Область техники, к которой относится изобретение
Настоящее изобретение относится к части комплекса измерений во время бурения (LWD) или каротажа в процессе бурения (MWD), а именно к оборудованию, предназначенному для оперативного контроля проводки наклонно-направленных и горизонтальных участков скважины, навигации наклонно-направленного бурения, а также исследования геофизических параметров скважин непосредственно в процессе бурения.
Уровень техники
Известно устройство наддолотного модуля (НДМ), предложенное в патенте US6057784A, 02.05.2000. В патенте, в качестве одного из вариантов, описан НДМ, который содержит измерительные датчики, датчики ориентации и датчики технологических параметров, а также устройство телеметрии, которое передает данные, полученные с датчиков в управляющий модуль, расположенный дальше от долота вдоль бурильной колонны. В предпочтительной реализации НДМ и управляющий модуль разделены винтовым забойным двигателем (ВЗД). Управляющий модуль также содержит устройство телеметрии и соединен с LWD или MWD системой, которая обеспечивает передачу полученных данных на поверхность. Устройство телеметрии представляет из себя приемо-передающую тороидальную катушку, одетую на корпус, который, по существу, представляет из себя буровую трубу с технологическими выемками, предназначенными для размещения приемо-передающей катушки, измерительных датчиков, элементов питания и управляющей электроники. Тороидальная катушка состоит из кольцевого сердечника, выполненного из материала с высокой магнитной проницаемостью и проводника, намотанного вокруг сердечника. При работе первого устройства телеметрии в качестве передатчика, переменное электрическое напряжение, приложенное к катушке, создает в сердечнике вихревое магнитное поле, которое, в свою очередь, создает вихревое электрическое поле, силовые линии которого частично замыкаются по части бурильной колонны и тем самым вызывают протекание электрического тока вдоль бурильной колонны. При этом, часть тока протекает под катушкой второго устройства телеметрии и создает вихревое магнитное поле в сердечнике, что приводит к возникновению на катушке электрического напряжения. Таким образом обеспечивается передача данных с НДМ в управляющий модуль и обратно. В данном решении описан НДМ с возможностью автоматического выбора частоты на которой работает телеметрия, для улучшения отношения сигнал/шум. Способ кодирования и декодирования данных, используемый в телеметрии, в данном решении не рассмотрен.
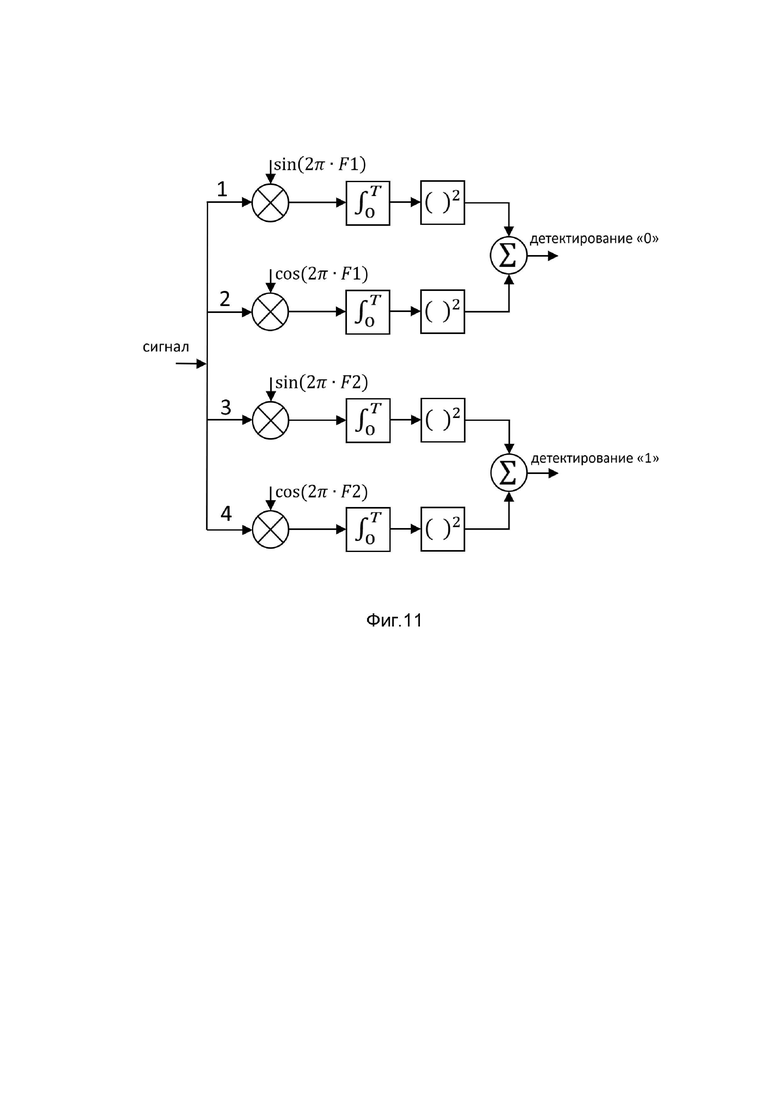
Известны устройства и методы передачи цифровой информации с помощь частотной манипуляции, когда логический ноль кодируется установкой частоты передающего сигнала к первому значению F1, а логическая единица кодируется установкой частоты передающего сигнала к второму значению F2. Известен метод декодирования сигнала с частотной манипуляцией, заключающийся вычислении коэффициентов ряда Фурье, соответствующих частотам модуляции F1 и F2. Каналы 1 и 2 соответствуют вычислению синусного и косинусного коэффициента на частоте F1, а их сумма квадратов обеспечивает детектирование логического нуля, Каналы 3 и 4 соответствуют вычислению синусного и косинусного коэффициента на частоте F2, а их сумма квадратов обеспечивает детектирование логической единицы. Учитывая то, что в НДМ
1) частоты модуляции F1 и F2 могут принимать значения примерно от 1 кГц, до 1 МГц и
2) ограниченный внутренний объемом модуля, отведенным под электронику, и
3) ограниченный запас электроэнергии, доступный для питания модуля,
применение этого метода является затруднительным поскольку требует проведения большого количества вычислений за короткое время, меньшее чем период опроса АЦП, который в свою очередь, должен быть минимум в 2 раза меньше, чем периоды модулированного сигнала. Поэтому используются методы декодирования описанные, например, в патентах US4193034A, 11.03.1980 и US4571738A, 18.02.1986, в которых демодуляция осуществляется путем переноса средней частоты передачи сигнала к нулевому значению. В результате на вход логической схемы демодуляции поступает сигнал с частотой (F2-F1)/2 и разной начальной фазой в случае передачи логического ноля и логической единицы, что используется для демодуляции сигнала.
Недостатком таких устройств и методов с переносом частоты является уменьшение надежности и скорости передачи информации, поскольку время передачи бита информации обратно пропорционально частоте на которой производится обработка сигнала.
Заявленное изобретение устраняет указанные недостатки и позволяет достичь заявленный технический результат.
Раскрытие изобретения
Технической задачей, которую решает предлагаемое решение, является создание устройство скважинной телеметрии бурового комплекса с быстрой целочисленной обработкой сигнала без понижения частоты, обладающего повышенной надежностью и скоростью передачи данных, низким потреблением энергии и увеличенной максимальной длительностью работы.
Технический результат заключается в повышении надежности и скорости передачи данных, обеспечении быстрой целочисленной обработки сигнала без понижения частоты, снижении потребления энергии и увеличении максимальной длительности работы устройства.
Для решения поставленной задачи с достижением заявленного технического результата устройство скважинной телеметрии бурового комплекса содержит расположенные вдоль бурильной колонны и взаимосвязанные между собой долото, наддолотный модуль, забойный двигатель и управляющий модуль, причем наддолотный модуль содержит измерительные датчики, датчики ориентации и датчики технологических параметров, а также устройство телеметрии, которое передает данные, полученные с указанных датчиков в управляющий модуль, при этом управляющий модуль также содержит устройство телеметрии и соединен с телесистемой, обеспечивающей передачу полученных данных на поверхность, причем наддолотный модуль и управляющий модуль выполнены с возможностью передачи данных между собой посредством частотной модуляции с кодированием логических нуля и единицы частотами F1 и F2, причем частоты F1 и F2 выбраны таким образом, что периоды сигнала равные Т1=1/F1 при передаче нуля и Т2=1/F2 при передаче единицы кратны периоду опроса АЦП - Та, а длительность передачи бита информации прямо пропорциональна периодам Т1 и Т2 и обратно пропорциональна периоду опроса АЦП и наибольшему общему делителю значений Т1/Та и Т2/Та, при этом демодуляция выполнена с возможностью осуществления в режиме реального времени, посредством целочисленного алгоритма.
Демодуляция выполнена с возможностью осуществления в режиме реального времени и выполнена посредством целочисленного алгоритма приближенного вычисления коэффициентов ряда Фурье на частотах F1 и F2, вычисления и сравнения, с заданными пороговыми значениями, энергии, передаваемой на частотах F1 и F2, в принятом сигнале.
Краткое описание чертежей
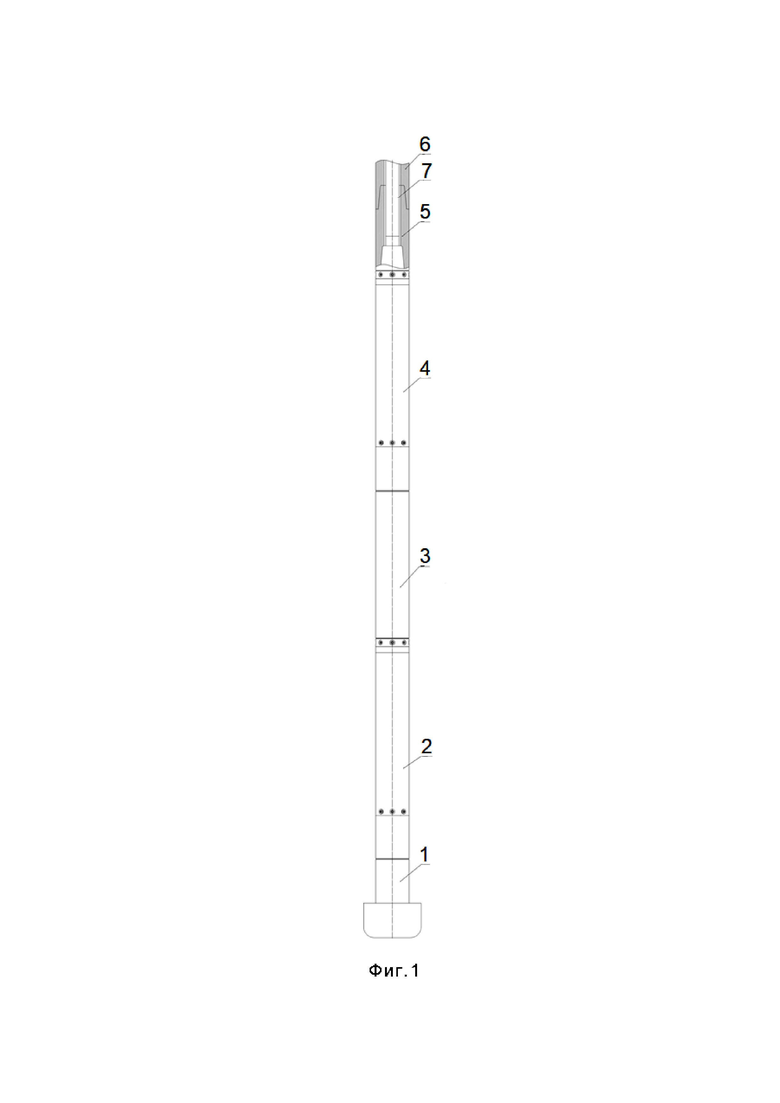
Фиг. 1 - Компоновка прибора в составе комплекса каротажа в процессе бурения;
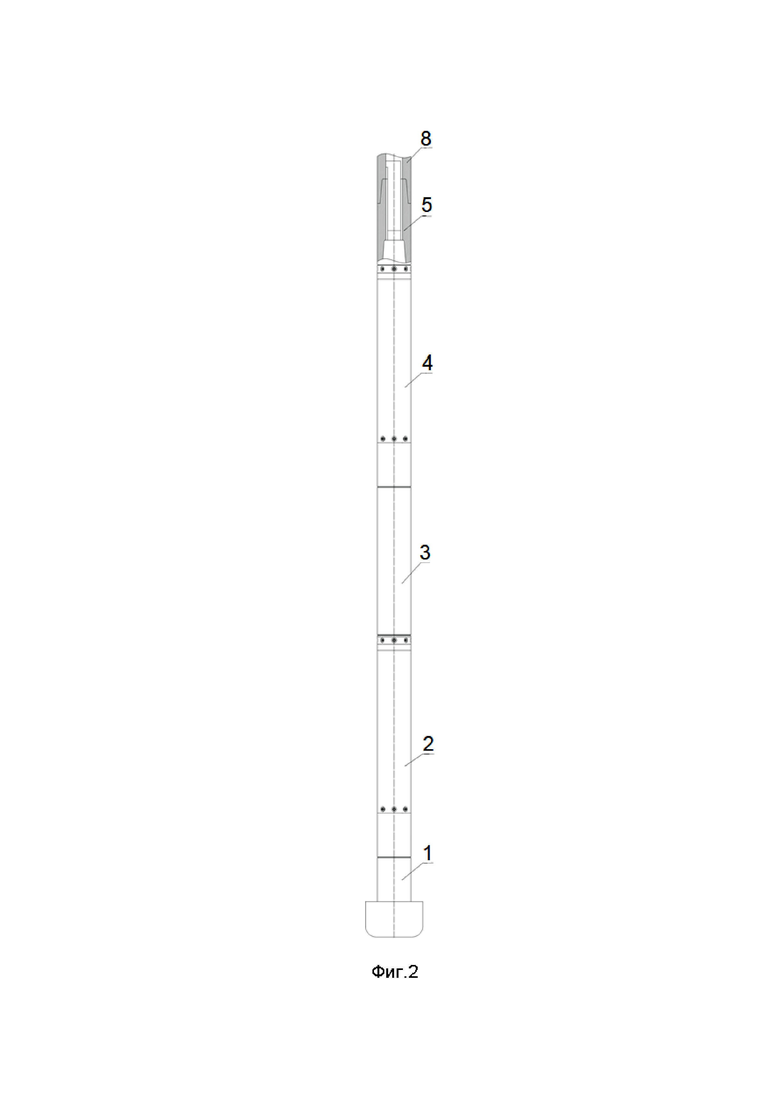
Фиг. 2 - Компоновка прибора в составе комплекса каротажа в процессе бурения;
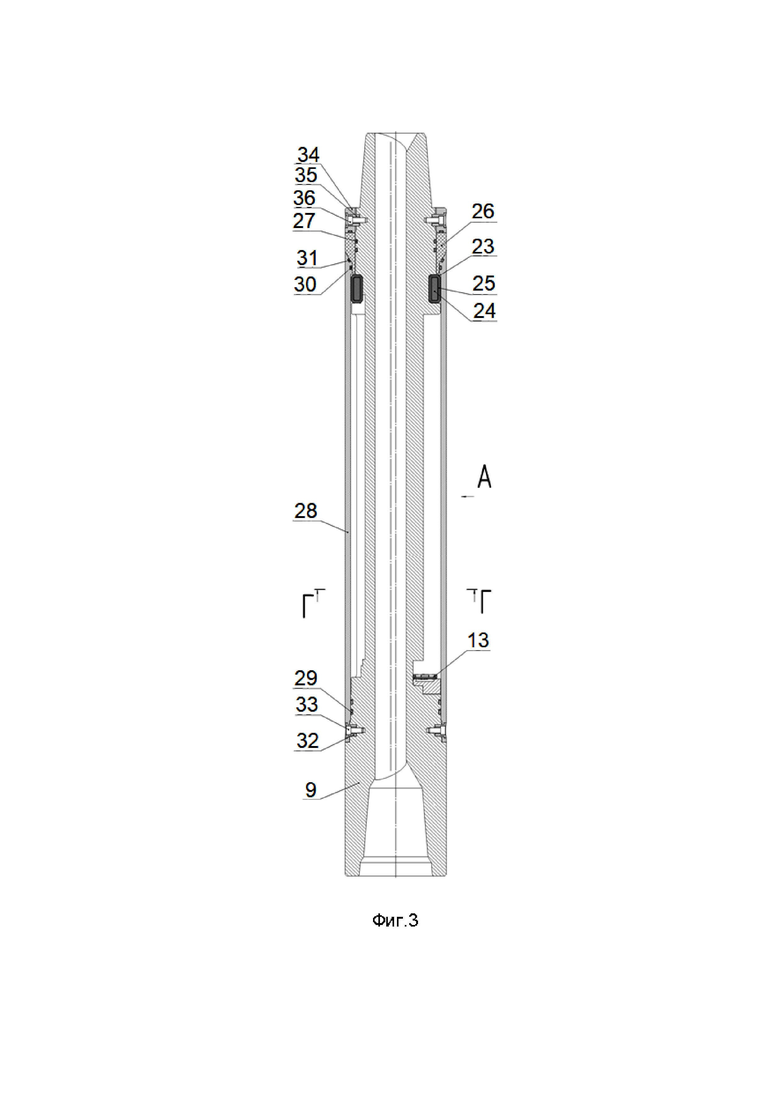
Фиг. 3 - Продольный разрез НДМ, согласно изобретению;
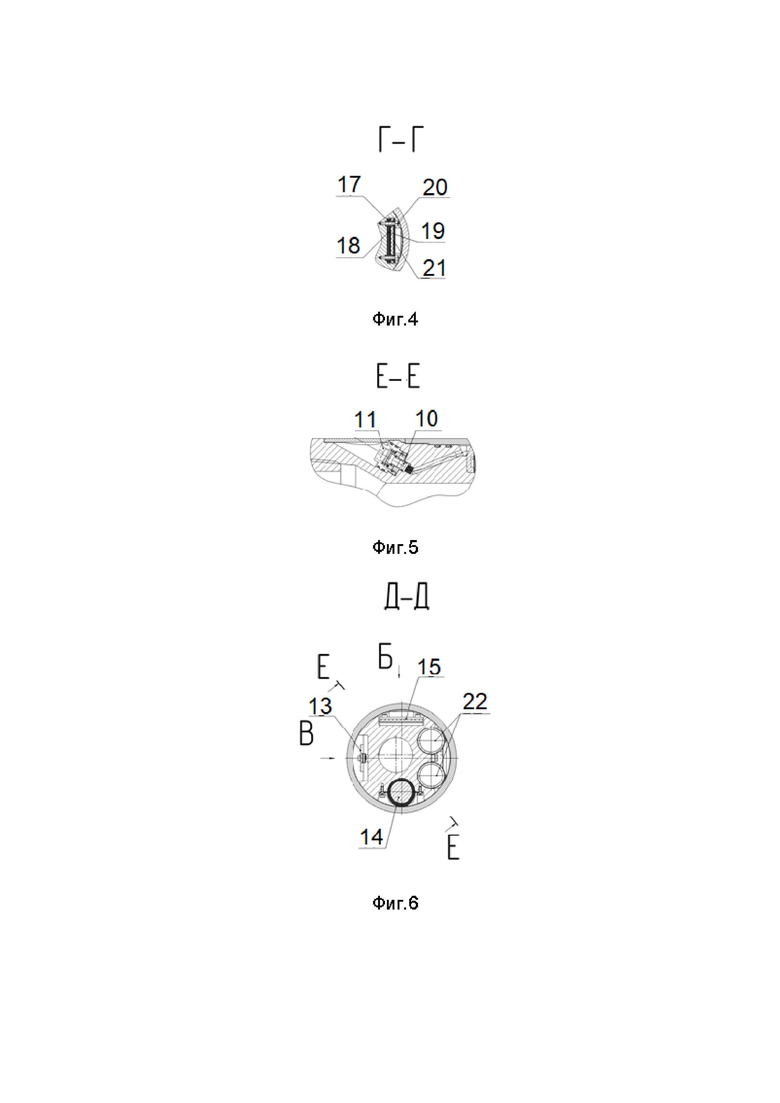
Фиг. 4 - Втулки, фиксирующие датчики НДМ, с изолятором и амортизатором, сечение Г-Г;
Фиг. 5 - Боковой разъем НДМ с заглушкой, сечение Е-Е;
Фиг. 6 - Датчики НДМ, с электрической платой и батареями, сечение Д-Д;
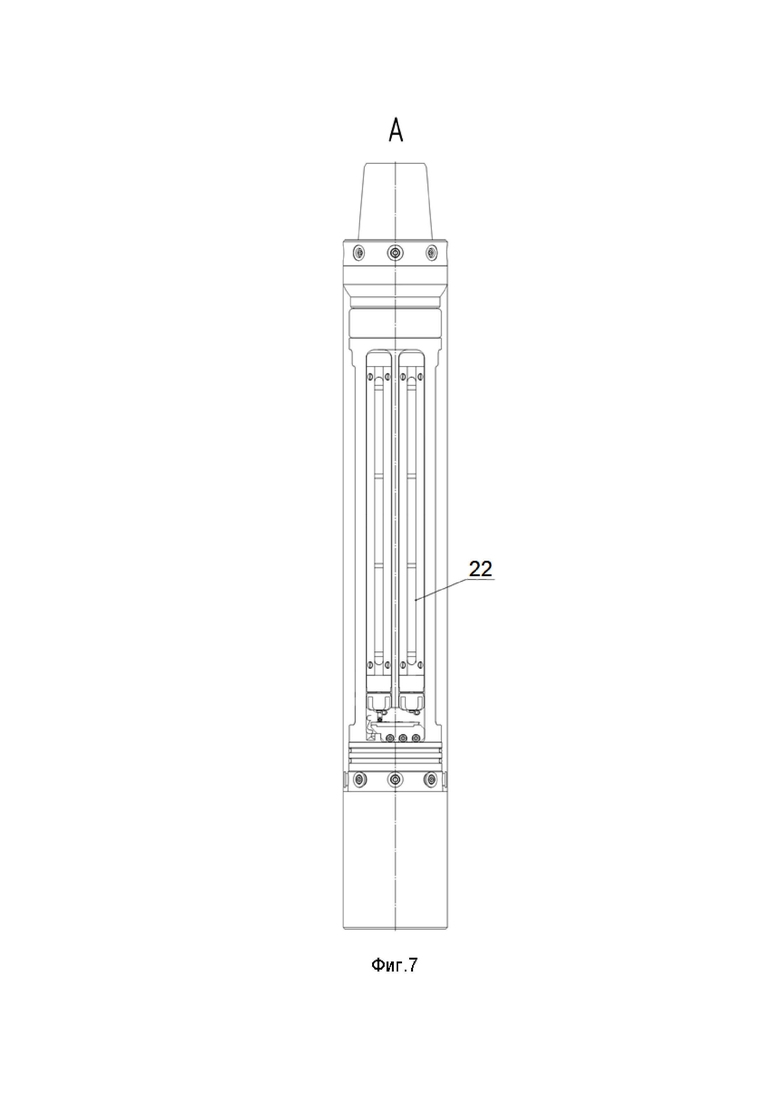
Фиг. 7 - Продольный разрез НДМ, с изображением батарей;
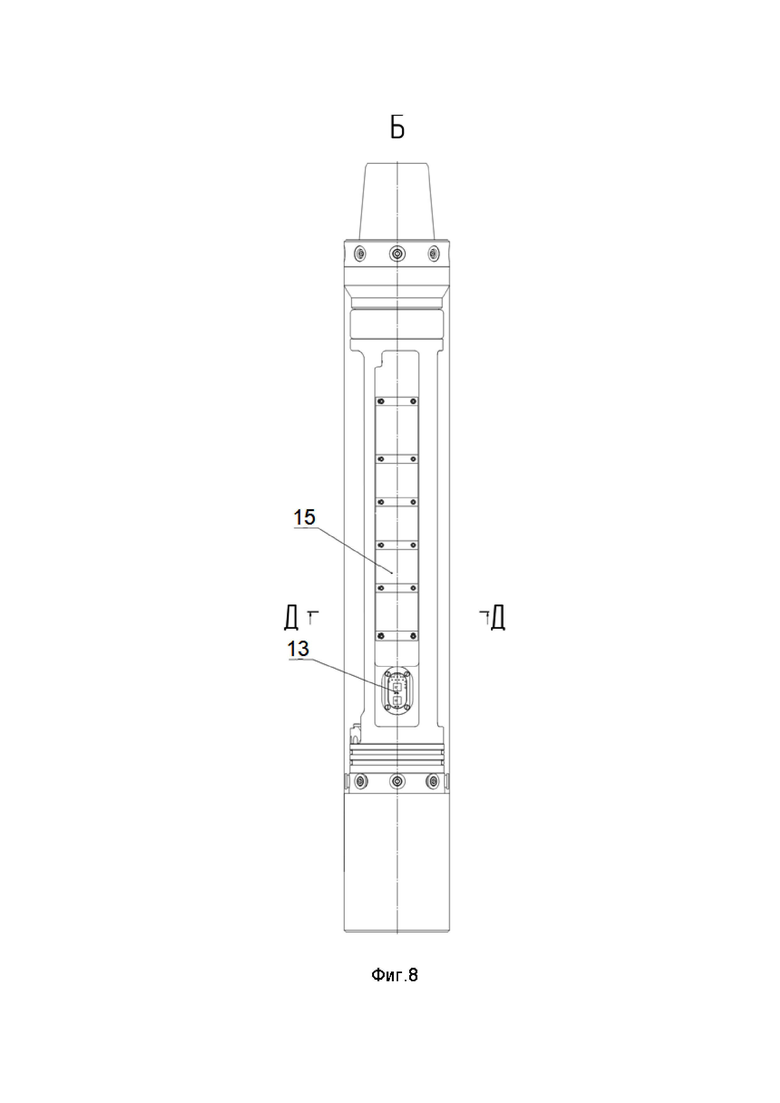
Фиг. 8 - Продольный разрез НДМ, с изображением датчика измерения зенитного угла и электрической платы;
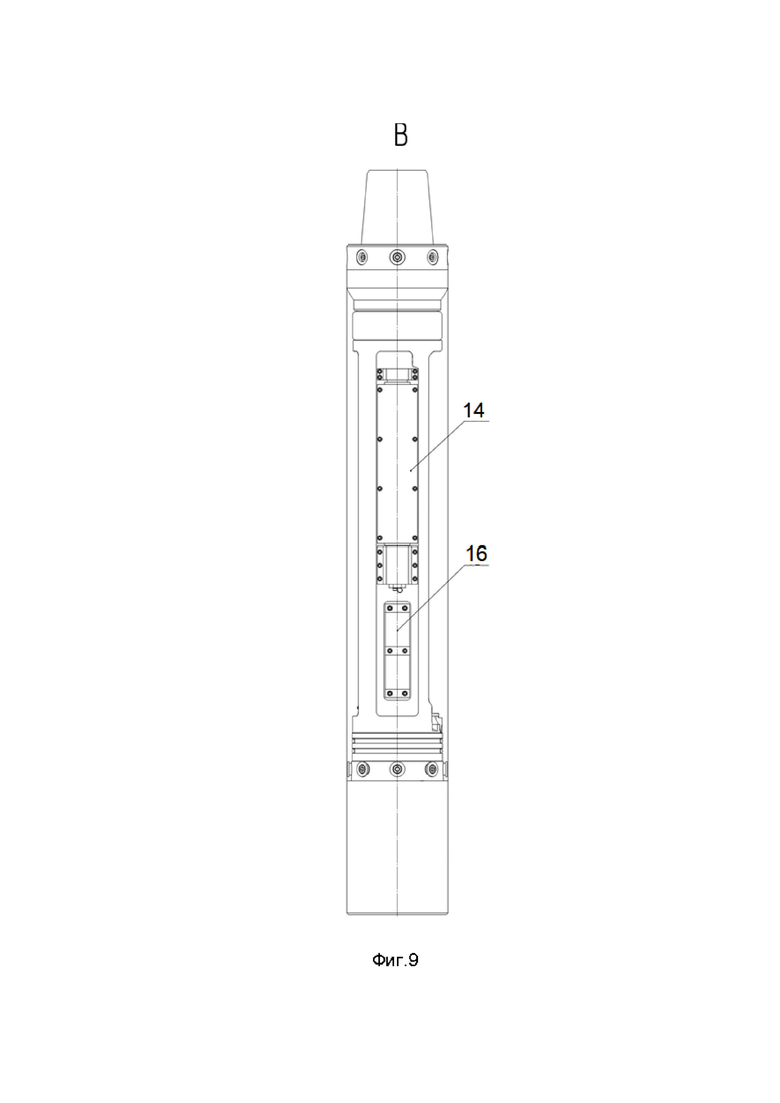
Фиг. 9 - Продольный разрез НДМ, с изображением датчика естественной гамма активности породы и электронной платы;
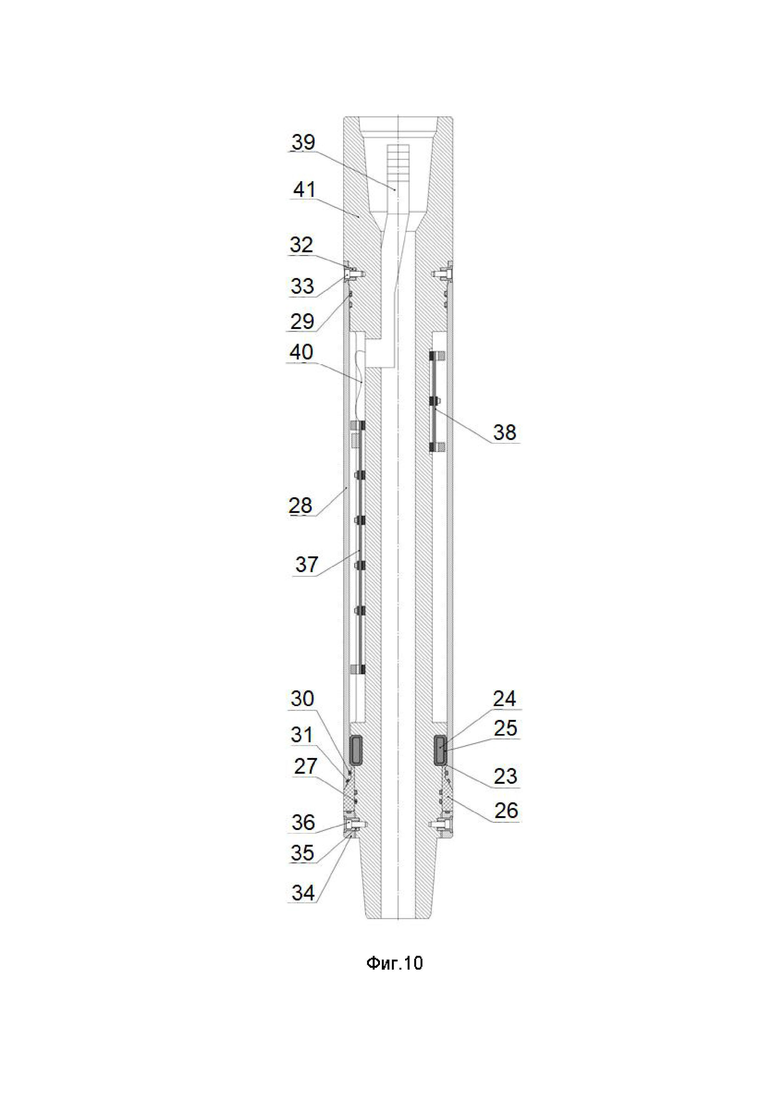
Фиг. 10 - Продольный разрез управляющего модуля, согласно изобретению;
Фиг. 11 - Общая диаграмма работы алгоритма демодуляции.
Осуществление изобретения
Устройство скважинной телеметрии бурового комплекса включает наддолотный модуль (НДМ) и управляющий модуль, которые эксплуатируются в составе бурильной колонны при бурении наклонно-направленных и горизонтальных скважин. НДМ содержит измерительные датчики, датчики ориентации, датчики технологических параметров и устройство телеметрии, а также управляющий модуль с устройством телеметрии и разъемом для подключения к MWD или LWD телесистеме. НДМ и управляющий модуль, по существу, представляют из себя буровую трубу с технологическими выемками, предназначенными для размещения устройства телеметрии, измерительных датчиков, элементов питания и управляющей электроники. Устройство телеметрии представляет из себя приемо-передающую тороидальную катушку, одетую на корпус, которая состоит из кольцевого сердечника, выполненного из материала с высокой магнитной проницаемостью и проводника, намотанного вокруг сердечника.
Наддолотный модуль (НДМ) является частью комплекса измерений во время бурения (LWD) или каротажа в процессе бурения (MWD), предназначенного для оперативного контроля проводки наклонно-направленных и горизонтальных участков скважины, навигации наклонно-направленного бурения, а также исследования геофизических параметров скважин непосредственно в процессе бурения и предназначен для:
- повышения оперативности и точности полученных данных о направлении бурения и о свойствах окружающих пород, за счет проведения измерений в непосредственной близости от долота;
- повышения качества бурения за счет возможности контроля технологических параметров бурения.
В предпочтительной реализации, НДМ установлен сразу за долотом, затем установлен винтовой забойный двигатель (ВЗД), после которого следует управляющий модуль, подключенный к LWD или MWD телесистеме.
Компоновка прибора в составе бурильной колонны с телесистемой LWD или MWD, показана на фигурах 1 и 2. Модуль НДМ 2 в предпочтительном варианте стыкуется к долоту 1, затем следует винтовой забойный двигатель (ВЗД) 3 и модуль управления 4. Модуль управления стыкуется либо через переходник 5 непосредственно с нижним внутренним модулем телесистемы 7, либо через переходник 5 с нижним внешним модулем телесистемы 8.
На фиг. 3 - фиг. 9 показана одна из возможных реализаций НДМ. Модуль состоит из корпуса 9, в который установлен боковой разъем 10 (фиг. 5) для считывания информации, который закрыт в процессе работы герметичной заглушкой 11, датчики измерения зенитного угла 13 (фиг. 3, 6, 8), установленные в модуле, и датчик естественной гамма активности породы 14 (фиг. 6, 9), данные с которых принимают и обрабатывают электрические платы 15 и 16 (фиг. 6, 8, 9), которые фиксируются втулками 17 (фиг. 4), устанавливаются на изолятор 18 и амортизатор 19 и прижимаются винтами 20 через прижим 21, питаются от одной или более батареей 22 (фиг. 6, 7).
Передача данных происходит с помощью устройства телеметрии, которое представляет из себя тороидальную катушку 23 вместе с электроникой управления. Тороидальная катушка состоит из тороидального сердечника 24, выполненного из материала с высоким значением магнитной проницаемости и намотанного на сердечник проводника 25. На корпус 9 установлено кольцо 26, изготовленное из подходящего диэлектрического материала, которое герметизируется уплотнительными кольцами 27. Для механической защиты и защиты от внешнего давления бурового раствора компонентов модуля, поверх корпуса 9 устанавливается кожух 28, который герметизируется при помощи уплотнительных колец 29, 30 и 31, и фиксируется от проворота втулками 32 при помощи винтов 33 и в осевом направлении гайкой 34, аналогично фиксируется от проворота втулками 35 и винтами 36.
На фиг. 10 показан продольный разрез управляющего модуля согласно изобретению. Модуль состоит из корпуса 41, в который установлены платы управления модулем и обработки данных 37 и 38, которые фиксируются втулками 17 (фиг. 4), устанавливаются на изолятор 18 и амортизатор 19 и прижимаются винтами 20 через прижим 21. Тороидальная катушка устройства телеметрии 23 и диэлектрическое кольцо 26, полностью повторяют устройство телеметрии НДМ. Кожух управляющего модуля 28 аналогичен кожуху НДМ. Подключение к телесистеме происходит через центральный контакт 39, провода 40, от которого идут к электрическим платам 37 и 38, и который фиксируется на корпусе 41.
Диэлектрические кольца 26 фиг. 3, 10 обеспечивают, топологически, наружное расположение тороидальной катушки, такое, что металлический корпус 9 или 41 вместе с кожухом 28 и проводящей средой, в которой находится модуль в процессе бурения, образуют вокруг сечения тороидальной катушки, замкнутый электрический контур.
При работе одного из устройств телеметрии в качестве передатчика, переменное электрическое напряжение, приложенное к катушке, создает в сердечнике вихревое магнитное поле, которое, в свою очередь, создает вихревое электрическое поле, силовые линии которого частично замыкаются по части бурильной колонны и тем самым вызывают протекание электрического тока вдоль бурильной колонны. При этом часть тока протекает по корпусу через катушку второго устройства телеметрии и создает вихревое магнитное поле в сердечнике, что приводит к возникновению на катушке электрического напряжения. Таким образом обеспечивается передача данных с НДМ в управляющий модуль и обратно.
Сигнал с тороидальной катушки, после аналоговой фильтрации и усиления, поступает на вход АЦП и затем подвергается цифровой обработке с использованием контроллера или программируемой логической интегральной схемы (ПЛИС).
Для надежной и быстрой передачи информации между наддолотным модулем и управляющим модулем используется частотная модуляция с кодированием логического нуля и единицы частотами F1 и F2, соответственно. Демодуляция осуществляется в режиме реального времени, без понижения частоты сигнала. Что означает что алгоритм демодуляции должен выполняться за времена порядка периода опроса АЦП - Та, который в свою очередь, следуя теореме Котельникова, должен быть минимум в два раза меньше, чем периоды передачи нуля Т1=1/F1 и единицы Т2=1/F2.
Для обеспечения высокой скорости выполнения алгоритма демодуляции он должен содержать только целочисленные операции сложения умножения и децимации. Для этого частоты F1 и F2 выбираются таким образом, чтобы периоды сигнала при передаче нуля и единицы были кратны периоду опроса АЦП. То есть отношения Т1/Та=n1 и Т2/Та=n2 должны быть целыми. Длительность передачи бита должна быть равна Tb=k⋅T1⋅Т2/(Ta⋅D), где D - наибольший общий делитель (НОД) n1 и n2, k≥1 - произвольный целый множитель.
Учитывая описанные выше условия, для скорости передачи информации получим Fb=1/Tb=Fa⋅D/(k⋅n1⋅n2), где Fa=1/Та - частота опроса АЦП. Для получения максимальной скорости передачи информации при заданной Fa, к должно быть равно 1, а n1 и n2 должны быть небольшими числами с НОД равным 1. Однако для последующей целочисленной обработки удобней использовать n1 и n2 с НОД равным 2. Например это могут быть следующие пары чисел: 6 и 8; 8 и 10; 10 и 12; и так далее. Максимальной скорости передачи информации можно достичь при использовании пар 2 и 4 или 4 и 6, однако при выборе этих значений частоты F1 и F2 отличаются в 2 и 1,5 раза, соответственно, что приводит к существенно разной амплитуде сигнала на АЦП при передаче 0 или 1. Это затрудняет декодирование сигнала и поэтому пары 2 и 4 или 4 и 6 не желательны для использования. С другой стороны, уже при выборе пары 10 и 12 скорость передачи данных в 2,5 раз меньше, чем при выборе пары 6 и 8, поэтому пары со большими значениями n1 и n2 тоже не желательны, но и при таких значениях скорость передачи информации, по сравнению с аналогами, остается высокой.
Алгоритм демодуляции заключается в вычислении коэффициентов ряда Фурье, соответствующих частотам модуляции F1 и F2. Общая диаграмма работы такого алгоритма приведена на фиг. 11. Каналы 1 и 2 соответствуют вычислению синусного и косинусного коэффициента на частоте F1, а их сумма квадратов пропорциональна энергии, передаваемой на частоте F1, и обеспечивает детектирование логического нуля. Каналы 3 и 4 соответствуют вычислению синусного и косинусного коэффициента на частоте F2, а их сумма квадратов пропорциональна энергии, передаваемой на частоте F2, и обеспечивает детектирование логической единицы. Для обеспечения быстродействия алгоритма применяется целочисленный приближенный алгоритм вычисления коэффициентов ряда Фурье и детектирования логических 0 и 1, который получается следующим образом:
1) Интегралы приближенно заменяются суммами с шагом по времени равным периоду опроса АЦП:
 ,
,
где Sj - последнее измерение сигнала на АЦП. Аналогично приближаются интегралы с косинусом и интегралы для частоты F2.
2) Функции синуса и косинуса заменяются приближенными целочисленными аналогами. В предпочтительном варианте синус и косинус заменяются меандром, следующим образом:
 ,
,
где ƒs(x) - целочисленная замена синуса. Замена для косинуса ƒc(x) получается аналогично. Функции синуса и косинуса могут быть заменены не меандром, а например путем округления к ближайшему целому:
 ,
,
где round{x) - обозначает функцию округления к ближайшему целому.
3) Для выбранных k, n1, n2, D и целочисленных fs(x) b fc(x), строятся рекуррентные формулы для вычисления сумм, основанные на том, что при измерении нового значения на АЦП Sj, значительная часть измерений Sj-i входят в новую сумму, с тем же множителем, что и в сумму, полученную при прошлом измерении, поэтому можно не вычислять новую сумму полностью, а получить новое значение из старого учитывая только измерения множитель, при которых изменился. Кроме того, при получении рекуррентных формул, используется то, что косинус и его целочисленный аналог может быть получен из синуса или целочисленного аналога сдвигом на четверть периода. Что позволяет проводить рекуррентные вычисления для одной суммы, а не отдельно для синуса и для косинуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА С НАДДОЛОТНЫМ МОДУЛЕМ И СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЕЕ ДАННЫХ НА ЗЕМНУЮ ПОВЕРХНОСТЬ | 2013 |
|
RU2549622C2 |
| ЭЛЕКТРИЧЕСКИЙ РАЗДЕЛИТЕЛЬ-РЕТРАНСЛЯТОР СИГНАЛОВ | 2014 |
|
RU2580563C1 |
| СИСТЕМА ДВУСТОРОННЕЙ ТЕЛЕМЕТРИИ ПО БУРИЛЬНОЙ КОЛОННЕ ДЛЯ ИЗМЕРЕНИЙ И УПРАВЛЕНИЯ БУРЕНИЕМ | 2006 |
|
RU2413841C2 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕИСПРАВНОСТИ В КАБЕЛЬНОЙ БУРИЛЬНОЙ ТРУБЕ | 2007 |
|
RU2436109C2 |
| Система электрической беспроводной связи между забойной телеметрической системой и дополнительным измерительным модулем | 2017 |
|
RU2661971C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2509210C1 |
| Ретранслятор скважинной электромагнитной телеметрии | 2021 |
|
RU2778079C1 |
| ЗАБОЙНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА С ГИДРАВЛИЧЕСКИМ КАНАЛОМ СВЯЗИ | 2004 |
|
RU2256794C1 |
| НАЗЕМНОЕ УСТРОЙСТВО И СПОСОБ СВЯЗИ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТЕЛЕМЕТРИИ ПО БУРИЛЬНОЙ КОЛОННЕ | 2006 |
|
RU2401931C2 |
| НАДДОЛОТНЫЙ МОДУЛЬ (ВАРИАНТЫ) | 2016 |
|
RU2633884C2 |
Изобретение относится к части комплекса измерений во время бурения (LWD) или каротажа в процессе бурения (MWD), а именно к оборудованию, предназначенному для оперативного контроля проводки наклонно-направленных и горизонтальных участков скважины, навигации наклонно-направленного бурения, а также исследования геофизических параметров скважин непосредственно в процессе бурения. Устройство скважинной телеметрии бурового комплекса содержит расположенные вдоль бурильной колонны и взаимосвязанные между собой долото, наддолотный модуль, забойный двигатель и управляющий модуль, причем наддолотный модуль содержит измерительные датчики, датчики ориентации и датчики технологических параметров, а также устройство телеметрии, которое передает данные, полученные с указанных датчиков в управляющий модуль, при этом управляющий модуль также содержит устройство телеметрии и соединен с телесистемой, обеспечивающей передачу полученных данных на поверхность. Наддолотный модуль и управляющий модуль выполнены с возможностью передачи данных между собой посредством частотной модуляции с кодированием логических нуля и единицы частотами F1 и F2. Частоты F1 и F2 выбраны таким образом, что периоды сигнала Т1=1/F1 при передаче нуля и Т2=1/F2 при передаче единицы кратны периоду опроса аналого-цифрового преобразователя (АЦП) - Та, а длительность передачи бита информации прямо пропорциональна периодам Т1 и Т2 и обратно пропорциональна периоду опроса АЦП и наибольшему общему делителю значений Т1/Та и Т2/Та, при этом демодуляция выполнена с возможностью осуществления в режиме реального времени посредством целочисленного алгоритма. Технический результат заключается в повышении надежности и скорости передачи данных, снижении потребления энергии и увеличении максимальной длительности работы устройства. 1 з.п. ф-лы, 11 ил.
1. Устройство скважинной телеметрии бурового комплекса, содержащее расположенные вдоль бурильной колонны и взаимосвязанные между собой долото, наддолотный модуль, забойный двигатель и управляющий модуль, причем наддолотный модуль содержит измерительные датчики, датчики ориентации и датчики технологических параметров, а также устройство телеметрии, которое передает данные, полученные с указанных датчиков в управляющий модуль, при этом управляющий модуль также содержит устройство телеметрии и соединен с телесистемой, обеспечивающей передачу полученных данных на поверхность, отличающееся тем, что наддолотный модуль и управляющий модуль выполнены с возможностью передачи данных между собой посредством частотной модуляции с кодированием логических нуля и единицы частотами F1 и F2, причем частоты F1 и F2 выбраны таким образом, что периоды сигнала Т1=1/F1 при передаче нуля и Т2=1/F2 при передаче единицы кратны периоду опроса АЦП - Та, а длительность передачи бита информации прямо пропорциональна периодам Т1 и Т2 и обратно пропорциональна периоду опроса АЦП и наибольшему общему делителю значений Т1/Та и Т2/Та, при этом демодуляция выполнена с возможностью осуществления в режиме реального времени, посредством целочисленного алгоритма.
2. Устройство по п. 1, отличающееся тем, что демодуляция выполнена с возможностью осуществления в режиме реального времени и выполнена посредством целочисленного алгоритма приближенного вычисления коэффициентов ряда Фурье на частотах F1 и F2, вычисления и сравнения, с заданными пороговыми значениями, энергии, передаваемой на частотах F1 и F2, в принятом сигнале.
| СКВАЖИННЫЙ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2009 |
|
RU2425213C1 |
| УСОВЕРШЕНСТВОВАННАЯ СИСТЕМА СВЯЗИ БУРИЛЬНОЙ КОЛОННЫ, КОМПОНЕНТЫ И СПОСОБЫ | 2013 |
|
RU2605105C2 |
| US 6057784 A1, 02.05.2000 | |||
| FR 2899931 A1, 19.10.2007. | |||

