ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству для управления электрохирургическим инструментом, которое выполнено с возможностью подачи радиочастотной (РЧ) энергии и/или энергии микроволновой частоты в биологическую ткань. В частности, данное изобретение относится к управляющему или исполнительному механизму для вращения дистального наконечника электрохирургического инструмента. Исполнительный механизм может обеспечивать дистанционное управление ориентацией инструмента относительно места обработки.
УРОВЕНЬ ТЕХНИКИ
Электрохирургические инструменты представляют собой инструменты, которые используются для подачи радиочастотной энергии и/или энергии микроволновой частоты в биологические ткани, например, для разрезания биологической ткани или свертывания крови. Радиочастотная энергия и/или энергия микроволновой частоты подается на электрохирургический инструмент с помощью линии передачи, такой как коаксиальный кабель, волновод, микрополосовая линия или тому подобное.
Известно использование коаксиальных кабелей для подачи микроволновой и/или радиочастотной энергии по инструментальному каналу хирургического устройства для осмотра в электрохирургический инструмент на дистальном конце этого канала. Такие коаксиальные питающие кабели обычно содержат сплошной или гибкий цилиндрический внутренний проводник, трубчатый слой диэлектрического материала вокруг внутреннего проводника и трубчатый внешний проводник вокруг диэлектрического материала. Диэлектрик и/или внешний проводник могут быть многослойными структурами.
Электрическое соединение преимущественно образуется между внутренним и внешним проводниками коаксиального питающего кабеля и соответствующими проводящими элементами наконечника инструмента путем припайки проводника, такого как часть провода или фольги, к внутреннему/внешнему проводнику и к соответствующему проводящему элементу. Таким образом, радиочастотная энергия и/или энергия микроволновой частоты могут передаваться от коаксиального питающего кабеля на наконечник инструмента для подачи в биологическую ткань.
Электрохирургические инструменты используют в сочетании с эндоскопами, например, для разрезания или удаления небольшой части ткани в желудочно-кишечном (ЖК) тракте. В этом контексте электрохирургический инструмент пропускается через инструментальный канал эндоскопа, так что наконечник инструмента выступает из дистального конца эндоскопа, где он может контактировать с ЖК трактом.
В некоторых случаях может быть желательно вращать наконечник инструмента, чтобы ориентировать наконечник инструмента определенным образом относительно места обработки. Вращение может быть выполнено путем поворота наконечника относительно остальной части инструмента, например, путем приложения подходящей вращающей силы к дистальному концу инструмента. В некоторых примерах этого можно добиться, обеспечив вращаемое соединение между наконечником инструмента и коаксиальным питающим кабелем, который поддерживает электрическое соединение между наконечником инструмента и коаксиальным питающим кабелем при вращении наконечника инструмента. В WO 2016/059228 раскрыт пример такого соединения. Может быть предусмотрен механический исполнительный механизм для регулировки вращения наконечника инструмента относительно коаксиального питающего кабеля.
Известны и другие механизмы вращения наконечника инструмента. В некоторых электрохирургических инструментах коаксиальный питающий кабель находится внутри гибкого стержня, и наконечник инструмента выступает из дистального конца гибкого стержня. Наконечник инструмента жестко соединен с гибким стержнем, так что, когда пользователь вращает гибкий стержень, наконечник инструмента тоже вращается. Это позволяет пользователю управлять вращением наконечника инструмента, вращая проксимальный конец гибкого стержня. Однако такой подход не обеспечивает надежного контроля над положением наконечника инструмента. В других примерах,
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В самом общем смысле изобретение предусматривает использование материала с эффектом запоминания формы (shape memory effect; SME) (например, сплав с запоминанием формы, такой как нитинол) в приводе для осуществления вращения электрохирургического инструмента и, в частности, для управления вращением наконечника инструмента на дистальном конце канала инструмента в хирургическом устройстве для осмотра. Например, привод может быть частью механизма управления для вращения наконечника электрохирургического инструмента относительно гибкого стержня, который заключает в оболочку компоненты инструмента, когда они доставляются по инструментальному каналу хирургического устройства для осмотра, например, эндоскопа, бронхоскопа, лапароскопа, гастроскопа или тому подобное.
Материал SME в приводе может быть выполнен так, что при изменении температуры его форма изменяется таким образом, что это приводит к вращению наконечника инструмента. Регулируя изменение температуры (например, путем подачи энергии в материал SME и/или отвода энергии из него), можно точно управлять относительным вращением наконечника инструмента.
Изменение температуры материала SME может быть вызвано подачей энергии, которая нагревает материал. Энергия может подаваться напрямую, например, за счет пропускания электрического тока через материал и его нагревания с помощью эффекта Джоуля. В качестве альтернативного варианта материал SME может быть нагрет с помощью нагревателя, который находится в тепловом контакте с материалом SME. Электрохирургическое устройство может быть выполнено с возможностью подачи через инструментальный канал хирургического устройства для осмотра (например, эндоскопа), так что его можно использовать для проведения минимально инвазивных хирургических процедур.
В электрохирургическом инструменте в соответствии с изобретением используется электрический ток, а не подвижные тросы управления для регулирования вращения наконечника инструмента. Это уменьшает количество движущихся частей в электрохирургическом инструменте, что может повысить надежность инструмента, а также точность, с которой может вращаться наконечник инструмента. В частности, авторы изобретения осознали, что может быть трудно добиться плавного и точного управления с помощью подвижного троса управления, поскольку трение между тросом управления и другими частями инструмента может вызвать его прерывистое, скачкообразное перемещение. Этот эффект может быть особенно выражен, когда в инструментальном канале хирургического устройства для осмотра имеется несколько изгибов (например, потому что хирургическое устройство для осмотра находится в ЖК тракте).
В соответствии с изобретением обеспечен механизм управления для вращения наконечника инструмента, расположенного на дистальном конце инструментального канала в хирургическом устройстве для осмотра, причем механизм управления содержит: привод, сформированный из материала с эффектом запоминания формы; и конструкцию передачи энергии, соединенную с приводом для подачи энергии, чтобы вызвать изменение температуры материала с эффектом запоминания формы, при этом привод выполнен с возможностью проявления крутящего момента между его проксимальным концом и дистальным концом в ответ на достижение материалом с эффектом запоминания формы пороговой температуры. Таким образом, в изобретении используется характеристика материала с эффектом запоминания формы для возврата к исходной форме, когда его температура превышает определенное пороговое значение. Привод сформирован таким образом, что возвращение к исходной форме включает вращательное или скручивающее движение, которое можно использовать для передачи крутящего момента между наконечником инструмента и его окружением.
Материал с эффектом запоминания формы представляет собой материал, который при деформации возвращается к своей исходной (то есть предварительно деформированной) форме, когда он нагревается выше температуры фазового перехода. Чтобы вызвать вращение наконечника инструмента при нагревании материала с эффектом запоминания формы, форма материала с эффектом запоминания формы может быть соответствующим образом подготовлена (например, путем его скручивания и термообработки) во время его изготовления перед установкой в электрохирургическом инструменте. Затем при нагреве привод деформируется (например, раскручивается) и вызывает вращение наконечника инструмента.
В некоторых случаях материал с эффектом запоминания формы может проявлять эффект двухстороннего запоминания формы. Материалы, обладающие эффектом двухстороннего запоминания формы, могут быть подготовлены таким образом, чтобы им можно было периодически циклически придавать обе заданные формы путем их термического циклического переформирования. Использование такого материала с эффектом двустороннего запоминания формы позволяет регулировать вращение наконечника инструмента в направлении как по часовой стрелке, так и против часовой стрелки, регулируя температуру материала. Подходящие материалы с эффектом запоминания формы включают, но не ограничиваются ими, сплавы с запоминанием формы (например, никель-титановые (NiTi) сплавы, сплавы SME на основе железа и на основе меди) и полимеры с эффектом запоминания формы. В некоторых предпочтительных вариантах реализации изобретения привод изготовлен из NiTi, который состоит из 45% Ti и 55% Ni. Преимущество NiTi состоит в том, что он может использоваться для создания больших сил и моментов, а также больших деформаций, когда нагревается выше температуры фазового перехода (температура фазового перехода NiTi составляет около 40°C).
В одном примере материал с эффектом запоминания формы может содержать спиральную структуру, которая может обеспечить эффективную физическую конфигурацию для приложения пригодного крутящего момента. Спиральная структура может быть намотанной проволокой или листом материала. Материал с эффектом запоминания формы может иметь исходную конфигурацию (выше пороговой температуры), которая намотана менее плотно, чем начальная конфигурация. Таким образом, материал с эффектом запоминания формы может быть выполнен с возможностью разматывания при достижении материалом с эффектом запоминания формы пороговой температуры. Пороговая температура может быть выбрана, чтобы избежать случайного вращения, например, вызванного теплом тела или теплом, возникающим в результате подачи энергии в место обработки, и т. д. Например, пороговая температура может быть равна или выше 40°C.
В одном примере материал с эффектом запоминания формы может содержать пару взаимодействующих спиральных структур. Эта структура может обеспечить больший крутящий момент, а также менее подвержена разрыву.
Механизм управления может содержать источник питания, соединенный с конструкцией подачи энергии. Любой подходящий тип энергии может быть использован для воздействия на температуру привода. Например, конструкция подачи энергии может содержать проводящий элемент (например, кабель) для прохождения электрического тока через привод. Конструкция подачи энергии может обеспечивать пару проводящих элементов, проходящих от каждого конца привода, чтобы обеспечить весь путь тока. Источником питания в этом примере может быть источник постоянного тока или тому подобное. Источник питания может быть управляемым, чтобы подавать требуемое количество энергии на привод. Источник питания может подавать энергию непрерывно или в импульсном режиме.
Механизм управления может содержать датчик температуры, предназначенный для определения температуры привода. Выходной сигнал от датчика температуры может использоваться в качестве обратной связи для управления работой источника питания.
В другом примере конструкция подачи энергии может содержать нагреватель, термически соединенный с приводом. Нагреватель может представлять собой резистивный нагреватель, например, подключенный к источнику постоянного тока.
Механизм управления может содержать конструкцию подачи охладителя, предназначенную для извлечения тепловой энергии из привода. Это может обеспечить более точное управление температурой привода, чтобы повысить точность положения наконечника инструмента. Конструкция подачи охладителя может содержать контур охладителя, находящийся в тепловом сообщении с приводом, например, через теплообменник или тому подобное. Конструкция подачи охладителя может работать избирательно, то есть обеспечивать возможность включения охлаждающего эффекта только при необходимости. В качестве альтернативного варианта, охлаждающий эффект может постоянно присутствовать, причем энергия для нагрева привода подается регулируемым образом для управления температурой материала с эффектом запоминания формы.
В другом аспекте изобретение предоставляет электрохирургический инструмент для приложения радиочастотной (РЧ) электромагнитной (ЭМ) энергии и/или микроволновой ЭМ энергии к биологической ткани, причем указанный инструмент содержит: коаксиальный кабель для передачи РЧ ЭМ энергии и/или микроволновой ЭМ энергии; наконечник инструмента, присоединенный на дистальном конце коаксиального кабеля, для приема РЧ ЭМ энергии и/или микроволновой ЭМ энергии и подачи ее в биологическую ткань в месте обработки; удлиненный стержень, образующий просвет для подвода коаксиального кабеля, при этом наконечник инструмента выступает из дистального конца гибкого стержня; и механизм управления, имеющий любую из указанных выше частей, при этом проксимальный конец привода прикреплен к стержню, а дистальный конец привода прикреплен к наконечнику инструмента.
Материал с эффектом запоминания формы может образовывать гильзу (например, спиральную гильзу) вокруг дистальной части стержня. Стержень может содержать полую трубку, выполненную из подходящего гибкого материала. Коаксиальный кабель вместе с любыми проводами и жидкостными каналами электрохирургического инструмента может содержаться внутри стержня и соединяться с наконечником инструмента на дистальном конце стержня. Стержень может быть вставлен через всю длину инструментального (или рабочего) канала хирургического устройства для осмотра, такого как эндоскоп, бронхоскоп, гастроскоп и т. д.
Коаксиальный кабель может содержать внутренний проводник, внешний проводник, соосный с внутренним проводником, и первый диэлектрический материал, разделяющий внутренний и внешний проводники. Кроме того, коаксиальный питающий кабель может содержать внешнюю защитную оболочку для защиты и изоляции внешнего проводника. В некоторых примерах внутренний проводник может быть образован из полой трубки, выполненной из проводящего материала, так что провода и/или жидкостные каналы могут проходить через внутренний проводник, например, для подачи жидкости на наконечник инструмента.
Наконечник инструмента может содержать один или более электродов, электрически соединенных с внутренним и внешним проводниками коаксиального питающего кабеля, так что по нему может подаваться РЧ ЭМ и/или микроволновая ЭМ энергия в биологическую ткань. Возможны многие различные конфигурации наконечника инструмента. Например, наконечник инструмента может содержать биполярную излучающую конструкцию, содержащую первый электрод, пространственно отделенный от второго электрода вторым диэлектрическим материалом. Первый и второй электроды могут быть выполнены с возможностью функционировать, соответственно, как активный и обратный электроды для передачи радиочастотной энергии или как антенна для излучения энергии микроволновых частот.
В некоторых вариантах реализации изобретения привод может быть прикреплен первым концом к гибкому стержню, а вторым концом к наконечнику инструмента. Таким образом, при нагреве привода наконечник инструмента может вращаться приводом относительно дистального конца гибкого стержня. Привод может быть прикреплен к гибкому стержню и наконечнику инструмента с помощью любых подходящих крепежных средств, таких как адгезивное средство, механические крепления и/или сварка.
В одном примере инструмент может содержать элементы зацепления в месте соединения между стержнем и проксимальным концом привода. Элементы зацепления могут быть выполнены с возможностью сопротивления относительному вращению между стержнем и приводом. Элементы зацепления могут, например, содержать взаимодействующие зацепляемые элементы на стержне и приводе.
Точно так же элементы зацепления (например, взаимодействующие зацепляемые элементы) могут находиться в месте соединения между наконечником инструмента и дистальным концом привода, причем они выполнены с возможностью сопротивления относительному вращению между наконечником инструмента и приводом.
Сам стержень может быть закреплен на проксимальном конце электрохирургического инструмента, чтобы предотвращать вращение гибкого стержня. Это обеспечивает передачу любого крутящего момента, создаваемого приводом при нагреве привода, на наконечник инструмента, а не на гибкий стержень, что могло бы привести к скручиванию гибкого стержня. Кроме того, стержень может быть изготовлен из материала, который противостоит скручивающим движениям, чтобы дополнительно обеспечить передачу любого крутящего момента, создаваемого приводом, на наконечник инструмента.
Коаксиальный кабель и любые другие конструкции, прикрепленные к наконечнику инструмента (например, жидкостные каналы, провода), могут вращаться внутри стержня инструмента при вращении наконечника инструмента. Это предотвращает накопление напряжения в области сопряжения между коаксиальным питающим кабелем и наконечником инструмента, что могло бы нарушить соединение между коаксиальным питающим кабелем и наконечником инструмента.
В другом аспекте изобретение обеспечивает электрохирургическую систему, содержащую: генератор для генерирования радиочастотной (РЧ) электромагнитной (ЭМ) энергии и/или микроволновой ЭМ энергии; электрохирургический инструмент, имеющий любой из указанных выше признаков и соединенный с генератором; и хирургическое устройство для осмотра, содержащее легко управляемый присоединительный шнур инструмента с проходящим через него инструментальным каналом, при этом размеры электрохирургического инструмента рассчитаны на его прохождение через инструментальный канал.
В данном документе термины «проксимальный» и «дистальный» относятся к концам конструкции (например, электрохирургического инструмента, коаксиального питающего кабеля и т. д.) соответственно дальше от зоны обработки и ближе к ней. Таким образом, при использовании проксимальный конец конструкции доступен пользователю, тогда как дистальный конец находится ближе к месту обработки, то есть пациенту.
Термин «проводящий» используется в данном документе для обозначения электропроводящего элемента, если контекст не требует иного.
Термин «продольный», используемый ниже, относится к направлению вдоль инструментального канала, параллельного оси коаксиальной линии передачи. Термин «поперечный» относится к направлению, которое перпендикулярно продольному направлению. Термин «внутренний» означает ближе в радиальном направлении к центру (например, оси) инструментального канала. Термин «внешний» означает находящийся в радиальном направлении дальше от центра (оси) инструментального канала.
Термин «электрохирургический» используется в отношении инструмента, аппарата и приспособления, которые используются во время операции и в которых применяется микроволновая электромагнитная (ЭМ) энергия и/или радиочастотная ЭМ энергия. В данном документе микроволновая ЭМ энергия может подразумевать электромагнитную энергию, имеющую стабильную фиксированную частоту в диапазоне от 300 МГц до 100 ГГц, предпочтительно в диапазоне от 1 ГГц до 60 ГГц. Предпочтительные фиксированные частоты для микроволновой ЭМ энергии составляют 915 МГц, 2,45 ГГц, 5,8 ГГц, 14,5 ГГц и 24 ГГц. Может быть предпочтительной частота 5,8 ГГц. В данном документе радиочастотная ЭМ энергия может означать электромагнитную энергию, имеющую стабильную фиксированную частоту в диапазоне от 10 кГц до 300 МГц.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Примеры реализации изобретения подробно обсуждаются ниже со ссылкой на прилагаемые графические материалы, в которых:
на фиг. 1 проиллюстрировано схематическое изображение электрохирургической системы, в которой может быть использовано данное изобретение;
на фиг. 2 проиллюстрировано схематическое изображение электрохирургического инструмента, который является вариантом реализации данного изобретения;
на фиг. 3 проиллюстрировано схематическое изображение привода, который может использоваться в электрохирургическом инструменте в соответствии с данным изобретением;
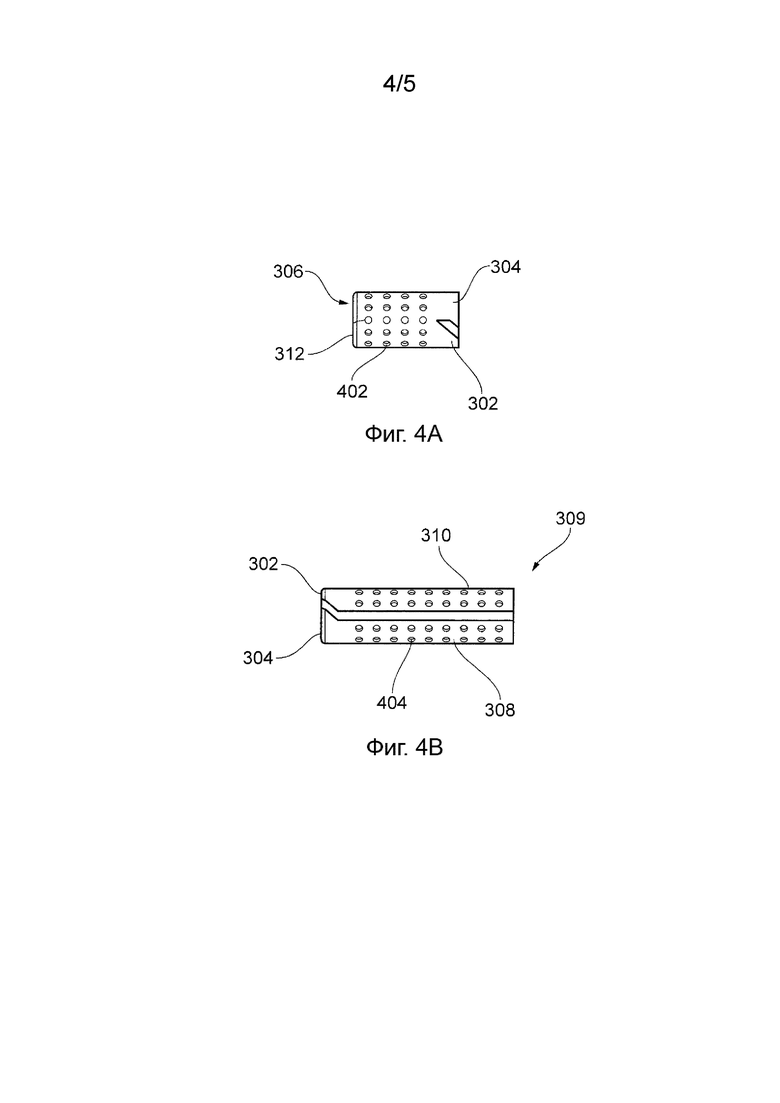
на фиг. 4А проиллюстрировано схематическое изображение дистального конца привода, проиллюстрированного на фиг. 3;
на фиг. 4В проиллюстрировано схематическое изображение проксимального конца привода, проиллюстрированного на фиг. 3; и
на фиг. 5 проиллюстрирован схематический вид в поперечном сечении гибкого стержня электрохирургического инструмента в соответствии с данным изобретением.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ; ДОПОЛНИТЕЛЬНЫЕ И ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ
На фиг. 1 проиллюстрировано схематическое изображение электрохирургической системы 100 в комплекте, которая является вариантом реализации данного изобретения. Данная система предназначена для обработки биологической ткани (например, опухоли, очага поражения или фибромы) с помощью радиочастотной (РЧ) энергии и/или энергии микроволновой частоты, исходящей от наконечника инструмента. Система 100 содержит генератор 102 для управляемой подачи РЧ энергии и/или микроволновой энергии. Подходящий генератор для этой цели описан в заявке WO 2012/076844, которая включена в данный документе посредством ссылки. Генератор 102 соединен со стыковочным соединением 106 стыковочным кабелем 104. Стыковочное соединение 106 также может быть соединено для приема источника 107 жидкости от устройства 108 для подачи жидкости, такого как шприц. При необходимости стыковочное соединение 106 может содержать механизм перемещения иглы, который приводится в действие путем скольжения спускового крючка 110. Функция стыковочного соединения 106 состоит в том, чтобы объединять входные отверстия от генератора 102, устройства 108 для подачи жидкости и механизма перемещения иглы с любыми другими входными отверстиями, которые могут быть необходимы, в один гибкий стержень 112, который проходит от дистального конца стыковочного соединения 106.
Гибкий стержень 112 может вводиться по всей длине инструментального (рабочего) канала эндоскопа 114. Гибкий стержень 112 имеет наконечник 118 инструмента, форма которого позволяет ему проходить через инструментальный канал эндоскопа 114 и выступать (например, внутри пациента) на дистальном конце трубки эндоскопа. Узел дистального конца содержит активный наконечник для подачи РЧ ЭМ энергии и/или микроволновой ЭМ энергии в биологическую ткань и необязательно выдвижную иглу для подкожных инъекций для доставки жидкости.
Конструкция наконечника 118 инструмента может быть выполнена таким образом, чтобы иметь максимальный внешний диаметр, подходящий для прохождения через рабочий канал. Как правило, диаметр рабочего канала в хирургическом устройстве для осмотра, таком как эндоскоп, составляет менее 4,0 мм, например имея любое из следующих значений: 2,8 мм, 3,2 мм, 3,7 мм и 3,8 мм. Длина гибкого стержня 112 может быть равна или больше 1,2 м, например 2 м или более. В других примерах наконечник 118 инструмента может быть установлен на дистальном конце гибкого стержня 112 после того, как стержень вводят через рабочий канал (и до того, как в тело пациента вводят присоединительный шнур инструмента). В качестве альтернативного варианта, гибкий стержень 112 может быть введен в рабочий канал с дистального конца перед выполнением его проксимальных соединений. В этих компоновках узел дистального конца 118 может иметь размеры, превышающие размеры рабочего канала хирургического устройства 114 для осмотра.
Описанная выше система является одним из способов введения инструмента в тело пациента. Возможны и другие методы. Например, инструмент также может быть введен посредством катетера.
Изобретение относится к обеспечению инструмента для подачи РЧ энергии и/или энергии микроволнового излучения в биологическую ткань, причем наконечник 118 инструмента может вращаться относительно гибкого стержня 112. Вращение наконечника 118 инструмента обеспечивается приводом (не показан), который выполнен из материала с эффектом запоминания формы (SME) и расположен на гибком стержне 112 рядом с наконечником 118 инструмента. Как более подробно описано ниже, привод выполнен так, что при нагревании он меняет форму таким образом, что это вызывает вращение наконечника 118 инструмента относительно гибкого стержня 112. Привод может быть нагрет либо непосредственно за счет пропускания через него электрического тока, либо с помощью нагревателя, который термически связан с приводом. Для нагрева привода управляемым образом система 100 дополнительно содержит источник 120 питания, который соединен со стыковочным соединением 106 через кабель 122. Источник 120 питания может использоваться для пропускания тока через привод и/или включения нагревателя, который термически связан с приводом. Управляя током, подаваемым источником 120 питания, можно регулировать изменение температуры привода, чтобы точно регулировать угол поворота наконечника 118 инструмента относительно стержня 112 инструмента.
Хотя источник 120 питания показан на фиг. 1 как отдельный компонент, можно понять, что он может входить в состав генератора (например, в качестве его выхода постоянного тока) или устройства 114 для осмотра, например в виде компонента, установленного или сформированного на нем как одно целое.
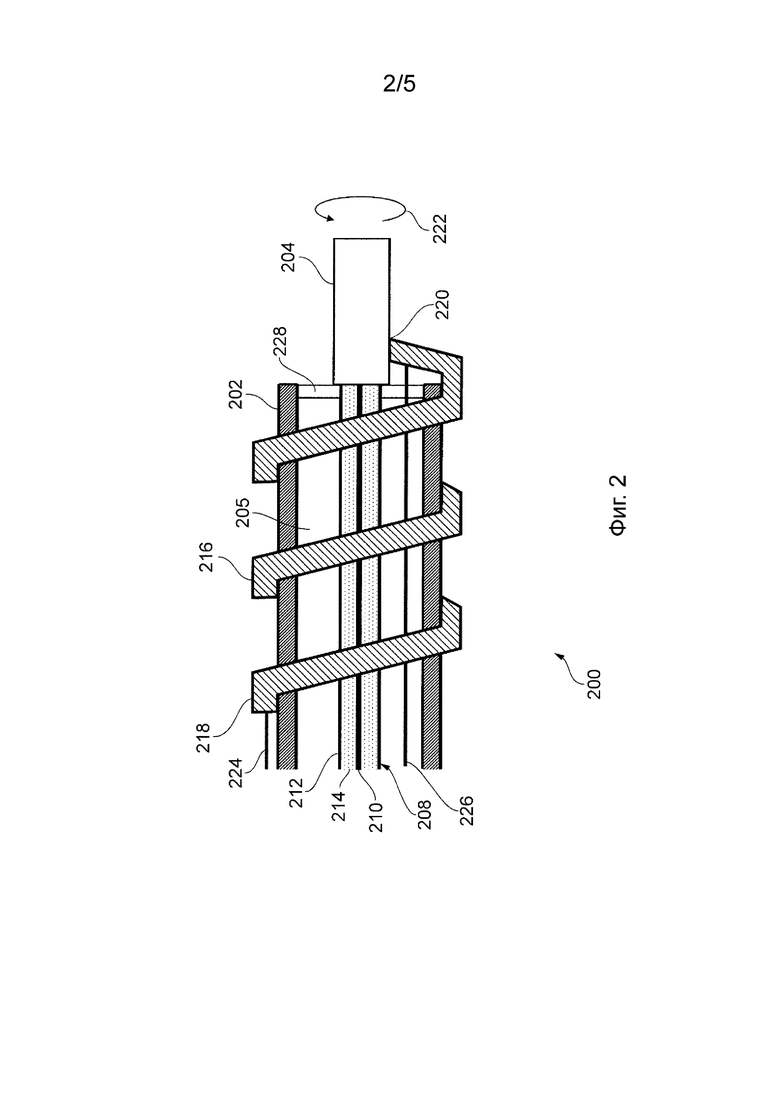
На фиг. 2 проиллюстрировано схематическое изображение электрохирургического инструмента 200, содержащего механизм управления, который является вариантом реализации данного изобретения. Электрохирургический инструмент 200 содержит стержень 202 (например, соответствующий описанному выше стержню 112), который представляет собой удлиненную трубчатую конструкцию, размеры которой могут обеспечить ее ввод в инструментальный канал хирургического устройства для осмотра. Стержень 202 может быть выполнен из гибкого материала по всей длине или части его длины, так что он может приспосабливаться к форме или конфигурации инструментального канала при его размещении на месте.
Из дистального конца стержня 202 выступает наконечник 204 инструмента, который выполнен с возможностью подачи радиочастотной энергии и/или энергии микроволновой частоты в биологическую ткань. Подходящая конструкция наконечника раскрыта, например, в WO 2014/006369, но данное изобретение не обязательно должно ограничиваться какими-либо особенностями конструкции наконечника.
Наконечник 204 инструмента электрически соединен с коаксиальным питающим кабелем 208, который предназначен для передачи РЧ ЭМ энергии и/или микроволновой ЭМ энергии (например, от генератора 102) на наконечник 204 инструмента. Коаксиальный питающий кабель 208 проходит в продольном направлении внутри просвета 205, образованного гибким стержнем 202. Коаксиальный питающий кабель 208 содержит внутренний проводник 210, который отделен от внешнего проводника 212 первым диэлектрическим материалом 214. Коаксиальный питающий кабель 208 может иметь малые потери энергии микроволновой частоты. На коаксиальном питающем кабеле 208 для предотвращения обратного распространения микроволновой энергии, отраженной от наконечника 204 инструмента, и, следовательно, для ограничения обратного нагрева вдоль устройства может быть предусмотрен дроссель (не показан).
Другие элементы (не показаны) электрохирургического инструмента 200 также могут размещаться в просвете 205 стержня 202, в зависимости от конкретной конфигурации электрохирургического инструмента 200. Например, жидкостный канал (такой как источник 107 жидкости), провода управления (например, механизм перемещения иглы, управляемый скользящим спусковым механизмом 110), и электрическая проводка (например, для одного или более датчиков, расположенных рядом с наконечником инструмента), могут размещаться внутри гибкого стержня 202. В некоторых вариантах реализации изобретения гибкий стержень 202 может содержать многопросветную конструкцию, причем различные элементы электрохирургического инструмента 200 расположены в соответствующих просветах многопросветной конструкции. Сам внутренний проводник 210 может быть полым, так что он может использоваться в качестве транспортного канала для подачи инструмента или другого материала (например, жидкости, такой как физиологический раствор) к наконечнику 204 инструмента и отвода от него.
Электрохирургический инструмент 200 дополнительно содержит привод 216, изготовленный из материала SME (например, нитинола, NiTi), расположенного на дистальном конце стержня 202. В этом примере привод 216 прикреплен первым концом 218 к гибкому стержню 202, а вторым концом 220 к наконечнику 204 инструмента. Привод 218 может быть закреплен своими концами с помощью любых подходящих средств, таких как адгезивное средство, механические крепления или сварка. В примере, проиллюстрированном на фиг. 2, привод 216 представляет собой провод, изготовленный из материала SME, который намотан вокруг дистальной части гибкого стержня 202, то есть гибкий стержень 202 проходит через обмотки привода 216. В целях иллюстрации гибкий стержень 202 и коаксиальный питающий кабель 208 были представлены в поперечном сечении, тогда как привод 216 показан обернутым вокруг внешней стороны гибкого стержня 202. На практике внутренняя часть гибкого стержня 202 не будет видна. Хотя в этом варианте реализации изобретения привод обернут вокруг внешней стороны стержня 202, в других примерах он может быть установлен внутри стержня 202, например прикреплен первым концом к внутренней поверхности стержня 202.
Дистальная часть может проходить на расстояние, равное или меньшее 20 см (предпочтительно 10 см), назад от дистального конца стержня 202. Таким образом, привод может быть расположен в той части стержня, которая не подвергается значительному изгибу в инструментальном канале хирургического устройства для осмотра.
Привод выполнен так, что при увеличении его температуры он деформируется таким образом, что это приводит к вращению наконечника 204 инструмента относительно гибкого стержня, как указано стрелкой 222. В примере в соответствии с фиг. 2 обмотка привода 216 выполнена с возможностью разматывания при увеличении его температуры. Поскольку привод 216 зафиксирован относительно гибкого стержня 202 на своем первом конце 218, разматывание обмотки вызывает вращение наконечника 204 инструмента относительно гибкого стержня 202. Для достижения этого эффекта привод сначала формируется в первой «размотанной» конфигурации при температуре выше его температуры перехода. После охлаждения до температуры ниже температуры перехода привод деформируется во вторую «намотанную» конфигурацию, в которой он может быть установлен на наконечнике инструмента и стержне. Когда температура привода поднимается до температуры перехода, он будет деформироваться обратно в первую конфигурацию, тем самым вращая наконечник инструмента.
Гибкий стержень 202 может быть зафиксирован на проксимальном конце электрохирургического инструмента (например, на стыковочном соединении 106) для предотвращения его вращения. Это гарантирует, что деформация привода не приведет к нежелательному вращению или скручиванию гибкого стержня 202. Кроме того, гибкий стержень 202 может содержать конструкцию, которая препятствует его скручиванию или предотвращает его скручивание вдоль своей длины. Такая конструкция может гарантировать, что деформация исполнительного механизма 216 предназначена преимущественно для вращения наконечника инструмента относительно стержня, поскольку вращение наконечника представляет наименьшее сопротивление вращающему моменту, создаваемому приводом.
Гибкий стержень 202 может быть сформирован из оплетенной трубки, содержащей гильзу из оплетенного провода (например, из нержавеющей стали), установленную между внутренним в радиальном направлении слоем полимера и внешним в радиальном направлении слоем полимера. Чтобы избежать влияния оплетенного провода на передачу радиочастотной энергии и/или энергии микроволновой частоты на наконечник 204 инструмента, дистальная часть гибкого стержня 202 (например, дистальная часть, вокруг которой наматывается привод) рядом с наконечником 204 инструмента может быть изготовлена только из полимерных слоев, то есть без внутренней оплетки.
Чтобы вызвать изменение температуры в приводе 216, через него можно пропустить ток. В примере, проиллюстрированном на фиг. 2, первый провод 224 соединен с первым концом 218 привода 216, а второй провод 226 соединен со вторым концом 220 привода 216. Источник питания (например, источник 120 питания) может быть подключен к проводам 224 и 226 для пропускания постоянного тока через привод 216, что может привести к нагреву привода 216 посредством эффекта Джоуля. В этом примере первый провод 224 проходит вдоль внешней поверхности вала 202, тогда как второй провод 226 расположен внутри просвета 205. Возможны и другие конфигурации проводки. Например, оба провода могут проходить через внутреннюю часть гибкого стержня 202 и выходить из гибкого стержня 202 на его дистальном конце, чтобы соединиться с концами привода 216.
Температуру привода 216 может контролировать датчик температуры (не показан), расположенный на приводе 216 или рядом с ним. Привод 216 может быть электрически изолирован, например, подходящим изолирующим покрытием, таким как парилен и т. п.
В качестве альтернативного варианта, нагреватель (не показан) может использоваться для повышения температуры привода 216. Нагреватель может быть установлен непосредственно на приводе 216 или он может быть установлен рядом с приводом 216, при этом между нагревателем и приводом обеспечена тепловая связь. Нагреватель может представлять собой резистивную микросхему, которая выделяет тепло при прохождении через нее тока. Преимущество использования нагревателя может заключаться в том, что для создания требуемого изменения температуры привода 216 может потребоваться более низкий ток по сравнению с подачей тока непосредственно через привод 216 (например, потому что материал SME может иметь низкое удельное электрическое сопротивление).
Коаксиальный питающий кабель 208 и любые другие компоненты, которые соединены с наконечником инструмента, могут свободно вращаться внутри гибкого стержня 202, чтобы облегчить вращение наконечника 204 инструмента. В случаях, когда коаксиальный питающий кабель 208 закреплен на проксимальном конце электрохирургического инструмента 200 таким образом, что он не может вращаться, коаксиальный питающий кабель 208 может быть выполнен с возможностью скручивания при вращении наконечника 204 инструмента. На дистальном конце гибкого стержня 202 может быть предусмотрено герметичное уплотнение 228, чтобы предотвратить попадание жидкости в гибкий стержень 202 или выход жидкости из него. Герметичное уплотнение 228 может иметь канал, через который выступает наконечник 204 инструмента и который позволяет вращать наконечник 204 инструмента относительно гибкого стержня 202. Канал может иметь такую форму, чтобы образовывать герметичное уплотнение с коаксиальным питающим кабелем 208 и/или наконечником 204 инструмента. В уплотнении 228 могут быть предусмотрены другие каналы, например, для провода 226. Уплотнение 228 также может служить для удержания наконечника 204 инструмента в фиксированном положении относительно гибкого стержня 202 при вращении наконечника 204 инструмента, например, за счет предотвращения продольного и/или поперечного перемещения наконечника 204 инструмента относительно гибкого стержня 202.
В других вариантах реализации изобретения может быть желательно не вызывать вращение и/или скручивание коаксиального питающего кабеля 208 при вращении наконечника 204 инструмента. Это может быть обеспечено путем предоставления гибкого и/или вращаемого соединения между коаксиальным питающим кабелем 208 и наконечником 204 инструмента. Вращаемое соединение может быть выполнено с возможностью удержания электрического соединения между коаксиальным питающим кабелем 208 и наконечником инструмента при вращении наконечника 204 инструмента.
Привод 216 может быть выполнен с возможностью деформации, когда он достигает заданной температуры перехода. Например, привод, изготовленный из NiTi, может быть выполнен с возможностью деформации при температуре перехода, составляющей около 40°C. Управляя температурой привода 216, можно регулировать вращение наконечника 204 инструмента относительно гибкого стержня 202. Например, привод 216 может нагреваться за счет подачи импульсов тока (либо непосредственно на привод, либо на нагреватель), так что температура привода может повышаться управляемым образом. В качестве альтернативного варианта может подаваться непрерывный ток. Контролируя температуру привода 216 с помощью датчика температуры, можно подавать ток для нагрева привода 216 до температуры перехода, при которой привод начинает деформироваться и вызывает вращение наконечника 204 инструмента относительно гибкого стержня 202. Чтобы остановить вращение наконечника 204 инструмента, температура привода 216 может быть снижена ниже температуры перехода (например, путем прекращения подачи тока). Привод может быть выполнен с возможностью вращения наконечника инструмента более чем на один полный оборот, когда он возвращается к первой «размотанной» конфигурации.
Материал SME привода может обладать эффектом одностороннего запоминания формы. Таким образом, привод может быть элементом одноразового использования или может потребовать ручного сброса ко второй «намотанной» конфигурации для последующего использования.
Однако в некоторых вариантах реализации изобретения привод может быть выполнен из «двухстороннего» SME материала. Материалы, демонстрирующие «двухсторонний» SME эффект могут быть подготовлены таким образом, чтобы им можно было периодически циклически придавать обе заданные формы путем их термического циклического переформирования. Таким образом, когда привод 216 изготовлен с использованием такого материала, нагрев привода 216 может привести к вращению наконечника 204 инструмента в одном направлении, в то время как охлаждение привода 216 приведет к вращению наконечника 204 инструмента в противоположном направлении.
В некоторых случаях также может быть желательно снабдить инструмент 200 механизмом активного охлаждения привода 216 при использовании, чтобы повысить точность управления температурой привода 216. Например, инструмент 200 может содержать охлаждающий контур (не показан), причем охладитель (например, вода, физиологический раствор или тому подобное) может избирательно подаваться на привод. В одном примере привод может находиться в тепловом контакте с теплообменником, через который может избирательно циркулировать охладитель. В качестве альтернативного варианта, охладитель может непрерывно циркулировать, будучи в контакте с теплообменником, благодаря чему для точного управления температурой привода можно регулировать баланс между мощностью охлаждения, обеспечиваемой контуром охлаждения, и мощностью нагрева, обеспечиваемой подаваемым током. Такое регулирование может выполняться автоматически, например, с помощью ПИД-регулирования или тому подобного.
В других примерах механизм охлаждения может содержать насадку, предназначенную для распыления охладителя непосредственно на привод, чтобы снизить его температуру.
Возможны разные формы и конфигурации привода 216. Например, привод может представлять собой гильзу, изготовленную из материала SME, в которой содержится дистальная часть гибкого стержня, а не провод, как показано на фиг. 2. В альтернативном варианте привод может быть образован из двух или более взаимодействующих обмоток, выполненных из материала SME. Таким образом, может быть уменьшена нагрузка на каждую отдельную обмотку, создаваемая крутящим моментом. Это может содействовать увеличению общего крутящего момента, который может прикладываться приводом к наконечнику инструмента, а также снижению риска выхода из строя одной из обмоток.
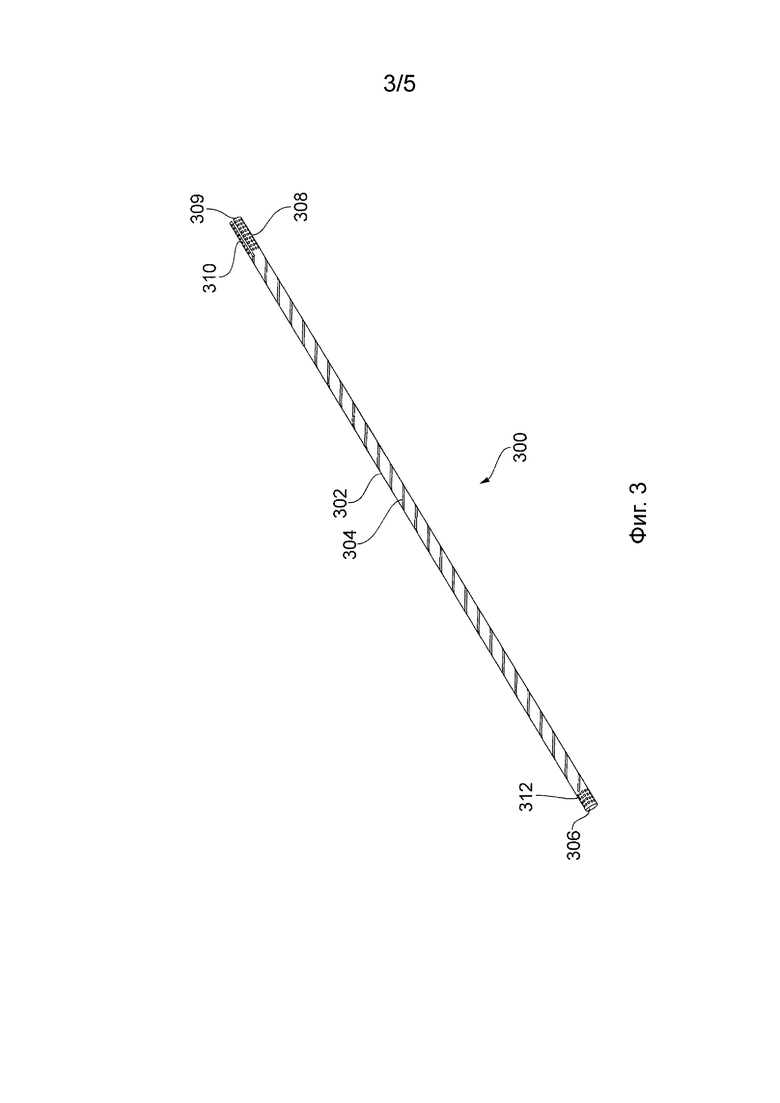
На фиг. 3 проиллюстрировано схематическое изображение привода 300, который можно использовать в электрохирургическом инструменте в соответствии с данным изобретением. Привод 300 сформирован двумя взаимодействующими спиралями (первой спиралью 302 и второй спиралью 304), изготовленными из материала SME (предпочтительно NiTi). Привод 300 можно использовать для поворота наконечника инструмента на 540 градусов (то есть на полтора оборота) за счет разматывания спиралей, когда температура привода 300 поднимается выше его температуры фазового перехода.
Обе спирали 302 и 304 сформированы из провода, имеющего приблизительно прямоугольное поперечное сечение. Обе спирали 302 и 304 соединены на дистальном конце 306 привода 300, так что обе спирали электрически соединены на дистальном конце 306. Первая спираль 302 содержит первый электрический зажим 308 на проксимальном конце 309 привода 300, а вторая спираль 304 содержит второй электрический зажим 310 на проксимальном конце 309. Таким образом, первая и вторая спирали 302 и 304 образуют непрерывный путь тока, и ток может подаваться через привод 300 для его нагрева с помощью первого электрического зажима 308 и второго электрического зажима 310. Привод 300 может быть выполнен как одно целое из одного куска материала.
Взаимодействующие спирали 302 и 304 образуют гильзу, через которую может проходить гибкий стержень электрохирургического инструмента. На дистальном конце привода 300 образован соединитель 312 для крепления привода 300 к наконечнику инструмента. Соединитель 312 содержит ряд швов, полученных ультразвуковой сваркой, которые можно использовать для ультразвуковой приварки наконечника инструмента к соединителю 312. В примере, проиллюстрированном на фиг. 3, швы, полученные ультразвуковой сваркой, представляют собой ряд отверстий, которые предназначены для приема дополняющих друг друга швов, полученных ультразвуковой сваркой (например, выступов, которые подходят к отверстиям) на наконечнике инструмента, чтобы обеспечить прочную связь между приводом 300 и наконечником инструмента. Подобные элементы, полученные ультразвуковой сваркой, обеспечиваются на спиралях 302 и 304 на проксимальном конце 309 привода, причем они позволяют сварить привод 300 на его проксимальном конце 309 с гибким стержнем с помощью дополнительных элементов на гибком стержне, полученных ультразвуковой сваркой. Использование дополнительных элементов, полученных ультразвуковой сваркой, может обеспечить эффективную передачу крутящего момента от привода 300 к наконечнику инструмента и может препятствовать скольжению привода 300 относительно гибкого стержня и/или наконечника инструмента. Преимущественно, элементы, полученные ультразвуковой сваркой, на приводе 300 также могут использоваться для удержания привода на месте при тепловой обработке привода в процессе его изготовления.
На фиг. 4А и 4В проиллюстрированы более детальные виды соответственно дистального конца 306 и проксимального конца 309 привода 300. Как можно видеть на фиг. 4А, две спирали 302 и 304 выполнены как одно целое с соединителем 312, который соединяет их механически и электрически. Соединитель 312 содержит ряд отверстий 402, которые служат в качестве описанных выше элементов, полученных ультразвуковой сваркой. Как проиллюстрировано на фиг. 4В, электрические зажимы 308 и 310 на проксимальном конце 309 привода имеют образованные в них отверстия 404, которые можно использовать в качестве описанных выше элементов, полученных ультразвуковой сваркой. Спирали 302 и 304 могут начинаться на расстоянии приблизительно 10 мм от проксимальных краев соответственно электрических зажимов 310 и 308.
На фиг. 5 проиллюстрирован схематический вид в поперечном сечении гибкого стержня 500 электрохирургического инструмента в соответствии с данным изобретением. На фиг. 5 не показаны коаксиальный питающий кабель и любые другие компоненты, которые могут располагаться в гибком стержне 500. Несколько фиксирующих выступов 502 расположены на внешней поверхности гибкого стержня 500. Фиксирующие выступы 502 выполнены с возможностью взаимодействия с дополняющими друг друга элементами зацепления (например, отверстиями 404) на проксимальном конце привода (не показан), так что привод и гибкий стержень зафиксированы с возможностью вращения относительно друг друга. Фиксирующие выступы 502 могут быть выполнены из того же материала, что и гибкий стержень 500, и могут быть выполнены как одно целое с гибким стержнем 500. Фиксирующие выступы могут представлять собой элементы, полученные ультразвуковой сваркой, так что их можно использовать для ультразвукового сваривания гибкого стержня 500 с приводом, чтобы обеспечить прочную связь между обоими компонентами. Аналогичные фиксирующие выступы также могут быть предусмотрены на наконечнике инструмента, так что он может быть зафиксирован с возможностью вращения относительно привода таким образом, что крутящий момент может эффективно передаваться от привода к наконечнику инструмента.
Ниже будут приведены представленные в качестве примера расчеты, показывающие, как можно определить механические требования к приводу, используемому в электрохирургическом инструменте в соответствии с изобретением.
Во время эксперимента авторы изобретения обнаружили, что для вращения кабеля инструмента (например, коаксиального питающего кабеля для передачи радиочастотной энергии и/или энергии микроволновой частоты) на 180 градусов, когда кабель изогнут назад на 170 градусов (то есть кабель согнут под углом 170 градусов), необходимо обеспечить крутящий момент, составляющий около 56 × 10-3 Н⋅м. Чтобы электрохирургический инструмент проходил через инструментальный канал эндоскопа, авторы изобретения выбрали диаметр 3,10 мм в качестве максимального наружного диаметра для привода, расположенного вокруг дистальной части гибкого стержня электрохирургического инструмента. Авторы изобретения выбрали диапазон вращения 540 градусов для наконечника инструмента относительно гибкого стержня. Поэтому требования, предъявляемые авторами изобретения к конструкции привода, были следующими:
крутящий момент:56 × 10-3 Н⋅м;
диапазон вращения наконечника инструмента: 540 градусов;
Максимальный наружный диаметр привода: 3,10 мм.
Для расчета различных свойств привода могут быть использованы следующие уравнения, причем используемые символы приведены ниже в таблице 1:
(1) 
(2) 
(3) 
(4) 
(5) E=83000 МПа
(6) S=895 МПа.
Таблица 1. Определение параметров
Уравнения (1) и (2) могут использоваться для описания спиральной обмотки, образованной из провода, имеющего круглое сечение, а уравнения (3) и (4) могут использоваться для описания спиральной обмотки, образованной из провода, имеющего прямоугольное сечение. Значения, приведенные в уравнениях (5) и (6), являются значениями для NiTi («нитинола»), который авторы изобретения используют для этого расчета. Требуемый крутящий момент для обмотки может быть уменьшен вдвое при использовании двух взаимодействующих спиральных обмоток. Таким образом, требуемый крутящий момент для одной из двух взаимодействующих обмоток составляет M=28×10-3 Н⋅м.
Наружный диаметр гибкого стержня электрохирургического инструмента может составлять 2,66 мм. Если обмотки привода являются концентрическими с гибким стержнем, а максимальный наружный диаметр составляет 3,10 мм, может быть принято, что толщина t будет составлять t=0,22 мм. Авторы изобретения использовали 75% значения в уравнении (6), как это принято в конструкции пружины. Уравнение преобразования (4) для определения b имеет следующий вид:
(7)  .
.
С помощью значений, указанных выше, можно определить, что b=5,18 мм. Поэтому поперечное сечение спирального провода определяется как t=0,22 мм и b=5,18 мм. Следующий расчет включает в себя определение количества витков пружины, необходимого для обеспечения необходимого поворота на 540 градусов (T=1,5 оборота). Спиральный провод должен соответствовать диаметру гибкого стержня, составляющему 2,66 мм, поэтому D=2,66 мм +0,22 мм =2,88 мм. В том случае, когда спиральный провод находится в режиме разматывания (то есть разматывается при нагревании), его диаметр увеличивается при разматывании. Уравнение преобразования (3) для определения количества витков обмотки, необходимого для суммарной деформации в 1,5 оборота, дает следующее:
(8)  .
.
Используя значения, упомянутые выше, уравнение (8) дает Nt ≈ 13. Далее можно рассчитать увеличение диаметра при суммарной деформации в 1,5 оборота. Следующая формула используется для аппроксимации внутреннего диаметра спиральной обмотки при суммарной деформации:
(9)  .
.
Обратная величина данного уравнения используется в том случае, когда спиральная обмотка раскручивается:
(10)  .
.
Используются следующие параметры: ID=2,66 мм, Nt=13 мм и T=1,5, уравнение (10) дает IDt=2,97 мм, что означает, что наружный диаметр ODt спиральной обмотки будет составлять 3,41 мм.
Рассчитанные выше размеры были использованы для создания модели САПР (модель Системы Автоматизированного Проектирования) привода, имеющего взаимодействующую спиральную структуру (как показано на фиг. 3), чтобы рассчитать объем твердого тела V=2,9182 × 10-7 м-3. Плотность нитинола составляет 6450 кг/м3. Это дает массу 1,88 г для привода. Удельная теплоемкость нитинола составляет c=837,36 Дж/кг/К. Температура перехода нитинола составляет 40°C, поэтому, начиная с комнатной температуры, требуется изменение температуры θ=19°C, чтобы температура привода достигла температуры перехода. Суммарная энергия, необходимая для изменения температуры привода, определяется следующим образом:
(11)  .
.
Используя уравнение (11) и вышеупомянутые величины, требуемая суммарная энергия составляет H=29,91 Дж. Кроме того, модель САПР использовали для расчета длины каждой из спиральных обмоток (200,2 мм). Удельное сопротивление нитинола составляет ρнитинол=9,72 × 10-7 Ом⋅м. Следовательно, электрическое сопротивление привода (с учетом длины обеих спиральных обмоток) составляет около 0,34 Ом. Используется уравнение мощностей:
(12)  ,
,
ток, составляющий I=9,38 А, может быть пропущен через привод в течение 1 с для достижения требуемого повышения температуры. В качестве альтернативного варианта, требуемая мощность может подаваться импульсами тока с более высокой амплитудой в течение более коротких периодов времени, например 29,91 Дж может подаваться в виде импульса мощностью 299,1 Вт в течение 100 мс.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2018 |
|
RU2772044C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2772395C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ-РЕЗЕКТОР | 2018 |
|
RU2775542C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2769299C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ АБЛЯЦИОННЫЙ ИНСТРУМЕНТ | 2018 |
|
RU2772683C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2770276C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2772684C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2770455C1 |
| ЭЛЕКТРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ РАДИОЧАСТОТНОЙ ЭНЕРГИИ И/ИЛИ МИКРОВОЛНОВОЙ ЭНЕРГИИ В БИОЛОГИЧЕСКУЮ ТКАНЬ | 2018 |
|
RU2768604C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2019 |
|
RU2779032C1 |


Группа изобретений относится к медицине и предназначена для управления электрохирургического инструмента при его использовании. Изобретение предусматривает использование материала с эффектом запоминания формы (SME), такого как нитинол, в приводе для осуществления вращения электрохирургического инструмента. Привод может быть частью механизма управления для вращения наконечника электрохирургического инструмента относительно гибкого стержня, который заключает в оболочку компоненты инструмента, когда они доставляются по инструментальному каналу хирургического устройства для осмотра. При этом материал SME в приводе может быть выполнен так, что при изменении температуры его форма изменяется таким образом, что это приводит к вращению наконечника инструмента. Регулируя изменение температуры, можно точно управлять относительным вращением наконечника инструмента. В электрохирургическом инструменте в соответствии с изобретением используется электрический ток. Способы позволяют обеспечить дистанционное управление ориентацией инструмента относительно места обработки. 3 н. и 19 з.п. ф-лы, 5 ил.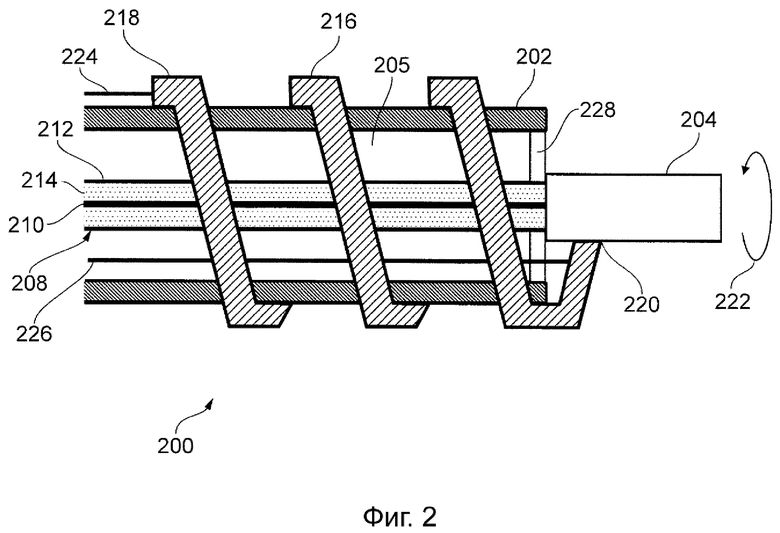
1. Механизм управления для вращения наконечника инструмента, расположенного на дистальном конце инструментального канала в хирургическом устройстве для осмотра, содержащий:
привод, выполненный из материала с эффектом запоминания формы; и
конструкцию передачи энергии, соединенную с приводом для передачи энергии, с последующим изменением температуры материала с эффектом запоминания формы,
при этом привод выполнен с возможностью возникновения крутящего момента между его проксимальным концом и дистальным концом в ответ на достижение материалом с эффектом запоминания формы пороговой температуры.
2. Механизм управления по п. 1, отличающийся тем, что материал с эффектом запоминания формы содержит спиральную структуру.
3. Механизм управления по п. 2, отличающийся тем, что материал с эффектом запоминания формы выполнен с возможностью разматывания при достижении материалом с эффектом запоминания формы пороговой температуры.
4. Механизм управления по любому из предшествующих пунктов, отличающийся тем, что материал с эффектом запоминания формы содержит пару взаимодействующих спиральных структур.
5. Механизм управления по любому из предшествующих пунктов, содержащий источник питания, соединенный с конструкцией передачи энергии.
6. Механизм управления по любому из предшествующих пунктов, отличающийся тем, что конструкция передачи энергии содержит проводящий элемент для пропускания электрического тока через привод.
7. Механизм управления по любому из предшествующих пунктов, отличающийся тем, что конструкция передачи энергии содержит нагреватель, термически соединенный с приводом.
8. Механизм управления по любому из предшествующих пунктов, содержащий конструкцию для подачи охладителя, предназначенную для извлечения тепловой энергии из привода.
9. Механизм управления по п. 8, отличающийся тем, что конструкция для подачи охладителя содержит контур охладителя, находящийся в тепловой связи с приводом.
10. Механизм управления по п. 8 или 9, отличающийся тем, что конструкция для подачи охладителя работает избирательно.
11. Механизм управления по любому из предшествующих пунктов, отличающийся тем, что материал с эффектом запоминания формы представляет собой сплав с запоминанием формы.
12. Механизм управления по любому из предшествующих пунктов, отличающийся тем, что материал с эффектом запоминания формы представляет собой нитинол.
13. Механизм управления по любому из предшествующих пунктов, отличающийся тем, что материал с эффектом запоминания формы обладает эффектом двухстороннего запоминания формы для обеспечения двунаправленного управления вращением.
14. Электрохирургический инструмент для подачи радиочастотной (РЧ) электромагнитной (ЭМ) энергии и/или микроволновой ЭМ энергии в биологическую ткань, содержащий:
коаксиальный кабель для передачи РЧ ЭМ энергии и/или микроволновой ЭМ энергии;
наконечник инструмента, присоединенный на дистальном конце коаксиального кабеля, для приема РЧ ЭМ энергии и/или микроволновой ЭМ энергии и подачи ее в биологическую ткань в месте обработки;
удлиненный стержень, определяющий просвет для подвода коаксиального кабеля, при этом наконечник инструмента выступает из дистального конца гибкого стержня; и
механизм управления по любому из пп. 1-12, отличающийся тем, что проксимальный конец привода прикреплен к стержню, а дистальный конец привода прикреплен к наконечнику инструмента.
15. Электрохирургический инструмент по п. 14, отличающийся тем, что материал с эффектом запоминания формы образует гильзу вокруг дистальной части стержня.
16. Электрохирургический инструмент по п. 14 или 15, отличающийся тем, что содержит спиральную структуру, намотанную вокруг внешней поверхности стержня.
17. Электрохирургический инструмент по любому из пп. 14-16, содержащий элементы зацепления в месте соединения между стержнем и проксимальным концом привода, выполненные с возможностью сопротивления относительному вращению между стержнем и приводом.
18. Электрохирургический инструмент по п. 17, отличающийся тем, что элементы зацепления содержат взаимодействующие зацепляющиеся друг за друга элементы на стержне и приводе.
19. Электрохирургический инструмент по любому из пп. 14-18, содержащий элементы зацепления в месте соединении между наконечником инструмента и дистальным концом привода, выполненные с возможностью сопротивления относительному вращению между наконечником инструмента и приводом.
20. Электрохирургический инструмент по п. 18, отличающийся тем, что элементы зацепления содержат взаимодействующие зацепляющиеся друг за друга элементы на стержне и приводе.
21. Электрохирургический инструмент по любому из пп. 14-20, отличающийся тем, что проксимальный конец привода прикреплен к стержню с помощью сварки.
22. Электрохирургическая система, содержащая:
генератор для генерирования радиочастотной (РЧ) электромагнитной (ЭМ) энергии и/или микроволновой ЭМ энергии;
электрохирургический инструмент по любому из пп. 14-21, соединенный с генератором; и
хирургическое устройство для осмотра, имеющее маневренный присоединительный шнур инструмента с проходящим через него инструментальным каналом,
при этом размер электрохирургического инструмента рассчитан на прохождение через инструментальный канал.
| US 4790624 A, 13.12.1988 | |||
| СВЕТОСИЛЬНЫЙ ОБЪЕКТИВ | 2013 |
|
RU2545465C1 |
| US 2017056105 A1, 02.03.2017 | |||
| WO 2016156542 A1, 06.10.2016 | |||
| ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ, ОБЛАДАЮЩАЯ ПРОТИВОДИАБЕТИЧЕСКОЙ, ГИПОЛИПИДЕМИЧЕСКОЙ, ГИПОГЛИКЕМИЧЕСКОЙ И ГИПОХОЛЕСТЕРИНЕМИЧЕСКОЙ АКТИВНОСТЬЮ, СПОСОБ ЕЕ ПОЛУЧЕНИЯ И СПОСОБЫ ЛЕЧЕНИЯ УКАЗАННЫХ ЗАБОЛЕВАНИЙ | 2007 |
|
RU2361581C2 |

