Изобретение относится к устройствам обеспечения безопасности и предупреждения летных происшествий одновинтовых вертолетов на стартовых и взлетно-посадочных режимах.
Известны системы предупреждения критических режимов самолета и других летательных аппаратов, в которых реализуется принцип ограничения характерных для конкретного режима критических параметров полета - угол атаки, число Маха-Маевского, приборная и вертикальная воздушные скорости, вертикальное ускорение (перегрузка) и др. (Солдаткин В.М., «Методы и средства построения бортовых информационно-управляющих систем обеспечения безопасности полета», Казань, Изд-во Казан, гос. техн. ун-та, 2004, стр.82-84 - Приложение 1; патенты США №№6917860, G01C 23/00, опубл. 12.07.2005, №6650972, G01C 23/00, опубл. 18.11.2003).
С помощью каналов измерения (датчиков) определяются текущие значения характерных критических параметров полета летательного аппарата, которые сравниваются с допустимыми значениями указанных параметров, определяемых в канале формирования эксплуатационных ограничений. Текущие и допустимые значения характерных критических параметров на каждом этапе полета отображаются в канале индикации с помощью автономных индикаторов или на экране системы электронной индикации, формируя экипажу визуальную информацию о приближении к опасным режимам полета летательного аппарата.
При приближении текущих значений характерных критических параметров полета к границам эксплуатационных ограничений включается в работу канал сигнализации, формируя световые, звуковые или тактильные предупреждающие сигналы экипажу о приближении к границам опасного режима полета. В соответствии с предупреждающими сигналами канала сигнализации экипаж через соответствующие органы управления изменяет параметры движения летательного аппарата, предотвращая опасные и критические режимы полета и возникновение летных происшествий (см., например, заявку Германии №4140943, G01P 1/10, опубл. 17.06.1993, патент США №6608568, B64D 43/02; опубл. 19.08.2003).
В известной системе предупреждения критических режимов вертолета типа СОС-В1-800, взятой за прототип (Макаров Н.Н., «Системы обеспечения безопасности функционирования бортового эргатического комплекса: теория, проектирование, применение // Под ред. доктора техн. наук В.М. Солдаткина. М.: Машиностроение / Машиностроение - Полет, 2009,. стр.295-298 - Приложение 2), использован принцип ограничения на отдельные критические параметры полета - приборная воздушная скорость, вертикальная скорость, нормальная перегрузка. Влияние других параметров на уровень безопасности полета вертолета, в частности, боковой скорости, углов атаки и скольжения при пространственных маневрах косвенно учитывается в ограничениях, накладываемых на максимальные значения приборной и вертикальной скоростей и нормальную перегрузку.
Аналогично системе предупреждения критических режимов самолета система ограничительных сигналов СОС-В1-800 содержит каналы измерения характерных критических параметров - приборной воздушной скорости, вертикальной скорости и нормальной перегрузки, канал формирования допустимых значений критических параметров (эксплуатационных ограничений), канал индикации текущих и допустимых значений критических параметров и канал сигнализации, предупреждающий экипаж о приближении к опасным режимам полета.
Система ограничительных сигналов СОС-В1-800 обеспечивает формирование экипажу вертолета предупреждающих сигналов о превышении максимально допустимой вертикальной перегрузки, об опасном сочетании вертикальной скорости, боковой и продольной составляющих вектора воздушной скорости и об опасности попадания в режим «вихревого кольца», о превышении максимально допустимой приборной скорости. При этом информация о приближении к границам допустимых эксплуатационных режимов выдается как по каналу предупреждающей сигнализации, так и через средства канала индикации.
Использование системы предупреждения критических режимов вертолета типа СОС-В1-800 позволяет предотвратить такие опасные режимы полета вертолета как «подхват вертолета», возникающий вследствие срыва потока на лопастях несущего винта при больших вертикальных (нормальных) ускорениях, режим «вихревого кольца» при снижении вертолета по вертикальной траектории при неблагоприятных сочетаниях вертикальной скорости, боковой и продольной составляющих вектора воздушной скорости, на предельных режимах по максимальной приборной воздушной скорости, когда также возможны срывы потока с лопасти или потеря аэродинамической устойчивости несущего винта (см. также патент РФ №2352914, G01M 17/00, опубл. 20.04.2009).
Однако такая система предупреждения критических режимов не обеспечивает безопасную эксплуатацию одновинтовых вертолетов и предотвращение летных происшествий на стоянке, при рулении и маневрировании по земной поверхности, на взлете и при посадке, на режимах снижения и висения, т.е. на стартовых и взлетно-посадочных режимах.
По данным Межгосударственного авиационного комитета (МАК), около 20…25% летных происшествий одновинтовых вертолетов, например, Ми-8 и его модификаций связаны с опрокидыванием вертолета на бок, соударением несущего винта с земной поверхностью и с хвостовой балкой, соударением рулевого винта с поверхностью стартовой или взлетно-посадочной площадки при превышении установленных Руководством по летной эксплуатации (РЛЭ) ограничений по скорости и направлению ветра, по продольной и боковой составляющим вектора скорости ветра, по углам крена и тангажа. Это происходит вследствие отсутствия информации о пространственной ориентации вертолета на стоянке, при рулении и маневрировании по земной поверхности, на взлете и при посадке, на режимах снижения и висения.
Это определяет необходимость применения на одновинтовых вертолетах стартовой системы предупреждения критических режимов, обеспечивающей информационную поддержку экипажа для безопасности эксплуатирования вертолета на стоянке, стартовых и взлетно-посадочных режимах при воздействии различных неблагоприятных факторов: опасные значения скорости и направления ветра, опасные значения продольной и боковой составляющих вектора скорости ветра, опасные углы наклона стояночной и взлетно-посадочной площадок, опасные углы крена и тангажа вертолета, неопределенность фактической траектории взлета, снижения и посадки, с последующим определением допустимых по критерию безопасности эксплуатационных ограничений на указанные критические параметры движения вертолета и формированием предупреждающей сигнализации экипажу о приближении к границам эксплуатационных режимов вертолета.
Основными задачами стартовой системы предупреждения критических режимов одновинтового вертолета являются:
1) На стоянке вертолета до запуска силовой установки и раскрутки трансмиссии:
- измерение следующих аэрометрических параметров: скорости и направления ветра относительно продольной оси вертолета; боковой и продольной составляющей вектора скорости ветра; температуры наружного воздуха и атмосферного давления на уровне стоянки или вертолетной взлетно-посадочной площадки (ВВПП), по которым определяется барометрическая высота площадки;
- измерение следующих параметров пространственной угловой ориентации: начальные (стояночные) углы крена и тангажа вертолета с учетом углов наклона ВВПП относительно плоскости горизонта, твердости грунта, просадки амортизаторов стоек шасси и давления в колесах;
- автоматическое определение допустимых сочетаний текущих значений указанных аэродинамических параметров и параметров пространственной угловой ориентации;
- выдачу предупреждающей или даже аварийной сигнализации (визуальной и звуковой) при приближении параметров стояночного режима к границам летных ограничений, указанных в РЛЭ вертолета.
2) На стоянке при запуске силовой установки и раскрутки трансмиссии обеспечивать:
- измерение текущих значений углов крена и тангажа с учетом дополнительной просадки шасси в малопрочный грунт;
- измерение скорости и направления ветра, боковой и продольной составляющих вектора скорости ветра, температуры наружного воздуха и атмосферного давления в условиях значительных искажений, вносимых воздушными потоками винта;
- определение допустимых значений углов крена и тангажа с учетом величины и направления скорости ветра;
- выработку предупреждающей и аварийной сигнальной информации при достижении характерных критических параметров летных ограничений, указанных в РЛЭ вертолета.
3) В процессе руления и маневрирования по земной поверхности обеспечивать:
- измерение боковой и продольной составляющей вектора скорости ветра;
- измерение текущей скорости руления (движения) по ВВПП;
- измерение текущих значений углов крена и тангажа;
- определение допустимых значений углов крена и тангажа в зависимости от тяги несущего винта, отклонения ручки циклического шага, скорости руления, скорости и направления ветра;
- формирование предупреждающей и аварийной сигнализации при достижении характерных критических параметров летных ограничений, установленных РЛЭ вертолета.
4) На режиме висения обеспечивать:
- измерение боковой и продольной составляющих вектора истинной воздушной скорости, определяющих величину и направление вектора скорости ветра с учетом скорости продольного и бокового смещения вертолета относительно ВВПП;
- измерение продольной и боковой скорости смещения вертолета относительно земной поверхности;
- измерение углов крена и тангажа вертолета;
- измерение угловой скорости вращения вертолета относительно вертикальной оси;
- определение допустимых значений указанных характерных критических параметров вертолета;
- Формирование предупреждающей сигнализации при достижении углов крена и тангажа в зависимости от высоты висения и угловой скорости вращения вертолета, боковой и продольной составляющих вектора скорости ветра летных ограничений, установленных РЛЭ вертолета;
- Формирование предупреждающей сигнализации о превышении темпа выбора общего шага несущего винта установленного РЛЭ ограничений.
5) На режиме снижения обеспечивать:
- Измерение углов крена и тангажа и отображение траектории снижения вертолета относительно плоскости истинного горизонта;
- Формирование предупреждающей сигнализации о превышении вертикальной скорости снижения при заходе на посадку допустимых значений, установленных РЛЭ вертолета.
Технический результат, на достижение которого направлено изобретение, заключается в повышении уровня безопасности эксплуатации и предотвращения летных происшествий одновинтовых вертолетов на стоянке, при рулении и маневрировании по земной поверхности, на взлете и на посадке, на режимах снижения и висения за счет информационной поддержки экипажа по предупреждению критических режимов, связанных с превышением летных ограничений, установленных Руководством по летной годности вертолета на скорость и направление ветра, на углы крена и тангажа на стоянке и указанных стартовых и взлетно-посадочных режимах.
Технический результат достигается тем, что в стартовой системе предупреждения критических режимов одновинтового вертолета, содержащей канал измерения, канал формирования эксплуатационных ограничений, канал индикации, канал сигнализации канал измерения включает аэрометрический канал определения величины, направления и составляющих вектора скорости ветра, спутниковый канал позиционирования и канал определения пространственного углового положения вертолета, при этом канал формирования эксплуатационных ограничений включает каналы определения допустимых значений углов крена и тангажа, скорости и направления ветра, продольной и боковой составляющих вектора скорости ветра на стоянке, на стартовых и взлетно-посадочных режимах, а каналы индикации и сигнализации включают соответственно каналы отображения текущих и допустимых значений критических параметров эксплуатационных ограничений на стартовых и взлетно-посадочных режимах.
Сущность изобретения поясняется фиг.1 - структурно-функциональная схема стартовой системы предупреждения критических режимов одновинтового вертолета,
где I - канал определения пространственного углового положения;
II - аэрометрический канал определения величины, направления и составляющих вектора скорости ветра;
III - спутниковый канал позиционирования;
IV - канал информационной поддержки экипажа;
а
1 - блок акселерометров;
2 - блок датчиков угловой скорости;
3 - блок магнитометров;
4 - блок преобразования;
5 - процессор;
6 - датчик воздушных сигналов;
7 - блок преобразования;
8 - процессор;
9 - приемник спутниковой навигационной системы (СНС);
10 - канал индикации текущих и допустимых значений критических параметров;
11 - канал формирования эксплуатационных ограничений;
12 - канал сигнализации;
Канал I определения пространственного углового положения включает блок 1 акселерометров, блок 2 датчиков угловой скорости и блок 3 магнитометров, которые измеряют составляющие a
x, a
y, a
z вектора 


Аэрометрический канал II определения величины, направления и составляющих вектора скорости ветра включает датчик воздушных сигналов 6, выходные сигналы которого поступают в блок 7 преобразования и далее в процессор 8, на выходе которого формируются выходные сигналы по величине W и углу ψ направления ветра, продольной Wx и боковой Wz составляющих вектора скорости 
Для повышения точности и расширения нижней границы измерения параметров вектора скорости ветра датчик воздушных сигналов 6 аэрометрического канала может быть выполнен на основе неподвижного комбинированного аэрометрического приемника (например, см. патент РФ №2427844, G01P 5/14, опубл. 27.08.2011).
Спутниковый канал III позиционирования включает приемник 9 СНС, регистрирующий местоположение 


Выходные сигналы канала определения пространственного углового положения, аэрометрического и спутникового каналов измерения подаются в канал IV информационной поддержки экипажа, который включает канал 10 индикации текущих и допустимых значений критических параметров, канал 11 формирования эксплуатационных ограничений и канал 12 сигнализации.
Стартовая система работает следующим образом.
Выходные сигналы канала IV информационной поддержки экипажа через средства индикации, световой и звуковой сигнализации предупреждают экипаж о приближении к границам эксплуатационных режимов полета вертолета на стоянке, стартовых и взлетно-посадочных режимах, установленных Руководством по летной эксплуатации вертолета.
В частности. Руководство по летной эксплуатации вертолета класса Ми-8 накладывает следующие ограничения на параметры стоянки, стартовых и взлетно-посадочных режимов:
1) На стоянке угол наклона вертолетной взлетно-посадочной площадки в направлении взлета и посадки не должен превышать допустимого значения ϑ0 доп=5 угл. град., угол наклона в поперечном направлении - значения γ0 доп=3 угл. град.
Боковая составляющая Wz вектора скорости ветра, действующая под углом 90 угл. град. к продольной оси вертолета, не должна превышать допустимого значения 

В процессе запуска силовой установки и раскрутки трансмиссии углы крена γ и тангажа ϑ вертолета также не должны превышать значений γ0 доп и ϑ0 доп, установленных РЛЭ вертолета.
2) При рулении и маневрировании вертолета по земной поверхности углы крена γ и тангажа ϑ не должны превышать предельно-допустимых значений γПР и ϑПР, которые зависят от скорости руления Vp, углов γ0, ϑ0 наклона ВВПП, величины W и угла ψ направления вектора скорости ветра, тяги PНВ и PРВ несущего и рулевого винтов, положения xЦШ ручки циклического шага, т.е.

В процессе руления и маневрирования вертолета по земной поверхности боковая Wz и продольная Wx составляющие вектора скорости ветра не должны превышать стояночных ограничений, установленных РЛЭ, т.е.

3) При взлете и посадке вертолета ограничения вида (1) и (2) дополняются ограничениями на допустимую взлетную массу mдоп, зависящую от величины W и направления ψ вектора скорости ветра (или от Wx и Wz) и способа взлета (посадки) - по вертолетному (без разбега) или по самолетному (с разбегом).
4) На режиме снижения вертикальная скорость снижения Vy сн вертолета не должна превышать допустимого значения Vy сн доп, которое зависит от относительной высоты полета HОТ, т.е.

5) На режиме висения текущие значения угла крена γ(t) и угла тангажа ϑ(t) вертолета не должны превышать допустимых летных ограничений по крену γл огр и тангажу ϑл огр, которые зависят от высоты висения H и угловой скорости ωy вращения вертолета относительно вертикальной оси, т.е.

При работе стартовой системы предупреждения критических режимов одновинтового вертолета канал I пространственной угловой ориентации, аэрометрический канал II определения величины, направления и составляющих вектора скорости ветра и спутниковый канал III позиционирования измеряют текущие значения характерных критических параметров вертолета на стоянке, при рулении, и маневрировании по земной поверхности, на взлете и при посадке, на режимах снижения и висения.
При этом канал I с помощью блоков акселерометров 1, блока датчиков угловой скорости 2 и блока магнитометров 3 измеряет составляющие a
x, a
y, a
z, вектора 


Датчик 6 воздушных сигналов аэрометрического канала II воспринимает параметры вектора скорости 



Спутниковый канал III позиционирования с помощью приемника 9 СНС определяет скорость руления Vр и скорости VCX, VCY продольного и бокового смещения вертолета относительно вертолетной взлетно-посадочной полосы, которые также подаются в аэрометрический канал.
Выходные сигналы каналов пространственного углового положения, аэрометрического и спутникового каналов измерения подаются в канал IV информационной поддержки экипажа, где в канале индикации отображаются текущие и допустимые значения характерных критических параметров на старте, стартовых и взлетно-посадочных режимах. При этом допустимые значения критических параметров вычисляются в канале 11 формирования эксплуатационных ограничений и также подаются в канал 10 индикации и в канал 12 сигнализации. По каналам 10 и 12 (индикации и сигнализации) экипажу выдается визуальная, световая и звуковая предупреждающая информация о приближении к границам эксплуатационных режимов, установленных Руководством по летной эксплуатации вертолета.
В соответствии с поступившей информацией экипаж принимает решение по управлению вертолета на данном режиме для уменьшения значения параметра движения, приближающегося к эксплуатационным ограничениям, установленным Руководством по летной эксплуатации вертолета, предотвращая возникновение авиационного происшествия и обеспечивая регламентируемый уровень безопасности на текущем режиме.
На стоянке до запуска силовой установки и раскрутки трансмиссии многоканальный проточный аэрометрический приемник 13 воспринимает параметры вектора скорости 


Давления PПΣ, PСТΣ, P1Σ и P2Σ, P3Σ и P4Σ преобразуются в блоке 7 преобразования (Фиг.1) в цифровые сигналы, которые поступают на вход процессора 8.
В процессоре в соответствии с алгоритмами, раскрытыми в патенте РФ №2427844, G01P 5/14, опубл. 27.08.2011, вычисляются продольная Wx и боковая Wz составляющие вектора скорости 
Предложенная стартовая система предупреждения критических режимов одновинтового вертолета повышает уровень безопасности при его эксплуатации на стоянке, при рулении и маневрировании по земной поверхности, на взлете и на посадке, на режимах снижения и висения за счет информационной поддержки экипажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА | 2010 |
|
RU2439584C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА НА КОРАБЛЬ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2673314C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ВЕРТОЛЕТА | 2013 |
|
RU2543111C1 |
Изобретение относится к области авиации, в частности к устройствам обеспечения безопасности и предупреждения летных происшествий одновинтовых вертолетов на стартовых и взлетно-посадочных режимах. Система состоит из каналов: измерения; формирования эксплуатационных ограничений; индикации; сигнализации. Канал измерения включает аэрометрический канал определения величины, направления и составляющих вектора скорости ветра, спутниковый канал позиционирования и канал определения пространственного углового положения вертолета. Канал формирования эксплуатационных ограничений включает каналы определения допустимых значений углов крена и тангажа, скорости и направления ветра, продольной и боковой составляющих вектора скорости ветра на стоянке, на стартовых и взлетно-посадочных режимах, а каналы индикации и сигнализации включают соответственно каналы отображения текущих и допустимых значений критических параметров эксплуатационных ограничений на стартовых и взлетно-посадочных режимах. Повышается уровень безопасности на стоянке, при рулении и маневрировании по земной поверхности, на взлете и на посадке, на режимах снижения и висения. 1 ил.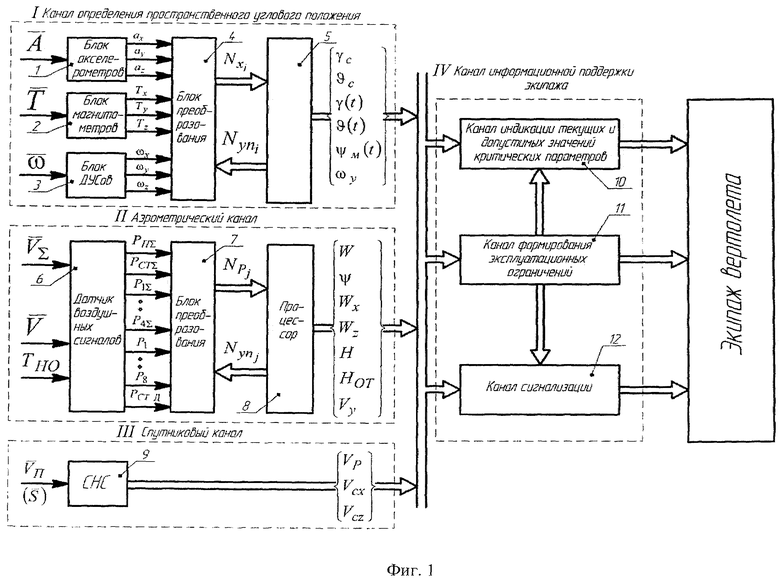
Стартовая система предупреждения критических режимов одновинтового вертолета, содержащая канал измерения, канал формирования эксплуатационных ограничений, канал индикации, канал сигнализации, отличающаяся тем, что канал измерения включает аэрометрический канал определения величины, направления и составляющих вектора скорости ветра, спутниковый канал позиционирования и канал определения пространственного углового положения вертолета, при этом канал формирования эксплуатационных ограничений включает каналы определения допустимых значений углов крена и тангажа, скорости и направления ветра, продольной и боковой составляющих вектора скорости ветра на стоянке, на стартовых и взлетно-посадочных режимах, а каналы индикации и сигнализации включают соответственно каналы отображения текущих и допустимых значений критических параметров эксплуатационных ограничений на стартовых и взлетно-посадочных режимах.
| АЭРОМЕХАНИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ВЕРТОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352914C1 |
| US 6917860 B1, 12.07.2005 | |||
| US 6650972 B1, 18.11.2003 | |||
| US 6608568 B1, 19.08.2003 | |||
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |

