Изобретение относится к области радиотехники и может быть использовано для обнаружения и идентификации меток на ПАВ на фоне отражающих объектов, в том числе от подстилающей поверхности.
Известен "Способ обнаружения и идентификации разыскиваемых транспондеров из множества пассивных транспондеров и система для осуществления способа" (Патент РФ №2336539, МПК G01S 13/75, опубл. 20.10.2008, Бюл. №1).
Данный способ предназначен для повышения надежности и достоверности обнаружения и идентификации одного из множества пассивных транспондеров. Способ обнаружения и идентификации включает передачу кодированного радиосигнала опроса, прием и оценку ответных радиосигналов пассивных транспондеров, принятие решения об обнаружении. Идентификационный код каждого транспондера отличается от кодов других транспондеров не менее чем в четырех знаках и имеет автокорреляционную функцию кнопочного типа. Радиосигнал опроса модулируют сигналом, инверсным коду разыскиваемого транспондера. Ответные сигналы сравнивают с пороговым уровнем. При вынесении решения подают команду к выполнению следующего цикла обнаружения.
Недостатком способа является то, что он не позволяет обнаруживать и идентифицировать метки на фоне отражающих объектов (земной или снежной поверхности, древесной растительности, зданий или сооружений).
Известен "Способ радиочастотной идентификации объектов и система для его реализации" (Патент РФ №N2661 288, МПК НО3Н 9/42, опубл. 30.08.2018, Бюл. №20) в котором осуществляют радиозондирование пассивной радиометки на ПАВ путем облучения гармоническим сигналом, кодирование опросных сигналов радиометкой на ПАВ путем фазовой модуляции элементарных символов, формирование радиометкой на ПАВ ответных сигналов, содержащих идентификационный код радиометки, и их переизлучение в сторону приемопередающего тракта, радиозондирование осуществляют пакетом радиоимпульсов, содержащим по меньшей мере одну пару импульсов, один из импульсов которой имеет несущую частоту fx, соответствующую центральной частоте полосы рабочих частот Δfx, в которой радиометка формирует первую часть идентификационного кода, а другой импульс имеет частоту f2, соответствующую центральной частоте полосы рабочих частот Δf2, в которой радиометка формирует вторую часть идентификационного кода. Временной интервал между импульсами должен составлять не менее tu=tз+tк+2tc, где tз - начальная задержка сигнала в радиометке; tк - длительность кодовой части ответного сигнала радиометки; tc - время распространения сигнала от приемопередающего тракта до радиометки. Порядок импульсов в паре задается случайным образом.
Недостатком способа является то, что он не позволяет идентифицировать метку на фоне отражающих объектов. Кроме того, если считывающее устройство установлено на подвижном носителе, tc является случайной величиной. Это нарушает алгоритм обработки сигнала в этом способе и не позволяет достоверно идентифицировать метку.
Наиболее близким по технической сущности к предлагаемому изобретению является "Способ идентификации объектов" (Патент РФ №2296304, МПК G01K 7/10, опубл. 27.03.2007, Бюл. №9).
Способ заключается в том, что при идентификации на объекте закрепляют пассивную пьезоэлектрическую радиометку с антенной. Затем осуществляют радиозондирование передатчиком пассивной радиометки. Радиозондирование осуществляют модулированным сигналом. Кодирование сигнала осуществляют подбором соответствия топологии встречно-штыревого преобразователя и отражающей структуры (ОС) пьезоэлектрической пассивной радиометки форме модулированного сигнала, излучаемого передатчиком. Сигнал, излученный передатчиком, преобразуется пьезоэлектрической пассивной меткой в ответный сигнал и переизлучается ею. Форме сигнала, излученного передатчиком, соответствует только одна топология радиометки. Сигнал, переизлученный меткой, принимается приемником и передается на устройство управления для различения сигналов, принятых приемником. На основании анализа в блоке управления делается вывод об идентификации объекта или об его отсутствии.
Недостатком этого известного способа так же является невозможность идентификации опрошенной метки при наличии мешающих отражений. При облучении метки считывающим устройством, падающий на метку опросный радиоимпульс является суперпозицией как прямого сигнала, так и сигналов, переотраженных от близлежащих отражающих объектов. Отклик метки содержит сумму откликов на каждую из компонент данной смеси. Сигнал, принимаемый считывающим устройством, содержит как сигнал прямого отражения запросного импульса от отражающих объектов, так и переизлученный меткой сложный сигнал, вернувшийся в считыватель по многолучевому каналу. Это приводит к невозможности различения полезного сигнала, переотраженного меткой, от случайного сигнала, переотраженного меткой вместе с отражающими объектами.
Задачей изобретения является разработка способа, позволяющего увеличить вероятность обнаружения сигнала от метки на фоне отражающих объектов.
Техническим результатом является повышение надежности и достоверности обнаружения и идентификации метки на ПАВ на фоне отражающих объектов.
Технический результат достигается тем, что в способе обнаружения и идентификации меток на ПАВ на фоне отражающих объектов, предусматривают закрепление на объекте пьезоэлектрической пассивной радиометки, в которой возбуждают, распространяют, отражают акустические поверхностные волны, проводят модуляцию сигнала, радиозондирование метки этим сигналом, его прием после переизлучения меткой, передачу принятого сигнала на обработку, после чего принимают решение об обнаружении сигнала, причем, радиозондирование метки вначале осуществляют последовательно на пронумерованном ряде разных частот, различающихся на определенную величину, в диапазоне частот, расставленных в этой последовательности, переизлученные меткой и отражающими объектами, принятые на этих частотах сигналы обрабатывают, записывают в память их средние значения, затем в следующем временном интервале системы радиозондирование осуществляют на других рабочих частотах из того же диапазона, определенных на тех же номерах последовательности, принятые на этих частотах сигналы обрабатывают и так же записывают в память их средние значения, средние значения принятых и обработанных отраженных сигналов на одноименных номерах последовательности вычитают из величин, записанных в памяти на предыдущем временном интервале работы на этих номерах частоты, причем увеличение абсолютной величины разности средних значений сигналов, принятых в соседних временных интервалах работы, осуществляют накоплением указанной разности за несколько циклов работы системы, обнаруживают и обрабатывают накопленные сигналы, после чего делают вывод о распознавании сигнала метки на фоне отражающих объектов.
Технический результат достигается за счет введения новых существенных признаков, заключающихся в том, что радиозондирование метки осуществляют последовательно на пронумерованном ряде разных частот в двух соседних временных интервалах. В каждом временном интервале осуществляют прием отраженных сигналов и накопление их средних значений. Затем вычисляют разность средних значений, накопленных в каждом из двух соседних интервалов, и принимают решение об обнаружении и идентификации меток. Для повышения вероятности обнаружения и идентификации меток накопление разности проводят за несколько циклов работы системы.
Сущность изобретения поясняется чертежами, где:
на фиг. 1 - функциональная схема устройства для реализации предлагаемого способа;
на фиг. 2 - схема пассивной радиометки;
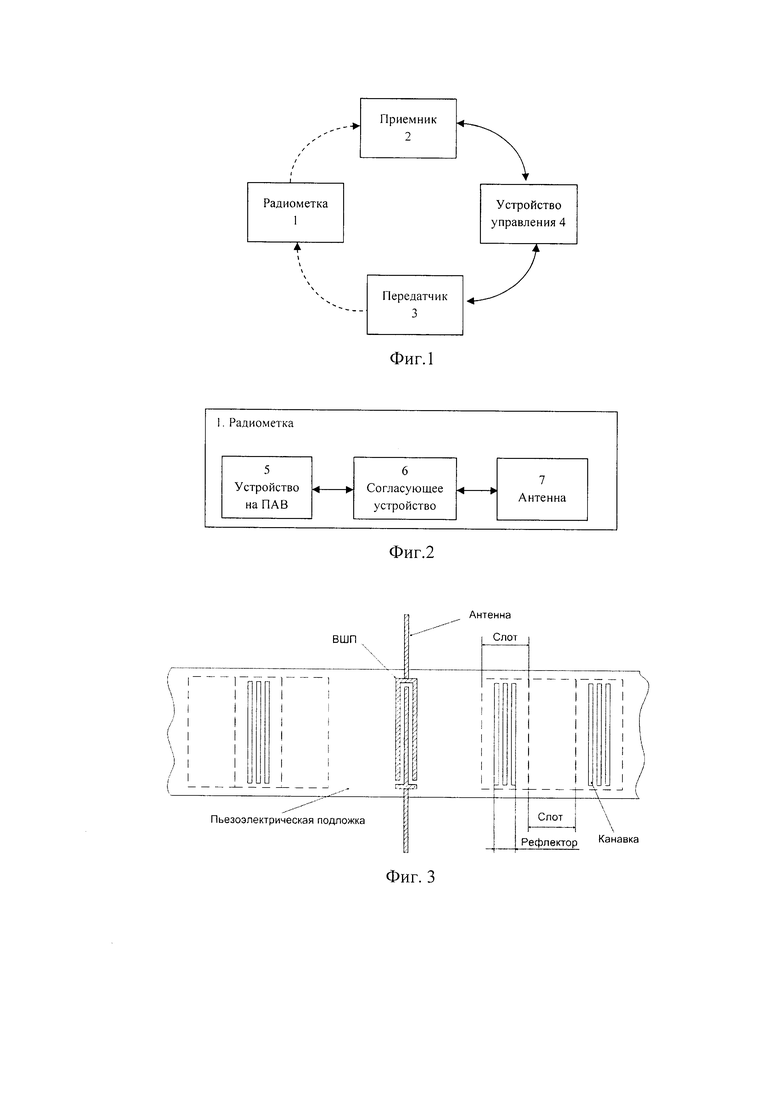
на фиг. 3-внешний вид пассивной радиометки;
на фиг. 4 - топология ПАВ устройства;
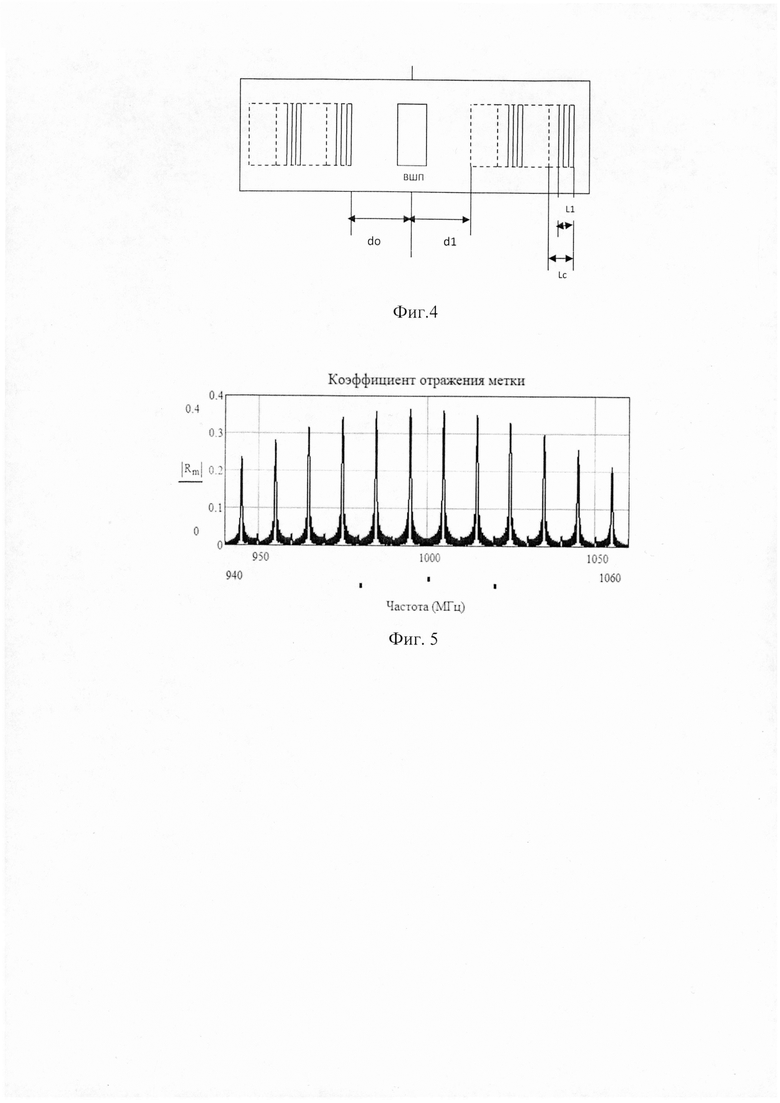
на фиг. 5 - модуль коэффициента отражения пассивной радиометки.
На примере следующих параметров df=0.25λ0. Lc=100, Ll=10. (Lc - длина слота в длинах волн, Ll - длина секции - рефлектора в длинах волн). f0 - 1000 МГц. Расстояние между спектральными полосами 10 МГц.
Устройство, реализующее предлагаемый способ, используется, например, в системах радиочастотной идентификации [1] и состоит из пассивной радиометки 1, приемника 2, передатчика 3 и блока управления 4. Пассивная радиометка 1 соединена с приемником 2 и передатчиком 3 посредством радиосигналов. Приемник 2, передатчик 3 и блок управления 4 соединены между собой.
Пассивная радиометка 1 состоит из последовательно соединенных между собой устройства на ПАВ 5, согласующего устройства 6 и антенны 7.
Устройство на ПАВ (фиг. 3) реализуется в виде металлизированного встречно-штыревого преобразователя (ВШП) и отражательных канавок, нанесенных на подложку из пьезоэлектрического материала. Для радиометки используется топология, описанная в патенте [2]. Расстояния между ВШП и канавками (см. фиг. 4) выбираются из условия df=d0-d1=λ/4 (где d0 - расстояние от ВШП до первого левого рефлектора, a d1 - расстояние от ВШП до первого правого рефлектора). Модуль коэффициента отражения |Rm| метки показан на фиг. 5. В диапазоне частот |Rm| представляет собой гребенку частот, достигая ряда максимумов и минимумов. Частоты, на которых |Rm| максимален, назовем рабочими частотами. На средней частоте диапазона f0-|Rm| равен 0. Расстояние между рабочими частотами определяется топологией метки. Если передатчик 3 излучает прямоугольные р/импульсы с несущими частотами, совпадающими с рабочими частотами "гребенки" |Rm| метки, то устройство на ПАВ 5 переизлучает импульсы на любой из этих частот. Если несущие частоты облучающих р/импульсов определяются частотами, лежащими по середине между "всплесками" |Rm|, метка не переизлучает опросный сигнал. Согласующее устройство 6 реализуется в виде дополнительных индуктивностей [3]. Антенна 7 может быть реализована в виде четвертьволнового вибратора [4]. Приемник 2 и передатчик 3 являются устройствами, применяющими технологию многолучевых антенных решеток (MAP) [5]. Антенна передатчика может одновременно формировать несколько узких лучей в своей диаграмме направленности. Диаграммобразующее устройство управления (ДОУ) обеспечивает возможность передатчику периодически излучать р/импульсы на разных рабочих частотах в каждом луче многолучевой антенной решетки. Блок управления 4 может быть реализован на основе последовательной матрицы Бласса, микропроцессора и программного обеспечения [5, 6, 7].
Способ распознавания объекта на фоне отражающих объектов можно описать следующим образом. Блок управления 4 формирует периодические последовательности радиоимпульсов, согласованные со структурой устройства на ПАВ - 5, и передает эту информацию на передатчик - 3. Две последовательно формируемые последовательности образуют один цикл работы. Передатчик 3 излучает сформированные блоком управления 4 сигналы в эфир.
В первой половине цикла работы системы рабочие частоты излучаемой последовательности радиоимпульсов определяются частотами максимумов "гребенки" |Rm| метки (см. фиг. 5). Количество импульсов в последовательности и шаг перестройки по частоте определяются возможностями топологии метки и техническими возможностями MAP. На этом этапе метка переизлучает как сигналы передатчика, так и сигналы, переотраженные меткой от отражающих объектов. В этом временном интервале работы системы приемник 2 стробируется на время равное tз, определяемое задержкой при распространении акустического импульса, возбуждаемого в подложке метки.
Частоты радиоимпульсов в последовательности, излучаемых во второй половине цикла работы, определяются частотами минимумов "гребенки" |Rm| метки. Количество импульсов в этой последовательности равняется количеству импульсов в последовательности в первой части цикла. На этом этапе излучаемые сигналы отражаются только отражающими объектами. Время стробирования приемника определяется расстоянием от передатчика до облучаемых объектов. Сигнал, излученный передатчиком 3, поступает на антенну 7 радиометки 1. С антенны 7, через согласующее устройство 6, сигнал поступает на устройство на ПАВ - 5. Основной функцией устройства на ПАВ 5 является формирование ответного сигнала. Далее сигнал через согласующее устройство 6 и антенну 7 излучается в эфир и поступает на приемник 2. Передатчик ридера работает в когерентном режиме, поэтому сигнал, прямо переотраженный меткой, является когерентным радиоимпульсом. Сигнал, переотраженный меткой от отражающих объектов, носит случайный характер. Метка одновременно переизлучает прямой сигнал передатчика и сигнал, отраженный окружающими объектами. Оба сигнала задерживаются на время tз. Сигнал, переотраженный меткой от отражающих объектов, накладывается на прямо отраженный сигнал, "маскируя" его. Интенсивность прямо отраженного меткой сигнала зависит от эффективной отражающей поверхности ее антенны - σэф. мет. Интенсивность сигнала, переотраженного меткой от отражающих объектов, зависит от эффективной отражающей поверхности этих объектов - σэф. объект, определяемой лучом диаграммы направленности антенны передатчика. σэф. объект>σэф. мет, поэтому сигнал, переотраженный меткой от отражающих объектов, больше сигнала прямо переотраженного меткой. Этот сигнал, вместе с шумами приемника ридера, образует некий "фон", ухудшая соотношение сигнал /шум при приеме. Для увеличения вероятности обнаружения полезного сигнала, производят накопление средних значений отраженных сигналов за несколько циклов работы устройства.
Однако, случайные сигналы "фона", при последовательном облучении отражающих объектов, являются сильно коррелированными. Для повышения эффективности процесса накопления производится декорреляция "фоновых" сигналов.
Система MAP в разных циклах работы системы облучает разные участки отражающих объектов на разных частотах. Это ослабляет корреляцию, в разных временных интервалах работы, случайных сигналов, переотраженных меткой от отражающих объектов, и случайных сигналов, отраженных объектами. Обработка (накопление) отраженных сигналов производится в блоке управления 4. В первой части цикла вычисляются средние значения всех отраженных импульсов последовательности и вычисляется их среднее значение за этот интервал - М1ср. 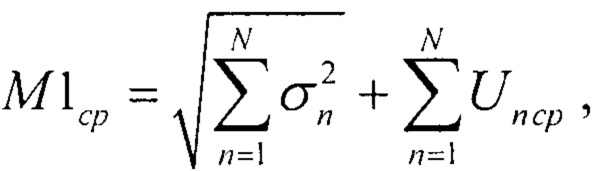 где σ2 дисперсия n-го среднего значения переотраженного от отражающих объектов сигнала в последовательности - mп.переотр (t), Uпср - среднее значение импульса, переотраженного меткой, N - число импульсов в последовательности.
где σ2 дисперсия n-го среднего значения переотраженного от отражающих объектов сигнала в последовательности - mп.переотр (t), Uпср - среднее значение импульса, переотраженного меткой, N - число импульсов в последовательности.
Среднее значение М2ср отраженных сигналов последовательности во второй части цикла равно 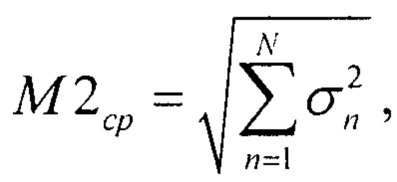 где σ2 дисперсия n-го среднего значения импульса в последовательности, отраженного от отражающих объектов - mп.объект (t), N - число импульсов в последовательности.
где σ2 дисперсия n-го среднего значения импульса в последовательности, отраженного от отражающих объектов - mп.объект (t), N - число импульсов в последовательности.
В блоке управления 4 осуществляется операция M1ср - k⋅М2cр, где k - нормировочный коэффициент. Так как статистические характеристики сигналов, отраженного от отражающих объектов и переотраженного меткой от объектов, идентичны, то вычитание компоненты k⋅М2cр из общей суммы сигналов переотраженных меткой, позволит при накоплении увеличить сигнал, переотраженный меткой, и выделить его из смеси сигнал + фон.
Предлагаемый способ обнаружения и идентификации сигнала метки на фоне отражающих объектов позволяет увеличить надежность и достоверность идентификации объекта на фоне мешающих отражений. Надежность идентификации метки увеличивается за счет увеличения отношения сигнал-фон, которое обеспечивается увеличением амплитуды полезного, переизлученного меткой, сигнала на выходе устройства управления.
Источники информации, принятые во внимание:
1. Акустоэлектронные устройства обработки и генерации сигналов. Принципы работы, расчета и проектирования / О.Л. Балышева и др. Монография / Под ред. акад. Гуляева. - М: Радиотехника, 2012, 576 с.
2. Патент RU 2457450 С1 Чувствительный элемент для измерения механических напряжений. Богословский С.В., Сапожников Г.А. и др.
3. Патент RU 2176092 С1. Маркерное устройство для системы радиочастотной идентификации. Васильченко И.Н., Егорова О.Г. и др.
4. Воскресенский Д.И. Антенны с обработкой сигнала: Учебное пособие для вузов. - М.: САЙНС-ПРЕСС, 2002.
5. Антенны и устройства СВЧ. Проектирование фазированных антенных решеток: Учеб. Пособие для вузов / B.C. Филиппов и др.; под ред. Д.И. Воскресенского. - М.: Радио и связь, 1994, 592 с.
6. Гусев В.Г. Электроника и микропроцессорная техника: учебник для вузов / В.Г. Гусев, Ю.М. Гусев. 3-е изд., перераб. и доп. - М.: Высшая школа, 2005.
7. Л. Рабинер, Б. Гоулд. Теория и применение цифровой обработки сигналов. - М.: Мир, 1978, 848 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2005 |
|
RU2296304C1 |
| СПОСОБ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2661288C1 |
| СПОСОБ АНТИКОЛЛИЗИОННОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634308C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАЗЫСКИВАЕМЫХ ТРАНСПОНДЕРОВ ИЗ МНОЖЕСТВА ПАССИВНЫХ ТРАНСПОНДЕРОВ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2006 |
|
RU2336539C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2057334C1 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТА В ИЗОБРАЖЕНИИ И ТРАНСПОНДЕР | 2013 |
|
RU2656576C2 |
| РАДИОМЕТКА ДЛЯ СИСТЕМ ИДЕНТИФИКАЦИИ НА ОСНОВЕ ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛН | 2015 |
|
RU2579522C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ОБЪЕКТОВ В СТАЦИОНАРНЫХ ХРАНИЛИЩАХ | 2012 |
|
RU2495489C1 |
| Энергонезависимый транспондер | 2017 |
|
RU2669203C1 |
Изобретение относится к области радиотехники и может быть использовано для обнаружения и идентификации меток на ПАВ на фоне отражающих объектов, в том числе от подстилающей поверхности. Техническим результатом является повышение надежности и достоверности обнаружения и идентификации метки на ПАВ на фоне отражающих объектов. В заявленном способе радиозондирование метки осуществляют последовательно на пронумерованном ряде разных частот в двух соседних временных интервалах. В каждом временном интервале осуществляют прием отраженных сигналов и накопление их средних значений. Затем вычисляют разность средних значений, накопленных в каждом из двух соседних интервалов, и принимают решение об обнаружении и идентификации меток. Для повышения вероятности обнаружения и идентификации меток накопление разности проводят за несколько циклов работы системы. 5 ил.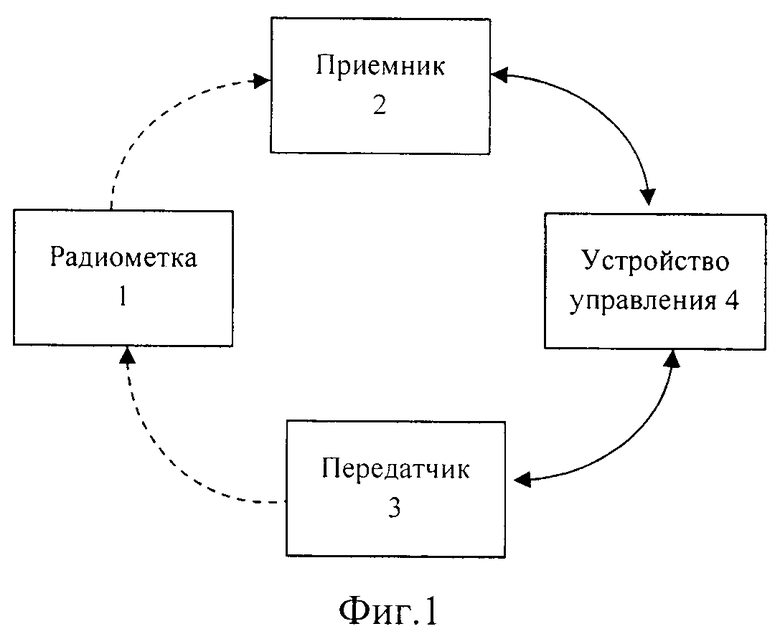
Способ обнаружения и идентификации меток на ПАВ на фоне отражающих объектов, предусматривающий закрепление на объекте пьезоэлектрической пассивной радиометки, в которой возбуждают, распространяют, отражают акустические поверхностные волны, проводят модуляцию сигнала, радиозондирование метки этим сигналом, его прием после переизлучения меткой, передачу принятого сигнала на обработку, после чего принимают решение об обнаружении сигнала, отличающийся тем, что радиозондирование метки вначале осуществляют последовательно на пронумерованном ряде разных частот, различающихся на определенную величину, в диапазоне частот, расставленных в этой последовательности, переизлученные меткой и отражающими объектами принятые на этих частотах сигналы обрабатывают, записывают в память их средние значения, затем в следующем временном интервале работы системы радиозондирование осуществляют на других рабочих частотах из того же диапазона, определенных на тех же номерах последовательности, принятые на этих частотах сигналы обрабатывают и так же записывают в память их средние значения, средние значения принятых и обработанных отраженных сигналов на одноименных номерах последовательности вычитают из величин, записанных в памяти на предыдущем временном интервале работы на этих номерах частоты, причем увеличение абсолютной величины разности средних значений сигналов, принятых в соседних временных интервалах работы, осуществляют накоплением указанной разности за несколько циклов работы системы, обнаруживают и обрабатывают накопленные сигналы, после чего делают вывод о распознавании сигнала метки на фоне отражающих объектов.
| СПОСОБ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2661288C1 |
| СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2010 |
|
RU2422848C1 |
| СПОСОБ АНТИКОЛЛИЗИОННОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634308C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ РАЗЫСКИВАЕМЫХ ТРАНСПОНДЕРОВ ИЗ МНОЖЕСТВА ПАССИВНЫХ ТРАНСПОНДЕРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497147C2 |
| СИСТЕМА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ | 2006 |
|
RU2344437C2 |
| СПОСОБ ОБРАБОТКИ ИМПУЛЬСНОГО КОДИРОВАННОГО ИНФОРМАЦИОННОГО СИГНАЛА | 2014 |
|
RU2576503C2 |
| KR 20090041142 A, 28.04.2009 | |||
| WO 2016057210 A1, 14.04.2016 | |||
| US 6708881 B2, 23.03.2004 | |||
| KR 20100060168 A, 07.06.2010 | |||
| US 2009179740 A1, 16.07.2009. | |||

