Изобретение относится к области радиотехники, в частности к технике усиления и передачи радиосигналов и может быть использовано для создания перспективных программно-определяемых радиопередающих устройств. Устройство позволяет минимизировать амплитудные и фазовые искажения передаваемого сигнала в условиях быстроизменяющейся и априорно неопределённой нелинейности передаточной характеристики радиотракта.
Наиболее распространенной причиной сигнальных искажений является нелинейность аналогового тракта радиопередатчика. Основным источником нелинейности, как правило, является усилитель мощности. В настоящее время уменьшение нелинейных искажений радиопередающих устройств, как правило, достигается введением в передающий тракт цифрового корректирующего нелинейного элемента, передаточная функция которого является обратной передаточной функции аналогового тракта. В результате их взаимодействия характеристика передатчика становится линейной.
Такие передатчики описаны, например, в книгах «High-linearity RF amplifier design.», Norwood: Artech House, 2000. 531 pp. автора Kenington P.B., и «Distortion in RF Power Amplifier», Artech House, 2003. 272 pp. авторов Vuolevi J. и Rahkonen T.
Сущность таких устройств заключается в цифро-аналоговом преобразовании сигнала синтезированного с помощью алгоритмов цифровой обработки сигналов с предварительно введенными искажениями, который поступает на преобразователь частоты, усиливается и передается в эфир с помощью антенно-фидерных устройств.
Известно множество устройств и способов линеаризации аналогового тракта отечественных и зарубежных авторов, основанных на применении алгоритмов адаптации параметров корректирующего нелинейного элемента, например, предложенные в патентах RU 2676017, H03F 1/32, H04B 7/005 и US 9749161, H04B 1/62. Алгоритмы адаптации подразумевают итерационный подбор параметров заранее определенной модели нелинейности.
Основным недостатком устройств, реализующих алгоритмы адаптации, является зависимость эффективности линеаризации от времени сходимости алгоритма. В свою очередь, время сходимости и эффективность алгоритма адаптации зависит от реализации корректируемого нелинейного элемента. Кроме того, адаптация подразумевает постоянное вычисление и хранение таблиц данных, что требует большого количества аппаратных ресурсов, которое зависит также от разрядности выходного сигнала.
В существующих аналогах не уделяется внимание применимости методов адаптации к передаваемым сигналам. В частности, к проблемам адаптации по сигналам с высоким пик-фактором и при работе передатчика в режимах с пакетной передачей данных, в случае, если время сходимости алгоритма превышает длительность пакета.
Наиболее близким по технической сущности к предлагаемому является радиопередающее устройство с адаптивной компенсацией амплитудных и фазовых искажений, описанное в патенте RU 2630387, H04B 1/00, принятое за прототип.
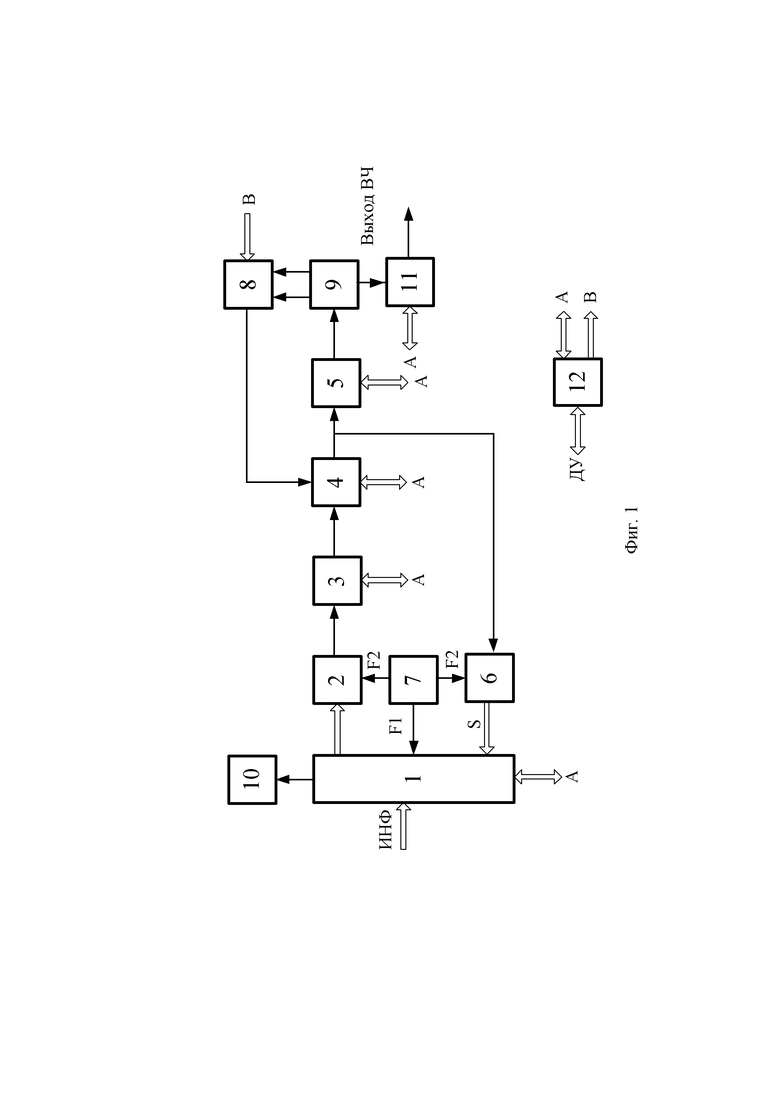
На фиг. 1 представлена функциональная схема устройства-прототипа, где обозначено:
1 – цифровой блок;
2 – цифровой повышающий преобразователь частоты;
3 – селективный усилитель;
4 – усилитель мощности;
5 – фильтр гармоник;
6 – понижающий преобразователь частоты;
7 – блок опорных частот;
8 – двухканальный усилитель сигналов ошибки;
9 – датчик контроля мощности;
10 – устройство с быстродействующей энергонезависимой памятью;
11 – антенно-согласующее устройство;
12 – контроллер местного и дистанционного управления (ДУ).
Устройство-прототип содержит цифровой блок 1, состоящий из цифрового сигнального процессора и программируемой логической интегральной схемы (на фиг. 1 не показаны), аналоговые входы которого являются входами информационных сигналов (ИНФ). Выход цифрового блока 1 соединен с входом цифрового повышающего преобразователя частоты 2 цифровым портом. Выход повышающего преобразователя частоты 2 через последовательно соединенные селективный усилитель 3, усилитель мощности 4, фильтр гармоник 5 и датчик контроля мощности 9 соединен с входом антенно-согласующего устройства 11, один выход которого является выходом сигналов высокой частоты, а его вход-вход цифровым портом А подключен к соответствующим входам-выходам А цифрового блока 1, селективного усилителя 3, усилителя мощности 4, фильтра гармоник 5 и контроллера местного и дистанционного управления 12, выход-вход которого цифровым портом В подключен к двухканальному усилителю сигналов ошибки 8, выход которого соединен с другим входом усилителя мощности 4. Два входа усилителя ошибки 8 подсоединены к соответствующим выходам датчика контроля мощности 9. Выход-вход ДУ контроллера местного и дистанционного управления 12 подключен цифровыми портами последовательного и параллельного интерфейсов к клеммам ДУ. Кроме того, выходы блока опорных частот 7 соединены с соответствующими входами повышающего преобразователя частоты 2, понижающего преобразователя частоты 6 и цифрового блока 1. Причем понижающий преобразователь частоты 6 подключен аналоговым входом к выходу усилителя мощности 4 и цифровым портом S – к цифровому блоку 1, другой выход которого соединен с входом устройства с быстродействующей энергонезависимой памятью 10.
Устройство-прототип работает следующим образом.
Первоначальная калибровка осуществляется методом анализа нелинейной передаточной характеристики радиопередатчика. Для этого цифровой блок 1 формирует цифровой комплексный двухтоновый сигнал, поступающий на вход повышающего преобразователя 2, далее пройдя через ВЧ-тракт, аналоговый сигнал попадает на вход понижающего преобразователя частоты 6, на цифровом выходе которого формируется цифровой сигнал в комплексном виде, далее цифровой сигнал поступает на цифровой блок 1, где происходит определение временной задержки между исходящим и входящим сигналами в реальном времени с помощью алгоритма взаимной корреляции сигналов. Совмещенные во времени комплексные сигналы преобразуются в значения модуля и фазы, далее с помощью алгоритма кусочно-линейной аппроксимации с минимизацией среднеквадратичной ошибки вычисляются опорные точки, представляющие функцию зависимости уровня искажения модуля сигнала от уровня амплитуды входного сигнала и уровня искажения фазы от уровня амплитуды сигнала. Полученные опорные точки преобразуются в комплексные коэффициенты умножения, на основе которых формируются корректирующие таблицы умножения, адресуемые по модулю входного сигнала и представленные в цифровом блоке 1 в виде блочной распределенной памяти ПЛИС, а также дублируются в устройстве с быстродействующей энергонезависимой памятью 10. За счет этого в случае выключения устройства, корректирующие таблицы умножения сохраняются в памяти и не требуют дальнейшей калибровки.
После калибровки устройство работает в штатном режиме: на информационный вход цифрового блока 1 поступает сигнал, далее вычисляется модуль сигнала, в соответствии со значением модуля сигнала из блочной памяти выбирается ячейка с комплексным коэффициентом умножения и происходит комплексное перемножение сигнала на этот коэффициент, за счет этого одновременно корректируются амплитуда и фаза сигнала в зависимости от модуля входного сигнала. Далее происходит измерение разности сигналов, поступающих с информационного входа и с цифрового входа понижающего преобразователя частоты 6 для определения сигнала ошибки. Алгоритм адаптации обеспечивает постоянное обновление комплексных коэффициентов умножения с учетом величины сигнала ошибки.
Основным недостатком устройства-прототипа является длительность первоначальной калибровки устройства, которая определяется длительностью анализа нелинейной передаточной характеристики усилителя мощности, а также длительностью вычисления комплексных коэффициентов умножения. Помимо этого, устройство-прототип содержит недостатки свойственные алгоритмам адаптации, а именно:
- требование наличия известной модели корректируемой нелинейной передаточной характеристики, т.е. алгоритм адаптации работает в режиме уточнения заранее определенной передаточной характеристики;
- вероятность сходимости алгоритма в локальных минимумах, что приводит к улучшению линейности на ограниченном участке входных амплитуд и её значительному ухудшению на остальных участках передаточной характеристики;
- невозможность корректной работы с нелинейными характеристиками в случае, если интервал стационарности нелинейности меньше чем время выполнения алгоритма адаптации;
- требование к выравниванию времени и амплитуды для анализа выходного и входного сигналов.
Перечень фигур: фиг. 1 – функциональная схема устройства-прототипа; фиг. 2 – схема заявляемого устройства; фиг. 3 – схема цифрового корректора нелинейности; фиг. 4 – иллюстрация принципа действия цифрового корректора нелинейности; фиг. 5 – пример коррекции нелинейных искажений усилителя КВ диапазона мощностью 1000 Вт.
Задачей предлагаемого технического решения является уменьшение амплитудных и фазовых искажений передаваемого сигнала путем реализации устройства, содержащего измерительную систему определения параметров цифрового корректора и вычислитель отсчетов предыскаженного сигнала в реальном времени.
Для решения поставленной задачи в радиопередающем устройстве с цифровой коррекцией нелинейности, содержащем цифровое устройство, выход которого цифровым портом соединен с входом цифрового повышающего преобразователя частоты, выход которого через последовательно соединенные селективный усилитель и усилитель мощности подключен к входу фильтра гармоник, при этом выход усилителя мощности через понижающий преобразователь частоты цифровым портом соединен со вторым входом цифрового устройства, первый вход которого является входом информационных сигналов, согласно изобретению, цифровое устройство содержит устройство управления и формирования сигналов, выход которого цифровым портом соединен с входом цифрового корректора нелинейности, выход которого является выходом цифрового устройства, второй выход устройства управления и формирования сигналов подключен ко второму входу измерителя комбинационных составляющих, первый вход которого является цифровым входом цифрового устройства, причем выход измерителя комбинационных составляющих соединен со вторым входом цифрового корректора нелинейности, который состоит из последовательно соединенных первого комплексного смесителя, корректирующего нелинейного элемента, второго комплексного смесителя, цифрового фильтра и блока нормализации апертуры, выход которого является выходом цифрового корректора нелинейности, а вход первого комплексного смесителя – его первым входом, при этом второй вход корректирующего нелинейного элемента является вторым входом цифрового корректора нелинейности, который проводит вычисление комплексного выходного сигнала siout, sqout путем преобразования входного комплексного сигнала si, sq по формуле
где: n – порядок корректирующего нелинейного элемента 17;
ai – уровень комбинационной составляющей порядка i, измеренный относительно уровня тона измерительного сигнала;
φi – сдвиг фазы комбинационной составляющей порядка i измеренный относительно фазы тона измерительного сигнала и повернутый на 180°;
Ei(s) – Е-полином порядка i, который определяется согласно формуле

где 
и блок нормализации апертур 20 работает в соответствие с формулой
где: 


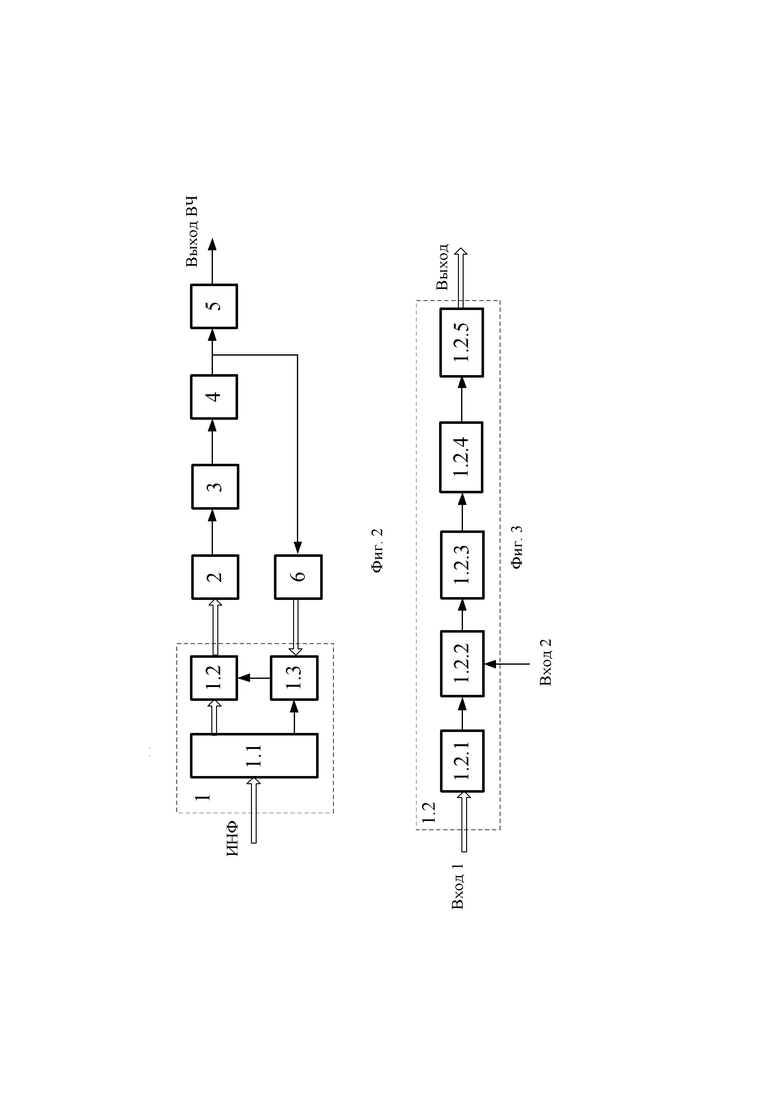
Функциональная схема заявляемого устройства представлена на фиг. 2, где обозначено:
1 – цифровое устройство;
1.1 – устройство управления и формирования сигналов;
1.2 – цифровой корректор нелинейности;
1.3 – измеритель комбинационных составляющих;
2 – цифровой повышающий преобразователь частоты;
3 – селективный усилитель;
4 – усилитель мощности;
5 – фильтр гармоник;
6 – понижающий преобразователь частоты.
Предлагаемое устройство содержит последовательно соединенные цифровое устройство 1, цифровой повышающий преобразователь частоты 2, селективный усилитель 3, усилитель мощности 4 и фильтр гармоник 5, выход которого является выходом ВЧ радиопередающего устройства. При этом выход усилителя мощности 4 через понижающий преобразователь частоты 6 цифровым портом соединен с входом цифрового устройства 1, которое состоит из устройства управления и формирования сигналов 1.1, первый выход которого цифровым портом соединен с первым входом цифрового корректора нелинейности 1.2, выход которого является цифровым выходом цифрового устройства 1, и измерителя комбинационных составляющих 1.3, первый цифровой вход которого подсоединен ко второму выходу устройства управления и формирования сигналов 1.1, второй вход измерителя комбинационных составляющих 1.3 является цифровым входом цифрового устройства 1, а выход измерителя комбинационных составляющих 1.3 соединен со вторым входом цифрового корректора нелинейности 1.2.
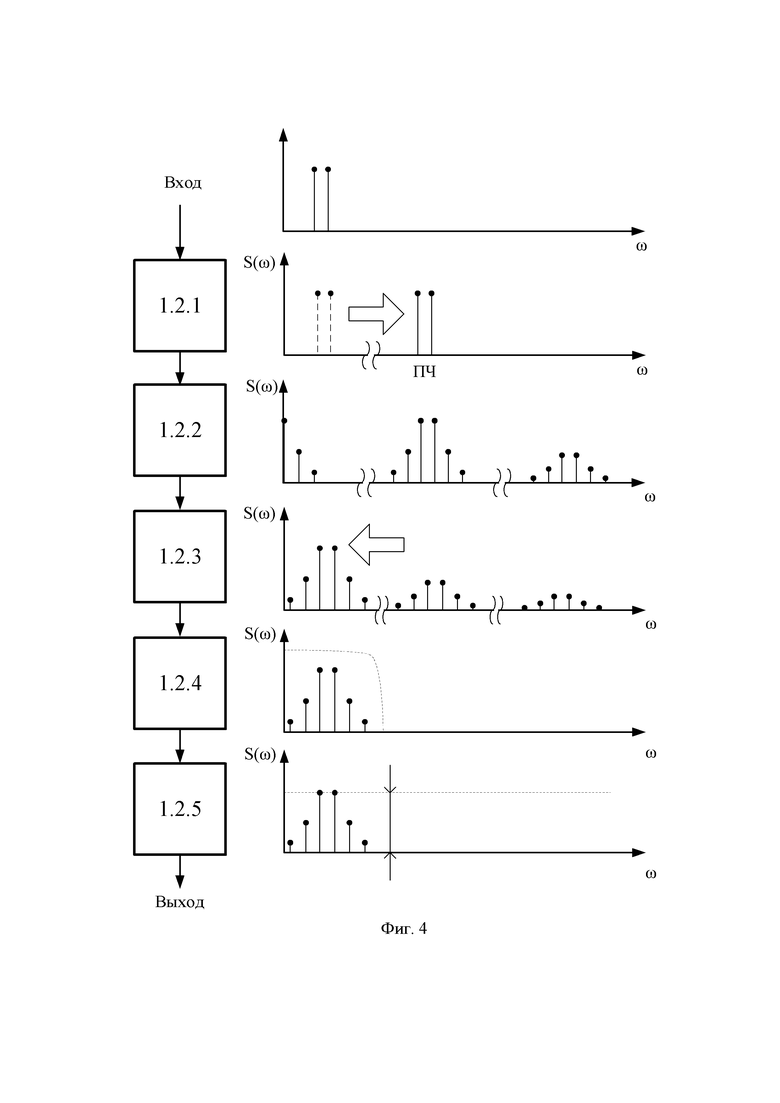
На фиг. 3 приведена структурная схема цифрового корректора нелинейности 1.2, где обозначено:
1.2.1 – первый комплексный смеситель;
1.2.2 – корректирующий нелинейный элемент;
1.2.3 – второй комплексный смеситель;
1.2.4 – цифровой фильтр;
1.2.5 – блок нормализации апертуры.
Цифровой корректор нелинейности 1.2 содержит последовательно соединенные первый комплексный смеситель 1.2.1, корректирующий нелинейный элемент 1.2.2, второй комплексный смеситель 1.2.3, цифровой фильтр 1.2.4 и блок нормализации апертуры 1.2.5, выход которого является выходом цифрового корректора нелинейности 1.2. Вход первого комплексного смесителя 1.2.1 является первым входом цифрового корректора нелинейности 1.2, второй вход корректирующего нелинейного элемента 1.2.2 – вторым входом цифрового корректора нелинейности 1.2.
Во всех блоках 1.1, 1.2.1-1.2.5, 1.3, 2, 6 имеются стандартные тактовые входы (на фиг. 2, 3 не показаны), на которые подаются сигналы, обеспечивающие синхронизацию работы устройства в целом от единого источника опорной частоты.
Заявляемое устройство работает следующим образом.
Измерительный двухтоновый сигнал с небольшим частотным разносом и равной амплитудой тонов, сформированный в устройстве управления и формирования сигналов 1.1 входящем в состав цифрового устройства 1, через цифровой корректор нелинейности 1.2 с нулевыми коэффициентами поступает на вход повышающего преобразователя частоты 2, где после цифро-аналогового преобразования подается на вход селективного усилителя 3, а затем на вход усилителя мощности 4, где претерпевает нелинейные амплитудные и фазовые искажения. С выхода усилителя мощности 4 часть сигнала ответвляется на понижающий преобразователь частоты 6, в котором искаженный сигнал преобразуется в цифровую форму и поступает на вход измерителя комбинационных составляющих 1.3, где происходит вычисление спектра Фурье и проводится измерение относительных значений амплитуд и фаз комбинационных составляющих двухтонового сигнала в окрестности его центральной частоты. За счет единого источника опорной частоты для вычисления спектра Фурье достаточно одного периода огибающей двухтонового измерительного сигнала. Полученные относительные значения амплитуд и фаз, повернутые на 180°, поступают в цифровой корректор нелинейности 1.2 и тут же применяются в качестве его параметров, что возможно благодаря реализации корректирующего нелинейного элемента 1.2.2 в виде взвешенной суммы Е-полиномов [2].
Принцип действия цифрового корректора нелинейности 1.2 после измерения параметров поясняется на фиг. 4 на примере предыскажения спектра двухтонового сигнала. Поступающие на вход цифрового корректора нелинейности 1.2 сигналы претерпевают амплитудные и фазовые предыскажения следующим образом: входной сигнал поступает на первый комплексный смеситель 1.2.1 (фиг. 3), который переносит входной сигнал на промежуточную частоту. Промежуточная частота выбирается таким образом, чтобы при внесении предварительных искажений корректирующим нелинейным элементом 1.2.2 синтезированные частотные компоненты помимо комбинационных составляющих в окрестности передаваемого сигнала не сворачивались в полосу передаваемого сигнала. После ввода предыскажений сигнал с выхода корректирующего нелинейного элемента 1.2.2 подвергается обратному переносу частоты с помощью второго комплексного смесителя 1.2.3 и фильтруется цифровым фильтром 1.2.4 для исключения частотных компонент вне полосы коррекции передаваемого сигнала. Отфильтрованный предыскаженый сигнал поступает на блок нормализации апертуры 1.2.5, который предназначен для приведения амплитуды скорректированного сигнала к изначальному уровню.
Корректирующий нелинейный элемент 1.2.2 представляет собой комплексную передаточную характеристику, реализованную как сумма Е-полиномов, взвешенная комплексными коэффициентами, которые представляют собой амплитуды и фазы комбинационных составляющих полученных измерителем 1.3. Зависимость выходного комплексного сигнала цифрового корректора нелинейности siout, sqout от входного si, sq реализуется согласно формуле (1).
где: n – порядок корректирующего нелинейного элемента 17;
ai – уровень комбинационной составляющей порядка i, измеренный относительно уровня тона измерительного сигнала;
φi – сдвиг фазы комбинационной составляющей порядка i измеренный относительно фазы тона измерительного сигнала и повернутый на 180°;
Ei(s) – Е-полином порядка i.
Е-полином порядка i определяется согласно формуле (2).

где
Блок нормализации апертур 20 реализован в соответствие с формулой (3).
где:
В отличие от прототипа предлагаемое устройство позволяет минимизировать время, затрачиваемое на синтез корректирующего нелинейного элемента.
Коррекция искажений проводится путем прямого расчета, что исключает требование к хранению таблиц соответствия входных и выходных амплитуд, как это реализовано в прототипе.
Измерение параметров нелинейной передаточной характеристики на основе данных спектра Фурье снимает требование к выравниванию времени и амплитуды входного и выходного сигналов, причем для получения параметров корректирующего нелинейного элемента 1.2.2 достаточно одного периода огибающей измерительного двухтонового сигнала. Соответственно достаточная длительность излучения измерительного сигнала будет определяться как обратная величина частотного разноса тонов измерительного сигнала. Например, при частотном разносе тонов 1 МГц достаточно длительности излучения измерительного сигнала 1 мкс. Это позволяет встраивать двухтоновый измерительный сигнал в пакет данных в соответствующем режиме работы радиопередающего устройства.
Кроме того, предлагаемый цифровой корректор нелинейности 1.2 требует n+1 параметров, где n – порядок корректирующего полинома, т.е. оперирует гораздо меньшим количество параметров по сравнению с прототипом. На практике для коррекции нелинейных усилителей мощности работающих в энергоэффективном классе АВ достаточно ограничиться 9 порядком корректирующего нелинейного элемента, соответственно, необходимое количество параметров корректора равно 10.
К преимуществам заявляемого устройства стоит отнести аппаратно-эффективную реализацию блока нормализации апертуры сигнала, которая выполняется без необходимости измерения амплитуд входного и выходного сигнала корректирующего нелинейного элемента, так как амплитуда сигнала после коррекции изменяется на известную величину, которая соответствует сумме амплитуд измеренных комбинационных составляющих, при этом комбинационные составляющие и гармоники с большой отстройкой отфильтрованы цифровым фильтром 1.2.4.
Реализация блоков 2 – 6 заявляемого устройства аналогична блокам устройства-прототипа и может быть выполнена, например в соответствии с монографией Пауль Хоровиц и Уинфилд Хилл «Искусство схемотехники» в 2-х томах. Москва Мир 1986г.
Цифровое устройство 1, включающее в себя устройство управления и формирования сигналов 1.1, цифровой корректор нелинейности 1.2 и измеритель комбинационных составляющих 1.3 может быть реализовано программно на аппаратной платформе, представляющей собой цифровой сигнальный процессор в связке с ПЛИС, например TMS320C5509A (Texas Instruments) и XC6SLX150-3FGG484I (Xilinx), либо на системе на кристалле, например, семейства Zynq (Xilinx).
Приведем доказательство эффективности работы заявляемого устройства.
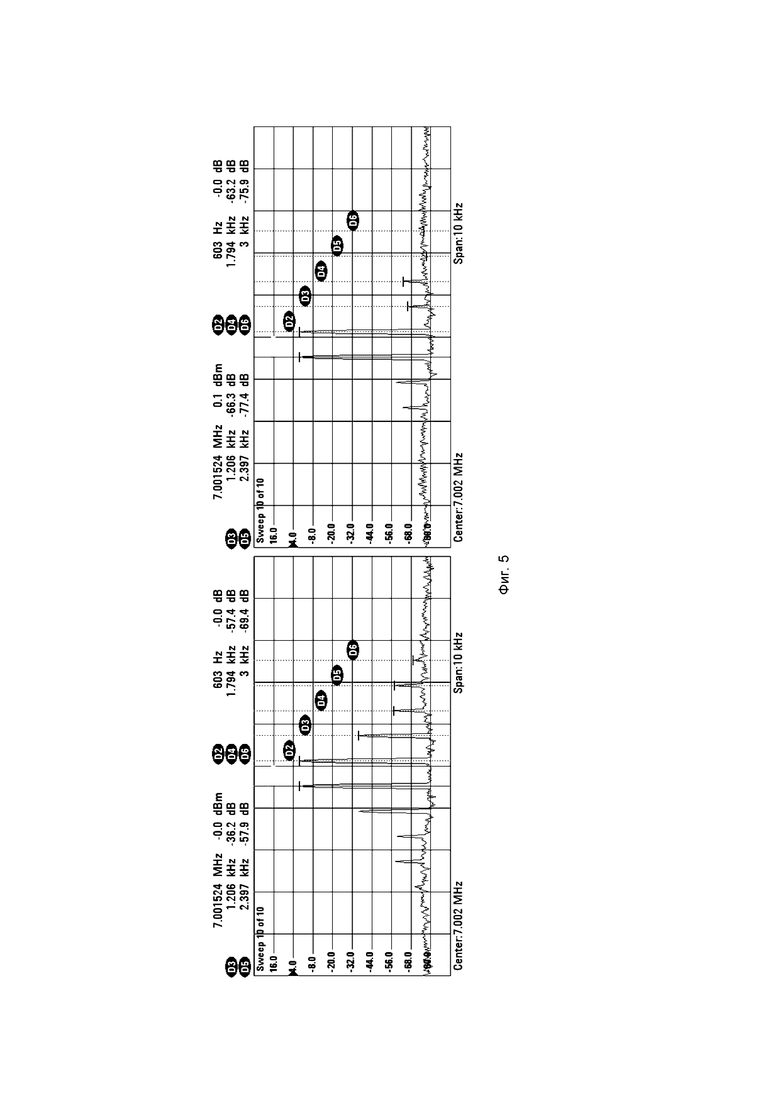
Пример коррекции нелинейных искажений согласно предлагаемому устройству представлен на фиг. 5 в виде спектров двухтонового сигнала до коррекции (а) и после коррекции (б) усилителя КВ диапазона мощностью 1000 Вт. Как видно на представленных спектрах, применение заявляемого устройства позволило уменьшить уровень комбинационных составляющих 3го порядка на выходе УМ на 30 дБ до уровня -66 дБс.
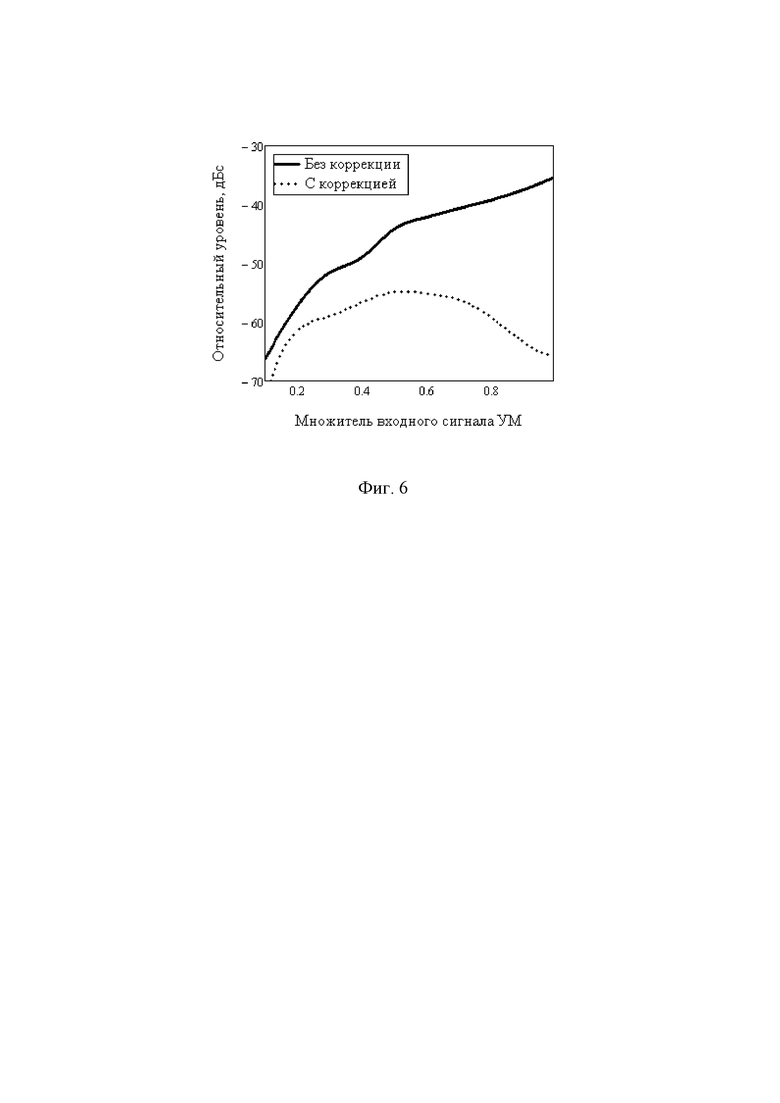
Также в доказательство эффективности и стабильности предложенного устройства на фиг. 6 приведен график зависимости относительного уровня комбинационной составляющей третьего порядка от уровня входного сигнала усилителя мощности. На фиг. 6 кривые не пересекаются, что демонстрирует эффективность предлагаемой реализации цифрового корректора нелинейности при работе на любых участках передаточной характеристики усилителя мощности и не требует итерационного поиска решения, соответственно снимается вопрос стабильности работы корректора и однозначности полученного решения задачи линеаризации, а также исключается требование к пик-фактору корректируемого сигнала.
Таким образом, заявляемое радиопередающее устройство позволяет более эффективно проводить коррекцию амплитудных и фазовых искажений и при этом минимизировать время определения параметров корректора нелинейности и их количество, что позволяет проводить коррекцию в условиях быстроизменяющейся и априорно-неопределенной нелинейности, что особенно критично в режиме пакетной передачи данных.
Литература:
1. Патент №2630387 РФ МПК: H04B 1/38. Радиопередающее утсройство с адаптивной компенсацией амплитудных и фазовых искажений / И.Е. Кащенко, А.В. Богданов – Опубл. 2017, Бюл. 25.
2. Маковий В.А. Спектральный метод синтеза корректирующих нелинейных элементов для передающих трактов / В.А. Маковий, М.А. Евсеев // Радиотехника. –2016. – №5. – C.67-75.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования предварительно искаженного сигнала | 2019 |
|
RU2726184C1 |
| РАДИОПЕРЕДАЮЩЕЕ УСТРОЙСТВО С АДАПТИВНОЙ КОМПЕНСАЦИЕЙ АМПЛИТУДНЫХ И ФАЗОВЫХ ИСКАЖЕНИЙ | 2015 |
|
RU2630387C2 |
| Способ компенсации нелинейных искажений высокочастотных усилителей мощности и устройство для его осуществления | 2021 |
|
RU2786412C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И СПОСОБ ОБРАБОТКИ СИГНАЛОВ | 2010 |
|
RU2510128C1 |
| Устройство и способ адаптивной линеаризации аналогового радиотракта с помощью двухблочного цифрового корректора | 2017 |
|
RU2676017C1 |
| Радиоприемное устройство с цифровой коррекцией нелинейности | 2024 |
|
RU2830857C1 |
| Способ повышения линейности высокочастотных усилителей мощности и устройство для его осуществления | 2020 |
|
RU2761856C1 |
| Способ трансляции информационного узкополосного цифрового мультимедийного радиовещания | 2017 |
|
RU2645155C1 |
| Компактный высокоскоростной радиопередающий комплекс космического аппарата | 2016 |
|
RU2630845C1 |
| Способ линейного усиления сигнала по мощности и устройство для его реализации | 2019 |
|
RU2721935C1 |
Изобретение относится к радиопередающему устройству с цифровой коррекцией нелинейности. Устройство позволяет минимизировать амплитудные и фазовые искажения передаваемого сигнала в условиях быстроизменяющейся и априорно неопределённой нелинейности передаточной характеристики радиотракта. В радиопередающем устройстве цифровое устройство (1) содержит устройство управления и формирования сигналов (1.1), цифровой корректор нелинейности (1.2) и измеритель комбинационных составляющих (1.3). Цифровой корректор нелинейности (1.2) состоит из последовательно соединенных первого комплексного смесителя (1.2.1), корректирующего нелинейного элемента (1.2.2), второго комплексного смесителя (1.2.3), цифрового фильтра (1.2.4) и блока нормализации апертуры (1.2.5), выход которого является выходом цифрового корректора нелинейности (1.2), а вход первого комплексного смесителя – его первым входом. Причем второй вход корректирующего нелинейного элемента (1.2.2) является вторым входом цифрового корректора нелинейности (1.2), который проводит вычисление комплексного выходного сигнала siout, sqout путем преобразования входного комплексного сигнала si, sq. Техническим результаом является уменьшение времени получения предыскаженного сигнала и повышение эффективности корректора нелинейности. 6 ил.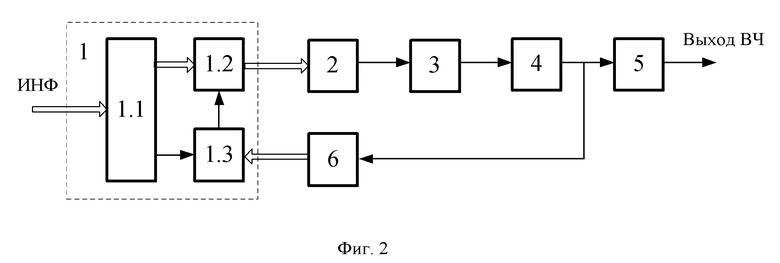
Радиопередающее устройство с цифровой коррекцией нелинейности, содержащее цифровое устройство, выход которого цифровым портом соединен с входом цифрового повышающего преобразователя частоты, выход которого через последовательно соединенные селективный усилитель и усилитель мощности подключен к входу фильтра гармоник, при этом выход усилителя мощности через понижающий преобразователь частоты цифровым портом соединен со вторым входом цифрового устройства, первый вход которого является входом информационных сигналов, отличающееся тем, что цифровое устройство содержит устройство управления и формирования сигналов, выход которого цифровым портом соединен с входом цифрового корректора нелинейности, выход которого является выходом цифрового устройства, второй выход устройства управления и формирования сигналов подключен ко второму входу измерителя комбинационных составляющих, первый вход которого является цифровым входом цифрового устройства, причем выход измерителя комбинационных составляющих соединен со вторым входом цифрового корректора нелинейности, который состоит из последовательно соединенных первого комплексного смесителя, корректирующего нелинейного элемента, второго комплексного смесителя, цифрового фильтра и блока нормализации апертуры, выход которого является выходом цифрового корректора нелинейности, а вход первого комплексного смесителя – его первым входом, при этом второй вход корректирующего нелинейного элемента является вторым входом цифрового корректора нелинейности, который проводит вычисление комплексного выходного сигнала siout, sqout путем преобразования входного комплексного сигнала si, sq по формуле
где n – порядок корректирующего нелинейного элемента 17;
ai – уровень комбинационной составляющей порядка i, измеренный относительно уровня тона измерительного сигнала;
φi – сдвиг фазы комбинационной составляющей порядка i измеренный относительно фазы тона измерительного сигнала и повернутый на 180°;
Ei(s) – Е-полином порядка i, который определяется согласно формуле

где 
и блок нормализации апертур 20 работает в соответствие с формулой
где 


| РАДИОПЕРЕДАЮЩЕЕ УСТРОЙСТВО С АДАПТИВНОЙ КОМПЕНСАЦИЕЙ АМПЛИТУДНЫХ И ФАЗОВЫХ ИСКАЖЕНИЙ | 2015 |
|
RU2630387C2 |
| Устройство и способ адаптивной линеаризации аналогового радиотракта с помощью двухблочного цифрового корректора | 2017 |
|
RU2676017C1 |
| US 7023273 B2, 04.04.2006 | |||
| US 8798562 B2, 05.08.2014 | |||
| Аверина Л.И | |||
| и др | |||
| ЦИФРОВЫЕ КОРРЕКТОРЫ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ЛИНЕАРИЗАЦИИ УСИЛИТЕЛЕЙ МОЩНОСТИ, ВЕСТНИК ВГУ | |||
| СЕРИЯ: ФИЗИКА | |||
| МАТЕМАТИКА | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

