Область техники
Настоящее изобретение относится, в целом, к электрофизиологическому картированию и, в частности, к электрофизиологическому картированию сердца.
Уровень техники
Инвазивные методы кардиологии для картирования электрофизиологических (ЭФ) свойств сердечной ткани были ранее предложены в патентной литературе. Например, в публикации заявки на патент США № 2017/0042449 описана система и способ определения локальных ЭФ характеристик сердечного субстрата с использованием многоэлектродных катетеров. Система выбирает по меньшей мере одну группировку электродов из множества электродов для получения по меньшей мере одного независимого от ориентации сигнала от по меньшей мере одной группировки электродов из объема информации, соответствующего взвешенным частям сигналов электрограммы. Система отображает или выводит пользователю или процессу независимую от ориентации катетера электрофизиологическую информацию.
В качестве другого примера в публикации заявки на патент США № 2015/0366476 описана система и способ картирования электрической активности сердца. Система может включать в себя ствол катетера с множеством электродов. Процессор системы может быть выполнен с возможностью сбора набора сигналов от по меньшей мере одного из множества электродов. Набор сигналов может быть собран на протяжении периода времени. Процессор также может быть выполнен с возможностью расчета, исходя из набора сигналов, по меньшей мере одного вектора распространения, генерирования набора данных из по меньшей мере одного вектора распространения, генерирования статистического распределения набора данных и генерирования визуального представления статистического распределения, такого как круговая гистограмма углов. Направление (например, угол распространения) и скорость распространения клеточного волнового фронта могут быть определены путем сравнения времен активации, регистрируемых электродами, близлежащими к целевому электроду, для которого определяется вектор распространения.
В публикации заявки на патент США № 2017/0202470 описана система и способ идентификации фокальных источников. Способ может включать в себя обнаружение посредством датчиков сигналов электрокардиограммы (ЭКГ) в зависимости от времени, причем каждый сигнал ЭКГ, обнаруженный посредством одного из датчиков имеет местоположение в сердце и указывает на электрическую активность сердца, при этом каждый сигнал содержит по меньшей мере R волну и S волну; построение карты R-S, содержащей отношение R к S для каждого из сигналов ЭКГ, причем отношение R к S включает в себя отношение абсолютной величины R волны к абсолютной величине S волны; идентификацию для каждого из сигналов ЭКГ времен локальной активации (LAT); и коррелирование отношений R к S для сигналов ЭКГ на карте R-S и идентифицированных LAT, и использовании корреляции для идентификации фокальных источников.
В публикации заявки на патент США № 2017/0281031 описано электроанатомическое картирование, выполняемое путем введения многоэлектродного зонда в сердце живого субъекта, регистрации электрограмм одновременно от электродов в соответствующих местоположениях в сердце, разграничения соответствующих интервалов времени активации в электрограммах, генерирования карты распространения электрических волн на основании интервалов времени активации, максимизации когерентности волн путем корректировки времен локальной активации в пределах интервалов времени активации электрограмм и отображения исправленных времен локальной активации.
В публикации заявки на патент США № 2004/0243012 описан способ и система идентификации и локализации перешейка в круге re-entry в сердце субъекта во время синусного ритма. Способ может включать в себя (а) прием сигналов электрограммы от сердца во время синусного ритма посредством электродов, (b) построение карты на основании сигналов электрограммы, (c) определение на основании карты местоположения перешейка в круге re-entry в сердце и (d) отображение местоположения перешейка в круге re-entry.
Сущность изобретения
В одном из вариантов осуществления настоящего изобретения предложен способ, включающий прием посредством множества электродов в сердце совокупности данных наблюдения, причем каждые данные наблюдения содержат множество электрофизиологических (ЭФ) сигналов, измеренных электродами. Для каждых данных наблюдения оценивают соответствующее направление прихода (DOA) и соответствующее расстояние относительно электродов, от которых исходило множество ЭФ-сигналов. Данные наблюдения агрегируют с образованием статистического распределения данных наблюдения в зависимости от оцененного DOA и расстояния. С использованием статистического теста проверяют, является ли статистическое распределение данных наблюдения непротиворечивым в соответствии с заданным критерием непротиворечивости. На основании статистического распределения получают оцененное местоположение в сердце фокального источника аритмогенной активности, который генерировал принятые ЭФ-сигналы, если статистическое распределение данных наблюдения признано непротиворечивым. Расчетное местоположение фокального источника накладывают на анатомическую карту по меньшей мере части сердца.
В некоторых примерах осуществления оценивание DOA и расстояния для заданных данных наблюдения включает извлечение из множества ЭФ-сигналов в заданных данных наблюдения соответствующего множества относительных времен прихода и оценивание DOA и расстояния с использованием извлеченных относительных времен прихода.
В некоторых примерах осуществления агрегирование данных наблюдения включает предварительную фильтрацию данных наблюдения в соответствии с соответствующим множеством относительных времен прихода, извлеченных из каждых данных наблюдения, и включение в статистическое распределение данных наблюдения только предварительно отфильтрованных данных наблюдения.
В одном примере осуществления предварительная фильтрация данных наблюдения в соответствии с извлеченным множеством относительных времен прихода включает стадии, на которых: (a) используя оцененное DOA и расстояние, рассчитывают для каждых данных наблюдения смоделированное множество относительных времен прихода, которые бы являлись результатом ЭФ-волны, исходящей от фокального источника при оцененных DOA и расстоянии, и (b) определяют степень сходства между извлеченным множеством и смоделированным множеством относительных времен прихода путем применения заданного геометрического теста для каждых данных наблюдения.
В некоторых примерах осуществления оценивание степени сходства включает расчет геометрического теста на косинусное сходство между двумя множествами. В других примерах осуществления оценивание степени сходства включает расчет погрешности оценивания для каждого относительного времени прихода и сравнение погрешности оценивания с заданным пороговым значением.
В одном примере осуществления способ дополнительно включает использование смоделированного множества относительных времен прихода, корректировку значений времени аннотаций по ЭФ-сигналам, для которых наклон напряжение-время ЭФ-сигнала является более пологим, чем предварительно заданный наклон.
В другом примере осуществления предварительная фильтрация данных наблюдения включает исключение одних или более данных наблюдения, определенных как имеющие неподобные множества времен прихода.
В некоторых примерах осуществления получение расчетного местоположения включает подбор кривой к статистическому распределению и нахождение максимального значения кривой в зависимости от оцененного DOA и расстояния.
В некоторых примерах осуществления оценивание DOA и расстояния включает минимизацию функции стоимости. В других примерах осуществления минимизация функции стоимости включает минимизацию взвешенной функции стоимости. В дополнительных примерах осуществления минимизация функции стоимости включает итерационную минимизацию функции стоимости путем удаления в каждой итерации значения ЭФ-сигнала, имеющего наибольшую погрешность оценивания.
В одном примере осуществления получение расчетного местоположения включает применение к статистическому распределению анализа методом k-средних, проецирование расчетных местоположений на анатомическую область и выбор местоположения, имеющего проецируемое расстояние, которое меньше заданного значения.
В соответствии с примером осуществления настоящего изобретения дополнительно предложена система, включающая в себя интерфейс и процессор. Интерфейс выполнен с возможностью приема совокупности данных наблюдения, полученных множеством электродов в сердце, причем каждые данные наблюдения включают в себя множество электрофизиологических (ЭФ) сигналов. Процессор выполнен с возможностью: (a) оценивания для каждых данных наблюдения соответствующего направления прихода (DOA) и соответствующего расстояния относительно электродов, от которых исходило множество ЭФ-сигналов, (b) агрегирования данных наблюдения с образованием статистического распределения данных наблюдения в зависимости от оцененного DOA и расстояния, (c) проверки с использованием статистического теста, является ли статистическое распределение данных наблюдения непротиворечивым в соответствии с заданным критерием непротиворечивости, (d) получения на основании статистического распределения расчетного местоположения в сердце фокального источника аритмогенной активности, который генерировал принятые ЭФ-сигналы, если статистическое распределение данных наблюдения признано непротиворечивым, и (e) наложения расчетного местоположения фокального источника на анатомическую карту по меньшей мере части сердца.
В другом примере осуществления настоящего изобретения предложен способ, включающий прием посредством множества электродов в сердце совокупности данных наблюдения, причем каждые данные наблюдения включают в себя множество электрофизиологических (ЭФ) сигналов, измеренных электродами. Соответствующее направление прихода (DOA) и соответствующее расстояние относительно электродов, от которых исходило множество ЭФ-сигналов, оценивают по меньшей мере для некоторых из данных наблюдения. На основании оцененного DOA и расстояния оценивают погрешность отметки времени по меньшей мере в одном ЭФ-сигнале среди ЭФ-сигналов. Отметку времени ЭФ-сигнала исправляют так, чтобы она соответствовала оцененному DOA и расстоянию и исправляла погрешность. С использованием множества ЭФ-сигналов, включающего исправленный ЭФ-сигнал, формируют ЭФ-карту по меньшей мере части сердца.
В некоторых примерах осуществления формирование ЭФ-карты включает формирование карты времен локальной активации (LAT).
В некоторых примерах осуществления оценивание DOA и расстояния включает получение DOA и расстояния, которые минимизируют функцию стоимости.
В одном примере осуществления корректировка отметки времени ЭФ-сигнала включает: (a) выбор исходной аннотации в ЭФ-сигнале, (b) определение скорректированной аннотации, соответствующей исходной аннотации, на основе оцененного DOA и расстояния и (c) корректировку отметки времени ЭФ-сигнала при проверке того, что скорректированная аннотация соответствует заданному условию.
В другом примере осуществления проверка того, что скорректированная аннотация соответствует заданному условию, включает проверку того, что скорректированная аннотация попадает в углубление между соседними пиками в ЭФ-сигнале. В еще одном примере осуществления проверка того, что скорректированная аннотация соответствует заданному условию, включает в себя проверку того, что скорректированная аннотация и исходная аннотация лежат на одном и том же монотонно убывающем сегменте ЭФ-сигнала.
В некоторых примерах осуществления проверка того, что скорректированная аннотация соответствует заданному условию, включает в себя проверку того, что скорректированная аннотация и исходная аннотация лежат на одном и том же монотонном сегменте ЭФ-сигнала и что наклон сегмента ниже заданного порогового наклона.
В соответствии с примером осуществления настоящего изобретения дополнительно предложена система, включающая в себя интерфейс и процессор. Интерфейс выполнен с возможностью приема совокупности данных наблюдения, полученных множеством электродов в сердце, причем каждые данные наблюдения включают в себя множество электрофизиологических (ЭФ) сигналов. Процессор, выполненный с возможностью: (a) оценивания для по меньшей мере некоторых из данных наблюдения соответствующего направления прихода (DOA) и соответствующего расстояния относительно электродов, от которых исходило множество ЭФ-сигналов, (b) оценивания погрешности отметки времени по меньшей мере в одном ЭФ-сигнале среди ЭФ-сигналов на основании оцененного DOA и расстояния, (c) корректировки отметки времени ЭФ-сигнала так, чтобы она соответствовала оцененному DOA и расстоянию и исправляла погрешность, и (d) формирования ЭФ-карты по меньшей мере части сердца с использованием множества ЭФ-сигналов, включающего исправленный ЭФ-сигнал.
Краткое описание чертежей
Настоящее изобретение станет более понятным из следующего подробного описания примеров осуществления, представленных вместе с чертежами, на которых:
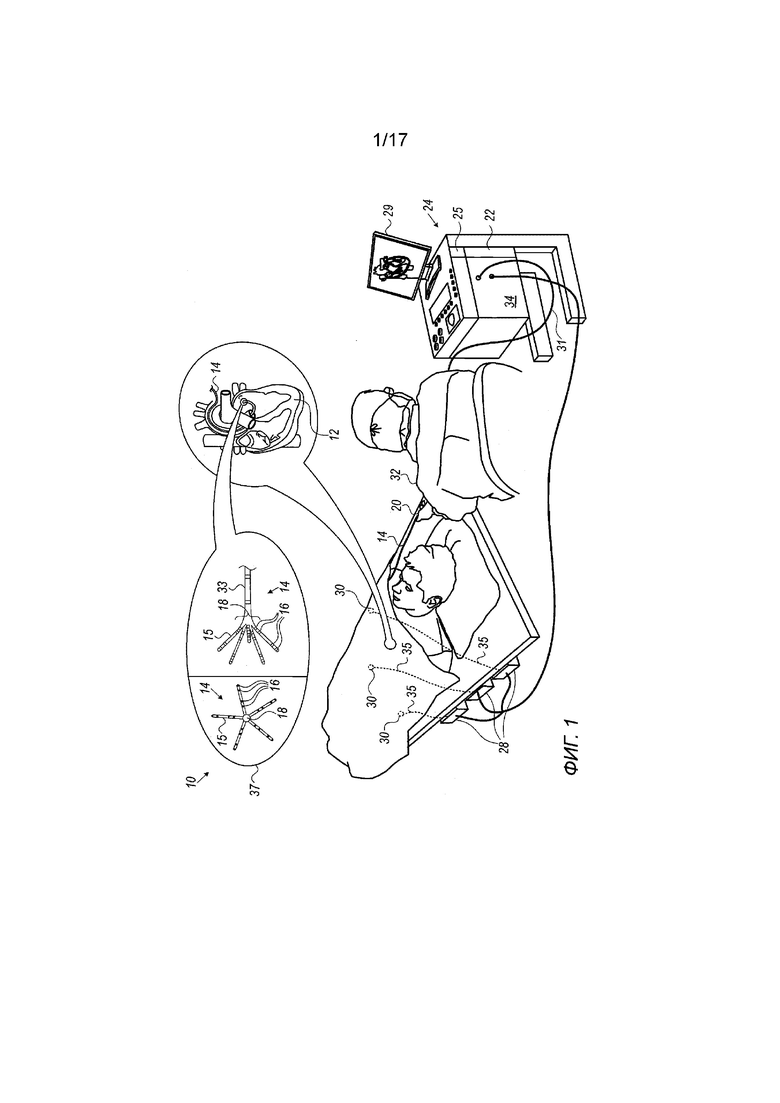
Фиг. 1 - схематичная графическая иллюстрация системы электрофизиологического (ЭФ) картирования в соответствии с примером осуществления настоящего изобретения;
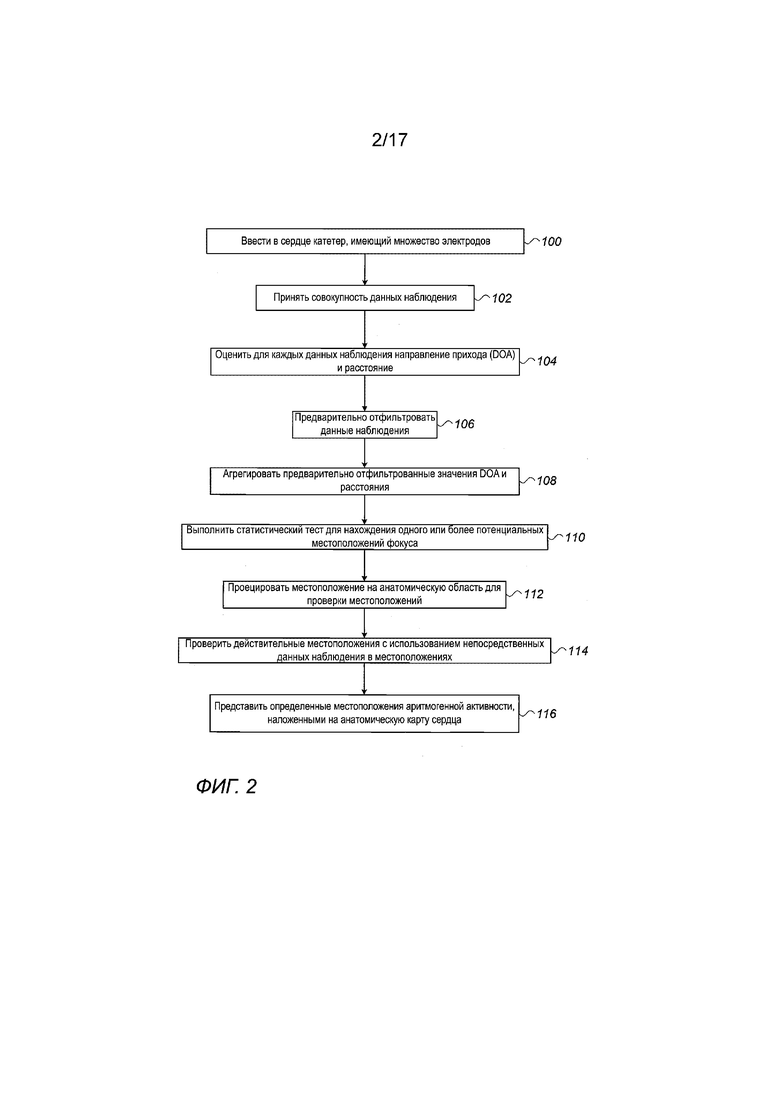
Фиг. 2 - блок-схема, которая схематически иллюстрирует способ автоматического определения местоположения фокального источника аритмии в соответствии с примером осуществления настоящего изобретения;
Фиг. 3A и 3B - две диаграммы, на которых показаны графики ЭФ-сигналов, которые были получены системой, показанной на Фиг. 1, в соответствии с примером осуществления настоящего изобретения;
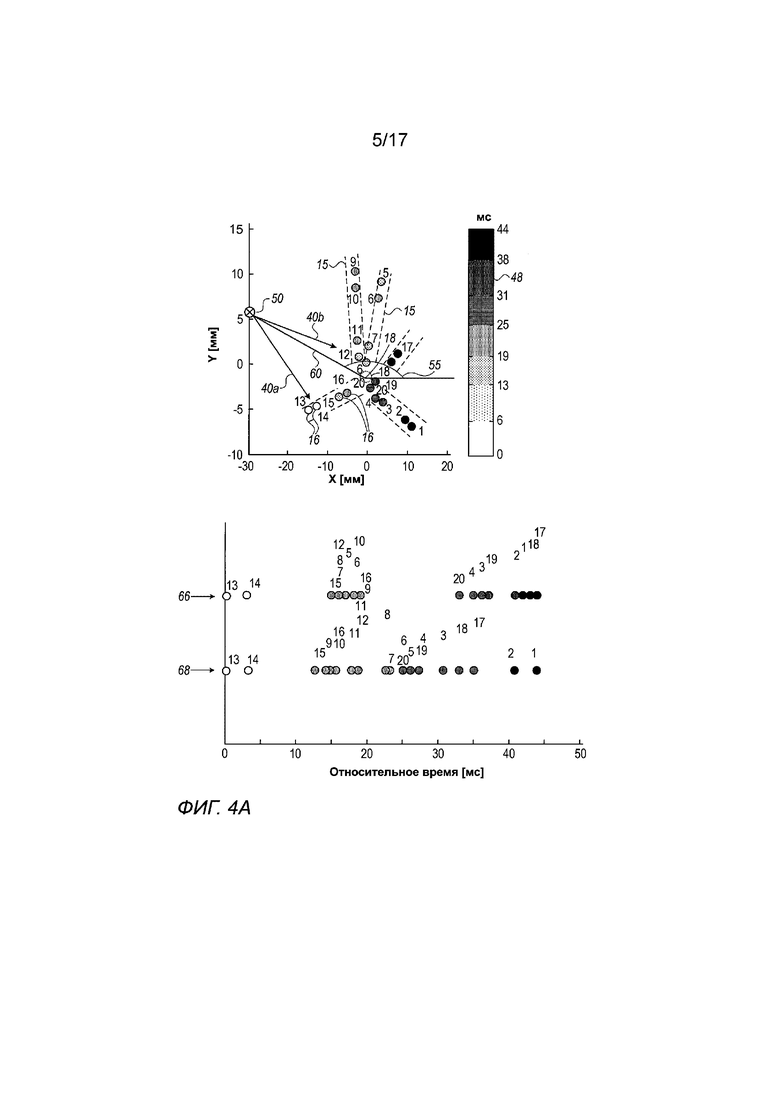
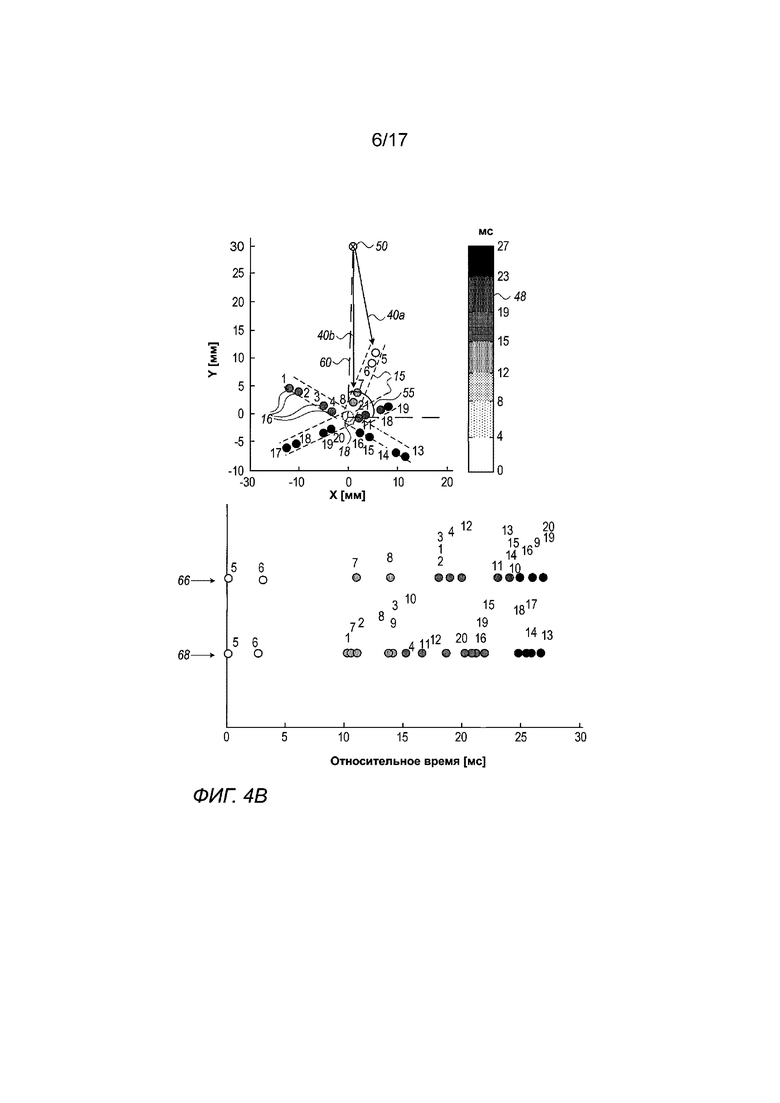
Фиг. 4A и 4B - графики, показывающие относительное время прихода, извлеченное и смоделированное с использованием ЭФ-сигналов графиков, показанных на Фиг. 3A и 3B соответственно, в соответствии с примером осуществления настоящего изобретения;
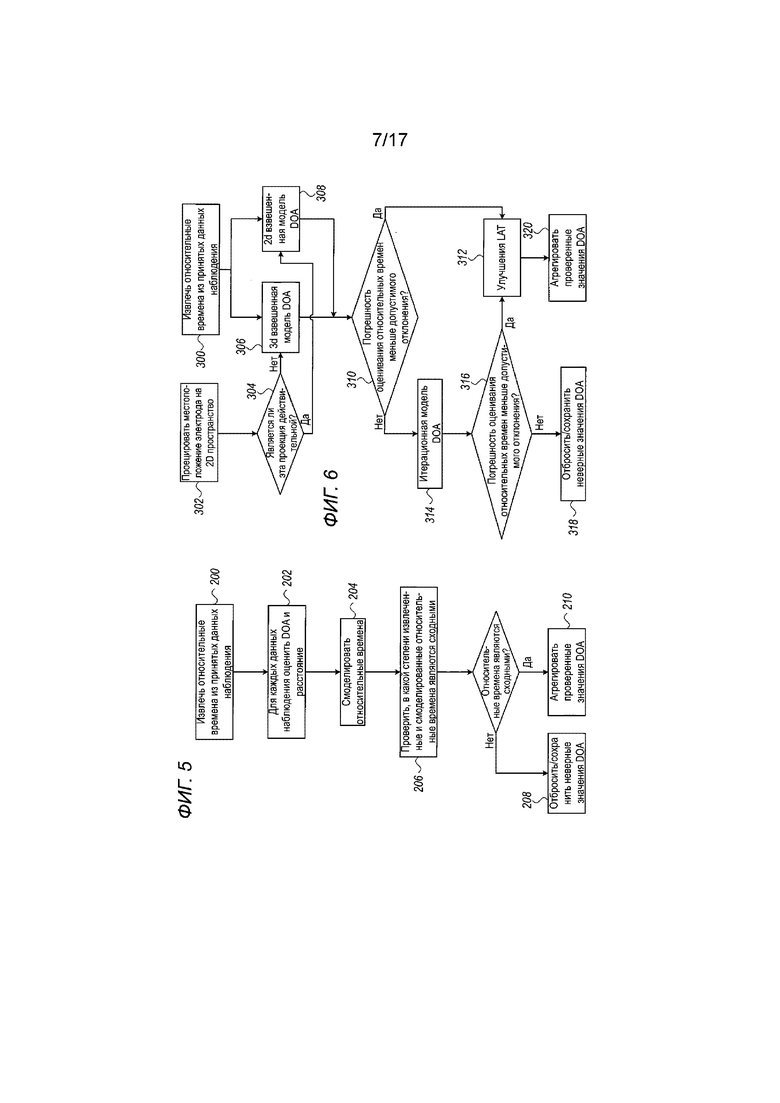
Фиг. 5 - блок-схема, которая схематически иллюстрирует способ получения направления прихода (DOA) и расстояния согласно стадий, проиллюстрированных на Фиг. 4A и 4B, в соответствии с примером осуществления настоящего изобретения;
Фиг. 6 - блок-схема, которая схематически иллюстрирует способ получения направления прихода (DOA) от фокального источника в соответствии с примером осуществления настоящего изобретения;
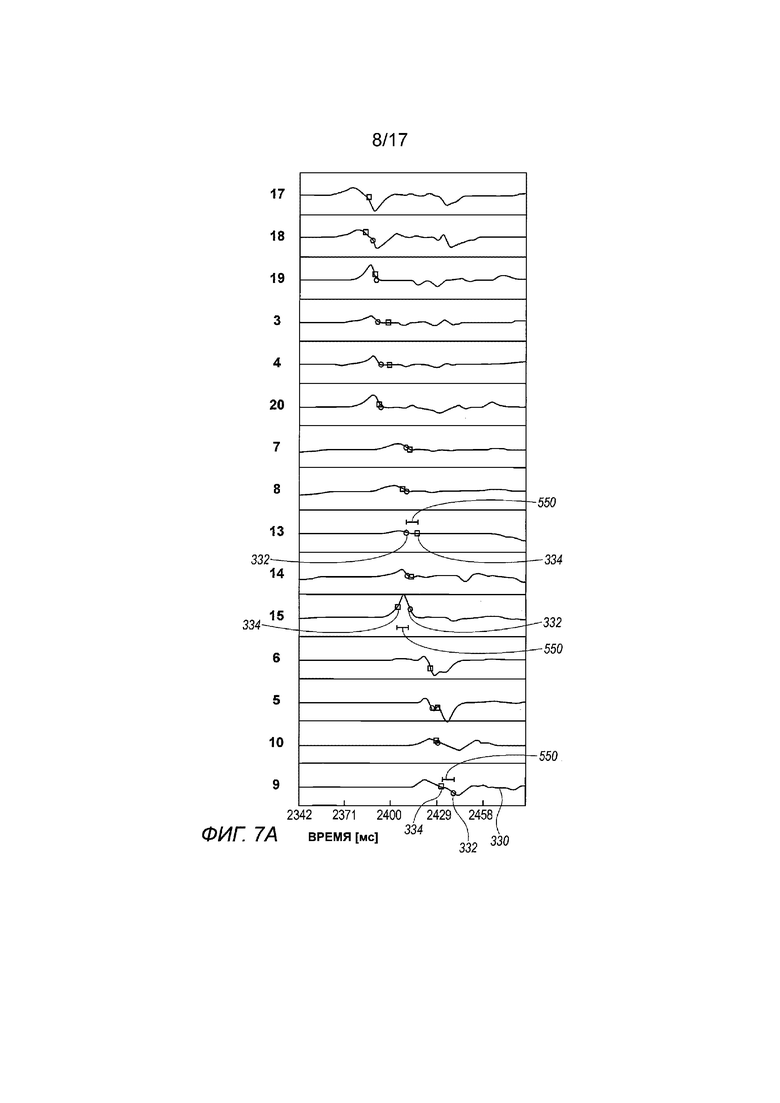
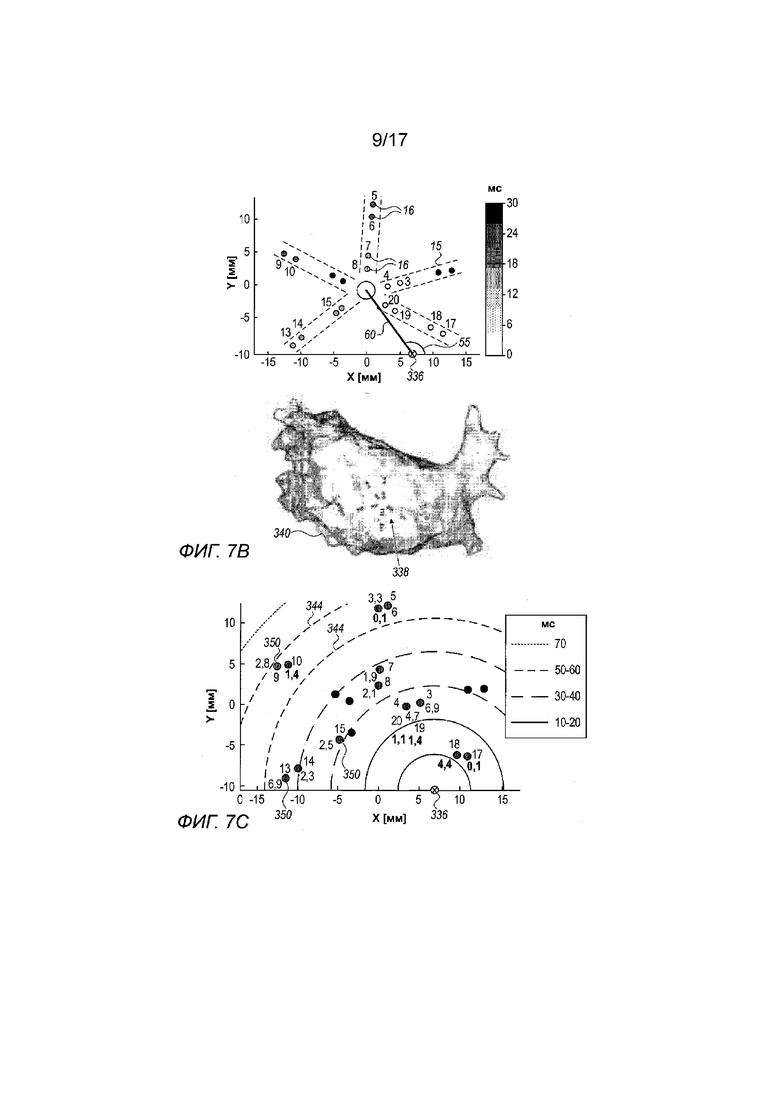
Фиг. 7A-7C - соответственно: (a) диаграмма, на которой показаны графики однополярных ЭФ-сигналов, полученных системой, показанной на Фиг. 1, (b) местоположение катетера, и (c) изохронная карта, отображающая соответствующие погрешности оценивания в извлеченных ЭФ-значениях, в соответствии с примером осуществления настоящего изобретения;
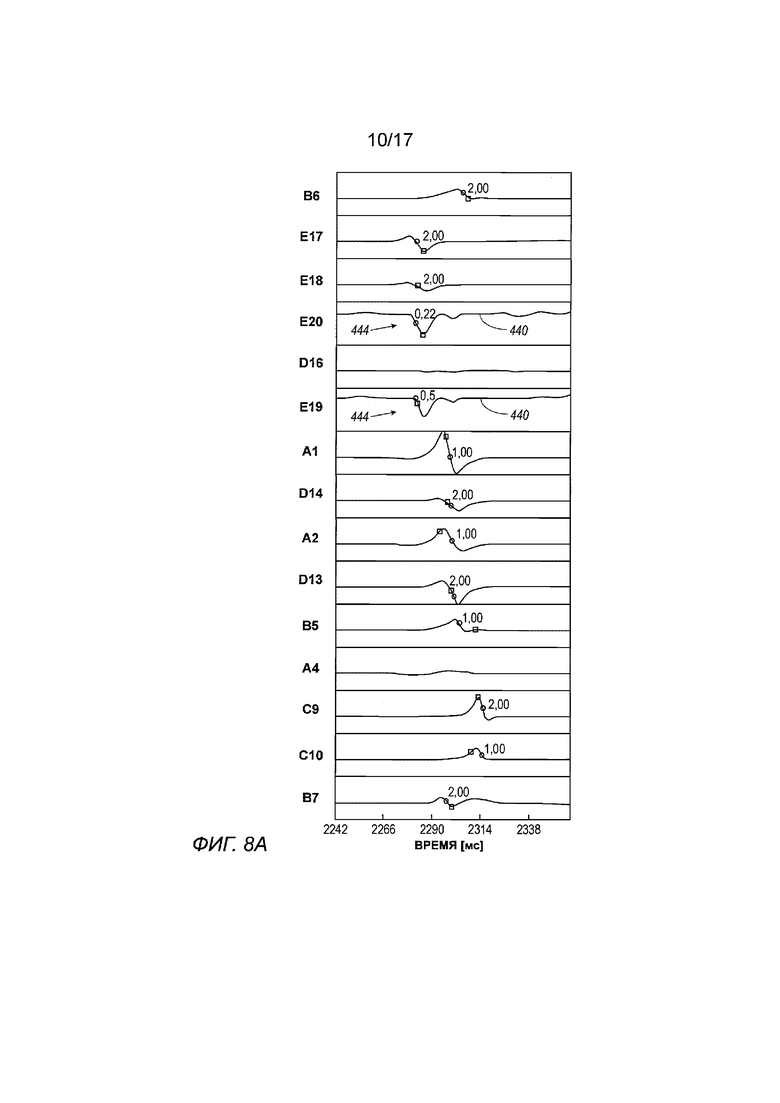
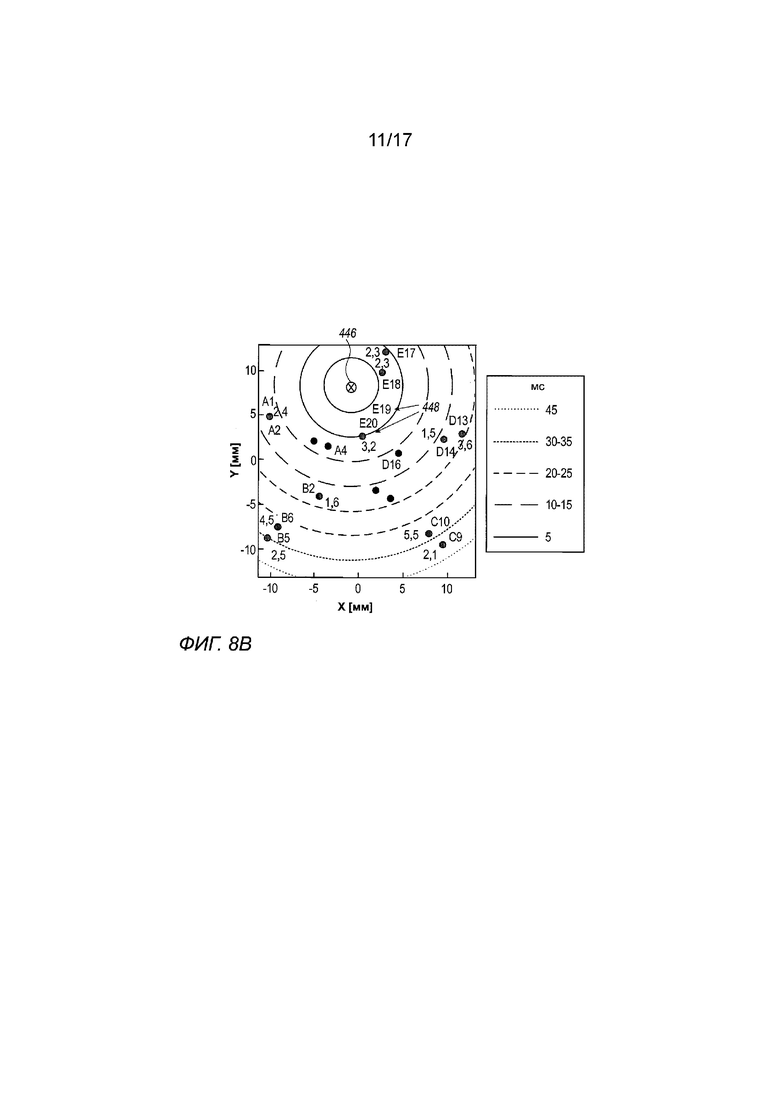
Фиг. 8A и 8B – соответственно: диаграмма, на которой показаны графики однополярных ЭФ-сигналов, полученных системой, показанной на Фиг. 1, и изохронная карта, на которой показаны соответствующие погрешности оценивания в извлеченных ЭФ-значениях, в соответствии с примером осуществления настоящего изобретения;
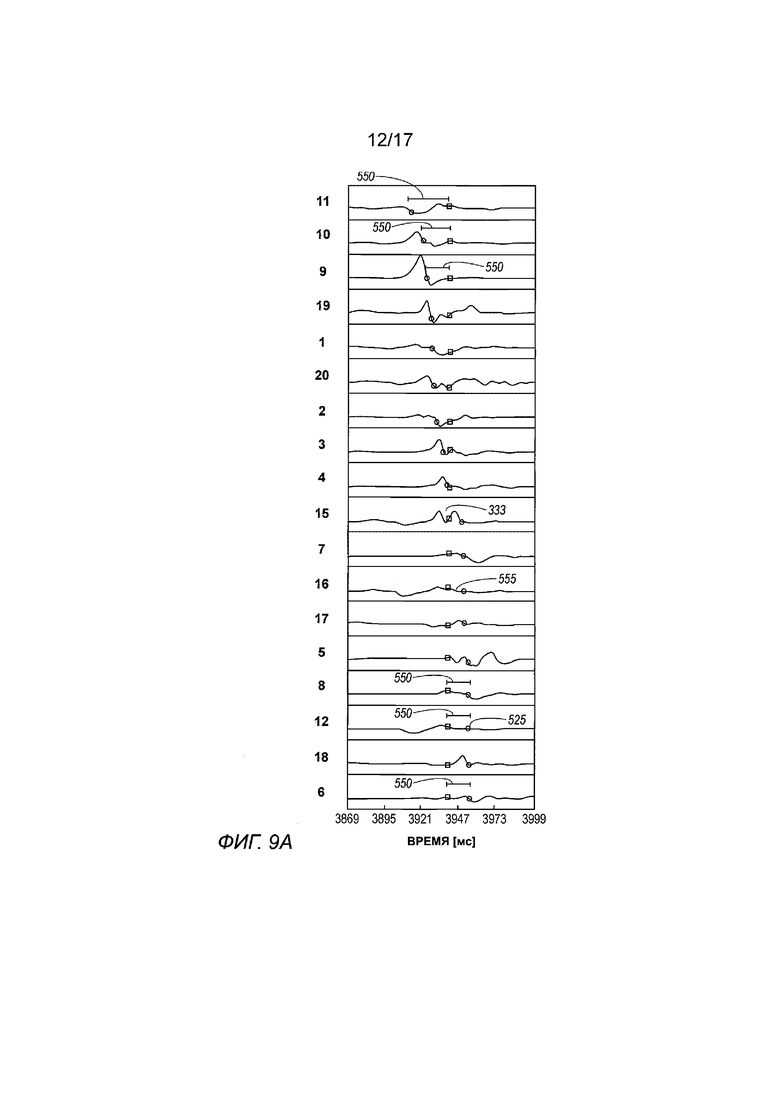
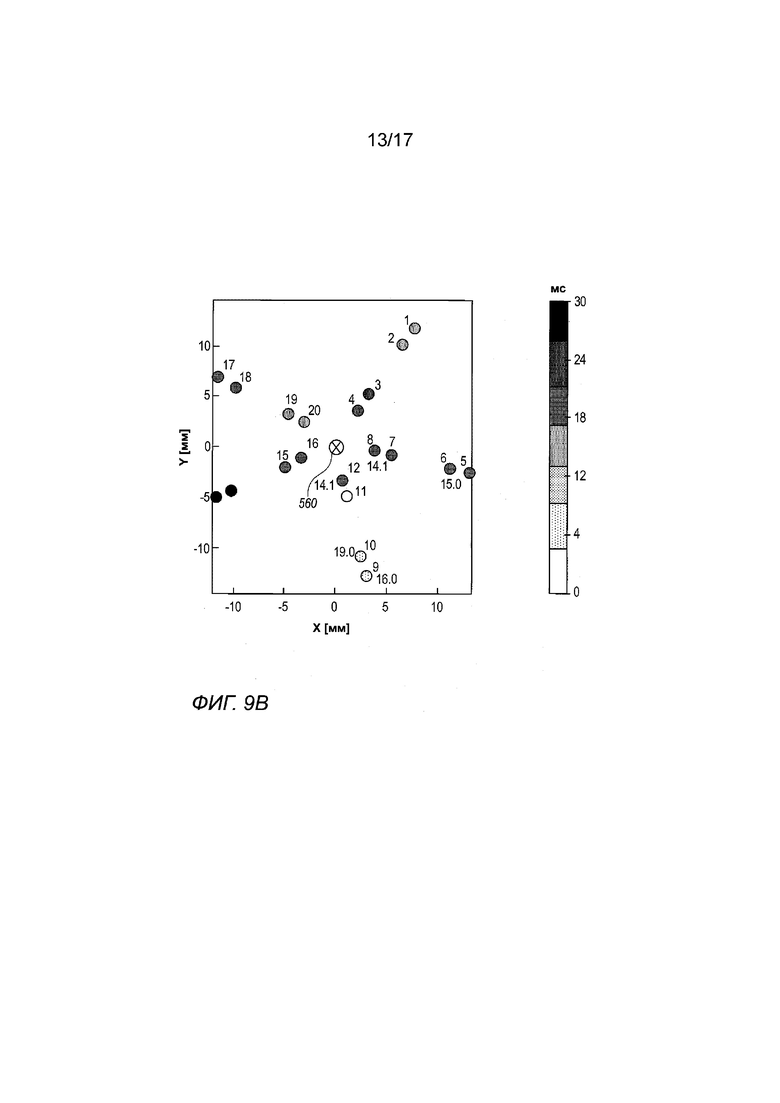
Фиг. 9A и 9B – соответственно: диаграмма, на которой показаны графики однополярных ЭФ-сигналов, содержащие погрешности оценивания выше заданного порогового значения, и первоначально рассчитанное местоположение фокального источника в пространстве X-Y в соответствии с примером осуществления настоящего изобретения;
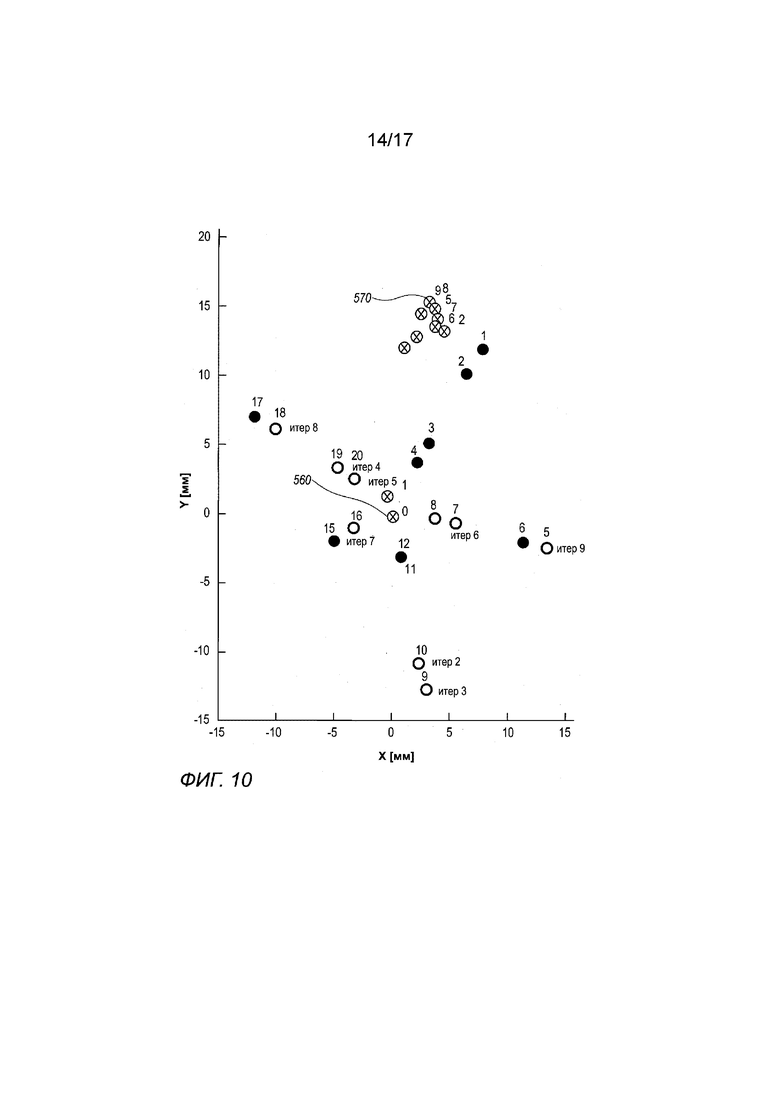
Фиг. 10 - график, на котором показано расчетное местоположение фокального источника, показанного на Фиг. 9B, в девяти итерациях итерационной модели DOA в соответствии с примером осуществления настоящего изобретения;
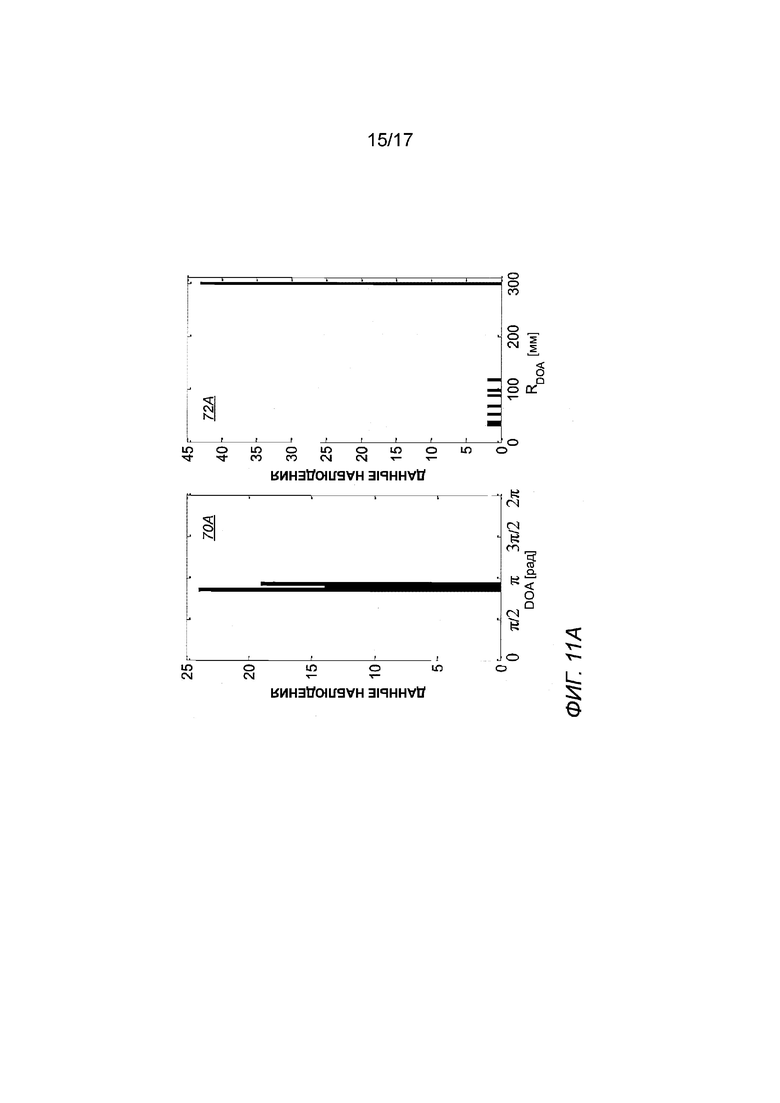
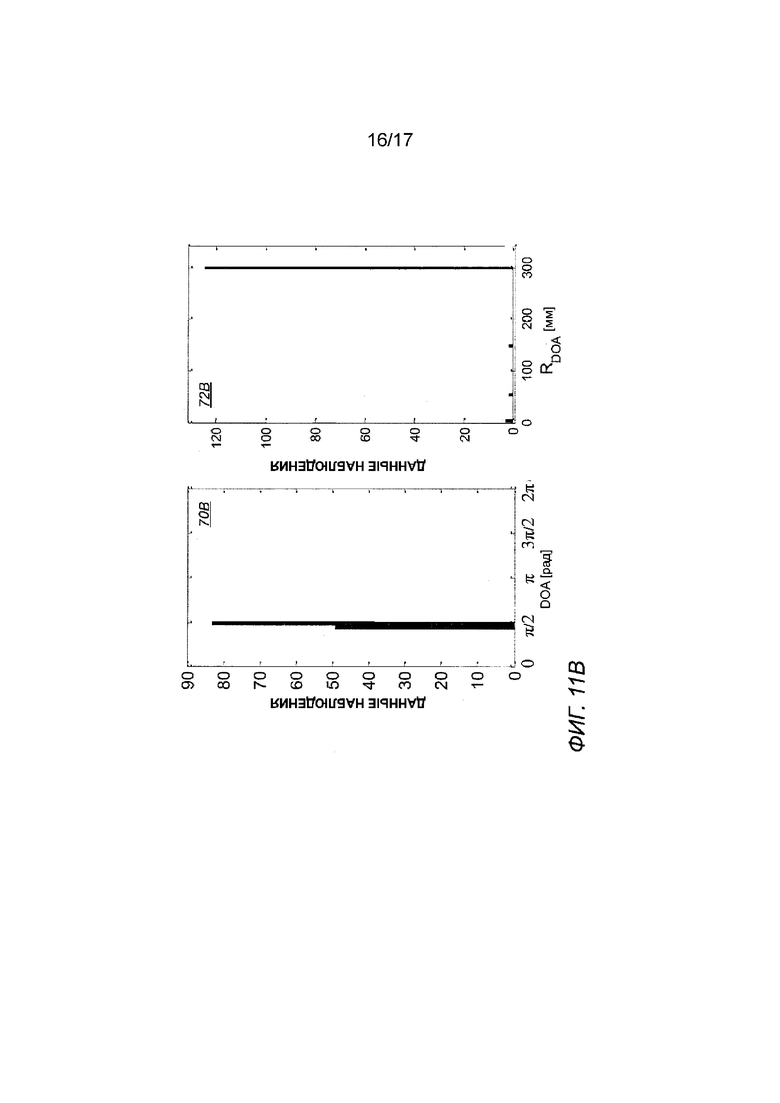
Фиг. 11A и 11B - гистограммы направления прихода (DOA) и расстояния от фокального источника в соответствии с примером осуществления настоящего изобретения; и
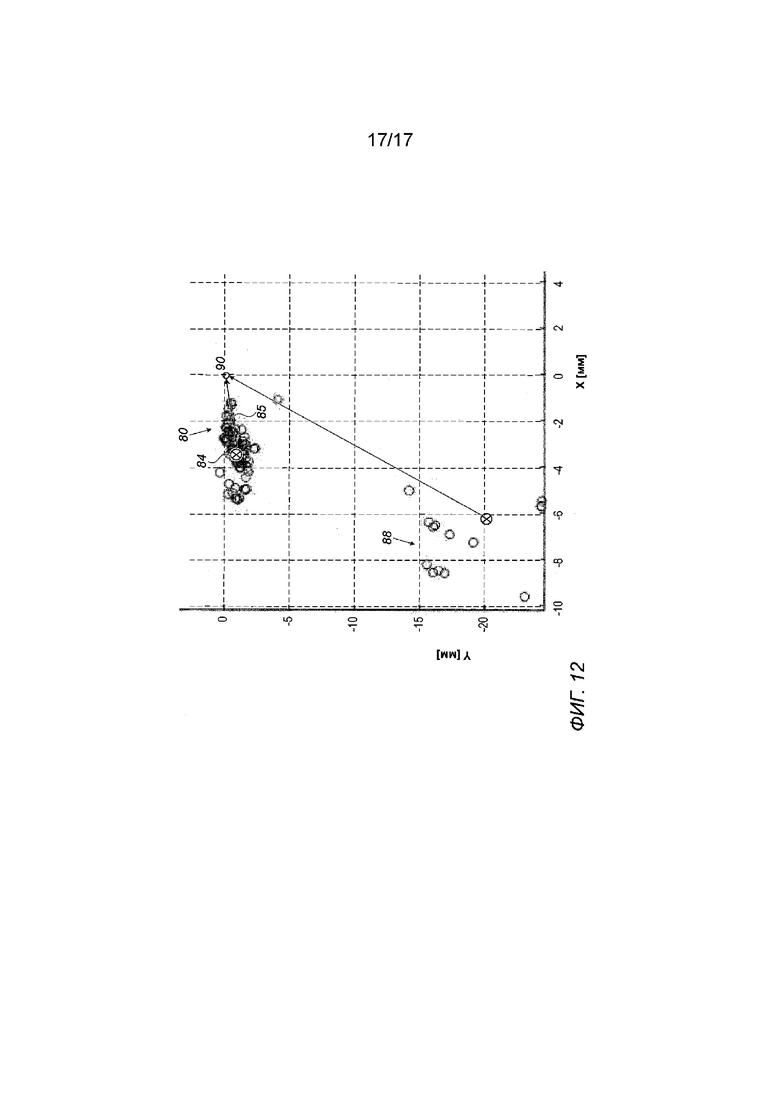
Фиг. 12 - график, на котором показаны кластеры DOA, проанализированные с помощью модели кластеризации k-средних в соответствии с примером осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Общее описание
В случае фокального типа аритмии аберрантный электрофизиологический (ЭФ) волновой импульс аномально распространяется от эктопического фокуса в сердце. Фокальный тип аритмии может возникать из-за локализованной аномальной сердечной ткани, которая вызывает аберрантную аномальную ЭФ-волну, или локализованной аномальной сердечной ткани, образующей малый путь re-entry, который вызывает ложное распространение существующей ЭФ-волны. У некоторых пациентов для устранения фокального типа аритмии можно провести абляцию локализованной аритмогенной ткани. Таким образом, определение местоположения фокального типа аритмогенной ткани может быть клинически значимым.
Примеры осуществления настоящего изобретения, которые описаны ниже в настоящем документе, представляют системы ЭФ-картирования и способы автоматического определения в сердце местоположения фокальной аритмогенной активности. Дополнительно или альтернативно в некоторых примерах осуществления предложены способы оценивания ошибок аннотации в измеренных ЭФ-значениях и коррекции ошибок аннотации в зависимости от их причины. В некоторых примерах осуществления на основании множества аннотаций, которое содержит исправленную аннотацию, процессор генерирует ЭФ-карту по меньшей мере части сердца (например, карту LAT).
В системе ЭФ-картирования используют многоэлектродный катетер, такой как катетер Pentaray® (выпускаемый компанией Biosense-Webster, г. Ирвайн, штат Калифорния, США) для получения множества данных наблюдения из области сердца, охваченной электродами. Каждые данные наблюдения содержат множество ЭФ-сигналов, измеренных электродами, причем размер множества выбирают в соответствии с числом электродов. Однако, сделав соответствующие изменения, с описанными методами можно использовать и другие многоэлектродные катетеры.
В некоторых примерах осуществления процессор затем оценивает для каждых данных наблюдения направление прихода (DOA) и расстояние RDOA относительно электродов, от которых исходило полученное множество ЭФ-сигналов. Процессор агрегирует данные наблюдения с образованием статистического распределения (например, гистограммы или кластерной карты в X-Y пространстве) данных наблюдения в зависимости от оцененного DOA и расстояния и проверяет с использованием статистического теста, является ли статистическое распределение данных наблюдения непротиворечивым.
Непротиворечивость проверяют в соответствии с заданным критерием непротиворечивости. Примеры соответствующих тестов на непротиворечивость включают в себя, без ограничений, алгоритм оценивания непротиворечивости или использование доверительного интервала. В другом примере кластерная карта в пространстве X-Y может быть непротиворечивой, если один или более кластеров на карте содержат каждый по меньшей мере заданный процент точек данных (например, 10%), как описано ниже.
Если статистическое распределение данных наблюдения признано непротиворечивым, процессор получает на основании статистического распределения расчетное местоположение в сердце фокального источника аритмогенной активности, который генерировал принятые ЭФ-сигналы. В завершение процессор накладывает расчетное местоположение фокального источника на анатомическую карту по меньшей мере части сердца.
В некоторых примерах осуществления чтобы оценить DOA и расстояние процессор аннотирует каждый ЭФ-сигнал с момента прихода ЭФ-волнового фронта, называемого ниже в настоящем документе как исходные аннотации. Процессор извлекает из изначально аннотированного множества сигналов (т.е. из заданных данных наблюдения) соответствующий набор относительных времен прихода. С использованием геометрической модели процессор анализирует извлеченное множество относительных времен, чтобы указать тип рассматриваемой ЭФ-волны, как описано ниже. Модель предполагает, что каждые данные наблюдения однозначно связаны с одним перемещающимся широким ЭФ волновым фронтом, имеющим постоянную скорость над областью, в которой получены ЭФ-сигналы.
В некоторых примерах осуществления при агрегировании данных наблюдения процессор осуществляет предварительную фильтрацию данных наблюдения и включает в статистическое распределение данных наблюдения только предварительно отфильтрованные данные наблюдения. Процессор осуществляет предварительную фильтрацию данных наблюдения, применяя стадии, на которых: (a) используя расчетное DOA и расстояние, рассчитывают для каждых данных наблюдения смоделированное множество относительных времен прихода, которые бы являлись результатом ЭФ-волны, исходящей от фокального источника при расчетных DOA и расстоянии относительно катетера, и (b) для каждых данных наблюдения применяют тест для определения, в какой степени являются сходными извлеченное множество и смоделированное множество относительных времен прихода, и отбрасывают любые данные наблюдения, которое приводит к появлению несхожих множеств отметок времени. Примеры соответствующих тестов включают в себя тест на геометрическое сходство и сравнение погрешностей оценивания (также называемых далее погрешностями отметок времени) с заданным пороговым значением.
В некоторых примерах осуществления тест на геометрическое сходство включает применение геометрического теста на косинусное сходство между извлеченными и смоделированными множествами относительных времен прихода. Степень сходства может находиться в диапазоне от ноля для полного несходства до одного для полного сходства. В альтернативном примере осуществления в качестве геометрического теста используют метод наименьших квадратов.
Абберантная ЭФ-волна может необязательно иметь фокальную природу происхождения, на что может указывать проверка сходства. В одном примере осуществления, независимо от природы ЭФ-волны, т.е. фокусного или аберрантного, полученное смоделированное относительное время можно использовать для корректировки значений времени исходных аннотаций, которые определены неправильно, т.е., когда наклон напряжение-время волнового фронта является более пологим, чем предварительно заданный наклон. Исправленные аннотации также называются в настоящем документе скорректированными аннотациями.
Как правило, процессор запрограммирован в программном обеспечении, содержащем конкретный алгоритм, благодаря которому процессор может выполнять каждую из описанных выше стадий и функций, связанных с процессором.
Описанная методика автоматического определения фокального источника аритмогенной активности в сердце может улучшить клинический исход лечения аритмии на основе катетера.
Описание системы
На Фиг. 1 представлена схематичная графическая иллюстрация системы 10 электрофизиологического (ЭФ) картирования в соответствии с примером осуществления настоящего изобретения. Система 10 содержит катетер 14, который врач 32 вводит через сердечно-сосудистую систему пациента в камеру или сосудистую структуру сердца 12. Врач 32 приводит дистальный конец 18 катетера в контакт со стенкой сердца, например, на целевом участке ЭФ-картирования. Катетер 14, как правило, содержит ручку 20, которая имеет приемлемые устройства управления, которые позволяют врачу 32 управлять дистальным концом катетера 14, позиционировать и ориентировать его желательным для ЭФ-картирования образом.
Катетер 14 представляет собой многоэлектродный катетер, такой как вышеуказанный катетер Pentaray®, показанный на вставке 37. Катетер 14 Pentaray содержит пять гибких отведений 15, причем каждое отведение содержит четыре электрода 16. Таким образом, в каждом случае получения ЭФ-сигнала система 10 получает в общей сложности двадцать ЭФ-сигналов, как дополнительно описано на Фиг. 2.
Катетер 14 соединен с пультом 24 управления, который позволяет врачу 32 наблюдать за функциями катетера 14 и регулировать их. Для помощи врачу 32 дистальная часть катетера 14 может содержать различные датчики, такие как датчики контактного усилия (не показаны) и магнитный датчик 33, которые обеспечивают сигналы о положении, направлении и ориентации для процессора 22, размещенного в пульте 24 управления. Процессор 22 может выполнять несколько функций по обработке данных, как описано ниже. В частности, электрические сигналы могут передаваться к сердцу 12 и от него от электродов 16, размещенных на дистальном конце 18 катетера 14 или вблизи него, по кабелю 31 к пульту 24 управления. Сигналы электростимуляции и другие сигналы управления могут передаваться от пульта 24 управления по кабелю 31 и электродам 16 к сердцу 12.
Пульт 24 управления содержит монитор 29, управляемый процессором 22. Цепи обработки сигналов в электрическом интерфейсе 34, как правило, принимают, усиливают, фильтруют и оцифровывают сигналы от катетера 14, включая сигналы, генерируемые вышеуказанными датчиками и множеством измерительных электродов 16. Пульт 24 управления и система позиционирования принимают и используют оцифрованные сигналы для расчета положения и ориентации катетера 14 и анализа ЭФ-сигналов от электродов 16, как более подробно описано ниже.
Во время описанной процедуры отслеживают соответствующие местоположения электродов 16. Отслеживание может быть выполнено, например, с использованием системы CARTO® 3, выпускаемой компанией Biosense-Webster. Такая система измеряет импедансы между электродами 16 и множеством внешних электродов 30, которые закреплены на теле пациента. Например, три внешних электрода 30 могут быть закреплены на грудной клетке пациента, а три других внешних электрода могут быть закреплены на спине пациента. (Для наглядности на Фиг. 1 показаны только грудные электроды). Проводные соединения 35 связывают пульт 24 управления с электродами 30 на поверхности тела и другими компонентами подсистемы позиционирования для измерения координат местонахождения и положения катетера 14. Способ отслеживания положений электрода 16 на основе электрических сигналов, называемый активная токовая локализация (ACL), реализован в различных медицинских приложениях, как, например, в вышеуказанной системе CARTO® 3. Подробная информация о подсистеме и процессе ACL представлена в патенте США № 8456182, содержание которого включено в настоящий документ путем ссылки.
В некоторых примерах осуществления система 10 дополнительно или вместо подсистемы ACL отслеживания содержит подсистему магнитного отслеживания положения, которая определяет положение и ориентацию магнитного датчика 33 на дистальном конце катетера 14 путем создания магнитных полей в заданном рабочем объеме и определения этих полей на катетере с использованием катушек 28 для создания поля. Поскольку электроды 16 имеют известные местоположения на отведениях 15 и известные взаимные расположения относительно друг друга, после магнитного отслеживания катетера 14 в сердце становится известно местонахождение каждого из электродов 16 в сердце. Подходящая подсистема магнитного отслеживания положения описана в патентах США № 7756576 и 7536218, содержание которых включено в настоящий документ путем ссылки.
На основании ЭФ-сигналов от электродов 16, содержащих отслеживаемые местоположения, можно получить карты электрической активации в соответствии со способами, описанными в патентах США № 6226542 и № 6301496, и № 6892091, содержание которых включено в настоящий документ путем ссылки.
Процессор 22 использует программное обеспечение, хранящееся в памяти 25, для управления системой 10. Программное обеспечение может быть загружено в процессор 22 в электронном виде, например, передано по сети, или в альтернативном или дополнительном варианте оно может быть предоставлено и/или может храниться на энергонезависимом материальном носителе, таком как магнитная, оптическая или электронная память. В частности, процессор 22 использует специализированный алгоритм, описанный в настоящем документе, в том числе на Фиг. 2, благодаря которому процессор 22 может осуществлять описанные стадии, дополнительно описанные ниже.
Пример, показанный на Фиг. 1, выбран исключительно для обеспечения концептуальной ясности. Можно также использовать другие типы геометрических форм измерительных катетеров, например, корзинчатый катетер или Lasso® Catheter (выпускаемый компанией Biosense Webster).
Автоматическое определение местоположения фокального источника при мерцательной аритмии (МА)
На Фиг. 2 представлена блок-схема, которая схематически иллюстрирует способ автоматического определения местоположения фокального источника аритмии в соответствии с примером осуществления настоящего изобретения. Алгоритм в соответствии с представленным примером осуществления осуществляет процесс, который начинается на стадии 100 введения катетера с введения врачом 32 катетера 14, имеющего множество чувствительных электродов 16, в сердце 12 пациента.
Затем на стадии 102 получения ЭФ-сигналов система 10 принимает совокупность данных наблюдения множеств ЭФ-сигналов от электродов 16, которые были приведены в контакт с сердечной тканью врачом 32. В стандартном диагностическом интервале продолжительностью тридцать секунд, используемом в некоторых описанных примерах осуществления, система собирает от 100 до 200 данных наблюдений, содержащих сегменты ЭКГ, каждый из которых имеет стандартную длительность 100-200 мс. В некоторых примерах осуществления процессор 22 выполняет автоматическую сегментацию 30-секундного окна, чтобы получить сегменты продолжительностью 100-200 мс, причем каждый сегмент соответствует одной активации, распространяющейся через предсердие.
Затем на стадии 104 получения DOA процессор 22 получает из каждых данных наблюдения оценочное значение DOA и расстояния предполагаемого фокального источника. Затем на стадии 106 предварительной фильтрации процессор 22 осуществляет предварительную фильтрацию каждых данных наблюдения для отбрасывания данных наблюдения, которые не подходят для включения в последующий статистический анализ. В некоторых примерах осуществления процессор 22 осуществляет предварительную фильтрацию данных наблюдения путем сравнения погрешностей в расчетных относительных временах между извлеченными ЭФ-значениями и смоделированными ЭФ-значениями. Данный этап может включать попытку дополнительной обработки, такую как включение итеративного расчета для улучшения оценки DOA и, таким образом, уменьшения погрешностей оценивания, как описано ниже.
В других примерах осуществления процессор осуществляет предварительную фильтрацию данных наблюдения путем выполнения геометрического теста непротиворечивости смоделированных ЭФ-значений и извлеченных ЭФ-значений (например, выполнение теста на косинусное сходство).
В любом случае на стадии 108 агрегирования процессор 22 агрегирует проверенные значения DOA и расстояния. Далее, на стадии 110 статистического анализа процессор 22 выполняет статистический тест для нахождения одного или более кандидатов DOA и расстояния (т.е. потенциальных местоположений фокуса), если таковые существуют.
На стадии 112 подтверждения проецирования процессор проверяет, является ли потенциальное местоположение действительным местоположением путем проецирования местоположения на анатомическую область.
Кроме того, на стадии непосредственного подтверждения 114 процессор проверяет для подтвержденного потенциального местоположения, что в подтвержденном местоположении было получено по меньшей мере минимальное число указывающих фокус сигналов ЭКГ, описанных ниже.
В завершение на стадии 116 представления фокального источника процессор 22 осуществляет наложение одного или более определенных местоположений фокального источника аритмогенной активации на анатомическую карту по меньшей мере части сердца 12.
Пример блок-схемы, показанный на Фиг. 2, выбран исключительно для обеспечения концептуальной ясности. Ниже приводится более подробная информация и конкретные примеры осуществления стадий, описанных кратко выше, в том числе на блок-схемах, представленных на Фиг. 5 и 6.
ПОЛУЧЕНИЕ И ПРОВЕРКА НАПРАВЛЕНИЯ ПРИХОДА (DOA) И РАССТОЯНИЯ С ПОМОЩЬЮ ПЕРВОГО СПОСОБА
На Фиг. 3A и 3B представлены две диаграммы, на которых показаны графики 42 ЭФ-сигналов, которые были получены системой, показанной на Фиг. 1, в соответствии с примером осуществления настоящего изобретения. Показанные ЭФ-сигналы были получены, например, с помощью системы ЭФ-картирования, показанной на Фиг. 1, с использованием катетера 14. Эти две выборки данных наблюдения являются частью множества данных наблюдения, пронумерованных от нескольких десятков до нескольких сотен. Такая совокупность может включать в себя данные наблюдения, полученные в различных местах размещения катетера внутри сердца, и/или повторные данные наблюдения, полученные во время одного и того же размещения. С использованием системы отслеживания каждый из множества электродов имеет местоположение в сердце.
На графиках показаны изначально аннотированные времена 44, при которых ЭФ-волна «ударяет» по каждому из двадцати электродов катетера 14. Аннотирования выполняют с помощью способа, известного в данной области, например, описанного в патенте США № 8700136, содержание которого включено в настоящий документ путем ссылки.
На Фиг. 3A ЭФ-волна сначала ударяет по электродам «13» и «14», затем по электродам «15» и «7» и так далее. На Фиг. 3B ЭФ-волна сначала ударяет по электродам «5» и «6», затем по электродам «7» и «8» и так далее.
Как показано на Фиг. 3A и 3B, некоторые из наклонов напряжение-время ЭФ-сигнала, которые изначально были аннотированы, не определяются однозначно, т.е. являются пологими (например, на графиках 10 и 11 на Фиг. 3B). В одном примере осуществления описанная методика повышает точность таких аннотаций путем получения скорректированных аннотаций, как показано ниже на Фиг. 7A, 8A и 9A, даже если методика не идентифицирует фокальный источник аритмогенной активности. В примерном варианте осуществления смоделированные времена, которые получают ниже и которые зависят от известной геометрической формы катетера 14, используются для корректировки значений времени исходных аннотаций, которые не были четко определены, т.е. когда наклон напряжение-время, показанный на Фиг. 3A и 3B является более пологим, чем предварительно заданный наклон.
Фиг. 3A и 3B приведены в качестве примера. Если используется другой катетер, имеющий множество электродов, такой как корзинчатый катетер или катетер «Lasso», то объем данных наблюдения (например, число диаграмм в множестве) и аннотированные времена будут отражать геометрическую форму данного катетера при аналогичном применении описываемой методики.
На Фиг. 4A и 4B представлены графики, показывающие относительное время прихода, извлеченное и смоделированное с использованием ЭФ-сигналов графиков Фиг. 3A и 3B соответственно, в соответствии с примером осуществления настоящего изобретения. Процессор 22 будет предварительно фильтровать данные наблюдения в соответствии с соответствующим извлеченным множеством относительных времен прихода путем осуществления описанных ниже стадий.
Извлеченные времена 66 на Фиг. 4A и 4B получают с помощью процессора 22 для расчета разности по времени между изначально аннотированными временами 44 на Фиг. 3A и 3B, соответственно. Затем с помощью процессора 22 получают соответствующие смоделированные относительные времена 68 на Фиг. 4A и 4B, используя скорректированные аннотированные времена (не показаны), как описано ниже.
С помощью цветовой шкалы 48 в верхней части Фиг. 4A и 4B кодируют относительное время прихода цветом, кодирующим каждый из показанных двадцати электродов 16 катетера 14. Верхняя часть Фиг. 4A и 4B дополнительно отображает отслеживаемые местоположения электродов 16 (поверх схематически помеченных отведений 15 катетера 14 Pentaray) в двух случаях, когда электроды получили ЭФ-сигналы. Местоположение каждого электрода 16 в 3D пространстве отслеживают с помощью, например, вышеуказанной методики отслеживания ACL. Система координат X-Y-Z (Z не показана) относится к неподвижной системе координат, такой как система 20 отслеживания местоположения, в которой применяется метод ACL.
На основании извлеченных относительных времен 66 прихода, процессор 22 оценивает геометрически (например, как указано стрелками 40a и 40b) предполагаемый фокальный источник 50, от которого, по-видимому, приходит ЭФ-волна, дополнительно обозначенная линией 60, которая соединяет общее местоположение, в котором стрелки 40a и 40b исходят от дистального конца 18 катетера 14.
Нижняя часть Фиг. 4A и 4B отображает на одном и том же графике извлеченные относительные времена прихода 66 и соответствующее смоделированное множество относительных времен 68 прихода. Относительные времена прихода 66 получают с помощью процессора 22 на основании изначально аннотированных времен, в которые фактическая ЭФ-волна «ударяет» по электродам. Смоделированные времена 68 рассчитываются процессором 22 с использованием расчетных DOA 55 и расстояния 60, предполагая, что смоделированная ЭФ-волна возникла в фокальном источнике 50, имеющем расчетное DOA и расстояние относительно электродов 16.
В одном примере осуществления данные наблюдения определяются процессором, указывающим фокальный источник, только в том случае, если совпадение отметок времени косинусного сходства, полученное из данных наблюдения, превышает значение 0,9. Можно использовать геометрический тест (например, метрики), отличный от косинусного сходства, который проверяет в какой степени являются сходными извлеченные и смоделированные множества, такой как расстояние Хемминга.
Процессор оценивает, до какой степени являются сходными каждая пара из таких множеств для каждых данных наблюдения, обозначенная в настоящем документе как векторы SEX и SMD, с использованием уравнения косинусного сходства:
Ур. 1 
Косинусное сходство, при котором рассчитывается нормализованное скалярное внутреннее произведение двух упорядоченных множеств, в результате может давать любое значение от -1 до 1. Практически косинусное сходство в частности используется в положительном пространстве, где результат ограничен в пределах [0,1]. Например, значение 1 соответствует полному сходству, тогда как значение ноль или любое отрицательное значение указывает на полное несходство. В одном примере осуществления, если рассчитанное косинусное сходство дает значение, превышающее предварительно заданное минимальное значение, такое как выше 0,9, процессор определяет, что множества будут сходными.
Процессор 22 выполняет проверку сходства по всем множествам, полученным из совокупности данных наблюдения, и отбрасывает данные наблюдения, имеющие косинусное сходство ниже предварительно заданного минимального значения (например, <0,9).
Далее, процессор 22 рассчитывает, только для данных наблюдения, которые успешно прошли тест на косинусное сходство, направление прихода (DOA) 55, определенное как фаза вектора  , и расстояние 60, с которого произошло множество сигналов, с помощью уравнений 2 и 3:
, и расстояние 60, с которого произошло множество сигналов, с помощью уравнений 2 и 3:
Ур. 2 
Ур. 3  ,
,
где  представляют собой векторные координаты предполагаемого фокального источника 50 и дистального конца 18 катетера 14, соответственно. В некоторых примерах осуществления настоящего изобретения при преобразовании системы координат из 3D в 2D
представляют собой векторные координаты предполагаемого фокального источника 50 и дистального конца 18 катетера 14, соответственно. В некоторых примерах осуществления настоящего изобретения при преобразовании системы координат из 3D в 2D  будет нулевым вектором, поскольку центр катетера размещается в начале координат пространства XY.
будет нулевым вектором, поскольку центр катетера размещается в начале координат пространства XY.
На Фиг. 5 представлена блок-схема, которая схематически иллюстрирует способ получения направления прихода (DOA) и расстояния согласно стадиям, проиллюстрированным на Фиг. 4A и 4B, в соответствии с примером осуществления настоящего изобретения. Этот процесс начинается с того, что на стадии 200 извлечения относительных времен процессор 22 извлекает относительные времена прихода 66 из изначально аннотированных ЭФ-сигналов.
Затем на стадии 202 оценивания DOA и расстояния на основании предположений о том, что ЭФ-сигналы были сгенерированы (a) одной ЭФ-волной, имеющей широкий волновой фронт, который (b) распространяется с постоянной скоростью, и на основании известной геометрической формы катетера 14, процессор 22 получает для каждых данных наблюдения расчетные значения DOA 55 и расстояния 60 ЭФ-волны.
Затем на стадии 204 моделирования относительных времен на основании расчетных значений DOA 55 и расстояния 60 процессор 22 рассчитывает относительное время, в течение которого будет сгенерирована фокальная волна, имеющая предположительное DOA и расстояние из стадии 106. Затем на стадии 206 проверки сходства процессор 22 проверяет, например, с помощью теста на косинусное сходство, до какой степени являются сходными извлеченные и смоделированные множества относительных времен.
На стадии 208 отбрасывания данных наблюдения если множества оказываются несходными, процессор 22 сохраняет или отбрасывает неверные значения DOA и расстояния как неуказывающие. На этапе агрегирования 210 все данные наблюдения, имеющие множества извлеченных и смоделированных относительных времен, которые оказываются сходными (т.е. прошедшими предварительную фильтрацию), агрегируются процессором 22 в отдельные распределения в зависимости от DOA и расстояния (например, в приведенные ниже гистограммы 70 и 72 на Фиг. 11A и 11B). Как показано ниже на Фиг. 11A и 11B, агрегированные DOA и расстояние статистически анализируют для определения местоположения фокального источника, если на основании гистограммы он считается существующим.
Пример блок-схемы, показанный на Фиг. 5, выбран исключительно для обеспечения концептуальной ясности. Как правило, могут выполняться дополнительные стадии для получения анатомической карты, такие как, например, инициируемое врачом 32 анатомическое картирование соответствующих частей сердца 12 (например, с использованием процедуры быстрого анатомического картирования (FAM)). Критерии могут отличаться в зависимости от типа используемых статистических инструментов. В примерном варианте осуществления отброшенные множества смоделированных отметок времени все еще могут использоваться для корректировки соответствующих изначально аннотированных времен, которые не являются четко определенными, как описано ниже в разделе «Улучшения LAT».
ПОЛУЧЕНИЕ И ПРОВЕРКА НАПРАВЛЕНИЯ ПРИХОДА (DOA) И РАССТОЯНИЯ С ПОМОЩЬЮ ВТОРОГО СПОСОБА
На Фиг. 6 представлена блок-схема, которая схематически иллюстрирует способ получения направления прихода (DOA) от фокального источника в соответствии с примером осуществления настоящего изобретения.
Процесс, показанный на Фиг. 6, начинается с того, что на стадии 300 извлечения относительных времен процессор 22 извлекает относительные времена прихода 66 из изначально аннотированных ЭФ-сигналов. Затем на этапе 304 проверки проекций алгоритм проверяет, следует применять оценивание 3D или 2D взвешенной модели DOA, путем проверки, является ли действительным проецирование (т.е. стадия 302 проецирования) катетера на 2D пространство, как описано ниже.
Затем, в зависимости от того, была ли стадия 304 проецирования признана недействительной стадией или действительной стадией, процессор 22 запускает 3D взвешенную модель нахождения DOA на стадии 306 3D моделирования или 2D взвешенную модель нахождения DOA на стадии 308 2D моделирования, соответственно.
На стадии 310 оценивания погрешности при использовании 3D или 2D моделей процессор 22 затем проверяет, находятся ли расчетные погрешности между смоделированными и извлеченными относительными значениями времени ниже заданного порогового значения.
Если погрешности оценивания находятся в пределах заданного порогового значения, процессор 22 применяет расчет по улучшению LAT, чтобы сделать оценивание DOA более точным, на стадии 312 улучшения LAT. Улучшения LAT дополнительно описаны ниже.
Если, с другой стороны, погрешности оценивания выше заданного порогового значения, процессор 22 запускает итерационную модель DOA на стадии 314 итерационного оценивания DOA.
На стадии 316 последующего оценивания погрешности процессор 22 затем проверяет, находятся ли погрешности оценивания, пересчитанные с использованием итерационной модели, ниже заданного порогового значения. Если нет, на стадии 318 отбрасывания данных наблюдения процессор 22 сохраняет или отбрасывает неверные значения DOA и расстояния как неуказывающие. Если, при этом, итерационная модель была успешной, процессор 22 применяет к результатам стадию 312 улучшения LAT.
В любом случае, с помощью процессора 22 на стадии агрегирования 320 агрегируются улучшенные оценки успешно предварительно отфильтрованных DOA и расстояния. Как показано ниже, агрегированные значения DOA подвергают статистическому анализу для нахождения одного или более местоположений фокального источника, если на основании статистической модели они считаются существующими.
В одном примере осуществления описанный на Фиг. 6 способ получения DOA и направления использует функцию стоимости в 3D пространстве, как описано на Фиг. 7A-7C.
На Фиг. 7A-7C представлены, соответственно (a) диаграмма, на которой показаны графики однополярных ЭФ-сигналов, полученных системой, показанной на Фиг. 1, (b) местоположение катетера 14 и (c) изохронная карта, отображающая соответствующие погрешности 550 оценивания в извлеченных ЭФ-значениях, в соответствии с примером осуществления настоящего изобретения. Более конкретно, на Фиг. 7B показано местоположение дистального конца 18 катетера 14 катетера 14 в пространстве X-Y и фактическое местоположение 338 катетера на анатомической области левого предсердия 340.
Погрешности 550 оценивания (т.е. погрешности 550 отметок времени) показаны на Фиг. 7A, 8A и 9A, как разность по времени между исходными аннотациями и скорректированными аннотациями.
На Фиг. 7A показано множество однополярных сигналов 330 с измеренным и изначально аннотированным временем 332 (ti - кружки) и соответствующие расчетные времена 334 локальной активации ( - квадратики), т.е., скорректированные аннотации, которые были получены с использованием описанной ниже модели функции стоимости. Расчетные погрешности 550 между измеренными и смоделированными ЭФ-значениями времен активации рассчитывают для каждого электрода как разность по времени
- квадратики), т.е., скорректированные аннотации, которые были получены с использованием описанной ниже модели функции стоимости. Расчетные погрешности 550 между измеренными и смоделированными ЭФ-значениями времен активации рассчитывают для каждого электрода как разность по времени  , как более подробно описано ниже.
, как более подробно описано ниже.
Модель DOA, основанную на функции стоимости применяют для каждых данных наблюдения, содержащих множество из по меньшей мере 10 локальных активаций предсердия,  , время локальной активации предсердия i электрода,
, время локальной активации предсердия i электрода,  , где N представляет собой число действительных электродов катетера, например, N=20 для катетера PentaRay®. Если предполагается, что одна ЭФ-волна исходит из любой точки 3D пространства и перемещается в направлении катетера с постоянной скоростью проводимости (CV), тогда функция стоимости
, где N представляет собой число действительных электродов катетера, например, N=20 для катетера PentaRay®. Если предполагается, что одна ЭФ-волна исходит из любой точки 3D пространства и перемещается в направлении катетера с постоянной скоростью проводимости (CV), тогда функция стоимости  может быть определена для «полной стоимости» модели:
может быть определена для «полной стоимости» модели:
Ур. 4

В ур. 4,  , определяется как расстояние от точки DOA, расположенной в (
, определяется как расстояние от точки DOA, расположенной в ( ,
, ) и приходящей в i электроду, расположенному в
) и приходящей в i электроду, расположенному в  . Время
. Время  определяется как время смещения прихода для всех электродов и
определяется как время смещения прихода для всех электродов и  представляет собой 1/CV волны. Элемент
представляет собой 1/CV волны. Элемент  в представляет собой элемент регуляризации и это эффективно дает предпочтение решению, которое находится ближе к дистальному концу 18 катетера и, таким образом, повышает вероятность нахождения решений в пределах анатомической области предсердия. Целью этой модели является минимизация стоимости путем нахождения «наилучшего»
в представляет собой элемент регуляризации и это эффективно дает предпочтение решению, которое находится ближе к дистальному концу 18 катетера и, таким образом, повышает вероятность нахождения решений в пределах анатомической области предсердия. Целью этой модели является минимизация стоимости путем нахождения «наилучшего»  = (,
= (, ), которое минимизирует стоимость , причем это может быть выполнено с использованием процедуры оценки градиентного спуска с ограничением
), которое минимизирует стоимость , причем это может быть выполнено с использованием процедуры оценки градиентного спуска с ограничением , которое превышает нулевое значение. Градиентный спуск основан на наблюдении того, что если функция нескольких переменных
, которое превышает нулевое значение. Градиентный спуск основан на наблюдении того, что если функция нескольких переменных  при k-ой итерации является определяемой и дифференцируемой в окрестностях точки
при k-ой итерации является определяемой и дифференцируемой в окрестностях точки  , тогда
, тогда  уменьшается быстрее, если она выходит из в направлении отрицательного градиента , так что
уменьшается быстрее, если она выходит из в направлении отрицательного градиента , так что  и ∇ представляет дифференциальную операцию и γ представляет собой коэффициент скорости обучения. γ должен быть малым, чтобы обеспечить преобразование, но не слишком малым для преодоления медленного преобразования или сходимости к локальному минимуму . Для формального описания алгоритма градиентного спуска получаем дифференциальное уравнение по каждому из параметров(,):
и ∇ представляет дифференциальную операцию и γ представляет собой коэффициент скорости обучения. γ должен быть малым, чтобы обеспечить преобразование, но не слишком малым для преодоления медленного преобразования или сходимости к локальному минимуму . Для формального описания алгоритма градиентного спуска получаем дифференциальное уравнение по каждому из параметров(,):
Ур. 5



На верхней иллюстрации Фиг. 7B представлена полученная расчетная фокальная активность. С помощью цветовой шкалы на Фиг. 7B (такой же как шкала 48 на Фиг. 4A и 4B) кодируют относительное время прихода цветом, кодирующим каждый из показанных двадцати электродов 16 катетера 14. Фиг. 7B дополнительно отображает отслеживаемые местоположения электродов 16 (поверх схематически помеченных отведений 15 катетера 14 Pentaray) в двух отдельных случаях, когда электроды получили ЭФ-сигналы. Местоположение каждого электрода 16 в 3D пространстве отслеживают с помощью, например, вышеуказанной методики отслеживания ACL. Система координат X-Y-Z (Z не показана) относится к неподвижной системе координат, такой как система 20 отслеживания местоположения, в которой применяется метод ACL.
В завершение также показаны полученное с помощью модели функции стоимости DOA 55 и расстояние 60, с которого произошло множество сигналов 330.
На Фиг. 7C (изохронная карта) показано, что проанализированная ЭФ-волна распространяется из местоположения 336 фокального источника внутри кольцевых линий 344, которые представляют время прихода в миллисекундах в соответствии с цветовой шкалой в правой части Фиг. 7C. Окружности 350 представляют собой местоположение электродов, причем число внутри окружности представляет собой отдельные погрешности 550 оценивания, полученные с помощью функции стоимости (т.е. для каждого электрода) на Фиг. 7A в миллисекундах.
Улучшения LAT
В некоторых примерах осуществления настоящего изобретения процессор корректирует изначально аннотированные времена ЭФ-сигнала путем выбора исходной аннотации в ЭФ-сигнале, определения скорректированной аннотации, соответствующей исходной аннотации, на основе оцененных DOA и расстояния и корректировки отметки времени ЭФ-сигнала при проверке того, что скорректированная аннотация соответствует заданному условию, как описано ниже.
Погрешности 550 оценивания получают (например, рассчитывают) с помощью процессора 22 путем расчета: (a) времен столкновения с использованием минимизации с помощью функции стоимости множества местоположения и скорости проводимости,  и измеренного местоположения электродов, и (b)расчета разности
и измеренного местоположения электродов, и (b)расчета разности  на каждый электрод.
на каждый электрод.
В одном примере осуществления значение LAT заменяют для улучшения оценивания LAT, если удовлетворяется одно из заданных условий 1-3:
1. находится в пределах фракционированного сигнала (не показан) или LAT двойного потенциала (такого как значение 333 ЭФ-сигнала электрода 15 на Фиг. 9A).
2. не является якорем, что означает вес LAT, как описано ниже во взвешенной модели (Ур. 6), составляет менее 0,3. LAT с низкими весами представляют собой LAT с «пологими» отклонениями напряжения (т.е. наклон напряжение-время ЭФ-сигнала является более пологим, чем предварительно заданный наклон), и, следовательно, его изначально аннотированное время, такое как исходная аннотация 525 на Фиг. 9A, является менее «надежной».
3. и одновременно находятся между начальной и конечной точками однополярного отрицательного отклонения (например, отрицательного отклонения 555 ЭФ-сигнала электрода 16 на Фиг. 9A).
Описание продолжается еще для одного объекта, описывающего упрощенное осуществление функции стоимости.
В некоторых примерах осуществления может быть применена функция стоимости в пространстве 2D. В 2D модели катетер проецируют на поверхность; это выполняется путем взятия двух собственных векторов с наиболее высокими собственными значениями. Если энергия, сохраненная двумя собственными векторами, превышает 95%, то модель предполагает, что проекция от 3D пространства на поверхность является действительной, и набор уравнений упрощается, =(, ), без размера z.
), без размера z.
В некоторых примерах осуществления в алгоритме используется альтернативная стадия оценивания DOA, включающая оценивание DOA с использованием взвешенной функции стоимости, которая описана на Фиг. 8A и 8B.
На Фиг. 8A и 8B, соответственно, представлена диаграмма, на которой показаны графики однополярных ЭФ-сигналов 440, полученных системой, показанной на Фиг. 1, и изохронная карта, на которой показаны соответствующие погрешности оценивания в извлеченных ЭФ-значениях, в соответствии с примером осуществления настоящего изобретения. Основной концепцией описанной ниже модели DOA с взвешенной функцией стоимости является то, что «острая» активация является более «надежной» чем пологая активация, когда степень заостренности определяется на основе dv/dt однополярного сигнала в  . Каждое сопоставляется с весом
. Каждое сопоставляется с весом  в диапазоне от 0 до 1 в зависимости от его dv/dt. На Фиг. 8A число вблизи каждого кружка представляет собой вес наклона.
в диапазоне от 0 до 1 в зависимости от его dv/dt. На Фиг. 8A число вблизи каждого кружка представляет собой вес наклона.
Отметим также на Фиг. 8A, что некоторые ЭФ-сигналы содержат наиболее ранние структуры S-волны, например, в сигналах 444, регистрируемых электродами E19 и E20 (вместе 448). Такие структуры с отрицательным наклоном, без амплитуды сигнала, сначала возрастающей по мере приближения ЭФ-волны к электроду, указывают на аберрантную фокальную ЭФ-волну, распространяющуюся от электродов. Это состояние указывает на то, что катетер 14 находится «прямо на цели», где некоторые из электродов расположены вблизи фокального источника аритмии (например, расстояние 60 меньше длины отведения 15).
Как показано на Фиг. 8B, расчетное местоположение 446 фокального источника, полученное с использованием взвешенной функции стоимости, по меньшей мере частично окружено измеренными местоположениями электродов 16.
Необходимое изменение в наборе уравнений для 2D модели функции стоимости (т.е. ур. 5, исключая z-зависимость) приводится далее:
Ур. 6



В некоторых примерах осуществления, если погрешности оценивания относительных времен превышают заданное пороговое значение, применяется итерационный процесс оценивания DOA, который описан на Фиг. 9A и 9B, Фиг. 10A и 10B, и Фиг. 11A и 11B.
На Фиг. 9A и 9B, соответственно, представлена диаграмма, на которой показаны графики однополярных ЭФ-сигналов, имеющих погрешности 550 оценивания выше заданного порогового значения, и соответствующее первоначально рассчитанное местоположение 560 фокального источника в пространстве X-Y в соответствии с примером осуществления настоящего изобретения. Более того, некоторые ЭФ-значения обнаруживаются внутри LAT двойного потенциала (такого как скорректированное значение 333 аннотации ЭФ-сигнала электрода 15 на Фиг. 9A). Также некоторые ЭФ-значения (как измеренные, так и расчетные значения) обнаружены между начальной и конечной точками однополярного отрицательного отклонения (например, в пределах отрицательного отклонения 555 ЭФ-сигнала электрода 16 на Фиг. 9A).
Как показано на Фиг. 9B, местоположение 560 находится очень близко к местоположению дистального конца катетера, однако, учитывая вышеуказанные наблюдения, это местоположение, вероятно, является ошибочным.
В одном примере осуществления, если средняя погрешность оценивания превышает заданное пороговое значение (например, 7 мс), процессор 22 выполняет итерационный расчет для оценивания DOA. Средняя погрешность оценивания на Фиг. 9A составляет 12,4 мс. В каждой итерации время локальной активации с самой высокой погрешностью оценивания удаляют из оценивания DOA. Этот процесс повторяют до тех пор, пока существует более десяти действительных значений времени локальной активации.
На Фиг. 10 представлен график, на котором показано расчетное местоположение фокального источника 560, показанного на Фиг. 9B, в девяти итерациях итерационной модели DOA в соответствии с примером осуществления настоящего изобретения. В нулевой и первой итерациях местоположение 560 фокального источника почти совпадает с местоположением дистального конца 18 катетера, однако от второй итерации до девятой итерации местоположение фокальной активности смещается и, в конечном итоге, размещается (570) вблизи электрода «1». Как показано на Фиг. 10, закрашенные кружки представляют собой действительные электроды для оценивания DOA, в то время как незакрашенные кружки представляют собой недействительные электроды для оценивания DOA. Пометка «итер x» рядом с кольцевым электродом указывает на то, что определенный электрод был исключен из оценивания DOA при итерации x. Процентное соотношение недействительных сегментов является хорошей мерой для «сложности» МА у данного субъекта.
Между нулевой итерацией и девятой итерацией максимальная погрешность оценивания находится в диапазоне от приблизительно 25 мс до менее 5 мс. Скорость проводимости CV, которая также служит в качестве оценки стоимости в ур. 4, уменьшается от более 100 мм/мс до минимального значения 0,5 мм/мс.
Описанная итерационная модель применяется при обработке данных наблюдения, имеющих шумные формы сигнала или в случаях, когда к катетеру распространяется более одной волны.
Первый и второй методы статистических тестов
Продолжительность обычных данных наблюдения составляет 100-200 мс. Обычная запись включает 30 секунд однополярных сигналов и, таким образом, содержит приблизительно 120-200 данных наблюдения. Все действительные оценки DOA из приблизительно 120-200 данных наблюдения сохраняются, затем агрегируются до тех пор, пока не будут обработаны все данные наблюдения, а затем к совокупности действительных оценок DOA применяют статистический метод.
Первый статистический метод
Как отмечалось выше и описано в этом разделе, процессор 22 помещает агрегированные значения DOA и расстояния в гистограммы и статистически анализирует гистограммы. В одном примере осуществления процессор выполнен с возможностью получения из гистограмм расчетного местоположения путем подгонки кривой к гистограммам и нахождения максимального значения кривой в зависимости от оцененного DOA и расстояния.
На Фиг. 11A и 11B представлены гистограммы 70A и 70B направления прихода (DOA) и гистограммы 72A и 72B расстояния от фокального источника, соответственно, в соответствии с примером осуществления настоящего изобретения. Как видно, распределение DOA состоит из числа данных наблюдения на каждое значение DOA, а распределение расстояния состоит из числа данных наблюдения на каждое значение расстояния. Как правило, процессор 22 компилирует (т.е. агрегирует) гистограммы 70A и 70B и гистограммы 72A и 72B из числа в диапазоне от нескольких десятков до нескольких сотен данных наблюдения, прошедших стадию предварительной фильтрации, как показано на Фиг. 2 и проанализировано на Фиг. 3.
При помощи статистического теста, процессор 22 сначала проверяет, приводит ли распределение DOA, как показано в примере на гистограммах DOA, показанных на Фиг. 11A и 11B, к непротиворечивому значению DOA. Примеры средств тестирования на непротиворечивость включают в себя, без ограничений, алгоритм оценивания непротиворечивости и использование доверительного интервала.
Если обнаруживается, что DOA является противоречивым, например, с помощью распределения, указывающего на два или более по существу разные значения DOA, процессор 22 завершает описанные процессы идентификации фокального источника. В одном примере осуществления процессор 22 предоставляет пользователю уведомление о том, что процесс не выявил фокального источника аритмогенной активности.
Если процессор 22 получает непротиворечивое значение DOA из распределения данных наблюдения в зависимости от DOA, то процессор 22 наилучшим образом оценивает из распределений DOA и расстояние до соответствующего фокального источника. Затем процессор 22 использует наилучшие расчетные DOA и расстояние для определения местоположения фокального источника аритмогенной активности в сердце 12, который сгенерировал принятые ЭФ-сигналы.
Как видно на Фиг. 11A, наиболее преобладающие значения DOA клинического случая, проанализированного с помощью гистограммы 70A на Фиг. 11A, находятся около DOA со значением 0,85π. Соответствующее наиболее распространенное расстояние, указанное гистограммой 72A, составляет приблизительно 300 мм. Таким образом, процессор 22 может идентифицировать для этого пациента наличие местоположения фокальной аритмии на расстоянии приблизительно 300 мм от местоположения дистального конца 18 под углом 0,85π относительно оси X.
На Фиг. 11B показано, что наиболее преобладающие значения DOA клинического случая, проанализированного с помощью гистограммы 70B на Фиг. 11B, находятся около DOA со значением 0,5π. Соответствующее наиболее распространенное расстояние, указанное гистограммой 72B, составляет приблизительно 300 мм. Таким образом, процессор 22 может идентифицировать для этого пациента наличие местоположения фокальной аритмии на расстоянии приблизительно 300 мм от местоположения дистального конца 18 под углом 0,5π относительно оси X.
Второй статистический метод
На Фиг. 12 представлен график, на котором показаны кластеры DOA, проанализированные с помощью модели кластеризации k-средних в соответствии с примером осуществления настоящего изобретения. Модель кластеризации k-средних была применена процессором 22 к множеству значений DOA, прошедших предварительную фильтрацию и агрегированных в пространстве X-Y.
На Фиг. 12 кружок представляет собой оценку DOA из данных наблюдения значений LAT из ряда данных наблюдения, включенных в один сеанс записи. В показанных результатах записи имеются два кластера DOA, которые «поясняют» данные. Первый кластер 80 (красный кружок в (-3,7 мм, -0,2 мм)) содержит 80,5% DOA, а второй кластер 88 имеет 19,5% содержит 19,5% DOA в записи.
Если расчетное местоположение одного из доминирующих кластеров (более 10% сегментов DOA) может быть спроецировано на анатомическую область, то есть расстояние от расчетного местоположения, такого как приблизительное местоположение 84, до анатомической области меньше заданного значения, например, 6 мм, (настраиваемое), то определяется фокальный источник. Как видно на Фиг. 12, расстояние от местоположения 84, рассчитанного с помощью кластеризации k-средних, к анатомическому местоположению 90, которое задается длиной стрелки 85, составляет приблизительно 3 мм, что значительно ниже верхнего предела 6 мм. Таким образом, с помощью описанной методики местоположение 90 было проверено в качестве источника фокусировки.
Источник фокусировки также может быть проверен, если находят по меньшей мере 10 указаний (настраиваемых) наиболее ранних структур S волн в электродах, размещенных в радиусе 6 мм от фокуса. Важно отметить, что обнаружение фокусов, основанное на DOA, может проявляться в определенном местоположении на анатомической области без размещения катетера в области фокальной активности, поэтому процесс подтверждения является необязательным.
Несмотря на то что примеры осуществления, описанные в настоящем документе, главным образом касаются кардиологических применений, способы и системы, описанные в настоящем документе, можно также применять в других областях применения, например, в неврологии. Описанные способы также можно применять с любым набором данных, который включает пространственно-временные «сигналы» для фокальной активности, и процессору необходимо найти данную фокальную активность, например, для фокальной оценки эпилептических пациентов с помощью ЭЭГ/МЭГ.
Таким образом, следует понимать, что описанные выше примеры осуществления приведены лишь в качестве примера, и что настоящее изобретение не ограничено конкретно изображенным и описанным выше в настоящем документе. Напротив, объем настоящего изобретения включает в себя как комбинации, так и подкомбинации различных вышеописанных признаков, а также их варианты и модификации, которые будут очевидны специалистам в данной области после ознакомления с приведенным выше описанием и которые не были описаны на предшествующем уровне техники. Документы, включенные в настоящую заявку на патент путем ссылки, следует считать неотъемлемой частью заявки, за исключением того, что, если определение терминов в этих включенных документах противоречит определениям, сделанным явным или неявным образом в настоящем описании, следует учитывать только определения настоящего описания.


Группа изобретений относятся к медицине, а именно к способу и системе для оценивания погрешностей времен локальной активации. Система содержит интерфейс и процессор. Интерфейс выполнен с возможностью приема совокупности данных наблюдения, полученных электродами в сердце. При исполнении способа принимают посредством электродов в сердце совокупность данных наблюдения. Каждые данные наблюдения содержат набор электрофизиологических сигналов, являющихся сигналами времени локальной активации, измеренных электродами. С помощью процессора оценивают по меньшей мере некоторые данные наблюдения соответствующего направления прихода и соответствующего расстояния относительно электродов, от которых исходил набор ЭФ-сигналов. При этом используют расчетное направление прихода и расстояние и рассчитывают для каждых данных наблюдения смоделированный набор относительных времен прихода. Путем применения заданного геометрического теста определяют степень сходства между извлеченным набором и смоделированным набором относительных времен прихода для каждых данных наблюдения. Корректируют отметки времени ЭФ-сигнала таким образом, чтобы она соответствовала оцененным направлениям прихода и расстоянию и исправляла погрешность. Формируют ЭФ-карты сердца с использованием набора ЭФ-сигналов, включающего откорректированный ЭФ-сигнал. Обеспечивается оценка погрешности времен локальной активации, что позволяет скорректировать отметки времен локальной активации на карте, за счет чего достигается более точное электрофизиологическое картирование сердца. 2 н. и 12 з.п. ф-лы, 12 ил.
1. Способ оценивания погрешностей времен локальной активации, включающий:
прием посредством электродов в сердце совокупности данных наблюдения, причем каждые данные наблюдения содержат набор электрофизиологических (ЭФ) сигналов, являющихся сигналами времени локальной активации, измеренных электродами;
оценивание для по меньшей мере некоторых данных наблюдения соответствующего направления прихода (DOA) и соответствующего расстояния относительно электродов, от которых исходил набор ЭФ-сигналов, причем, используя расчетное DOA и расстояние, рассчитывают для каждых данных наблюдения смоделированный набор относительных времен прихода, и
определение степени сходства, путем применения заданного геометрического теста, между извлеченным набором и смоделированным набором относительных времен прихода для каждых данных наблюдения;
корректировку отметки времени ЭФ-сигнала таким образом, чтобы она соответствовала оцененным DOA и расстоянию и исправляла погрешность; и
формирование ЭФ-карты по меньшей мере части сердца с использованием набора ЭФ-сигналов, включающего откорректированный ЭФ-сигнал.
2. Способ по п. 1, при котором формирование ЭФ-карты включает формирование карты времен локальной активации (LAT).
3. Способ по п. 1, при котором оценивание DOA и расстояния включает получение DOA и расстояния, которые минимизируют функцию стоимости.
4. Способ по п. 1, при котором корректировка отметки времени ЭФ-сигнала включает:
выбор исходной аннотации в ЭФ-сигнале;
определение скорректированной аннотации, соответствующей исходной аннотации, на основе оцененных DOA и расстояния; и
корректировку отметки времени ЭФ-сигнала при проверке того, что скорректированная аннотация соответствует заданному условию.
5. Способ по п. 4, при котором проверка того, что скорректированная аннотация соответствует заданному условию, включает проверку того, что скорректированная аннотация попадает в углубление между соседними пиками в ЭФ-сигнале.
6. Способ по п. 4, при котором проверка того, что скорректированная аннотация соответствует заданному условию, включает проверку того, что скорректированная аннотация и исходная аннотация лежат на одном и том же монотонно убывающем сегменте ЭФ-сигнала.
7. Способ по п. 4, при котором проверка того, что скорректированная аннотация соответствует заданному условию, включает проверку того, что скорректированная аннотация и исходная аннотация лежат на одном и том же монотонном сегменте ЭФ-сигнала и что наклон сегмента ниже заданного порогового наклона.
8. Система для оценивания погрешностей времен локальной активации, содержащая:
интерфейс, выполненный с возможностью приема совокупности данных наблюдения, полученных электродами в сердце, причем каждые данные наблюдения содержат набор электрофизиологических (ЭФ) сигналов; и
процессор, выполненный с возможностью:
- оценивания для по меньшей мере некоторых данных наблюдения соответствующего направления прихода (DOA) и соответствующего расстояния относительно электродов, от которых исходили ЭФ-сигналы,
причем, используя расчетное DOA и расстояние, процессор рассчитывает для каждых данных наблюдения смоделированный набор относительных времен прихода, и
определения степени сходства, путем применения заданного геометрического теста, между извлеченным набором и смоделированным набором относительных времен прихода для каждых данных наблюдения;
- корректировки отметки времени ЭФ-сигнала времени локальной активации таким образом, чтобы она соответствовала оцененным DOA и расстоянию и исправляла погрешность; и
- формирования ЭФ-карты по меньшей мере части сердца с использованием набора ЭФ-сигналов, включающего откорректированный ЭФ-сигнал.
9. Система по п. 8, в которой ЭФ-карта содержит карту времени локальной активации (LAT).
10. Система по п. 8, в которой процессор выполнен с возможностью оценивания DOA и расстояния путем получения DOA и расстояния, которые минимизируют функцию стоимости.
11. Система по п. 8, в которой процессор выполнен с возможностью корректировки отметки времени ЭФ-сигнала путем:
выбора исходной аннотации в ЭФ-сигнале;
определения скорректированной аннотации, соответствующей исходной аннотации, на основе оцененных DOA и расстояния; и
корректировки отметки времени ЭФ-сигнала при проверке того, что скорректированная аннотация соответствует заданному условию.
12. Система по п. 11, в которой процессор выполнен с возможностью проверки того, что скорректированная аннотация соответствует заданному условию, путем проверки того, что скорректированная аннотация попадает в углубление между соседними пиками в ЭФ-сигнале.
13. Система по п. 11, в которой процессор выполнен с возможностью проверки того, что скорректированная аннотация соответствует заданному условию, путем проверки того, что скорректированная аннотация и исходная аннотация лежат на одном и том же монотонно убывающем сегменте ЭФ-сигнала.
14. Система по п. 11, в которой процессор выполнен с возможностью проверки того, что скорректированная аннотация соответствует заданному условию, путем проверки того, что скорректированная аннотация и исходная аннотация лежат на одном и том же монотонном сегменте ЭФ-сигнала и что наклон сегмента ниже заданного порогового наклона.
| RONEY CAROLINE H et al.: "An automated algorithm for determining conduction velocity, wavefront direction and origin of focal cardiac arrhythmias using a multipolar catheter", 2014, Annual International Conference of the IEEE Engineering Medical and Biology Society | |||
| RU 2007142451 A, 27.05.2009 | |||
| US 2017281031 A1, 05.10.2017 | |||
| JP 3712265 B2, |

