Область техники, к которой относится изобретение
Варианты настоящего изобретения относятся к устройству для обработки медицинских изображений, способу обработки медицинских изображений и программе.
Настоящая заявка претендует на приоритет заявки на выдачу патента Японии No. 2018-075024, которая подана 9 апреля 2018 и содержание которой включено сюда посредством ссылки.
Уровень техники
Был описан обычный способ лучевой терапии путем воздействия излучением на опухоль пациента с целью лечения этого пациента. Потоком излучения необходимо воздействовать точно на место опухоли. Это обусловлено тем, что имеют место случаи, в которых при попадании излучения на нормальные ткани тела пациента, эти нормальные ткани также оказываются затронуты. Соответственно определяют местонахождение опухоли в теле пациента в трехмерной системе координат путем выполнения заранее компьютерной томографии (computed tomography (CT)) и планируют направление облучения и интенсивность облучения таким образом, чтобы уменьшить облучение нормальных тканей. Для лучевой терапии необходимо поместить пациента в заданное положение относительно устройства и затем выровнять это положение пациента относительно устройства (далее, именуется просто положением пациента) на стадии планирования лечения, совместив его с положением пациента во время лечения, поскольку облучающее излучение направлено и облучает пациента в соответствии с планом лечения.
Для выравнивания (совмещения) положения опухоли, кости или другого подобного объекта в теле пациента с положением этого объекта, имевшим место во время планирования лечения, осуществляют сопоставление прозрачного изображения внутренней структуры тела пациента, лежащего на кровати, непосредственно перед лечебной процедурой, и реконструированного цифровым способом рентгеновского изображения (digitally reconstructed radiograph (DRR)), представляющего собой прозрачное изображение, виртуально реконструированное на основе трехмерного изображения, полученного посредством компьютерной томографии (CT-изображения) и захваченного во время планирования лечения, для получения смещения положения пациента между этими изображениями, и затем осуществляют выравнивание и совмещение положения пациента путем перемещения кровати на основе найденной величины смещения. Такое смещение положения пациента получают путем поиска положения CT-изображения, в котором реконструируется DRR-изображение, наиболее сходное с прозрачным изображением. Были предложены несколько способов автоматизации поиска посредством компьютера. Однако пользователь (врач или другой медицинский персонал) в конечном итоге сравнивает прозрачное изображение и указанное DRR-изображение с результатом автоматического поиска с целью убедиться, что величина смещения положения пациента достаточно мала. После выполненной пользователем проверки и подтверждения пользователь осуществляет облучение потоком излучения.
Если опухоль в теле пациента присутствует в органе, который движется в процессе дыхания или сердцебиения пациента, таком как легкие или печень, местонахождение опухоли, подвергаемой облучению, необходимо идентифицировать. Совокупность таких способов идентификации содержит способ непрерывного захвата прозрачных изображений пациента в процессе облучения и отслеживания местонахождения опухоли на этих последовательных прозрачных изображениях, способ косвенной идентификации местонахождения опухоли путем отслеживания местонахождения маркера, помещенного внутрь тела пациента, если опухоль нечетко видна на прозрачном изображении, и другие подобные способы. Совокупность способов облучения содержит способ следящего облучения, согласно которому отслеживают (сопровождают) местонахождение опухоли и облучают ее, и способ «ожидающего» облучения, согласно которому облучение опухоли осуществляется (как бы из «засады») только тогда, когда опухоль достигнет некоторой позиции, задаваемой во время планирования лечения. Эти способы облучения называются способами облучения, синхронизированного с дыханием, поскольку облучение синхронизировано с дыханием пациента.
Имеется также способ получения структуры изображения опухоли заранее и затем поиска подобной структуры изображения в пределах прозрачного изображения, захваченного во время лечения, для идентификации местонахождения опухоли, как в способе отслеживания местонахождения опухоли, захваченной в составе прозрачного изображения. Согласно этому способу, подготавливают изображение, содержащее опухоль, и изображение, не содержащее опухоль, генерируют дискриминатор, который отличает эти изображения одно от другого посредством нейронной сети, и отслеживают местонахождение опухоли с использованием дискриминатора. Однако такой способ вызывает увеличение времени обработки данных, и при этом может быть затруднительно отслеживать местонахождение опухоли, которое необходимо осуществлять в реальном времени, поскольку несколько локальных изображений вырезают из прозрачного изображения с использованием, например, растрового сканирования, и классифицируют эти локальные изображения как «опухоль» или «не опухоль» с использованием дискриминатора.
Список литературы
Патентная литература
Патентная литература 1: Патент США No. 6819790
Краткое изложение существа изобретения
Техническая проблема
Целью настоящего изобретения является создание устройства для обработки медицинских изображений, способа обработки медицинских изображений и программы, которые могут быстро и точно оценивать местонахождение мишени в теле пациента на основе прозрачных изображений пациента в процессе лучевой терапии.
Решение проблемы
Устройство для обработки медицинских изображений согласно одному из аспектов настоящего изобретения содержит модуль получения первых местонахождений, первый преобразователь, генератор первого вероятностного изображения и обучающийся модуль. Модуль получения первых местонахождений конфигурирован для получения, в качестве первых местонахождений, местонахождений мишени в теле пациента в составе нескольких первых изображений, представляющих собой прозрачные изображения для нескольких моментов времени, в которые считывают изображения пациента. Первый преобразователь конфигурирован для преобразования первых местонахождений в составе нескольких первых изображений во вторые местонахождения путем расширения движения во втором направлении, перпендикулярном первому направлению, в котором перемещение первых местонахождений во времени велико. Генератор первого вероятностного изображения конфигурирован для генерации первого вероятностного изображения, показывающего распределение вероятностей, соответствующих вторым местонахождениям, на основе вторых местонахождений. Обучающийся модуль конфигурирован для передачи на выход модели, использующей некоторые или все из совокупности нескольких первых изображений и первое вероятностное изображение в качестве настроечных данных, и после приема части или всего прозрачного изображения модуль формирует второе вероятностное изображение, показывающее распределение вероятности для части или целого прозрачного изображения, соответствующего вторым местонахождениям.
Преимущества изобретения
Согласно рассмотренному выше аспекту можно создать устройство для обработки медицинских изображений, способ обработки медицинских изображений и программу, позволяющие автоматически отслеживать местонахождение опухоли в теле пациента в пределах прозрачного изображения пациента, проходящего лучевую терапию.
Краткое описание чертежей
Фиг. 1 представляет схему конфигурации системы 1 лучевой терапии, содержащей устройство 100 для обработки медицинских изображений согласно первому варианту.
Фиг. 2 представляет блок-схему обучающегося устройства 110 согласно первому варианту.
Фиг. 3 представляет блок-схему устройства 120 для отслеживания движущегося объекта согласно первому варианту.
Фиг. 4 представляет блок-схему устройства 100 для обработки медицинских изображений согласно первому варианту.
Фиг. 5 представляет диаграмму, показывающую пример состояния, в котором первый преобразователь 113 обрабатывает прозрачное изображение (transparent image (TI)).
Фиг. 6 представляет схему, показывающую пример траектории местонахождения мишени (target position TP).
Фиг. 7 представляет диаграмму, показывающую пример первого вероятностного изображения, генерируемого устройством 100 для обработки медицинских изображений.
Фиг. 8 представляет логическую схему, показывающую пример последовательности операций обучающегося устройства 110.
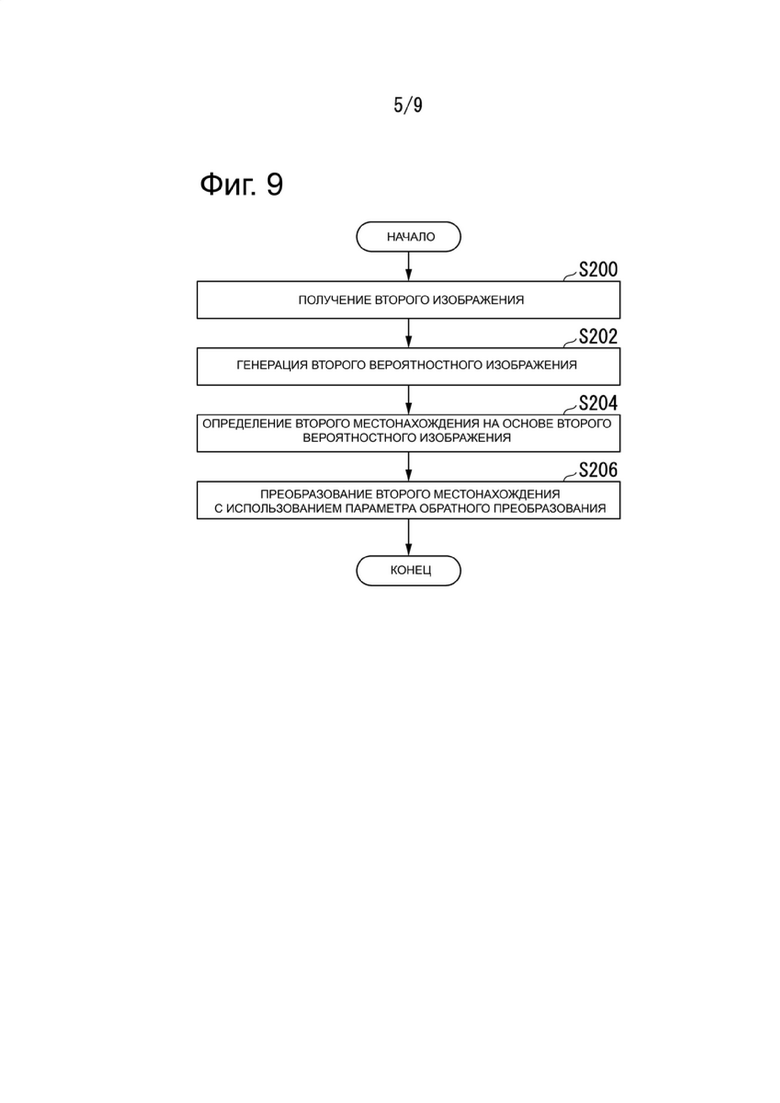
Фиг. 9 представляет логическую схему, показывающую пример последовательности операций устройства 120 для отслеживания движущегося объекта.
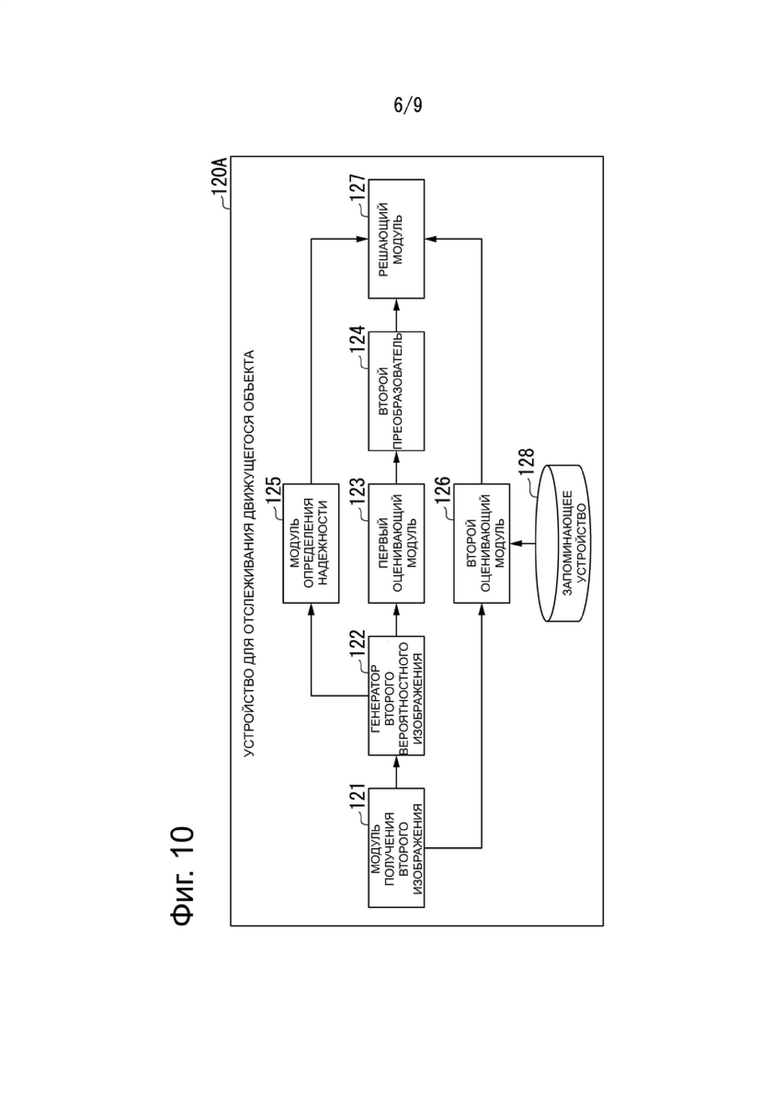
Фиг. 10 представляет блок-схему устройств 120A для отслеживания движущегося объекта согласно второму варианту.
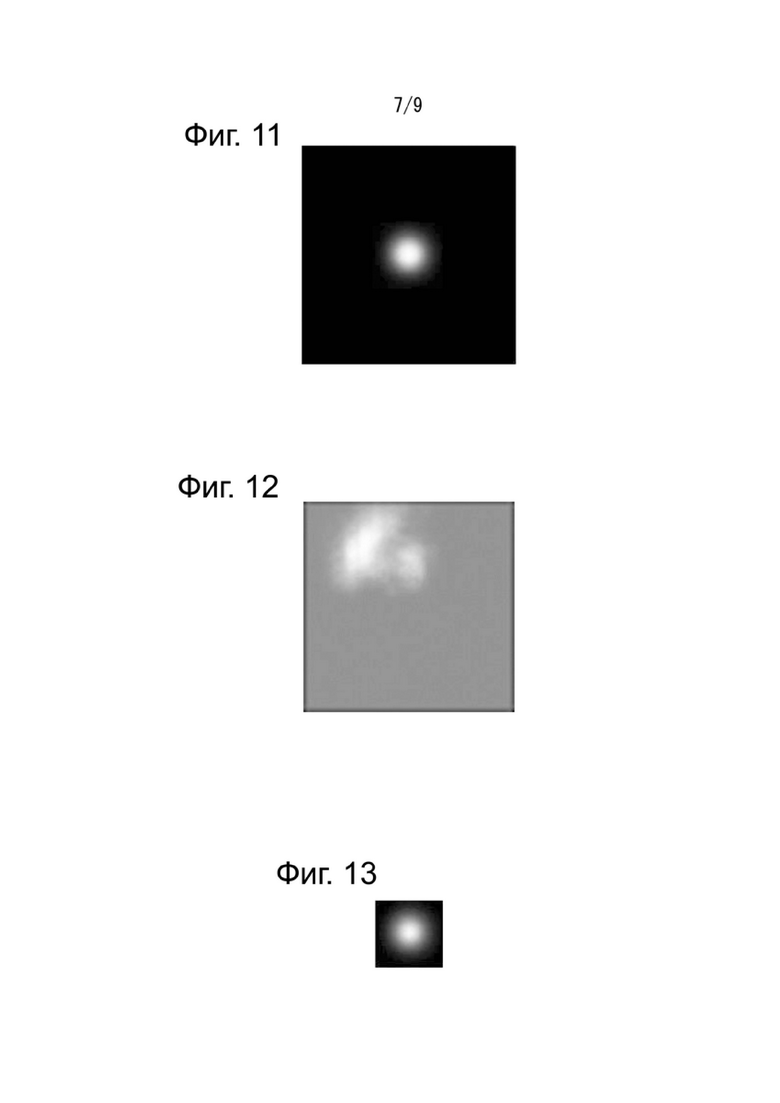
Фиг. 11 представляет диаграмму, показывающую пример второго вероятностного изображения, генерируемого устройством 120A для отслеживания движущегося объекта.
Фиг. 12 представляет диаграмму, показывающую другой пример второго вероятностного изображения, генерируемого устройством 120A для отслеживания движущегося объекта.
Фиг. 13 представляет диаграмму, показывающую пример искусственной вставки в изображение, генерируемой устройством 100A для обработки медицинских изображений.
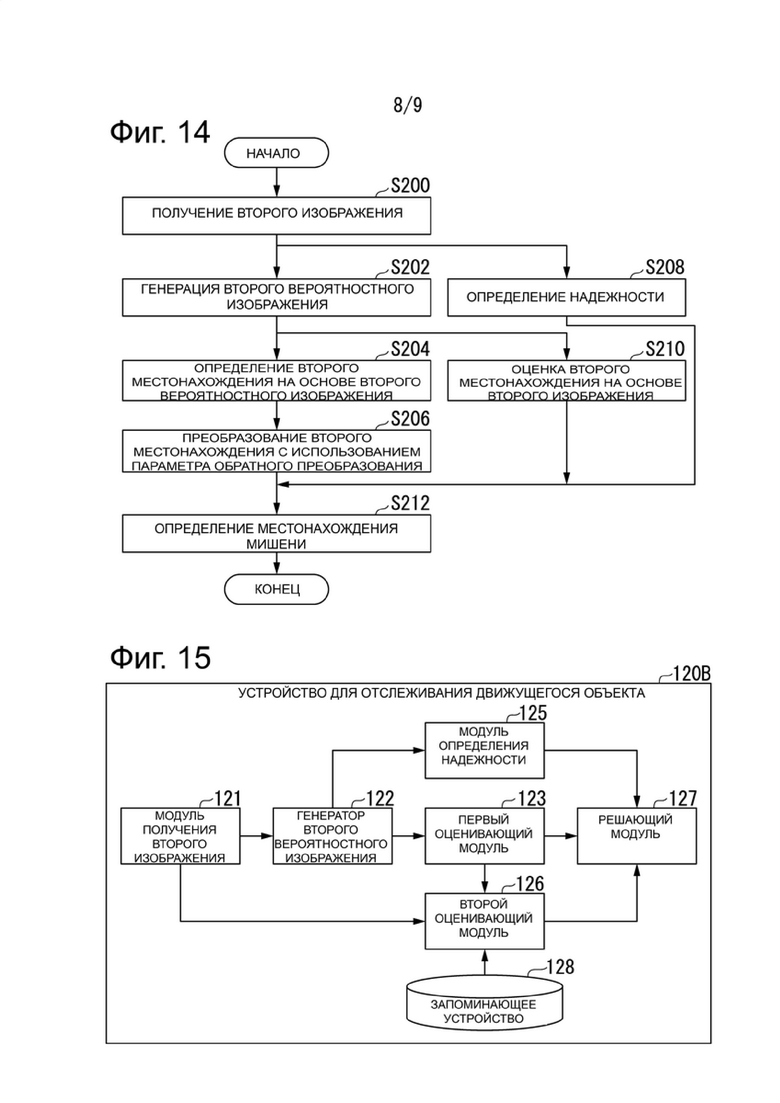
Фиг. 14 представляет логическую схему, показывающую пример последовательности операций устройства 120A для отслеживания движущегося объекта.
Фиг. 15 представляет блок-схему устройства 120B для отслеживания движущегося объекта согласно третьему варианту.
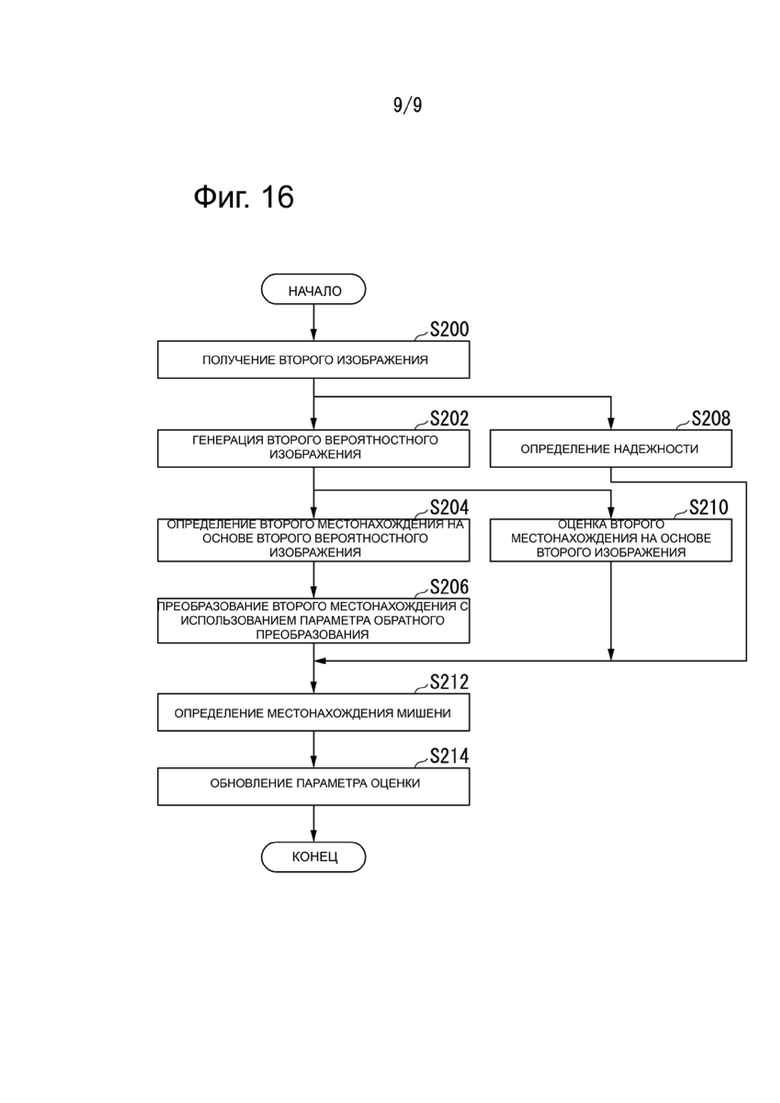
Фиг. 16 представляет логическую схему, показывающую пример последовательности операций устройства 120B для отслеживания движущегося объекта.
Описание вариантов
В дальнейшем, устройство для обработки медицинских изображений, способ обработки медицинских изображений и программа согласно вариантам настоящего изобретения будут описаны со ссылками на прилагаемые чертежи.
Первый вариант
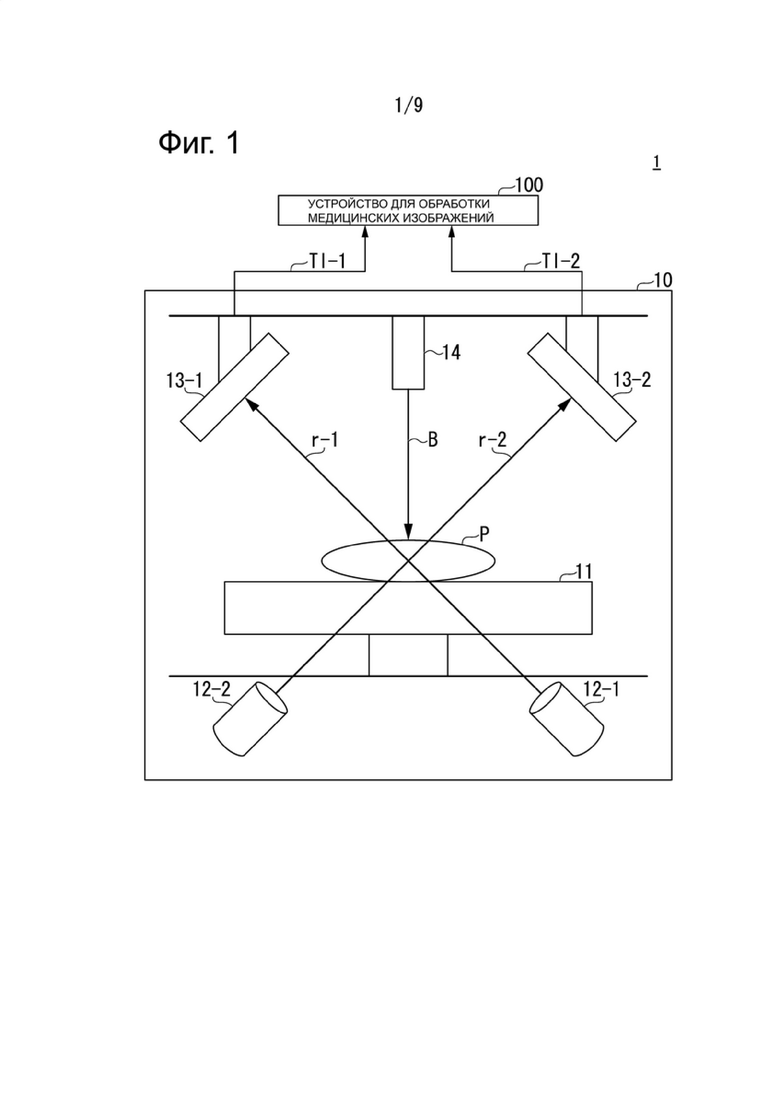
На фиг. 1 представлена схема конфигурации системы 1 лучевой терапии, содержащей устройство 100 для обработки медицинских изображений. Эта система 1 лучевой терапии содержит, например, лечебное устройство 10 и устройство 100 для обработки медицинских изображений.
Такое лечебное устройство 10 содержит, например, ложе 11, источники 12-1 и 12-2 излучения, детекторы 13-1 и 13-2 и контроллер 20 лечебного устройства. В дальнейшем предполагается, что дефис и число после позиционного обозначения обозначает, какая пара из источника излучения и детектора используется для облучения и просвечивания или получения прозрачного изображения. В последующем описании дефисы и следующие за ними цифры в позиционных обозначениях опущены, где это приемлемо.
Пациент P, получающий терапию, зафиксирован на ложе 11. Источник 12-1 излучения воздействует потоком r-1 излучения на пациента P. Источник 12-2 излучения воздействует потоком r-2 излучения на пациента P под углом, отличным от угла, под которым направлен поток излучения от источника 12-1 излучения. Потоки r-1 и r-2 излучения представляют собой пример электромагнитных волн и, например, представляют собой потоки рентгеновского излучения.
Поток r-1 излучения принимается детектором 13-1, и поток r-2 излучения принимается детектором 13-2. Эти детекторы 13-1 и 13-2 представляют собой, например, детекторы с плоской панелью (flat panel detector (FPD)), фотоэлектронные усилители изображения, фотоэлектронные усилители цветного изображения или другие подобные устройства. Детектор 13-1 принимает энергию потока r-1 излучения, преобразует эту энергию в цифровой сигнал и передает этот цифровой сигнал в устройство 100 для обработки медицинских изображений в качестве прозрачного изображения TI-1. Детектор 13-2 принимает энергию потока r-2 излучения, преобразует эту энергию в цифровой сигнал и передает этот цифровой сигнал в устройство 100 для обработки медицинских изображений в качестве прозрачного изображения TI-2. Хотя на фиг. 1 показаны только две пары из источников излучения и детекторов, лечебное устройство 10 может содержать три или более пар из источников излучения и детекторов.
Затвор 14 для облучения излучает терапевтический луч B в направлении пациента P на стадии лечения (терапии). Этот терапевтический луч B может представлять собой, например, пучок тяжелых частиц, рентгеновское излучение, γ-излучение, пучок электронов, пучок протонов, пучок нейтронов или другой подобный пучок. Хотя только один затвор 14 для облучения показан на фиг. 1, лечебное устройство 10 может содержать несколько затворов для облучения.
Прозрачное изображение TI может быть получено за несколько дней до облучения терапевтическим лучом B через затвор 14 для облучения, либо получено непосредственно перед облучением терапевтическим лучом B. Пользователь (врач или другой медицинский персонал) лечебного устройства 10 устанавливает план лечения, например, с использованием прозрачных изображений, полученных за несколько дней до облучения терапевтическим лучом B. При планировании лечения в план такого лечения вносят энергию излучения, которое должно воздействовать на пациента P, направление облучения, форму области (диапазона) облучения и другие подобные характеристики. Если облучение терапевтическим лучом B осуществляется несколько раз (несколько сеансов), план лечения содержит план распределения дозы облучения терапевтическим лучом B для каждого раза (сеанса). В составе этого плана лечения устройство 100 для обработки медицинских изображений принимает обозначение местонахождения мишени для облучения (местонахождение мишени) терапевтическим лучом B, указываемое врачом.
Устройство 100 для обработки медицинских изображений может определить местонахождение маркера, расположенного рядом с мишенью в теле пациента P, одновременно с определением разного рода информации относительно мишени. Маркер, помещенный в тело пациента P, представляет собой, например, металлический предмет и хорошо виден на прозрачном изображении TI. Соответственно в тех ситуациях, когда местонахождение мишени трудно отслеживать, отслеживают местонахождение маркера.
Устройство 100 для обработки медицинских изображений обозначает местонахождение и объем опухоли, например, когда обозначена граница между опухолью и областью нормальных тканей. Объем опухоли может называться макроскопическим объемом опухоли (gross tumor volume (GTV)), клиническим объемом мишени (clinical target volume (CTV)), внутренним объемом мишени (internal target volume (ITV)), планируемым лечебным объемом мишени (planning target volume (PTV)) или иметь другое подобное название. Объем GTV представляет собой объем мишени, который может быть визуально определен на основе изображения и требует облучения терапевтическим лучом B в достаточной дозе в ходе лучевой терапии. Объем CTV представляет собой объем, содержащий объем GTV и мишень, являющуюся потенциальным объектом терапии. Объем ITV представляет собой объем, полученный путем добавления предварительно заданного запаса к объему CTV с учетом движений объема CTV вследствие предсказуемых физиологических движений пациента P и других подобных факторов. Объем PTV представляет собой объем, полученный путем добавления запаса к объему ITV с учетом погрешности установления заданного положения пациента P, осуществляемого в процессе лечения. Соотношение между этими объемами установлено следующим Математическим выражением (1).
Математическое выражение 1

Устройство 100 для обработки медицинских изображений определяет поле облучения терапевтическим лучом путем добавления запаса с учетом погрешностей, которые, скорее всего, будут возникать в ходе фактического лечения заданного в плане лечения. Такая погрешность, которая вероятно может возникать в ходе фактического лечения, представляет собой, например, смещение положения пациента в процессе позиционирования пациента или другое подобное смещение.
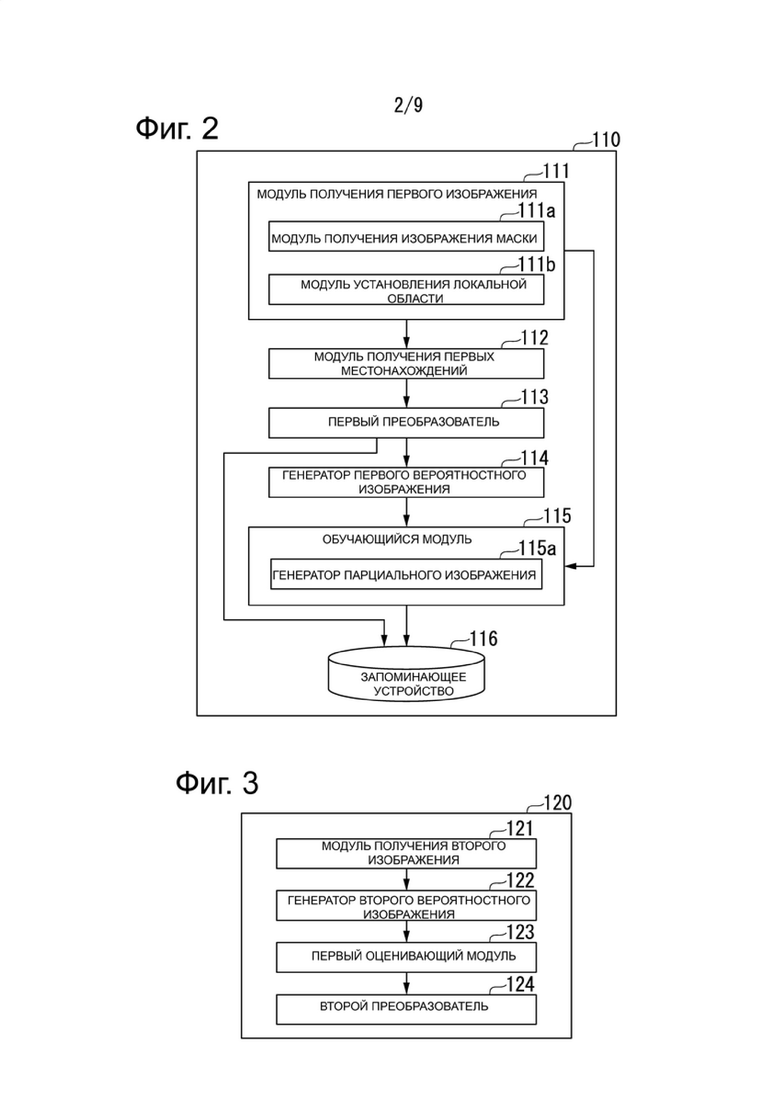
На фиг. 2 представлена блок-схема, показывающая конфигурацию обучающегося устройства 110 согласно первому варианту. Обучающееся устройство 110, показанное на фиг. 2, содержит, например, модуль 111 получения первого изображения, модуль 112 получения первых местонахождений, первый преобразователь 113, генератор 114 первого вероятностного изображения, обучающийся модуль 115 и запоминающее устройство 116 параметров. Эти компоненты (за исключением запоминающего устройства 116 параметров) реализуются, например, аппаратным процессором, таким как центральный процессор CPU, выполняющий программу (программное обеспечение). Некоторые или все эти компоненты могут быть реализованы посредством аппаратуры (схемы), такой как большая интегральная схема (large scale integration (LSI)), специализированная интегральная схема (application specific integrated circuit (ASIC)), программируемая пользователем вентильная матрица (field-programmable gate array (FPGA)), и графический процессор (graphics processing unit (GPU)), либо посредством взаимодействующих программного обеспечения и аппаратуры. Программа может быть сохранена заранее в запоминающем устройстве, таком как накопитель на жестком диске (hard disk drive (HDD)) или флэш-память, либо сохранена на съемном носителе для хранения информации, таком как диск DVD или диск CD-ROM, и инсталлирована в запоминающем устройстве посредством установки этого носителя для хранения информации в приводе накопителя информации.
Модуль 111 получения первого изображения сначала воспроизводит устройство для считывания изображения из состава лечебного устройства 10, входящего в состав системы 1 лучевой терапии. Более конкретно, в лечебном устройстве 10, входящем в состав системы 1 лучевой терапии, положения источника 12 излучения и детектора 13 излучения фиксированы, как показано на фиг. 1. Иными словами, в лечебном устройстве 10 направление получения изображения в устройстве для считывания изображения, содержащем пару из источника 12 излучения и детектора 13 излучения, фиксировано. Соответственно, когда в трехмерном пространстве, где установлены источник 12 излучения и детектор 13 излучения, определена заданная трехмерная система координат, положения источника 12 излучения и детектора 13 излучения могут быть представлены значениями координат по трем координатным осям. В последующем описании, информация о значениях координат по трем координатным осям будет называться геометрической информацией относительно устройства для считывания изображения, содержащего пару из источника 12 излучения и детектора 13 излучения.
Модуль 111 получения первого изображения получает первое изображение перед тем, как терапевтический луч B облучает пациента P. Первое изображение представляет собой, например, DRR-изображение, созданное (воспроизведенное) на основе прозрачного изображения, такого как трехмерное CT-изображение, захваченное во время планирования лечения. В частности, модуль 111 получения первого изображения создает DRR-изображение на основе прозрачного изображения, полученного во время планирования лечения в соответствии с геометрической информацией относительно устройства для считывания изображения, захватывающего прозрачное изображение TI во время лечения. Модуль 111 получения первого изображения передает полученное первое изображение в обучающийся модуль 115. Первое изображение, полученное модулем 111 получения первого изображения, может представлять собой, например, прозрачное рентгеновское изображение или другое подобное изображение, захваченное во время обучения или после него, как, например, во время прошлого сеанса или курса терапии (лечения) пациента P.
Модуль 111 получения первого изображения содержит, например, модуль 111a получения изображения маски и модуль 111b установления локальной области. Если изображение предмета (например, лечебного прибора или лечебного устройства), отличного от опухоли, являющейся главным предметом, захвачено в составе прозрачного изображения TI, модуль 111a получения изображения маски генерирует изображение маски, закрывающее эту область. Модуль 111a получения изображения маски передает изображение маски, закрывающей предмет, отличный от опухоли, в модуль 111b установления локальной области.
Модуль 111b установления локальной области устанавливает область, в которой доля, где захвачен предмет, отличный от опухоли, мала, иными словами, область, где захваченная опухоль занимает относительно большую долю площади (например, область окна (window area (WA (TP))), которая будет описана позднее), в составе изображения маски, поступившего от модуля 111a получения изображения маски, и передает указание установленной области модулю 112 получения первых местонахождений и обучающемуся модулю 115. Модуль 111b установления локальной области устанавливает область, которая по оценке обладает высоким обучающим эффектом, (например, область WA(k) окна, которая будет описана позднее) в составе изображения маски и указание этой установленной области обучающемуся модулю 115. Модуль 111b установления локальной области может принять указание области, введенное врачом, или может автоматически установить область, как будет описано ниже. В последнем случае, модуль 111b установления локальной области может установить первое изображение и изображение маски, которое по оценке обладает высоким обучающим эффектом, в обучающемся модуле 115, что будет описано позднее, и передать это в отношении области WA(k) окна. Изображение, которое по оценке обладает высоким обучающим эффектом, представляет собой, например, изображение, имеющее большую разницу величин яркости.
Модуль 112 получения первых местонахождений получает информацию о местонахождении мишени в пределах первого изображения, поступившего от модуля 111 получения первого изображения. Эта информация о местонахождения мишени указывает местонахождение, где находится затрагиваемая область пациента P, иными словами, опухоль, являющаяся объектом, который должен быть облучен терапевтическим лучом B, или другим подобным фактором. Эта информация о местонахождении мишени представляет собой информацию, о местонахождении (например, о местонахождении, в котором отражена геометрическая информация о центре мишени, что может быть подтверждено посредством реконструкции), идентифицированном пользователем (например, врачом) устройства 100 для обработки медицинских изображений во время планирования лечения. Модуль 112 получения первых местонахождений передает первое изображение и информацию о местонахождении мишени первому преобразователю 113. Местонахождение, идентифицированное пользователем (например, врачом) устройства 100 для обработки медицинских изображений во время планирования лечения, представляет собой пример «местонахождения мишени» или «первого местонахождения».
Первый преобразователь 113 определяет параметр преобразования (conversion parameter CP) и параметр обратного преобразования (reverse conversion parameter RCP) посредством выполнения процедуры заданного преобразования первого изображения на основе информации о местонахождении мишени, поступившей от модуля 112 получения первых местонахождений. Первый преобразователь 113 ассоциирует местонахождение мишени, соответствующее положению пикселей первого изображения, полученному на основе параметра CP преобразования, с положением пикселей в составе первого вероятностного изображения и передает ассоциированное положение генератору 114 первого вероятностного изображения. Первый преобразователь 113 передает параметр RCP обратного преобразования в запоминающее устройство 116 параметров. Процедура заданного преобразования, выполняемого применительно к первому изображению, параметр CP преобразования и параметр RCP обратного преобразования буду описаны позднее.
Генератор 114 первого вероятностного изображения генерирует первое вероятностное изображение на основе данных местонахождения мишени, поступивших от первого преобразователя 113, и передает это первое вероятностное изображение обучающемуся модулю 115. Первое вероятностное изображение представляет собой, например, изображение, на котором вероятность местонахождения мишени в пределах первого изображения (вероятность, того что это местонахождение опухоли) представлена яркостью или другим подобным способом.
Обучающийся модуль 115 формирует параметр вычисления вероятности (likelihood calculation parameter, LP), представляющий регрессионную модель обучения для соотношения между некоторыми или всеми первыми изображениями и первым вероятностным изображением на основе некоторых или всех первых изображений (более конкретно, изображений областей окон), поступивших от модуля 111 получения первого изображения, и первого вероятностного изображения, поступившего от генератора 114 первого вероятностного изображения. Обучающийся модуль 115 передает параметр LP вычисления вероятности в запоминающее устройство 116 параметров. Некоторые или все первые изображения и первое вероятностное изображение, фазы дыхания на которых ассоциированы одни с другими, являются примером «настроечных данных».
Обучающийся модуль 115 содержит, например, генератор 115a парциального изображения. Этот генератор 115a парциального изображения формирует парциальное изображение, которое представляет парциальную область первого вероятностного изображения.
На фиг. 3 представлена блок-схема, показывающая конфигурацию устройства 120 для отслеживания движущегося объекта согласно первому варианту. Устройство 120 для отслеживания движущегося объекта, показанное на фиг. 3, содержит, например, модуль 121 получения второго изображения, генератор 122 второго вероятностного изображения, первый оценивающий модуль 123 и второй преобразователь 124. Некоторые или все эти компоненты могут быть реализованы аппаратно, например, на основе БИС (LSI) или посредством взаимодействия программного обеспечения и аппаратуры, как в обучающемся устройстве 110. Программа может быть сохранена заранее в запоминающем устройстве, либо сохранена на сменном носителе для хранения информации и инсталлирована в запоминающем устройстве путем установки этого носителя информации в приводе накопителя.
Модуль 121 получения второго изображения получает вторые изображения, представляющие собой прозрачные изображения TI, захваченные через заданные промежутки времени непосредственно перед или во время облучения пациента P терапевтическим лучом B. Модуль 121 получения второго изображения передает эти вторые изображения генератору 122 второго вероятностного изображения.
Модуль 121 получения второго изображения получает информацию о местонахождении мишени в виде проекционной матрицы. Соответственно, модуль 121 получения второго изображения получает проекционную матрицу, ассоциированную с каждым устройством для считывания изображения, заранее на основе геометрической информации. Иными словами, модуль 121 получения второго изображения получает проекционную матрицу для каждого устройства для считывания изображения. В дополнение к этому, модуль 121 получения второго изображения вычисляет значения трехмерных координат, указывающих местонахождение мишени в заданном трехмерном пространстве на основе местонахождений мишени, захваченных в составе двух первых изображений, с использованием принципа триангуляции. Соответственно, модуль 121 получения второго изображения вычисляет позицию, в которой было захвачено местонахождение мишени в заданном трехмерном пространстве, в пределах прозрачного изображения TI пациента P.
Генератор 122 второго вероятностного изображения формирует второе вероятностное изображение на основе вторых изображений, поступивших от модуля 121 получения второго изображения. Этот генератор 122 второго вероятностного изображения формирует второе вероятностное изображение, ассоциированное со вторыми изображениями, например, на основе параметра LP вычисления вероятности, поступившего от запоминающего устройства 116 параметров. Генератор 122 второго вероятностного изображения передает сформированное им второе вероятностное изображение первому оценивающему модулю 123.
Этот первый оценивающий модуль 123 оценивает местонахождение мишени в пределах вторых изображений на основе второго вероятностного изображения и вторых изображений, поступивших от генератора 122 второго вероятностного изображения. Первый оценивающий модуль 123 передает оценку местонахождения мишени второму преобразователю 124.
Второй преобразователь 124 определяет местонахождение мишени (т.е. позицию, которую облучает терапевтический луч B) на основе оценки местонахождения мишени, поступившей от первого оценивающего модуля 123. Например, второй преобразователь 124 определяет местонахождение мишени посредством преобразования оценки местонахождения мишени, поступившей от первого оценивающего модуля 123, с использованием параметра RCP обратного преобразования, поступившего от запоминающего устройства 116 параметров. Процедура преобразования, осуществляемая вторым преобразователем 124, представляет собой процедуру преобразования в направлении, обратном преобразованию, осуществляемому первым преобразователем 113.
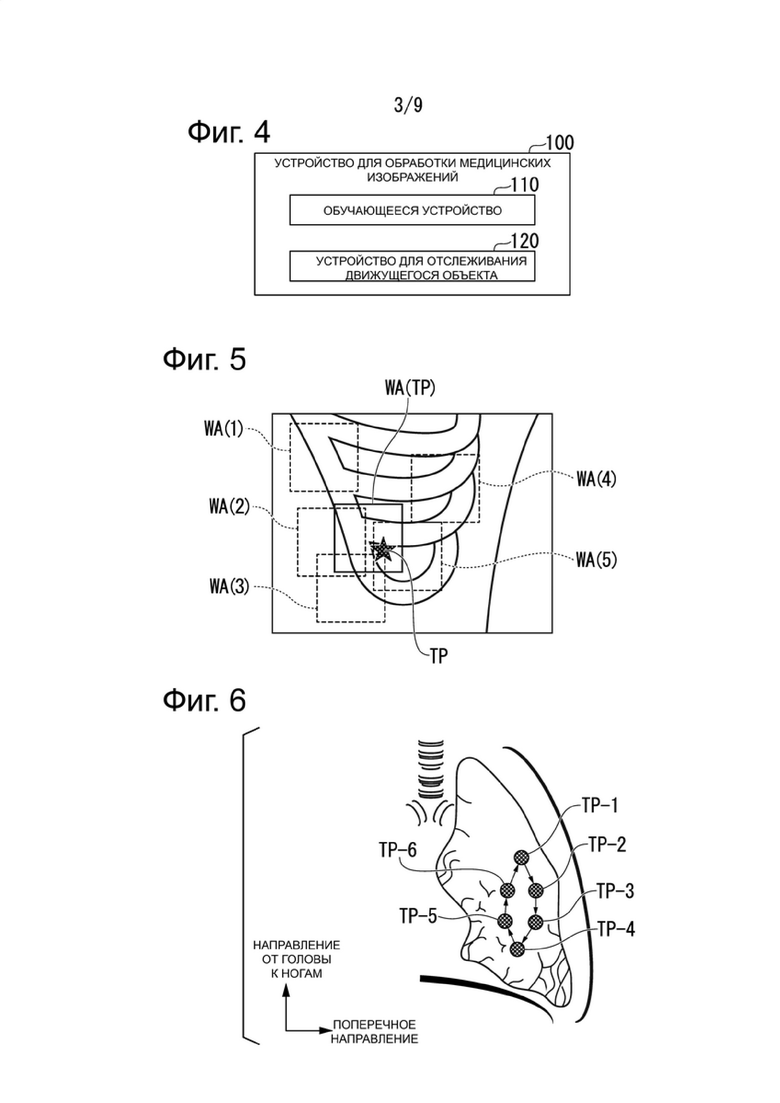
На фиг. 4 представлена блок-схема, показывающая конфигурацию устройства 100 для обработки медицинских изображений согласно первому варианту. Устройство 100 для обработки медицинских изображений, показанное на фиг. 4, содержит, например, обучающееся устройство 110 и устройство 120 для отслеживания движущегося объекта.
Заданная процедура преобразования первых изображений, осуществляемая первым преобразователем 113, способ формирования параметра CP преобразования и параметра RCP обратного преобразования, и способ использования указанных процедуры и параметров будут описаны с использованием фиг. 5-7.
На фиг. 5 представлена диаграмма, показывающая пример состояния анализа изображений, осуществляемого модулем 111 получения первого изображения для прозрачных изображений TI. Прозрачное изображение TI, представленное на фиг. 5, показывает, что местонахождение TP мишени, которую облучает терапевтический луч B, находится в торакоабдоминальной части тела.
Модуль 111 получения первого изображения устанавливает несколько областей окон (WA), показанных на фиг. 5, для прозрачных изображений TI для нескольких моментов времени. Эти области окон (WA) устанавливают, например, таким образом, что они содержит изображения позиций, в которых выделяют характерные участки прозрачных изображений TI. Эти характерные участки прозрачных изображений TI представляют собой, например, четко видимые участки, такие как опухоль, маркер, диафрагма и другие подобные участки. В последующем описании, имеют место случаи, в которых область окна, содержащая местонахождение TP мишени в области изображения и представленная сплошной линией, называется областью WA(TP) окна, а область окна, представленная штриховой линией и не ассоциированная с первым вероятностным изображением, называется областью WA(k) окна (k - целое число). В примере, показанном на фиг. 5, k является целым числом в диапазоне от 1 до 5. Позиции, которые эти области окон (WA) занимают в пределах первого изображения, являются фиксированными.
Модуль 111b установления локальной области устанавливает область WA(TP) окна таким образом, что она содержит все траектории скорректированных местонахождений мишени с TP-1 по TP-6. Когда области окон (WA) устанавливают автоматически, модуль 111b установления локальной области устанавливает локальную область, обладающую большой разницей яркости относительно первых изображений, ассоциированных с местонахождениями с TP-1 по TP-6, в качестве областей WA(k) окон. В качестве альтернативы, модуль 111b установления локальной области может установить локальную область, обладающую длинной траекторией оптического потока, в качестве области WA(k) окна. В качестве альтернативы, модуль 111b установления локальной области может установить локальную область, содержащую несколько характерных точек, полученных в результате определения углов изображения или другим подобным способом, в качестве области WA(k) окна. Если затронутая часть тела располагается в легких, например, структура изображения мишени, захваченного в составе прозрачного изображения TI, является четкой, вследствие чего модуль 111b установления локальной области может предпочтительно установить область WA(k), содержащую эту позицию. Если затронутая часть тела располагается в большом органе, таком как печень, местонахождение мишени, появившейся в составе прозрачного изображения TI, вероятно будет нечетким. В таком случае, модуль 111b установления локальной области устанавливает четко видимую часть, такую как граница диафрагмы, в качестве области WA(k) окна.
На фиг. 6 представлена диаграмма, показывающая пример характеристик перемещения местонахождения TP мишени в области WA(TP) окна для нескольких моментов времени. В дальнейшем, предполагается, что дефис и следующая за ним цифра в составе позиционного обозначения, указывают местонахождение мишени (фазу дыхания). В ряде случаев, описание составлено таким образом, что дефисы и следующие за ними цифры в составе позиционных обозначений опущены, где это приемлемо. Местонахождение TP мишени перемещается в соответствии с дыханием пациента P, например. В соответствии с дыханием пациента P местонахождение TP мишени перемещается, например, в порядке номеров местонахождений мишени с TP-1 по TP-6, как показано на фиг. 6. Соответственно, местонахождение TP мишени имеет тенденцию к значительному перемещению в направлении от головы к ногам пациента P, диафрагма которого заметно двигается. С другой стороны, местонахождение TP мишени в меньшей степени перемещается в поперечном направлении (в любом направлении в плоскости, осями которой являются направление вперед-назад и направление вправо-влево), пересекающем направление от головы пациента к ногам, показанное на фиг. 6. Иными словами, в случае, когда считывание изображения осуществляется таким образом, что направление от головы к ногам пациента совмещено с вертикальным направлением прозрачного изображения TI, когда местонахождение TP мишени проецируется на прозрачное изображение TI, перемещение местонахождения TP мишени в горизонтальном направлении прозрачного изображения уменьшается. Иными словами, обучение, осуществляемое обучающимся модулем 115, может стать затруднительным, поскольку изменение в горизонтальном направлении первого вероятностного изображения, сформированного на основе местонахождения TP мишени, оказывается незначительным. Соответственно, первый преобразователь 113 определяет параметр CP преобразования для усовершенствования эффекта обучения в обучающемся модуле 115.
В дальнейшем здесь будет описан параметр CP преобразования. Этот параметр CP преобразования содержит параметры A и b, устанавливающие следующее линейное преобразование y=Ax+b с целью ассоциирования местонахождения мишени в пределах первого изображения с местонахождением мишени в пределах первого вероятностного изображения. Здесь, x=(ut, vt) и y=(ut’, vt’) соответственно указывают координаты в пределах первого изображения и координаты в пределах первого вероятностного изображения. Здесь A представляет собой матрицу размером 2×2. А также b представляет собой величину сдвига. Например, если A представляет собой единичную матрицу, положение каждого пикселя в составе первого изображения соответствует положению какого-либо пикселя в составе первого вероятностного изображения. Далее, если размер первого изображения больше размера первого вероятностного изображения, первый преобразователь 113 ассоциирует пиксели парциальной области первого изображения с каждым пикселем первого вероятностного изображения.
В качестве другого примера, пиксели в составе первого соображения, имеющие координаты в виде десятичных дробей, могут соответствовать положениям пикселей в составе первого вероятностного изображения, координаты которых определены с целочисленной точностью. Иными словами, если все диагональные элементы матрицы A образуют диагональную матрицу, элементы которой равны 1/2, и b представляет собой нулевой вектор, пиксель в позиции с координатами (x/2, y/2) в составе первого изображения ассоциирован с позицией с координатами (x, y) в составе первого вероятностного изображения.
Отмеченная выше проблема вызвана незначительным изменением местонахождения TP мишени в пределах первого вероятностного изображения, поскольку ассоциирование осуществляется в том же масштабе, как в случае, когда A представляет собой единичную матрицу. Соответственно, матрицу A регулируют таким образом, чтобы положение пикселя, определяемое координатами в виде десятичных дробей, в составе первого изображения было ассоциировано с положением пикселя, определяемым координатами с целочисленной точностью, в составе первого вероятностного изображения. Соответственно, обучающий эффект обучающегося модуля 115 усовершенствуют путем применения изменения в горизонтальном направлении к первому вероятностному изображению. Если траектория перемещения первого положения в составе первого изображения представляет собой овальную траекторию, например, матрицу A регулируют таким образом, что эта траектория становится точной окружностью в пределах первого вероятностного изображения. Эта матрица A представляет собой «матрицу преобразования, определяемую на основе перемещения первого положения во времени». Параметр RCP обратного преобразования представляет собой параметр обратного преобразования для рассмотренного выше линейного преобразования. Конкретнее, параметр RCP обратного преобразования представляет собой матрицу, обратную относительно матрицы A и сдвига b.
Местонахождение мишени в пределах первого изображения, которое было скорректировано посредством упомянутого выше линейного преобразования, называется скорректированным местонахождением TP# мишени. Это скорректированное местонахождение TP# мишени представляет собой пример «второго местонахождения». Направление от головы пациента P к ногам, показанное на фиг. 6, представляет собой пример «первого направления» и поперечное направление представляет собой пример «второго направления», перпендикулярного первому направлению.
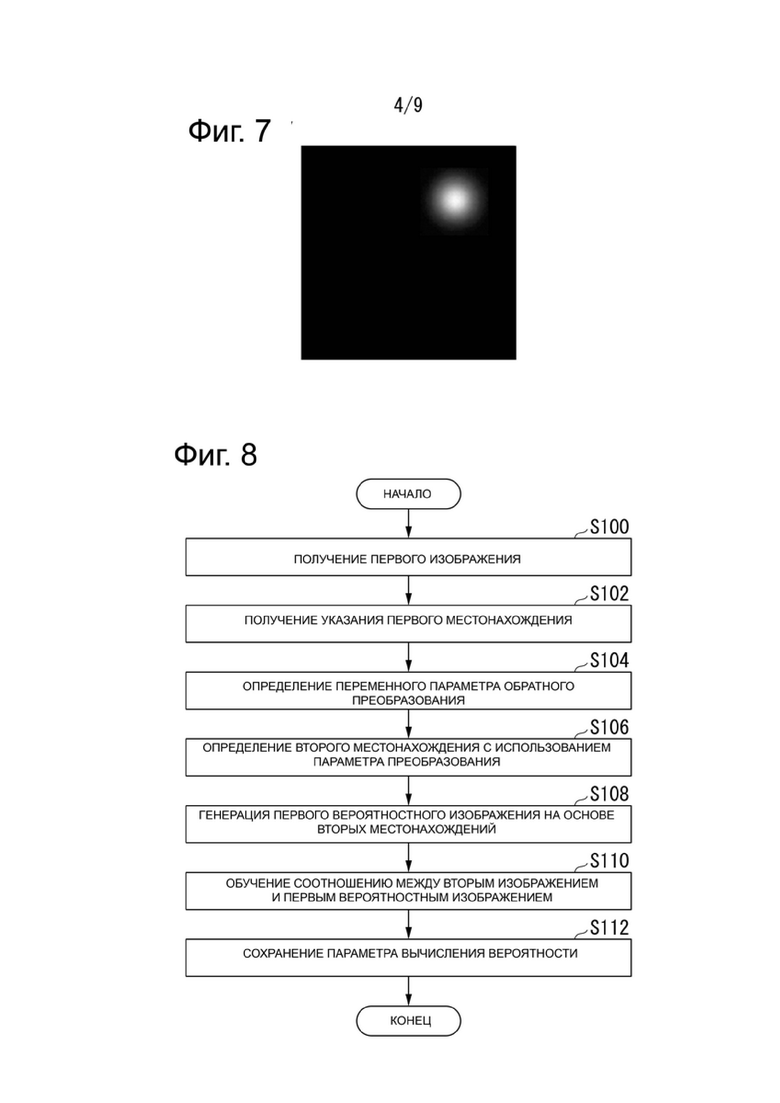
Далее будет описана процедура, посредством которой генератор 114 первого вероятностного изображения формирует такое первое вероятностное изображение. На фиг. 7 представлен пример первого вероятностного изображения, формируемого генератором 114 первого вероятностного изображения. Часть изображения (белая часть) с большой яркостью, показанная на фиг. 7, представляет собой часть (область), в которой весьма вероятно присутствует местонахождение мишени. Предполагается, что первое вероятностное изображение, показанное на фиг. 7, содержит местонахождение мишени, находящееся в правой верхней части изображения. Генератор 114 первого вероятностного изображения формирует первое вероятностное изображение на основе указания второго местонахождения, поступившего от первого преобразователя 113, например. Генератор 114 первого вероятностного изображения формирует вероятностное изображение L(u, v) согласно Математическому выражению (2) ниже, где координатами, обозначающими второе местонахождение, являются (ut’, vt’).
Математическое выражение 2

Параметр σ в Математическом выражении (2) представляет собой произвольный параметр, задаваемый пользователем. Например, параметру σ присваивают более высокое значение, когда разрешение в пересчете на пиксель выше. Хотя размер первого вероятностного изображения, формируемого генератором 114 первого вероятностного изображения, может быть установлен произвольным образом, этот размер изображения может быть установлен так, чтобы траектория местонахождения мишени находилась в пределах первого вероятностного изображения, как описано выше. Соответственно, размер первого вероятностного изображения может быть уменьшен по сравнению с размером первого изображения.
В дальнейшем будет описана процедура, посредством которой обучающийся модуль 115 определяет параметр LP вычисления вероятности. Например, обучающийся модуль 115 использует изображения, вырезанные из одной или нескольких областей WA(k) окон в пределах первого изображения и первого вероятностного изображения, в качестве обучающих данных и генерирует модель, формирующую первое вероятностное изображение, когда в нее вводят изображения областей WA(k) окон.
Обучающийся модуль 115 получает, например, функцию f для случая, в котором математическое выражение, представляющее соотношение между вектором x, соединяющим изображения, вырезанные из одной или нескольких областей WA(k) окон в составе первого изображения, и вектором y в пределах первого вероятностного изображения, представляет собой Математическое выражение (3) ниже. Обучающийся модуль 115 определяет эту функцию f с использованием вектора, в котором собраны величины пикселей из состава первого изображения, в качестве вектора x и с использованием вектора, в котором собраны величины пикселей из состава первого вероятностного изображения, в качестве вектора y.
Математическое выражение 3

Обучающийся модуль 115 определяет функцию f, посредством которой обеспечивается уменьшение погрешности Δ=y-f(x) с использованием вектора y первого вероятностного изображения, поступившего от генератора 114 первого вероятностного изображения. Обучающийся модуль 115 может определить функцию f с использованием глубокой нейронной сети или с использованием других способов машинного обучения, таких как нейронная сеть, сверточная нейронная сеть и дерево принятия решений. В случае, когда функции f для нескольких структур определены с использованием заданного числа нескольких структур, например, обучающийся модуль 115 может обучиться всем указанным функциям f указанных нескольких структур.
На фиг. 8 представлена логическая схема, показывающая пример последовательности операций обучающегося устройства 110. Сначала, модуль 111 получения первого изображения получает первые изображения для нескольких моментов времени (этап S100). Далее, модуль 112 получения первых местонахождений получает указания первых местонахождений, ассоциированных с полученными первыми изображениями для нескольких моментов времени (этап S102). Далее, первый преобразователь 113 определяет параметр CP преобразования и параметр RCP обратного преобразования на основе траектории полученных первых местонахождений для нескольких моментов времени и управляет запоминающим устройством 116 параметров для сохранения параметра CP преобразования и параметра RCP обратного преобразования (этап S104). Далее, первый преобразователь 113 определяет вторые местонахождения посредством преобразования первых местонахождений на основе параметра CP преобразования (этап S106). Далее, генератор 114 первого вероятностного изображения создает первое вероятностное изображение на основе вторых местонахождений (этап S108). Далее, обучающийся модуль 115 обучается соотношению между вторыми изображениями и первым вероятностным изображением с использованием вторых изображений и первого вероятностного изображения (этап S110). Далее, обучающийся модуль 115 управляет запоминающим устройством 116 параметров для сохранения параметра LP вычисления вероятности (этап S112). На этом выполнение процедуры согласно рассматриваемой здесь логической схеме прекращается.
Далее будет описана процедура, согласно которой генератор 122 второго вероятностного изображения в составе устройства 120 для отслеживания движущегося объекта генерирует второе вероятностное изображение, ассоциированное со вторым изображением. Генератор 122 второго вероятностного изображения генерирует второе вероятностное изображение, ассоциированное с упомянутым выше Математическим выражением (3) на основе второго изображения, поступившего от модуля 121 получения второго изображения, и параметра LP вычисления вероятности, полученного от запоминающего устройства 116 параметров. Генератор 122 второго вероятностного изображения использует парциальные изображения из состава второго изображения, расположенные в таких же положениях, как положения областей WA(k) окон, установленных модулем 111b установления локальной области, в качестве входных данных для упомянутого выше Математического выражения (3). Здесь ассоциирование положений пикселей выходного второго вероятностного изображения и второго изображения является таким же, как ассоциирования первого вероятностного изображения и первого изображения.
В дальнейшем здесь будет рассмотрен способ оценки второго местонахождения в пределах второго изображения посредством первого оценивающего модуля 123. Например, первый оценивающий модуль 123 осуществляет оценку положения пикселя, для которого вероятность является максимальной, в составе второго вероятностного изображения, поступившего от генератора 122 второго вероятностного изображения, в качестве второго местонахождения. Первый оценивающий модуль 123 может определить положение пикселя на основе средневзвешенной величины для каждого положения пикселя, использующего вероятность, обозначенную вторым вероятностным изображением, поступившим от генератора 122 второго вероятностного изображения, в качестве весового коэффициента и использовать найденное положение пикселя в качестве второго местонахождения. В этом случае первый оценивающий модуль 123 может осуществить усреднение с использованием весовых коэффициентов, убывающих при увеличении местонахождения опухоли и/или ее траектории, полученной во время планирования лечения или в ходе прошлого сеанса (ов) лечения. Если местонахождение мишени может быть найдено из второго изображения, первоначально полученного модулем 121 получения второго изображения, первый оценивающий модуль 123 прогнозирует второе местонахождение в пределах второго изображения, которое должно быть получено в следующий раз и после следующего раза на основе местонахождения мишени. Здесь могут быть подготовлены несколько прогнозируемых местонахождений, и местонахождение, для которого весовые коэффициенты были усреднены с применением вероятностей из состава второго вероятностного изображения, ассоциированных с этими местонахождениями, в качестве весовых коэффициентов, может быть использовано в качестве второго местонахождения. Прогнозируемые местонахождения-кандидаты могут быть подготовлены посредством такого способа, как фильтр частиц.
Когда оценка местонахождения мишени представляет трехмерные координаты, первый оценивающий модуль 123 может получить вероятность на основе второго вероятностного изображения в местонахождениях, найденных путем проецирования прогнозируемого местонахождения на соответствующие изображения (прозрачные изображения TI-1 и TI-2) и использовать полученный продукт в качестве вероятности оцениваемого местонахождения мишени. Когда прогнозируемое изображение представлено в двумерных координатах, вероятность может быть определена для двух местонахождений мишени в пределах двух изображений, для которых может быть установлено эпиполярное ограничение.
Далее здесь будет рассмотрена процедура, посредством которой второй преобразователь 124 осуществляет преобразование местонахождения мишени с использованием параметра RCP обратного преобразования. Второй преобразователь 124 осуществляет преобразование местонахождения мишени в местонахождение x мишени в составе второго изображения, представленного Математическим выражением (4) ниже, в соответствии с оценкой местонахождения y=(u’, v’) мишени в пределах второго вероятностного изображения, поступившей от первого оценивающего модуля 123, и параметром RCP обратного преобразования (A-1, b), полученным из запоминающего устройства 116 параметров.
Математическое выражение 4

Иными словами, второй преобразователь 124 вычисляет местонахождение x=A-1y-b. Второй преобразователь 124 может передать на выход указание местонахождения, полученное путем коррекции преобразованного местонахождения мишени с использованием модели траектории второго местонахождения, созданной на стадии планирования лечения. Второй преобразователь 124 моделирует соотношение ut=r(vt) (r представляет собой функцию, например) между ut и vt на основе (ut, vt), т.е. местонахождения опухоли в пределах первого изображения, полученного от модуля 112 получения первых местонахождений. Эта модель представляет собой модель линейной регрессии, которая может быть представлена таким математическим выражением, как ut=avt+b (здесь a и b являются произвольными величинами), например. Второй преобразователь 124 может подставить выходную величину, как она представлена Математическим выражением (5) ниже, с использованием созданной модели.
Математическое выражение 5

Вторые изображения, полученные модулем 121 получения второго изображения, представляют собой два изображения (прозрачные изображения TI-1 и TI-2), одновременно захваченные в различных направлениях в лечебном устройстве 10, показанном на фиг. 1, например. Иными словами, модуль 121 получения второго изображения может получить второе местонахождение, ассоциированное с каждым изображением. Соответственно, модуль 121 получения второго изображения может получить второе местонахождение в трехмерном пространстве, для которого установлено эпиполярное ограничение, из каждого из прозрачных изображений TI-1 и TI-2. Указанное эпиполярное ограничение представляет собой геометрическое ограничение на основе того факта, что относительное взаимное расположение между двумя устройствами для считывания изображения известно и представляет ограничение, что центральная точка субъекта, захваченного на одном изображении, ограничена на эпиполярной линии на другом изображении. Однако поскольку второе местонахождение, ассоциированное с каждым изображением, не ограничивается соответствием эпиполярному ограничению, модуль 121 получения второго изображения определяет второе местонахождение в трехмерном пространстве с использованием метода наименьших квадратов.
На фиг. 9 представлена логическая схема, показывающая пример последовательности операций устройства 120 для отслеживания движущегося объекта. Операции логической схемы, показанной на фиг. 9, осуществляются, например, после выполнения операций логической схемы, показанной на фиг. 8.
Сначала, модуль 121 получения второго изображения получает второе изображение (этап S200). Затем, генератор 122 второго вероятностного изображения формирует второе вероятностное изображение (этап S202). Далее, первый оценивающий модуль 123 определяет второе местонахождение на основе второго вероятностного изображения (этап S204). Затем, второй преобразователь 124 преобразует второе местонахождение согласно параметру обратного преобразования и определяет местонахождение мишени (этап S206). Тем самым выполнение процедур согласно этой логической схеме завершается.
Как описано выше, в устройстве 100 для обработки медицинских изображений согласно первому варианту, можно быстро отслеживать местонахождение мишени с высокой точностью на основе прозрачного изображения TI пациента P, облучаемого в ходе радиационной терапии, в соответствии с сигналами обучающегося устройства 110, которое обучается местонахождению мишени, найденному во время планирования лечения, и определяет параметр CP преобразования и параметр RCP обратного преобразования, используемые при определении местонахождения мишени в пределах прозрачного изображения TI, и параметр LP вычисления вероятности, используемый при определении вероятности в прозрачном изображении, и устройства 120 для отслеживания движущегося объекта, которое определяет местонахождение мишени с использованием вероятности в пределах прозрачного изображения TI, полученного, когда происходит облучение терапевтическим лучом B, с использованием прозрачного изображения TI, полученного, когда происходит облучение терапевтическим лучом B, и различных параметров, найденных обучающимся устройством 110.
Второй вариант
В дальнейшем здесь будет рассмотрен второй вариант. Будет рассмотрено устройство 100A для обработки медицинских изображений согласно второму варианту. В последующем описании компонентам, имеющим такие же функции, как компоненты, описанные в первом варианте, будут присвоены такие же названия и позиционные обозначения, а подробное описание их функций будет опущено.
На фиг. 10 представлена блок-схема, показывающая конфигурацию устройства 120A для отслеживания движущегося объекта. Устройство 120A для отслеживания движущегося объекта, показанное на фиг. 10, отличается от устройства 120 для отслеживания движущегося объекта согласно первому варианту, показанного на фиг. 3, в том, что первое содержит модуль 125 определения надежности, второй оценивающий модуль 126, решающий модуль 127 и запоминающее устройство 128. Соответственно, последующее описание будет фокусироваться на этих модуле 125 определения надежности, втором оценивающем модуле 126, решающем модуле 127 и запоминающем устройстве 128.
Модуль 125 определения надежности осуществляет определение надежности на основе второго вероятностного изображения, поступившего от генератора 122 второго вероятностного изображения. Эта надежность представляет собой степень определения надежности второго вероятностного изображения, формируемого генератором 122 второго вероятностного изображения. Модуль 125 определения надежности передает найденную им надежность решающему модулю 127.
Второй оценивающий модуль 126 оценивает местонахождение мишени на основе второго изображения, поступившего от модуля 121 получения второго изображения, и передает результат оценки решающему модулю 127. Второй оценивающий модуль 126 представляет собой, например, модуль сопоставления с шаблоном, осуществляющий процедуру сопоставления второго изображения с использованием прозрачного изображения TI, полученного во время планирования лечения, или другого подобного изображения, либо области изображения, содержащей местонахождение мишени в составе второго изображения, полученного прежде облучения терапевтическим лучом B, в качестве изображения шаблона. Второй оценивающий модуль 126 рассматривает степень совпадения (или степень корреляции) с изображением шаблона в качестве вероятности, например, и определяет двумерные координаты или трехмерные координаты местонахождения мишени, как это делает первый оценивающий модуль 123. Здесь, степень совпадения получают посредством нормированной кросс-корреляции, например. Второй оценивающий модуль 126 управляет запоминающим устройством 128 для сохранения изображения шаблона, используемого при осуществлении сопоставления с шаблоном.
Решающий модуль 127 определяет, какое из местонахождений - местонахождение мишени, поступившее от второго преобразователя 124, и оценки местонахождения мишени, поступившей от второго оценивающего модуля 126, будет выбрано в качестве местонахождения мишени для облучения терапевтическим лучом B. Решающий модуль 127 определяет местонахождение мишени, например, на основе величины надежности, поступившей от модуля 125 определения надежности. Решающий модуль 127 определяет, что указание местонахождения мишени, поступившее от второго преобразователя 124, используется в случае, когда величина надежности не меньше пороговой величины, установленной заранее, например. Решающий модуль 127 определяет, что оценка местонахождения мишени, поступившая от второго оценивающего модуля 126, используется в случае, когда величина надежности меньше пороговой величины, установленной заранее. Решающий модуль 127 представляет собой пример «третьего оценивающего модуля»». Местонахождение мишени, про которое определено решающим модулем 127, что его следует использовать, представляет собой пример «третьего местонахождения».
В дальнейшем здесь будет рассмотрена процедура определения надежности, выполняемая в модуле 125 определения надежности. Модуль 125 определения надежности вычисляет надежность, например, с использованием функции f, определяемой обучающимся модулем 115. Модуль 125 определения надежности определяет высокую надежность, если второе изображение представляет собой прозрачное изображение TI, аналогичное первому изображению, когда была определена функция f. Модуль 125 определения надежности определяет низкую надежность, если второе изображение представляет собой прозрачное изображение TI, имеющее структуру, отличную от первого изображения, когда была определена функция f. Этот случай может представлять собой случай, в котором глубина дыхания пациента P различна в момент, когда захвачено первое изображение, и в момент, когда захвачено второе изображение.
Разница между вероятностными изображениями в случае, когда величина надежности, определенная модулем 125 определения надежности, высока, и в случае, когда величина надежности, определенная модулем 125 определения надежности, мала, будет рассмотрена с использованием фиг. 11 и фиг. 12. На фиг. 11 представлен пример второго вероятностного изображения, генерируемого устройством 120A для отслеживания движущегося объекта согласно второму варианту. Модуль 125 определения надежности определяет высокую надежность относительно вероятностного изображения, имеющего большую разницу светимостей (разницу яркостей) между областью, имеющей наивысшую яркость, и областью, имеющей наименьшую яркость, как показано на фиг. 11. Модуль 125 определения надежности определяет высокую надежность в случае, когда очертания области, имеющей наивысшую яркость, являются относительно четкими, как показано на фиг. 11, и в случае, когда форма области, имеющей яркость не ниже конкретной величины, является круглой. На фиг. 12 представлен другой пример второго вероятностного изображения, генерируемого устройством 120A для отслеживания движущегося объекта согласно второму варианту. Модуль 125 определения надежности определяют низкую надежность в отношении вероятностного изображения, имеющего относительно небольшую разницу светимостей (разницу яркостей) между областью, имеющей наивысшую яркость, и областью имеющей наименьшую яркость, как показано на фиг. 12. Модуль 125 определения надежности определяют низкую надежность в случае, когда очертания области, имеющей наивысшую яркости, являются нечеткими, как показано на фиг. 12, и в случае, когда форма области, имеющей яркость не ниже конкретной величины, является некруглой.
Генератор 114 первого вероятностного изображения искусственно создает вставку в вероятностное изображение, имеющую высокую надежность, как показано на фиг. 13, с использованием Математического выражения (2). Соответственно, настроечное выражение, полученное модулем 118 вычисления вероятности, также с высокой вероятностью является изображением, близким к фиг. 11, однако вероятностное изображение, обладающее низкой надежностью, как показано на фиг. 12, может быть, вероятно, передано на выход. Соответственно, модуль 125 определения надежности определяет, например, величину корреляции между вторым вероятностным изображением, поступившим от генератора 122 второго вероятностного изображения, и искусственно созданной вставкой вероятностного изображения в качестве надежности.
Модуль 125 определения надежности сканирует искусственную вставку в изображение, генерируемую таким же способом, как способ, используемый генератором 114 первого вероятностного изображения, и показанную на фиг. 13, в составе второго вероятностного изображения, поступившего от генератора 122 второго вероятностного изображения, например, для вычисления величин корреляции соответствующих местонахождений и определяет максимальную величину или среднюю величину для совокупности вычисленных величин корреляции, в качестве надежности. Модуль 125 определения надежности может ограничить диапазон, в котором сканируют искусственную вставку изображения до местонахождения, полученного вторым преобразователем 124 в результате преобразования из местонахождения в котором вероятность максимизирована в составе второго вероятностного изображения, поступившего от генератора 122 второго вероятностного изображения, или до окрестностей, включая это местонахождение.
Если надежность ниже заданной величины, например, решающий модуль 127 управляет устройством вывода, таким как дисплей в системе 1 лучевой терапии, для представления предупреждающего сообщения пользователю. Далее, если происходит облучение терапевтическим лучом B, решающий модуль 127 может передать команду для остановки облучения в систему 1 лучевой терапии или источнику 12 излучения. Решающий модуль 127 получает указание местонахождения мишени, поступившее от второго преобразователя 124, величину надежности, поступившую от модуля 125 определения надежности, и оценку местонахождения мишени от второго оценивающего модуля 126 и передает указание местонахождения мишени, определяемого с использованием перечисленных параметров. Решающий модуль 127 определяет местонахождение мишени, например, согласно Математическому выражению (6) или Математическому выражению (7). Здесь параметры α и α1 представляет надежность, z1 представляет местонахождение 1, определяемое вторым преобразователем 124, z2 представляет местонахождение 2, определяемое вторым оценивающим модулем 126, и параметр α2 представляет величину корреляцию относительно сканированной искусственной вставки в изображение.
Математическое выражение 6

На фиг. 14 представлена логическая схема, показывающая пример последовательности операций устройства 120A для отслеживания движущегося объекта в составе устройства 100A для обработки медицинских изображений. Описание этапов от этапа S200 по этап S206 включительно является таким же, как описание соответствующих этапов последовательности операций, показанной на фиг. 9, и потому будет опущено.
Модуль 125 определения надежности осуществляет определение надежности на основе второго вероятностного изображения после операции этапа S202 (этапа S208). Второй оценивающий модуль 126 выполняет оценку второго местонахождения на основе второго изображения после выполнения операций этапа S200 (этапа S210). Решающий модуль 127 определяет местонахождение мишени на основе результатов выполнения операций этапа S206, этапа S208 и этапа S210 (этапа S212). Тем самым, выполнение процедуры согласно этой логической схеме завершается.
Как описано выше, устройство 100A для обработки медицинских изображений согласно второму варианту может определить надежность второго вероятностного изображения, поступившего от генератора 122 второго вероятностного изображения, и определить местонахождение мишени на основе надежности или остановить определение, даже если второе вероятностное изображение, сформированное генератором 122 второго вероятностного изображения, входящим в состав устройства 120A для отслеживания движущегося объекта, не достигло желаемого результата в случае, когда структура прозрачного изображения, которая не появилась в пределах первого изображения в обучающемся устройстве 110, появляется при захвате второго изображения, иными словами, реализовать устойчивость (надежная стабильность), в дополнение к получению такого же эффекта, как в устройстве 100 для обработки медицинских изображений согласно первому варианту.
Третий вариант
В дальнейшем здесь будет описан третий вариант. Будет рассмотрено устройство 120B для отслеживания движущегося объекта согласно третьему варианту.
На фиг. 15 представлена блок-схема, показывающая конфигурацию устройства 120B для отслеживания движущегося объекта согласно третьему варианту. Последующее описание будут сфокусировано на различиях между устройством 120A для отслеживания движущегося объекта согласно второму варианту и устройством 120B для отслеживания движущегося объекта согласно третьему варианту.
Второй оценивающий модуль 126 из состава устройства 120B для отслеживания движущегося объекта оценивает местонахождение мишени в пределах второго изображения на основе второго изображения, поступившего от модуля 121 получения второго изображения, и величины надежности, поступившей от модуля 125 определения надежности, обновляет параметр оценки, необходимый для оценки местонахождения мишени во втором оценивающем модуле 126, и передает результат оценки решающему модулю127. Поскольку, в общем случае, в теле пациента P происходят изменения во времени, желательно, чтобы изображение шаблона, используемого во втором оценивающем модуле 126, обновлялось до изображения, в котором отражено самое новейшее состояние. Соответственно, устройство 120B для отслеживания движущегося объекта управляет запоминающим устройством 128 для сохранения парциального изображения, ассоциированного с высокой надежностью, найденной модулем 125 определения надежности, в качестве изображения шаблона.
На фиг. 16 представлена логическая схема, показывающая пример последовательности операций устройства 120B для отслеживания движущегося объекта из состава устройства 100B для обработки медицинских изображений. Описание этапов, таких же, как в последовательностях операций, показанных на фиг. 9 и фиг. 14 будет опущено.
После выполнения операции этапа S212, второй оценивающий модуль 126 определяет и сохраняет параметр оценки (этап S214). Тем самым, выполнение процедуры согласно этой логической схеме завершается.
Как описано выше, устройство 100B для обработки медицинских изображений согласно третьему варианту может обновить изображение шаблона до изображения шаблона, обладающего высокой надежностью, с целью определить местонахождение мишени путем отражения самого новейшего состояния затронутой части тела пациента P в дополнение к получению такого же эффекта, как в устройстве 100A для обработки медицинских изображений согласно второму варианту.
Согласно по меньшей мере одному из описанных выше вариантов можно быстро отслеживать местонахождение мишени с высокой точностью на основе прозрачного изображения TI пациента P, облучаемого в ходе лучевой терапии, путем использования обучающегося устройства 110, которое обучается по местонахождению мишени, найденному во время планирования лечения, и определяет параметр CP преобразования и параметр RCP обратного преобразования, используемые при определении местонахождения мишени в составе прозрачного изображение TI, и параметр LP вычисления вероятности, используемый для определения вероятности в пределах прозрачного изображения, и устройства 120 для отслеживания движущегося объекта, которое определяет местонахождение мишени с использованием вероятности в составе прозрачного изображения TI, полученного, когда происходит облучение терапевтическим лучом B, с использованием прозрачного изображения TI, полученного, когда происходит облучение терапевтическим лучом B, и разнообразных параметров, определяемых обучающимся устройством 110.
Хотя выше были рассмотрены несколько вариантов настоящего изобретения, предполагается, что эти варианты являются всего лишь примерами и не предназначены для ограничения объема изобретения. Эти варианты могут быть реализованы в других разнообразных формах, и при этом возможны различные исключения, подстановки и модификации без отклонения от существенных характеристик настоящего изобретения. Эти варианты и их модификации включены в объем и существенные характеристики изобретения и также включены в состав настоящего изобретения и в прилагаемую Формулу изобретения и ее эквиваленты.
Промышленная применимость
Согласно приведенным выше вариантам можно создать устройство для обработки медицинских изображений, систему лучевой терапии и программу для обработки медицинского изображения, которые могут легко проверить положение пациента в ходе операции приведения пациента в заданное положение, выполняемой прежде инициирования лучевой обработки.
Список позиционных обозначений
1 Система лучевой терапии
10 Лечебное устройство
100, 100A, 100B Устройство для обработки медицинских изображений
110 Обучающееся устройство
111 Модуль получения первого изображения
111a Модуль получения изображения маски
111b Модуль установления локальной области
112 Модуль получения первых местонахождений
113 Первый преобразователь
114 Генератор первого вероятностного изображения
115 Обучающийся модуль
116 Запоминающее устройство параметров
120, 120A, 120B Устройство для отслеживания движущегося объекта
121 Модуль получения второго изображения
122 Генератор второго вероятностного изображения
123 Первый оценивающий модуль
124 Второй преобразователь
125 Модуль определения надежности
126 Второй оценивающий модуль
127 Решающий модуль
128 Запоминающее устройство
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ, СИСТЕМА ТЕРАПИИ И НОСИТЕЛЬ ДЛЯ ХРАНЕНИЯ ИНФОРМАЦИИ | 2019 |
|
RU2761269C1 |
| НЕЙРОННАЯ СЕТЬ ДЛЯ ГЕНЕРАЦИИ СИНТЕТИЧЕСКИХ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2698997C1 |
| СОЗДАНИЕ ПОДХОДЯЩЕЙ МОДЕЛИ ДЛЯ ОЦЕНКИ ДОЗЫ ОБЛУЧЕНИЯ ПАЦИЕНТА В РЕЗУЛЬТАТЕ СКАНИРОВАНИЙ ДЛЯ МЕДИЦИНСКОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2725751C2 |
| СОЗДАНИЕ ПОДХОДЯЩЕЙ МОДЕЛИ ДЛЯ ОЦЕНКИ ДОЗЫ ОБЛУЧЕНИЯ ПАЦИЕНТА В РЕЗУЛЬТАТЕ СКАНИРОВАНИЙ ДЛЯ МЕДИЦИНСКОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2592247C2 |
| ОБНАРУЖЕНИЕ ИЗМЕНЕНИЙ НА МЕДИЦИНСКИХ ИЗОБРАЖЕНИЯХ | 2017 |
|
RU2752690C2 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА АНАЛИЗА МЕДИЦИНСКОГО ИЗОБРАЖЕНИЯ | 2023 |
|
RU2838577C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ЛЕЧЕНИЯ | 2015 |
|
RU2684173C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ В РЕАЛЬНОМ ВРЕМЕНИ | 2017 |
|
RU2719024C1 |
| ПРОЦЕСС ОБРАБОТКИ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2681280C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ АНАЛИЗА МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2022 |
|
RU2806982C1 |
Изобретение относится к области вычислительной техники для обработки медицинских изображений. Технический результат заключается в более быстрой и точной оценке местонахождения мишени в теле пациента на основе прозрачных изображений пациента. Устройство для обработки медицинских изображений содержит модуль получения первых местонахождений, первый преобразователь, генератор первого вероятностного изображения и обучающийся модуль. Модуль получения первых местонахождений конфигурирован для получения местонахождений мишени в пределах нескольких первых изображений. Первый преобразователь конфигурирован для преобразования первых местонахождений во вторые местонахождения путем расширения перемещения во втором направлении. Генератор первого вероятностного изображения конфигурирован для генерации первого вероятностного изображения, показывающего распределение вероятностей вторых местонахождений. Обучающийся модуль конфигурирован для передачи на выход модели и после прозрачного изображения определяет второе вероятностное изображение, показывающее распределение вероятности, обозначающее вероятность части или всего прозрачного изображения, соответствующего вторым местонахождениям. 3 н. и 8 з.п. ф-лы, 16 ил.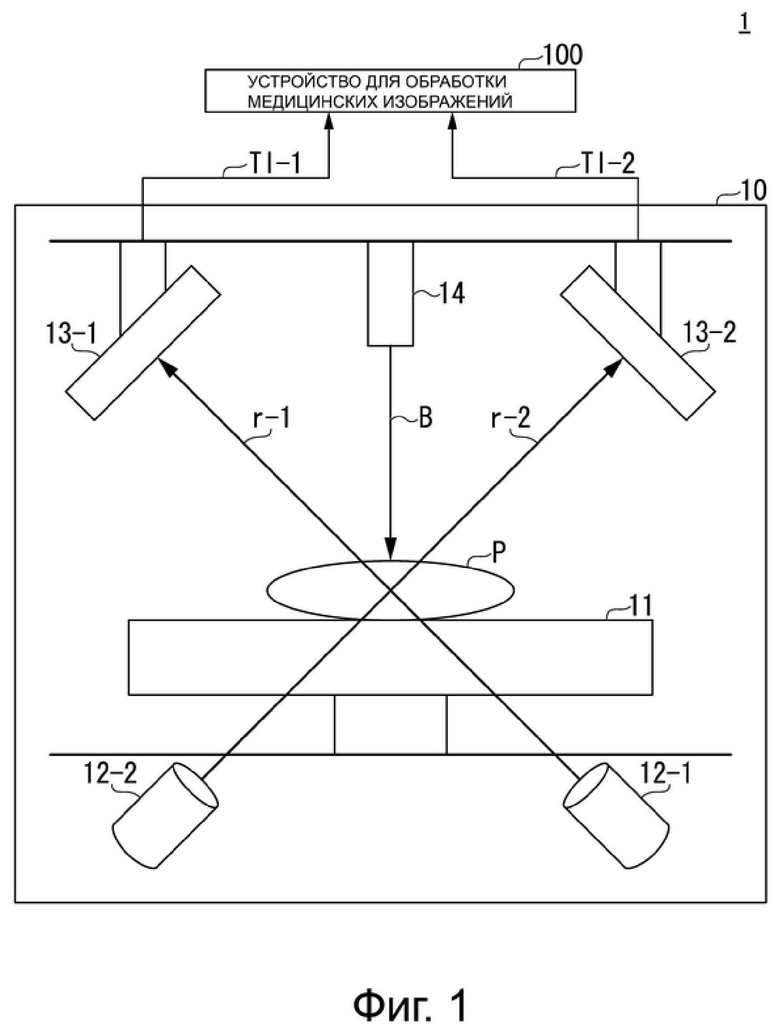
1. Устройство для обработки медицинских изображений, содержащее:
модуль получения первых местонахождений, конфигурированный для получения, в качестве первых местонахождений, местонахождений мишени в пределах нескольких первых изображений, представляющих собой прозрачные изображения, для нескольких моментов времени, в которые производился захват изображений пациента;
первый преобразователь, конфигурированный для преобразования первых местонахождений в пределах нескольких первых изображений во вторые местонахождения путем расширения перемещения во втором направлении, пересекающем первое направление, в котором перемещение первых местонахождений во времени велико;
генератор первого вероятностного изображения, конфигурированный для генерации первого вероятностного изображения, показывающего распределение вероятностей, обозначающее вероятности, соответствующие вторым местонахождениям на основе этих вторых местонахождений; и
обучающийся модуль, конфигурированный для передачи на выход модели, которая использует некоторые или все из совокупности нескольких первых изображений и первое вероятностное изображение в качестве настроечных данных и после приема части или всего прозрачного изображения определяет второе вероятностное изображение, показывающее распределение вероятности, обозначающее вероятность части или всего прозрачного изображения, соответствующего вторым местонахождениям.
2. Устройство для обработки медицинских изображений по п. 1, дополнительно содержащее:
модуль получения второго изображения, конфигурированный для получения вторых изображений, представляющих собой прозрачные изображения, захваченные в различные моменты времени из совокупности моментов времени, в которые осуществлялся захват первых изображений;
генератор второго вероятностного изображения, конфигурированный для генерации второго вероятностного изображения посредством ввода некоторых или всех вторых изображений в модель;
первый оценивающий модуль, конфигурированный для оценки вторых местонахождений в пределах вторых изображений на основе второго вероятностного изображения; и
второй преобразователь, конфигурированный для преобразования вторых местонахождений, полученных в результате оценки первым оценивающим модулем в направлении, обратном преобразованию, осуществляемому первым преобразователем, и передачи на выход преобразованных вторых местонахождений в качестве местонахождений мишени в теле пациента в пределах вторых изображений.
3. Устройство для обработки медицинских изображений по п. 2, дополнительно содержащее модуль определения надежности, конфигурированный для определения надежности вторых местонахождений на основе распределения вероятностей в пределах второго вероятностного изображения.
4. Устройство для обработки медицинских изображений по п. 3, дополнительно содержащее второй оценивающий модуль, конфигурированный для выделения парциальных изображений, ассоциированных с первыми местонахождениями или вторыми местонахождениями в пределах вторых изображений или с местонахождениями, обратно преобразованными из вторых местонахождений на основе надежности, управления запоминающим устройством для сохранения парциальных изображений и оценки местонахождений мишени в теле пациента в пределах вторых изображений на основе степени совпадения между некоторыми вторыми изображениями и парциальными изображениями.
5. Устройство для обработки медицинских изображений по п. 4, дополнительно содержащее третий оценивающий модуль, конфигурированный для оценки третьих местонахождений на основе местонахождений мишени в теле пациента, поступивших от преобразователя, местонахождения мишени в теле пациента, полученного в результате оценки вторым оценивающим модулем, надежности и степени совпадения.
6. Устройство для обработки медицинских изображений по п. 1, отличающееся тем, что первый преобразователь конфигурирован для преобразования первых местонахождений во вторые местонахождения с использованием матрицы преобразования, установленной на основе перемещения первых местонахождений во времени.
7. Устройство для обработки медицинских изображений по п. 2, дополнительно содержащее модуль установления локальной области, конфигурированный для установления одной или нескольких локальных областей в пределах первых изображений на основе величин пикселей этих первых изображений,
где по меньшей мере одна из этих локальных областей ассоциирована с первым вероятностным изображением, и
обучающийся модуль конфигурирован для регрессионного обучения второму вероятностному изображению с использованием изображения локальной области, с которой не ассоциировано первое вероятностное изображение, и изображения локальной области, с которой ассоциировано первое вероятностное изображение, в качестве настроечных данных.
8. Устройство для обработки медицинских изображений по п. 7, отличающееся тем, что модуль установления локальной области конфигурирован для установления локальных областей, ассоциированных с первым вероятностным изображением, таким образом, чтобы они содержали траектории первых местонахождений в пределах совокупности нескольких первых изображений, соответствующих разным фазам дыхания, и установления локальных областей на основе яркостей первых изображений.
9. Устройство для обработки медицинских изображений по п. 7, дополнительно содержащее модуль получения изображения маски, конфигурированный для получения изображения маски, представляющей область, в которой на первых изображениях захвачен предмет, не являющийся главным предметом прозрачных изображений,
где модуль установления локальной области конфигурирован для выбора локальной области, в какой область, где захвачен предмет, мала, и выбранная область представлена изображением маски.
10. Способ обработки медицинских изображений с использованием устройства обработки медицинских изображений, содержащий:
получение указаний первых местонахождений на основе совокупности нескольких первых изображений, представляющих собой прозрачные изображения для нескольких моментов времени, в которые осуществлялся захват изображений пациента;
преобразование указанных нескольких первых местонахождений в несколько вторых местонахождений посредством расширения распределения совокупности нескольких первых местонахождений, полученных на основе нескольких первых изображений, во втором направлении, пересекающем первое направление, в котором перемещение первых местонахождений во времени велико;
генерацию первого вероятностного изображения на основе совокупности нескольких вторых местонахождений и
передачу на выход модели, которая содержит полученное путем регрессионного обучения первое вероятностное изображение на основе прозрачных изображений и определяет вероятностное изображение для первых местонахождений после приема прозрачных изображений.
11. Носитель данных, содержащий записанную на нем программу, при выполнении которой устройство обработки медицинских изображений:
получает первые местонахождения на основе совокупности нескольких первых изображений, представляющих собой прозрачные изображения для нескольких моментов времени, в которые осуществлялся захват изображений пациента;
преобразует указанные несколько первых местонахождений в несколько вторых местонахождений посредством расширения распределения совокупности нескольких первых местонахождений, полученных на основе нескольких первых изображений, во втором направлении, пересекающем первое направление, в котором перемещение первых местонахождений во времени велико;
генерирует первое вероятностное изображение на основе совокупности нескольких вторых местонахождений и
передает на выход модель, которая содержит полученное путем регрессионного обучения первое вероятностное изображение на основе прозрачных изображений и определяет вероятностное изображение для первых местонахождений после приема прозрачных изображений.
| JP 2018029852 A, 01.03.2018 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| JP 2017042247 A, 02.03.2017 | |||
| СИСТЕМА ФОРМИРОВАНИЯ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ, РЕАЛИЗОВАННЫЙ НА КОМПЬЮТЕРЕ СПОСОБ И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ ПРОДУКТ ДЛЯ ИДЕНТИФИКАЦИИ ОБРАБАТЫВАЕМОЙ ОБЛАСТИ НА МЕДИЦИНСКОМ ИЗОБРАЖЕНИИ | 2011 |
|
RU2584770C2 |

