Область техники
Изобретение относится к области радиотехники, в частности к радиопередающим устройствам для создания усилителей мощности с низким уровнем внеполосных излучений, используемых в радиосвязи и телерадиовещании.
Уровень техники
Интенсивное использование радиочастотного спектра обостряет проблему ЭМС радиосредств, работающих в соседних полосах частот. Основным источником помех в таких условиях являются внеполосные излучения, которые возникают, в основном, в выходных высокочастотных усилителях мощности (УМ). Пониженный уровень внеполосных излучений имеют УМ, работающие в режиме класса А, однако они имеют низкий КПД и экономически не эффективны. Энергетически эффективные УМ с высоким КПД работают в нелинейных режимах и создают недопустимый уровень внеполосных излучений.
Известны способы и устройства линеаризующие такие усилители или компенсирующие внеполосные излучения. В патенте RU 2731135 "Радиопередающее устройство с цифровой коррекцией нелинейности" описано устройство минимизации амплитудных и фазовых искажений передаваемого сигнала в условиях быстро изменяющейся и априорно неопределённой нелинейности передаточной характеристики радиотракта. Устройство содержит цифровой корректор нелинейности, использующий взвешенную сумму E-полиномов, и измеритель комбинационных составляющих, вычисляющий амплитуду и фазу искажений с помощью Фурье-преобразования. Полученные амплитуды искажений нормируют к входному сигналу, а фазы поворачивают на 180°, после чего искажения поступают на цифровой корректор нелинейности, в котором с использованием Е-полиномов формируется передаточная характеристика, компенсирующая искажения, вносимые УМ. Формирование передаточной характеристики цифрового корректора проводят на тестовом (двухтоновом) сигнале при отсутствии информационного сигнала. Недостатками представленного устройства являются необходимость измерения и предварительного описания передаточной характеристики цифрового корректора нелинейности с помощью Е-полиномов, а также необходимость периодической калибровки устройства тестовым сигналом с прерыванием передачи информационного сигнала.
В материалах симпозиума 2009 IEEE International Symposium on Radio-Frequency Integration Technology описан способ линеаризации УМ с использованием метода прямой связи (Power Amplifier Linearization Using Feedforward Technique for Wide Band Communication System). В данном способе компенсация искажений УМ осуществляют в два этапа. На первом этапе после выравнивания амплитуд, фаз и задержек входного и выходного сигналов УМ осуществляют вычитание входного сигнала из выходного в результате на выходе вычитателя выделяются искажения сигнала. На втором этапе выделенные искажения вычитают из выходного сигнала УМ, тем самым исключая их из выходного сигнала УМ. Для успешной реализации данного способа на каждом этапе необходимо точное выравнивание амплитуд, фаз и задержек взаимодействующих сигналов. Устройства, реализующие данный способ, содержат как минимум два следящих контура регулирования, обеспечивающие выравнивание параметров сигналов. В данном способе компенсация искажений происходит на выходе УМ, поэтому перед вычитанием искажения должны быть усилены до необходимого уровня линейным УМ, что приводит к снижению КПД устройства в целом. Кроме того, необходимость использования как минимум двух контуров, снижает устойчивость устройства.
Наиболее близким аналогом предлагаемого изобретения, является способ и устройство, описанные в патенте США US8774314 B2 TRANSMITTER ARCHITECTURES. В данном способе, как и в предыдущем компенсация искажений УМ осуществляют в два этапа. На первом этапе после выравнивания амплитуд, фаз и задержек входного и выходного сигналов УМ осуществляют вычитание входного сигнала из выходного. В результате на выходе вычитателя выделяются искажения сигнала. В отличие от предыдущего аналога, на втором этапе выделенные искажения суммируют с входным сигналом, при этом амплитуду и фазу искажений устанавливают таким образом, чтобы скомпенсировать искажения на выходе УМ.
Устройство, реализующее данный способ, как минимум содержит последовательно включенные первый сумматор и УМ. Вход сумматора является входом устройства, а выход УМ - выходом устройства. Устройство также содержит контур регулирования для выравнивания амплитуд и фаз входного и выходного сигнала, и блок сопряжения для коррекции амплитуды и фазы искажений, вводимых на вход УМ через вычитающий вход первого сумматора. При этом один вход контура регулирования подключен к выходу УМ, а другой - ко входу устройства. Выход контура регулирования подключен к вычитающему входу второго сумматора. Другой вход второго сумматора подключен к выходу УМ. А выход второго сумматора подключен ко входу блока сопряжения, выход которого подключен к вычитающему входу первого сумматора. По существу, работа устройства осуществляется так же, как и в аналоге, описанном выше, но ввод компенсирующего сигнала осуществляется на входе УМ.
Цепь, состоящая из последовательно включённых первого сумматора, УМ, второго сумматора и блока сопряжения, выход которого подключен к первому сумматору, образуют замкнутый контур управления, таким образом в устройстве присутствуют два взаимосвязанных контура управления, что может приводить к нестабильности устройства. Кроме того, компенсирующий сигнал формируется из выходного сигнала УМ, т.е. с задержкой по отношению к входному сигналу, что снижает эффективность устройства.
Раскрытие сущности изобретения
В соответствии с предлагаемым способом, повышение линейности УМ осуществляется в два этапа. На первом этапе после выравнивания амплитуд, фаз и задержек входного и выходного сигналов УМ осуществляют вычитание входного сигнала из выходного. В результате чего выделяются искажения. Наблюдая входной сигнал и искажения, определяют функциональную зависимость сигнала искажений от входного сигнала. После того как функциональная зависимость определена, ее выделяют в виде отдельной функции. Затем, используя в качестве аргумента этой функции огибающую текущего входного сигнала, с помощью этой функции синтезируют компенсирующий сигнал, который является моделью искажений в усилителе мощности. На втором этапе компенсирующий сигнал вычитают из входного сигнала. Т.к. формирование компенсирующего сигнала, и определение функциональной зависимости проводят независимо, то контур регулирования оказывается разомкнутым, что обеспечивает устойчивость устройства в целом. Кроме того, в предлагаемом способе формирование компенсирующего сигнала осуществляется на основе текущего входного сигнала, т.е. без задержек в контуре регулирования, что улучшает компенсацию искажений.
Аналитически процесс можно описать следующим образом.
Сигнал на выходе УМ имеет вид:
 , (1)
, (1)
где
y(t) - выходной сигнал;
t - время;
K0 - постоянный коэффициент усиления УМ;
K(x(t-τ)) - нелинейная часть выходного сигнала УМ;
τ - задержка сигнала в УМ;
x(t) - входной сигнал УМ.
Причем на практике всегда мощность искажений УМ существенно меньше мощности сигнала, т.е. выполняется условие
 , (2)
, (2)
где черта сверху - среднее значение. ¬¬
Выражение (1) можно представить в виде:
 , (3)
, (3)
где
y0(t) - линейная часть выходного сигнала УМ;
yn(t) - искажения выходного сигнала УМ,
и соответственно
 , (4)
, (4)
 . (5)
. (5)
После взаимного выравнивания амплитуд, фаз и задержек входного и выходного сигналов УМ и вычитания входного сигнала из выходного получим:
 . (6)
. (6)
В результате выделяются искажения с точностью до постоянного коэффициента 1/K0.
Существует функциональная зависимость искажений un(t) от входного сигнала xin(t)
 , (7)
, (7)
где F(xin(t)) - функциональная зависимость;
xin - входной сигнал устройства.
Функциональная зависимость с точностью до постоянного коэффициента K0 соответствует нелинейной части выходного сигнала УМ в выражении (5).
Функциональную зависимость F(xin(t)) после аппроксимации виде отдельной функции используют для формирования компенсирующего сигнала:
 . (8)
. (8)
Компенсирующий сигнал вычитают из входного сигнала:
 . (9)
. (9)
Отсюда, учитывая (3) и (2), получим сигнал на выходе УМ:
 . (10)
. (10)
Вычитаемое в (10) характеризует остаточные искажения на выходе УМ, вызванные подмешиванием компенсирующего сигнала на его входе, и составляет величину:
 . (11)
. (11)
С учетом условия (2) видно, что остаточные искажения уменьшаются по квадратичной зависимости по отношению к исходному значению. Например, если исходный УМ имел уровень искажений минус 30дБ, то при использовании предлагаемого способа уровень искажений может составлять минус 60дБ.
Функциональную зависимость искажений от входного сигнала (7) для УМ, не имеющего эффекта памяти, аппроксимируют в виде произведения входного сигнала на параметризированную функцию от амплитуды входного сигнала
 , (12)
, (12)
где Λ - вектор параметров функции f.
Для компенсации искажений УМ с эффектом памяти функциональную зависимость (7) аппроксимируют на интервале памяти УМ, что может быть записано в следующем виде:
 (13)
(13)
где M - глубина памяти УМ по входному сигналу;
K - глубина памяти УМ по амплитуде входного сигнала.
Функция f(|xin(n)|, Λ) может быть представлена в различных формах, например, (но не ограничиваясь) таблица поиска, интерполяционные полиномы и др.
Устройство для осуществления данного способа (см. фигуру 1) содержит как минимум последовательно включенные первый сумматор (1) и УМ (2). Вход сумматора (1) является входом устройства, а выход УМ (2) - выходом устройства. Устройство также содержит контур регулирования (3) для взаимного выравнивания амплитуд, фаз и задержки входного и выходного сигналов. При этом один вход контура регулирования (3) подключен к выходу устройства, а другой - ко входу устройства. Устройство содержит второй сумматор (4), вычитающий вход которого подключен, к первому выходу контура регулирования (3), а другой вход сумматора (4) подключен ко второму выходу контура регулирования (3). При этом соответственно на первом и втором выходах контура регулирования (3) формируется входной и выходной сигналы УМ, сбалансированные по амплитуде, фазе и задержке.
Устройство отличается тем, что в него дополнительно введены последовательно включенные блок расчета параметров функции предыскажений (5), ключ (6) (необязательный элемент), блок функции предыскажений (7) и блок выравнивания фазы (8). При этом вход блока выравнивания фазы (8) подключен к выходу блока функции предыскажений (7), а его выход - ко второму входу первого сумматора (1). Второй вход блока функции предыскажений (7) подключен ко входу устройства. Первый вход блока расчета параметров функции предыскажений (5) подключен к первому выходу контура регулирования (3), а второй вход - к выходу второго сумматора (4).
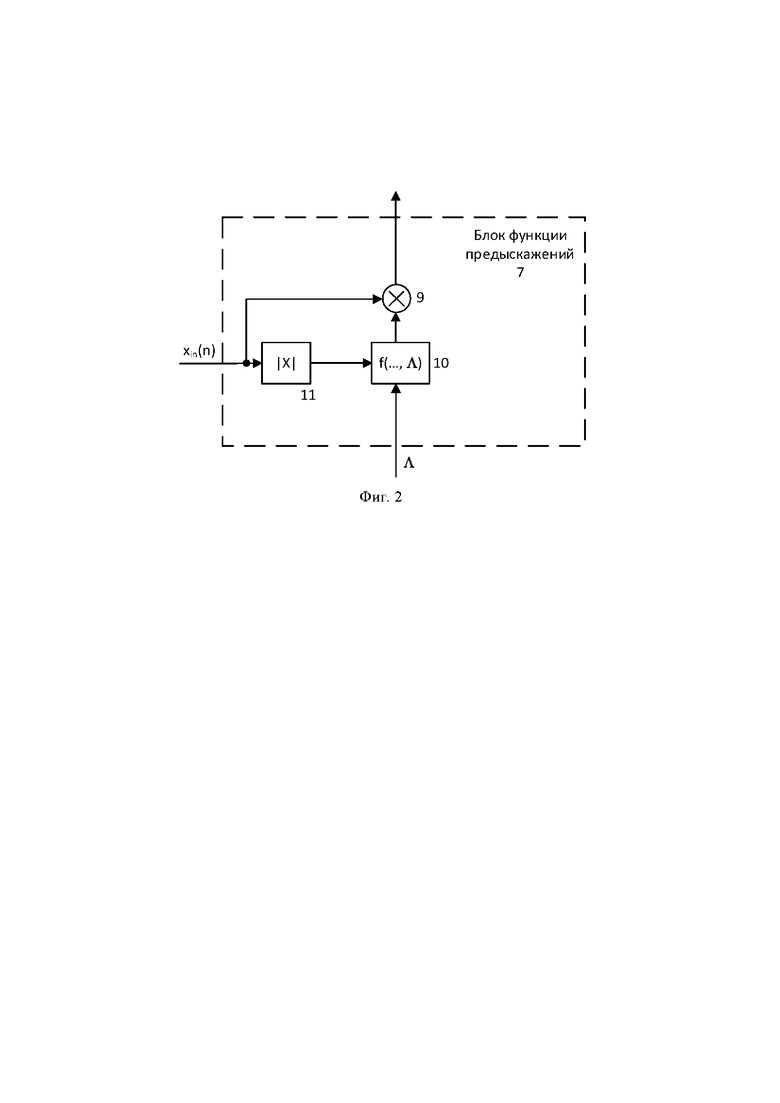
Для компенсации искажений УМ (2), не имеющего эффекта памяти, блок функции предыскажений (7) содержит соединенные последовательно вычислитель амплитуды сигнала (11), блок вычисления параметризированной функции (10) и умножитель (9), выход умножителя является выходом блока функции предыскажений, а второй вход умножителя соединен со входом вычислителя амплитуды сигнала и является вторым входом блок функции предыскажений (7), при этом первым входом блок функции предыскажений является второй вход блока вычисления параметризированной функции (10).
Работа устройства осуществляется следующим образом. После выравнивания амплитуд, фаз и задержек входного и выходного сигнала в контуре регулирования (3), они поступают на второй сумматор (4), на выходе которого формируется сигнал искажений в соответствии выражением (6). Используя сигнал искажений и входной сигнал, прошедший контур регулирования (3), в блоке расчета параметров функции предыскажений (5) вычисляют вектор параметров функциональной зависимости сигнала искажений от входного сигнала, который передают через замкнутый ключ (6) в блок функции предыскажений (7). При этом ключ (6) является необязательным элементом, т.к. вектор параметров функции предыскажений может обновляться как непрерывно, так и эпизодически, по необходимости, или единожды при изготовлении устройства, если он будет предопределен для всех режимов работы УМ описанным выше способом. Ключ (6) используют в соответствии с выбранным вариантом обновления вектора параметров в блоке функции предыскажений. На второй вход блока функции предыскажений (7) поступает входной сигнал, по которому осуществляется вычисление значения функции предыскажений в данный момент времени. Это происходит путем умножения в умножителе (9) входного сигнала на значение параметризированной функции f(…, Λ), получаемого из блока вычисления этой функции (10). При этом вычисление параметризированной функции f(…, Λ) осуществляется для действующего в данный момент времени значения амплитуды входного сигнала, получаемого из вычислителя амплитуды сигнала (11).
На выходе блока функции предыскажений (7) формируется компенсирующий сигнал в соответствии с выражением (12). Затем в блоке выравнивания фазы (8) изменяется фаза компенсирующего сигнала так, чтобы в первом сумматоре (1) компенсирующий сигнал вычитался из входного сигнала устройства в соответствии с выражением (9). В результате на выходе УМ будет сформирован сигнал в соответствии с выражением (10). При этом уровень остаточных искажений уменьшается по квадратичной зависимости по отношению к исходному значению.
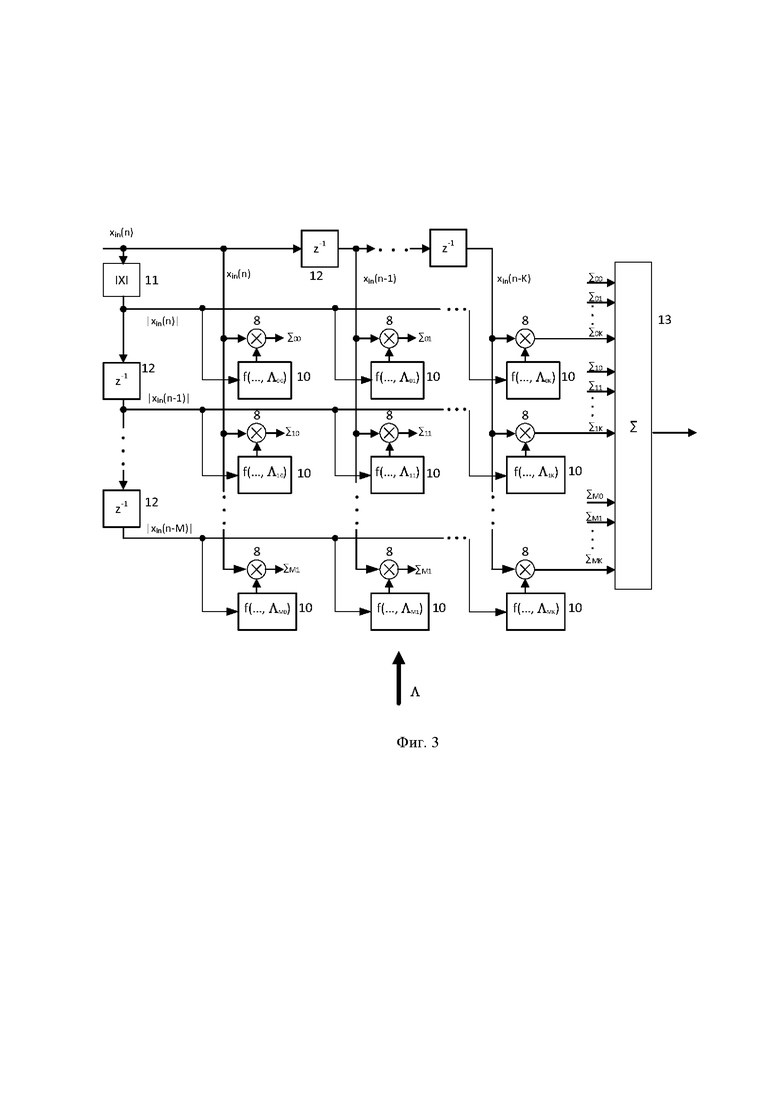
При компенсации искажений в УМ (2) с эффектом памяти, в блоке функции предыскажений (7) вычисляют функциональную зависимость искажений от входного сигнала в виде суммы произведений задержанного входного сигнала на параметризированную функцию от задержанной амплитуды входного сигнала для всех комбинаций задержек входного сигнала и задержек амплитуды входного сигнала на интервале памяти усилителя мощности. При этом блок функции предыскажений (7) содержит M+1 умноженное на K+1 умножителей (9) и блоков вычисления параметризированной функции f (10) с параметрами Λmk, а также M+K элементов задержки (12), вычислитель амплитуды входного сигнала (11) и сумматор (13).
В блоке расчета параметров функции предыскажений (5) вычисляют многомерный набор параметров Λmk для параметризированных функций f (10) в блоке (7).
Краткое описание чертежей
На фигуре Фиг. 1 показана функциональная схема устройства, осуществляющего способ повышения линейности высокочастотных усилителей мощности.
На фигуре Фиг. 2 приведен пример схемы вычисления сигнала искажений для УМ, не имеющего эффекта памяти.
На фигуре Фиг. 3 представлен пример функциональной схемы, осуществляющей вычисления искажений УМ с эффектом памяти.
Осуществление изобретения
Изобретение может быть осуществлено в соответствии со схемой, представленной на фигуре Фиг. 1. Операции преобразования сигналов в соответствии с представленным способом могут быть выполнены на радиочастоте, на промежуточной частоте, или в основной полосе (baseband). На фигуре Фиг. 1 цепи, необходимые для переноса сигналов в соответствующий диапазон частот не показаны, но предполагается их использование при необходимости. Функциональные операции с сигналами в блоке расчета параметров функций предыскажений (5) и блока функции предыскажений (7) выполняют в цифровом виде, однако другие части устройства могут быть выполнены как в цифровом, так и в аналоговом виде, поэтому в описании вариантов осуществления способа и устройства явно не указываются операции аналогово-цифрового и цифро-аналогового предобразования, но предполагается их использование там, где это необходимо в зависимости от конкретного исполнения.
Примерами осуществления процедуры выравнивания амплитуд, фаз и задержек входного и выходного сигнала в контуре регулирования (3) могут быть устройства автоматической регулировки усиления, фазовой автоподстройки частоты и регулируемые линии задержки, а также имеется возможность их осуществления в цифровом виде, например, через операции взаимного нормирования амплитуды сигналов и поиска задержки корреляционным методом.
Блок функции предыскажений (7) может быть выполнен, например (но не ограничиваясь), на основе программируемой логической интегральной схеме (ПЛИС), компьютера, цифрового сигнального процессора (DSP-процессора) и прочих вычислительных устройств.
Для УМ без эффекта памяти блок функции предыскажений (7) содержит умножитель (9), блок вычисления параметризированной функции f (10) с параметрами Λ, и вычислитель модуля входного сигнала (11) (см. фигуру Фиг. 2) и реализует выражение (12).
Для УМ с эффектом памяти на фигуре Фиг. 3 приведен пример схемы вычисления выражения (13). При этом блок функции предыскажений (7) содержит M+1 умноженное на K+1 умножителей (9) и блоков вычисления параметризированной функции f (10) с параметрами Λmk, M+K - элементов задержки (12), вычислитель модуля входного сигнала (11) и сумматор (13). Сформированный блоке функции предыскажений (7) компенсирующий сигнал вычитается в первом сумматоре (1) из входного сигнала устройства в соответствии с выражением (9). В результате на выходе УМ формируется сигнал в соответствии с выражением (10). При этом уровень остаточных искажений уменьшается по квадратичной зависимости по отношению к исходному значению.
Блок вычисления параметризованной функции f (10) может быть реализован различными способами, например (но не ограничиваясь), как таблица поиска с интерполяцией степени p, или как вычисление полинома степени q. В случае таблицы поиска, вектор параметров Λ представляет собой вектор длиной L+1, элементы которого являются значениями функции f в L+1 точках аргумента функции f, обычно (но не всегда) равномерно распределённых по области определения функции f. В случае полинома степени q, вектор параметров Λ представляет собой вектор длиной q+1, элементы которого являются коэффициентами при соответствующих степенях входного аргумента функции f.
Блок расчета параметров функции предыскажений (5) содержит вычислитель, который может быть выполнен, например (но не ограничиваясь), на основе ПЛИС, компьютера, DSP-процессора и др. вычислительных устройств.
Одним из способов расчета параметров вектора Λ является метод линейной регрессии. Для этого выражение (12) можно представить в матричной форме как
un = AΛ, (14)
где un = [un(0) un(1) … un(N-1)]T - вектор-столбец отсчётов искажений длиной N;
A - матрица входных сигналов размером N на длину вектора Λ.
Матрица A формируется из элементов вектора отсчётов входного сигнала xin = [xin(0) xin(1) … xin(N-1)]T и нулей. Точный вид матрицы A зависит от способа вычисления функции f.
Например, для функции f, заданной как таблица поиска с интерполяцией степени ноль, вектор Λ = [λ0) λ(1) … λ(L)]T и n-тая строка матрицы A имеет вид an = [an(0) an(1) … an (L)]. В этом случае все элементы строки an равны нулю, кроме элемента
 , (15)
, (15)
где in - индекс ближайшей к |xin (n)| точки.
Выражение (14) так же можно использовать для модели с памятью (13), для этого необходимо из многомерного набора векторов параметров Λmk сформировать один вектор Λ, расположив вектора Λmk, например, по столбцам:
Λ = [Λ00 Λ10 … ΛM-1,0 Λ01 Λ11 … ΛM-1,1 …ΛM-1,K-1] T. (16)
Соответствующим образом можно сформировать строку an матрицы A из подстрок.
Таким образом, решая матричное уравнение (14), находят вектор параметров Λ. Одними из возможных способов решения (14) является метод наименьших квадратов (МНК).
Другими возможными вариантами расчёта параметров Λ является расчёт методами Least mean squares (LMS) или Recursive least squares (RLS), известными из теории адаптивной фильтрации (Simon Haykin: Adaptive Filter Theory, 5th edition, International Edition, Pearson Education, 2014, страницы 266-332 и страницы 449-473).
Полученные параметры Λ через замкнутый ключ (6) передают в блок функции предыскажений (7).
Одним из вариантов работы блока расчета параметров функции (5) является итеративное обновление параметров для отслеживания изменений параметров УМ со временем. В этом случае первоначальные значения вектора параметров Λ(0) устанавливаются равными нулю или другим предопределённым значениям и через замкнутый ключ (6) передают в блок функции предыскажений (7). Затем на каждой i-ой итерации (начиная с 1) производятся следующие действия:
1. Из отсчётов сигналов, поступающих на вход блока расчета параметров функции (5), вычисляется вектор Λ одним из описанных выше способов.
2. Обновляется текущий вектор параметров Λ(i) = Λ(i - 1) + Λ.
3. Полученный текущий вектор параметров Λ(i) через замкнутый ключ (6) передается в блок функции предыскажений (7).

Изобретение относится к области радиотехники и может быть применено в радиопередающих устройствах для создания усилителей мощности с низким уровнем внеполосных излучений, используемых в радиосвязи и телерадиовещании. Технический результат заключается в снижении уровня остаточных искажений на выходе усилителя мощности. Для этого путем вычитания входного сигнала из выходного выделяют сигнал искажений и определяют функциональную зависимость этих искажений от входного сигнала. Используя эту функциональную зависимость в виде отдельной функции предыскажений, синтезируют компенсирующий сигнал, который подмешивают на вход усилителя мощности. В качестве функций предыскажений может быть использована таблица поиска (LUT). Устройство содержит контур регулирования (3) для взаимного выравнивание амплитуд и фаз входного и выходного сигналов, сумматор (4) для выделения сигнала искажений, блок расчета параметров функции предыскажений (5), ключ (6), блок функции предыскажений (7), на выходе которого синтезируется компенсирующий сигнал, который после выравнивания фазы (в блоке 8) поступает на вход усилителя мощности (2), тем самым компенсируя его искажения. Для усилителей мощности с эффектом памяти расчет параметров функции предыскажений производят на всем интервале памяти. 2 н. и 4 з.п. ф-лы, 3 ил.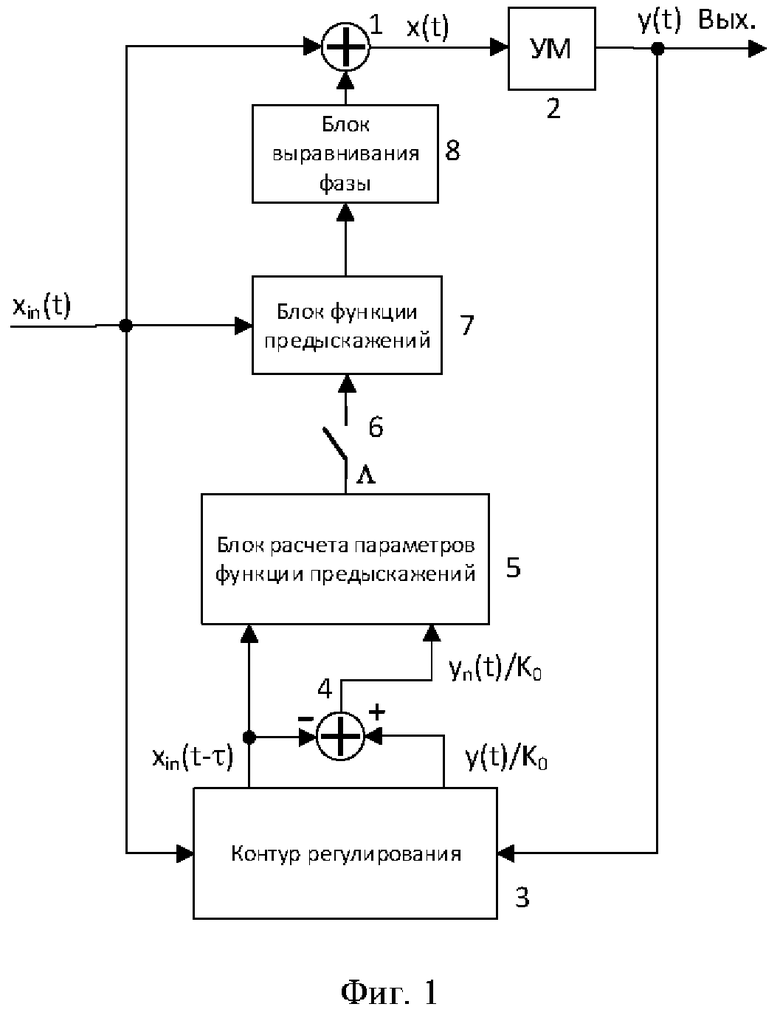
1. Способ повышения линейности высокочастотного усилителя мощности включает процесс выделения искажений усилителя мощности путем вычитания входного сигнала из выходного после их выравнивания по амплитудам, фазам и задержкам, содержит процесс формирования компенсирующего сигнала, соответствующего выделенным искажениям, и его подмешивания в противофазе к входному сигналу усилителя мощности, отличающийся тем, что после выделения искажений, наблюдая входной сигнал и искажения, аппроксимируют функциональную зависимость искажений от входного сигнала в виде произведения входного сигнала на параметризированную функцию от амплитуды входного сигнала, выделяют эту функциональную зависимость в виде отдельной функции предыскажений и, используя в качестве аргумента этой функции входной сигнал, синтезируют компенсирующий сигнал.
2. Способ повышения линейности высокочастотного усилителя мощности по п. 1, в котором при компенсации искажений в усилителе мощности с эффектом памяти аппроксимируют функциональную зависимость искажений от входного сигнала в виде суммы произведений задержанного входного сигнала на параметризированную функцию от задержанной амплитуды входного сигнала для всех комбинаций задержек входного сигнала и задержек амплитуды входного сигнала на интервале памяти усилителя мощности.
3. Способ повышения линейности высокочастотного усилителя мощности по п. 1 или 2, в котором параметризованная функция реализована как таблица поиска с интерполяцией степени p, содержащая параметры, проиндексированные с использованием амплитуды входного сигнала.
4. Устройство для осуществления способа по п. 1 содержит как минимум последовательно включенные первый сумматор и высокочастотный усилитель мощности, при этом вход первого сумматора является входом устройства, а выход усилителя мощности - выходом устройства, устройство также содержит контур регулирования для взаимного выравнивания амплитуд, фаз и задержки входного и выходного сигналов, при этом один вход контура регулирования подключен к выходу устройства, а другой - ко входу устройства, также устройство содержит второй сумматор, вычитающий вход которого подключен к первому выходу контура регулирования, а другой вход сумматора подключен ко второму выходу контура регулирования, при этом соответственно на первом и втором выходах контура регулирования формируется входной и выходной сигналы усилителя мощности, сбалансированные по амплитуде, фазе и задержке, отличающееся тем, что в устройство дополнительно введены блок расчета параметров функции предыскажений, и последовательно включенные блок функции предыскажений и блок выравнивания фазы, при этом выход блока выравнивания фазы подключен к второму входу первого сумматора, второй вход блока функции предыскажений подключен ко входу устройства, первый вход блока расчета параметров функции предыскажений подключен к первому выходу контура регулирования, а второй вход - к выходу второго сумматора, при этом выход блока расчета параметров функции предыскажений соединен с первым входом блока функции предыскажений непосредственно, тем самым функция предыскажений обновляется непрерывно, или они соединены через ключ, тем самым функция предыскажений обновляется при замыкании ключа, и второй вход блока функции предыскажений соединен со входом устройства.
5. Устройство по п. 4, в котором блок функции предыскажений содержит соединенные последовательно вычислитель амплитуды сигнала, блок вычисления параметризированной функции и умножитель, выход умножителя является выходом блока функции предыскажений, а второй вход умножителя соединен со входом вычислителя амплитуды сигнала и является вторым входом блока функции предыскажений, при этом первым входом блока функции предыскажений является второй вход блока вычисления параметризированной функции.
6. Устройство по п. 4, в котором при компенсации искажений в усилителе мощности с эффектом памяти в блоке функции предыскажений вычисляют функциональную зависимость искажений от входного сигнала в виде суммы произведений задержанного входного сигнала на параметризированную функцию от задержанной амплитуды входного сигнала для всех комбинаций задержек входного сигнала и задержек амплитуды входного сигнала на интервале памяти усилителя мощности, при этом блок функции предыскажений содержит M+1, умноженное на K+1 умножителей и блоков вычисления параметризированной функции с параметрами Λmk, а также M+K элементов задержки, вычислитель амплитуды входного сигнала и сумматор, где M и K - глубина памяти по входному сигналу и его амплитуде соответственно, в блоке расчета параметров функции предыскажений вычисляют многомерный набор параметров Λmk для параметризированных функций в блоке функции предыскажений.
| Радиопередающее устройство с цифровой коррекцией нелинейности | 2019 |
|
RU2731135C1 |
| РАДИОЧАСТОТНЫЕ УСИЛИТЕЛИ МОЩНОСТИ | 2007 |
|
RU2434317C2 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ХАРАКТЕРИСТИК СВЧ УСИЛИТЕЛЯ (ВАРИАНТЫ) | 2011 |
|
RU2487464C2 |
| УСТРОЙСТВО ЛИНЕАРИЗАЦИИ ДЛЯ УСИЛИТЕЛЯ С ПЕРЕМЕННЫМ УСИЛЕНИЕМ | 2001 |
|
RU2273949C2 |
| ВЫСОКОЧАСТОТНЫЙ ШИРОКОПОЛОСНЫЙ ДВУХТАКТНЫЙ УСИЛИТЕЛЬ МОЩНОСТИ | 1999 |
|
RU2157585C1 |
| US 8774314 B2, 08.07.2014 | |||
| US 7023273 B2, 04.04.2006. | |||

