Область техники
Настоящее изобретение относится к способам и системам для активного механизма натяжения ремня встроенного стартер-генератора с ременной передачей (ВСГРП), соединенного с двигателем транспортного средства.
Уровень техники и краткое раскрытие
Транспортные средства могут быть выполнены с мотором стартера для вращения двигателя при запуске. В некоторых системах транспортного средства мотор стартера может входить в состав встроенного стартер-генератора с ременной передачей (ВСГРП), в котором электрический мотор-генератор (действующий в режиме мотора) обеспечивает крутящий момент для проворачивания двигателя посредством ременного привода во время условий перезапуска двигателя. Во время других условий мотор-генератор может работать в режиме генератора для зарядки системного аккумулятора с использованием избыточного крутящего момента двигателя. При этом ВСГРП обеспечивает функции останова и запуска. ВСГРП может также использоваться вместо генератора переменного тока для обеспечения функций питания дополнительных устройств, когда двигатель выключен, и транспортное средство остановлено. Кроме того, ВСГРП может использоваться для работы в составе гибридной силовой установки для дополнения крутящего момента двигателя посредством добавления крутящего момента мотора, с питанием от аккумулятора. Таким образом, использование ВСГРП может улучшить эффективность функционирования транспортного средства и повысить экономию топлива.
Системы ВСГРП могут содержать один или несколько механизмов натяжения ременного привода, соединяющего ВСГРП с коленчатым валом двигателя и одним или несколькими вспомогательными устройствами, например, с системой кондиционирования воздуха. Натяжение ремня можно поддерживать посредством пассивных механизмов натяжения, содержащих, например, различные шкивы и нагруженные пружины, со встроенными амортизаторами. В качестве альтернативы натяжение ремня может быть обеспечено посредством активно управляемых устройств механизма натяжения, например, электрических, гидравлических или электрогидравлических устройств, выполненных с возможностью выборочного увеличения натяжения ремня только в том случае, когда существуют высокие требования по крутящему моменту. Механизмы натяжения ремня могут периодически подвергать диагностике, для поддержания силы натяжения ременного привода и, таким образом, для уменьшения потерь на трение.
Один пример подхода для диагностики функциональности механизма натяжения предложен Зеттелем и др. в патенте США US 20080021603. В этом случае ременной привод соединяет мотор-генератор с двигателем и вспомогательным устройством, и неисправное состояние ременного привода определяют на основе сравнения частоты вращения двигателя относительно частоты вращения вспомогательного устройства. В частности, если ожидаемая частота вращения вспомогательного устройства, определенная на основе измеренной частоты вращения двигателя, отличается от фактической частоты вращения вспомогательного устройства, то могут сделать вывод, что имеет место проскальзывание ремня.
Однако авторы настоящего изобретения обнаружили возможные недостатки такого подхода. Согласно одному примеру, к тому времени, когда обнаруживается проскальзывание ремня по способу Зеттеля, уже может иметь место избыточное проскальзывание, требующее дорогостоящей замены ремня. В другом примере такой подход Зеттеля не позволяет идентифицировать причину проскальзывания ремня. Проскальзывание ремня может быть вызвано недостаточной силой натяжения ремня, что может ухудшить проворачивание двигателя и увеличение крутящего момента. В качестве альтернативы проскальзывание ремня может быть вызвано увеличением силы натяжения ремня при всех условиях, которые могут вызвать увеличение износа двигателя и ремня. Если причина проскальзывания ремня точно не определена, это может затруднить компенсацию будущих событий проскальзывания ремня. В случае использования механизмов натяжения ремня, соединенных с ВСГРП, определение причины проскальзывания ремня на основе частоты вращения двигателя или частоты вращения вспомогательного устройства может быть дополнительно осложнено в результате способности ВСГРП увеличивать силу натяжения посредством добавления положительного крутящего момента или отрицательного крутящего момента к ременной передаче во время переходного процесса для крутящего момента, например, при внезапном увеличении или уменьшении крутящего момента ВСГРП.
Авторы настоящего изобретения обнаружили вышеупомянутые проблемы и разработали способ работы двигателя для идентификации неисправности активного механизма натяжения ремня. Один пример способа для двигателя содержит: регулирование рабочего состояния механизма натяжения ремня, соединенного с приводным ремнем; и указание на неисправность механизма натяжения в качестве реакции на то, что нагрузка двигателя меньше пороговой нагрузки после регулирования. Таким образом, причина проскальзывания ремня может быть надежно идентифицирована до того, как произойдет чрезмерное проскальзывание, что позволяет своевременно выполнить компенсирующие действия.
Например, система гибридного транспортного средства может содержать двигатель, соединенный с ВСГРП и вспомогательным устройством посредством ременного привода вспомогательного устройства переднего расположения (ПВУПР). Ременной привод может дополнительно содержать активный механизм натяжения, присоединенный между коленчатым валом двигателя и ВСГРП. Активный механизм натяжения может представлять собой электрогидравлический активный механизм натяжения, выполненный с возможностью работы с меньшей силой натяжения, когда крутящий момент ВСГРП ниже порогового крутящего момента и с большей силой натяжения, когда положительный или отрицательный крутящий момент, обеспеченный ВСГРП, меньше другого порогового крутящего момента. В частности, во время запуска двигателя, могут включить электромагнит для того, чтобы перевести механизм натяжения в выдвинутое состояние, когда механизм натяжения прикладывает большую силу натяжения к ременной передаче. Более высокая сила натяжения позволяет передавать положительный крутящий момент от ВСГРП, работающего в качестве мотора, для проворачивания двигателя. Во время события запуска двигателя или события остановки двигателя электромагнит могут снова включить для перевода механизма натяжения в выдвинутое состояние. Более высокая сила натяжения позволяет передавать отрицательный крутящий момент от ВСГРП, работающего в качестве генератора, для остановки двигателя, при одновременном демпфировании пульсаций крутящего момента двигателя. Во время всех других условий работы двигателя электромагнит может быть обесточен для перевода механизма натяжения во втянутое состояние, когда механизм натяжения прикладывает более низкую силу натяжения к ременной передаче. Во время выбранных условий, например, когда двигатель работает в установившемся режиме, и крутящий момент ВСГРП равен нулевому крутящему моменту или близок к этому значению, механизм натяжения могут активным образом переключить в выдвинутое состояние и могут отслеживать в течение некоторого периода времени один или несколько параметров крутящего момента двигателя, которые могут указать на увеличение нагрузки двигателя. Например, могут отслеживать один или несколько параметров из следующих: поток впускного воздуха, давление воздуха во впускном коллекторе, темп потребления топлива двигателем и выработка крутящего момента двигателя. Если наблюдаемые параметры остаются внутри ожидаемых диапазонов, то измеренное увеличение нагрузки двигателя приписывают процессу выдвижения механизма натяжения и приложению увеличенной силы натяжения к ременной передаче, как и предполагалось. Если наблюдаемые параметры принимают значения ниже ожидаемых диапазонов, то могут сделать вывод, что отсутствие увеличения нагрузки двигателя происходит вследствие того, что механизм натяжения не выдвигается (например, механизм натяжения застрял во втянутом состоянии), и что проскальзывание ремня может происходить вследствие недостаточного натяжения ремня. Опционально, механизм натяжения могут подобным образом перевести во втянутое состояние, и могут сделать вывод, что механизм натяжения не втянулся (например, механизм натяжения застрял в выдвинутом состоянии), если значения наблюдаемых параметров выше ожидаемых диапазонов, и дополнительно могут сделать вывод, что проскальзывание ремня может происходить вследствие чрезмерного натяжения ремня. Соответственно, могут выполнить различные компенсирующие действия. Например, в качестве реакции на застревание механизма натяжения во втянутом состоянии могут ограничить дополнительную мощность, вырабатываемую ВСГРП, и операции запуска и остановки. В другом примере в качестве реакции на застревание механизма натяжения в выдвинутом состоянии могут ограничить увеличение крутящего момента двигателя для предотвращения повреждения ремня ПВУПР и опорных подшипников двигателя.
Таким образом, можно выполнить точную и надежную диагностику активного механизма натяжения ВСГРП, позволяющую улучшить прогнозирование проскальзывания ремня. Технический эффект от переключения активного механизма натяжения в выбранное состояние и наблюдение изменений нагрузки ПВУПР после этого переключения заключается в том, что можно лучше идентифицировать фактическое рабочее состояние механизма натяжения. За счет наблюдения за изменением нагрузки ПВУПР для сравнения фактического состояния механизма натяжения относительно заданного командой состояния можно отличить состояние избыточного натяжения ремня от состояния недостаточного натяжения ремня. Следовательно, состояние проскальзывания ремня и вероятная причина проскальзывания ремня могут быть своевременно идентифицированы до того, как произойдет чрезмерное проскальзывание. За счет своевременной диагностики механизма натяжения ремня можно дольше сохранять исправное состояние ремня, что обеспечивает преимущества экономии топлива системы ВСГРП в течение более длительного времени.
Вышеуказанные преимущества, другие преимущества, а также отличительные признаки настоящего изобретения будут очевидными из раздела «Осуществление изобретения», который можно рассматривать отдельно или совместно с приложенными иллюстрациями.
Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 показана схема системы двигателя, соединенного с системой гибридного транспортного средства.
На фиг. 2 показана схема конструкции привода вспомогательного устройства переднего расположения, соединенного с системой двигателя в системе гибридного транспортного средства.
На фиг. 3 показан пример схемы системы ПВУПР с ВСГРП.
На фиг. 4 показан пример схемы активного механизма натяжения ПВУПР с ВСГРП в состоянии с поданной энергией и в состоянии без поданной энергии.
На фиг. 5 показана блок-схема алгоритма, иллюстрирующего пример способа регулирования силы натяжения в приводе ПВУПР посредством активного механизма натяжения ВСГРП.
На фиг. 6 показана блок-схема алгоритма, иллюстрирующего пример способа диагностики активного механизма натяжения ВСГРП согласно настоящему изобретению.
На фиг. 7 показан пример изменения нагрузки двигателя посредством регулирования активного механизма натяжения ВСГРП и пример диагностики механизма натяжения на основе изменения нагрузки двигателя.
Осуществление изобретения
Настоящее изобретение относится к системе привода двигателя, содержащей систему встроенного стартер-генератора с ременным приводом (ВСГРП). Пример двигателя внутреннего сгорания, соединенного с системой гибридного транспортного средства, показан на фиг. 1. Система привода двигателя, содержащая систему ВСГРП, показана на фиг. 2. Система ВСГРП может быть соединена посредством ремня с приводом вспомогательного устройства переднего расположения (ПВУПР), содержащего коленчатый вал двигателя и дополнительную нагрузку, как показано на фиг. 3. Один или несколько механизмов натяжения, например, активный механизм натяжения, показанный на фиг. 4, могут использоваться для изменения силы натяжения, приложенной к ременной передаче. Контроллер может выполнять управляющую программу, например, программу, показанную в качестве примера на фиг. 5, для подачи питания на электромагнит активного механизма натяжения во время выбранных условий, например, во время запуска двигателя, что позволяет увеличить силу натяжения, приложенную к ременной передаче и, таким образом, увеличить нагрузку двигателя. Контроллер может также выполнять диагностическую программу, например, программу, показанную в качестве примера на фиг. 6, для диагностики активного механизма натяжения на основе изменения нагрузки двигателя, что может быть измерено посредством одного или нескольких параметров, характеризующих нагрузку двигателя, после подачи питания на электромагнит. Примеры регулировок состояния включения электромагнита механизма натяжения и изменения нагрузки двигателя показаны со ссылкой на пример, изображенный на фиг. 7. Таким образом, за счет надежной диагностики состояния механизма натяжения ВСГРП, можно улучшить эффективность запуска и остановки двигателя.
На фиг. 1 показан двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один из которых показан на фиг. 1, причем управление двигателем осуществляется посредством электронного контроллера 12 двигателя. Двигатель 10 содержит головку 35 цилиндра и блок 33 цилиндров, содержащий камеру 30 сгорания и стенки 32 цилиндра. Поршень 36 расположен в камере сгорания и приводится в движение коленчатым валом 40. Маховик 97 и зубчатый венец 99 соединены с коленчатым валом 40. Опциональный стартер 96 (например, электрическая машина низкого напряжения (работающая под напряжением менее 30 вольт)) содержит вал 98 шестерни и ведущую шестерню 95. Вал 98 шестерни может выборочно выдвигать ведущую шестерню 95 для обеспечения взаимодействия с зубчатым венцом 99. Стартер 96 может быть непосредственно смонтирован на передней стороне двигателя или на задней части двигателя. В некоторых примерах стартер 96 может выборочно передавать крутящий момент на коленчатый вал 40 через ремень или цепь. В одном примере стартер 96 находится в исходном положении, если не взаимодействует с коленчатым валом двигателя. Показано, что камера 30 сгорания может сообщаться с впускным коллектором 44 и с выпускным коллектором 48 посредством впускного клапана 52 и выпускного клапана 54 соответственно. Впускной и выпускной клапаны могут работать с управлением от впускного кулачка 51 и выпускного кулачка 53 соответственно. Положение впускного кулачка 51 может быть определено посредством датчика 55 впускного кулачка. Положение выпускного кулачка 53 может быть определено посредством датчика 57 выпускного кулачка. Впускной клапан 52 может быть выборочно включен и отключен посредством устройства 59 включения клапана. Выпускной клапан 54 может быть выборочно включен и отключен посредством устройства 58 включения клапана. Устройства 58 и 59 включения клапанов могут представлять собой электромеханические устройства.
Показано, что топливный инжектор 66 установлен для впрыска жидкого топлива непосредственно в цилиндр 30, что известно специалистам в данной области как непосредственный впрыск. Топливный инжектор 66 может подавать жидкое топливо пропорционально длительности импульса, получаемого от контроллера 12. Топливо поступает в топливный инжектор 66 через топливную систему (не показанную на схеме), содержащую топливный бак, топливный насос и топливную рампу (не показанные на схеме). Например, для подачи топлива с высоким давлением может быть использована двухступенчатая топливная система высокого давления.
Кроме того, показано, что впускной коллектор 44 связан с компрессором 162 турбонагнетателя и воздухозаборником 42 двигателя. В других примерах компрессор 162 может представлять собой компрессор механического нагнетателя. Вал 161 механически соединяет турбину 164 турбонагнетателя и компрессор 162 турбонагнетателя. Опциональный электронный дроссель 62 выполнен с возможностью регулирования положения дроссельной пластины 64 для управления потоком воздуха от компрессора 162 во впускной коллектор 44. Давление во впускной камере 45 может представлять собой давление на входе дросселя, поскольку вход дросселя 62 расположен в усилительной камере 45. Выход дросселя расположен во впускном коллекторе 44. В некоторых примерах дроссель 62 и дроссельная пластина 64 могут быть расположены между впускным клапаном 52 и впускным коллектором 44 таким образом, чтобы дроссель 62 представлял собой дроссель впускного канала. Перепускной клапан 47 компрессора могут выборочно регулировать посредством установки его во множество положений между полностью открытым положением и полностью закрытым положением. Контроллер 12 может регулировать работу перепускного клапана 163 для выборочного направления отработавших газов в обход турбины 164 для управления частотой вращения компрессора 162. Воздушный фильтр 43 может очищать воздух, поступающий в воздухозаборник 42 двигателя.
Бесконтактная система 88 зажигания выполнена с возможностью создания искры зажигания в камере 30 сгорания посредством свечи 92 зажигания по сигналу контроллера. Универсальный датчик 126 кислорода в отработавших газах (УДКОГ) показан соединенным с выпускным коллектором 48 выше по потоку от каталитического нейтрализатора 70 отработавших газов. В качестве альтернативы, вместо датчика 126 УДКОГ может быть использован бистабильный датчик кислорода в отработавших газах.
Нейтрализатор 70 может содержать, например, несколько блоков каталитического нейтрализатора. В другом примере могут использовать несколько устройств снижения токсичности отработавших газов, каждое со своим набором блоков каталитического нейтрализатора. Например, нейтрализатор 70 может представлять собой трехрежимный каталитический нейтрализатор.
Контроллер 12 показан на фиг. 1 как обычный микрокомпьютер, содержащий: микропроцессорное устройство 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106 (например, долговременную память), оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и обычную шину данных. Показано, что контроллер 12 может принимать различные сигналы от датчиков, присоединенных к двигателю 10, в дополнение к вышеуказанным сигналам, а именно: значение температуры охлаждающей жидкости двигателя (ТОЖД) от датчика 112 температуры, присоединенного к охлаждающей гильзе 114; показания датчика 134 положения, присоединенного к педали 130 акселератора для измерения силы, приложенной ногой 132; показания датчика 154 положения, присоединенного к педали 150 тормоза для измерения силы, приложенной ногой 152; сигнал измеренного давления в коллекторе двигателя (ДВК) от датчика 122 давления, присоединенного к впускному коллектору 44; положение двигателя от датчика 118 на эффекте Холла, имеющего возможность измерять положение коленчатого вала 40; измеренное значение массы воздуха, поступающего в двигатель, от датчика 120; и измеренное положение дросселя от датчика 68. Атмосферное давление также может быть измерено (датчик не показан на схеме) для обработки контроллером 12. В предпочтительном аспекте настоящего изобретения датчик 118 положения двигателя имеет возможность генерировать заранее заданное число равномерно распределенных импульсов на каждый оборот коленчатого вала, на основе чего можно определить частоту вращения двигателя (ЧВД).
Во время эксплуатации каждый цилиндр в двигателе 10 обычно работает по четырехтактному циклу: цикл содержит такт впуска, такт сжатия, такт расширения и такт выпуска. Во время такта впуска, как правило, выпускной клапан 54 закрывают и открывают впускной клапан 52. Воздух подают в камеру 30 сгорания через впускной коллектор 44, причем поршень 36 имеет возможность двигаться к нижней части цилиндра, что увеличивает объем камеры 30 сгорания. Положение, при котором поршень 36 находится около нижней части цилиндра в конце своего хода (например, когда камера 30 сгорания имеет наибольший объем), специалисты в данной области, как правило, называют нижней мертвой точкой (НМТ).
Во время такта сжатия впускной клапан 52 и выпускной клапан 54 закрывают. Поршень 36 имеет возможность двигаться к головке цилиндра, чтобы сжать воздух в камере 30 сгорания. Положение, при котором поршень 36 находится в конце своего хода и расположен ближе всего к головке цилиндра (например, когда камера 30 сгорания имеет наименьший объем), специалисты в данной области, как правило, называют верхней мертвой точкой (ВМТ). В ходе процесса, именуемого в дальнейшем как впрыск, топливо имеет возможность поступать в камеру сгорания. В ходе процесса, именуемого в дальнейшем как зажигание, впрыснутое топливо поджигают каким-либо известным способом, например, посредством свечи 92 зажигания, что приводит к сгоранию.
Во время такта расширения расширяющиеся газы толкают поршень 36 назад к НМТ. Коленчатый вал 40 имеет возможность преобразовывать движение поршня в крутящий момент вращающегося вала. Наконец, во время такта выпуска выпускной клапан 54 открывают для выпуска сгоревшей топливовоздушной смеси в выпускной коллектор 48, и поршень получает возможность вернуться к ВМТ. Обратите внимание, что вышеуказанное является только примером, поскольку времена открытия и закрытия впускного и выпускного клапана могут изменяться, обеспечивая положительные или отрицательные перекрытия периодов работы клапанов, позднее закрытие впускного клапана или различные другие варианты.
На фиг. 2 показана блок-схема транспортного средства 225, содержащая силовой агрегат 200 или система привода. Силовой агрегат, показанный на фиг. 2, содержит двигатель 10, показанный на фиг. 1. Показано, что силовой агрегат 200 содержит контроллер 255 системы транспортного средства, контроллер 12 двигателя, контроллер 252 электромотора, контроллер 254 трансмиссии, контроллер 253 устройства аккумулирования энергии и контроллер 250 тормозов. Контроллеры могут обмениваться информацией по сети контроллеров (СК) 299. Каждый из контроллеров может предоставлять информацию другим контроллерам, например, ограничения на выработку крутящего момента (например, управляемое значение вырабатываемого крутящего момента устройства или компонента, которое не должно быть превышено), ограничения на входной крутящий момент (например, управляемый входной крутящий момент для устройства или компонента, значение которого не должно быть превышено), значение вырабатываемого крутящего момента для управляемого устройства, данные датчика и привода, диагностическую информацию (например, информацию о неисправности трансмиссии, информацию о неисправности двигателя, информацию о неисправности электромотора, информацию о неисправности тормозов). Кроме того, контроллер 255 системы транспортного средства может выдавать команды для контроллера 12 двигателя, контроллера 252 электромотора, контроллера 254 трансмиссии и контроллера 250 тормозов, чтобы выполнить требования, поступающие от водителя, и другие требования, основанные на условиях работы транспортного средства.
Например, в качестве реакции на отпускание водителем педали акселератора, и в зависимости от скорости транспортного средства, контроллер 255 системы транспортного средства может запросить требуемый крутящий момент колес или уровень мощности колес для обеспечения требуемого темпа замедления транспортного средства. Требуемый крутящий момент колес может быть обеспечен контроллером 255 системы транспортного средства, запрашивающим первый тормозной момент от контроллера 252 электромотора и второй тормозной момент от контроллера 250 тормозов, где первый тормозной момент и второй тормозной момент обеспечивают требуемый тормозной момент на колесах 216 транспортного средства.
В других примерах разделение управления устройствами силового агрегата может быть осуществлено иначе, по сравнению с показанным на фиг. 2. Например, вместо контроллера 255 системы транспортного средства, контроллера 12 двигателя, контроллера 252 электромотора, контроллера 254 трансмиссии и контроллера 250 тормозов может быть использован один контроллер. В качестве альтернативы контроллер 255 системы транспортного средства и контроллер 12 двигателя могут представлять собой одно устройство, в то время как контроллер 252 электромотора, контроллер 254 трансмиссии и контроллер 250 тормозов могут представлять собой автономные контроллеры.
В этом примере силовой агрегат 200 может быть приведен в действие двигателем 10. Двигатель 10 может быть запущен с использованием системы запуска двигателя, содержащей встроенный стартер-генератор с ременным приводом (ВСГРП) 219. Как раскрыто со ссылкой на фиг. 3, ВСГРП 219 может быть соединен посредством ремня с приводом 236 вспомогательного устройства переднего расположения (ПВУПР), содержащим коленчатый вал 238 двигателя и дополнительную нагрузку (например, систему кондиционирования воздуха, не показанную на схеме). Кроме того, крутящий момент двигателя 10 могут регулировать посредством исполнительного механизма 204, выполненного с возможностью влияния на крутящий момент, например, посредством топливного инжектора, дросселя и т.д. ВСГРП механически соединен с двигателем 10 посредством ремня 231. ВСГРП может быть соединен с коленчатым валом 40 или с кулачковым валом (например, с валом 51 или валом 53). ВСГРП может работать в качестве мотора, когда на него подают электроэнергию от устройства 275 хранения электрической энергии или аккумулятора 280 низкого напряжения. ВСГРП может работать в качестве генератора, вырабатывающего электроэнергию для устройства 275 хранения электрической энергии или аккумулятора 280 низкого напряжения. Двунаправленный преобразователь 281 переменного напряжения может передавать электрическую энергию от высоковольтной шины 274 к низковольтной шине 273 или наоборот. Аккумулятор 280 низкого напряжения электрически соединен с низковольтной шиной 273. Устройство 275 хранения электрической энергии электрически соединено с высоковольтной шиной 274. Аккумулятор 280 низкого напряжения может выборочно подавать электрическую энергию на мотор 96 стартера.
Выходной крутящий момент двигателя может быть передан через систему привода к колесам 216 транспортного средства для движения транспортного средства 225. В частности, выходной крутящий момент двигателя может быть передан посредством входного вала 237 к гидротрансформатору 206, в котором может быть обеспечено усиление крутящего момента. Двигатель 10 соединен с муфтой 235 расцепления гидротрансформатора силового агрегата. Демпфер 265 может быть расположен между двигателем 10 и муфтой 235 расцепления для уменьшения шума, вибрации и резкости (ШВР), вызванных пульсациями крутящего момента двигателя. Муфта 235 расцепления может иметь электрический или гидравлический привод.
Гидротрансформатор 206 содержит турбину 286 с возможностью создания крутящего момента для приведения в движение вала 270. Входной вал 270 механически соединяет гидротрансформатор 206 с автоматической трансмиссией 208. Гидротрансформатор 206 также содержит обходную блокировочную муфту 212 гидротрансформатора (БМГ). Крутящий момент может быть непосредственно передан от рабочего колеса 285 к турбине 286, когда БМГ выключена. БМГ имеет электрическое управление от контроллера 12. В качестве альтернативы БМГ может быть выключена гидравлическим способом. Например, гидротрансформатор может упоминаться как компонент трансмиссии.
Когда блокировочная муфта 212 гидротрансформатора полностью расцеплена, гидротрансформатор 206 имеет возможность передачи крутящего момента двигателя на автоматическую трансмиссию 208 посредством гидравлической связи между турбиной 286 гидротрансформатора и рабочим колесом 285 гидротрансформатора, обеспечивая, таким образом, умножение крутящего момента. Для сравнения, когда блокировочная муфта 212 гидротрансформатора полностью замкнута, выходной крутящий момент двигателя может быть непосредственно передан через муфту гидротрансформатора на входной вал 270 трансмиссии 208. В качестве альтернативы блокировочная муфта 212 гидротрансформатора может быть частично замкнута, что позволяет регулировать крутящий момент, непосредственно передаваемый к трансмиссии. Контроллер 254 трансмиссии может быть выполнен с возможностью регулирования крутящего момента, передаваемого блокировочной муфтой 212 гидротрансформатора, в зависимости от различных условий работы двигателя или на основе требования водителя по работе двигателя.
Гидротрансформатор 206 также содержит насос 283, который может нагнетать жидкость для управления муфтой 235 расцепления, муфтой 210 переднего хода и зубчатыми муфтами 211. Насос 283 выполнен с приводом от рабочего колеса 285.
Автоматическая трансмиссия 208 содержит зубчатые муфты 211 (например, механизмы передач 1-10) и муфту 210 переднего хода. Автоматическая трансмиссия 208 представляет собой коробку передач с фиксированными передаточными отношениями. Зубчатые муфты 211 и муфта 210 переднего хода могут быть выборочно замкнуты, что позволяет изменять отношение фактического общего количества оборотов входного вала 270 к фактическому общему количеству оборотов колес 216. Зубчатые муфты 211 могут быть замкнуты или расцеплены посредством регулирования количества жидкости, подаваемой к муфтам через электромагнитные клапаны 209, управляющие переключением передач. Вырабатываемый крутящий момент может также быть передан от автоматической трансмиссии 208 к колесам 216 через выходной вал 260, для приведения транспортного средства в движение. В частности, автоматическая трансмиссия 208 может передавать входной приводной крутящий момент на входной вал 270 в зависимости от условий движения транспортного средства, прежде чем передать выходной приводной крутящий момент на колеса 216. Контроллер 254 трансмиссии может выборочно включать или замыкать БМГ 212, зубчатые муфты 211 и муфту 210 переднего хода. Контроллер трансмиссии также может выборочно отключать или расцеплять БМГ 212, зубчатые муфты 211 и муфту 210 переднего хода.
Кроме того, сила трения может быть приложена к колесам 216 при взаимодействии колес с фрикционными тормозами 218 колес. Например, фрикционные тормоза 218 колес могут входить во взаимодействие с колесами в качестве реакции на нажатие ногой водителя педали тормоза (не показанной на схеме) и/или в качестве реакции на инструкции контроллера 250 тормозов. Кроме того, контроллер 250 тормозов может использовать тормоза 218 в качестве реакции на информацию и/или требование от контроллера 255 системы транспортного средства. Таким же образом сила трения может быть уменьшена для колес 216 посредством отключения тормоза 218 колес в качестве реакции на отпускание ногой водителя педали тормоза, на инструкции контроллера тормоза и/или инструкции контроллера системы транспортного средства и/или в зависимости от другой информации. Например, тормоза транспортного средства могут прикладывать силу трения к колесам 216 посредством контроллера 250, в качестве части автоматизированной процедуры остановки двигателя.
В качестве реакции на требование ускорить транспортное средство 225 контроллер системы транспортного средства может получить требование водителя по крутящему моменту или мощности от педали акселератора или другого устройства. Затем контроллер 255 системы транспортного средства распределяет часть требуемого водителем крутящего момента на двигатель и остальную часть на ВСГРП. Контроллер 255 системы транспортного средства требует крутящий момент двигателя от контроллера 12 двигателя и крутящий момент ВСГРП от контроллера 252 электромотора. Если крутящий момент ВСГРП плюс крутящий момент двигателя меньше, чем предел входного крутящего момента трансмиссии (например, пороговое значение, которое не должно быть превышено), то крутящий момент передается на гидротрансформатор 206, который затем передает по меньшей мере часть требуемого крутящего момента на входной вал трансмиссии 270. Контроллер 254 трансмиссии выборочно замыкает блокировочную муфту 212 гидротрансформатора и обеспечивает взаимодействие посредством зубчатых муфт 211 в качестве реакции на шаблоны переключения передач и шаблоны блокировки БМГ, которые могут быть основаны на входном крутящем моменте вала и скорости транспортного средства. При некоторых условиях, когда может потребоваться зарядка устройства 275 хранения электроэнергии, зарядный крутящий момент (например, отрицательный крутящий момент ВСГРП) может быть затребован в то время, когда существует отличное от нуля требование водителя по крутящему моменту. Контроллер 255 системы транспортного средства может запросить увеличение крутящего момента двигателя, чтобы преодолеть зарядный крутящий момент и выполнить требование водителя по крутящему моменту.
В качестве реакции на требование замедлить транспортное средство 225 и обеспечить регенеративное торможение, контроллер системы транспортного средства может обеспечить отрицательный требуемый крутящий момент колес, основанный на скорости транспортного средства и положении педали тормоза. Затем контроллер 255 системы транспортного средства распределяет часть отрицательного требуемого крутящего момента колес на ВСГРП 219 (например, требуемый крутящий момент колес для силового агрегата) и остальную часть распределяет на фрикционные тормоза 218 (например, требуемый крутящий момент колес для фрикционного тормоза). Кроме того, контроллер системы транспортного средства может уведомить контроллер 254 трансмиссии о том, что транспортное средство находится в регенеративном режиме торможения, чтобы контроллер 254 трансмиссии мог переключить передачи посредством зубчатых муфт 211 на основе уникального шаблона переключения передач для увеличения эффективности регенерации. ВСГРП 219 может создавать отрицательный крутящий момент на входном валу 270 трансмиссии, но отрицательный крутящий момент, обеспеченный ВСГРП 219, может быть ограничен контроллером 254 трансмиссии, который обеспечивает ограничение отрицательного крутящего момента на входном валу трансмиссии (например, чтобы не превысить соответствующее пороговое значение). Кроме того, отрицательный крутящий момент ВСГРП 219 может быть ограничен (например, ограничен до меньшего значения, чем пороговое значение отрицательного крутящего момента) на основе условий работы устройства 275 хранения электроэнергии, контроллером 255 системы транспортного средства или контроллером 252 электромотора. Любая часть требуемого отрицательного крутящего момента колес, которая не может быть обеспечена ВСГРП 219 вследствие ограничений для трансмиссии или ВСГРП, может быть назначена для фрикционных тормозов 218 таким образом, чтобы требуемый крутящий момент колес был обеспечен комбинацией отрицательного крутящего момента колес в результате работы фрикционных тормозов 218 и ВСГРП 219.
Соответственно, управление крутящим моментом различных компонентов силового агрегата может осуществляться контроллером 255 системы транспортного средства с отдельным управлением крутящим моментом для двигателя 10, трансмиссии 208, ВСГРП 219 и тормозов 218, что может быть реализовано посредством контроллера 12 двигателя, контроллера 252 электромотора, контроллера 254 трансмиссии и контроллера 250 тормозов.
Например, выработкой крутящего момента двигателя можно управлять посредством регулирования комбинации момента зажигания, длительности импульса впрыска топлива, синхронизации импульса впрыска топлива и/или посредством регулирования заряда воздуха, за счет управления открытием дросселя и/или фазами газораспределения, высотой подъема клапана и наддувом для двигателей с турбокомпрессором или турбонагнетателем. В случае использования дизельного двигателя контроллер 12 может управлять выработкой крутящего момента двигателя, управляя комбинацией длительности импульса впрыска топлива, синхронизацией импульса впрыска топлива и регулирования заряда воздуха. Во всех случаях управление двигателем может быть выполнено на основе управления отдельными цилиндрами для управления выработкой крутящего момента двигателя.
Контроллер 252 электромотора может управлять выработкой крутящего момента и выработкой электроэнергии от ВСГРП 219 посредством регулирования тока, протекающего к обмоткам возбуждения и/или обмоткам якоря ВСГРП, а также тока, протекающего от обмоток возбуждения и/или обмоток якоря ВСГРП, как известно в данной области техники.
Контроллер 254 трансмиссии может получать данные о положении входного вала трансмиссии посредством датчика 271 положения. Контроллер 254 трансмиссии может преобразовать положение входного вала трансмиссии в частоту вращения входного вала посредством дифференцирования сигнала датчика 271 положения или подсчета количества импульсов, разделенных известным угловым расстоянием, в течение заранее заданного интервала времени. Контроллер 254 трансмиссии может получать данные о крутящем моменте выходного вала трансмиссии от датчика 272 крутящего момента. В качестве альтернативы датчик 272 может представлять собой датчик положения или датчик положения и крутящего момента. Если датчик 272 представляет собой датчик положения, то контроллер 254 может подсчитать количество импульсов положения вала в течение заранее заданного интервала времени для определения частоты вращения выходного вала трансмиссии. Контроллер 254 трансмиссии может также дифференцировать частоту вращения выходного вала трансмиссии для определения ускорения выходного вала трансмиссии. Контроллер 254 трансмиссии, контроллер 12 двигателя и контроллер 255 системы транспортного средства могут также получить дополнительную информацию о трансмиссии от датчиков 277, которые могут содержать, но без ограничения этим списком, датчики давления выходной линии насоса, датчики гидравлического давления в трансмиссии (например, датчики давления жидкости в зубчатых муфтах), датчики температуры ВСГРП и датчики температуры окружающей среды.
Контроллер 250 тормозов может получать информацию о частоте вращения колес посредством датчика 221 частоты вращения колес и может получать запросы на торможение от контроллера 255 системы транспортного средства. Контроллер 250 тормозов может также получать информацию о положении педали тормоза от датчика 154 педали тормоза, показанного на фиг. 1 непосредственно или через СК 299. Контроллер 250 тормозов может обеспечить торможение в качестве реакции на заданное командой значение крутящего момента колес от контроллера 255 системы транспортного средства. Контроллер 250 тормозов может также обеспечить противоскользящее торможение и торможение с обеспечением устойчивости транспортного средства для улучшения торможения транспортного средства и его устойчивости. Таким образом, контроллер 250 тормозов может обеспечить ограничение крутящего момента колес (например, пороговое значение отрицательного крутящего момента колес, которое не должно быть превышено) для контроллера 255 системы транспортного средства таким образом, чтобы отрицательный крутящий момент ВСГРП не приводил к превышению предела крутящего момента колес. Например, если контроллер 250 выдает предельное значение отрицательного крутящего момента колес, равное 50 Н⋅м, то крутящий момент ВСГРП регулируют таким образом, чтобы обеспечить значение, меньшее 50 Н⋅м (например, 49 Н⋅м) для отрицательного крутящего момента колес, в том числе, с учетом включенной передачи в трансмиссии.
Таким образом, система, показанная на фиг. 1 и 2, иллюстрирует систему, содержащую: двигатель; трансмиссию, соединенную с двигателем; мотор-генератор, соединенный с двигателем посредством ремня; муфту расцепления, расположенную в системе привода между двигателем и гидротрансформатором; устройство хранения электрической энергии, имеющее электрическую связь с мотор-генератором ВСГРП; и контроллер системы транспортного средства, содержащий исполняемые инструкции, сохраненные в долговременной памяти в постоянном запоминающем устройстве (ПЗУ).
На фиг. 3 показан пример схемы 300 системы ВСГРП. В одном примере система ВСГРП содержит ВСГРП 219, соединенный с ПВУПР 236, показанным на фиг. 2. Система 300 ВСГРП может представлять собой устройство ременной передачи для двигателя в системе гибридного транспортного средства.
Система 300 ВСГРП содержит единственный приводной ремень 331 ПВУПР, который соединен, с обеспечением трения, со шкивом 303 ВСГРП, входящим в состав ВСГРП 330, а также со шкивом 301 коленчатого вала, входящим в состав коленчатого вала 332 двигателя. Ремень 331 также соединен, с обеспечением трения, со шкивом для дополнительной нагрузки двигателя, здесь изображенным в качестве шкива 302 муфты ВК, входящего в состав системы 334 воздушного кондиционера (ВК).
Приводной ремень 331 может представлять собой ремень на основе полиэфирного волокна. В некоторых примерах материал ремня может быть заменен на ремень на основе кевларового волокна. В отличие от генератора переменного тока, ВСГРП 330 выполнен с возможностью выработки как положительного, так и отрицательного крутящего момента. Кроме того, ВСГРП может работать как более мощный генератор (например, с мощностью 4 кВт или 2 кВт) и может вырабатывать значительный положительный крутящий момент. В результате, увеличивается натяжение ремня ПВУПР, когда генератор переменного тока заменяют на ВСГРП. Увеличение натяжения ремня ПВУПР может привести к увеличению боковой нагрузки от шкива 301 коленчатого вала на подшипники скольжения коленчатого вала. Это может потребовать замену подшипников скольжения коленчатого вала для обеспечения большей нагрузки, а также может потребоваться замена материала ремня (например, на кевларовое волокно).
Приводной ремень 331 содержит один или несколько механизмов натяжения для изменения натяжения ремня в то время, когда изменяются нагрузки и крутящий момент, приложенные к ременной передаче. В зависимости от того, приводит ли ремень в движение другие устройства, или приводится в движение за счет внешнего воздействия, и дополнительно на основе крутящего момента, передаваемого через шкив (шкив коленчатого вала или шкив ВСГРП), может изменяться сила натяжения ремня, образуя провисающую сторону и натянутую сторону. Например, рассмотрим первый участок 315 приводного ремня 331 (между шкивом 301 коленчатого вала и шкивом 303 ВСГРП) относительно второго участка 316 приводного ремня 331 (между шкивом 303 ВСГРП и шкивом 302 муфты ВК). Когда крутящий момент передают от шкива 303 ВСГРП для вращения шкива 301 коленчатого вала, например, когда ВСГРП находится в режиме мотора, второй участок 316 подвергается действию меньшей силы натяжения (на основе направления вращения, показанного на фиг. 3), чем первый участок 315. Во время этих условий один или несколько механизмов натяжения могут использоваться для приложения силы натяжения на первом участке 315 или для снижения силы натяжения на втором участке 316. Для сравнения, когда крутящий момент передают от шкива 301 коленчатого вала для вращения шкива 303 ВСГРП, например, когда ВСГРП находится в режиме генератора, первый участок 315 подвергается действию меньшей силы натяжения (на основе направления вращения, показанного на фиг. 3), чем второй участок 316. Во время этих условий один или несколько механизмов натяжения могут использоваться для приложения силы натяжения на втором участке 316 или для снижения силы натяжения на первом участке 315.
Согласно одному примеру, приводной ремень 331 может содержать пассивный механизм 306 натяжения. Таким образом, пассивные механизмы натяжения выполнены с возможностью устранения слабины на всех сегментах приводных ремней, в то время как другие натяжные элементы, содержащие холостые шкивы, колеса или активные механизмы натяжения, могут устранять слабину в выбранные периоды времени работы на других сегментах приводного ремня. Пассивные механизмы натяжения содержат пружину со встроенным демпфером. Пассивный механизм 306 натяжения содержит линейную пружину 310 (или демпфер), присоединенную к ведущему шкиву 313, выполненному с возможностью приведения в движения приводного ремня 331 и холостого шкива 314. Пассивный механизм натяжения может быть смонтирован на компоненте двигателя с использованием холостого шкива 314 для устранения слабины на втором участке 316 ремня ПВУПР в то время, когда ВСГРП обеспечивает положительный или отрицательный крутящий момент. В других примерах может использоваться ротационный пружинный демпфер. Пассивный механизм 306 натяжения соединен с приводным ремнем 331 между шкивом 302 муфты ВК и шкивом 303 ВСГРП. Пружина 310 может прикладывать регулирующую силу, сдвигающую пружину 310 в направлении, в котором ведущий шкив 313 может оказывать давление или вращаться относительно ремня 331, что позволяет поглощать любое изменение силы натяжения второго участка 316 приводного ремня.
Приводной ремень 331 дополнительно содержит активный механизм 305 натяжения. Таким образом, изображенный вариант осуществления содержит несколько натяжных устройств в отличие от обычных систем ПВУПР, которые содержат генератор переменного тока и имеют единственный механизм натяжения на стороне ослабления для генератора переменного тока. Следует учитывать, что в альтернативных вариантах осуществления приводной ремень может содержать единственное реверсивное натяжное устройство. В изображенном примере активный механизм натяжения имеет электрический привод, хотя следует учитывать, что в альтернативных вариантах осуществления механизм натяжения может иметь гидравлический или пневматический привод. Активный механизм 305 натяжения может поддерживать меньшую силу натяжения или управлять меньшей силой натяжения, когда крутящий момент ВСГРП ниже порогового крутящего момента, за счет приведения в действие устройства до увеличения крутящего момента и за счет того, что пульсации процесса сгорания в двигателе приводят к выдвижению активного механизма натяжения до увеличения заданного командой крутящего момента. В одном примере, во время работы двигателя на холостом ходу и до момента остановки двигателя, привод может быть выдвинут для увеличения натяжения ремня и, таким образом, механизм натяжения может поддерживать свое выдвинутое состояние во время выключения двигателя. Таким образом, при перезапуске двигателя можно поддерживать натяжение ремня или уменьшить натяжение ремня в зависимости от состояния крутящего момента ВСГРП. Например, натяжение ремня могут уменьшить посредством отключения механизма натяжения, когда ВСГРП находится в состоянии низкого крутящего момента. В другом примере могут поддерживать натяжение ремня посредством включения механизма натяжения, когда ВСГРП работает в состоянии высокого крутящего момента. В качестве альтернативы активный механизм 305 натяжения может также работать с более высокой силой натяжения, когда положительный или отрицательный крутящий момент ВСГРП ниже одного или нескольких пороговых значений крутящего момента. Таким образом, положительные и отрицательные пороговые значения крутящего момента могут отличаться, и функция рабочего состояния двигателя содержит частоту вращения двигателя, нагрузку и тепловой режим ПВУПР. Кроме того, степень натяжения ремня может представлять собой функцию требуемого максимального крутящего момента ВСГРП или режимов положительных или отрицательных крутящих моментов. Кроме того, натяжение ремня может зависеть от других факторов, например, тепловое состояние ремня и шкива может ограничивать максимальный крутящий момент, который может передавать ремень.
Активный механизм 305 натяжения выполнен с возможностью изменения силы натяжения для первого участка 315 приводного ремня 331, расположенного между шкивом 301 коленчатого вала двигателя и шкивом 303 ВСГРП. Активные механизмы натяжения могут активным образом или автоматически взаимодействовать с приводным ремнем 331. Активный механизм 305 натяжения содержит холостой шкив 312, сдвигающий механизм, изображенный в настоящем документе в качестве пружины 307, поршень, соединенный с нижней камерой 319 и электромагнит 317. Электромагнит 317 соединен с контроллером 12 двигателя и может быть включен или обесточен в зависимости от управляющего сигнала, полученного от контроллера 12. Пружина 307 соединена с холостым шкивом 312 посредством монтажной конструкции 321 и соединена с компонентом двигателя (например, с трансмиссией, выпускным коллектором и т.д.) посредством верхней монтажной конструкции 320. В результате включения электромагнита 317 масло может быть перемещено из верхней камеры 318 в нижнюю камеру 319, что позволяет зафиксировать положение поршня активного механизма натяжения, как показано на фиг. 4. Компонент 308 используется для ограничения движения от одной стороны к другой стороне холостого шкива 312 и оси 322 шкива. В дополнение, треугольная структура удерживает вместе компонент 308, холостой шкив 312 и нижнюю монтажную конструкцию 321, и используется для ограничения движения холостого шкива 312 и оси 322 шкива.
В изображенном примере активный механизм 305 натяжения представляет собой электрогидравлический механизм натяжения, выполненный с возможностью управления посредством включения электромагнита 317. Когда электромагнит обесточен, активный механизм 305 натяжения ведет себя как пассивный линейный гидравлический демпфер, позволяющий гидравлической жидкости перемещаться от одной стороны поршня в нижней камере 319 к другой стороне, в зависимости от разности давлений на сторонах поршня.
Таким образом, во время запуска двигателя, когда начальный крутящий момент приложен к ремню 331 посредством шкива 303 ВСГРП, вследствие работы ВСГРП 330 в режиме мотора и начального крутящего момента, передаваемого для вращения шкива 301 коленчатого вала, второй участок 316 испытывает меньшую силу натяжения (на основе направления вращения, показанного на фиг. 3), чем первый участок 315. Для увеличения силы натяжения на ослабленной стороне (на первом участке 315) электромагнит 317 активного механизма 305 натяжения включают для выдвижения пружины 307, и в результате холостой шкив 312 выдвигается в рабочее взаимодействие с первым участком 315 приводного ремня 331. После того, как двигатель запущен, например, когда крутящий момент, передаваемый через шкив 301 коленчатого вала, обеспечивает увеличение частоты вращения двигателя до значения, превышающего пороговую частоту вращения (например, 400 об/мин), крутящий момент для запуска двигателя убирают с ремня 331 посредством отключения ВСГРП 330. В это время электромагнит 317 отключают, и в результате пружина 307 втягивается, что приводит к отводу холостого шкива 312 из рабочего взаимодействия с первым участком 315, что уменьшает силу натяжения на этом участке ремня.
Во время условий, когда двигатель создает избыточный крутящий момент, и избыточный крутящий момент используют для работы ВСГРП 330 в режиме мотора (для заряжания аккумулятора), крутящий момент для мотора передают ремню 331 посредством шкива 301 коленчатого вала для вращения шкива 303 ВСГРП. Вследствие вращения ВСГРП 330 посредством двигателя первый участок 315 испытывает большую силу натяжения, чем второй участок 316. Пассивный механизм натяжения 306 автоматически увеличивает силу натяжения на стороне ослабления (на втором участке 316). В частности, пружина 310 сдвигает холостой шкив 313 в рабочее взаимодействие со вторым участком 316 ремня 331. В дополнение, электромагнит 317 активного механизма 305 натяжения отключают для того, чтобы пружина 307 была втянута, и в результате холостой шкив 312 отводится из рабочего взаимодействия с первым участком 315 приводного ремня 331.
Выборочное выдвижение и втягивание активного механизма натяжения позволяет увеличить срок службы ремня 331, так как срок службы ремня обратно пропорционален приложенной к ремню максимальной силе натяжения.
На фиг. 4 показан пример работы активного механизма натяжения ВСГРП в составе ПВУПР. На фиг. 4 показан вариант осуществления активного механизма 400 натяжения с одноходовыми расходными отверстиями в фиксированном положении. Компоненты, раскрытые ранее на фиг. 3, пронумерованы таким же образом и повторно не упоминаются.
Активный механизм 400 натяжения может представлять собой электрогидравлический активный механизм натяжения с приводом от электромагнита 317 (показанного в виде черной стрелки). Электромагнит 317 включают или обесточивают по сигналу от контроллера двигателя. Механизм 400 натяжения содержит корпус 402, выполненный с возможностью получения гидравлической жидкости, например, масла. Пространство внутри корпуса 402 разделено на нижнюю камеру 319, внутри которой может перемещаться поршень 401, и верхнюю камеру 318. Движение поршня определяется давлением масла на обоих сторонах поршня. Таким образом, когда давление в верхней камере 318 будет выше, чем в нижней камере 319, масло будет вытекать из верхней камеры 318 в нижнюю камеру 319. Пневматическая распорка 410 расположена внутри верхней камеры 318 для уменьшения кавитации. Приведение в действие поршня обеспечивает натяжение части механизма натяжения, например, спиральной пружины (не показанной на схеме). Спиральная пружина обычно расположена на наружной поверхности корпуса 402 и проходит вдоль верхней камеры и нижней камеры. Масло может перемещаться из верхней камеры 318 в нижнюю камеру 319 через первое пропускное отверстие 408 и из нижней камеры в верхнюю камеру через второе пропускное отверстие 409. Пропускные отверстия 408 и 409 оборудованы однонаправленными запорными клапанами, позволяющими текучей среде перемещаться только в одном направлении, то есть, из верхней камеры в нижнюю камеру для первого отверстия 408 и из нижней камеры в верхнюю камеру для второго отверстия 409. Кроме того, второе пропускное отверстие 409 оборудовано электромагнитом, выполненным с возможностью блокирования движения потока, когда электромагнит включен. После включения электромагнита 317 масло не может перемещаться из нижней камеры в верхнюю камеру, что препятствует втягиванию механизма натяжения и разрешает выдвижение механизма натяжения.
Когда выполняют проворачивание двигателя посредством ВСГРП (например, при частотах вращения двигателя от 0 об/мин до приблизительно 400 об/мин), натяжение ремня, возможно, должно быть увеличено в области ремня между шкивом коленчатого вала и шкивом ВСГРП. Для увеличения силы натяжения в этой области ремня могут включить электромагнит 317 для блокирования движения масла в нижней камере 319 через второе пропускное отверстие 409 и в верхнюю камеру 318. Эта более высокая сила натяжения позволяет передать положительный крутящий момент от ВСГРП, работающего в качестве мотора, для проворачивания двигателя. В одном примере, во время вращения двигателя, пульсации процесса сгорания могут вызвать вибрацию в ремне ПВУПР, что приведет к пульсации силы, приложенной к монтажной конструкции 321 и к оси 322 шкива. Эта пульсирующая сила вызывает увеличение давления активного механизма натяжения. Если механизм натяжения находится в отключенном состоянии, то нижняя монтажная конструкция 321 может совершать колебания вверх и вниз относительно верхней монтажной конструкции 320. Однако, если привод находится во включенном состоянии, то движение жидкости ограничивается, и, таким образом, предотвращается сжатие. Таким образом, нижняя монтажная конструкция 321 сможет отодвинуться от верхней монтажной конструкции 320, то есть, произойдет выдвижение. Поток текучей среды через клапаны из верхней камеры 318 в нижнюю камеру 319 зависит от места расположения запорных клапанов относительно поршня, то есть, зависит от того, расположены ли клапаны внутри поршня или выше поршня.
После того как частота вращения двигателя достигает пороговой частоты вращения, и ВСГРП больше не требуется для проворачивания двигателя, электромагнит могут обесточить, в результате чего распределительный клапан возвращается к своему положению по умолчанию, которое позволяет маслу проходить через первое пропускное отверстие 408 и второе пропускное отверстие 409. Поршень 401 втягивается, и шкив ВСГРП перемещается в направлении от ремня, уменьшая, таким образом, силу натяжения на ременном приводе.
Таким образом, когда электромагнит не включен, механизм натяжения работает как пассивный линейный гидравлический демпфер, позволяющий гидравлической жидкости перемещаться от одной стороны поршня к другой стороне в зависимости от разности давлений на сторонах поршня. В отличие от типичного демпфера, имеющего единственное отверстие, обеспечивающее прохождение текучей среды через поршень в зависимости от разности давлений на сторонах поршня, активный механизм 400 натяжения использует два отдельных пути для прохождения текучей среды. Второе направление 409 потока текучей среды могут заблокировать, когда включают электромагнит, а в другом направлении 408 используется шаровой запорный клапан, обеспечивающий прохождение текучей среды только от верхней стороны поршня, то есть, из верхней камеры, к нижней стороне поршня, то есть, в нижнюю камеру. Когда включают электромагнит, арматура смещается таким образом, чтобы заблокировать поток текучей среды от нижней стороны поршня к верхней стороне поршня, и шаровой запорный клапан во втором пропускном отверстии обеспечивает только прохождение текучей среды из верхней камеры в нижнюю камеру. Поэтому, когда включают электромагнит, исполнительный механизм не может втянуться, но может только выдвигаться.
За счет запрещения втягивания исполнительного механизма можно увеличить эффективную силу натяжения ремня, особенно во время переходного процесса по крутящему моменту. Кроме того, если электромагнит включен во время вращения двигателя, то пульсации крутящего момента двигателя в результате сжатия или сгорания создают пульсации крутящего момента в ремне ПВУПР, которые, в свою очередь, создают пульсацию силы на активном механизме натяжения, что приводит к колебаниям давления в поршне исполнительного механизма. Если электромагнит поршня исполнительного механизма будет включен, тогда текучая среда будет перетекать от верхней стороны поршня к нижней стороне, приводя к выдвижению исполнительного механизма, что приведет к увеличению силы натяжения ремня ПВУПР. Может существовать несколько условий, которые могут привести к неисправности активного механизма натяжения. Например, ухудшение механизма натяжения может произойти вследствие присутствия инородных примесей в масле, появившихся в результате процесса производства или износа в течение некоторого времени. В другом примере может произойти ухудшение характеристик уплотнения гидравлического масла, что может стать причиной утечки текучей среды и, следовательно, потере работоспособности механизма натяжения. В другом примере проблема может заключаться в электрической части электромагнита. В другом примере электромагнит может оказаться неспособным возвратиться в исходное положение. Если ухудшение исполнительного механизма происходит во втянутом состоянии, то исполнительный механизм будет функционировать как пассивный демпфер. Поскольку активный механизм натяжения разработан для обеспечения работы ремня ПВУПР при более низкой силе натяжения, в выключенном состоянии, такая работа может стать причиной чрезмерного проскальзывания ремня, особенно во время событий прокручивания двигателя и усиления крутящего момента, что может привести к уменьшению срока службы ремня ПВУПР. Если возникает неисправность исполнительного механизма во включенном состоянии или в выдвинутом состоянии, то исполнительный механизм будет функционировать с высоким натяжением ремня ПВУПР при всех условиях. Увеличенное натяжение ремня может привести к более высоким средним боковым нагрузкам на шкиве коленчатого вала, и это может привести к увеличению трения в двигателе, и, таким образом, увеличенному расходу топлива, а также к увеличению износа двигателя и ремня ПВУПР.
Во время выбранных условий, например, когда двигатель работает в установившемся режиме, и крутящий момент ВСГРП равен нулю или приблизительно равен нулю (например, после запуска посредством ключа в то время, когда трансмиссия находится в режиме парковки, или когда двигатель работает в режиме холостого хода перед выключением двигателя), механизм натяжения могут активным образом привести в действие, с переключением в выдвинутое состояние, и отслеживать в течение некоторого времени один или несколько параметров, относящихся к крутящему моменту двигателя, для обнаружения увеличения нагрузки двигателя. Если увеличение нагрузки двигателя не наблюдается, могут указать на неисправность активного механизма натяжения, что позволяет выполнить своевременное техническое обслуживание механизма натяжения.
Следует учитывать, что, в то время как на фиг. 4 раскрыт активный механизм натяжения с двумя пропускными отверстиями, имеющими постоянное местоположение, в альтернативном примере активный механизм натяжения может быть разработан с двумя отверстиями, расположенными на поршне, выполненном с возможностью движения. В такой конструкции механизм натяжения содержит первое пропускное отверстие, имеющее однонаправленный запорный клапан, обеспечивающий перетекание масла из нижней камеры в верхнюю камеру, и второе пропускное отверстие, имеющее однонаправленный запорный клапан и электромагнит, который обеспечивает перетекание масла только из верхней камеры в нижнюю камеру, когда электромагнит отключен, и препятствует перетеканию масла из верхней камеры в нижнюю камеру, когда электромагнит включен. Таким образом, когда включают электромагнит, могут поддерживать выдвинутое состояние механизма натяжения, поскольку путь для прохождения текучей среды из верхней камеры в нижнюю камеру блокирован. Важно отметить, что, такая конструкция требует установки клапанов (и размещения отверстий) внутри поршня, выполненного с возможностью движения, что затрудняет создание проводного соединения, поскольку такое соединение может отрицательно повлиять на долговечность конструкции и может усложнить ее производство.
На фиг. 3 и 4 показаны примеры вариантов реализации с относительным расположением различных компонентов. Если показано, что эти компоненты непосредственно соприкасаются друг с другом или непосредственно соединены, то такие элементы могут упоминаться как находящиеся в прямом контакте или непосредственно соединенные по меньшей мере в качестве примера. Точно так же элементы, показанные близлежащими или смежными, могут быть близлежащими или смежными по меньшей мере в качестве примера. Например, компоненты, расположенные в поверхностном контакте друг с другом, могут упоминаться, как имеющие поверхностный контакт. В другом примере элементы, расположенные отдельно друг от друга, зазором между ними и без каких-либо других компонентов, могут быть упомянуты как таковые, только в качестве примера. В другом примере элементы, показанные расположенными выше/ниже друг друга, на противоположных сторонах относительно друг друга или справа/слева друг от друга, могут быть упомянуты как таковые, относительно друг друга. Кроме того, как показано на иллюстрациях, самый верхний элемент или самая верхняя точка элемента могут упоминаться как «верх» указанного компонента, а самый нижний элемент или самая нижняя точка элемента могут упоминаться как «низ» указанного компонента, по меньшей мере в качестве примера. Используемые в настоящем документе термины верх/низ, верхний/нижний, выше/ниже могут указываться относительно вертикальной оси на чертежах и применяться для указания положения элементов относительно друг друга на чертежах. Например, элементы, показанные выше других элементов, расположены выше других элементов по вертикали. В другом примере формы элементов, изображенных на чертежах, могут быть указаны как таковые (например, элементы, являющиеся круглыми, прямыми, плоскими, изогнутыми, скругленными, скошенными, угловыми и т.п.). Кроме того, элементы, показанные в пересечении друг с другом, могут быть указаны как пересекающиеся элементы или пересекающиеся друг с другом, по меньшей мере в одном примере. Кроме того, элемент, показанный внутри другого элемента или показанный за пределами другого элемента, может быть упомянут как таковой, только в качестве примера.
На фиг. 5 показан пример программы 500, которая может быть выполнена контроллером для включения электромагнита активного механизма натяжения во время выбранных условий, например, во время проворачивания двигателя, для увеличения силы натяжения, прикладываемой к ременной передаче, что позволяет увеличить нагрузку двигателя. Инструкции для выполнения способа 500 и других раскрытых в настоящем документе способов могут быть выполнены контроллером на основе инструкций, сохраненных в памяти контроллера, и совместно с сигналами, полученными от датчиков системы двигателя, например, от датчиков, раскрытых выше со ссылкой на фиг. 1-2. Контроллер может использовать приводы двигателя в системе двигателя для регулирования работы двигателя в соответствии с раскрытыми ниже способами.
На шаге 502 могут оценить или определить условия работы двигателя. Эти условия могут содержать, например, частоту вращения двигателя, требование водителя по крутящему моменту, внешние условия (например, температуру и влажность окружающей среды, и атмосферное давление), давление воздуха в коллекторе (ДВК), массовый расход воздуха (МРВ), температуру воздуха в коллекторе (ТВК), температуру двигателя, уровень наддува и т.д.
На шаге 504 могут определить, используя оцененные условия работы, требуется ли запуск двигателя. Запуск двигателя может потребовать водитель, на основе события использования ключа водителя (например, когда водитель вставляет ключ в замок зажигания или использует кнопку «Пуск»). В некоторых примерах контроллер двигателя может автоматически затребовать запуск двигателя в условиях останова или холостого хода, например, в качестве реакции на низкий уровень заряда аккумулятора или на требование кондиционирования воздуха. Если запуск двигателя не подтвержден, способ переходит к шагу 506 для поддержания остановленного состояния двигателя. Затем программа заканчивает свою работу.
На шаге 508, после подтверждения условий запуска двигателя, способ содержит включение электромагнита активного механизма натяжения, соединенного с приводным ремнем, для перевода механизма натяжения в выдвинутое состояние. Активный механизм натяжения может соединяться через холостой шкив с участком приводного ремня ПВУПР между шкивом коленчатого вала (соединенным с коленчатым валом двигателя) и шкивом ВСГРП (соединенным с ВСГРП). В результате подачи питания на электромагнит для перевода активного механизма натяжения в выдвинутое состояние увеличивается сила натяжения на ремне ПВУПР за счет работы ВСГРП. На шаге 510 способ дополнительно содержит работу ВСГРП в режиме мотора для приложения положительного крутящего момента к ременной передаче ПВУПР, что позволяет выполнить проворачивание двигателя. Например, контроллер может отправить сигнал, соответствующий коэффициенту заполнения, на мотор ВСГРП для вращения ВСГРП, использующего электрическую энергию от системного аккумулятора, в результате чего крутящий момент ВСГРП передается на коленчатый вал двигателя через приводной ремень (и через шкивы ВСГРП и коленчатого вала). В одном примере мотор ВСГРП может работать с коэффициентом заполнения 100% для ускорения проворачивания двигателя.
На шаге 512 могут определить, выше ли частота вращения двигателя (ЧВД), чем пороговая частота вращения. Например, могут определить, больше ли частота вращения двигателя, обеспеченная положительным крутящим моментом ВСГРП, заранее заданной пороговой частоты вращения, например, больше 400 об/мин. Если частота вращения двигателя больше пороговой частоты вращения, то двигатель может обеспечить вращение посредством сгорания топлива в цилиндрах. Если пороговая частота вращения двигателя порога не была достигнута, то на шаге 514 программа продолжает выполнять проворачивание двигателя за счет крутящего момента мотора, полученного от ВСГРП, до тех пор, пока частота вращения двигателя не превысит заранее заданную пороговую частоту вращения. В дополнение, поддерживают выдвинутое состояние активного механизма натяжения.
Когда частота вращения двигателя начинает превышать пороговую частоту вращения, способ может перейти к шагу 516. На шаге 516 способ содержит обесточивание механизма натяжения таким образом, чтобы механизм натяжения вернулся к своему втянутому состоянию, уменьшив силу натяжения, приложенную механизмом натяжения к ремню ПВУПР на участке между шкивом коленчатого вала и шкивом ВСГРП. Например, контроллер может прекратить подачу электрического сигнала на электромагнит. На шаге 518 способ содержит возобновление подачи топлива и обеспечение зажигания для цилиндров двигателя таким образом, чтобы сгорание топлива в цилиндрах могло использоваться для поддержания вращения двигателя.
После использования ВСГРП для проворачивания двигателя ВСГРП может работать в режиме добавления мощности или в режиме генератора, в зависимости от условий работы двигателя. В режиме добавления мощности требования водителя по крутящему моменту могут быть выше, чем доступный крутящий момент двигателя. Таким образом, во время этих условий, положительный крутящий момент может быть получен от ВСГРП для дополнения крутящего момента двигателя, чтобы выполнить требования по крутящему моменту. В это время крутящий момент ВСГРП добавляют к крутящему моменту двигателя. В одном примере после завершения операции запуска транспортного средства ВСГРП может работать в режиме добавления мощности и может создавать положительный крутящий момент, когда транспортное средство ускоряется вследствие большего нажатия педали акселератора или когда транспортное средство движется на подъеме. В режиме генератора крутящий момент двигателя превышает требование водителя по крутящему моменту. В качестве альтернативы ВСГРП может работать в режиме генератора, когда уровень заряда системного аккумулятора меньше порогового уровня. Во время этих условий отрицательный крутящий момент может быть получен от ВСГРП для использования крутящего момента двигателя для заряжания аккумулятора. В этом случае двигатель может вращать мотор ВСГРП. ВСГРП может работать в режиме генератора, что позволяет подавать электроэнергию к устройству хранения электрической энергии и генерировать отрицательный крутящий момент, когда транспортное средство движется под уклон или замедляется (например, во время рекуперативного торможения).
На шаге 520 могут определить, больше ли абсолютный крутящий момент ВСГРП, который может представлять собой положительный или отрицательный крутящий момент, чем пороговый крутящий момент. В одном примере пороговый крутящий момент основан на максимальном требуемом крутящем моменте для дополнения крутящего момента двигателя. Если положительный или отрицательный крутящий момент ВСГРП меньше порогового крутящего момента, то способ переходит к шагу 522, на котором переводят активный механизм натяжения во втянутое состояние и прикладывают уменьшенный крутящий момент от ВСГРП к ременной передаче ПВУПР. Например, отключают электромагнит активного механизма натяжения (если он был включен) для перевода механизма натяжения во втянутое состояние. Если крутящий момент ВСГРП больше порогового крутящего момента, то на шаге 524 электромагнит включают для перевода механизма натяжения в выдвинутое состояние и, в зависимости от режима функционирования ВСГРП, прикладывают положительный или отрицательный крутящий момент от ВСГРП к ременной передаче ПВУПР.
На шаге 526 могут определить, истек ли пороговый период времени работы двигателя или работы транспортного средства (или расстояние, на которое переместилось транспортное средство), начиная с момента последней диагностики механизма натяжения. Механизм натяжения могут периодически диагностировать для того, чтобы гарантировать его функциональность и увеличить срок службы компонентов и, таким образом, улучшить эффективность функционирования двигателя. Если пороговый период времени не истек, то на шаге 528 поддерживают работу механизма натяжения, и программа может завершить свою работу. Например, механизм натяжения могут поддерживать в выдвинутом состоянии, когда крутящий момент ВСГРП выше, и могут перевести во втянутое состояние, когда крутящий момент ВСГРП ниже.
Если пороговый период времени истек, то на шаге 530 способ содержит диагностику механизма натяжения. Как раскрыто со ссылкой на фиг. 6, диагностика активного механизма натяжения содержит перевод механизма натяжения в выдвинутое состояние во время условий, когда крутящий момент ВСГРП равен нулю или приблизительно равен нулю. Затем на основе изменения нагрузки двигателя, после перевода механизма натяжения в выдвинутое состояние, могут выполнить диагностику механизма натяжения. В частности, отсутствие увеличения нагрузки двигателя после перевода механизма натяжения в выдвинутое состояние может указать на неисправность механизма натяжения (например, механизм натяжения застрял во втянутом состоянии).
На фиг. 6 показан пример способа 600 диагностики активного механизма натяжения системы ПВУПР с ременной передачей, выполняемой на основе изменения нагрузки двигателя. Способ позволяет выполнить диагностику активного механизма натяжения, что дает возможность своевременно обнаружить и устранить неисправность.
На шаге 602 могут определить, выполнены ли условия для начала диагностики активного механизма натяжения. В одном примере условия диагностики считаются выполненными, если истек пороговый период времени, начиная с момента последней диагностики механизма натяжения. Таким образом, условия диагностики, оцененные на шаге 602, содержат начальные условия для диагностической программы (которые отличаются от условий выполнения диагностической программы). Если условия не выполнены, то на шаге 604 задерживают выполнение диагностики механизма натяжения. Таким образом, выполнение способа, показанного на фиг. 6, могут начать заново в более позднее время.
Если начальные условия выполнены, то на шаге 606 способ содержит определение, соблюдены ли условия для выполнения диагностической программы. Например, могут определить, находятся ли внутри целевого диапазона частота вращения и крутящий момент двигателя, а также крутящий момент ВСГРП. В одном примере можно считать, что условия выполнения диагностической программы соблюдены, когда двигатель работает в установившемся режиме. В качестве альтернативы можно считать, что условия диагностической программы соблюдены, когда двигатель работает в диапазоне минимально возможной частоты вращения и минимально возможного крутящего момента (например, когда двигатель работает на холостом ходу с включенной нейтральной передачей). В дополнение, могут подтвердить, что крутящий момент ВСГРП равен нулю или приблизительно равен нулю, при этом значение крутящего момента устанавливает исходный уровень для минимальных условий натяжения ремня ПВУПР. Таким образом, программу выполняют, когда ВСГРП не работает ни в режиме мотора, ни в режиме генератора. В одном примере диагностическую программу могут выполнить после запуска двигателя посредством ключа, когда трансмиссия находится в режиме парковки, или в то время, когда двигатель работает на холостом ходу, или во время режима управления частотой вращения двигателя перед выключением двигателя. Например, программу могут выполнить во время работы двигателя на холостом ходу, во время режима «перед выключением» для события останова/запуска. Кроме того, программу могут выполнить в то время, когда транспортное средство находится в режиме круиз-контроля или в любом режиме, использующим постоянный диапазон частоты вращения двигателя. Если состояние двигателя или ВСГРП не соответствуют требуемым, то на шаге 608 один или несколько приводов двигателя могут регулировать для активного обеспечения требуемой частоты вращения двигателя и требуемого крутящего момента, необходимых для выполнения диагностической программы и для поддержания ВСГРП в пределах целевого диапазона крутящего момента.
Если условия выполнения для программы соблюдены, то на шаге 610 программа содержит отправку сигнала посредством контроллера для включения электромагнита механизма натяжения, что позволяет перевести механизм натяжения в выдвинутое состояние и увеличить силу натяжения, приложенную к ременной передаче. На шаге 612 могут включить таймер.
На шаге 614 могут наблюдать один или несколько параметров, характеризующих нагрузку двигателя, после включения электромагнита и перевода механизма натяжения в выдвинутое состояние. Например, могут наблюдать один или несколько параметров из следующих: масса 616 впускного воздуха, давление 618 воздуха во впускном коллекторе, темп потребления 617 топлива двигателем и выработка 619 крутящего момента двигателя. Массу 616 впускного воздуха могут измерить посредством датчика МРВ, соединенным с впускным патрубком. Давление во впускном коллекторе могут измерить посредством датчика ДВК, соединенного со впускным коллектором. Потребление топлива двигателем могут определить на основе длительности импульса для топливного инжектора, когда импульс задается командой контроллера двигателя. Значение вырабатываемого крутящего момента двигателя могут определить на основе частоты вращения двигателя, измеренной датчиком частоты вращения коленчатого вала. В качестве альтернативы могут использовать датчик крутящего момента, соединенный с выходным валом двигателя, для измерения крутящего момента двигателя. Перевод механизма натяжения в выдвинутое состояние, как ожидается, должен увеличить силу натяжения, приложенную к приводному ремню, и увеличить нагрузку двигателя. Когда нагрузка двигателя увеличивается, контроллер двигателя может увеличить степень открытия впускного дросселя, что приводит к увеличению массового расхода воздуха и к увеличению давления в коллекторе. В дополнение, для поддержания работы двигателя с заданным воздушно-топливным отношением, например, со стехиометрическим отношением, могут увеличить расход топлива (как функцию увеличения заряда воздуха). В результате увеличения подачи воздуха и топлива в двигатель, может увеличиться выработка крутящего момента двигателем. Таким образом, значение приложенной дополнительной силы натяжения к ремню ПВУПР посредством активации механизма натяжения (перевода в выдвинутое состояние) могут определить на основе увеличения нагрузки двигателя, которое может быть определено посредством измерения величины изменения (увеличения) массы воздуха, давления воздуха, расхода топлива и/или выработки крутящего момента двигателя.
На шаге 620 могут определить, превысило ли значение таймера пороговое время Т. Таким образом, можно определить, истек ли пороговый период времени с того момента, когда механизм натяжения был переведен в выдвинутое состояние. Пороговое время Т может соответствовать продолжительности работы двигателя с предполагаемой более высокой нагрузкой двигателя, необходимой для надежного обнаружения увеличения одного или нескольких параметров, характеризующих нагрузку двигателя (на шаге 614). Если пороговый период времени Т не истек, то на шаге 622 программа может продолжить наблюдение параметров, характеризующих работу двигателя, до тех пор, пока не будет достигнуто пороговое время Т. Если пороговый период времени Т истек, то программа может перейти к шагу 624.
На шаге 624 могут определить, превышает ли нагрузка двигателя, оцененная на основе одного или нескольких параметров, характеризующих нагрузку двигателя, первое пороговое значение. В одном примере первое пороговое значение основано на нагрузке двигателя в условиях холостого хода. Если предполагаемая нагрузка двигателя ниже первого порогового значения, то способ переходит к шагу 626, на котором могут сделать вывод, что механизм натяжения не полностью перешел в выдвинутое состояние. Например, могут сделать вывод, что механизм натяжения застрял во втянутом состоянии, и не перешел в выдвинутое состояние после включения электромагнита. Контроллер может установить код диагностики для информирования о неисправности механизма натяжения, возникшей, например, вследствие износа и/или растяжения ремня. В качестве реакции на индикацию неисправности, могут выполнить один или несколько шагов для компенсации неисправности. Например, в качестве реакции на информирование о застревании механизма натяжения во втянутом состоянии, может быть запрещено выключение двигателя, и может быть ограничена амплитуда усиления крутящего момента. Дополнительно могут ограничить крутящий момент двигателя для заряжания аккумулятора. Например, могут ограничить мощность, создаваемую ВСГРП для помощи двигателю, и могут ограничить операции запуска/остановки. В дополнение, могут отобразить сообщение для владельца транспортного средства, чтобы предупредить его о том, что двигатель не может быть перезапущен после выключения двигателя. Кроме того, если неисправность сохраняется в течение многократных ключевых циклов двигателя, может потребоваться предупреждение водителя о необходимости поиска станции техобслуживания.
Если нагрузка двигателя увеличилась выше первого порогового значения, то на шаге 628 могут определить, меньше ли оценненная нагрузка двигателя, чем второе пороговое значение, которое больше первого порогового значения. В одном примере второе пороговое значение основано на оцененном крутящем моменте двигателя, используемом для обнаружения включения исполнительного механизма в соответствии с командой. Когда исполнительный механизм будет находиться в активном состоянии, он будет выдвигаться, что увеличит силу натяжения ремня ПВУПР, что, в свою очередь, увеличит нагрузку на двигатель. Это увеличение нагрузки на двигатель можно обнаружить посредством сравнения оцененной нагрузки двигателя до и после включения исполнительного механизма. Если значение оцененной нагрузки находится в пределах ожидаемого диапазона (то есть, в диапазоне между первым пороговым значением и вторым пороговым значением), то на шаге 632 могут сделать вывод, что механизм натяжения действительно функционировал надлежащим образом и действительно прикладывал увеличенную силу натяжения к ременной передаче после перевода в выдвинутое состояние. Контроллер может информировать о том, что механизм натяжения не имеет неисправности.
Если оцененная нагрузка двигателя превышает первое пороговое значение и второе пороговое значение, то на шаге 630 могут сделать вывод, что механизм натяжения выдвинут в слишком большой степени (например, механизм натяжения застрял в выдвинутом состоянии), и что может происходить проскальзывание ремня и может увеличиваться внутренний износ двигателя вследствие чрезмерного натяжения ремня. Контроллер может установить код диагностики для информирования о неисправности механизма натяжения. В качестве реакции на информирование о неисправности могут выполнить один или несколько шагов для компенсации неисправности. Например, в качестве реакции на информирование о застревании механизма натяжения в выдвинутом состоянии могут ограничить крутящий момент двигателя, получаемый за счет наддува. Это делают для уменьшения темпа износа ремня ПВУПР и уменьшения износа внутренних подшипников двигателя. Следует учитывать, что, в то время как на фиг. 6 в качестве примера раскрыта диагностика механизма натяжения на основе изменения нагрузки двигателя после перевода механизма натяжения в выдвинутое состояние, в альтернативных примерах механизм натяжения могут диагностировать на основе изменения нагрузки двигателя после перевода механизма натяжения во втянутое состояние. В результате обнаружения уменьшения крутящего момента система подтверждает, что механизм натяжения не создает избыточную силу натяжения.
На фиг. 7 показан предполагаемый пример диагностики механизма натяжения ремня на диаграмме 700. Частота вращения двигателя показана на графике 702, состояние электромагнита активного механизма натяжения (включен или обесточен) показано на графике 704, крутящий момент ВСГРП (положительный или отрицательный) показан на графике 706, крутящий момент двигателя показан на графике 708, давление в коллекторе (ДВК) показано на графике 710 и статус флага (указывающего на неисправность механизма натяжения) показан на графике 712. Все графики соответствуют некоторому промежутку времени, отложенного вдоль оси X.
До момента времени t1 двигатель выключен, и транспортное средство не движется. В момент времени t1, в качестве реакции на событие использования ключа зажигания, получают сигнал на перезапуск двигателя. Для перезапуска двигателя ВСГРП работает в качестве мотора, создавая положительный крутящий момент ВСГРП. Крутящий момент ВСГРП используется для проворачивания двигателя посредством передачи крутящего момента через приводной ремень ПВУПР. Для того чтобы крутящий момент ВСГРП мог быть передан к двигателю без проскальзывания ремня, включают электромагнит механизма натяжения, и механизм натяжения перемещается в выдвинутое состояние.
Между моментами времени t1 и t2 механизм натяжения находится в выдвинутом состоянии, и крутящий момент ВСГРП используется для вращения двигателя. В момент времени t2 частота вращения двигателя больше пороговой частоты вращения, при которой процесс сгорания в двигателе может поддерживать вращение двигателя. Таким образом, в момент времени t2, механизм натяжения ВСГРП обесточен и возвращен во втянутое состояние. В качестве реакции на вращение двигателя, частота вращения двигателя и давление в коллекторе начинают увеличиваться.
Между моментами времени t2 и t3 транспортное средство двигается за счет крутящего момента двигателя, и крутящий момент ВСГРП равен нулю или приблизительно равен нулю, поскольку работа ВСГРП не требуется. В момент времени t3 происходит событие замедления, и крутящий момент двигателя превышает требуемый крутящий момент. Для повышения темпа замедления двигателя используют отрицательный крутящий момент ВСГРП. В частности, обеспечивают работу ВСГРП в качестве генератора, что позволяет поглотить избыточный крутящий момент двигателя. Для того чтобы крутящий момент двигателя мог быть передан к ВСГРП без проскальзывания ремня, включают электромагнит механизма натяжения, и механизм натяжения перемещается в выдвинутое состояние. Как только частота вращения двигателя уменьшается до частоты вращения холостого хода, и крутящий момент двигателя уменьшается до нулевого крутящего момента, отключают электромагнит механизма натяжения и возвращают механизм натяжения во втянутое состояние. После этого выработка крутящего момента двигателя увеличивается для выполнения требования по крутящему моменту.
В момент времени t4 существует увеличение требования по крутящему моменту, например, вследствие нажатия водителем педали акселератора. Выработка крутящего момента двигателя не достаточна для выполнения требования по крутящему моменту. Для помощи в выработке мощности используют положительный крутящий момент ВСГРП для добавления к крутящему моменту двигателя, подаваемого к колесам транспортного средства. Для того чтобы обеспечить передачу крутящего момента ВСГРП без проскальзывания ремня, включают электромагнит механизма натяжения, и механизм натяжения перемещается в выдвинутое состояние. Затем, когда дополнительная мощность не требуется, отключают электромагнит механизма натяжения, и механизм натяжения возвращается во втянутое состояние.
Незадолго до момента времени t5 двигатель находится в состоянии холостого хода с включенной нейтральной передачей, и крутящий момент ВСГРП приблизительно равен нулю. Соответственно, в момент времени t5 подтверждают возможность начала и выполнения диагностики механизма натяжения. Включают электромагнит механизма натяжения, и механизм натяжения перемещается в выдвинутое состояние. Когда механизм натяжения находится в выдвинутом состоянии, увеличивается нагрузка на двигатель от ВСГРП. В результате, частота вращения двигателя и нагрузка двигателя, как ожидается, увеличивается. В это время наблюдают значение ДВК в течение некоторого времени (после момента времени t5 и до момента времени t6) после включения электромагнита, и значение ДВК используют для определения нагрузки двигателя.
В изображенном примере не наблюдается какое-либо значительное увеличение нагрузки или крутящего момента двигателя. Ожидаемый профиль крутящего момента двигателя на период включения механизма натяжения показан штриховой линией 709, и ожидаемый профиль нагрузки двигателя, соответствующий ожидаемому профилю значений ДВК на период включения механизма натяжения, показан штриховой линией 711.
Поскольку нагрузка двигателя увеличивается до значения, меньшего, чем пороговая нагрузка (что оценивают на основе измерения значений ДВК) в то время, когда механизм натяжения переводят в выдвинутое состояние, в момент времени t6 делают вывод, что механизм натяжения застревает во втянутом состоянии и не прикладывает к ремню силу натяжения, соответствующую выданной команде. Поэтому в момент времени t6 обозначают наличие неисправности механизма натяжения посредством установки флага. В дополнение, временно запрещают выключение двигателя.
Таким образом, за счет точной и надежной диагностики активного механизма натяжения ремня, можно более эффективно предсказывать проскальзывание ремня и предпринимать своевременные действия. Технический эффект от диагностики механизма натяжения ремня на основе изменения нагрузки двигателя после перевода механизма натяжения в выдвинутое состояние заключается в том, что присутствие или отсутствие увеличения нагрузки двигателя можно соотнести с состоянием механизма натяжения. При помощи одного или несколько параметров, характеризующих нагрузку двигателя для диагностики механизма натяжения, диагностика может быть выполнена с использованием существующих датчиков двигателя, и с потребностью в дополнительных компонентах. За счет диагностики механизма натяжения на основе заданного командой состояния относительно реального состояния, выведенного на основе нагрузки двигателя, можно более эффективно отличить неисправность механизма натяжения, вызывающую избыточное натяжение ремня, от неисправности механизма натяжения, вызывающей недостаточное натяжение ремня. В результате, может быть уменьшено количество случаев проскальзывания ремня, что позволяет увеличить срок службы и улучшить рабочее состояние механизма натяжения ремня. Своевременная диагностика механизма натяжения позволяет улучшить эффективность функционирования двигателя.
Один пример способа для двигателя содержит шаги, на которых: регулируют рабочее состояние механизма натяжения ремня, соединенного с приводным ремнем; и указывают на неисправность механизма натяжения, если нагрузка двигателя меньше пороговой нагрузки после регулирования. В предыдущих примерах, способ дополнительно или опционально содержит шаги, на которых запрещают автоматическое выключение двигателя в случае указания на неисправность. В любых или всех предыдущих примерах, способ дополнительно или опционально содержит шаги, на которых выключают двигатель в качестве реакции на требование водителя выключить двигатель или в качестве реакции на выход водителя из транспортного средства. В любых или всех предыдущих примерах, способ дополнительно или опционально содержит шаги, на которых регулируют рабочее состояние механизма натяжения посредством перевода механизма натяжения из втянутого состояния в выдвинутое состояние. В любых или всех предыдущих примерах, дополнительно или опционально, определяют нагрузку двигателя на основе одного или более из следующего: измеренный поток воздуха в коллекторе, измеренное давление в коллекторе и крутящий момент двигателя. В любых или всех предыдущих примерах, дополнительно или опционально, регулирование включает в себя регулирование рабочего состояния механизма натяжения ремня в то время, когда абсолютное значение положительного или отрицательного крутящего момента, приложенного к приводному ремню встроенным стартер-генератором с ременным приводом, меньше порогового крутящего момента. В любых или всех предыдущих примерах, дополнительно или опционально, регулирование включает в себя регулирование в то время, когда двигатель работает на холостом ходу, а трансмиссия переключена на нейтральную передачу. В любых или всех предыдущих примерах, дополнительно или опционально, механизм натяжения соединяют с первым участком приводного ремня, расположенным между коленчатым валом двигателя и стартером-мотором. В любых или всех предыдущих примерах, способ дополнительно или опционально содержит шаги, на которых указывают на неисправность посредством указания на то, что механизм натяжения застрял во втянутом состоянии. В любых или всех предыдущих примерах, способ дополнительно или опционально отличается тем, что в выдвинутом состоянии механизма натяжения увеличивается сила натяжения, приложенная механизмом натяжения к приводному ремню. В любых или всех предыдущих примерах, способ дополнительно или опционально содержит шаги, на которых прикладывают силу натяжения ко второму участку приводного ремня между стартер-мотором и дополнительной нагрузкой, причем дополнительная нагрузка содержит воздушный кондиционер, причем дополнительная нагрузка соединена с приводным ремнем через шкив муфты воздушного кондиционера.
Другой пример способа для двигателя содержит шаги, на которых: в то время, когда крутящий момент, приложенный встроенным стартер-генератором с ременной передачей к приводному ремню, меньше порогового крутящего момента, подают питание на электромагнит для перевода механизма натяжения, соединенного с приводным ремнем, в выдвинутое состояние; и указывают на неисправность механизма натяжения на основе изменения нагрузки двигателя, происходящего в результате подачи питания и одновременно с ней. В любых или всех предыдущих примерах, дополнительно или опционально, крутящий момент представляет собой положительный крутящий момент, прикладываемый встроенным стартер-генератором с ременной передачей к приводному ремню для проворачивания двигателя или для создания дополнительной мощности, в помощь двигателю. В любых или всех предыдущих примерах, дополнительно или опционально, крутящий момент представляет собой отрицательный крутящий момент, прикладываемый встроенным стартер-генератором с ременной передачей к приводному ремню для заряжения аккумулятора, присоединенного к встроенному стартер-генератору с ременной передачей. В любых или всех предыдущих примерах, способ дополнительно или опционально содержит, в случае информирования, запрет на автоматическое выключение двигателя при отсутствии команды водителя; и выключение двигателя в качестве реакции на явную команду водителя. В любых или всех предыдущих примерах, дополнительно или опционально, указание включает в себя указание на неисправность на основе изменения нагрузки двигателя, включающего в себя увеличение нагрузки двигателя на значение, меньшее порогового изменения нагрузки двигателя.
Другой пример системы транспортного средства содержит следующее: вспомогательное устройство переднего расположения, содержащее ремень; двигатель, соединенный с ремнем через шкив коленчатого вала; встроенный стартер-генератор с ременной передачей, соединенный с ремнем через шкив встроенного стартер-генератора с ременной передачей, причем встроенный стартер-генератор с ременной передачей соединен с аккумулятором; дополнительная нагрузка, соединенная с ремнем через шкив муфты; механизм натяжения с электрическим приводом, соединенный с ремнем между шкивом коленчатого вала и шкивом встроенного стартер-генератора с ременной передачей, причем механизм натяжения содержит электромагнит, соединенный с пружинным механизмом; и контроллер с машиночитаемыми инструкциями, хранимыми в долговременной памяти для следующего: когда крутящий момент встроенного стартер-генератора с ременной передачей по существу равен нулю, и двигатель работает на холостом ходу; выдача команды на механизм натяжения для перевода механизма натяжения в выдвинутое состояние посредством подачи питания на электромагнит; определение фактического состояния механизма натяжения на основе изменения нагрузки двигателя после подачи питания; и информирование о неисправности механизма натяжения на основе заданного командой состояния относительно фактического состояния механизма натяжения. В предыдущем примере, дополнительно или опционально, определение включает в себя определение фактического состояния механизма натяжения, представляющего собой втянутое состояние, если изменение нагрузки двигателя меньше порогового изменения нагрузки двигателя, а указание включает в себя указание на неисправность механизма натяжения, если заданное командой состояние механизма натяжения не соответствует фактическому состоянию механизма натяжения. В любых или всех предыдущих примерах, дополнительно или опционально, контроллер содержит дополнительные команды для следующего: запрет на выключение двигателя, если уровень заряда аккумулятора превышает пороговый уровень заряда или если уменьшается требование водителя крутящему моменту; и выключение двигателя, если существует требование выключения двигателя от водителя или если водитель вышел из транспортного средства.
Следует отметить, что включенные в настоящую заявку примеры управляющих программ и программ оценки могут быть использованы с разнообразными конфигурациями систем двигателя и/или транспортного средства. Способы управления и управляющие программы, раскрытые в настоящей заявке, могут быть сохранены как исполняемые инструкции в долговременной памяти и выполнены управляющей системой, состоящей из контроллера в сочетании с различными датчиками, приводами и другими средствами двигателя. Конкретные программы, раскрытые в настоящей заявке, могут представлять собой одну или более стратегий обработки, таких как управляемые по событиям, управляемые по прерываниям, многозадачные, многопоточные и т.п. Кроме того, проиллюстрированные разнообразные действия, операции и/или функции могут быть выполнены в указанной последовательности, параллельно или в некоторых случаях могут быть пропущены. Аналогичным образом, указанный порядок обработки не обязателен для достижения отличительных признаков и преимуществ раскрываемых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут быть выполнены повторно в зависимости от конкретной применяемой стратегии. Более того, раскрытые действия, операции и/или функции могут представлять в графическом виде код, который должен быть запрограммирован в долговременную память машиночитаемой среды хранения данных в управляющей системе двигателя, при этом раскрытые действия могут быть выполнены посредством исполнения инструкций в системе, содержащей различные компоненты обеспечения двигателя совместно с электронным контроллером.
Следует понимать, что конфигурации и алгоритмы, раскрытые в настоящей заявке, носят иллюстративный характер, и что эти конкретные варианты осуществления изобретения не следует рассматривать в качестве ограничения, так как возможны многочисленные модификации. Например, вышеизложенная технология может быть применена в двигателях с конфигурацией цилиндров V-6, 1-4, 1-6, V-12, с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, а также другие отличительные признаки, функции и/или свойства, раскрытые в настоящей заявке.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая наличие двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.



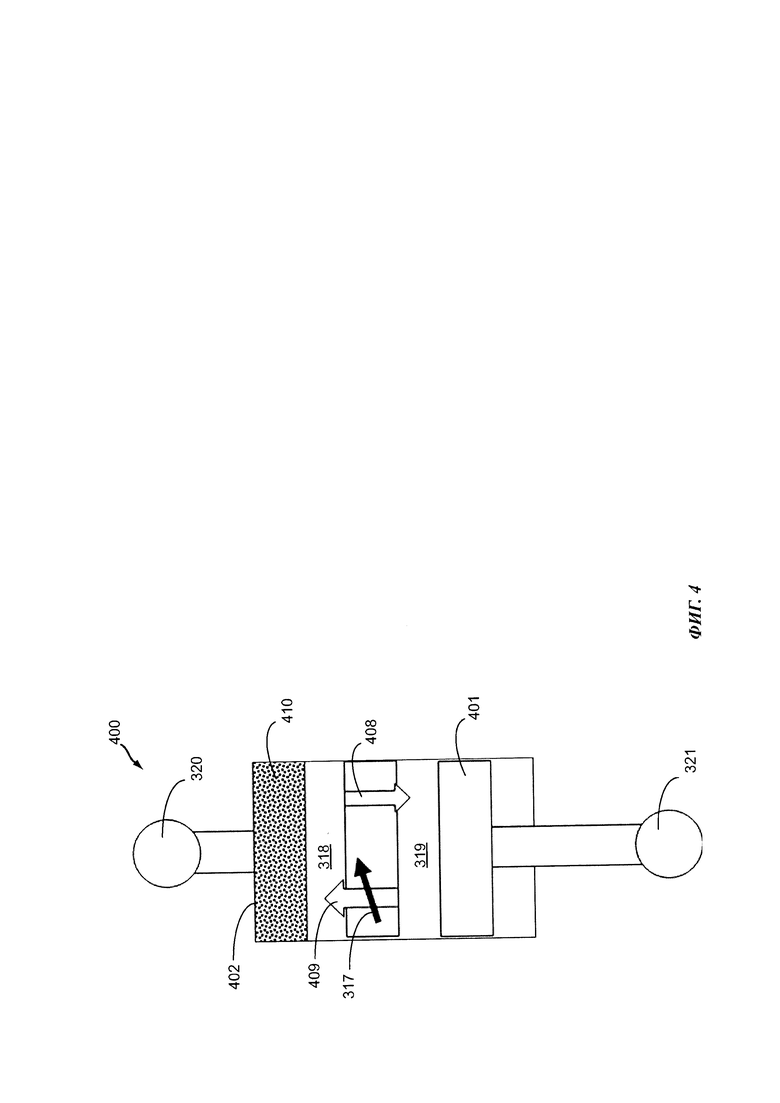

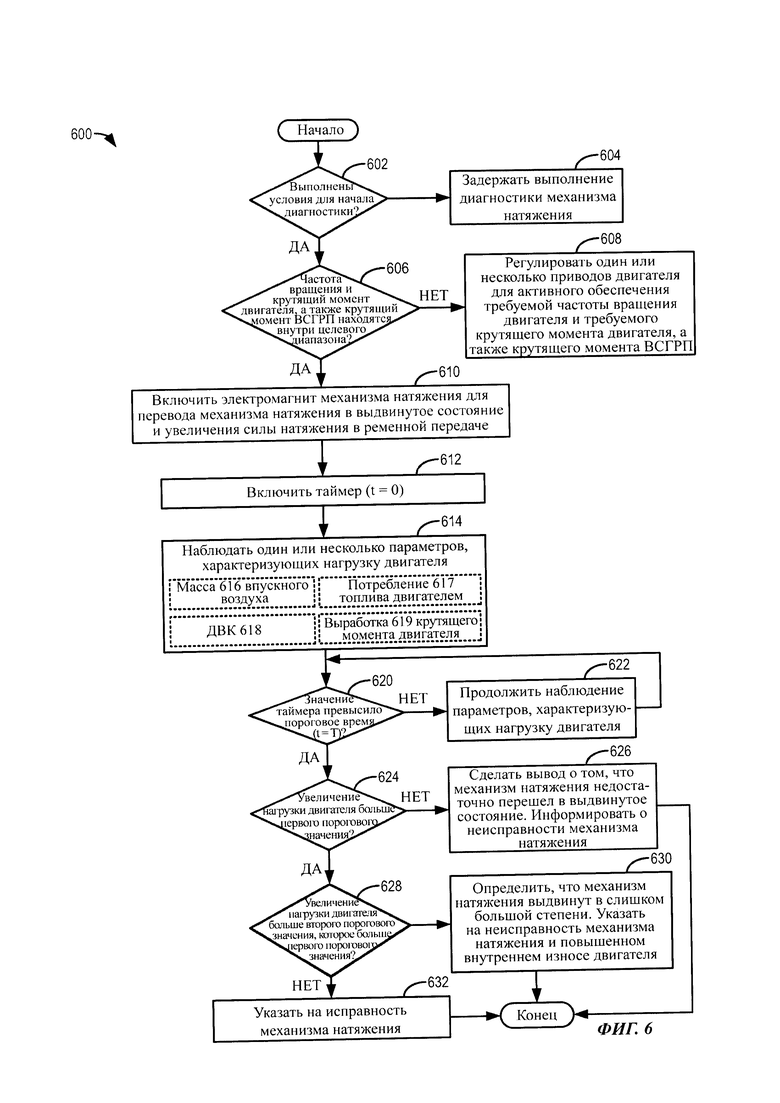
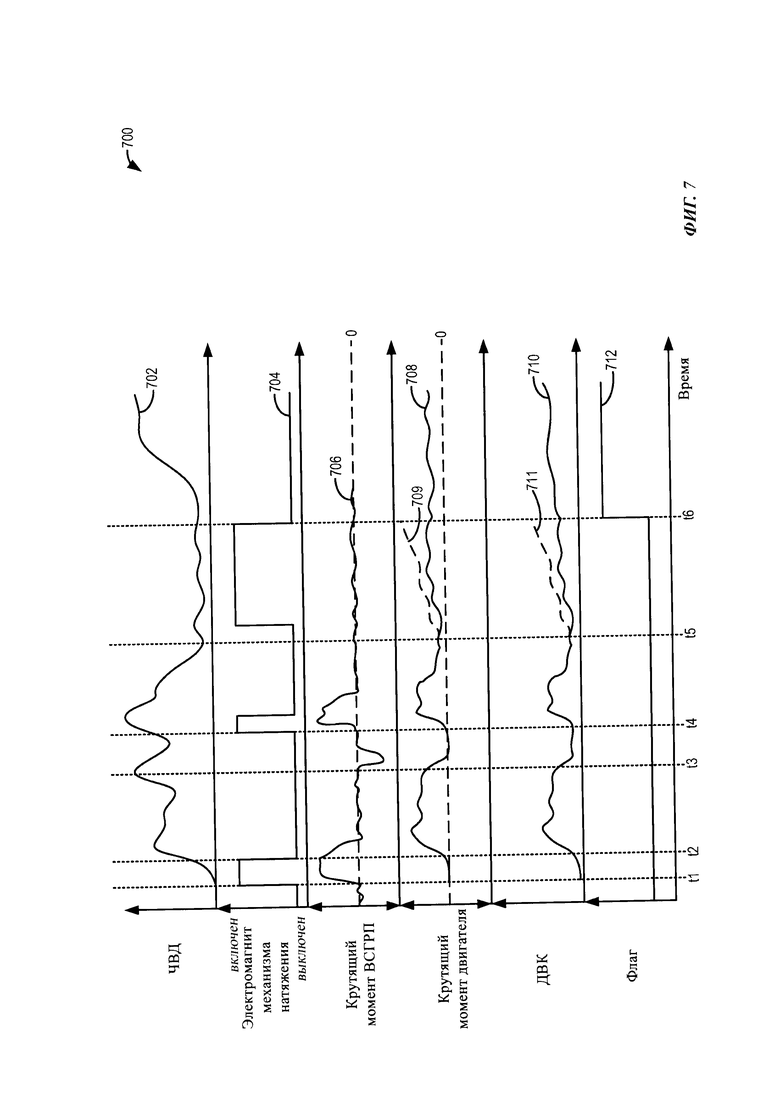
Представлены способы и системы для обнаружения неисправности активного механизма натяжения ремня встроенного стартера-генератора с ременной передачей (ВСГРП), соединенного с двигателем транспортного средства. За счет использования полученного в результате наблюдений изменения нагрузки привода вспомогательного устройства переднего расположения (ПВУПР) для сравнения фактического состояния механизма натяжения (который может находиться во втянутом или в выдвинутом состоянии) с заданным командой состоянием можно отличить наличие избыточного натяжения ремня от наличия недостаточного натяжения ремня. Своевременная диагностика механизма натяжения ремня позволяет улучшить состояние ремня и обеспечить на более длительный срок преимущества экономии топлива за счет системы ВСГРП. 2 н. и 12 з.п. ф-лы, 7 ил.
1. Способ применения активного механизма натяжения ремня встроенного стартера-генератора с ременной передачей (ВСГРП), соединенного с двигателем транспортного средства, содержащий шаги, на которых:
регулируют рабочее состояние механизма 5 натяжения ремня, соединенного с приводным ремнем;
указывают на неисправность механизма натяжения, если нагрузка двигателя меньше пороговой нагрузки после регулирования; и
запрещают автоматическое выключение двигателя в случае указания на неисправность.
2. Способ по п. 1, дополнительно содержащий шаги, на которых выключают двигатель в качестве реакции на требование водителя выключить двигатель или в качестве реакции на выход водителя из транспортного средства.
3. Способ по п. 1, отличающийся тем, что регулирование рабочего состояния механизма натяжения предусматривает, что механизм натяжения переводят из втянутого состояния в выдвинутое состояние.
4. Способ по п. 3, отличающийся тем, что механизм натяжения ремня представляет собой электрогидравлический механизм натяжения ремня, причем регулирование рабочего состояния предусматривает, что на электромагнит механизма натяжения подают питание для перевода механизма натяжения в выдвинутое состояние.
5. Способ по п. 1, отличающийся тем, что нагрузку двигателя определяют на основе одного или более из следующего:
измеренный поток воздуха в коллекторе,
измеренное давление в коллекторе и
крутящий момент двигателя.
6. Способ по п. 1, отличающийся тем, что регулирование предусматривает, что рабочее состояние механизма натяжения ремня регулируют в то время, когда абсолютное значение положительного или отрицательного крутящего момента, приложенного к приводному ремню встроенным стартером-генератором с ременным приводом, меньше порогового крутящего момента.
7. Способ по п. 1, отличающийся тем, что регулирование предусматривает, что регулируют в то время, когда двигатель работает на холостом ходу, а трансмиссия переключена на нейтральную передачу.
8. Способ по п. 1, отличающийся тем, что механизм натяжения соединяют с первым участком приводного ремня, расположенным между коленчатым валом двигателя и стартером-мотором.
9. Способ по п. 1, отличающийся тем, что указание на неисправность предусматривает, что указывают на то, что механизм натяжения застрял во втянутом состоянии.
10. Способ по п. 1, отличающийся тем, что в выдвинутом состоянии механизма натяжения увеличивается сила натяжения, приложенная механизмом натяжения к приводному ремню.
11. Способ по п. 8, дополнительно содержащий шаги, на которых прикладывают силу натяжения ко второму участку приводного ремня между стартером-мотором и дополнительной нагрузкой, причем дополнительная нагрузка содержит воздушный кондиционер, причем дополнительная нагрузка соединена с приводным ремнем через шкив муфты воздушного кондиционера.
12. Система активного механизма натяжения ремня встроенного стартера-генератора с ременной передачей (ВСГРП), соединенного с двигателем транспортного средства, содержащая:
привод вспомогательного устройства переднего расположения, содержащий ремень;
двигатель, соединенный с ремнем через шкив коленчатого вала;
встроенный стартер-генератор с ременной передачей, соединенный с ремнем через шкив встроенного стартера-генератора с ременной передачей, причем встроенный стартер-генератор с ременной передачей соединен с аккумулятором;
дополнительную нагрузку, соединенную с ремнем через шкив муфты;
механизм натяжения с электрическим приводом, соединенный с ремнем между шкивом коленчатого вала и шкивом встроенного стартера-генератора с ременной передачей, причем механизм натяжения содержит электромагнит, соединенный с пружинным механизмом; и
контроллер с машиночитаемыми инструкциями, хранимыми в долговременной памяти для следующего:
когда крутящий момент встроенного стартера-генератора с ременной передачей, по существу, равен нулю и двигатель работает на холостом ходу;
выдача команды механизму натяжения на перевод механизма натяжения в выдвинутое состояние посредством подачи питания на электромагнит;
определение фактического состояния механизма натяжения на основе изменения нагрузки двигателя после подачи питания и
указание на неисправность механизма натяжения на основе заданного командой состояния относительно фактического состояния механизма натяжения.
13. Система по п. 12, отличающаяся тем, что определение включает в себя определение фактического состояния механизма натяжения, представляющего собой втянутое состояние, если изменение нагрузки двигателя меньше порогового изменения нагрузки двигателя, а указание включает в себя указание на неисправность механизма натяжения, если заданное командой состояние механизма натяжения не соответствует фактическому состоянию механизма натяжения.
14. Система по п. 12, отличающаяся тем, что контроллер содержит дополнительные команды для следующего:
запрет на выключение двигателя, если уровень заряда аккумулятора превышает пороговый уровень заряда или если уменьшается требование водителя крутящего момента; и
выключение двигателя, если существует требование выключения двигателя от водителя или если водитель вышел из транспортного средства.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| CN 201605000 U, 13.10.2010 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

