 |
|
RU2303715C1 |
| ЭЛЕКТРОНАСОСНАЯ ПОГРУЖНАЯ УСТАНОВКА | 1997 |
|
RU2137945C1 |
| KR 100908385 B1, 20.07.2009 | |||
| JP 8338391 A, 24.12.1996. | |||

