Область техники
Настоящее изобретение относится к контроллеру для гибридной системы и, в частности, к контроллеру для управления гибридной системой, выполненной с возможностью генерирования приводного крутящего момента с помощью двигателя внутреннего сгорания и мотор-генератора.
Уровень техники
В последние годы были разработаны двигатели внутреннего сгорания, имеющие нагнетатель (который включает в себя все устройства индукции усилия, включающие в себя, например, турбонагнетатели). Некоторые нагнетатели используют энергию от выхлопного газа для наддува двигателя внутреннего сгорания для того, чтобы получать больший приводной крутящий момент. Такие двигатели внутреннего сгорания могут быть установлены, например, в транспортных средствах, строительных механизмах или т.п. Также быть раскрыты двигатели внутреннего сгорания с двумя нагнетателями, такими как первый нагнетатель и второй нагнетатель, или более (множеством) нагнетателями. Например, были раскрыты компоновки нагнетателей, в которых первый нагнетатель и второй нагнетатель размещаются последовательно, или первый нагнетатель и второй нагнетатель размещаются параллельно. Также описываются транспортные средства, строительные механизмы, и т.п., имеющие гибридную систему, которая формирует приводной крутящий момент посредством двигателя внутреннего сгорания и мотор-генератора.
Двигатель внутреннего сгорания с двумя относительно небольшими нагнетателями, размещенными последовательно или параллельно, имеет преимущество улучшенной реакции и способности получать крутящий момент от более низкого диапазона оборотов в минуту и т.д. над двигателем только с одним большим нагнетателем. Однако, с двигателем внутреннего сгорания с двумя нагнетателями, необходимо переключать наддув между (фактически) одним нагнетателем и двумя нагнетателями в ответ на режимы работы. Может возникать временное снижение наддува в течение переходного периода переключения с одного на два (или с двух на один) нагнетателя. Это снижение наддува может вызывать снижение крутящего момента. Снижение крутящего момента является нежелательным, поскольку оно происходит на уровне, который пользователь может ясно почувствовать, таким образом, предоставляя пользователю чувство дискомфорта. Следовательно, желательно уменьшать величину снижения крутящего момента во время переходного периода при переключении числа нагнетателей, которые должны быть использованы для регулирования наддува.
Например, в публикации выложенной заявки на патент Японии № 2010-190070 (JP 2010-190070) описан контроллер для системы двигателя внутреннего сгорания, сконфигурированный для управления двигателем внутреннего сгорания с первым нагнетателем и вторым нагнетателем, размещенными последовательно. Каждый цилиндр снабжается датчиком давления в цилиндре. Внутреннее давление цилиндров во время процесса выхлопа получается посредством этого датчика давления в цилиндре. Параметры, ассоциированные с колебаниями в давлении выхлопных газов, которые возникают в ответ на изменения в состоянии подачи выхлопных газов к первому и второму нагнетателям, получаются на основе полученного давления в цилиндре. На основе полученных параметров вычисляется уровень насосной потери. Это выполняется посредством вычисления насосной потери перед переключением нагнетателя (потери, ассоциированной с нагнетающим действием поршня для впуска и выпуска) и насосной потери в течение переходного периода переключения нагнетателя. Величина впрыска для корректировки крутящего момента вычисляется, и объем впрыска топлива увеличивается (для увеличения крутящего момента) на основе полученного уровня насосной потери. Это пресекает колебания в крутящем моменте, вызванные насосными потерями.
Однако, даже если величина крутящего момента увеличивается, чтобы компенсировать крутящий момент насосной потери, отрегулированный выходной крутящий момент будет недостаточным, чтобы компенсировать все потери крутящего момента. Дополнительно, в системе согласно JP 2010-190070 необходимо предоставлять датчик давления в цилиндре в каждом из цилиндров. Это увеличивает стоимость системы и требует значительных модификаций в цилиндрах (или головке блока цилиндров).
Следовательно, в гибридной системе, в которой приводной крутящий момент формируется посредством двигателя внутреннего сгорания и мотор-генератора, традиционно было желательным предусматривать контроллер для гибридной системы, который может правильно компенсировать потерянный крутящий момент, вызванный двигателем внутреннего сгорания, и дополнительно уменьшать снижение крутящего момента, которое вызывает дискомфорт у пользователя.
Сущность изобретения
Один вариант осуществления настоящего изобретения относится к контроллеру для гибридной системы, выполненному с возможностью управления гибридной системой, выполненной с возможностью генерирования приводного крутящего момента посредством двигателя внутреннего сгорания и мотор-генератора. Блок обнаружения рабочих условий контроллера обнаруживает рабочие условия двигателя внутреннего сгорания и мотор-генератора. Блок вычисления суммарного требуемого крутящего момента контроллера вычисляет суммарный требуемый крутящий момент на основе рабочих условий. Блок деления суммарного требуемого крутящего момента контроллера делит суммарный требуемый крутящий момент на требуемый крутящий момент двигателя внутреннего сгорания и требуемый крутящий момент мотора. Блок оценки суммарного момента потерь двигателя внутреннего сгорания контроллера оценивает суммарный момент потерь двигателя внутреннего сгорания, который является суммарной величиной потери на основе фактически сгенерированного приводного крутящего момента относительно целевого выходного крутящего момента двигателя внутреннего сгорания на основе требуемого крутящего момента двигателя внутреннего сгорания. Блок вычисления компенсационного крутящего момента мотора контроллера вычисляет компенсационный крутящий момент мотора, который должен быть компенсирован посредством мотор-генератора, на основе суммарного момента потерь двигателя внутреннего сгорания. Блок выполнения компенсации крутящего момента контроллера складывает требуемый крутящий момент мотора и компенсационный крутящий момент мотора, чтобы определять целевой выходной крутящий момент мотора, который должен быть сгенерирован посредством мотор-генератора.
Следовательно, суммарная потеря крутящего момента двигателя внутреннего сгорания компенсируется мотор-генератором с помощью компенсационного крутящего момента мотора. В то время как относительно трудно компенсировать суммарный момент потерь двигателя внутреннего сгорания посредством двигателя внутреннего сгорания, относительно легко компенсировать суммарный момент потерь двигателя внутреннего сгорания посредством мотор-генератора. Суммарный момент потерь двигателя внутреннего сгорания, генерируемый двигателем внутреннего сгорания, может, таким образом, быть правильно компенсирован посредством мотор-генератора, так что снижение крутящего момента, которое может причинять дискомфорт пользователю, может быть дополнительно уменьшено.
Согласно другому аспекту настоящего изобретения, двигатель внутреннего сгорания может включать в себя множество нагнетателей, и средство переключения нагнетателей, сконфигурированное, чтобы изменять число нагнетателей, которые должны быть использованы для регулирования наддува. Контроллер может включать в себя блок переключения нагнетателей, выполненный с возможностью управлять средством переключения нагнетателей на основе рабочих условий и изменять число нагнетателей, которые должны быть использованы для регулирования наддува. Блок оценки суммарного момента потерь двигателя внутреннего сгорания может оценивать суммарный момент потерь двигателя внутреннего сгорания, получающийся в результате снижения наддува в переходном периоде переключения. Переходный период переключения является периодом времени от состояния, в котором снижение наддува, возникшее непосредственно после изменения числа нагнетателей посредством управления средством переключения нагнетателей, до тех пор, пока целевое состояние наддува не будет достигнуто. Суммарный момент потерь двигателя внутреннего сгорания включает в себя момент потери при охлаждении, который теряется вследствие повышенной величины тепловой потери поршней и цилиндров двигателя внутреннего сгорания, вызванной снижением наддува.
Хотя величина снижения наддува может регулироваться до некоторой степени, возникновение снижения наддува является неизбежным в течение переходного периода переключения непосредственно после изменения числа нагнетателей для регулирования наддува. Вследствие этого снижения наддува в течение переходного периода переключения потери крутящего момента возникают в двигателе внутреннего сгорания. Различные эксперименты и моделирования показали, что потери крутящего момента вследствие снижения наддува в течение переходного периода переключения нагнетателей являются моментом потери (потеря) при охлаждении, моментом потери (потерей) вследствие неполного сгорания топлива, моментом (усиление) выхлопной потери и моментом (потеря) насосной потери. Среди них, также было обнаружено, что момент потери при охлаждении является преобладающим (с наибольшей долей). Согласно вышеописанному аспекту, суммарный момент потерь двигателя внутреннего сгорания более подходящей величины может быть оценен, поскольку суммарный момент потерь двигателя внутреннего сгорания включает в себя момент потери при охлаждении.
Согласно другому аспекту настоящего изобретения, суммарный момент потерь двигателя внутреннего сгорания вследствие снижения наддува, оцененный посредством контроллера, включает в себя момент потери из-за неполного сгорания топлива вследствие повышенного количества топлива, не полностью среагировавшего с воздухом в цилиндрах. Следовательно, представляется возможным оценивать более правильную величину суммарного момента потерь двигателя внутреннего сгорания.
Согласно другому аспекту настоящего изобретения, суммарный момент потерь двигателя внутреннего сгорания вследствие снижения наддува, оцененный посредством контроллера, включает в себя момент выхлопной потери, который усиливается на основе уменьшенной величины потери выхлопного газа на основе скорости потока выхлопного газа из цилиндров. Следовательно, представляется возможным оценивать более правильную величину суммарного момента потерь двигателя внутреннего сгорания.
Согласно другому аспекту настоящего изобретения, суммарный момент потерь двигателя внутреннего сгорания вследствие снижения наддува, оцененный посредством контроллера, включает в себя момент насосной потери, который теряется на основе повышенной величины насосной потери в соответствии с действием нагнетания на впуске и выпуске поршнем. Следовательно, представляется возможным оценивать более правильную величину суммарного момента потерь двигателя внутреннего сгорания.
Согласно другому аспекту настоящего изобретения, гибридная система может быть установлена в транспортном средстве. Целевой выходной крутящий момент двигателя внутреннего сгорания, генерируемый двигателем внутреннего сгорания, передается передним колесам транспортного средства. Целевой выходной крутящий момент мотора, генерируемый мотор-генератором, передается задним колесам транспортного средства. Гибридная система может быть надлежащим образом применена к такому транспортному средству.
Краткое описание чертежей
Фиг. 1 - иллюстративный вид примера системы двигателя внутреннего сгорания (системы двигателя внутреннего сгорания с двумя нагнетателями) в гибридной системе, имеющей двигатель внутреннего сгорания и мотор-генератор;
Фиг. 2 - иллюстративный вид примера транспортного средства, оборудованного гибридной системой, имеющей систему двигателя внутреннего сгорания и систему мотор-генератора (пример передачи приводного крутящего момента двигателя внутреннего сгорания и приводного крутящего момента мотор-генератора к задним колесам транспортного средства);
Фиг. 3 - схема, иллюстрирующая пример операций настоящего варианта осуществления для управления переключением с регулирования с помощью одного нагнетателя (с помощью только первого нагнетателя) на регулирование с помощью двух нагнетателей (с помощью первого и второго нагнетателей), снижения наддува, которое возникает в течение переходного периода переключения, и компенсации, которая происходит вследствие снижения наддува;
Фиг. 4 - схема, иллюстрирующая пример традиционной работы, в которой снижение крутящего момента, вызванное снижением наддува, не компенсируется;
Фиг. 5 - схема, иллюстрирующая суммарный момент потерь двигателя внутреннего сгорания;
Фиг. 6 - схема, иллюстрирующая момент потери вследствие неполного сгорания топлива и являющаяся примером карты момента потери вследствие неполного сгорания топлива для топлива, которое не полностью прореагировало с воздухом в цилиндре в среде низкого давления;
Фиг. 7 - схема, иллюстрирующая момент потери вследствие неполного сгорания топлива и являющаяся примером карты момента потери вследствие неполного сгорания топлива для топлива, которое не полностью прореагировало с воздухом в цилиндре в среде низкой температуры;
Фиг. 8 - блок-схема последовательности операций, иллюстрирующей пример процедуры обработки контроллера;
Фиг. 9 - блок-схема последовательности операций, иллюстрирующая подробности процесса SB000 (процесса переключения регулирования наддува) на этапе S030 блок-схемы последовательности операций, показанной на фиг. 8;
Фиг. 10 - блок-схема последовательности операций, иллюстрирующая пример процедуры обработки (процесса впрыска топлива) контроллера;
Фиг. 11 - блок-схема последовательности операций, иллюстрирующая пример процедуры обработки (процесса управления мотор-генератором) контроллера; и
Фиг. 12 - иллюстративный вид примера транспортного средства, в котором приводной крутящий момент для двигателя внутреннего сгорания передается передним колесам транспортного средства, а приводной крутящий момент мотор-генератора передается задним колесам транспортного средства, в отличие от примера транспортного средства, оборудованного гибридной системой, показанной на фиг. 2 (которая является примером передачи приводного крутящего момента двигателя внутреннего сгорания и приводного крутящего момента мотор-генератора задним колесам транспортного средства).
Подробное описание изобретения
Далее в данном документе будет описан пример конструкции системы 2 двигателя внутреннего сгорания (фиг. 1).
Так, вариант осуществления для выполнения настоящего изобретения будет описан со ссылкой на чертежи. Фиг. 1 показывает пример конструкции системы 2 двигателя внутреннего сгорания. Транспортное средство может быть оборудовано гибридной системой 1, имеющей систему 2 двигателя внутреннего сгорания и систему 3 мотор-генератора (см. фиг. 2). В качестве примера двигателя внутреннего сгорания будет описан двигатель 10 внутреннего сгорания (например, дизельный двигатель), установленный в транспортном средстве. Пример системы 2 двигателя внутреннего сгорания, показанный на фиг. 2, имеет два нагнетателя, включающих в себя первый нагнетатель 31 и второй нагнетатель 32, размещенные параллельно. Однако, второй нагнетатель 32 и первый нагнетатель 31 могут также выполнять операцию наддува последовательно, например, с помощью впускной обводной трубы 11CB и впускного обводного клапана 61.
Далее в данном документе будет описана система 2 двигателя внутреннего сгорания, в порядке от впускной стороны (верхняя часть на фиг. 1) к выпускной стороне (нижняя часть на фиг. 1), с помощью фиг. 1. На впускной стороне впускной трубы 11A могут быть предусмотрены средство 21 обнаружения расхода всасываемого воздуха (например, датчик расхода всасываемого воздуха), средство 22D обнаружения атмосферного давления (например, датчик давления) и средство 22E обнаружения температуры всасываемого воздуха (например, датчик температуры). Средство 21 обнаружения расхода всасываемого воздуха выводит сигнал в соответствии с расходом воздуха, всасываемого двигателем 10 внутреннего сгорания, в контроллер 70. Средство 22D обнаружения атмосферного давления выводит сигнал в соответствии с давлением атмосферы, в контроллер 70, в то время как средство 22E обнаружения температуры всасываемого воздуха выводит сигнал в соответствии с температурой воздуха, всасываемого двигателем 10 внутреннего сгорания (температурой окружающего воздуха), в контроллер 70. Выпускная сторона впускной трубы 11A разветвляется на две впускные трубы 11B1, 11B2. Выпускная сторона впускной трубы 11A соединяется с впускными сторонами впускных труб 11B1, 11B2.
Выпускная сторона впускной трубы 11B1 соединяется с впускной стороной компрессора 31A для первого нагнетателя 31 (первого турбонагнетателя). Выпускная сторона впускной обходной трубы 11CB соединяется со средним участком впускной трубы 11B1. Выпускная сторона компрессора 31A соединяется с впускной стороной впускной трубы 11C1. Выпускная сторона впускной трубы 11C1 соединяется с выпускной стороной впускной трубы 11C2 и соединяется с впускной стороной впускной трубы 11D. Компрессор 31A приводится во вращение посредством турбины 31B, так что воздух, всасываемый через впускную трубу 11B1, сжимается и выпускается (нагнетается) во впускную трубу 11C1.
Выпускная сторона впускной трубы 11B2 соединяется с впускной стороной компрессора 32A для второго нагнетателя 32 (второго турбонагнетателя). Выпускная сторона компрессора 32A разветвляется на впускную трубу 11C2 и впускную обводную трубу 11CB. Первая выпускная сторона компрессора 32A соединяется с впускной стороной впускной трубы 11C2. Вторая выпускная сторона компрессора 32A соединяется с впускной стороной впускной обходной трубы 11CB. Выпускная сторона впускной трубы 11C2 соединяется с выпускной стороной впускной трубы 11C1 и соединяется с впускной стороной впускной трубы 11D. Впускная труба 11C2 снабжается клапаном 62 переключения всасываемого воздуха, сконфигурированным, чтобы открывать и закрывать впускную трубу 11C2 в ответ на управляющий сигнал от контроллера 70. Выпускная сторона впускной обводной трубы 11CB соединяется с впускной трубой 11B1. Впускная обводная труба 11CB снабжается впускным обводным клапаном 61, сконфигурированным, чтобы открывать и закрывать впускную обводную трубу 11CB в ответ на управляющий сигнал от контроллера 70.
Турбина 32B для вращательного привода компрессора 32A приводится во вращение посредством энергии выхлопных газов, если клапан 63 переключения выхлопного газа является открытым. Клапан 63 переключения выхлопного газа открывает и закрывает выхлопную трубу 12B2 в ответ на управляющий сигнал от контроллера 70. Контроллер 70 открывает один из клапана 62 переключения всасываемого воздуха или впускного обводного клапана 61 и закрывает другой, когда турбина 32B приводится во вращение, в то время как клапан 63 переключения выхлопного газа является открытым. Контроллер 70 закрывает клапан 62 переключения всасываемого воздуха и впускной обводной клапан 61, когда клапан 63 переключения выхлопного газа является закрытым.
Компрессор 32A сжимает воздух, всасываемый через впускную трубу 11B2, и выпускает (нагнетает) его во впускную трубу 11C2, когда компрессор 32A приводится во вращение посредством турбины 32B с открытым клапаном 62 переключения всасываемого воздуха и закрытым впускным обводным клапаном 61. С другой стороны, компрессор 32A сжимает воздух, всасываемый через впускную трубу 11B2, и выпускает (нагнетает) его во впускную обводную трубу 11CB, когда компрессор 32A приводится во вращение посредством турбины 32B с закрытым клапаном 62 переключения всасываемого воздуха и открытым впускным обводным клапаном 61.
Впускная сторона впускной трубы 11D соединяется с выпускной стороной впускной трубы 11C1 и выпускной стороной впускной трубы 11C2. Выпускная сторона впускной трубы 11D соединяется с выпускной стороной впускного коллектора 11E. Впускной коллектор 11E снабжается средством 22A обнаружения впускного коллектора (например, датчиком давления) для обнаружения давления наддува во впускном коллекторе 11E и средством 28A обнаружения впускного коллектора (например, датчиком температуры) для обнаружения температуры всасываемого воздуха во впускном коллекторе 11E. Средство 22A обнаружения впускного коллектора выводит сигнал в соответствии с давлением всасываемого воздуха (нагнетаемого всасываемого воздуха) во впускном коллекторе 11E в контроллер 70. Средство 28A обнаружения впускного коллектора выводит сигнал в соответствии с температурой всасываемого воздуха во впускном коллекторе 11E в контроллер 70.
Выпускная сторона впускного коллектора 11E соединяется с соответствующими цилиндрами двигателя 10 внутреннего сгорания.
Двигатель 10 внутреннего сгорания включает в себя множество цилиндров, и цилиндры снабжаются инжекторами 43A-43H, соответственно. Топливо подается из аккумуляторной системы 42 подачи топлива высокого давления, через топливный трубопровод, к инжекторам 43A-43H. Инжекторы 43A-43H приводятся в действие в соответствии с управляющим сигналом от контроллера 70, чтобы впрыскивать топливо в каждый из цилиндров.
Топливо подается в аккумуляторную систему 42 подачи топлива высокого давления от регулирующего давление топлива насоса 41, который приводится в действие в соответствии с управляющим сигналом от контроллера 70. Аккумуляторная система 42 подачи топлива высокого давления снабжается средством 23 обнаружения давления топлива (например, датчиком давления) для обнаружения давления топлива в аккумуляторной системе 42 подачи топлива высокого давления. Средство 23 обнаружения давления топлива выводит сигнал в соответствии с обнаруженным давлением топлива в контроллер 70. Контроллер 70 служит для управления регулирующим давление топлива насосом 41, так что давление топлива на основе обнаруженного сигнала от средства 23 обнаружения давления топлива становится целевым давлением топлива.
Двигатель 10 внутреннего сгорания снабжается средством 25 обнаружения вращения (например, датчиком вращения), средством 24 обнаружения температуры охлаждающей жидкости (например, датчиком температуры), и т.п. Средство 25 обнаружения вращения конфигурируется, чтобы выводить сигнал в соответствии со скоростью вращения коленчатого вала двигателя 10 внутреннего сгорания (т.е., скоростью двигателя) в контроллер 70. Средство 24 обнаружения температуры охлаждающей жидкости конфигурируется, чтобы обнаруживать температуру охлаждающей жидкости, циркулирующей в двигателе внутреннего сгорания, и выводить сигнал в соответствии с обнаруженной температурой в контроллер 70.
Выпускные стороны выпускных коллекторов 12A1, 12A2 соединяются с выхлопной стороной двигателя 10 внутреннего сгорания. Впускная сторона выхлопной трубы 12B1 соединяется с выпускной стороной выпускного коллектора 12A1. Впускная сторона выхлопной трубы 12B2 соединяется с выпускной стороной выпускного коллектора 12A2. Выпускная сторона выхлопной трубы 12B1 соединяется с впускной стороной турбины 31B для первого нагнетателя 31. Выпускная сторона выхлопной трубы 12B2 соединяется с впускной стороной турбины 32B для второго нагнетателя 32. Выхлопная труба 12B2 снабжается клапаном 63 переключения выхлопного газа, который открывает и закрывает выхлопную трубу 12B2 в ответ на управляющий сигнал от контроллера 70. Выхлопная обводная труба 12BB, которая ведет выхлопной газ в выхлопной трубе 12B2 в выхлопную трубу 12B1, когда клапан 63 переключения выхлопного газа является закрытым, соединяется с выхлопной трубой 12B1 и выхлопной трубой 12B2.
Впускная сторона выхлопной трубы 12C1 соединяется с выпускной стороной турбины 31B для первого нагнетателя 31, а выпускная сторона выхлопной трубы 12C1 (выхлопной трубы 12D ниже по потоку от места соединения с выхлопной трубой 12C2) соединяется с впускной стороной каталитического нейтрализатора 51. Впускная сторона выхлопной трубы 12C2 соединяется с выпускной стороной турбины 32B для второго нагнетателя 32, а выпускная сторона выхлопной трубы 12C2 соединяется с серединой выхлопной трубы 12C1. Выхлопная труба 12C1 снабжается средством 22B обнаружения давления выхлопного газа (например, датчиком давления), чтобы обнаруживать давление выхлопного газа в выхлопной трубе 12C1, средством 26 обнаружения температуры выхлопного газа (например, датчика температуры), чтобы обнаруживать температуру выхлопных газов в выхлопной трубе 12C1. Средство 22B обнаружения давления выхлопного газа выводит сигнал в соответствии с обнаруженным давлением в контроллер 70. Средство 26 обнаружения температуры выхлопного газа выводит сигнал в соответствии с обнаруженной температурой в контроллер 70.
Турбина 31B для первого нагнетателя 31 снабжается регулируемым соплом 31C, приспособленным для регулирования скорости потока выхлопного газа, который вынуждает турбину 31B приводиться во вращение. Регулируемое сопло 31C приводится в действие средством 31D приведения в действие сопла (например, электромотором), которое срабатывает в ответ на управляющий сигнал от контроллера 70. Средство 31E обнаружения открытия сопла (например, датчик угла поворота) выводит сигнал в контроллер 70 в соответствии с рабочим условием средства 31D приведения в действие сопла (в этом случае, углом поворота электромотора) на основе открытия регулируемого сопла 31C. Контроллер 70 служит для управления средством 31D приведения в действие сопла, так что степень открытия регулируемого сопла 31C, полученная на основе обнаруженного сигнала от средства 31E обнаружения открытия сопла, будет целевой величиной открытия сопла. Аналогично, второй нагнетатель 32 может включать в себя регулируемое сопло 32C для турбины 32B, средство 32D приведения в действие сопла и средство 32E обнаружения открытия сопла.
Выпускная сторона каталитического нейтрализатора 51 соединяется с впускной стороной DPF (сажевого фильтра) 52 (например, тонкодисперсный улавливающий фильтр). Каталитический нейтрализатор 51 окисляет и очищает HC (углеводороды) и CO (моноксид углерода) в выхлопном газе двигателя 10 внутреннего сгорания.
Выпускная сторона DPF 52 соединяется с впускной стороной мочевинного SCR 53. DPF 52 улавливает мелкие частицы в выхлопном газе. DPF 52 снабжается средством 22C обнаружения дифференциального давления (например, датчиком дифференциального давления), сконфигурированным, чтобы обнаруживать перепад давления между впускной и выпускной сторонами DPF 52. Средство 22C обнаружения дифференциального давления выводит сигнал в соответствии с перепадом давления между впускной и выпускной сторонами DPF 52 в контроллер 70. Контроллер 70 может оценивать количество мелких частиц, осевших на DPF 52, из дифференциального давления на основе обнаруженного сигнала от средства 22C обнаружения дифференциального давления.
Мочевинный SCR 53 использует мочевину, впрыскиваемую из клапана добавления мочевинной воды (не показан), чтобы уменьшать и очищать NOx (оксиды азота) в выхлопном газе.
Средство 27 обнаружения величины нажатия педали акселератора (например, датчик угла нажатия педали акселератора) предусматривается на педали акселератора. Средство 27 обнаружения величины нажатия педали акселератора выводит сигнал в соответствии с величиной нажатия на акселератор водителем в контроллер 70.
Контроллер 70 включает в себя CPU 71 (ЦП), RAM 72 (ОЗУ), средство 73 памяти, EEPROM 74 (ЭСППЗУ), таймер 75 и т.д. RAM 72, средство 73 памяти, EEPROM 74, таймер 75 и т.д. соединяются с CPU 71 через различные шины. Средство 73 памяти может быть, например, запоминающим устройством, таким как Flash ROM (флэш-ПЗУ), и может хранить программы, данные и т.п. для выполнения процессов, описанных ниже. CPU 71 включает в себя блок 71A обнаружения рабочих условий, блок 71B вычисления суммарного требуемого крутящего момента, блок 71C деления суммарного требуемого крутящего момента, блок 71D оценки суммарного момента потерь двигателя внутреннего сгорания, блок 71E вычисления компенсационного крутящего момента мотора, блок 71F выполнения компенсации крутящего момента, блок 71G переключения нагнетателей и т.п. Подробности различных частей CPU 71 будут описаны позже.
Как показано на фиг. 2, контроллер 70 выводит управляющие сигналы для управления сцеплением и расцеплением первой муфты 15A сцепления и второй муфты 15B сцепления. Контроллер 70 конфигурируется, чтобы обнаруживать условие работы мотор-генератора 80, инвертора 81 и аккумуляторной батареи 82. Контроллер 70 выводит управляющие сигналы мотор-генератору 80, инвертору 81 и аккумуляторной батарее 82.
Транспортное средство, оборудованное гибридной системой 1, имеющей систему 2 двигателя внутреннего сгорания и систему 3 мотор-генератора (фиг. 2)
Как показано на фиг. 2, транспортное средство, описанное в настоящем варианте осуществления, оборудуется гибридной системой 1, выполненной с возможностью генерирования приводного крутящего момента посредством системы 2 двигателя внутреннего сгорания, имеющей двигатель 10 внутреннего сгорания (см. фиг. 1), и системы 3 мотор-генератора, имеющей мотор-генератор 80. Транспортное средство, показанное на фиг. 2, имеет ведущие колеса RR, RL, ведомые колеса FR, FL, дифференциал 17, трансмиссию 16, вторую муфту 15B сцепления, мотор-генератор 80, первую муфту 15A сцепления, двигатель 10 внутреннего сгорания, контроллер 70, инвертор 81, аккумуляторную батарею 82 и т.д. Контроллер 70 приспособлен для обнаружения скорости вращения двигателя 10 внутреннего сгорания на основе обнаруженного сигнала от средства 25 обнаружения вращения. Контроллер 70 приспособлен для обнаружения скорости вращения мотор-генератора 80 на основе обнаруженного сигнала от средства 80A обнаружения вращения. Контроллер 70 приспособлен для обнаружения скорости вращения входного вала трансмиссии 16 на основе обнаруженного сигнала от средства 16A обнаружения вращения. Контроллер 70 может переключать первую муфту 15A сцепления и вторую муфту 15B сцепления между зацепленным состоянием, расцепленным состоянием и полузацепленным состоянием (состоянием проскальзывания).
Когда приводной крутящий момент формируется посредством мотор-генератора 80, мощность, выводимая из аккумуляторной батареи 82, преобразуется в приводную мощность мотора посредством инвертора 81, чтобы приводить в действие мотор-генератор 80. Когда мотор-генератор 80 работает в рекуперативном режиме, мощность, генерируемая посредством мотор-генератора 80, преобразуется в зарядную мощность посредством инвертора 81, которая заряжает аккумуляторную батарею 82.
Хотя не показано на чертежах, мотор-генератор 80, инвертор 81 и аккумуляторная батарея 82 снабжаются различными средствами обнаружения, приспособленными для обнаружения их соответствующих рабочих условий. Контроллер 70 может обнаруживать условия работы мотор-генератора 80, инвертора 81 и аккумуляторной батареи 82. Хотя не показано, мотор-генератор 80, инвертор 81 и аккумуляторная батарея 82 снабжаются различными актуаторами и управляющими схемами. Контроллер 70 может управлять операциями мотор-генератора 80, инвертора 81 и аккумуляторной батареи 82. Другими словами, контроллер 70 управляет двигателем 10 внутреннего сгорания, мотор-генератором 80, инвертором 81, аккумуляторной батареей 82, первой муфтой 15A сцепления и второй муфтой 15B сцепления на основе рабочих условий двигателя 10 внутреннего сгорания, мотор-генератора 80, инвертора 81 и аккумуляторной батареи 82.
Например, когда приводной крутящий момент, который должен быть передан ведущим колесам RR, RL, формируется только посредством двигателя 10 внутреннего сгорания, контроллер 70 управляет двигателем 10 внутреннего сгорания, чтобы формировать приводной крутящий момент. Контроллер 70 управляет первой муфтой 15A сцепления и второй муфтой 15B сцепления, чтобы они были в зацепленном состоянии. Контроллер 70 управляет инвертором 81 так, что приводной крутящий момент не формируется посредством мотор-генератора 80. С другой стороны, когда приводной крутящий момент, который должен быть передан к ведущим колесам RR, RL, формируется посредством двигателя 10 внутреннего сгорания и мотор-генератора 80, контроллер 70 управляет двигателем 10 внутреннего сгорания, чтобы формировать приводной крутящий момент. Контроллер 70 управляет первой муфтой 15A сцепления и второй муфтой 15B сцепления, чтобы они были в зацепленном состоянии. Контроллер 70 управляет инвертором 81 так, что приводной крутящий момент также формируется посредством мотор-генератора 80. С другой стороны, когда приводной крутящий момент, который должен быть передан ведущим колесам RR, RL, формируется только посредством мотор-генератора 80, контроллер 70 останавливает двигатель 10 внутреннего сгорания и управляет первой муфтой 15A сцепления, чтобы она была в разомкнутом состоянии. Контроллер 70 управляет второй муфтой 15B сцепления, чтобы она была в зацепленном состоянии. Контроллер 70 управляет инвертором 81 так, что приводной крутящий момент формируется посредством мотор-генератора 80.
Пример переключения регулирования наддува и снижения в давлении наддува и крутящем моменте в течение переходного периода переключения (фиг. 3-7)
Фиг. 3 показывает пример переключения регулирования наддува с одного турбонагнетателя (наддува с помощью только первого нагнетателя 31 (см. фиг. 1)) на два турбонагнетателя (наддув с помощью первого нагнетателя 31 и второго нагнетателя 32 (см. фиг. 1)). Пример, показанный на фиг. 3, показывает, что регулирование наддува выполняется с помощью одного турбонагнетателя до времени Ta. Условия переключения с одного на два турбонагнетателя устанавливаются во время Ta. Регулирование наддува затем выполняется с помощью двух турбонагнетателей после времени Tb. Время со времени Ta до Tb является временем переключения, когда система переключается с одного турбонагнетателя на два. Фиг. 3 иллюстрирует действие настоящего варианта осуществления, в котором мотор-генератор компенсирует снижение крутящего момента при переключении с одного турбонагнетателя на два. Фиг. 4 является схемой, иллюстрирующей традиционную работу без компенсации посредством мотор-генератора. Фиг. 5 - это схема, иллюстрирующая суммарный момент потерь двигателя внутреннего сгорания, который вызывает снижение крутящего момента при переключении с одного турбонагнетателя на два турбонагнетателя.
Как показано на фиг. 3, до времени Ta, контроллер 70 определяет, что регулирование наддува должно выполняться с помощью одного турбонагнетателя. Как показано на фиг. 1 и 3, в этом случае, контроллер 70 закрывает впускной обводной клапан 61, клапан 62 переключения всасываемого воздуха и клапан 63 переключения выхлопного газа. В результате, выхлопной газ не протекает в турбину 32B второго нагнетателя 32. Следовательно, второй нагнетатель 32 не выполняет наддув, но наддув выполняется только посредством первого нагнетателя 31.
Как показано на фиг. 3, во время Ta, контроллер 70 определяет, что условия переключения для переключения с регулирования наддува с помощью одного турбонагнетателя на регулирование наддува с помощью двух турбонагнетателей были удовлетворены. Как показано на фиг. 1 и 3, в этом случае, контроллер 70 временно соединяет второй нагнетатель 32 и первый нагнетатель 31 последовательно для того, чтобы уменьшать или предотвращать снижение наддува. В этом случае, контроллер 70 открывает впускной обводной клапан 61, закрывает клапан 62 переключения всасываемого воздуха и открывает клапан 63 переключения выхлопного газа. Со времени Ta до того как время переключения пройдет (до того как время Tb будет достигнуто), это состояние сохраняется, и второй нагнетатель 32 и первый нагнетатель 31 являются соединенными последовательно, таким образом, чтобы предоставлять возможность второму нагнетателю 32 и первому нагнетателю 31 выполнять наддув.
Как показано на фиг. 3, после того как время Tb было достигнуто, т.е., когда время переключения прошло со времени Ta, контроллер 70 определяет, что регулирование наддува должно выполняться с помощью двух турбонагнетателей. Обращаясь к фиг. 1 и 3, в этом случае, контроллер 70 закрывает впускной обводной клапан 61, открывает клапан 62 переключения всасываемого воздуха и открывает клапан 63 переключения выхлопного газа. В этом случае, контроллер 70 использует первый нагнетатель 31 и второй нагнетатель 32 параллельно, таким образом, чтобы предоставлять возможность второму нагнетателю 32 и первому нагнетателю 31 выполнять наддув.
Как показано на фиг. 3, время Ta, время Tb и время Tc проходят в таком порядке. Время со времени Ta до времени Tc является временем переходного состояния. Во время Ta переключение с одного турбонагнетателя на два турбонагнетателя начинается. Во время Tb переключение на два турбонагнетателя завершается. Время дополнительно проходит со времени Tb и достигает времени Tc. В течение времени переходного состояния (соответствующего переходному периоду переключения) скорость вращения турбины второго нагнетателя еще недостаточно увеличивается, тем самым, вызывая возникновение снижения в давлении наддува. С этим снижением в давлении наддува выходной крутящий момент двигателя 10 внутреннего сгорания будет также снижен. В то время как пользователь почти никогда не почувствует снижение в давлении наддува, он/она почувствует снижение в выходном крутящем моменте, поскольку это вынуждает транспортное средство дергаться. Как будет описано ниже, с помощью процесса контроллера, описанного в настоящем варианте осуществления, это снижение в выходном крутящем моменте будет уменьшено до уровня, который пользователь не может легко почувствовать.
Как показано посредством раздела "давление наддува" на фиг. 3, снижение в давлении наддува возникает во время переходного состояния, время между временем Ta и временем Tc. Следовательно, хотя раздел "целевого выходного крутящего момента двигателя внутреннего сгорания", показанный на фиг. 3, который является целевым приводным крутящим моментом, генерируемым посредством двигателя внутреннего сгорания, является постоянным между временем Ta и временем Tc, в реальности, снижение крутящего момента будет возникать, как показано в качестве раздела "приводной крутящий момент, фактически генерируемый посредством двигателя внутреннего сгорания", показанного на фиг. 3, вследствие снижения в давлении наддува. Времена Td и Te, показанные на фиг. 3, являются временем между временем Ta и временем Tc, которое является временем состояния переключения с 1 турбонагнетателя на 2 турбонагнетателя. Время Td является временем, в которое приводной крутящий момент, фактически сгенерированный в двигателе 10 внутреннего сгорания, начинает снижаться. Время Te является временем, в которое снижение в приводном крутящем моменте, фактически сгенерированном в двигателе 10 внутреннего сгорания, заканчивается.
Далее в данном документе снижение крутящего момента, которое показано снижением в разделе "приводной крутящий момент, фактически сгенерированный в двигателе внутреннего сгорания", показанном на фиг. 3, будет называться суммарным моментом ДTQ потерь двигателя внутреннего сгорания. Снижение выходного крутящего момента в этом случае возникает, поскольку крутящий момент двигателя внутреннего сгорания является более низким вследствие снижения в давлении наддува, но не компенсируется генерированием крутящего момента посредством мотор-генератора. Следовательно, ДTQ называется "суммарным моментом потерь двигателя внутреннего сгорания". В настоящем варианте осуществления, как будет описано позже, суммарный момент ДTQ потерь двигателя внутреннего сгорания компенсируется посредством мотор-генератора. Более конкретно, "компенсационный крутящий момент мотора" (см. фиг. 3) определяется, и затем получается "целевой выходной крутящий момент мотора, полученный сложением компенсационного крутящего момента мотора с требуемым крутящим моментом мотора" (см. фиг. 3). Мотор-генератор затем управляется, чтобы добиваться определенного целевого выходного крутящего момента мотора. В результате, как показано в нижней части на фиг. 3, снижение (ДQ) приводного крутящего момента, фактически генерируемого посредством двигателя внутреннего сгорания и мотор-генератора, относительно суммарного требуемого крутящего момента (суммарной величины требуемого крутящего момента) дополнительно уменьшается. В отличие от этого, фиг. 4 показывает традиционную работу, в которой компенсационный момент мотора для компенсации суммарного момента потерь двигателя внутреннего сгорания не определяется. Следовательно, снижение (ДQz) приводного крутящего момента, фактически генерируемого посредством двигателя внутреннего сгорания и мотор-генератора, является значительно большим относительно суммарного требуемого крутящего момента (суммарной величины требуемого крутящего момента), как показано в нижней части на фиг. 4. В результате, пользователь может почувствовать снижение крутящего момента.
Изобретатели провели многочисленные эксперименты и моделирования и проанализировали факторы, чтобы определять суммарный момент ДTQ потерь двигателя внутреннего сгорания. Изобретатели затем обнаружили, что суммарный момент ДTQ потерь двигателя внутреннего сгорания является суммой момента потери при охлаждении, момента выхлопной потери, момента насосной потери и момента потери вследствие неполного сгорания топлива, как показано на фиг. 5. Как может быть видно на фиг. 5, момент потери при охлаждении является преобладающим в (значительно большая доля) суммарном моменте ДTQ потерь двигателя внутреннего сгорания.
Момент потери при охлаждении является крутящим моментом, который теряется вследствие количества тепла (тепловой потери), отбираемого от цилиндров и поршней. Это может происходить, когда топливо, впрыснутое в цилиндры, ударяется о цилиндры и поршни, прежде чем полностью распыляется, когда давление наддува повышается. Впрыснутое топливо может отбирать тепло от цилиндров и поршней. Способ вычисления момента потери при охлаждении может быть основан на температуре охлаждающей жидкости и давлении наддува. Эта потеря может быть определена посредством получения и анализа различных экспериментальных данных, касающихся фактической температуры хладагента и давления наддува двигателя внутреннего сгорания. Более конкретно, увеличение в моменте потери при охлаждении может быть определено вычитанием момента потери при охлаждении перед переключением регулирования наддува из момента потери при охлаждении во время переходного состояния. Контроллер может оценивать момент тепловой потери, который теряется, вследствие тепловой потери на поршни и цилиндры двигателя внутреннего сгорания, на основе увеличенной величины тепловой потери, вызванной снижением наддува.
Момент выхлопной потери является крутящим моментом, который "усиливается" посредством уменьшения давления выхлопного газа, получающегося в результате снижения давления наддува. Характеристики потери давления для потери давления выхлопного газа в значительной степени определяются посредством аппаратных средств, например, которые показаны на фиг. 1, через которые выхлопной газ проходит, от каталитического нейтрализатора 51 до момента, когда он выпускается в атмосферу. Давление выхлопного газа в выпускном коллекторе 12A1 двигателя 10 внутреннего сгорания может быть определено из атмосферного давления, обнаруженного средством 22D обнаружения атмосферного давления, характеристик потери давления, описанных выше, дифференциального давления, обнаруженного средством 22C обнаружения дифференциального давления, и открытия регулируемого сопла 31C. Дополнительно, момент выхлопной потери может быть определен из давления выхлопного газа в выпускном коллекторе 12A1 двигателя 10 внутреннего сгорания. Более конкретно, величина момента выхлопной потери, которая была уменьшена, может быть определена вычитанием момента выхлопной потери перед переключением регулирования наддува из момента выхлопной потери во время переходного периода. Как будет описано позже, в потере выхлопного газа на основе скорости потока выхлопного газа из цилиндров двигателей внутреннего сгорания, контроллер может оценивать момент выхлопной потери, усиленный на основе уменьшенной величины потери выхлопного газа, получающейся в результате снижения наддува.
Момент насосной потери является потерей крутящего момента, определенной с помощью давления на впускной стороне, давления на выпускной стороне и площади верхней поверхности поршня. Это определение выполняется, когда поршень выполняет действие нагнетания, в котором поршень втягивает всасываемый воздух из впускного коллектора и подает выхлопной газ под давлением в выпускной коллектор. Поскольку величина силы всасывания увеличивается, когда давление наддува снижается, насосная потеря увеличивается, когда давление наддува снижается. Другими словами, величина увеличения момента насосной потери может быть определена вычитанием момента насосной потери перед переключением регулирования наддува из момента насосной потери во время переходного состояния. Как будет описано позже, с помощью насосной потери на основе действия нагнетания для впуска и выхлопа посредством поршня двигателя внутреннего сгорания, контроллер может оценивать момент насосной потери, усиленный на основе увеличенной величины насосной потери, получающейся в результате снижения наддува.
Момент потери вследствие неполного сгорания топлива, который является потерей вследствие части топлива, впрыснутой в цилиндры. Более конкретно, он является частью, которая не полностью прореагировала с воздухом (несгоревшее топливо) в средах низкого давления или низкой температуры. Например, момент потери вследствие неполного сгорания топлива зависит от скорости вращения и объема впрыска для двигателя внутреннего сгорания. Характеристика момента потери вследствие неполного сгорания топлива подготавливается для каждого уровня давления во впускном коллекторе. Таким образом, момент потери вследствие неполного сгорания топлива (среда низкого давления) в среде низкого давления может быть определен (оценен).
Например, как показано на фиг. 6, момент потери вследствие неполного сгорания топлива зависит от характеристик скорости (N*) вращения и объема (Q*) впрыска для двигателя внутреннего сгорания. Характеристика момента потери вследствие неполного сгорания топлива (среда низкого давления) подготавливается для каждого из давлений наддува (a1, a2, a3, a4 и т.д.) во впускном коллекторе и сохраняется в запоминающем средстве. Контроллер определяет (оценивает) момент потери вследствие неполного сгорания топлива (среда низкого давления) из характеристик момента потери вследствие неполного сгорания топлива и рабочих условий двигателя внутреннего сгорания. Рабочие условия двигателя внутреннего сгорания могут быть, например, скоростью вращения, объемом впрыска для двигателя внутреннего сгорания и давлением наддува во впускном коллекторе.
Например, как показано на фиг. 7, характеристика момента (E*) потери вследствие неполного сгорания топлива зависит от скорости (N*) вращения и объема (Q*) впрыска для двигателя внутреннего сгорания. Характеристика момента потери вследствие неполного сгорания топлива (среда низкой температуры) подготавливается для каждой температуры (t1, t2, t3, t4 и т.д.) во впускном коллекторе и сохраняется в запоминающем средстве. Контроллер может определять (оценивать) момент потери вследствие неполного сгорания топлива (среда низкой температуры) из момента потери вследствие неполного сгорания топлива (среда низкой температуры) и рабочих условий двигателя внутреннего сгорания. Рабочие условия двигателя внутреннего сгорания могут быть, например, скоростью вращения, объемом впрыска для двигателя внутреннего сгорания и температурой во впускном коллекторе. Контроллер может затем определять (оценивать) момент потери вследствие неполного сгорания топлива, например, складывая момент потери вследствие неполного сгорания топлива (среда низкого давления) и момент потери вследствие неполного сгорания топлива (среда низкой температуры).
Процедуры обработки контроллера 70 (фиг. 8-11)
Далее в данном документе примеры процедур обработки контроллера 70 (CPU 71) будут описаны со ссылкой на блок-схемы последовательности операций, показанные на фиг. 8-11. Процесс, показанный на фиг. 8, начинается, например, с предварительно определенными интервалами времени (например, с интервалами от нескольких [мс] до нескольких десятков [мс] миллисекунд). Контроллер 70 (CPU 71) переходит к этапу S010.
На следующем этапе S010 контроллер 70 получает и сохраняет физические величины на основе обнаруженных сигналов от различных средств обнаружения и продвигает процесс к следующему этапу S015 для обработки входного сигнала. Например, контроллер 70 получает текущий расход всасываемого воздуха, температуру всасываемого воздуха (окружающую температуру), давление всасываемого воздуха (атмосферное давление), давление наддува во впускном коллекторе, температуру во впускном коллекторе, температуру охлаждающей жидкости, скорость вращения двигателя внутреннего сгорания, давление топлива, объем впрыскиваемого топлива, временной интервал впрыска, давление выхлопного газа, температуру выхлопного газа, величину открытия регулируемого сопла первого нагнетателя, величину открытия регулируемого сопла второго нагнетателя, дифференциальное давление DPF, величину нажатия педали акселератора, состояние аккумуляторной батареи, состояние инвертора, состояние мотор-генератора и т.д. Контроллер 70 соответственно сохраняет их в качестве текущего расхода всасываемого воздуха, текущей температуры окружающего воздуха, текущего атмосферного давления, текущего давления наддува во впускном коллекторе, текущей температуры во впускном коллекторе, текущей температуры охлаждающей жидкости, текущей скорости вращения двигателя внутреннего сгорания, текущего давления топлива, текущего объема топлива, текущего временного интервала впрыска, текущего давления выхлопного газа, текущей температуры выхлопного газа, текущей величины открытия первого сопла, текущей величины открытия второго сопла, текущего дифференциального давления, текущей величины нажатия педали акселератора, текущего состояния аккумуляторной батареи, текущего состояния инвертора, текущего состояния мотор-генератора и т.д. Физические величины, которые должны быть сохранены в памяти контроллера 70, не должны ограничиваться этими величинами.
Контроллер 70 (CPU 71) включает в себя блок 71A обнаружения рабочих условий, который выполняет обработку на этапе S010. Блок 71A обнаружения рабочих условий служит для обнаружения рабочих условий двигателя внутреннего сгорания и мотор-генератора (также как аккумуляторной батареи и инвертора).
На этапе S015 контроллер 70 вычисляет суммарный требуемый крутящий момент на основе скорости вращения двигателя внутреннего сгорания, скорости вращения мотор-генератора 80, скорости вращения трансмиссии 16 и величины нажатия педали акселератора. Контроллер 70 затем продвигает процесс к этапу S020. Например, средство памяти хранит характеристику суммарного требуемого крутящего момента, в которой требуемый крутящий момент задается в соответствии со скоростью вращения (двигателя внутреннего сгорания, мотор-генератора и трансмиссии) и величиной нажатия педали акселератора. Контроллер 70 определяет (вычисляет) суммарный требуемый крутящий момент, желаемый водителем, из характеристики суммарного требуемого крутящего момента, скорости вращения и величины нажатия педали акселератора. Процедура для определения суммарного требуемого крутящего момента является уже известной процедурой и, следовательно, не будет описываться.
Контроллер 70 (CPU 71) включает в себя блок 71B вычисления суммарного требуемого крутящего момента, который выполняет процесс на этапе S015 (см. фиг. 1). Блок 71B вычисления суммарного требуемого крутящего момента вычисляет суммарный требуемый крутящий момент, который является суммарной величиной требуемого крутящего момента на основе рабочих условий двигателя внутреннего сгорания и мотор-генератора.
На этапе S020 контроллер 70 делит полученный суммарный требуемый крутящий момент на требуемый крутящий момент двигателя внутреннего сгорания, который должен быть сгенерирован в двигателе внутреннего сгорания, и требуемый крутящий момент мотора, который должен быть сгенерирован в мотор-генераторе. Контроллер 70 затем продвигает процесс к следующему этапу S025. Процедура деления является уже известной процедурой и, следовательно, не будет описываться.
Контроллер 70 (CPU 71) включает в себя блок 71C деления суммарного требуемого крутящего момента (см. фиг. 1) для выполнения процесса на этапе S020. Блок 71C деления суммарного требуемого крутящего момента делит суммарный требуемый крутящий момент на требуемый крутящий момент двигателя внутреннего сгорания, который является требуемым крутящим моментом двигателя внутреннего сгорания, и требуемый крутящий момент мотора, который является требуемым крутящим моментом мотор-генератора.
На этапе S025 контроллер 70 вычисляет целевой выходной крутящий момент двигателя внутреннего сгорания. Целевой выходной крутящий момент двигателя внутреннего сгорания является целевым приводным крутящим моментом, который должен быть сгенерирован двигателем внутреннего сгорания на основе требуемого крутящего момента двигателя внутреннего сгорания. Контроллер 70 затем продвигает процесс к следующему этапу S030. Процедура для вычисления целевого выходного крутящего момента двигателя внутреннего сгорания является уже известной процедурой и, следовательно, не будет описываться.
На этапе S030 контроллер 70 выполняет процесс [SB000: процесс переключения регулирования наддува], который показан на фиг. 9, и затем продвигает процесс к этапу S035. Когда контроллер 70 выполняет этап S030, как показано на фиг. 8, он продвигает процесс к этапу SB010, показанному на фиг. 9.
SB000: Процесс переключения регулирования наддува (фиг. 9)
На этапе SB010, как показано на фиг. 9, контроллер 70 определяет, выполняет ли он или нет в настоящее время регулирование наддува с помощью одного турбонагнетателя (единственное регулирование наддува, в котором наддув выполняется только посредством первого нагнетателя). Если выполняет регулирование наддува с помощью одного турбонагнетателя (Да), контроллер 70 продвигает процесс на этап SB020. Если не выполняет регулирование наддува с помощью одного турбонагнетателя (Нет), контроллер 70 продвигает процесс на следующий этап SB110. Процесс SB000, показанный на фиг. 9, является уже известным процессом. Этот процесс SB000 является примером процесса переключения с регулирования наддува с помощью одного турбонагнетателя (единственного регулирования наддува, в котором наддув выполняется только посредством первого нагнетателя) на регулирование наддува с помощью двух турбонагнетателей (двойное регулирование наддува, в котором наддув выполняется посредством первого и второго нагнетателей). Подробности этапа SB110, который является процессом переключения с регулирования наддува с помощью двух турбонагнетателей на регулирование наддува с помощью одного турбонагнетателя, не будут описаны.
Когда процесс продвигается на следующий этап SB020, контроллер 70 определяет, были или нет установлены условия переключения с регулирования наддува с помощью одного турбонагнетателя на регулирование наддува с помощью двух турбонагнетателей, на основе рабочих условий двигателя внутреннего сгорания. Если условия переключения были установлены (Да), контроллер 70 продвигает процесс на следующий этап SB030. Если условия переключения не были установлены (Нет), контроллер 70 продвигает процесс на обходной этап для этапа SB060A.
Когда процесс продвигается на этап SB030, контроллер 70 определяет, был или нет активирован таймер переключения (см. фиг. 3). Если активирован (Да), контроллер 70 продвигает процесс на следующий этап SB050. Если не активирован (Нет), контроллер 70 продвигает процесс на подэтап этапа SB040.
Когда процесс продвигается на этап SB040, контроллер 70 включает флаг начала переключения и активирует таймер переключения. Процесс затем продвигается на следующий этап SB050.
Когда процесс продвигается на этап SB050, контроллер 70 определяет, указывает ли таймер переключения время перед временем переключения (см. фиг. 3). Когда таймер переключения указывает время перед временем переключения (Да), контроллер 70 продвигает процесс на следующий этап SB060B. Когда таймер переключения указывает то же самое время или опережающее время для времени переключения (Нет), контроллер 70 продвигает процесс на этот обходной этап для этапа SB060C. Значения для времени переключения могут быть установлены в правильные значения посредством различных экспериментов и т.д. с использованием фактического транспортного средства.
Когда процесс продвигается на этап SB060A, регулирование наддува с помощью одного турбонагнетателя сохраняется (продолжается), в котором наддув выполняется только посредством первого нагнетателя. Контроллер 70 управляет впускным обводным клапаном 61, чтобы он был в закрытом состоянии, клапаном 62 переключения всасываемого воздуха, чтобы он был в закрытом состоянии, и клапаном 63 переключения выхлопного газа, чтобы он был в закрытом состоянии (см. фиг. 2). Контроллер 70 затем продвигает процесс к следующему этапу SB070A.
На этапе SB070A контроллер 70 останавливает и инициализирует таймер переключения, завершает процесс, показанный на фиг. 9, и продвигает процесс к этапу S035, показанному на фиг. 8.
Когда процесс продвигается на этап SB060B, переключение с регулирования наддува с помощью одного турбонагнетателя на регулирование наддува с помощью двух турбонагнетателей находится в ходе выполнения (переходный период переключения на фиг. 3). Во время этого переключения операция наддува выполняется с помощью второго нагнетателя и первого нагнетателя, размещенных последовательно. Контроллер 70 управляет впускным обводным клапаном 61 для открытия, клапаном 62 переключения всасываемого воздуха для закрытия, клапаном 63 переключения выхлопного газа для открытия (см. фиг. 3), завершает процесс, показанный на фиг. 9, и затем продвигает процесс к этапу S035, показанному на фиг. 8.
Когда процесс продвигается к этапу SB060C, регулирование наддува с помощью двух турбонагнетателей сохраняется (продолжается), и операция наддува выполняется посредством первого и второго нагнетателей, размещенных параллельно. Контроллер 70 оправляет впускным обводным клапаном 61 для закрытия, клапаном 62 переключения всасываемого воздуха для открытия, клапаном 63 переключения выхлопного газа для открытия (см. фиг. 3) и продвигает процесс к этапу SB070C.
На этапе SB070C контроллер 70 останавливает и инициализирует таймер переключения, завершает процесс, показанный на фиг. 9, и продвигает процесс к этапу S035, показанному на фиг. 8.
Контроллер 70 (CPU 71) включает в себя блок 71G переключения нагнетателей, который выполняет процесс [SB000: процесс переключения регулирования наддува], показанный на фиг. 9. Блок 71G переключения нагнетателей конфигурируется, чтобы переключать число нагнетателей, которые должны использоваться для регулирования наддува. Это выполняется посредством управления средством переключения нагнетателей (впускным обводным клапаном, клапаном переключения всасываемого воздуха и клапаном переключения выхлопного газа) на основе рабочих условий (двигателя внутреннего сгорания). Средство переключения нагнетателей может быть, например, впускным обводным клапаном, клапаном переключения всасываемого воздуха и клапаном переключения выхлопного газа.
Возвращаясь к описанию со ссылкой на фиг. 8, контроллер 70 определяет на этапе S035, является ли флаг начала переключения включенным (флаг включается на этапе SB040 на фиг. 9). Если флаг начала переключения был включен (Да), контроллер 70 продвигает процесс к этапу S040. Если нет (Нет), контроллер 70 продвигает процесс к этапу S050.
Когда процесс продвинулся к этапу S040, контроллер 70 определяет, является ли текущий момент времени временем Ta, показанным на фиг. 3. Если так, контроллер 70 сохраняет рабочие условия двигателя внутреннего сгорания и мотор-генератора перед переключением. Рабочие условия могут быть, например, давлением наддува во впускном коллекторе перед переключением и температурой во впускном коллекторе перед переключением. Контроллер 70 затем продвигает процесс к этапу S045.
Например, контроллер 70 может сохранять текущий расход всасываемого воздуха в качестве расхода всасываемого воздуха перед переключением. Аналогично, контроллер 70 может сохранять текущую температуру окружающей среды в качестве температуры воздуха перед переключением, текущее атмосферное давление в качестве атмосферного давления перед переключением, текущее давление наддува во впускном коллекторе в качестве давления наддува перед переключением во впускном коллекторе и текущую температуру во впускном коллекторе в качестве температуры перед переключением во впускном коллекторе. Контроллер 70 может также сохранять текущую температуру охлаждающей жидкости в качестве температуры хладагента перед переключением, текущую скорость вращения двигателя внутреннего сгорания в качестве скорости вращения двигателя внутреннего сгорания перед переключением текущее давление топлива в качестве давления топлива перед переключением, текущий объем топлива в качестве объема топлива перед переключением и текущий временной интервал впрыска в качестве временного интервала впрыска перед переключением. Контроллер 70 дополнительно может хранить текущее давление выхлопного газа в качестве давления выхлопного газа перед переключением, текущую температуру выхлопного газа в качестве температуры выхлопного газа перед переключением, текущую величину открытия первого сопла в качестве величины открытия первого сопла перед переключением, текущую величину открытия второго сопла в качестве величины открытия второго сопла перед переключением, текущее дифференциальное давление в качестве дифференциального давления перед переключением и текущую величину нажатия педали акселератора в качестве величины нажатия педали акселератора перед переключением. Контроллер 70 может также сохранять текущее состояние аккумуляторной батареи в качестве состояния аккумуляторной батареи перед переключением, текущее состояние инвертора в качестве состояния инвертора перед переключением и текущее состояние мотор-генератора в качестве состояния мотор-генератора перед переключением. Различные физические величины, сохраненные на этапе S040, будут использованы при оценке различных моментов потерь на этапах S060-S080. Физические величины, которые должны быть сохранены в качестве величины "перед переключением", не должны ограничиваться величинами, описанными выше.
На этапе S045 контроллер 70 запускает таймер переходного периода переключения (см. фиг. 3) и продвигает процесс к этапу S050.
Когда процесс продвинулся к этапу S050, контроллер 70 определяет, был или нет активирован таймер переходного периода переключения. Если таймер переходного периода переключения активируется (Да), контроллер 70 продвигает процесс к этапу S055. Если таймер переходного периода переключения не активируется (Нет), контроллер 70 продвигает процесс к этапу S090.
Когда процесс продвигается к этапу S055, контроллер 70 определяет, находится ли время таймера переходного периода переключения перед временем переходного состояния (переходным периодом переключения) (см. фиг. 3). Если перед временем переходного состояния (Да), контроллер 70 продвигает процесс к этапу S060. Когда сверх времени в переходном состоянии переключения, контроллер 70 продвигает процесс к этапу S090. Значение времени переходного состояния (переходного периода переключения) устанавливается так, что оно соответствует времени (периоду), когда снижение в давлении наддува и выходном крутящем моменте происходит. Как показано на фиг. 3, это происходит в предварительно определенное время в течение и после переключения. Значение времени переходного состояния устанавливается в надлежащее значение на основе различных экспериментов с использованием фактических транспортных средств, и т.д. Например, время переходного состояния может длиться приблизительно 1-2 секунды.
Когда процесс продвигается к этапу S090, контроллер 70 останавливает и инициализирует таймер переходного периода переключения. Дополнительно, контроллер 70 инициализирует суммарный момент потерь двигателя внутреннего сгорания и продвигает процесс к этапу S110.
Когда процесс продвинулся к этапу S060, контроллер 70 оценивает момент потери при охлаждении (см. фиг. 5) и продвигает процесс к этапу S065. Например, контроллер 70 может оценивать момент потери при охлаждении из карты значений или т.п. в соответствии с температурой охлаждающей жидкости и давлением наддува. Значения карты могут быть определены, например, посредством различных экспериментов и различных моделирований с использованием фактических транспортных средств. Контроллер 70 оценивает момент потери при охлаждении (перед переключением) с помощью упомянутой карты, давление наддува перед переключением (давление наддува перед переключением во впускном коллекторе), температуру охлаждающей жидкости перед переключением и т.д. Контроллер 70 оценивает (текущий) момент потерь при охлаждении с помощью упомянутой карты, текущее давление наддува (текущее давление наддува во впускном коллекторе), текущую температуру хладагента и т.д. Контроллер 70 затем вычитает момент потери при охлаждении (перед переключением) из (текущего) момента потери при охлаждении, чтобы оценивать увеличение в моменте потери при охлаждении относительно состояния перед переключением. Однако, способ для оценки увеличения в моменте потери при охлаждении не ограничивается вышеупомянутым способом.
На этапе S065 контроллер 70 оценивает момент выхлопной потери (см. фиг. 5) и продвигает процесс к этапу S070. Например, контроллер 70 может оценивать момент выхлопной потери из дифференциального давления DPF и карты значений в соответствии со скоростью потока выхлопного газа и давлением выхлопного газа (давлением в выпускном коллекторе), и т.д. Значения карты могут быть определены, например, посредством различных экспериментов и различных моделирований с использованием фактических транспортных средств. Контроллер 70 может оценивать момент выхлопной потери (перед переключением) с помощью упомянутой карты, скорости потока выхлопного газа перед переключением (вычисленного по расходу всасываемого воздуха перед переключением и температуре выхлопного газа перед переключением), температуры выхлопного газа перед переключением, дифференциального давления перед переключением, открытия сопла перед переключением и т.д. Дополнительно, контроллер 70 оценивает (текущий) момент выхлопной потери с помощью упомянутой карты, текущей скорости потока выхлопного газа (вычисленного по текущему расходу всасываемого воздуха и текущей температуре выхлопного газа), текущего давления выхлопного газа, текущего дифференциального давления, текущего открытия сопла и т.д. Давление выхлопного газа перед переключением (давление в выпускном коллекторе) может быть оценено из давления выхлопного газа перед переключением (давление ниже по потоку от турбины), открытия сопла перед переключением и т.д. Контроллер 70 может затем оценивать снижение момента выхлопной потери посредством вычитания (текущего) момента выхлопной потери из момента выхлопной потери (перед переключением). Однако, способ для оценки снижения момента выхлопной потери не ограничивается вышеописанным способом.
На этапе S070 контроллер 70 оценивает момент насосной потери (см. фиг. 5) и продвигает процесс к этапу S075. Например, контроллер 70 может оценивать момент насосной потери из карты значений в соответствии с давлением наддува и давлением выхлопного газа (давлением в выпускном коллекторе), давление наддува, давление выхлопного газа и площадь верхней поверхности поршня. Значения карты могут быть определены, например, посредством различных экспериментов и различных моделирований с использованием фактических транспортных средств. Контроллер 70 может оценивать момент насосной потери (перед переключением) с помощью карты, давления наддува перед переключением (давления наддува перед переключением во впускном коллекторе), давления выхлопного газа перед переключением, давления наддува перед переключением (давления наддува перед переключением во впускном коллекторе), давления выхлопного газа перед переключением, площади верхней стороны поршня и т.д. Дополнительно, контроллер 70 может оценивать (текущий) момент насосной потери с помощью карты, текущего давления наддува (текущего давления наддува во впускном коллекторе), текущего давления выхлопного газа, площади верхней стороны поршня и т.д. Дополнительно, давление выхлопного газа перед переключением (давление в выпускном коллекторе) может быть оценено по давлению выхлопного газа перед переключением (давлению ниже по потоку от турбины) и величине открытия сопла перед переключением, и т.д. Затем, контроллер 70 может оценивать увеличение в моменте насосной потери посредством вычитания момента насосной потери (перед переключением) из (текущего) момента насосной потери. Способ для оценки увеличения в моменте насосной потери не ограничивается вышеописанным способом.
На этапе S075 контроллер 70 оценивает момент потери вследствие неполного сгорания топлива (см. фиг. 5-7) и продвигает процесс к этапу S080. Например, контроллер 70 может оценивать момент потери вследствие неполного сгорания топлива из карты значений (см. фиг. 6 и фиг. 7) в соответствии со скоростью вращения и объемом впрыска. Значение карты может быть определено посредством различных экспериментов и различных моделирований с использованием фактических транспортных средств. Контроллер 70 может оценивать момент потери вследствие неполного сгорания топлива (перед переключением) с помощью карты (см. фиг. 6 и 7), давления наддува перед переключением во впускном коллекторе, температуры перед переключением во впускном коллекторе, скорости вращения перед переключением, объема впрыска перед переключением и т.д. Дополнительно, контроллер 70 может оценивать (текущий) момент потери вследствие неполного сгорания топлива с помощью карты (см. фиг. 6 и 7), текущего давления наддува во впускном коллекторе, текущей температуры во впускном коллекторе, текущей скорости вращения, текущего объема впрыска и т.д. Затем, контроллер 70 может оценивать увеличение в моменте потери вследствие неполного сгорания топлива посредством вычитания момента потери вследствие неполного сгорания топлива (перед переключением) из (текущего) момента потери вследствие неполного сгорания топлива. Способ для оценки увеличения в моменте потери вследствие неполного сгорания топлива не ограничивается вышеописанным способом.
На этапе S080 контроллер 70 оценивает суммарные моменты потерь двигателя внутреннего сгорания и продвигает процесс к этапу S110. В этом случае контроллер 70 оценивает (вычисляет) суммарный момент потерь двигателя внутреннего сгорания следующим образом: "суммарный момент потерь двигателя внутреннего сгорания=момент потери при охлаждении - момент выхлопной потери+момент насосной потери+момент потери вследствие неполного сгорания топлива" (см. фиг. 5).
Контроллер 70 (CPU 71) может включать в себя блок 71D оценки суммарного момента потерь двигателя внутреннего сгорания, который выполняет вышеописанные процессы этапов S025 и S060-S080. Блок 71D оценки суммарного момента потерь двигателя внутреннего сгорания оценивает суммарный момент потерь двигателя внутреннего сгорания из целевого выходного крутящего момента двигателя внутреннего сгорания. Т.е., оценки суммарной величины потери приводного крутящего момента из целевого приводного крутящего момента, который должен быть сгенерирован двигателем внутреннего сгорания на основе требуемого крутящего момента двигателя внутреннего сгорания. В это время контроллер 70 оценивает суммарный момент потерь двигателя внутреннего сгорания, получающийся в результате снижения наддува. Снижение наддува может происходить посредством управления средством переключения нагнетателя. Снижение наддува может происходить в течение переходного периода переключения. Снижение наддува может происходить непосредственно после изменения числа нагнетателей и может длиться до тех пор, пока целевое состояние наддува не будет достигнуто (см. фиг. 3). Средство переключения нагнетателя может быть, например, впускным обводным клапаном, клапаном переключения всасываемого воздуха, клапаном переключения выхлопного газа или т.п.
На этапе S110 контроллер 70 вычисляет компенсационный крутящий момент мотора на основе суммарного момента потерь двигателя внутреннего сгорания. Контроллер 70 затем продвигает процесс к этапу S115. Например, контроллер 70 может устанавливать значение компенсационного крутящего момента мотора практически в такое же значение, что и суммарное значение момента потерь двигателя внутреннего сгорания (см. "компенсационный момент мотора", показанный на фиг. 3).
Контроллер 70 (CPU 71) включает в себя блок 71E вычисления компенсационного крутящего момента мотора (см. фиг. 1) для выполнения процесса на этапе S110. Блок 71E вычисления компенсационного крутящего момента мотора вычисляет компенсационный момент мотора, который должен быть использован мотор-генератором, чтобы компенсировать суммарный момент потерь двигателя внутреннего сгорания.
На этапе S115 контроллер 70 складывает компенсационный момент мотора с требуемым крутящим моментом мотора (вычисленным на этапе S020), чтобы определять целевой выходной крутящий момент мотора (см. "целевой выходной крутящий момент мотора" на фиг. 3). Контроллер 70 затем продвигает процесс к этапу S120.
Контроллер 70 (CPU 71) включает в себя блок 71F выполнения компенсации крутящего момента для выполнения процесса на этапе S115 (см. фиг. 1). Блок 71F выполнения компенсации крутящего момента складывает требуемый крутящий момент мотора и компенсационный момент мотора и определяет целевой выходной крутящий момент мотора, который является целевым приводным крутящим моментом, который должен быть сгенерирован мотор-генератором.
На этапе S120 контроллер 70 выключает флаг начала переключения и завершает процесс, показанный на фиг. 8.
Процесс впрыска топлива (фиг. 10) и процесс управления мотор-генератором (фиг. 11)
Фиг. 10 является существующим процессом, схематично показывающим процесс впрыска топлива. Контроллер 70 начинает процесс, показанный на фиг. 10, в предварительно определенный момент времени и продвигает процесс к этапу Q010.
На этапе SQ010 контроллер 70 определяет объем топлива в соответствии с целевым выходным крутящим моментом двигателя внутреннего сгорания, сохраняет объем топлива в качестве целевого объема топлива и продвигает процесс к этапу SQ020.
На этапе SQ020 контроллер 70 впрыскивает топливо целевого объема топлива из инжектора в предварительно определенный момент времени (момент времени впрыска топлива) и завершает процесс.
Фиг. 11 является существующим процессом, схематично показывающим процесс управления мотор-генератором. Контроллер 70 начинает процесс, показанный на фиг. 11, в предварительно определенный момент времени и продвигает процесс к этапу SM010.
На этапе SM010 контроллер 70 управляет мотор-генератором на основе целевого выходного крутящего момента мотора и завершает процесс.
С вышеописанными процессами посредством контроллера 70 представляется возможным формировать приводной крутящий момент с уменьшенным снижением крутящего момента от суммарного требуемого крутящего момента, как показано посредством раздела "приводной крутящий момент, фактически генерируемый двигателем внутреннего сгорания+приводной крутящий момент, фактически генерируемый мотор-генератором" на фиг. 3.
Пример транспортного средства, оборудованного альтернативной гибридной системой 1A (фиг. 12)
Фиг. 12 показывает пример транспортного средства, оборудованного гибридной системой 1A, альтернативной гибридной системе 1, показанной на фиг. 2. В транспортном средстве, показанном на фиг. 2, по меньшей мере, один из двигателя 10 внутреннего сгорания и мотор-генератора 80 приводит в движение задние колеса RR, RL. С другой стороны, в транспортном средстве, показанном на фиг. 12, двигатель 10 внутреннего сгорания приводит в движение передние колеса FR1, FL1 (передние колеса), в то время как мотор-генератор 80 приводит в движение задние колеса RR, RL (задние колеса). Более конкретно, транспортное средство, показанное на фиг. 12 имеет привод на два колеса, когда приводной крутящий момент формируется каким-либо одним из двигателя 10 внутреннего сгорания или мотор-генератора 80. Транспортное средство имеет привод на четыре колеса (привод на все колеса), когда приводной крутящий момент формируется двигателем 10 внутреннего сгорания и мотор-генератором 80. Далее в данном документе отличия транспортного средства на фиг. 12 от транспортного средства, показанного на фиг. 2, будут, главным образом, описаны.
Транспортное средство, показанное на фиг. 12, включает в себя ведущие колеса FR1, FL1, RR, RL, дифференциалы 17F, 17, трансмиссию 16, муфту 15C сцепления, мотор-генератор 80, двигатель 10 внутреннего сгорания, контроллер 70, инвертор 81, аккумуляторную батарею 82 и т.д. Контроллер 70 приспособлен для обнаружения скорости вращения двигателя 10 внутреннего сгорания на основе обнаруженного сигнала от средства 25 обнаружения вращения. Контроллер 70 приспособлен для обнаружения скорости вращения мотор-генератора 80 на основе обнаруженного сигнала от средства 80A обнаружения вращения. Контроллер 70 дополнительно приспособлен для обнаружения скорости вращения входного вала дифференциала 17 на основе обнаруженных сигналов от средства 17A обнаружения вращения.
Контроллер 70 обнаруживает рабочие условия двигателя 10 внутреннего сгорания, мотор-генератора 80, инвертора 81 и аккумуляторной батареи 82. Контроллер 70 управляет двигателем 10 внутреннего сгорания, мотор-генератором 80, инвертором 81, аккумуляторной батареей 82 и муфтой 15C сцепления в соответствии с рабочими условиями.
Например, когда только передние ведущие колеса FR1, FL1 должны приводиться в движение, контроллер 70 управляет двигателем 10 внутреннего сгорания и формирует приводной крутящий момент. В это время, контроллер 70 управляет муфтой 15C сцепления, чтобы она была в расцепленном состоянии, для управления инвертором 81, так что приводной крутящий момент не формируется мотор-генератором 80. В отличие от этого, когда только задние ведущие колеса RR, RL должны приводиться в движение, контроллер 70 управляет инвертором 81, так что приводной крутящий момент формируется от мотор-генератора 80, и регулирует муфту 15C сцепления в зацепленное состояние. В это время, контроллер 70 останавливает двигатель 10 внутреннего сгорания. Когда передние и задние ведущие колеса FR1, FL1, RR, RL должны приводиться в движение, контроллер 70 управляет двигателем 10 внутреннего сгорания, чтобы формировать приводной крутящий момент. Кроме того, контроллер 70 управляет инвертором 81, так что приводной крутящий момент формируется от мотор-генератора 80, и регулирует муфту 15C сцепления в зацепленное состояние.
Контроллер для гибридной системы согласно настоящему изобретению не должен ограничиваться конфигурацией, конструкцией, процедурами обработки, операциями и т.п., описанными в настоящих вариантах осуществления, и различные модификации, добавления и удаления могут быть выполнены без отступления от рамок настоящего изобретения. Дополнительно, система двигателя внутреннего сгорания и система мотор-генератора не должны ограничиваться системами, описанными в настоящих вариантах осуществления, и могут быть применимы к различным системам двигателя внутреннего сгорания и системам мотор-генератора.
Вышеописанная система двигателя внутреннего сгорания включает в себя два нагнетателя, а именно, первый нагнетатель и второй нагнетатель. Альтернативно, система двигателя внутреннего сгорания может иметь три или более нагнетателей, и вышеописанные конструкции могут быть применены, чтобы уменьшать снижение крутящего момента в течение переходных периодов переключения непосредственно после изменения числа нагнетателей. Вышеописанные варианты осуществления включают в себя первый нагнетатель и второй нагнетатель для наддува параллельно, и первый нагнетатель и второй нагнетатель могут выполнять наддув последовательно. Альтернативно, также представляется возможным конфигурировать предоставление множества нагнетателей, выполняющих наддув параллельно, причем это множество нагнетателей может выполнять наддув последовательно. Также с этой конфигурацией, посредством применения системы, описанной выше, представляется возможным уменьшать снижение крутящего момента в течение переходного периода переключения непосредственно после изменения числа нагнетателей. Вышеописанный двигатель внутреннего сгорания включает в себя множество турбонагнетателей в качестве примеров нагнетателей. Альтернативно, система двигателя внутреннего сгорания может включать в себя множество механически приводимых в действие нагнетателей. Альтернативно, сочетание одного или более турбонагнетателей и нагнетателей может быть использовано в качестве нагнетателей. Также в этой конфигурации, посредством применения системы, описанной выше, представляется возможным уменьшать снижение крутящего момента в течение переходного периода переключения непосредственно после изменения числа нагнетателей.
В вышеописанных вариантах осуществления мотор-генератор приводится в действие, чтобы компенсировать снижение крутящего момента, вызванное снижением наддува, когда число нагнетателей, которые должны быть задействованы, изменяется с одного на два. Альтернативно или в дополнение к этому снижению крутящего момента, мотор-генератор может быть приведен в действие, чтобы компенсировать снижение крутящего момента (момент потерь), вызванное различными факторами. Гибридная система может иметь конструкцию, как показанная, например, гибридная система на фиг. 2 или фиг. 12. Альтернативно, гибридная система может иметь различные конструкции, чтобы формировать приводной крутящий момент посредством двигателя внутреннего сгорания и мотор-генератора. Гибридная система, как описано выше, устанавливается в транспортном средстве. Альтернативно, гибридная система может быть использована для других целей.
В вышеописанных вариантах осуществления суммарный момент потерь двигателя внутреннего сгорания определяется на основе момента потери при охлаждении, момента выхлопного газа, момента насосной потери и момента потери вследствие неполного сгорания топлива. Как описано выше, момент потери при охлаждении является преобладающим (доля является большой) в суммарном моменте потерь двигателя внутреннего сгорания. Момент потери вследствие неполного сгорания топлива, момент выхлопной потери и момент насосной потери являются меньшими по сравнению момента потери при охлаждении. Следовательно, суммарный момент потерь двигателя внутреннего сгорания может предпочтительно включать в себя момент потери при охлаждении и более предпочтительно включает в себя, по меньшей мере, одно из момента потери вследствие неполного сгорания топлива, момента выхлопной потери или момента насосной потери в дополнение к моменту потери при охлаждении.
Кроме того, числовые значения, используемые в описании настоящих вариантов осуществления, являются просто примерами и не должны ограничиваться этими числовыми значениями. Дополнительно, равно или больше (≥), равно или меньше (≤), больше (>), меньше (<) и т.д., могут или не могут включать в себя знак равенства.
Различные примеры, описанные подробно выше, со ссылкой на присоединенные чертежи, предназначаются быть показательными для настоящего изобретения и, таким образом, являются неограничивающими вариантами осуществления. Подробное описание предназначается, чтобы научить специалиста в области техники созданию, использованию и/или практическому применению различных аспектов настоящих учений, и, таким образом, не ограничивает рамки изобретения каким-либо образом. Кроме того, каждый из дополнительных признаков и учений, описанных выше, может быть применен и/или использован отдельно или с другими признаками и учениями в любом их сочетании, чтобы предоставлять улучшенный контроллер для гибридной системы и/или способы его создания и использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ (варианты) и система для управления наддувом | 2016 |
|
RU2718389C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2015 |
|
RU2680027C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ КЛАПАНА ПЕРЕПУСКНОЙ ЗАСЛОНКИ ТУРБОНАГНЕТАТЕЛЯ И СИСТЕМА ТУРБОНАГНЕТАТЕЛЯ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2667198C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ С НАДДУВОМ И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2576564C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ НА ВПУСКЕ КОМПРЕССОРА КОМПРЕССИОННОЙ СИСТЕМЫ В ДВИГАТЕЛЕ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2631582C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ НАГНЕТАТЕЛЕМ | 2017 |
|
RU2712536C2 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ ДАВЛЕНИЯ НАДДУВА | 2017 |
|
RU2684858C2 |
| СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ ТУРБОНАГНЕТАТЕЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2705489C2 |
| СПОСОБ ПОДАЧИ РАЗРЕЖЕНИЯ В ДВИГАТЕЛЬ (ВАРИАНТЫ), ДВИГАТЕЛЬ И СПОСОБ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2602710C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2013 |
|
RU2636977C2 |
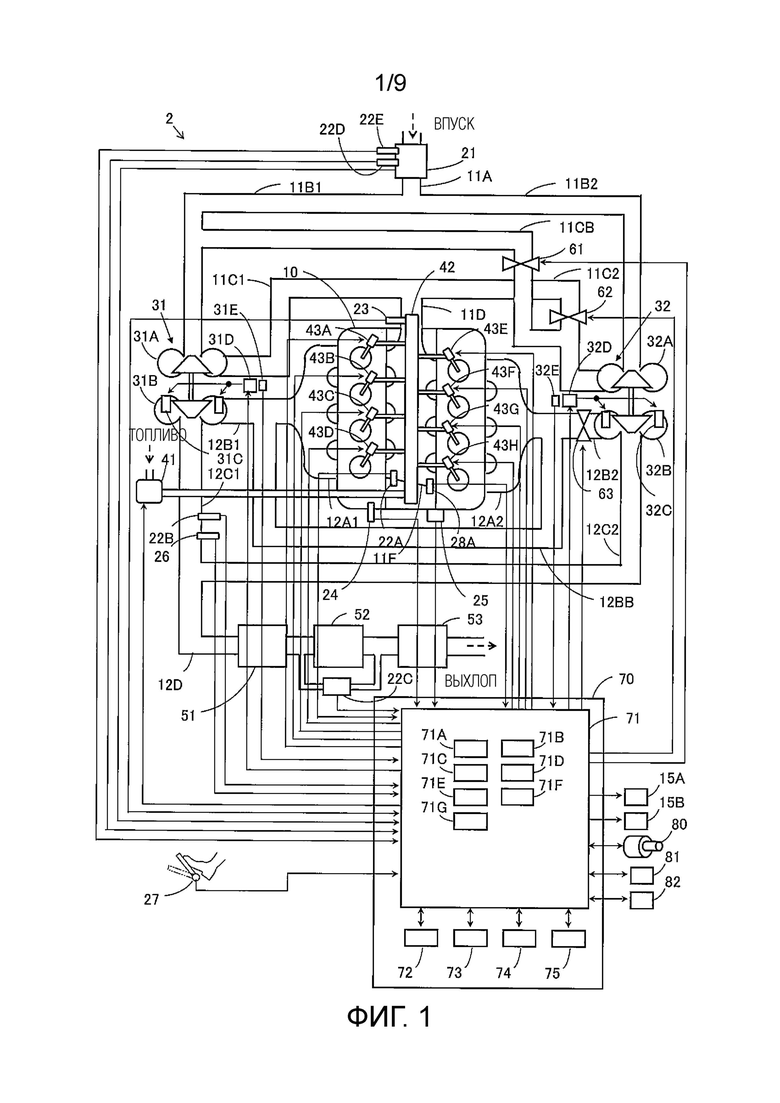
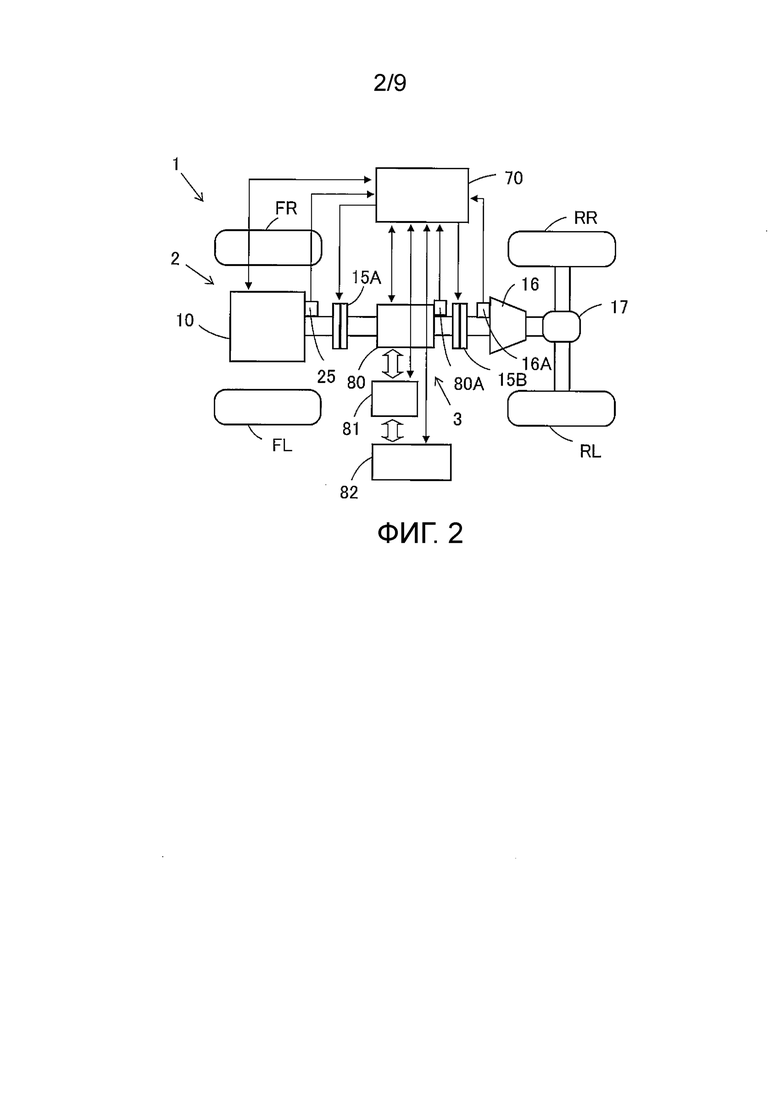
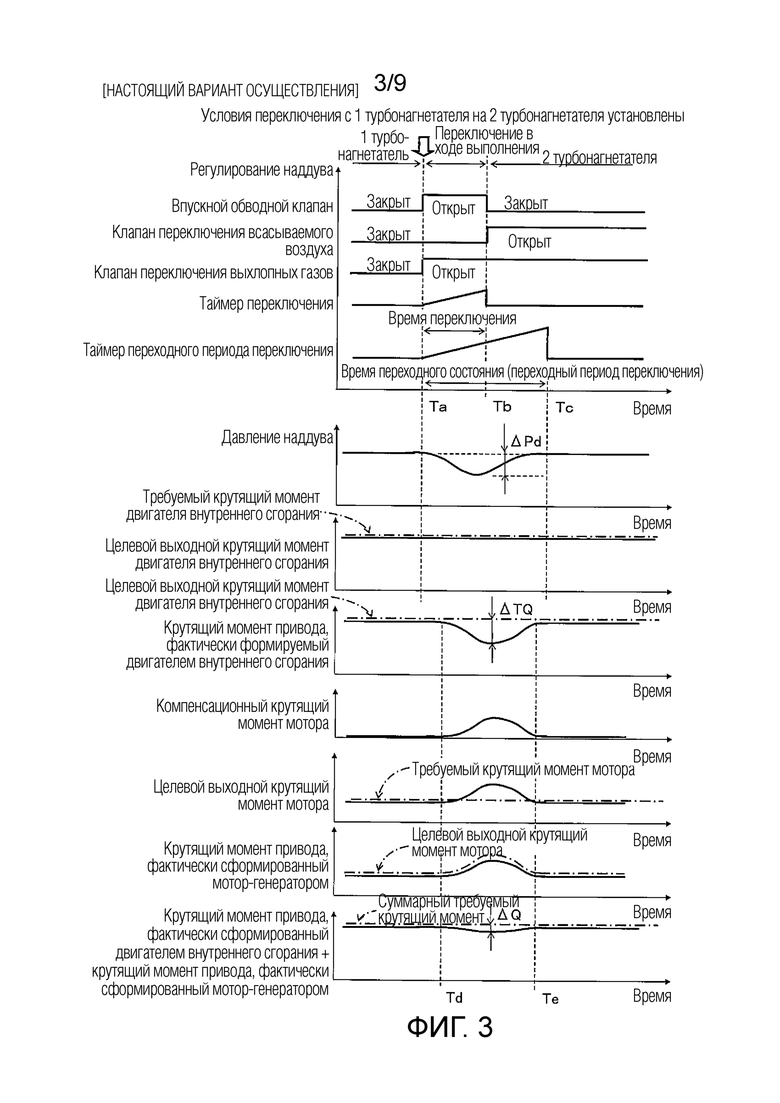
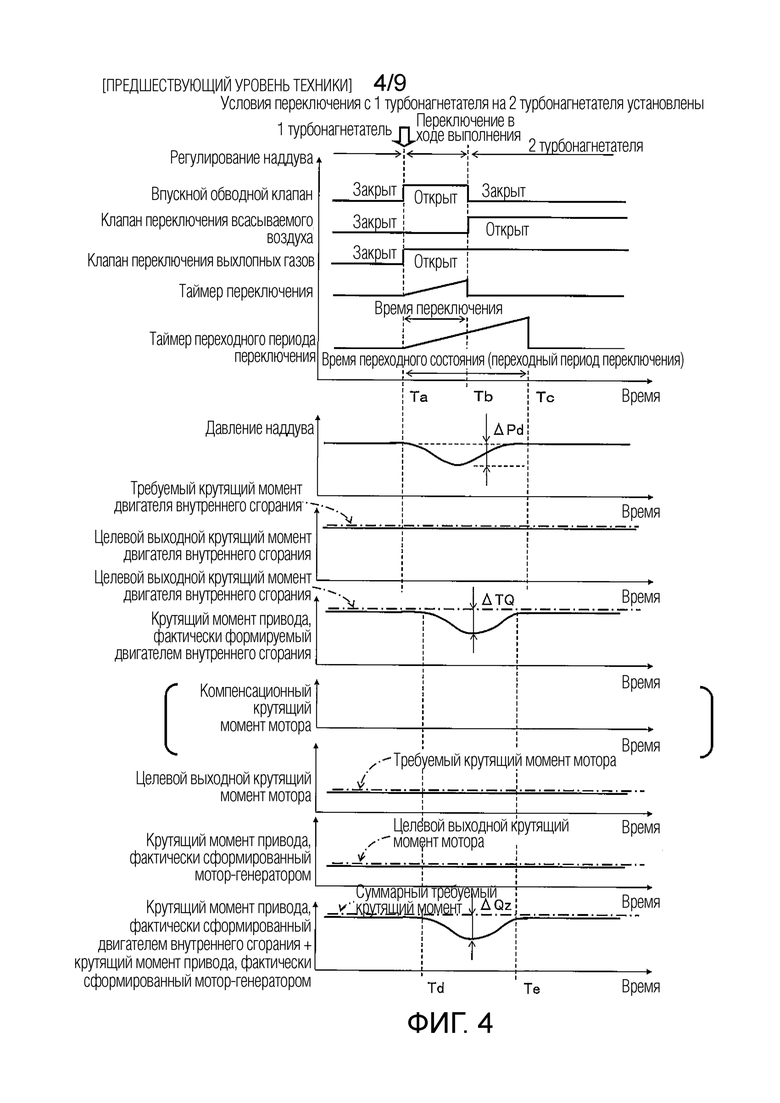




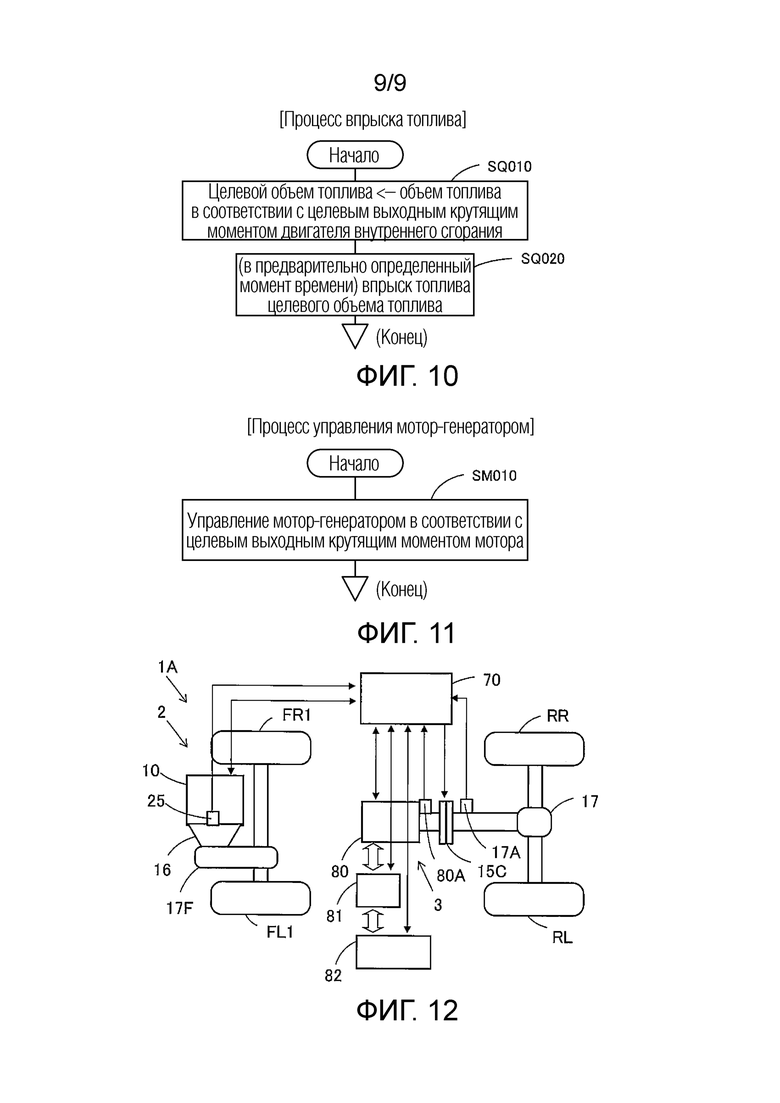
Изобретение относится к контроллеру для гибридной системы и, в частности, к контроллеру для управления гибридной системой, выполненной с возможностью генерирования приводного крутящего момента с помощью двигателя внутреннего сгорания и мотор-генератора. Техническим результатом является обеспечение компенсации потерянного крутящего момента, вызванного двигателем внутреннего сгорания, и уменьшение снижения крутящего момента. Устройство содержит блок обнаружения рабочих условий для контроллера, блок вычисления суммарного требуемого крутящего момента, блок деления суммарного требуемого крутящего момента, блок оценки суммарного момента потерь двигателя внутреннего сгорания, блок вычисления компенсационного крутящего момента мотора, блок выполнения компенсации крутящего момента. 7 з.п. ф-лы, 12 ил.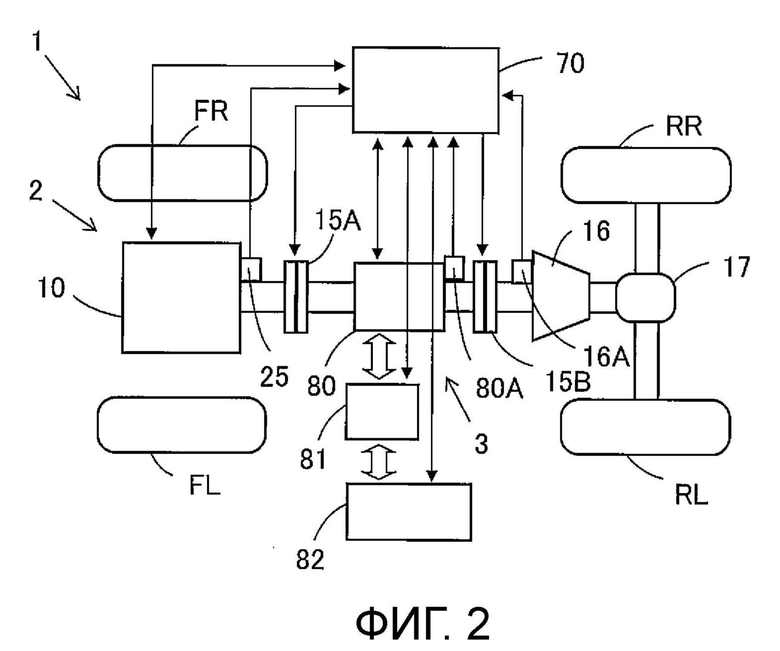
1. Контроллер для управления гибридной системой, выполненной с возможностью генерирования приводного крутящего момента посредством двигателя внутреннего сгорания и мотор-генератора, содержащий:
блок обнаружения рабочих условий для обнаружения рабочих условий двигателя внутреннего сгорания и мотор-генератора;
блок вычисления суммарного требуемого крутящего момента для вычисления суммарного требуемого крутящего момента на основе рабочих условий;
блок деления суммарного требуемого крутящего момента для деления суммарного требуемого крутящего момента на требуемый крутящий момент двигателя внутреннего сгорания и требуемый крутящий момент мотора;
блок оценки суммарного момента потерь двигателя внутреннего сгорания для оценки суммарного момента потерь двигателя внутреннего сгорания, сгенерированного посредством двигателя внутреннего сгорания, на основе требуемого крутящего момента двигателя внутреннего сгорания;
блок вычисления компенсационного крутящего момента мотора для вычисления компенсационного крутящего момента мотора, который должен быть использован мотор-генератором, чтобы компенсировать суммарный момент потерь двигателя внутреннего сгорания; и
блок выполнения компенсации крутящего момента, выполненный с возможностью складывания требуемого крутящего момента мотора и компенсационного крутящего момента мотора для определения целевого выходного крутящего момента мотора, который должен быть сгенерирован посредством мотор-генератора.
2. Контроллер по п. 1, при этом двигатель внутреннего сгорания содержит:
множество нагнетателей; и
средство переключения нагнетателей, выполненное с возможностью изменения числа нагнетателей, которые должны быть использованы для регулирования наддува, причем контроллер содержит блок переключения нагнетателей, выполненный с возможностью: управления средством переключения нагнетателей на основе рабочих условий и изменения числа нагнетателей, которые должны быть использованы для регулирования наддува, при этом:
блок оценки суммарного момента потерь двигателя внутреннего сгорания оценивает суммарный момент потерь двигателя внутреннего сгорания, получающийся в результате снижения наддува в переходном периоде переключения, и
переходный период переключения является периодом времени с момента непосредственно после переключения числа нагнетателей посредством управления средством переключения нагнетателей до тех пор, пока не будет достигнуто целевое состояние наддува.
3. Контроллер по п. 2, в котором суммарный момент потерь двигателя внутреннего сгорания, оцененный посредством контроллера, включает в себя момент потери при охлаждении, который теряется вследствие увеличенной величины тепловой потери поршней и цилиндров двигателя внутреннего сгорания в течение переходного периода переключения.
4. Контроллер по п. 2 или 3, в котором суммарный момент потерь двигателя внутреннего сгорания, оцененный посредством контроллера, дополнительно включает в себя момент потери вследствие неполного сгорания топлива, который должен быть потерян вследствие увеличенного объема топлива, которое не полностью реагирует с воздухом в цилиндрах в течение переходного периода переключения.
5. Контроллер по п. 2 или 3, в котором суммарный момент потерь двигателя внутреннего сгорания, оцененный посредством контроллера, дополнительно включает в себя момент выхлопной потери в соответствии с уменьшенной величиной потери выхлопного газа в течение переходного периода переключения.
6. Контроллер по п. 5, в котором потеря выхлопного газа, получающаяся в результате снижения наддува, основывается на скорости потока выхлопного газа из цилиндров двигателя внутреннего сгорания.
7. Контроллер по п. 2 или 3, в котором суммарный момент потерь двигателя внутреннего сгорания, оцененный посредством контроллера, дополнительно включает в себя момент насосной потери, который теряется вследствие увеличенной величины насосной потери в ответ на перекачивающие действия на впуске и выпуске посредством поршней в течение переходного периода переключения.
8. Контроллер по любому из пп. 1-3, при этом:
гибридная система установлена на транспортном средстве,
выходной крутящий момент, сгенерированный посредством двигателя внутреннего сгорания, передается передним колесам транспортного средства, а
целевой выходной крутящий момент мотора, генерируемый мотор-генератором, передается задним колесам транспортного средства.
| JP 2010190070 A, 02.09.2010 | |||
| КОНТРОЛЛЕР ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2633208C1 |
| КОНТРОЛЛЕР И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2670370C2 |
| СИСТЕМА И СПОСОБ ПРИМЕНЕНИЯ АКТИВНОГО МЕХАНИЗМА НАТЯЖЕНИЯ РЕМНЯ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА С РЕМЕННОЙ ПЕРЕДАЧЕЙ | 2018 |
|
RU2688613C1 |
| JP 2010274726 A, 09.12.2010 | |||
| JP 2006280049 A, 12.10.2006. | |||

