Известны способы управления работой индукционного зарядного устройства, включающие по меньшей мере один шаг, на котором выполняют распознавание посторонних объектов.
Изобретение относится к способу управления работой индукционного зарядного устройства, характеризующемуся тем, что по меньшей мере на одном его шаге посредством узла управления и/или регулирования индукционного зарядного устройства выполняют распознавание посторонних объектов, причем по меньшей мере на одном шаге способа распознавание посторонних объектов выполняют в зависимости от по меньшей мере одного параметра передачи мощности. Это выгодно тем, что позволяет сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. Преимущество изобретения также состоит в том, что при выполнении распознавания посторонних объектов может учитываться риск повреждения индукционного зарядного устройства. В соответствии с изобретением по меньшей мере на одном шаге способа распознавание посторонних объектов приостанавливают в зависимости от снижения значения параметра передачи мощности ниже граничного значения, в частности нижнего граничного значения, в частности в зависимости от перехода вниз через граничное значение передаваемой мощности и/или тока в катушке возбуждения. Это позволяет избегать перерывов в процессе зарядки, обусловленных распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается.
Под индукционным зарядным устройством понимается, в частности, устройство для зарядки аккумуляторных устройств, в частности аккумуляторов. Такое устройство предпочтительно содержит по меньшей мере один узел управления и/или регулирования, предусмотренный по меньшей мере для управления процессом зарядки и/или регулирования этого процесса. В особенно предпочтительном случае под таким устройством понимается, в частности, зарядное устройство, предусмотренное для того, чтобы в режиме зарядки передавать зарядную энергию в по меньшей мере одно аккумуляторное устройство индуктивно, т.е. за счет индукции. При этом под режимом зарядки понимается, в частности, рабочий режим, в котором аккумуляторное устройство снабжается энергией извне. В предпочтительном случае под режимом зарядки понимается, в частности, рабочий режим, в котором аккумуляторное устройство временно накапливает, или запасает, энергию, подводимую в него извне. При этом под аккумуляторным устройством понимается, в частности, устройство для временного хранения электрической энергии, в частности аккумулятор. В предпочтительном случае под аккумуляторным устройством понимается, частности, перезаряжаемый накопитель энергии. Специалисту известны различные аккумуляторные устройства, подходящие для осуществления изобретения, среди которых, в частности, особенно предпочтительным является литий-ионный аккумулятор.
Далее, под узлом управления и/или регулирования понимается, в частности, узел, содержащий по меньшей мере одну электронную схему управления. Под электронной схемой управления понимается, в частности, узел, содержащий процессорное устройство и запоминающее устройство, а также хранящуюся в запоминающем устройстве операционную систему (программу). Выражение "предусмотренный" следует понимать, в частности, как специально запрограммированный, выполненный, установленный и/или оснащенный. Когда тот или иной объект предусмотрен для выполнения определенной функции, под этим понимается, в частности, то, что этот объект выполняет и/или реализует эту определенную функцию по меньшей мере в одном режиме применения и/или рабочем (эксплуатационном) состоянии.
Под распознаванием посторонних объектов понимается, в частности, обнаружение и/или проверка присутствия посторонних объектов, в частности в окрестности индукционного зарядного устройства и/или аккумуляторного устройства. В предпочтительном случае под распознаванием посторонних объектов понимается, в частности, обнаружение и/или проверка присутствия посторонних объектов, которые расположены в области контакта между индукционным зарядным устройством и аккумуляторным устройством и во время работы зарядного устройства в режиме зарядки могут отрицательно сказываться на процессе зарядки. При этом под посторонними объектами понимаются, в частности, металлические и/или магнитные детали, части, изделия или другие объекты.
Под параметром передачи мощности понимается, в частности, параметр, который во время работы зарядного устройства в режиме зарядки характеризует, предпочтительно в количественном отношении, поток электромагнитной энергии между индукционным зарядным устройством и заряжаемым аккумуляторным устройством. Параметр передачи мощности предпочтительно представляет собой мощность, передаваемую между индукционным зарядным устройством и заряжаемым аккумуляторным устройством, электрический ток в зарядной катушке, электрическое напряжение, приложенное к зарядной катушке, температуру зарядной катушки, мощность, принимаемую сетевым блоком питания, коэффициент связи между индуктивно связанными зарядными катушками или иной параметр передачи мощности, подходящий с точки зрения специалиста.
Кроме того, индукционное зарядное устройство предпочтительно содержит по меньшей мере один сенсорный узел, предназначенный по меньшей мере для регистрации по меньшей мере одного параметра передачи мощности. В этой связи под сенсорным узлом понимается, в частности, узел, предусмотренный для того, чтобы воспринимать по меньшей мере один параметр и/или физическое свойство, причем такое восприятие может происходить активно, в частности путем выработки и посылки электрического измерительного сигнала, и/или пассивно, в частности путем регистрации изменений свойства чувствительного компонента. В частности, сенсорный узел предусмотрен для того, чтобы в процессе зарядки непрерывно или квазинепрерывно регистрировать по меньшей мере один параметр передачи мощности.
Далее предлагается вариант осуществления способа, в котором по меньшей мере на одном его шаге в зависимости от по меньшей мере одного параметра передачи мощности определяют по меньшей мере один параметр точности распознавания посторонних объектов. Этим достигается упрощение выполнения распознавания посторонних объектов. Можно сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. Под параметром точности понимается, в частности, параметр, который по меньшей мере частично характеризует точность распознавания посторонних объектов. Параметр точности предпочтительно представляет собой некоторое число дискретных точек частоты, некоторое число циклов качания (частоты) или иной параметр точности, подходящий с точки зрения специалиста.
Далее предлагается вариант осуществления способа, в котором по меньшей мере на одном его шаге в зависимости от по меньшей мере одного параметра передачи мощности определяют по меньшей мере одну частотность выполнения распознавания посторонних объектов. Это позволяет уменьшить количество выполнений распознавания посторонних объектов. Можно сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. В этой связи под частотностью выполнения понимается, в частности, частота выполнения распознавания посторонних объектов в процессе зарядки. В частности, в процессе зарядки с передачей средней мощности, например мощности от 5 до 10 Вт, частотность выполнения распознавания посторонних объектов может быть уменьшена по сравнению с передачей высокой мощности, например мощности свыше 10 Вт. При зарядке с передачей малой мощности выполнение распознавания посторонних объектов может быть прекращено полностью.
Кроме того, предлагается вариант осуществления способа, в котором по меньшей мере на одном его шаге распознавание посторонних объектов выполняют в зависимости от по меньшей мере одного изменения параметра передачи мощности во времени, в частности от размаха его колебаний и/или его градиента. Этим достигается уменьшение риска повреждения индукционного зарядного устройства. Можно сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. Под размахом колебаний понимается, в частности, разность между максимальным и минимальным значениями изменяющегося во времени параметра. Под градиентом понимается, в частности, мера происходящего в единицу времени увеличения или снижения значения изменяющегося во времени параметра, предпочтительно угол наклона касательной (к кривой изменения указанного параметра во времени).
Далее предлагается вариант осуществления способа, в котором по меньшей мере на одном его шаге распознавание посторонних объектов выполняют в зависимости от превышения значением параметра передачи мощности граничного значения, в частности верхнего граничного значения, в частности в зависимости от превышения граничного значения передаваемой мощности и/или тока в катушке возбуждения. Благодаря этому перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов, можно ограничить случаями риска повреждения индукционного зарядного устройства. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. Уменьшается риск повреждения индукционного зарядного устройства.
Кроме того, предлагается вариант осуществления способа, в котором по меньшей мере на одном его шаге в зависимости от по меньшей мере одного параметра передачи мощности определяют по меньшей мере одну длительность выполнения во времени распознавания посторонних объектов. Благодаря этому сокращаются во времени перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. Под длительностью выполнения понимается, в частности, продолжительность качания и/или цикла качания частоты во времени. В частности, для коррекции длительности выполнения распознавания посторонних объектов может варьироваться сканируемый при качании частотный диапазон и/или число дискретных точек частоты при качании.
Кроме того, предлагается индукционное зарядное устройство, в частности для осуществления предлагаемого в изобретении способа, содержащее по меньшей мере один узел управления и/или регулирования, причем узел управления и/или регулирования предусмотрен по меньшей мере для того, чтобы выполнять распознавание посторонних объектов в зависимости от по меньшей мере одного параметра передачи мощности. Это выгодно тем, что позволяет сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается. Преимущество изобретения также состоит в том, что при выполнении распознавания посторонних объектов может учитываться риск повреждения индукционного зарядного устройства.
Далее предлагается вариант осуществления изобретения, в котором узел управления и/или регулирования индукционного зарядного устройства предусмотрен по меньшей мере для того, чтобы в зависимости от по меньшей мере одного параметра передачи мощности определять по меньшей мере один параметр точности распознавания посторонних объектов. Этим достигается упрощение выполнения распознавания посторонних объектов. Можно сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки. Продолжительность зарядки сокращается.
Кроме того, предлагается вариант осуществления изобретения, в котором узел управления и/или регулирования индукционного зарядного устройства предусмотрен по меньшей мере для того, чтобы в зависимости от по меньшей мере одного параметра передачи мощности определять по меньшей мере одну частотность выполнения распознавания посторонних объектов. Это позволяет уменьшить количество выполнений распознавания посторонних объектов. Можно сократить перерывы в процессе зарядки, обусловленные распознаванием посторонних объектов. Достигаются долгие циклы зарядки.
При этом предлагаемый в изобретении способ и/или предлагаемое в изобретении индукционное зарядное устройство не ограничивается(-ются) описанными выше применением изобретения и вариантом его осуществления. В частности, предлагаемый в изобретении способ и/или предлагаемое в изобретении индукционное зарядное устройство для реализации раскрытого в описании принципа работы может/могут иметь число отдельных элементов, деталей и узлов, а также шагов осуществления способа, отличное от указанных в описании. Кроме того, признаки, раскрытые для предлагаемого в изобретении индукционного зарядного устройства, аналогичным образом относятся и к способу. Помимо этого, для диапазонов значений, указанных в настоящем описании, следует считать, что значения, находящиеся в пределах названных границ этих диапазонов, также являются раскрытыми, и эти значения могут применяться любым образом.
Другие преимущества изобретения выявляются в нижеследующем описании его осуществления, поясняемом чертежами. На чертежах представлен пример осуществления изобретения. На чертежах, в описании и в формуле изобретения многочисленные признаки содержатся в определенной комбинации. Исходя из целесообразности, специалист сможет также рассматривать эти признаки в отдельности и объединять их в другие рациональные комбинации. На чертежах показано:
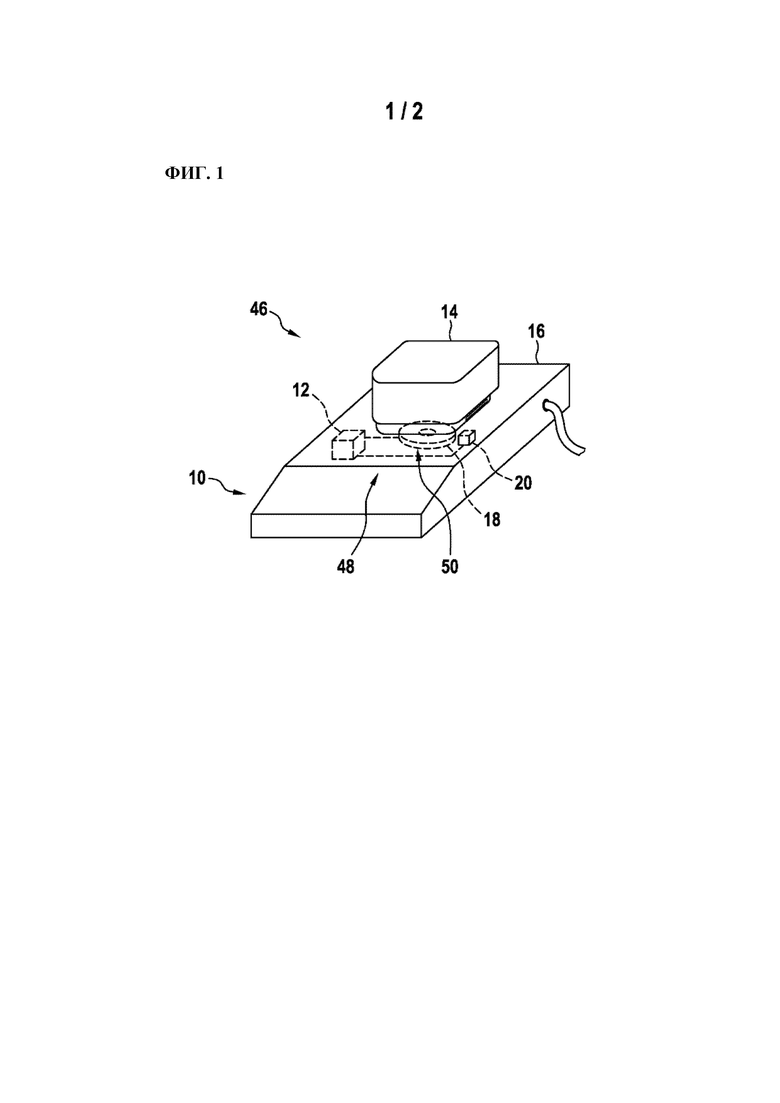
на фиг. 1 – схематическое изображение индукционного зарядного устройства и
на фиг. 2 – блок-схема осуществления предлагаемого в изобретении способа.
На фиг. 1 показано индукционное зарядное устройство 10. Кроме того, на фиг. 1 показано заряжаемое аккумуляторное устройство 14. Индукционное зарядное устройство 10 предусмотрено для зарядки аккумуляторного устройства 14. Индукционное зарядное устройство 10 образует первичную сторону зарядной системы 46. Заряжаемое аккумуляторное устройство 14 представляет собой аккумулятор ручной машины. Вместе с тем, при помощи индукционного зарядного устройства 10 можно заряжать и другие аккумуляторы, подходящие с точки зрения специалиста. На фиг. 1 индукционное зарядное устройство 10 и заряжаемое им аккумуляторное устройство 14 показаны в режиме зарядки. При этом аккумуляторное устройство 14 поставлено на верхнюю сторону корпуса 16 индукционного зарядного устройства 10 и заряжается без проводов посредством зарядной катушки 18 индукционного зарядного устройства 10.
Индукционное зарядное устройство 10 содержит узел 12 управления и/или регулирования. Индукционное зарядное устройство 10 содержит электронный зарядный узел 48, в состав которого входит узел 12 управления и/или регулирования. Кроме того, в состав электронного зарядного узла 48 входит схема 50 колебательного контура. Схема 50 колебательного контура содержит зарядную катушку 18.
Во время работы индукционного зарядного устройства 10 в режиме зарядки в зависимости от по меньшей мере одного параметра передачи мощности выполняется распознавание посторонних объектов. При распознавании посторонних объектов проверяется, не имеется посторонних объектов, которые находятся между индукционным зарядным устройством 10 и аккумуляторным устройством 14 или просто расположены на индукционном зарядном устройстве 10 и которые могут отрицательно сказаться на работе в режиме зарядки или причинить вред оператору или индукционному зарядному устройству 10. Распознавание посторонних объектов осуществляется в индукционном зарядном устройстве 10 путем выполнения способа распознавания посторонних объектов посредством узла 12 управления и/или регулирования индукционного зарядного устройства 10. Узел 12 управления и/или регулирования индукционного зарядного устройства 10 во время работы в режиме зарядки предусмотрен для того, чтобы выполнять распознавание посторонних объектов в зависимости от по меньшей мере одного параметра передачи мощности.
На фиг. 2 приведена блок-схема осуществления способа распознавания посторонних объектов во время работы индукционного зарядного устройства в режиме зарядки. На первом шаге 30 способа узлом 12 управления и/или регулирования инициируется распознавание посторонних объектов. Последующее распознавание посторонних объектов выполняется на шаге 32 способа в зависимости от по меньшей мере одного параметра передачи мощности. Параметр мощности представляет собой, в частности, параметр, который во время работы зарядного устройства в режиме зарядки характеризует, предпочтительно в количественном отношении, поток электромагнитной энергии между индукционным зарядным устройством 10 и заряжаемым аккумуляторным устройством 14. Параметр передачи мощности предпочтительно представляет собой электрическую мощность, передаваемую между индукционным зарядным устройством 10 и заряжаемым аккумуляторным устройством 14, электрический ток в зарядной катушке 18, электрическое напряжение, приложенное к зарядной катушке 18, температуру зарядной катушки 18, мощность, принимаемую сетевым блоком питания, и т.д. Узел 12 управления и/или регулирования содержит сенсорный узел 20, предусмотренный для того, чтобы во время работы индукционного зарядного устройства в режиме зарядки непрерывно или квазинепрерывно регистрировать параметр передачи мощности.
Для оптимизации распознавания посторонних объектов на основании параметра передачи мощности посредством узла 12 управления и/или регулирования могут определяться различные параметры для настройки, или регулирования, распознавания посторонних объектов. По меньшей мере на одном шаге 34 способа в зависимости от по меньшей мере одного параметра передачи мощности определяется по меньшей мере один параметр точности распознавания посторонних объектов, например число дискретных точек частоты и/или число циклов качания (частоты). По меньшей мере на одном шаге 36 способа в зависимости от по меньшей мере одного параметра передачи мощности определяется по меньшей мере одна частотность, в частности частота, выполнения распознавания посторонних объектов в процессе зарядки. В частности, в процессе зарядки с передачей средней мощности, например мощности от 5 до 10 Вт, частотность выполнения распознавания посторонних объектов может быть уменьшена по сравнению с частотностью выполнения распознавания посторонних объектов в процессе зарядки с передачей высокой мощности, например мощности свыше 10 Вт. При зарядке с передачей малой мощности выполнение распознавания посторонних объектов может быть прекращено полностью. По меньшей мере на одном шаге 38 способа в зависимости от по меньшей мере одного параметра передачи мощности определяется по меньшей мере одна длительность выполнения во времени распознавания посторонних объектов, в частности продолжительность качания и/или цикла качания частоты во времени. Шаги 34, 36, 38 способа для определения параметров настройки распознавания посторонних объектов могут выполняться в комбинации или по отдельности.
Дополнительно, по меньшей мере на одном шаге 40 способа распознавание посторонних объектов выполняется в зависимости от по меньшей мере одного изменения параметра передачи мощности во времени, в частности от размаха его колебаний и/или его градиента. В частности, при инициализации процесса зарядки однократно может выполняться полное распознавание посторонних объектов. Если оно прошло без появления ошибок, распознавание посторонних объектов деактивируется (отключается) и запускается процесс зарядки, во время которого от индукционного зарядного устройства 10 в аккумуляторное устройство 14 передается энергия. Во время этой передачи энергии узел 12 управления и/или регулирования контролирует процесс зарядки на предмет отклонений от нормы. Если узел 12 управления и/или регулирования обнаружит изменение во времени параметра передачи мощности, в частности размаха его колебаний и/или его градиента, процесс зарядки прерывается, и инициируется распознавание посторонних объектов.
По меньшей мере на одном шаге 42 способа распознавание посторонних объектов приостанавливается в зависимости от снижения значения параметра передачи мощности ниже граничного значения, в частности нижнего граничного значения. По меньшей мере на одном шаге 44 способа распознавание посторонних объектов выполняется в зависимости от превышения значением параметра передачи мощности граничного значения, в частности верхнего граничного значения. В частности, выполнение распознавания посторонних объектов в процессе зарядки приостанавливается при переходе вниз через нижнее граничное значение передаваемой мощности, например, при снижении передаваемой мощности до значения, меньшего 5 Вт. При превышении заданного граничного значения передаваемой мощности распознавание посторонних объектов возобновляется.

Группа изобретений относится к индукционной зарядке аккумуляторов электрических транспортных средств. Способ управления работой индукционного зарядного устройства заключается в том, что по меньшей мере на одном его шаге посредством узла управления и/или регулирования индукционного зарядного устройства выполняют распознавание посторонних объектов, причем по меньшей мере на одном его шаге распознавание посторонних объектов выполняют в зависимости от параметра передачи мощности. При этом по меньшей мере на другом его шаге распознавание посторонних объектов приостанавливают в зависимости от снижения значения параметра передачи мощности ниже граничного значения, в частности нижнего граничного значения. Также заявлено индукционное зарядное устройство для осуществления способа управления работой индукционного зарядного устройства, позволяющее распознавать посторонние объекты в зависимости от параметра передачи мощности. Технический результат заключается в сокращении перерывов в процессе зарядки, обусловленных распознаванием посторонних объектов, что позволяет обеспечивать долгие циклы зарядки и сокращать продолжительность зарядки. 2 н. и 7 з.п. ф-лы, 2 ил.
1. Способ управления работой индукционного зарядного устройства (10), характеризующийся тем, что по меньшей мере на одном его шаге (30) посредством узла (12) управления и/или регулирования индукционного зарядного устройства (10) выполняют распознавание посторонних объектов, причем по меньшей мере на одном его шаге (32) распознавание посторонних объектов выполняют в зависимости от по меньшей мере одного параметра передачи мощности, отличающийся тем, что по меньшей мере на одном его шаге (42) распознавание посторонних объектов приостанавливают в зависимости от снижения значения параметра передачи мощности ниже граничного значения, в частности нижнего граничного значения.
2. Способ по п. 1, отличающийся тем, что по меньшей мере на одном его шаге (34) в зависимости от по меньшей мере одного параметра передачи мощности определяют по меньшей мере один параметр точности распознавания посторонних объектов.
3. Способ по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере на одном его шаге (36) в зависимости от по меньшей мере одного параметра передачи мощности определяют по меньшей мере одну частотность выполнения распознавания посторонних объектов.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере на одном его шаге (40) распознавание посторонних объектов выполняют в зависимости от по меньшей мере одного изменения параметра передачи мощности во времени, в частности от размаха его колебаний и/или его градиента.
5. Способ по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере на одном его шаге (44) распознавание посторонних объектов выполняют в зависимости от превышения значением параметра передачи мощности граничного значения, в частности верхнего граничного значения.
6. Способ по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере на одном его шаге (38) в зависимости от по меньшей мере одного параметра передачи мощности определяют по меньшей мере одну длительность выполнения распознавания посторонних объектов.
7. Индукционное зарядное устройство для осуществления способа по одному из предыдущих пунктов, содержащее по меньшей мере один узел (12) управления и/или регулирования, предусмотренный по меньшей мере для того, чтобы выполнять распознавание посторонних объектов в зависимости от по меньшей мере одного параметра передачи мощности.
8. Индукционное зарядное устройство по п. 7, отличающееся тем, что узел (12) управления и/или регулирования предусмотрен по меньшей мере для того, чтобы в зависимости от по меньшей мере одного параметра передачи мощности определять по меньшей мере один параметр точности распознавания посторонних объектов.
9. Индукционное зарядное устройство по п. 7 или 8, отличающееся тем, что узел (12) управления и/или регулирования предусмотрен по меньшей мере для того, чтобы в зависимости от по меньшей мере одного параметра передачи мощности определять по меньшей мере одну частотность выполнения распознавания посторонних объектов.
| US 2012077537 A1, 29.03.2012 | |||
| WO 2015007696 A1, 22.01.2015 | |||
| ВЫЧИСЛЕНИЕ ПОТЕРЬ МОЩНОСТИ ДЛЯ ИНДУКТИВНОЙ ПЕРЕДАЧИ МОЩНОСТИ | 2012 |
|
RU2584820C2 |
| WO 2015158539 A1, 22.10.2015 | |||
| DE 102012112953 A1, 26.06.2014. | |||

