Область техники, к которой относится изобретение
Настоящее изобретение относится к рабочему транспортному средству, а, более конкретно, к системе управления передвижением рабочего транспортного средства, которая обеспечивает переключаемое управление передвижением.
Уровень техники
Рабочие транспортные средства используют в строительной, сельскохозяйственной и лесотехнической промышленности для осуществления различных рабочих функций. Экскаваторы, например, выполнены с возможностью перемещения почвы, песка, гравия, камней или другого подходящего материала на рабочей площадке. Экскаваторы требуют определенных навыков, концентрации и выносливости для работы с помощью комбинации джойстиков, рычагов, педалей и тому подобное. Иногда операторы могут пытаться управлять экскаватором более удобным или комфортабельным образом, но он может быть не идеальным для экскаватора.
Сущность изобретения
В настоящем изобретении предложены система и способ управления передвижением рабочего транспортного средства.
В одном аспекте в изобретении предложена система управления передвижением для рабочего транспортного средства с гусеничным узлом. Система управления передвижением содержит ходовой двигатель, выполненный с возможностью приведения в действие в направлении переднего хода для приведения в движение гусеничного узла в направлении переднего хода и в направлении заднего хода для приведения в движение гусеничного узла в направлении заднего хода; по меньшей мере одно устройство управления передвижением, выполненное с возможностью приведения в действие оператором в первом вводимом направлении и втором вводимом направлении; и механизм переключения передвижения, соединенный с ходовым двигателем и по меньшей мере одним устройством управления передвижением. Механизм переключения передвижения выполнен с возможностью работы в первом режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении переднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении заднего хода. Гидравлический контур выполнен с возможностью работы во втором режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении заднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении переднего хода.
В другом аспекте в изобретении предложено рабочее транспортное средство, которое содержит раму; кабину, установленную на раме; устройство управления передвижением, расположенное внутри кабины и выполненное с возможностью приведения в действие оператором в первом вводимом направлении и втором вводимом направлении; грунтозацепный механизм, установленный на раме; ходовой двигатель, соединенный с рамой и грунтозацепным механизмом, причем ходовой двигатель выполнен с возможностью выборочного приведения в движение грунтозацепного механизма на основании команд от устройства управления передвижением в направлении переднего хода и в направлении заднего хода; и механизм переключения передвижения, соединенный с ходовым двигателем и по меньшей мере одним устройством управления передвижением. Механизм переключения передвижения выполнен с возможностью работы в первом режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении переднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении заднего хода. Механизм переключения передвижения выполнен с возможностью работы во втором режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении заднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении переднего хода.
Подробности одного или более вариантов осуществления изложены на сопровождающих чертежах и в описании ниже. Другие признаки и преимущества станут понятны из описания, фигур и формулы изобретения.
Краткое описание чертежей
На фиг. 1 представлен вид сбоку рабочего транспортного средства в виде иллюстративного экскаватора, имеющего систему управления передвижением согласно иллюстративным вариантам осуществления настоящего изобретения;
на фиг. 2 представлен упрощенный изометрический вид кабины оператора экскаватора фиг. 1 согласно иллюстративным вариантам осуществления настоящего изобретения;
на фиг. 3A и 3B представлен вид сбоку гусеничного узла экскаватора фиг. 1 согласно иллюстративным вариантам осуществления настоящего изобретения; а
на фиг. 4 представлен гидравлический контур и функциональная блок-схема, иллюстрирующая систему управления передвижением экскаватора фиг. 1 согласно иллюстративным вариантам осуществления настоящего изобретения.
Одинаковые ссылочные номера на разных чертежах обозначают одинаковые элементы.
Подробное описание изобретения
Далее описаны один или более иллюстративных вариантов осуществления раскрытой системы управления передвижением, которые показаны на сопровождающих фигурах чертежей, кратко описанных выше. Специалист в данной области техники может предусмотреть различные модификации иллюстративных вариантов осуществления.
В рамках настоящего изобретения, если не ограничено или модифицировано иное, списки с элементами, которые разделены соединительными союзами (например, «и») и которым также предшествует фраза «один или более из» или «по меньшей мере один из» обозначают конфигурации или компоновки, которые потенциально содержат отдельные элементы списка или любую их комбинацию. Например, «по меньшей мере один из A, B и C» или «один или более из A, B и C» указывает на возможность только A, только B, только C или любой комбинации из двух или более из A, B и C (например, А и B; B и C; А и C; или A, B и C).
Кроме того, в подробном изложении изобретения могут быть использованы такие термины направления, как «вперед», «назад», «задний», «боковой», «горизонтальный» и «вертикальный». Определение таких терминов по меньшей мере частично дано относительно направления, в котором во время использования двигается рабочее транспортное средство. Например, термин «вперед» и его сокращенный вариант (и любые производные и варианты) относятся к направлению, соответствующему основному направлению движения рабочего транспортного средства (конкретно относительно ходовой части или основания транспортного средства), тогда как термины «назад» и «обратно» (и производные и варианты) относятся к противоположному направлению. Термин «продольная ось» также может означать ось, проходящую в направлениях вперед и назад. Для сравнения, термин «боковая ось» может относиться к оси, которая перпендикулярна продольной оси и проходит в горизонтальной плоскости; то есть в плоскости, содержащей как продольную, так и боковые оси. Термин «вертикальный» в рамках настоящего изобретения относится к оси или направлению, перпендикулярному горизонтальной плоскости, содержащей продольную и боковую оси.
Далее описаны один или более иллюстративных вариантов исполнения раскрытой системы и способа управления передвижением рабочего транспортного средства. Раскрытая система управления, способ работы и связанное с ними рабочее транспортное средство обеспечивают улучшенные характеристики, более комфортную работу и пониженный износ транспортного средства по сравнению с обычными системами.
Рабочее транспортное средство, такое как экскаватор, может иметь гусеничные узлы и орудия, управляемые с помощью набора устройств управления оператора. Например, оператор может толкать одно или более устройств управления оператора (например, рычаги или педали) для передвижения транспортного средства в направлении вперед и тянуть устройства управления оператора для передвижения транспортного средства в направлении назад. На относительно больших расстояниях передвижения толкание устройств управления оператора может стать утомительным для оператора настолько, что у оператора может возникнуть соблазн поворота и разворота ходовой части относительно кабины оператора (например, так чтобы оператор был обращен назад относительно транспортного средства, в сторону места назначения), чтобы тянуть устройства управления оператора, и вести транспортное средство в «направлении назад» к месту назначения. Однако работа в обратном направлении может приводить к большему износу гусеничных узлов по сравнению с работой в направлении вперед, что приводит к чрезмерному износу, когда для повышения комфорта оператор пытается работать таким образом. В вариантах осуществления, обсуждаемых в данном документе, представлены переключаемые устройства управления оператора для системы управления передвижением, в которой оператор может выбирать режим направления передвижения, включая режим, в котором оператор тянет устройства управления оператора для движения вперед, что приводит к более комфортабельной работе с меньшим износом экскаватора.
В качестве примера, система управления передвижением может содержать гидравлический контур, который управляет прохождением давления жидкости между насосом и ходовыми двигателями, которые приводят в движение грунтозацепные механизмы в направлениях переднего и заднего хода на основании входных данных на устройствах управления оператора. Как описано ниже, устройства управления передвижением могут включать в себя клапаны переключения направления, которые выполнены с возможностью переключения давления жидкости сигнальных трубопроводов на основании режима направления передвижения таким образом, чтобы перераспределить заданные входные данные оператора, которые приводят к направлениям переднего и заднего хода в первом режиме направления передвижения, и которые во втором режиме направления передвижения приводят к направлениям заднего и переднего хода, соответственно. В некоторых примерах для реализации первого и второго режимов направления передвижения в системе управления передвижением можно использовать электрические переключатели и/или двигатель. В частности, контроллер может сопоставлять устройства ввода оператора с направлениями движения двигателей на основании выбранного режима.
Далее со ссылкой на чертежи будет описан один или более иллюстративных вариантов исполнения настоящего изобретения. Несмотря на то, что в данном документе в качестве иллюстративного рабочего транспортного средства показан и описан экскаватор, специалисту в данной области должно быть понятно, что раскрытые в данном документе принципы системы управления и способы можно легко адаптировать для использования в других типах рабочих транспортных средств, включая погрузчик, бульдозер, самоходный грейдер или другой тип строительного, сельскохозяйственного, лесотехнического транспортного средства или транспортного средства общего назначения. Аналогичным образом, транспортное средство, описанное в данном документе, представляет собой гусеничное транспортное средство, хотя изобретение можно реализовать с колесным транспортным средством. В связи с этим настоящее изобретение не следует ограничивать вариантами исполнения, связанными с экскаваторами или конкретным показанным и описанным иллюстративным экскаватором.
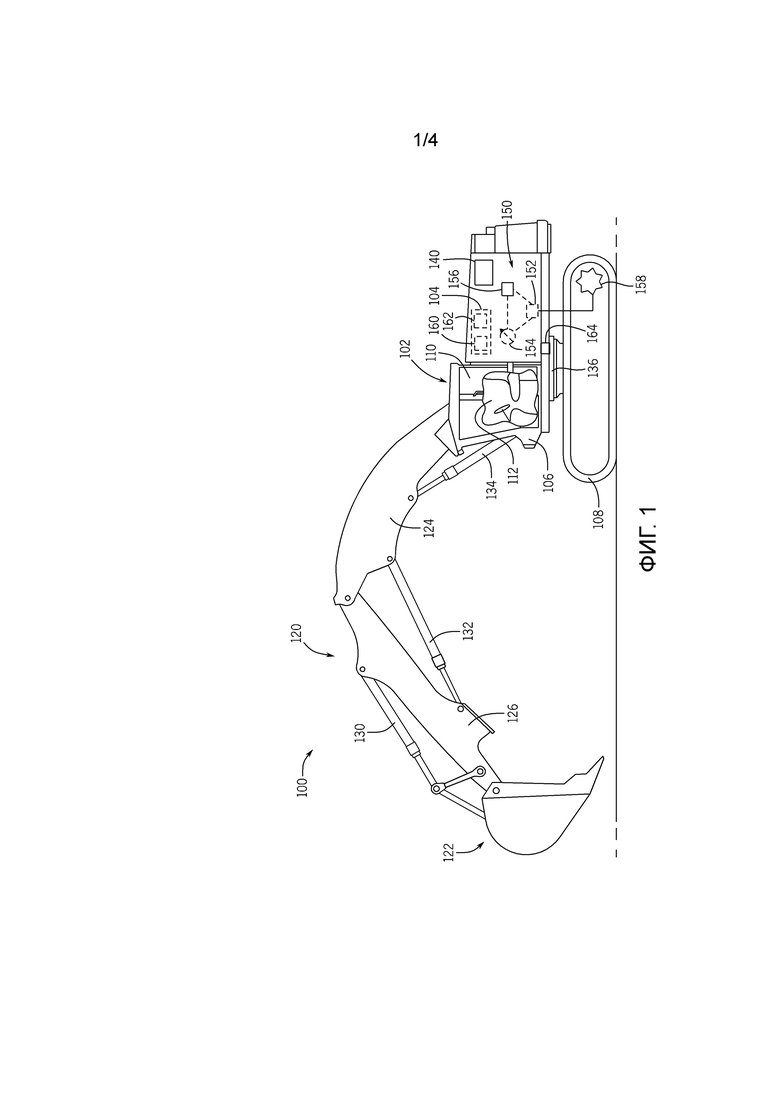
На фиг. 1 представлена система 100 управления передвижением, реализованная в рабочем транспортном средстве 102 в виде иллюстративного экскаватора. Обычно, оператор управляет экскаватором 102 и системой 100 управления передвижением для выполнения множества функций, например, для перемещения и/или манипулирования почвой или другими материалами на рабочей площадке или между рабочими площадками. Как описано более подробно ниже, система 100 управления передвижением может содержать контроллер 104 для осуществления и/или облегчения различных функций экскаватора, обсуждаемых в данном документе. Хотя ниже обсуждаются некоторые элементы экскаватора, экскаватор 102 может содержать любое количество дополнительных или альтернативных систем, подсистем и элементов.
Обычно экскаватор 102 может содержать шасси или раму 106, опирающуюся на один или более гусеничных узлов 108 или другие грунтозацепные механизмы для передвижения экскаватора 102, как обсуждается более подробно ниже. Обычно гусеничный узел 108 представлен на обеих сторонах экскаватора 102.
Экскаватор 102 также может содержать кабину 110, образующую помещение для оператора, которая расположена на раме 106. Кабина 110 обеспечивает огороженное место для сиденья оператора и пульта оператора для установки различных устройства 112 управления оператора (например, джойстика (джойстиков), рулевого колеса, педалей газа и тормоза, дисков, кнопок и т.д.), а также таких элементов, как оборудование связи, интерфейсы оператора, обеспечивающие графические (или другие) органы управления вводом и обратной связи и другие инструменты, используемые при работе экскаватора 102. Конкретные примеры устройств 112 управления оператора обсуждаются более подробно ниже.
Экскаватор 102 может дополнительно содержать соединительный рычаг 120, прикрепленный одним концом к раме 106, а на противоположном конце поддерживающий орудие 122, которым в этом варианте осуществления является ковш, хотя могут быть представлены другие орудия. Рычаг 120 может быть образован стрелой 124, проходящей от рамы 106, и рукоятью 126, проходящей от конца стрелы 124 и поддерживающей ковш 122. Экскаватор 102 может дополнительно содержать множество иллюстративных исполнительных механизмов 130, 132, 134, 136, управляемых на основании команд от контроллера 104 и/или оператора посредством устройств 112 управления оператора, включая исполнительные механизмы 130, связанные с поворотом ковша 122 относительно рукояти 126, исполнительные механизмы 132, поворачивающие рукоять 126 относительно стрелы 124, исполнительные механизмы 134 для поворота стрелы 124 относительно рамы 106, и исполнительные механизмы 136 для поворота рамы 106 относительно рамы 106. Исполнительные механизмы 130, 132, 134, 136 могут включать в себя электрический двигатель, пневматический исполнительный механизм или другой тип исполнительного механизма, включая линейные, вращательные и/или гидравлические исполнительные механизмы. Дополнительные исполнительные механизмы обсуждаются ниже.
Экскаватор 102 может дополнительно содержать двигатель 140 или другой источник энергии для предоставления механической или электрической энергии разным системам, подсистемам и элементам экскаватора 102 на основании команд от контроллера 104 и/или оператора посредством устройств 112 управления оператора. В качестве примеров, двигатель 140 можно использовать для питания иллюстративных исполнительных механизмов 130, 132, 134, 136, описанных выше.
Как указано выше, экскаватор 102 содержит систему 100 управления передвижением, по меньшей мере частично реализованную в виде контроллера 104, который обеспечивает приведение в движение гусеничных узлов 108 для передвижения экскаватора 102 в направлениях вперед и назад. В одном варианте осуществления система 100 управления передвижением содержит гидравлический контур 150 или другой тип механизма переключения передвижения. Как показано, гидравлический контур 150 может включать в себя по меньшей мере одно клапанное устройство 152, насос 154, возвратный бак 156 и ходовой двигатель 158. В одном примере предоставлено два ходовых двигателя 158, по одному для каждого гусеничного узла 108. В некоторых вариантах осуществления можно считать, что система 100 управления передвижением содержит одно или более устройств 112 управления оператора для приема команд оператора и/или двигатель 140 для питания насоса 154 и/или других элементов. Хотя ниже обсуждается один тип гидравлического контура 150, для совместного приведения в движение гусеничных узлов 108 могут быть представлены другие механизмы. Кроме того, хотя система 100 управления передвижением описана ниже с ходовыми двигателями 158 в качестве гидравлических двигателей внутри гидравлического контура 150, можно использовать другие типы двигателей или исполнительных механизмов и/или другие типы механизмов переключения передвижения, включая электрические ходовые двигатели. Кроме того, гидравлический контур 150 может быть частично реализован или заменен электрическими механизмами переключения, как описано ниже.
Как описано более подробно ниже, на основании ввода оператора посредством устройств 112 управления оператора приводят в действие клапанное устройство 152 для направления и распределения соответствующим образом гидравлической жидкости через гидравлический контур 150 между насосом 154 и баком 156 для приведения в действие ходовых двигателей 158. Хотя на фиг. 1 не показано подробно, ходовые двигатели 158 приводят в движение гусеничные узлы 108 (например, посредством бортовых передач, зубчатых передач и тому подобное) для передвижения экскаватора 102. Обычно, гусеничные узлы 108 можно приводить в движение совместно для передвижения экскаватора 102 в направлениях вперед и назад обычно по прямой линии или приводить в движение отдельно для управления или поворота экскаватора 102. Дополнительные подробности, относящиеся к работе системы 100 управления передвижением, предоставлены ниже.
Как отмечалось выше, система 100 управления передвижением может быть по меньшей мере частично реализована в виде контроллера 104, который обеспечивает работу экскаватора 102 по меньшей мере в двух режимах направления передвижения в зависимости от выбора оператора. В первом или основном режиме направления передвижения контроллер 104 подает в гидравлический контур 150 команды таким образом, что толкание устройств 112 управления оператора приводит в движение экскаватор 102 в направлении вперед, а тяга устройств 112 управления оператора приводит в движение экскаватор 102 в направлении назад; а во втором или дополнительном режиме направления передвижения контроллер 104 подает в гидравлический контур 150 команды таким образом, что тяга устройств 112 управления оператора приводит в движение экскаватор 102 в направлении вперед, а толкание устройств 112 управления оператора приводит в движение экскаватор 102 в направлении назад.
Обычно, контроллер 104 может быть встроенным, дистанционным или представлять собой их комбинацию в виде выделенного контроллера для системы управления передвижением или общего контроллера для управления всей работой экскаватора 102. Контроллер 104 может включать в себя любой подходящий тип процессора 160 и запоминающего устройства 162, содержащего команды, выполняемые процессором 160 для осуществления различных функций, описанных в данном документе. Контроллер 104 может быть выполнен в виде аппаратной вычислительной схемы (или схем), программируемой схемы, гидравлического контроллера, электрического контроллера, электро-гидравлического контроллера или иным образом. В связи с этим контроллер 104 может быть выполнен с возможностью исполнения различных вычислительных и управляющих функций относительно экскаватора 102. В некоторых вариантах осуществления контроллер 104 может быть выполнен с возможностью приема входных сигналов в разных форматах (например, в виде гидравлических сигналов, сигналов напряжения, токовых сигналов и так далее) и подачи командных сигналов в разных форматах (например, в виде гидравлических сигналов, сигналов напряжения, токовых сигналов, механических движений и так далее). В некоторых вариантах осуществления контроллер 104 (или его часть) может быть сконфигурирован в виде узла гидравлических компонентов (например, клапанов, трубопроводов, баков и так далее) таким образом, что управление различными устройствами (например, насосами или двигателями) можно осуществлять с помощью и на основании гидравлических, механических или других сигналов и движений.
Для облегчения работы экскаватор 102 может дополнительно содержать ряд датчиков. Например, датчики могут быть связаны с исполнительными механизмами 130, 132, 134, 136, обсуждаемыми в данном документе. В одном примере на раме 106 и/или в кабине 110 может быть представлен датчик 164 положения, который указывает положение кабины 110 (и оператора) относительно рамы 106. Кроме того, датчики могут быть связаны с устройствами 112 управления оператора для определения соответствующих положений устройств 112 управления оператора для отображения вводимых оператором данных для приема и реализации контроллером 104.
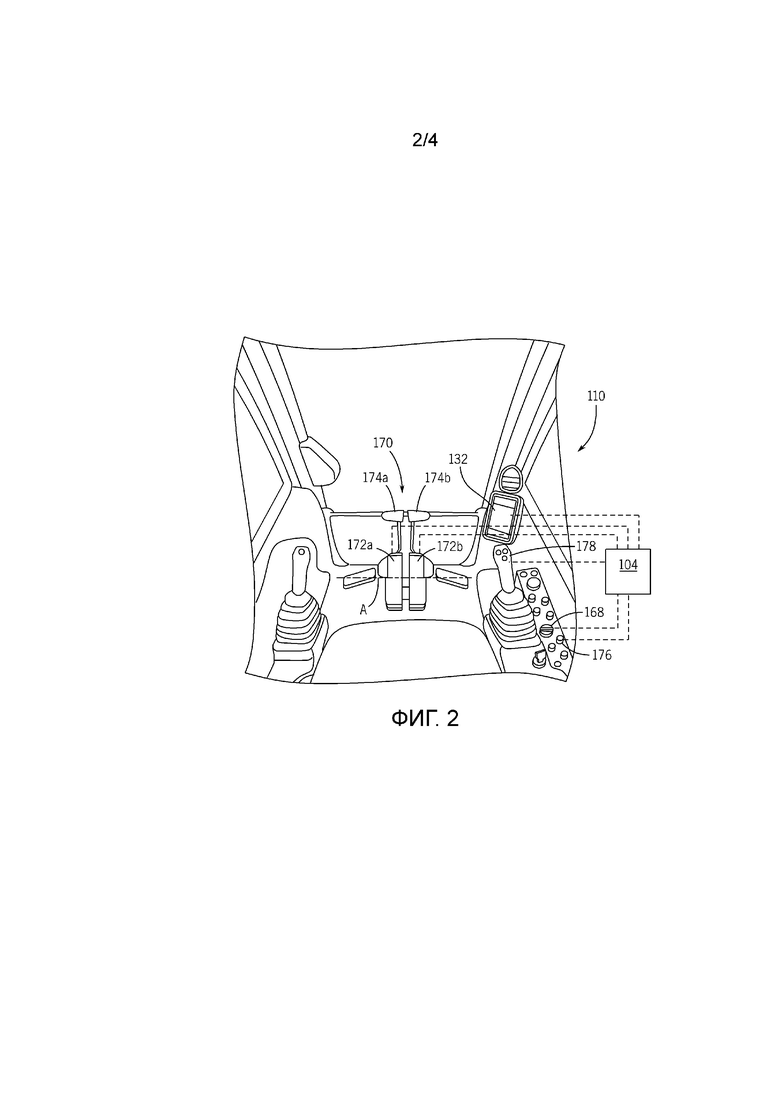
На фиг. 2 изображен иллюстративный вид кабины 110 оператора, конкретно ряд устройств 112 управления оператора, которые обеспечивают работу с системами экскаватора 102 посредством контроллера 104. В качестве примеров, устройства 112 управления оператора включают в себя переключатель 168 выбора режима направления передвижения и набор устройств 170 управления передвижением, а также устройство 176 ввода скорости, устройство 178 ввода орудия и ряд дополнительных устройств, которые в качестве примеров могут быть в виде кнопок, переключателей или дисков.
Переключатель 168 выбора режима направления передвижения может принимать любую подходящую форму. Переключатель 168 выбора режима направления передвижения позволяет оператору выбирать режим направления передвижения, в том числе первый режим направления передвижения или второй режим направления передвижения, который определяет взаимодействие между устройствами 170 управления передвижением и ходовыми двигателями 158, как описано более подробно ниже.
Устройства 170 управления передвижением, которые связаны с системой 100 управления передвижением, включают в себя левую (ножную) педаль 172a и левый (ручной) рычаг 174a, связанные с левым гусеничным узлом 108, и правую (ножную) педаль 172b и правый (ручной) рычаг 174b, связанные с правым гусеничным узлом 108. Обычно левая педаль 172a и левый рычаг 174a выполняют одинаковую функцию и/или могут быть скреплены для совместного движения, и аналогичным образом, правая педаль 172b и правый рычаг 174b выполняют одинаковую функцию и/или могут быть скреплены для совместного движения. Каждая педаль 172a, 172b может быть выполнена с возможностью поворота вокруг горизонтальной оси, например, за счет надавливания на переднюю часть соответствующей педали 172a, 172b носком стопы или за счет надавливания на заднюю часть соответствующей педали 172a, 172b пяткой. В некоторых примерах педали 172a, 172b могут быть «V-образными» для облегчения этого движения вперед и назад. Аналогичным образом, каждый рычаг 174a, 174b можно поворачивать от соответствующего основания во вводимых направлениях вперед и назад. В связи с этим педали 172a, 172b и рычаги 174a, 174b можно «толкать» (направляя от оператора) или «тянуть» (направляя к оператору).
Соответственно, педали 172a, 172b и рычаги 174a, 174b представляют собой устройства 170 управления передвижением для управления направлением движения экскаватора 102. Как отмечалось выше, левая педаль 172a и левый рычаг 174a связаны с приведением в действие левого гусеничного узла 108, а правая педаль 172b и правый рычаг 174b связаны с приведением в действие правого гусеничного узла 108. В связи с этим, когда левую педаль 172a (и/или рычаг 174a) и правую педаль 172b (и/или рычаг 174b) перемещают в одинаковом вводимом направлении, экскаватор 102 двигается по прямой линии, поскольку и левый и правый гусеничные узлы 108 приходят в движение в одинаковом направлении. Когда левую педаль 172a (и/или рычаг 174a) и правую педаль 172b (и/или рычаг 174b) перемещают в разных вводимых направлениях или перемещают только одну сторону, экскаватор 102 поворачивает, поскольку и левый и правый гусеничные узлы 108 приходят в движение в разных направлениях или в движение приходит только отдельный гусеничный узел 108.
Как отмечалось выше, в первом режиме направления передвижения перемещение педалей 172a, 172b и рычагов 174a, 174b во вводимом направлении вперед (например, «толкание») действует, вызывая движение гусеничных узлов 108 в направлении переднего хода, а перемещение педалей 172a, 172b и рычагов 174a, 174b во вводимом направлении назад (например, «тяга») действует, вызывая движение гусеничных узлов 108 в направлении заднего хода. При переходе во второй режим направления передвижения перемещение педалей 172a, 172b и рычагов 174a, 174b во вводимом направлении вперед действует, вызывая движение гусеничных узлов 108 в направлении заднего хода, а перемещение педалей 172a, 172b и рычагов 174a, 174b во вводимом направлении назад действует, вызывая движение гусеничных узлов 108 в направлении переднего хода. Другими словами, режим направления передвижения определяет направление движения экскаватора с учетом соответствующего положения ввода устройств 170 управления передвижением.
В некоторых случаях толкание устройств 170 управления передвижением от оператора может становиться утомительным или приводить к усталости оператора. В обычных экскаваторах это может приводить к перемещению оператора между местоположениями рабочего места в направлении заднего хода (например, путем поворота кабины в противоположном направлении относительно рамы 106 и тяги устройств 170 управления передвижением назад). Однако работа экскаватора в направлении заднего хода может приводить к чрезмерному износу гусеничных узлов 108. Соответственно, в этой ситуации оператор может переходить во второй режим направления передвижения таким образом, чтобы тяга устройств 170 управления передвижением приводила к передвижению экскаватора 102 в направлении переднего хода таким образом, который является более удобным для оператора и приводит к меньшему износу экскаватора 102.
Как указано выше, дополнительные устройства 112 управления оператора в кабине 110 могут включать в себя реализацию одного или более устройств 178 ввода, которые управляют одним или несколькими исполнительными механизмами 130, 132, 134, 136. Как дополнительно показано на фиг. 2, экскаватор 102 содержит устройство 180 отображения, такое как монитор, которое функционально соединено с контроллером 104 для предоставления оператору визуальной обратной связи. В одном варианте осуществления устройство 180 отображения представлено в виде простого планшета с плоским экраном в кабине 110 оператора. В других вариантах осуществления устройство 180 отображения представляет собой проецируемое отображение, где изображения проецируются или отображаются иным образом, например, на окнах кабины 110 оператора. Могут быть представлены другие подходящие устройства 180 отображения. Обычно устройство 180 отображения внутри кабины 110 оператора может отображать или иным образом передавать оператору выбранный режим направления передвижения и другую информацию о передвижении или направлении.
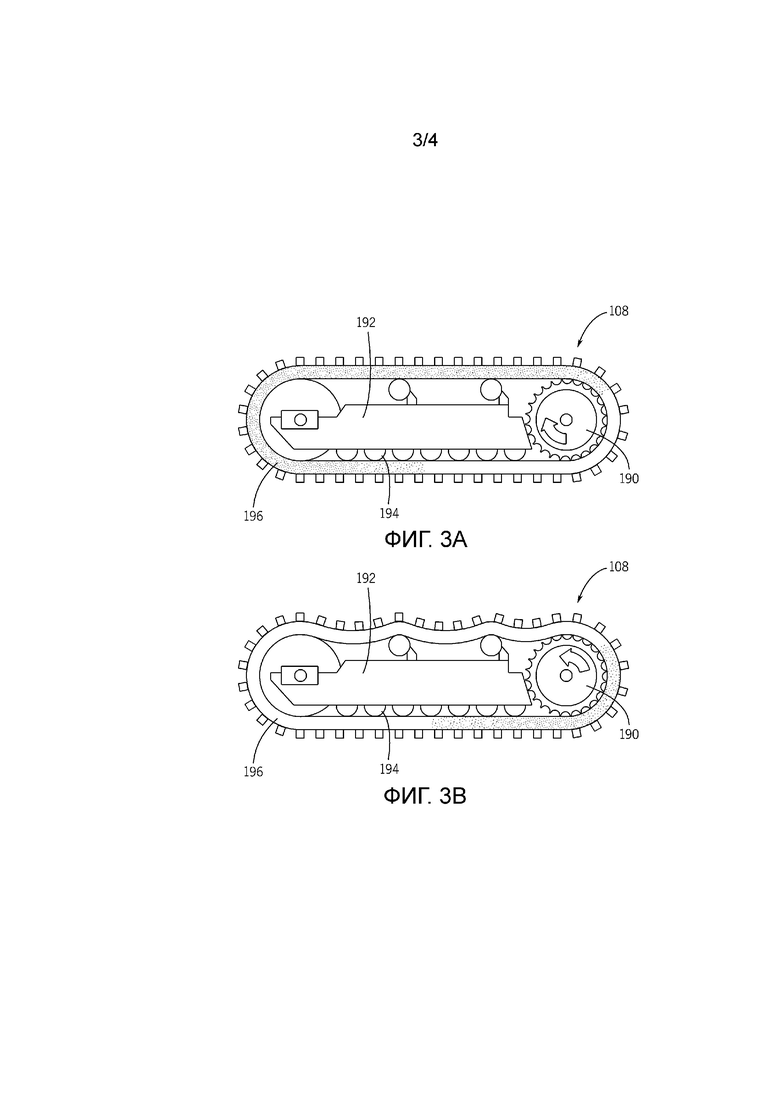
Далее сделана ссылка на фиг. 3A и 3B, на которых показан вид сбоку изображений левого гусеничного узла 108. Вид фиг. 3A представлена работа гусеничного узла 108, движущегося в направлении заднего хода, а на фиг. 3B представлена работа гусеничного узла 108, движущегося в направлении переднего хода.
Обычно гусеничный узел 108 содержит ведущее колесо 190, поддерживаемое ходовой частью 192, которая дополнительно содержит любое количество направляющих или натяжных колес 194. для сцепления с землей вокруг колес 190, 194 проходит гусеница 196, образованная из ряда звеньев и пальцев. Ведущее колесо 190 приходит в движение от ходового двигателя 158 в каждом направлении, чтобы, в свою очередь, приводить в движение гусеницу 196 в соответствующем направлении движения, с передвижением за счет этого экскаватора 102 в направлениях переднего и заднего хода. В этом примере ведущее колесо 190 расположено внутри гусеничного узла 108 таким образом, что движущая сила для гусеницы 196 для передвижения экскаватора 102 передается со стороны задней части. На фиг. 1, 3A и 3B эта конфигурация будет приводить к тому, что соответствующий гидравлический двигатель 158 будет приводить в движение ведущее колесо 190 гусеничного узла 108 в направлении против часовой стрелки при перемещении в направлении переднего хода и в направлении по часовой стрелке при перемещении в направлении заднего хода. На фиг. 3A и 3B выделены зоны повышенного напряжения на гусенице 196 для направлений заднего и переднего хода, соответственно. Как можно понять из изображения фиг. 3A, работа в направлении заднего хода приводит к тому, что ведущее колесо 190 тянет основную часть гусеницы 196 (например, верхнюю и заднюю стороны), что приводит к повышенному износу, обусловленному контактом, нагрузкой и движением ведущего колеса 190, пальцев и звеньев гусеницы 196 и ходовой части 192. Как можно понять из изображения фиг. 3B, работа в направлении переднего хода приводит к тому, что ведущее колесо 190 тянет меньшую часть гусеницы 196 (например, главным образом переднюю часть), что приводит к относительно меньшему износу, обусловленному контактом, нагрузкой и движением ведущего колеса 190, пальцев и звеньев гусеницы 196 и ходовой части 192. Соответственно, с точки зрения долговечности полезно обычно двигаться в направлении переднего хода.
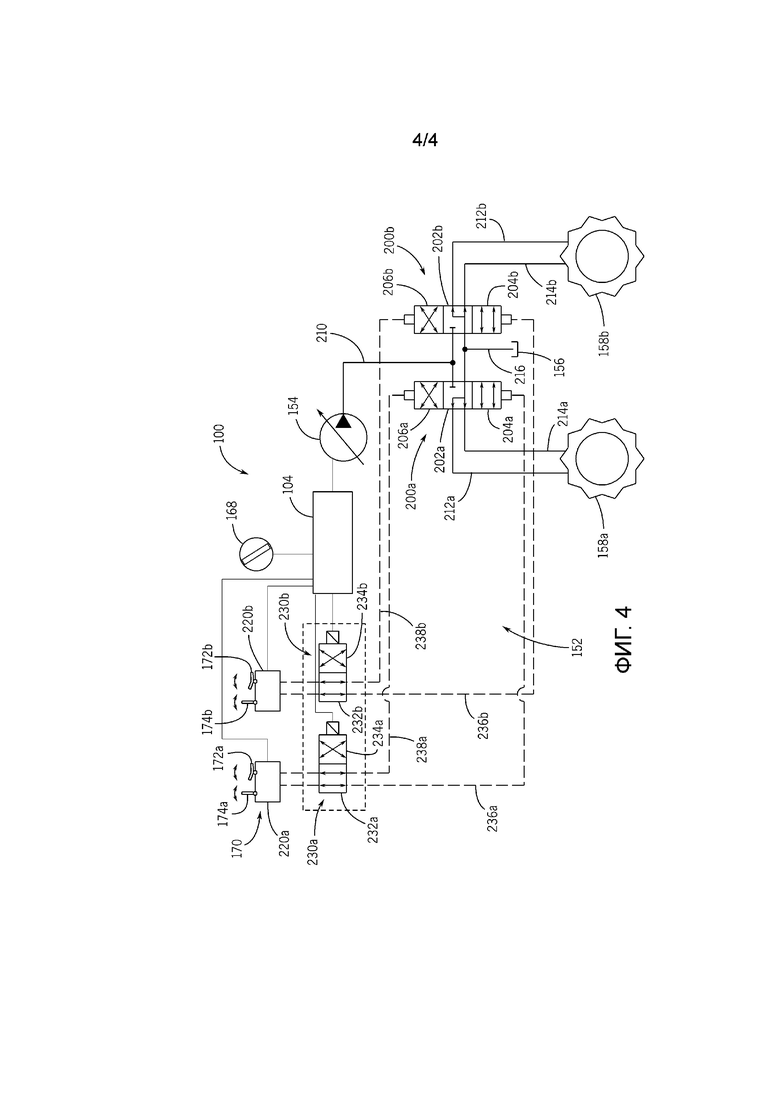
Далее сделана ссылка на фиг. 4, на которой схематично представлен гидравлический контур 150 системы 100 управления передвижением. Как указано выше, гидравлическим контуром 150 можно управлять посредством сигналов от контроллера 104 на основании команд от устройств 170 управления передвижением (например, педалей 172a, 172b и рычагов 174a, 174b), чтобы приводить в действие клапанное устройство 152 и ходовые двигатели 158, которые включают в себя левый ходовой двигатель 158a, связанный с левым гусеничным узлом 108, и правый ходовой двигатель 158b, связанный с правым гусеничным узлом 108.
Обычно, для приведения в действие ходовых двигателей 158a, 158b давление жидкости (в качестве «главного давления жидкости»), подаваемой насосом 154, можно направлять через главные регулирующие клапаны 200a, 200b посредством различных труб, шлангов и/или трубопроводов 210, 212a, 212b, 214a, 214b, 216. Чтобы обеспечивать избирательное движение ходовых двигателей 158a, 158b, потоком из насоса 154 можно управлять разными способами (например, через управление различными регулирующими клапанами), включая электро-механические устройства (например, соленоиды). В этом примере главными регулирующими клапанами 200a, 200b, соответственно, управляют контрольные устройства 220a, 220b управления, посредством клапанов 230a, 230b переключения направления, которые приходят в действие в зависимости от вводимых оператором данных на устройствах 170 управления передвижением и переключателя 168 выбора режима направления передвижения. Как описано ниже, положения главных регулирующих клапанов 200a, 200b в сочетании с положениями клапанов 230a, 230b переключения направления определяют направление потока жидкости через ходовые двигатели 158a, 158b и, таким образом, направление движения. Ходовые двигатели 158a, 158b имеют двойные порты, так что давление жидкости в первых портах (например, посредством трубопроводов 212a, 212b) приводит к вращению и передвижению в направлении переднего хода, а давление жидкости в других портах (например, посредством трубопроводов 214a, 214b) приводит к вращению и передвижению в направлении заднего хода.
В связи с этим в изображенной конфигурации гидравлический контур 150 содержит главный регулирующий клапан 200a, клапан 230a переключения направления, контрольное устройство 220a управления и трубопроводы 236a, 238a, 212a, 214a, связанные с левым ходовым двигателем 158a, и главный регулирующий клапан 200b, клапан 230b переключения направления, контрольное устройство 220b управления и трубопроводы 236b, 238b, 212b, 214b, связанные с правым ходовым двигателем 158b. Насос 154, подающий трубопровод 210, возвратный бак 156 и возвратный трубопровод 216 обслуживают обе стороны гидравлического контура 150.
Во время работы на основании команд от устройств 170 управления передвижением (либо непосредственно, либо посредством контроллера 104) контрольные устройства 220a, 220b управления действуют путем избирательного распределения давления жидкости (в качестве «контрольного давления жидкости») посредством первых контрольных сигнальных трубопроводов 236a, 236b и вторых контрольных сигнальных трубопроводов 238a, 238b, через клапан 230a, 230b переключения направления, в главные регулирующие клапаны 200a, 200b. Как показано, контрольные сигнальные трубопроводы 236a, 236b, 238a, 238b гидравлически соединены с каждой стороной главных регулирующих клапанов 200a, 200b. В частности, первые контрольные сигнальные трубопроводы 236a, 236b гидравлически соединены с одной стороной главных регулирующих клапанов 200a, 200b таким образом, что давление жидкости через эти контрольные сигнальные трубопроводы 236a, 236b действует, переводя главные регулирующие клапаны 200a, 200b в первые положения 204a, 204b; а вторые контрольные сигнальные трубопроводы 238a, 238b гидравлически соединены с другой стороной главных регулирующих клапанов 200a, 200b таким образом, что давление жидкости через эти контрольные сигнальные трубопроводы 238a, 238b действует, переводя главные регулирующие клапаны 200a, 200b во вторые положения 206a, 206b. Как описано ниже, положения главных регулирующих клапанов 200a, 200b определяют итоговое направление привода ходовых двигателей 158a, 158b.
Каждый клапан 230a, 230b переключения направления имеет два положения 232a, 232b; 234a, 234b переключения направления, которыми выборочно управляет контроллер 104 на основании вводимых оператором данных на переключателе 168 выбора режима направления передвижения. Как описано более подробно ниже, первые положения 204a, 204b клапанов 230a, 230b переключения направления соответствуют первому режиму направления передвижения, а вторые положения 206a, 206b клапанов 230a, 230b переключения направления соответствуют второму режиму направления передвижения. В частности, при выборе режима направления передвижения на переключателе 168 контроллер 104 генерирует электрический сигнал перемещения клапанов 230a, 230b переключения направления в первые положения 232a, 232b или вторые положения 234a, 234b. Как описано ниже, клапаны 230a, 230b переключения направления действуют, переключая направление контрольного напорного потока через контрольные сигнальные трубопроводы 236a, 236b, 238a, 238b, изменяя посредством этого способ, с помощью которого перемещают главные регулирующие клапаны 200a, 200b. В частности, как обсуждается более подробно ниже, перемещение клапанов 230a, 230b переключения направления изменяет работу главных регулирующих клапанов 200a, 200b относительно устройств 170 управления оператора и контрольных устройств 200a, 200b управления путем выборочного перенаправления (или замены) контрольного давления жидкости с первых контрольных переключающих трубопроводов 236a, 236b на вторые контрольные переключающие трубопроводы 238a, 238b или со вторых контрольных переключающих трубопроводов 238a, 238b на первые контрольные переключающие трубопроводы 236a, 236b.
Как указано выше, левый клапан 230a переключения направления связан с управлением положением левого главного регулирующего клапана 200a, а правый клапан 230b переключения направления связан с управлением положением правого главного регулирующего клапана 200b. Каждый главный регулирующий клапан 200a, 200b имеет три положения, включая нейтральное положение 202a, 202b; первое положение 204a, 204b; и второе положение 206a, 206b. В нейтральном положении 202a, 202b главные регулирующие клапаны 200a, 200b «выключены» и предотвращают прохождение потока из подающего трубопровода 210 насоса 154 через главные регулирующие клапаны 200a, 200b для приведения в действие ходовых двигателей 158a, 158b. Как описано более подробно ниже, при движении главных регулирующих клапанов 200a, 200b в первые или вторые положения 204a, 204b, 206a, 206b насос 154 приводит в движение жидкость через главные регулирующие клапаны 200a, 200b к обозначенным сторонам гидравлических ходовых двигателей 158a, 158b или из них посредством главных трубопроводов 212a, 212b, 214a, 214b управления для приведения в действие двигателей 158a, 158b в выбранном направлении движения. После прохождения через ходовые двигатели 158a, 158b жидкость направляют назад через главные регулирующие клапаны 200a, 200b в бак 156.
Далее будет более подробно описана работа экскаватора 102 в каждом режиме направления передвижения и в каждом направлении движения. В обсуждении ниже левый и правый рычаги 174a, 174b и левую и правую педали 172a, 172b задействуют согласованно, например, так что оператор маневрирует экскаватором 102 в направлениях сравнительно прямо вперед или назад.
Направление переднего хода в первом режиме направления передвижения: Как отмечалось выше, оператор выбирает первый режим направления передвижения посредством переключателя 168 выбора режима направления передвижения. При выборе клапаны 230a, 230b переключения направления переходят в первые положения 232a, 232b (как изображено на фиг. 4). В первом режиме направления передвижения для движения в направлении переднего хода оператор толкает педали 172a, 172b или рычаги 174a, 174b от оператора. В ответ контрольные устройства 220a, 220b управления направляют жидкость через клапаны 230a, 230b переключения направления посредством первых контрольных сигнальных трубопроводов 236a, 236b для помещения главных регулирующих клапанов 200a, 200b в первые положения 204a, 204b. Фактически, с клапанами 230a, 230b переключения направления в первых положениях 232a, 232b клапанов переключения направления в первых контрольных сигнальных трубопроводах 236a, 236b сохраняется контрольное давление жидкости из контрольных устройств 230a, 230b управления. С главными регулирующими клапанами 200a, 200b в первых положениях 204a, 204b насос 154 получает команду создать давление жидкости через подающий трубопровод 210 и через первые главные трубопроводы 212a, 212b управления в соответствующей первой стороне ходовых двигателей 158a, 158b таким образом, чтобы ходовые двигатели 158a, 158b привели в движение соответствующие гусеничные узлы 108 в направлении переднего хода. Жидкость выходит из ходового двигателя 158a, 158b через вторые главные трубопроводы 214a, 214b управления, через главные регулирующие клапаны 200a, 200b и через возвратный трубопровод 216 в бак 156. Соответственно, оператор толкает педали 172a, 172b и рычаги 174a, 174b в первом режиме направления передвижения таким образом, что экскаватор 102 передвигается в направлении переднего хода.
Направление заднего хода в первом режиме направления передвижения: Как отмечалось выше, оператор выбирает первый режим направления передвижения посредством переключателя 168 выбора режима направления передвижения. При выборе клапаны 230a, 230b переключения направления переходят в первые положения 232a, 232b. В первом режиме направления передвижения оператор тянет педали 172a, 172b или рычаги 174a, 174b к оператору для движения в направлении заднего хода. В ответ контрольные устройства 220a, 220b управления направляют жидкость через клапаны 230a, 230b переключения направления посредством вторых контрольных сигнальных трубопроводов 238a, 238b для помещения главных регулирующих клапанов 200a, 200b во вторые положения 206a, 206b. Фактически, с клапанами 230a, 230b переключения направления в первых положениях 232a, 232b клапанов переключения направления сохраняется контрольное давление жидкости из контрольных устройств 230a, 230b управления во вторых контрольных сигнальных трубопроводах 238a, 238b в главные регулирующие клапаны 200a, 200b. С главными регулирующими клапанами 200a, 200b во вторых положениях 206a, 206b насос 154 получает команду создать давление жидкости через подающий трубопровод 210 и через вторые главные трубопроводы 214a, 214b управления на соответствующих вторых сторонах ходовых двигателей 158a, 158b таким образом, чтобы ходовые двигатели 158a, 158b привели в движение соответствующие гусеничные узлы 108 в направлении заднего хода. Фактически, вторые положения 206a, 206b действуют, направляя жидкость назад через трубопроводы управления (например, из первых главных трубопроводов 212a, 212b управления во вторые главные трубопроводы 214a, 214b управления). Жидкость выходит из ходового двигателя 158a, 158b через первые главные трубопроводы 212a, 212b управления, через главные регулирующие клапаны 200a, 200b и через возвратный трубопровод 216 в бак 156. Соответственно, оператор тянет педали 172a, 172b и рычаги 174a, 174b в первом режиме направления передвижения таким образом, что экскаватор передвигается в направлении заднего хода.
Направление переднего хода во втором режиме направления передвижения: Как отмечалось выше, второй режим направления передвижения оператор выбирает посредством переключателя 168 выбора режима направления передвижения. При выборе клапаны 230a, 230b переключения направления переходят во вторые положения 234a, 234b. Относительно первых положений 232a, 232b клапанов 230a, 230b переключения направления вторые положения 234a, 234b изменяют на обратное направление контрольных сигналов через контрольные сигнальные трубопроводы 236a, 236b, 238a, 238b. В связи с этим во втором режиме направления передвижения оператор тянет педали 172a, 172b или рычаги 174a, 174b к оператору для движения в направлении переднего хода; и в ответ контрольные устройства 220a, 220b управления направляют контрольную жидкость через клапаны 230a, 230b переключения направления, которые перенаправляют контрольную жидкость в первые контрольные сигнальные трубопроводы 236a, 236b для помещения главных регулирующих клапанов 200a, 200b в первые положения 204a, 204b. Фактически, с клапанами 230a, 230b переключения направления во вторых положениях 234a, 234b клапанов переключения направления контрольное давление жидкости из контрольных устройств 230a, 230b управления переключается между первыми контрольными сигнальными трубопроводами 236a, 236b и вторыми контрольными сигнальными трубопроводами 236a, 236b в главные регулирующие клапаны 200a, 200b. С главными регулирующими клапанами 200a, 200b в первых положениях 204a, 204b насос 154 получает команду создать давление жидкости через подающий трубопровод 210 и через первые главные трубопроводы 212a, 212b управления в соответствующей первой стороне ходовых двигателей 158a, 158b таким образом, чтобы ходовые двигатели 158a, 158b привели в движение соответствующие гусеничные узлы 108 в направлении переднего хода. Жидкость выходит из ходового двигателя 158a, 158b через вторые главные трубопроводы 214a, 214b управления, через главные регулирующие клапаны 200a, 200b и через возвратный трубопровод 216 в бак 156. Соответственно, во втором режиме направления передвижения оператор тянет педали 172a, 172b и рычаги 174a, 174b таким образом, что экскаватор передвигается в направлении переднего хода.
Направление заднего хода во втором режиме направления передвижения: Как отмечалось выше, второй режим направления передвижения оператор выбирает посредством переключателя 168 выбора режима направления передвижения. При выборе клапаны 230a, 230b переключения направления переходят во вторые положения 234a, 234b. Относительно первых положений 232a, 232b клапанов 230a, 230b переключения направления вторые положения 234a, 234b изменяют на обратное прохождение сигналов контрольной жидкости относительно первого режима направления передвижения через вторые контрольные сигнальные трубопроводы 238a, 238b (вместо первых контрольных сигнальных трубопроводов 236a, 236b в первом режиме направления передвижения). В связи с этим во втором режиме направления передвижения для движения в направлении заднего хода оператор толкает педали 172a, 172b или рычаги 174a, 174b от оператора; и в ответ контрольные устройства 220a, 220b управления направляют жидкость через клапаны 230a, 230b переключения направления посредством вторых контрольных сигнальных трубопроводов 238a, 238b для переведения главных регулирующих клапанов 200a, 200b во вторые положения 206a, 206b. Фактически, с клапанами 230a, 230b переключения направления во вторых положениях 234a, 234b клапанов переключения направления контрольное давление жидкости из контрольных устройств 230a, 230b управления переключается между первыми контрольными сигнальными трубопроводами 236a, 236b и вторыми контрольными сигнальными трубопроводами 236a, 236b в главные регулирующие клапаны 200a, 200b. С главными регулирующими клапанами 200a, 200b во вторых положениях 206a, 206b насос 154 получает команду создать давление жидкости через подающий трубопровод 210 и через вторые главные трубопроводы 214a, 214b управления на соответствующих вторых сторонах ходовых двигателей 158a, 158b таким образом, чтобы ходовые двигатели 158a, 158b привели в движение соответствующие гусеничные узлы 108 в направлении заднего хода. Жидкость выходит из ходового двигателя 158a, 158b через первые главные трубопроводы 212a, 212b управления, через главные регулирующие клапаны 200a, 200b и через возвратный трубопровод 216 в бак 156. Соответственно, оператор толкает педали 172a, 172b и рычаги 174a, 174b во втором режиме направления передвижения таким образом, что экскаватор передвигается в направлении заднего хода.
В некоторых вариантах осуществления гидравлический контур 150 может быть заменен или модифицирован электрическим или электро-гидравлическим устройством управления в качестве главного механизма распределения управляющего давления для управления связью между устройствами управления оператора и ходовыми двигателями. В качестве одного примера в гидравлическом контуре 150 можно исключить контрольные устройства 220a, 220b управления и клапаны 230a, 230b переключения направления, и контроллер 104 может прямо подавать команды в главные регулирующие клапаны 200a, 200b на основании выбора режима на переключателе 168 выбора режима направления передвижения для работы следующим образом: в первом режиме направления передвижения с вводимым направлением вперед контроллер 104 подает команды переключения главных регулирующих клапанов 200a, 200b в первое положение 204a, 204b для приведения в действие ходовых двигателей 158a, 158b в первом направление движения; в первом режиме направления передвижения с вводимым направлением назад контроллер 104 подает команды переключения главных регулирующих клапанов 200a, 200b во второе положение 206a, 206b для приведения в действие ходовых двигателей 158a, 158b во втором направлении движения; во втором режиме направления передвижения с вводимым направлением назад контроллер 104 подает команды переключения главных регулирующих клапанов 200a, 200b в первое положение 204a, 204b для приведения в действие ходовых двигателей 158a, 158b в первом направление движения; а во втором режиме направления передвижения с вводимым направлением вперед контроллер 104 подает команды переключения главных регулирующих клапанов 200a, 200b в первое положение 204a, 204b для приведения в действие ходовых двигателей 158a, 158b во втором направлении движения. Фактически, вводимые направления устройств 170 ввода команд управления переводятся в команды в главные регулирующие клапаны 200a, 200b на основании выбранного режима направления передвижения. В качестве дополнительного примера, контроллер 104 может прямо подавать команды в ходовые двигатели 158a, 158b, конкретно в вариантах осуществления, в которых ходовые двигатели 158a, 158b представляют собой электрические двигатели.
Кроме того, некоторые примеры могут включать в себя систему 100 управления передвижением, которая дополнительно учитывает положение кабины 110 относительно рамы 106. В частности, на раме 106 и/или кабине 110 может быть представлен датчик 164 положения, который указывает положение кабины 110 (и оператора) относительно рамы 106. В ответ, когда кабина 110 ориентирована в том же направлении, что и рама 106, система 100 управления передвижением может автоматически работать в первом режиме направления передвижения или предложить оператору (через устройство 180 отображения) управлять в первом режиме направления передвижения; а когда кабина 110 ориентирована в противоположном направлении к раме 106, система 100 управления передвижением может автоматически работать во втором режиме направления передвижения или предложить оператору (через устройство 180 отображения) управлять во втором режиме направления передвижения.
Соответственно, в вариантах осуществления, обсуждаемых в данном документе, представлены системы и способы управления передвижением рабочего транспортного средства, в которых пользователь может выбирать направление передвижения, связанное с устройствами управления. Это обеспечивает улучшенные характеристики, учет предпочтений оператора, более комфортную работу и пониженный износ транспортного средства по сравнению с обычными системами, конкретно таким образом, что не требуется фундаментальное изменение компоновки или конструкции обычных систем управления или приведения в движение, связанных с земляными работами.
Как будет понятно специалисту в данной области техники, некоторые аспекты раскрытого предмета изобретения могут быть исполнены в виде способа, системы (например, системы управления рабочим транспортным средством, находящейся в рабочем транспортном средстве) или компьютерного программного продукта. Соответственно, некоторые варианты осуществления можно реализовать полностью в виде аппаратных средств, полностью в виде программного обеспечения (включая встроенное программное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или в виде комбинации программного обеспечения и аппаратных средств (и других) аспектов. Кроме того, некоторые варианты осуществления могут принимать вид компьютерного программного продукта на используемом в компьютере носителе данных, имеющего используемый в компьютере программный код, реализованный на носителе.
В рамках настоящего изобретения термин модуль относится к любым аппаратным средствам, программному обеспечению, встроенному программному обеспечению, электронному компоненту управления, логической схеме для обработки и/или процессорному устройству, отдельно или в любой комбинации, включая без ограничения: специализированную интегральную схему (ASIC), электронную схему, процессор (коллективный, выделенный или групповой) и память, которые выполняют одну или более программ программного обеспечения или встроенного программного обеспечения, комбинационную логическую схему и/или другие подходящие компоненты, которые обеспечивают описанные функций.
Варианты осуществления настоящего изобретения могут быть описаны в данном документе в терминах компонентов функциональных и/или логических блоков и различных этапов обработки. Следует понимать, что компоненты таких блоков могут быть реализованы с помощью любого количества компонентов аппаратных средств, программного обеспечения и/или встроенного программного обеспечения, выполненных с возможностью осуществления указанных функций. Например, в варианте осуществления настоящего изобретения можно задействовать различные компоненты интегральных схем, например, элементы памяти, элементы обработки цифровых сигналов, логические элементы, справочные таблицы и тому подобное, которые могут выполнять множество функций под управлением одного или более микропроцессоров или других устройств управления. Кроме того, специалистам в данной области техники следует понимать, что варианты осуществления настоящего изобретения можно применять на практике в сочетании с любым количеством систем и что рабочие транспортные средства и системы и способы управления, описанные в данном документе, являются всего лишь иллюстративными вариантами осуществления настоящего изобретения.
Для краткости в данном документе могут быть не описаны подробно обычные методы, относящиеся к обработке сигналов, передаче данных, передаче сигналов, управлению и другим функциональным аспектам систем (и отдельных рабочих компонентов систем). Кроме того, содержащиеся в данном документе соединительные трубопроводы, показанные на разных фигурах, предназначены для отображения иллюстративных функциональных взаимосвязей и/или физических соединений между различными элементами. Следует заметить, что в одном варианте осуществления настоящего изобретения может быть представлено множество альтернативных или дополнительных функциональных взаимосвязей или физических соединений.
Можно использовать любой подходящий используемый в компьютере или машиночитаемый носитель. Используемым в компьютере носителем может быть машиночитаемый носитель сигналов или машиночитаемый носитель данных. Используемый в компьютере или машиночитаемый носитель данных (включая устройство хранения, связанное с вычислительным устройством или пользовательским электронным устройством) может представлять собой, например, но без ограничения, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, аппарат или устройство, или любую подходящую комбинацию вышеизложенного. Более конкретные примеры (неисчерпывающий список) машиночитаемого носителя могут включать в себя следующее: электрическое соединение, имеющее один или более проводов, портативную компьютерную дискету, жесткий диск, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (EPROM или флеш-память), оптическое волокно, постоянное запоминающее устройство на портативном компакт-диске (CD-ROM), оптическое устройство хранения. В контексте этого документа используемый в компьютере или машиночитаемый, носитель данных может представлять собой любой материальный носитель, на котором можно содержать или хранить программу для использования системой, аппаратом или устройством выполнения команд или в связи с ними.
Машиночитаемый носитель сигналов может содержать распространяемый сигнал данных с реализованным в нем машиночитаемым программным кодом, например, в основной полосе частот или в виде части несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, включая, но без ограничения, электро-магнитную, оптическую или любую подходящую их комбинацию. Машиночитаемый носитель сигналов может быть предназначен для долговременного хранения и может представлять собой любой машиночитаемый носитель, который не является машиночитаемым носителем данных и который может передавать, распространять или транспортировать программу для использования системой, аппаратом или устройством выполнения команд или в связи с ними.
Аспекты некоторых вариантов осуществления, описанных в данном документе, могут быть описаны со ссылкой на иллюстрации графических схем и/или блок-схемы способов, устройства (системы) и компьютерные программные продукты согласно вариантам осуществления изобретения. будет понятно, что каждый блок любых таких иллюстраций графических схем и/или блок-схем и комбинации блоков на таких иллюстрациях графических схем и/или блок-схемах можно реализовать с помощью команд компьютерной программы. Эти команды компьютерной программы могут быть предоставлены в процессор компьютера общего назначения, компьютера специального назначения или другого программируемого устройства обработки данных для получения машины таким образом, что команды, которые выполняют посредством процессора компьютера или другого программируемого устройства обработки данных, создают средство выполнения функций/действий, указанных в блоке или блоках графической схемы и/или блок-схемы.
Эти команды компьютерной программы также можно хранить в машиночитаемой памяти, которая может конкретным образом направлять функционирование компьютера или другого программируемого устройства обработки данных таким образом, чтобы создавать с помощью сохраненных в машиночитаемой памяти команд готовое изделие, включая команды, которые исполняют функцию/действие, указанное в блоке или блоках графической схемы и/или блок-схемы.
Команды компьютерной программы также можно загружать в компьютер или другое программируемое устройство обработки данных, чтобы обеспечить выполнение на компьютере или в другом программируемом устройстве серию операционных этапов для получения реализуемого на компьютере процесса таким образом, что команды, которые выполняются на компьютере или другом программируемом устройстве, обеспечивают этапы для осуществления функций/действий, указанных в блоке или блоках графической схемы и/или блок-схемы.
Любая графическая схема и блок-схемы на фигурах или в аналогичном обсуждении выше могут иллюстрировать архитектуру, функциональность и работу возможных вариантов осуществления систем, способов и компьютерных программных продуктов согласно различным вариантам осуществления настоящего изобретения. В связи с этим каждый блок в графической схеме и/или блок-схемах может представлять модуль, сегмент или часть кода, который содержит одну или более исполненных команд для осуществления указанной логической функции (функций). Также нужно заметить, что, в некоторых альтернативных вариантах исполнения функции, отмеченные в блоке (или иным образом описанные в данном документе), могут происходить не в порядке, отмеченном на фигурах. Например, два блока, показанных последовательно (или две операции, описанные последовательно), в действительности можно выполнять по существу одновременно, или блоки (или операции) иногда можно выполнять в обратном порядке, в зависимости от задействованных функций. Также следует отметить, что каждый блок любой иллюстрации графических схем и/или блок-схемах и комбинации блоков на любых иллюстрациях графических схем и/или блок-схем можно реализовать с помощью систем специального назначения на основе аппаратных средств, которые выполняют указанные функции или действия, или с помощью комбинаций аппаратных средств специального назначения и компьютерных команд.
Терминология, используемая в данном документе, предназначена только для цели описания конкретных вариантов осуществления и не предназначена для ограничения изобретения. В рамках настоящего изобретения формы единственного числа также предназначены для включения форм множественного числа, если из контекста явно не следует иное. Кроме того, должно быть понятно, что термины «содержит» и/или «содержащий» при использовании в этом описании определяют наличие заявленных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают наличия или добавления одного или более других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп.
Также, предоставлены следующие примеры, которые пронумерованы для облегчения ссылки.
1. Система управления передвижением для рабочего транспортного средства с гусеничным узлом, содержащая: ходовой двигатель, выполненный с возможностью приведения в действие в направлении переднего хода для приведения в движение гусеничного узла в направлении переднего хода и в направлении заднего хода для приведения в движение гусеничного узла в направлении заднего хода; по меньшей мере одно устройство управления передвижением, выполненное с возможностью приведения в действие оператором в первом вводимом направлении и втором вводимом направлении; и механизм переключения передвижения, соединенный с ходовым двигателем и по меньшей мере одним устройством управления передвижением; причем механизм переключения передвижения выполнен с возможностью работы в первом режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении переднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении заднего хода; и при этом гидравлический контур выполнен с возможностью работы во втором режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении заднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении переднего хода.
2. Система управления передвижением согласно примеру 1, в которой механизм переключения передвижения содержит гидравлический контур, содержащий: насос, гидравлически соединенный с ходовым двигателем для обеспечения главного давления жидкости для приведения в действие ходового двигателя; и главный регулирующий клапан, гидравлически присоединенный между насосом и ходовым двигателем для управления главным давлением жидкости в ходовой двигатель, причем главный регулирующий клапан имеет первое положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении переднего хода, и второе положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении заднего хода.
3. Система управления передвижением согласно примеру 2, в которой гидравлический контур дополнительно содержит: контрольное устройство управления, гидравлически присоединенное для создания контрольного давления жидкости для перемещения главного регулирующего клапана между первым положением главного регулирующего клапана и вторым положением главного регулирующего клапана; и клапан переключения направления, гидравлически присоединенный между контрольным устройством управления и главным регулирующим клапаном, причем клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения.
4. Система управления передвижением согласно примеру 3, в которой контрольное устройство управления гидравлически соединено с главным регулирующим клапаном посредством клапана переключения направления с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода для подачи контрольного давления жидкости в главный регулирующий клапан.
5. Система управления передвижением согласно примеру 4, в которой, когда клапан переключения направления находится в первом положении клапана переключения направления, в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе контрольное давление жидкости из контрольного устройства управления сохраняется относительно главного регулирующего клапана, и при этом, когда клапан переключения направления находится во втором положении клапана переключения направления, контрольное давление жидкости из контрольного устройства управления в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе меняется относительно главного регулирующего клапана.
6. Система управления передвижением согласно примеру 5, дополнительно содержащая контроллер, выполненный с возможностью передвижения клапана переключения направления между первым положением клапана переключения направления и вторым положением клапана переключения направления.
7. Система управления передвижением согласно примеру 6, дополнительно содержащая переключатель выбора режима направления передвижения, соединенный с клапаном переключения направления; причем переключатель выбора режима направления передвижения выполнен с возможностью получения первых входных данных выбора режима направления, представляющих первый режим направления передвижения, а в ответ подачи команды перевода клапана переключения направления в первое положение клапана переключения направления; и при этом переключатель выбора режима направления передвижения выполнен с возможностью получения вторых входных данных выбора режима направления, представляющих второй режим направления передвижения, а в ответ подачи команды перевода клапана переключения направления во второе положение клапана переключения направления.
8. Система управления передвижением согласно примеру 2, в которой по меньшей мере одно устройство управления передвижением содержит ручной рычаг, выполненный с возможностью приведения в действие оператором путем поворота ручного рычага от оператора в качестве первого вводимого направления и к оператору в качестве второго вводимого направления.
9. Система управления передвижением согласно примеру 2, в которой по меньшей мере одно устройство управления передвижением содержит ножную педаль, выполненную с возможностью приведения в действие оператором путем поворота ножной педали от оператора в качестве первого вводимого направления и к оператору в качестве второго вводимого направления.
10. Система управления передвижением согласно примеру 2, в которой клапан переключения направления гидравлически соединен с главным регулирующим клапаном с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода, и при этом клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения; причем ходовой двигатель гидравлически соединен с главным регулирующим клапаном посредством первого главного трубопровода и второго главного трубопровода; при этом в первом режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением в первом вводимом направлении, клапан переключения направления направляет контрольное давление жидкости из контрольного устройства управления через первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан в первое положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через первый главный трубопровод для приведения в действие ходового двигателя в первом направление движения; при этом в первом режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением во втором вводимом направлении, клапан переключения направления направляет контрольное давление жидкости из контрольного устройства управления через второй контрольный сигнальный трубопровод, помещая главный регулирующий клапан во второе положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через второй главный трубопровод для приведения в действие ходового двигателя во втором направлении движения; при этом во втором режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением во втором вводимом направлении, клапан переключения направления перенаправляет контрольное давление жидкости из контрольного устройства управления в первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан в первое положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через первый главный трубопровод для приведения в действие ходового двигателя в первом направление движения; и при этом во втором режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением в первом вводимом направлении, клапан переключения направления перенаправляет контрольное давление жидкости из контрольного устройства управления в первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан во второе положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через второй главный трубопровод для приведения в действие ходового двигателя во втором направлении движения.
11. Рабочее транспортное средство, содержащее: раму; кабину, установленную на раме; устройство управления передвижением, расположенное внутри кабины и выполненное с возможностью приведения в действие оператором в первом вводимом направлении и втором вводимом направлении; грунтозацепный механизм, установленный на раме; ходовой двигатель, соединенный с рамой и грунтозацепным механизмом, причем ходовой двигатель выполнен с возможностью выборочного приведения в движение грунтозацепного механизма на основании команд от устройства управления передвижением в направлении переднего хода и в направлении заднего хода; и механизм переключения передвижения, соединенный с ходовым двигателем и по меньшей мере одним устройством управления передвижением; причем механизм переключения передвижения выполнен с возможностью работы в первом режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении переднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении заднего хода; и при этом механизм переключения передвижения выполнен с возможностью работы во втором режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении заднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении переднего хода.
12. Рабочее транспортное средство согласно примеру 11, в котором механизм переключения передвижения содержит гидравлический контур, а грунтозацепный механизм содержит гусеничный узел, причем гидравлический контур содержит: насос, гидравлически соединенный с ходовым двигателем для обеспечения главного давления жидкости для приведения в действие ходового двигателя; и главный регулирующий клапан, гидравлически присоединенный между насосом и ходовым двигателем для управления главным давлением жидкости в ходовой двигатель, причем главный регулирующий клапан имеет первое положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении переднего хода, и второе положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении заднего хода.
13. Рабочее транспортное средство согласно примеру 12, в котором гидравлический контур дополнительно содержит: контрольное устройство управления, гидравлически присоединенное для создания контрольного давления жидкости для перемещения главного регулирующего клапана между первым положением главного регулирующего клапана и вторым положением главного регулирующего клапана; и клапан переключения направления, гидравлически присоединенный между контрольным устройством управления и главным регулирующим клапаном, причем клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения.
14. Рабочее транспортное средство согласно примеру 13, в котором контрольное устройство управления гидравлически соединено с главным регулирующим клапаном посредством клапана переключения направления с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода для подачи контрольного давления жидкости в главный регулирующий клапан.
15. Рабочее транспортное средство согласно примеру 14, в котором, когда клапан переключения направления находится в первом положении клапана переключения направления, в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе контрольное давление жидкости из контрольного устройства управления сохраняется относительно главного регулирующего клапана; и при этом, когда клапан переключения направления находится во втором положении клапана переключения направления, контрольное давление жидкости из контрольного устройства управления в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе меняется относительно главного регулирующего клапана.
Описание настоящего изобретения было представлено для целей пояснения и описания, но не является исчерпывающим или ограничивающим изобретение в раскрытом виде. Специалистам в данной области техники будут очевидны многие модификации и варианты, не выходящие за рамки объема и сущности изобретения. Варианты осуществления, на которые в данном документе была сделана явная ссылка, были выбраны и описаны для наилучшего объяснения принципов изобретения и их практического применения и чтобы позволить другим специалистам в данной области техники понять изобретение и распознать множество альтернативных решений, модификаций и вариантов описанного примера (примеров). Соответственно, различные варианты осуществления и варианты исполнения, отличные от явно описанных, находятся в рамках объема следующей формулы изобретения.
Изобретение относится к системе управления передвижением рабочей машины. Система управления содержит ходовой двигатель, гусеничный узел, устройство управления передвижением и механизм переключения передвижения. В первом режиме в первом вводимом направлении ходовой двигатель приводит в действие в направлении переднего хода, а во втором вводимом направлении ходовой двигатель приводит в действие в направлении заднего хода. Во втором режиме в первом вводимом направлении ходовой двигатель приводит в действие в направлении заднего хода, а во втором вводимом направлении ходовой двигатель приводит в действие в направлении переднего хода. Достигается комфортность управления передвижением рабочей машины, приводящая к повышению срока службы гусениц. 2 н. и 18 з.п. ф-лы, 4 ил.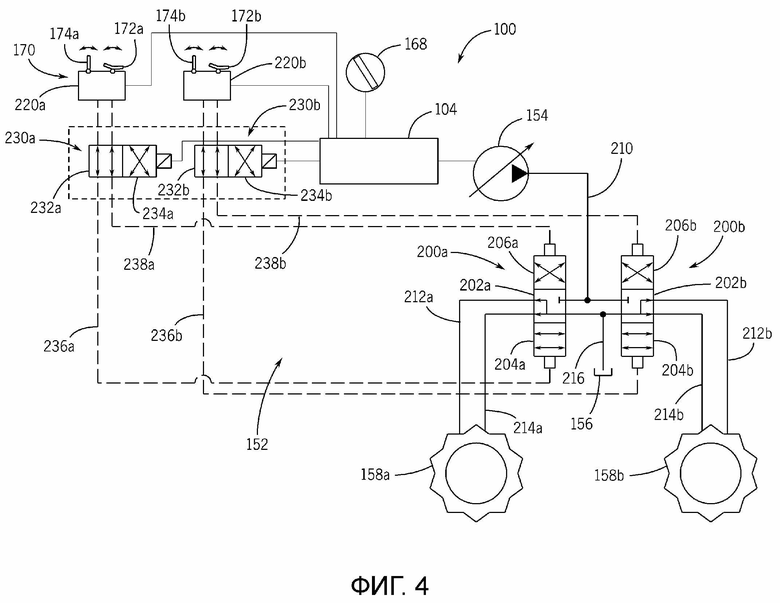
1. Система управления передвижением для рабочего транспортного средства с гусеничным узлом, содержащая
ходовой двигатель, выполненный с возможностью приведения в действие в направлении переднего хода для приведения в движение гусеничного узла в направлении переднего хода и в направлении заднего хода для приведения в движение гусеничного узла в направлении заднего хода;
по меньшей мере одно устройство управления передвижением, выполненное с возможностью приведения в действие оператором в первом вводимом направлении и втором вводимом направлении; и
механизм переключения передвижения, соединенный с ходовым двигателем и по меньшей мере одним устройством управления передвижением;
причем механизм переключения передвижения выполнен с возможностью работы в первом режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении переднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении заднего хода; и
при этом гидравлический контур выполнен с возможностью работы во втором режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении заднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение гусеничного узла в направлении переднего хода.
2. Система управления передвижением по п. 1, в которой механизм переключения передвижения содержит гидравлический контур, содержащий
насос, гидравлически соединенный с ходовым двигателем для обеспечения главного давления жидкости для приведения в действие ходового двигателя; и
главный регулирующий клапан, гидравлически присоединенный между насосом и ходовым двигателем для управления главным давлением жидкости в ходовой двигатель, причем главный регулирующий клапан имеет первое положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении переднего хода, и второе положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении заднего хода.
3. Система управления передвижением по п. 2, в которой гидравлический контур дополнительно содержит
контрольное устройство управления, гидравлически присоединенное для создания контрольного давления жидкости для перемещения главного регулирующего клапана между первым положением главного регулирующего клапана и вторым положением главного регулирующего клапана; и
клапан переключения направления, гидравлически присоединенный между контрольным устройством управления и главным регулирующим клапаном, причем клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения.
4. Система управления передвижением по п. 3, в которой контрольное устройство управления гидравлически соединено с главным регулирующим клапаном посредством клапана переключения направления с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода для подачи контрольного давления жидкости в главный регулирующий клапан.
5. Система управления передвижением по п. 4, в которой, когда клапан переключения направления находится в первом положении клапана переключения направления, в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе контрольное давление жидкости из контрольного устройства управления сохраняется относительно главного регулирующего клапана, а когда клапан переключения направления находится во втором положении клапана переключения направления, контрольное давление жидкости из контрольного устройства управления в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе меняется относительно главного регулирующего клапана.
6. Система управления передвижением по п. 5, дополнительно содержащая контроллер, выполненный с возможностью передвижения клапана переключения направления между первым положением клапана переключения направления и вторым положением клапана переключения направления.
7. Система управления передвижением по п. 6, дополнительно содержащая переключатель выбора режима направления передвижения, соединенный с клапаном переключения направления;
причем переключатель выбора режима направления передвижения выполнен с возможностью получения первых входных данных выбора режима направления, представляющих первый режим направления передвижения, а в ответ подачи команды перевода клапана переключения направления в первое положение клапана переключения направления; и
при этом переключатель выбора режима направления передвижения выполнен с возможностью получения вторых входных данных выбора режима направления, представляющих второй режим направления передвижения, а в ответ подачи команды перевода клапана переключения направления во второе положение клапана переключения направления.
8. Система управления передвижением по п. 2, в которой по меньшей мере одно устройство управления передвижением содержит ручной рычаг, выполненный с возможностью приведения в действие оператором путем поворота ручного рычага от оператора в качестве первого вводимого направления и к оператору в качестве второго вводимого направления.
9. Система управления передвижением по п. 2, в которой по меньшей мере одно устройство управления передвижением содержит ножную педаль, выполненную с возможностью приведения в действие оператором путем поворота ножной педали от оператора в качестве первого вводимого направления и к оператору в качестве второго вводимого направления.
10. Система управления передвижением по п. 2, в которой клапан переключения направления гидравлически соединен с главным регулирующим клапаном с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода, и при этом клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения;
причем ходовой двигатель гидравлически соединен с главным регулирующим клапаном посредством первого главного трубопровода и второго главного трубопровода;
причем в первом режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением в первом вводимом направлении, клапан переключения направления направляет контрольное давление жидкости из контрольного устройства управления через первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан в первое положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через первый главный трубопровод для приведения в действие ходового двигателя в первом направлении движения;
причем в первом режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением во втором вводимом направлении, клапан переключения направления направляет контрольное давление жидкости из контрольного устройства управления через второй контрольный сигнальный трубопровод, помещая главный регулирующий клапан во второе положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через второй главный трубопровод для приведения в действие ходового двигателя во втором направлении движения;
при этом во втором режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением во втором вводимом направлении, клапан переключения направления перенаправляет контрольное давление жидкости из контрольного устройства управления в первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан в первое положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через первый главный трубопровод для приведения в действие ходового двигателя в первом направлении движения; и
при этом во втором режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением в первом вводимом направлении, клапан переключения направления перенаправляет контрольное давление жидкости из контрольного устройства управления в первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан во второе положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через второй главный трубопровод для приведения в действие ходового двигателя во втором направлении движения.
11. Рабочее транспортное средство, содержащее
раму;
кабину, установленную на раме;
устройство управления передвижением, расположенное внутри кабины и выполненное с возможностью приведения в действие оператором в первом вводимом направлении и втором вводимом направлении;
грунтозацепный механизм, установленный на раме;
ходовой двигатель, соединенный с рамой и грунтозацепным механизмом, причем ходовой двигатель выполнен с возможностью выборочного приведения в движение грунтозацепного механизма на основании команд от устройства управления передвижением в направлении переднего хода и в направлении заднего хода; и
механизм переключения передвижения, соединенный с ходовым двигателем и по меньшей мере одним устройством управления передвижением;
причем механизм переключения передвижения выполнен с возможностью работы в первом режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении переднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении заднего хода; и
при этом механизм переключения передвижения выполнен с возможностью работы во втором режиме направления передвижения, в котором при приведении в действие по меньшей мере одного устройства управления передвижением в первом вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении заднего хода, а при приведении в действие по меньшей мере одного устройства управления передвижением во втором вводимом направлении ходовой двигатель приходит в действие с приведением в движение грунтозацепного механизма в направлении переднего хода.
12. Рабочее транспортное средство по п. 11, в котором механизм переключения передвижения содержит гидравлический контур, а грунтозацепный механизм содержит гусеничный узел,
причем гидравлический контур содержит
насос, гидравлически соединенный с ходовым двигателем для обеспечения главного давления жидкости для приведения в действие ходового двигателя; и
главный регулирующий клапан, гидравлически присоединенный между насосом и ходовым двигателем для управления главным давлением жидкости в ходовой двигатель, причем главный регулирующий клапан имеет первое положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении переднего хода, и второе положение главного регулирующего клапана, в котором главное давление жидкости направлено на приведение в действие ходового двигателя в направлении заднего хода.
13. Рабочее транспортное средство по п. 12, в котором гидравлический контур дополнительно содержит
контрольное устройство управления, гидравлически присоединенное для создания контрольного давления жидкости для перемещения главного регулирующего клапана между первым положением главного регулирующего клапана и вторым положением главного регулирующего клапана; и
клапан переключения направления, гидравлически присоединенный между контрольным устройством управления и главным регулирующим клапаном, причем клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения.
14. Рабочее транспортное средство по п. 13, в котором контрольное устройство управления гидравлически соединено с главным регулирующим клапаном посредством клапана переключения направления с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода для подачи контрольного давления жидкости в главный регулирующий клапан.
15. Рабочее транспортное средство по п. 14, в котором, когда клапан переключения направления находится в первом положении клапана переключения направления, в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе контрольное давление жидкости из контрольного устройства управления сохраняется относительно главного регулирующего клапана; а
когда клапан переключения направления находится во втором положении клапана переключения направления, контрольное давление жидкости из контрольного устройства управления в первом контрольном сигнальном трубопроводе и втором контрольном сигнальном трубопроводе меняется относительно главного регулирующего клапана.
16. Рабочее транспортное средство по п. 15, дополнительно содержащее контроллер, выполненный с возможностью передвижения клапана переключения направления между первым положением клапана переключения направления и вторым положением клапана переключения направления.
17. Рабочее транспортное средство по п. 16, дополнительно содержащее переключатель выбора режима направления передвижения, соединенный с клапаном переключения направления;
причем переключатель выбора режима направления передвижения выполнен с возможностью получения первых входных данных выбора режима направления, представляющих первый режим направления передвижения, а в ответ подачи команды перевода клапана переключения направления в первое положение клапана переключения направления; и
при этом переключатель выбора режима направления передвижения выполнен с возможностью получения вторых входных данных выбора режима направления, представляющих второй режим направления передвижения, а в ответ подачи команды перевода клапана переключения направления во второе положение клапана переключения направления.
18. Рабочее транспортное средство по п. 12, в котором по меньшей мере одно устройство управления передвижением содержит ручной рычаг, выполненный с возможностью приведения в действие оператором путем поворота ручного рычага от оператора в качестве первого вводимого направления и к оператору в качестве второго вводимого направления.
19. Рабочее транспортное средство по п. 12, в котором по меньшей мере одно устройство управления передвижением содержит ножную педаль, выполненную с возможностью приведения в действие оператором путем поворота ножной педали от оператора в качестве первого вводимого направления и к оператору в качестве второго вводимого направления.
20. Рабочее транспортное средство по п. 12, в котором клапан переключения направления гидравлически соединен с главным регулирующим клапаном с помощью первого контрольного сигнального трубопровода и второго контрольного сигнального трубопровода, и при этом клапан переключения направления имеет первое положение переключения направления, связанное с первым режимом направления передвижения, и второе положение переключения направления, связанное со вторым режимом направления передвижения;
причем ходовой двигатель гидравлически соединен с главным регулирующим клапаном посредством первого главного трубопровода и второго главного трубопровода;
причем в первом режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением в первом вводимом направлении, клапан переключения направления направляет контрольное давление жидкости из контрольного устройства управления через первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан в первое положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через первый главный трубопровод для приведения в действие ходового двигателя в первом направлении движения;
при этом в первом режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением во втором вводимом направлении, клапан переключения направления направляет контрольное давление жидкости из контрольного устройства управления через второй контрольный сигнальный трубопровод, помещая главный регулирующий клапан во второе положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через второй главный трубопровод для приведения в действие ходового двигателя во втором направлении движения;
при этом во втором режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением во втором вводимом направлении, клапан переключения направления перенаправляет контрольное давление жидкости из контрольного устройства управления в первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан в первое положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через первый главный трубопровод для приведения в действие ходового двигателя в первом направлении движения;
при этом во втором режиме направления передвижения и когда оператор приводит в действие по меньшей мере одно устройство управления передвижением в первом вводимом направлении, клапан переключения направления перенаправляет контрольное давление жидкости из контрольного устройства управления в первый контрольный сигнальный трубопровод, помещая главный регулирующий клапан во второе положение главного регулирующего клапана таким образом, что главное давление жидкости из насоса направляется через второй главный трубопровод для приведения в действие ходового двигателя во втором направлении движения.
| Гидравлический привод | 1983 |
|
SU1096409A1 |
| Подмости для отделочных работ | 1937 |
|
SU53743A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ МНОГОКОЛЕСНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2004 |
|
RU2264572C1 |
| ГИДРОПРИВОД САМОХОДНОЙ МАШИНЫ | 1992 |
|
RU2037434C1 |
| Устройство измерения магнитной составляющей вибрации электрических машин | 1986 |
|
SU1410197A1 |

