ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе разгрузки в электроэнергетической системе для стабилизации электрической частоты, доставляемой электроэнергетической системой.
УРОВЕНЬ ТЕХНИКИ
Электроэнергетические системы должны непрерывно отслеживать и поддерживать баланс между генерируемой энергией и нагрузки с целью обеспечения безопасной и надежной работы. Мерой баланса активной мощности является скорость вращения синхронных генераторов и, следовательно, частота генерируемого переменного электрического напряжения. Частота задается на стандартное номинальное значение (например, 50 Гц в Европе, 60 Гц в США). Безопасный рабочий диапазон частот определяется согласно возможности генераторов оставаться соединенными с энергетической системой без повреждений. Например, когда номинальная частота составляет 50 Гц, безопасным диапазоном работы, как правило, является от 51,5 Гц до 47,5 Гц. За пределами этого диапазона каждый генератор будет иметь уровень частот, при котором его необходимо будет отключить для его защиты. Дисбаланс между выработкой активной мощности и нагрузкой приводит к отклонения частоты от номинального значения. Если внезапно теряется большое количество вырабатываемой активной мощности, например, ввиду отключения генераторного блока, то частота упадет. Если это останется без проверки, генераторы отключатся, что приведет к серьезной перегрузке системы, при которой потребность намного превышает подачу, что в конечном счете приводит к общему спаду частоты и длительному сбою в системе или выключению.
Одним способом, которым электроэнергетические системы, как правило, устраняют такой дисбаланс, заключается в выборочном отключении нагрузки от системы, когда частота падает ниже номинального значения, но перед достижением критически низкой частоты безопасного рабочего диапазона. Этот механизм в целом называется автоматической частотной разгрузкой или АЧР. В большинстве традиционных систем, заранее определенные блоки нагрузки разгружаются каскадами, при этом каждый каскад запускается при конкретной пороговой частоте в пределах безопасного рабочего диапазона частоты. Различные системы варьируются в части количества используемых каскадов, количества нагрузки, отключаемой за один каскад, пороговых значений частоты и мощности суммы всех каскадов, т.е. общей возможной отключенной нагрузки. Разгрузка используется для восстановления баланса активной мощности между выработкой и нагрузкой и, следовательно, возврата частоты на номинальное значение.
Однако, когда отключенная за один каскад нагрузка превышает потерянную выработанную мощность, существует риск того, что частота избыточно возрастает изначально с превышением верхнего предела безопасного диапазона частоты, вызывая отключение одного или более дополнительных генераторных блоков. В свою очередь, это приводит к еще одному падению частоты, которое в этот раз происходит быстрее ввиду меньшей инерции в системе. Получаемая в результате нестабильность может привести к сбою в системе. Этот риск может быть уменьшен за счет обеспечения возможности более постепенного снижения нагрузки, например, путем увеличения количества каскадов, уменьшая, таким образом, количества снижаемой нагрузки за один каскад. Однако увеличение количества каскадов требует полной переконфигурации защитной схемы АЧР, которая является сложной, поскольку она требует широкой модификации различных второстепенных каскадов и, в некоторых случаях, не разрешена регуляторными требованиями в отношении местных энергосетей. Кроме того, увеличение количества каскадов, подлежащих отключению перед достижением нижнего предела безопасного диапазона частоты, влияет на время реагирования системы на масштабное событие, т.е. на событие, вызывающее резкое падение частоты, поскольку отключение каждого блока нагрузки имеет свойственную ему задержку за счет работы прерывателей реле и цепи. Таким образом, когда некоторое событие приводит к быстрому снижению частоты, может получиться так, что несколько блоков нагрузки запускаются перед фактическим отключением связанных нагрузок с риском снижения непропорционального количества нагрузки, что приводит к превышению частоты. Конфигурация системы защиты АЧР потенциально также является более сложной, поскольку отдельные фидеры нагрузки зачастую подвержены различным потокам мощности, зависящими, например, от времени года, дня недели или времени суток, при этом для компенсации таких вариаций может быть выбран большой блок фидеров нагрузки. Проблема еще больше усугубляется повышением широкого использования генераторных блоков на основе преобразователей, которые используют энергию от возобновляемых источников. Неустойчивый характер таких генераторных блоков означает, что электроэнергетическая система с высоким проникновением таких источников распределенной энергии будет подвержена более сильным вариациям потока мощности.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в представлении способа и устройства для разгрузки, выполненного с возможностью ослабления эффектов дисбаланса мощности в электроэнергетической системе более гибким образом по сравнению с системами уровня техники. Еще одна задача заключается в представлении способа и устройства, выполненного с возможностью улучшенной адаптации к превалирующему состоянию дисбаланса мощности.
В соответствии с настоящим изобретением, указанная выше задача решается благодаря способу разгрузки в электроэнергетической системе, причем электроэнергетическая система содержит по меньшей мере одно устройство, которое электрически соединяет по меньшей мере одну фидерную линию нагрузки с электроэнергетической системой, при этом по меньшей мере одна фидерная линия нагрузки подает энергию от указанной электроэнергетической системы на один или более потребителей энергии. Способ включает следующие этапы: слежение за электрической частотой электроэнергетической системы; слежение за параметром стабильности частоты, при этом параметр стабильности частоты зависит от скорости изменения электрической частоты электроэнергетической системы; генерирование управляющего сигнала на отключение по меньшей мере одной фидерной линии нагрузки по меньшей мере одним устройством, когда отслеживаемая частота меньше или равняется по меньшей мере одному заранее определенному пороговому значению частоты отключения, а отслеживаемый параметр стабильности частоты равняется или вышел за пределы по меньшей мере одного заранее определенного порогового значения параметра стабильности частоты.
Благодаря использованию параметра стабильности частоты, который зависит от скорости изменения частоты, в дополнение к критерию фиксированного падения частоты для принятия решения в отношении того, когда следует снижать нагрузку, обеспечивается возможность отсрочки или даже предотвращения отключения нагрузки в некоторых случаях, что, следовательно, существенно снижает риск превышения частоты. Параметр стабильности частоты по существу служит в качестве указателя серьезности отклонения от номинальной частоты. Кроме того, поскольку скорость изменения частоты по своей природе является намного более колеблющейся по сравнению с самой частотой, не все защитные устройства будут обнаруживать выход за пределы порогового значения параметра стабильности частоты в одно и то же время. Таким образом, существующие каскады, определенные пороговыми значениями частоты, эффективным образом разбивают на более чем один каскад, обеспечивая возможность более постепенного снижения нагрузки, что лучше отражает дефицит активной мощности. Таким образом, способ особенно подходит для электроэнергетических систем, которые имеют высокую долю неустойчивых источников возобновляемой энергии на основе преобразователей.
В соответствии с еще одним вариантом реализации настоящего изобретения, способ включает этапы генерирования управляющего сигнала на отключение по меньшей мере одной фидерной линии нагрузки по меньшей мере одним устройством, когда отслеживаемая частота меньше или равняется заранее определенному пороговому значению частоты отключения (fthr,i) и отслеживаемый параметр стабильности частоты равняется или вышел за пределы первого заранее определенного порогового значения параметра стабильности частоты (Mthr,i1), и генерирования указанного управляющего сигнала на отключение по меньшей мере еще одной фидерной линии нагрузки по меньшей мере одним устройством, когда отслеживаемая частота меньше или равняется заранее определенному пороговому значению частоты отключения (fthr,i) и отслеживаемый параметр стабильности частоты равняется или вышел за пределы второго заранее определенного порогового значения параметра стабильности частоты (Mthr,i2). Таким образом, обеспечивается возможность активной разбивки существующих каскадов на случайное количество вспомогательных каскадов путем простого применения более чем одного порогового значения параметра стабильности частоты к каждому пороговому значению частоты. Следовательно, реагирование системы на внеплановый дефицит мощности существенно улучшается, при этом существенно снижая риск прекращения подачи энергии.
Предпочтительно, параметр стабильности частоты представляет собой время, оставшееся до того момента, когда отслеживаемая частота упадет до заранее определенного нижнего предела частоты, и, следовательно, обеспечивает указание резерва или допуска, доступного перед тем, как дополнительная нагрузка должна быть снижена. Таким образом, упрощается выбор подходящего резерва для каждого каскада разгрузки.
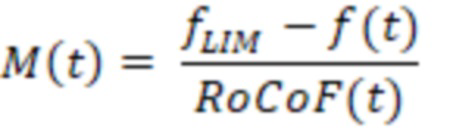
В соответствии с предпочтительным вариантом реализации изобретения, этапы слежения включают определение электрической частоты электроэнергетической системы в момент времени t, определение скорости изменения частоты в указанный момент времени t и определение параметра стабильности частоты M(t) из определенной частоты и скорости изменения частоты. Таким образом, решение в отношении того, необходимо ли отключить нагрузку от системы, может быть принято на основе локально измеренных и вычисленных значений, а не путем приема некоторых или всех этих значений из места с другим географическим расположением (например, центра управления). В любом случае, этап определения параметра стабильности частоты M(t), преимущественно, может включать применение следующего уравнения
 где f(t) - это определенная электрическая частота электроэнергетической системы в момент времени t, RoCoF(t) - это скорость изменения указанной частоты в момент времени t, а fLIM - это заранее определенный нижний предел частоты.
где f(t) - это определенная электрическая частота электроэнергетической системы в момент времени t, RoCoF(t) - это скорость изменения указанной частоты в момент времени t, а fLIM - это заранее определенный нижний предел частоты.
В соответствии с еще одним предпочтительным вариантом реализации изобретения, способ включает прием значений по меньшей мере одного из заранее определенного порогового значения частоты отключения, заранее определенного порогового значения параметра стабильности частоты или нижнего предела частоты от удаленного контроллера. Благодаря обеспечению возможности удаленного регулирования или конфигурирования параметров системы для разгрузки, например, провайдером коммунальных услуг, система может быть модифицирована для наилучшей адаптации к превалирующей конфигурации и состояниям системы.
Предпочтительно, этап слежения за электрической частотой электроэнергетической системы включает слежение за частотой напряжения, подаваемого указанной электроэнергетической системой.
Указанные выше задачи также решаются благодаря устройству для электрического соединения и отсоединения по меньшей мере одного заранее определенного блока нагрузки от электроэнергетической системы, при этом устройство содержит контроллер, выполненный с возможностью слежения за электрической частотой электроэнергетической системы, с возможностью слежения за параметром стабильности частоты, при этом указанный параметр стабильности частоты зависит от скорости изменения электрической частоты электроэнергетической системы, и с возможностью генерирования управляющего сигнала на отключение по меньшей мере одного блока нагрузки от электроэнергетической системы, когда отслеживаемая частота меньше или равняется по меньшей мере одному заранее определенному пороговому значению частоты отключения и определенный параметр стабильности частоты равняется или вышел за пределы по меньшей мере одного порогового значения параметра стабильности частоты.
Настоящее изобретение также относится к компьютерному программному продукту, содержащему инструкции, когда при исполнении на по меньшей мере одному процессоре обуславливают выполнение указанного выше способа по меньшей мере одним процессором.
Дополнительные задачи и преимущества решаются и достигаются благодаря прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Представленные выше сведения станут ясны из представленного далее описания примера варианта реализации, проиллюстрированного на сопроводительных чертежах. Чертежи не выполнены в масштабе, вместо этого внимание должно быть уделено иллюстрации примеров варианта реализации.
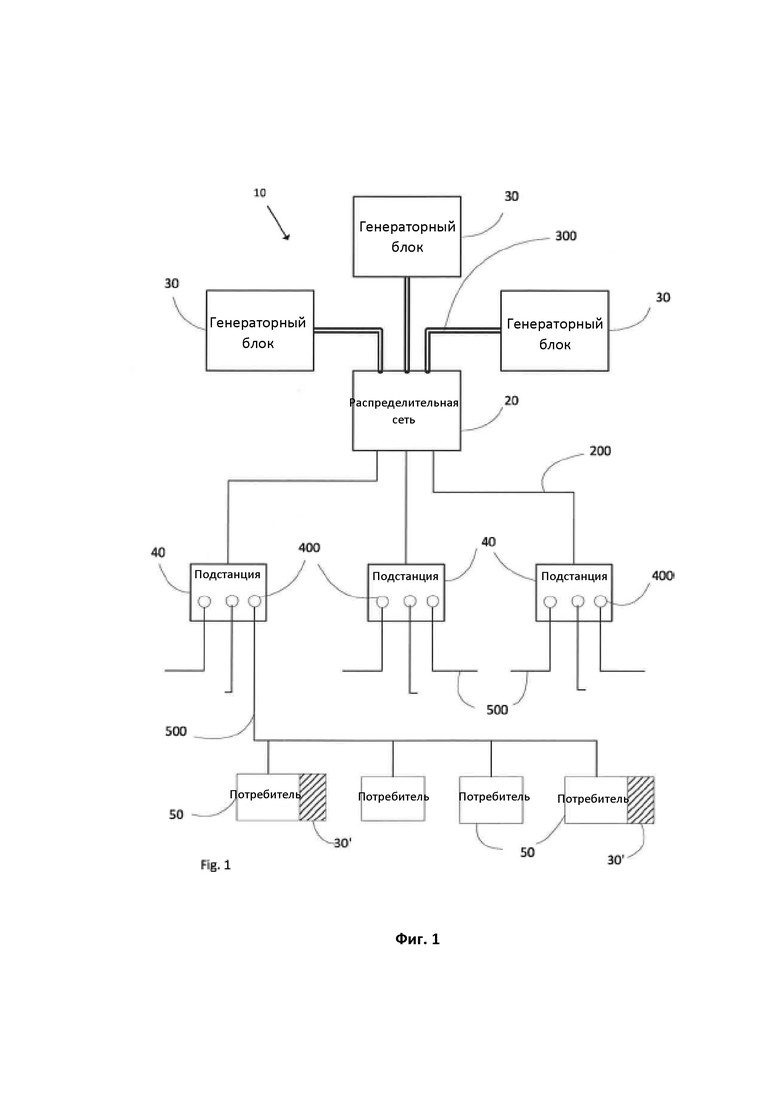
На фиг. 1 схематически изображена электроэнергетическая система.
На фиг. 2 показано два графика, иллюстрирующих принцип автоматической частотной разгрузки, используемый в традиционных системах.
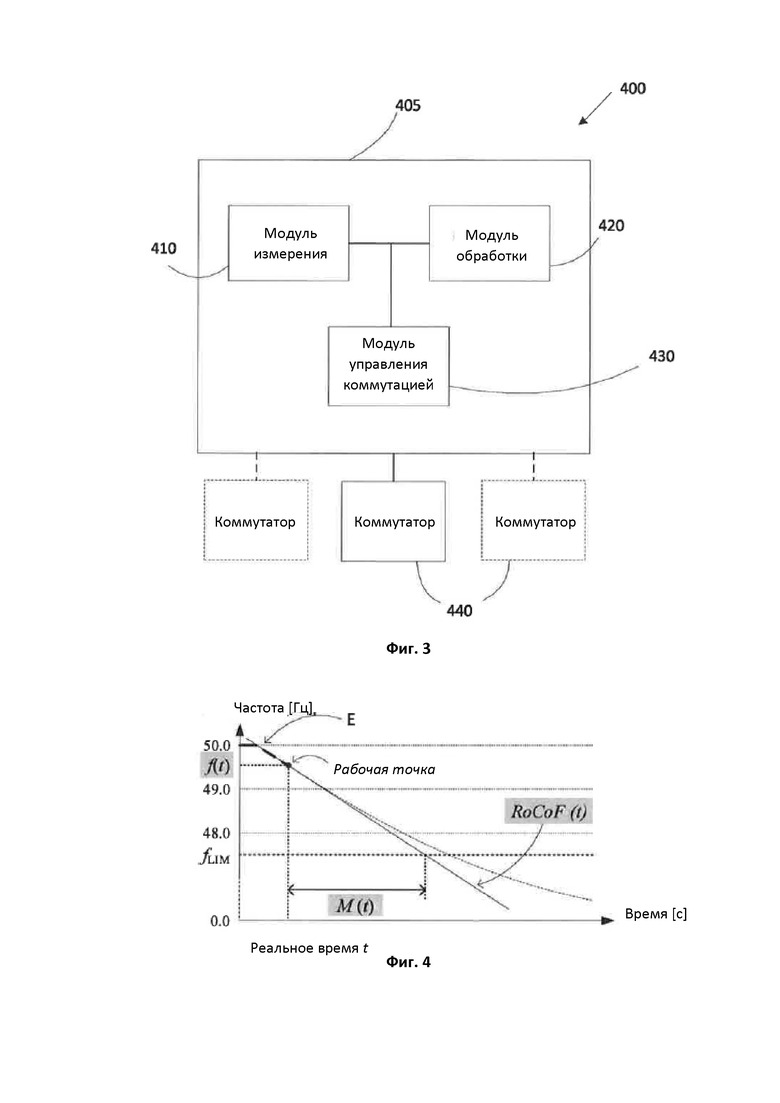
Фиг. 3 представляет собой схематическую иллюстрацию устройства для электрического отключения одной или более нагрузок от системы вырабатывания электроэнергии, согласно настоящему изобретению.
Фиг. 4 представляет собой график, иллюстрирующий резерв стабильности частоты M(t), в соответствии с вариантом реализации настоящего изобретения.
Фиг. 5 представляет собой график, показывающий реагирование частоты энергетической системы с течением времени в нескольких условиях дефицита активности мощности, без операции АЧР.
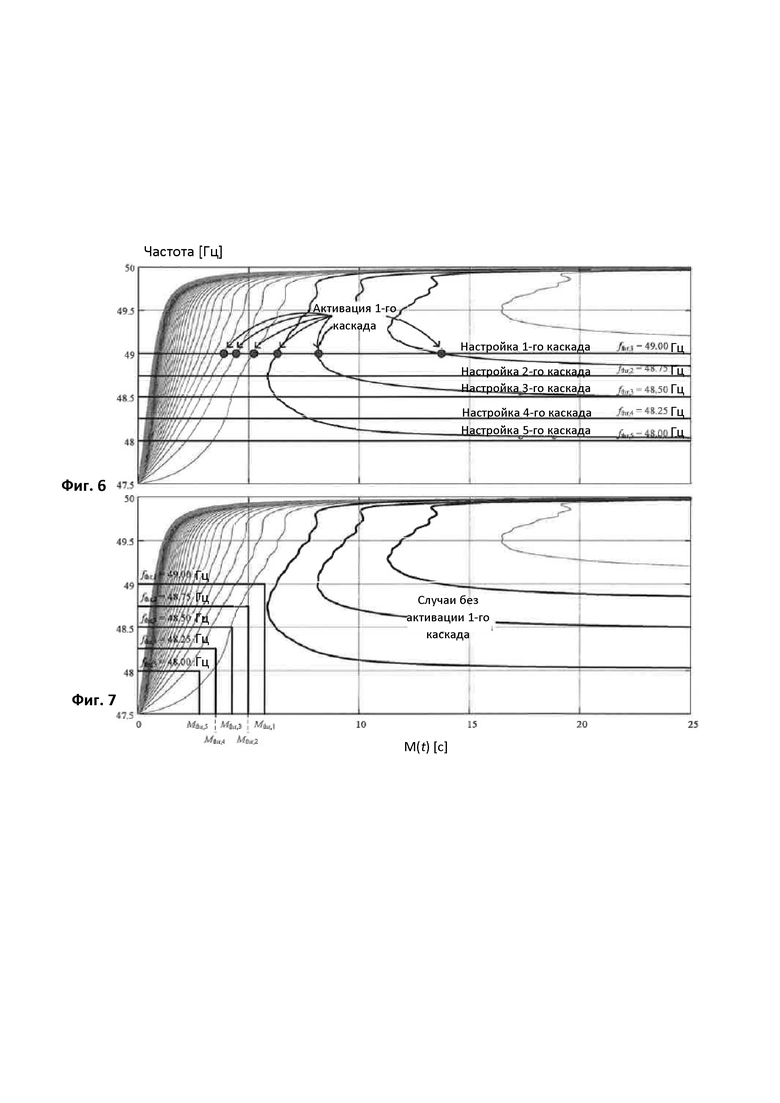
Фиг. 6 представляет собой график, показывающий частоту с зависимостью от резерва стабильности частоты M(t) в условиях дефицита активной мощности, показанных на фиг. 5.
На фиг. 7 изображена разгрузка, использующая резерв стабильности частоты M(t), изображенный на графике по фиг. 6.
На фиг. 9 показан график, иллюстрирующий модификацию использования резерва стабильности частоты в Фиг. 8 представляет собой блок-схему способа разгрузки согласно настоящему изобретению.
качестве критерия для разгрузки.
На фиг. 10 показаны графики, иллюстрирующие улучшение между традиционной схемой АЧР и модифицированной схемой АЧР.
ПОДРОБНОЕ ОПИСАНИЕ
Аспекты настоящего изобретения будут более полно описаны далее со ссылкой на сопроводительные чертежи. Следует понимать, что устройство и способ, раскрытые в настоящем документе, могут быть реализованы во множестве различных форм и не должны толковаться в качестве ограничения аспектов, изложенных в настоящем документе. Терминология, используемая в настоящем документе, представлена лишь для описания конкретных аспектов, а не для ограничения изобретения.
На фигуре 1 схематически показан пример электроэнергетической системы 10. Система 10 содержит ряд генераторных блоков 30. Эти генераторные блоки могут содержать традиционные энергетические станции, такие как газовые, ядерные или подобные, которые, как правило, имеют высокие коэффициенты инерции, а также генераторные блоки на основе преобразователей, питаемые источниками возобновляемой энергии, такие как солнечные энергетические установки, установки с ветряными турбинами или подобные, которые не проявляют никакой инерции (если только не предполагается специализированное управление в преобразователе на основе искусственной инерции). Каждый генераторный блок в изображенном примере соединен с распределительной сетью 20 через линии 300 передач, по которым подается вырабатываемая энергия. Распределительная сеть 20, в свою очередь, подает энергию на множество подстанций 40. Каждая подстанция выдает энергию потребителям 50 по одной или более фидерным линиям 500 нагрузки, которые изображены пунктирными линиями. Каждая подстанция 40 дополнительно содержит устройство 400 разгрузки для электрического отключения или подключения одной или более фидерных линий 500 нагрузки с электроэнергетической системой. Потребители 50 включают в себя жилые дома, коммерческие площади и промышленные предприятия. Совместно, потребители 50 представляют собой нагрузку электроэнергетической системы. Потребители 50 также могут включать в себя распределенные генераторные блоки, которые схематически обозначены затененными областями 30’, что может существенно влиять на поток активной мощности в точке соединения фидерных линий 500 нагрузки.
Когда происходит событие, приводящее к дефициту активной мощности системы (дефициту выработки), частота системы падает с установленной номинальной частоты (как правило, 50 Гц). Для восстановления баланса и номинальной частоты, в электроэнергетических системах традиционно используется схема разгрузки, в которой заранее определенные блоки нагрузки отключаются от системы каскадами, при этом каждый каскад запускается для отключения при конкретном пороговом значении частоты. На фиг. 2 показано два графика, которые иллюстрируют влияние различных схем разгрузки на частоту системы с течением времени. На верхнем графике показана взаимосвязь между различными количествами дефицита активной мощности, наложенного на энергетическую систему (по горизонтальной оси), и общим количеством отключенной нагрузки (по вертикальной оси), когда только пороговое значение частоты рассматривается в качестве критерия разгрузки. Различные кривые представляют собой результаты с меняющимися количествами этапов разгрузки (обозначены, как «n»). На графике слева показана минимальные и максимальные значения частоты, полученные в ходе реагирования частоты энергетической системы в условиях, изображенных на верхнем графике. В каждом случае изображено семь отдельных схем. Эти схемы отличаются количеством используемых каскадов разгрузки (от 4 каскадов до 10 каскадов) и количеством нагрузки, отключенной на каждом каскаде, однако для каждого случая снижается равное количество нагрузки (мощности) за один каскад, а сумма сниженной нагрузки во всех случаях составляет 50%. На обоих графиках темно-серой линией обозначены значения частоты для 4-каскадного варианта разгрузки, а черной линией обозначены значения частоты для 10-каскадного варианта. Оставшиеся схемы изображены светло-серым цветом. Как можно увидеть на верхнем графике по фиг. 2, кривые отключенной нагрузки показывают пошаговую форму, при этом каждый каскад соответствует отключению заранее определенного блока фидеров нагрузки. В изображенной 4-каскадной схеме отключение 12,5% нагрузки запускается каждый раз, когда частота падает ниже 49 Гц, 48,7 Гц, 48,4 Гц и 48 Гц. В 10-каскадной схеме 5% нагрузки отключается каждый раз, когда частота падает на 0,1 Гц между 49 Гц и 48 Гц. Из самого нижнего графика очевидно, что максимальное значение частоты выполняет скачок вверх при отключении вновь запущенного блока. В случае 4-каскадной схемы, изображенной темно-серым цветом, этот скачок согласованным образом превышает 52 Гц, что является верхним пределом безопасного диапазона частоты. Таким образом, для 4-каскадной схемы существует риск того, что генераторные блоки отключатся в ответ на это превышение, что может привести к падению частоты с большей скоростью и, в конечном итоге, вызвать сбой в системе. Данная проблема не очевидна для 10-каскадной схемы, обозначенной черной линией, поскольку здесь верхняя частота не превышает 51 Гц. Однако переконфигурация каскадов является сложной и длительной процедурой. Кроме того, увеличение количества каскадов может снизить способность системы реагировать на масштабные события ввиду времени реагирования каждого каскада разгрузки.
В ответ на недостатки существующих схем разгрузки, ниже описано альтернативное решение, которое обеспечивает повышенную гибкость и более мягкую стабилизацию нагрузки при минимальной переконфигурации существующих защитных систем АЧР.
Переходя далее к фиг. 3, на ней показано схематическое представление устройства 400 для разгрузки, согласно варианту реализации настоящего изобретения. Это устройство 400 может быть реализовано в виде реле, такого как реле защиты от снижения частоты, или, в качестве альтернативы, управлять одним или более отдельными реле, которые могут быть расположены локально или в удаленных от устройства местах.
Как изображено на фиг. 3, устройство 400 содержит контроллер 405 для управления одним или более коммутаторами или реле 440. Контроллер 405 представлен тремя функциональными модулями 410, 420, 430, которые соединены между собой. Они включают в себя модуль 410 измерения, модуль 430 управления коммутацией и модуль 420 обработки. Модуль 430 управления коммутацией генерирует сигналы для управления одним или более коммутаторами или реле 440. Каждый из этих коммутаторов 440 выборочно электрически соединяется или отсоединяется от одной или более фидерных линий 500 нагрузки (см. фиг. 1).
Модуль 410 измерения измеряет частоту напряжения в режиме реального времени и выдает значение, являющееся показательным в отношении частоты в этот момент времени f(t). Эту частоту f(t) следует понимать, как частоту электроэнергетической системы. Предпочтительно, модуль 410 делает выборку принятого напряжения с заранее определенной частотой выборки. Эта измеренная частота f(t) используется модулем 420 обработки для определения значения, являющегося показательным в отношении скорости изменения частоты в этот же момент времени (RoCoF(t)). Скорость изменения частоты (RoCoF(t)) в момент времени t вычисляется за заранее определенное временное окно (или заранее определенное количество выборок), которое является достаточно коротким для обеспечения устройству 400 возможности выявления существенных изменений в частоте, при этом игнорируя слабые колебания. Основываясь на этих измерениях, модуль 420 обработки вычисляет еще один параметр, а именно, параметр стабильности частоты M(t), который будет описан более подробно ниже со ссылкой на фиг. 4. Модуль 420 обработки также сравнивает значение параметра стабильности частоты M(t) с заранее заданным пороговым значением параметра стабильности частоты Mthr,i, а также измеренную частоту f(t) с соответствующим пороговым значением частоты fthr,I. Только в том случае, если модуль обработки определяет, что оба пороговых значения были достигнуты или имел место выход за их пределы, то модуль 430 управления коммутацией генерирует команду на управление одним или более коммутаторами 440 для отключения фидерных линий нагрузки, которые с ними соединены, тем самым снижая заранее определенное количество нагрузки на электроэнергетическую систему.
Несмотря на то, что модули измерения, обработки и управления коммутацией показаны на фиг. 2 в виде отдельных элементов, следует понимать, что соответствующие функции могут быть реализованы одним процессором или группой процессоров с соответствующим программным обеспечением. Кроме того, следует понимать, что функция модуля 410 измерения может выполняться отдельным приспособлением, а результаты могут передаваться на модули 420, 430 обработки и управления в контроллере 405 посредством проводного или беспроводного соединения.
Устройство может содержать один коммутатор или реле 440, как обозначено сплошной линией на фиг. 2, и может использоваться в качестве защитного устройства для одного блока нагрузки. В этом случае, устройство 400 может быть реализовано в виде традиционного управляемого процессором реле автоматической частотной разгрузки, которое модифицировано для определения и применения дополнительного критерия снижения нагрузки резерва стабильности частоты M(t). Будучи выполненным таким образом, устройство будет работать для снижения всей локальной нагрузки, когда имел место выход за пределы порогового значения частоты и связанного порогового значения стабильности частоты. В качестве альтернативы, устройство 400 может быть выполнено с возможностью управления несколькими реле, т.е. коммутатором 440, обозначенным сплошной линией на фиг. 2, и дополнительными коммутаторами 440, обозначенными пунктирными линиями. В этом случае, коммутатор или коммутаторы могут быть расположены в отдельном приспособлении и даже могут находиться в удаленном месте. Соединение между контроллером 405 и одним или более коммутаторами 440 может быть проводным или беспроводным. В последнем случае, устройство 400 будет выполнено с возможностью слежения за несколькими пороговыми значениями частоты fthr,I и будет применять соответствующие пороговые значения для параметра стабильности частоты Mthr,i для каждого каскада. Коммутаторы 440, которые отключают фидерные линии 500 нагрузки, затем группируются в каскады, при этом каждый каскад отключается, когда были достигнуты соответствующие пороговые значения частоты и параметра стабильности частоты.
В более общем смысле, устройство 400 действует для отключения одной или более фидерных линий нагрузки путем сравнения условий электроэнергетической системы со значениями параметров разгрузки. Как было описано выше, устройство 400 получает мгновенное значение частоты f(t) принятого электрического напряжения, а также скорость изменения частоты RoCoF(t) принятого напряжения. Устройство 400 затем сравнивает значение мгновенной частоты и дополнительный параметр, а именно, параметр стабильности частоты M(t), с пороговыми значениями для каждого каскада разгрузки. Параметр стабильности частоты M(t) дает информацию в отношении серьезности дефицита активной мощности. В своей наиболее простой форме, параметр стабильности частоты M(t) может быть представлен скоростью изменения частоты RoCoF(t). Благодаря связыванию с традиционными пороговыми значениями частоты для разгрузки и учету нижнего предела частоты fLIM, ниже которого частота не должна падать, обеспечивается возможность определения того, может ли быть задержана разгрузка. Более конкретно, когда скорость изменения частоты является высокой, может быть определено, что для задержки разгрузки остается недостаточно времени перед достижением частотой нижнего предела fLIM, в случае чего, пороговое значение частоты запустит разгрузку. В отличие от этого, более низкая скорость изменения частоты, даже при более низком пороговом значении частоты, может указывать на то, что до достижения нижнего предела частоты fLIM остается некоторый резерв, и, следовательно, разгрузка может быть задержана или даже полностью предотвращена, если скорость изменения частоты после этого падает.
Это считается предпочтительным по меньшей мере на концептуальном уровне, однако тогда, когда параметр стабильности частоты представляет собой резерв времени, остающегося до того, когда частота упадет с текущего измеренного значения до нижнего предела частоты fLIM. Таким образом, параметр стабильности частоты M(t), предпочтительно, выражается следующим образом:
В представленном выше уравнении нижний предел частоты fLIM может быть выбран случайным образом для любой системы, однако в целом он представляет собой минимально допустимую частоту в энергетической системе.
Это более ясным образом проиллюстрировано на фиг. 4, на которой показан график частоты с зависимостью от времени, а также изображено событие дефицита выработки, которое приводит к падению электрической частоты с номинального значения 50 Гц. В данном случае, нижний предел частоты fLIM задается на 47,5 Гц. В этом случае, он представляет собой наименьшую допустимую рабочую частоту; ниже этой частоты генераторные блоки 30 начнут отключаться от электроэнергетической системы 10. Изображенная кривая частоты изначально имеет номинальное значение 50 Гц, однако начинает падает после события, показанного, как Е, при котором нарушен баланс активной мощности. В рабочей точке устройство 400 измеряет частоту f(t) и вычисляет параметр стабильности частоты M(t). Как можно увидеть на фиг. 4, параметр стабильности частоты M(t) представляет собой оценку времени, оставшегося перед тем, как частота достигнет нижнего предела частоты fLIM, предполагая, что она продолжает падать с той же самой скоростью. Фактическое падение частоты обозначено пунктирной линией. Таким образом, параметр M(t) представляет собой резерв, доступный перед тем, как система станет неустойчивой, предполагая, что дефицит активной мощности остается непроверенным.
Влияние на частоту электроэнергетической системы, оказываемое применением порогового значения частоты fthr,i и порогового значения параметра стабильности частоты Mthr,i к каждому каскаду нагрузки, подлежащей снижению, графически показано на фиг. 5-7.
На графике по фиг. 5 изображены кривые частоты с зависимостью от времени, соответствующие различным условиям дефицита активной мощности без разгрузки. На фиг. 6 показан график частоты f(t) с зависимостью от параметра стабильности частоты M(t) для тех же условий дефицита активной мощности, что показаны на фиг. 5. Ясно, что для этих кривых, которые опускаются ниже fLIM на фиг. 5, соответствующие кривые на фиг. 6 сходятся в направлении исходной точки. В отличие от этого, для оставшихся случаев, когда частота падает, при этом оставаясь в пределах безопасного рабочего диапазона, т.е. выше fLIM, на фиг. 5, соответствующие траектории на фиг. 6 рано или поздно будут перенаправлены в направлении правой стороны диаграммы. В этих случаях имеют место соответствующие более высокие значения M(t), что указывает на низкую скорость изменения частоты (RoCoF(t)). Для этих случаев, разгрузка не требуется, поскольку частота остается выше fLIM, а система в конечном итоге способна восстановить баланс. С другой стороны, в остальных случаях разгрузка необходима.
На графике по фиг. 6 изображены пороговые значения частоты (fthr,1 – fthr,5) для 5-каскадной схемы разгрузки, которая в целом используется в традиционных системах АЧР. Из фиг. 6 явным образом следует, что во всех случаях, кроме одного, первый каскад разгрузки активируется при частоте f (t) = fthr,1. Это, явным образом, не обязательно для трех из показанных случаев, поскольку из фиг. 5 следует, что частота в конечном итоге стабилизируется без разгрузки. Благодаря предотвращению ненужной разгрузки, обеспечивается защита потребителей даже от временной потери энергии, а также предотвращается риск ненужного превышения частоты.
На фиг. 7 изображен эффект от применения дополнительного условия разгрузки в форме параметра стабильности частоты Mthr,i в каждом каскаде разгрузки. Путем применения этого дополнительного условия, для этих случаев, имеющих большие значения M(t) (что прогнозирует нарушение fLIM в будущем), активация отдельных каскадов разгрузки блокируется несмотря на нарушение соответствующего порогового значения частоты. Однако активация рассматриваемого каскада по-прежнему может произойти позже при более низкой частоте, когда поверх fthr,i также нарушается вновь введенный критерий Mthr,i. Как можно увидеть на фиг. 7, каждое пороговое значение частоты fthr,I имеет связанное значение резерва стабильности частоты Mthr,I, при этом пороговое значение частоты и пороговое значение параметра стабильности частоты понижаются с каждым последующим каскадом.
Следует отметить, что когда дополнительный критерий параметра стабильности частоты M(t) применяется в различных реле защиты от снижения частоты или устройствах 400, которые настроены на снижение нагрузки при одинаковом пороговом значении номинальной частоты и с одинаковым пороговым значением параметра, Mthr, некоторые устройства отключат нагрузку, а другие могут не зависеть от измененного значения скорости изменения частоты (RoCoF(t)). Причина этого заключается в том, что RoCoF(t) само по себе является более колеблющимся значением по сравнению с частотой, а, следовательно, различные реле могут обнаруживать различные значения в зависимости от момента выборки, и, таким образом, запускать разгрузку для одного и того же каскада в различные моменты времени. Таким образом, введение этого дополнительного критерия в действие, судя по всему, увеличивает количество каскадов без необходимости в переконфигурации системы.
Переходя далее к фиг. 8, на ней изображен способ разгрузки, в соответствии с настоящим изобретением. Этот способ может выполняться в устройстве 400. Способ начинается на этапе 100 с получения мгновенного значения частоты f(t) и скорости изменения частоты RoCoF(t). Эти значения получают путем изменения или от другого устройства, которое выполняет измерение. На этапе 101 вычисляется параметр стабильности частоты M(t) с использованием измеренных значений и фиксированного нижнего предела частоты fLIM, который заранее задан для системы. На этапе 102 частота f(t) сравнивается с пороговым значением частоты fthr,i для рассматриваемого каскада разгрузки, а параметр стабильности частоты, вычисленный на этапе 102, сравнивается с пороговым значением стабильности частоты Mthr,i, соответствующим этому же каскаду. Если одно из условий этапа 102 не удовлетворено, то способ переходит обратно к этапу 100. Только если пороговое значение частоты и пороговое значение параметра стабильности частоты были достигнуты или произошел выход за их пределы, то способ переходит далее с этапа 102 на этап 103, на котором выполняется снижение заранее определенной нагрузки, соответствующей каскаду нагрузки. Когда способ выполняется в одном реле с защитой от снижения частоты, которое работает для одного каскада разгрузки, этот этап будет включать снижение всей локальной нагрузки и способ завершится. В противном случае, на этапе 104, если выявлено, что имеют место дополнительные каскады разгрузки, способ переходит обратно к этапу 100. Когда все нагрузки снижены, способ завершается. Следует отметить, что этот способ применим в равной степени, если параметр стабильности частоты представлен скоростью изменения частоты RoCoF(t), однако в этом случае, соответствующие пороговые значения представляют собой максимальные значения, которые должны быть уравнены или превышены для запуска разгрузки.
Различные пороговые значения для частоты (fthr,i) и параметра стабильности частоты (Mthr,i), а также нижний предел частоты fLIM, могут быть заранее конфигурированы в каждом устройстве 400. В качестве альтернативы, настройки этих параметров могут быть регулируемыми локально или через линию связи с провайдером электроэнергетической системы. Следует отметить, что регулировка нижнего предела частоты fLIM обязательно повлияет на параметр стабильности частоты Mthr,I, при этом нижний предел обеспечивает повышенные резервы и, следовательно, обеспечивает повышенные улучшения при использовании параметра стабильности частоты для разгрузки. Улучшение ослабляется, когда нижний предел частоты fLIM повышается, например, с 47,5 Гц до 48 Гц, будучи неизбежным следствием сужения доступного пространства для маневра для частотного отклонения.
Пороговые значения параметра стабильности частоты, предпочтительно, задаются таким образом, чтобы отражать реагирование частоты в электроэнергетической системе. Одним из наиболее определяющих параметров в отношении этого реагирования частоты является средняя постоянная инерции H. Для систем, имеющих высокую среднюю постоянную инерции, оптимальный параметр стабильности частоты будет выше чем для систем, имеющих более низкую среднюю инерцию. Однако, ввиду того, что низкая средняя инерция H представляет собой наихудшую ситуацию в отношении скорости изменения частоты RoCoF, предпочтительной является настройка порогового значения стабильности частоты Mthr,1 для данного типа системы. Таким образом, предотвращаются ненужные отключения для систем как с низкой, так и с высокой инерцией, что делает это особенно привлекательным для электроэнергетических систем с высоким числом внедренных генераторных блоков на основе преобразователя. Предпочтительным диапазоном параметра стабильности частоты для первого каскада разгрузки (Mthr,1) является 4 - 6 секунд, а наиболее предпочтительно, он составляет 4 секунды. Параметр стабильности частоты для второго каскада разгрузки (Mthr,2), предпочтительно, составляет порядка 2,5 секунд.
Следует отметить, что применение параметра стабильности частоты к запуску разгрузки оказывает наибольшее влияние при позиционировании или предотвращении запуска разгрузки, когда скорость изменения частоты является низкой. Параметр стабильности частоты существенно не изменяет активацию разгрузки, когда скорость изменения частоты (RoCoF) является высокой, т.е., когда сильный дефицит активной мощности происходит внезапно. Однако использованием параметра стабильности частоты не изменяет время последующих каскадов разгрузки, т.е., когда падение частоты было приостановлено исходной разгрузкой и, следовательно, является преимущественным для уменьшения ненужной разгрузки.
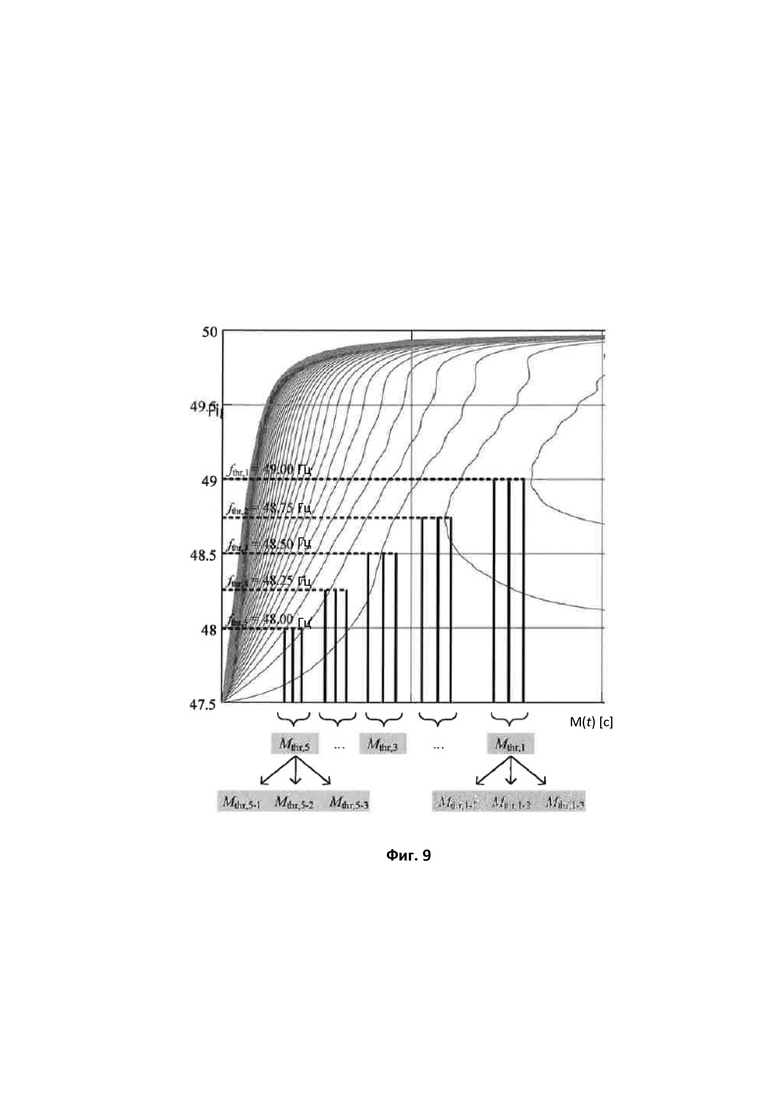
Как было описано выше, использование параметра стабильности частоты в качестве дополнительного критерия частоты для запуска разгрузки может оказывать эффект увеличения количества каскадов разгрузки, когда на одном и том же каскаде работают различные реле для разгрузки, но выявлять различные скорости изменения частоты. Однако параметр стабильности частоты также может быть использован для включения дополнительных промежуточных каскадов разгрузки в систему. Количество частотных каскадов, которое может быть применено в системе, зачастую определяется регуляторными требованиями в отношении местных энергосетей, однако в отношении использования скорости изменения частоты ограничения отсутствуют. Таким образом, обеспечивается возможность удовлетворения этим требованиям в части перепадов используемых частот, при этом включая новые каскады за счет применения нескольких значений Mthr к каждому пороговому значению частоты fthr.
На фиг. 9 показан график частоты с зависимостью от параметра стабильности частоты M(t) для системы, в которой каждому частотному каскаду i присвоено три значения параметра стабильности частоты Mthr,i, обозначенные, как Mthr,i-1, Mthr,i-2 и Mthr,i-3. В ситуациях с высокой скоростью изменения частоты, RoCoF, это не будет играть никакой роли в работе АЧР. С другой стороны, как только скорость изменения частоты была успешно снижена за счет изначальной разгрузки, сегментация существующих каскадов служит для точной регулировки процесса отключения нагрузки. Это изображено на фиг. 10, на которой показан процентное отношение отключенной нагрузки и максимальной и минимальной частоты для различных настроек АЧР для электроэнергетической системы со средней постоянной инерции H, составляющей 6 секунд. Характеристики традиционной схемы АЧР, в которой разгрузка происходит при фиксированных пороговых значениях частоты (традиционная каскадная АЧР), на графиках показаны пустыми кругами, тогда как схема АЧР с включенными в нее вторыми критериями одного порогового значения параметра стабильности частоты на каждый каскад (АЧР с модификацией первой степени) изображена звездочками, а схема АЧР, показанная на фиг. 9 (АЧР с модификацией второй степени), показана темными квадратами. Областью с серым затенением обозначено улучшение по сравнению с традиционной схемой АЧР, обеспеченное только частотой, тогда как областью со штриховкой накрест обозначено дополнительное улучшение по сравнению с модификацией первого уровня с использованием одного параметра стабильности частоты на каскад разгрузки.
Очевидно, что модификация второй степени практически не отражает превышение частоты (частота всегда поддерживается ниже 50,5 Гц). Кроме того, схема показывает повышенный уровень адаптируемости, поскольку отключенная нагрузка практически линейно зависима от дисбаланса активной мощности. Таким образом, достигается уровень эффективности нескольких теоретических широких схем АЧР без необходимости в связи между защитными устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования параметров режима электроэнергетической системы в условиях небаланса мощности | 2022 |
|
RU2777777C1 |
| Способ автоматической частотной разгрузки энергорайона в условиях отклонения показателей качества электроэнергии | 2021 |
|
RU2761859C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЧАСТОТНОЙ РАЗГРУЗКИ ЭНЕРГОСИСТЕМЫ | 1998 |
|
RU2153751C2 |
| Способ автоматической частотной разгрузки энергорайона в условиях отклонения показателей качества электроэнергии | 2021 |
|
RU2759220C1 |
| Способ автоматической частотной разгрузки энергорайона | 2018 |
|
RU2690667C1 |
| Способ комбинированной автоматической частотной разгрузки | 1982 |
|
SU1051646A1 |
| Устройство запрета многоступенчатой автоматической частотной разгрузки (АЧР) энергосистемы | 1982 |
|
SU1072175A1 |
| Устройство для автоматического ограничения повышения частоты в энергосистеме | 1981 |
|
SU1029325A1 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Система автоматического противоаварийного управления нагрузкой в изолированно работающей энергетической системе | 2020 |
|
RU2723544C1 |




Изобретение относится к области электротехники. Предложены способ и устройство для разгрузки в электроэнергетической системе (ЭС). Технический результат заключается в повышении надежности ЭС. ЭС содержит устройство, которое электрически соединяет одну или более фидерных линий нагрузки с ЭС, при этом каждая из фидерных линий нагрузки подает энергию потребителям. Способ включает: слежение за электрической частотой ЭС и слежение за параметром стабильности частоты, который зависит от скорости изменения электрической частоты. Когда отслеживаемая частота меньше или равняется по меньшей мере одному заранее определенному пороговому значению частоты отключения, а отслеживаемый параметр стабильности частоты равняется или вышел за пределы по меньшей мере одного заранее определенного порогового значения параметра стабильности частоты, устройство генерирует управляющий сигнал на отключение указанной по меньшей мере одной фидерной линии нагрузки. Использование параметра стабильности частоты, который зависит от скорости изменения частоты, в дополнение к фиксированному падению частоты в качестве критерия того, когда следует выполнять разгрузку, обеспечивает возможность задержки или даже предотвращения разгрузки, а следовательно, снижает риск превышения частоты, которое может привести к неустойчивости или выключению ЭС. 3 н. и 10 з.п. ф-лы, 10 ил.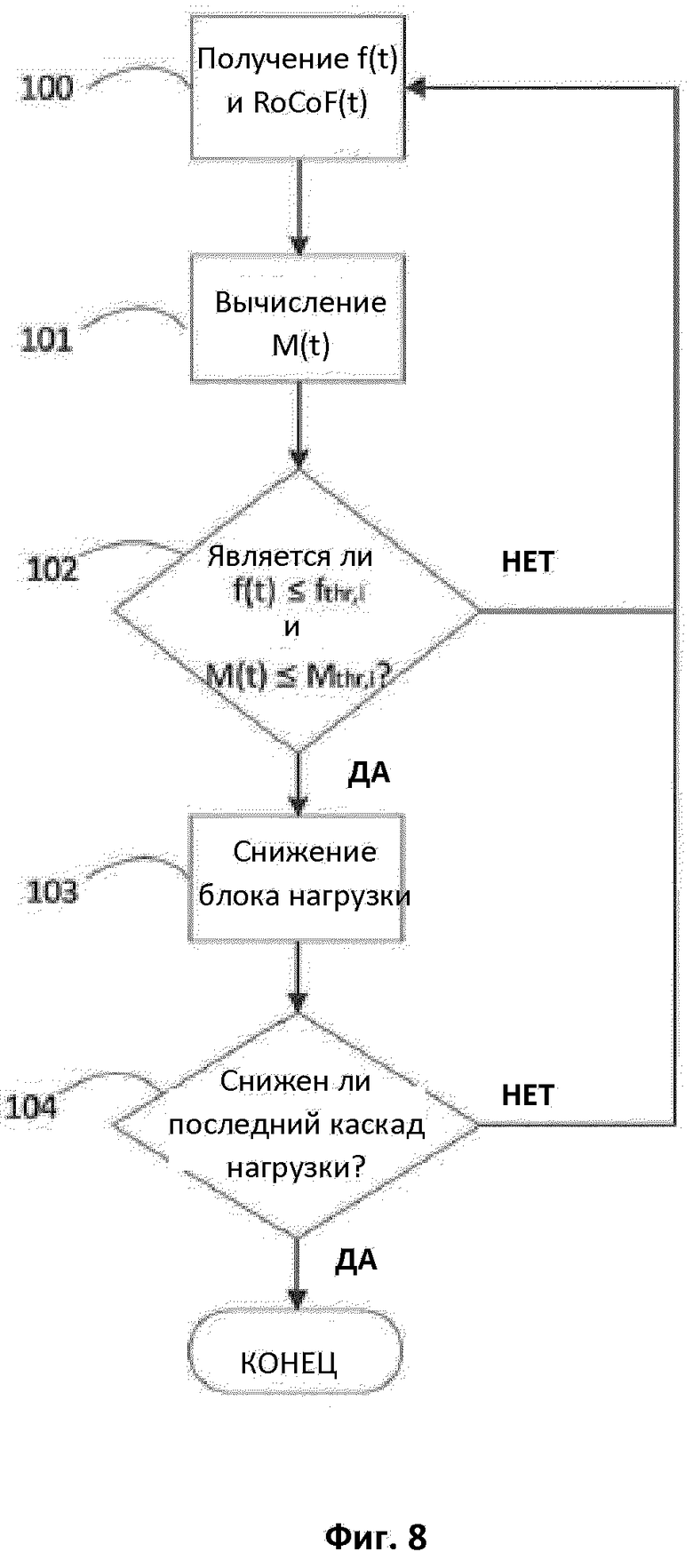
1. Способ разгрузки в электроэнергетической системе, причем электроэнергетическая система содержит по меньшей мере одно устройство, которое электрически соединяет по меньшей мере одну фидерную линию нагрузки с электроэнергетической системой, при этом по меньшей мере одна фидерная линия нагрузки подает энергию от указанной электроэнергетической системы на один или более потребителей энергии, а способ включает следующие этапы:
слежение за электрической частотой электроэнергетической системы;
слежение за параметром стабильности частоты, при этом указанный параметр стабильности частоты зависит от скорости изменения электрической частоты электроэнергетической системы и представляет собой время, оставшееся до того момента, когда частота упадет с измеренного значения до заранее определенного нижнего предела частоты;
генерирование управляющего сигнала на отключение указанной по меньшей мере одной фидерной линии нагрузки указанным по меньшей мере одним устройством, когда отслеживаемая частота меньше или равняется по меньшей мере одному заранее определенному пороговому значению частоты отключения, а указанный отслеживаемый параметр стабильности частоты равняется или вышел за пределы по меньшей мере одного заранее определенного порогового значения параметра стабильности частоты.
2. Способ по п. 1, дополнительно включающий этапы: генерирования указанного управляющего сигнала на отключение по меньшей мере одной фидерной линии нагрузки указанным по меньшей мере одним устройством, когда отслеживаемая частота меньше или равняется заранее определенному пороговому значению частоты отключения (fthr,i) и указанный отслеживаемый параметр стабильности частоты равняется или вышел за пределы первого заранее определенного порогового значения параметра стабильности частоты (Mthr,i1), и генерирования указанного управляющего сигнала на отключение по меньшей мере еще одной фидерной линии нагрузки указанным по меньшей мере одним устройством, когда отслеживаемая частота меньше или равняется указанному заранее определенному пороговому значению частоты отключения (fthr,i) и указанный отслеживаемый параметр стабильности частоты равняется или вышел за пределы второго заранее определенного порогового значения параметра стабильности частоты (Mthr,i2).
3. Способ по любому из предыдущих пунктов, отличающийся тем, что указанные этапы слежения включают определение электрической частоты электроэнергетической системы в момент времени t, определение скорости изменения частоты в указанный момент времени t и определение параметра стабильности частоты M(t) из указанной определенной частоты и скорости изменения частоты.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что указанный этап определения параметра стабильности частоты M(t) включает применение следующего уравнения
 ,
,
где f(t) - это определенная электрическая частота указанной электроэнергетической системы в момент времени t, RoCoF(t) - это скорость изменения указанной частоты в момент времени t, а fLIM - это заранее определенный нижний предел частоты.
5. Способ по любому предыдущему пункту, дополнительно включающий прием значений по меньшей мере одного из указанного заранее определенного порогового значения частоты отключения, указанного заранее определенного порогового значения параметра стабильности частоты и указанного нижнего предела частоты от удаленного контроллера.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что указанный этап слежения за электрической частотой электроэнергетической системы включает слежение за частотой напряжения, подаваемого указанной электроэнергетической системой.
7. Компьютерный программный продукт, содержащий инструкции, которые при исполнении на по меньшей мере одном процессоре обуславливают выполнение способа по любому из пп. 1-6 по меньшей мере одним процессором.
8. Устройство для электрического соединения и отсоединения по меньшей мере одного заранее определенного блока нагрузки от электроэнергетической системы, при этом устройство содержит контроллер (405), выполненный с возможностью:
слежения за электрической частотой электроэнергетической системы,
слежения за параметром стабильности частоты, при этом указанный параметр стабильности частоты зависит от скорости изменения электрической частоты электроэнергетической системы и представляет собой время, оставшееся до того момента, когда частота упадет с измеренного значения до заранее определенного нижнего предела частоты, и
генерирования управляющего сигнала на отключение указанного по меньшей мере одного блока нагрузки от указанной электроэнергетической системы, когда указанная отслеживаемая частота меньше или равняется по меньшей мере одному заранее определенному пороговому значению частоты отключения и указанный определенный параметр стабильности частоты равняется или вышел за пределы по меньшей мере одного порогового значения параметра стабильности частоты.
9. Устройство по п. 8, отличающееся тем, что указанный контроллер (405) выполнен с возможностью генерирования управляющего сигнала на отключение по меньшей мере одной фидерной линии (500) нагрузки, когда отслеживаемая частота меньше или равняется заранее определенному пороговому значению частоты отключения (fthr,i) и указанный отслеживаемый параметр стабильности частоты равняется или вышел за пределы первого заранее определенного порогового значения параметра стабильности частоты (Mthr,i1), и генерирования управляющего сигнала на отключение по меньшей мере еще одной фидерной линии (500) нагрузки, когда отслеживаемая частота меньше или равняется указанному заранее определенному пороговому значению частоты отключения (fthr,i) и указанный отслеживаемый параметр стабильности частоты равняется или вышел за пределы второго заранее определенного порогового значения параметра стабильности частоты (Mthr,i2).
10. Устройство по п. 8 или 9, отличающееся тем, что указанный контроллер (405) дополнительно выполнен с возможностью определения электрической частоты электроэнергетической системы в момент времени t, с возможностью определения скорости изменения частоты в указанный момент времени t и с возможностью определения параметра стабильности частоты M(t) из указанной определенной частоты и скорости изменения частоты.
11. Устройство по любому из пп. 8-10, отличающееся тем, что указанный контроллер (405) дополнительно выполнен с возможностью определения параметра стабильности частоты M(t) путем применения следующего уравнения
,
где f(t) - это определенная частота указанной электроэнергетической системы в момент времени t, RoCoF(t) - это скорость изменения указанной частоты в момент времени t, а fLIM - это заранее определенный нижний предел частоты.
12. Устройство по любому из пп. 8-11, отличающееся тем, что указанный контроллер (405) дополнительно выполнен с возможностью приема значений по меньшей мере одного из указанного заранее определенного порогового значения частоты отключения, указанного заранее определенного порогового значения параметра стабильности частоты и указанного нижнего предела частоты от удаленного контроллера.
13. Устройство по любому из пп. 8-12, отличающееся тем, что указанный контроллер (405) дополнительно выполнен с возможностью слежения за частотой электроэнергетической системы путем определения частоты напряжения, подаваемого указанной электроэнергетической системой.
| МИКРОПРОЦЕССОРНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЧАСТОТНОЙ РАЗГРУЗКИ | 2002 |
|
RU2230414C2 |
| Способ автоматической частотной разгрузки энергосистем | 1983 |
|
SU1095305A1 |
| US 2013018521 A1, 17.01.2013 | |||
| US 6697244 B1, 24.02.2004 | |||
| Устройство запрета многоступенчатой автоматической частотной разгрузки (АЧР) энергосистемы | 1982 |
|
SU1072175A1 |

