ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к блоку передачи движения для приводного механизма устройства для срезания волос и к устройству для срезания волос, содержащему соответствующий блок передачи движения. В частности, настоящее изобретение относится к блокам передачи движения, выполненным с возможностью передачи приводящего движения для комплекта лезвий устройства для срезания волос, в которых имеется определенный наклон между основной ориентацией входного вала и режущим лезвием (подвижным лезвием) (его нормалью) набора лезвий, приводимым в действие блоком передачи движения. Более конкретно, настоящее изобретение относится к усовершенствованиям приводных механизмов для устройств для срезания волос, имеющих несколько изогнутые или бананообразные корпуса, например, по эргономическим причинам, по соображениям конструкции изделия и/или по соображениям достижимости/видимости, но не следует понимать это в ограничивающем смысле.
Кроме того, в более общем смысле, настоящее изобретение также относится к приводным механизмам для устройств для срезания волос, которые выполнены с возможностью преобразования вращательного входного перемещения в возвратно-поступательное (колебательное) выходное перемещение, предпочтительно в целом линейное возвратно-поступательное выходное перемещение.
УРОВЕНЬ ТЕХНИКИ
В ЕР 2 123 408 А1 раскрыта машинка для стрижки волос, имеющая плоскость резания, образованную под углом от 10 до 70 градусов к продольной оси захватного элемента. Описан приводной механизм этого устройства, содержащий скользящий блок, выполненный в форме цилиндра, проходящего в направлении, вертикальном по отношению к приводному валу.
US 2006/0107530 А1 раскрывает электробритву возвратно-поступательного типа, содержащую наружный нож и внутренний нож, который совершает возвратно-поступательное движение при осуществлении скользящего контакта с внутренней поверхностью наружного ножа, причем бритва дополнительно содержит генератор колебаний, приводимый в возвратно-поступательное движение двигателем, установленным внутри основного корпуса указанной бритвы; центральный вал, который расположен в вертикальном положении на указанном генераторе колебаний и проходит к внутренней части указанного наружного ножа; держатель внутреннего ножа, который расположен с возможностью скольжения на указанном центральном валу таким образом, что удерживает на нем указанный внутренний нож, и указанный внутренний нож поворачивается вокруг прямой линии, перпендикулярной направлению возвратно-поступательного движения указанного внутреннего ножа; и пружину, которая расположена между указанным генератором колебаний и указанным держателем внутреннего ножа.
WO 2015/158681 А1 раскрывает соединительное устройство для приводного механизма устройства для срезания волос, содержащего приводной вал и невыравнивающийся выходной вал, причем указанное соединительное устройство содержит первый приводной соединительный элемент, выполненный с возможностью приведения в действие приводным валом, в частности, валом двигателя, передаточный вал, в частности, жесткий передаточный вал, содержащий первый приводимый соединительный элемент на первом конце и второй приводной соединительный элемент на втором конце, причем первый приводной соединительный элемент взаимодействует с первым приводимым соединительным элементом для приведения передаточного вала во вращательное движение и таким образом образует первое поворотное соединение, а второй приводной соединительный элемент выполнен с возможностью взаимодействия со вторым приводимым соединительным элементом выходного вала.
В соответствии с компоновкой, описанной в WO 2015/158681 А1, предлагается приводной механизм для устройства для срезания волос, который подходит для изогнутых или бананообразных корпусов. Таким образом, может быть обеспечено простое в обращении устройство, что облегчает работу с устройством и может быть полезным при применении для бритья и подравнивания.
Как показано в документах US 2006/0107530 A1 и WO 2015/158681 A1, приводной механизм для устройства для срезания волос, который выполнен с возможностью преобразования вращательного входного перемещения в возвратно-поступательное выходное перемещение для линейного возвратно-поступательного относительного перемещения между режущим лезвием (подвижным лезвием) и защитным лезвием (неподвижным лезвием), обычно содержит эксцентриковую часть на вращающемся входном приводном валу, причем эксцентриковая часть вращается вокруг продольной оси приводного вала. Вращательное перемещение эксцентриковой части преобразуется через рычаг наклона в возвратно-поступательное поворотное перемещение, которое затем преобразуется в целом в линейное возвратно-поступательное перемещение между двумя лезвиями комплекта лезвий.
С точки зрения преобразования движения лучше всего было бы расположить комплект лезвий в такой ориентации, чтобы элементы приводного механизма были в основном выровнены и/или ориентированы в целом параллельно друг другу. Таким образом, угловые смещения между соединенными элементами приводного механизма могут быть устранены.
Однако на практике часто имеется определенный угол наклона между основной ориентацией комплекта лезвий и приводным механизмом (т.е. приводным двигателем и соответствующим выходным валом) устройства для срезания волос. Как еще одно ограничение, часто корпус устройства не только удлинен, но и по меньшей мере слегка изогнут или имеет форму банана.
Таким образом, часто существуют конструктивные ограничения, которые приводят к определенному угловому смещению между входным валом и выходом (нормалью плоскости перемещения комплекта лезвий) блока передачи движения.
Согласно наблюдениям, с точки зрения принципов кинематики, смещение на значительный угол относительно друг друга соединительных элементов, которые, в то же время, выполнены с возможностью преобразования вращательного входного перемещения в возвратно-поступательное выходное перемещение, может приводить в качестве побочного эффекта к воздействию нежелательных сил и/или крутящих моментов на задействованные элементы. Это может увеличить нежелательное трение, износ, тепловыделение, энергопотребление и т.п. и снизить долговечность устройства и эксплуатационные характеристики.
Одним из вариантов преодоления этих конструктивных ограничений может быть обеспечение приводного механизма и, в частности, блока передачи движения с определенными зазорами и/или определенной деформируемостью. Таким образом, можно избежать чрезмерных нагрузок. Однако недостатком этого подхода является то, что приводной механизм устройства для срезания волос имеет несколько мягкий характер. С точки зрения характеристик резания предпочтительным является твердый и жесткий вид приводного механизма и задействованного блока передачи движения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание блока передачи движения для приводного механизма устройства для срезания волос, который улучшает общие характеристики резания устройства и который предпочтительно уменьшает внутреннее напряжение и нагрузки, которые связаны с кинематической конструкцией приводного механизма. Более предпочтительно, блок передачи движения включает в себя ступень преобразования, которая преобразует вращательное приводное входное движение в возвратно-поступательное (линейное или почти линейное) выходное перемещение.
Более предпочтительно, блок передачи движения обеспечивает возможность плавного хода приводного механизма и, следовательно, обеспечивает снижение уровня шума, снижение энергопотребления и увеличение срока службы.
В первом аспекте настоящего изобретения предлагается блок передачи движения для приводного механизма устройства для срезания волос, содержащий:
- входной вал, определяющий продольную ось и содержащий эксцентриковую часть, которая выполнена с возможностью вращения вокруг продольной оси при вращении входного вала,
- преобразователь движения, содержащий входное средство сопряжения преобразователя движения и выходное средство сопряжения преобразователя движения, и
- рычаг наклона, который установлен с возможностью поворота и содержит входное средство сопряжения рычага наклона и выходное средство сопряжения рычага наклона, которое взаимодействует с приводной частью комплекта лезвий устройства,
причем преобразователь движения расположен между входным валом и рычагом наклона,
эксцентриковая часть входного вала взаимодействует с входным средством сопряжения преобразователя движения,
выходное средство сопряжения преобразователя движения взаимодействует с входным средством сопряжения рычага наклона,
входное средство сопряжения преобразователя движения и выходное средство сопряжения преобразователя движения расположены на одном и том же продольном уровне относительно входного вала,
выходное средство сопряжения преобразователя движения содержит цилиндрическую часть, определяющую ось цилиндра, которая в основном параллельна оси поворота рычага наклона,
приводная часть комплекта лезвий выполнена в виде паза, который взаимодействует с выходным средством сопряжения рычага наклона; и
ось цилиндра головной части рычага наклона и ось цилиндра цилиндрической части преобразователя движения в целом параллельны оси поворота.
Следовательно, основная ориентация цилиндрической части преобразователя движения немного наклонена относительно основной ориентации вращающегося эксцентрикового пальца, который взаимодействует с входным средством сопряжения преобразователя движения.
Этот аспект основан на понимании того, что уменьшение продольного смещения между входным средством сопряжения и выходным средством сопряжения преобразователя движения оказывает положительное воздействие на кинематические условия блока передачи движения.
В результате можно сформировать блок передачи движения так, чтобы присутствовали главным образом линейные контакты между задействованными подвижными элементами. Это относится, в частности, к скользящим контактам блока передачи движения. Следовательно, может быть достигнуто уменьшение распределенной нагрузки. Кроме того, может быть достигнуто уменьшение износа, увеличение срока службы и обеспечение условий плавной работы.
В качестве еще одного потенциального преимущества точки контакта как входного вала, так и рычага наклона с преобразователем движения в целом находятся на одном уровне. Это приводит к тому, что на практике отсутствует значительный (продольный) рычаг, посредством которого может быть создан потенциально возмущающий крутящий момент.
Следовательно, отсутствует или почти отсутствует паразитный крутящий момент в преобразователе движения. Таким образом, неблагоприятные кинематические эффекты могут быть значительно уменьшены или даже устранены. Например, в преобразователе движения предпочтительно создается только линейная сила, вызывающая в основном возвратно-поступательное линейное перемещение. Напротив, если между входным средством сопряжения и выходным средством сопряжения преобразователя движения имеется определенный (продольный) рычаг, возмущающий крутящий момент будет по своей природе генерироваться, когда приводной механизм работает для приведения в действие комплекта лезвий устройства. Таким образом, поскольку уровень паразитных сил и крутящих моментов в значительной мере снижен, динамические нагрузки на задействованные компоненты могут быть значительно уменьшены, что положительно влияет на общие характеристики приводного механизма и устройства для срезания волос.
В более общем смысле, и в целом независимо от заданного положения и ориентации задействованных элементов приводного механизма устройства для срезания волос можно в соответствии с основными аспектами настоящего изобретения спроектировать блок передачи движения таким образом, чтобы улучшить условия контакта, особенно на средствах сопряжения преобразователя движения и рычага наклона. Таким образом, значительно улучшена свобода выбора конструкции. Кроме того, потенциально возмущающие моменты и крутящие моменты, которые, как правило, нелегко переносят элементы блока передачи движения, могут быть значительно уменьшены или даже устранены вследствие кинематической конструкции блока передачи движения.
Используемый в настоящей заявке термин "продольный уровень" относится к определенному положению на продольной оси. Таким образом, точки контакта (рабочие точки) взаимодействия как входного средства сопряжения преобразователя движения с входным валом, так и выходного средства сопряжения преобразователя движения с рычагом наклона расположены практически в одной точке на продольной оси входного вала.
Кроме того, следует отметить, что вышеприведенное также включает в себя схемы расположения, в которых входное средство сопряжения и выходное средство сопряжения преобразователя движения в целом находятся на одном продольном уровне. Эти варианты осуществления изобретения также могут обеспечить значительные усовершенствования.
Преобразователь движения в соответствии с вышеупомянутым аспектом расположен между входным валом и рычагом наклона с точки зрения передачи движения. Следовательно, входной вал взаимодействует с входным средством сопряжения преобразователя движения. Кроме того, выходное средство сопряжения преобразователя движения взаимодействует с рычагом наклона.
Входной вал также может называться выходным валом или ведущим валом. Следовательно, входной вал может быть образован выходным валом двигателя приводного механизма. В некоторых случаях между выходным валом двигателя и входным валом блока передачи движения могут быть установлены зубчатые колеса.
В целом, вышеописанная схема расположения может быть реализована в устройстве для срезания волос, имеющем входной вал, который не выровнен относительно приводной части подвижного лезвия (режущего лезвия) комплекта лезвий. Используемый в настоящей заявке термин "не выровнен" может относиться к определенному углу между плоскостью перемещения (плоскостью резания), совместно образуемой неподвижным лезвием и подвижным лезвием комплекта лезвий, и продольной осью входного вала. Углы смещения между ними могут находиться в диапазоне от более 0° (градусов) до менее 90°. Более конкретно, общий угол смещения между комплектом лезвий и входным валом может находиться, например, в диапазоне от 30° до 60°.
Несмотря на вышеприведенное определение, блок передачи движения в соответствии с вышеупомянутым аспектом также может быть реализован в устройстве для срезания волос, в котором угол смещения между плоскостью перемещения комплекта лезвий и продольной осью входного вала составляет 0° (т.е. параллельны) или 90° (т.е. перпендикулярны). Однако, в более общем случае, в целом любой угол между плоскостью перемещения комплекта лезвий и продольной осью входного вала может быть обеспечен блоком передачи движения.
В целом, по меньшей мере в основных вариантах осуществления изобретения блок передачи движения выполнен с возможностью обеспечения линейного или в целом линейного возвратно-поступательного перемещения между подвижным лезвием и неподвижным лезвием комплекта лезвий. Направление этого возвратно-поступательного перемещения в целом перпендикулярно продольной оси входного вала, что однако не должно интерпретироваться в ограничительном смысле.
Для обеспечения требуемых условий линейного контакта предпочтительно располагать ось цилиндра строго параллельно оси поворота рычага наклона. Это может включать в себя то, что ось цилиндра и ось поворота расположены под определенным углом относительно продольной оси, в частности, под углом более 0° и менее 90°, предпочтительно в диапазоне от 30° до 60°.
Эксцентриковая часть представляет собой эксцентриковый палец, причем входное средство сопряжения преобразователя движения представляет собой направляющий паз, с которым взаимодействует эксцентриковый палец. Эксцентриковый палец расположен на переднем конце входного вала на расстоянии от его продольной оси. Следовательно, при вращении входного вала эксцентриковый палец вращается вокруг продольной оси. Направляющий паз в преобразователе движения приспособлен к положению и размеру эксцентрикового пальца.
Еще в одном примерном варианте осуществления блока передачи движения преобразователь движения выполнен с возможностью преобразования вращательного перемещения эксцентриковой части входного вала в колебание, в частности линейное колебание, основное направление перемещения которого перпендикулярно продольной оси входного вала. Таким образом, преобразователь движения уже преобразует вращательное входное перемещение в возвратно-поступательное выходное перемещение на его выходном средстве сопряжения.
Еще в одном примерном варианте осуществления передачи движения в цилиндрической части выполнено проходящее в радиальном направлении углубление, которое образует направляющий паз, выполненный с возможностью взаимодействия с эксцентриковой частью входного вала. Иными словами, направляющий паз, выполненный с возможностью взаимодействия с эксцентриковым пальцем, проходит в цилиндрическую часть и может проходить через нее. Это приводит к тому, что точки контакта (или пятна линейного контакта/поверхностного контакта) между эксцентриковым пальцем и входным средством сопряжения преобразователя движения, а также между рычагом наклона и выходным средством сопряжения преобразователя движения в целом находятся на одном продольном уровне.
Иными словами, в более общем случае входное средство сопряжения преобразователя движения выполнен в виде направляющего паза или углубления в выходном средстве сопряжения преобразователя движения.
Еще в одном примерном варианте осуществления блока передачи движения входное средство сопряжения рычага наклона выполнено в виде вилки, которая охватывает по бокам выходное средство сопряжения преобразователя движения. Вилка содержит две в целом параллельные стороны, которые контактируют с цилиндрической частью преобразователя движения.
В этом контексте следует отметить, что в альтернативных вариантах осуществления изобретения вилка выполнена в преобразователе движения, тогда как цилиндрическая часть выполнена в рычаге наклона. В любом альтернативном варианте точки контакта между входным валом, преобразователем движения и рычагом наклона находятся на одном и том же продольном уровне или в целом на одном и том же продольном уровне относительно продольной оси входного вала.
Еще в одном примерном варианте осуществления блока передачи движения рычаг наклона поворачивается в плоскости поворота, которая в целом перпендикулярна его оси поворота. Плоскость поворота задана поворотным перемещением рычага наклона. Рычаг наклона имеет основное направление выдвижения, которое в целом параллельно плоскости поворота или выровнено с ней. Плоскость поворота можно рассматривать как плоскость, которая делит общий угол наклона между комплектом лезвий и продольной осью входного вала на две угловые части.
Первая угловая часть образована плоскостью перемещения комплекта лезвий и плоскостью поворота рычага наклона. Вторая угловая часть образована продольной осью входного вала и плоскостью поворота рычага наклона. Таким образом, достаточно большое угловое смещение между комплектом лезвий и входным валом блока передачи движения может быть разделено на два сегмента, с которыми легче справляться с точки зрения кинематики.
Еще в одном примерном варианте осуществления блока передачи движения плоскость поворота рычага наклона наклонена относительно продольной оси входного вала. Угол наклона может находиться в диапазоне от более 0° до менее 90°, предпочтительно в диапазоне от 15° до 75°, более предпочтительно в диапазоне от 30° до 60°.
Еще в одном другом примерном варианте осуществления блока передачи движения рычаг наклона прикреплен к поворотному подшипнику, который расположен в центральной части рычага наклона. Следовательно, рычаг наклона может быть расположен аналогично качающемуся рычагу, в котором входное средство сопряжения расположено на первом конце, а выходное средство сопряжения расположено на втором конце. В предпочтительном варианте осуществления изобретения элементы взаимодействия на входном средстве сопряжения и выходном средстве сопряжения рычага наклона выровнены с его осью поворота, так что соединительная линия между ними пересекает ось поворота.
Линейная компоновка может иметь преимущество, заключающееся в том, что при работе на рычаг наклона действуют, прежде всего, изгибающие моменты (вокруг поворотного подшипника), а не скручивающие силы. Жесткая конструкция рычага наклона для соответствующей компенсации и сопротивления изгибающим моментам в целом проста в реализации.
Еще в одном другом примерном варианте осуществления блока передачи движения выходное средство сопряжения рычага наклона выполнено как цилиндрическая часть, определяющая ось цилиндра, которая в основном параллельна оси поворота рычага наклона.
В альтернативных вариантах осуществления изобретения элементы, образующие приводную часть комплекта лезвий и выходное средство сопряжения рычага наклона, могут быть заменены. Таким образом, в рычаге наклона может быть выполнен паз, в то время как на приводной части комплекта лезвий может быть образована цилиндрическая часть.
Еще в одном примерном варианте осуществления блока передачи движения рычаг наклона наклонен относительно плоскости перемещения комплекта лезвий. Угол наклона рычага наклона определен плоскостью поворота рычага наклона. Угол наклона между рычагом наклона и плоскостью перемещения комплекта лезвий может находиться в диапазоне от более 0° до менее 90°, предпочтительно в диапазоне от 15° до 75°, более предпочтительно в диапазоне от 30° до 60°.
Еще в одном дополнительном примерном варианте осуществления блока передачи движения приводящая точка преобразователя движения и приводящая точка рычага наклона находятся практически в одной плоскости. Опять же, это предотвращает появление потенциально неблагоприятных паразитных крутящих моментов в блоке передачи движения. Термин "приводящая точка" может также называться точкой контакта, точкой взаимодействия (включающей точечный контакт, линейный контакт и поверхностный контакт).
Еще в одном другом примерном варианте осуществления блока передачи движения преобразователь движения выполнен с возможностью упругой установки и бокового соединения с корпусом устройства. Иными словами, преобразователь движения жестко прикреплен к корпусу, при этом преобразователь движения содержит деформируемые части, которые являются достаточно гибкими для обеспечения возвратно-поступательного перемещения его входного средства сопряжения и выходного средства сопряжения.
Преобразователь движения может быть выполнен как единое целое, т.е. предпочтительно выполнен в виде единой детали. Преобразователь движения может содержать гибкие части, которые, с одной стороны, могут обеспечивать определенное перемещение, а с другой стороны, могут создавать определенную силу упругого восстановления. Таким образом, преобразователь движения может обеспечивать как силу упругости, так и определенное демпфирующее воздействие из-за внутреннего трения.
Еще в одном аспекте настоящего изобретения представлено устройство для срезания волос, в частности электрическое устройство для срезания волос, содержащее корпус, режущую головку, прикрепленную к указанному корпусу, и приводной механизм, содержащий блок передачи движения в соответствии по меньшей мере с одним вариантом осуществления, раскрытым в настоящей заявке, причем режущая головка содержит комплект лезвий, приводной механизм выполнен с возможностью приведения в действие комплекта лезвий, когда режущая головка прикреплена к корпусу, и общее угловое смещение между плоскостью перемещения комплекта лезвий и продольной осью входного вала блока передачи движения разделено на (совокупность, включающую в себя) первый угол смещения между продольной осью входного вала и плоскостью поворота рычага наклона и второй угол смещения между плоскостью поворота рычага наклона и плоскостью перемещения комплекта лезвий.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на варианты осуществления, описанные далее. На нижеследующих чертежах:
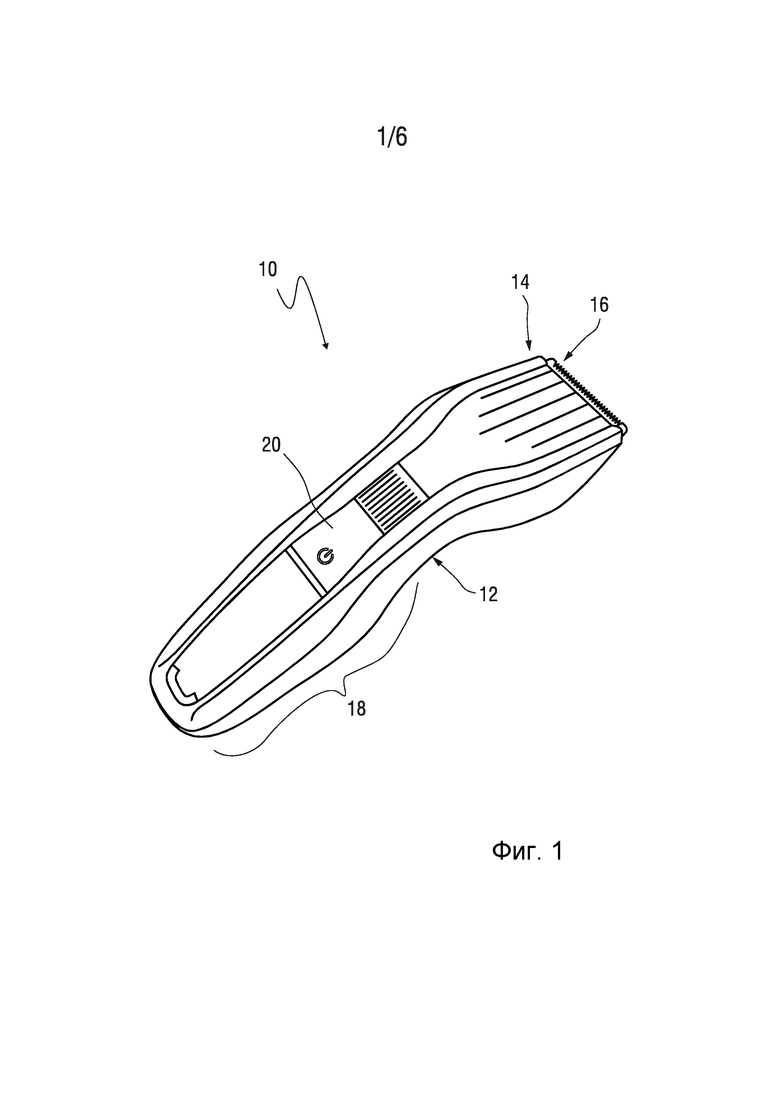
ФИГ. 1 схематически изображает перспективный вид примерного варианта осуществления электрического устройства для срезания волос;
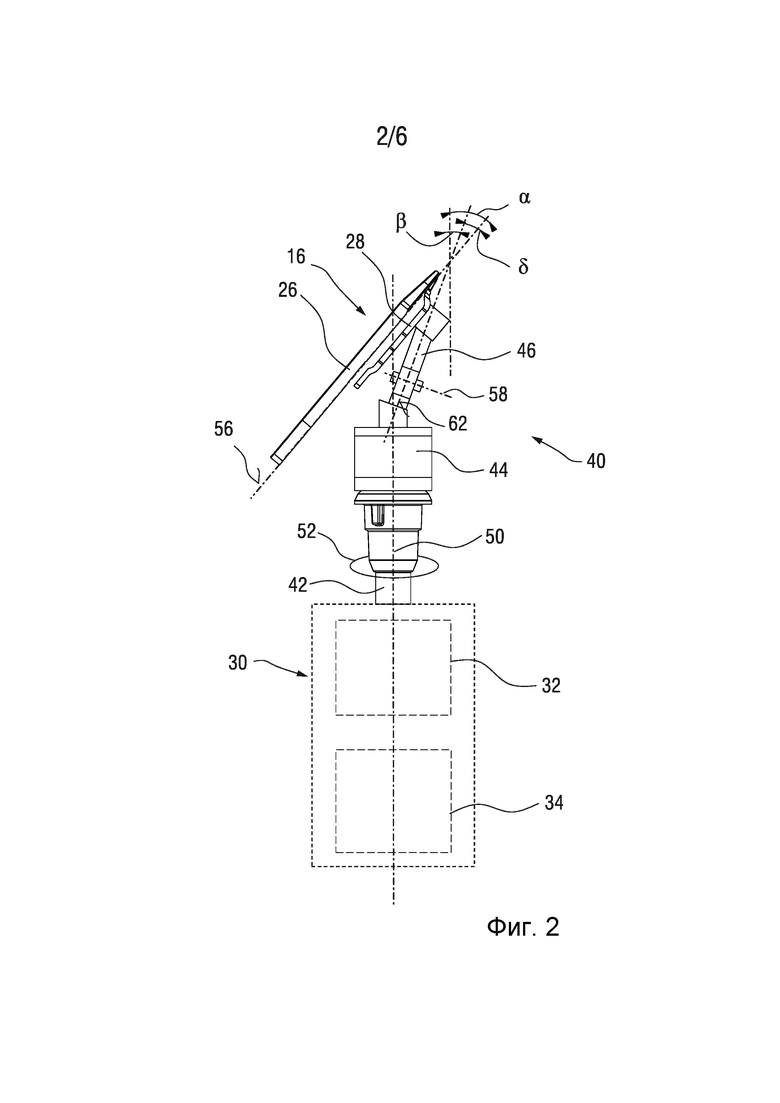
ФИГ. 2 изображает упрощенный вид сбоку приводного механизма устройства для срезания волос;
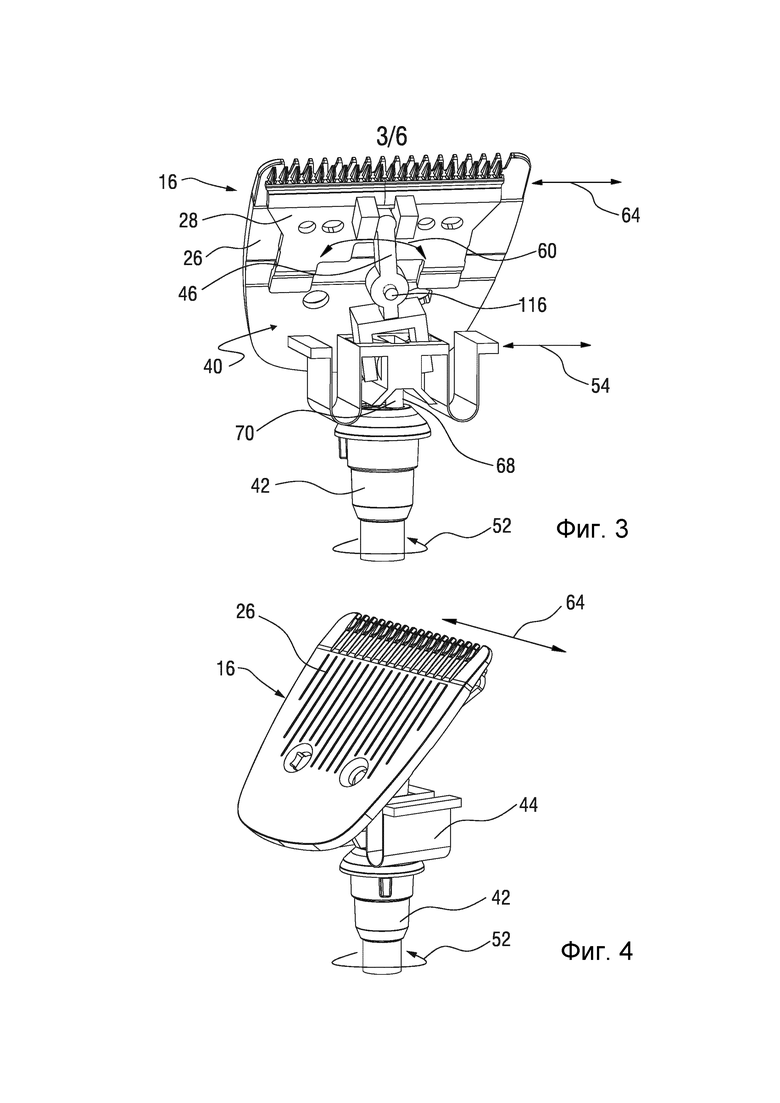
ФИГ. 3 изображает перспективный вид снизу варианта осуществления блока передачи движения для приводного механизма устройства для срезания волос;
ФИГ. 4 изображает перспективный вид сверху схемы расположения, представленной на ФИГ. 3;
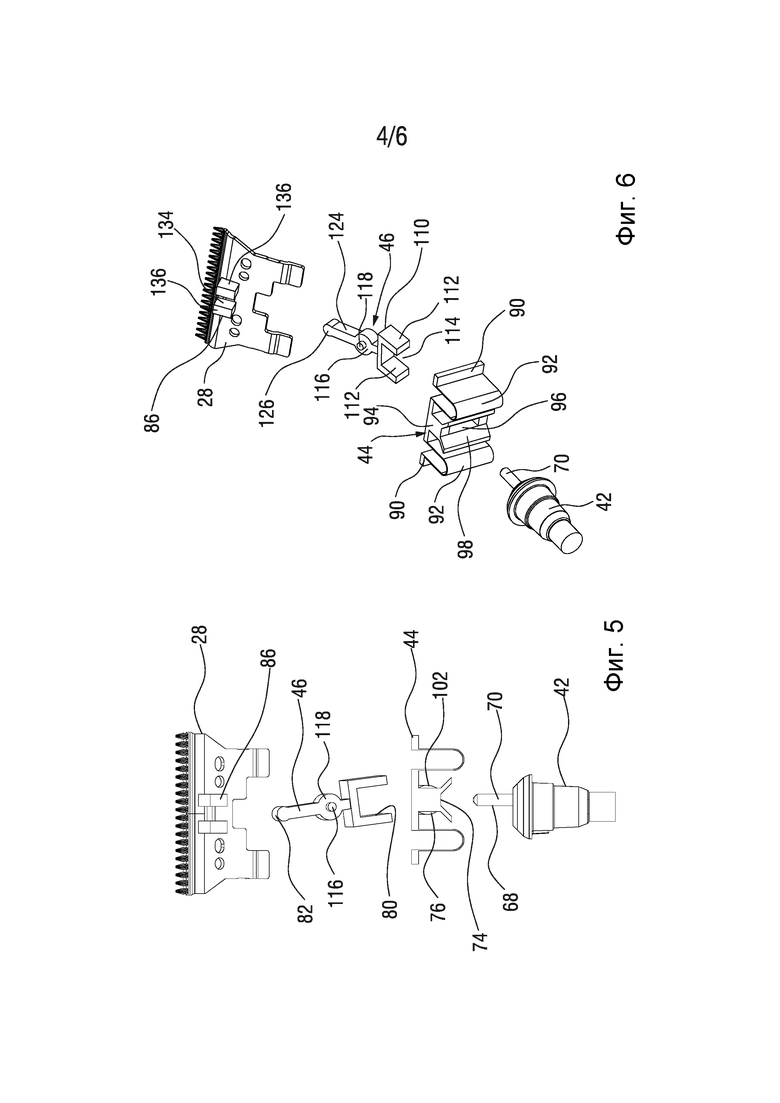
ФИГ. 5 изображает вид с пространственным разделением деталей блока передачи движения, представленного на ФИГ. 3, на котором уровень взгляда параллелен продольной оси входного вала и параллелен направлению приводящего движения режущего лезвия комплекта лезвий;
ФИГ. 6 изображает перспективный вид снизу схемы расположения, представленной на ФИГ. 5;
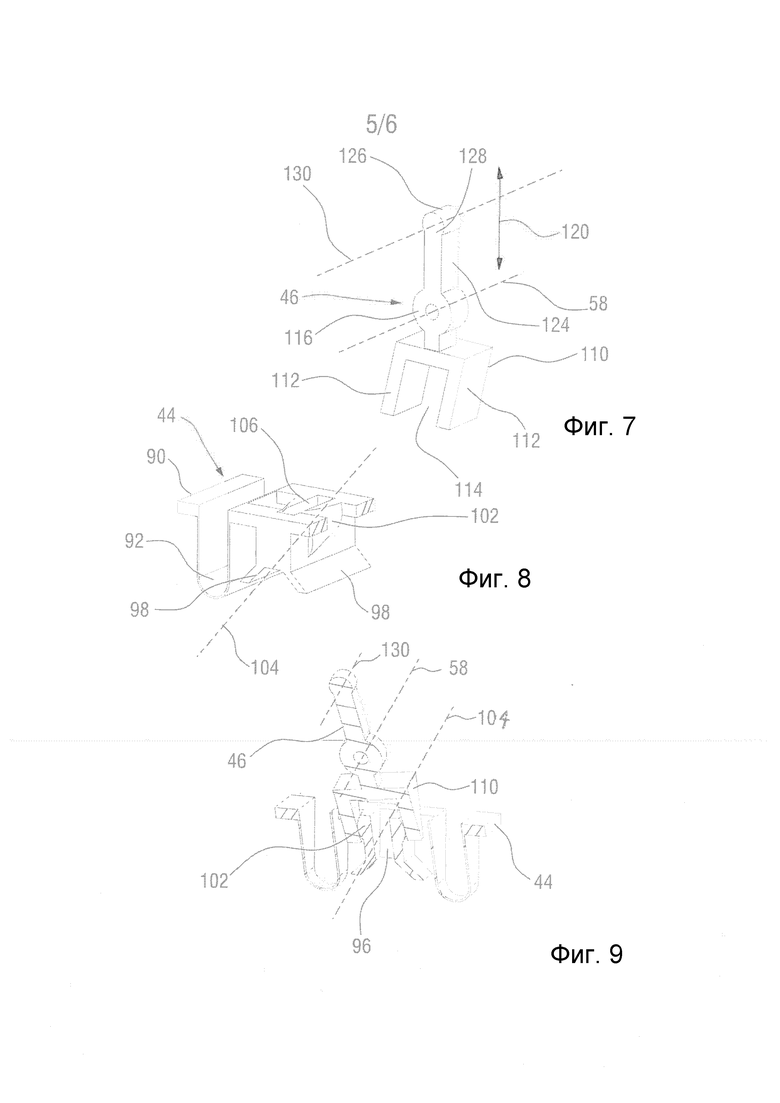
ФИГ. 7 изображает перспективный вид примерного варианта осуществления рычага наклона для блока передачи движения;
ФИГ. 8 изображает перспективный вид в разрезе примерного варианта осуществления преобразователя движения для блока передачи движения;
ФИГ. 9 изображает перспективный вид в разрезе рычага наклона, показанного на ФИГ. 7, и преобразователя движения, показанного на ФИГ. 8, в состоянии взаимодействия;
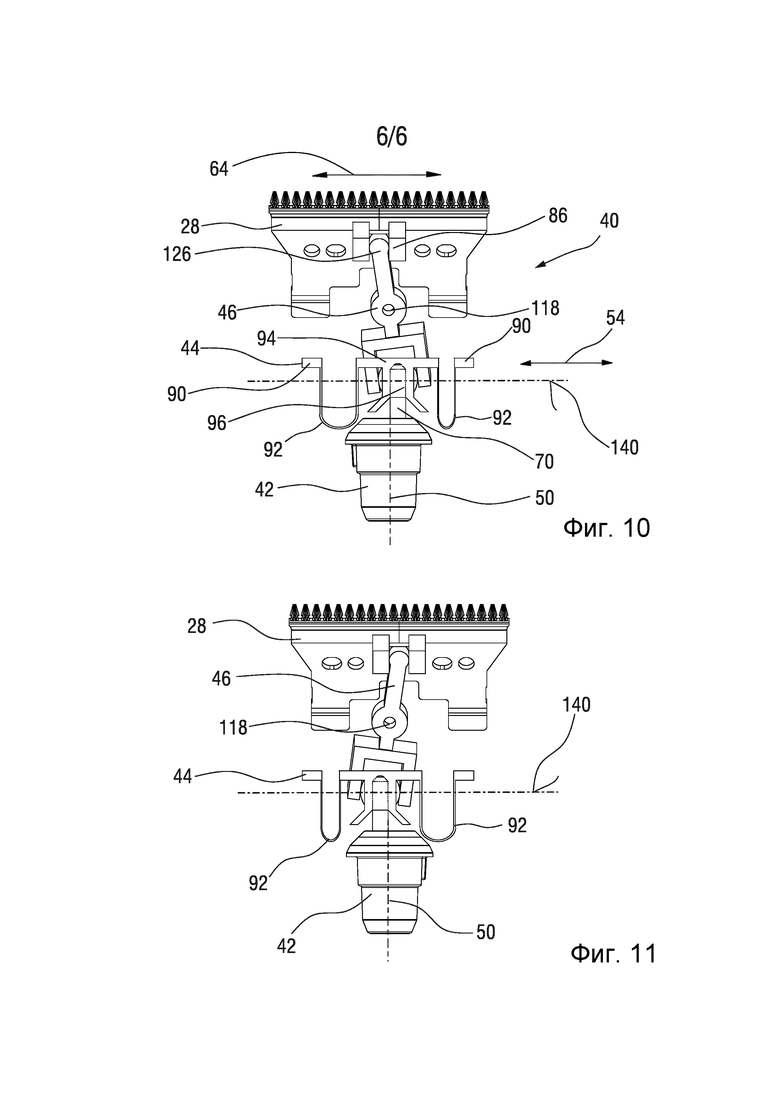
ФИГ. 10 изображает дополнительный вид схемы расположения, представленной на ФИГ. 5, в собранном состоянии в первом положении перемещения режущего лезвия; и
ФИГ. 11 изображает дополнительный вид схемы расположения, представленной на ФИГ. 10, во втором положении перемещения режущего лезвия.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На ФИГ. 1 показан перспективный вид устройства 10 для срезания волос. Устройство 10 содержит корпус 12. Кроме того, обеспечена режущая головка 14, которая расположена на корпусе 12 или прикреплена к нему. В режущей головке 14 расположен комплект 16 лезвий, содержащий неподвижное лезвие и режущее лезвие, которые выполнены с возможностью перемещения относительно друг друга для срезания волос.
На стороне корпуса 12, которая обращена в противоположную сторону от режущей головки 14, выполнен участок 18 в виде ручки. Кроме того, на корпусе 12 образованы элементы управления, обозначенные ссылочной позицией 20.
Как видно на ФИГ. 1, корпус 12 имеет в целом удлиненную и несколько изогнутую форму. Пользователь может захватывать устройство 10 на участке 18 в виде ручки и направлять устройство 10 соответствующим образом для срезания волос при помощи комплекта 16 лезвий.
Существует несколько конструктивных ограничений и целей конструкции для устройств 10 для срезания волос. Например, конструкция корпуса 12 в целом должна соответствовать целям проектирования промышленного образца, целям обеспечения эргономической конструкции и должна обеспечивать достаточное пространство для размещения в нем требуемых элементов устройства 10. Еще одной целью конструкции является обеспечение режущей головки 14, предпочтительно узкой для повышения доступности и видимости комплекта 16 лезвий.
В результате, довольно часто комплект 16 лезвий расположен в определенной ориентации таким образом, чтобы было обеспечено угловое смещение относительно входного вала приводного механизма. Следовательно, может потребоваться обеспечение блока передачи движения для передачи приводящего перемещения и для преобразования вращательного перемещения в возвратно-поступательное перемещения.
Далее более подробно описаны несколько аспектов и вариантов осуществления блока передачи движения для устройства 10 для срезания волос.
На ФИГ. 2 схематически изображен вид сбоку приводного механизма 30 для комплекта 16 лезвий устройства 10 для срезания волос. Комплект 16 лезвий содержит неподвижное лезвие (защитное лезвие) 26 и режущее лезвие (подвижное лезвие) 28. Приводной механизм 30 содержит двигатель 32 и по меньшей мере в некоторых вариантах осуществления изобретения батарею 34. Кроме того, в альтернативном или дополнительном варианте осуществления может быть обеспечен сетевой контакт. Двигатель 32 содержит выходной вал, который вращается при приведении в действие двигателя 32. Кроме того, в некоторых вариантах осуществления изобретения также могут быть обеспечены зубчатые колеса для преобразования выходного перемещения двигателя 32, если это необходимо.
Кроме того, блок 40 передачи движения является частью приводного механизма 30. Блок 40 передачи движения предназначен для двух целей. Во-первых, блок 40 передачи движения выполнен с возможностью преобразования вращательного входного перемещения в возвратно-поступательное выходное перемещение со стороны комплекта 16 лезвий. Кроме того, блок 40 передачи движения выполнен с возможностью компенсации и управления определенным наклоном и/или смещением между комплектом 16 лезвий и двигателем 32 приводного механизма 30. Иными словами, между двигателем 32 и комплектом 16 лезвий имеется определенное продольное расстояние, и по меньшей мере в некоторых вариантах осуществления изобретения между двигателем 32 и нормалью комплекта 16 лезвий имеется определенное угловое смещение.
Блок 40 передачи движения в соответствии с вариантом осуществления изобретения, показанным на ФИГ. 2, содержит входной вал 42, преобразователь 44 движения и рычаг 46 наклона. В этом контексте дополнительная ссылка сделана на перспективные виды блока 40 передачи движения, показанного на ФИГ. 3 и ФИГ. 4.
Входной вал 42 приводится в действие двигателем 32 и вращается вокруг продольной оси 50. Вращение входного вала 42 обозначено изогнутой стрелкой 52.
Входной вал 42 взаимодействует с преобразователем 44 движения таким образом, что преобразователь 44 движения совершает возвратно-поступательное движение при вращении входного вала 42, что показано двойной стрелкой 54 на ФИГ. 3.
Таким образом, вследствие взаимодействия входного вала 42 и преобразователя 44 движения вращательное перемещение входного вала 42 преобразуется в линейное возвратно-поступательное перемещение 54 преобразователя движения.
Рычаг 46 наклона выполнен с возможностью поворота вокруг оси 58 поворота, как показано на ФИГ. 2. Поворотное перемещение рычага 46 наклона обозначено изогнутой двойной стрелкой 60 на ФИГ. 3.
Поворотное действие рычага 46 наклона вызывает перемещение между режущим лезвием 28 и неподвижным лезвием 26 комплекта 16 лезвий. Неподвижное лезвие 26 и режущее лезвие 28 совместно образуют плоскость 56 перемещения на соответствующих контактных поверхностях между ними, как показано на ФИГ. 2.
Между плоскостью 56 перемещения и продольной осью 50 имеется угловое смещение α (альфа). Как правило, угол α может находиться в диапазоне от 0° до 90°. Предпочтительно угол α находится в диапазоне от 15° до 75°, более предпочтительно - в диапазоне от 30° до 60°.
Рычаг 46 наклона поворачивается в плоскости 62 поворота, которая перпендикулярна его оси 58 поворота. Плоскость 62 поворота может быть выровнена с основным направлением выдвижения рычага 46 наклона. Однако рычаг 46 наклона может быть по меньшей мере частично изогнут и/или иметь другую форму, отклоняющуюся от плоскости 62 поворота. Таким образом, ориентация оси 58 поворота определяет общую ориентацию плоскости 62 поворота.
Как можно видеть из ФИГ. 2, ориентация плоскости 62 поворота делит общее угловое смещение α на две секции, а именно на угол β (бета) между продольной осью 50 и плоскостью 62 поворота и угол * (дельта) между плоскостью 62 поворота и плоскостью 56 перемещения комплекта лезвий.
Следует отметить, что значения для углов α, β и *, показанных на ФИГ. 2, в основном представлены в иллюстративных целях. Специалистам в данной области техники понятно, что углы α, β и * могут варьироваться в широких пределах, тогда как секции β и * совместно образуют общее угловое смещение α.
Углы β и * секций не обязательно должны иметь одинаковое значение. Наоборот, основное преимущество по меньшей мере некоторых вариантов осуществления блока передачи движения, описанных в настоящей заявке, состоит в том, что возможен в значительной мере свободный выбор в отношении ориентации задействованных элементов блока 40 передачи движения, так что в конечном итоге могут быть соблюдены различные конструктивные ограничения.
Далее со ссылкой на ФИГ. 5 и ФИГ. 6 и с дополнительной ссылкой на ФИГ. 7, ФИГ. 8 и ФИГ. 9 более подробно описан примерный вариант осуществления блока 40 передачи движения.
На переднем конце входного вала 42 расположен эксцентриковый участок 68. Эксцентриковый участок 68 в варианте осуществления изобретения, показанном на ФИГ. 5 и 6, содержит эксцентриковый палец 70, основная ориентация которого параллельна основной ориентации входного вала 42. Однако палец 70 смещен относительно центра продольной оси 50. Таким образом, при вращении входного вала 42 палец 70 вращается вокруг продольной оси 50.
Эксцентриковый участок 68 входного вала 42 взаимодействует с входным средством 74 сопряжения преобразователя движения. Преобразователь 44 движения дополнительно содержит выходное средство 76 сопряжения, которая взаимодействует с входным средством 80 сопряжения рычага 46 наклона. Аналогичным образом, рычаг 46 наклона содержит выходное средство 82 сопряжения контакта, которое взаимодействует с приводной частью 86, образованной на режущем лезвии 28 комплекта 16 лезвий.
Преобразователь 44 движения в примерных вариантах осуществления выполнен как единое целое. Как правило, преобразователь 44 движения может содержать боковые разъемы 90, выполненные с возможностью присоединения к части корпуса устройства 10. Таким образом, боковые разъемы 90 обычно не перемещаются при приведении в действие преобразователя 44 движения. Кроме того, преобразователь 44 движения содержит упругие части 92, которые выполнены как изогнутые части в варианте осуществления, показанном на ФИГ. 5-9.
Между упругими частями 92 образован центральный блок 94. Когда преобразователь 44 движения приводят в действие эксцентриковой частью 68 входного вала 42, центральный блок 94 совершает линейное возвратно-поступательное перемещение между боковыми разъемами 90, что включает в себя деформацию упругих частей 92, расположенных между боковыми разъемами 90 и центральным блоком 94 соответственно.
Упругие части 92 обеспечивают преобразователю 44 движения, с одной стороны, определенную гибкость и, с другой стороны, определенную силу упругого восстановления. Кроме того, из-за собственного трения определенная характеристика демпфирования обеспечена общей компоновкой преобразователя 44 движения.
В центральном блоке 94 выполнен направляющий паз 96, который образует входное средство 74 сопряжения преобразователя движения. Направляющий паз 96 взаимодействует с пальцем 70 входного вала 42.
Кроме того, рядом с направляющим пазом 96 образованы наклонные стенки 98 на центральном блоке 94, которые могут служить в качестве вспомогательного средства для установки пальца 70.
В целом, на том же продольном уровне (относительно продольной оси 50 входного вала 42), где образован направляющий паз 96, в преобразователе 44 движения выполнена цилиндрическая часть 102, которая образует его выходное средство 76 сопряжения. Цилиндрическая часть 102 может также называться изогнутым участком, бочкообразным участком и т.д. Цилиндрическая часть 102 определяет ось 104 цилиндра, как показано на ФИГ. 8 и ФИГ. 9.
Как лучше всего видно на ФИГ. 8, направляющий паз 96 может проходить через цилиндрическую часть 102 и образовывать верхнее углубление 106. На ФИГ. 9 представлена цилиндрическая часть 102 в разрезе, на которой показано, что направляющий паз 96 проходит через нее как проходящее в радиальном направлении углубление. Следует отметить, что направляющий паз 96 необязательно должен полностью проходить через цилиндрическую часть 102.
Рычаг 46 наклона выполнен с возможностью поворота вокруг оси 58 поворота. На первом конце рычага 46 наклона расположена вилка 110, имеющая боковые плечи 112, которые образуют направляющее углубление 114 между ними. Вилка 110 входит в зацепление с цилиндрической частью 102 или охватывает ее. Иными словами, вилка 110 образует входную поверхность 80 контакта рычага 46 наклона.
В центральной части 116 рычага 46 наклона образован поворотный подшипник 118, который может включать в себя опорный палец. Поворотный подшипник 118 в конечном итоге определяет ось 58 поворота.
Основное направление ориентации рычага 46 наклона обозначено двойной стрелкой 120 на ФИГ. 7. Основное направление ориентации 120 в варианте осуществления изобретения, показанном на ФИГ. 7, в целом перпендикулярно оси 58 поворота. Однако нет необходимости в каждом случае проектировать рычаг 46 наклона таким образом, чтобы он идеально был выровнен с основным направлением 120 выдвижения.
Рычаг 46 наклона дополнительно содержит коромысло 124, которое в целом параллельно основному направлению 120 выдвижения и определяет это направление. Коромысло 124 проходит между первым концом и вторым концом рычага 146 наклона. На конце рычага 46 наклона, который обращен в противоположную сторону от вилки 110, образована головная часть 126, которая выполнена в виде цилиндрической головной части. Головная часть 126 образует выходную поверхность 82 контакта рычага 46 наклона. Как показано на ФИГ. 7, головная часть 126 образует цилиндрический участок 128, который определяет ось 130 цилиндра. Ось 130 цилиндра параллельна оси 58 поворота.
В этом контексте далее сделана ссылка на ФИГ. 9. Предпочтительно, по меньшей мере в некоторых вариантах осуществления изобретения, и ось 130 цилиндра головной части 126 рычага 46 наклона, и ось 104 цилиндра цилиндрической части 102 преобразователя 44 движения в целом параллельны оси 58 поворота. Это приводит к тому, что при работе блока 40 передачи движения обеспечен плавный ход, и практически отсутствуют паразитные силы и моменты.
Далее снова сделана ссылка на ФИГ. 6. Выходное средство 82 сопряжения рычага 46 наклона взаимодействует с приводной частью 86, которая выполнена на режущем лезвии 28. Приводная часть 86 в варианте осуществления изобретения, показанном на ФИГ. 6, образована двумя противоположными боковыми стенками 136, которые образуют паз 134 между ними. Цилиндрическая головная часть 126 рычага 46 наклона взаимодействует с пазом 134 приводной части 86 для осуществления линейного возвратно-поступательного перемещения 64 режущего лезвия 28 относительно неподвижного лезвия 26.
Дополнительная ссылка сделана на ФИГ. 10 и ФИГ. 11, соответственно изображающие противоположные положения перемещения (крайние боковые положения) режущего лезвия 28. На ФИГ. 11 входной вал 42 повернут примерно на 180° относительно положения, показанного на ФИГ. 10.
На ФИГ. 10 центральный блок 94 преобразователя 44 движения перемещен в крайнее правое положение, тогда как режущее лезвие 28 перемещено в крайнее левое положение вследствие углового смещения рычага 46 наклона. В отличие от этого, на ФИГ. 11 центральный блок 94 преобразователя 44 движения перемещен в крайнее левое положение, тогда как режущее лезвие 28 перемещено в крайнее правое положение.
Упругие части 92 преобразователя 44 движения соответственно деформируются, когда центральный блок 94 совершает возвратно-поступательное движение (стрелка 54) при вращении входного вала 42, которое вызывает вращение эксцентрикового пальца 70.
На ФИГ. 10 и ФИГ. 11 ссылочная позиция 140 обозначает продольный уровень контакта как эксцентриковой части (пальца 70) входного вала 42 с входным средством сопряжения (направляющим пазом 96) преобразователя 44 движения, так и выходного средства сопряжения (цилиндрической части 102) преобразователя 44 движения с входным средством сопряжения (вилкой 110) рычага 46 наклона. В результате выровненного расположения соответствующих пятен контакта на преобразователь 44 движения воздействуют либо незначительные, либо вообще не воздействуют никакие паразитные силы и/или крутящие моменты, что значительно улучшает общую плавность работу и эксплуатационные характеристики блока 40 передачи движения.
Точки привода или взаимодействия входного вала 42 (пальца 70), преобразователя 44 движения (паза 96 и цилиндрической части 102) и рычага 46 наклона (вилки 110) расположены в целом на одном продольном уровне. Специалистам в данной области техники понятно, что могут быть небольшие отклонения, поскольку, например, точки контакта вилки 110 по меньшей мере слегка смещаются от общего продольного уровня 140 при повороте рычага 44 наклона. Таким образом, общий продольный уровень 140 также можно рассматривать как (довольно узкий) продольный диапазон.
Несмотря на то, что изобретение изображено и описано подробно на чертежах и в предшествующем описании, такое изображение и описание должно считаться иллюстративным или примерным, а не ограничительным; настоящее изобретение не ограничено представленными вариантами осуществления. Другие вариации раскрытых вариантов осуществления изобретения могут быть поняты и реализованы специалистами в данной области техники при осуществлении настоящего изобретения на практике на основании изучения чертежей, текста описания и прилагаемой формулы изобретения.
В пунктах формулы изобретения слово "содержащий" не исключает другие элементы или этапы, а грамматические средства выражения единственного числа не исключают множественное число. Отдельный элемент или другой блок может выполнять функции нескольких изделий, указанных в формуле изобретения. Сам факт того, что определенные меры изложены во взаиморазличных зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой.
Никакие ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ ПРОРЕЖИВАЮЩИЙ ГРЕБЕНЬ, ПРИВОД РЕГУЛИРОВКИ И ПРИБОР СТРИЖКИ ВОЛОС | 2015 |
|
RU2676370C2 |
| НАСАДКА-ГРЕБЕНЬ И УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ВОЛОС | 2015 |
|
RU2679158C2 |
| УСТРОЙСТВО ДЛЯ СТРИЖКИ ВОЛОС | 2013 |
|
RU2638717C2 |
| Устройство для срезания волос | 2019 |
|
RU2769384C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СРЕЗАНИЯ ВОЛОС | 2019 |
|
RU2765423C1 |
| РЕЖУЩАЯ ГОЛОВКА И УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ВОЛОС | 2015 |
|
RU2651550C1 |
| ГРЕБЕНЧАТАЯ НАСАДКА, РЕЖУЩАЯ ГОЛОВКА И УСТРОЙСТВО ДЛЯ СРЕЗАНИЯ ВОЛОС | 2018 |
|
RU2754565C2 |
| БРИТВЕННАЯ ГОЛОВКА С ПОВОРОТНЫМ БРИТВЕННЫМ БЛОКОМ | 2014 |
|
RU2657883C2 |
| БРИТВА | 1991 |
|
RU2098265C1 |
| КОМПЛЕКТ ЛЕЗВИЙ И УСТРОЙСТВО ДЛЯ СТРИЖКИ ВОЛОС | 2014 |
|
RU2676375C2 |
Изобретение относится к области устройств для срезания волос. Блок передачи движения для приводного механизма устройства для срезания волос содержит входной вал с эксцентриковой частью, преобразователь движения и рычаг наклона. Преобразователь движения включает входное и выходное средства сопряжения преобразователя движения. Рычаг наклона содержит входное и выходное средства сопряжения рычага наклона. Выходное средство рычага наклона взаимодействует с приводной частью комплекта лезвий устройства для срезания волос. Эксцентриковая часть входного вала взаимодействует с входным средством сопряжения преобразователя движения. Выходное средство сопряжения преобразователя движения взаимодействует с входным средством сопряжения рычага наклона. Выходная поверхность контакта преобразователя движения содержит цилиндрическую часть. Выходное средство сопряжения рычага наклона выполнено в виде цилиндрической части, определяющей ось цилиндра. Ось цилиндра головной части рычага наклона и ось цилиндра цилиндрической части преобразователя движения параллельны оси поворота. Техническим результатом изобретений является улучшение характеристик резания устройства для срезания волос. 2 н. и 11 з.п. ф-лы, 11 ил.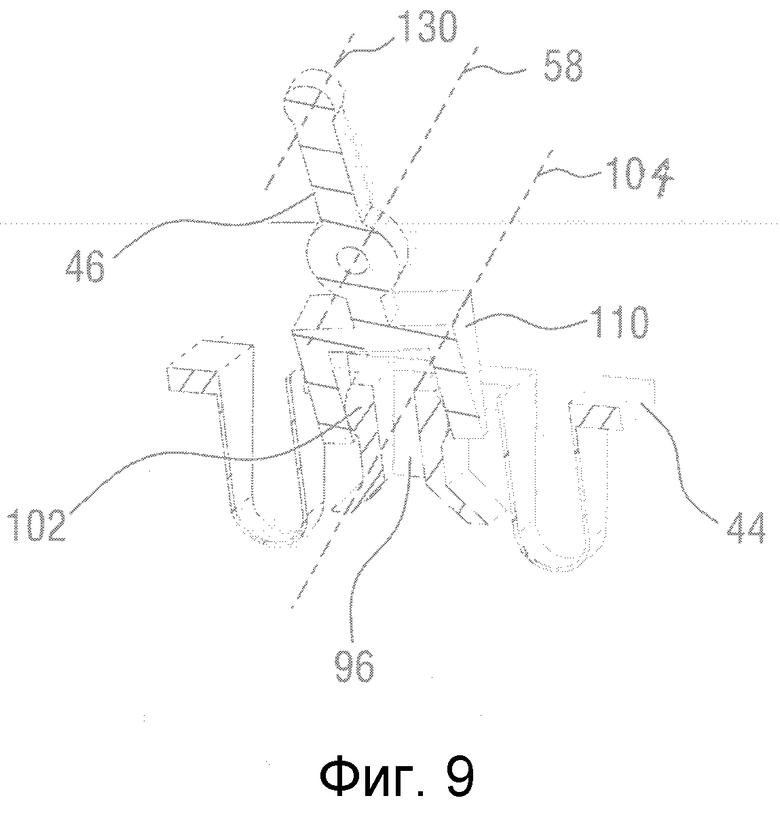
1. Блок (40) передачи движения для приводного механизма (30) устройства (10) для срезания волос, содержащий:
- входной вал (42), определяющий продольную ось (50) и содержащий эксцентриковую часть (68), которая выполнена с возможностью вращения вокруг продольной оси (50) при вращении входного вала (42),
- преобразователь (44) движения, содержащий входное средство (74) сопряжения преобразователя движения и выходное средство (76) сопряжения преобразователя движения, и
- рычаг (46) наклона, который установлен с возможностью поворота и содержит входное средство (80) сопряжения рычага наклона и выходное средство (82) сопряжения рычага наклона, которое выполнено с возможностью взаимодействия с приводной частью (86) комплекта (16) лезвий устройства (10),
при этом:
преобразователь (44) движения расположен между входным валом (42) и рычагом (46) наклона,
эксцентриковая часть (68) входного вала (42) взаимодействует с входным средством (74) сопряжения преобразователя движения,
выходное средство (76) сопряжения преобразователя движения взаимодействует с входным средством (80) сопряжения рычага наклона,
входное средство (74) сопряжения преобразователя движения и выходное средство (76) сопряжения преобразователя движения расположены на одном и том же продольном уровне (140) относительно входного вала (42),
выходное средство (76) сопряжения преобразователя движения содержит цилиндрическую часть (102), определяющую ось (104) цилиндра, которая параллельна оси (58) поворота рычага (46) наклона,
выходное средство (82) сопряжения рычага наклона выполнено в виде цилиндрической части (126), определяющей ось (130) цилиндра, которая параллельна оси (58) поворота рычага (46) наклона,
ось (130) цилиндра головной части (126) рычага (46) наклона и ось (104) цилиндра цилиндрической части (102) преобразователя (44) движения параллельны оси (58) поворота,
причем эксцентриковая часть (68) представляет собой эксцентриковый палец (70), а входное средство (74) сопряжения преобразователя движения представляет собой направляющий паз (96), с которым взаимодействует эксцентриковый палец (70).
2. Блок (40) передачи движения по п. 1, в котором преобразователь (44) движения выполнен с возможностью преобразования вращательного движения эксцентриковой части (68) входного вала (42) в колебание, в частности линейное колебание, основное направление (54) перемещения которого перпендикулярно продольной оси (50) входного вала (42).
3. Блок (40) передачи движения по п. 1, в котором в цилиндрической части (102) выполнено проходящее в радиальном направлении углубление (106), которое образует направляющий паз (96), выполненный с возможностью взаимодействия с эксцентриковой частью (68) входного вала (42).
4. Блок (40) передачи движения по любому из пп. 1-3, в котором входное средство (80) сопряжения рычага наклона выполнено в виде вилки (110), которая охватывает по бокам выходное средство (76) сопряжения преобразователя движения.
5. Блок (40) передачи движения по любому из пп. 1-4, в котором рычаг (46) наклона выполнен с возможностью поворота в плоскости поворота, которая перпендикулярна его оси (58) поворота.
6. Блок (40) передачи движения по п. 5, в котором плоскость поворота рычага (46) наклона наклонена относительно продольной оси (50) входного вала (42).
7. Блок (40) передачи движения по любому из пп. 1-6, в котором рычаг (46) наклона прикреплен к поворотному подшипнику (118), который расположен в центральной части (116) рычага (46) наклона.
8. Блок (40) передачи движения по любому из пп. 1-7, в котором выходное средство (82) сопряжения рычага (46) наклона выполнено с возможностью взаимодействия с приводной частью (86) комплекта (16) лезвий, выполненной в виде паза (134).
9. Блок (40) передачи движения по любому из пп. 1-8, в котором рычаг (46) наклона наклонен относительно плоскости перемещения комплекта (16) лезвий.
10. Блок (40) передачи движения по любому из пп. 1-9, в котором приводящая точка преобразователя (44) движения и приводящая точка рычага (46) наклона находятся в одной плоскости (140).
11. Блок (40) передачи движения по любому из пп. 1-10, в котором преобразователь (44) движения выполнен с возможностью упругой установки и бокового соединения с корпусом (12) указанного устройства (10).
12. Устройство (10) для срезания волос, содержащее корпус (12), режущую головку (14), прикрепленную к указанному корпусу (12), и приводной механизм (30), содержащий блок (40) передачи движения по любому из пп. 1-11, при этом режущая головка (14) содержит комплект (16) лезвий, приводной механизм (30) выполнен с возможностью приведения в действие комплекта (16) лезвий, когда режущая головка (14) прикреплена к корпусу (12), и общее угловое смещение между плоскостью перемещения комплекта (16) лезвий и продольной осью (50) входного вала (42) блока (40) передачи движения разделено на первый угол смещения между продольной осью (50) входного вала (42) и плоскостью поворота рычага (46) наклона и второй угол смещения между плоскостью поворота рычага (46) наклона и плоскостью перемещения комплекта (16) лезвий.
13. Устройство (10) для срезания волос по п. 12, представляющее собой электрическое устройство (10) для срезания волос.
| СПОСОБ ИЗГОТОВЛЕНИЯ СПЕЧЕННЫХ ВТУЛОК С ВНУТРЕННЕЙ ВЫЕМКОЙ | 1997 |
|
RU2123408C1 |
| ЭЛЕКТРОБРИТВА | 1998 |
|
RU2175602C1 |
| US 5259116 A, 09.11.1993 | |||
| СПЛАВ НА ОСНОВЕ ЖЕЛЕЗА | 2008 |
|
RU2378407C1 |

