Группа изобретений относится к неинвазивным методам лечения височно-нижнечелюстных расстройств, в частности к моделированию твердотельной поверхности ортотика, и может быть применена в медицинской промышленности.
Известен способ определения терапевтического положения нижней челюсти при повышенной стираемости зубов, который включает получение моделей челюстей из гипса, миорелаксацию жевательных и шейных мышц методом чрескожной электронейростимуляции, определение межальвеолярной высоты и положения нижней челюсти под контролем электромиографии и гнатографии с помощью силиконового регистрата, фиксацию моделей челюстей в артикуляторе согласно данным лицевой дуги и ранее полученного регистрата, восковое моделирование жевательной поверхности стершихся зубов, получение оттиска с зубного ряда после воскового моделирования с использованием прозрачной силиконовой массы и на основании полученного силиконового оттиска создание композитной реставрации жевательной поверхности зубов [RU 2737584, дата публикации: 01.12.2020 г. МПК: A61C 5/00].
Недостатком известного технического решения является низкая автоматизация процессов моделирования жевательной поверхности стершихся зубов, вследствие чего известное техническое решение имеет недостаточно высокую эффективность.
Известен способ моделирования движения верхней и нижней челюсти и система для его реализации, которые включают размещение пластины с оттискным материалом с обеих сторон в межчелюстном пространстве, затем после временной окклюзии формирование оттиска, который сканируется прибором для измерения 3D-формы и перенаправлением результатов в блок моделирования, который формирует 3D-модель, на которую накладываются данные о движении челюсти пациента, полученные с датчиков движения, установленных на верхней и нижней челюсти [US 2015289960A1, дата публикации: 15.10.2015 г. МПК: A61B 5/00; A61B 5/107; A61B 5/11].
Преимуществом известного технического решения является его более высокая эффективность, которая обусловлена автоматизацией процессов моделирования 3D формы оттиска и наложением на модель данных, полученных с датчиков движения челюсти пациента. Однако недостатком известного технического решения по-прежнему остается его низкая эффективность, поскольку полученная модель с имеющимися данными не учитывает относительного положения челюстей.
В качестве прототипа выбран способ автоматизированного моделирования ортотика для лечения прикуса и система для его реализации, при этом способ включает получение 3D-модели верхней и нижней челюстей при помощи интраоральной 3D-камеры, расположение 3D-моделей в окклюзивном положении относительного друг друга, интеграцию 3D-моделей в виртуальную модель артикулятора, которая имитирует вращательное, горизонтально-поступательное, вертикально поступательное и боковое движение височно-нижнечелюстного сустава и создание 3D-модели ортотика с использованием 3D-моделей челюстей и моделируемой траектории движения нижней челюсти относительно верхней челюсти из модели артикулятора на персональном компьютере [US 2020275995A1, дата публикации: 03.09.2020 г. МПК: A61C 11/00].
Преимуществом прототипа перед известным техническим решением является более высокое качество полученной трехмерной модели ортотика за счет применения в нем виртуального артикулятора, который позволяет наиболее точно выставить относительное положение челюстей.
Однако недостатком прототипа является то, что при моделировании виртуального артикулятора височно-нижнечелюстные суставы (ВНЧС) на самом деле не занимают положения центрального отношения, поскольку при окклюзионных нарушениях баланс напряжений на окклюзионных контактах с левой и правой стороны находится в неуравновешенном состоянии, а жевательные мышцы находятся в гипертонусе. Это ведет к тому, что челюсти пациента находятся в положении максимальной интерскупидации, т.е. в естественном прикусе , а при имитации следящим артикулятором движения нижней челюсти, траектория вращательных и поступательных движений всех компонентов сборки (суставных головок, суставных ямок, моделей зубов верхней и нижней челюсти) задается неверно. Это приводит к неточностям графической трассировки статических и динамических окклюзионных контактов и к ошибкам в расчетах параметра высоты разобщения вершин контактных бугорков верхней челюсти с окклюзионной поверхностью нижней челюсти в положении центрального соотношения, а также параметра угла наклона и длины траектории смещения каждой индикаторной точки при имитации виртуальным артикулятором экскурсионных движений нижней челюсти. Вследствие этого недостатка существенным образом снижается точность полученной модели ортотика и ухудшается качество процесса его автоматизированного моделирования.
Техническая проблема, на решение которой направлена группа изобретений, заключается в повышении качества автоматизированного моделирования ортотика.
Технический результат, на достижение которого направлена группа изобретений, заключается в повышении точности полученной модели ортотика.
Дополнительный технический результат, на достижение которого направлена группа изобретений, заключается повышении точности моделирования окклюзионной поверхности ортотика.
Дополнительный технический результат, на достижение которого направлена группа изобретений, заключается в повышении точности моделирования следящего виртуального артикулятора.
Дополнительный технический результат, на достижение которого направлена группа изобретений, заключается в обеспечении возможности графической трассировки статических и динамических окклюзионных контактов устройством обработки данных.
Сущность первого изобретения из группы изобретений заключается в следующем.
Способ автоматизированного моделирования ортотика включает установку пациенту средства отслеживания движения челюсти, моделирование следящего виртуального артикулятора на основе данных, полученных средством отслеживания движения челюсти и моделирование ортотика на основе следящего виртуального артикулятора. В отличие от прототипа перед установкой средства отслеживания движения челюсти пациенту осуществляют установку депрограммирующей окклюзионной шины.
Сущность второго изобретения из группы изобретений заключается в следующем.
Система автоматизированного моделирования ортотика включает устройство обработки данных, выполненное с возможностью моделирования виртуального артикулятора, и подключенное к нему средство отслеживания движения челюсти. В отличие от прототипа система дополнительно содержит депрограммирующую окклюзионную шину.
Сущность третьего изобретения из группы изобретений заключается в следующем.
Средство отслеживания движения челюсти системы автоматизированного моделирования ортотика в отличие от прототипа выполнено в виде депрограммирующей окклюзионной шины с реперными точками.
Система автоматизированного моделирования ортотика обеспечивает возможность получения посредством электронного устройства или программно-аппаратного комплекса, с установленным на него программным обеспечением для автоматизированного проектирования, твердотельной поверхности ортотика.
Депрограммирующая окклюзионная шина уравновешивает баланс напряжений на окклюзионных контактах с левой и правой стороны, снижает гиперактивный тонус жевательных мышц, устанавливает височно-нижнечелюстные суставы (ВНЧС) в положение центрального отношения и уменьшает выраженность симптомов мышечной боли. Депрограммирующая окклюзионная шина имеет поверхность, обеспечивающую возможность надежного закрепления на зубном ряду нижней челюсти пациента, для чего эта поверхность может в точности повторять контуры поверхности зубного ряда.
Также депрограммирующая окклюзионная шина может состоять из двух элементов, один из которых предназначен для установки на нижнюю челюсть, а другой предназначен для установки на верхнюю челюсть, которые имеют соответствующие поверхности для установки. Такая конструкция обеспечивает возможность получения данных для моделирования ортотика при полной или частичной адентии у пациента.
Депрограммирующая окклюзионная шина имеет одиночный окклюзионный контакт в области центральных резцов челюстей и обеспечивает ротацию нижней челюсти вокруг этого контакта. Одновременно с этим она обеспечивает высвобождение окклюзионных помех на остальных зубах, например, окклюзионного зазора в области жевательных зубов, который должен составлять 1,5-2,5 мм. При этом для повышения точности полученной модели ортотика установку депрограммирующей окклюзионной шины пациенту осуществляют не менее чем на 1 час. В наиболее предпочтительном варианте установку депрограммирующей окклюзионной шины пациенту осуществляют на 4-12 часов. В результате этого снимается мышечное напряжение, жевательные мышцы временно расслабляются, а суставные головки занимают естественное положение в суставных ямках, что позволяет задать терапевтическое положение суставных головок.
Средство отслеживания движения челюсти обеспечивает возможность получения данных терапевтического положения верхней и нижней челюсти в положении центрального отношения и может быть представлено в виде пластины для нижней челюсти или индивидуальных параокклюзионных вилок для верхней и нижней челюстей, и устройством слежения за их перемещением. Пластина и каждая индивидуальная параокклюзионная вилка снабжена элементом контроля перемещения, который может быть представлен в виде датчика перемещения, основанного на принципе гироскопа или трекера, однако в наиболее предпочтительном варианте он может быть представлен в виде реперных точек, представленных в виде графических или оптических меток, расположенных на наружной части пластины и каждой вилки.
Устройство слежения обеспечивает возможность получения данных пространственного положения нижней челюсти относительно верхней челюсти. Устройство слежения, в зависимости от вида применяемого элемента контроля перемещения, может быть представлено в виде блока сбора данных от датчиков перемещения, однако в наиболее предпочтительном варианте оно представлено в виде сканера, обеспечивающего возможность регистрации трехмерных координат положения реперных точек и передающего данные в устройство обработки данных.
Депрограммирующая окклюзионная шина может быть представлена в виде средства отслеживания движения челюсти, для чего она может быть снабжена элементом контроля перемещения, либо для этого депрограммирующая окклюзионная шина может быть разъемно или неразъемно закреплена на пластине или параокклюзионной вилке для нижней челюсти, для чего они могут содержать выемку или углубление, либо депрограммирующая окклюзионная шина может быть частью параокклюзионной вилки для нижней челюсти. При этом углубление или выемка для закрепления шины, либо сама шина расположены на поверхности пластины или параокклюзионной вилки, соприкасающейся с зубным рядом. При этом в случае использования депрограммирующей окклюзионной шины, закрепленной или являющейся частью параокклюзионной вилки для нижней челюсти, предпочтительно применение вилки для нижней челюсти в паре с параокклюзионной вилкой для верхней челюсти. При этом в наиболее предпочтительном варианте депрограммирующая окклюзионная шина снабжена реперными точками на наружной поверхности, а для регистрации положения реперных точек используется устройство слежения в виде сканера, обеспечивающего возможность регистрации трехмерных координат положения реперных точек, и передающего данные в устройство обработки данных.
Виртуальный артикулятор представляет собой программный инструмент, обеспечивающий возможность манипулирования трехмерными изображениями анатомического участка с целью измерения результатов и разработки цифровых моделей окклюзионных устройств.
Для воссоздания в виртуальном артикуляторе траектории движения нижней челюсти относительно терминальной шарнирной оси височно-нижнечелюстного сустава используют средство отслеживания движения челюсти.
На основе полученных данных обеспечивается возможность анализа сложного движения нижней челюсти, для которой необходимо рассчитать траекторию перемещения точки относительно подвижной системы координат - которая, в свою очередь, движется относительно неподвижной системы координат. В таком случае неподвижную систему координат привязывают к системе отсчета средства отслеживания движения челюсти, а подвижную систему координат привязывают к терминальной шарнирной оси и одной из анатомических плоскостей пациента, например, к Франкфуртской анатомической плоскости верхней и нижней челюсти в координатах подвижной системы координат и воссоздании траектории кинематической оси нижней челюсти относительно терминальной шарнирной оси.
После этого данные преобразуют в облако точек, а подвижные координаты приводят к единой точке отсчета. Поскольку, подвижная система координат привязана к терминальной шарнирной оси и Франкфуртской анатомической плоскости то ее выравнивают с координатами верхней челюсти в положении центрального отношения. На этом же шаге по координатам нижней челюсти выравнивают ключевые точки траектории кинематической оси относительно верхней челюсти, т.е. относительно терминальной шарнирной оси и Франкфуртской плоскости.
Для моделирования следящего виртуального артикулятора используют устройство обработки данных, на вход которого отправляют данные трехмерной геометрии анатомических компонентов сборки (мыщелков, гленоидных ямок, зубных рядов верхней и нижней челюсти), траектории движения нижней челюсти и суставных головок, терапевтическое положение верхней и нижней челюсти в положении центрального отношения, полученного посредством депрограммирующей окклюзионной шины.
Основной функцией следящего виртуального артикулятора является возможность изменения координат окклюзионных контактов и получения на основе этих данных графической трассировки челюсти при расслабленном мышечном тонусе, которую впоследствии используют для построения окклюзионной поверхности ортотика. При этом для повышения точности и наглядности модели виртуального артикулятора ее разрабатывают с использованием метода реверсного инжиниринга, когда отдельные медицинские компьютерные изображения костных тканей преобразуют в модели твердого тела.
Составной частью следящего виртуального артикулятора является виртуальная лицевая дуга, которая работает как анализатор движения челюсти. Виртуальная лицевая дуга представляет собой программный инструмент, обеспечивающий возможность выравнивания цифровых слепков верхней и нижней челюсти в виртуальном артикуляторе относительно анатомии пациента и координат терминальной шарнирной оси. На основе имеющихся данных она обеспечивает возможность получения траектории движения мыщелков ВНЧС, начиная от положения центрального отношения, полученного посредством депрограммирующей окклюзионной шины, - к максимальному открытию рта - к закрытию рта - к положению центрального отношения, что существеннным образом повышает точность моделирования виртуального артикулятора и ортотика. Этот инструмент определяет пространственное положение нижней челюсти относительно суставов, а также регистрирует траектории вращательных и поступательных движений всех компонентов сборки (суставных головок, суставных ямок, моделей зубов верхней и нижней челюсти) во всех имеющихся степенях свободы и переносит эти движения в единую систему отсчета. Данные для этого получают за счет средства отслеживания движения челюсти.
Модель следящего виртуального артикулятора с полученной виртуальной лицевой дугой обеспечивает возможность получения анатомически точной визуализации движения челюсти и выполнения посредством устройства обработки данных графической трассировки статических и динамических окклюзионных контактов, которые позволяют с высокой точностью смоделировать ортотик. Это происходит за счет того, что реальная специфическая для пациента мыщелковая позиция может отображаться в трехмерном объеме, диапазоны всех движений суставных головок легко регистрироваться и оцениваться. Изменения в зазоре между мыщелком и ямкой можно измерить во время движений или в положении покоя.
Моделирование ортотика, в частности ее окклюзионной поверхности осуществляют посредством устройства обработки данных на основе полученного следящего виртуального артикулятора, что обеспечивает возможность при моделировании окклюзионной поверхности ортотика получить параметры высоты разобщения вершин контактных бугорков верхней челюсти с окклюзионной поверхностью нижней челюсти в положении центрального отношения, полученного посредством депрограммирующей окклюзионной шины, а также параметр угла наклона и длины траектории смещения каждой индикаторной точки при имитации виртуальным артикулятором экскурсионных движений нижней челюсти, позволяя повысить точность полученной модели ортотика.
Процесс моделирования окклюзионной поверхности ортотика начинают с инициализации траектории перемещения индикаторных точек. Эти траектории возвращаются следящим виртуальным артикулятором в процессе имитации экскурсионных движений нижней челюсти. Алгоритм перемещает вдоль вертикальной оси ключевые точки образующих кривых поверхности базиса, пересекающих поверхность опорных зубов верхней челюсти, на границу поверхности зубного ряда. Затем следует изменение направления каждого касательного вектора в ключевых точках параллельно траекториям экскурсионных движений.
Таким образом, создается гладкая окклюзионная поверхность ортотика для плавного смещения опорных бугорков в терапевтическое положение, другими словами - для принудительной мягкой посадки суставных головок в заданные координаты.
Группа изобретений может быть выполнена из известных материалов с помощью известных средств, что свидетельствует о ее соответствии критерию патентоспособности «промышленная применимость».
Группа изобретений характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что перед установкой средства отслеживания движения челюсти пациенту осуществляют установку депрограммирующей окклюзионной шины за счет чего уравновешивается баланс напряжений на окклюзионных контактах с левой и правой стороны, снижается гиперактивный тонус жевательных мышц, а височно-нижнечелюстные суставы (ВНЧС) устанавливаются в положение центрального отношения.
В результате этого снимается мышечное напряжение, жевательные мышцы временно расслабляются а суставные головки занимают естественное положение в суставных ямках, что позволяет задать терапевтическое положение суставных головок и при моделировании следящего виртуального артикулятора более точно регистрировать траектории вращательных и поступательных движений всех компонентов сборки (суставных головок, суставных ямок, моделей зубов верхней и нижней челюсти) во всех имеющихся степенях свободы и выполнить на основе более точных данных графическую трассировку статических и динамических окклюзионных контактов.
За счет этого при моделировании окклюзионной поверхности ортотика обеспечивается возможность получения более точных параметров высоты разобщения вершин контактных бугорков верхней челюсти с окклюзионной поверхностью нижней челюсти в положении центрального соотношения, а также параметр угла наклона и длины траектории смещения каждой индикаторной точки при имитации виртуальным артикулятором экскурсионных движений нижней челюсти, которые позволяют с высокой точностью смоделировать окклюзионную поверхность ортотика.
После осуществления процесса автоматизированного моделирования ортотика он может быть изготовлен посредством применения аддитивной технологии, методом механической обработки, к примеру фрезерованием, либо методом литья путем заполнения жидким материалом полости заданных форм и размеров с последующим затвердеванием.
Благодаря этому обеспечивается достижение технического результата, заключающегося в повышении точности полученной модели ортотика, тем самым повышается качество автоматизированного моделирования ортотика.
Группа изобретений характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о ее соответствии критерию патентоспособности «новизна».
Существенные признаки группы изобретений обеспечивают возможность достижения неизвестного и неочевидного эффекта, заключающегося в существенном повышении точности моделирования ортотика за счет того, что депрограммирующая окклюзионная шина позволяет установить височно-нижнечелюстные суставы (ВНЧС) в положение центрального отношения, вследствие чего следящий виртуальный артикулятор учитывает эти данные при имитации движения нижней челюсти.
Ввиду этого группа изобретений соответствует критерию патентоспособности «изобретательский уровень».
Изобретения из группы изобретений связаны между собой и образуют единый изобретательский замысел, который заключается в том, что способ автоматизированного моделирования ортотика, выполняется системой автоматизированного моделирования ортотика, при этом средство отслеживания движения челюсти является частью системы автоматизированного моделирования ортотика, что свидетельствует о соответствии группы изобретений критерию патентоспособности «единство изобретения».
Группа изобретений поясняется следующими фигурами.
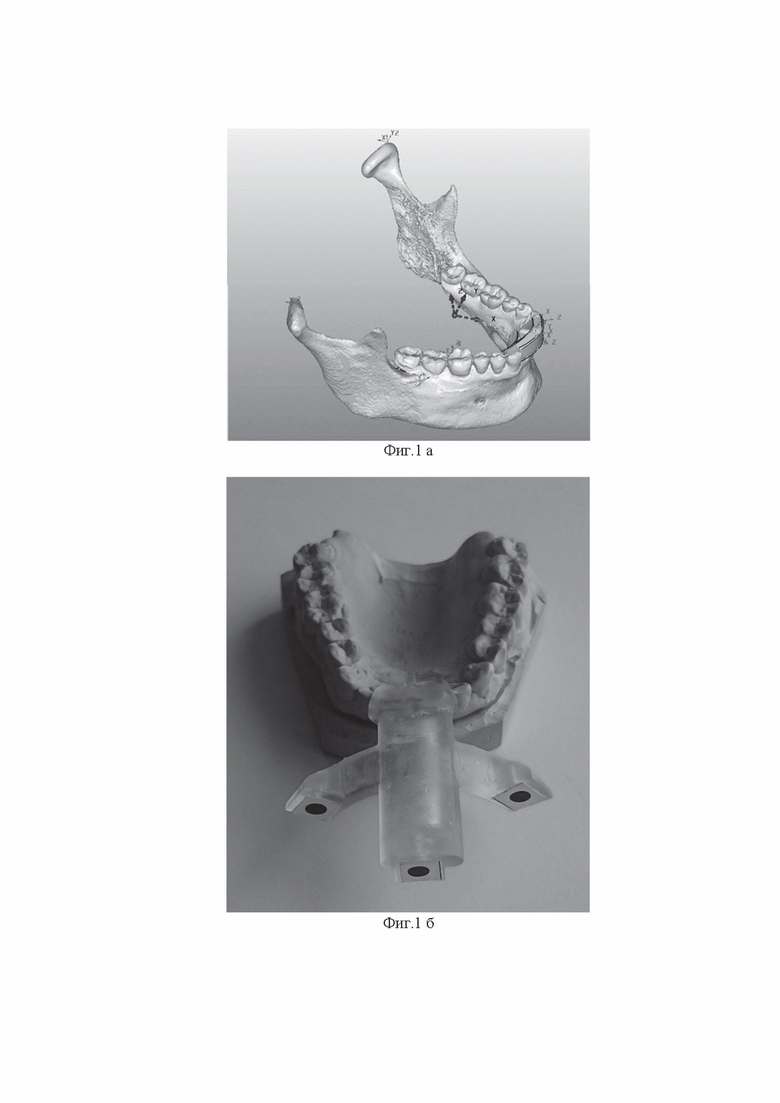
Фиг. 1а - Модель нижней челюсти с установленной на резцах депрограммирующей окклюзионной шиной.
Фиг. 1б - Слепок верхней челюсти с установленной на резцах депрограммирующей окклюзионной шиной, имеющей реперные точки.
Фиг. 1в - Модель нижней челюсти с установленной на резцах депрограммирующей окклюзионной шиной, имеющей реперные точки.
Фиг. 2 - Получение цифровых изображений слепков в формате триангулированной модели (STL).
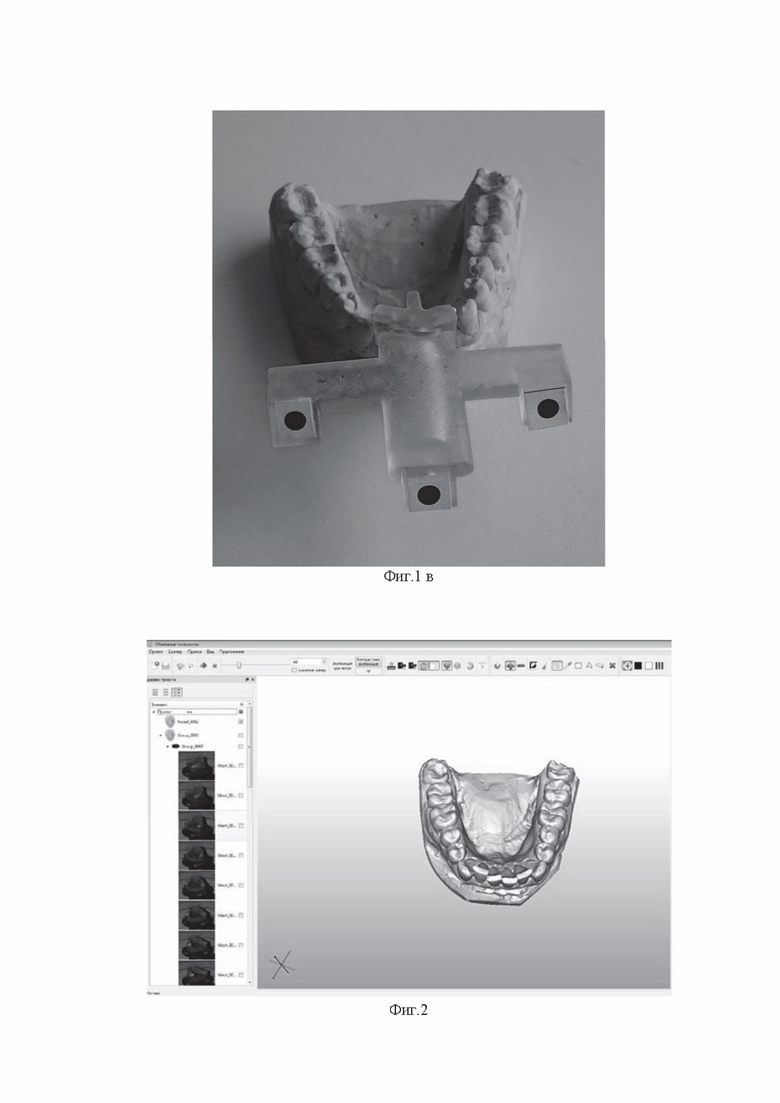
Фиг. 3 - Обработка файлов DICOM, сегментация анатомии и получение 3D изображения.
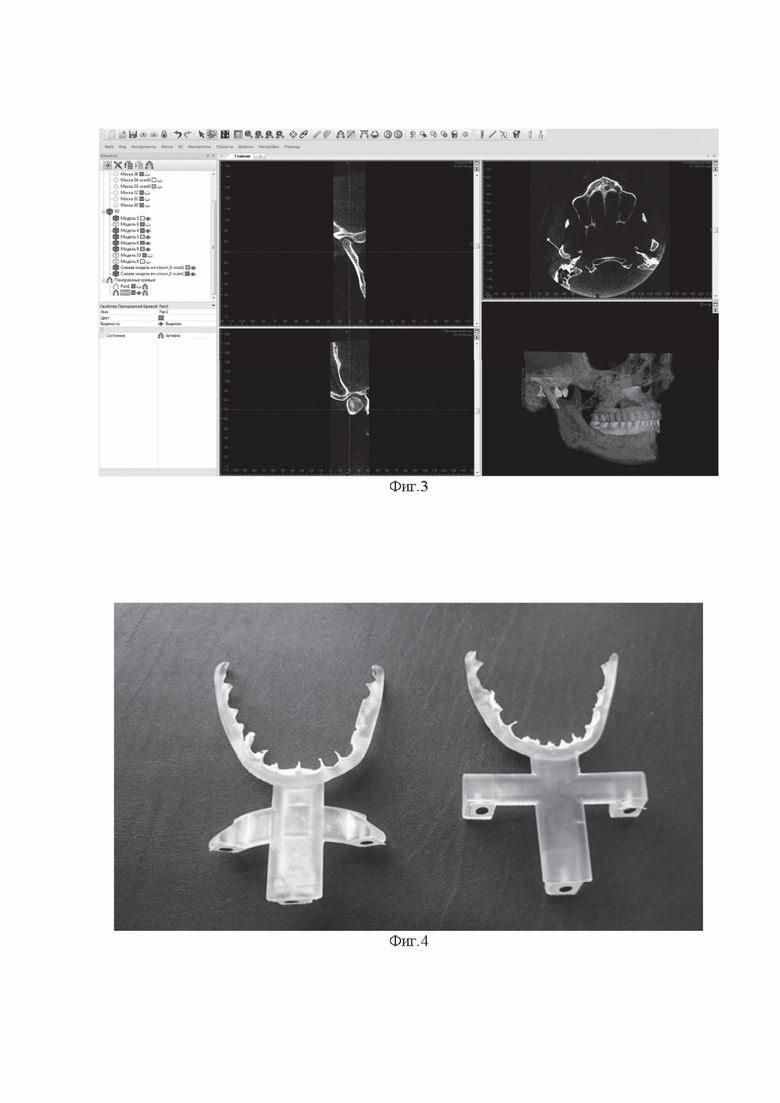
Фиг. 4 - Индивидуальные параокклюзионные вилки с оптическими метками.
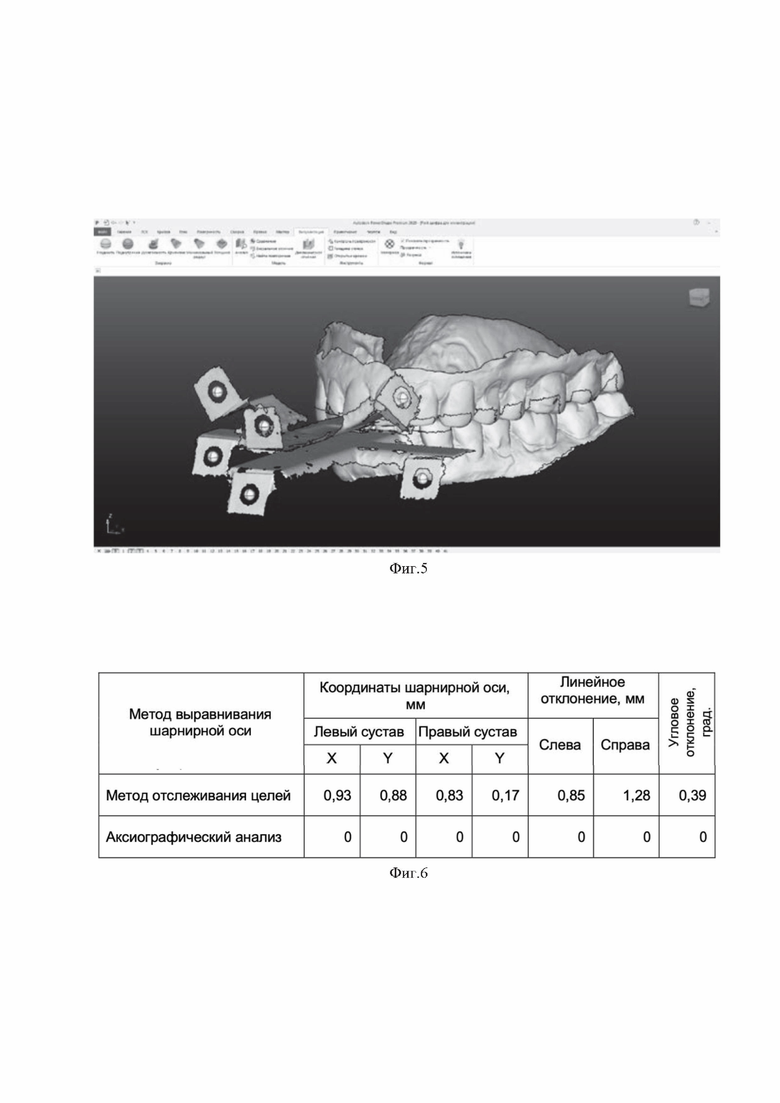
Фиг. 5 - Позиция оптических меток параокклюзионных вилок отображает пространственное положение нижней челюсти относительно верхней челюсти.
Фиг. 6 - Таблица с результатами измерений линейных отклонений, в качестве эталонного использован метод аксиографического анализа.
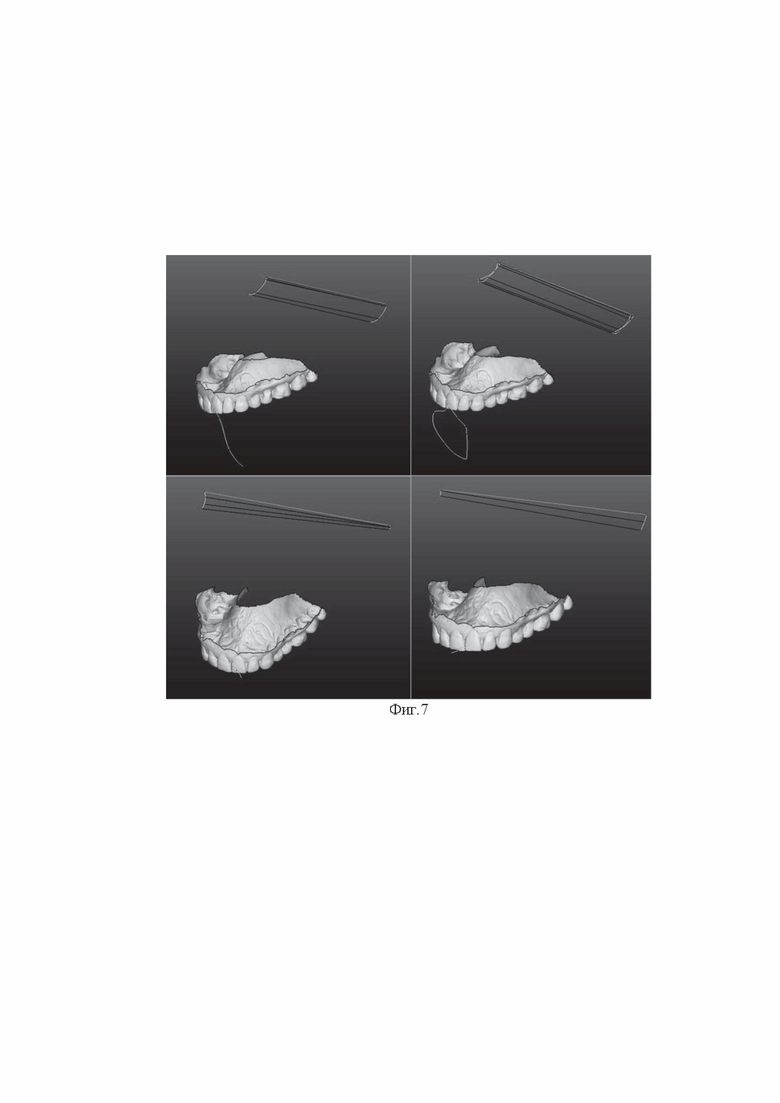
Фиг. 7 - Запись перемещения кинематической оси ВНЧС и резцовой точки нижней челюсти.
Фиг. 8-10 - Создание твердотельной поверхности компонентов виртуального артикулятора.
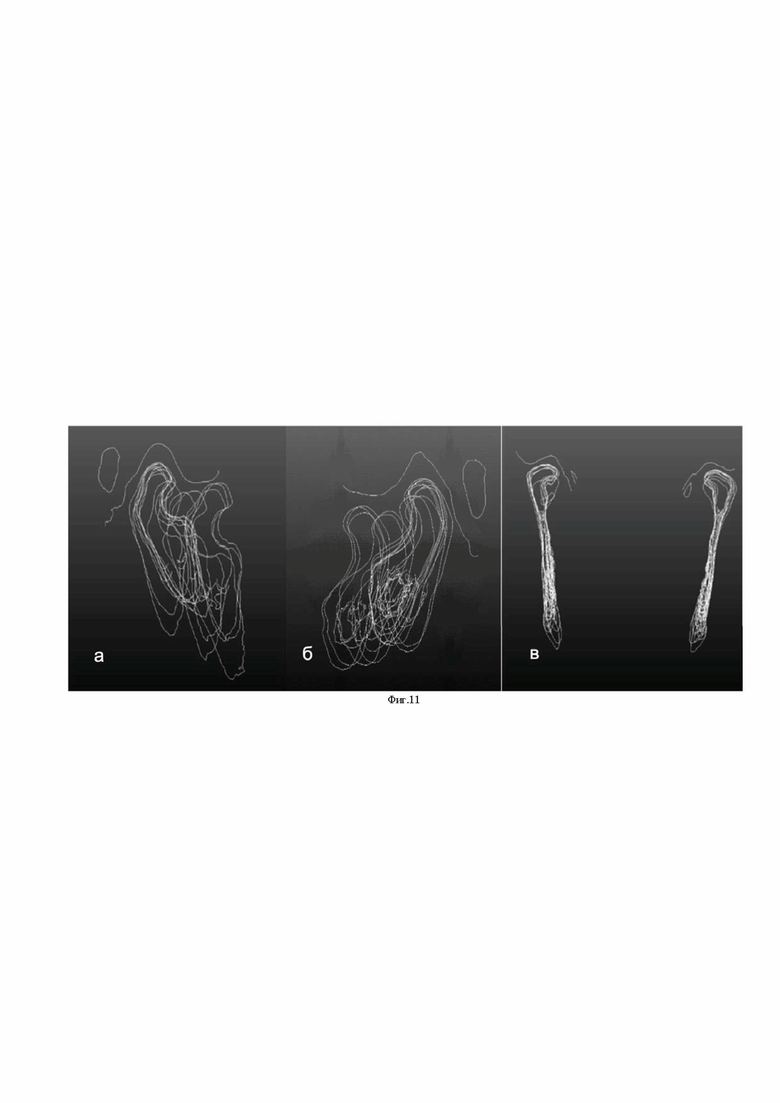
Фиг. 11 - Сечения ВНЧС при открывании рта; а и б - в сагиттальной плоскости, в) во фронтальной плоскости.
Фиг. 12 - Сечения ВНЧС при боковых движениях вправо; а - во фронтальной плоскости, б - в вертикальной плоскости.
Фиг. 13 - Сечения ВНЧС при боковых движениях влево; а - во фронтальной плоскости, б - в вертикальной плоскости.
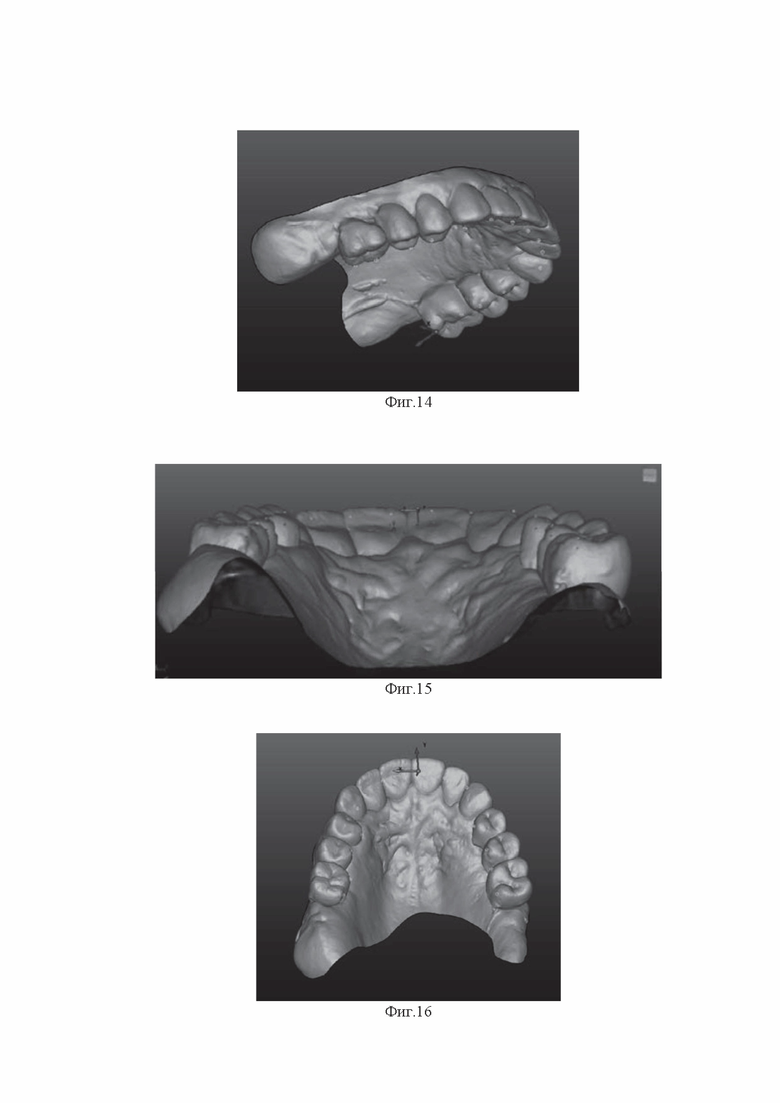
Фиг. 14 - Выбор индикаторных точек на режущих краях передних зубов нижней челюсти и опорных бугорках боковых зубов верхней челюсти с минимальным расстоянием до окклюзионной плоскости; если поверхность зуба пересекает окклюзионную плоскость, то выбирается точка с максимальным расстоянием от окклюзионной плоскости.
Фиг. 15 - Смещение индикаторных точек по вертикальной оси на расстояние, равное глубине отпечатков бугорков опорных зубов.
Фиг. 16 - Проецирование индикаторных точек на поверхность модели нижней челюсти «точки А1»: точки боковых зубов проецируются вдоль поперечной оси; точки передних зубов проецируются вдоль сагиттальной оси.
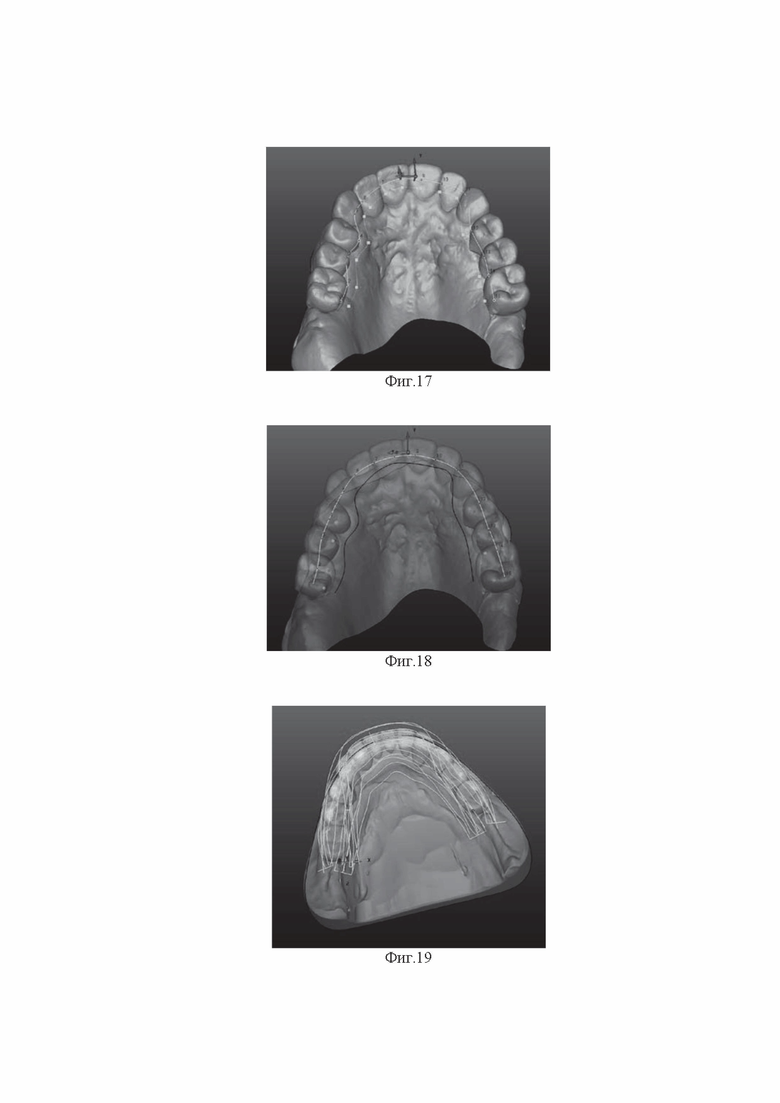
Фиг. 17 - Построение кривой Безье, соединяющей точки А1. Эквидистантное смещение кривой в горизонтальной плоскости (расстояние смещения определяет ширину пандуса ортотика).
Фиг. 18 - Построение направляющей кривой, соединяющей индикаторные точки.
Фиг. 19 - Последовательное эквидистантное смещение копий каркасных кривых на заданные углы и расстояния.
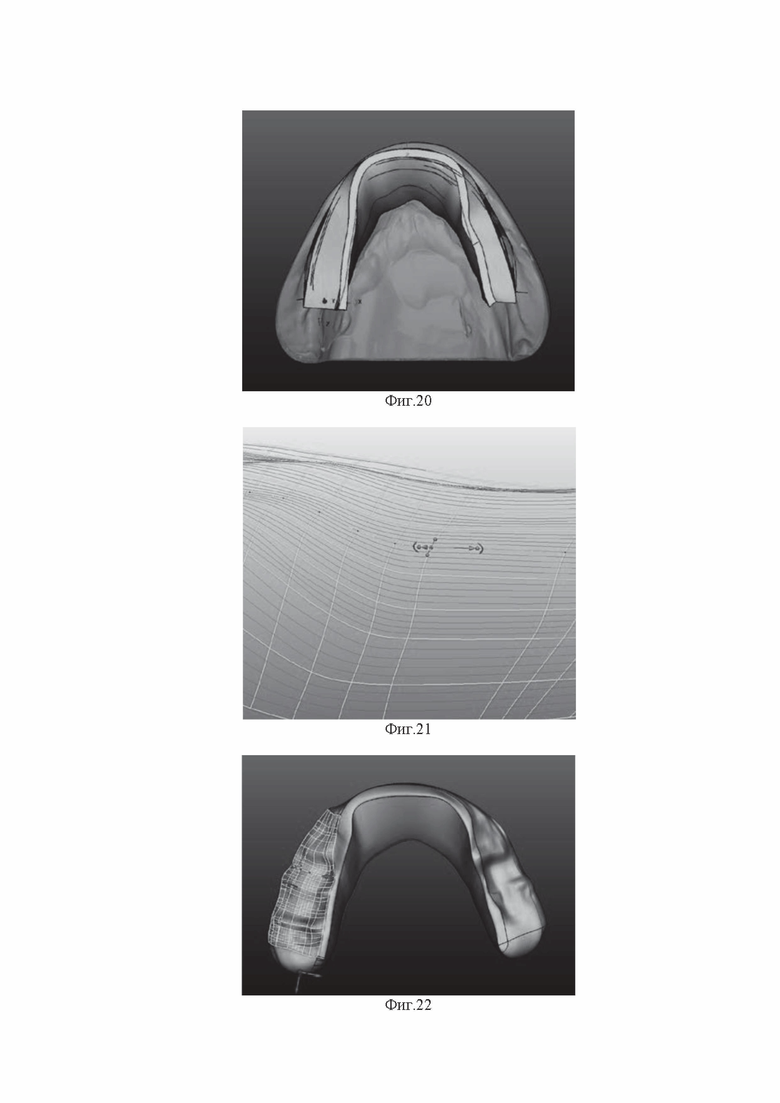
Фиг. 20 - Создание Power-поверхности по каркасным кривым.
Фиг. 21 - Изменение направления и длины каждого касательного вектора каркасных кривых в ключевых точках, параллельно траекториям экскурсионных движений, при этом направление и длина касательных векторов определяется конструктивным исполнением ортотика.
Фиг. 22 - Окклюзионная поверхность ортотика.
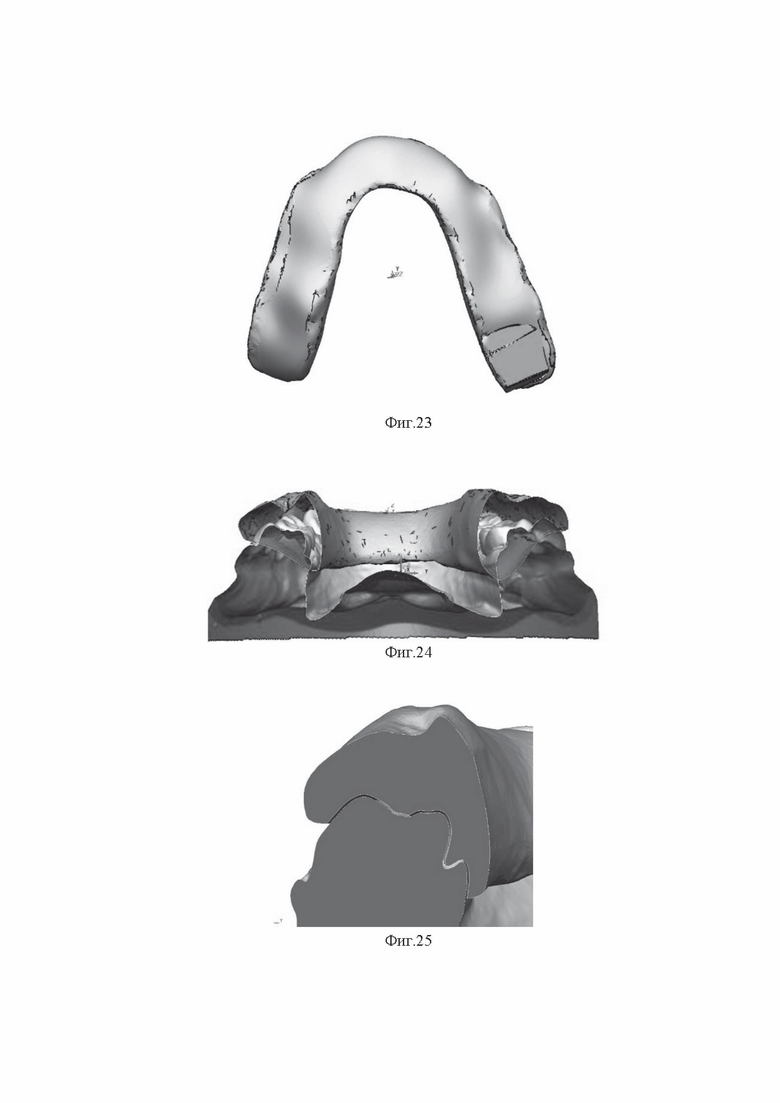
Фиг. 23 - Базис ортотика, модель нижней челюсти.
Фиг. 24 - Построение поверхности, эквидистантной модели нижней челюсти.
Фиг. 25 - Логическое вычитание эквидистантной поверхности из базиса.
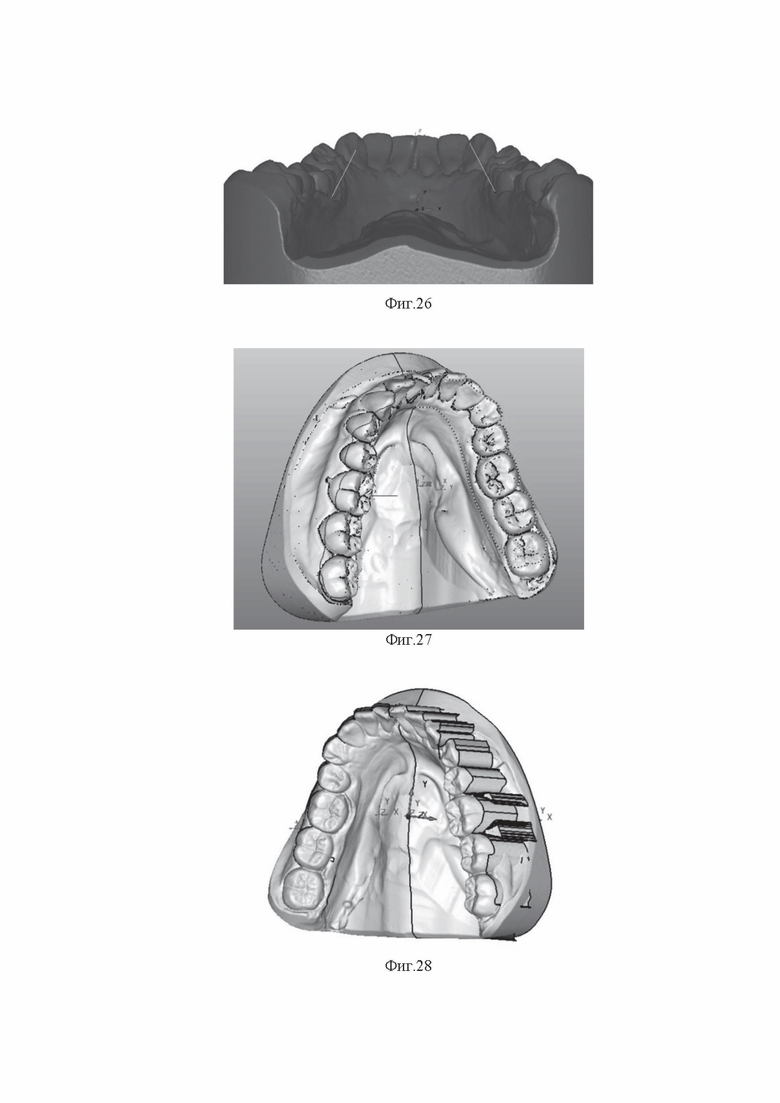
Фиг. 26 - Построение множества прямых линий, параллельных фронтальной плоскости, касательных к наиболее выступающей язычной поверхности каждого зуба и пересекающих линию десны. Выбор двух прямых с наибольшим углом наклона к срединной сагиттальной плоскости слева и справа.
Фиг. 27 - Деление базиса срединной сагиттальной плоскостью. Построение межевых линий на модели нижней челюсти относительно осей размещения.
Фиг. 28 - Построение цилиндрических поверхностей, в которых образующая параллельна соответственно правой и левой осям размещения, а направляющая совпадает с соответствующей межевой линией.
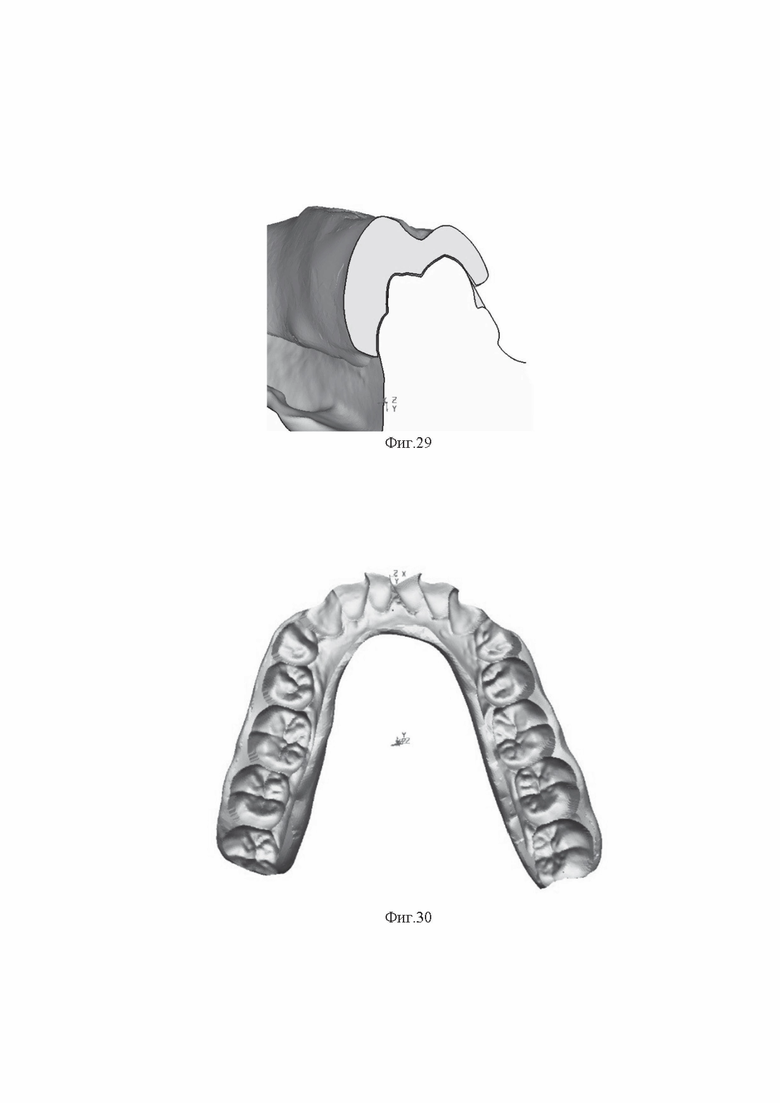
Фиг. 29 - Логическое вычитание цилиндров из базиса.
Фиг. 30 - Финальная цифровая модель ортотика.
Для иллюстрации возможности реализации и более полного понимания сути группы изобретений ниже представлен вариант ее осуществления, который может быть любым образом изменен или дополнен, при этом настоящая группа изобретений ни в коем случае не ограничивается представленным вариантом.
Для временного приведения нижней челюсти пациента в стабильное окклюзионное состояние, позволяющего мыщелкам принимать наиболее устойчивое положение в области височно-нижнечелюстных суставов осуществлялось моделирование ортотика.
Для этого на нижней челюсти пациента закрепляли депрограммирующую окклюзионную шину, обеспечивающую окклюзионный зазор в области жевательных зубов в диапазоне 2,6-3,6 мм. Таким образом, жевательные усилия передаются на три опоры: на точку резцового контакта и диски ВНЧС слева и справа. Пациент носил депрограммирующую окклюзионную шину в течение 13-16 часов.
В результате этого жевательные мышцы временно расслаблялись, суставные головки занимали естественное положение в суставных ямках.
При этом лечащим врачом мог быть подтвержден один из диагнозов:
а) окклюзионно-мышечное заболевание (несбалансированное сокращение жевательных мышц слева и справа вследствие нарушения окклюзии);
б) травмы (дисфункции) диска ВНЧС. В обоих случаях будет лечение, направленное либо на коррекцию окклюзионной дисгармонии (прямое протезирование), либо на изготовление ортотика с включением контактов на всех зубах (стабилизирующий ортотик, репозиционный ортотик).
Для моделирования виртуального артикулятора первоначально осуществляли сканирование гипсовых слепков верхней и нижней челюсти пациента с помощью оптического 3D-сканера VT-Dental.
Каждая гипсовая модель устанавливалась на ротационную платформу и сканировалась отдельно в 40 снимках, что позволяло программному обеспечению визуализировать полную окклюзионную поверхность каждой модели. В программном обеспечении оптического сканера были получены цифровые изображения гипсовых моделей в формате объемных триангулированных моделей STL (Фиг. 2).
После этого осуществляли сканирование анатомии пациента в положении центрального отношения челюстей на конусно-лучевом компьютерном томографе Planmeca ProMax 3dMAX, где поле обзора FOV включало верхнюю челюсть, нижнюю челюсть, подглазничную точку и наружный слуховой проход, Полученные данные были экспортированы в формат медицинских цифровых изображений DICOM.
После этого осуществляли сегментацию и объемную визуализацию цифровых изображений DICOM в бесплатном программном обеспечении Implant-Assistant.
Экспорт выходных данных осуществляли в формат цифровых триангулированных моделей STL.
Для воссоздания в виртуальном артикуляторе траектории движения кинематической оси нижней челюсти пациента относительно терминальной шарнирной оси височно-нижнечелюстного сустава пациента применяли метод, основанный на анализе сложного движения нижней челюсти, когда необходимо рассчитать траекторию перемещения точки относительно подвижной системы координат - которая, в свою очередь, движется относительно неподвижной системы координат, который осуществляли с применением полученных системой слежения за перемещением индивидуальных параокклюзионных вилок, закрепленных на зубных рядах нижней и верхней челюсти.
В данном случае, неподвижную систему координат привязывали к системе отсчета оптического сканера, а подвижную систему координат привязывали к терминальной шарнирной оси и Франкфуртской анатомической плоскости пациента.
Задача метода состояла в регистрации пространственного положения оптических меток верхней и нижней челюсти в координатах подвижной системы координат и воссоздании траектории кинематической оси нижней челюсти относительно терминальной шарнирной оси.
Для отслеживания оптических меток были изготовлены параокклюзионные вилки по индивидуальному проекту, которые крепились на зубные ряды верхней и нижней челюсти, при этом депрограммирующая окклюзионная шина предварительно снималась, либо использовались метки, расположенные на депрограммирующей окклюзионной шине.
На внутреннюю сторону вилок был нанесен окклюзионный регистрационный материал (С-силикон Zetalabor), после чего вилки были помещены на вестибулярную поверхность зубных рядов верхней и нижней челюсти, где удерживались до полной полимеризации регистрационного материала.
Пациент производил экскурсионные (открытие-закрытие, протрузионные, ретрузионные, боковые) движения нижней челюсти от положения центрального отношения. В процессе совершения этих движений настольный 3D сканер VT-Dental регистрировал трехмерные координаты (кадры) оптических меток с интервалом 3 сек.
На Фиг. 5 показана позиция оптических меток параокклюзионных вилок в стартовой позиции, т.е. когда нижняя челюсть относительно верхней челюсти находится в положении центрального отношения.
Как было отмечено ранее, подвижная система координат привязана к терминальной шарнирной оси и Франкфуртской анатомической плоскости и при переходе к следующему кадру она выравнивалась с координатами оптических меток верхней челюсти в положении центрального отношения. На этом же шаге по меткам нижней челюсти выравнивались ключевые точки траектории кинематической оси относительно меток верхней челюсти, т.е. относительно терминальной шарнирной оси и Франкфуртской плоскости.
Данный метод обеспечивает достоверность результатов, сопоставимую с кондилографом CADIAX diagnostic, используемых в качестве эталонных (Фиг. 6). Хотя эта методология предусматривает некоторые ограничения, связанные с необходимостью 3D печати индивидуальной параокклюзионной вилки и прикрепления ее к зубам, она не требует применения громоздкого дорогостоящего оборудования или сложной многошаговой процедуры для осуществления данного этапа. При этом он является более простым, чем существующие методы, и позволяет напрямую реконструировать движение нижней челюсти и суставных головок относительно верхней челюсти, не требуя от врача проведения глубокого аксиографического анализа (Фиг. 7).
Метод отслеживания целей принимали для разработки полностью регулируемого виртуального артикулятора, способного точно воспроизводить движения суставных головок височнонижнечелюстных суставов.
Виртуальный артикулятор, имитирующий движение нижней челюсти, представлен как инструмент для сборки компонентов узла биомеханической системы жевательного аппарата пациента с учетом индивидуальной кинематической и динамической взаимосвязи этих компонентов.
В качестве входных данных для разработки виртуального артикулятора могут быть использованы: а) трехмерная геометрия анатомических компонентов сборки (мыщелков, гленоидных ямок, зубных рядов верхней и нижней челюсти);
б) траектории движения нижней челюсти и суставных головок;
в) терапевтическое положение верхней и нижней челюсти в положении центрального отношения, полученное после ношения депрограммирующей окклюзионной шины;
г) векторы мышечных усилий, которые передают сумму давлений на диски ВНЧС.
Основная функция виртуального артикулятора состоит в том, чтобы, изменяя координаты окклюзионных контактов, и получать на основе этих данных графическую трассировку челюсти при расслабленном мышечном тонусе. Это положение затем использовали для построения окклюзионной поверхности ортотика.
Модель виртуального артикулятора была разработана с использованием метода реверсного инжиниринга, где отдельные медицинские компьютерные изображения костных тканей были преобразованы в модели твердого тела (Фиг. 8-10).
Поскольку анатомические слои сустава в зоне контакта мыщелок-ямка неоднородны по своей структуре, они имеют разную степень рентгеноконтрастности и отображаются на рентгеновских снимках как участки с небольшими областями затенения.
После рендеринга медицинских изображений и получения объемной триангулированной модели эти области выглядят как полупрозрачные островки на гладкой поверхности сустава (Фиг. 8).
Для снижения риска искажения модели ортотика, ввиду погрешностей в исходной модели, в процесс моделирования виртуального артикулятора был добавлен алгоритм преобразования трехмерной поверхности методом обратного проектирования.
Этот процесс реализовывался в следующей последовательности. На триангулированной модели выбиралась область треугольников по локальному углу от горизонтали. Далее, выбранная область конвертировалась в облако точек, из которого удалялись точки вне заданного расстояния (Фиг. 9). По оставшимся точкам строилась поверхность, состоящая из массива треугольников, сшитых между собой, т.е. сторона любого треугольника являлась стороной соседнего треугольника. Затем, полученная сетка аппроксимировалась сплайнами, на которых строилась объемная твердотельная поверхность (Фиг. 10).
Точность построенной твердотельной поверхности измерялась методом сравнения с фрагментами исходной триангулированной поверхности. Составной частью виртуального артикулятора являлась виртуальная лицевая дуга, которая функционирует, как анализатор движения челюсти. Этот инструмент определяет пространственное положение оптических меток (целей) относительно суставов посредством индивидуальных параокклюзионных вилок; а также регистрирует траектории вращательных и поступательных движений всех компонентов сборки (суставных головок, суставных ямок, моделей зубов верхней и нижней челюсти) во всех имеющихся степенях свободы и переносит эти движения в единую систему отсчета виртуального артикулятора.
Так, с помощью виртуальной лицевой дуги и метода отслеживания целей были получены траектории движения мыщелков ВНЧС, начиная от положения центрального отношения - к максимальному открытию рта - к закрытию рта - к положению центрального отношения (Фиг. 11), затем были получены траектории правых и левых латеральных экскурсий. (Фиг. 12, 13). Подвижная система координат виртуальной лицевой дуги была привязана к оси шарнира и анатомической Франкфуртской плоскости пациента.
Разработанная модель виртуального артикулятора позволяла получать анатомически точную визуализацию движения челюсти и выполнить графическую трассировку статических и динамических окклюзионных контактов. Реальная специфическая для пациента мыщелковая позиция отображалась в трехмерном объеме, диапазоны всех движений суставных головок легко регистрировались и оценивались. Изменения в зазоре между мыщелком и ямкой можно измерить во время движений или в положении покоя.
Представленный способ моделирования виртуального артикулятора открывает дополнительные возможности для будущих исследований в различных подходах к созданию компьютерных биомеханических моделей, позволяющих объединить анатомические органы в единую структуру. В сочетании с методами реверсного инжиниринга эти модели смогут применяться в широком спектре медицинских приложений, включая моделирование функций глотания, жевания и артикуляции.
Диск ВНЧС является хорошо изученной тканью и можно подробно описать ее форму, структуру, состав и механические свойства на языке программирования.
После этого на основе полученной модели виртуального артикулятора, имитирующего движение нижней челюсти моделировали ортотик.
Процесс моделирования ортотика реализовывался в три основных этапа:
а) создание базиса;
б) создание окклюзионной поверхности;
в) создание внутренней поверхности.
Базис ортотика формировался поверхностью, состоящей из продольных и поперечных кривых, которые являлись параметрическими кубическими кривыми Безье. Поверхность проходила через все указанные кривые, каждая из которых была отредактирована индивидуально. Кривые управлялись ключевыми точками, через которые должна пройти поверхность, и векторами касательных в этих точках.
Для моделирования ортотика использовались трехмерные изображения модели зубного ряда нижней и верхней челюсти пациента, полученные на оптическом сканере, при этом данные высоты разобщения вершин контактных бугорков верхней челюсти с окклюзионной поверхностью нижней челюсти воспроизводились на виртуальном артикуляторе.
Также использовались данные, полученные системой слежения за перемещением индивидуальных параокклюзионных вилок, закрепленных на зубных рядах нижней и верхней челюсти, что позволяет получать точные траектории экскурсионных движений нижней челюсти, воспроизводимых на виртуальном артикуляторе. Для моделирования трехмерной геометрии ортотика использовалось программное обеспечение Power Shape, Autodesk.
Моделирование базиса начинали с инициализации входных параметров, в том числе:
а) местоположение индикаторных точек на триангулированных моделях верхней и нижней челюсти - параметр выбирается пользователем;
б) высота разобщения вершин контактных бугорков верхней челюсти с окклюзионной поверхностью нижней челюсти в положении центрального соотношения - параметр определяется врачом на основе данных, возвращаемых виртуальным артикулятором;
в) ширина пандуса («пандус» - полка на окклюзионной поверхности ортотика, по которой свободно скользят опорные зубы верхней челюсти до момента их стабилизации в терапевтическом положении) - параметр определяется врачом, исходя из типа конструктивного исполнения ортотика;
г) угол наклона и длина траектории смещения каждой индикаторной точки при имитации экскурсионных движений нижней челюсти - параметр возвращается виртуальным артикулятором;
д) глубина отпечатков бугорков контактных зубов на окклюзионной поверхности ортотика - параметр определяется врачом, исходя из типа конструктивного исполнения.
Процесс моделирования базиса ортотика описан Фигурами 14-20.
Завершающим процессом блока создания базиса является построение 3D Power-поверхностей по каркасным кривым. Power-поверхность состоит из продольных образующих кривых (лонгитуды) и поперечных образующих кривых (латералы), как показано на Фиг. 21.
Также поверхность имеет еще одну кривую, она называется спин или направляющая. Направляющая проходит в продольном направлении базиса, управляя ориентацией латералов. Точки пересечения латералов и лонгитуд называют ключевыми точками - при их перемещении изменяется форма поверхности.
Создание окклюзионной поверхности ортотика начинали с инициализации входных параметров, в том числе:
а) модели верхней и нижней челюсти;
б) межокклюзионное расстояние;
в) траектории экскурсионных движений нижней челюсти;
г) модель базиса;
д) координаты индикаторных точек.
Процесс начинался с инициализации траектории перемещения индикаторных точек. Эти траектории возвращались виртуальным артикулятором в процессе имитации экскурсионных движений нижней челюсти. Алгоритм перемещал вдоль вертикальной оси ключевые точки образующих кривых поверхности базиса, пересекающих поверхность опорных зубов верхней челюсти, на границу поверхности зубного ряда.
Затем следовало изменение направления каждого касательного вектора в ключевых точках параллельно траекториям экскурсионных движений. Направление и длина касательных векторов определяется конструктивным исполнением ортотика. Таким образом, создавалась гладкая окклюзионная поверхность ортотика для плавного смещения опорных бугорков в терапевтическое положение, другими словами - для принудительной мягкой посадки суставных головок в заданные координаты. Процесс описан фигурами 21, 22.
Создание внутренней поверхности ортотика начинали с инициализации входных параметров, в том числе:
а) базиса ортотика;
б) модели нижней челюсти
последовательность процессов построения внутренней поверхности ортотика, прилегающей к зубам нижней челюсти, а также моделирования фиксирующих элементов описана фигурами 23-30.
С помощью разработанных алгоритмов достаточно быстро может быть спроектирована твердотельная модель ортотика для ее изготовления на станке с числовым программным управлением. Разработанные алгоритмы вычисляют и визуализируют как статические, так и кинематические окклюзионные пересечения в цифровых моделях и устраняют их в процессе проектирования и коррекции окклюзионной поверхности ортотика.
Ключевым индикатором для сравнительного анализа являлась разница между запланированным и фактическим положением мыщелков в суставной ямке.
Благодаря этому обеспечивается достижение технического результата, заключающегося в повышении точности полученной модели ортотика, тем самым повышается качество автоматизированного моделирования ортотика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ протезирования при полном отсутствии зубов с использованием имплантатов | 2022 |
|
RU2784297C1 |
| Способ выполнения терапевтической санации полости рта в период лечения мышечно-суставной дисфункции | 2024 |
|
RU2830400C1 |
| Способ изготовления окклюзионной шины | 2018 |
|
RU2692994C1 |
| Цифровая окклюзионная шина | 2018 |
|
RU2692993C1 |
| Способ изготовления капы на нижнюю челюсть | 2018 |
|
RU2683895C1 |
| Способ определения центрального положения нижней челюсти у пациентов с дисфункцией ВНЧС | 2020 |
|
RU2738004C1 |
| СПОСОБ ДИАГНОСТИКИ И ЛЕЧЕНИЯ НЕСТАБИЛЬНОСТИ СИСТЕМЫ АРТИКУЛЯЦИИ У ПАЦИЕНТОВ С ВИСОЧНО-НИЖНЕЧЕЛЮСТНЫМИ РАССТРОЙСТВАМИ | 2018 |
|
RU2687865C1 |
| Способ комплексной реабилитации пациентов с частичной утратой зубов и симптомами дисфункций височно-нижнечелюстного сустава, проблем окклюзии и лицевых болей | 2021 |
|
RU2778839C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА НИЖНЕЙ ЧЕЛЮСТИ И УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ГИПСОВЫХ МОДЕЛЕЙ В ПРОСТРАНСТВО АРТИКУЛЯТОРА | 2013 |
|
RU2532358C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЦЕНТРАЛЬНОГО СООТНОШЕНИЯ ЧЕЛЮСТЕЙ ПРИ ПРОТЕЗИРОВАНИИ ПАЦИЕНТОВ С ПОЛНЫМИ СЪЕМНЫМИ ПРОТЕЗАМИ | 2009 |
|
RU2441622C2 |



Группа изобретений относится к неинвазивным методам лечения височно-нижнечелюстных расстройств, в частности к моделированию твердотельной поверхности ортотика, и может быть применена в медицинской промышленности. Сущность группы изобретений заключается в способе автоматизированного моделирования ортотика, в котором перед моделированием следящего артикулятора и при построении твердотельной модели ортотика пациенту устанавливают депрограммирующую окклюзионную шину. Группа изобретений обеспечивает повышение точности полученной модели ортотика. 3 н. и 14 з.п. ф-лы, 30 ил.
1. Способ автоматизированного моделирования ортотика включает установку пациенту средства отслеживания движения челюсти, моделирование следящего виртуального артикулятора на основе данных, полученных средством отслеживания движения челюсти, и моделирование ортотика на основе следящего виртуального артикулятора, отличающийся тем, что перед установкой средства отслеживания движения челюсти пациенту устанавливают депрограммирующую окклюзионную шину.
2. Способ по п. 1, отличающийся тем, что установку депрограммирующей окклюзионной шины пациенту осуществляют не менее чем на 1 час.
3. Способ по п. 2, отличающийся тем, что установку депрограммирующей окклюзионной шины пациенту осуществляют на 4-12 часов.
4. Способ по п. 1, отличающийся тем, что данные, полученные средством отслеживания движения челюсти, преобразовывают в облако точек, а подвижные координаты приводят к единой точке отсчета.
5. Способ по п. 1, отличающийся тем, что на вход устройства обработки данных для моделирования следящего артикулятора отправляют данные верхней и нижней челюсти в положении центрального отношения, полученные депрограммирующей окклюзионной шиной.
6. Способ по п. 5, отличающийся тем, что в следящем виртуальном артикуляторе регистрируют изменения координат окклюзионных контактов и получают на основе этих данных графическую трассировку челюсти при расслабленном мышечном тонусе.
7. Способ по п. 1, отличающийся тем, что модель виртуального артикулятора разрабатывают с использованием метода реверсного инжиниринга, где отдельные медицинские компьютерные изображения костных тканей преобразуют в модели твердого тела.
8. Способ по п. 7, отличающийся тем, что в процессе моделирования виртуального артикулятора получают виртуальную лицевую дугу, при помощи которой определяют пространственное положение челюсти относительно суставов, а также регистрируют траектории вращательных и поступательных движений всех компонентов сборки во всех имеющихся степенях свободы.
9. Способ по п. 8, отличающийся тем, что при моделировании окклюзионной поверхности шины на основании виртуальной лицевой дуги получают параметры высоты разобщения вершин контактных бугорков верхней челюсти с окклюзионной поверхностью нижней челюсти в положении центрального соотношения, полученном депрограммирующей окклюзионной шиной, а также параметр угла наклона и длины траектории смещения каждой индикаторной точки при имитации следящим виртуальным артикулятором экскурсионных движений нижней челюсти.
10. Способ по п. 1, отличающийся тем, что после осуществления процесса автоматизированного моделирования ортотика он может быть изготовлен посредством аддитивной технологии или методом механической обработки, или методом литья.
11. Система автоматизированного моделирования ортотика, включающая устройство обработки данных, выполненное с возможностью моделирования следящего виртуального артикулятора, и подключенное к нему средство отслеживания движения челюсти, отличающаяся тем, что дополнительно содержит депрограммирующую окклюзионную шину.
12. Система по п. 11, отличающаяся тем, что депрограммирующая окклюзионная шина состоит из двух элементов, один из которых предназначен для установки на нижнюю челюсть, а другой предназначен для установки на верхнюю челюсть.
13. Система по п. 11, отличающаяся тем, средство отслеживания движения челюсти представлено в виде индивидуальных параокклюзионных вилок для верхней и нижней челюстей с реперными точками и устройства слежения в виде сканера, обеспечивающего возможность регистрации трехмерных координат положения реперных точек и передающего данные в устройство обработки данных.
14. Система по п. 13, отличающаяся тем, что депрограммирующая окклюзионная шина закреплена на параокклюзионной вилке для нижней челюсти.
15. Средство отслеживания движения челюсти системы автоматизированного моделирования ортотика, отличающееся тем, что выполнено в виде депрограммирующей окклюзионной шины с реперными точками
16. Средство по п. 15, отличающееся тем, что депрограммирующая окклюзионная шина состоит из двух элементов, один из которых предназначен для установки на нижнюю челюсть, а другой предназначен для установки на верхнюю челюсть.
17. Средство по п. 15, отличающееся тем, что реперные точки представлены в виде графических или оптических меток на наружной поверхности.
| US 2017312065 А1, 02.11.2017 | |||
| US 2018078344 A1, 22.03.2018 | |||
| US 2020275995 A1, 03.09.2020 | |||
| US 2015289960 A1, 15.10.2015. |

