Ссылки на родственные заявки
[0001] В настоящей заявке испрашивается приоритет по заявке PCT/US 2015/057397, поданной 26 октября 2015 под названием "ПЛАВУЧАЯ СТРУКТУРА", в которой испрашивается приоритет по заявке на патент США № 14/524,992, поданной 27 октября 2014 под названием "ПЛАВУЧАЯ СТРУКТУРА", в настоящее время аннулированной, которая являлась заявкой в частичное продолжение Заявки на патент США № 14/105,321, поданной 13 декабря 2013 под названием "ПЛАВУЧАЯ СТРУКТУРА", по которой был выдан патент США № 8,869,727 от 28 октября 2013, которая является заявкой в частичное продолжение заявки на патент США № 13/369,600, поданной 09 февраля 2012 под названием "СТАБИЛЬНЫЙ МОРСКОЙ ПЛАВУЧИЙ СКЛАД", по которой был выдан патент США № 8,662,000 от 04 марта 2014, которая является заявкой в частичное продолжение заявки на патент США № 12/914,709, поданной 28 октября 2010, и по которой выдан патент США № 8,251,003 от 28 августа 1012, в которой испрашивается приоритет по предварительной заявке на патент США № 61/259,201, поданной 18 ноября 2009 и по предварительной заявке на патент США № 61/521,701, срок действия которых истек. Вся эти документы полностью включены в настоящее описание.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение по существу относится к плавучей вертикальной непрерывной структуре для погрузки, разгрузки, подъема и спуска труб для морских операций по добыче нефти и газа.
Предпосылки к созданию изобретения
[0003] Существует потребность в плавучей вертикальной непрерывной структуре для погрузки, разгрузки, подъема и спуска труб.
[0004] Далее, существует потребность в плавучей вертикальной непрерывной структуре для погрузки, разгрузки, подъема и спуска труб, обеспечивающей гашение волн.
[0005] Настоящее изобретение удовлетворяет эти потребности.
Краткое описание чертежей
[0006] Далее следует подробное описание изобретения со ссылками на приложенные чертежи, где:
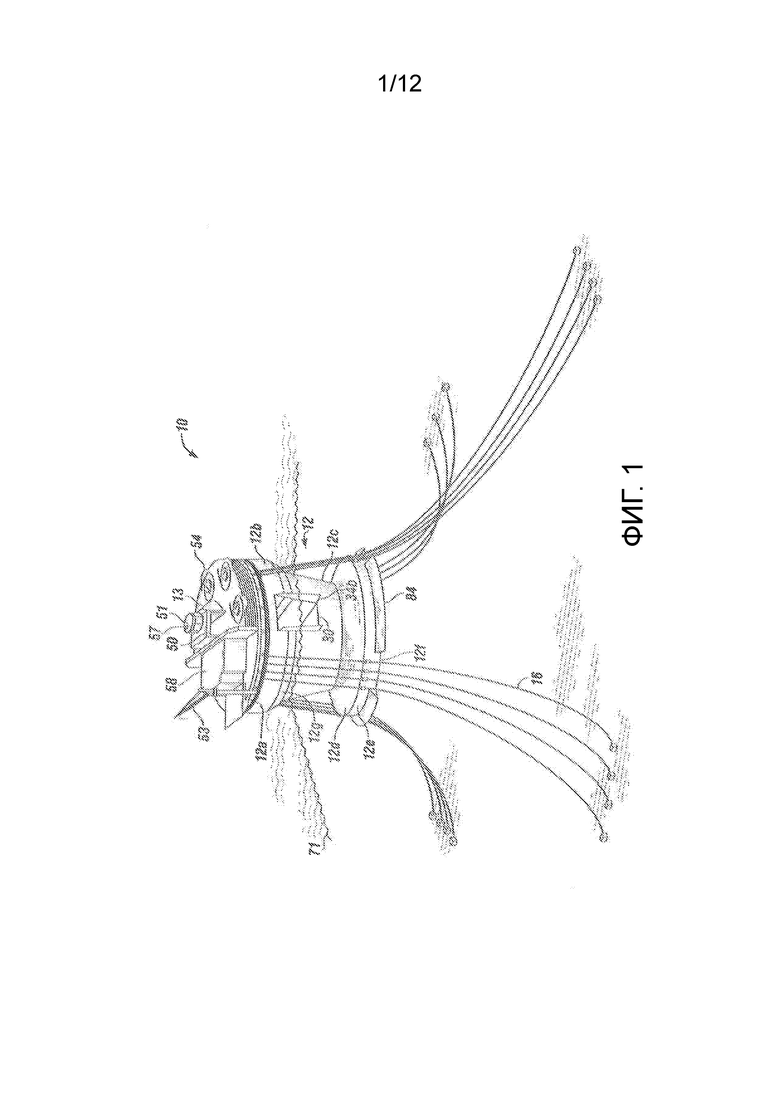
[0007] Фиг. 1 - вид в перспективе плавучей вертикальной непрерывной структуре для погрузки, разгрузки, подъема и спуска труб.
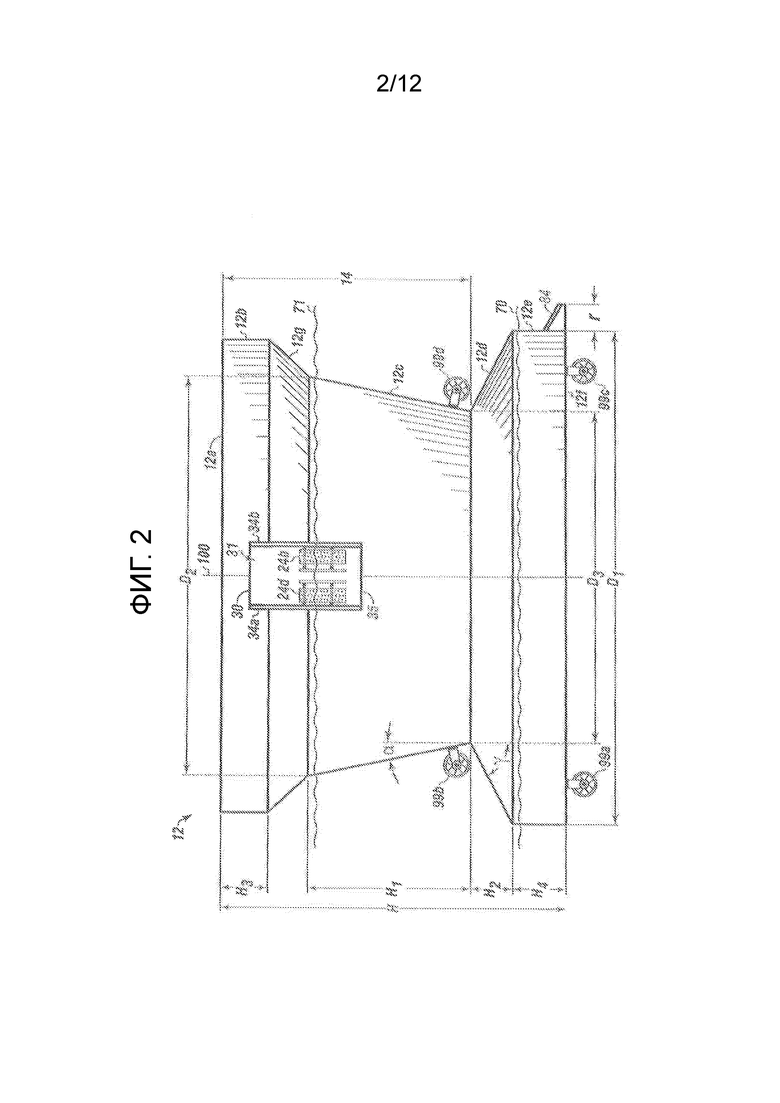
[0008] Фиг. 2 - вертикальный профиль корпуса плавучей непрерывной вертикальной структуры для погрузки, разгрузки, подъема и спуска труб.
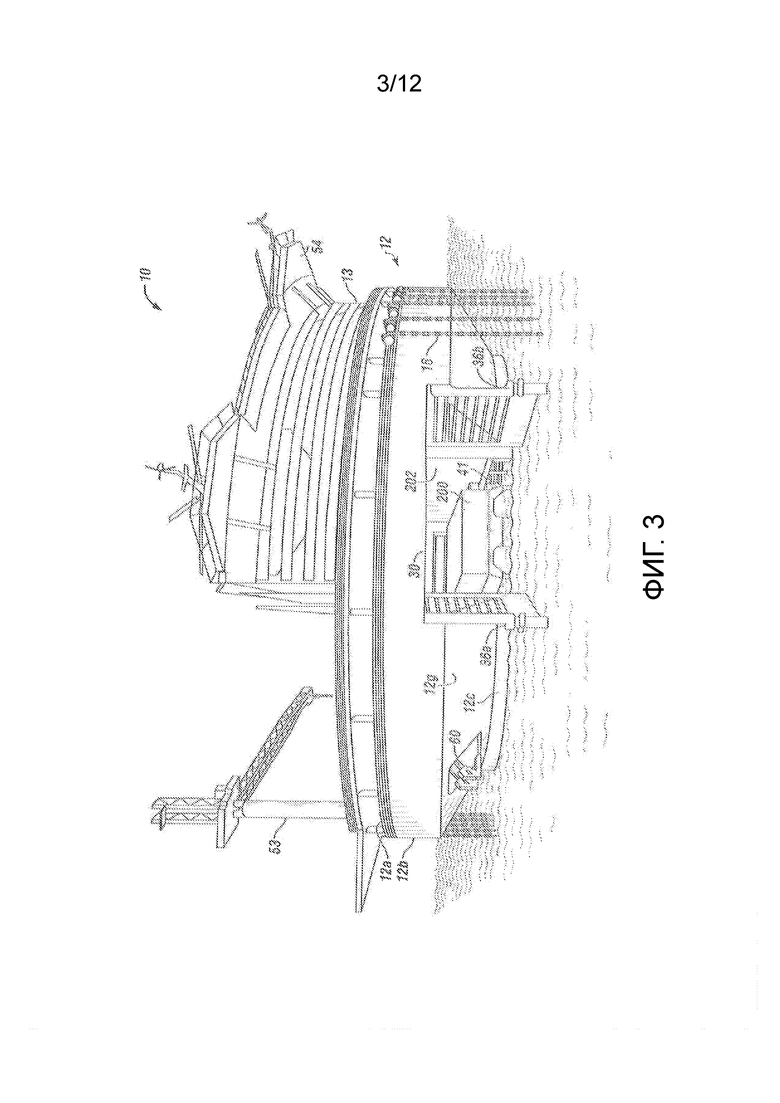
[0009] Фиг. 3 - вид в перспективе плавучей вертикальной непрерывной структуры для погрузки, разгрузки, подъема и спуска труб в увеличенном масштабе при оперативной осадке.
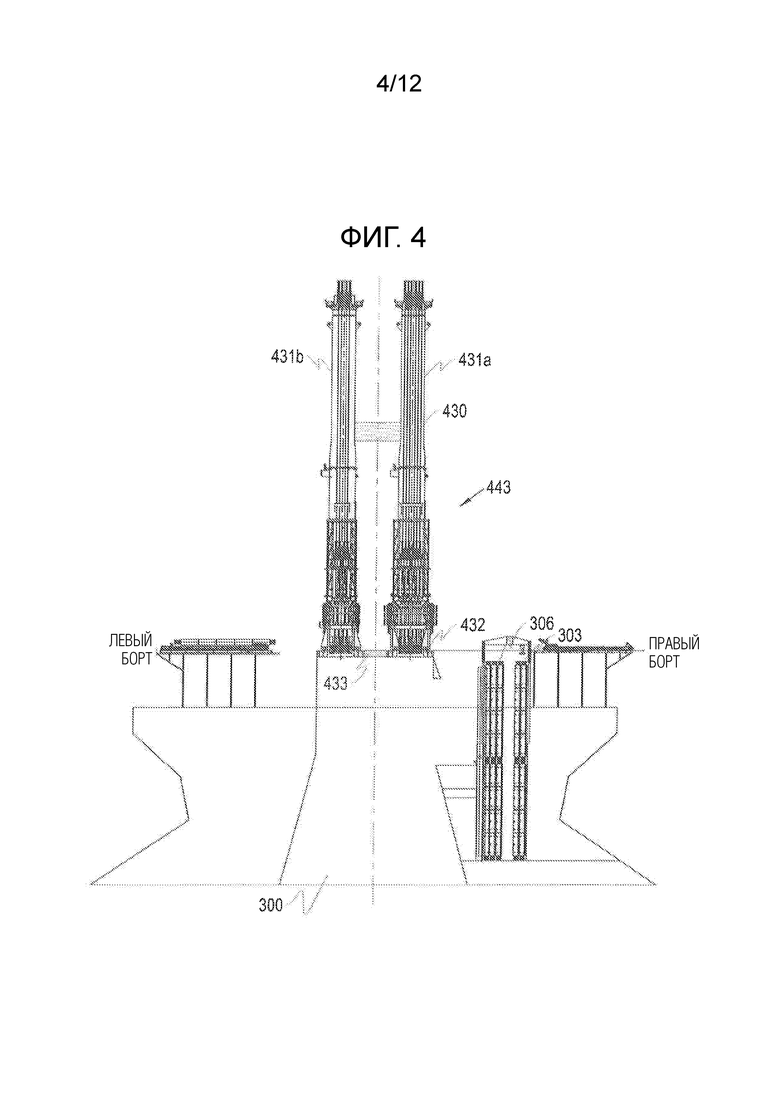
[0010] Фиг. 4 - вид сбоку конфигурации с двумя вышками плавучей непрерывной вертикальной структуры для погрузки, разгрузки, подъема и спуска труб
[0011] Фиг. 5 - вид сверху плавучей непрерывной вертикальной структуры для погрузки, разгрузки, подъема и спуска труб.
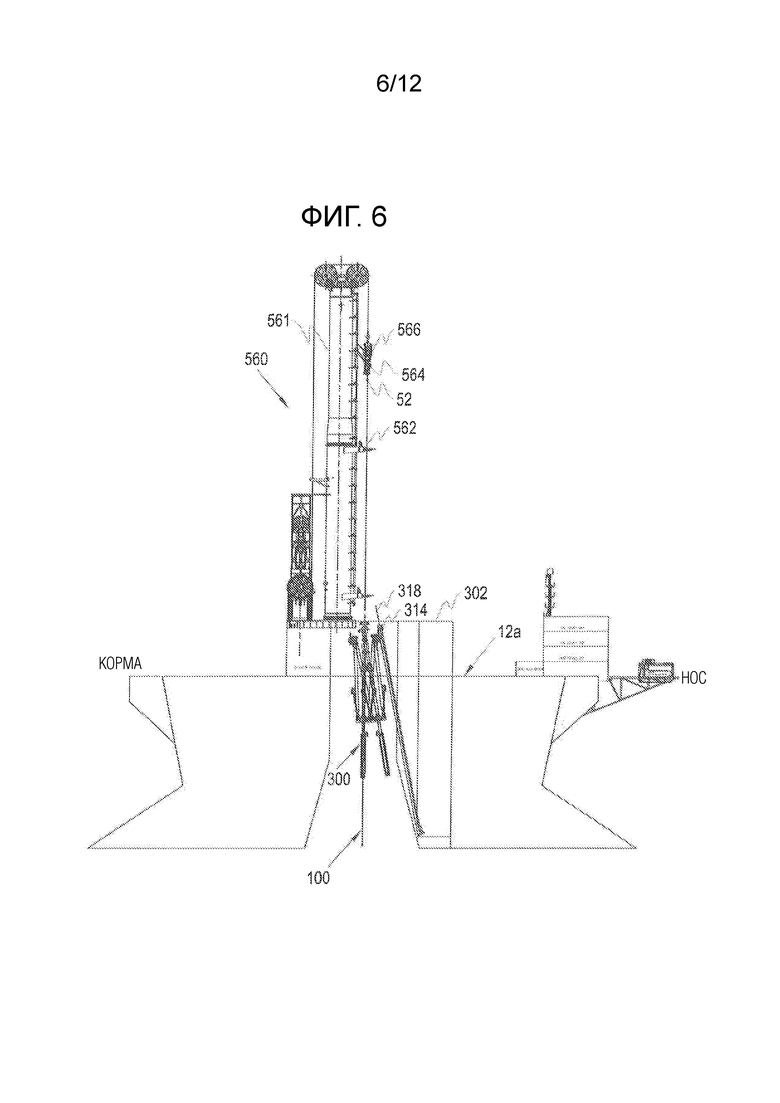
[0012] Фиг. 6 - детализированный вид третьей вышки для буровых труб.
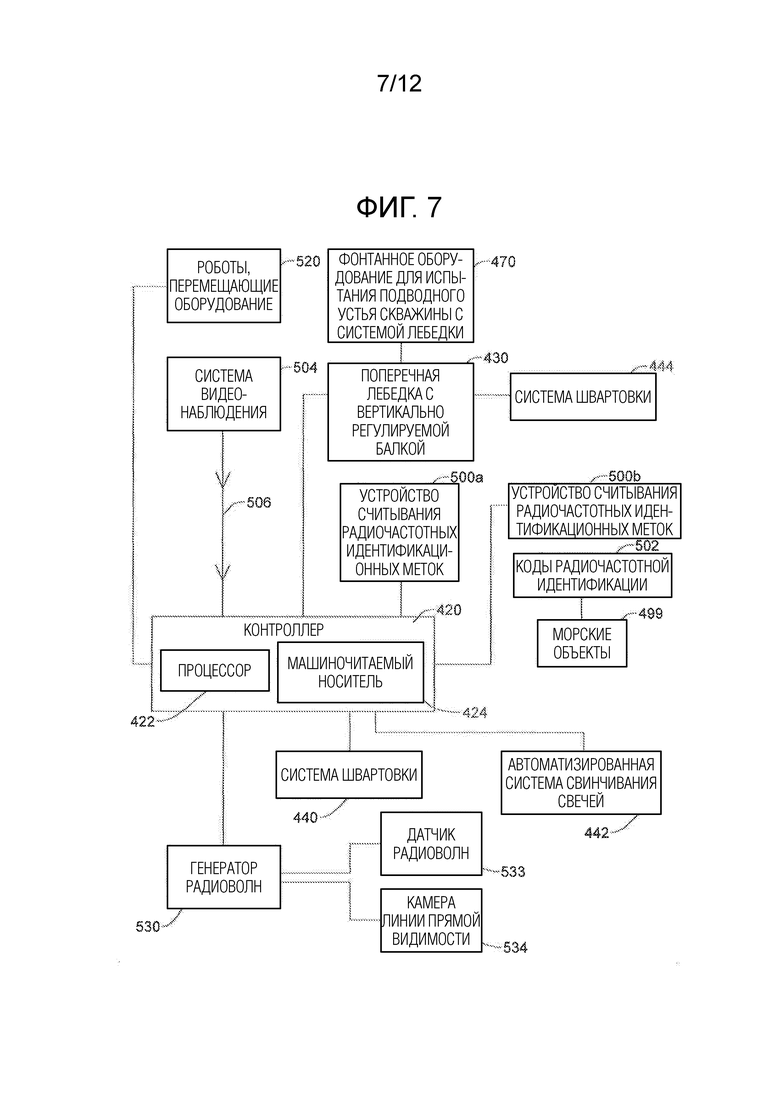
[0013] Фиг. 7 - схема компонентов плавучей структуры, соединенных с контроллером.
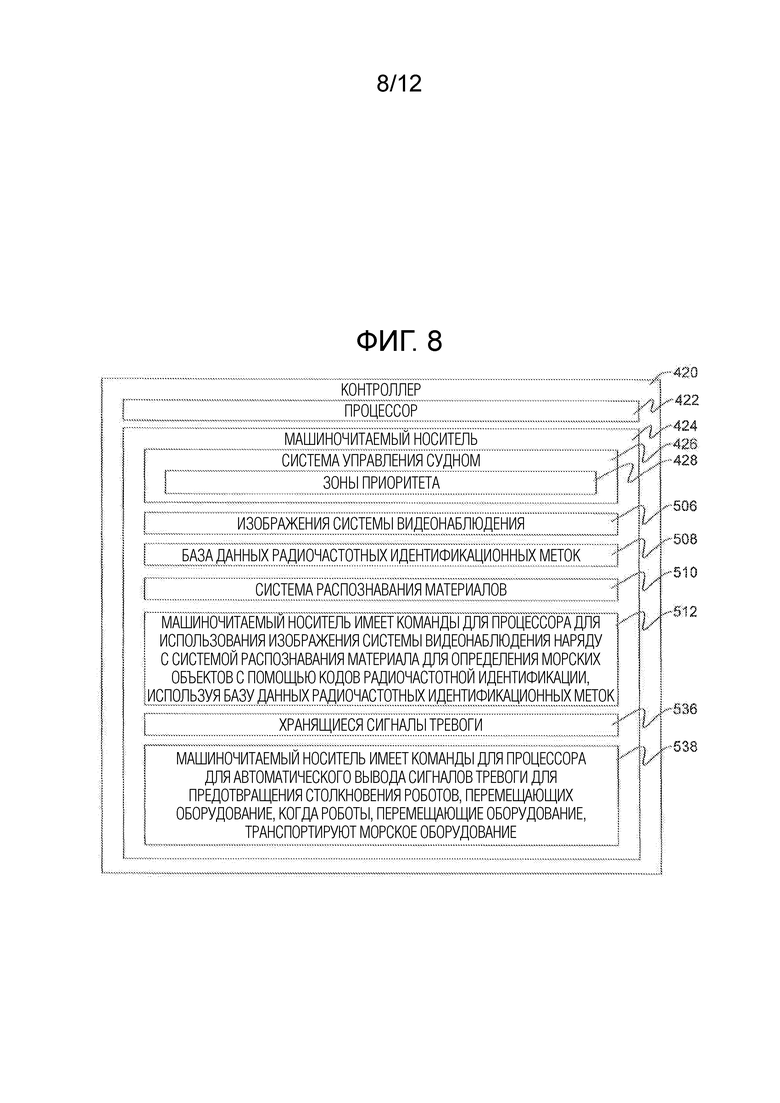
[0014] Фиг. 8 - схема контроллера по настоящему изобретению.
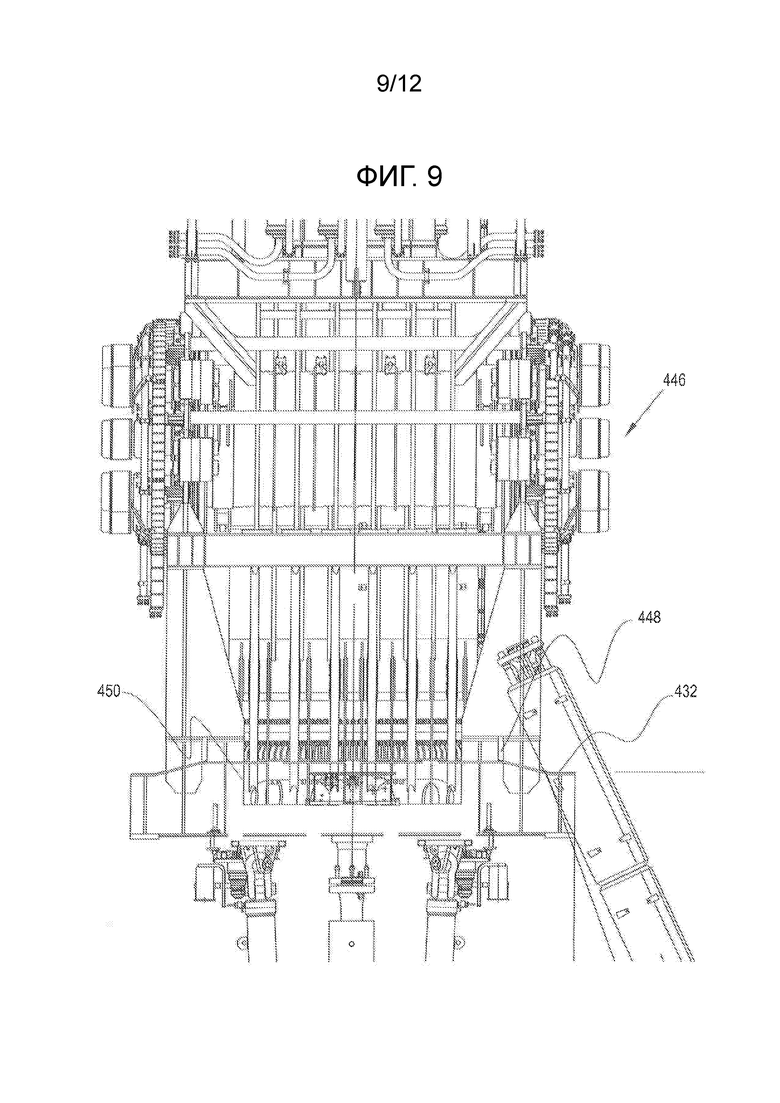
[0015] Фиг. 9 - деталь динамической поперечной поддерживающей балки с системой подводного развертывания.
[0016] Фиг. 10 - деталь автоматизированной системы подачи буровых труб в вышку.
[0017] Фиг. 11 - вид сбоку плавучей вертикальной непрерывной структуры для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной, которая может быть цилиндрической.
[0018] Фиг. 12 - детализированный вид плавучей вертикальной непрерывной структуры для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной.
[0019] Фиг. 13 - вид с вырезом плавучей вертикальной непрерывной структуры для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной в транспортной конфигурации.
[0020] Фиг. 14 - вид с вырезом плавучей вертикальной непрерывной структуры для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной в рабочей конфигурации
[0021] Настоящее изобретение подробно описано ниже со ссылками на перечисленные чертежи.
Подробное описание вариантов осуществления изобретения
[0022] Прежде чем перейти к подробному описанию предлагаемого устройства, следует понимать, что это устройство не ограничивается конкретными вариантами и может быть реализовано разными способами.
[0023] Варианты настоящего изобретения относятся к плавучей вертикальной непрерывной структуре для погрузки, разгрузки, подъема и спуска труб для поддержки морских операция по добыче нефти и газа.
[0024] Настоящее изобретение предотвращает травмы персонала со стороны оборудования благодаря наличию установленных в корпусе морских райзеров, установленных в корпусе свечей обсадных труб, и установленных в корпусе свечей буровых труб для уже свинченных райзеров, обсадных и буровых труб для сокращения времени свинчивания на палубе при сильном волнении моря.
[0025] Настоящее изобретение защищает работников на палубе, от сильного волнения моря, обеспечивая улучшенную стабильностью
[0026] Настоящее изобретение позволяет буксировать морскую платформу к месту морских катастроф и использовать ее как командный центр для борьбы с последствиями катастрофы, как госпиталь или центр сортировки пострадавших.
[0027] В настоящем описании используются следующие термины:
[0028] Термин "система крепления" относится к устройству, которое позволяет крепить буровое оборудование к вышке, например, магазин для свечей.
[0029] Термин "роботы для перемещения оборудования" относится к автоматизированным отслеживаемым устройствам, которые способны поднимать и доставлять оборудование из одного места на плавучей структуре в другое. Отслеживаемые устройства могут перемещаться по рельсам или балкам от одного склада к конечному пункту. Роботы имеют процессоры и машиночитаемые носители, на которых хранится информация о местоположениях зоны оборудования на плавучей структуре. Роботы для перемещения оборудования могут содержать устройства для считывания меток радиочастотной идентификации, соединенные с процессором для точного определения положения оборудования, например, в пределах 2 дюймов (50,8 мм).
[0030] Термин "морские объекты" в настоящем описании означает морские трубы, морские химикаты и морское оборудование.
[0031] Термин "система распознавания материала" относится к камере и базе данных, которые выполняют распознавание материала, подобно системе распознавания лиц. Например, система распознавания материала может сканировать трехмерную трубу и сравнивать эту трубу с заранее загруженным изображением подобной трубы или сравнивать точки данных, идентифицирующие изображение как трубу.
[0032] Термин "зона приоритета" в настоящем описании относится к карте пола буровой установки или главной палубы и к положениям на или между главной палубой и эллипсоидным килем, которые закодированы на основе опасности компонентов оборудования или материалов и имеют конкретное географическое положение на плавучей структуре. Например, одна зона может быть зоной приоритета "А", поскольку зона "А" содержит только материалы, имеющие летучие органические компоненты, а зона приоритета "Z" содержит только трубы, не являющиеся взрывоопасными.
[0033] Термин "крутильная машина" относится к железному трубному ключу, такому как машинный ключ.
[0034] Термин "база данных радиочастотной идентификации" относится к базе данных на машиночитаемом носителе, которая содержит наименование детали, данные о производителе, дату изготовления, серийный номер, зону приоритета и дату установки по наименованию детали, историю ремонта по наименованию детали и последовательности установки и соединения для безопасной и непрерывной эксплуатации. Например, база данных радиочастотной идентификации может содержать такие данные, как двустворчатый клапан, изготовлен AAA Valve Company, изготовлен 22 марта 2-17, серийный номер 234,432. Имеющий зону приоритета С, дата установки 11 мая 2017, для работы в условиях грязевого потока с давление 300 фунтов на кв. дюйм (2068,43 кПа).
[0035] Настоящее изобретение относится к плавучей вертикальной непрерывной структуре для погрузки, разгрузки, подъема и спуска труб с осью для свинчивания, развинчивания и установки морских объектов.
[0036] Плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб имеет корпус с главной палубой.
[0037] Корпус имеет верхнюю горловину, соединенную с главной палубой.
[0038] Корпус имеет верхнюю усеченно-коническую боковую секцию, соединенную с верхней горловиной и промежуточную горловину, соединенную с верхней усеченно-конической боковой секцией.
[0039] Корпус имеет нижнюю усеченно-коническую боковую секцию, проходящую от промежуточной горловины.
[0040] Используется эллипсоидный киль с горизонтальной плоскостью, который установлен на нижней усеченно-конической боковой секции.
[0041] На внешней части эллипсоидного киля закреплена выступающая часть в форме плавника, а в корпусе сформирована буровая шахта.
[0042] Вышка закреплена на корпусе поперечиной.
[0043] Корпус имеет пол буровой установки, установленный над главной палубой и эллипсоидным килем и вокруг буровой шахты.
[0044] В корпусе между главной палубой и эллипсоидным килем сформирован стеллаж для морского райзера, имеющий отверстие для райзера в главной палубе и проходящий к эллипсоидному килю параллельно оси для удержания свинченного морского райзера.
[0045] В корпусе между главной палубой и эллипсоидным килем сформирован стенд для обсадных труб, имеющий отверстие для обсадных труб в главной палубе и проходящий к эллипсоидному килю параллельно оси для удержания свинченной обсадной колонны.
[0046] В корпусе между главной палубой и эллипсоидным килем сформирован стенд для буровых труб, имеющий отверстие для буровых труб в главной палубе и проходящий к эллипсоидному килю параллельно оси для удержания свинченной колонны буровых труб.
[0047] Каждый стенд ориентирован под углом 60-120 градусов к горизонтальной плоскости эллипсоидного киля.
[0048] Каждый свинченный морской райзер, обсадная колонна или свинченная колонна буровых труб имеет длину от 70 до 270 футов (21,336-82,296 м).
[0049] Плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб имеет контроллер с процессором и энергонезависимый машиночитаемый носитель.
[0050] Машиночитаемый носитель содержит систему управления судном с зонами приоритета для морских объектов внутри корпуса.
[0051] Плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб имеет вертикально регулируемую лебедку с поперечной балкой, установленную рядом с буровой шахтой и сообщающуюся с контроллером, при этом лебедка содержит по меньшей мере один динамический поперечный поддерживающий элемент, предназначенный для взаимодействия с оборудованием низа колонны.
[0052] Плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб имеет автоматизированную систему подачи труб, установленную на корпусе и сообщающуюся с контроллером.
[0053] Автоматизированная система подачи труб выполнена с возможностью устанавливать свинченные морские райзеры в стенд для морских райзеров, свинченные обсадные трубы в стенд для обсадных труб или свинченные буровые трубы в стенд для буровых труб.
[0054] Плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб имеет автоматическую систему построения стендов, установленную на корпусе, сообщающуюся с контроллером и расположенную рядом с автоматизированной системой подачи труб.
[0055] Автоматическая система построения стендов выполнена с возможностью свинчивать морские райзеры, свинчивать обсадные трубы и свинчивать бурильные трубы под углом 55-125 градусов к горизонтальной плоскости эллиптического киля.
[0056] На фиг. 1 показана плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб для оперативной поддержки установок для морской разведки, бурения, добычи и хранения по настоящему изобретению.
[0057] Плавучая непрерывная вертикальная структура 10 для погрузки, разгрузки, подъема и спуска труб моет содержать корпус 12, на котором может быть установлена надстройка 13. Надстройка может содержать набор разнообразного оборудования и структур, таких как жилые помещения 58 для экипажа, склады оборудования, вертолетную посадочную площадку 54, и множество других структур, систем и оборудования, в зависимости от типа поддерживаемых морских операций. на надстройке могут быть установлены краны 53. Корпус 12 может быть закреплен на дне множеством цепных якорных оттяжек 16. Надстройка может иметь ангар 50 для летательных аппаратов. На надстройке может быть установлена диспетчерская вышка 51. Диспетчерская вышка может иметь систему 57 динамического позиционирования.
[0058] Плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб может иметь уникальную форму корпуса.
[0059] Как показано на фиг. 1 и 2, корпус 12 непрерывной вертикальной плавучей структуры 10 для погрузки, разгрузки, подъема и спуска труб может иметь главную палубу 12a, которая может быть круглой и находиться на высоте H. От главной палубы 12a вниз может проходить верхний усеченно-конический участок 14.
[0060] В некоторых вариантах верхний усеченно-конический участок может иметь верхнюю горловину 12b, проходящую вниз от главной палубы 12a, сужающуюся внутрь верхнюю усеченно-коническую боковую секцию 12g, расположенную под верхней горловиной 12b и соединенную с промежуточной сужающейся внутрь усеченно-конической боковой секцией 12c.
[0061] Плавучая вертикальная структура 10 для погрузки, разгрузки, подъема и спуска труб также может иметь нижнюю усеченно-коническую боковую секцию 12d, проходящую вниз от промежуточной сужающейся внутрь усеченно-конической боковой секции 12c, расширяясь наружу. И нижняя сужающаяся внутрь усеченно-коническая боковая секция 12c, и нижняя усеченно-коническая боковая секция 12d могут находиться ниже оперативной осадки 71.
[0062] Нижняя горловина 12e проходит от нижней усеченно-конической боковой секции 12d к эллипсоидному килю 12f.
[0063] Промежуточная сужающаяся внутрь усеченно-коническая боковая секция 12c моет иметь существенно большую вертикальную высоту H1, чем высота нижней усеченно-конической боковой секции 12d, обозначенная как H2. Верхняя горловина 12b может иметь немного большую вертикальную высоту H3, чем высота нижней горловины 12, проходящая от нижней усеченно-конической боковой секции 12d, обозначенная как H4.
[0064] Как показано на чертежах, верхняя горловина 12b может быть соединена с сужающейся внутрь верхней усеченно-конической боковой секцией 12 так, чтобы главная палуба имела больший радиус, чем радиус корпуса вместе с надстройкой 13, которая омет быть круглой, квадратной или иметь другую форму, например, форму половины круга. Сужающаяся внутрь верхняя усеченно-коническая боковая секция 12g может быть расположена выше оперативной осадки 71.
[0065] К нижней и верхней части внешней поверхности корпуса могут быть прикреплены имеющие форму плавника выступы 84.
[0066] Корпус 12 показан со множеством цепных якорных оттяжек 16 для крепления плавучей структуры для швартовки растяжками.
[0067] На фиг. 2 представлен упрощенный вид одного варианта вертикального профиля корпуса.
[0068] Показаны две разные осадки, оперативная осадка 71 и транспортная осадка 70.
[0069] Главная палуба 12a, верхняя горловина 12b, сужающаяся внутрь верхняя усеченно-коническая боковая секция 12g, промежуточная сужающаяся внутрь усеченно-коническая боковая секция 12, нижняя усеченно-коническая боковая секция 12d, нижняя горловина 12e и соответствующий эллипсоидный киль 12f расположены соосно с общей вертикальной осью 100. В разных вариантах корпус может характеризоваться эллиптическим сечением, перпендикулярным вертикальной оси 100 на любой высоте.
[0070] Благодаря своей эллиптической форме в плане, динамическая реакция корпуса 12 не зависит от направления волн (если пренебречь любой асимметрией в системе швартовки, райзеров и выступающих подводных частей корпуса), что сводит к минимуму создаваемые волнением боковые силы. Дополнительно, коническая форма корпуса 12 является структурно эффективной, давая высокую грузоподъемность и полезный объем на тонну стали по сравнению с традиционными морскими структурами в форме судна. Корпус 12 может иметь эллиптические стенки, которые являются эллипсоидными в радиальном сечении, но такая форма может быть усредненной, благодаря использованию большого количества плоских металлических панелей вместо придания панелям требуемой кривизны. Хотя эллиптическая форма корпуса в плане является предпочтительной, в альтернативном варианте можно использовать корпус м многоугольной формой в плане.
[0071] В одном варианте корпус 12 может быть круглым, овальным или эллиптическим, образуя эллиптическую форму в плане.
[0072] Эллиптическая форма может давать преимущество, когда плавучая структура пришвартована недалеко от другой морской платформы, что позволяет создать переходной мостик между этими двумя структурами. Эллиптический корпус может минимизировать или устранить влияние волн.
[0073] Конкретная конструкция промежуточной сужающейся внутрь усеченно-конической боковой секции 12 и нижней усеченно-конической боковой секции 12d существенное затухание излучения, что приводит к почти полному отсутствию усиления вертикальной качки для волн любого периода как будет описано ниже.
[0074] Промежуточная сужающаяся внутрь усеченно-коническая боковая секция 12c может быть расположена в зоне волн. При оперативной осадке 71 ватерлиния может находиться на промежуточной сужающейся внутрь усеченно-конической боковой секции 12c сразу под пересечением с верхней горловиной 12b. Промежуточная сужающаяся внутрь усеченно-коническая боковая секция 12c может иметь угол (α) развала относительно вертикальной оси 100 от 10 до 15 градусов. Сужающийся книзу раструб выше ватерлинии существенно гасит вертикальную качку, поскольку направленное вниз движение корпуса 12 увеличивает площадь воды в плоскости ватерлинии. Другими словами, площадь корпуса, нормальная к вертикальной оси 100, которая разбивает поверхность воды, увеличивается при движении корпуса вниз и на такую увеличенную площадь действует противоположно направленное сопротивление на интерфейсе с воздухом или водой. Было обнаружено, что развал в 10-15 градусов дает желаемую величину гашения направленной вниз вертикальной качки, не принося в жертву слишком большого полезного объема судна.
[0075] Аналогично, нижняя усеченно-коническая боковая секция 12d гасит направленную вверх вертикальную качку. Нижняя усеченно-коническая боковая секция 12d может быть расположена ниже зоны волн (приблизительно 30 м ниже ватерлинии). Поскольку вся нижняя усеченно-коническая боковая секция 12d может быть под поверхностью воды, требуется большая площадь (нормальная к вертикальной оси 100), чтобы добиться гашения направленного вверх движения. Соответственно, первый диаметр D1 нижней боковой секции корпуса может быть больше второго диаметра D2 промежуточной сужающейся внутрь усеченно-конической боковой секции 12c. Нижняя усеченно-коническая боковая секция 12d может иметь угол (γ) наклона к вертикальной оси 100 от 55 до 65 градусов. Эта нижняя боковая секция может расширяться наружу под углом не менее 55 градусов для создания большей инерции для вертикальной, бортовой и килевой качки. Увеличенная масса вносит вклад в естественные периоды вертикальной, бортовой и килевой качки выше ожидаемой энергии волн. Верхний предел в 65 градусов основан на желании избежать резких изменений в стабильности во время первоначальной балластировки установки. То есть нижняя усеченно-коническая боковая секция 12 может быть перпендикулярной вертикальной оси 100 и создавать требуемую величину гашения направленной вверх вертикальной качки, но такой профиль корпуса приведет к нежелательному ступенчатому изменению стабильности во время первоначальной балластировки установки. Соединительная точка между верхним усеченно-коническим участком 14 и нижней усеченно-конической боковой секцией 12d может иметь третий диаметр D3, который меньше первого и второго диаметров D1 и D2.
[0076] Транспортная осадка 70 представляет ватерлинию корпуса 12 во время его транспортировки к оперативному положению в море. Транспортная осадка, как известно в этой области, уменьшает количество энергии, необходимой для транспортировки плывущего судна на некоторые расстояния по воде за счет уменьшения профиля плавучей структуры, который контактирует с водой. Транспортная осадка находится приблизительно на пересечении нижней усеченно-конической боковой секции 12d и нижней горловины 12e. Однако погодные условия и ветры могут вызвать необходимость в другой транспортной осадке, чтобы выполнять требования к безопасности или для быстрого перемещения из одного положения на воде в другое.
[0077] В разных вариантах центр тяжести морского судна может быть расположен ниже его центра плавучести для придания собственной стабильности. Для понижения центра тяжести в корпус 12 добавляют балласт. При необходимости можно добавить достаточное количество балласта, чтобы опустить центр тяжести ниже центра плавучести в зависимости от конфигурации надстройки и полезной нагрузки, которую несет корпус 12.
[0078] Корпус отличается относительно высоким метацентром. Однако поскольку центр тяжести (ЦТ) расположен низко, метацентрическая высота еще больше увеличивается, что приводит к созданию высоких восстанавливающих моментов. Дополнительно, периферийное положение фиксированного балласта дополнительно увеличивает восстанавливающие моменты.
[0079] Плавучая структура агрессивно сопротивляется бортовой и килевой качке и является "невалким". Невалкие суда типично характеризуются внезапными порывистыми ускорениями, когда большие восстанавливающие моменты противодействуют бортовой и килевой качке. Однако инерция, связанная с большой полной массой плавучей структуры, особенно, увеличенной фиксированным балластом, смягчает такие ускорения. В частности, масса фиксированного балласта увеличивает собственный период колебаний плавучей структуры так, что он превышает период наиболее распространенных волн, тем самым ограничивая вызванные волами ускорения по всем степеням свободы.
[0080] В одном варианте плавучая вертикальная структура для погрузки, разгрузки, подъема и спуска труб может иметь движители 99a-99d.
[0081] На фиг. 3 показана непрерывная вертикальная плавучая структуру 10 для погрузки, разгрузки подъема и спуска труб с главной палубой 12a и надстройкой 13 над равной палубой.
[0082] В одном варианте на надстройке 13, которая содержит вертолетную площадку 54, может быть установлен кран 53
[0083] Показаны цепные якорные оттяжки 16, проходящие от верхней горловины 12.
[0084] Сходящаяся внутрь верхняя усеченно-коническая боковая секция 12 показана соединенной с нижней сходящейся внутрь усеченно-конической боковой секцией 12c и верхней горловиной 12b.
[0085] Плавучая структура может иметь транспортную осадку и оперативную осадку, при этом оперативная осадка достигается с помощью балластных насосов и балластных цистерн с водой в корпусе, после перемещения структуры с транспортной осадкой на место работ.
[0086] Транспортная осадка моет быть от приблизительно 7 м до приблизительно 15 м, а оперативная осадка может быть от приблизительно 45 м до приблизительно 65 м.
[0087] На фиг. 4 Приведен вид сбоку конфигурации вертикальной непрерывной плавучей структуры для погрузки, разгрузки, подъема и спуска труб с двумя вышками.
[0088] Вертикальная непрерывная плавучая структура для погрузки, разгрузки, подъема и спуска труб имеет поперечную лебедку 430 с регулируемой по вертикали балкой, установленную на поперечине 433 рядом с буровой шахтой 300, и сообщающуюся с контроллером. Эта поперечная лебедка с регулируемой по вертикали балкой имеет по меньшей мере один динамический поперечный поддерживающий элемент 432.
[0089] Поперечная лебедка 430 с регулируемой по вертикали балкой может состоять из пары параллельных подъемных вышек 431a и 431b, соединенных поперечиной 433.
[0090] Вертикальная непрерывная плавучая структура для погрузки, разгрузки, подъема и спуска труб имеет зону 443 свинчивания-развинчивания труб, сформированную между первой и второй вышками и прикрепленную динамическому поперечному поддерживающему элементу 432.
[0091] Показан отсек 303 морских райзеров, проходящая через главную палубу и уходящая вниз к эллипсоидному килю параллельно оси 11 в отсек для хранения свинченных морских райзеров.
[0092] Динамический поперечный поддерживающий элемент 432 может забирать свинченный морской райзер 306 для последующего спуска через буровую шахту 300.
[0093] На фиг. 5 показан вид сверху вертикальной непрерывной плавучей структуры для погрузки, разгрузки, подъема и спуска труб.
[0094] Показаны первая и вторая вышки 431a и 431b.
[0095] Одна вышка моет устанавливать свинченные обсадные трубы в отсек 308 для обсадных труб.
[0096] Другая вышка 531b может устанавливать свинченные морские райзеры 306 в отсек 303 для райзеров одновременно с установкой в отсек 308 для обсадных труб. Обе вышки могут устанавливать и извлекать соединенные морские трубы одновременно. Обе вышки могут извлекать свинченные обсадные трубы 312 и свинченные морские райзеры 306, соответственно, одновременно.
[0097] Третья вышка действует как автоматизированная система 560 свинчивания свечей.
[0098] На фиг. 6 приведен подробный вид третьей вышки для использования с буровыми трубами 318, которая известна как автоматизированная система 560 свинчивания свечей.
[0099] Автоматизированная система свинчивания свечей имеет раму 561, показанную с лебедкой 564 для свинчивания свечей, которая имеет захват 562 для соединения с буровой трубой 318, которая приводится во вращение вращающей машиной 566.
[0101] Автоматизированная система 560 свинчивания свечей расположена рядом с буровой шахтой 300 для установки свинченных буровых труб 318 в отсек 314 для буровых труб, который проходит от отверстия в полу 312 буровой установки к эллипсоидному килю.
[0101] Лебедка 564 для свинчивания свечей может использоваться для свинчивания и развинчивания морских райзеров, обсадных труб 312 и буровых труб 318 путем подъема не свинченных морских райзеров 306, не свинченных обсадных труб 312 и не свинченных буровых труб 318; опускания не свинченных морских райзеров 306, не свинченных обсадных труб 312 и не свинченных буровых труб 318; подъема свинченных морских райзеров 306, свинченных обсадных труб 312 и свинченных буровых труб 318; и опускания свинченных морских райзеров 306, свинченных обсадных труб 312 и свинченных буровых труб 318.
[0102] В разных вариантах показана ось 100 вертикальной непрерывной плавучей структуры для погрузки, разгрузки, подъема и спуска труб.
[0103] К поперечной лебедке 430 с регулируемой по вертикали балкой прикреплен крюк 52 для пропускания морских объектов через буровую шахту к морскому дну.
[0104] На фиг. 7 приведена схема компонентов вертикальной непрерывной плавучей структуры 10 для погрузки, разгрузки, подъема и спуска труб, соединенной с контроллером 420.
[0105] Показан контроллер 420 с процессором 422 и машиночитаемым носителем 424.
[0106] На корпусе 12 установлена автоматизированная система 440 подачи труб, сообщающаяся с контроллером 420. Автоматическая система 440 подачи труб выполнена с возможностью устанавливать и извлекать свинченные морские райзеры 306 в отсек 303 для морских райзеров и свинченные обсадные трубы 312 в отсек 308 для обсадных труб.
[0107] На корпусе 12 рядом с автоматизированной системой 440 подачи труб, установлена автоматизированная система 442 свинчивания свечей труб, сообщающаяся с контроллером 420.
[0108] Автоматизированная система 442 свинчивания выполнена с возможностью свинчивать морские райзеры 306, обсадные трубы 312 и буровые трубы 318 под углом от 55 до 125 градусов к горизонтальной плоскости эллипсоидного киля.
[0109] Поперечная лебедка 430 с регулируемой по вертикали балкой, установленная на поперечине рядом с буровой шахтой, сообщается с контроллером 420.
[0110] Система 470 фонтанного оборудования для испытания подводного устья с легкой лебедкой прикреплена к поперечной лебедке 430 с регулируемой по вертикали балкой и сообщается с контроллером 420.
[0111] Система 444 швартовки закреплена на одной из вышек и сообщается с контроллером.
[0112] На корпусе установлено множество устройств 500a и 500b для считывания радиочастотных идентификационных меток, которые сообщаются с контроллером 420.
[0113] Множество устройств для считывания радиочастотных меток выполнены с возможностью сканировать коды 502 радиочастотной идентификации, прикрепленные к входящим и исходящим морским объектам 499.
[0114] Каждый код 502 радиочастотной идентификационной метки указывает зоне 428 приоритета в корпусе 12.
[0115] Устройства 500a, b считывания радиочастотных идентификационных меток расположены рядом по меньшей мере с одним из следующих компонентов: буровая шахта 300, автоматизированная система подачи труб, пол 302 буровой установки, главная палуба 12a и участки между главной палубой 12a и эллипсоидным килем 12f в корпусе 12.
[0116] В разных вариантах в корпусе установлена система 504 видеонаблюдения, сообщающаяся с контроллером 420. Система 504 видеонаблюдения направляет изображение 506 с камер на машиночитаемый носитель контроллера.
[0117] В разных вариантах вертикальная непрерывная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет генератор 530 радиоволн, соединенный с контроллером 420.
[0118] Генератор 530 радиоволн сообщается с приемником 533 радиоволн и камерой 534 линии прямой видимости.
[0119] Роботы 520 перемещения оборудования также сообщаются с контроллером 420.
[0120] На фиг. 8 приведена диаграмма одного варианта контроллера 420.
[0121] Контроллер 420 имеет процессор 422, например, вычислитель, который дополнительно сообщается с машиночитаемым носителем 424, который содержит: систему 426 управления судном с зонами 428 приоритета для морских объектов в корпусе 12.
[0122] Машиночитаемый носитель 424 содержит изображения 506 от системы видеонаблюдения и базу 508 данных радиочастотных идентификационных меток.
[0123] База 508 данных радиочастотных идентификационных меток связывает коды радиочастотной идентификации с одним из морских объектов в корпусе 12.
[0124] В разных вариантах машиночитаемый носитель 424 содержит систему 510 распознавания материалов.
[0125] Машиночитаемый носитель содержит команды 512 для процессора 422 использовать изображения 506 системы видеонаблюдения вместе с системой 510 распознавания материалов для распознавания морских объектов 499 с помощью кодов 502 радиочастотной идентификации, используя базу 508 данных радиочастотных идентификационных меток.
[0126] На машиночитаемом носителе хранятся сигналы 536 тревоги.
[0127] Машиночитаемый носитель имеет команды 538 для процессора 422 для автоматического вывода сигналов 536 тревоги для предупреждения столкновений роботов 520, перемещающих оборудование, когда роботы 520, перемещающие оборудование, транспортируют морские объекты 499.
[0128] На фиг. 9 показан фрагмент динамической поперечной поддерживающей балки 432 с системой 446 подводного развертывания.
[0129] Система 446 подводного развертывания имеет множество желобчатых роликов 448, установленных на динамическом поперечном поддерживающем элементе 432, и автоматически регулируемый компенсатор вертикальной качки с подъемной системой 450, установленной на множестве желобчатых роликов 448.
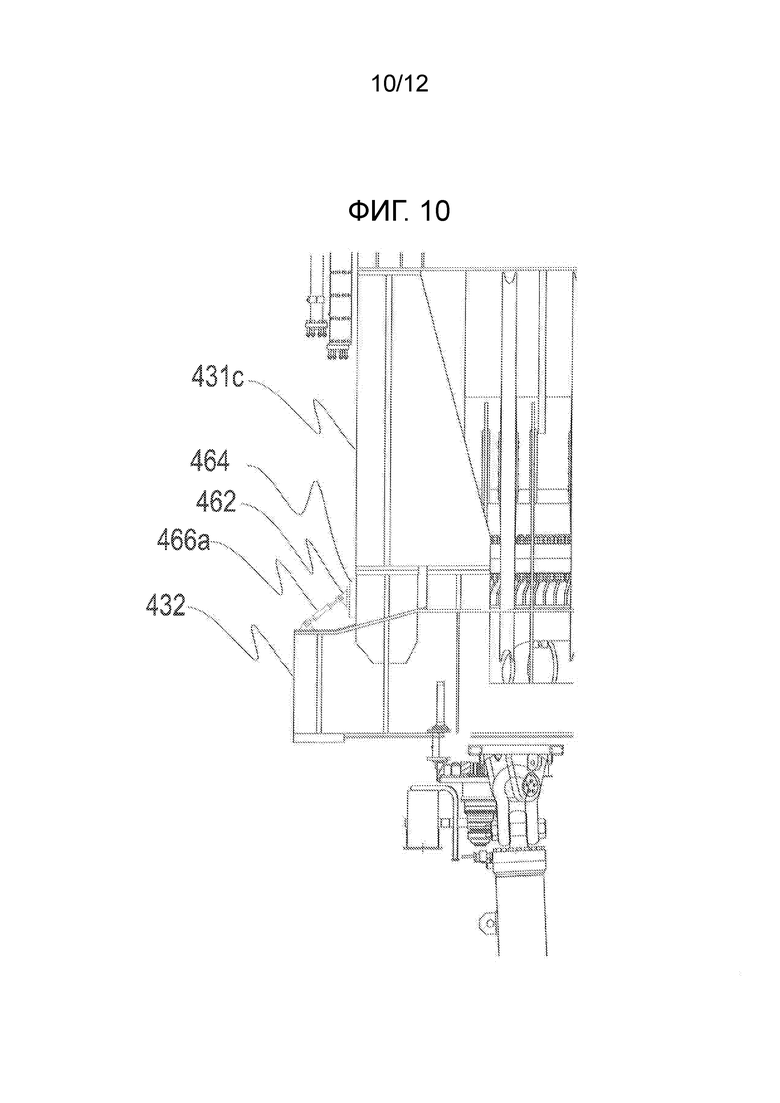
[0130] На фиг. 10 показан фрагмент автоматической системы 440 подачи труб.
[0131] Используется вышка 431c с фиксирующим механизмом 462 для зацепления с вышкой 431c.
[0132] На по меньшей мере одной вышке 431c установлена реечная передача, приводящая в действие динамический поперечный поддерживающий элемент 432 для регулировки высоты свинченных морских труб и высоты забойного оборудования.
[0133] Используется множество гидравлических поршней 466a.
[0134] Каждый гидравлический поршень 466a прикреплен одним концом к вышке 431c, а другим концом - к динамическому поперечному поддерживающему элементу 432.
[0135] Множество гидравлических поршней 466a выполнено с возможностью наклонять динамический поперечный поддерживающий элемент 432 для формирования горизонтальной плоскости, параллельной горизонтальной плоскости эллиптического киля.
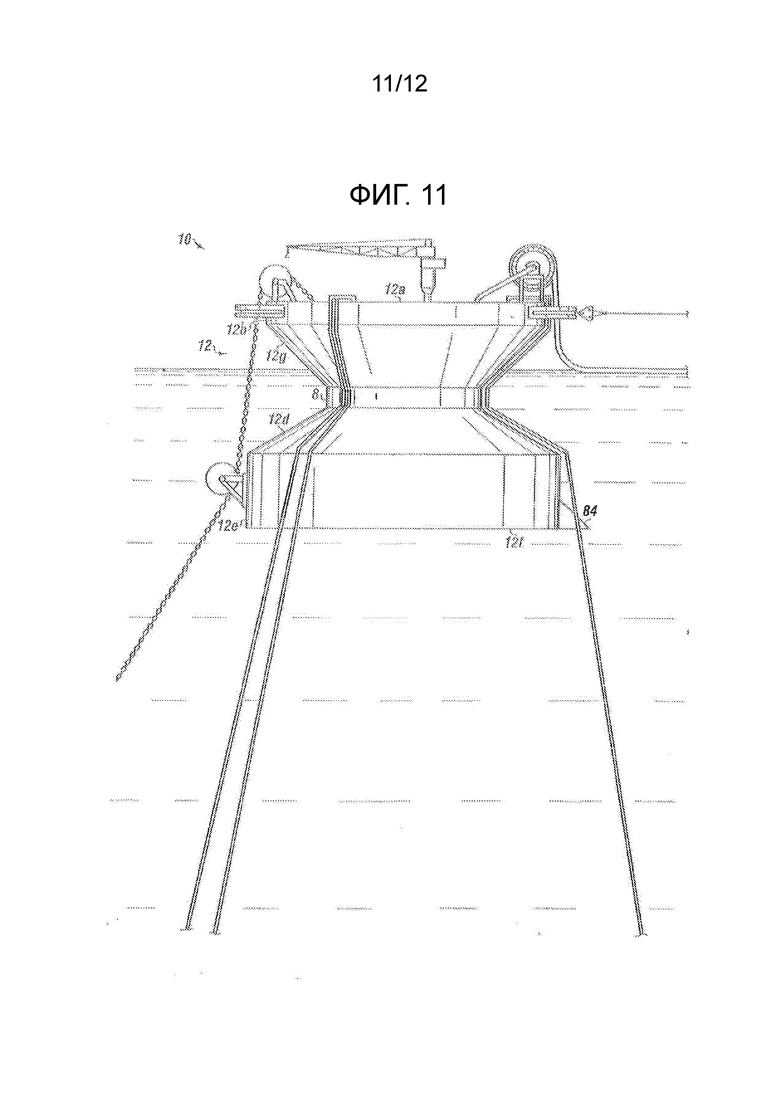
[0136] На фиг. 11 приведен вид сбоку непрерывной вертикальной плавучей структуры 10 для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной 8.
[0137] Показана непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб, имеющая корпус 12 с главной палубой 12a.
[0138] Непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет верхнюю горловину 12b, проходящую вниз от главной палубы 12a, и верхнюю усеченно-коническую боковую секцию 12, от верхней горловины 12b.
[0139] Непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет промежуточную горловину 8, соединенную с верхней усеченно-конической боковой секцией 12g.
[0140] От промежуточной горловины 8 проходит нижняя усеченно-коническая боковая секция 12d.
[0141] С нижней усеченно-конической боковой секцией 12 соединена нижняя горловина 12e.
[0142] На дне нижней горловины 123 сформирован эллиптический киль 12f.
[0143] К нижней и внешней части эллипсоидного киля 12f прикреплены выступы 84 в форме плавника.
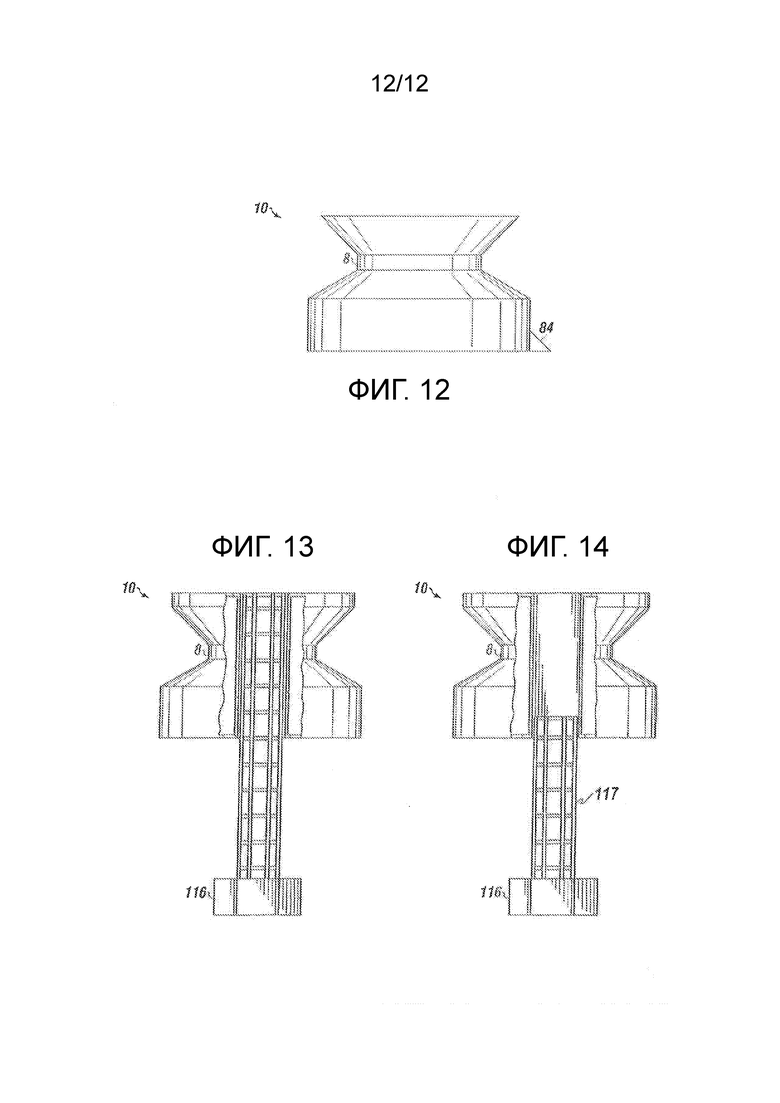
[0144] На фиг. 12 показан детальный вид непрерывной вертикальной плавучей структуры 10 для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной 8.
[0145] Непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб показана с промежуточной горловиной 8.
[0146] Выступ 84 в форме плавника показан прикрепленным к нижней и внешней части внешней поверхности эллипсоидного киля 12f и проходящим от эллипсоидного киля 12f в воду.
[0147] На фиг. 13 приведен вид с вырезом непрерывной вертикальной плавучей структуры 10 для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной 8 в транспортной конфигурации.
[0148] Плавучая структура 10 показана с промежуточной горловиной 8.
[0149] В разных вариантах плавучая структура 10 может иметь маятник 116, который может быть выполнен подвижным. В разных вариантах маятник применяется при необходимости и может быть частично встроен в корпус 12 для дополнительной регулировки работы корпуса.
[0150] На этом чертеже маятник 116 показан на транспортной глубине.
[0151] В разных вариантах подвижный маятник может быть выполнен с возможностью перемещения между транспортной глубиной и оперативной глубиной, и маятник может быть выполнен с возможностью гасить движение плавсредства, когда плавсредство движется в воде сбоку набок.
[0152] На фиг. 13 приведен вид с вырезом непрерывной вертикальной плавучей структуры 10 для погрузки, разгрузки, подъема и спуска труб с промежуточной горловиной 8 в оперативной конфигурации.
[0153] На этом чертеже маятник 116 показан на оперативной глубине проходящим от плавучей структуры 10.
[0154] В разных вариантах непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет систему 470 фонтанного оборудования для испытания подводного устья с легкой лебедкой, прикрепленную к поперечной лебедке 430 с регулируемой по вертикали балкой.
[0155] В разных вариантах поперечная лебедка 430 с регулируемой балкой имеет пару подъемных вышек 431a и 431b, соединенных поперечиной 433.
[0156] В разных вариантах главная палуба 12a имеет надстройку 13, имеющую по меньшей мере один элемент, выбранный из группы, содержащей: жилые помещения 58, вертолетную площадку 54, кран 53, диспетчерскую башню 51, систему 99a-66d динамического позиционирования в диспетчерской башне 51, и ангар 50 для летательных аппаратов.
[0157] В разных вариантах буровая шахта в горизонтальной плоскости корпуса 12 имеет форму, выбранную из группы, содержащей эллипсоид, прямоугольник, восьмиугольник и многоугольник.
[0158] В разных вариантах буровая шахта 300 имеет усеченно-коническую форму, проходящую параллельно оси.
[0159] В разных вариантах поперечная лебедка 430 с регулируемой по вертикали балкой имеет Н-образную форму.
[0160] В разных вариантах динамический поперечный поддерживающий элемент 432 имеет зону 433 свинчивания и развинчивания, сформированную между первой и второй вышками и прикрепленную к динамическому поперечному поддерживающему элементу.
[0161] В разных вариантах непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб содержит систему 444 швартовки, закрепленную на одной из вышек 431a и 431b.
[0162] В разных вариантах непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет систему 446 подводного развертывания.
[0163] Система подводного развертывания имеет множество желобчатых роликов 448, установленных на динамическом поперечном поддерживающем элементе 432; автоматически регулируемый компенсатор вертикальной качки с подъемной системой 450, установленную на множестве желобчатых роликов 448; и крюк 52, соединенный с поперечной лебедкой 430 с регулируемой по вертикали балкой для развертывания морских объектов 499 через буровую шахту 300 на дне моря.
[0164] В разных вариантах автоматизированная система 440 подачи труб имеет захватывающий механизм для зацепления с вышкой; реечный привод 464, установленный по меньшей мере на одной из вышек 431a и 431b,, приводящий в действие динамический поперечный поддерживающий элемент 432, множество гидравлических поршней 466a, выполненных с возможностью наклонять динамический поперечный поддерживающий элемент 432 относительно горизонтальной плоскости, параллельной горизонтальной плоскости эллипсоидного киля 12f.
[0166] В разных вариантах непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб содержит: множество устройств 500a и 500b для считывания радиочастотных идентификационных меток, установленных в корпусе 12 и сообщающихся с контроллером 420, при этом множество устройств 500a и 500b для считывания радиочастотных идентификационных меток выполнено с возможностью сканировать коды 502 радиочастотной идентификации, присвоенные входящим и исходящим морским объектам 499, и каждый код 502 радиочастотной идентификации указывает на зону 428 приоритета в корпусе 12 системы 426 управления судном, при этом устройства 500a, 500b считывания радиочастотных идентификационных меток установлены рядом с по меньшей мере одним объектом из группы, содержащей буровую шахту 300, автоматическую систему подачи труб, пол 302 буровой установки, главную палубу 12a, области между главной палубой 12a и эллипсоидным килем 12f в корпусе 12; систему 504 видеонаблюдения, установленную в корпусе 12 и сообщающуюся с контроллером 420, подавая на машиночитаемый носитель 424 изображения 506 системы видеонаблюдения; базу 508 данных радиочастотных идентификационных меток на машиночитаемом носителе 424; База 508 данных радиочастотных идентификационных меток связывает коды 502 радиочастотных идентификационных меток с одним из морских объектов 499 корпусе 12; систему 510 распознавания материала на машиночитаемом носителе 424; команды на машиночитаемом носителе 424 для процессора 422 для использования изображений 506 системы видеонаблюдения с системой 510 распознавания материала для распознавания морских объектов 499 с помощью кодов 502 радиочастотной идентификации с использованием базы 508 данных радиочастотных идентификационных меток; и множество роботов 520 для перемещения оборудования, сообщающихся с контроллером 420 для перемещения визуально идентифицированных морских объектов 499 с просканированными радиочастотными метами в зону 428 приоритета.
[0167] В разных вариантах непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет по меньшей мере одно устройство из группы, содержащей: генератор 530 радиоволн с датчиками 533 радиоволн и камеру 534 линии прямой видимости, сообщающуюся с контроллером 420, при этом машиночитаемый носитель 424 имеет хранящиеся сигналы 536 тревоги и команды 538 для процессора для автоматического вывода сигналов тревоги для предотвращения столкновения роботов, перемещающих оборудование, когда роботы, перемещающие оборудование, транспортируют морские объекты.
[0168] В разных вариантах непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб имеет верхнюю горловину 12b, проходящую вниз от главной палубы 12a; верхнюю усеченно-коническую боковую секцию 12g, расположенную под верхней горловиной 12b и удерживаемую над поверхностью воды при транспортной осадке и частично под поверхностью воды при оперативной осадке; и в которой верхняя усеченно-коническая боковая секция 12 имеет постепенно уменьшающийся диаметр от диаметра верхней горловины 12b.
[0169] В разных вариантах автоматизированная система 442 свинчивания свечей труб имеет раму 561, поддерживающую нагрузку, возвышающуюся над главной палубой 12a; лебедку 564 для свинчивания свечей для подъема не свинченных морских райзеров 306, не свинченных обсадных труб 312, не свинченных буровых труб 318 и для спуска свинченных морских райзеров 306, свинченных обсадных труб 312, свинченных буровых труб 318 и для подъема свинченных морских райзеров 306, свинченных обсадных труб 312, свинченных буровых труб 318 для развинчивания на отдельные морские райзеры 306, обсадные трубы 312 и буровые трубы 318; захват 652, прикрепленный к лебедке 564 и крутильную машину 566, прикрепленную к раме 561, поддерживающей нагрузку для стягивания и распускания свинченных морских райзеров 306, свинченных обсадных труб 312 или свинченных буровых труб 318.
[0170] В разных вариантах поперечная лебедка 430 с вертикально регулируемой балкой может иметь "+"-, "I"- или "#"-образную форму.
[0171] В качестве примера, в настоящем изобретении изображения 506 системы видеонаблюдения, сканирующей трубу или задвижку, подаются на процессор 422 с машиночитаемым носителем 424, имеющем систему 510 распознавания материала для выполнения операции распознавания материала. Устройства 500a, 500b считывания радиочастотных идентификационных меток также соединены с процессором 422 для считывания кодов 502 радиочастотной идентификации на трубе или задвижке. Процессор 422 затем использует команды на машиночитаемом носителе 424 для сравнения считанного кода 502 с перечнем кодов в базе 508 данных кодов радиочастотной идентификации, чтобы проверить, принадлежит ли код 502 распознаваемому объекту и должен ли объект находиться на борту плавучей структуры. Таким образом, процессор распознает просканированные морские объекты 499, используя одновременно и распознавание материала, и кодами 502 радиочастотной идентификации, определяя, что морской объект 499 должен находится на борту структуры и определяя, в какой зоне 428 приоритета должен находиться объект на плавучей структуре.
[0172] Более конкретно, Система 504 видеонаблюдения вместе с устройствами 500a, 500b считывания радиочастотных идентификационных меток сканируют задвижку. Процессор 422 сравнивает код 502 радиочастотной идентификации для плавучей структуры, и идентификацию, полученную сканированием, и выдает уведомление оператору, работающему с процессором 422 о том, что проверенная задвижка не только является нужной задвижкой, но и должна находиться на плавучей структуре.
[0173] Иллюстративная плавучая структура - Driller SSP - The Ultimate Drilling Machine (UDM)
[0174] Непрерывная вертикальная плавучая структура 10 для погрузки, разгрузки, подъема и спуска труб, имеющая высоту 75 м и диаметр 100 м, имеет вертикальную ось 100, проходящую через буровую шахту 300 и может использоваться для свинчивания, развинчивания и установки морских объектов 499.
[0175] Непрерывная вертикальная плавучая структура для погрузки, разгрузки, подъема и спуска труб, именуемая "Driller SSP - The Ultimate Drilling Machine (UDM)" может иметь корпус 12 с несколькими вертикальными компонентами.
[0176] Корпус "Driller SSP - The Ultimate Drilling Machine (UDM)" имеет главную палубу 12a, имеющую множество уровней. Пол буровой площадки находится на высоте 15 м над главной палубой 12a.
[0177] Корпус имеет верхнюю горловину 12b, проходящую на 5 м от главной палубы 12a и соединенную с ней.
[0178] "Driller SSP - The Ultimate Drilling Machine (UDM)" имеет первую усеченно-коническую боковую секцию 12g, проходящую на 40 м от верхней горловины и соединенную с верхней горловиной.
[0179] Корпус 12 "Driller SSP - The Ultimate Drilling Machine (UDM)" имеет промежуточную горловину 8, соединенную с верхней усеченно-конической боковой секцией 12g.
[0180] Нижняя усеченно-коническая секция 12d длиной 20 м проходит от промежуточной горловины 8 и соединена с ней.
[0181] Нижняя горловина 12e длиной 5 м проходит от нижней усеченно-конической боковой секции 12d.
[0182] К нижней горловине 12e прикреплен многоугольный усиленный киль 12f, имеющий горизонтальную плоскость.
[0183] Имеющие форму плавника выступающие части 84, имеющие в сечении треугольную форму, закреплены на внешней части эллипсоидного киля 12f и отходят от киля на 7 м.
[0184] В корпусе 2 сформирована буровая шахта 300, имеющая переменную площадь сечения, с изменяющимися диаметром и формой.
[0185] Стеллаж 303 для морских райзеров может входит на 150 футов (45,72 м) в корпус 12 и быть выровненным по оси 100 корпуса.
[0186] Стеллаж 303 для морских райзеров имеет отверстие в главной палубе 12a и используется для хранения по меньшей мере 14000 футов (4267,2 м) морских райзеров 306, т.е., 100 свинченных морских райзеров 306.
[0187] Сформирован стеллаж 308 для обсадных труб, который в этом примере имеет другую длину (но в других примерах может иметь длину, идентичную стеллажу 303 для морских райзеров). Для обсадных труб 312 этот стеллаж 308 может иметь длину 180 футов (54,864 м) и, как и стеллаж 303 для морских райзеров, проходить через отверстие в главной палубе 12a в направлении эллипсоидного киля 12f параллельно оси для хранения свинченных обсадных труб 312. в этом Driller SSP можно хранить 20000 футов (6096 м) обсадных труб, расположенных в стеллаже 308, т.е., 140 свинченных секций обсадных труб.
[0188] Сформирован стеллаж 314 буровых труб, в этом примере идентичный стеллажу 308 для обсадных труб, проходящий через главную палубу 12a в направлении эллиптического киля 12f параллельно оси и предназначенный для хранения свинченных буровых труб 318.
[0189] В этом примере в "Driller SSP - The Ultimate Drilling Machine (UDM)" каждый стеллаж ориентирован под углом 90 градусов к горизонтальной плоскости эллипсоидного киля 12f.
[0190] В этом примере "Driller SSP - The Ultimate Drilling Machine (UDM)" имеет контроллер 420 с процессором 422, например, вычислителем, и машиночитаемый носитель 424. Машиночитаемый носитель 424 содержит: систему 426 управления судном с зонами 428 приоритета для морских объектов 499 в корпусе 12.
[0191] "Driller SSP - The Ultimate Drilling Machine (UDM)" имеет поперечную лебедку 430 с вертикально регулируемой балкой, установленную на поперечине 433 рядом с буровой шахтой 300 и сообщающуюся с контроллером 420. Лебедка имеет по меньшей мере один динамический поперечный поддерживающий элемент 432 и имеет грузоподъемность 2000 коротких тонн (1814,37 метрических тонн).
[0192] На корпусе установлена система 440 автоматизированной подачи труб, способная перемещать 36 свечей буровых труб 314 в час.
[0193] Автоматизированная система 440 подачи труб сообщается с контроллером 420 и может автоматически захватывать индивидуальную буровую трубу 318, поднимать трубу, соединять ее со второй трубой, вращать буровую трубу 318, свинчивая трубы, а затем, опускать свинченную буровую трубу 318. Автоматизированная система 440 подачи труб выполнена с возможностью устанавливать и извлекать свинченные морские райзеры 306 в стеллаже 303 для морских райзеров и свинченные обсадные трубы 312 в стеллаже 308 для обсадных труб.
[0194] С контроллером 420 соединена автоматизированная система 560 свинчивания свечей, соединяющая множество морских райзеров 306. Автоматизированная система 560 свинчивания свечей способна свинчивать 15 соединений в час и установлена рядом с автоматизированной системой 440 подачи труб.
[0195] "Driller SSP - The Ultimate Drilling Machine (UDM)" имеет автоматизированную систему 560 свинчивания свечей, выполненную с возможностью свинчивать морские райзеры 306, обсадные трубы 312 и буровые трубы 318 под углом от 95 градусов к горизонтальной плоскости эллипсоидного киля 12f.
[0196] Хотя настоящее изобретение было описано со ссылками на конкретные варианты, следует понимать, что в пределах объема настоящего изобретения такие варианты могут быть реализованы в других формах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧАЯ БУРОВАЯ УСТАНОВКА | 2018 |
|
RU2763006C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПЛАВУЧЕЙ МОРСКОЙ БАЗЫ | 2016 |
|
RU2683920C2 |
| Технологический комплекс для морского кустового бурения | 2019 |
|
RU2731010C1 |
| ПЛАВУЧАЯ УСТАНОВКА | 2016 |
|
RU2684939C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ПЛАВУЧЕЙ УСТАНОВКИ | 2018 |
|
RU2745894C1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| СИСТЕМА ПОДВОДНОЙ ДОБЫЧИ С ОПОРОЙ БАШЕННОГО ТИПА СООРУЖЕНИЯ ДОБЫЧИ В АРКТИКЕ | 2011 |
|
RU2583028C2 |
| СПОСОБ МОРСКОЙ ДОБЫЧИ, ХРАНЕНИЯ И ВЫГРУЗКИ НЕФТИ С ПОМОЩЬЮ ПЛАВУЧЕЙ КОНСТРУКЦИИ | 2018 |
|
RU2747345C1 |
| АЛЮМИНИЕВАЯ КОМПОНОВКА РАЙЗЕРА | 2009 |
|
RU2457313C1 |
| Установка для глубоководного бурения и способ глубоководного бурения | 2018 |
|
RU2694669C1 |

Изобретение касается плавучих структур для морских операций по добыче нефти и газа. Непрерывная вертикальная плавучая структура для погрузки, разгрузки подъема и спуска труб имеет корпус, главную палубу, верхнюю горловину, проходящую вниз от главной палубы, верхнюю усеченно-коническую боковую секцию, промежуточную горловину, нижнюю горловину, проходящую от промежуточной горловины, эллипсоидный киль и выступ в форме плавнике, прикрепленный к нижней и внешней части внешней поверхности эллипсоидного киля. Верхняя усеченно-коническая боковая секция расположена под верхней горловиной и удерживается над поверхностью воды при транспортной осадке и частично ниже поверхности воды при оперативной осадке плавучей структуры. Автоматизированная система свинчивания свечей, установленная в корпусе, сообщается с контроллером и выполнена с возможностью свинчивать морские райзеры, обсадные и буровые трубы. Технический результат заключается в улучшении эксплуатационных характеристик плавучей структуры для погрузки, разгрузки подъема и спуска труб, а также в повышении безопасности ее эксплуатации. 14 з.п. ф-лы, 14 ил.
1. Непрерывная вертикальная плавучая структура для погрузки, разгрузки, подъема и спуска труб с осью для свинчивания, развинчивания и установки морских объектов, содержащая:
a. корпус, содержащий:
(i) главную палубу;
(ii) верхнюю горловину, соединенную с главной палубой;
(iii) верхнюю усеченно-коническую боковую секцию, соединенную с верхней горловиной;
(iv) промежуточную горловину, соединенную с верхней усеченно-конической боковой секцией;
(v) нижнюю усеченно-коническую боковую секцию, проходящую от промежуточной горловины;
(vi) нижнюю горловину, проходящую от нижней усеченно-конической боковой секции;
(vii) эллипсоидный киль, имеющий горизонтальную плоскость, установленный на нижней горловине;
(viii) выступ в форме плавника, прикрепленный к внешней части эллипсоидного киля, и буровую шахту, сформированную в корпусе;
(ix) пол буровой площадки, установленный над главной палубой и эллипсоидным килем и расположенный вокруг буровой шахты;
(x) стеллаж для морских райзеров, проходящий через главную палубу в направлении эллипсоидного киля параллельно оси, для хранения свинченных морских райзеров;
(xi) стеллаж для обсадных труб, проходящий через главную палубу в направлении эллипсоидного киля параллельно оси, для хранения свинченных обсадных труб;
(xii) стеллаж для буровых труб, проходящий через главную палубу в направлении эллипсоидного киля параллельно оси, для хранения свинченных буровых труб;
(xiii) вышку, установленную на корпусе с поперечиной;
при этом каждый стеллаж ориентирован под углом от 60 до 120 градусов к горизонтальной плоскости эллипсоидного киля; и причем каждый свинченный морской райзер, свинченная обсадная труба или свинченная буровая труба имеет длину от 50 до 270 футов (15,24-82,296 м);
b. контроллер с процессором и машиночитаемый носитель, при этом машиночитаемый носитель содержит систему управления судном с зонами приоритета для морских объектов в корпусе;
c. поперечную лебедку с вертикально регулируемой балкой, установленную на поперечине рядом с буровой шахтой, сообщающуюся с контроллером и содержащую по меньше мере один динамический поперечный поддерживающий элемент;
d. автоматизированную систему подачи труб, установленную на корпусе, сообщающуюся с контроллером и выполненную с возможностью установки и извлечения свинченных морских райзеров в стеллаже для морских райзеров и свинченных обсадных труб в стеллаже для обсадных труб, и
e. автоматизированную систему свинчивания свечей, установленную в корпусе, сообщающуюся с контроллером и расположенную рядом с автоматизированной системой подачи труб, при этом автоматизированная система свинчивания свечей выполнена с возможностью свинчивания морских райзеров, обсадных труб и буровых труб под углом от 55 до 125 градусов к горизонтальной плоскости эллипсоидного киля.
2. Структура по п. 1, содержащая систему фонтанного оборудования для испытания подводного устья с системой лебедки, прикрепленную к поперечной лебедке с вертикально регулируемой балкой и сообщающуюся с контроллером.
3. Структура по п. 1, в которой поперечная лебедка с вертикально регулируемой балкой содержит первую и вторую дополнительные параллельные подъемные вышки, при этом поперечная лебедка с вертикально регулируемой балкой соединена между парой вышек.
4. Структура по п. 1, в которой главная палуба имеет надстройку, содержащую по меньшей мере один элемент из группы, содержащей: жилые помещения, вертолетную площадку, кран, диспетчерскую башню, систему динамического позиционирования в диспетчерской башне, и ангар для летательных аппаратов.
5. Структура по п. 1, в которой буровая шахта имеет в горизонтальной плоскости корпуса форму, выбранную из группы; эллипсоид, прямоугольник, восьмиугольник и многоугольник.
6. Структура по п. 1, в которой буровая шахта имеет усеченно-коническую форму, проходящую параллельно оси.
7. Структура по п. 3, в которой поперечная лебедка с вертикально регулируемой балкой имеет Н-образную форму.
8. Структура по п. 3, в которой динамический поперечный поддерживающий элемент содержит зону свинчивания и развинчивания, сформированную между первой и второй вышками и прикрепленную к динамическому поперечному поддерживающему элементу.
9. Структура по п. 8, содержащая систему швартовки, прикрепленную по меньшей мере к одной вышке и сообщающуюся с контроллером.
10. Структура по п. 1, содержащая систему подводного развертывания, содержащую:
a. множество желобчатых роликов, установленных на динамическом поперечном поддерживающем элементе;
b. автоматически регулируемый компенсатор вертикальной качки с подъемной системой, установленной на множестве желобчатых роликов; и
c. крюк, соединенный с поперечной лебедкой с вертикально регулируемой балкой для размещения морских объектов через буровую шахту на морском дне.
11. Структура по п. 1, в которой автоматизированная система подачи труб содержит:
a. запирающий механизм для зацепления с вышкой;
b. реечный привод, установленный по меньшей мере на одной вышке, приводящий в действие динамический поперечный поддерживающий элемент для регулировки высоты свинченных морских труб и глубины забойного оборудования; и
c. множество гидравлических поршней, при этом каждый поршень прикреплен одним концом по меньшей мере к одной вышке, а другим концом к динамическому поперечному поддерживающему элементу, при этом множество гидравлических поршней выполнено с возможностью наклона динамического поперечного поддерживающего элемента относительно горизонтальной плоскости, параллельной горизонтальной плоскости эллипсоидного киля.
12. Структура по п. 1, содержащая:
a. множество устройств считывания меток радиочастотной идентификации, установленных в корпусе и сообщающихся с контроллером, при этом множество устройств считывания меток радиочастотной идентификации выполнено с возможностью сканирования кодов радиочастотной идентификации меток, прикрепленных к входящим и исходящим морским объектам, при этом каждый код радиочастотной идентификации указывает на зону приоритета в корпусе, при этом множество устройств считывания меток радиочастотной идентификации установлено рядом с по меньшей мере одним объектом из группы, содержащей: буровую шахту, автоматизированную систему подачи труб, пол буровой установки, главную палубу, и области между главной палубой и эллипсоидным килем в корпусе;
b. систему видеонаблюдения, смонтированную в корпусе и сообщающуюся с контроллером, подавая изображения системы видеонаблюдения на машиночитаемый носитель;
c. базу данных меток радиочастотной идентификации на машиночитаемом носителе, связывающую коды радиочастотной идентификации с одним из морских объектов в корпусе;
d. систему распознавания материала на машиночитаемом носителе;
e. команды на машиночитаемом носителе для процессора для использования изображений системы видеонаблюдения вместе с системой распознавания материала для определения морских объектов с помощью кодов радиочастотной идентификации, используя базу данных меток радиочастотной идентификации; и
f. множество роботов, перемещающих оборудование, сообщающихся с контроллером для перемещения морских объектов, просканированных устройствами считывания меток радиочастотной идентификации и визуально определенных, в зону приоритета.
13. Структура по п. 12, дополнительно содержащая по меньшей мере одно устройство из группы, содержащей: генератор радиоволн с датчиком радиоволн и камерой линии прямой видимости, сообщающиеся с контроллером, машиночитаемый носитель с хранящимися сигналами тревоги и командами для процессора для автоматического вывода сигналов тревоги для предотвращения столкновений роботов, перемещающих оборудование, когда роботы, перемещающие оборудование, транспортируют морские объекты.
14. Структура по п. 1, в которой:
(i) верхняя горловина проходит вниз от главной палубы;
(ii) верхняя усеченно-коническая боковая секция расположена над промежуточной горловиной и удерживается над уровнем воды при транспортной осадке и частично ниже уровня воды при оперативной осадке; и
при этом верхняя усеченно-коническая боковая секция имеет постепенно уменьшающийся диаметр от диаметра верхней горловины.
15. Структура по п. 1, в которой автоматизированная система свинчивания свечей содержит:
a. раму, поддерживающую нагрузку, проходящую над главной палубой;
b. лебедку свинчивания свечей для свинчивания или развинчивания морских райзеров, обсадных и бурильных труб, выполняя следующие операции:
(i) подъема не свинченных райзеров, не свинченных обсадных труб и не свинченных буровых труб;
(ii) спуска не свинченных райзеров, не свинченных обсадных труб и не свинченных буровых труб;
(iii) подъема свинченных райзеров, свинченных обсадных труб и свинченных буровых труб;
(iv) спуска свинченных райзеров, свинченных обсадных труб и свинченных буровых труб;
c. захват, прикрепленный к раме, поддерживающей нагрузку; и
d. крутильную машину, прикрепленную к раме, поддерживающей нагрузку, для стягивания и распускания свинченных или не свинченных морских райзеров, обсадных или буровых труб.
| WO 2015088745 A1, 18.06.2015 | |||
| US 2013084136 A1, 04.04.2013 | |||
| US 4117691 A, 03.10.1978 | |||
| US 3831385 A, 27.08.1974 | |||
| WO 2016137643 A1, 01.09.2016. |

