ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение относится к области робототехники, а именно к взрывозащищенному шагающему роботу.
УРОВЕНЬ ТЕХНИКИ
[0002] По мере развития интеллектуального оборудования роботы все больше используются в работе и в жизни людей. Роботы бывают колесными и шагающими, а благодаря лучшей адаптации к местности шагающие роботы широко применяются в таких сценариях, как обход.
[0003] Наиболее близким к изобретению по технической сущности является взрывозащищенный четвероногий робот с управлением гидронасосом (патент CN 202222609655.1), содержащий гидравлическую и механическую конструкцию. В механическую конструкцию включены взрывозащищенная камера и узел ног, состоящий из бокового блока, тазобедренного и коленного узла. Гидравлическая конструкция имеет аккумулятор и приводной блок, включающий последовательно подключаемые сервомотор, гидронасос и гидроцилиндр. Каждый из бокового блока, узла бедра и колена отдельно управляем приводным блоком.
[0004] Недостаток данного патента заключается в том, что взрыв может быть вызван эксплуатацией электродвигателей разных узлов четвероногого робота, не обладающего взрывозащищенной функцией при обходе в пожароопасной и взрывоопасной среде.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] С целью решения проблемы, заключающейся в том, что электроуправление робота не имеет взрывозащиты при работе в пожароопасной и взрывоопасной среде, настоящее изобретение предоставляет взрывозащищенного шагающего робота с электрогидравлическим комбинированным приводом, применяющего следующие технические решения.
[0006] Взрывозащищенный шагающий робот содержит узел управления и ноги в сборе, при этом узел управления содержит корпус, заполненный защитным газом под давлением, и блок управления для соединения ног в сборе с корпусом; при этом ноги в сборе содержат гидроцилиндр, причем в корпусе размещен сервонасос, гидроцилиндр расположен вне корпуса, стенка корпуса снабжена отверстиями для входа и выхода масла, выполненными с возможностью подключения сервонасоса к гидроцилиндру,
при этом ноги в сборе содержат монтажную опору, механизм переднего и заднего качания ног, механизм тазобедренного сустава и механизм ног, при этом посредством монтажной опоры вне корпуса соединены механизм переднего и заднего качания ног и механизм тазобедренного сустава, при этом механизм тазобредренного сустава соединен с механизмом ног и выполнен с возможностью приведения механизма ног к внутреннему и наружному боковому качанию, а механизм переднего и заднего качания ног соединен с механизмом тазобедренного сустава посредством передачи с возможностью вращения механизма тазобедренного сустава;
при этом механизм переднего и заднего качания ног соединен с механизмом тазобедренного сустава посредством соосной передачи;
при этом механизм тазобедренного сустава содержит соединительную деталь (4) и механизм (5) привода бокового качания, причем соединительная деталь (4) вращательно соединена с монтажной опорой (2), между соединительной деталью (4) и механизмом ног расположен механизм (5) привода бокового качания, и механизм (5) привода бокового качания выполнен с возможностью передачи силы механизму ног для внутреннего и наружного бокового качания;
при этом на соединительной детали (4) размещена ведомая шестерня (44) с возможностью коаксиального фиксированного соединения, механизм (3) переднего и заднего качания ног содержит узел ведущей шестерни и силовой узел, при этом узел ведущей шестерни вращательно соединен с монтажной опорой (2) и выполнен в зацеплении с ведомой шестерней (44), и силовой узел выполнен с возможностью приведения узла ведущей шестерни во вращение;
при этом силовой узел содержит первый гидроцилиндр (31), первый рельс (32) скольжения, блок (53) скольжения и первый шатун (35), при этом на монтажной опоре (2) закреплен первый рельс (32) скольжения, направление по длине которого перпендикулярно вращательной оси соединительной детали (4); корпус (911) первого гидроцилиндра (31) закреплен на монтажной опоре (2), поршневой шток (311) первого гидроцилиндра (31) соединен с блоком (53) скольжения и выполнен с возможностью приведения блока (53) скольжения в перемещение относительно первого рельса (32) скольжения; и один конец первого шатуна (35) шарнирно соединен с блоком (53) скольжения, в то время как другой конец первого шатуна (35) соединен с узлом ведущей шестерни эксцентричным вращением; и
при этом робот снабжен электрогидравлическим комбинированным приводом.
[0007] В предпочтительном варианте осуществления соединительная деталь содержит монтажную трубу и пару плеч, при этом пара плеч установлена вдоль оси монтажной трубы и закреплена на другом конце монтажной трубы, при этом монтажная труба вращательно соединена с монтажной опорой, один конец плеч удален от монтажной трубы и снабжен отверстием вала, ось которого расположена перпендикулярно оси монтажной трубы.
[0008] В предпочтительном варианте осуществления механизм привода бокового качания содержит второй гидроцилиндр, второй рельс скольжения, блок скольжения и второй шатун, при этом второй рель скольжения закреплен вдоль оси на внутренней стенке монтажной трубы; второй гидроцилиндр соединен с одним концом монтажной трубы, удаленным от плеч; второй гидроцилиндр выполнен с возможностью приведения блока скольжения в перемещение относительно второго рельса скольжения, и один конец второго шатуна шарнирно соединен с блоком скольжения, в то время как другой конец второго шатуна выходит из монтажной трубы к плечам.
[0009] В предпочтительном варианте осуществления в корпусе размещен первый сервонасос, корпус снабжен боковой стенкой, выполненной с проходящими первым отверстием для выхода масла и вторым отверстием для входа масла, выполненными с возможностью присоединения к первому сервонасосу и первому гидроцилиндру.
[0010] В предпочтительном варианте осуществления в корпусе размещен второй сервонасос, механизм тазобедренного сустава содержит второй гидроцилиндр, а корпус снабжен боковой стенкой, выполненной с отверстиями для входа и выхода масла, выполненными с возможностью соединения второго сервонасоса со вторым гидроцилиндром.
[0011] В предпочтительном варианте осуществления на монтажной опоре предусмотрен первый масляный канал, выполненный с возможностью соединения первого отверстия для выхода масла и первого отверстия для входа масла соответственно.
[0012] В предпочтительном варианте осуществления в корпусе размещен третий сервонасос, механизм ног содержит третий гидроцилиндр, корпус снабжен боковой стенкой, выполненной со вторым отверстием для выхода масла и вторым отверстием для входа масла, выполненными с возможностью соединения с третьим сервонасосом.
[0013] В предпочтительном варианте осуществления на монтажной опоре дополнительно предусмотрен второй масляный канал, выполненный с возможностью соединения второго отверстия для выхода масла и второго отверстия для входа масла соответственно, и второй масляный канал прикреплен к третьему гидроцилиндру.
[0014] В предпочтительном варианте осуществления на двух концах отверстий для входа и выхода масла корпуса предусмотрены уплотнительные кольца.
[0015] В предпочтительном варианте осуществления в корпусе предусмотрена уплотнительная канавка для уплотнительного кольца.
[0016] В предпочтительном варианте осуществления механизм ног содержит бедро, голень и коленный сустав; при этом бедро вращательно соединено с голенью; при этом коленный сустав содержит третий гидроцилиндр, первую соединительную часть и вторую соединительную часть; при этом корпус третьего гидроцилиндра вращательно соединен с бедром; при этом другой конец первой соединительной части вращательно соединен с бедром; при этом другой конец второй соединительной части вращательно соединен с голенью; и при этом точка вращающейся оси между бедром и голенью, точка вращающейся оси между первой соединительной частью и бедром, точка вращающейся оси между второй соединительной частью и голенью, а также точка вращающейся оси между первой соединительной частью и второй соединительной частью образуют четырехугольник.
[0017] В предпочтительном варианте осуществления механизм ног содержит сустав стопы, при этом сустав стопы содержит чехол и пружинящий внутренний мешок, расположенный в чехле, а внутренний мешок соединен с датчиком давления.
[0018] В предпочтительном варианте осуществления на корпусе установлено по меньшей мере одно из следующего: лазерный дальномер, RTK антенна, взрывозащищенная кнопка и взрывобезопасный звуковой и световой сигнализатор.
[0019] В предпочтительном варианте осуществления вокруг лазерного дальномера размещен стеклянный колпак для уплотнения.
[0020] В предпочтительном варианте осуществления кабель RTK антенны, взрывобезопасной кнопки, взрывобезопасного звукового и светового сигнализатора являются взрывозащищенными, а места прохождения кабеля через корпус покрывают клеем для уплотнения.
[0021] В соответствии с вышеуказанными техническими решениями изобретение, содержащее корпусе, заполненный защитным газом под давлением обеспечивает защиту электрических элементов в корпусе от наружного взрывоопасного и пожароопасного газа, что выполняет функцию взрывозащиты. Благодаря расположению гидроцилиндра снаружи корпуса, а блока управления и сервонасоса в корпусе достигается эффект разделения электричества и гидравлики в системе электрогидравлического привода, что исключает возможность взрыва при контакте взрывоопасных и пожароопасных газов с электричеством и робот обеспечен возможностью взрывозащиты.
[0022] Соединение механизма переднего и заднего качания ног и механизма тазобедренного сустава посредством соосной передачи полезно для оптимизации алгоритма программы управления роботом.
[0023] Упрощенная теория алгоритма управления описана следующим образом на примере привода двух соседних суставов: трехмерная прямоугольная система координат 1 (x1, y1, z1) вращается углом θ1 вокруг оси z1, трехмерная прямоугольная система координат 2 (x2, y2, z2) вращается углом θ2 вокруг оси x2, как правило, при трансформации двух суставов координат 1 выполнен в виде справочного координата, пространственная координата 2 относительно системы координат 1 представлена следующим образом:  . При пересечении осей двух суставов в одной точке, то есть при совпадении начальной точки двухсуставной системы координат, x2, y2, z2, представляющие расстояние между начальной точкой и двухсуставной системой координат равны 0, что позволяет упростить представление матрицы в программном обеспечении управления приводом, и упрощенные пространственные координаты представлены следующим образом:
. При пересечении осей двух суставов в одной точке, то есть при совпадении начальной точки двухсуставной системы координат, x2, y2, z2, представляющие расстояние между начальной точкой и двухсуставной системой координат равны 0, что позволяет упростить представление матрицы в программном обеспечении управления приводом, и упрощенные пространственные координаты представлены следующим образом:
 .
.
[0024] Технический результат изобретения проявляется в том, что во-первых, робот характеруется взрывозащитой на основе решения о разделении электричества и гидравлики в корпусе, заполненном защитным газом под давлением, во-вторых, снижение сложности алгоритма программы управления при помощи соосной передачи для ног в сборе робота.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
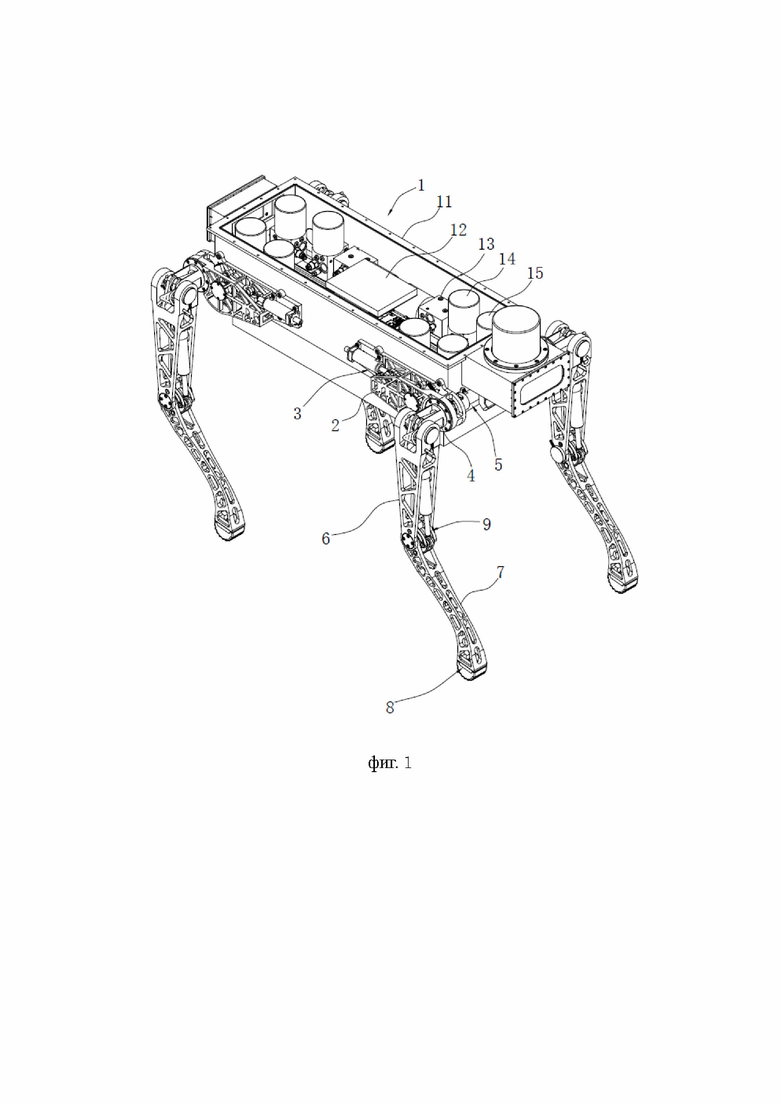
[0025] На фиг. 1 представлена конструктивная схема взрывозащищенного шагающего робота с электрогидравлическим комбинированным приводом на примере изобретения.
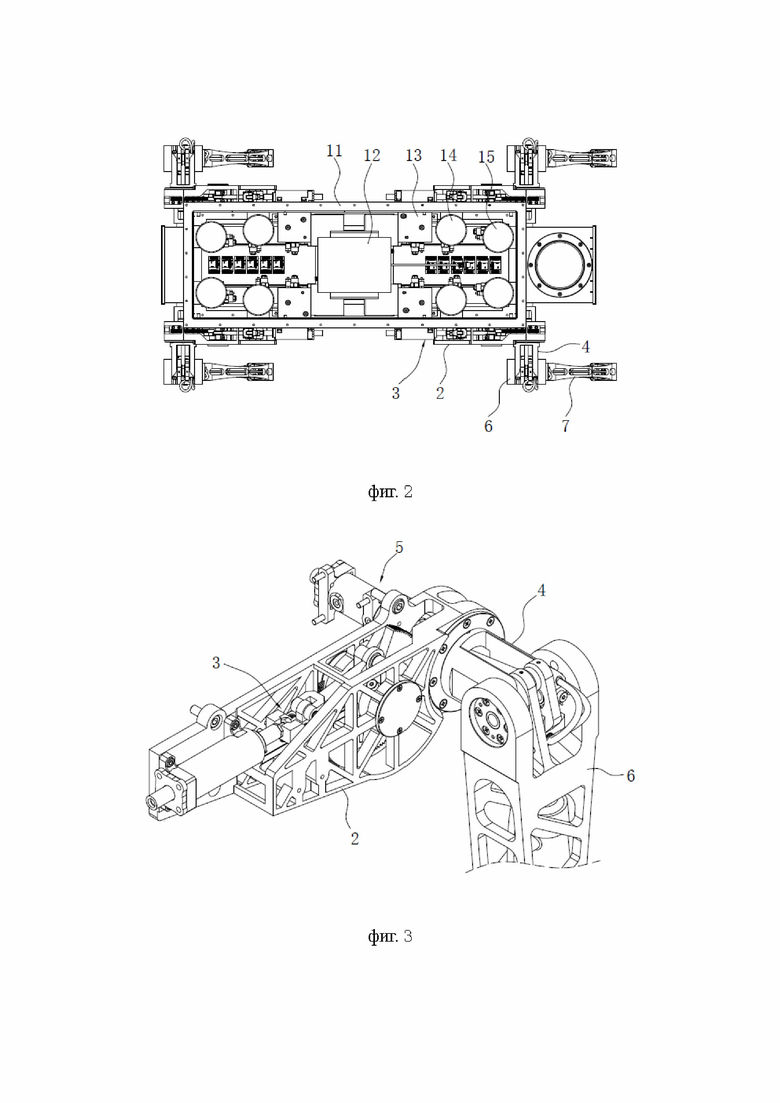
[0026] На фиг. 2 представлен вид сбоку с фиг. 1.
[0027] На фиг. 3 представлена конструктивная схема ног в сборе робота на примере изобретения.
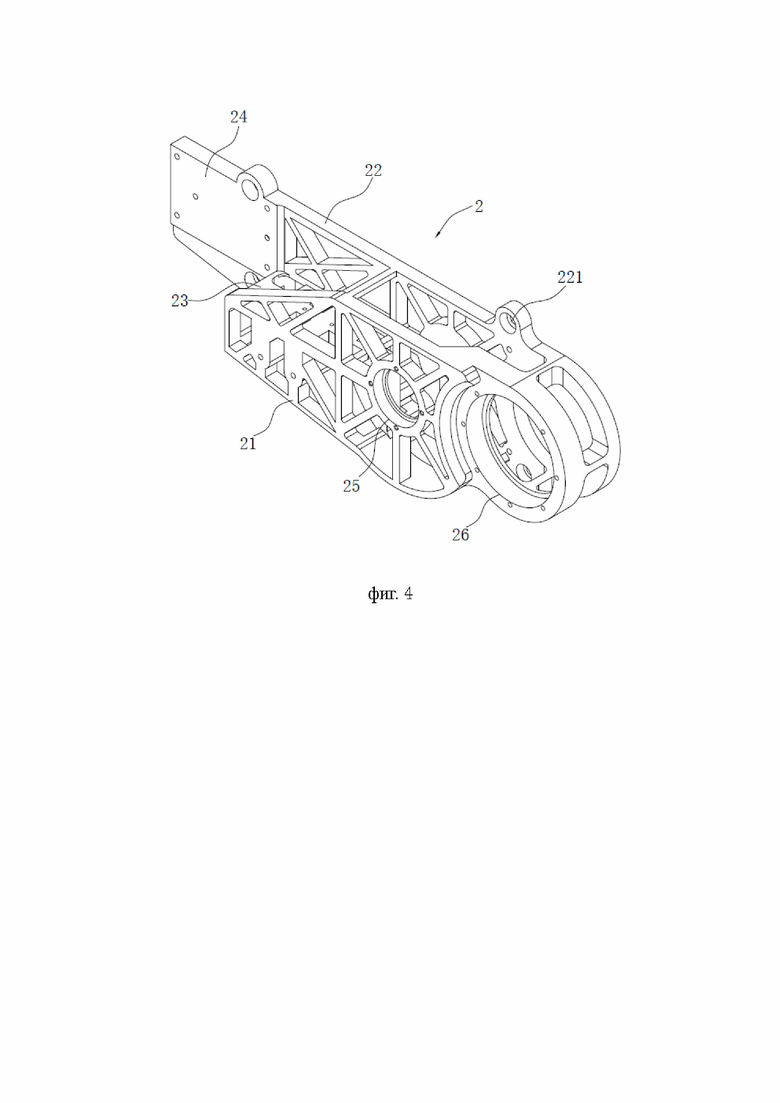
[0028] На фиг. 4 представлена конструктивная схема монтажной опоры.
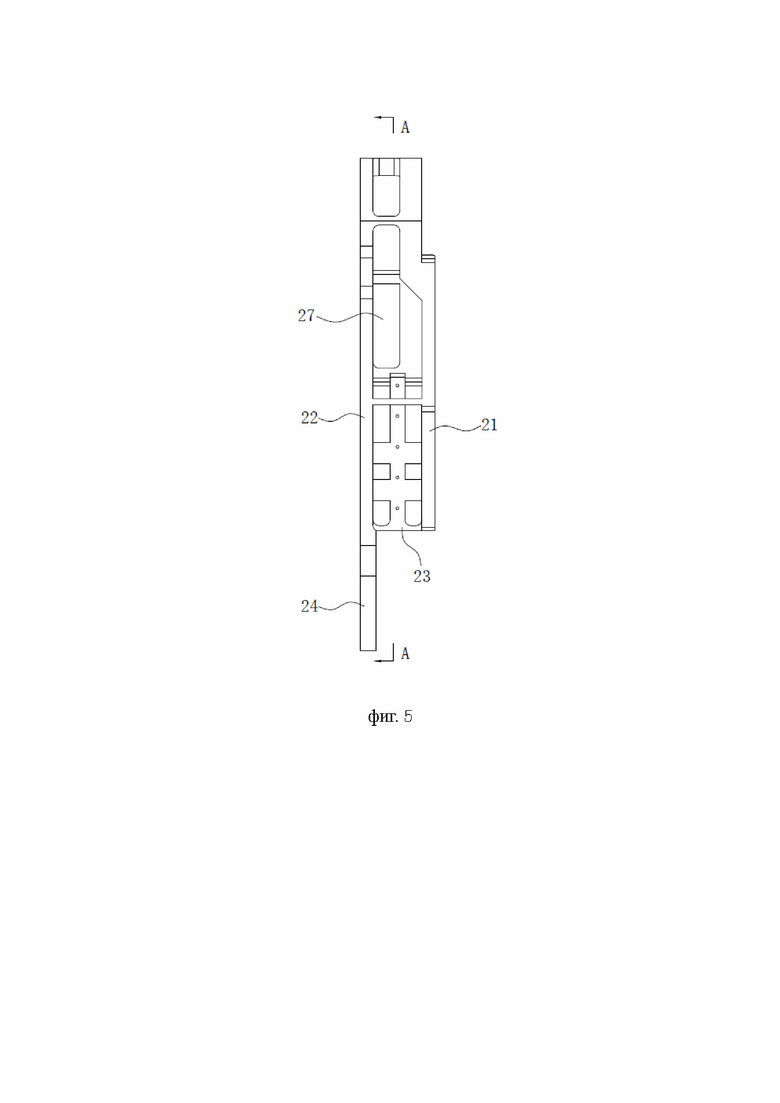
[0029] На фиг. 5 представлен вид сверху с фиг. 4.
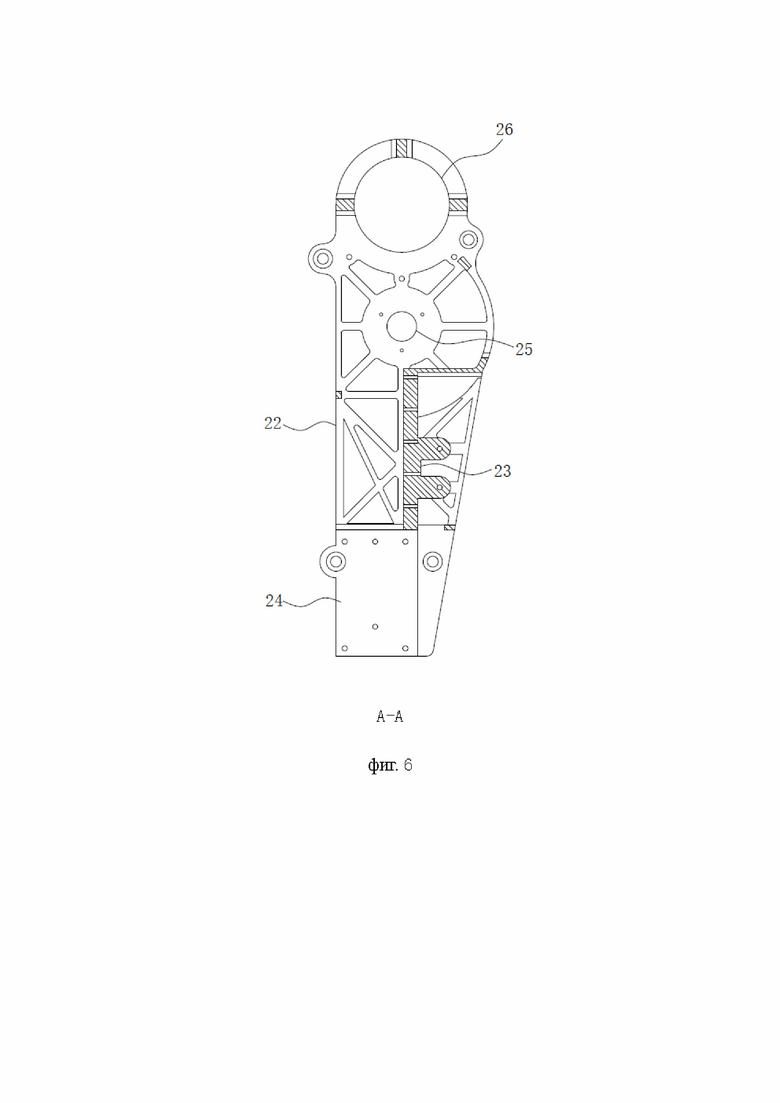
[0030] На фиг. 6 представлен вид разрезов в направлении A-A с фиг. 5.
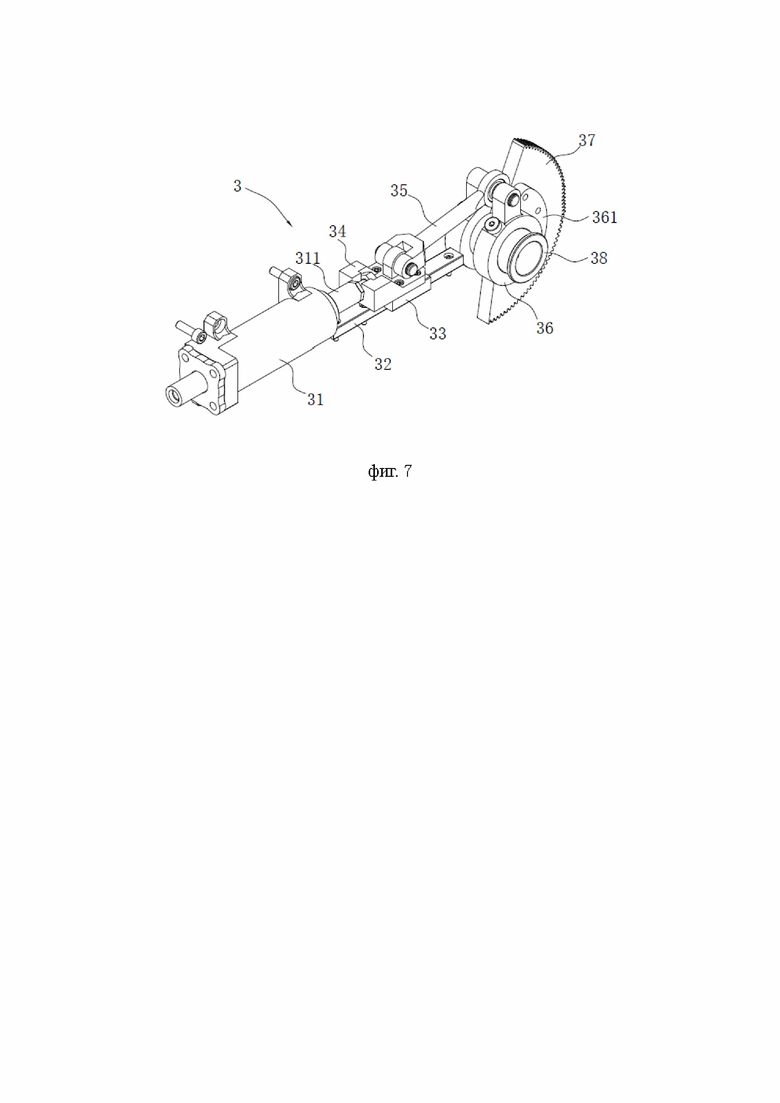
[0031] На фиг. 7 представлена конструктивная схема механизма переднего и заднего качания ног.
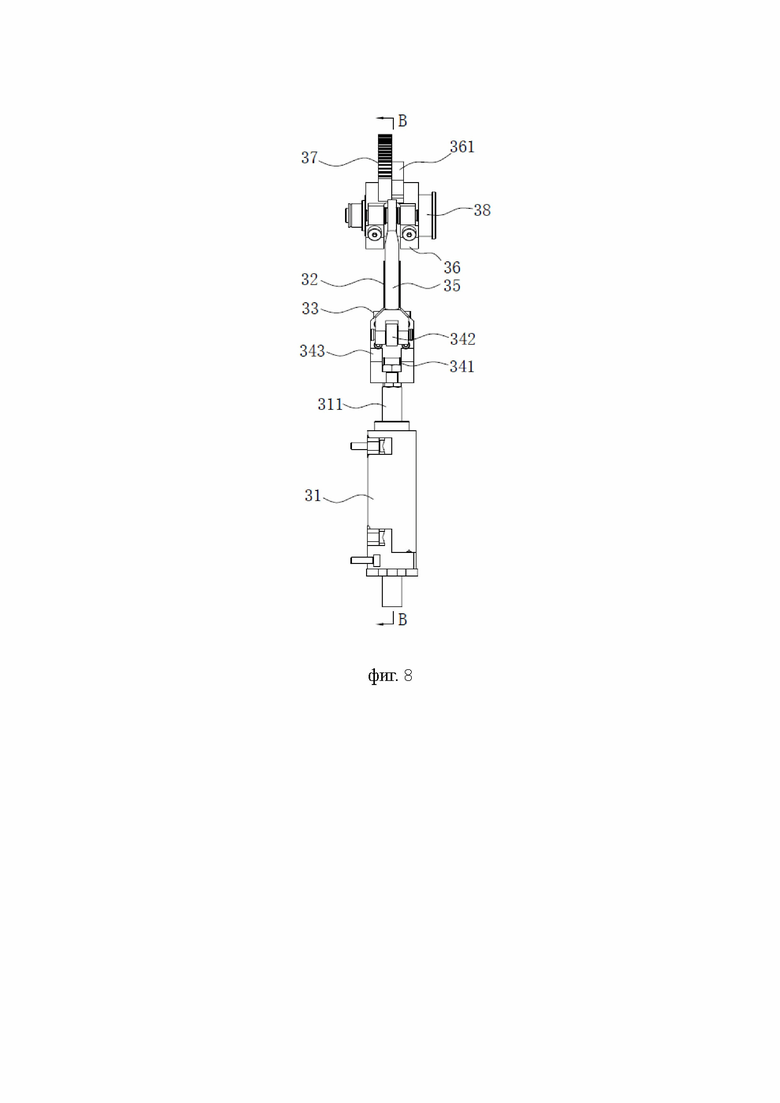
[0032] На фиг. 8 представлен вид сверху с фиг. 7.
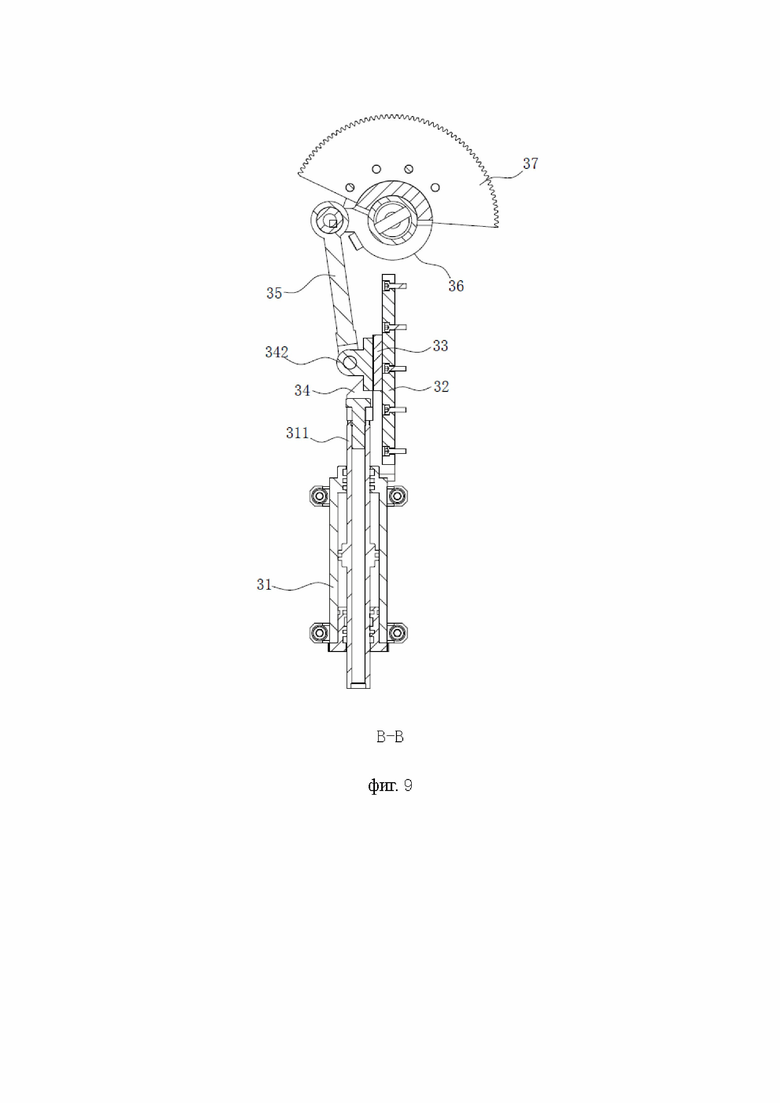
[0033] На фиг. 9 представлен вид разрезов в направлении В-В с фиг. 8.
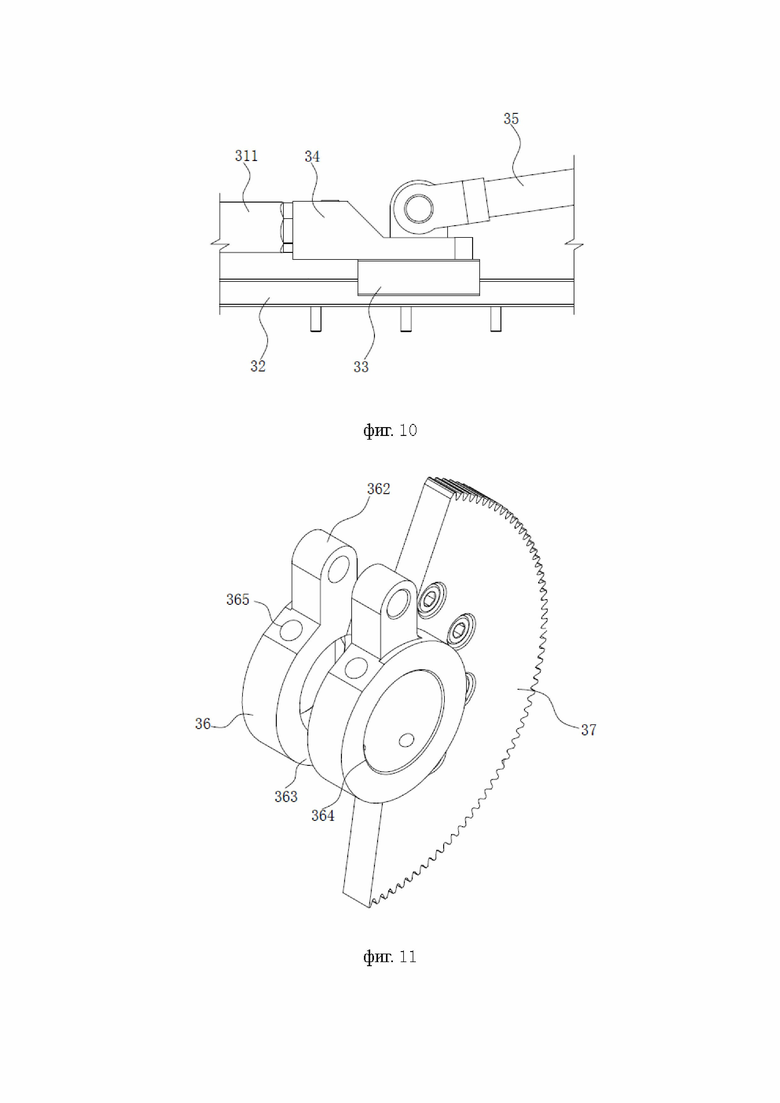
[0034] На фиг. 10 представлена конструктивная схема подключения к блоку скольжения.
[0035] На фиг. 11 представлена конструктивная схема блока ведущей шестерни.
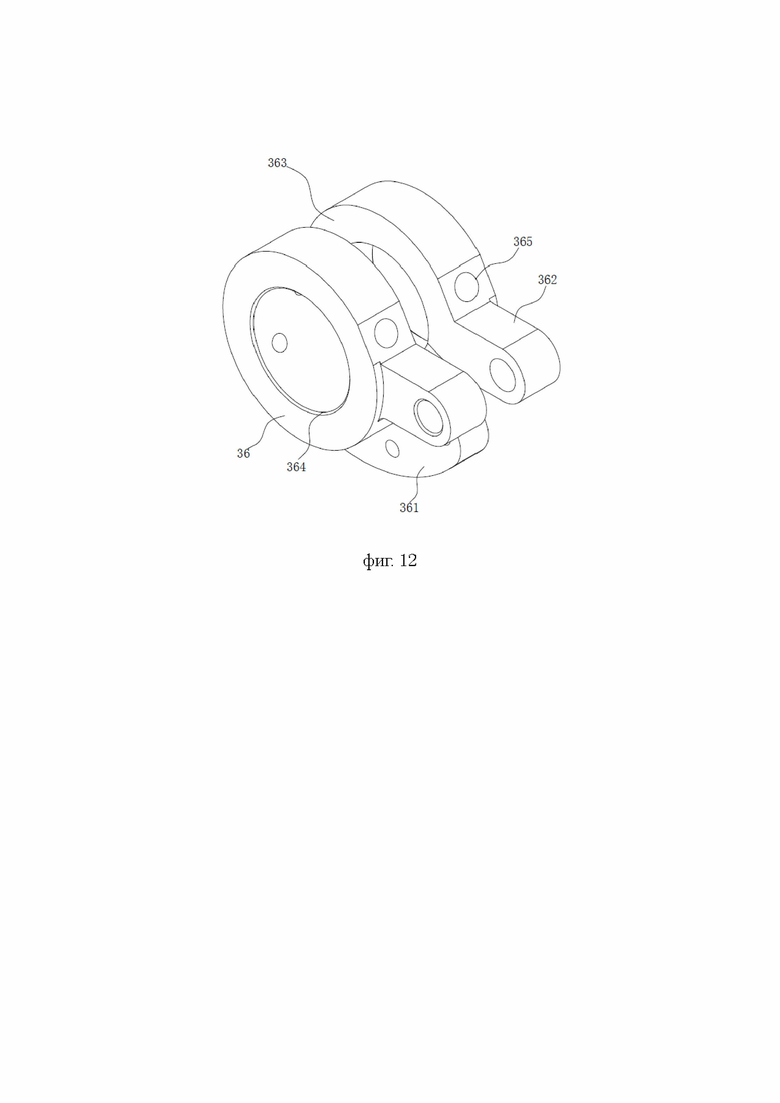
[0036] На фиг. 12 представлена конструктивная схема монтажной площадки.
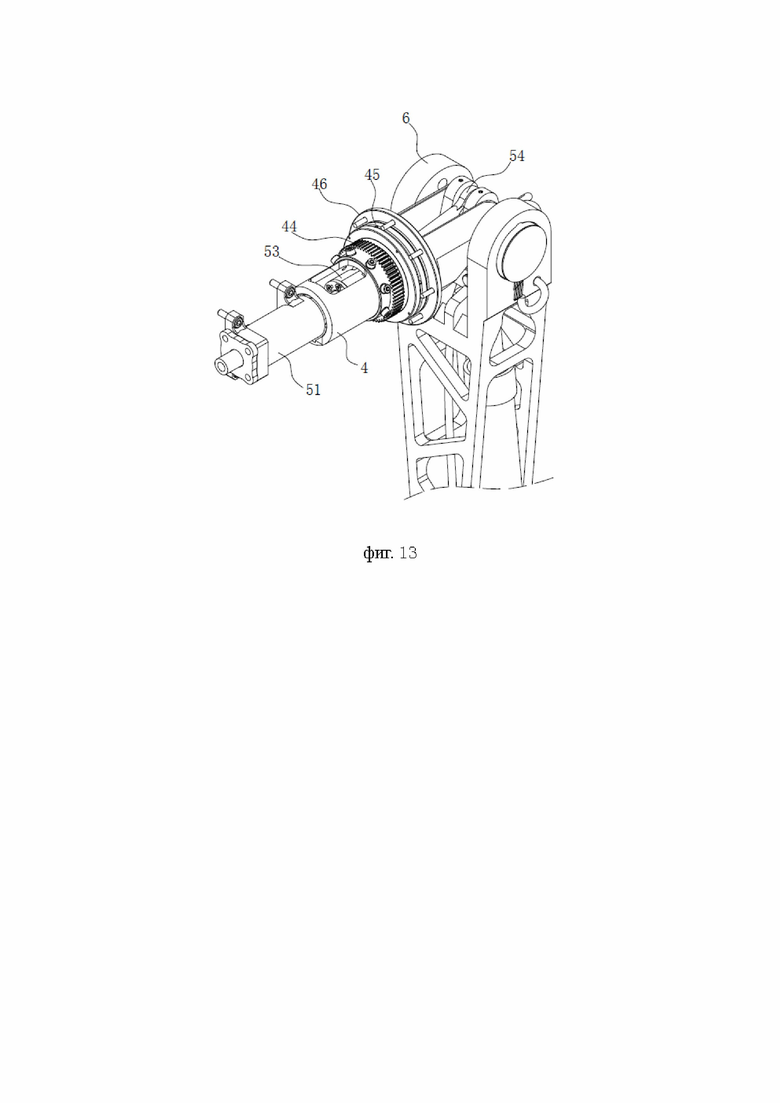
[0037] На фиг. 13 представлена конструктивная схема соединения механизма тазобедренного сустава и бедра.
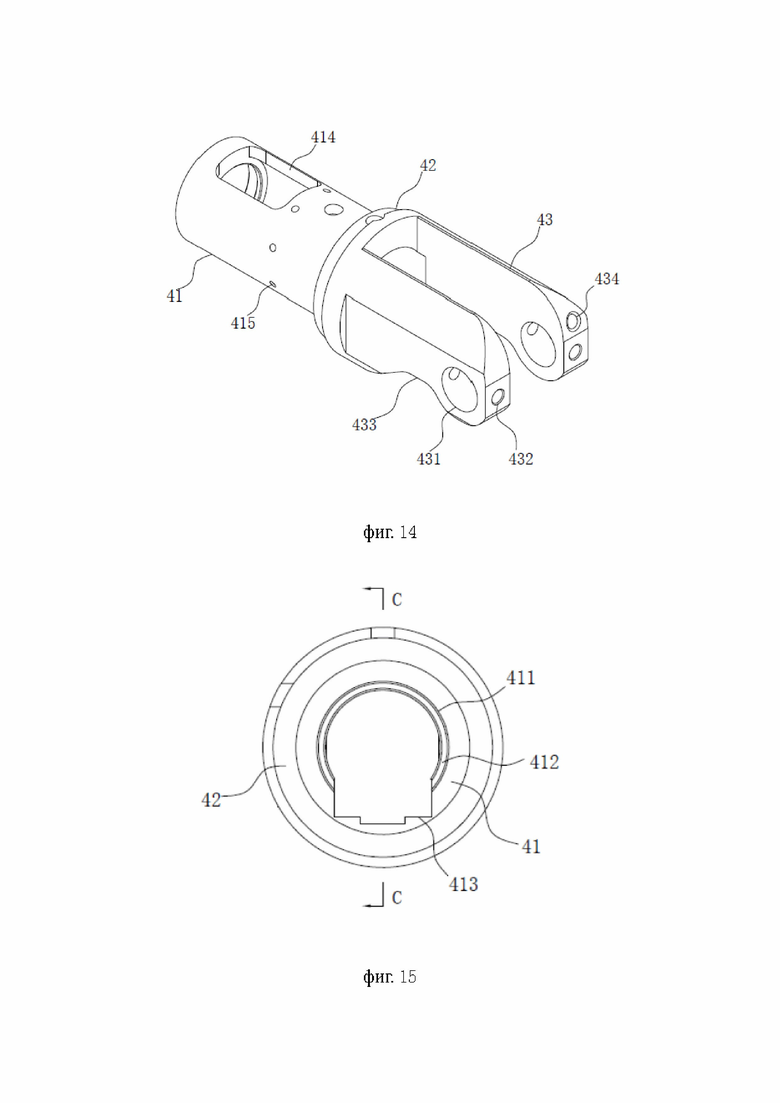
[0038] На фиг. 14 представлена конструктивная схема соединительных деталей.
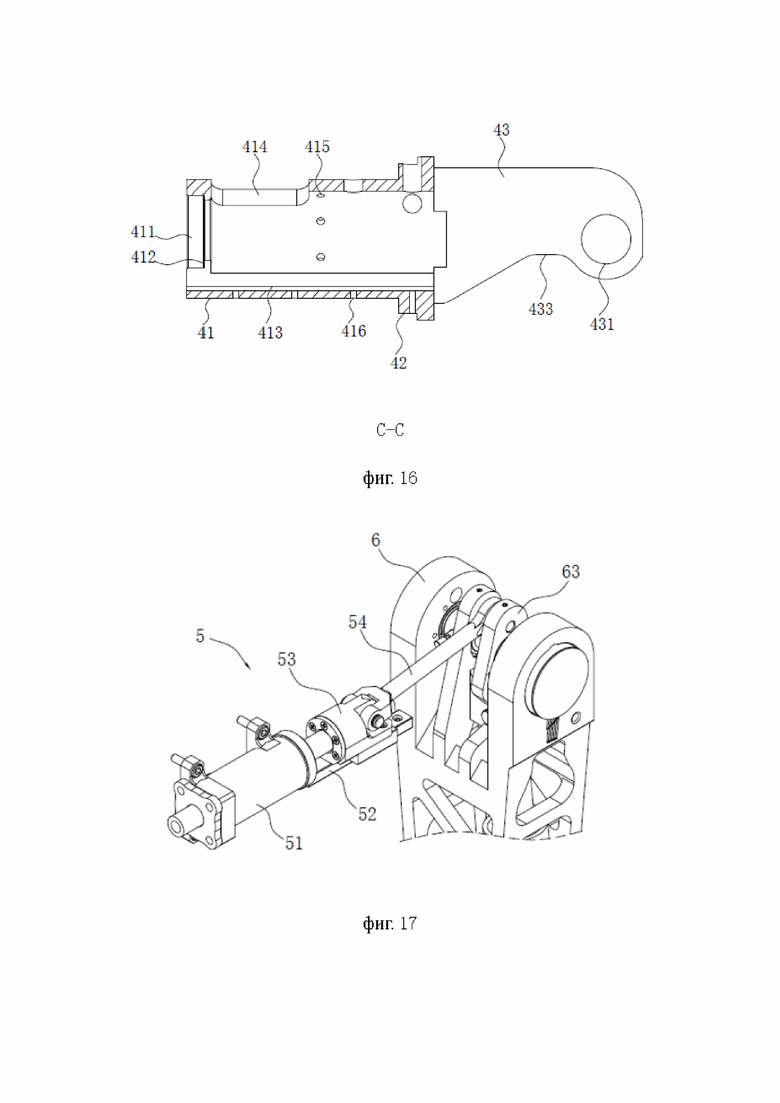
[0039] На фиг. 15 представлен вид слева с фиг. 14.
[0040] На фиг. 16 представлен вид разрезов в направлении С-С с фиг. 15.
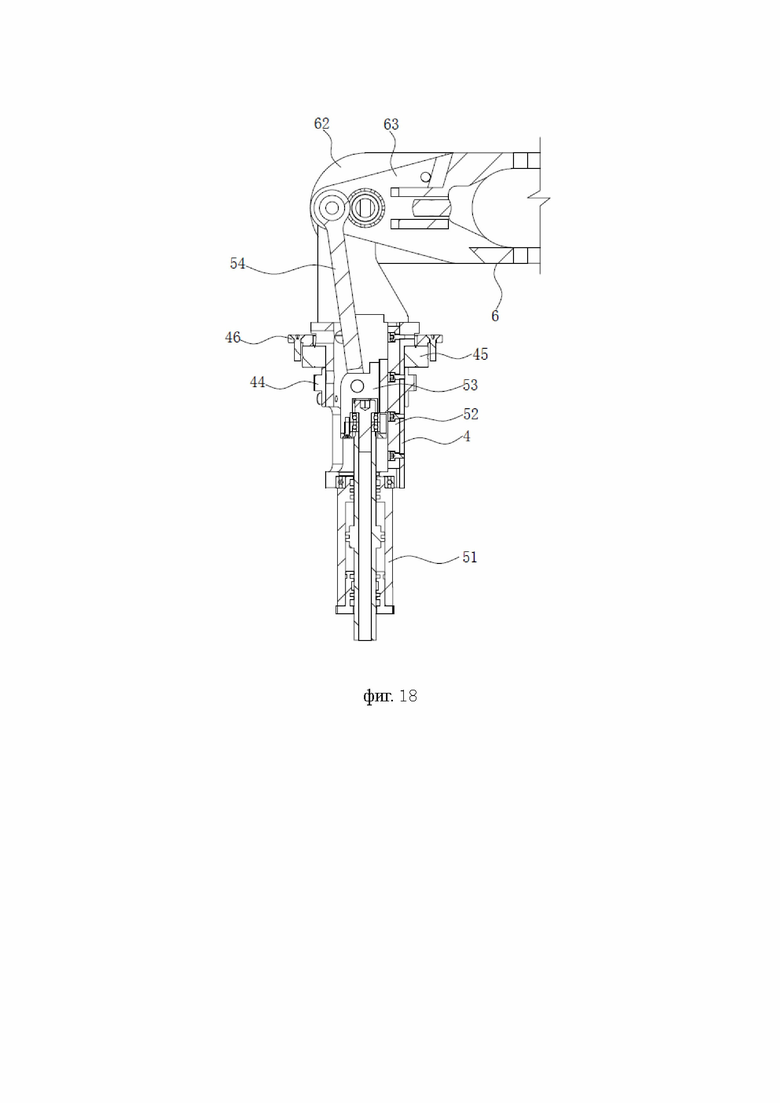
[0041] На фиг. 17 представлена конструктивная схема приводного узла бокового качания.
[0042] На фиг. 18 представлена конструктивная схема механизма тазобедренного сустава;
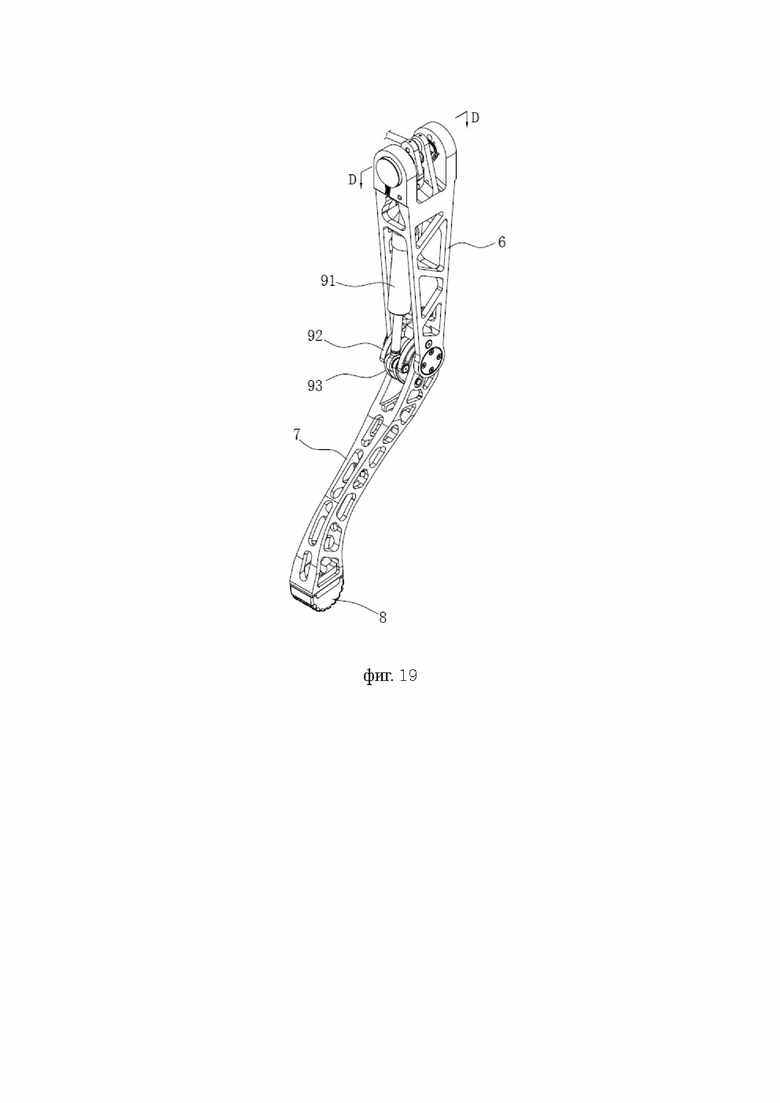
[0043] На фиг. 19 представлена конструктивная схема механизма ног.
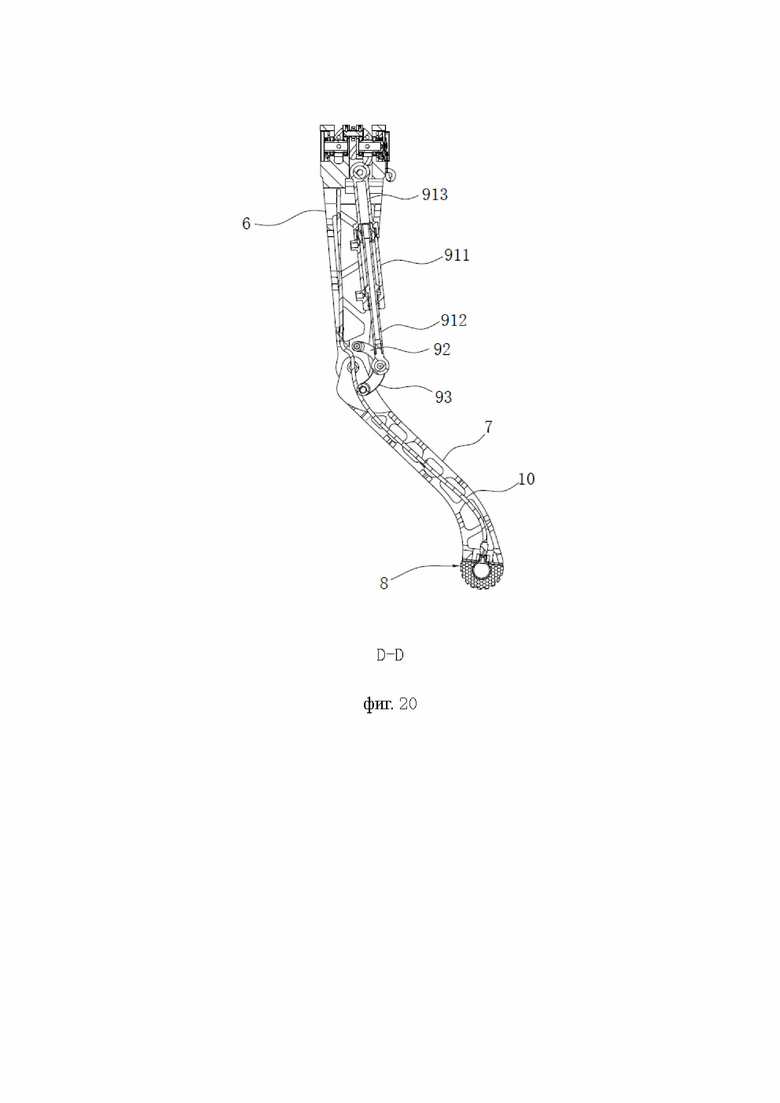
[0044] На фиг. 20 представлен вид разрезов в направлении D-D с фиг. 19.
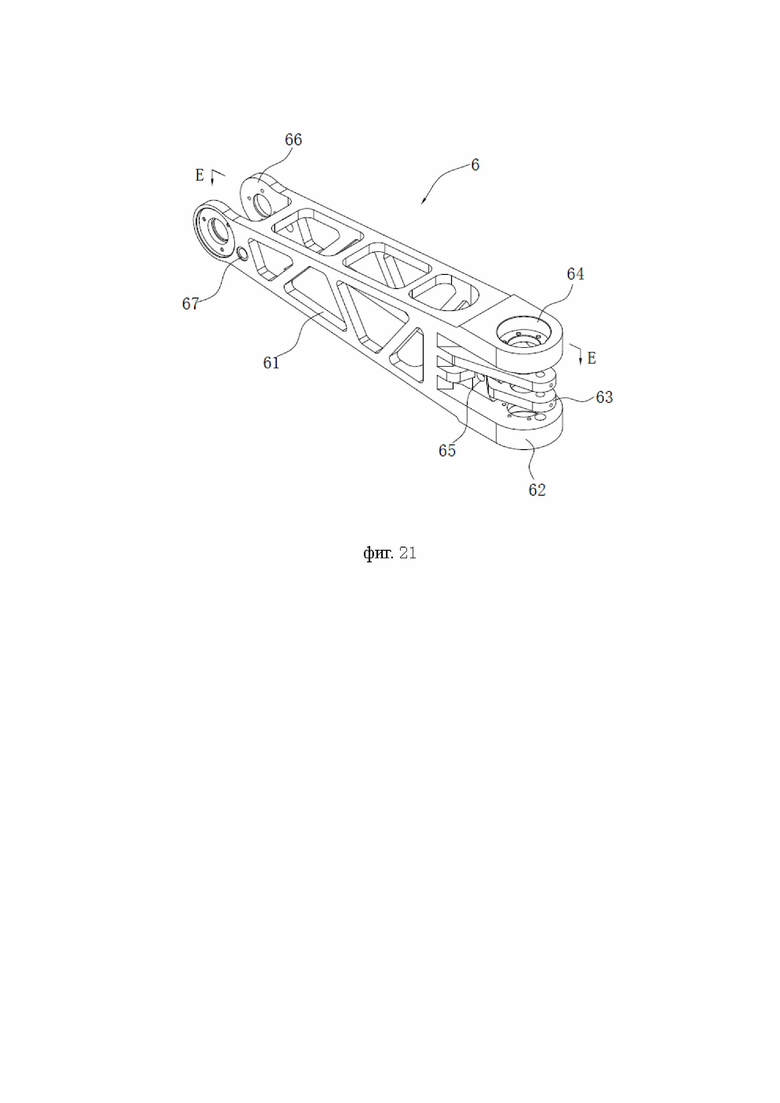
[0045] На фиг. 21 представлена конструктивная схема бедра.
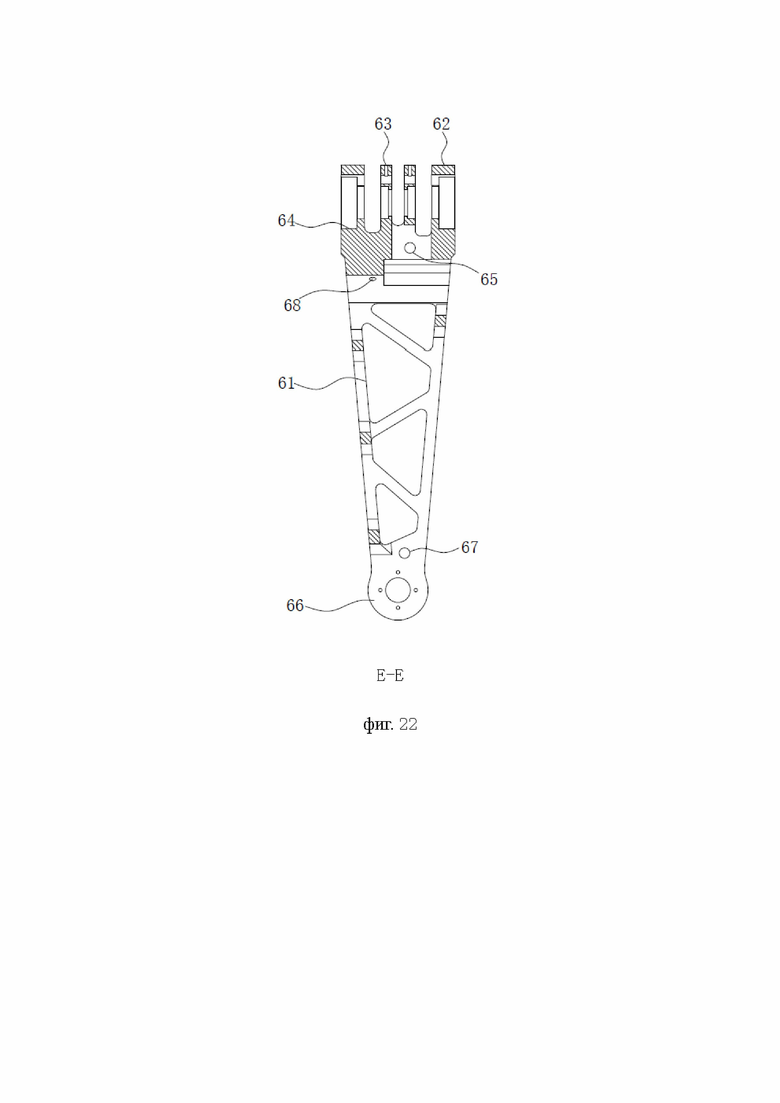
[0046] На фиг. 22 представлен вид разрезов в направлении E-E с фиг. 21.
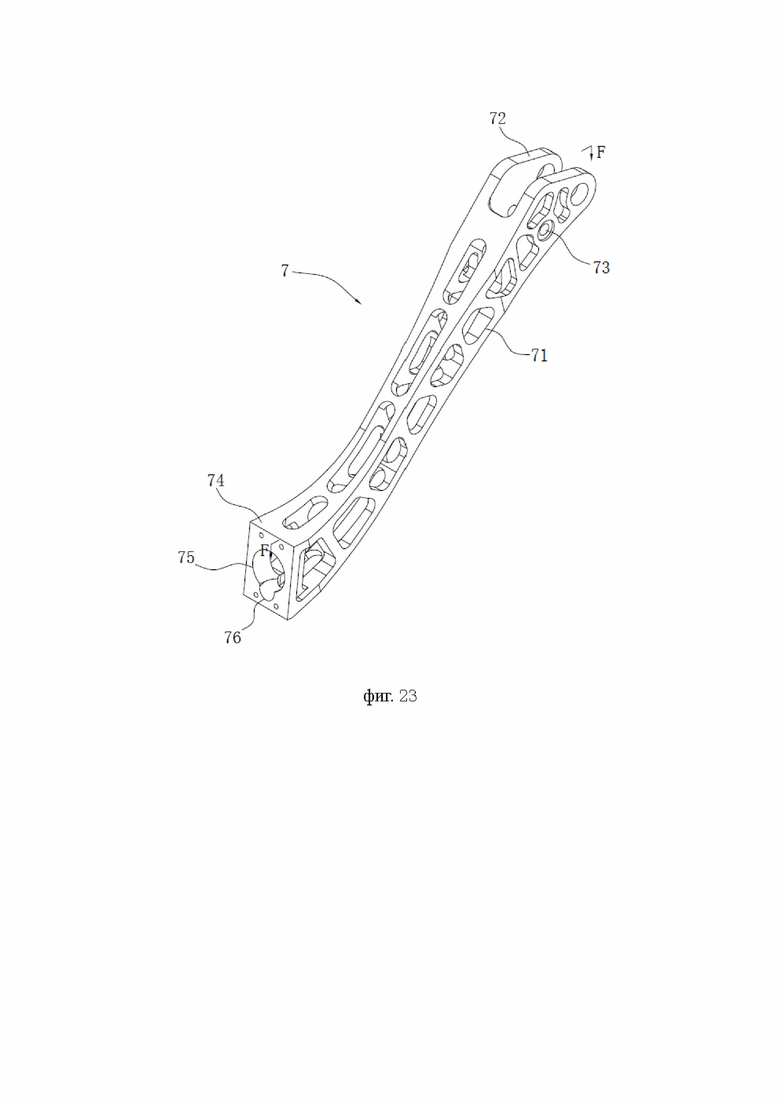
[0047] На фиг. 23 представлена конструктивная схема голени.
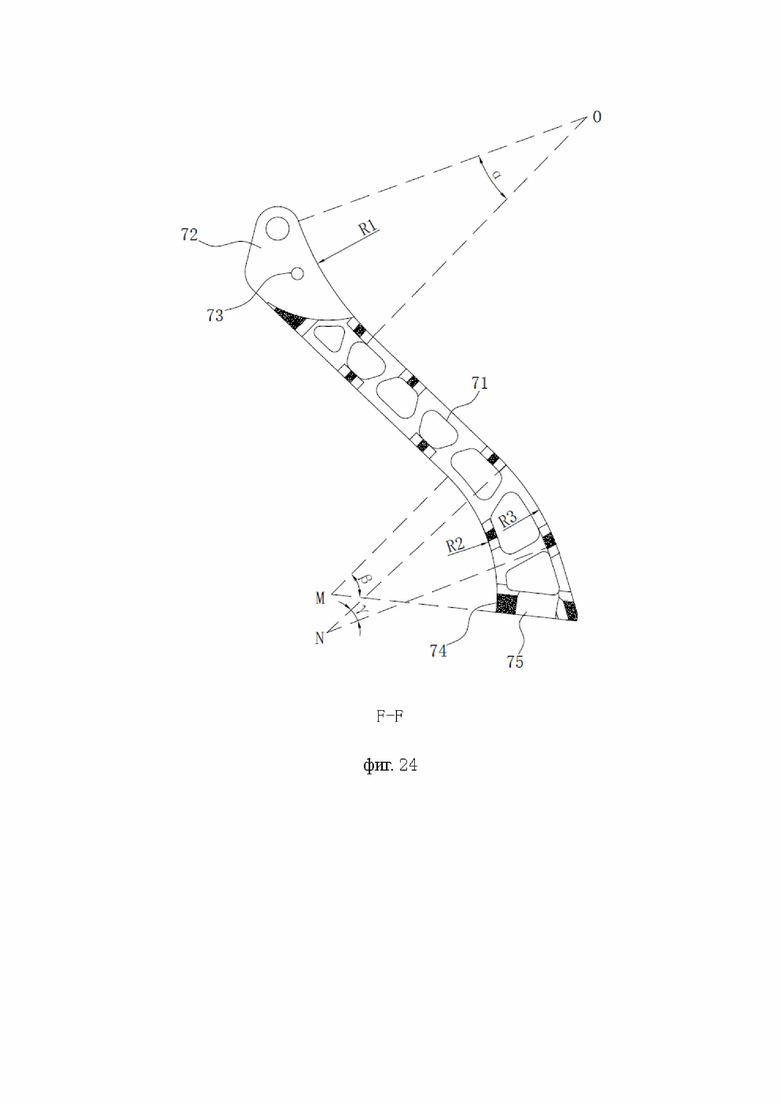
[0048] На фиг. 24 представлен вид разрезов в направлении F-F с фиг. 23.
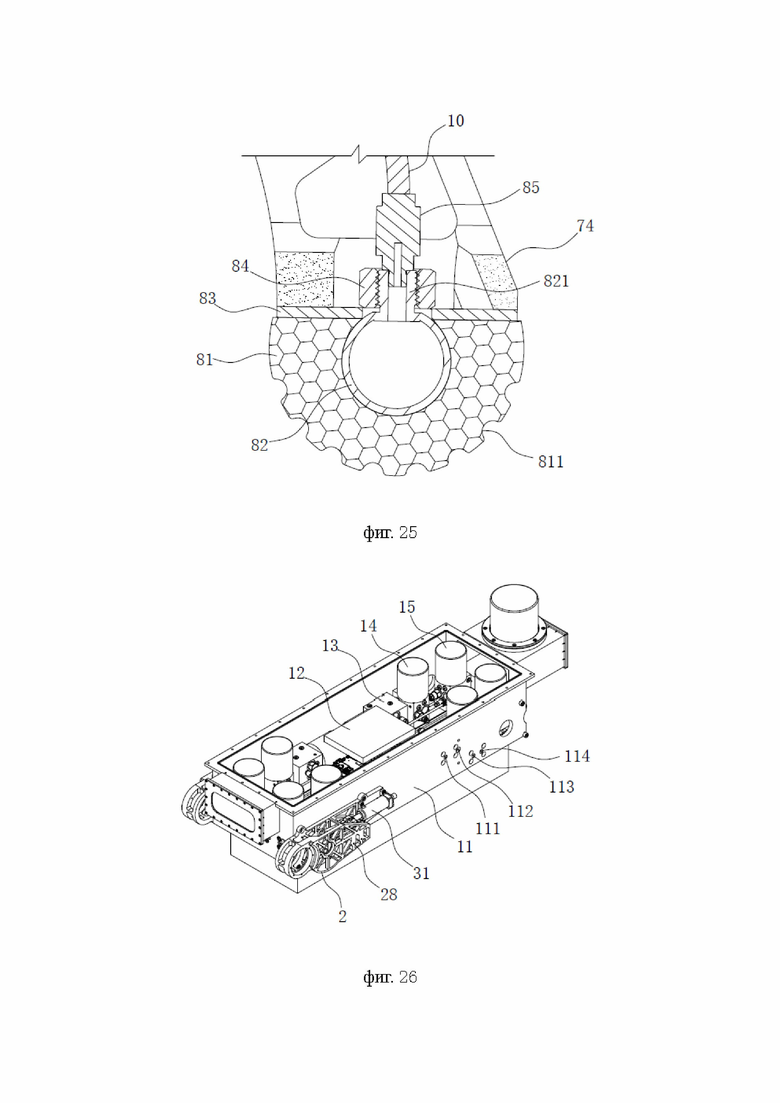
[0049] На фиг. 25 представлена частичная конструктивная схема сустава стопы.
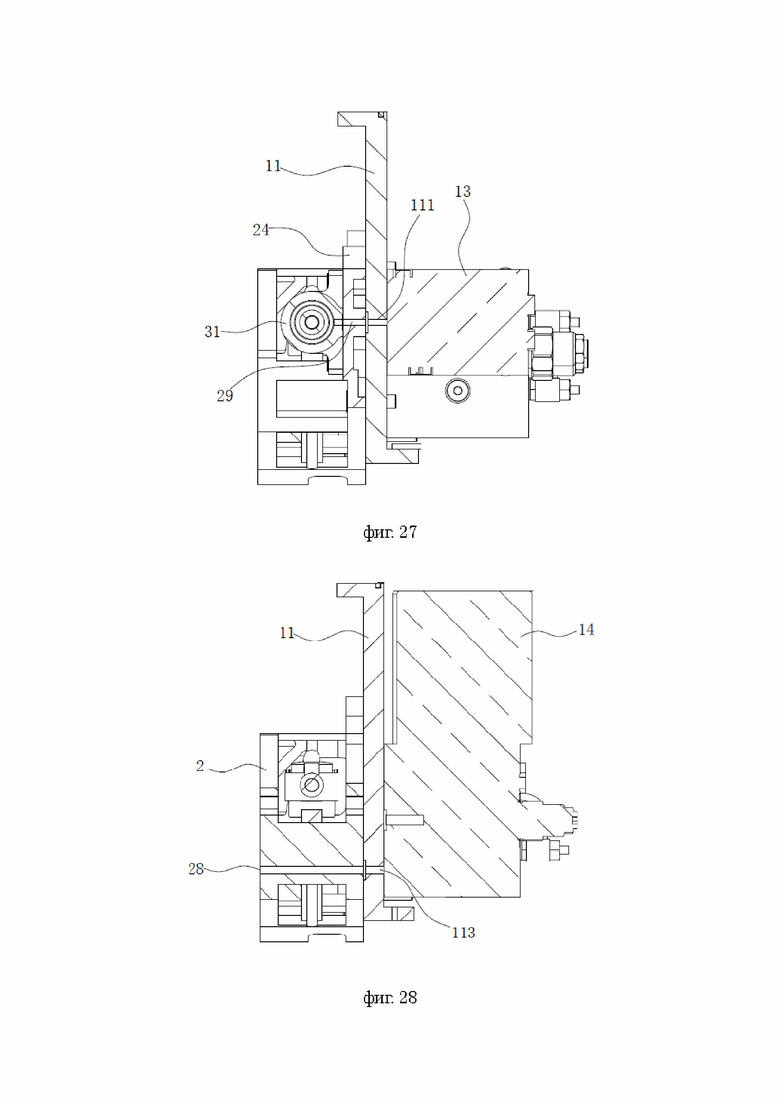
[0050] На фиг. 26 представлена конструктивная схема соединения корпуса и монтажной опоры.
[0051] На фиг. 27 представлен вид разрезов соединения первого масляного цилиндра, монтажной опоры с первым сервонасосом.
[0052] На фиг. 28 представлен вид разрезов соединения второго масляного канала, установленного на опоре с третьим сервонасосом.
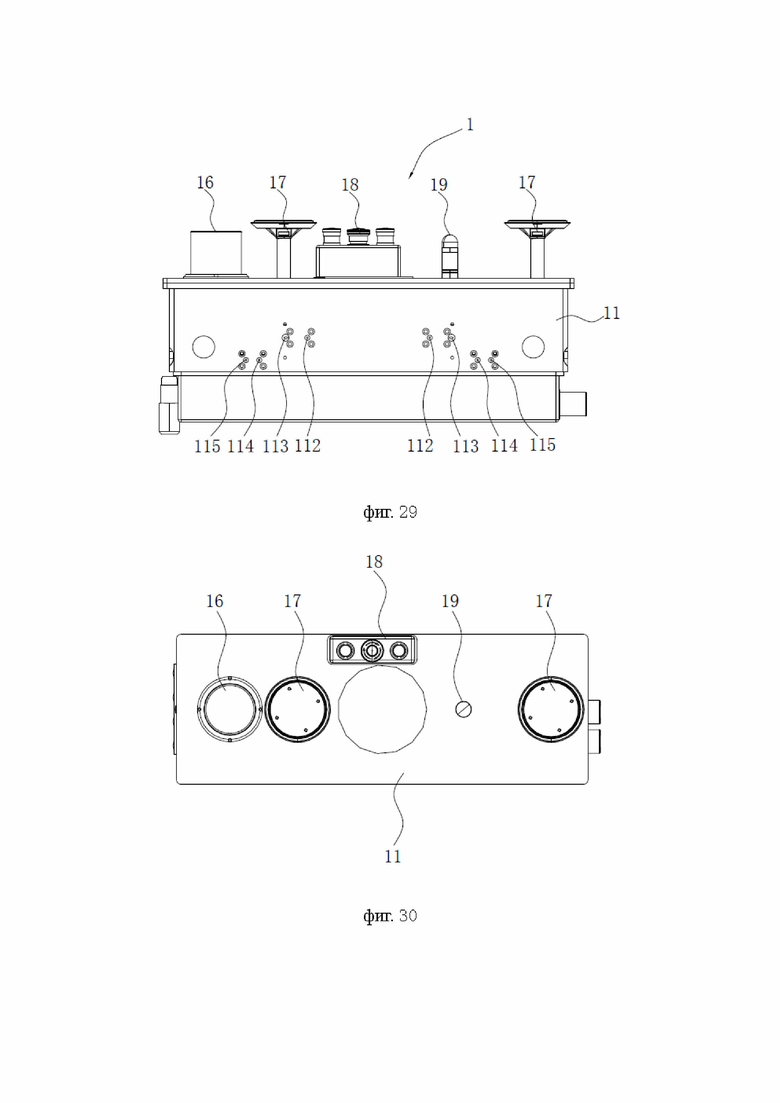
[0053] На фиг. 29 представлена конструктивная схема монтажа запчастей верхней крышки корпуса.
[0054] На фиг. 30 представлен вид сверху с фиг. 29.
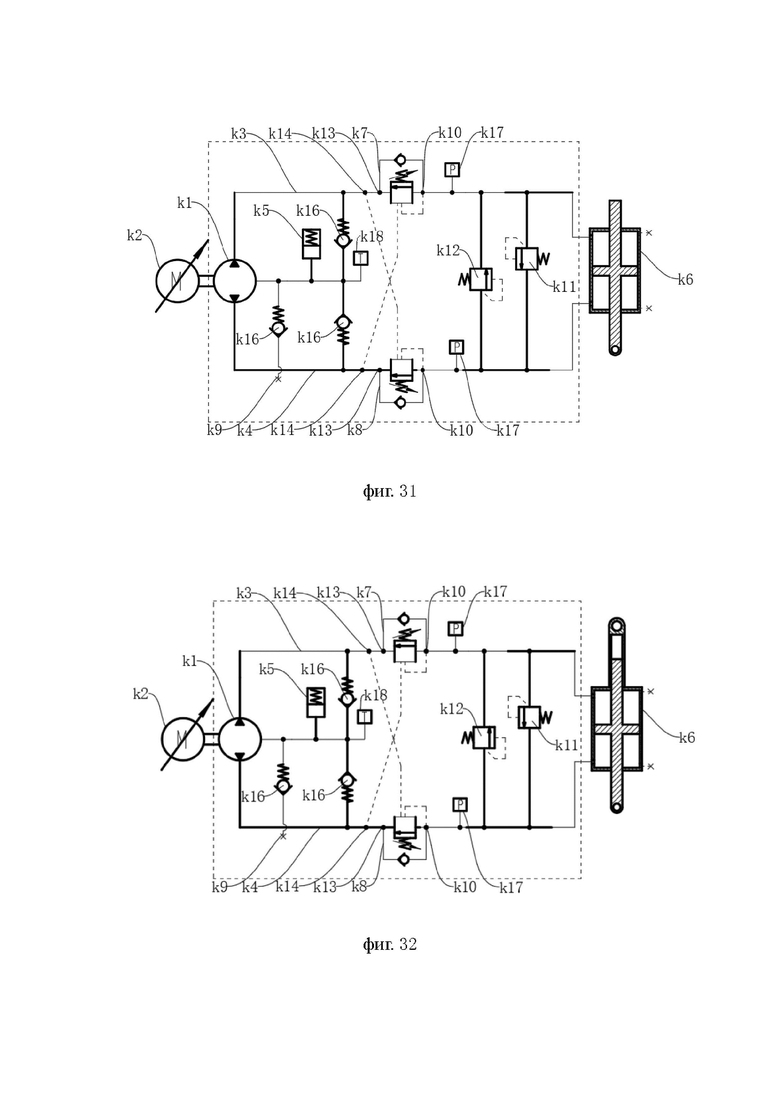
[0055] На фиг. 31 представлена схема бокового качания механизма тазобедренного сустава и гидравлической системы закрытого типа EHA по тангажу.
[0056] На фиг. 32 представлена схема гидравлической системы закрытого типа EHA по тангажу для коленного сустава.
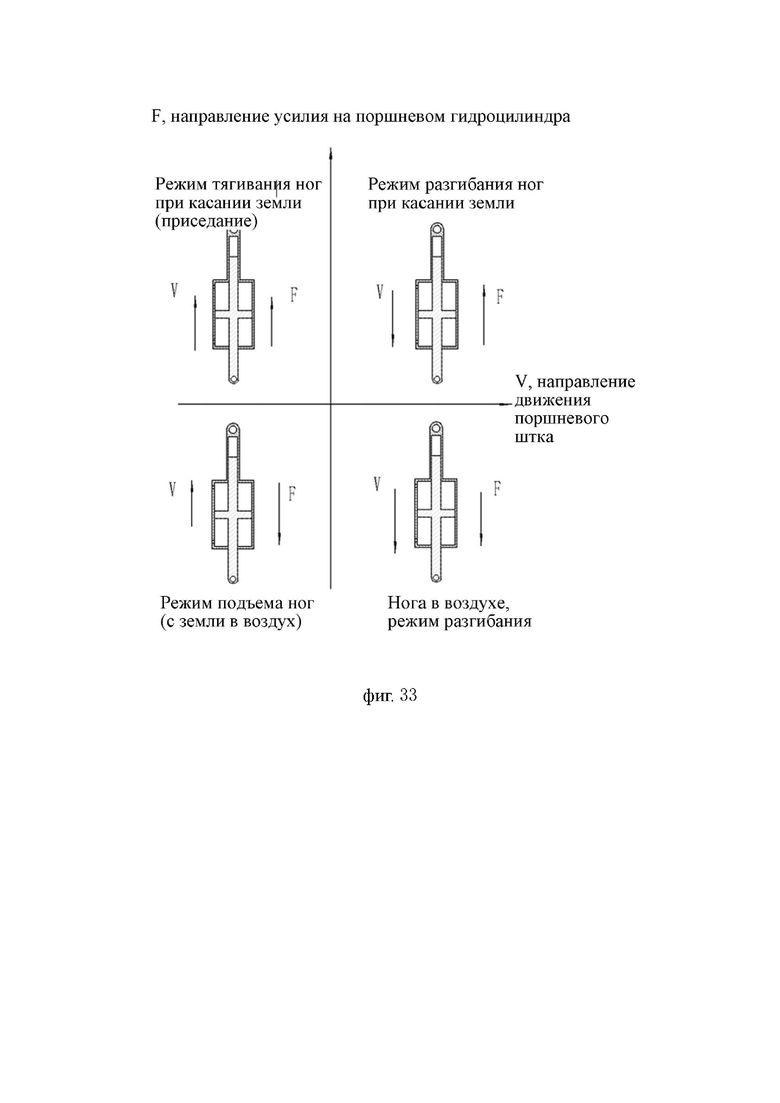
[0057] На фиг. 33 представлена схема координат FV в направлении нагрузки и движения поршневого штока гидроцилиндра.
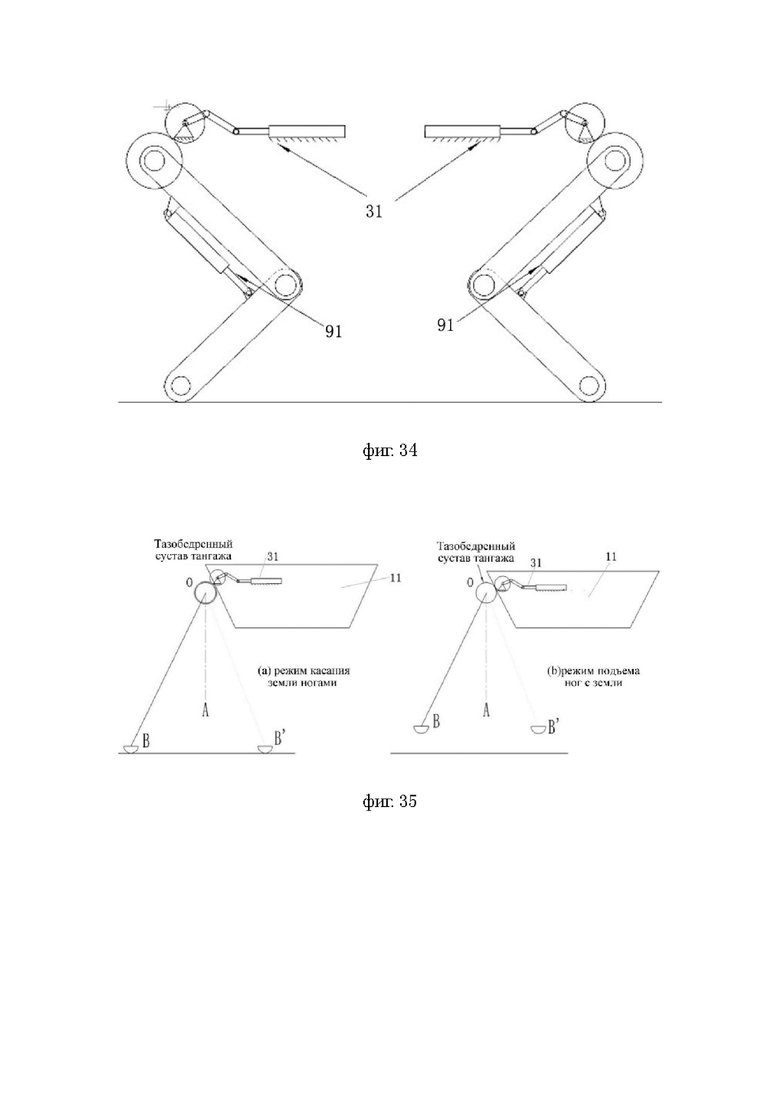
[0058] На фиг. 34 представлен режим нагрузки коленного сустава.
[0059] На фиг. 35 представлена схема нагрузочных режимов первого гидроцилиндра.
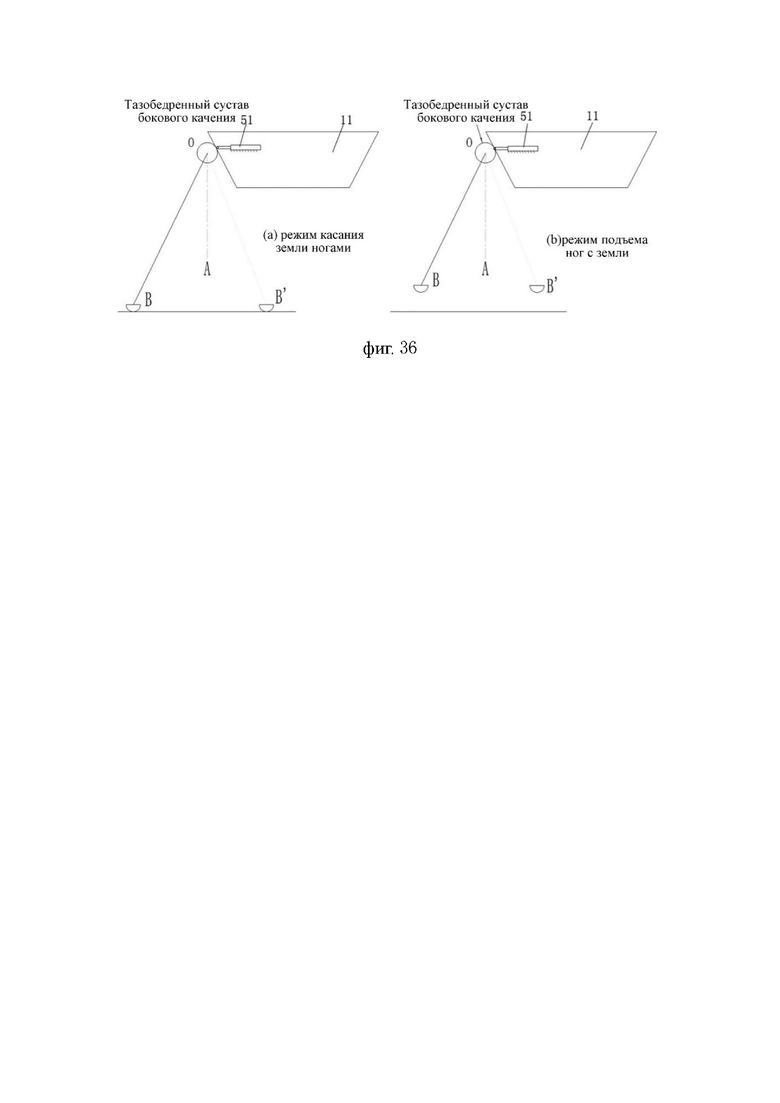
[0060] На фиг. 36 представлена схема нагрузочных режимов второго гидроцилиндра.
[0061] Пояснение ссылочных обозначений
[0062] 1 - узел управления; 11- корпус; 111 - первое отверстие для выхода масла; 112 - первое отверстие для входа масла; 113 - второе отверстие для выхода масла; 114 - второе отверстие для входа масла; 12 - блок управления; 13 - первый сервонасос; 14 -второй сервонасос; 15 - третий сервонасос; 16 - лазерный дальномер; 17 - RTK Антенна; 18 - взрывозащищенная кнопка; 19 - взрывобезопасный звуковой и световой сигнализатор;
[0063] 2 - монтажная опора; 21 - первая боковая пластина; 22 - вторая боковая пластина; 221 - крепежное отверстие; 23 - соединительное основание; 24 - неподвижная часть; 25 - первое отверстие вала; 26 -второе отверстие вала; 27 - монтажная канавка; 28 - второй масляный канал; 29 - первый масляный канал;
[0064] 3 - механизм переднего и заднего качания ног; 31 - первый гидроцилиндр; 311 - поршневой шток; 32 - первый рельс скольжения; 33 - блок скольжения; 34 - соединительный блок; 341 - разъем; 342 - первый выступ; 343 - скос; 35 - первый шатун; 36 - монтажная площадка; 361 - соединительная часть; 362 - второй выступ; 363 - прорезь; 364 - третье отверстие вала; 365 - крепежное отверстие; 37 - зубчатая пластина; 38 - поворотный вал;
[0065] 4 - соединительная деталь; 41 - монтажная труба; 411 - монтажное отверстие; 412 - фиксирующее кольцо; 413 - монтажная канавка; 414 - рабочее отверстие; 415 - перфорация; 416 - крепежное отверстие; 42 - соединительное кольцо; 43 - плечи; 431- четвертое отверстие вала; 432 - отверстие для штифта; 433 - отступные канавки; 434 - канал; 44 - ведомая шестерня; 45-подшипник; 46 - торцевая крышка;
[0066] 5 - механизм привода бокового качания; 51 - второй гидроцилиндр; 52 - второй рельс скольжения; 53 - блок скольжения; 54 - второй шатун;
[0067] 6 - бедро; 61 - первое отверстие для снижения веса; 62 - наружный выступ; 63 - внутренний выступ; 64 - монтажная канавка; 65 - отверстие для штифта; 66 - первый коленный выступ; 67 - сквозное отверстие; 68 - отверстие для кабеля;
[0068] 7 - голень; 71 - второе отверстие для снижения веса; 72 - второй коленный выступ; 73 - перфорация; 74 - соединительный конец стопы; 75 - монтажное отверстие; 76 - удлинительная канавка;
[0069] 8 - сустав стопы; 81 - чехол; 811 - противоскользящая канавка; 82 - внутренний мешок; 821 - резьбовой участок; 83 - крышка; 84 - крепежная гайка; 85 - датчик давления;
[0070] 9 - коленный сустав; 91-третий гидроцилиндр; 911 - корпус цилиндра; 912 - поршневой шток; 913 - монтажная опора; 92 - первая соединительная часть; 93 - вторая соединительная часть;
[0071] 10 - кабель; k1 - двухсторонний насос; k2 - электродвигатель; k3 - основной смазочный канал I; k4 - основной смазочный канал II; k5 - аккумулятор; k6 - симметричный исполнительный блок; k7 - односторонний балансировочный клапан I; k8 - односторонний балансировочный клапан II; k9 - маслонаполнительное отверстие; k10 - первый клапанный канал; k11 - переливной клапан I; k12 - переливной клапан II; k13 - второй клапанный канал; k14 - канал для регулирующего клапана; k15 - третий клапанный канал; k16 - односторонний клапан; k17 - датчик давления; k18 - датчик температуры.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0072] Изобретение подробнее описано на основе фиг. 1-36.
[0073] В варианте осуществления изобретения раскрыт взрывозащищенный шагающий робот с электрогидравлическим комбинированным приводом.
[0074] Согласно фиг. 1-3, взрывозащищенный шагающий робот с электрогидравлическим комбинированным приводом снабжен узлом 1 управления и многими ногами в сборе, каждая из них включена монтажную опору 2, механизм 3 переднего и заднего качания ног, механизм тазобедренного сустава, содержающий соединительную деталь 4 и механизм 5 привода бокового качания, механизм ног, включающий бедро 6 и голень 7; к мотажной опоре 2 вращательно подключена соединительная деталь 4, на которой расположен механизм 5 привода бокового качания, соединенный с бедром 6 и приводящий бедро 6 в движение внутреннего и наружного бокового качания; механизм 3 переднего и заднего качания ног проводит тазобедренный сустав в движение переднего и заднего качания, механизм качания ног 3 и тазобедренный сустав установлены на монтажной опоре 2 для осуществления соосной передачи, что упрощает сложность алгоритма системы управления.
[0075] Согласно фиг. 4-6, монтажная опора 2 содержит первую и вторую боковую пластину 21 и 22, расположенные параллельно, и соединительное основание 23, закрепленное между первой и второй боковой пластиной 21 и 22.
[0076] В середине и на одном конце второй и первой боковой пластины 22 и 21 должны быть соответственно выполнены первое отверстие вала 25 и второе отверстие вала 26, центральная соединенная линия которых расположена параллельно направлению в длине соединительного основания 23.
[0077] Для снижения общего веса монтажной опоры 2 на первой и второй боковой пластинах 21 и 22 выполнены отверстия для снижения веса, чтобы первая и вторая боковая пластина 21 и 22 имели ажурную конструкцию. Концевые части первой и второй боковой пластины 21 и 22, соответствующие второму отверстию вала 26, выполнены в виде круглой дуги.
[0078] Один из концов второй боковой пластины 22, находящийся далеко от второго отверстия вала 26, имеет удлиненный участок для образования крепежной части 24, один из боков первой боковой пластины 21, находящийся далеко от соединительного основания 23, снабжен крепежными отверстиями 221. Один из концов первой боковой пластины 21, находящийся далеко от второго отверстия вала 26, выполнен в виде трапеции. На районе между соединительным основанием 23 и вторым отверстием вала 26 установлена монтажная канавка 27. Монтажная опора 2 снабжена отверстиями для гвоздей вокруг первого и второго отверстия вала 25 и 26, и при этом снабжена соединенной арматурой вокруг второго отверстия вала 26. На соединительном основании 23 имеются отверстия для гвоздей.
[0079] Согласно фиг. 7-9, механизм переднего и заднего качания ног 3 включает блок ведущей шестерни и узел переднего и заднего качания, приводящий в приводе блок ведущей шестерни.
[0080] Узел переднего и заднего качания содержит первый гидроцилиндр 31, первый рельс скольжения 32, блок скольжения и первый шатун 35. На соединительном основании 23 монтажной опоры 2 может быть закреплен винтами рельс скольжения 32, направление по длине которого перпендикулярно оси первого отверстия вала 25; корпус первого гидроцилиндра 31 закреплен винтами на крепежной части 24 монтажной опоры 2, поршневой шток 311 первого гидроцилиндра 31 подключен к блоку скольжения, скользящий по первому рельсу скольжения 32, чтобы первый гидроцилиндр 31 был способен приводить блок скольжения в перемещение вперед и назад по первому рельсу скольжения 32. Первый гидроцилиндр 31 может быть двухходовым гидравлическим цилиндром.
[0081] Согласно фиг. 10, блок скольжения включает блок скольжения для укрепления соединений 33 и соединительный блок 34. Способ крепления между блоком скольжения 33 и соединительным блоком 34 может быть креплением винтами, зажимом, встраиванием, сваркой или интегральным формованием и т. д. На блоке скольжения 33 выполнена канавка, соответствующая первому рельсу скольжения 32, по направлению по длине которого может скользить блок скольжения 33. Для удобства демонтажа и замены соединительный блок 34 в данном случае закреплен к блоку скольжения 33 с помощью винта.
[0082] На одном конце соединительного блока 34 предусмотрен разъем 341, конец поршневого штока 311 первого гидроцилиндра 31 вставлен в разъем 341 и закреплен; на другом конце соединительного блока 34 закреплен первый выступ 342, с которым один конец первого шарнира 35 шарнирно соединяется штифтом, ось которого перпендикулярна первому рельсу скольжения 32 и параллельна с плоскостью соединительного блока 34, удаленной от первого рельса скольжения 32, так что первый шатун 35 может вращаться на плоскости, проходящей через первый рельс скольжения 32.
[0083] В толщине первого выступа 342 меньше разъема 341, предоставленного соединительным блоком 34, скос 343 предназначен для уменьшения воздействия соединительного блока 34 на вращение первого шатуна 35 и расположен между разъемом 341 и первым выступом 342, относящимся к соединительному блоку 34.
[0084] Согласно фиг. 11-12, блок ведущей шестерни содержит зубчатую пластину 37 и монтажную площадку 36, включающую втулку третьего отверстия вала 364, на периферийной наружной стенке втулки установлена соединительная часть 361 для закрепления зубчатой пластины 37, закрепленные съемно, при этом центральная ось наружных кромок зубьев на пластине 37 совпадает с центром втулки.
[0085] При взаимодействии вращения третьего отверстия вала 364 и поворотного вала 38 монтажная площадка 36, вращающаяся вокруг поворотного вала 38, соединена с первым отверстием вала 25, установленным на монтажной опоре 2, поворотный вал 38 и монтажная опора 2 могут быть соединены подшипником, зубчатая пластина 37, закрепленная к монтажной площадке 36, расположена в монтажной канавке 27 и выполнена во вращении с помощью шестерни. При износе или повреждении зубчатой пластины 37 и необходимости замены зубчатая пластина 37 снимается с соединительной части 361 и устанавливается новая зубчатая пластина 37, чтобы узел ведущей шестерни мог продолжать работать и продлить общий срок службы. Зубчатая пластина 37 и монтажное седло 36 также могут быть соединены другими съемными способами, например, зажимом, вставкой, вскрытием шипа, встраиванием и т.д.
[0086] На соединительной части 361 предусмотрено по меньшей мере одно соединительное отверстие, зубчатая пластина 37 подключена к соединительной части 361 винтами, проходящими через соединительное отверстие, где имеются 4 соединительных отверстия, 4 соединительных отверстия могут быть равномерно распределены. В других вариантах осуществления количество соединительных отверстий может быть 1, 2, 3, 5 и более, что подбирается в соответствии с реальными потребностями.
[0087] При условии необходимости только частичного кругового движения блока ведущей шестерни, не нужно полное круговое движение, зубчатая пластина 37 может быть изогнутой. Соответственно, соединительная часть 361 также может быть изогнутой.
[0088] На наружной стенке втулки закреплен второй выступ 362, предназначенный для шарнирного соединения с первым шатуном 35, и первый гидроцилиндр 31 приводит в движение скользящее основание и прикладывает крутящий момент к блоку ведущей шестерни.
[0089] В случае, когда первый шатун 35 находится в середине монтажной площадки 36, во избежание воздействия вращения из-за вмешательства первого шатуна 35 и монтажой площадки 36, в середине втулки вдоль дуговой на поверхности окружности предусматривается отверстие, соответствующее наружной стенке втулки, устанавливается второй выступ 362, который также может быть расположен на стороне отверстия, таким образом, монтажная площадка 36 вращается на больший угол. В других вариантах осуществления второй выступ 362 также может быть расположен в среднем положении соответствующего отверстия втулки.
[0090] Для минимизации смещения центра тяжести всего блока ведущей шестерни после установки зубчатой пластины 37, предусмотрены два вторых выступа 362, распределенные по двум сторонам отверстия. Соединительная часть 361 расположена на изогнутой поверхности, противоположной отверстию. Одна торцевая поверхность соединительной части 361 расположена близко к среднему участку отверстия, и другая поверхность расположена далеко от отверстия.
[0091] Для удобства монтажа и демонтажа поворотного вала 38 и монтажной площадки 36, которая снабжена фиксирующими отверстиями 315, проходящими через боковую стенку по радиальному направлению, при этом после установки на поворотный вал 38 монтажной площадки 36, затягивающей винтами через фиксирующие отверстия 315.
[0092] Для улучшения плотного контакта между гайкой и внешней стенкой монтажной площадки 36 и уменьшения возможности разрушения винта, область вокруг фиксирующего отверстия 315, находящаяся на внешней стенке втулки монтажной площадки 36, является плоской.
[0093] В других вариантах осуществления настоящего изобретения второй выступ 362 также может быть только одним, расположенным на одной стороне монтажной площадки 36, при этом монтажная площадка 36 выполнена без отверстия. При монтаже с бока монтажной площадки 36 первый шатун 35 шарнирно соединен с вторым выступом 362.
[0094] В других вариантах осуществления настоящего изобретения соединительная часть 361 также может быть двумя или больше, многоштучные соединительные части 361 распределены по периметру монтажной площадки 36, а пластины 37, соединенные с многоштучными соединительными частями 361, могут образовывать неполные шестерни. Альтернативно, по крайней мере, вдоль направления оси втулки, расположены две соединительные части 361, таким образом, вращение монтажной площадки 36 приводит в движение несколько параллельных соединительных частей 361, и блок ведущей шестерни может быть выполнен в виде двойной зубчатой передачи.
[0095] В зависимости от необходимости зубчатая пластина 37 может быть изогнутой или секторной или круглой. Модуль зуба на зубчатой пластине 37 может быть отрегулирован и соответствен различным потребностям передаточного числа.
[0096] Когда первый гидроцилиндр 31 приводит блок скольжения к перемещению по первому рельсу скольжения 32, поскольку первый шатун 35 эксцентрически соединен с блоком ведущей шестерни, блок скольжения связан с первым шатуном 35, приводящим блок ведущей шестерни во вращение, за счет совершения возвратно-поступательного движения блока скольжения линейно вдоль первого рельса скольжения 32 превращено в возвратно-поступательное качание блока ведущей шестерни вокруг оси, дополнительно обеспечивается переднее и заднее качания ног на основе вращения тазобедренного сустава при зацеплении привода и блока ведущей шестерни. В результате того, что первый гидроцилиндр 31 приводит блок скольжения в движение линейно, не подпадая под влияние на крутящий момент от традиционного двигателя, и управляем легко.
[0097] Согласно фиг. 13 механизм тазобедренного сустава включает соединительную деталь 4 и механизм привода бокового качания 5, который предназначен для вызова внутреннего и наружного качания бедра.
[0098] Согласно фиг. 14-16, соединительная деталь 4 содержит монтажную трубу 41 и соединительное кольцо 42 с коаксиальным фиксированным соединением, на одном конце которого, удаденном от монтажной трубы 41, закреплена пара плеч 43, предназначенных для вращательного соединения с бедром 6.
[0099] Согласно фиг. 17, механизм привода бокового качания 5 включает второй гидроцилиндр 51, соединяющийся коаксиально с одним концом монтажной трубы 41, удаденном от соединительного кольца 42, второй рельс скольжения 52, фиксирующий по направлению оси на внутренней стенке вдоль монтажной трубы 41, блок скольжения 53, соединеный с вторым рельсом скольжения 52 и относительно его выполнено скольжение, второй шатун 54, один конец которого шарнирно соединен с блоком, а другой конец шарнирно подсоединен к бедру 6.
[0100] Плечи 43 вращательно соединяются с бедром 6 для создания первичной опоры, соединительная деталь 4 вращательно подключена к второму отверстию вала 26 монтажной опоры 2 с помощью подшипника 45, растягивание и втягивание поршневого штока второго гидроцилиндра 51 могут приводить в движение скользящий блок скольжения 53, расположенный в монтажной трубе 41 по второму рельсу скольжения 52 и приводящий бедро 6 в качание вокруг приводной оси за счет второго шатуна 54. Таким образом, ось второго гидроцилиндра 51 тазобедренного сустава может оставаться относительно неизменной при движении робота, что упрощает ориентиры положения и облегчает оптимизацию алгоритмической программы управления роботом.
[0101] На одном конце плеча 43, удаленном от монтажной трубы 41 установлено четвертое отверстие вала 431, ось которого опирается на ось монтажной трубы 41, внутренний выступ 63 расположен на торцевой части бедра 6, соединяющегось вращательно с плечей 43 за счет вращающего вала, проходящего через четвертое отверстие вала 431, второй шатун 54 и внутренний выступ 63 соединены вращением штифта.
[0102] Согласно фиг. 14-16, боковая стенка монтажной трубы 41 сформирована перфорацией 415 вдоль радиального направления, внешняя ведомая шестерня монтажной трубы 41 снабжена ведомой шестерней 44, которая закреплена винтами, проходящими через перфорацию 415 для предотвращения скольжения по круговому направлению. Ведомая шестерня 44 входит в зацепление с внешним краем зубчатой пластины 37, таким образом, когда механизм тазобедренного сустава соединен с приводным механизмом переднего и заднего качания через узел ведомой шестерни, механизм тазобедренного сустава может вращаться вокруг осевой линии монтажной трубы 41 полностью и синхронно. Благодаря передаче через шестерни можно способствовать улучшению устойчивости механизма переднего и заднего качания ноги. Перфорация 415 может быть многоштучной, равномерно распределенной вдоль окружности монтажной трубы 41, что обеспечивает равномерную нагрузку и надежное крепление точки соединения между ведомой шестерней 44 и монтажной трубой 41.
[0103] Согласно фиг. 14-16, внутренняя стенка монтажной трубы 41 снабжена монтажной канавкой 413 по осевому направлению, где установлено крепежное отверстие 416, проходящие через которое винты предназначены для прикрепления второго рельса скольжения 52 к монтажной трубе 41. Поперечное сечение монтажной канавки 413 может выполнено в виде ступеньки или других, как прямоугольника-трапеции-полукруга-круга и т.д.
[0104] В других вариантах осуществления изобретения второй рельс скольжения 52 также может быть встроен в монтажную трубу 41 или выполнен цельно.
[0105] Внутри монтажной трубы 41 заполнено монтажное отверстие 411, на внутренней стенке одного конца монтажной трубы 41, удаденного от соединительного кольца 42 закреплено фиксирующее кольцо 412, к которому прикреплен конец блока второго гидроцилиндра 51, соединенный с монтажной трубой 41 с помощью подшипника.
[0106] Для облегчения работы или наблюдения монтажная трубка 41 дополнительно снабжена рабочим отверстием 414, которое сформировано рядом с фиксирующим кольцом 412, которое с перфорацией 415 находятся на двух концах рабочего отверстия 414 вдоль осевого направления монтажной трубы 41.
[0107] Внешняя стенка соединительного кольца 42 может быть выполнена в виде ступеньки, подшипник 45 может быть вложен в соединительное кольцо 42, таким образом, тазобедренный сустав ноги робота может вращательно поддерживаться на монтажном кронштейне 2. Для защиты подшипника 45, соединительное кольцо 42 дополнительно оборудовано торцевой крышкой 46, которая может быть закреплена винтами на втором отверстии вала 26 монтажной опоры 2. Соединительное кольцо 42 имеет больший внешний диаметр контура, чем монтажная трубка 41, соединительное кольцо 42 повышает прочность конструкции на соединении плечи 43 и монтажной трубы 41.
[0108] Согласно фиг. 14-16, высота четвертого отверстия вала 431 на плече 43 установлена в соответствии с монтажным отверстием 411. По радиальному направлению на плече 43 вдоль четвертого отверстия 431 предусмотрено отверстие для штифта 432, через которое поворотный вал может быть закреплен винтом, обеспечивая неподвижность относительно плеча 43, только бедро 6 вращается.
[0109] Для уменьшения неисправностей при движении ног робота, вызванных навивкой кабелей, на плече 43 предусмотрен канал 434, предназначенный для прохода кабелей и расположенный по направлению оси монтажной трубы 41. Канал 434 может быть распределен на одном плече 43 или на двух рычагах 43. Каждый рычаг 43 может иметь один канал 434 или два или три, количество канала зависит от конкретного требования.
[0110] Согласно фиг. 16-18, при качании бедра 6 вокруг поворотного вала, чтобы предотвратить столкновение верхнего конца бедра 6 с плечом 43, отступные канавки 433 сформированы на краю одной стороны, близкой к соединительному кольцу 42, находящемуся в четвертом отверстии вала 431 плеча 43.
[0111] Процесс выполнения бокового качания и переднего и заднего качания ног в сборе следующий: первый гидроцилиндр 31 приводит блок скольжения 33 в возвратно-поступательное движение линейно вдоль первого рельса скольжения, при этом первый шатун 35, соединенный с соединительным блоком 34, эксцентрично тянет монтажную площадку 36, таким образом, зубчатая пластина 37 качается, ведомая шестерня 44, зацепленная с зубчатой пластиной 37, вращается соответственно.
[0112] В связи с коаксиальным соединением соединительной детали 4 с ведомой шестерней 44, соединительная деталь 4 вращается возвратно-поступательно, а бедро 6, соединяемое поворотным соединением с соединительной деталью 4, качается вперед и назад. Механизм тазобедренного сустава поворачивается с помощью зубчатой передачи под действием механизма переднего и заднего качания привода 2, что обеспечивает точное управление бедром 6 при его качении вокруг монтажной трубы 41.
[0113] Второй гидроцилиндр 51 приводит блок скольжения 53 в возвратно-поступательное скольжение по второму рельсу скольжения 52, второй шатун 54, соединенный с блоком скольжения 53, тянет внутренний выступ 63 на бедре 6 для возвратно-поступательного колебания, что обеспечивается внутреннее и внешнее колебание бедра 6.
[0114] Оси механизма привода бокового качания 5 второго гидроцилиндра 51 и механизма переднего и заднего качания ног 3 первого гидроцилиндра 31 остаются неизменными во всем процессе движения ног, что способствует оптимизации алгоритмической программы управления роботом.
[0115] Упрощенная теория алгоритма управления описана следующим образом на примере привода двух соседних суставов, трехмерная прямоугольная система координат 1 (x1, y1, z1) вращается углом θ1 вокруг оси z1, трехмерная прямоугольная система координат 2 (x2, y2, z2) вращается углом θ2 вокруг оси x2, как правило, при трансформации двух суставов координата 1 выполнена в виде справочного координата, пространственная координата 2 относительно системы координат 1 представлена следующим образом: . При пересечении осей двух суставов в одной точке, то есть при совпадении начальной точки двухсуставной системы координат, x2, y2, z2, представляющие расстояние между начальной точкой и двухсуставной системой координат равны 0, что позволяет упростить представление матрицы в программном обеспечении управления приводом, упрощенные пространственные координаты представлены следующим образом:
.
[0116] Согласно фиг. 19-20, механизм ног включает бедро 6, голень 7 и коленный сустав 9, содержающий третий гидроцилиндр 91, первую соединительную часть 92, вторую соединительную часть 93, корпус 911 третьего гидроцилиндра 91 вращается к бедру 6, которое выполнено во вращательном соединении с голенью 7, поршневой шток 912 третьего гидроцилиндра 91 вращается к первой соединительной части 92 и второй соединительной части 93, другой конец первой соединительной части 92 вращается к бедру 6, другой конец второй соединительной части 93 к голени 7, точка вращающейся оси между бедром 6 и голенью 7, точка вращающейся оси между первой соединительной частью 92 и бедром 6, точка вращающейся оси между второй соединительной частью 93 и голенью 7, а также точка вращающейся оси между первой соединительной частью 92 и второй соединительной частью 93 образуют четырехугольник.
[0117] Коленный сустав 9, выполненный с использованием четырехрычажной конструкции в качестве привода, а при одинаковом угле разворота голени 7 амплитуда колебания третьего гидроцилиндра 91 в четырехрычажной конструкции меньше.
[0118] Третий гидроцилиндр 91 является двухсторонним гидравлическим масляным цилиндром, и применяет гидроцилиндр с двойным выходом штанги. Для защиты поршневого штока 912 третьего гидроцилиндра 91, блок 911 третьего гидроцилиндра 91 крепится к монтажной опоре 913, которая может представлять собой цилиндрический шток, шарнирно соединенный в бедре 6, на одном конце соединения цилиндрического штока с блоком 911 по оси открывается полость для размещения поршневого штока 912. Монтажная рама 913 и блок цилиндра 911 могут быть закреплены винтами.
[0119] Как первая соединительная часть 92, так и вторая соединительная часть 93 могут быть дугообразными пластинами, а впадина дугообразных пластин обращается к точке вращения бедра 6 и голени 7, что соответствует пути передачи напряжения в элементах конструкции и продлевает срок службы. В других вариантах осуществления первая соединительная часть 92 и вторая соединительная часть 93 также могут быть моноблоками, S-образными пластинами, V-образными пластинами и т.д.
[0120] Согласно фиг. 21-22, общий внешний контур бедра 6 выполнен в виде четырехгранника, внутренняя часть бедра 6 снабжена полостью. Для дальнейшего снижения веса на поверхности бедра 6 выполнены многие отверстия для снижения веса, образующие ажурную конструкцию.
[0121] На одном конце бедра 6 против обеих боковых стенок установлены пара наружных выступов 62, на которых имеется отверстие вала. Между двумя наружными выступами 62 расположен внутренний выступ 63, также могут быть два выступа, которые расположены параллельно двум внутренним выступам 63. Для установки углового монитора монтажная канавка 64 установлена на наружной стороне наружного выступа 62, соответствующего отверстию вала.
[0122] Рядом с внутренним выступом 63 бедра 6 предусмотрено отверстие для штифта 65, ось которого опирается на ось внутреннего выступа 63, конец монтажной опоры 33 шарнирно соединен с отверстием для штифта 65, таким образом, третий гидроцилиндр 91 может целиком находиться в полости бедра 6.
[0123] На другом конце бедра 6, противоположном обеим боковым стенкам, образуется пара первых коленных выступов 66, на которой имеются отверстия вала. Первый коленный выступ 66 и наружный выступ 62 соответственно расположены на разных сторонах бедра 6, причем отверстие для вала на коленной пластине 66 перпендикулярно оси отверстия для вала на наружном выступе 62.
[0124] В целях дальнейшего уменьшения веса бедра 6 площадь поперечного сечения бедра 6 от одного конца к другому, расположенного вблизи наружного выступа 62, постепенно уменьшается.
[0125] На конце бедра, расположенном вблизи наружного выступа 62, размещено отверстие для кабеля 68, которое предназначено для прохода кабеля сквозь внутреннюю часть бедра 6, чтобы уменьшить обмотку линии при движении ног, и обеспечивать стабильную работу системы ног.
[0126] На конце бедра 6, расположенном вблизи первого коленного выступа 66, размещено сквозное отверстие 67, которое параллельно оси отверстия для вала первого коленного выступа 66. Сквозное отверстие 67 предназначено для шарнирного соединения первой соединительной части 92 с бедром 6.
[0127] Бедро 6 вращательно соединено с плечом 43 соединительной детали 4 посредством отверстия вала, расположенного на наружном выступе с обеспечением возможности внутреннего и наружного качания при помощи наружной силы. Бедро 6 вращательно соединено с голенью 7 посредством отверстия вала, расположенного на первом коленном выступе 66 с обеспечением возможности такого вращения в коленном суставе между бедром 6 и голенью 7, как у человека. Механизм бедра 6 простой, что оптимизирует общую конструкцию ног.
[0128] Согласно фиг. 23-24, голень 7 в целом похожа на четырёхгранник, голень 7 имеет пустую внутреннюю структуру, в целях дальнейшего уменьшения веса голени 7, на поверхности голени 7 установлены многие вторые отверстия для снижения веса, образуя ажурную конструкцию.
[0129] На противоположных двух боковых стенках одного конца голени 7 образуются пара вторых коленных выступов 72, на которых установлено отверстие вала, голень 7 вращательно соединена с бедром 6 посредством выравнивания отверстия вала для первого коленного выступа 66 и отверстия вала для второго коленного выступа 72 и вращения стержня.
[0130] В отверстии вала, близкого к второму коленному выступу 72 размещена перфорация 73, ось которой параллельна оси второго коленного выступа 72, перфорация 73 предназначена для шарнирного соединения второй соединительной части 93 с голенью 7. Ширина второго коленного выступа 72 постепенно уменьшается от перфорации 73 к отверстию вала.
[0131] Другой конец плеча 7 изгибается в изогнутую секцию, а концом плеча 7, удаленным от второго коленного выступа 72 является соединительный конец стопы 74, имеющий четырехугольную структуру. На торцевой поверхности соединительного конца стопы 74 снабжено монтажное отверстие 75, голень 7 расположена вокруг монтажного отверстия 75 и снабжена отверстием под штифт.
[0132] Для того, чтобы в большей степени соответствовать моделированию человеческого тела и повысить опорность движения ног, близкая изогнутая секция плеча 7 к соединительному концу стопы 74 изгибается в одну сторону, радиус внутренней кривой изгиба R2, центральный угол в β радиан; радиус внешней кривой изгиба R3, центральный угол в γ радиан. В частности, R2 = 54 мм, β= 52, R3 = 80 мм, γ=20. Близкая сторона голени 7 к отверстию вала изгибается частично, с радиусом изгиба R1 и центральным углом в α радиан. В частности, R1 = 100 мм, α= 26. На изображении по фиг. 24 центр R1 O и центр M R2 расположены по обе стороны голени 7, а изогнутые поверхности, соответствующие R1 и R2, расположены соответственно по противоположной стороне голени 7. В других вариантах осуществления данного изобретения R1, R2, R3, α, β, γ может быть разумно выбран в соответствии с фактическими потребностями.
[0133] Чтобы максимально уменьшить вес голени 7, на ней по краю монтажного отверстия 75 размещена удлинительная канавка 76.
[0134] Согласно фиг. 25, соединительный конец стопы 74 соединяется с суставом 8 стопы, который включает в себя чехол 81 и крышку 83, чехол 81 может быть изготовлен из резины, крышка 83 крепится болтами к соединительному концу стопы 74 футляра, чехол 81 может быть прикреплен к крышке 83 склейкой, сваркой или резьбой. На чехле 81 размещены многие противоскользящие канавки 811.
[0135] Для контроля напряженного состояния сустава 8 стопы, сустав 8 стопы также содержит эластичный внутренний мешок 82, заполненный жидкой средой, такой, как гидравлическое масло. Внутренний мешок 82 завернут чехлом 81, при этом на внутреннем мешке также размещен резьбовой участок 821, который проходит сквозь крышку 83 и закрепляется крепежной гайкой 84. Внутренний мешок 82, находящийся на резьбовой части 821, соединяется с датчиком 85 давления, который соединяется с внешним центральным блоком обработки, например с микросхемой или компьютером, по кабелю 10. Когда чехол 81 деформируется под воздействием силы, внутренний мешок 82 сдавливается, давление масла в нем повышается, и величина давления, обнаруженная датчиком 85 давления, передается по кабелю 10 в центральный блок обработки.
[0136] В процессе передвижении робота чехол 81 подвергается определенной деформации при нажатии на внешний предмет, чехол 81 нажимает пружинящий внутренний мешок 82, в результате чего давление во внутренном мешке 82 меняется, и датчик 85 давления может обнаружить это изменение давления в режиме реального времени. Датчик 85 давления может обнаружить силы в разных направлениях, так как давление с разных сторон от чехла 81 в конечном итоге передается на внутренний мешок 82.
[0137] Согласно фиг. 26, узел 1 управления включает корпус 11 и блок 12 управления, нога в сборе соединяется с корпусом 11 посредством монтажной опоры 2; в корпусе 11 размещены первый сервонасос 13, второй сервонасос 14, третий сервонасос 15, с которыми блок 12 управления соответственно соединяется для управления; Первый сервонасос 13 соединяется с первым гидроцилиндром 31, второй сервонасос 14 соединяется со вторым гидроцилиндром 51, третий сервонасос 15 соединяется с третьим гидроцилиндром 91, первый гидроцилиндр 31 предназначен для приведения переднего и заднего качания ног, второй гидроцилиндр 51 предназначен для приведения внутренного и наружного бокового качания ног, третий гидроцилиндр 91 предназначен для изгиба коленного сустава.
[0138] Корпус 1 может представлять собой прямоугольную конструкцию корпуса, всего 4 комплекта ног в сборе, которые устанавливаются в четырех углах корпуса 1 для образования четвероногого робота. Каждый комплект ног в сборе по одному соответствует первому сервонасосу 13, второму сервонасосу 14 и третьему сервонасосу 15, блок 12 управления может быть центральным блоком обработки или микросхемой, блок 12 управления соединяется с четырьмя наборами гидронасосов и управляет ими отдельно.
[0139] Первый сервонасос 13, второй сервонасос 14 и третий сервонасос 15 могут быть последовательно установлены в направлении длины корпуса 1. На боковых стенках корпуса 1 по направлению длины размещены отверстия под болтами, а первый сервонасос 13 и второй сервонасос 14 установлены на боковых стенках корпуса 1 по длине с помощью болтов. В боковых стенках корпуса 1 по ширине также имеются отверстия для гвоздей, а третий сервонасос 15 устанавливается на боковых стенках корпуса 1 по ширине с помощью болтов.
[0140] По традиции гидронасос и гидроцилиндр соединяются между собой гибкими масляными трубами, которые могут намотаться или зацепиться посторонними предметами при движении робота, что влияет на стабильную работу робота. В целях повышения стабильности работы робота в данном изобретения проводится оптимизация посредством отмены или сокращения использования масляных труб.
[0141] Согласно фиг. 6, 26 и 27, монтажная опора 2 крепится болтами к боковой стенке в направлении длины корпуса 11, первый гидроцилиндр 31 крепится болтами к монтажной опоре 2, а второй гидроцилиндр 51 крепится болтами к боковой стенке в направлении ширины корпуса 11.
[0142] На боковых стенках корпуса 11 по длине размещены первое отверстие 111 для выхода масла и первое отверстие 112 для входа масла, на первом сервонасосе 13 предусмотрены отверстия для входа и выхода масла, положение и расстояние между первым отверстием 111 для выхода масла и первым отверстием 112 для входа масла соответствует отверстию для входа и выхода масла для первого сервонасоса 13, чтобы после установки первого сервонасоса 13 отверстие для входа масла в первом сервонасосе 13 должно быть выровнено с первым отверстием 112 для входа масла на боковой стенке корпуса 11, а отверстие для выхода масла в первом сервонасосе 13 должно быть выровнено с первым отверстием 111 для выхода масла на боковой стенке корпуса 11. Контактное положение первого сервонасоса 13 с первым отверстием 111 для выхода масла и первым отверстием 112 для входа масла уплотняется уплотнительным кольцом.
[0143] На крепежной части 24 монтажной опоры 2 предусмотрены два первых масляных канала 29, расстояние между двумя первыми масляными каналами 29 совпадают с расстоянием между первым отверстием 111 для выхода масла и первым отверстием 112 для входа масла, чтобы после прикрепления монтажной опоры 2 к боковой стенке корпуса 11 первый масляный канал 29 выровнен с первым отверстием 111 для выхода масла, а другой первый масляный канал 29 выровнен с первым отверстием 112 для входа масла. Контактное положение монтажной опоры 2 с первым отверстием 111 для выхода масла и первым отверстием 112 для входа масла уплотняется уплотнительным кольцом. Для размещения уплотнительного кольца вокруг первого отверстия 111 и первого отверстия 112 корпуса 11 пропускается уплотнительная канавка, в который помещается уплотнительное кольцо.
[0144] На корпусе первого гидроцилиндра 31 также предусмотрены входные и выходные отверстия для масла, отверстие для входа масла первого гидроцилиндра 31 соединяется с первым масляным каналом 29, с первым отверстием 112 для входа масла, выходное отверстие первого гидроцилиндра 31 соединяется с первым масляным каналом 29, с первым отверстием 111 для выхода масла.
[0145] Понятно, что из-за спецификаций и конструкции первого гидроцилиндра 31 и первого сервонасоса 13 расстояние между входными и выходными отверстиями для входа и выхода масла на первом гидроцилиндре 31 может отличаться от расстояния между отверстиями для входа и выхода масла на первом сервонасосе 13 , при этом можно выбрать первое отверстие 111 для выхода масла или первое отверстие 112 для входа масла в качестве эталона, например, на изобретении в качестве эталона выбрано расстояние между отверстиями для входа и выхода масла на первом сервонасосе 13, при большом расстоянии между отверстиями для входа и выхода масла на первом гидроцилиндре 31, ось первого отверстия 111 выхода масла и/или первого отверстия 112 для входа масла и нормаль боковой стенки корпуса 11 расположены под острым углом. Если расстояние между отверстиями для входа и выхода масла на первом гидроцилиндре 31 одинаково с расстоянием между отверстиями для входа и выхода масла на первом сервонасосе 13, ось первого отверстия 111 выхода масла и первого отверстия 112 для входа масла расположены вертикально к боковой стенке корпуса 11.
[0146] Аналогичным образом, на боковых стенках корпуса 11 по ширине также размещены отверстия для ввода и выхода масла для подключения к второму сервонасосу 14 и второму гидроцилиндру 51.
[0147] Согласно фиг. 2, 5 и 7, на боковой стенке корпуса 11 также имеются второе отверстие 113 для выхода масла и второе отверстие 114 входа масла, которые предназначены для соединения с отверстием для входа и выхода масла на третьем сервонасосе 15.
[0148] В связи с тем, что третий гидроцилиндр 91 расположен на бедре 6, для уменьшения длины гибких масляного труба на монтажной опоре 2 также размещены два вторых масляных канала 28, которые проходят через первую боковую пластину 21 и вторую боковую пластину 22 монтажной опоры 2, расстояние между двумя вторыми масляными каналами 28 одинаково с расстоянием между вторым отверстием 113 для выхода масла и вторым отверстием 114 для входа масла. Контактное положение монтажной опоры 2 со вторым отверстием 113 для выхода масла и вторым отверстием 114 для входа масла уплотняется уплотнительным кольцом. Вокруг второго отверстия 113 для выхода масла и второго отверстия 114 для входа масла корпуса 11 шлифованы уплотнительные канавки, в которых размещены уплотнительные кольца.
[0149] Удаленный конец второго отверстия 113 для выхода масла и второго отверстия 114 для входа масла от корпуса 11 соответственно соединяется с отверстием для входа и выхода масла третьего гидроцилиндра 91, масляные трубы можно размещены внутри монтажной опоры 2, таким образом, с одной стороны, уменьшена длина масляной трубы, с другой стороны, уменьшена возможность зацепления или навивки масляных труб внешними посторонними предметами.
[0150] Согласно фиг. 29 и 30, для повышения взрывозащищенности робота внутреннее давление в корпусе 11 рассчитано на положительное давление, на верхней крышке корпуса 11 можно установить воздушник для заполнения корпуса 11 защитным газом. Поскольку в блоке 12 управления сервомоторы первого сервонасоса 13, второго сервонасоса 14 и третьего сервонасоса 15 расположены в корпусе 11, а первый цилиндр 3, второй цилиндра 4 и третий цилиндр 5 расположены снаружи корпуса 11, электрические компоненты робота изолированы и защищены корпусом 11, что обеспечивает эффект электрогидравлического разделения и повышает взрывозащищенность робота.
[0151] В зависимости от функциональных потребностей робота на верхней крышке корпуса 11 по меньшей мере установлено одно из следующего: лазерного дальномера 16, RTK антенны 17, взрывозащищенной кнопки 18 и взрывобезопасного звукового и светового сигнализатора 19. В частности, внешняя часть лазерного дальномера 16 герметична стеклянным колпаком, что повышает взрывозащищенность; RTK антенна 17, взрывобезопасная кнопка 18, взрывобезопасный звуковой и световой сигнализатор 19 принимают взрывозащиту линиями, места прохождения линии через корпус 11 покрываются клеем и герметичны для повышения взрывозащищенности.
[0152] Благодаря проектируемым отверстиям на боковой стенке корпуса 11 гидравлические насосы могут напрямую соединяться с отверстиями на боковой стенке корпуса 11, а первый гидроцилиндр 31 и второй гидроцилиндр 51 соответственно соединяются с проектируемыми отверстиями для входа и выхода масла на боковой стенке корпуса 11, что уменьшает использование масляных каналов и повышает стабильность работы робота.
[0153] В целях упрощения состава гидравлической системы для уменьшения объема, что позволяет уменьшить объем корпуса 11 и объем робота, облегчает нагрузку и работу робота, в данном изобретении применена гидравлическая система закрытого типа EHA.
[0154] Согласно фиг. 31 и 32, закрытая гидравлическая система EHA содержит двухсторонний насос k1, электродвигатель k2 для вращения двухстороннего насоса k1, основной смазочный канал I k3, основной смазочный канал II К4, аккумулятор k5, симметричный исполнительный блок k6; два впускных отверстия двухстороннего насоса k1 соответственно соединяются с основным смазочным каналом I k3 и основным смазочным каналом II k4; односторонний балансировочный клапан I k7 и второй клапан одностороннего балансировочного клапана II k8 соединяются с входами масла основного смазочного канала I k3 и основного смазочного канала II К4 соответственно.
[0155] Управляющий клапан k14 одностороннего балансировочного клапана I k7 соединяется с основным смазочным каналом II k4, расположенным на переднем участке второго клапана k13 одностороннего балансировочного клапана II k8; Управляющий клапан k14 одностороннего балансировочного клапана II k8 соединяется с основным смазочным каналом I k3, расположенным на переднем участке второго клапана k13 одностороннего балансировочного клапана I k7.
[0156] Первый клапан k10 одностороннего балансировочного клапана I k7 соединяется с первым клапаном k10 одностороннего балансировочного клапана II k8 в двух направлениях посредством переливного клапана;
[0157] Аккумулятор k5 соединяется со вторым клапаном k13 одностороннего балансировочного клапана II k8 и односторонним балансировочным клапаном I k7 соответственно посредством одностороннего клапана k16.
[0158] При вращении двухстороннего насоса k1 по часовой стрелке жидкое масло из двухстороннего насоса k1 поступает в верхнюю полость блока симметричных блоков исполнения k6 через второй клапан k13, первый клапан k10 одностороннего балансировочного клапана I k7, если блок симметричных блоков исполнения k6 находится под нагрузкой, то эта линия является маслом высокого давления. На возвратном канале нижней полости симметричного исполнительного блока k6 при необходимости включения управляющего клапана k14 одностороннего балансировочного клапана II k8 посредством управления давлением гидравлического масла высокого давления на переднем участке второго клапана k13 одностороннего балансировочного клапана I k7, масло может возвращаться из первого и второго канала k10 и k13 балансировочного клапана II в двусторонний насос k1, в случае снижения давления в верхней полости блока симметричного исполнения k6 управляющий клапан k14 одностороннего балансировочного клапана II k8 не включается, при этом симметричный исполнительный блок k6 сохраняет свое положение.
[0159] При вращении двухстороннего насоса k1 против часовой стрелки жидкое масло из двухстороннего насоса k1 поступает в низкую полость блока симметричных блоков исполнения k6 через второй клапан k13, первый клапан k10 одностороннего балансировочного клапана II k8, если блок симметричных блоков исполнения k6 находится под нагрузкой, то эта линия является маслом высокого давления. На возвратном канале нижней полости симметричного исполнительного блок k6 при необходимости включения управляющего клапана k14 одностороннего балансировочного клапана I k7 посредством управления давлением гидравлического масла высокого давления на переднем участке второго клапана k13 одностороннего балансировочного клапана I k7, масло может возвращаться из первого и второго канала k10 и k13 одностороннего балансировочного клапана в двусторонний насос k1, в случае снижения давления в низкой полости управляющий клапан k14 одностороннего балансировочного клапана I k7 не включается, при этом симметричный исполнительный блок k6 сохраняет свое положение, между тем односторонний балансировочный клапан II k8 находится в одностороннем потоке или в закрытом режиме, при этом электродвигатель системы k2 может остановиться, симметричный исполнительный блок k6 может сохранять положение в любом диапазоне движения. Переливной клапан, соединенный в двух направлениях между односторонним балансировочным клапаном I k7 и односторонним балансировочным клапаном II k8, выполняет защитную функцию и предназначен для ограничения давления в системе до определенного значения; для защиты от избыточного давления в системе, при превышении давления на одной стороне, включение переливной клапана этой же стороны для потока масла на сторону низкого давления.
[0160] Аккумулятор k5 предназначен, с одной стороны, для хранения масла, необходимого для закрытого гидравлического контура, и масла, которое необходимо заполнить в систему из-за утечки гидравлического масла, с другой стороны, для поддержания давления всасывания масла в двухстороннем насосе k1, для пополнения масла на стороне всасывания масла низкого давления. Маслонаполнительное отверстие k9 добавляет масло в систему через обратный клапан k16, а аккумулятор k5 добавляет масло на стороне низкого давления двухстороннего насоса k1 через обратный клапан k16.
[0161] В данном варианте осуществления двухсторонний насос k1 является зубчатым насосом, который включает ведущие и ведомые шестерни, находящиеся в зацеплении друг с другом. Балансировочный клапан имеет вставную конструкцию, характеризующуюся компактным потоком и небольшим размером, что способствует дальнейшему уменьшению объема интегрированного устройства клапана насоса и делает общую конструкцию более компактной. Аккумулятор k5 предствляет собой пружинный, поршневой или маслостойкий пружинный аккумулятор. Маслостойкий пружинный аккумулятор может быть надувным или мембранным. В настоящем изобретении представлен пружинный аккумулятор, который использует сжатие и удлинение пружины для хранения и высвобождения гидравлической энергии, пружина и масло под давлением отделены поршнем, сила пружины действует на гидравлическое масло через поршень.
[0162] В данном варианте изобретения применяется электрогидростатический контур на основе симметричного гидроцилиндра, по сравнению с асимметричным гидроцилиндром, который отличается объемом верхней и нижней полостей и расходом, что увеличивает сложность системы. Для данной системы не требуется контур добавления масла, состоящий из одностороннего клапана с двойным гидравлическим управлением и аккумулятора с большой энергией, поэтому принцип контура значительно упрощен; когда система применяется к суставам ног четвероногих роботов, балансировочный клапан на контуре служит двум целям: во-первых, он может запирать суставы робота под любым углом в диапазоне углов суставов, несмотря на то, приводит это к остановке или нет, эта функция означает, что робот может долго стоять в любой устойчивой позе, когда он останавливается; и во-вторых, он может быть адаптирован к соответствующим условиям нагрузки на приседания в четвертом квадранте, что позволяет роботу стабильно приседать. Не только обеспечение требования к режиму работы, но и простота и облегчение состава системы, значительное уменьшение необходимого объема и веса гидравлической системы, одновременное повышение надежности системы, а также обеспечение стояния в любом устойчивом положении в остановке.
[0163] В этом варианте осуществления симметричный исполнительный блок k6 конкретно является гидроцилиндром с двумя поршневыми штоками; Для двухстороннего насоса k1 данной системы применяется дозированный шестеренчатый насос, когда система нуждается в переменном потоке, расход и направление потока масла могут быть изменены путем изменения скорости вращения и направления вращения электродвигателя k2, который осуществляет управление в замкнутой системе частотой вращения двигателя k2 с помощью кодера с помощью привода 44 для осуществления точного управления частотой вращения и направлением вращения. Переливной клапан включает переливной клапан I 11 и переливной клапан II 12.
[0164] Гидравлическая система EHA закрытого типа может также содержать датчик давления k17, соединенный, соответственно, с первым клапаном k10 одностороннего балансировочного клапана I k7 и одностороннего балансировочного клапана II k8. Два датчика давления k17 предназначены для измерения давления масла основного смазочного канала I k3 и основного смазочного канала II k4 соответственно в системе, что удобно для динамического управления гидравлической системой и исполнительным механизмом.
[0165] Гидравлическая система EHA закрытого типа может также содержать датчик температуры k18, соединенный соответственно с односторонним балансировочным клапаном I и с односторонним балансировочным клапаном II, который предназначен для измерения утечки масла и температуры подпитки масла в системе, температура масла используется для установки сигнала сигнализации температуры в системе.
[0166] В данном устройстве все компоненты будут объединены в один клапанный блок, в том числе шестеренчатый насос не имеет отдельного корпуса, номинальная скорость вращения шестеренчатого насоса составляет 3000 об/мин, максимально допустимая скорость вращения должна достигать 4000 об/мин. Максимальный расход масляной жидкости гидроцилиндра с двумя поршневыми штоками составляет 3 л/мин, максимальное рабочее давление системы - 20 МПа. Приводной вал электродвигателя также проектируется и обрабатывается вместе, как зубчатый насос приводного вала, который соединяется с ведущей шестерней зубчатого насоса посредством муфты.
[0167] Традиционная конструкция гидравлической системы требует использования стандартного электродвигателя, муфты, стеклянного колпака и шестеренчатого насоса, что значительно увеличивает объем. По сравнению с традиционными гидравлическими системами интегрированное устройство насосных клапанов в данном решении решает проблему о слишком большом объеме системы закрытого типа и может быть применено в ходовых роботах, что избегает большого объема изделия, вызванного избыточной гидравлической системой, неудобной для нагрузки и применения.
[0168] Изобретение представляет вариант электрогидравлической комбинированной передачи четвероногого робота в соответствии с состоянием работы по его суставу. Суставы ног робота в основном делятся на сустав тазобедренного бокового качания, вращающийся тазобедренный сустав и коленный сустав. Наземная среда может быть разделена на ровную землю, склон, лестницу и т.д., независимо от того, в какой из этих сред у ножного робота существует рабочий режим, при котором четвероногий касается земли и регулирует положение, для туловища робота значит регулировку положения центра масс в направлении шести степеней свободы пространства, а для трех разных суставов, таких как сустава тазобедренного бокового качания, вращающегося тазобедренного сустава и коленного вращающегося сустава, в зависимости от положения суставов, их соответствующие режимы нагрузки при регулировке положения четвероногих суставов в касании земли отличаются друг от друга, при этом второй гидроцилиндр 51 и первый гидроцилиндр 31 находятся на туловище и имеют аналогичные рабочие условия. А третий гидроцилиндр 91 коленного сустава 9 установлен на ноге и его рабочий режим отличается от двух других гидроцилиндров.
[0169] Рабочий режим третьего гидроцилиндра 91 коленного сустава 9 показан ниже:
[0170] При случае, когда все ноги четвероногого робота касаются земли, существует два режима работы коленного сустава 9: во-первых, усадка поршневого штока гидроцилиндра под действием туловища робота и нагрузки, позволяя уменьшить угол коленного сустава 9, что относится к режиму работы с отрицательной нагрузкой; во-вторых, вытяжка поршневого штока гидроцилиндра под действием туловища робота и нагрузки, позволяя увеличить угол коленного сустава 9, что относится к режиму работы с положительной нагрузкой.
[0171] При случае, когда одна нога четвероногого робота оторвется от земли и выполнит определенную траекторию в воздухе, во время подъема ноги коленный вращающийся сустав должен преодолеть силу тяжести ноги, чтобы поршневой шток гидроцилиндра убирался, а соответствующий угол сустава становится меньше, что относится к режиму работы с положительной нагрузкой; во время приземления ноги на землю нога обычно имеет легкую конструкцию, в результате чего сила тяжести ноги меньше, для ускорения приземления ноги, если гидравлический цилиндр коленного сустава 9 растягивается, гидравлический насос при этом должен работать в насосном состоянии, что относится к режиму работы с положительной нагрузкой, при этом с учетом внешней силы, которая тянет коленный сустав 9 в экстремальной ситуации. В результате приведенного выше анализа режим работы коленного сустава 9 под нагрузкой у четвероногого робота показан на фиг. 33-34.
[0172] На фиг. 33 представлена схема расположения суставов четвероногого робота, коленный сустав с поворотным приводом гидроцилиндра + шатуна. В плоской системе координат, состоящей из силы нагрузки F и скорости вращения поршневого штока гидроцилиндра v, режим нагрузки третьего гидроцилиндра 91 коленного сустава 9 сосредоточен в первом, втором, третьем и четвертом квадранте, в каждом квадранте выполняется соответствующая функция, сила нагрузки и направление скорости поршневого штока гидроцилиндра показаны на смехе FV фиг. 33.
[0173] В данном варианте применяется гидравлическая система закрытого типа EHA на основе симметричного исполнительного блока, по сравнению с асимметричными гидроцилиндрами, гидравлическая система закрытого типа не требует контура подпитки масла, состоящего из одностороннего клапана с двойным гидравлическим управлением и большого аккумулятора, что значительно упрощает принцип контура, при этом на контуре устанавливаются односторонний балансировочный клапан I k7 и односторонний балансировочный клапан II k8, которые имеют две цели: во-первых, сустав робота может быть заблокирован под любым углом в диапазоне углов его сустава, независимо от того, находится ли робот в отключении или нет. Эта функция означает, что в случае остановки робот может долго стоять в любом устойчивом положении; во-вторых, можно адаптироваться к режиму нагрузки на приседание, соответствующему четвертому квадранту, чтобы робот плавно выполнил приседание. Не только обеспечение требования к режиму работы, но и простота облегчения состава системы, значительное уменьшение необходимого объема и веса гидравлической системы, одновременное повышение надежности системы, а также обеспечение стояния в любом устойчивом положении в остановке.
[0174] Режим работы бокового качания и тангажа гидроцилиндра механизма тазобедренного сустава:
[0175] На фиг. 35 (а) показан режим касания земли ног в тазобедренном суставе тангажа, а на фиг. 35(b) показан режим отрыва земли ног в тазобедренном суставе тангажа; на фиг. 36(a) показан режим касания земли ног в тазобедренном суставе бокового качания, а на фиг. 36(b) показан режим отрыва земли ног в тазобедренном суставе бокового качания.
[0176] Для тазобедренного сустава бокового качания режим работы под нагрузкой изменяется в зависимости от угла тазобедренного сустава бокового качания;
[0177] Когда ноги касаются земли, сила, действующая на ноги, поднимается вверх, и крутящий момент, возникающий на тазобедренном суставе бокового качания и тазобедренном суставе тангажа, имеет разное направление в зависимости от положения ноги относительно корпуса 11. Как показано на режиме касания земли ног в тазобедренном суставе тангажа на фиг. 35 (а) и режиме касания земли ног в тазобедренном суставе бокового качания на фиг. 36 (а), когда ноги находятся в левом от средней линии ОА, как показано OB, крутящий момент от пола на тазобедренном суставе бокового качания и тазобедренном суставе тангажа находятся в направлении по часовой стрелке, а когда ноги находятся в правом от средней линии ОА, как показано в OB′,крутящий момент от пола на тазобедренном суставе бокового качания и тазобедренном суставе тангажа находятся против часовой стрелки. Таким образом, когда тазобедренный сустав бокового качания и тазобедренный сустав тангажа качаются в обоих направлениях в положении OB или OB', возникается четырехквадрантный режим работы с нагрузкой, как положительная, так и отрицательная нагрузка.
[0178] Гидравлическая система закрытого типа EHA в данном изобретении унифицирует гидравлический принцип тазобедренного сустава бокового качания и тангажа и вращающегося коленного сустава четвероногого робота при применении с учетом внешней силы, тянущей коленный сустав в экстремальных ситуациях, а также двусторонней отрицательной нагрузки на все суставы c обеспечением удобства универсализации и обслуживания последующих компонентов.
[0179] Односторонний балансировочный клапан I k7 и односторонний балансировочный клапан II k8 на гидравлическом контуре могут избежать перехода двухстороннего насоса k1 в мотор при отрицательной нагрузке и превращения электродвигателя в генератор, таким образом, избежать затруднений для последующего управления электрической энергией, например в следующем режиме работы: когда направление совместного усилия и направление движения гидравлического цилиндра одинаково, все они направлены вниз, при этом он переходит в отрицательную нагрузку со снижением давлением в верхней полости гидравлического цилиндра и невозможностью открытия одностороннего балансировочного клапана II k8 из-за недостатки давления для управления его масляного канала, в результате чего масляная жидкость из нижней полости закрывается в полости и трубопроводе гидроцилиндра, не возвращаясь в двухсторонний насос k1, чтобы обеспечить сохранение положения гидроцилиндра при отрицательной нагрузке и избежать ненормальной работы двухстороннего насоса k1.
[0180] Вышеизложенное описание предпочтительных примеров осуществления изобретения и объем изобретения не обязательно ограничиваются данным описанием, в результате чего все эквивалентные изменения в соответствии со структурой, формой и принципом действия настоящей заявки должны входить в объем настоящего изобретения.
Изобретение относится к области робототехники и может быть использовано в устройствах взрывозащищенных шагающих роботов. Робот содержит узел управления и ноги в сборе, при этом узел управления включает в себя корпус, заполненный защитным газом под давлением, а ноги в сборе содержат гидроцилиндр, установленный в корпусе и связанный с сервонасосом, установленным вне корпуса, при этом в стенке корпуса выполнены отверстия для входа и выхода масла, ноги в сборе включают в себя монтажную опору, механизм переднего и заднего качания ног, механизм тазобедренного сустава и ног. Механизм переднего и заднего качания ног и механизм тазобедренного сустава соединены вне корпуса посредством монтажной опоры и соосной передачи с возможностью вращения механизма тазобедренного сустава, а с механизмом ног механизм тазобедренного сустава соединен с возможностью приведения механизма ног к внутреннему и наружному боковому качанию. Использование изобретения позволяет расширить технологические возможности робота и повысить надежность его работ. 13 з.п. ф-лы, 36 ил.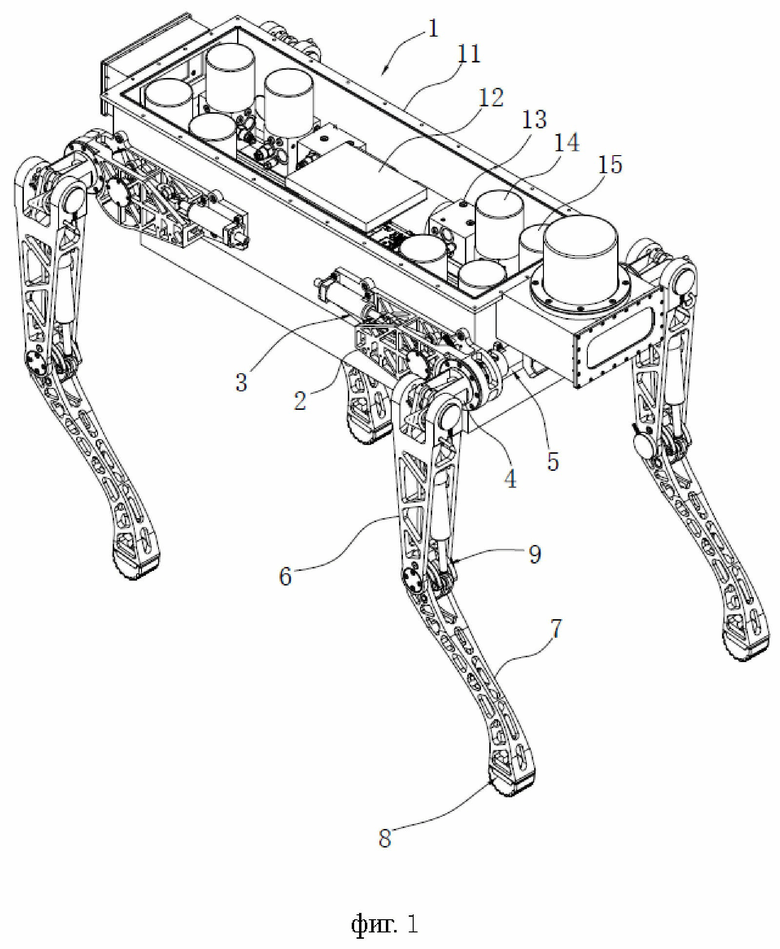
1. Взрывозащищенный шагающий робот, содержащий узел (1) управления и ноги в сборе,
при этом узел (1) управления включает в себя корпус (11), заполненный защитным газом под давлением, и блок (12) управления для соединения ног в сборе с корпусом (11), а
ноги в сборе включают в себя монтажную опору (2), механизм (3) переднего и заднего качания ног, механизм тазобедренного сустава и механизм ног, причем механизм (3) переднего и заднего качания ног и механизм тазобедренного сустава соединены вне корпуса (11) посредством монтажной опоры (2) и соосной передачи с возможностью вращения механизма тазобедренного сустава, а с механизмом ног механизм тазобедренного сустава соединен с возможностью приведения механизма ног к внутреннему и наружному боковому качанию,
при этом механизм тазобедренного сустава включает в себя соединительную деталь (4), вращательно соединенную с монтажной опорой (2), и механизм (5) привода бокового качания, расположенный между соединительной деталью (4) и механизмом ног и выполненный с возможностью передачи усилия механизму ног для внутреннего и наружного бокового качания, а на соединительной детали (4) размещена ведомая шестерня (44) с возможностью коаксиального фиксированного соединения,
причем механизм (3) переднего и заднего качания ног включает в себя узел ведущей шестерни и силовой узел, выполненный с возможностью приведения узла ведущей шестерни во вращение, а узел ведущей шестерни вращательно соединен с монтажной опорой (2) и расположен в зацеплении с ведомой шестерней (44),
при этом силовой узел включает в себя первый гидроцилиндр (31), первый рельс (32) скольжения, блок (53) скольжения и первый шатун (35), причем первый рельс (32) скольжения закреплен на монтажной опоре (2) в направлении по его длине, перпендикулярном вращательной оси соединительной детали (4), корпус (911) первого гидроцилиндра (31) закреплен на монтажной опоре (2), поршневой шток (311) первого гидроцилиндра (31) соединен с блоком (53) скольжения и выполнен с возможностью приведения блока (53) скольжения в перемещение относительно первого рельса (32) скольжения, один конец первого шатуна (35) шарнирно соединен с блоком (53) скольжения, а другой конец первого шатуна (35) соединен с узлом ведущей шестерни с возможностью эксцентричного вращения,
причем первый гидроцилиндр (31) расположен вне корпуса (11) и соединен с первым сервонасосом (13), размещенным в корпусе (11), через первое отверстие (111) для выхода масла и первое отверстие (112) для входа масла, которые выполнены в боковой стенке корпуса (11).
2. Робот по п. 1, отличающийся тем, что соединительная деталь (4) выполнена в виде монтажной трубы (41) с парой плеч (43), при этом пара плеч (43) установлена вдоль оси монтажной трубы (41) и закреплена на одном конце монтажной трубы (41), а другим концом монтажная труба (41) вращательно соединена с монтажной опорой (2), причем один конец плеч (43) удален от монтажной трубы (41) и выполнен с отверстием вала, ось которого расположена перпендикулярно оси монтажной трубы (41).
3. Робот по п. 2, отличающийся тем, что механизм (5) привода бокового качания содержит второй гидроцилиндр (51), второй рельс (52) скольжения, блок (53) скольжения и второй шатун (54), при этом второй рельс (52) скольжения закреплен вдоль оси на внутренней стенке монтажной трубы (41), второй гидроцилиндр (51) соединен с одним концом монтажной трубы (41), удаленным от плеч (43), и выполнен с возможностью приведения блока (53) скольжения в перемещение относительно второго рельса (52) скольжения, причем один конец второго шатуна (54) шарнирно соединен с блоком (53) скольжения, а другой конец второго шатуна (54) выступает из монтажной трубы (41) к плечам (43).
4. Робот по п. 3, отличающийся тем, что в корпусе (11) размещен второй сервонасос (14), а механизм тазобедренного сустава содержит второй гидроцилиндр (51), причем боковая стенка корпуса (11) выполнена с отверстиями для входа и выхода масла с возможностью соединения второго сервонасоса (14) со вторым гидроцилиндром (51).
5. Робот по любому из пп. 1-4, отличающийся тем, что в монтажной опоре (2) выполнен первый масляный канал (29) с возможностью соединения первого отверстия (111) для выхода масла и первого отверстия (112) для входа масла соответственно.
6. Робот по п. 5, отличающийся тем, что в корпусе (11) размещен третий сервонасос (15), а механизм ног содержит третий гидроцилиндр (91), причем боковая стенка корпуса (11) выполнена со вторым отверстием (113) для выхода масла и вторым отверстием (114) для входа масла, которые соединены с третьим сервонасосом (15).
7. Робот по п. 6, отличающийся тем, что в монтажной опоре (2) выполнен второй масляный канал (28) с возможностью соединения второго отверстия (113) для выхода масла и второго отверстия (114) для входа масла соответственно, а второй масляный канал (28) связан с третьим гидроцилиндром (91).
8. Робот по любому из пп. 4-7, отличающийся тем, что на двух концах отверстий для входа и выхода масла корпуса (11) установлены уплотнительные кольца.
9. Робот по п. 8, отличающийся тем, что в корпусе (11) выполнены канавки для установки уплотнительных колец.
10. Робот по любому из пп. 1, 3, 4-9, отличающийся тем, что механизм ног содержит бедро (6), голень (7) и коленный сустав (9), при этом бедро (6) вращательно соединено с голенью (7), а коленный сустав (9) содержит первую соединительную часть (92) и вторую соединительную часть (93), причем корпус (911) третьего гидроцилиндра (91) вращательно соединен с бедром (6), поршневой шток (912) третьего гидроцилиндра (91) вращательно присоединен к первой соединительной части (92) и второй соединительной части (93), а другой конец первой соединительной части (92) вращательно соединен с бедром (6), при этом другой конец второй соединительной части (93) вращательно соединен с голенью (7), причем точка оси вращения между бедром (6) и голенью (7), точка оси вращения между первой соединительной частью (92) и бедром (6), точка оси вращения между второй соединительной частью (93) и голенью (7), а также точка оси вращения между первой соединительной частью (92) и второй соединительной частью (93) образуют четырехугольник.
11. Робот по любому из пп. 1, 3, 4-9, отличающийся тем, что механизм ног содержит сустав (8) стопы, который включает в себя чехол (81) и пружинящий внутренний мешок (82), расположенный в чехле (81), причем внутренний мешок (82) соединен с датчиком (85) давления.
12. Робот по любому из пп. 1, 3, 4-9, отличающийся тем, что на корпусе (11) установлено по меньшей мере одно из следующего: лазерный дальномер (16), RTK антенна (17), взрывобезопасная кнопка (18) или взрывобезопасный звуковой и световой сигнализатор (19).
13. Робот по п. 12, отличающийся тем, что вокруг лазерного дальномера (16) размещен стеклянный колпак для уплотнения.
14. Робот по п. 12, отличающийся тем, что кабель RTK антенны (17), взрывобезопасной кнопки (18), взрывобезопасного звукового и светового сигнализатора (19) выполнен взрывозащищенным, а места прохождения кабеля через корпус (11) покрыты клеем для уплотнения.
| CN 113184078 A, 30.07.2021 | |||
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |
| АВТОНОМНАЯ РОБОТИЗИРОВАННАЯ ЖИЗНЕННАЯ ФОРМА | 2011 |
|
RU2559715C2 |
| CN 101811525 A, 25.08.2010 | |||
| CN 114800464 А, 29.07.2022 | |||
| US 2006041332 A1, 23.02.2006. | |||

