ОБЛАСТЬ ТЕХНИКИ
Техническое решение относится к авиационной технике, в частности к области самолетостроения.
УРОВЕНЬ ТЕХНИКИ
Заявляемое техническое решение относится к конструкции беспилотного самолета, не имеющего грузовой и пассажирской кабины в виде части фюзеляжа, при этом имеющего в своем составе систему аварийного спасения полезной нагрузки (пассажирского или грузового универсального модуль-контейнера) и предназначенного для транспортировки крупногабаритных грузов в виде универсальных модуль-контейнеров при жестком креплении их к носовой и хвостовой части фюзеляжа, а также в подфюзеляжном пространстве между стойками шасси к силовому каркасу летательного аппарата и между собой, что позволяет формировать из них часть летательного аппарата, за счет чего достигается укомплектование их в единый с летательным аппаратом фюзеляж, выполняющий все его функции.
Наиболее близкими по конструкции к заявляемому техническому решению являются: самолет проекта М-52 в военно-транспортном варианте, оснащенный самостоятельным подвесным контейнером с 28-колесным шасси, стойки которого для обеспечения процесса погрузки-разгрузки конструктивно выполнены «приседающими». К тому же контейнер должен был быть самоходным с высокой маневренностью. По замыслу конструкторов, самолет М-52А-1, выполненный в варианте «Воздушный старт», мог совершать полеты на высоте 8-10 км с подвесным топливным баком массой 400 тонн.
В Бюро по патентам и товарным знакам США (USPTO) зарегистрирован патент концерна Airbus на создание разделяемого самолета (US 9193460 B2), в котором салон и багажный отсек лайнера разделены универсальной съемной капсулой, которая позволяет значительно сократить время простоя самолетов в аэропортах. В таких капсулах размещается багаж и пассажиры, а после приземления самолета кран удаляет капсулу с пассажирами, заменяя ее на новую.
Для фиксации подвижной капсулы к самолету создана специальная система со сменными штифтами. Капсула герметична, на ее крыше установлены специальные приспособления для погрузки краном. В настоящее время проект не реализован и еще неизвестно: получит ли необычная технология Airbus сертификат на серийное производство.
В Швейцарии инженеры Федерального политехнического института Лозанны работают над проектом, который пока существует только в 3D-модели. Разрабатываемый модульный летательный аппарат получил рабочее название «гондолоплан», поскольку состоит из двух основных частей: летательного модуля (планер, кабина пилотов и двигатель) и съемных гондол, оборудованных внутри под пассажирский салон или под грузовой отсек. Дизайн швейцарского концепта выполнен на основе летающего крыла, располагающегося довольно высоко над землей, что оставляет достаточно пространства для крепления к нему вплоть до трех гондол. С увеличением катастроф пассажирских самолетов активно обсуждаются идеи спасения пассажиров с помощью специального отбрасываемого модуля. В настоящее время идея модульного исполнения воздушного лайнера находится в состоянии концептуальной разработки.
Однако, очевидно, что модель самолета с отделяющимся корпусом (самолета модульного типа) позволяет не только изменить авиацию по направлению грузоперевозок и пассажирского транспорта, но и максимально повысить уровень безопасности полетов. Съемная капсула, которая может играть роль как грузового отсека, так и пассажирского салона, может фиксироваться (присоединяться и отсоединяться) к несущей конструкции самолета, сохраняя прочностные параметры во время взлета, полета или посадки.
Отделившаяся от самолета в случае аварии капсула может приземляться как на твердую поверхность, так и на воду. Капсула оснащается мощными парашютами и надувными баллонами, которые удерживают ее на плаву или смягчают посадку на землю.
Очевидно, что направление полимодульности в рамках одного летательного аппарата со специализацией модулей и возможностью спасения людей и грузов при аварии актуально. Но следует отметить, что проектируемые летательные аппараты остаются либо многоконтейнерными, пилотируемыми без системы аварийного спасения и без возможности использования с другими видами транспорта, либо пилотируемыми и имеющими систему аварийного спасения только в виде пассажирской монокапсулы или подвесной узкоспециализированный моноконтейнер без возможности использования с другими видами транспорта и без системы аварийного спасения.
Задачей, решаемой заявляемым техническим решением, является создание конструкции беспилотного самолета, не имеющего грузовой и пассажирской кабины в виде части фюзеляжа, при этом имеющего в своем составе систему аварийного спасения полезной нагрузки (пассажирских или грузовых универсальных модуль-контейнеров) и предназначенного для транспортировки крупногабаритных грузов в виде универсальных модуль-контейнеров, позволяющих при жестком креплении их к носовой и хвостовой части фюзеляжа и в подфюзеляжном пространстве между стойками шасси к силовому каркасу летательного аппарата формировать из них часть летательного аппарата, за счет чего достигается укомплектование универсальных модуль-контейнеров с летательным аппаратом в единый фюзеляж, выполняющий все его функции, с целью повышения эффективности и безопасности перемещения людей и грузов, возможности диверсификации транспортировки крупногабаритных грузов в виде универсальных модуль-контейнеров по линии самолет-вертолет и другими видами транспорта.
РАСКРЫТИЕ СУЩНОСТИ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Техническим результатом является создание роботизированной авиационной универсальной системы, содержащей несущую систему, включающую фюзеляж, крыло, хвостовое оперение, гондолы с размещенными двигательными установками, убираемое шасси, и отличающейся тем, что размещение системы беспилотного автоматизированного управления в носовой части фюзеляжа обусловило отсутствие необходимости в экипаже и, соответственно, в кабине пилотов, а также тем, что выполнение сзади носовой и на переднем срезе хвостовой части фюзеляжа замков крепления полезной нагрузки, унифицированных с системами крепления универсального модуль-контейнера в горизонтальной плоскости, и размещение в подфюзеляжном пространстве замков крепления в вертикальной плоскости дает возможность использовать универсальный модуль-контейнер в качестве полезной нагрузки как подвесной контейнер.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что в подфюзеляжном пространстве путем крепления к силовому каркасу размещена система аварийного спасения полезной нагрузки. Крепление производится через замки, автоматически срабатывающие при аварийной ситуации в воздухе и приводящие к штатному срабатыванию систем мягкой посадки.
Возможен вариант технического решения, где в составе системы аварийного спасения полезной нагрузки имеются замки, унифицированные с узлами крепления универсального модуль-контейнера для его вертикального крепления. Это позволило отказаться от грузовой кабины, благодаря чему полезная нагрузка в виде универсальных модуль-контейнеров в подфюзеляжном пространстве за счет жесткого крепления между собой, с системой аварийного спасения и с силовым каркасом носовой и хвостовой части фюзеляжа, на которых находятся замки крепления полезной нагрузки, унифицированные с системами крепления универсального модуль-контейнера, в горизонтальной плоскости образуют единую с роботизированной авиационной универсальной системой пассажирскую, грузовую или комбинированную часть фюзеляжа, выполняющую все его функции. Благодаря этому полезная нагрузка в виде универсальных модуль-контейнеров расположена ближе к центру тяжести, что улучшает устойчивость и управляемость летательного аппарата.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что плоская поверхность донной части универсальных модуль-контейнеров за счет жесткого крепления между собой, с системой аварийного спасения и с силовым каркасом хвостовой и носовой части фюзеляжа, также имеющей плоскую донную часть, образует единый несущий фюзеляж - аэродинамическое решение, при котором подъемная сила формируется на корпусе летательного аппарата, что может вносить весьма значительный вклад в подъемную силу самолета, повышая его экономичность, эффективность и функциональность.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что наличие в ее составе узлов крепления полезной нагрузки, унифицированных с узлами крепления универсальных модуль-контейнеров грузового и пассажирского типа, обеспечивает возможность диверсификации транспортировки крупногабаритных грузов в виде универсальных модуль-контейнеров как по линии самолет-вертолет, так и другими видами транспорта.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что система автоматизированного управления, расположенная в носовой части фюзеляжа, делает ненужным наличие экипажа и, соответственно, его кабины со сложной системой герметизации и жизнеобеспечения, что приведет к упрощению производства, снижению себестоимости производства, повышению интенсивности эксплуатации и обслуживания авиационной техники, снижению себестоимости воздушных перевозок, повышению эффективности и безопасности перемещения людей и грузов.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что в составе системы аварийного спасения полезной нагрузки имеются замки, унифицированные с узлами крепления универсального модуль-контейнера для его вертикального крепления. Это позволило отказаться от грузовой (пассажирской) кабины фюзеляжа со сложной системой герметизации и жизнеобеспечения, что приведет к упрощению производства, снижению себестоимости производства, повышению интенсивности эксплуатации и обслуживания авиационной техники, снижению себестоимости воздушных перевозок, повышению эффективности и безопасности перемещения людей и грузов.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что в ней отсутствует разделение на грузовую и пассажирскую модель, т.е. она универсальна. Универсальность приводит к большей простоте в проектировании, что снижает стоимость проектирования и производства. Нет разделения на грузовой и пассажирский типы, следовательно, нет необходимости в проектировании и изготовлении соответствующих систем обеспечения.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что она не перевозит часть самой себя, а именно фюзеляж либо большую его часть. Часть фюзеляжа является универсальным модуль-контейнером, то есть полезной нагрузкой, оплачиваемой потребителем, вследствие чего повышается функциональность.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что она способна перевозить одновременно пассажирские и грузовые модули и в случае изменения соотношения потребности в грузо- и пассажиропотоке в очередном аэропорту менять их соотношение. Таким образом, возможно вместо пассажирских модулей присоединить грузовые модули или наоборот, что значительно повышает функциональную мобильность и расширяет возможность логистического маневра грузоперевозок, что приближает транспортную авиацию к железнодорожным перевозкам.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что отсутствие «человеческого фактора» более чем на 2/3 снизит аварийность.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что модульно-контейнерная конструкция самолетов обеспечивает повышение безопасности для каждой группы пассажиров и груза, располагающихся в отдельных модуль-контейнерах. В случае потери контроля над управлением авиалайнером, возникновения ЧС с отказом двигателей, попыткой уничтожения самолета как с воздуха, так и с земли, модульные отсеки могут отделиться от летательного аппарата, а с учетом обеспечения автономности каждого модуля системой плавного снижения (парашютная система, аналогичная имеющейся на спускаемом космическом аппарате или системе десантирования для техники), жизнеобеспечения, положительного плавательного эффекта обеспечивается выживание пассажиров и сохранность груза.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что отсутствие экипажа, автоматизированная система управления и модульно-контейнерная конструкция самолетов обеспечивают повышение безопасности для каждой группы пассажиров и груза, располагающихся в отдельных модуль-контейнерах, что значительно снижает террористическую опасность и даже делает бессмысленным террористический захват летательного аппарата.
Возможен вариант технического решения, где роботизированная авиационная универсальная система характеризуется тем, что она не может функционировать (летать) без полезной нагрузки, чем усложняет и даже делает невозможным ее несанкционированное использование (угоны из аэропорта), тем самым значительно снижая террористическую опасность.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
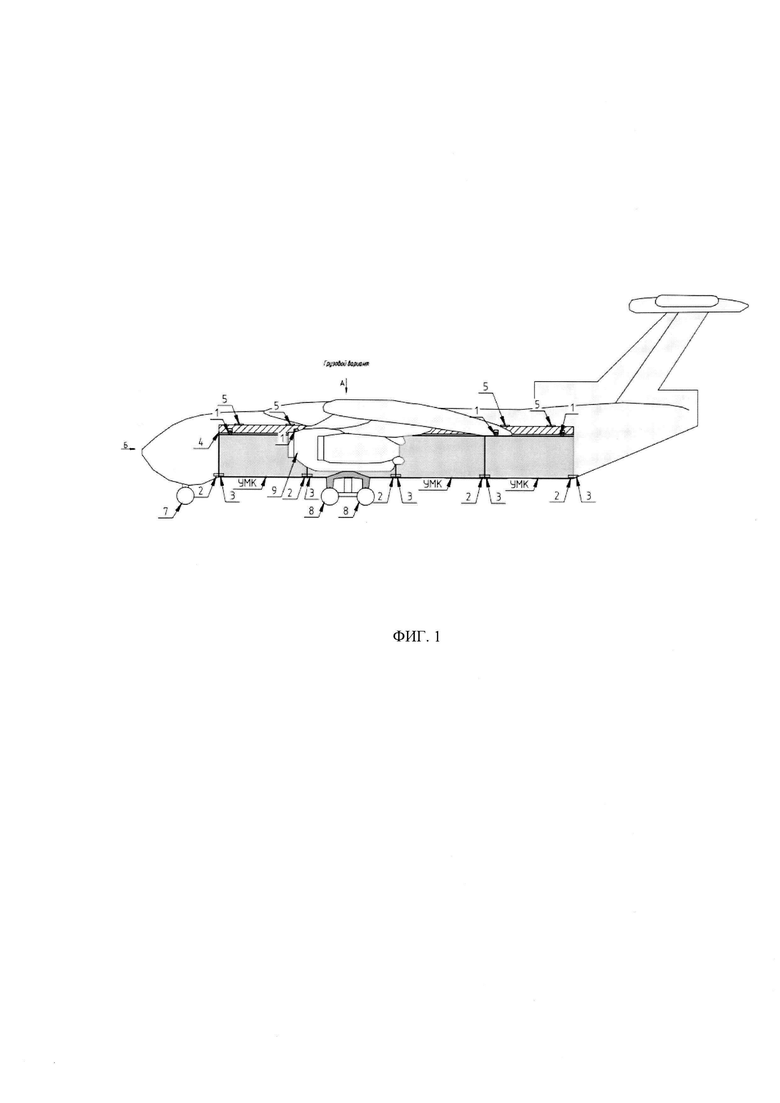
На фиг. 1 показана роботизированная авиационная универсальная система, вид сбоку;
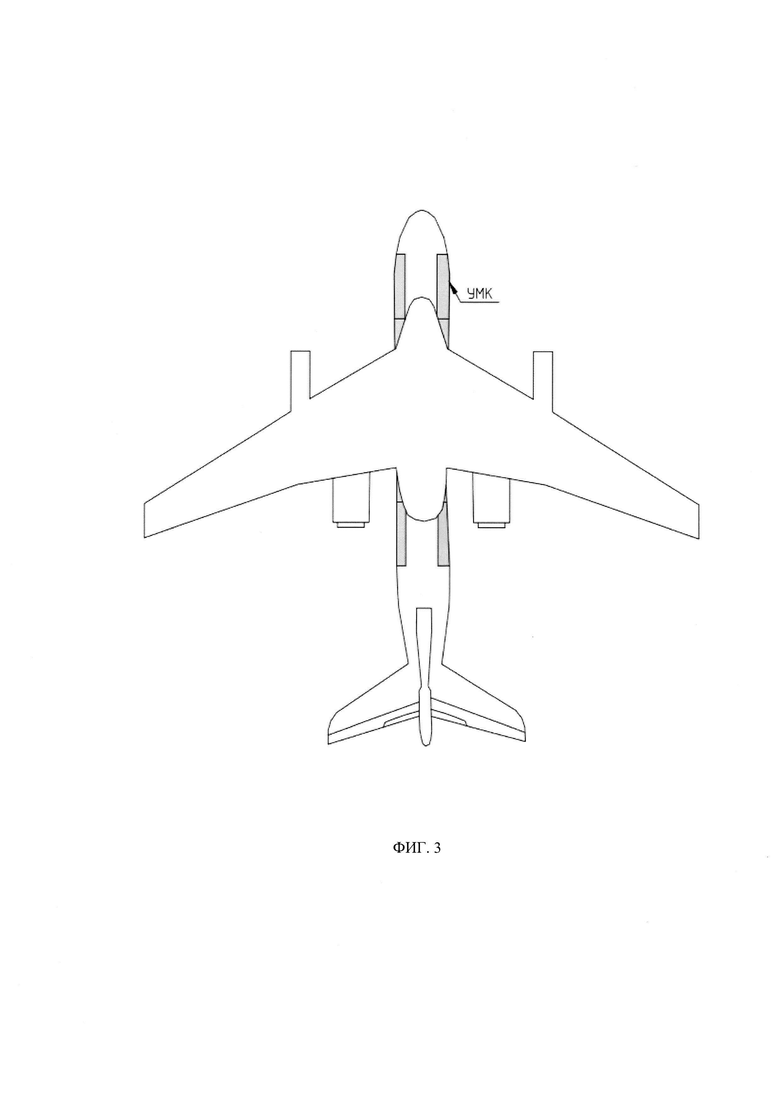
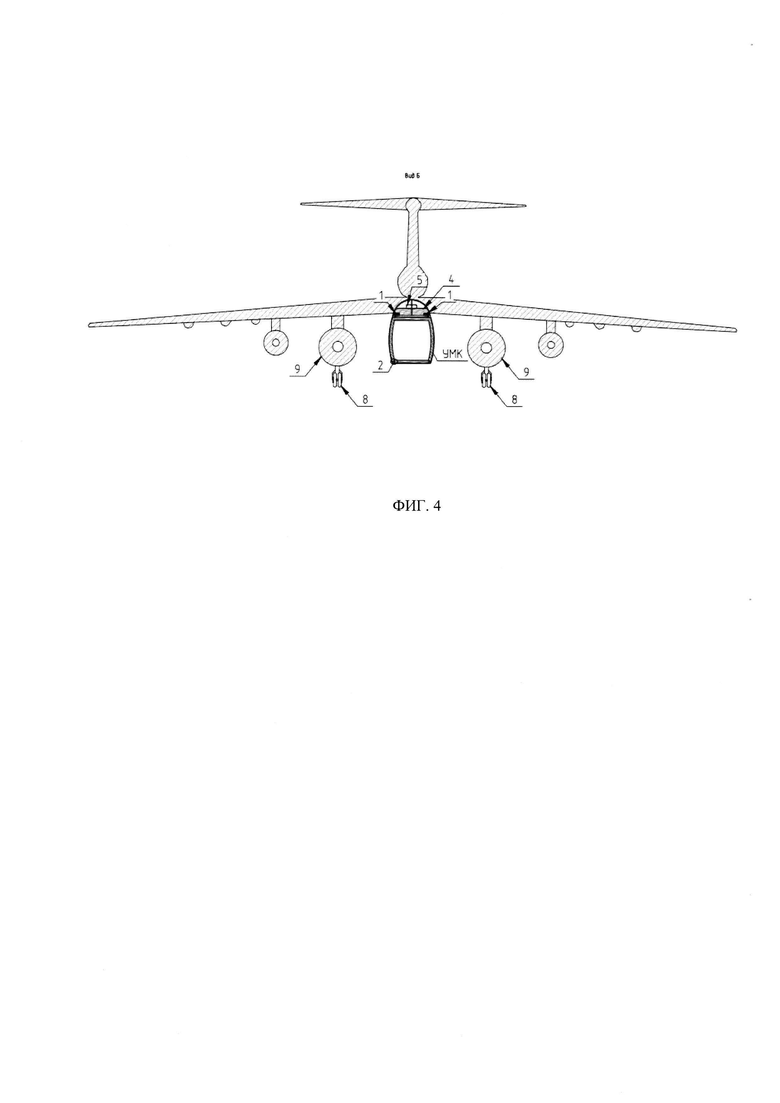
Фиг. 2 - роботизированная авиационная универсальная система, вид спереди;
Фиг. 3 - роботизированная авиационная универсальная система с грузовыми
универсальными модуль-контейнерами в подфюзеляжном пространстве, вид сбоку;
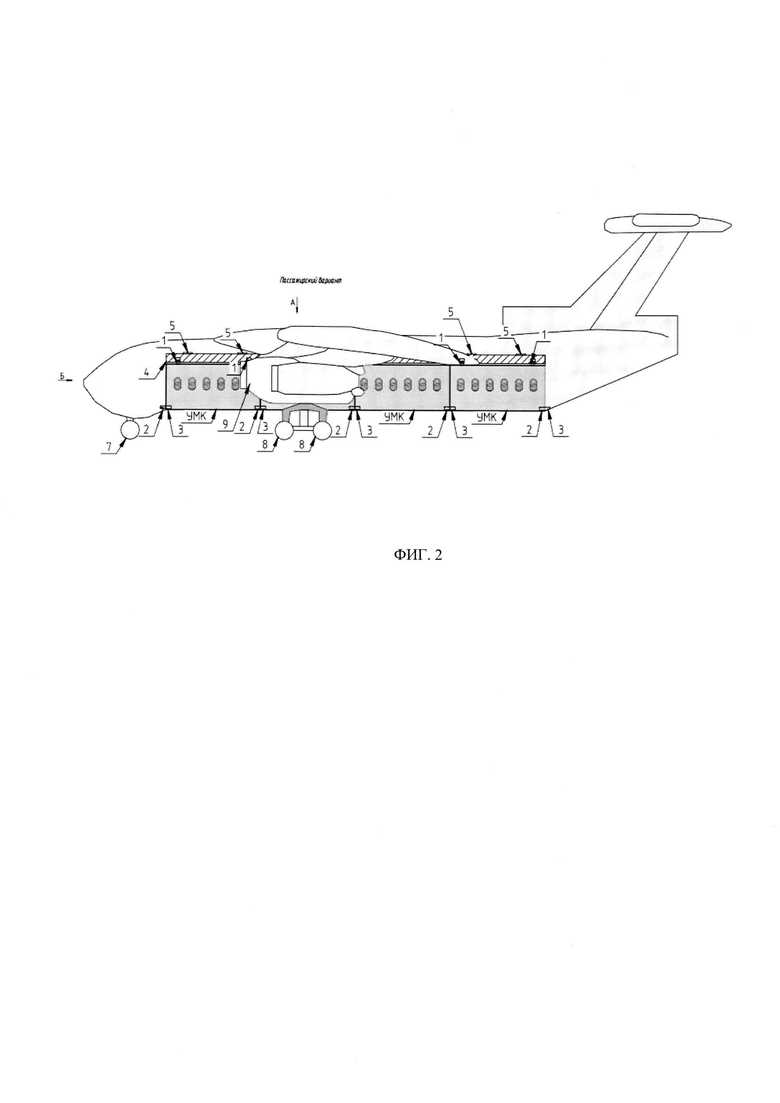
Фиг. 4 - роботизированная авиационная универсальная система с пассажирскими универсальными модуль-контейнерами, вид сбоку.
Поз. 1 - узел крепления УМК к системе аварийного спасения
Поз. 2 - узел крепления УМК пассивный
Поз. 3 - узел крепления УМК активный
Поз. 4 - система аварийного спасения (САС)
Поз. 5 - узел крепления САС к РАУС
Поз. 6 - двигатель
Поз. 7 - переднее шасси
Поз. 8 - основное шасси
Поз. 9 - гондола шасси
ОСУЩЕСТВЛЕНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Роботизированная авиационная универсальная система содержит несущую систему, включающую фюзеляж, крыло, хвостовое оперение, гондолы, куда помещают двигательные установки и убираемое шасси. Шасси включает переднюю стойку и две основные опоры трехточечного шасси, при этом носовая часть фюзеляжа имеет вертикальную опору, на которой закреплена передняя стойка шасси, а основные опоры шасси закреплены под левой и правой подкрыльевыми гондолами, в которые они убираются после взлета. Узлы крепления груза в горизонтальной плоскости к носовой и хвостовой части фюзеляжа и к подфюзеляжному пространству через систему аварийного спасения людей и грузов, находящуюся в подфюзеляжном пространстве, системы автоматизированного управления расположенной в носовой части.
Размещение системы беспилотного автоматизированного управления в носовой части фюзеляжа обусловило отсутствие необходимости в экипаже и, соответственно, в кабине пилотов. Выполнение сзади носовой части фюзеляжа замков для крепления универсального модуль-контейнера в горизонтальной плоскости, выполнение на переднем срезе задней части фюзеляжа замков для крепления универсального модуль-контейнера в горизонтальной плоскости и размещение в подфюзеляжном пространстве путем крепления к силовому каркасу системы аварийного спасения полезной нагрузки, в составе которой имеются замки для вертикального крепления универсального модуль-контейнера, позволило отказаться от грузовой и пассажирской кабины, благодаря чему полезная нагрузка в подфюзеляжном пространстве расположена ближе к центру тяжести. Такое конструктивное решение позволяет сформировать достаточное пространство для транспортировки крупногабаритных грузов в виде универсальных модуль-контейнеров при жестком креплении их к силовому каркасу летательного аппарата через систему аварийного спасения в подфюзеляжном пространстве между стойками шасси и путем соединения их между собой в горизонтальной плоскости унифицированными замками, входящими в конструкцию универсальных модуль-контейнеров, и таким образом формировать из них часть летательного аппарата, за счет чего достигается укомплектование универсальных модуль-контейнеров в единый с летательным аппаратом фюзеляж, выполняющий все его функции. Это улучшает устойчивость и управляемость. Кроме того, плоская поверхность донной части универсальных модуль-контейнеров за счет жесткого крепления между собой, с системой аварийного спасения и с силовым каркасом хвостовой и носовой части фюзеляжа, также имеющей плоскую донную часть, образует единый несущий фюзеляж - аэродинамическое решение, при котором подъемная сила формируется на корпусе летательного аппарата, что может вносить весьма значительный вклад в подъемную силу самолета, повышая его экономичность, эффективность и функциональность.
Выполнение носовой части фюзеляжа с вертикальной опорой, на которой закреплена передняя нога шасси, и крепление основных ног шасси с двумя высокими задними опорами, закрепленными в крыльевых гондолах, а также жесткое соединение универсальных модуль-контейнеров между собой и к силовому каркасу летательного аппарата образует единую силовую схему: фюзеляж - универсальный модуль-контейнер - шасси. Предложенная схема расположения может применяться как для самолетов с реактивными двигателями, так и самолетов с турбовинтовыми двигателями и поршневыми двигателями с винтовым движителем. Кроме того, может применяться схема для самолетов как с одним двигателем, так и для многодвигательных, как с подкрыльевым размещением двигателей, так и при размещении их по внутрифюзеляжной схеме, по схеме крепления к наружной части фюзеляжа, а также возможна комбинация из перечисленных схем.
Роботизированная авиационная универсальная система содержит несущую систему, включающую фюзеляж, крыло, хвостовое оперение, гондолы, куда помещают двигательные установки и шасси. Фюзеляж не имеет грузовой кабины в центральной части и не имеет кабины пилотов в передней части. В передней части фюзеляжа находится беспилотная система автоматизированного управления и передняя стойка трехточечного шасси. Стойка переднего шасси закреплена на вертикальной опоре. Сзади носовой части фюзеляжа и на переднем срезе хвостовой части также выполнены замки для крепления универсального модуль-контейнера в горизонтальной плоскости. В подфюзеляжном пространстве к силовому каркасу крепится система аварийного спасения полезной нагрузки, состоящая из отдельных автономных блоков по количеству крепящихся к ним универсальных модуль-контейнеров и в составе которых имеются замки для вертикального крепления универсальных модуль-контейнеров.
К верхней части фюзеляжа крепится крыло, под которым в левых и правых гондолах, по 2 с каждой стороны (при двухдвигательной подкрыльевой схеме), размещаются опоры убирающегося после взлета основного шасси с двумя высокими задними опорами, закрепленными в гондолах шасси, и два двигателя, размещенные в гондолах для двигателей.
Роботизированная авиационная универсальная система работает следующим образом. Для перевозки грузов или людей в универсальных модуль-контейнерах первый из них подается сзади по полету роботизированной авиационной универсальной системы в ее подфюзеляжное пространство между стойками основного шасси и устанавливается с помощью соответствующих узлов крепления, находящихся в его составе, к узлам крепления в составе конструктивных элементов носовой части фюзеляжа и соответствующего, ему блока системы аварийного спасения роботизированной авиационной универсальной системы. Последующие универсальные модуль-контейнеры также подаются сзади по полету роботизированной авиационной универсальной системы в ее подфюзеляжное пространство между стойками основного шасси и устанавливается с помощью соответствующих узлов крепления, находящихся в его составе, к узлам крепления в составе конструктивных элементов установленного предыдущего модуль-контейнера и соответствующего ему блока системы аварийного спасения роботизированной авиационной универсальной системы. Последний к хвостовой части летательного аппарата универсальный модуль-контейнер подается перпендикулярно оси летательного аппарата. При этом универсальные модуль-контейнеры за счет жесткого крепления с носовой и хвостовой частью фюзеляжа, блоками системы аварийного спасения и между собой образуют единую с роботизированной авиационной универсальной системой пассажирскую, грузовую или комбинированную часть фюзеляжа и выполняют все его функции. По команде и под контролем наземного оператора в соответствии с программой полета производится взлет роботизированной авиационной универсальной системы и выход ее на маршрут полета, после чего полет осуществляется в режиме автопилота до достижения зоны окончания маршрута. При вхождении в зону окончания маршрута наземный оператор этой зоны устанавливает контроль над роботизированной авиационной универсальной системой до момента ее посадки. В случае необходимости оператор может взять на себя управление роботизированной авиационной универсальной системой при взлете и посадке. При аварийной ситуации в полете автоматически размыкаются замки узлов крепления универсальных модуль-контейнеров между собой, а также одномоментно с ними замки узлов крепления универсального модуль-контейнера с узлами крепления в составе конструктивных элементов носовой и хвостовой части фюзеляжа, и замки крепления системы аварийного спасения отсоединяются от силового каркаса роботизированной универсальной системы. При отрыве системы аварийного спасения полезной нагрузки от силового каркаса происходит ее срабатывание, обеспечивающее мягкую посадку полезной нагрузки как на грунт, так и на воду за счет герметичности и положительной плавучести универсального модуль-контейнера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РОБОТИЗИРОВАННАЯ УНИВЕРСАЛЬНАЯ СИСТЕМА (ВРУС) | 2020 |
|
RU2754643C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ-КОНТЕЙНЕР ДЛЯ ВСЕХ ВИДОВ ТРАНСПОРТА | 2020 |
|
RU2764859C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ УНИВЕРСАЛЬНОГО МОДУЛЬ-КОНТЕЙНЕРА | 2020 |
|
RU2759187C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ СИСТЕМА ДЛЯ СПАСЕНИЯ ПАССАЖИРОВ, ЭКИПАЖА И ГРУЗОВ ПРИ АВАРИИ САМОЛЕТА В ВОЗДУХЕ | 1998 |
|
RU2152335C1 |
| САМОЛЕТ | 1996 |
|
RU2151716C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
| УНИВЕРСАЛЬНЫЙ КОРПУС ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2096261C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ | 2023 |
|
RU2807624C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ТРАНСПОРТИРОВКИ ГРУЗОВ | 2023 |
|
RU2833448C1 |
| АМФИБИЙНЫЙ ТРАНСПОРТНЫЙ АППАРАТ | 1999 |
|
RU2174080C2 |
Изобретение относится к авиационной технике. Роботизированная универсальная авиационная система содержит несущую систему, включающую фюзеляж, крыло, хвостовое оперение, гондолы с размещенными двигательными установками (6), убираемое шасси (7, 8). В носовой части фюзеляжа размещена система беспилотного автоматизированного управления. Сзади носовой и на переднем срезе хвостовой части фюзеляжа размещены замки крепления, унифицированные с системами крепления универсального модуль-контейнера в горизонтальной плоскости, при этом размещение в подфюзеляжном пространстве замков крепления в вертикальной плоскости обеспечивает возможность использования в качестве полезной нагрузки универсального модуль-контейнера как подвесного контейнера. Достигается повышение эффективности и безопасности перемещения людей и грузов. 4 з.п. ф-лы, 4 ил.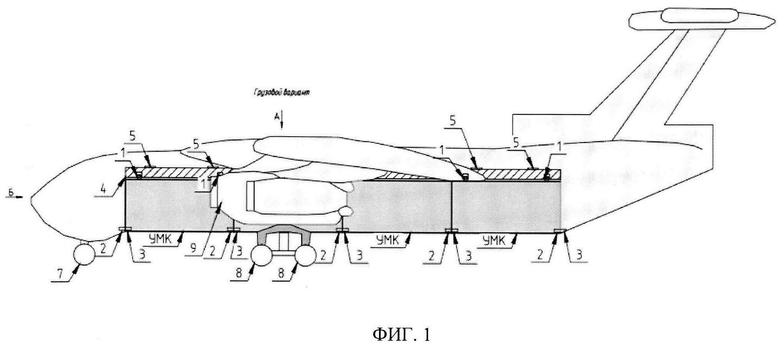
1. Роботизированная авиационная универсальная система, содержащая несущую систему, включающую фюзеляж, крыло, хвостовое оперение, гондолы с размещенными двигательными установками, убираемое шасси, и отличающаяся тем, что в носовой части фюзеляжа размещена система беспилотного автоматизированного управления, при этом сзади носовой и на переднем срезе хвостовой части фюзеляжа размещены замки крепления, унифицированные с системами крепления универсального модуль-контейнера в горизонтальной плоскости, при этом размещение в подфюзеляжном пространстве замков крепления в вертикальной плоскости обеспечивает возможность использования в качестве полезной нагрузки универсального модуль-контейнера как подвесного контейнера.
2. Система по п. 1, отличающаяся тем, что в подфюзеляжном пространстве путем крепления к силовому каркасу размещена система аварийного спасения полезной нагрузки, при этом крепление производится через замки, автоматически срабатывающие при аварийной ситуации в воздухе и приводящие к штатному срабатыванию систем мягкой посадки.
3. Система по п. 1, отличающаяся тем, что в составе системы аварийного спасения полезной нагрузки имеются замки, унифицированные с узлами крепления универсального модуль-контейнера для его вертикального крепления.
4. Система по п. 1, отличающаяся тем, что плоская поверхность донной части универсальных модуль-контейнеров за счет жесткого крепления между собой, с системой аварийного спасения и с силовым каркасом хвостовой и носовой части фюзеляжа, также имеющей плоскую донную часть, образует единый несущий фюзеляж.
5. Система по п. 1, отличающаяся тем, что наличие в ее составе узлов крепления полезной нагрузки, унифицированных с узлами крепления универсальных модуль-контейнеров грузового и пассажирского типа, обеспечивает возможность диверсификации транспортировки крупногабаритных грузов в виде универсальных модуль-контейнеров как по линии самолет-вертолет, так и другими видами транспорта.
| US 2002043587 A1, 18.04.2002 | |||
| WO 2017188911 A1, 22.11.2017 | |||
| Приспособление для испытания номеронабирателей для автоматов автоматических телефонных станций | 1929 |
|
SU33579A1 |
| RU 98108315 A, 10.02.2000 | |||
| ВЕРТОЛЕТ | 2000 |
|
RU2213027C2 |

