ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к области технологий машиностроения, в частности к системе и способу обследования ствола скважины для сверхглубокого вертикального ствола.
Описание уровня техники
С увеличением глубины разработки угольных шахт глубокие и сверхглубокие скважины становятся основным направлением развития будущего строительства угольных шахт. Во время добычи угля сверхглубокий ствол скважины, как единственное средство подъема твердых полезных ископаемых, расположенных на глубине, является неотъемлемой частью системы добычи угля. Из-за сложных геологических условий, среды с воздушным потоком, вибрации устройств и других факторов на стенке ствола скважины могут образовываться трещины, деформации, может происходить просачивание воды и т.п. Если сверхглубокий ствол скважины имеет дефект, добыча угля может быть полностью остановлена, что серьезно скажется на экономической эффективности шахты и безопасности рабочих.
С одной стороны, в настоящее время большинство отечественных угольных шахт все еще прибегают к регулярному ручному обследованию для определения рабочего состояния сверхглубокого ствола скважины. Это довольно обратный подход, который не только не позволяет определить состояние ствола скважины для сверхглубокого ствола скважины в режиме реального времени, но также не позволяет точно определить и измерить местоположение отклонений в сверхглубоком стволе скважины. С другой стороны, эксперты внутри страны и за рубежом провели тщательные исследования системы обследования в обычных условиях, но исследований системы обследования ствола скважины для сверхглубокого вертикального ствола скважины же было проведено недостаточно. Таким образом, для сверхглубоких стволов с довольно сложными геологическими условиями необходимо установить набор системы обследования, интегрированной с передовой технологией управления посредством датчиков и состоящей из роботов-инспекторов, чтобы улучшить применение технологии мониторинга состояния на основе беспроводной сети датчиков в сверхглубоких стволах скважин, таким образом гарантируя безопасность промышленного производства.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Техническая задача
Ввиду этого настоящее изобретение обеспечивает систему и способ обследования ствола скважины для сверхглубокого вертикального ствола для решения проблем, упомянутых выше в предшествующем уровне техники.
Техническое решение
Для достижения вышеупомянутой цели в настоящем изобретении принимаются следующие технические решения:
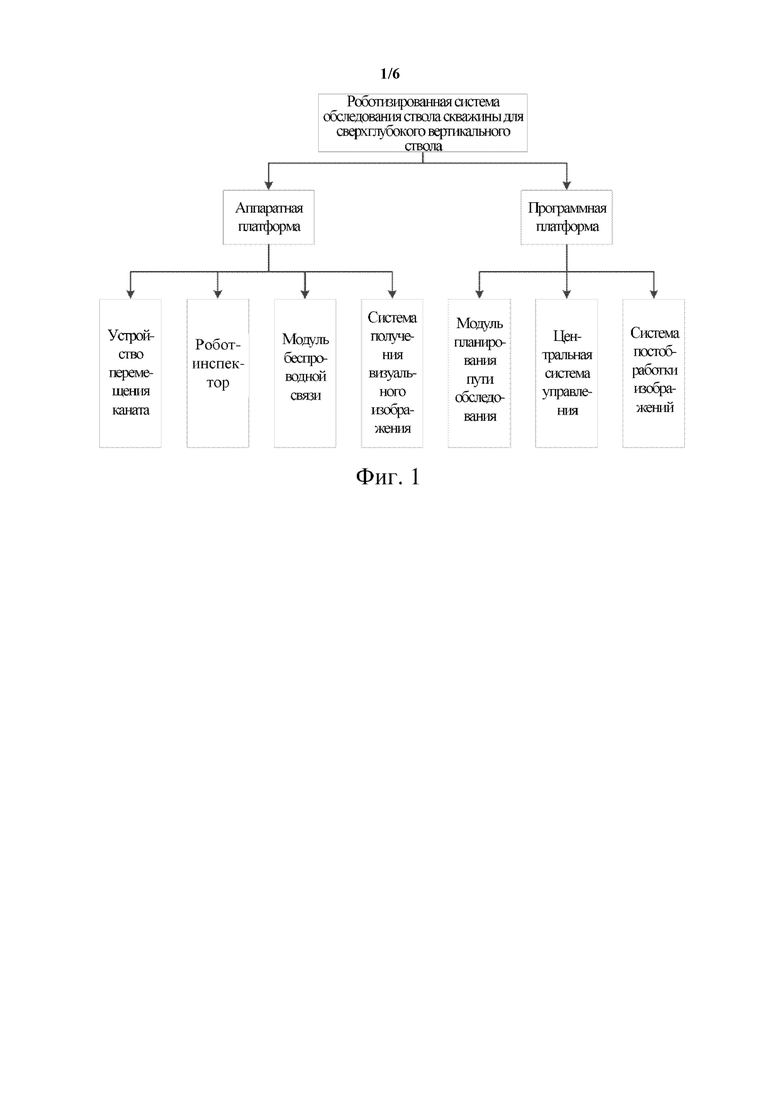
Система обследования ствола скважины для сверхглубокого вертикального ствола содержит систему перемещения каната, роботов-инспекторов, систему получения визуального изображения, модуль беспроводной связи, центральную систему управления и систему постобработки изображений хост-компьютера, где
система перемещения каната содержит: поверхностную направляющую перемещения каната на поверхности, подземную направляющую перемещения каната, поверхностное устройство перемещения каната, установленное в поверхностной направляющей перемещения каната, подземное устройство перемещения каната, установленное в подземной направляющей перемещения каната, и канат, верхний конец которого соединен с поверхностным устройством перемещения каната, а нижний конец соединен с подземным устройством перемещения каната; и вдоль каната размещено множество роботов-инспекторов;
модуль беспроводной связи содержит модуль беспроводной передачи данных, модуль беспроводной передачи изображений и модуль позиционирования GPS;
система получения визуального изображения содержит подчиненный компьютер и взрывозащищенные камеры; после того, как информация в виде изображений, полученная взрывозащищенными камерами, обработана подчиненным компьютером, обработанное изображение передается модулем беспроводной передачи изображений в систему постобработки изображений хост-компьютера;
центральная система управления подключена к роботам-инспекторам и системе перемещения каната посредством модуля беспроводной передачи данных, а роботы-инспекторы подключены к центральной системе управления посредством модуля позиционирования GPS;
центральная система управления содержит модуль управления роботом-инспектором для контроля условий работы роботов-инспекторов; модуль управления устройством перемещения каната для управления перемещением поверхностного устройства перемещения каната и подземного устройства перемещения каната в системе перемещения каната; и модуль управления беспроводной связью для управления связью между центральной системой управления, роботами-инспекторами и системой перемещения каната; а также
при необходимости продольного мониторинга ствола скважины, центральная система управления останавливает систему перемещения каната и запускает роботов-инспекторов для подъема в продольном направлении по канату, чтобы получить продольные изображения ствола скважины с помощью взрывозащищенных камер; при необходимости мониторинга окружности ствола скважины, центральная система управления останавливает роботов-инспекторов для остановки роботов-инспекторов на канате; и запускает систему перемещения каната для приведения в движение роботов-инспекторов на канате для получения изображений окружности ствола скважины; и при необходимости мониторинга определенных местоположений в стволе скважины, центральная система управления одновременно управляет роботами-инспекторами и системой перемещения каната, пока роботы-инспекторы не достигнут целевых местоположений, а затем взрывозащищенные камеры используются для получения изображений целевых местоположений в стволе скважины.
Кроме того, система постобработки изображений хост-компьютера формирует сеть мониторинга в стволе скважины в соответствии с информацией в виде изображений, возвращаемой взрывозащищенными камерами, соответственно переносимыми роботами-инспекторами; если один или несколько роботов-инспекторов выходят из строя, центральная система управления использует модуль управления роботом-инспектором для автоматического управления приводными механизмами остальных нормально работающих роботов-инспекторов и использует модуль управления устройством перемещения каната для автоматического управления приводным механизмом системы перемещения каната в соответствии с воздействием неисправного робота-инспектора на сеть мониторинга, чтобы настроить объем патрулирования и мониторинга каждого нормально работающего робота-инспектора и, в дальнейшем, восстановить сеть мониторинга.
Кроме того, подземные и поверхностные устройства перемещения каната идентичны по конструкции и по отдельности содержат корпус, приводной электродвигатель и множество подвижных роликов; на корпусе предусмотрен механизм блокировки каната, способный надежно зажимать канат; а подвижные ролики содержат ведущий ролик и один или более ведомых роликов; а также
каждый подвижный ролик расположен и поддерживается валом ролика, который установлен в корпусе посредством подшипника; основание приводного электродвигателя жестко закреплено на корпусе, а конец отбора мощности приводного электродвигателя соединен посредством редуктора с валом ролика, который поддерживает ведущий ролик.
Кроме того, каждое из подземного устройства перемещения каната и поверхностного устройства перемещения каната имеет направляющий механизм; направляющий механизм содержит поперечный направляющий механизм и продольный направляющий механизм; поперечный направляющий механизм содержит поперечную направляющую опору и поперечный направляющий ролик; поперечная направляющая опора соединена с корпусом на одном конце и дополнительно соединена с поперечным направляющим роликом на другом конце, а поперечный направляющий ролик расположен в осевом направлении параллельно поверхности качения, где расположены подвижные ролики; продольный направляющий механизм содержит продольную направляющую опору и продольный направляющий ролик; продольная направляющая опора соединена с корпусом на одном конце и дополнительно соединена с продольным направляющим роликом на другом конце, а продольный направляющий ролик расположен в осевом направлении перпендикулярно поверхности качения, где расположены подвижные ролики; а также
ведущий ролик, приводимый в движение приводным электродвигателем, работает во взаимодействии с поперечным направляющим механизмом и продольным направляющим механизмом для осуществления позиционирования и направления, тем самым приводя ведомые ролики в движение, чтобы всегда перемещаться по дорожке перемещения каната.
Кроме того, основной корпус дорожки дополнительно содержит поперечную направляющую поверхность и продольную направляющую поверхность; одна сторона поверхности качения снабжена продольной направляющей поверхностью, перпендикулярной поверхности качения, а другая ее сторона снабжена канавкой L-образной формы, образованной вертикальной секцией и поперечной секцией, которые сообщаются в месте изгиба; направление протяжения вертикальной секции перпендикулярно поверхности качения, а отверстие вертикальной секции находится на одном уровне с поверхностью качения; направление протяжения поперечной секции параллельно поверхности качения, а поперечная секция имеет поперечную направляющую поверхность, параллельную поверхности качения; подвижные ролики предусмотрены непосредственно над поверхностью качения; поперечная направляющая опора расположена в вертикальной секции канавки, а поперечный направляющий ролик расположен в поперечной секции; один конец поперечной направляющей опоры выступает из вертикальной секции и затем соединяется с корпусом, а другой конец поперечной направляющей опоры соединяется с поперечным направляющим роликом, зацепленным за поперечную направляющую поверхность; поперечный направляющий ролик соединен с поперечной направляющей поверхностью посредством проволоки, и продольный направляющий ролик соединен с продольной направляющей поверхностью посредством проволоки; и ведущий ролик, приводимый в движение приводным электродвигателем, может приводить в движение поперечный направляющий ролик, чтобы он катился по поперечной направляющей поверхности, продольный направляющий ролик, чтобы он катился по продольной направляющей поверхности, и ведомые ролики, чтобы они катились по поверхности качения.
Кроме того, корпус выполнен в форме кругового сектора, а валы роликов распределены в радиальном направлении корпуса в форме кругового сектора; два конца радиального сечения корпуса в форме кругового сектора отдельно снабжены крепежной стойкой, причем каждая крепежная стойка снабжена одним продольным направляющим механизмом и одним поперечным направляющим механизмом; продольный направляющий механизм предусмотрен на конце крепежной стойки, примыкающем к внутренней круговой поверхности корпуса в форме кругового сектора; и поперечный направляющий механизм предусмотрен на конце крепежной стойки, который примыкает к внешней круговой поверхности корпуса в форме кругового сектора; два продольных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично, и два поперечных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично; ось продольного направляющего ролика перпендикулярна поверхности в форме кругового сектора корпуса в форме кругового сектора, а ось поперечного направляющего ролика параллельна поверхности в форме кругового сектора корпуса в форме кругового сектора; местоположения, в которых продольная направляющая опора и поперечная направляющая опора расположены на крепежной стойке, могут быть отрегулированы в радиальном направлении корпуса в форме кругового сектора.
Другой технической целью настоящего изобретения является создание способа обследования ствола скважины для сверхглубокого вертикального ствола, который включает следующие этапы:
(1) перед обследованием, вертикальное разделение ствола скважины на секции и оснащение каждой секции одним роботом-инспектором, чтобы роботы-инспекторы отвечали за обследование в своих соответствующих участках; определение информации о местоположении роботов-инспекторов во время расположения роботов-инспекторов; и дальнейшее позиционирование подземного устройства перемещения каната и поверхностного устройства перемещения каната перед обследованием;
(2) во время обследования, мониторинг каждым роботом-инспектором ствола скважины в пределах обозначенного участка обследования, захват изображений стенок ствола скважины с помощью взрывозащищенной камеры и загрузка полученных изображений в систему постобработки изображений хост-компьютера; получение с помощью модуля позиционирования GPS информации о местоположении в реальном времени роботов-инспекторов и загрузка информации в центральную систему управления; обнаружение информации о местоположении подземного устройства перемещения каната и поверхностного устройства перемещения каната в режиме реального времени с помощью устройств определения местоположения, установленных на подземном устройстве перемещения каната и поверхностном устройстве перемещения каната, и загрузка информации в центральную систему управления в реальном времени; определение центральной системой управления в соответствии с полученной в реальном времени информацией о местоположении подземного устройства перемещения каната и поверхностного устройства перемещения каната, синхронизированы ли два устройства перемещения в движении; и если они не синхронизированы в движении, управление подземным устройством перемещения каната и поверхностным устройством перемещения каната для синхронизации движения; а также
(3) после обследования, обработку с помощью системы постобработки изображений хост-компьютера полученных изображений для определения того, присутствует ли дефект в стволе скважины.
Преимущественный эффект
(1) Система обследования ствола скважины для сверхглубокого вертикального ствола в настоящем изобретении может осуществлять мониторинг ствола скважины шахты при соблюдении требований взрывозащиты в угольной шахте и применима ко всем глубоким средам, таким образом реализуя в реальном времени мониторинг окружающей среды.
(2) Канат, используемый в настоящем изобретении, при необходимости может быть заменен другим предметом в форме стержня, например жестким стержнем или кабелем. Различные роботы-инспекторы могут быть спроектированы в соответствии с диаметром каната в среде применения, что расширяет сферу применения роботов на канаты различного диаметра и объем мониторинга окружающей среды. Следовательно, настоящее изобретение является универсальным и многофункциональным.
(3) Система управления может определять координаты каждого робота в стволе скважины в режиме реального времени, так что рабочие могут с легкостью определять дефектное местоположение в стволе скважины и конкретного неисправного робота.
(4) Робот-инспектор может контролировать свою скорость обследования в режиме реального времени, отвечая требованиям к скорости обследования в различных рабочих условиях.
(5) Множество роботов-инспекторов может быть расположено в соответствии с их требованиями к обследованию для формирования сети мониторинга.
(6) Система обследования ствола скважины для сверхглубокого вертикального ствола в настоящем изобретении может осуществлять полное обследование ствола скважины, включая продольный и периферийный мониторинг.
(7) Настоящее изобретение не только может обнаруживать трещины и просачивание воды в стволе скважины, но также может выполнять мониторинг рабочих устройств в рабочей среде, обеспечивая нормальную работу рабочих устройств.
(8) Настоящее изобретение может дополнительно использовать инфракрасное сенсорное устройство, сенсорное устройство миллиметрового диапазона или радарное сенсорное устройство, необходимые для расширения функций системы, таким образом, являясь универсально применимыми и многофункциональными.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Прилагаемые графические материалы, которые составляют часть настоящего изобретения, используются для улучшения понимания настоящего изобретения. Описания устройств в примерных вариантах осуществления настоящего изобретения используются для объяснения настоящего изобретения, но не составляют неверного ограничения настоящего изобретения. На графических материалах:
на фиг. 1 представлена общая блок-схема системы обследования ствола скважины для сверхглубокого вертикального ствола согласно варианту осуществления настоящего изобретения;
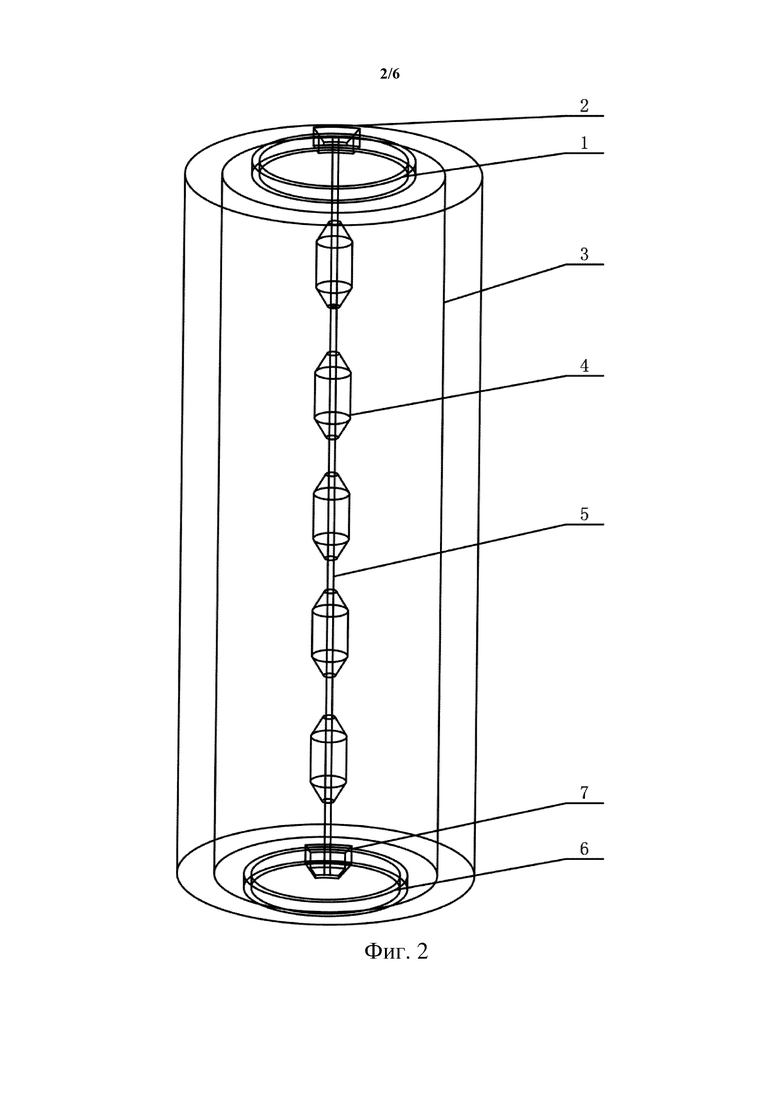
на фиг. 2 представлена структурная схема системы обследования ствола скважины для сверхглубокого вертикального ствола согласно варианту осуществления настоящего изобретения;
где цифры имеют следующие значения: 1. Поверхностная направляющая каната, 2. Поверхностное устройство перемещения каната, 3. Стенка ствола скважины, 4. Роботы-инспекторы, 5. Канат, 6. Подземная направляющая каната и 7. Подземное устройство перемещения каната;
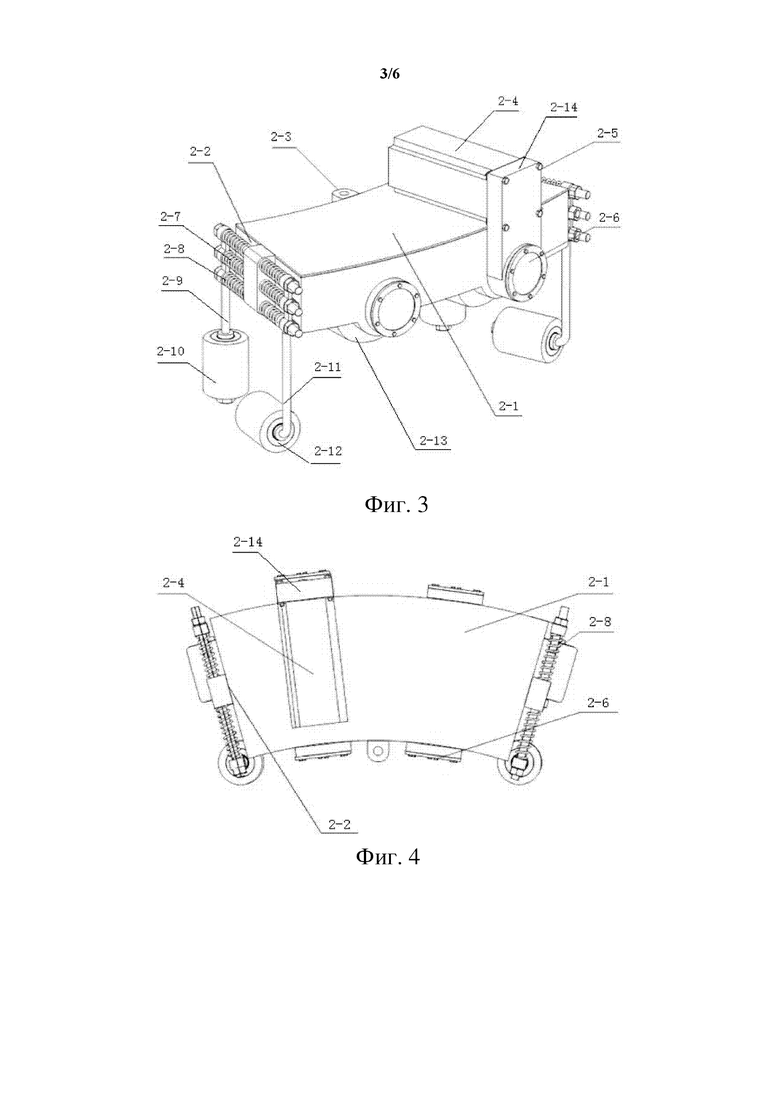
на фиг. 3 представлена структурная схема поверхностного/подземного устройства перемещения каната, показанного на фиг. 1;
на фиг. 4 представлен вид сверху поверхностного/подземного устройства перемещения каната, показанного на фиг. 1;
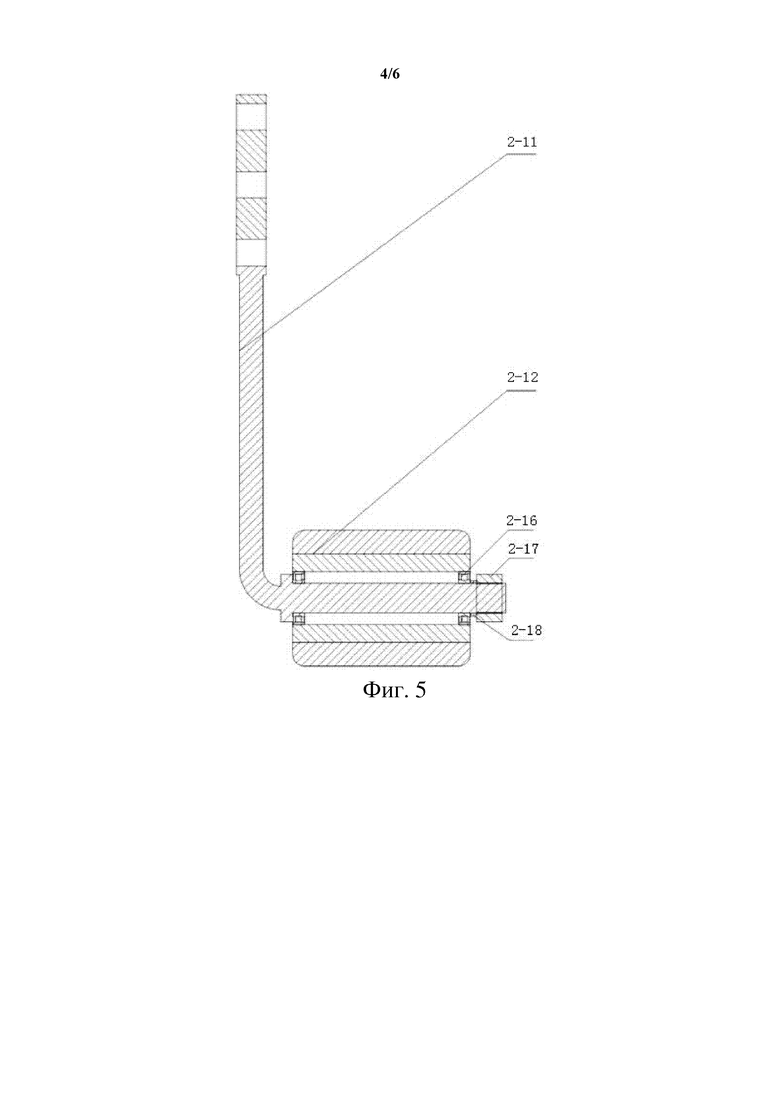
на фиг. 5 представлена структурная схема поперечного направляющего механизма;
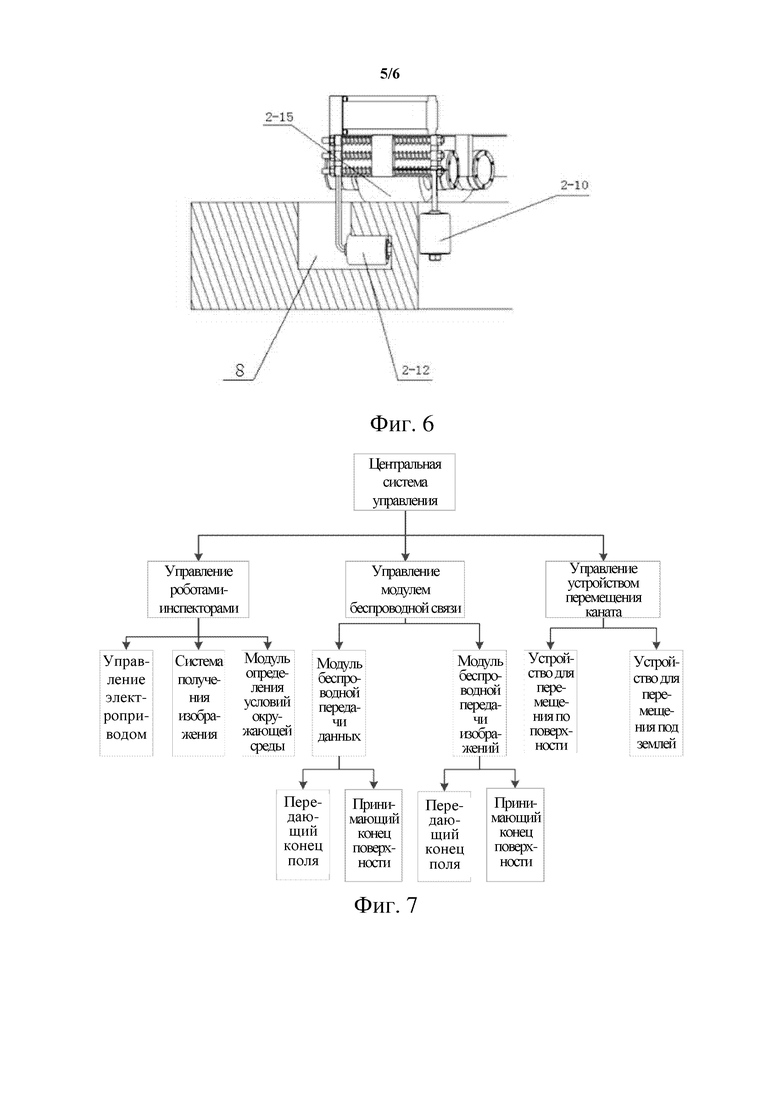
на фиг. 6 представлен увеличенный вид в поперечном разрезе конструкции, показывающий, что устройство перемещения каната установлено на дорожке перемещения каната;
где цифры имеют следующие значения: 2-1. Поверхность в форме кругового сектора корпуса, 2-2. Конец радиального сечения корпуса, 2-3. Механизм натяжения каната, 2-4. Двигатель, 2-5. Соединительный болт, 2-6. Торцевая крышка редуктора, 2-7. Пружина, 2-8. Горизонтальный стержень, 2-9. Продольная направляющая опора, 2-10. Продольный направляющий ролик, 2-11. Поперечная направляющая опора, 2-12. Поперечный направляющий ролик, 2-13. Ведомый ролик, 2-14. Редуктор, 2-15. Ведущий ролик, 2-16. Подшипник, 2-17. Ограничительная гайка поперечного направляющего ролика, 2-18. Втулка, и 8. Дорожка перемещения каната;
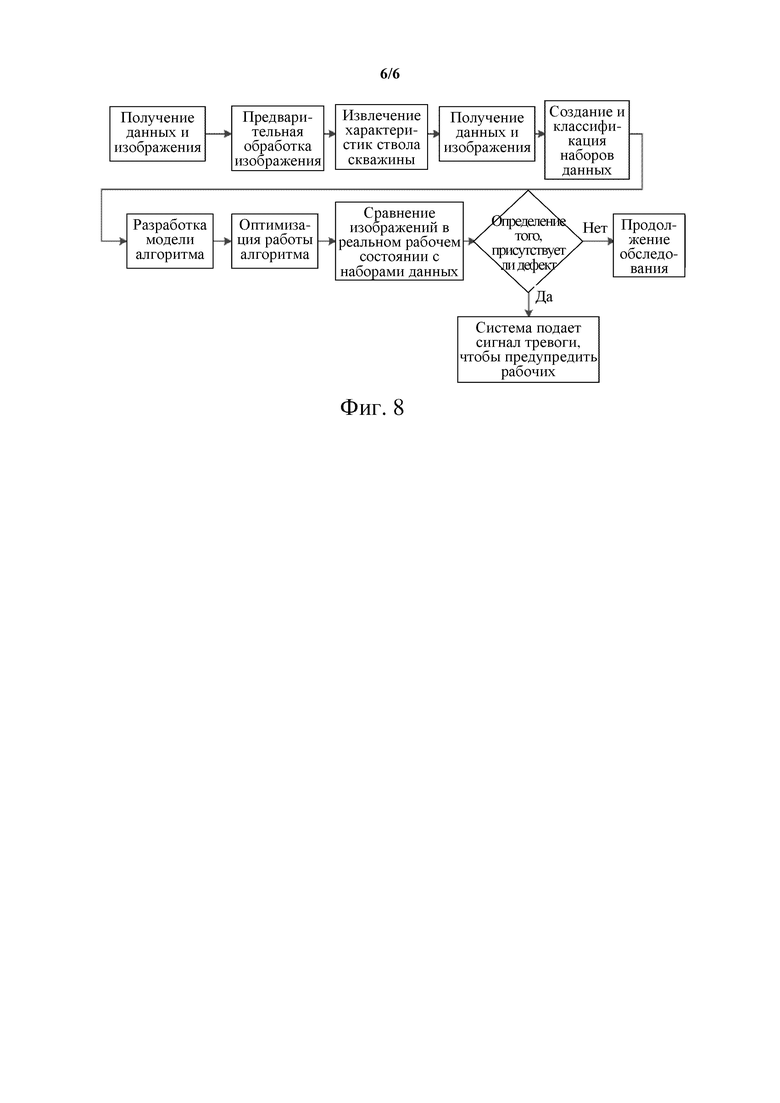
на фиг. 7 представлена композиционная блок-схема центральной системы управления системой обследования ствола скважины для сверхглубокого вертикального ствола в варианте осуществления настоящего изобретения; и
на фиг. 8 представлена блок-схема обработки изображений системой обследования ствола скважины для сверхглубокого вертикального ствола в варианте осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение дополнительно описано ниже со ссылкой на прилагаемые графические материалы.
Система обследования ствола скважины для сверхглубокого вертикального ствола содержит систему перемещения каната, роботов-инспекторов, систему получения визуального изображения, модуль беспроводной связи, центральную систему управления и систему постобработки изображений хост-компьютера.
Система перемещения каната содержит: поверхностную направляющую перемещения каната, подземную направляющую перемещения каната, поверхностное устройство перемещения каната, установленное в поверхностной направляющей перемещения каната, подземное устройство перемещения каната, установленное в подземной направляющей перемещения каната, и канат, верхний конец которого соединен с поверхностным устройством перемещения каната, а нижний конец соединен с подземным устройством перемещения каната. Канат был подвергнут регулировке натяжения. Поверхностное/подземное устройство перемещения каната должно быть установлено на место заранее перед обследованием и спроектировано с высокими взрывозащищенными характеристиками и уровнем надежности. Во время монтажа должна быть гарантирована синхронизация между поверхностными и подземными устройствами перемещения каната, чтобы обеспечить выравнивание во время движения двух устройств.
Вдоль каната размещено множество роботов-инспекторов, которые могут подниматься по канату. Каждый робот-инспектор проводит обследование в установленном объеме. Когда один или несколько роботов выходят из строя, сеть мониторинга ремонтируется в соответствии с воздействием неисправности на сеть мониторинга. Кроме того, каждый робот-инспектор может быть оснащен инфракрасным сенсорным устройством, сенсорным устройством миллиметрового диапазона или радарным сенсорным устройством по мере необходимости. Перед обследованием ствол скважины вертикально делится на секции в соответствии с его глубиной, и роботы-инспекторы отвечают за обследование в своих соответствующих участках для обеспечения эффективности обследования. Во время размещения роботов-инспекторов перед обследованием необходимо сначала определить местоположения этих роботов-инспекторов так, чтобы они располагались в своих соответствующих участках обследования перед обследованием.
Модуль беспроводной связи содержит модуль беспроводной передачи данных, модуль беспроводной передачи изображений и модуль позиционирования GPS. Модуль беспроводной передачи данных может передавать сигналы, полученные датчиками, переносимыми роботами-инспекторами, на хост-компьютер, тем самым осуществляя мониторинг роботов-инспекторов, каната и ствола скважины. Модуль беспроводной передачи изображений может передавать изображения, полученные системой получения визуальных изображений, на хост-компьютер для дальнейшей обработки.
Система получения визуального изображения содержит подчиненный компьютер и взрывозащищенные камеры. После того, как информация в виде изображений, полученная взрывозащищенными камерами, обрабатывается подчиненным компьютером, обработанное изображение передается модулем беспроводной передачи изображений в систему постобработки изображений хост-компьютера. Взрывозащищенные камеры, соответственно установленные на роботах-инспекторах, могут выполнять мониторинг ствола скважины в продольном направлении, когда роботы-инспекторы поднимаются по канату. Когда роботы-инспекторы подвешены на канате и остаются неподвижными, канат приводится в движение устройствами перемещения каната, чтобы сделать один оборот вокруг ствола скважины, таким образом выполняя мониторинг ствола скважины по окружности. Роботы также могут двигаться синхронно с устройствами перемещения каната, чтобы быстро определять целевое местоположение.
Центральная система управления подключена к роботам-инспекторам и системе перемещения каната посредством модуля беспроводной передачи данных, а роботы-инспекторы подключены к центральной системе управления посредством модуля позиционирования GPS.
Центральная система управления содержит модуль управления роботом-инспектором для контроля условий работы роботов-инспекторов; модуль управления устройством перемещения каната для управления перемещением поверхностного устройства перемещения каната и подземного устройства перемещения каната в системе перемещения каната; и модуль управления беспроводной связью для управления связью между центральной системой управления, роботами-инспекторами и системой перемещения каната. Центральная система управления в основном используется для правильной стратегической корректировки вышеупомянутых трех частей, чтобы осуществить общее обследование ствола скважины.
Система постобработки изображений хост-компьютера содержит модуль обработки стенок ствола скважины, который имеет функцию оповещения и используется для стратегического управления расположения роботов-инспекторов.
Если требуется продольный мониторинг ствола скважины, центральная система управления останавливает систему перемещения каната и запускает роботов-инспекторов, чтобы подняться вверх в продольном направлении по канату, чтобы получить продольные изображения ствола скважины с помощью взрывозащищенных камер. Если требуется мониторинг окружности ствола скважины, центральная система управления останавливает роботов-инспекторов, чтобы подвесить их на канате; и запускает систему перемещения каната для приведения в движение роботов-инспекторов на канате для получения периферических изображений ствола скважины. Если требуется мониторинг определенных местоположений в стволе скважины, центральная система управления одновременно управляет роботами-инспекторами и системой перемещения каната, пока роботы-инспекторы не достигнут целевых местоположений, а затем взрывозащищенные камеры используются для получения изображений целевых местоположений в стволе скважины.
Кроме того, система постобработки изображений хост-компьютера формирует сеть мониторинга в стволе скважины в соответствии с информацией в виде изображений, возвращаемой взрывозащищенными камерами, которые соответственно переносятся роботами-инспекторами. Если один или несколько роботов-инспекторов выходят из строя, центральная система управления использует модуль управления роботом-инспектором для автоматического управления приводными механизмами остальных нормально работающих роботов-инспекторов и использует модуль управления устройством перемещения каната для автоматического управления приводным механизмом системы перемещения каната в соответствии с воздействием неисправного робота-инспектора на сеть мониторинга, чтобы настроить объем патрулирования и мониторинга каждого нормально работающего робота-инспектора и, в дальнейшем, восстановить сеть мониторинга.
Кроме того, подземные/поверхностные устройства перемещения каната идентичны по конструкции и по отдельности содержат корпус, приводной электродвигатель и множество подвижных роликов. На корпусе предусмотрен механизм блокировки каната, способный надежно зажимать канат; и подвижные ролики содержат ведущий ролик и один или более ведомых роликов.
Каждый подвижный ролик расположен и поддерживается валом ролика, который установлен в корпусе посредством подшипника. Основание приводного электродвигателя жестко закреплено на корпусе, а конец отбора мощности приводного электродвигателя соединен посредством редуктора с валом ролика, который поддерживает ведущий ролик.
Кроме того, каждое из подземного устройства перемещения каната и поверхностного устройства перемещения каната снабжено направляющим механизмом. Направляющий механизм содержит поперечный направляющий механизм и продольный направляющий механизм. Поперечный направляющий механизм содержит поперечную направляющую опору и поперечный направляющий ролик. Поперечная направляющая опора соединена с корпусом на одном конце и, дополнительно, соединена с поперечным направляющим роликом на другом конце, а поперечный направляющий ролик расположен в осевом направлении параллельно поверхности качения, где расположены подвижные ролики. Продольный направляющий механизм содержит продольную направляющую опору и продольный направляющий ролик. Продольная направляющая опора соединена с корпусом на одном конце и дополнительно соединена с продольным направляющим роликом на другом конце, а продольный направляющий ролик расположен в осевом направлении перпендикулярно поверхности качения, где расположены подвижные ролики.
Ведущий ролик, приводимый в движение приводным электродвигателем, работает во взаимодействии с поперечным направляющим механизмом и продольным направляющим механизмом для осуществления позиционирования и направления, тем самым приводя ведомые ролики в движение, чтобы всегда перемещаться по дорожке перемещения каната.
Кроме того, основной корпус дорожки дополнительно содержит поперечную направляющую поверхность и продольную направляющую поверхность. Одна сторона поверхности качения снабжена продольной направляющей поверхностью, перпендикулярной поверхности качения, а другая ее сторона снабжена канавкой L-образной формы, образованной вертикальной секцией и поперечной секцией, которые сообщаются в месте изгиба. Направление протяжения вертикальной секции перпендикулярно поверхности качения, а отверстие вертикальной секции находится на одном уровне с поверхностью качения. Направление протяжения поперечной секции параллельно поверхности качения, а поперечная секция имеет поперечную направляющую поверхность, параллельную поверхности качения. Подвижные ролики расположены непосредственно над поверхностью качения. Поперечная направляющая опора расположена в вертикальной секции канавки, а поперечный направляющий ролик расположен в поперечной секции. Один конец поперечной направляющей опоры выступает из вертикальной секции и затем соединяется с корпусом, а другой конец поперечной направляющей опоры соединяется с поперечным направляющим роликом, зацепленным за поперечную направляющую поверхность. Поперечный направляющий ролик соединен с поперечной направляющей поверхностью посредством проволоки, а продольный направляющий ролик соединен с продольной направляющей поверхностью посредством проволоки. Ведущий ролик, приводимый в движение приводным электродвигателем, может приводить в движение поперечный направляющий ролик, чтобы он катился по поперечной направляющей поверхности, продольный направляющий ролик, чтобы он катился по продольной направляющей поверхности, и ведомые ролики, чтобы они катились по поверхности качения.
Кроме того, корпус выполнен в форме кругового сектора, а валы роликов распределены в радиальном направлении корпуса в форме кругового сектора. На двух концах радиального сечения корпуса в форме кругового сектора отдельно установлена крепежная стойка, а каждая крепежная стойка снабжена одним продольным направляющим механизмом и одним поперечным направляющим механизмом. Продольный направляющий механизм предусмотрен на конце крепежной стойки, который примыкает к внутренней круговой поверхности корпуса в форме кругового сектора; и поперечный направляющий механизм предусмотрен на конце крепежной стойки, который примыкает к внешней круговой поверхности корпуса в форме кругового сектора. Два продольных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично, и два поперечных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично. Ось продольного направляющего ролика перпендикулярна поверхности в форме кругового сектора корпуса в форме кругового сектора, а ось поперечного направляющего ролика параллельна поверхности в форме кругового сектора корпуса в форме кругового сектора. Положения, в которых продольная направляющая опора и поперечная направляющая опора расположены на крепежной стойке, могут быть отрегулированы в радиальном направлении корпуса в форме кругового сектора.
Другой технической целью настоящего изобретения является создание способа обследования ствола скважины для сверхглубокого вертикального ствола, который включает следующие этапы:
(1) Перед обследованием ствол скважины вертикально делится на секции, и каждая секция оснащается одним роботом-инспектором, так что роботы-инспекторы отвечают за обследование в своих соответствующих участках. Во время расположения роботов-инспекторов определяется информация об их местонахождении. Подземное устройство перемещения каната и поверхностное устройство перемещения каната устанавливаются перед обследованием.
(2) Во время обследования каждый робот-инспектор выполняет мониторинг ствола скважины в пределах его обозначенного участка обследования, захватывает изображения стенок ствола скважины с помощью взрывозащищенной камеры и загружает полученные изображения в систему постобработки изображений хост-компьютера. Модуль позиционирования GPS получает информацию о местоположении роботов-инспекторов в реальном времени и загружает информацию в центральную систему управления. Информация о местоположении подземного устройства перемещения каната и поверхностного устройства перемещения каната обнаруживается в реальном времени с помощью устройств определения местоположения, соответственно установленных на подземном устройстве перемещения каната и поверхностном устройстве перемещения каната, и загружается в центральную систему управления в реальном времени. Центральная система управления определяет, в соответствии с полученной в реальном времени информацией о местоположении подземного устройства перемещения каната и поверхностного устройства перемещения каната, синхронизировано ли движение двух устройств перемещения. Если их движение не синхронизировано, подземное устройство перемещения каната и поверхностное устройство перемещения каната управляются для синхронизации движения.
(3) После обследования система постобработки изображений хост-компьютера обрабатывает полученные изображения, чтобы определить, присутствует ли дефект в стволе скважины.
Вариант осуществления:
Ниже со ссылкой на сопроводительные графические материалы подробно описан конкретный вариант осуществления настоящего изобретения.
На фиг. 1 представлена общая блок-схема системы обследования ствола скважины для сверхглубокого вертикального ствола согласно варианту осуществления настоящего изобретения. Аппаратная платформа системы показана на фиг. 2, где система перемещения каната содержит поверхностную направляющую 1 каната, подземную направляющую 6 каната, поверхностное устройство 2 перемещения каната и подземное устройство 7 перемещения каната. Направляющие каната расположены соответственно на поверхности и под землей. Устройства перемещения каната соответственно расположены на направляющих каната и совершают один оборот на направляющих вокруг ствола скважины. Канат 5 жестко соединяется с устройствами перемещения каната после натяжения, и устройства перемещения каната приводят в движение канат 5, чтобы выполнить один оборот вокруг ствола скважины. Роботы-инспекторы 4 размещены на канате 5 и могут подниматься вверх по канату 5. Каждый робот-инспектор выполняет обследование в установленном объеме. Когда один или несколько роботов выходят из строя, сеть мониторинга может быть отремонтирована в соответствии с воздействием неисправности на сеть мониторинга.
Устройства перемещения каната содержат поверхностное устройство 2 перемещения каната и подземное устройство 7 перемещения каната, расположенные соответственно на поверхностной направляющей 1 каната и подземной направляющей 6 каната. Существует много способов закрепить направляющую каната на поверхности, в том числе бетон, болты, сварка и т.п.
Роботы-инспекторы 4 могут быть оснащены инфракрасным сенсорным устройством, сенсорным устройством миллиметрового диапазона или радарным сенсорным устройством при необходимости расширения функции системы.
Система получения визуального изображения содержит подчиненный компьютер и взрывозащищенные камеры. Взрывозащищенные камеры, соответственно установленные на роботах-инспекторах 4, могут выполнять мониторинг ствола скважины в продольном направлении, когда роботы-инспекторы поднимаются по канату 5. Когда роботы-инспекторы 4 подвешены на канате и остаются неподвижными, канат 5 приводится в движение устройствами перемещения каната 5, чтобы сделать один оборот вокруг ствола скважины, таким образом выполняя мониторинг ствола скважины по окружности. Роботы-инспекторы 4 также могут перемещаться синхронно с устройствами перемещения каната, чтобы быстро определять целевое местоположение.
Модуль беспроводной связи содержит модуль беспроводной передачи данных и модуль беспроводной передачи изображений. Модуль беспроводной передачи данных может передавать сигналы, полученные датчиками, переносимыми роботами-инспекторами, на хост-компьютер, тем самым осуществляя мониторинг роботов-инспекторов 4, каната 5 и ствола скважины. Модуль беспроводной передачи изображений может передавать изображения, полученные системой получения визуальных изображений, на хост-компьютер для дальнейшей обработки, чтобы дополнительно улучшить точность и эффективность обнаружения информации, избегая пропуска обследования.
Как показано на фиг. 3-6, поверхностное устройство перемещения каната/подземное устройство перемещения каната (для простоты описания совместно именуемые устройством перемещения каната) настоящего изобретения содержит корпус, приводной электродвигатель и множество подвижных роликов. Размер и количество подвижных роликов могут быть определены в соответствии с конкретной нагрузкой, а внешний край каждого подвижного ролика может быть покрыт полиуретаном или другим амортизирующим материалом для смягчения воздействия вибрирующего устройства перемещения каната на дорожке перемещения каната. На фигурах показаны два подвижных ролика.
Корпус снабжен механизмом блокировки каната, который используется для надежного зажима каната для подъема роботов. Механизм блокировки каната может быть коммерчески доступным стопором каната или может также быть другим механизмом блокировки и ограничения. Может быть предусмотрен один, два или более стопоров каната. Когда имеется только одна дорожка перемещения каната, требуются по меньшей мере два стопора каната, чтобы канат с поднимающимися по нему роботами мог с легкостью перемещаться в стволе скважины.
Подвижные ролики содержат ведущий ролик и один или более ведомых роликов (на фигуре показан только один ведомый ролик). Каждый подвижный ролик расположен и поддерживается валом ролика, который установлен в корпусе посредством подшипника. Основание приводного электродвигателя жестко закреплено на корпусе, а конец отбора мощности приводного электродвигателя соединен посредством редуктора с валом ролика, который поддерживает ведущий ролик. Приводимый в движение приводным электродвигателем, ведущий ролик может приводить ведомые ролики в движение по дорожке перемещения каната.
В частности, ведомый ролик соединен с корпусом посредством вала ролика и цилиндрический роликовый подшипник и ограничен в осевом направлении на двух концах соответственно посредством торцевых крышек подшипника. Ведущий ролик соединен с корпусом посредством вала ролика и цилиндрический роликовый подшипник; и ограничен в осевом направлении на одном конце посредством торцевой крышки подшипника и соединен с редуктором на другом конце. Момент приводного электродвигателя передается от приводного электродвигателя к ведущему ролику посредством редуктора.
Для того чтобы устройство перемещения каната могло перемещаться по дорожке перемещения каната по заданной траектории (а именно по окружности стенки ствола скважины), устройство перемещения каната по настоящему изобретению снабжено направляющим механизмом, который включает поперечный направляющий механизм и продольный направляющий механизм. Продольный направляющий механизм используется для реализации продольного (в осевом направлении ствола скважины) позиционирования между устройством перемещения каната и дорожкой перемещения каната, предотвращая таким образом боковое отклонение устройства перемещения каната. Поперечный направляющий механизм используется для реализации горизонтального (в направлении, перпендикулярном осевому направлению ствола скважины) позиционирования между устройством перемещения каната и дорожкой перемещения каната.
Поперечный направляющий механизм содержит поперечную направляющую опору и поперечный направляющий ролик. Поперечная направляющая опора соединена с корпусом на одном конце и соединена с поперечным направляющим роликом на другом конце; и поперечный направляющий ролик расположен в осевом направлении параллельно поверхности качения, где расположены подвижные ролики. В частности, как показано на фиг. 5, поперечная направляющая опора представляет собой стержень L-образной формы, который образован вертикальной секцией (секция стержня L-образной формы, параллельная осевому направлению ствола скважины) и поперечной секцией (секция стержня L-образной формы, параллельная поперечному направлению ствола скважины). Вертикальная секция соединена с корпусом, а поперечная секция снабжена заплечиком вала. Поперечная секция с внешней стороны заплечика вала снабжена роликом, а между поперечным направляющим роликом и поперечной секцией установлен подшипник. Поперечная секция с внешней стороны поперечного направляющего ролика снабжена ограничительной гайкой в виде резьбового соединения. Таким образом, можно узнать, что поперечный направляющий ролик располагают посредством заплечика вала с одной стороны и посредством ограничительной гайки с другой стороны. Продольный направляющий механизм содержит продольную направляющую опору и продольный направляющий ролик. Продольная направляющая опора соединена с корпусом на одном конце и дополнительно соединена с продольным направляющим роликом на другом конце, а продольный направляющий ролик расположен в осевом направлении перпендикулярно поверхности качения, где расположены подвижные ролики. Ведущий ролик, приводимый в движение приводным электродвигателем, работает во взаимодействии с поперечным направляющим механизмом и продольным направляющим механизмом для осуществления позиционирования и направления, тем самым приводя ведомые ролики в движение, чтобы всегда перемещаться по дорожке перемещения каната.
Для облегчения установки подвижных роликов устройства перемещения каната и направляющих роликов (включая поперечный направляющий ролик и продольный направляющий ролик) направляющего механизма, как показано на фиг. 6, дорожка перемещения каната согласно настоящему изобретению содержит поверхность качения, поперечную направляющую поверхность и продольную направляющую поверхность. Одна сторона поверхности качения снабжена продольной направляющей поверхностью, перпендикулярной поверхности качения, а другая ее сторона снабжена канавкой L-образной формы, образованной вертикальной секцией и поперечной секцией, которые сообщаются в месте изгиба. Направление протяжения вертикальной секции перпендикулярно поверхности качения, а отверстие вертикальной секции находится на одном уровне с поверхностью качения. Направление протяжения поперечной секции параллельно поверхности качения, а поперечная секция имеет поперечную направляющую поверхность, параллельную поверхности качения. Подвижные ролики расположены непосредственно над поверхностью качения. Поперечная направляющая опора расположена в вертикальной секции канавки, а поперечный направляющий ролик расположен в поперечной секции. Один конец поперечной направляющей опоры выступает из вертикальной секции и затем соединяется с корпусом, а другой конец поперечной направляющей опоры соединяется с поперечным направляющим роликом, зацепленным за поперечную направляющую поверхность. Поперечный направляющий ролик соединен с поперечной направляющей поверхностью посредством проволоки, а продольный направляющий ролик соединен с продольной направляющей поверхностью посредством проволоки. Ведущий ролик, приводимый в движение приводным электродвигателем, может приводить в движение поперечный направляющий ролик, чтобы он катился по поперечной направляющей поверхности, продольный направляющий ролик, чтобы он катился по продольной направляющей поверхности, и ведомые ролики, чтобы они катились по поверхности качения. При таком проектировании конструкции дорожка перемещения каната по настоящему изобретению может обеспечивать направляющую рабочую поверхность (а именно, поперечную направляющую поверхность и продольную направляющую поверхность) для направляющих роликов и, кроме того, обеспечивать рабочую поверхность перемещения (а именно, рабочую поверхность роликов) для подвижных роликов; и дополнительно обеспечивать монтажное пространство для поперечного направляющего механизма. Кроме того, с помощью специального способа монтажа основные части (включая корпус; и подвижные ролики, приводной электродвигатель и валы роликов, которые установлены в/на корпусе) устройства перемещения каната могут быть установлены в дорожку перемещения каната посредством поперечного направляющего механизма. Из вышеизложенного может быть известно, что поперечный направляющий механизм по настоящему изобретению не только выполняет поперечную направляющую функцию, но также соединяет основные части устройства перемещения каната и дорожку перемещения каната.
Для того чтобы устройство перемещения каната могло перемещаться по окружности вдоль стенки ствола скважины, в настоящем изобретении корпус выполнен в форме кругового сектора. Как показано на фиг. 5, согласно направлению, показанному на фиг. 5, корпус в форме кругового сектора представляет собой полузакрытый кожух, который имеет открытую нижнюю торцевую поверхность в форме кругового сектора и образован путем последовательного соединения верхней пластины в форме кругового сектора, левой боковой пластины, правой боковой пластины, передней пластины в форме дуги и задней пластины в форме дуги. Левая боковая пластина и правая боковая пластина расположены соответственно на левом и правом концах радиального сечения корпуса в форме кругового сектора; передняя пластина в форме дуги расположена на внешней круговой поверхности корпуса в форме кругового сектора; а задняя пластина в форме дуги расположена на внутренней круговой поверхности корпуса в форме кругового сектора. В этом случае приводной электродвигатель установлен непосредственно на верхней поверхности верхней пластины в форме кругового сектора, а валы роликов распределены в радиальном направлении корпуса в форме кругового сектора. Подвижные ролики могут быть видны из открытой нижней торцевой поверхности кругового сектора корпуса в форме кругового сектора, так что подвижные ролики могут непосредственно контактировать с поверхностью качения дорожки перемещения каната.
Если другой приводной электродвигатель выбирается в соответствии с другой нагрузкой, может быть добавлено основание электродвигателя, муфта или другие устройства, необходимые для фиксации приводного электродвигателя.
Для реализации соединения между направляющим механизмом и корпусом, а также для обеспечения устойчивости направляющей, два конца радиального сечения корпуса в форме кругового сектора отдельно снабжены крепежной стойкой, а каждая крепежная стойка снабжена одним продольным направляющим механизмом и одним поперечным направляющим механизмом. Продольный направляющий механизм предусмотрен на конце крепежной стойки, который примыкает к внутренней круговой поверхности корпуса в форме кругового сектора; и поперечный направляющий механизм предусмотрен на конце крепежной стойки, который примыкает к внешней круговой поверхности корпуса в форме кругового сектора. Два продольных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично, и два поперечных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично. Ось продольного направляющего ролика перпендикулярна поверхности в форме кругового сектора корпуса в форме кругового сектора, а ось поперечного направляющего ролика параллельна поверхности в форме кругового сектора корпуса в форме кругового сектора. Положения, в которых продольная направляющая опора и поперечная направляющая опора расположены на крепежной стойке, могут быть отрегулированы в радиальном направлении корпуса в форме кругового сектора.
В частности, каждая крепежная стойка содержит один или более горизонтальных стержней. Эти горизонтальные стержни распределены с равными интервалами в направлении высоты каждого конца радиального сечения корпуса в форме кругового сектора, и конец радиального сечения корпуса в форме кругового сектора снабжен фиксирующим блоком. Горизонтальные стержни поддерживаются и фиксируются посредством фиксирующего блока и расположены в радиальном направлении корпуса в форме кругового сектора. Два конца каждого горизонтального стержня отдельно соединены резьбой с помощью стопорной гайки. Продольная направляющая опора снабжена монтажными отверстиями а, соответствующими горизонтальным стержням. Горизонтальные стержни присоединены к продольной направляющей опоре через соответствующие им монтажные отверстия а, и пружина а надета на каждый горизонтальный стержень между продольной направляющей опорой и фиксирующим блоком. Пружина а расположена так, чтобы уменьшать помехи движению основных частей устройства перемещения каната, когда продольный направляющий механизм вибрирует во время работы. Поперечная направляющая опора снабжена монтажными отверстиями b, соответствующими горизонтальным стержням. Горизонтальные стержни присоединяются к поперечной направляющей опоре через соответствующие им монтажные отверстия b, и пружина b надевается на каждый горизонтальный стержень между поперечной направляющей опорой и фиксирующим блоком. Пружина b расположена так, чтобы уменьшить помехи движению основных частей устройства перемещения каната, когда поперечный направляющий механизм вибрирует во время работы.
На фиг. 7 показана центральная система управления системы по настоящему изобретению, которая реализует управление роботами-инспекторами 4, модулем беспроводной связи и устройством перемещения каната. Центральная система управления в основном используется для правильной стратегической корректировки вышеупомянутых трех частей, чтобы осуществить общее обследование ствола скважины.
На фиг. 8 представлена блок-схема обработки изображений системой настоящего изобретения, которая в основном содержит серию процедур от получения изображения на месте до мониторинга состояния ствола скважины. Процедуры в основном включают следующие этапы: получение данных и изображений; предварительная обработка изображений; извлечение характеристик ствола скважины; создание и классификация наборов данных; разработка модели алгоритма; оптимизация работы алгоритма; сравнение изображений в реальном рабочем состоянии с наборами данных; дальнейшее определение того, присутствует ли дефект в стволе скважины; и подача сигнала тревоги, чтобы предупредить рабочих, если дефект присутствует, или, в ином случае, продолжение обследования.
Настоящее изобретение имеет следующий рабочий процесс:
Первый этап - подготовительная фаза. Сначала устанавливаются поверхностная направляющая 1 каната, поверхностное устройство 2 перемещения каната, подземная направляющая 6 каната, подземное устройство 7 перемещения каната и канат 5. Направляющие для каната устанавливаются соответственно на поверхности и под землей с помощью соответствующих способов монтажа в соответствии с фактической средой применения, а канат 5 регулируется посредством устройств перемещения каната так, чтобы он был параллелен оси ствола скважины, а затем укладывается в ствол скважины. Канат в стволе прикреплен к подземному устройству 7 перемещения каната, а другой конец каната прикреплен к устройству 2 перемещения каната на поверхности после натяжения. После завершения вышеупомянутой процедуры монтажа используется центральная система управления для регулировки устройств перемещения каната таким образом, чтобы устройство 2 перемещения каната на поверхности и устройство 7 перемещения подземного каната были синхронизированы, таким образом поддерживая состояние параллельности между канатом 5 и осью ствола скважины. После этого роботы-инспекторы 4 устанавливаются на канат 5 и приводятся в движение в соответствии с инструкцией, отправляемой центральной системой управления, для перемещения в назначенные местоположения расположения. После того, как роботы-инспекторы соответственно размещены в назначенных местоположениях, центральная система управления проверяет, все ли роботы-инспекторы 4 работают нормально. Наконец, аппаратное и программное обеспечение отлаживают для устранения проблемы задержки связи и потери пакетов роботов-инспекторов 4, чтобы проверить, стабильно ли движение и правильные ли полученные данные и т.д., тем самым обеспечивая стабильную работу системы мониторинга.
Второй этап - это фаза обследования. Система мониторинга запускается для обследования ствола скважины. Каждый робот-инспектор выполняет мониторинг ствола скважины в пределах обозначенного участка обследования, захватывает изображения стенок ствола скважины и загружает полученные изображения в хост-компьютер. Кроме того, информация о местоположении в реальном времени роботов-инспекторов 4 и информация в реальном времени об устройствах перемещения каната также загружаются в хост-компьютер в реальном времени. Во время обследования устройства перемещения каната приводят канат 5 в движение, выполняя один оборот вокруг ствола скважины. Роботы-инспекторы 4 размещены на канате 5 и могут подниматься по канату 5 для мониторинга ствола скважины в пределах их соответствующих назначенных областей обследования. Посредством координации между движением роботов-инспекторов 4 вверх и движением устройств перемещения каната осуществляется общее обследование ствола скважины.
Третий этап - это фаза постобработки изображений. После того, как роботы-инспекторы 4 загружают изображения ствола скважины, захваченные во время обследования, в хост-компьютер, хост-компьютер обрабатывает полученные изображения, чтобы определить, является ли ствол скважины безопасным или нет. Обработка изображений ствола скважины включает следующие этапы: предварительная обработка изображений ствола скважины; выполнение извлечения признаков; создание и классификация наборов данных; установление соответствия между характерными точками данных; определение и анализ категорий изображений; дальнейшее определение состояния ствола скважины; и подача сигнала тревоги, чтобы предупредить рабочих, если присутствует дефект, или, в ином случае, продолжение обследования, таким образом завершая мониторинг ствола скважины в реальном времени. Методика постобработки изображений, упомянутая в настоящем изобретении, может быть относительно развитой общей методикой обработки изображений в предшествующем уровне техники, поэтому подробности в настоящем документе не описываются снова.
Выше просто описаны предпочтительные варианты осуществления настоящего изобретения. Следует отметить, что некоторые усовершенствования и модификации также могут быть выполнены специалистами в данной области техники средней квалификации без отклонения от принципа настоящего изобретения, причем усовершенствования и модификации также будут попадать под объем правовой охраны настоящего изобретения.
Раскрыты система и способ обследования ствола скважины для сверхглубокого вертикального ствола. Система обследования содержит систему перемещения каната, роботов-инспекторов, систему получения визуального изображения, модуль беспроводной связи, центральную систему управления и систему постобработки изображений хост-компьютера. Система перемещения каната содержит поверхностную направляющую каната, подземную направляющую каната, поверхностное устройство перемещения каната, подземное устройство перемещения каната и канат. Система получения визуального изображения содержит взрывозащищенные камеры. После того, как информация в виде изображений, полученная взрывозащищенными камерами, обрабатывается подчиненным компьютером, обработанное изображение передается модулем беспроводной передачи изображений в систему постобработки изображений хост-компьютера. Центральная система управления подключена к роботам-инспекторам и системе перемещения каната, и роботы-инспекторы подключены к центральной системе управления. Изобретение позволяет осуществлять мониторинг ствола скважины шахты при соблюдении требований взрывозащиты в угольной шахте, реализуя мониторинг окружающей среды в реальном времени. 2 н. и 5 з.п. ф-лы, 8 ил.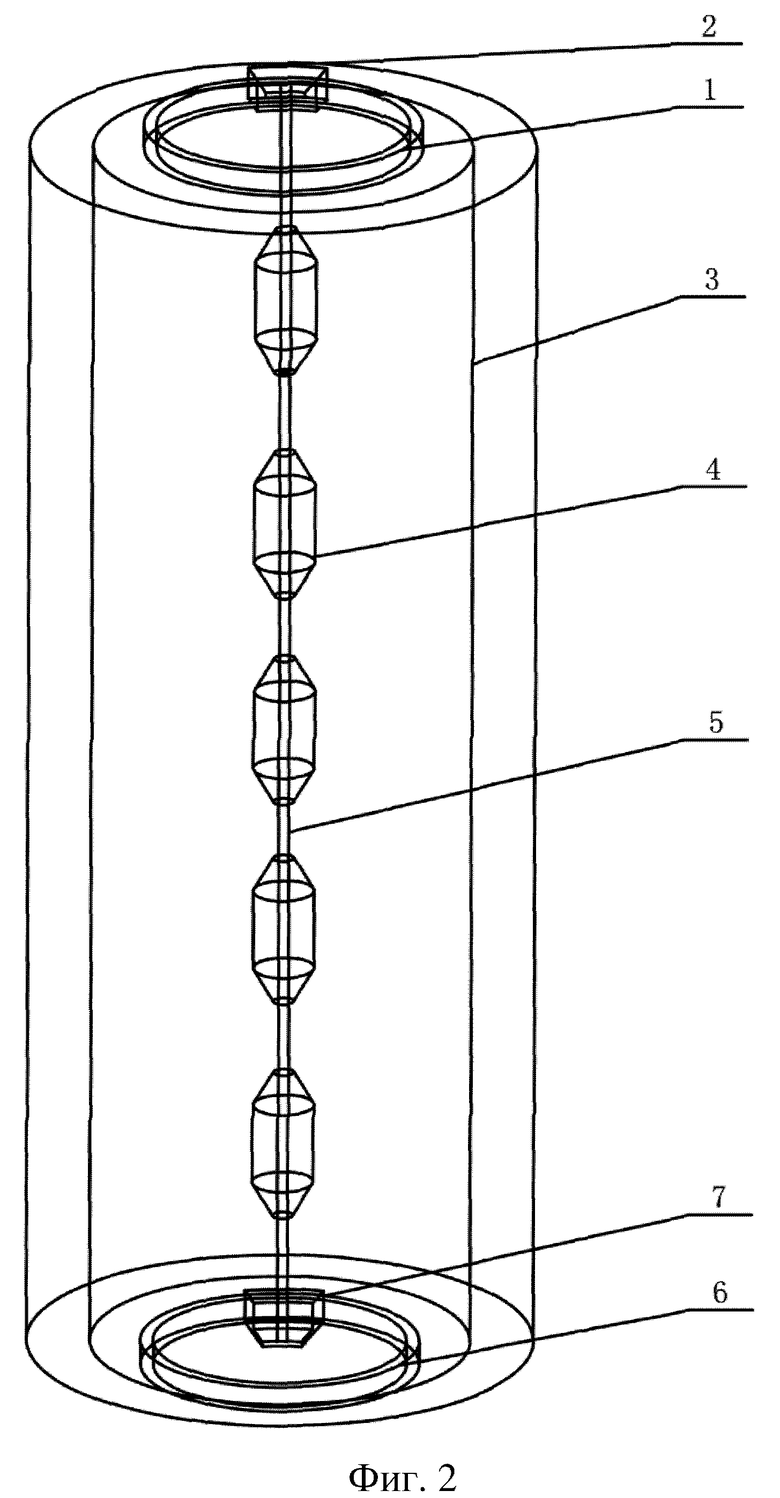
1. Система обследования ствола скважины для сверхглубокого вертикального ствола, содержащая систему перемещения каната, роботов-инспекторов, систему получения визуального изображения, модуль беспроводной связи, центральную систему управления и систему постобработки изображений хост-компьютера, при этом
система перемещения каната содержит: поверхностную направляющую перемещения каната на поверхности, подземную направляющую перемещения каната, поверхностное устройство перемещения каната, установленное в поверхностной направляющей перемещения каната, подземное устройство перемещения каната, установленное в подземной направляющей перемещения каната, и канат, верхний конец которого соединен с поверхностным устройством перемещения каната, а нижний конец соединен с подземным устройством перемещения каната; и вдоль каната размещено множество роботов-инспекторов;
модуль беспроводной связи содержит модуль беспроводной передачи данных, модуль беспроводной передачи изображений и модуль позиционирования GPS;
система получения визуального изображения содержит подчиненный компьютер и взрывозащищенные камеры; после того, как информация в виде изображений, полученная взрывозащищенными камерами, обрабатывается подчиненным компьютером, обработанное изображение передается модулем беспроводной передачи изображений в систему постобработки изображений хост-компьютера;
центральная система управления подключена к роботам-инспекторам и системе перемещения каната посредством модуля беспроводной передачи данных, а роботы-инспекторы подключены к центральной системе управления посредством модуля позиционирования GPS;
центральная система управления содержит модуль управления роботом-инспектором для контроля условий работы роботов-инспекторов; модуль управления устройством перемещения каната для управления перемещением поверхностного устройства перемещения каната и подземного устройства перемещения каната в системе перемещения каната; и модуль управления беспроводной связью для управления связью между центральной системой управления, роботами-инспекторами и системой перемещения каната; а также
при необходимости продольного мониторинга ствола скважины, центральная система управления останавливает систему перемещения каната и запускает роботов-инспекторов для подъема в продольном направлении по канату, чтобы получить продольные изображения ствола скважины с помощью взрывозащищенных камер; при необходимости мониторинга окружности ствола скважины, центральная система управления останавливает роботов-инспекторов для остановки роботов-инспекторов на канате; и запускает систему перемещения каната для приведения в движение роботов-инспекторов на канате для получения изображений окружности ствола скважины; и при необходимости мониторинга определенных местоположений в стволе скважины, центральная система управления одновременно управляет роботами-инспекторами и системой перемещения каната, пока роботы-инспекторы не достигнут целевых местоположений, а затем взрывозащищенные камеры используются для получения изображений целевых местоположений в стволе скважины.
2. Система обследования ствола скважины для сверхглубокого вертикального ствола по п. 1, отличающаяся тем, что система постобработки изображений хост-компьютера формирует сеть мониторинга в стволе скважины в соответствии с информацией в виде изображений, возвращаемой взрывозащищенными камерами, соответственно переносимыми роботами-инспекторами; если один или несколько роботов-инспекторов выходят из строя, центральная система управления использует модуль управления роботом-инспектором для автоматического управления приводными механизмами остальных нормально работающих роботов-инспекторов и использует модуль управления устройством перемещения каната для автоматического управления приводным механизмом системы перемещения каната в соответствии с воздействием неисправного робота-инспектора на сеть мониторинга, чтобы настроить объем патрулирования и мониторинга каждого нормально работающего робота-инспектора и в дальнейшем восстановить сеть мониторинга.
3. Система обследования ствола скважины для сверхглубокого вертикального ствола по п. 1, отличающаяся тем, что
подземные и поверхностные устройства перемещения каната идентичны по конструкции и по отдельности содержат корпус, приводной электродвигатель и множество подвижных роликов; на корпусе предусмотрен механизм блокировки каната, способный надежно зажимать канат; и подвижные ролики содержат ведущий ролик и один или более ведомых роликов; а также
каждый подвижный ролик расположен и поддерживается валом ролика, который установлен в корпусе посредством подшипника; основание приводного электродвигателя жестко закреплено на корпусе, а конец отбора мощности приводного электродвигателя соединен посредством редуктора с валом ролика, который поддерживает ведущий ролик.
4. Система обследования ствола скважины для сверхглубокого вертикального ствола по п. 3, отличающаяся тем, что каждое из подземного устройства перемещения каната и поверхностного устройства перемещения каната имеет направляющий механизм; направляющий механизм содержит поперечный направляющий механизм и продольный направляющий механизм; поперечный направляющий механизм содержит поперечную направляющую опору и поперечный направляющий ролик; поперечная направляющая опора соединена с корпусом на одном конце и дополнительно соединена с поперечным направляющим роликом на другом конце, а поперечный направляющий ролик расположен в осевом направлении параллельно поверхности качения, где расположены подвижные ролики; продольный направляющий механизм содержит продольную направляющую опору и продольный направляющий ролик; продольная направляющая опора соединена с корпусом на одном конце и дополнительно соединена с продольным направляющим роликом на другом конце, а продольный направляющий ролик расположен в осевом направлении перпендикулярно поверхности качения, где расположены подвижные ролики; а также
ведущий ролик, приводимый в движение приводным электродвигателем, работает во взаимодействии с поперечным направляющим механизмом и продольным направляющим механизмом для осуществления позиционирования и направления, тем самым приводя ведомые ролики в движение, чтобы всегда перемещаться по дорожке перемещения каната.
5. Система обследования ствола скважины для сверхглубокого вертикального ствола по п. 4, отличающаяся тем, что основной корпус дорожки дополнительно содержит поперечную направляющую поверхность и продольную направляющую поверхность; одна сторона поверхности качения снабжена продольной направляющей поверхностью, перпендикулярной поверхности качения, а другая ее сторона снабжена канавкой L-образной формы, образованной вертикальной секцией и поперечной секцией, которые сообщаются в месте изгиба; направление протяжения вертикальной секции перпендикулярно поверхности качения, а отверстие вертикальной секции находится на одном уровне с поверхностью качения; направление протяжения поперечной секции параллельно поверхности качения, а поперечная секция имеет поперечную направляющую поверхность, параллельную поверхности качения; подвижные ролики предусмотрены непосредственно над поверхностью качения; поперечная направляющая опора расположена в вертикальной секции канавки, а поперечный направляющий ролик расположен в поперечной секции; один конец поперечной направляющей опоры выступает из вертикальной секции и затем соединяется с корпусом, а другой конец поперечной направляющей опоры соединяется с поперечным направляющим роликом, зацепленным за поперечную направляющую поверхность; поперечный направляющий ролик соединен с поперечной направляющей поверхностью посредством проволоки, и продольный направляющий ролик соединен с продольной направляющей поверхностью посредством проволоки; и ведущий ролик, приводимый в движение приводным электродвигателем, может приводить в движение поперечный направляющий ролик, чтобы он катился по поперечной направляющей поверхности, продольный направляющий ролик, чтобы он катился по продольной направляющей поверхности, и ведомые ролики, чтобы они катились по поверхности качения.
6. Система обследования ствола скважины для сверхглубокого вертикального ствола по п. 5, отличающаяся тем, что корпус выполнен в форме кругового сектора, а валы роликов распределены в радиальном направлении корпуса в форме кругового сектора; два конца радиального сечения корпуса в форме кругового сектора отдельно снабжены крепежной стойкой, причем каждая крепежная стойка снабжена одним продольным направляющим механизмом и одним поперечным направляющим механизмом; продольный направляющий механизм предусмотрен на конце крепежной стойки, примыкающем к внутренней круговой поверхности корпуса в форме кругового сектора; и поперечный направляющий механизм предусмотрен на конце крепежной стойки, который примыкает к внешней круговой поверхности корпуса в форме кругового сектора; два продольных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично, и два поперечных направляющих механизма, соответственно предусмотренных на двух концах радиального сечения корпуса в форме кругового сектора, расположены симметрично; ось продольного направляющего ролика перпендикулярна поверхности в форме кругового сектора корпуса в форме кругового сектора, а ось поперечного направляющего ролика параллельна поверхности в форме кругового сектора корпуса в форме кругового сектора; местоположения, в которых продольная направляющая опора и поперечная направляющая опора расположены на крепежной стойке, могут быть отрегулированы в радиальном направлении корпуса в форме кругового сектора.
7. Способ обследования ствола для сверхглубокого вертикального ствола, включающий следующие этапы:
(1) перед обследованием, вертикальное разделение ствола скважины на секции и оснащение каждой секции одним роботом-инспектором, чтобы роботы-инспекторы отвечали за обследование в своих соответствующих участках; определение информации о местоположении роботов-инспекторов во время расположения роботов-инспекторов; и дальнейшее позиционирование подземного устройства перемещения каната и поверхностного устройства перемещения каната перед обследованием;
(2) во время обследования, мониторинг каждым роботом-инспектором ствола скважины в пределах обозначенного участка обследования, захват изображений стенок ствола скважины с помощью взрывозащищенной камеры и загрузка полученных изображений в систему постобработки изображений хост-компьютера; получение с помощью модуля позиционирования GPS информации о местоположении в реальном времени роботов-инспекторов и загрузка информации в центральную систему управления; обнаружение информации о местоположении подземного устройства перемещения каната и поверхностного устройства перемещения каната в режиме реального времени с помощью устройств определения местоположения, соответственно установленных на подземном устройстве перемещения каната и поверхностном устройстве перемещения каната, и загрузка информации в центральную систему управления в реальном времени; определение центральной системой управления в соответствии с полученной в реальном времени информацией о местоположении подземного устройства перемещения каната и поверхностного устройства перемещения каната, синхронизированы ли два устройства перемещения в движении; и если они не синхронизированы в движении, управление подземным устройством перемещения каната и поверхностным устройством перемещения каната для синхронизации движения; а также
(3) после обследования, обработку с помощью системы постобработки изображений хост-компьютера полученных изображений для определения того, присутствует ли дефект в стволе скважины.
| CN 105035200 A, 11.11.2015 | |||
| CN 206483617 U, 12.09.2017 | |||
| US 20170313369 A1, 02.11.2017 | |||
| Устройство автоматизированного геотехнического мониторинга для подземных трубопроводов | 2017 |
|
RU2672243C1 |
| Способ пользования пеногонными огнетушителями | 1926 |
|
SU4954A1 |

