Изобретение относится к области животноводства, а именно к системам для автоматического отслеживания поведения отдельных животных в стаде для выявления наиболее благоприятного времени для их оплодотворения, преимущественно искусственного. Изобретение применимо к различным видам животных, в особенности к крупному рогатому скоту.
Искусственное оплодотворение домашних животных, в том числе молочных коров – важная процедура в молочной и других отраслях животноводства. Когда планируется естественное разведение необходимо знать время, пригодное для разведения. У многих видов домашних и диких животных самки животного должны быть осеменены во время или вскоре после относительно короткого периода наибольшей половой активности для достижения зачатия. Этот период также называют эстральным периодом, течкой или половой охотой.
У крупного рогатого скота эстральный период у небеременных самок наступает примерно каждые 21 день. Эструс у крупного рогатого скота длится относительно короткий период от 12 до 24 часов, в течение которого коровы должны быть осеменены, чтобы забеременеть. В современном молочном животноводстве коров, как правило, осеменяют искусственно. У молочного скота беременность необходима для того, чтобы вызвать физиологические изменения, обеспечивающие начало молочной продуктивности. После первой стельности молочные коровы желательно поддерживать беременными, чтобы обеспечить молочную продуктивность. У мясного скота очень важен контроль сроков наступления стельности для производства телят, особенно для пастбищного скота.
Известно, что особи крупного рогатого скота демонстрируют несколько поведенческих и физиологических характеристик, которые характерны для эстральной фазы их циклов или которые возникают очень близко к течке.
Физиологические признаки того, что у животного течка, включают усиление кровотока в репродуктивном тракте, изменения сопротивления жидкостей репродуктивного тракта, повышенную температуру тела и изменения уровня гормонов в крови.
Определение течки у животных по физиологическим признакам достаточно трудоемкий процесс, требующий наличия сложных, чувствительных инструментов, что делает систему в целом очень дорогой и, следовательно, нецелесообразной для мониторинга всех животных в очень большом стаде.
Кроме того, из-за сложности этих систем им требуется профессиональная помощь, такая как, например, ветеринарный врач, для настройки, программирования и обслуживания системы, что нецелесообразно для чрезвычайно большого числа животных.
Поэтому существует потребность в использовании дополнительных систем определения состояния половой охоты у животных. На практике широкое распространение получили методы определения состояния половой охоты по поведенческим характеристикам. Поведенческие признаки того, что у особи крупного рогатого скота течка, включают нервозность, повышенную физическую активность и подвижность, а также повышенную вокализацию (крик).
Еще одним поведенческим признаком состояния половой охоты у особей крупного рогатого скота является определенное поведение, связанное с запрыгиванием одной особи на другую. Во время течки животное чаще садится верхом на другую особь. Другой особенностью течки у крупного рогатого скота является то, что коровы в период течки позволяют садиться верхом и оставаться длительное время в контакте с другой особью. Такое поведение представляет собой брачное поведение коровы в охоте. Когда у особи крупного рогатого скота нет течки, она не позволят другой особи в стаде продолжительное время садиться на него и обязательно выйдет из-под коровы или быка, которые пытаются сесть.
Актуальной задачей в настоящее время является разработка средств, позволяющих обеспечить максимальную надежность своевременного обнаружения состояния половой охоты. Известны технические решения, в которых состояние половой охоты определяется по повышенной двигательной активности: EP2457102 (опубл. 30.05.2012, A01K29/00); EP2510783 (опубл. 17.10.2012, A01K11/00, A01K29/00); WO2017061860 (опубл. 13.04.2017, A01K11/00, A01K29/00).
Устройства мониторинга двигательной активности содержат датчики движения, которые крепятся на шею или конечность животного (ноги, хвост). Устройства, устанавливаемые на шею, измеряют общую подвижность животного, а также подвижность, связанную с процессом питания (руминационная активность) животного. Устройства, устанавливаемые на ноге, считают шаги, характеризующие подвижность животного. Данные, характеризующие подвижность животного, передаются на централизованный сервер, где обрабатываются и позволяют оператору фермы следить за состоянием поголовья. Для идентификации животного в системе применяется серийный номер устройства, установленного на животном.
Однако двигательная активность отдельных животных, находящихся в стаде, не всегда вызвана состоянием самого животного. Повышенная двигательная активность может быть следствием влияния соседних активных особей в стаде. Поведение животных в стаде синхронизируется, а потому животное может находиться в состоянии наведенной активности. По такой повышенной активности может быть сделан неверный вывод о состоянии охоты.
Известен «Метод и устройство для определения охоты у крупного рогатого скота», представленный в описании к патенту № US4846106, опубл. 07.11.1989, A61D1/08; A01K29/00. Способ и устройство для обнаружения охоты у крупного рогатого скота представляет собой электронный таймер, подключенный к переключателю. Устройство содержит цифровой дисплей для отображения числа садок на данное животное, индикатор, отображающий состояние устройства, а также прочие звуковые и световые индикаторы. Устройство помещается в специальную сумку, приспособленную для крепления к основанию хвоста коровы. Переключатель, содержащийся в устройстве, адаптирован для срабатывания под весом других коров, пытающихся взобраться на корову во время течки. Переключатель активирует устройство, чтобы предупредить владельца особи крупного рогатого скота о том, что корова в охоте. Устройство отображает информацию, как долго корова была в охоте, а также как много раз другие особи пытались совершить садки на данное животное.
Существенным недостатком этого технического решения является сложность установки датчика на основание хвоста коровы, а также фиксация его в этом положении в процессе перемещения животного. При большом количестве животных в стаде установка устройств на всех животных потребует больших материальных и временных затрат. Способ, предложенный в изобретении, не позволяет достаточно надежно определять состояния половой охоты у животных, т.к. не анализируются другие поведенческие признаки животного. Заключение о состоянии животного по одному поведенческому признаку не позволяет достоверно судить о его состоянии и может привести к ошибкам.
Известна «Система обнаружения эструса», представленная в описании к патенту №US5111799, опубл. 05.12.1992, A61B10/00. Система специально адаптирована для хирургической имплантации под шкуру в заднюю часть особи крупного рогатого скота или других животных, содержит автономный источник питания, датчик веса, контроллер, передатчик, антенну и непроницаемую для жидкости капсулу, которая окружает элементы устройства. Устройство включается, регистрируя силу, которую прилагает другое животное во время длительной садки на данное животное, находящееся в течке. Имплантируемое устройство анализирует продолжительность контакта, чтобы отличить реальное состояние охоты от более коротких ложных, которые обычно возникают в стадах крупного рогатого скота. Подсчитывается количество контактов, которые происходят в фиксированный период, например 8 часов, и частота садок сравнивается с пороговым значением, что позволяет определить необходимость фиксации течки путем передачи сигнала от имплантированного устройства.
Сигнал транслируется из подкожного участка на приемник, после чего специалист может определить состояние животного. Система позволяют выполнять полностью автоматизированное взятие и анализ эстральной жидкости. Датчик контакта животных надежно закреплен в подкожной области животного, однако установка системы достаточно трудоемка, и заключение о состоянии животного по одному поведенческому признаку не позволяет достоверно судить о его состоянии, что может привести к ошибкам.
Наиболее близким техническим решением, выбранным в качестве прототипа, является «Способ определения вероятности наступления течки», представленный в описании к международной заявке №WO2014019791. Способ основан, во-первых, на том факте, что одним из признаков наличия течки у животных, является их двигательная активность. Это, как показали исследования, напрямую связано с содержанием прогестерона в молоке и крови, поэтому наблюдение за двигательной активностью позволяет сделать первый вывод о вероятности течки. Однако, согласно изобретению, оценивается еще один параметр для тех животных, у которых была обнаружена повышенная двигательная активность в заданный промежуток времени, а именно взаимодействие с, по крайней мере, еще одним животным из группы. Такое взаимодействие животных также является признаком, характеризующим вероятность наступления течки у животного. Если зафиксирован факт взаимодействия двух и более особей, обладающих повышенной двигательной активностью, то это может означать особенно высокую вероятность течки, по крайней мере, у одного из животных.
Процедура анализа состояния животных может проводиться, например, в загоне для крупного рогатого скота, который оснащен, по крайней мере, одной, желательно несколькими видеокамерами для съемки крупного рогатого скота сверху. Выходы камер подключены к компьютерной системе обработки изображений. Система обработки изображений способна надежно распознавать каждое отдельное животное в группе животных, находящихся в загоне. Это можно сделать, например, по характерной окраске шерсти животных или нанесения узора на спине или области шеи животных, в частности в виде двумерного матричного кода. Описываются также другие, не оптические методы: например, с помощью RFID-датчиков и соответствующих датчиков, также возможно сочетание не оптических с оптическими методами. В любом случае необходимо гарантировать, что компьютеризированный блок оценки может надежно определить местонахождение каждого отдельного животного в загоне в любой момент времени.
С помощью компьютерной оценки, следующей после обработки изображений, для каждого отдельного животного группы постоянно определяется его текущая двигательная активность. По измеренным текущим значениям определяется среднее значение двигательной активности. При превышении средней двигательной активности заданного порога осуществляется отбор животного. Для выбранного животного проверяется, взаимодействовало ли оно с животными, обладающих активностью выше средней. Таким образом, для тех же животных устанавливается второй, а именно групповой параметр, который уже более заметен относительно первого параметра, связанного с двигательной активностью.
Метод обеспечивает высокую вероятность обнаружения животных, пребывающих в состоянии половой охоты. Однако, он применим только при содержании животных в помещении. Достаточно проблематично организовать видеонаблюдение животных в режиме свободного выпаса.
Задачей изобретения является разработка такого способа определения состояния половой охоты животного, который бы был применим как при содержании животных в помещении, так и в условиях свободного выпаса.
Техническим результатом является высокая надежность определения состояния половой охоты животного при различных условиях его содержания.
Решить поставленную задачу с достижением указанного технического результата позволяет заявляемый способ определения состояния половой охоты сельскохозяйственного животного в стаде, в котором так же как и в прототипе, с помощью датчика двигательной активности животного , содержащим приемопередатчик для связи с центром обработки информации, регистрируют на протяжении определенного времени двигательную активность особей сельскохозяйственных животных, выделяют животных с повышенной двигательной активностью по сравнению с регистрируемой активностью за предыдущие периоды.
Далее, в отличие от прототипа, радиолокационным методом определяют близость выделенных животных в течение определенного периода и по результатам оценки близости животных принимается решение о наличии или отсутствии состояния половой охоты у этих животных.
Высокая надежность определения состояния половой охоты животного достигается благодаря тому, что оценка состояния животного определяется по двум параметрам, один из которых – повышенная двигательная активность, а другой – близость животных, определяемый радиолокационным методом, который позволяет использовать способ при различных условиях содержания животных, как в помещении, так и условиях свободного выпаса.
Близость животных может быть оценена путем анализа затухания или задержки сигналов, распространяющихся между приёмопередатчиками, установленными на животных и/или базовыми станциями, обеспечивающими прием и передачу информации о состоянии животных.
Из уровня техники не обнаружено источников информации, раскрывающих сущность заявляемого «Способа определения состояния половой охоты сельскохозяйственного животного». Следовательно, можно констатировать о соответствии заявляемого способа критериям «новизна» и «изобретательский уровень».
Далее приводится пример конкретного осуществления «Способа определения состояния половой охоты сельскохозяйственного животного», который не охватывает и, тем более, не ограничивает весь объем притязаний данного технического решения, а является лишь иллюстрирующим материалом, подтверждающим возможность осуществления способа.
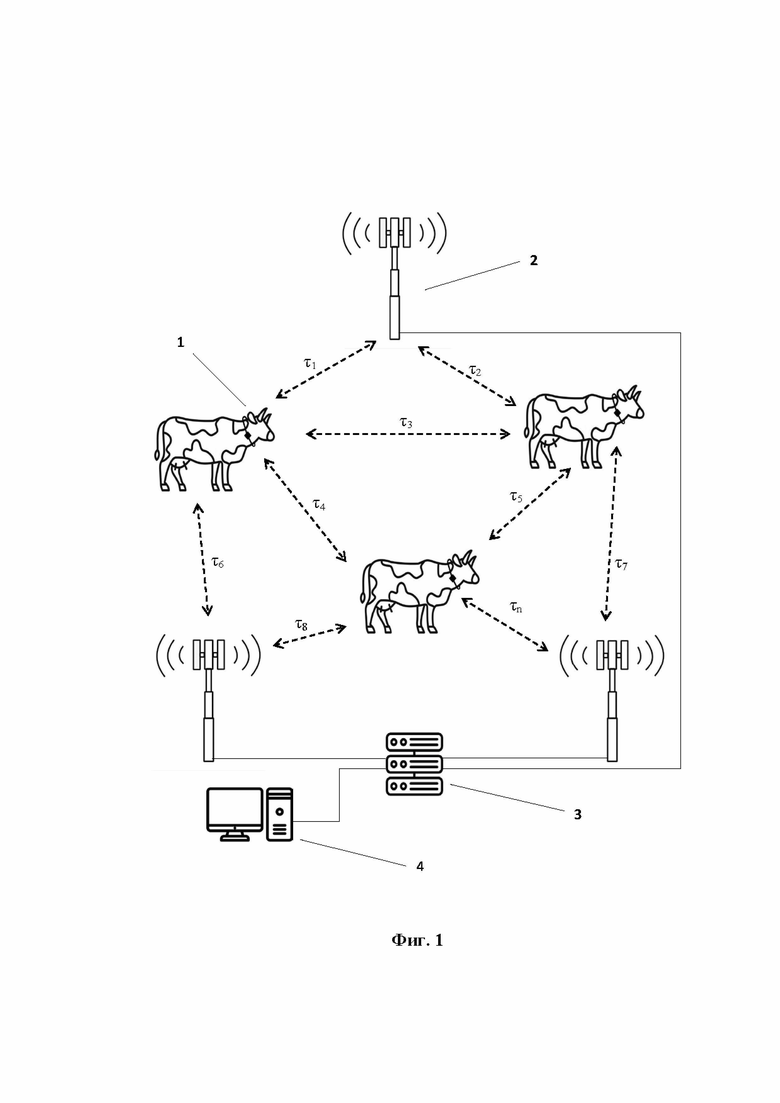
На фиг. 1 приведена функциональная схема системы мониторинга состояния активности и близости особей животных, с помощью которого осуществляется заявляемый способ.
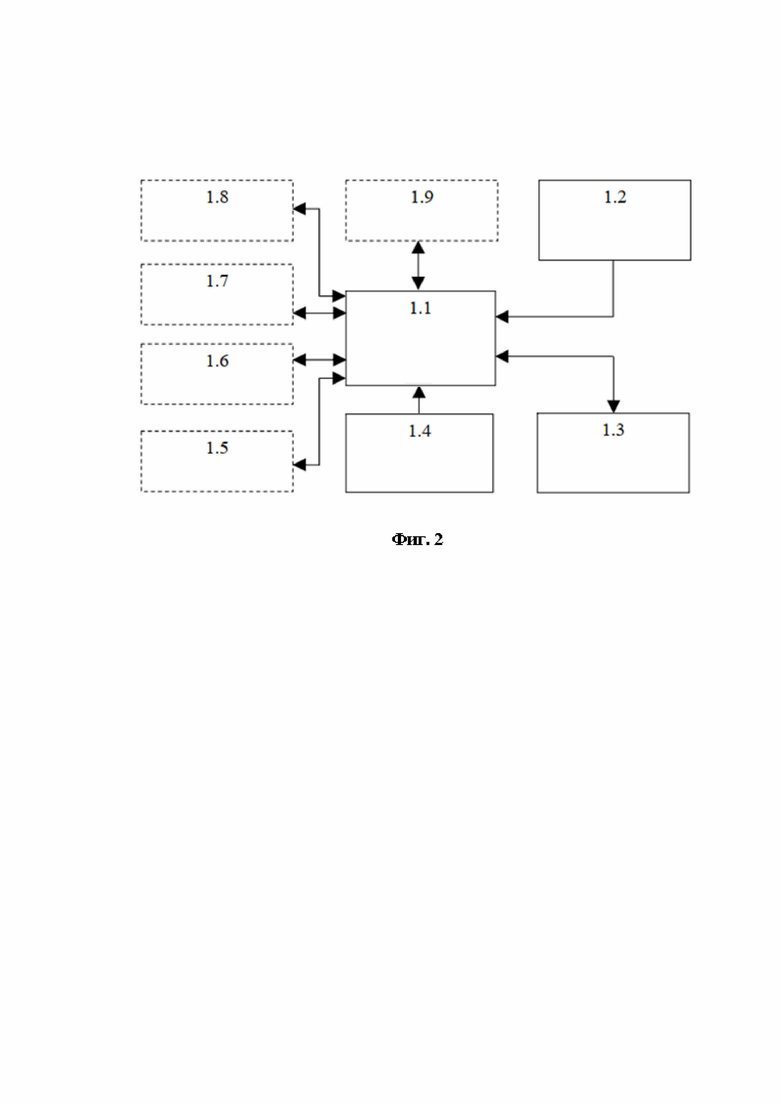
На фиг. 2 приведена структурная схема датчика двигательной активности животного.
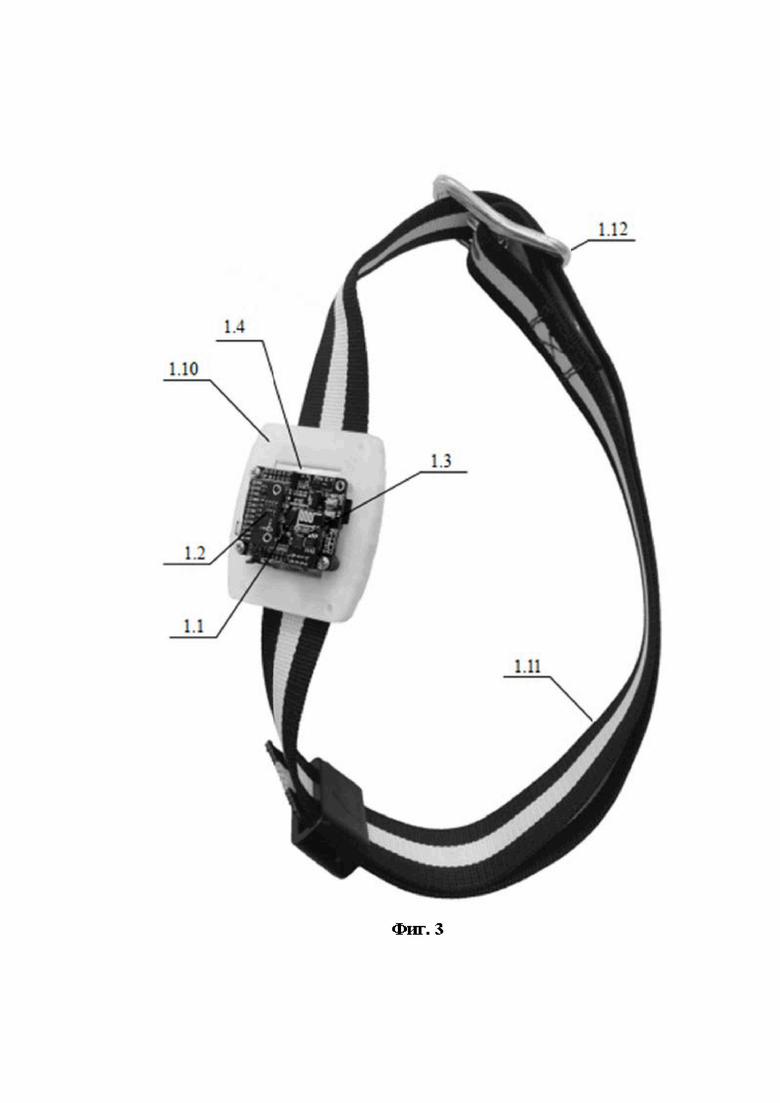
На фиг. 3 приведен общий вид конструкции датчика двигательной активности животного.
Система, представленная на фиг. 1, содержит однотипные датчики двигательной активности животного 1, способные устанавливать связь друг с другом, закрепленные при помощи ошейников на животных; три однотипных базовых станции 2, каждая из которых позволяет установить связь с датчиками двигательной активности 1, получить данные о параметрах двигательной активности животного и определить задержки τ1..τn распространения сигналов между датчиками двигательной активности 1, установленными на животных и/или базовыми станциями 2, соответственно; связанный с базовыми станциями сервер 3, на который передаются значения задержек τ1..τn, совместно с параметрами, характеризующими двигательную активность животного, а также рабочие места животновода 4, которые могут представлять собой как персональные компьютеры, так и мобильные телефоны и/или планшеты с предустановленным программным обеспечением, позволяющие анализировать информацию о стоянии стада и предпринимать необходимые действия.
В других вариантах реализации системы вместо параметров τ1..τn, характеризующих взаимные расстояния между особями животных, а также между животными и базовыми станциями 2, могут быть использованы значения затухания сигналов A1..An или комбинация значений задержки распространения сигналов и их затухания.
Обобщенная структурная схема датчика двигательной активности животного 1, представленная фиг. 2, включает в себя как функционально необходимые элементы (показаны сплошной линией), так и дополнительные элементы, позволяющие расширить функциональные возможности системы мониторинга (показаны штриховой линией).
Ядром системы является микроконтроллер 1.1, соединенный с акселерометром 1.2, радиомодулем 1.3 дальней связи и блоком питания 1.4, а также вспомогательными периферийными узлами системы 1.5-1.9. В функции микроконтроллера входит считывание показаний ускорения устройства по трем координатам, запись параметров ускорения во встроенную оперативную память и/или энергонезависимую память 1.7, цифровая обработка зарегистрированных сигналов, выделение характерных частот и амплитуд активности животного, передача выделенных показателей активности посредством радиомодуля 1.3 дальней связи на сервер 3. В качестве микроконтроллера 1.1 может использоваться, например, STM32L100RBT6.
Акселерометр 1.2 предназначен для преобразования сигналов ускорения датчика двигательной активности 1 в цифровой код и передачи кодовых последовательностей по цифровым интерфейсам связи на микроконтроллер 1.1. Для этих целей может быть использован, например, акселерометр LIS2DW12 производства STMicroelectronics.
Радиомодуль 1.3 дальней связи, подключенный к микроконтроллеру 1.1, предназначен для организации сеансов радиосвязи с приемопередатчиками базовых станций 2, находящимися в зоне покрытия радиомодуля, передачи информации об активности животного, а также измерения и передачи информации о расстояниях между датчиками двигательной активности 1, установленными на животных, а также датчиками двигательной активности 1, установленными на животных и базовыми станциями 2. Оценка расстояния (близости) может выполняться при помощи одного из следующих алгоритмов или их сочетания: ToA (time of arrival), TDoA (time difference of arrival), ToF (time of flight), TWR (two-way ranging), RSSI (received signal strength indicator).
Блок питания 1.4 обеспечивает автономное функционирование устройства на протяжении всего срока эксплуатации. Для работы устройства в течение 5 лет в данном конкретном примере реализации может использована батарея с номинальным выходным напряжением 3,7 В и емкостью 2000 мА·ч.
Перечисленные функционально необходимые элементы структурной схемы обеспечивают базовые требования к функциональным характеристикам системы, а именно: долговременное автономное считывание показателей активности животного, передачу сигналов на узел обработки системы мониторинга и определение взаимного расстояния между особями животных и/или животными и базовыми станциями 2.
В других вариантах практической реализации датчика двигательной
активности 1 животного могут быть дополнены:
• блоком 1.5 передачи данных IrDA в инфракрасном диапазоне длин волн, предназначенным для запроса идентификационного номера устройства в системах контроля доступа животного, поильниках, системах автоматического доения и др.
• радиомодулем 1.6. ближней радиосвязи, который является функциональным аналогом интерфейса IrDA. Преимуществом, по отношению к интерфейсу IrDA, является то, что для считывания показаний не обязательно обеспечение прямой оптической видимости между считывателем и датчиком двигательной активности. Это означает, что при использовании радиомодулей ближней связи отпадает необходимость в специальной ориентации устройства на шее животного. В качестве интерфейсов ближней связи могут быть использованы интерфейсы Bluetooth, NFC или другие интерфейсы.
• энергонезависимая память 1.7 предназначена для записи и долговременного хранения данных ускорения животного по трем координатам, может быть использована для отработки и совершенствования алгоритмов определения конечных состояний и движений животного по временным зависимостям ускорений датчика двигательной активности в пространстве.
• приемные модули систем глобального позиционирования 1.8 могут быть использованы для привязки положения некоторых животных из стада к глобальной системе координат для обеспечения локализации особей. В качестве таких модулей могут использоваться стандартные ГЛОНАСС, GPS, GALILEO, COMPASS, SBAS модули, например: NV08C-CSM.
• модуль индикации 1.9 предназначен для отображения режимов работы устройства и состояния животного, в простейшем варианте исполнения может представлять собой светодиод, частота мерцания или цвет которого соответствует определенному режиму работы устройства или состоянию животного. Для его функционирования в корпусе устройства может быть выполнено прозрачное окошко.
На фиг. 3 показан пример общего вида конструкции датчика двигательной активности 1 состояния животного. Устройство включает в себя корпус 1.10, внутри которого размещен печатный узел, с установленными на нем микроконтроллером 1.1, акселерометром 1.2, радиомодулем 1.3 дальней связи и батареей питания 1.4. Через отверстие с обратной стороны корпуса устройства 1 пропущен ошейник 1.11, который закрепляется на шее животного с помощью пряжки 1.12.
Способ определения состояния половой охоты сельскохозяйственного животного в стаде осуществляется с помощью системы, представленной на фиг. 1 следующим образом:
1) на каждую особь животного в стаде устанавливается датчик двигательной активности 1;
2) на всей области наблюдения за животными устанавливаются базовые станции 2, подключенные к серверу 3. Причем положение базовых станций задается таким образом, чтобы обеспечить зону покрытия радиосвязи, обеспечивающую, при любом положении животного в области наблюдения, связь датчиков двигательной активности 1 животного с по меньшей мере одной базовой станцией;
3) датчики двигательной активности 1 по встроенной программе в микроконтроллере 1.1 осуществляют регистрацию характеристик ускорения, сохраняют данные в оперативную или энергонезависимую память 1.7, выполняют цифровую обработку зарегистрированных сигналов;
4) датчики двигательной активности 1 по встроенной программе в микроконтроллере 1.1 определяют задержку распространения сигналов между каждым из датчиков двигательной активности 1 и аналогичным соседним датчиком 1 и/или базовой станцией 2;
5) датчики двигательной активности 1 осуществляют передачу показателей активности и взаимных задержек посредством радиомодуля 1.3 на сервер 3 через базовые станции 2;
6) сервер 3 получает информацию об активности животного и задержках распространения сигналов с каждого датчика двигательной активности через базовые станции 2;
7) рабочие места животноводов 4 через встроенное программное обеспечение позволяют получить информацию о стоянии стада и конкретных особей с сервера 3 и представить ее в наглядном виде для анализа и принятия решений.
С помощью компьютерной оценки и последующей обработки полученных данных для каждого отдельного животного группы постоянно определяется его средняя двигательная активность за определенный временной интервал. В случае, когда значение, характеризующее двигательную активность животного, превышает заданный порог, производится отбор соответствующих животных для дальнейшей оценки. Коэффициент, на который текущее значение средней двигательной активности должно быть превышено в сравнении с более ранним средним значением двигательной активности, может варьироваться от 10% до 25% средней двигательной активности. Предпочтительно, чтобы коэффициент был выбран настолько высоким, чтобы случайное превышение предельного значения не привело к отбору. Поэтому при выборе предельного значения следует учитывать и случайные отклонения, то есть «основной шум» средней двигательной активности. Чем меньше этот основной шум, тем меньше может быть установлено предельное значение, с которого происходит отбор животного.
После отбора животного, у которого среднее значение двигательной активности было выше порогового значения в течение определенного периода времени, проверяется, взаимодействовало ли оно с другими животными, у которых также была зарегистрирована повышенная относительно предыдущих периодов двигательная активность: поскольку решающим фактором может быть расстояние от конкретного животного до другого аналогичного животного в соответствующий период времени, определяется расстояние между описанными животными. При первом приближении можно задать значение расстояния, а затем установить параметр, специфичный для рассматриваемых животных. В рамках более точной оценки можно дополнительно учитывать время, в течение которого животные находились в непосредственной близости друг от друга. Таким образом, для тех же животных устанавливается второй, а именно групповой параметр, который уже положительно заметен при первом параметре, направленном на двигательную активность.
Далее представлены этапы алгоритма работы системы.
1. Вблизи зоны пребывания животных устанавливаются базовые станции (по меньшей мере одна). Настраиваются параметры сбора и обработки информации.
2. Датчики двигательной активности 1 устанавливаются на животных. Настраиваются параметры сбора и обработки информации об активности животных и их взаимном расположении (задержке), регулярность передачи информации в эфир.
3. Каждый из датчиков двигательной активности 1 накапливает информацию об активности животного и в заданные временные интервалы отправляет в эфир данную информацию, а затем переходит в режим ожидания.
4. В режиме ожидания каждый из датчиков двигательной активности 1 и/или базовых станций 2 принимает широковещательные сообщения от соседних датчиков двигательной активности 1 и/или базовых станций 2. На основании полученных данных анализируется информация о соседних особях, их активности, взаимном расстоянии между соседними животными и/или животными и базовыми станциями 2.
6. Информация, полученная базовыми станциями 2 от датчиков двигательной активности 1 в зоне действия станций, передается на сервер 3, где на основе полученных данных делается вывод о состоянии животных, взаимных расстояний между ними.
7. Полученная информация отображается пользователю посредствам рабочих мест животноводов 4.
Полученная информация может использоваться для:
- определения состояния здоровья животного по косвенным признакам его активности, с учетом влияния соседних особей на характеристики активности, в т.ч. присутствие вблизи базовых станций 2, которые могут быть установлены вблизи мест питания, дойки и т.д.;
- обеспечения возможности локализации интересующих особей.
Предлагаемый способ позволит исключить состояние «ложной охоты», когда активные особи, находящиеся в охоте, косвенно влияют на остальных, повышая их активность.
Для определения взаимного влияния особей нет необходимости в определении координат животных (с помощью триангуляции или трилатерации). Достаточно одной базовой станции и/или наличия, по крайней мере, двух датчиков двигательной активности 1, установленных на животных.
Таким образом, заявляемое изобретение позволит при его использовании определять с высокой степенью надежности состояние половой охоты сельскохозяйственного животного.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования приживляемости эмбриона у коровы-реципиента в процессе проведения технологии трансплантации эмбрионов | 2019 |
|
RU2703104C2 |
| СИСТЕМА КОНТРОЛЯ ФИЗИОЛОГИЧЕСКОГО СОСТОЯНИЯ ЖИВОТНЫХ | 2019 |
|
RU2768739C1 |
| Способ отбора коров-реципиентов в процессе проведения технологии трансплантации эмбрионов | 2019 |
|
RU2703943C2 |
| СПОСОБ ОБНАРУЖЕНИЯ | 2010 |
|
RU2557717C2 |
| Способ синхронизации полового цикла коров | 2022 |
|
RU2804945C1 |
| Сеть данных для отслеживания животных | 2015 |
|
RU2680707C2 |
| СПОСОБ ЛЕЧЕНИЯ БЕСПЛОДИЯ У КОРОВ | 1994 |
|
RU2067881C1 |
| СПОСОБ ПОВЫШЕНИЯ ВОСПРОИЗВОДИТЕЛЬНЫХ СПОСОБНОСТЕЙ КОРОВ | 2015 |
|
RU2583630C1 |
| СПОСОБ ПРОВЕДЕНИЯ МЕЗАТОНОВОЙ ПРОБЫ | 2011 |
|
RU2491957C2 |
| СПОСОБ СТИМУЛЯЦИИ РЕПРОДУКТИВНОЙ ФУНКЦИИ КОРОВ | 1992 |
|
RU2038780C1 |
Изобретение относится к области животноводства, а именно к системам для автоматического отслеживания поведения отдельных животных в стаде для выявления наиболее благоприятного времени для их оплодотворения, преимущественно искусственного. Способ определения состояния половой охоты сельскохозяйственного животного характеризуется тем, что животное снабжено датчиком двигательной активности, содержащим приемопередатчик для связи с центром обработки информации. Способ включает этапы, на которых регистрируют на протяжении времени двигательную активность каждой особи сельскохозяйственного животного в стаде, выделяют животных с повышенной двигательной активностью по сравнению с регистрируемой активностью за предыдущие периоды, радиолокационным методом определяют взаимную близость выделенных животных в течение определенного периода путем анализа затухания или задержки сигналов, распространяющихся между приёмопередатчиками, установленными на животных. По результатам оценки взаимной близости и двигательной активности животных принимается решение о состоянии охоты этих животных. Изобретение обеспечивает высокую надежность определения состояния половой охоты животного при различных условиях его содержания, как в помещении, так и в условиях свободного выпаса. 3 ил.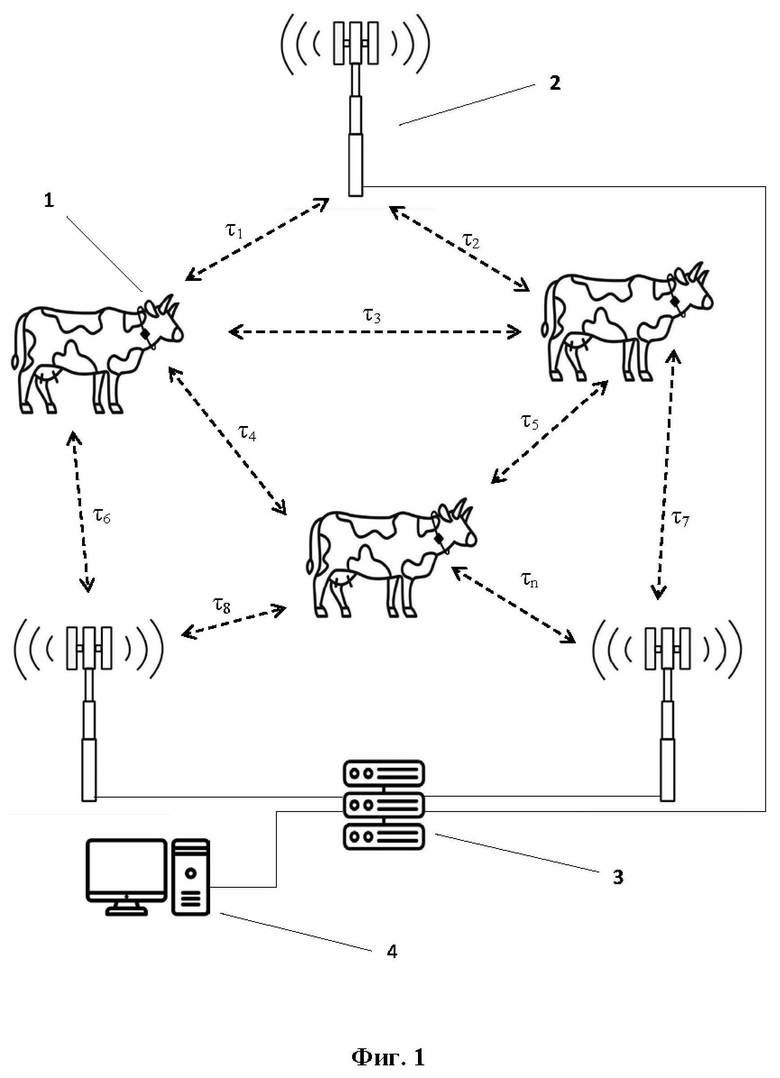
Способ определения состояния половой охоты сельскохозяйственного животного, снабженного датчиком двигательной активности, содержащим приемопередатчик для связи с центром обработки информации, включающий этапы, на которых:
- регистрируют на протяжении времени двигательную активность каждой особи сельскохозяйственного животного в стаде;
- выделяют животных с повышенной двигательной активностью по сравнению с регистрируемой активностью за предыдущие периоды;
- радиолокационным методом определяют взаимную близость выделенных животных в течение определенного периода путем анализа затухания или задержки сигналов, распространяющихся между приёмопередатчиками, установленными на животных;
- по результатам оценки взаимной близости и двигательной активности животных принимается решение о состоянии охоты этих животных.
| WO 2019161318 A1, 22.08.2019 | |||
| US 20200267936 A1, 27.08.2020 | |||
| WO 2014019791 A1, 06.02.2014 | |||
| Сеть данных для отслеживания животных | 2015 |
|
RU2680707C2 |
| US 10667496 B2, 02.06.2020 | |||
| EP 3637348 A4, 10.06.2020 | |||
| CN 111067484 A, 28.04.2020 | |||
| WO 2018109725 A1, 21.06.2018 | |||
| WO 2018060524 A1, 05.04.2018 | |||
| Шахтная сушилка | 1938 |
|
SU57110A1 |

