Изобретение относится к приборостроительной технике и может быть использовано на летательных аппаратах (ЛА) для обработки, хранения, отображения и передачи полетной информации на наземные пункты управления.
Известна интегрированная система регистрации данных, диагностики технического и физического состояния комплекса «человек-машина» (патент РФ №2711109 кл. G01D 9/28, 2020).
Эта система содержит подсистему регистрации данных ЛА, блок схема информации, блок накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, блок диагностирования физического состояния пилота, блок подготовки полетной информации для передачи на наземные пункты управления, и устройство измерения несоконусности лопастей несущего винта, устройство динамической балансировки несущего винта, устройство для индикации срыва потока на лопастях несущего винта, соединенные определенным образом. Недостатком системы является недостаточная безопасность и надежность в эксплуатации.
Наиболее близким к заявляемому решению, взятым за прототип, является интегрированная система регистрации данных, диагностики технического и физического состояния комплекса «человек-машина», (патент РФ №2735067, кл. G01D 9/28, 2020). Технический результат предлагаемого изобретения заключается в повышении безопасности и надежности эксплуатации системы в составе ЛА (особенно вертолетов).
Технический результат изобретения заключается в повышении безопасности и надежности эксплуатации системы в составе летательного аппарата.
Технический результат достигается тем, что интегрированная система регистрации данных, диагностики технического и физического состояния комплекса «человек-машина», содержащая подсистему регистрации данных ЛА, блок съема информации, блок накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, блок диагностирования физического состояния пилота, блок подготовки полетной информации для передачи на наземные пункты управления, устройство измерения несоконусности лопастей несущего винта, устройство для динамической балансировки несущего винта, устройство контроля приближения к режиму «вихревое кольцо», устройство для индикации срыва потока на лопастях несущего винта, причем первый, второй и третий входы подсистемы регистрации данных ЛА соединены с датчиками и цифровыми линиями связи системы ЛА для подсистемы регистрации, четвертый, пятый и шестой входы подключены к наземной аппаратуре обработки информации, бортовому пульту управления ЛА и бортовым источником звуковой информации ЛА соответственно, седьмой и восьмой входы соединены со вторыми выходами блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА и блока диагностирования физического состояния пилота, соответственно, первый, второй и третий выходы подсистемы регистрации данных ЛА подключены к бортовой системе отображения информации, к наземной аппаратуре обработки информации и первому входу блока съема информации соответственно, четвертый выход подсистемы регистрации данных ЛА соединен с четвертыми входами блоков накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, блока диагностирования физического состояния пилота, несоконусности лопастей несущего винта, устройства для динамической балансировки несущего винта и устройства для индикации срыва потока на лопастях несущего винта, второй и третий входы блока съема информации подключены к первым выходам блока диагностирования физического состояния пилота и блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА соответственно, выход блока съема информации соединен с входом блока подготовки полетной информации для передачи на наземные пункты управления, первый и второй выходы которого подключены к передатчику КВ-диапазона и к спутниковой системе связи соответственно, первый, второй и третий входы блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА соединены с датчиками диагностирования состояния элементов и агрегатов ЛА, первый, второй и третий входы блока диагностирования физического состояния пилота подключены к датчикам диагностирования физического состояния пилота, первый, второй и третий входы устройства измерения несоконусности лопастей несущего винта соединены с датчиками измерения несоконусности лопастей несущего винта, первый и второй выходы которого подключены к четвертому входу блока съема информации и к девятому входу подсистемы регистрации данных Л А соответственно, первый второй и третий входы устройства для индикации срыва потока на лопастях несущего винта соединены с датчиками определения срыва динамической балансировки несущего винта подключены к датчикам оценки потока на лопастях несущего винта, первый и второй выходы устройства для индикации срыва потока на лопастях несущего винта подключены к пятому входу блока съема информации и десятому входу подсистемы регистрации данных ЛА соответственно, первый, второй и третий входы устройства для динамической балансировки несущего винта, первый и второй выходы устройства для динамической балансировки несущего винта соединены с шестым входом блока съема информации и одиннадцатым входом подсистемы регистрации данных ЛА соответственно, на первый вход устройства контроля приближения к режиму «вихревое кольцо» подключены значения вертикальной скорости вертолета, на второй вход – значения угла тангажа, на четвертый вход - значения угла отклонения автомата перекоса в продольном направлении, четвертый выход подсистемы регистрации данных ЛА подключен к пятому входу устройства контроля приближения к режиму «вихревое кольцо», а первый, второй и третий выходы последнего соединены с двенадцатым входом подсистемы регистрации данных ЛА, с седьмым входом блока съема информации и с системой автоматического управления ЛА соответственно, отличающаяся тем, что снабжена подсистемой предупреждения режима «подхват вертолета» , на первый, второй и третий входы которого подключены сигналы от аэродинамического, спутникового и определения угла пространственного положения каналов соответственно, четвертый вход подсистемы предупреждения режима «подхват вертолета» подключен к четвертому выходу подсистемы регистрации данных, первый, второй и третий выходы подсистемы предупреждения режима «подхват вертолета» соединены с тринадцатым входом подсистемы регистрации данных, восьмым входом блока съема информации и системой автоматического управления ЛА соответственно.
Сущность изобретения поясняется чертежом, где представлена структурная схема интегрированной системы регистрации данных, диагностики технического и физического состояния комплекса «человек-машина».
Система состоит из подсистемы 1 регистрации данных ЛА, выполненной на базе микросхем коммутаторов, аналого-цифровых преобразователей (АЦП), микропроцессоров и микросхем энергонезависимой памяти, блока 2 съема информации, в состав которого входят микропроцессор и адаптер записи информации на съемную кассету с энергонезависимой памятью, блока 3 накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, который может быть выполнен на базе микросхем АЦП, программируемой логики (ПЛИС), микропроцессоров, блока 4 диагностирования физического состояния пилота, который может быть выполнен на базе микросхем АЦП, ПЛИС, источников и приемников светового излучения, блока 5 подготовки полетной информации для передачи на наземные пункты управления, который может быть выполнен на основе микропроцессора и адаптеров кодов для КВ-диапазона и спутниковой линии связи. Принцип работы устройства 6 измерения несоконусности лопастей несущего винта заключается в формировании видеокадров координат законцовок лопастей несущего винта вертолета в условиях полета с определением и фиксацией значений амплитуд сигналов от законцовок всех лопастей несущего винта. По результатам измерений выдаются рекомендации по необходимости введения корректур в процесс механических регулировок лопастей. Устройство 6 может быть выполнено на базе оптического излучателя, фотоприемного устройства, узла обработки видеосигнала, содержащего АЦП, микроконтроллер, пороговое устройство (компараторы), формирователи последовательного кода для передачи текущей информации для регистрации в блоке 2 и бортовую систему отображения информации (например, патент РФ №2180122, 2002, патент РФ №2415053, 2011).
Устройство 7 динамической балансировки несущего винта может быть выполнено с помощью опто-электронных средств измерения для достижения такого распределения веса лопастей, которое обеспечит нормальную работу во всех режимах. Оно может содержать оптическую головку, фотоприемное устройство, АЦП, компаратор, блок обработки видеосигнала, полосовые фильтры, преобразователь Фурье и блок анализа разбалансировки (например, патент РФ №2441807, 2012).
Устройство 8 для индикации срыва потока на лопастях несущего винта обеспечивает измерение сигналов датчиков, изменяющихся в зависимости от появления срыва воздушного потока. Устройство может быть реализовано с использованием волоконно-оптических датчиков, оптических соединителей и кабелей, источников света, блок волоконно-оптической коммутации, блока анализа информации, блока спектрального анализа и ЦАП с размещением датчиков на автомате перекоса (например, патент РФ №2555258, 2015).
Устройство 9 контроля приближения к режиму «вихревое кольцо» обеспечивает расчет текущих значений выходных параметров по заданным формулам по значениям входных параметров вертикальной скорости, угла тангажа и угла отклонения автомата перекоса в продольном направлении и сравнивает полученные расчетные значения с граничными значениями параметров зоны режима «вихревое кольцо» хранящиеся в памяти устройства 9 для данного типа ЛА и при превышении граничных значений параметров формируются сигналы тревоги и передаются через подсистему 1 на бортовую систему отображения аварийной информации пилоту, который согласно инструкции парирует органами управления ЛА создавшуюся ситуацию. Одновременно аварийный сигнал устройства 9 подается на систему автоматического управления ЛА, которое по заданным алгоритмам автоматически выводит ЛА из зоны режима «вихревое кольцо».
Устройство 9 может быть реализовано на базе микросхем АЦП, микропроцессора и микросхем энергонезависимой памяти (например, патент РФ №2486596, 2013) с математическим аппаратом описанном в указанном патенте.
Подсистема 10 предупреждения режима «подхват вертолета» обеспечивает предупреждение критических режимов:
- на стоянке вертолета до запуска силовой установки и раскрутки трансмиссии посредством измерений скорости и направления ветра относительно продольной оси вертолета, температуры и атмосферного давления, стояночных углов крена и тангажа, просадки амортизаторов стоек шасси и давления в колесах;
- на стоянке при запуске силовой установки и раскрутки трансмиссии измеряются значения углов крена и тангажа, направления и скорости ветра, температуры и атмосферного давления;
- при рулении по ВВП обеспечивается измерение боковой и продольной составляющей скорости ветра, скорости движения вертолета, значений углов крена и тангажа;
- на режиме висения измеряются боковая и продольная составляющие скорости ветра с учетом бокового и продольного смещения вертолета относительно ВВПП, продольная и боковые составляющие скорости смещения вертолета относительно земли;
- на режиме снижения обеспечиваются измерение углов крена и тангажа и отображение траектории снижения относительно горизонта.
На всех перечисленных режимах обеспечиваются определение допустимых сочетаний текущих значений аэродинамических параметров и параметров угловой ориентации, а также предупреждения и аварийная сигнализация при достижении летных ограничений, установленных РЛЭ вертолета.
Расчет сигналов предупреждения и своевременной сигнализации на каждом из перечисленных режимов обеспечивается алгоритмами заложенными в процессорные блоки подсистемы. Подсистема может быть реализована на базе акселерометров, блоков датчиков угловой скорости, блоков магнитометров, блоков преобразования, процессоров, приемника спутниковой системы, каналов индикации текущих и допустимых значений критических параметров, эксплуатационных ограничений и сигнализации (например, патент РФ №2497718, 2013).
Система работает следующим образом. Информация, поступающая от датчиков и цифровых линий систем ЛА на входы 1, 2, 3 подсистемы 1 преобразуется в цифровой код.
Из информации по определенной для конкретного объекта применения программе формируется и запоминается сообщение в виде информационного подкадра. На вход 5 подсистемы 1 с бортового пульта вводятся опознавательные данные (номера блоков, дата, время и т.д.), которые так же записываются в информационные подкадры и запоминаются в защищенном накопителе, входящим в состав подсистемы 1. Одновременно записывается звуковая информация, поступающая по входу 6. Каждый подкадр оцифровывается по времени цифровыми метками, которые с выхода 4 подсистемы 1 поступают на входы 4 блоков 3, 4, устройств 6, 7, 8, вход 5 устройства 9 и вход 4 подсистемы 10.
Информация в виде подкадров оцифровывается по времени и передается с выхода 3 подсистемы 1 на вход 1 блока 2. В блоке 2 производится подкадровая запись и хранение информации, которая записывается в специально выделенную зону съемной кассеты памяти. В другие зоны съемной кассеты памяти производится подкадровая запись информации, оцифрованной временными метками, по входу 2 блока 2 с выхода 1 блока 4, по входу 3 с выхода 1 блока 3, по входу 4 с выхода 1 устройства 6, по входу 6 с выхода 1 устройства 7, по входу 5 с выхода 1 устройства 8, по входу 7 с выхода 2 устройства 9 и по входу 8 с выхода 2 подсистемы 10.
В блоке 3 и 4 и устройствах 6, 7, 8, 9 и подсистемы 10 информация от датчиков преобразуется в цифровой код с формированием подкадров, их оцифровкой по времени и передачей в блок 2 для записи в съемную кассету памяти. При наземной обработке диагностической информации показания датчиков, записанные на съемной кассете памяти блока 2 в процессе последнего полета, обрабатываются с помощью специальных алгоритмов, использующих статистические данные, накопленные во время предыдущих полетов данного ЛА. По результатам обработки составляется прогноз возможного времени наступления отказов ЛА с уточнением конкретных узлов (агрегатов, систем), находящихся в предотказном состоянии.
В подсистеме 1, блоках 3, 4 и устройствах 6, 7, 8 ,9 и подсистеме 10 при работе обеспечивается периодических тестовый контроль работы, который с выходов 2 устройств 6, 7 и 8 подается на входы 9, 11 и 10 подсистемы 1, соответственно, с выхода 2 блока 4 на вход 8 подсистемы 1, с выхода 2 блока 3 на вход 7 подсистемы 1, с выхода 1 устройства 9 на вход 12 подсистемы 1 и с выхода 1 подсистемы 10 на вход 13 подсистемы 1.
Результаты тестового контроля в подсистеме 1 записываются в подкадр и передаются с выхода 3 на вход 1 блока 2 и выводятся с выхода 1 на бортовую систему отображения информации. В подсистеме 1, блоках 3, 4 и устройствах 6, 7, 8, 9 и подсистеме 10 записываются предаварийные режимы сигналов, выше и ниже допустимых уровней которых формируются сигналы предаварийных ситуаций, эти сигналы поступают в подсистему 1 по каналам тестового контроля, описанного выше и также записываются в подкадр, формируемый подсистемой 1 и выводятся на бортовую систему отображения информации через выход 1. Подкадры с подсистемы 1 блоков 3, 4, устройств 6, 7, 8, 9 и подсистемы 10 поступают в блок 2, где формируются единые кадры записи всей информации системы, которые записываются в съемную кассету памяти блока 2. Информация со съемной кассеты памяти блока 2 используется для обработки наземными комплексами с определением состояния бортового оборудования формированием диагностической информации элементов и агрегатов ЛА, определением физического состояния пилота, измерением несоконусности лопастей несущего винта, оценки динамической балансировки несущего винта, определение срыва потока на лопастях несущего винта,, определения приближения к режимам «вихревое кольцо» и «подхват вертолета».. Одновременно с подсистемы 1 на съемную кассету памяти записываются навигационные параметры полета, необходимые для регистрации в случае летных происшествий. Наиболее важная информация, влияющая на безопасность полета в процессе выполнения последнего, с вывода блока 2 поступает на вход блока 5 в котором преобразуется по специальным алгоритмам передачи по беспроводной линии на наземные пункты и с помощью адаптеров кодов формируется объем информации, необходимой для принятия решения руководителями полета и передачи в эфир с выходов 1 и 2.
В системе предусмотрена работа с наземным комплексом обработки не только со съемной кассетой памяти блока 2, но и электрическим подключением его к выходу 2 и входу 4 подсистемы 1 для считывания необходимой информации для наземной обработки. Введение в состав системы подсистемы 10 позволяет повысить безопасность эксплуатации ЛА и определять все параметры работы с целью отображения аварийных ситуаций на бортовой системе отображения информации, передачи этой информации в реальном времени руководителю полета для принятия экстренных мер как пилотом, так и наземными службами обеспечения полетов. Следует отметить, что в зависимости от требований к эксплуатации, каждый ЛА может комплектоваться необходимым набором датчиков и блоков, в нескольких вариантах, т.е. на объекте может устанавливаться необходимая часть описанной интегрированной системы, т.к. блоки 3, 4, 5 и устройства 6, 7, 8, 9 и подсистемы 10 могут работать независимо друг от друга в любой комбинации. Введение подсистемы 10 в систему позволяет обеспечить предупреждение пилота и наземных служб обеспечения полетов о приближении к режиму «подхват вертолета» и выдать в систему автоматического управления ЛА своевременный сигнал для автоматического парирования системой недопущения режима «подхват вертолета».
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2022 |
|
RU2779329C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2020 |
|
RU2735067C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2019 |
|
RU2711109C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2018 |
|
RU2687318C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2017 |
|
RU2650276C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ, ДИАГНОСТИКИ ТЕХНИЧЕСКОГО И ФИЗИЧЕСКОГО СОСТОЯНИЯ КОМПЛЕКСА "ЧЕЛОВЕК - МАШИНА" | 2014 |
|
RU2602350C2 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек - машина" | 2017 |
|
RU2664016C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2010 |
|
RU2441807C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ СРЫВА ПОТОКА НА ЛОПАСТЯХ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2555258C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |

Изобретение относится к приборостроительной технике и может быть использовано на летательных аппаратах (ЛА) для обработки, хранения, отображения и передачи полетной информации на наземные пункты управления. Техническим результатом является повышение безопасности и надежности эксплуатации системы в составе ЛА, особенно вертолетов. Система содержит подсистему регистрации данных ЛА, блок съема информации, блок накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, блок диагностирования физического состояния пилота, блок подготовки полетной информации для передачи на наземные пункты управления, устройство измерения несоконусности лопастей несущего винта, устройство для динамической балансировки несущего винта, устройство для индикации срыва потока на лопастях несущего винта и устройство контроля приближения к режиму «вихревое кольцо» и подсистему предупреждения режима «подхват вертолета». 1 ил.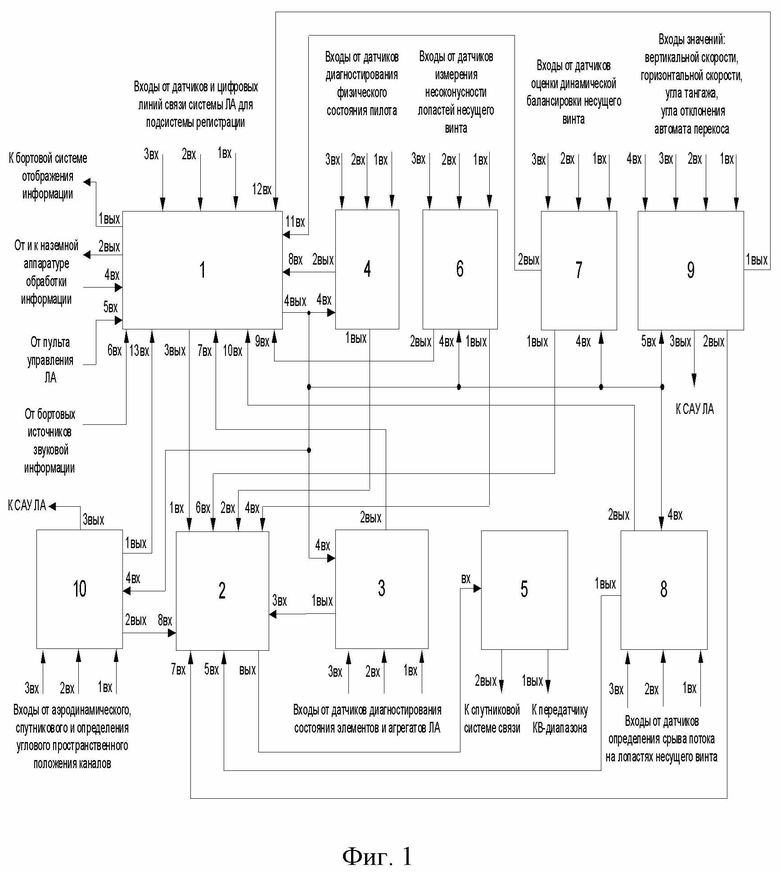
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса «человек-машина», содержащая подсистему регистрации данных ЛА, блок съема информации, блок накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, блок диагностирования физического состояния пилота, блок подготовки полетной информации для передачи на наземные пункты управления, устройство измерения несоконусности лопастей несущего винта, устройство для динамической балансировки несущего винта, устройство контроля приближения к режиму «вихревое кольцо», устройство для индикации срыва потока на лопастях несущего винта, причем первый, второй и третий входы подсистемы регистрации данных ЛА соединены с датчиками и цифровыми линиями связи системы ЛА для подсистемы регистрации, четвертый, пятый и шестой входы подключены к наземной аппаратуре обработки информации, бортовому пульту управления ЛА и бортовым источникам звуковой информации ЛА соответственно, седьмой и восьмой входы соединены со вторыми выходами блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА и блока диагностирования физического состояния пилота соответственно, первый, второй и третий выходы подсистемы регистрации данных ЛА подключены к бортовой системе отображения информации, к наземной аппаратуре обработки информации и первому входу блока съема информации соответственно, четвертый выход подсистемы регистрации данных ЛА соединен с четвертыми входами блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА, блока диагностирования физического состояния пилота, устройства измерения несоконусности лопастей несущего винта, устройства для динамической балансировки несущего винта и устройства для индикации срыва потока на лопастях несущего винта, второй и третий входы блока съема информации подключены к первым выходам блока диагностирования физического состояния пилота и блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА соответственно, выход блока съема информации соединен со входом блока подготовки полетной информации для передачи на наземные пункты управления, первый и второй выходы которого подключены к передатчику КВ-диапазона и к спутниковой системе связи соответственно, первый, второй и третий входы блока накопления и обработки диагностической информации состояния элементов и агрегатов ЛА соединены с датчиками диагностирования состояния элементов и агрегатов ЛА, первый, второй и третий входы блока диагностирования физического состояния пилота подключены к датчикам диагностирования физического состояния пилота, первый, второй и третий входы устройства измерения несоконусности лопастей несущего винта соединены с датчиками измерения несоконусности лопастей несущего винта, первый и второй выходы которого подключены к четвертому входу блока съема информации и к девятому входу подсистемы регистрации данных ЛА соответственно, первый второй и третий входы устройства для индикации срыва потока на лопастях несущего винта соединены с датчиками определения срыва потока на лопастях несущего винта, первый и второй выходы устройства для индикации срыва потока на лопастях несущего винта подключены к пятому входу блока съема информации и десятому входу подсистемы регистрации данных ЛА соответственно, первый, второй и третий входы устройства для динамической балансировки несущего винта подключены к датчикам оценки динамической балансировки несущего винта, первый и второй выходы устройства для динамической балансировки несущего винта соединены с шестым входом блока съема информации и одиннадцатым входом подсистемы регистрации данных ЛА соответственно, на первый вход устройства контроля приближения к режиму «вихревое кольцо» подключаются значения вертикальной скорости вертолета, на второй вход - значения горизонтальной скорости воздушного потока, на третий вход - значения угла тангажа, на четвертый вход - значения угла отклонения автомата перекоса в продольном направлении, четвертый выход подсистемы регистрации данных ЛА подключен к пятому входу устройства контроля приближения к режиму «вихревое кольцо», а первый, второй и третий выходы последнего соединены с двенадцатым входом подсистемы регистрации данных ЛА, с седьмым входом блока съема информации и системой автоматического управления ЛА соответственно, отличающаяся тем, что снабжена подсистемой предупреждения режима «подхват вертолета», на первый, второй и третий входы которой подключаются сигналы от аэродинамического, спутникового и определения углового пространственного положения каналов соответственно, четвертый вход подсистемы предупреждения режима «подхват вертолета» подключен к четвертому выходу подсистемы регистрации данных, первый, второй и третий выходы подсистемы предупреждения режима «подхват вертолета» соединены с тринадцатым входом подсистемы регистрации данных, восьмым входом блока съема информации и системой автоматического управления ЛА соответственно.
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2020 |
|
RU2735067C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2019 |
|
RU2711109C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2017 |
|
RU2650276C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек - машина" | 2017 |
|
RU2664016C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ, ДИАГНОСТИКИ ТЕХНИЧЕСКОГО И ФИЗИЧЕСКОГО СОСТОЯНИЯ КОМПЛЕКСА "ЧЕЛОВЕК - МАШИНА" | 2014 |
|
RU2602350C2 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| US 10535272 B2, 14.01.2020 | |||
| US 20160318622 A1, 03.11.2016. | |||

