ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области систем автоматизированного управления, в частности к системам управления тепловой нагрузкой, и может быть использовано для автоматизации управления подачей топлива для котельной системы.
УРОВЕНЬ ТЕХНИКИ
Для эффективной работы котельных систем важным фактором является адекватное регулирование в соответствии с заданными параметрами работы. В случае работы угольного котла с неизменным составом исполнительных механизмов передаточная функция контура не меняется, и автоматизация управления тепловой нагрузкой для такой группы может быть реализована посредством схемы, где один единый управляющий сигнал подается на все исполнительные механизмы подачи топлива. Но при изменении состава исполнительных механизмов, то есть при включении дополнительных питателей топлива или отключении некоторых питателей при тех же параметрах регулятора контур регулирования меняет свои характеристики: при включении дополнительных исполнительных механизмов управление становится очень быстрым, с большой колебательностью, а в случае отключения исполнительных механизмов реакция на управляющий сигнал становится затянутой.
Одно из решений, применяемых для решения автоматизации управления тепловой нагрузкой котельной группы - это включение в контур автоматизации пропорционально-интегрально-дифференцирующего (ПИД) регулятора со своим набором параметров для каждого возможного числа подключенных к регулированию исполнительных механизмов. Однако на практике настройка и отладка работы такой системы регулирования занимает очень много времени и зачастую требует перенастройки при модернизации управляемой системы.
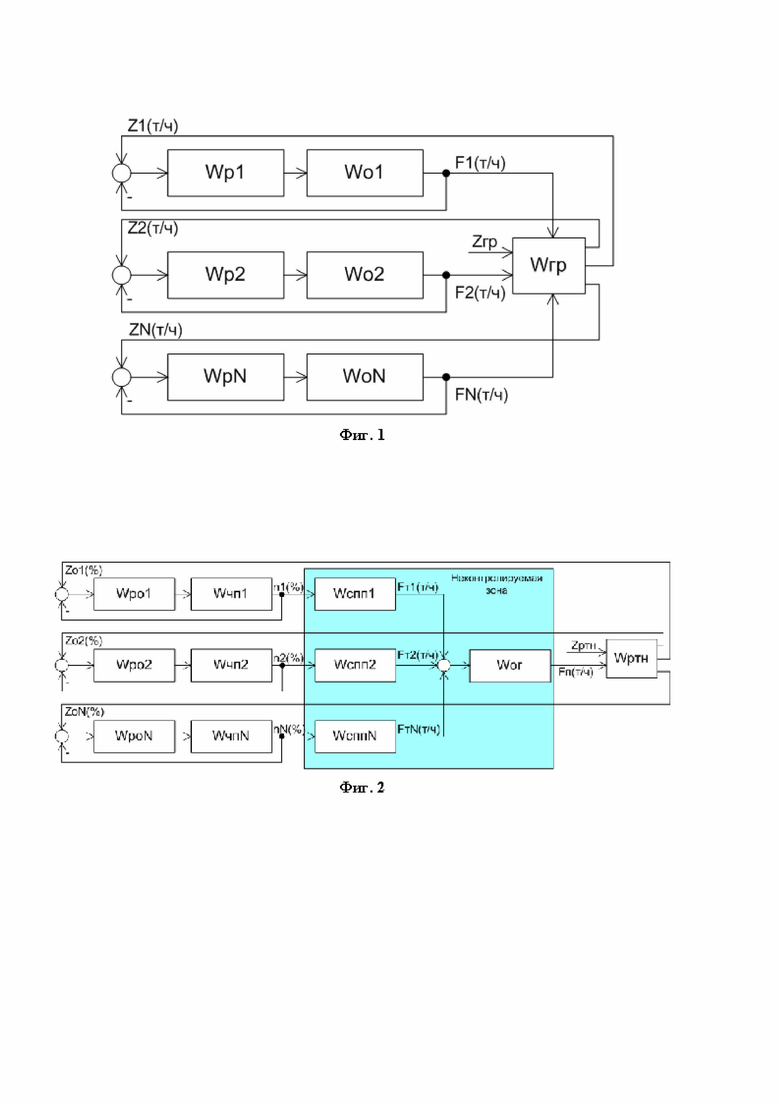
В документе KR101778123B1 раскрыт регулятор нагрузки котельной системы, содержащей котлы с регулируемыми уровнями горения, причём регулятор содержит программу, выполняемую для каждого котла отдельно, а общая нагрузка, распределяемая на группу котлов, больше или равна требуемой нагрузке и зависит от требуемого количества пара. Известному регулятору возможно задать требуемую мощность на основании требуемого количества пара и контролировать выполнение задания. Структурная схема такого регулятора имеет вид параллельных контуров управления, с обратными связями по основной регулируемой величине и упрощенно представлена на Фиг. 1, где:
Wр1 - WрN - передаточная функция регулятора нагрузки котла 1…N;
Wo1 - WoN - передаточные функции котла по тепловой нагрузке 1…N;
Zгр - задание по тепловой нагрузке на группу;
Z1 - ZN - задания главного регулятора на каждый котел;
Wгр - передаточная функция главного регулятора.
Однако, в случае твердотопливных котлов, использующих шнековые или скребковые питатели, реальную производительность системы пылеприготовления (СПП), содержащей питатель и мельницу, контролировать невозможно, так как она зависит от очень большого количества факторов: марки угля, его влажности, положения шибера на бункере угля и других. Таким образом, даже при применении известного регулятора тепловой нагрузки, остаётся проблема регулирования подачи топлива для пылеугольных котельных установок, учитывая, что известна только суммарная производительность всех механизмов подачи топлива, а возможности точного измерения производительности каждого конкретного исполнительного механизма нет.
Структурная схема регулятора тепловой нагрузки для угольного котла характеризуется наличием неконтролируемой зоны, отсутствием параллельных контуров управления с обратными связями по основной регулируемой величине и представлена на Фиг. 2:
Wро1 - WроN - передаточная функция регулятора оборотов частотного привода питателя 1…N;
Wчп1 - WчпN - передаточная функция частотного привода питателя 1…N;
n1 - nN - скорость вращения частотного привода питателя 1…N в % от зоны регулирования;
Wспп1 - WсппN - передаточная функция системы пылеприготовления 1…N;
Fт1 - FтN - расход топлива, вдуваемого в топку пылесистемой 1…N в т/ч;
Wог - передаточная функция горения топлива в топке котла и парообразования;
Fп - расход пара на выходе из котла в т/ч.
Таким образом, регулятором тепловой нагрузки для угольного котла может быть задана только скорость вращения питателя, а возможности контроля процесса парообразования по каждому параллельному потоку нет.
Для обеспечения стабильности работы котла в переходных процессах необходимо автоматическое перераспределение задания от регулятора тепловой нагрузки на исполнительные механизмы, способные отработать данное задание. При этом перераспределение должно выполняться таким образом, чтобы изменение передаточной функции контура регулирования (ее динамические параметры) было минимальным. В свою очередь, для обеспечения максимального КПД котельного агрегата необходимо равномерное формирование пылеугольного факела по всему объему топочного пространства, для чего требуется одинаковая загрузка исполнительных механизмов.
Таким образом, известны способы и устройства для распределения тепловой нагрузки на группу котлов, работающих с общим коллектором, но остаётся необходимость в устройствах распределения нагрузки на группу топочных устройств котла, в частности пылеугольных питателей для паровых котлов. То есть, существует необходимость в регуляторе тепловой нагрузки пылеугольного котла, который бы обеспечивал распределение выработанного управляющего сигнала изменения парообразования на исполнительные механизмы подачи пылеугольной смеси переменной численности, был бы прост в настройке, имел бы улучшенные динамические характеристики контура регулирования тепловой нагрузки, повышенные управляемость, устойчивость и линейность контура регулирования тепловой нагрузки, а также был бы универсальным для систем с различным количеством питателей.
Эти задачи успешно решаются применением модуля распределения управляющего воздействия на группу механизмов подачи топлива для регулятора тепловой нагрузки пылеугольного котла и регулятора тепловой нагрузки пылеугольного котла, содержащего такой модуль, согласно настоящему изобретению.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению предложены модуль распределения управляющего воздействия на группу механизмов подачи топлива от регулятора тепловой нагрузки пылеугольного котла и содержащий указанный модуль регулятор тепловой нагрузки пылеугольного котла, который обеспечивает стабильность работы группы механизмов подачи топлива переменной численности и распределение управляющего сигнала на группу механизмов подачи топлива с обеспечением их стабильной и эффективной работы, а также позволяет реализовать легко настраиваемую универсальную систему с применением ПИД регулятора.
Данный технический результат достигается благодаря тому, что предлагаемый модуль распределения управляющего воздействия на группу механизмов подачи топлива выполнен с возможностью:
выработки индивидуального управляющего воздействия для каждого механизма подачи топлива, выбора механизма подачи топлива и передачи ему индивидуального управляющего воздействия с частотой дискретизации таким образом, что в каждый период дискретизации управляющее воздействие передаётся только на один из механизмов подачи топлива указанной группы;
причём модуль распределения управляющего воздействия выполнен с возможностью осуществлять указанные выбор механизма подачи топлива и выработку индивидуального управляющего воздействия на основании: сигналов (E+ и E-) увеличения или уменьшения производительности котла, сигналов (Vп1…Vпn) текущей скорости вращения двигателя каждого из механизмов подачи топлива, сигналов (PSU1_ON…PSUn_ON) включенного состояния каждого из механизмов подачи топлива, сигналов (PSU1_AUTO…PSUn_ AUTO) автоматического режима каждого из механизмов подачи топлива, сигналов (PSU1_BLOCK…PSUn_BLOCK) блокировки работы каждого из механизмов подачи топлива, сигналов (PSU1_STOP_CMD…PSUn_STOP_CMD) останова каждого из механизмов подачи топлива.
Благодаря тому, что модуль распределения управляющего воздействия выполнен с возможностью выработки индивидуального управляющего воздействия для каждого механизма подачи топлива, выбора механизма подачи топлива и передачи ему индивидуального управляющего воздействия с частотой дискретизации таким образом, что в каждый период дискретизации управляющее воздействие передаётся только на один из механизмов подачи топлива указанной группы, обеспечены единственный набор параметров модуля ПИД регулятора для различного набора механизмов подачи топлива, доступных для регулирования, простота настройки регулятора и устойчивость в переходных процессах, улучшенные динамические характеристики контура регулирования тепловой нагрузки, устойчивость и линейность контура регулирования тепловой нагрузки.
Благодаря тому, что модуль распределения управляющего воздействия выполнен с возможностью осуществлять указанные выбор механизма подачи топлива и выработку индивидуального управляющего воздействия на основании сигналов увеличения или уменьшения производительности котла (E+ и E-), сигналов текущей скорости вращения двигателя каждого из механизмов подачи топлива (Vп1…Vпn), сигналов включенного состояния каждого из механизмов подачи топлива (PSU1_ON…PSUn_ON), сигналов автоматического режима каждого из механизмов подачи топлива (PSU1_AUTO…PSUn_ AUTO), сигналов (PSU1_BLOCK…PSUn_BLOCK) блокировки работы каждого из механизмов подачи топлива, сигналов останова каждого из механизмов подачи топлива, обеспечиваются учёт текущего состояния каждого из механизмов подачи топлива и распределение выработанного управляющего сигнала на механизмы подачи топлива переменной численности, а также простота в настройке, улучшенные динамические характеристики контура регулирования тепловой нагрузки, повышенные управляемость, устойчивость и линейность контура регулирования тепловой нагрузки, возможность применения без необходимости существенной настройки и модификации для систем с различным количеством механизмов подачи топлива.
Согласно одному из вариантов реализации предлагаемого модуля, он также содержит модуль пропорционально-интегрально-дифференцирующего (ПИД) регулятора, который связан с модулем распределения управляющего воздействия посредством дискретных сигналов (E+ и E-) управления, сформированных методом широтно-импульсной модуляции.
Согласно ещё одному варианту реализации предлагаемого модуля распределения управляющего воздействия на группу механизмов подачи топлива, он выполнен с возможностью выработки сигналов (Z_PSU1…Z_PSUn) задания интенсивности подачи топлива и сигналов (SEL_PSU1…SEL_PSUn, DSEL_PSU1…DSEL_PSUn) выбора и отмены выбора механизма подачи топлива для регулирования тепловой нагрузки.
Согласно ещё одному варианту реализации предлагаемого регулятора, при разности сигналов (Z_PSU1…Z_PSUn) задания интенсивности подачи топлива у участвующих в регулировании механизмов подачи топлива более заданного относительного порогового значения в модуле ПИД-регулятора используют ширину зоны нечувствительности с нулевым значением, а фильтрацию сигнала основной обратной ПИД связи при этом отключают. Указанные особенности обеспечивают возможность балансировки нагрузки исполнительных механизмов в переходных процессах, когда происходит включение одного из механизмов подачи топлива.
Согласно ещё одному варианту реализации предлагаемого регулятора, n-й исполнительный механизм подачи топлива автоматически исключается из отработки управляющего воздействия в случае наличия сигнала (PSU1_BLOCK…PSUn_BLOCK) блокировки работы n-го механизма подачи топлива или сигнала (PSU1_STOP_CMD…PSUn_STOP_CMD) останова n-го механизмов подачи топлива.
Согласно настоящему изобретению также предложен регулятор тепловой нагрузки пылеугольного котла, содержащий модуль распределения управляющего воздействия на группу механизмов подачи топлива по любому из предложенных вариантов реализации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предлагаемое изобретение поясняется более подробно со ссылкой на прилагаемые чертежи.
На Фиг. 1 показана упрощенная структурная схема регулятора тепловой нагрузки согласно KR101778123B1
На Фиг. 2 показана структурная схема регулятора тепловой нагрузки угольного котла.
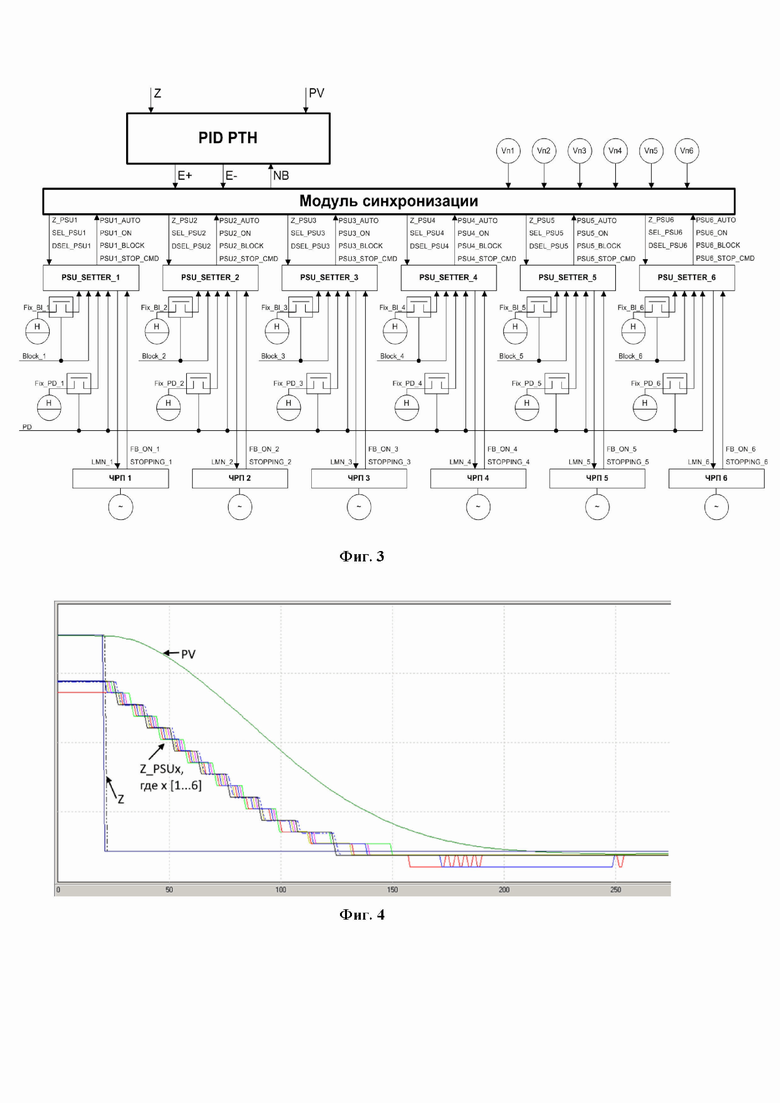
На Фиг. 3 показана функциональная схема контура регулирования тепловой нагрузки паровой пылеугольной котельной установки согласно одному из вариантов реализации предлагаемого изобретения.
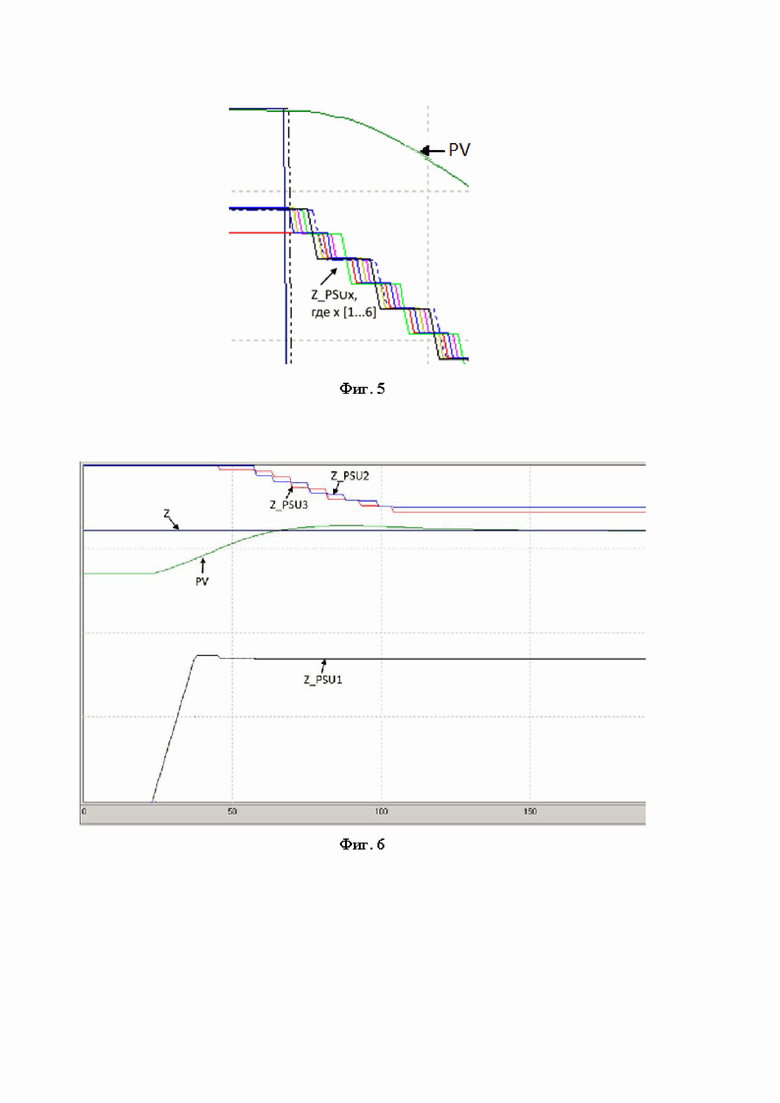
На Фиг. 4 изображен график математического моделирования работы регулятора тепловой нагрузки с идеальным регулятором тепловой нагрузки согласно одному из вариантов реализации изобретения при снижении тепловой нагрузки.
На Фиг. 5 представлен график математического моделирования изменения скорости вращения питателей сырого угля в результате работы регулятора тепловой нагрузки согласно одному из вариантов реализации предлагаемого изобретения в более крупном масштабе.
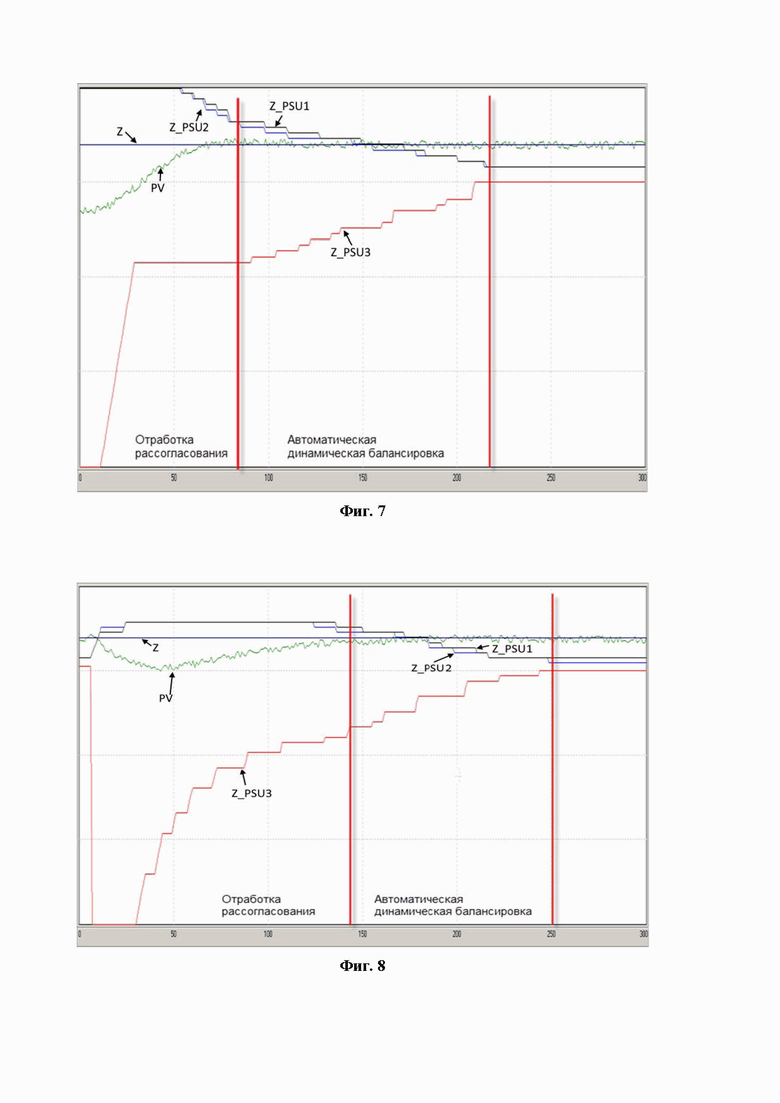
На Фиг. 6 показано математическое моделирование работы регулятора тепловой нагрузки идеальной системе без динамической балансировки задания скоростей исполнительных механизмов, когда мощности двух включённых питателей не хватает для выработки необходимого количества пара и к ним подключают третий питатель
На Фиг. 7 приведено моделирование работы регулятора тепловой нагрузки одному из вариантов реализации изобретения без фильтрации шума обратной связи при нехватке производительности двух включённых исполнительных механизмов и подключении третьего питателя
На Фиг. 8 показан график моделирования работы регулятора тепловой нагрузки согласно одному из вариантов реализации изобретения при перегрузке мельницы пылесистемы с временным отключением питателя данной мельницы
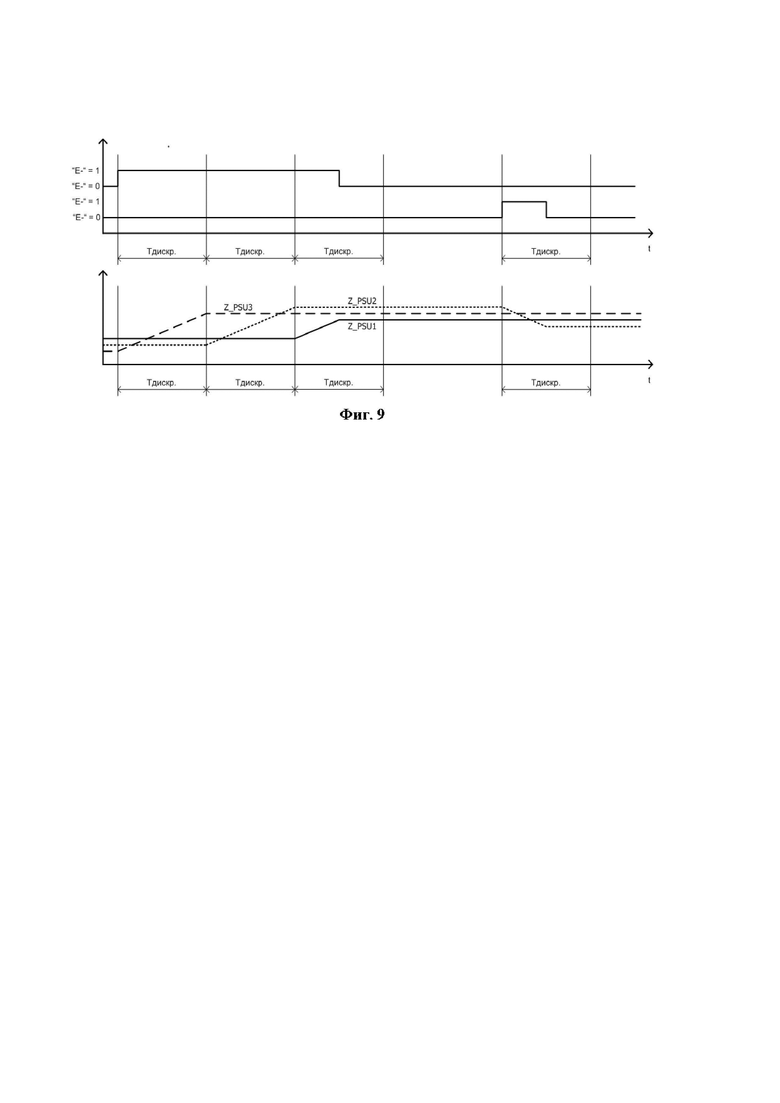
На Фиг. 9 показан принцип квантования управляющих импульсов E+ и E- и изменения управляющих воздействий для трех исполнительных механизмов, участвующих в регулировании.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 3 показана функциональная схема контура регулирования тепловой нагрузки паровой котельной системы согласно одному из вариантов реализации предлагаемого изобретения - согласно этому варианту, система содержит 6 питателей. Символ «n» здесь и далее обозначает номер используемого в контуре регулирования питателя, при этом количество питателей согласно изобретению не ограничено приведённым в качестве иллюстрации вариантом и может быть другим.
Регулятор, согласно рассматриваемому варианту реализации, содержит следующие функциональные модули:
- модуль ПИД-регулятора тепловой нагрузки (ПИД РТН) формирует управляющее воздействие (E+ и E-) на основании разницы между заданной паропроизводительностью (Z) котла и актуальным расчетным значением (PV);
- модуль распределения управляющего воздействия на группу исполнительных механизмов подачи твердого топлива.
Согласно одному из предпочтительных вариантов реализации, модуль распределения управляющего воздействия содержит следующие функциональные блоки:
- блок синхронизации - решает задачи регулятора топлива по выработке задания скорости вращения частотных приводов от управляющего воздействия ПИД РТН;
- PSU_SETTER_n - блоки задания скорости вращения и контроля частотно-регулируемого привода (ЧРП) питателя, выполнены с возможностью отслеживания задания скорости от модуля синхронизации, контроля сигналов системы технологических защит и блокировок котла (PD - срабатывание защиты на снижение нагрузки) и конкретной системы пылеприготовления (Block_n - блокировка работы питателя) и формирования конечного значения задания, выводимого на ЧРП с заданным темпом изменения задания;
- ЧРП_n - блоки изменения частоты электрического напряжения и скорости двигателя питателя. ЧРП отрабатывает задание, сформированное блоком задания скорости вращения питателя.
На схеме также показаны ключ-замыкатель, блоки введения значений Fix_PD_n, а также электродвигатели.
В модуле ПИД РТН используется ПИД-регулятор с выходными дискретными сигналами, сформированными в режиме широтно-импульсной модуляции. На вход ПИД РТН подаются задание (Z) паропроизводительности котла и действительное значение (PV) паропроизводительности. В соответствии с основами работы известных ПИД-регуляторов, выходной сигнал управления регулятора является суммой трех составляющих: пропорциональной, дифференциальной и интегральной. Пропорциональная составляющая зависит от текущего рассогласования и компенсирует его пропорционально его величине. Дифференциальная составляющая зависит от скорости изменения рассогласования и компенсирует резкие возмущения. Интегральная составляющая накапливает рассогласование, что позволяет ПИД-регулятору поддерживать нулевое рассогласование в установившемся режиме (данная составляющая устраняет статическую ошибку управления).
Согласно одному из вариантов реализации, модуль ПИД РТН имеет настроечные параметры:
- GAIN - коэффициент усиления;
- TI - постоянная времени интегрирования;
- DEADB_W - ширина зоны нечувствительности.
На практике возможны различные варианты реализации настройки данного модуля, в частности, согласно одному из вариантов реализации, значения указанных параметров модуля ПИД РТН определяются при наладке. Так, согласно одному из вариантов реализации рекомендуемыми начальными значениями могут быть следующие: GAIN = 1.0, TI = 1 сек, DEADB_W - 1% от номинального расхода пара от котла.
От блока синхронизации модуль ПИД РТН получает сигнал о необходимости автоматической динамической балансировки (NB), реализация которой будет описана далее. На выходе ПИД РТН формируются сигналы (E+ и E-) увеличения или уменьшения производительности котла. При автоматической динамической балансировке скоростей питателей используется ширина зоны нечувствительности с нулевым значением.
Блок синхронизации формирует псевдосинхронные значения заданий скорости вращения ЧРП питателей учётом того, что в каждый цикл регулирования задание скорости передают только одному исполнительному механизму, что позволяет обеспечить постоянную динамику регулирования вне зависимости от количества используемых исполнительных механизмов и переключение воздействия ПИД РТН. При этом синхронизация ведется по текущим значениям скоростей вращения ЧРП.
В качестве входных сигналов блок синхронизации использует:
- сигналы (E+ и E-) увеличения или уменьшения производительности котла,
- значения сигналов (Vп1…Vпn) скорости каждого ЧРП,
- сигналы (PSU1_ON…PSUn_ON) включенного состояния ЧРП от блоков задания скорости вращения и контроля ЧРП питателя,
- сигналы (PSU1_AUTO…PSUn_ AUTO) автоматического режима от блоков задания скорости вращения и контроля ЧРП питателя,
- сигналы (PSU1_BLOCK…PSUn_BLOCK) блокировки работы питателей от блоков задания скорости вращения и контроля ЧРП питателя,
- сигналы (PSU1_STOP_CMD…PSUn_STOP_CMD) выработанных команды останова ЧРП питателя от блоков задания скорости вращения и контроля ЧРП питателя.
Сигнал (E+ и E-) увеличения или уменьшения производительности котла от модуля ПИД РТН влияет на изменение скорости подключенных к регулированию питателей. Сигналы от блоков задания скорости вращения и контроля ЧРП питателя используются при выборе исполнительного устройства для распределения управляющего воздействия.
Блок синхронизации вырабатывает управляющие сигналы для блоков задания скорости вращения и контроля ЧРП питателя:
- сигналы (Z_PSU1…Z_PSUn) задания скорости ЧРП питателя,
- сигналы (SEL_PSU1…SEL_PSUn, DSEL_PSU1…DSEL_PSUn) выбора и отмены выбора питателя для регулирования тепловой нагрузки.
Блоки задания скорости вращения ПСУ и контроля ЧРП питателя отслеживают задания скорости из различных источников и формирует конечное значение, выводимое на частотный преобразователь с заданным темпом изменения задания. Каждый блок задания скорости вращения и контроля ЧРП питателя может работать в режимах «Автоматический», «Дистанционный». В режиме «Автоматический» ведется отработка (Z_PSU1…Z_PSUn) задания скорости ЧРП питателя от блока синхронизации. В дистанционном режиме задание скорости вводится оператором. Вне зависимости от выбранного режима при срабатывании сигналов (Block_n) «Блокировка питателя» или (PD) «Срабатывание защиты на снижение нагрузки» блок задания скорости вращения ПСУ копирует на выход технологически заданные фиксированные значения Fix_Bl_n и Fix_PD_n, соответственно.
Каждый блок задания скорости вращения и контроля ЧРП питателя имеет следующие индивидуальные основные входные сигналы:
- сигнал (Z_PSU) задания скорости ЧРП питателя от модуля синхронизации,
- сигнал (SEL_PSU, DSEL_PSU) выбора и отмены выбора ПСУ для регулирования тепловой нагрузки,
- сигнал (PD) срабатывания защиты на снижение нагрузки котла,
- сигнал (Fix_PD) значения скорости ПСУ при срабатывании защиты на снижение нагрузки,
- сигнал (Block) блокировки питателя,
- сигнал (Fix_Bl) значения скорости ПСУ при блокировке питателя,
- сигнал (FB_On) о том, что ЧРП питателя включен,
- сигнал (STOPPING) о том, что ЧРП питатель отключается.
Каждый блок задания скорости вращения и контроля ЧРП питателя вырабатывает сигналы (SEL_PSU, DSEL_PSU) выбора и отмены выбора ПСУ для регулирования тепловой нагрузки, меняющие режим работы блока задания скорости вращения и контроля ЧРП питателя на «Автоматический» или «Дистанционный» и сигналы (LMN) взаимодействия с модулем синхронизации и управляющее задание для ЧРП питателя, который управляет скоростью вращения двигателя питателя по управляющему заданию (LMN).
Работа предлагаемого регулятора тепловой нагрузки может быть проиллюстрирована следующими примерами.
На Фиг. 4-5 представлено математическое моделирование работы регулятора тепловой нагрузки согласно одному из вариантов реализации изобретения: изменение заданий скорости вращения питателей сырого угля (ПСУ) шести включенных в регулирование питателей имеет характерный вид «косичка» за счет алгоритма выбора единственного исполнительного механизма в каждый цикл регулирования.
Согласно одному из вариантов реализации, в алгоритме блока синхронизации производится квантование управляющих импульсов (E+ и E-) по времени с настроенной частотой дискретизации. Для уменьшения погрешности регулирования дискретизация времени привязывается к фронту возникновения управляющих импульсов (E+ и E-). При отсутствии управляющих импульсов (E+ и E-) квантование не производится.
На Фиг. 9 показан принцип квантования управляющих импульсов E+ и E- и изменения управляющих воздействий для трех исполнительных механизмов, участвующих в регулировании. В каждый период дискретизации времени анализируется наличие импульсов (E+ и E-) и состояние исполнительных механизмов: сигналы включен/выключен (PSU1_ON…PSUn_ON), есть/нет блокировка работы (PSU1_BLOCK…PSUn_BLOCK), находится в автоматическом режиме или нет PSU1_AUTO…PSUn_AUTO), наличие/отсутствие команды на отключение (PSU1_STOP_CMD…PSUn_STOP_CMD). По фронту периода квантования выбирается исполнительный механизм. Критерий выбора может быть следующим: выбираемый механизм может отработать управляющее воздействие (включен, находится в автоматическом режиме, отсутствуют блокировка, и команда на отключение) и, при наличии сигнала «E+» - работает с минимальным текущим индивидуальным заданием (Z_PSU1…Z_PSUn), при наличии сигнала «E-» - работает с максимальным текущим индивидуальным заданием (Z_PSU1…Z_PSUn). Если исполнительный механизм не участвует в отработке задания, то его индивидуальное задание (Z_PSU1…Z_PSUn) приравнивается текущему актуальному значению скорости (Vп1…Vпn) питателя, и не рассматривается при выборке. В течение времени квантования управляющего импульса и при наличии импульса, вызвавшего это квантование, идет изменение задания выбранного исполнительного механизма. Если настал очередной период квантования, то процедура повторяется.
Блок синхронизации работает таким образом, что скорости выбранных для регулирования питателей приводятся к так называемым псевдо-синхронным значениям, что ведет с одной стороны к равномерному формированию пылеугольного факела по всему объему топочного пространства, с другой позволяют сделать процесс регулирования более устойчивым при изменении числа исполнительных механизмов. Согласно предлагаемому изобретению, процесс приведения скоростей вращения приводов питателей к указанным псевдо-синхронным значениям осуществляется путём изменения скорости только одного из питателей в каждый период дискретизации и в терминах настоящей заявки называется «синхронизацией». Так, при необходимости увеличения нагрузки скорость увеличивается у того ЧРП, у которого она наименьшая, а при необходимости уменьшения нагрузки скорость уменьшается у того ЧРП, у которого она наибольшая.
Однако, синхронизация скоростей не работает, если нагрузка стабилизирована и в управляющих воздействиях нет необходимости. Примером может стать моделирование переходного процесса, представленного на Фиг. 6: система с двумя включенными питателями не может выработать необходимое количество пара. Задание по производительности котла Z=185 т/ч, вырабатываемый расход пара при включенных на максимальную скорость двух питателях PV=156 т/ч. После отработки рассогласования, полностью загруженные питатели (Z_PSU_2 и Z_PSU_3) снизили скорость до 85%, включенный (Z_PSU_1), загрузился до 45% диапазона регулирования. Данная картина сохраняется до изменения задания. Представленный на Фиг. 6 переходный процесс - это модель идеальной системы. Реальная система отличается наличием нелинейностей и шумов сигналов.
На Фиг. 7 показан аналогичный Фиг. 6 процесс, но с зашумленным сигналом производительности котла и включенным алгоритмов динамической балансировки исполнительных механизмов. Z- Задание по производительности котла, PV - реальная производительность котла, Z_PSU_1 и Z_PSU_2 - скорость вращения двух включенных питателей. В начале питатели загружены на максимальную производительность, но это не даёт требуемый результат. В работу вводят третий питатель и подключают его к регулированию. Z_PSU_3 - скорость вращения подключенного питателя. В соответствии с сигналами ПИД-регулятора Z_PSU_3 начинает повышать свое значение, вследствие чего растёт и производительность котла. В определенный момент, исходя из поступающих сигналов, ПИД-регулятор для выхода на требуемую производительность без перерегулирования начинает вырабатывает сигналы для снижения производительности питателей. Z_PSU_1 и Z_PSU_2 уменьшают свои значения. К моменту, когда разница между реальной производительностью котла и заданной отработана (этап «Отработка рассогласования», ограниченный на Фиг. 7 левой вертикальной линией), два питателя загружены на 90%, один на 55% - такой режим работы не оптимален с точки зрения формирования факела и распределения выделяемой энергии по поверхностям нагрева в топке. Для выравнивания загруженности требуется снизить задание скорости вращения Z_PSU_1 и Z_PSU_2 и соответственно повысить Z_PSU_3. При этом важно обеспечить минимальное влияние на общую производительность котла, то есть чтобы изменение скорости питателей не влияло на количество производимого пара. Это, в частности, реализовано с применением алгоритма автоматической балансировки задания скорости питателей.
Этап «Автоматической балансировки» (средняя часть Фиг. 7, ограниченная двумя вертикальными линиями) завершается, когда достигнуто допустимое рассогласование заданий скорости исполнительных механизмов. Согласно некоторым вариантам реализации, значение допустимого рассогласования, как и другие параметры регулятора, может быть задано технологами во время режимной наладки котлоагрегата и лежит в диапазоне 4…7%. На графике Фиг. 7 представлен «идеальный» переходный процесс, когда требуемая производительность по пару зависит только от сжигания топлива и нет «возмущений» со стороны потребителя пара и неравномерности горения угольного факела. На практике при работе ТЭС внешние возмущения делают время динамической балансировки еще меньше и сводят задания всех питателей к +/- 1% за счёт того, что регулятор вырабатывает управляющие значения чаще из-за непостоянства процессов горения и потребления пара.
На Фиг. 8 показан график моделирования работы угольной котельной системы с регулятором согласно одному из вариантов реализации изобретения при перегрузке мельницы пылесистемы. Примером такого сценария может служить ситуация, когда сработала локальная операция по пылесистеме, например, перегрузка мельницы, вследствие чего произошло отключение питателя данной пылесистемы от регулирования и задание ему минимальной скорости.
В отличие от предыдущего описанного сценария, показанного на Фиг. 7, в данном случае другие начальные условия - задание скорости вращения питателя Z_PSU_3 принудительно уменьшается действием локальной операции и он отключается от регулирования тепловой нагрузки. Производительность (PV) котла падает, оставшиеся питатели загружаются полностью, увеличивая задание скоростей Z_PSU_1 и Z_PSU_2 вращения , но общая производительность котла при этом меньше требуемой. Через какое-то время действие локальной операции прекращается и отключённый ранее питатель снова подключается к регулятору, после чего возможен сценарий управления, показанный на Фиг. 7.
Таким образом, все приведенные примеры реализации объединены общей концепцией, сущность которой определена приведенной формулой изобретения.
Приведенные в описании примеры, а также их альтернативные признаки являются иллюстративными вариантами реализации настоящего изобретения и не призваны ограничивать объем защиты настоящего изобретения. Любые изменения или замены в объеме, определенном формулой настоящего изобретения, считаются включенными в объем защиты настоящего изобретения, определенный формулой изобретения.
Настоящее изобретение относится к области систем автоматизированного управления, в частности к модулю распределения управляющего воздействия на группу механизмов подачи топлива для регулятора тепловой нагрузки пылеугольного котла и к регулятору тепловой нагрузки пылеугольного котла, содержащего такой модуль. Модуль распределения управляющего воздействия на группу механизмов подачи топлива от регулятора тепловой нагрузки пылеугольного котла выполнен с возможностью выработки индивидуального управляющего воздействия для каждого механизма подачи топлива, выбора механизма подачи топлива и передачи ему индивидуального управляющего воздействия с частотой дискретизации таким образом, что в каждый период дискретизации управляющее воздействие передаётся только на один из механизмов подачи топлива указанной группы. Причём модуль распределения управляющего воздействия выполнен с возможностью осуществлять указанные выбор механизма подачи топлива и выработку индивидуального управляющего воздействия на основании ряда параметров системы управления. Изобретение позволяет обеспечить стабильную работу котла в переходных процессах. 2 н. и 4 з.п. ф-лы, 9 ил.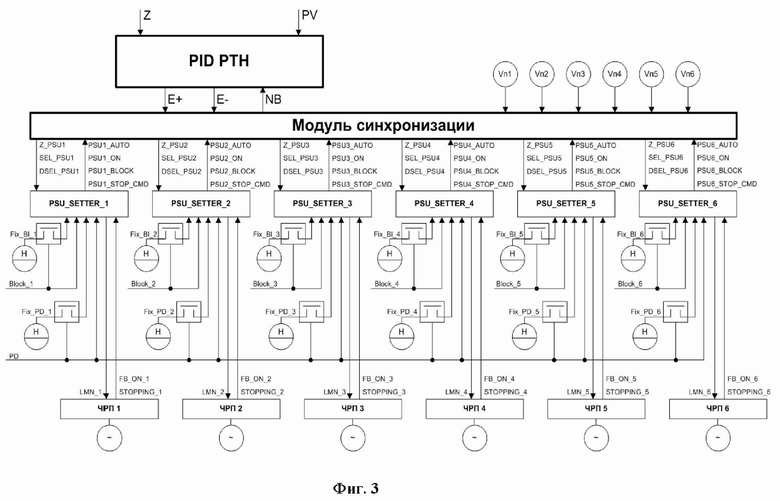
1. Модуль распределения управляющего воздействия на группу механизмов подачи топлива от регулятора тепловой нагрузки пылеугольного котла, выполненный с возможностью:
выработки индивидуального управляющего воздействия для каждого механизма подачи топлива, выбора механизма подачи топлива и передачи ему индивидуального управляющего воздействия с частотой дискретизации таким образом, что в каждый период дискретизации управляющее воздействие передаётся только на один из механизмов подачи топлива указанной группы;
причём модуль распределения управляющего воздействия выполнен с возможностью осуществлять указанные выбор механизма подачи топлива и выработку индивидуального управляющего воздействия на основании: сигналов (E+ и E-) увеличения или уменьшения производительности котла, сигналов (Vп1…Vпn) текущей скорости вращения двигателя каждого из механизмов подачи топлива, сигналов (PSU1_ON…PSUn_ON) включенного состояния каждого из механизмов подачи топлива, сигналов (PSU1_AUTO…PSUn_AUTO) автоматического режима каждого из механизмов подачи топлива, сигналов (PSU1_BLOCK…PSUn_BLOCK) блокировки работы каждого из механизмов подачи топлива, сигналов (PSU1_STOP_CMD…PSUn_STOP_CMD) останова каждого из механизмов подачи топлива.
2. Модуль по п. 1, в котором сигналы (E+ и E-) увеличения или уменьшения производительности котла формирует модуль пропорционально-интегрально-дифференцирующего (ПИД) регулятора, который связан с модулем распределения управляющего воздействия посредством дискретных сигналов управления (E+ и E-), сформированных методом широтно-импульсной модуляции.
3. Модуль по одному из пп. 1, 2, в котором модуль распределения управляющего воздействия на группу исполнительных механизмов подачи топлива выполнен с возможностью выработки сигналов (Z_PSU1…Z_PSUn) задания интенсивности подачи топлива и сигналов (SEL_PSU1…SEL_PSUn, DSEL_PSU1…DSEL_PSUn) выбора и отмены выбора механизма подачи топлива для регулирования тепловой нагрузки.
4. Модуль по п. 3, в котором при разности сигналов (Z_PSU1…Z_PSUn) задания интенсивности подачи топлива у участвующих в регулировании механизмов подачи топлива более заданного относительного порогового значения в модуле ПИД-регулятора используют ширину зоны нечувствительности с нулевым значением, а фильтрацию сигнала основной обратной ПИД связи при этом отключают.
5. Модуль по любому из пп. 1-4, в котором n-й исполнительный механизм подачи топлива автоматически исключается из отработки управляющего воздействия в случае наличия сигнала (PSUn_BLOCK) блокировки работы n-го механизма подачи топлива или сигнала (PSUn_STOP_CMD) останова n-го механизма подачи топлива.
6. Регулятор тепловой нагрузки пылеугольного котла, содержащий модуль распределения управляющего воздействия на группу механизмов подачи топлива по любому из пп. 1-5.
| KR 101778123 B1, 13.09.2017 | |||
| Система автоматического регулирования процесса горения котлоагрегата для сжигания твёрдого топлива в кипящем слое с горелкой жидкого топлива | 2018 |
|
RU2682787C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВЗАИМОСВЯЗАННЫХ ПРОЦЕССОВ НАГРУЗКИ ПРЯМОТОЧНОГО КОТЛА В УСЛОВИЯХ ТЕХНОЛОГИЧЕСКИХ ОГРАНИЧЕНИЙ | 2009 |
|
RU2416759C1 |

