Предлагаемое изобретение относится к области разработки нефтяных месторождений, более подробно - к контролю за производительностью установки штангового глубинного насоса (далее УШГН), для обеспечения добычи нефти в соответствии с заданным технологическим режимом на скважину.
Как известно из исследованного заявителем уровня техники, обеспечение мониторинга работы скважин и своевременного определения неисправности УШГН является перспективной вследствие высокой доли труда технологов в анализе и интерпретации входных данных со скважин, доходящей до 80-90% от затрачиваемого времени от получения информации, её обработки, интерпретации до принятия управленческого решения по существу.
Далее заявителем представлены термины и понятийный аппарат, используемый в заявленном техническом решении, для исключения противоречий и более полного понимания сущности заявленного технического решения.
1. Машинное обучение - класс методов искусственного интеллекта, характерной чертой которых является не прямое решение задачи, а обучение в процессе применения решений множества сходных задач. Для построения таких методов используются средства математической статистики, численных методов, математического анализа, методов оптимизации, теории вероятностей, теории графов, различные техники работы с данными в цифровой форме
[https://ru.wikipedia.org/wiki/%D0%9C%D0%B0%D1%88%D0%B8%D0%BD%D0%BD%D0%BE%D0%B5_%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5].
В заявленном способе применены методы математической статистики, численные методы, методы математического анализа, на основе которых создана программа для ЭВМ, позволяющая интерпретировать динамограммы на основе обучения по постоянно пополняемой статистической базе.
2. Динамограмма - в нефтедобыче, график изменения нагрузки в точке подвеса насосных штанг в зависимости от их перемещения при глубинно-насосной эксплуатации нефтяных скважин.
[https://gufo.me/dict/bse/%D0%94%D0%B8%D0%BD%D0%B0%D0%BC%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0]
3. УШГН (установка штангового глубинного насоса) - это глубинные насосы штангового типа. Представляют собой устройство, при помощи которых можно откачивать жидкие среды из скважин, характеризующихся значительной глубиной. Оборудование УШГН состоит из погружной части, плунжера, шарового и обратного клапана соответственно
[https://ru.wikipedia.org/wiki/%D0%A8%D1%82%D0%B0%D0%BD%D0%B3%D0%BE%D0%B2%D1%8B%D0%B9_%D0%B3%D0%BB%D1%83%D0%B1%D0%B8%D0%BD%D0%BD%D1%8B%D0%B9_%D0%BD%D0%B0%D1%81%D0%BE%D1%81].
Контроль за работой УШГН скважин на дату представления заявочных материалов осуществляется различными способами, в том числе снятием нагрузки на устьевом штоке посредством динамографа, при движении колонны штанг вверх и вниз, причем диаграмму нагрузки называют динамограммой, а ее снятие - динамометрированием.
Эксплуатация добывающих нефтяных скважин, оборудованных УШГН, сопряжена такими осложняющими факторами, как:
- высоким газосодержанием в добываемой продукции,
- повышенным содержанием песка в добываемой продукции,
- наличием высоковязких нефтей и эмульсий,
- существенным искривлением ствола скважины,
- отложениями парафина и минеральных солей,
- высокой температурой и др.
Эти факторы влияют на снижение производительности насоса и также могут привести к его выходу из строя. Борьба с осложняющими факторами ведётся с применением различных профилактических мер, в том числе диагностированием в режиме реального времени характера работы УШГН.
При этом проблема оперативного анализа эксплуатации УШГН на дату подачи заявочных материалов актуальна по нескольким причинам:
- человеческого фактора, отражающегося как в опыте технолога по умению интерпретировать динамограммы, так и в скорости и качестве их обработки;
- постоянно повышающегося уровня автоматизации месторождений, который сопровождается значительным увеличением потока информации по динамометрированию со скважин, в силу чего требуется максимально быстрая и достоверная их интерпретация и, соответственно, значительное увеличение трудозатрат технологов.
Принимая во внимание данные факты, а также то, что автоматизация обработки динамограмм и сигнализации отклонения эксплуатации УШГН от оптимальных параметров на дату представления заявочных материалов находятся в основном на стадии использования сложных и, как правило, дорогостоящих программно-аппаратных комплексов (см. далее более детально по тексту), становится актуальным вопрос автоматизации интерпретации динамограмм с минимальным участием технологов. По мнению заявителя, вопрос может быть разрешен посредством использования разработанных заявителем программы для ЭВМ с использованием машинного обучения в качестве программного обеспечения без привязки к конкретному типу динамографа.
Таким образом, указанные проблемы влекут за собой необходимость выхода на более высокий уровень оперативного контроля за фондом добывающих скважин с целью предотвращения преждевременного выхода из строя УШГН, снижению трудозатрат, связанных с привлечением квалифицированных технологов, при одновременном обеспечении стабилизации добычи в целом.
Из исследованного уровня техники заявителем выявлены программные обеспечения по диагностированию УШГН.
Программное обеспечение «Динамограф» (далее ПО «Динамограф»)[http://www.grant-ufa.ru/support/software.php].
Предназначено для считывания, обработки и хранения данных по изменению усилия на штоке во времени, полученных как в виде отдельных файлов, формируемых системой телемеханики, так и переписанных из памяти МСИ-07.
Программное обеспечение «Динамограф» поставляется в составе стационарной системы динамометрирования ДДС-04 (динамографа).
Программное обеспечение «Динамограф» позволяет диагностировать состояние глубинного оборудования, анализировать режим работы скважины, рассчитывать по динамограммам дебит скважин.
Достоинством ПО «Динамограф» является, в том числе, анализ динамограмм с целью диагностики состояния насосного оборудования.
Недостатком же является то, что ПО «Динамограф» эксплуатируется только в составе стационарной системы динамометрирования ДДС-04 (динамографа), установленного стационарно на скважину.
Таким образом, известное программное обеспечение и ее эксплуатация на практике предполагает использование собственных аппаратных средств и несовместимость с приборами других производителей.
Комплекс "Автон"
https://www.auton.ru/issledovania/dinamometrirovanie-postroenie-dinamogramm].
Исследование проводится с целью контроля технического состояния нефтедобывающего оборудования - штанговых глубинных насосов (ШГН) и оценки дебита жидкости. Измерение может проводиться как в ручном, так и в автоматическом режиме. Во втором случае используется специальный датчик - автономный динамограф-регистратор, который регистрирует и сохраняет динамограммы по предварительно указанной временной схеме.
Работа выполняется при помощи комплексов "Автон ШГН" или "Автон Уровень ШГН", состоящих из интеллектуальных датчиков, блока регистрации и программного обеспечения "Автон-Навигатор".
Таким образом, известное программное обеспечение и ее эксплуатация на практике предполагает использование собственных аппаратных средств и несовместимость с приборами других производителей.
Таким образом, выявленные заявителем из исследованного уровня техники аппаратно-программные комплексы невозможно использовать с динамографами разного конструктивного исполнения и разных производителей, что снижает их эффективное использование при эксплуатации по назначению вследствие отсутствия по сравнению с заявленным техническим решением возможности решать более широкий круг задач.
Из исследованного уровня техники заявителем выявлено изобретение по патенту RU 2492357 «Способ диагностирования работы штанговой глубинно-насосной установки». Сущностью является способ диагностирования работы штанговой глубинно-насосной установки путем снятия динамограммы динамографом, замеряющим упругую поперечную деформацию полированного штока, построении профиля изменения абсолютных максимальной и минимальной нагрузок в точке подвески штанг при изменении длины подвески колонны штанг и определении значения амплитудных нагрузок по данным профиля. После чего производится сопоставление значения амплитудной нагрузки, полученной по динамограмме со значением, рассчитанным по профилю, при этом длина подвески колонны штанг, соответствующая данной амплитудной нагрузке на профиле, и будет соответствовать месту вероятного обрыва или отворота штанг.
Недостатком известного технического решения является необходимость непосредственного исследования на скважинах с уже определённой неисправностью УШГН, что требует индивидуального подхода для выявления типа неисправности технологом. Указанное снижает эффективность использования известного изобретения при использовании по назначению.
Из исследованного уровня техники заявителем выявлена группа изобретений по патенту РФ № 2685006 «Способ и устройство для определения производительности скважинных насосов». Сущностью является способ определения производительности скважинных насосов, включающий в себя: измерение количества жидкости, добываемой из скважины с помощью насосной установки в течение заданного периода времени; определение первых площадей первых динамограмм насоса в течение заданного периода времени; суммирование первых площадей; определение коэффициента пропорциональности утечки скважинного насоса в насосной установке на основании количества добываемой жидкости и суммированных первых площадей; определение вторых площадей вторых динамограмм насоса во время непрерывной работы насосной установки в течение второго заданного периода времени; и определение чистого количества текучей среды, добываемой в течение второго заданного периода времени, на основании коэффициента пропорциональности утечки и вторых площадей.
Недостатком известного изобретения является определение только объёма добываемой жидкости насосом, однако не определяется причина утечек жидкости в насосе, что снижает эффективность известного изобретения при использовании по назначению.
Из исследованного уровня техники заявителем выявлено изобретение по патенту RU 2510971 «Связь на месте в реальном времени через интернет с диспетчером скважины для постоянной оптимизации скважины». Сущностью является обеспечение удаленного пользователя (диспетчера) предупреждениями и сообщениями в реальном времени, генерируемыми непосредственно блоком со скважины, тем самым повышая удобство эксплуатации скважины. Устройство и способ для управления и слежения за скважиной включает в себя независимый сетевой серверный компьютер, объединенный с контроллером насоса, расположенным на каждой скважине. Контроллер скважины управляет на месте скважинным насосом, обрабатывает данные скважины и насоса, генерирует динамограммы и передает отчеты о добыче, рекомендации по улучшению добычи и статистику добычи удаленно диспетчеру по Интернету. Контроллер можно дистанционно запрашивать на выдачу отчетов о добыче, а также сам контроллер может инициировать предупреждения посредством электронной почты, текстовых сообщений или Интернет-сообщений.
Недостатком известного технического решения является отсутствие блока анализа исправности/неисправности УШГН по динамограмме, что снижает эффективность известного изобретения при использовании по назначению.
В силу того, что анализ исследованного уровня техники не позволил выявить аналог, являющийся наиболее близким по совокупности совпадающих признаков, формула изобретения составлена без ограничительной части.
Техническим результатом заявленного технического решения является разработка способа автоматического определения причины неполадки работы глубинно-насосного оборудования добывающей скважины на основе автоматического чтения и интерпретации динамограмм на основе машинного обучения, характеризующегося высокой эффективностью при использовании по назначению за счет:
1 - автоматической интерпретации динамограмм с определением трех наиболее вероятных типов неисправности УШГН;
2 - автоматизации процесса интерпретации потоковых динамограмм, входящих со скважин, оснащенных динамографами, передающими информацию по телеметрии;
3 - непрерывного обновления базы статистических динамограмм с точно определёнными неисправностями УШГН и повышение надежности определения неисправности за счет машинного обучения;
4 - исключения «человеческого» фактора ошибок интерпретации и несвоевременного принятия решения по предотвращению выхода из строя УШГН;
5 - увеличения производительности технологических служб;
6 - повышения межремонтного периода скважин и снижения эксплуатационных затрат;
7 - повышения эффективности разработки месторождения в целом.
Заявленный технический результат достигается с применением разработанной программы для ЭВМ - см. электронный сертификат на программу для ЭВМ рег. № 1-9584816921, зарегистрированную в США.
Сущностью заявленного технического решения является способ автоматического определения причины неполадки работы глубинно-насосного оборудования добывающей скважины на основе машинного обучения заключающийся в том, что скважину оснащают динамографами, передающими информацию в виде рабочих динамограмм по телеметрии, создают вновь или используют уже существующую базу с точно определённым типом неисправных динамограмм в заданном формате с возможностью непрерывного пополнения, далее программа для ЭВМ выполняет параметризацию координат динамограмм в единый формат, далее выполняется обучение программы для ЭВМ на данной выборке, далее в базу данных программы для ЭВМ загружают файл с рабочими динамограммами с дальнейшей параметризацией координат динамограмм в единый формат, далее программа для ЭВМ выполняет сравнение рабочих динамограмм с файлом обучения со скважин и выводит прогноз «Рабочая»/«Неполадка», вероятность рабочей и три наиболее вероятных типа неполадки установки штангового глубинного насоса с соответствующими вероятностями, далее технолог выбирает максимально достоверный тип неполадки установки штангового глубинного насоса и принимает оперативное решение по её устранению.
Заявленное техническое решение иллюстрируется Фиг.1 - Фиг.24 соответственно.
На Фиг. 1 - Фиг.12 представлены теоретические динамограммы по определению отказов:
Фиг. 1 - нормальная работа,
Фиг. 2 - влияние газа,
Фиг. 3 - превышение подачи насоса над притоком в скважину,
Фиг. 4 - низкая посадка плунжера,
Фиг. 5 - выход плунжера из цилиндра невставного насоса,
Фиг. 6 - удары плунжера о верхнюю ограничительную гайку вставного насоса,
Фиг. 7 - утечки в нагнетательной части,
Фиг. 8 - полный выход из строя нагнетательной части,
Фиг. 9 - полный выход из строя всасывающей части,
Фиг. 10 - полуфонтанный характер работы насоса,
Фиг. 11 - обрыв штанг,
Фиг. 12 - утечки во всасывающей части.
Пунктиром на Фиг.1 - Фиг.12 показаны линии теоретической динамограммы.
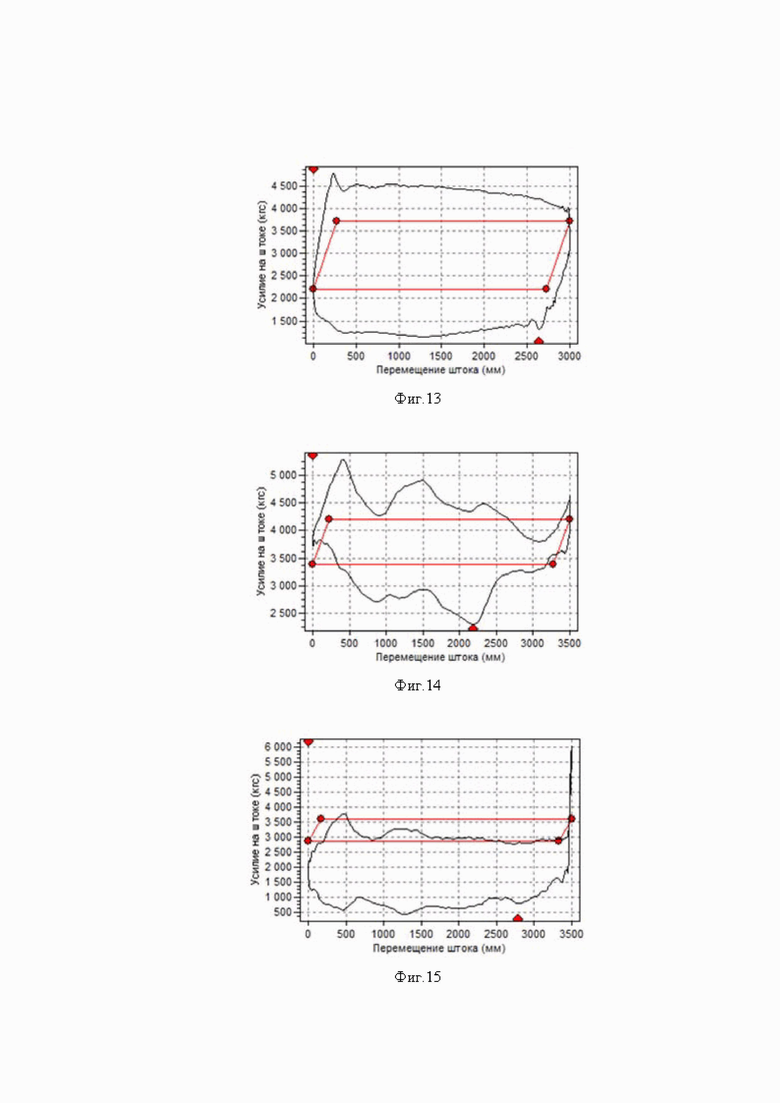
На Фиг. 13 представлен пример практической динамограммы с точно определённым типом неисправностей - влияние водонефтяной эмульсии.
На Фиг. 14 представлен пример практической динамограммы с точно определённым типом неисправностей - влияние растворенного в жидкости газа, откачка жидкости.
На Фиг. 15 представлен пример практической динамограммы с точно определённым типом неисправностей - высокая посадка плунжера.
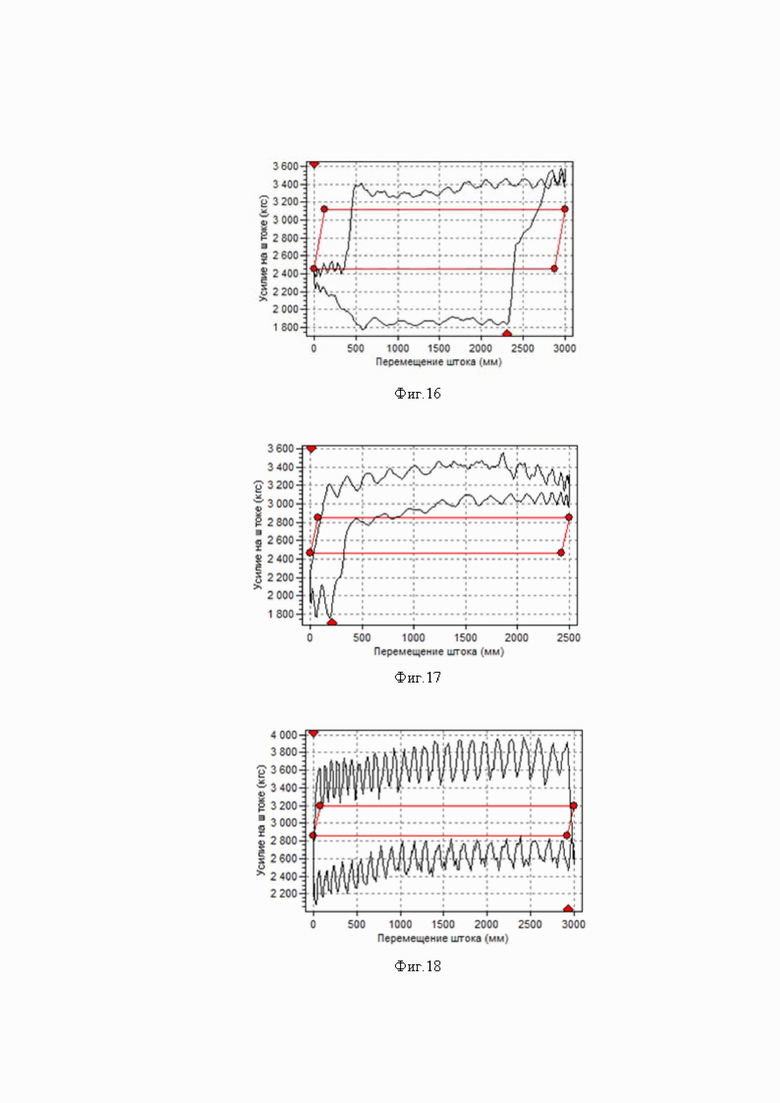
На Фиг. 16 представлен пример практической динамограммы с точно определённым типом неисправностей - запаздывание посадки нагнетательного клапана.
На Фиг. 17 представлен пример практической динамограммы с точно определённым типом неисправностей - засорение приема насоса
На Фиг. 18 представлен пример практической динамограммы с точно определённым типом неисправностей - неработоспособность клапанов насоса.
База как правило, должна содержать по каждому виду неисправностей минимум 30 характерных форм кривых.
На Фиг. 19 представлена таблица в формате *.xls, а именно обучающий файл. Название столбцов:
- name - название скважины,
- class - класс неполадки,
- date - дата измерения,
- data - оцифрованная динамограммы
На Фиг. 20 - Фиг.22 представлен пример параметризации исходных оцифрованных динамограммы (набор координат точек - «положение x нагрузка») в базисе меньшей размерности с целью перейти от координатных представлений к безразмерным величинам. Базис выбирается исходя из полноты описания формы кривой и минимальности размерности. К базису добавляются характеристики, которые свидетельствуют о тех или иных локальных особенностях кривой с характерными производными величинами, такими как размах по каждой из координат, величины кривизны в некоторых особых точках, момент достижения штока верхнего положения и другие:
Фиг. 20 - исходная форма динамограммы,
Фиг. 21 - параметризация, с целью перейти от координатных представлений к безразмерным величинам,
Фиг. 22 - параметризация с характерными производными величинами.
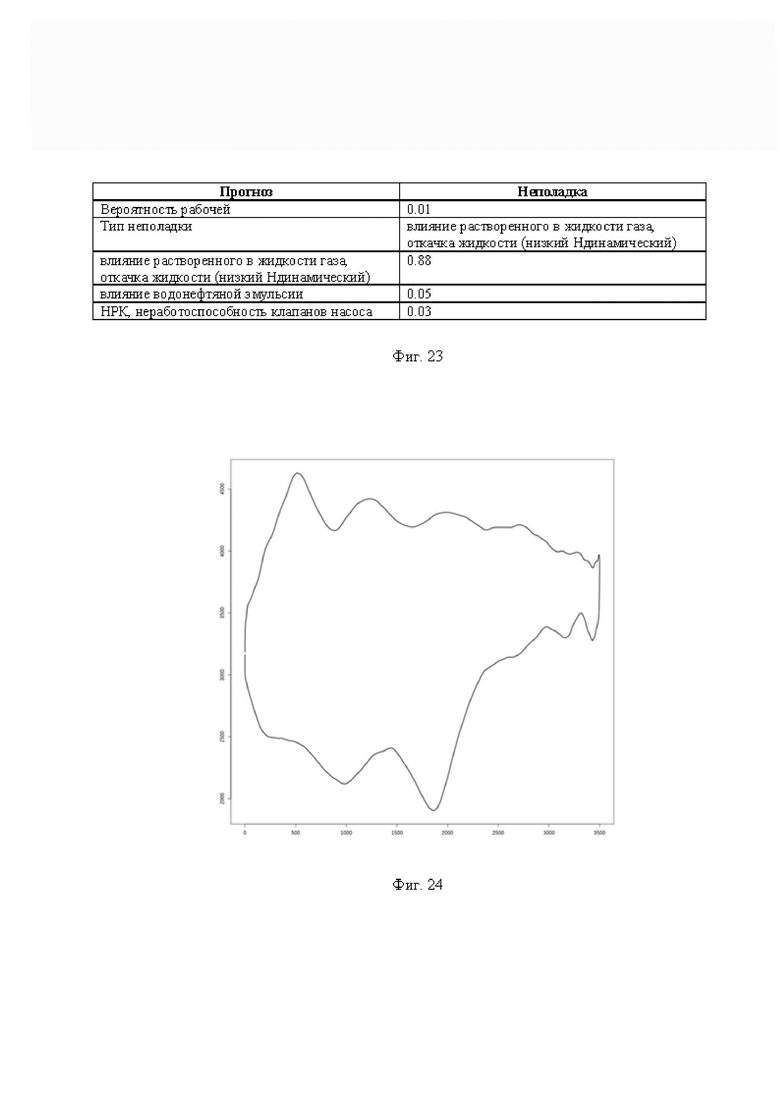
На Фиг. 23 представлен результат интерпретации в табличной форме.
В левом столбце описание прогнозных неполадок, в т.ч. вероятность, что динамограмма рабочая, а именно:
- вероятность рабочей динамограммы;
- наиболее вероятный тип неполадки (также выводится отдельной строкой) и далее два наиболее вероятных типа неполадки.
В правом столбце непосредственно представлены вероятности от 0 до 1.
На Фиг. 24 представлен вид интерпретируемой динамограммы.
Таким образом, по форме динамограммы технолог имеет возможность принять один из предлагаемых вариантов.
Также, технолог может направить данную динамограмму в обучающую базу данных, являющуюся неотъемлемой частью программы для ЭВМ.
Далее заявителем приведено описание заявленного технического решения.
Заявленный способ реализован на базе специально разработанной программы для ЭВМ рег. №1-9584816921 (США). Заявленный способ по заранее созданной и постоянно обновляемой базе статистических динамограмм, встроенной в указанную программу, по видам неисправности УШГН, на основе машинного обучения позволяет определять характер неисправности насоса, выявить отсутствие неполадок или максимально вероятную неисправность.
Назначением программы для ЭВМ является автоматическое определение причины неполадки работы насосного оборудования на основе автоматической интерпретации динамограмм. Используются следующие методики и алгоритмы, заложенные в программе для ЭВМ и используемые в изобретении:
1 - параметризация динамограмм по длине кривой;
2 - дальнейшая параметризация с помощью низкочастотного преобразования Фурье координат;
3 - обучение модели классификации с помощью линейной регрессии.
В качестве входных данных используют файл обучающей выборки с точно определённым типом неисправных динамограммами и файл тестируемых динамограмм (оцифрованные динамограммы - набор координат точек в координатах: положение x нагрузка).
В выходном файле содержится прогноз - вероятность рабочей динамограммы и наиболее вероятный тип неполадки и два следующих наиболее вероятных типа неполадки УШГН с соответствующими вероятностями и пояснения (см. Фиг. 23, 24).
Программа применяется с целью своевременного отслеживания работоспособности УШГН, контроля за объектами разработки, оперативного принятия решений при выявлении неисправности УШГН.
Особенностью программы для ЭВМ является возможность машинной обучаемости на основе выявления и дополнения базы данных уже имеющихся в программе статистических динамограмм новыми интерпретированными динамограммами неисправностей. Таким образом, смысл программы машинной обучаемости сводится к тому, что чем больше база данных, тем точнее результат.
Программа представляет собой исполняемый скрипт. Входные данные вводят с помощью файлов конфигурации. Программа позволяет выводить результаты расчетов в графической и в табличной форме.
Заявленный способ с использованием указанной программы для ЭВМ не требует специальных навыков для обучения технологов. Является простым и эффективным, работающим как в автоматическом, так и в ручном режиме интерпретации динамограмм. Положительным фактором является возможность использовать заявленный способ в процессе эксплуатации скважины для аварийных остановок по телеметрии при наличии таковой необходимости.
Далее заявителем приведен пример конкретной реализации заявленного технического решения.
Сущностью заявленного технического решения является разработка способа автоматического определения причины неполадки работы УШГН добывающей скважины на основе машинного обучения, характеризующийся тем, что интерпретация динамограмм ведется путем сравнения входных рабочих динамограмм с базой статистических динамограмм неисправностей УШГН в последовательности, заданной в программе для ЭВМ, позволяющий на основе постоянно обновляющейся базы статистических динамограмм обучаться и повышать способность максимально корректного определения неисправности УШГН.
Основной идеей, заложенной в заявленное техническое решение, является способ автоматического определения причины неполадки работы глубинно-насосного оборудования добывающей скважины на основе машинного обучения, заключающийся в том, что исходные оцифрованные динамограммы (набор координат точек - «положение x нагрузка») параметризуются в базисе меньшей размерности с целью перейти от координатных представлений к безразмерным величинам. Базис выбирается, исходя из полноты описания формы кривой и минимальности размерности. К базису добавляются характеристики, которые свидетельствуют о тех или иных локальных особенностях кривой.
В качестве входных данных используют файл обучающей выборки с точно определённым типом неисправных динамограммами и файл рабочих динамограмм.
Программа для ЭВМ обучается статистическим динамограммам с помощью линейной регрессии, далее путем сравнения обученной модели с рабочими динамограммами выдается прогноз - вероятность рабочей динамограммы, и наиболее вероятный тип неполадки, и два следующих наиболее вероятных типа неполадки с соответствующими вероятностями.
Обучение программы для ЭВМ выполняется как в автоматическом режиме после обновления базы статистическим динамограммам, либо в ручном режиме.
Заявленный способ реализуется по следующей последовательности действий (детальное описание).
При этом заявитель поясняет, что перед реализацией заявленного способа проводятся действия предварительного характера, зависящие от требований технолога «Заказчика» (п. 1).
1. Предварительные действия.
Технологическая служба нефтегазодобывающего предприятия подготавливает базу с точно определённым типом неисправных динамограммами в заданном формате (файл «train.xlsx»).
Также можно воспользоваться стандартной библиотекой статистических динамограмм, имеющейся в программе для ЭВМ. При этом технологи могут ее пополнять непрерывно для повышения способности программы для ЭВМ корректному определению неисправности УШГН.
Обучающий файл имеет структуру: name (название скважины), class (класс неполадки), date (дата измерения), data (оцифрованная динамограммы). Формат данных динамограмм: любое количество точек, перечисленных через «;»: Х1;Y1;Х2;Y2;Х3;Y3;…;Хn;Yn, где х - положение, Y -нагрузка.
2. Программа для ЭВМ выполняет параметризацию координат динамограмм. Каждая из координат раскладывается в базисе периодических функций. Коэффициенты разложения находятся, исходя из оптимальной аппроксимации оригинальных точек данной параметрической кривой. Итоговые коэффициенты разложения и есть характеризующие величины динамограммы. Кроме коэффициентов разложения, в число характерных величин добавляются некоторые производные величины, такие как размах по каждой из координат, величины кривизны в некоторых особых точках, момент достижения штока верхнего положения и другие
3. Далее выполняется обучение программы для ЭВМ, результаты обучения сохраняются в специальном файле. Файл config содержит заранее определённые названия неполадок и ряд действий с ними. Переобучение программы для ЭВМ технологом производят ручным способом. В случае отсутствия указания на обучение, последнее не производят.
При переобучении считываются данные из файла train.xlsx, обучается программа для ЭВМ, и параметры сохраняются в файле Model.
4. На вход программы для ЭВМ поступает файл с рабочими динамограммами test.xlsx с полями: name (название скважины), date (дата измерения), data (оцифрованная динамограммы). Программа для ЭВМ соответственно выполняет параметризацию координат динамограмм.
5. Программа для ЭВМ выполняет сравнение рабочих динамограмм с файлом обучения. Результаты сохраняются в выходном файле. Также результаты можно использовать, как указание выдать предупреждающий сигнал на монитор либо другое периферийное устройство технолога.
6. В выходном файле содержатся: прогноз «Рабочая»/«Неполадка»; вероятность рабочей; наиболее вероятный тип неполадки и три наиболее вероятных типа неполадки с соответствующими вероятностями.
Пример конкретного выполнения заявленного способа автоматического определения причины неполадки работы УШГН добывающей скважины на основе машинного обучения.
Объектом исследования является одно из нефтяных месторождений Республики Татарстан.
Заявленный способ осуществляли в нефтегазодобывающем предприятии следующим образом (с описанием выполнения предварительных действий), при этом способ описан с привязкой к фигурам для максимально подробного разъяснения в целом идеи способа.
1. Проводят предварительные действия, для чего производят выборку и создают базу данных с определённым типом неисправных динамограммам (файл «train.xlsx»).
Специалистами технологической службы нефтегазодобывающего предприятия на первом этапе создается база фактически замеренных и точно диагностированных динамограмм, охватывающая все возможные типы неисправностей УШГН. База должна содержать по каждому виду неисправностей минимум 30 характерных форм кривых.
Наиболее часто встречающиеся в промысловой практике динамограммы, характеризующие те или иные неисправности УШГН, представлены на Фиг.1- Фиг.12.
Также имеется возможность использовать стандартную библиотеку статистических динамограмм. Примеры статистических неисправных динамограмм УШГН, находящиеся в базе программы для ЭВМ, представлены на Фиг.13 - Фиг.18.
На основе набора характерных неисправных типов динамограмм создают обучающий файл «train.xlsx»: name (название скважины), class (класс неполадки), date (дата измерения), data (оцифрованная динамограммы) (Фиг 19).
2. Параметризация координат динамограмм.
Оцифрованные динамограммы параметризуются программой для ЭВМ с целью перейти от координатных представлений к безразмерным величинам (Фиг. 20 - Фиг.22).
3. Производится машинное обучение программы для ЭВМ.
Созданный файл config содержит заранее определённые названия неполадок УШГН и ряд действий с ними. Таким образом, программа для ЭВМ обучается на статистических динамограммах.
4. На вход программы для ЭВМ поступает файл с рабочими динамограммами «test.xlsx» и полями: name (название скважины), date (дата измерения), data (оцифрованная динамограммы), которые необходимо интерпретировать. Программа для ЭВМ после чтения этого файла также выполняет параметризацию координат динамограмм целью перейти от координатных представлений к безразмерным величинам (Фиг. 20 - Фиг.22) и производит сравнение обученной модели с рабочими динамограммами.
Программа для ЭВМ сверяет входную рабочую динамограмму со всеми статистическими динамограммами и определяет наиболее близкие типы неисправностей по соответствующим признакам. Программа для ЭВМ определяет наиболее вероятно близкие неисправности.
6. Выходная форма.
Программа для ЭВМ выдает следующий результат (Фиг. 23 - Фиг. 24): для корректного принятия решения технологу предлагается вероятность исправности УШГН и три варианта неисправности УШГН с вероятностью от 0 до 1. Причем сначала выдается неисправность с максимальной вероятностью, далее с меньшей вероятностью и так далее. Технологу остается только отметить нужную позицию.
В качестве эксперимента было выполнено порядка 500 автоматических интерпретаций динамограмм. Программа для ЭВМ обработала их за 25 минут. Предварительно технолог проверил корректность определения на 50 скважинах, далее, убедившись в высокой точности интерпретации, доверил для ЭВМ определить неисправность самостоятельно. На весь эксперимент было затрачено порядка 3 часов. Точность результата составила 95 %.
При этом технологу на интерпретацию 500 динамограмм без использования заявленного способа потребовалось бы около четырех рабочих дней. Таким образом, проведенный эксперимент подтвердил высокую эффективность заявленного способа, что позволило сэкономить только в этом эксперименте порядка 28 часов рабочего времени технолога.
Таким образом, заявителем разработан способ автоматического определения причины неполадки работы глубинно-насосного оборудования добывающей скважины на основе автоматического чтения и интерпретации динамограмм на основе машинного обучения, характеризующегося высокой эффективностью при использовании по назначению за счет:
1 - автоматической интерпретации динамограмм с определением трех наиболее вероятных типов неисправности УШГН;
2 - автоматизации процесса интерпретации потоковых динамограмм, входящих со скважин, оснащенных динамографами, передающими информацию по телеметрии;
3 - непрерывного обновления базы статистических динамограмм с точно определёнными неисправностями УШГН и повышение надежности определения неисправности за счет машинного обучения;
4 - исключения «человеческого» фактора ошибок интерпретации и несвоевременного принятия решения по предотвращению выхода из строя УШГН;
5 - увеличения производительности технологических служб;
6 - повышения межремонтного периода скважин и снижения эксплуатационных затрат;
7 - повышения эффективности разработки месторождения в целом.
При этом программа для ЭВМ не требует специальных навыков для обучения технологов. Является простой и эффективной, как в автоматическом, так и в ручном режиме интерпретации динамограмм.
Положительным фактором является возможность использовать заявленный способ в процессе эксплуатации скважины для аварийных остановок по телеметрии во избежание выхода из строя УШГН.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИРОВАНИЯ РАБОТЫ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКИ | 2012 |
|
RU2492357C1 |
| АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ОБУЧЕНИЯ ПЕРСОНАЛА ПО ЭКСПЛУАТАЦИИ НЕФТЕПРОМЫСЛОВОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2611275C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕБИТА НЕФТЯНОЙ СКВАЖИНЫ | 2008 |
|
RU2372480C1 |
| Способ эксплуатации скважины, оборудованной скважинной штанговой насосной установкой, в условиях, осложненных снижением динамического уровня | 2022 |
|
RU2790157C1 |
| Способ эксплуатации добывающей высоковязкую нефть скважины | 2016 |
|
RU2626484C1 |
| Способ очистки скважинной штанговой насосной установки от асфальтеносмолопарафиновых отложений при подвисании колонны насосных штанг | 2022 |
|
RU2780058C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМОМЕТРИРОВАНИЯ ШТАНГОВЫХ ГЛУБИННЫХ НАСОСОВ (ВАРИАНТЫ) | 2000 |
|
RU2176032C1 |
| Способ оптимизации параметров привода скважинной штанговой насосной установки | 2022 |
|
RU2773591C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДОБЫВАЮЩЕЙ ВЫСОКОВЯЗКУЮ НЕФТЬ СКВАЖИНЫ | 2015 |
|
RU2597304C1 |
| СПОСОБ РАЗРАБОТКИ НЕФТЯНОЙ ЗАЛЕЖИ С ПОМОЩЬЮ ПЕРИОДИЧЕСКОЙ ЭКСПЛУАТАЦИИ ДОБЫВАЮЩИХ СКВАЖИН, ПЕРИОД РАБОТЫ КОТОРЫХ ИЗМЕНЯЮТ В ЗАВИСИМОСТИ ОТ ИЗМЕНЕНИЯ ПЛОТНОСТИ СКВАЖИННОЙ ЖИДКОСТИ | 2010 |
|
RU2433250C1 |



Изобретение относится к области разработки нефтяных месторождений, а именно к способу автоматического определения причины неполадки работы глубинно-насосного оборудования добывающей скважины на основе машинного обучения. Способ заключается в том, что скважину оснащают динамографами, передающими информацию в виде рабочих динамограмм по телеметрии. Создают вновь или используют уже существующую базу с точно определённым типом неисправных динамограмм в заданном формате с возможностью непрерывного пополнения. Программа для ЭВМ выполняет параметризацию координат динамограмм в единый формат. Выполняется обучение программы на данной выборке. В базу данных программы загружают файл с рабочими динамограммами с дальнейшей параметризацией координат динамограмм в единый формат. Программа выполняет сравнение рабочих динамограмм с файлом обучения со скважин и выводит прогноз «Рабочая»/«Неполадка», вероятность рабочей и три наиболее вероятных типа неполадки установки штангового глубинного насоса с соответствующими вероятностями. Технолог выбирает максимально достоверный тип неполадки и принимает оперативное решение по её устранению. Изобретение направлено на обеспечение высокой эффективности при использовании по назначению. 24 ил.
Способ автоматического определения причины неполадки работы глубинно-насосного оборудования добывающей скважины на основе машинного обучения, заключающийся в том, что скважину оснащают динамографами, передающими информацию в виде рабочих динамограмм по телеметрии, создают вновь или используют уже существующую базу с точно определённым типом неисправных динамограмм в заданном формате с возможностью непрерывного пополнения, далее программа для ЭВМ выполняет параметризацию координат динамограмм в единый формат, далее выполняется обучение программы для ЭВМ на данной выборке, далее в базу данных программы для ЭВМ загружают файл с рабочими динамограммами с дальнейшей параметризацией координат динамограмм в единый формат, далее программа для ЭВМ выполняет сравнение рабочих динамограмм с файлом обучения со скважин и выводит прогноз «Рабочая»/«Неполадка», вероятность рабочей и три наиболее вероятных типа неполадки установки штангового глубинного насоса с соответствующими вероятностями, далее технолог выбирает максимально достоверный тип неполадки установки штангового глубинного насоса и принимает оперативное решение по её устранению.
| СВЯЗЬ НА МЕСТЕ В РЕАЛЬНОМ ВРЕМЕНИ ЧЕРЕЗ ИНТЕРНЕТ С ДИСПЕТЧЕРОМ СКВАЖИНЫ ДЛЯ ПОСТОЯННОЙ ОПТИМИЗАЦИИ СКВАЖИНЫ | 2008 |
|
RU2510971C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ СКВАЖИННЫХ НАСОСОВ | 2015 |
|
RU2685006C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ РАБОТЫ ШТАНГОВОЙ ГЛУБИННО-НАСОСНОЙ УСТАНОВКИ | 2012 |
|
RU2492357C1 |
| Ветряной двигатель со складными перьями или лопастями | 1929 |
|
SU12947A1 |
| US 5589633 A, 31.12.1996 | |||
| US 5252031 A, 12.10.1993. | |||

