ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Данное изобретение относится к области бортовых сенсорных систем.
2. Раскрытие предшествующего уровня техники
[0002] Например, система для обновления базы данных, используемая для идентификации и определения радиолокационным устройством типов объектов на основе информации о результате идентификации типа объекта бортовой камерой и информации о результате идентификации типа объекта радиолокационным устройством, предложена в качестве бортовой сенсорной системы (см. нерассмотренную японскую патентную заявку № 2017-207348 (JP 2017-207348 A)). Другие связанные методики содержат нерассмотренную японскую патентную заявку № H10-246778 (JP H10-246778 A). В заявке JP H10-246778 A раскрыты способы определения отслеживаемой цели на основе результата обнаружения, полученного посредством поискового луча, и излучения луча сопровождения в направлении отслеживаемой цели.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Например, для реализации более совершенного автономного вождения от датчиков требуются точные (другими словами, безошибочные) результаты наблюдения за обстановкой вокруг транспортного средства. Чем выше требуемая точность, тем больше время, необходимое датчикам для наблюдения за обстановкой вокруг транспортного средства. Кроме того, время, потраченное на одно наблюдение, ограничено для движущихся транспортных средств. Например, в случае, когда радиолокационное устройство, согласно способу, раскрытому в заявке JP 2017-207348 A, обладает большей точностью (т. е. большим угловым разрешением), радиолокационное устройство может быть непригодным для практического использования, так как значительно увеличивается время одного наблюдения.
[0004] Данное изобретение предлагает бортовую сенсорную систему, способную обеспечивать точные результаты наблюдения, уменьшая при этом временя наблюдения.
[0005] Первый аспект изобретения представляет собой бортовую сенсорную систему. Бортовая сенсорная система является бортовой сенсорной системой, содержащей первый датчик, сконфигурированный для определения обстановки вокруг транспортного средства, и второй датчик, обладающий более высоким угловым разрешением, чем первый датчик. Бортовая сенсорная система содержит: блок сбора данных, сконфигурированный для получения результата обнаружения от первого датчика; и блок определения диапазона, сконфигурированный так, чтобы на основе результата обнаружения определять диапазон наблюдения для выполнения наблюдения вторым датчиком.
[0006] Согласно первому аспекту, наблюдения в диапазоне наблюдения второго датчика осуществляются с относительно высокой точностью, и для оставшегося диапазона может быть использован результат обнаружения от первого датчика. В бортовой сенсорной системе точные результаты наблюдения могут быть получены с уменьшением времени наблюдения.
[0007] Бортовая сенсорная система согласно первому аспекту может дополнительно содержать блок определения уровня приоритета, сконфигурированный для того, чтобы на основе информации о препятствии определять уровни приоритета обнаружения препятствий исходя из, по меньшей мере, одного показателя из следующих показателей: взаимного положения каждого препятствия и транспортного средства, взаимного движения каждого препятствия и транспортного средства и типа каждого препятствия. Блок сбора данных может быть сконфигурирован для сбора информации о препятствии, являющимся результатом обнаружения, при этом информация о препятствии является информацией о препятствиях, существующих вокруг транспортного средства. Блок определения диапазона может быть сконфигурирован для определения диапазона наблюдения так, что препятствия с высоким уровнем приоритета обнаружения предпочтительнее включаются в диапазон наблюдения по сравнению с препятствиями с низким уровнем приоритета обнаружения.
[0008] В первом аспекте блок определения уровня приоритета может быть сконфигурирован для того, чтобы в ситуации, когда препятствия включают первый неподвижный объект, расположенный выше транспортного средства, и второй неподвижный объект, расположенный на поверхности дороги, по которой движется транспортное средство, назначать более высокий уровень приоритета обнаружения для второго неподвижного объекта, чем для первого неподвижного объекта, исходя из взаимного положения первого неподвижного объекта и транспортного средства и взаимного положения второго неподвижного объекта и транспортного средства.
[0009] В первом аспекте блок определения уровня приоритета может быть сконфигурирован для назначения более высокого уровня приоритета обнаружения для пешехода в случае, если препятствия включают пешехода, в ситуации, когда блок определения уровня приоритета предполагает, что пешеход будет находиться по курсу транспортного средства, исходя из взаимного движения пешехода и транспортного средства, чем в ситуации, когда блок определения уровня приоритета не предполагает, что пешеход будет находиться по курсу транспортного средства.
[0010] В первом аспекте первый датчик может быть радарным датчиком. Блок сбора данных может быть сконфигурирован для сбора информации о цели в качестве информации о препятствии; при этом информация о цели является информацией о множестве целей, каждая из которых состоит из множества отражающих точек. Блок определения уровня приоритета может быть сконфигурирован для того, чтобы в случае, когда цели содержат конкретную цель, назначать более высокий уровень приоритета обнаружения для конкретной цели, чем, по меньшей мере, для части целей, отличных от конкретной цели; при этом конкретная цель является целью, соответствующей движущемуся объекту, скорость конкретной цели равна или меньше заранее заданной скорости, и эффективная отражающая площадь конкретной цели равна или меньше заранее заданной эффективной отражающей площади цели.
[0011] В первом аспекте, когда транспортное средство остановлено, по меньшей мере, часть доступного для наблюдения диапазона второго датчика может отличаться от диапазона обнаружения первого датчика. Блок определения диапазона может быть сконфигурирован для определения диапазона наблюдения таким образом, что препятствия с высоким уровнем приоритета обнаружения включаются в диапазон наблюдения, в случае, если в первый момент времени препятствия высокого уровня приоритета обнаружения расположены вне доступного для наблюдения диапазона наблюдения, и во второй момент времени, который позже, чем первый момент времени, препятствия высокого уровня приоритета обнаружения находятся в доступном для наблюдения диапазоне.
[0012] В первом аспекте блок определения уровня приоритета может быть сконфигурирован для определения уровней приоритета обнаружения препятствий путем дополнительного использования картографической информации, соответствующей области, включающей, по меньшей мере, часть препятствий.
[0013] В первом аспекте блок сбора данных может быть сконфигурирован для сбора информации о полосе движения в качестве результата обнаружения, при этом информация о полосе движения является информацией о полосе движения перед транспортным средством. Блок определения диапазона может быть сконфигурирован для того, чтобы при обнаружении в информации о полосе движения того, что перед транспортным средством находится правоповоротная полоса движения и что транспортное средство вошло на правоповоротную полосу движения, определять диапазон наблюдения таким образом, чтобы область, которую пересекает транспортное средство, поворачивающее направо, была включена в диапазон наблюдения.
[0014] В первом аспекте блок сбора данных может быть сконфигурирован для сбора информации о дорожной обстановке в качестве результата обнаружения, при этом информация о дорожной обстановке является информацией о дорожной обстановке перед транспортным средством. Блок определения диапазона может быть сконфигурирован для того, чтобы при обнаружении из информации о дорожной обстановке уменьшения количества полос движения перед транспортным средством, определять диапазон наблюдения таким образом, чтобы в диапазон наблюдения была включена точка слияния полос движения, при этом точка слияния полос движения является точкой, в которой количество полос перед транспортным средством уменьшается.
[0015] В первом аспекте блок сбора данных может быть сконфигурирован для сбора информации о знаках в качестве результата обнаружения, при этом информация о знаках является информацией, по меньшей мере, об одном из дорожных знаков и дорожной разметки, существующих вокруг транспортного средства, и блок определения диапазона может быть сконфигурирован для определения диапазона наблюдения на основе информации о знаках.
[0016] В первом аспекте бортовая сенсорная система может дополнительно содержать блок управления, сконфигурированный для управления направлением излучения остронаправленного луча. Второй датчик может быть датчиком, сконфигурированным для излучения остронаправленного луча. Блок сбора данных может быть сконфигурирован для сбора информации о форме в качестве результата обнаружения, при этом информация о форме является информацией о форме препятствий, существующих вокруг транспортного средства. Блок определения диапазона может быть сконфигурирован для определения диапазона наблюдения на основе информации о форме. Блок управления может быть сконфигурирован для управления направлением излучения луча на основе информации о форме таким образом, что остронаправленный луч сканируется вдоль внешнего контура препятствий.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] Отличительные признаки, преимущества, техническая и промышленная значимость иллюстративных вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопровождающие чертежи, на которых одинаковые ссылочные позиции относятся к одинаковым элементам, причем:
На ФИГ. 1 изображена схема, иллюстрирующая пример конфигурации сенсорной системы согласно варианту осуществления изобретения;
На ФИГ. 2 показан пример полей обзора датчиков приблизительных измерений согласно варианту осуществления изобретения;
На ФИГ. 3 показан пример полей обзора датчиков точных измерений согласно варианту осуществления изобретения;
На ФИГ. 4 изображена блок-схема работы сенсорной системы согласно варианту осуществления изобретения;
На ФИГ. 5 изображена схема, иллюстрирующая другой пример конфигурации сенсорной системы согласно варианту осуществления изобретения;
На ФИГ. 6 показан пример диапазонов наблюдения датчиков приблизительных измерений согласно варианту осуществления изобретения;
На ФИГ. 7 показан пример дороги, по которой движется транспортное средство 1;
На ФИГ. 8 представлена концептуальная схема, демонстрирующая концепцию результатов наблюдения датчиков приблизительных измерений согласно варианту осуществления изобретения;
На ФИГ. 9 представлена блок-схема определения уровня угрозы согласно варианту осуществления изобретения;
На ФИГ. 10 показан пример таблицы, определяющей взаимосвязь между уровнем угрозы, расстоянием и приоритетом наблюдения;
На ФИГ. 11 представлена блок-схема генерирования плана наблюдения согласно варианту осуществления изобретения;
На ФИГ. 12A показан пример схемы сканирования;
На ФИГ. 12B показан пример схемы сканирования; и
На ФИГ. 13 представлена блок-схема изменения порядка наблюдения согласно варианту осуществления изобретения.
ПОДРОБНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0018] Далее будет раскрыт вариант осуществления бортовой сенсорной системы. Бортовая сенсорная система, согласно варианту осуществления изобретения, содержит первый датчик, определяющий обстановку вокруг транспортного средства, и второй датчик, имеющий большее угловое разрешение, чем первый датчик. Второй датчик может быть того же типа, что и первый датчик, или другого типа при условии, что угловое разрешение второго датчика больше углового разрешения первого датчика. Количество первых датчиков не ограничено одним и может составлять два или более. Количество вторых датчиков также не ограничено одним и может составлять два или более.
[0019] Разрешение датчика может быть рассчитано по количеству точек наблюдения на единицу площади (т.е. плотности наблюдения). Чем больше количество точек наблюдения на единицу площади (другими словами, чем больше плотность наблюдения), тем выше разрешение. С другой стороны, конкретное разрешение представлено минимальным расстоянием или углом, которые могут различаться датчиком. Чем меньше минимальное различимое расстояние или угол, тем выше разрешение (т.е. способность различения объектов). Т.е. чем меньше минимальное различимое расстояние или угол, тем выше плотность наблюдения. «Угловое разрешение» — это показатель, представляющий разрешение минимальным различимым углом. Выражение «более высокое угловое разрешение, чем угловое разрешение первого датчика» означает «способен различать углы меньше минимального угла, который может различить первый датчик».
[0020] Например, для датчика (например, камеры и т.д.), имеющего блок обнаружения с множеством элементов обнаружения, расположенных в двух измерениях, и наблюдающего за диапазоном поля обзора блока обнаружения единовременно, разрешение соответствует плотности наблюдения. В этом случае угол обзора (т.е. мгновенное поле обзора) одного элемента обнаружения является конкретным примером «углового разрешения».
[0021] Например, для датчика, излучающего волны наблюдения (световые, радиоволны и т.д.) и наблюдающего за отраженными волнами для излучаемых волн наблюдения (например, лазерный локатор (LiDAR), радар и т.д.), количество излучаемых лазерных лучей или лучей на единицу площади соответствует плотности наблюдения. Например, в случае лазерного локатора «угловое разрешение» приблизительно вычисляется по формуле «d⋅2tan-1(1/2x)» (данная величина соответствует углу на этапе сканирования), в которой x — это расстояние до одной поверхности, а d — это расстояние между лазерными пятнами на одной поверхности. Например, в случае радара ширина луча, представленная углом, является конкретным примером «углового разрешения».
[0022] «Обстановка вокруг транспортного средства» означает условия вокруг транспортного средства в определенный момент времени. «Обстановка вокруг транспортного средства» включает, например, объекты, расположенные вокруг транспортного средства, форму и структуру дороги, по которой перемещается транспортное средство, и информацию о поверхности дороги, по которой перемещается транспортное средство. «Обстановка вокруг транспортного средства» может дополнительно содержать информацию о погоде, например, о дожде или снегопаде.
[0023] «Объекты, расположенные вокруг транспортного средства» могут включать, например, установленные объекты, закрепленные на земле, такие как ограждения, столбы и бордюры, неподвижные объекты, такие как припаркованные транспортные средства и дорожные конусы, и движущиеся объекты, такие как транспортные средства и пешеходы в движении. Установленные объекты, неподвижные и движущиеся объекты далее, по необходимости, обозначены как «препятствия». Первый датчик или второй датчик может идентифицировать объекты на основе, например, их характеристик (например, отражательной способности, цвета и т.д.) - т.е. на основе категорий, отличающихся от вышеуказанных. Например, для дорожных знаков сам дорожный знак и стойка дорожного знака, поддерживающая знак, могут быть идентифицированы как отдельные объекты.
[0024] «Форма и структура дороги» могут включать, например, количество полос, ширину полосы, ширину дороги, кривизну, правоповоротную полосу, участок слияния, объездной участок и перекресток. «Информация о поверхности дороги» может содержать, например, информацию о дорожной разметке на поверхности дороги и информацию о неровности дорожной поверхности.
[0025] Бортовая сенсорная система содержит блок сбора данных и блок определения диапазона. Блок сбора данных получает результат обнаружения от первого датчика. В случае, когда первый датчик является камерой, результатом обнаружения может быть изображение, снятое камерой. В случае, когда первый датчик является лазерным локатором или радаром, результатом обнаружения могут быть данные, содержащие, например, расстояние от первого датчика до отражающей точки и интенсивность отражения.
[0026] Блок определения диапазона определяет диапазон наблюдения второго датчика за пределами области вокруг транспортного средства на основе результата обнаружения, полученного блоком сбора данных. В контексте настоящего документа «диапазон наблюдения» является диапазоном, за которым фактически наблюдает второй датчик и который уже, чем доступный для наблюдения диапазон второго датчика. Доступный для наблюдения диапазон второго датчика является максимальным диапазоном, за которым может наблюдать второй датчик в соответствии со своими возможностями. В случае, когда второй датчик является, например, камерой, содержащей функцию увеличения, «доступный для наблюдения диапазон» соответствует углу обзора при наименьшем фокусном расстоянии. В случае, когда второй датчик является сканирующим лазерным локатором или радаром, «доступный для наблюдения диапазон» соответствует, например, углу обзора, показанному в каталоге продукции, брошюре и т.д.
[0027] Выражение «на основе результата обнаружения» не ограничивается только самим результатом обнаружения (так называемыми исходными данными), но является концепцией, также содержащей, например, обработанные данные результата обнаружения, данные, полученные в результате обработки (например, аналитической обработки) результата обнаружения и т.д.
[0028] Когда информация о препятствии, расположенном вокруг транспортного средства, поступает на основе результата обнаружения, блок определения диапазона может определять диапазон наблюдения таким образом, что, например, область вокруг препятствия включена в диапазон наблюдения. В этом случае блок определения диапазона может определять диапазон наблюдения таким образом, что, например, никакая другая область, кроме области вокруг препятствия, не включена в диапазон наблюдения. Альтернативно, когда информация о множестве препятствий, расположенных вокруг транспортного средства, поступает на основе результата обнаружения, блок определения диапазона может определять диапазон наблюдения таким образом, что, например, препятствие, соответствующее движущемуся объекту, предпочтительно включено в диапазон наблюдения. Альтернативно, когда на основе результата обнаружения подтверждено, что впереди транспортного средства присутствует перекресток, блок определения диапазона может определять диапазон наблюдения таким образом, что область вокруг перекрестка включена в диапазон наблюдения. В этом случае блок определения диапазона может определять диапазон наблюдения таким образом, что, например, никакая другая область, кроме области вокруг перекрестка, не включена в диапазон наблюдения.
[0029] Например, для достижения более совершенного автономного вождения от бортового датчика требуется точный результат наблюдения за обстановкой вокруг транспортного средства. Например, радиолокационная станция с фазированной антенной решеткой предложена как датчик высокой точности, который выводит точный результат наблюдения. Однако, так как остронаправленный луч обладает относительно малой шириной, радиолокационная станция с фазированной антенной решеткой требует времени наблюдения, более длительного от нескольких раз до нескольких сотен раз, чем, например, радар, излучающий веерный луч. Соответственно, даже если на транспортное средство, перемещающееся по дороге, которая является сложной средой, установлен датчик высокой точности, например, радиолокационная станция с фазированной антенной решеткой, датчику будет недостаточно времени для наблюдения за изменениями окружающей среды вокруг транспортного средства (например, в момент получения результата наблюдения сам результат наблюдения может ничего не отображать в местоположении, обозначенном результатом наблюдения, так как транспортное средство переместилось или переместились другие транспортные средства и т.д. вокруг транспортного средства). Т.е., даже если на транспортное средство установлен датчик высокой точности, последнему сложно полностью реализовать свой технический потенциал.
[0030] Соответственно, бортовая сенсорная система определяет диапазон наблюдения второго датчика с относительным высоким угловым разрешением (соответствующим датчику высокой точности, описанному выше) на основе результата обнаружения от первого датчика с относительно низким угловым разрешением.
[0031] Так как угловое разрешение первого датчика относительно мало, осуществление процесса, относящегося к определению обстановки вокруг транспортного средства первым датчиком, занимает относительно короткое время. Кроме того, так как угловое разрешение первого датчика относительно мало, количество данных результата обнаружения от первого датчика относительно мало. Таким образом сокращается промежуток времени от определения обстановки вокруг транспортного средства первым датчиком до определения диапазона наблюдения второго датчика. Так как диапазон наблюдения второго датчика уже, чем доступный для наблюдения диапазон второго датчика (другими словами, диапазон, за которым должен наблюдать второй датчик, ограничен), время, необходимое второму датчику для наблюдения за диапазоном наблюдения меньше, чем время, необходимое второму датчику для наблюдения за всем доступным для наблюдения диапазоном.
[0032] Диапазон наблюдения второго датчика может быть определен таким образом, что в диапазон наблюдения включена точка, которую следует учитывать во время движения транспортного средства, например, препятствие или перекресток (другими словами, точка, которая может значительно повлиять на перемещение транспортного средства). При такой конфигурации может быть получен относительно точный результат наблюдения для точки, которую следует учитывать.
[0033] Т.е. бортовая сенсорная система осуществляет относительно точное наблюдение для диапазона наблюдения второго датчика и осуществляет относительно менее точное наблюдение для других диапазонов. Бортовая сенсорная система, таким образом, может получать точные результаты наблюдения с уменьшением времени наблюдения. Согласно раскрытому выше, в соответствии с бортовой сенсорной системой может быть реализована система, получающая относительно точный результат наблюдения для точки, которая может значительно повлиять на перемещение транспортного средства и получающая только относительно менее точный результат наблюдения для точки, не влияющей на перемещение транспортного средства или влияние которой маловероятно.
[0034] Сенсорная система 100, которая представляет собой конкретный пример бортовой сенсорной системы, согласно варианту осуществления изобретения, будет раскрыта со ссылкой на ФИГ. 1–4.
[0035] Как показано на ФИГ. 1, сенсорная система 100 установлена на транспортное средство 1 согласно примеру транспортного средства, раскрытому выше. Сенсорная система 100 содержит центральный блок 10 обработки и управления, датчик 20 приблизительных измерений и датчик 30 точных измерений. Несмотря на то, что на ФИГ. 1 показан один датчик 20 приблизительных измерений и один датчик 30 точных измерений, сенсорная система 100 может содержать множество датчиков 20 приблизительных измерений и множество датчиков 30 точных измерений.
[0036] Датчик 20 приблизительных измерений и датчик 30 точных измерений являются примером первого датчика и второго датчика, соответственно. Поэтому угловое разрешение датчика 30 точных измерений больше углового разрешения датчика 20 приблизительных измерений.
[0037] Положения датчиков 20 приблизительных измерений будут раскрыты со ссылкой на ФИГ. 2. На ФИГ. 2 веерообразные диапазоны обозначают поля обзора датчиков 20 приблизительных измерений. Например, датчики 20 приблизительных измерений могут быть расположены на передней поверхности спереди транспортного средства 1 и на передней правой, передней левой, задней правой и задней левой частях транспортного средства 1. Датчики 20 приблизительных измерений могут быть расположены таким образом, что поле обзора одного датчика 20 приблизительных измерений будет перекрывать, по меньшей мере, часть поля обзора другого датчика 20 приблизительных измерений.
[0038] Положения датчиков 30 точных измерений будут раскрыты со ссылкой на ФИГ. 3. На ФИГ. 3 веерообразные диапазоны обозначают поля обзора датчиков 30 точных измерений (соответствующие наблюдаемому диапазону второго датчика, раскрытого выше). Например, датчики 30 точных измерений могут быть расположены на крыше транспортного средства 1. Датчики 30 точных измерений могут быть расположены таким образом, что поле обзора одного датчика 30 точных измерений пересекает, по меньшей мере, часть поля обзора другого датчика 30 точных измерений.
[0039] Количество и положения датчиков 20 приблизительных измерений и количество и положения датчиков 30 точных измерений приведены только в качестве примеров и не ограничиваются раскрытым выше.
[0040] Центральный блок 10 обработки и управления содержит блок 11 обработки данных приблизительных измерений и блок 12 обработки данных точных измерений в качестве блоков обработки, логически реализованных внутри центрального блока 10 обработки и управления, или в качестве схем обработки, физически реализованных внутри центрального блока 10 обработки и управления. Блок 11 обработки данных приблизительных измерений осуществляет обработку данных, относящихся к датчику 20 приблизительных измерений. Блок 12 обработки данных точных измерений осуществляет обработку данных, относящихся к датчику 30 точных измерений.
[0041] Работа блока 11 обработки данных приблизительных измерений и блока 12 обработки данных точных измерений будет раскрыта со ссылкой на блок-схему на ФИГ. 4.
[0042] Как показано на ФИГ. 4, блок 11 обработки данных приблизительных измерений получает информацию о наблюдении (например, информацию о целях и т.д., соответствующую препятствиям вокруг транспортного средства 1) от датчика 20 приблизительных измерений (этап S1). Блок 11 обработки данных приблизительных измерений прогнозирует будущие местоположения или пути препятствий вокруг транспортного средства 1, исходя из информации о наблюдении (этап S2). Путь препятствия можно прогнозировать, если препятствие является движущимся объектом. Блок 11 обработки данных приблизительных измерений затем определяет уровни угрозы препятствий на основе результата обработки на этапе S2 и работы транспортного средства 1. Уровень угрозы может быть определен на основе, например, вероятности столкновения транспортного средства 1 и препятствия. Блок 11 обработки данных приблизительных измерений отправляет результат определения уровней угрозы на блок 12 обработки данных точных измерений.
[0043] Блок 12 обработки данных точных измерений определяет препятствия, за которыми будет осуществляться наблюдение датчиками 30 точных измерений, среди препятствий вокруг транспортного средства 1 на основе результата определения уровней угрозы, полученного от блока 11 обработки данных приблизительных измерений. Блок 12 обработки данных точных измерений назначает порядок наблюдения за препятствиями, выбранными для наблюдения, и диапазон наблюдения датчика 30 точных измерений (этап S4). Блок 12 обработки данных точных измерений управляет датчиком 30 точных измерений для наблюдения за препятствиями, подлежащими наблюдению датчиком 30 точных измерений согласно назначенному порядку наблюдения и назначенному диапазону наблюдения (этап S5).
[0044] Сенсорная система 110, являющаяся другим конкретным примером бортовой сенсорной системы, согласно варианту осуществления изобретения, будет раскрыта со ссылкой на ФИГ. 5–13. Сенсорная система 110 является сенсорной системой 100 с более практической конфигурацией. На фигурах те же части, что и для сенсорной системы 100, обозначены теми же знаками, и повторное описание будет опущено.
[0045] Как показано на ФИГ. 5, сенсорная система 110 установлена на транспортное средство 1. Сенсорная система 110 содержит центральный блок 10 обработки и управления (далее по необходимости обозначенный как «блок 10 управления»), множество датчиков 20 приблизительных измерений, множество датчиков 30 точных измерений и датчик 40 движения транспортного средства. Сенсорная система 110 соединена с устройством 60 управления транспортного средства 1 посредством интерфейсного устройства 50.
[0046] Несмотря на то, что на ФИГ. 5 показаны два датчика 20 приблизительных измерений, количество датчиков 20 приблизительных измерений не ограничено двумя (т.е. количество датчиков 20 приблизительных измерений может составлять три и более или один). Аналогично, количество датчиков 30 точных измерений не ограничено двумя.
[0047] Датчики 20 приблизительных измерений не ограничены датчиками одного типа и могут быть датчиками различных типов. Конкретные примеры датчика 20 приблизительных измерений включают камеру, радар, излучающий веерообразный луч, и импульсный лазерный локатор. Аналогично, датчики 30 точных измерений не ограничены датчиками одного типа и могут быть датчиками различных типов. Конкретные примеры датчика 30 точных измерений включают радиолокационную станцию с активной фазированной антенной решеткой, сканирующий лазерный локатор, частотно-модулированную радиолокационную станцию непрерывного излучения, частотно-модулированный лазерный локатор непрерывного излучения и камеру на шарнирной основе.
[0048] Датчик 20 приблизительных измерений содержит блок наблюдения, блок обнаружения и блок управления. Блок наблюдения получает информацию о наблюдении. Блок обнаружения обрабатывает исходные данные наблюдения (например, изображение, информацию об отраженной волне и т.д.), выведенные блоком наблюдения для идентификации, например, объекта, и преобразования объекта в облако точек или цель. Блок управления получает команды от блока 11 обработки данных приблизительных измерений, который будет раскрыт ниже, и назначает параметры наблюдения. Конфигурация датчика 20 приблизительных измерений представлена только в качестве примера и не ограничивается этим.
[0049] Датчик 30 точных измерений содержит блок наблюдения, блок сканирования, блок обнаружения и блок управления. Блок наблюдения получает информацию о наблюдении. Блок сканирования сканирует блок наблюдения. Блок обнаружения идентифицирует, например, объект, и преобразует объект в облако точек или цель. Блок управления получает команды от блока 12 обработки данных точных измерений, который будет раскрыт ниже, и назначает параметры наблюдения. Конфигурация датчика 30 точных измерений представлена только в качестве примера и не ограничивается этим.
[0050] Датчик 40 движения транспортного средства содержит множество датчиков, обнаруживающих информацию о движении транспортного средства 1. Датчик 40 движения транспортного средства содержит, например, датчик положения (такой как глобальная спутниковая навигационная система (GPS)), датчик ускорения, датчик угловой скорости и т.д.
[0051] Блок 10 управления содержит блок 11 обработки данных приблизительных измерений, блок 12 обработки данных точных измерений и блок 13 интеграции и восприятия данных наблюдения в качестве блоков обработки, логически реализованных внутри блока 10 управления, или в качестве схем обработки, физически реализованных внутри блока 10 управления.
Блок обработки данных приблизительных измерений
[0052] Блок 11 обработки данных приблизительных измерений содержит блок 111 интеграции данных обнаружения, блок 112 обнаружения движущегося объекта, блок 113 определения уровня угрозы, блок 114 управления информацией приблизительных измерений и блок 115 управления наблюдением датчика приблизительных измерений.
[0053] Блок 111 интеграции данных обнаружения интегрирует данные, полученные от каждого датчика 20 приблизительных измерений. В частности, для данных, полученных от каждого датчика 20 приблизительных измерений, блок 111 интеграции данных обнаружения, например, осуществляет синхронизацию времени интервалов наблюдения, корректирует углы установки и ошибки установки датчиков 20 приблизительных измерений и преобразует опорный кадр датчика для системы координат с центром в транспортном средстве 1. В это время блок 111 интеграции данных обнаружения может, по необходимости, корректировать искажения точек наблюдения.
[0054] Блок 111 интеграции данных обнаружения затем интегрирует данные всех датчиков 20 приблизительных измерений в общем координатном пространстве (т.е. в координатной системе с центром в транспортном средстве 1). В это время для области пересечения поля обзора одного датчика 20 приблизительных измерений и поля обзора другого датчика 20 приблизительных измерений блок 111 интеграции данных обнаружения определяет, соответствуют ли друг другу данные одного датчика 20 приблизительных измерений и другого датчика 20 приблизительных измерений, и интегрирует точки наблюдения для одного объекта (например, получает среднее значение для точек наблюдения, удаляет одну точку наблюдения и т.д.). Общее координатное пространство может быть системой координат с началом в точке, отличной от центра транспортного средства 1, например, инерциальной системой координат, вместо системы координат с центром в транспортном средстве 1.
[0055] Таким образом, блок 111 интеграции данных обнаружения генерирует интегрированные данные наблюдения для области вокруг транспортного средства 1 (например, областей, соответствующих заштрихованным частям на ФИГ. 6). Блок 111 интеграции данных обнаружения добавляет информацию о времени к интегрированным данным наблюдения и последовательно отправляет полученные интегрированные данные наблюдения блоку 112 обнаружения движущегося объекта и блоку 114 управления информацией приблизительных измерений. Способ интеграции данных, раскрытый выше, представлен только в качестве примера и не ограничивается этим. Т.е. к способу интеграции данных могут быть применены различные существующие аспекты.
[0056] Блок 112 обнаружения движущегося объекта обнаруживает движущийся объект из интегрированных данных наблюдения. В частности, блок 112 обнаружения движущегося объекта определяет состояние движения транспортного средства 1 на основе вывода датчика 40 движения транспортного средства, а затем обнаруживает движущийся объект за счет удаления элементов, являющихся результатом движения транспортного средства 1, из интегрированных данных наблюдения и обнаружения движения объектов. Способ обнаружения движущегося объекта может быть выбран надлежащим образом в соответствии с типом (типами) датчиков 20 приблизительных измерений. Так как к способу обнаружения движущегося объекта могут быть применены различные существующие аспекты, их подобное описание будет опущено.
[0057] Блок 112 обнаружения движущегося объекта определяет характеристики обнаруженного движущегося объекта. Примеры характеристик содержат скорость, ускорение, направление движения, относительное расстояние до транспортного средства 1, размер и специфическую информацию для датчиков приблизительных измерений (например, эффективная отражающая площадь, интенсивность отражения света, цвет и форма). Блок 112 обнаружения движущегося объекта также определяет объект, содержащийся в интегрированных данных наблюдения, но не обнаруженный как движущийся объект, как неподвижный объект. Блок 112 обнаружения движущегося объекта также определяет характеристики обнаруженного неподвижного объекта. Примеры характеристик содержат относительное расстояние до транспортного средства 1, размер и специфическую информацию для датчиков приблизительных измерений. Блок 112 обнаружения движущегося объекта отправляет результаты обнаружения для движущегося и неподвижного объекта на блок 113 определения уровня угрозы.
[0058] Здесь предполагается, что транспортное средство 1 движется по дороге, как показано на ФИГ. 7. Как показано на ФИГ. 7, пешеход 511 собирается пройти по пешеходному переходу перед транспортным средством 1. Пешеход 512 идет по дороге, по которой движется транспортное средство 1. Встречное транспортное средство 520 движется в сторону транспортного средства 1 по стороне дороги, противоположной стороне, по которой движется транспортное средство 1. Рядом с пешеходным переходом перед транспортным средством 1 установлен дорожный знак 532. Дорожный знак 532 обозначает наличие пешеходного перехода. По обеим сторонам дороги, по которой движется транспортное средство 1, посажены деревья. На ФИГ. 7 стрелками обозначены направления движущихся объектов (например, пешеходов и транспортного средства).
[0059] Так как угловое разрешение датчиков 20 приблизительных измерений относительно мало, наблюдение за такими объектами, как пешеход 511, осуществляется с относительно низкой точностью, как показано, например, круглыми областями на ФИГ. 8. Соответственно, если объекты расположены относительно близко друг к другу, они могут быть не идентифицированы как отдельные объекты. На ФИГ. 8 заштрихованные относительно темным цветом круглые или овальные области обозначают движущиеся объекты, а заштрихованные относительно светлым цветом круглые или овальные области обозначают неподвижные объекты.
[0060] Блок 113 определения уровня угрозы определяет уровни угрозы движущихся и неподвижных объектов, обнаруженных блоком 112 обнаружения движущегося объекта. Блок 113 определения уровня угрозы содержит блок 113a обработки движущегося объекта, определяющий уровень угрозы движущегося объекта, и блок 113b обработки неподвижного объекта, определяющий уровень угрозы неподвижного объекта.
[0061] Пример определения уровня угрозы блоком 113 определения уровня угрозы будет раскрыт со ссылкой на ФИГ. 9 и 10.
[0062] Как показано в блок-схеме, приведенной на ФИГ. 9, если блок 112 обнаружения движущегося объекта получает интегрированные данные наблюдения, сгенерированные блоком 111 интеграции данных обнаружения (этап S101), блок 112 обнаружения движущегося объекта осуществляет обнаружение движения, как описано выше (т.е. обнаруживает движение объектов) (этап S102). Блок 112 обнаружения движущегося объекта затем выводит результат обнаружения для движущегося объекта на блок 113a обработки движущегося объекта и выводит результат обнаружения для неподвижного объекта на блок 113b обработки неподвижного объекта.
[0063] Блок 113a обработки движущегося объекта прогнозирует, основываясь на характеристиках движущегося объекта, будущее местоположение и путь (т.е. путь, по которому движущийся объект перемещается из текущего местоположения в будущее местоположение) движущегося объекта (далее обозначенный как «целевой объект») (этап S103). Параллельно с этапом S103, до или после него блок 113a обработки движущегося объекта определяет состояние движения транспортного средства 1 (например, прогнозирует будущее местоположение транспортного средства 1) на основе вывода датчика 40 движения транспортного средства.
[0064] Блок 113a обработки движущегося объекта осуществляет распознавание столкновения между целевым объектом и транспортным средством 1 на основе будущего местоположения и пути целевого объекта и будущего местоположения транспортного средства 1 (и пути, по которому движется транспортное средство 1 из текущего местоположения в будущее местоположение) (этап S104). На этапе S104 блок 113a обработки движущегося объекта определяет, что (i) транспортное средство 1 столкнется с целевым объектом, (ii) транспортное средство 1 и целевой объект не столкнутся, но их траектории пересекаются, или (iii) транспортное средство 1 не столкнется с целевым объектом, и траектория транспортного средства 1 не пересечется с траекторией целевого объекта. Т.е. блок 113a обработки движущегося объекта осуществляет распознавание столкновения на основе взаимного положения и взаимного движения транспортного средства 1 и целевого объекта.
[0065] В примере на ФИГ. 7 блок 113a обработки движущегося объекта определяет для пешехода 511, что (i) транспортное средство 1 столкнется с целевым объектом или (ii) транспортное средство 1 и целевой объект не столкнутся, но их траектории пересекаются. Для пешехода 512 и встречного транспортного средства 520 блок 113a обработки движущегося объекта определяет, что (iii) транспортное средство 1 не столкнется с целевым объектом, и траектория транспортного средства 1 не пересечется с траекторией целевого объекта.
[0066] Если блок 113a обработки движущегося объекта определяет, что транспортное средство 1 столкнется с целевым объектом (этап S104: столкновение), блок 113a обработки движущегося объекта идентифицирует целевой объект как цель повышенной опасности (этап S105). Блок 113a обработки движущегося объекта также определяет, например, расстояние от транспортного средства 1 до целевого объекта, идентифицированного как цель повышенной опасности, на основе характеристик данного целевого объекта (этап S106). Блок 113a обработки движущегося объекта затем упорядочивает множество целевых объектов, идентифицированных как цели повышенной опасности, по возрастанию расстояния до транспортного средства 1 (этап S107).
[0067] Если блок 113a обработки движущегося объекта определяет, что траектории транспортного средства 1 и целевого объекта пересекаются (этап S104: пересечение траекторий), блок 113a обработки движущегося объекта идентифицирует целевой объект как цель средней опасности (этап S108). Блок 113a обработки движущегося объекта также определяет, например, расстояние от транспортного средства 1 до целевого объекта, идентифицированного как цель средней опасности, на основе характеристик данного целевого объекта (этап S109). Блок 113a обработки движущегося объекта затем упорядочивает множество целевых объектов, идентифицированных как цели средней опасности, по возрастанию расстояния до транспортного средства 1 (этап S110).
[0068] Если блок 113a обработки движущегося объекта определяет, что транспортное средство 1 не столкнется с целевым объектом и траектории транспортного средства 1 и целевого объекта не пересекутся (этап S104: прочее), блок 113a обработки движущегося объекта идентифицирует целевой объект как цель низкой опасности (этап S111). Блок 113a обработки движущегося объекта также определяет, например, расстояние от транспортного средства 1 до целевого объекта, идентифицированного как цель низкой опасности, на основе характеристик данного целевого объекта (этап S112). Блок 113a обработки движущегося объекта затем упорядочивает множество целевых объектов, идентифицированных как цели низкой опасности, по возрастанию расстояния до транспортного средства 1 (этап S113).
[0069] Блок 113a обработки движущегося объекта определяет (выбирает) приоритет наблюдения за каждым целевым объектом (в соответствии с числовыми значениями в таблице на ФИГ. 10) на основе результатов этапов S107, S110 и S113 и, например, таблицы на ФИГ. 10, определяющей приоритеты наблюдения (этап S114). На этапе S114 блок 113a обработки движущегося объекта переупорядочивает целевые объекты в порядке убывания приоритета наблюдения. Числовые значения в таблице на ФИГ. 10 представлены только в качестве примера и не ограничиваются этим.
[0070] В примере на ФИГ. 7 пешеход 511 определен как цель повышенной опасности или цель средней опасности. Так как пешеход 511 находится относительно далеко от транспортного средства 1, приоритет наблюдения для пешехода 511 составляет 6 (цель повышенной опасности) или 9 (цель средней опасности). Пешеход 512 и встречное транспортное средство 520 определены как цели низкой опасности. Так как пешеход 512 находится ближе к транспортному средству 1, чем встречное транспортное средство 520, приоритет наблюдения для пешехода 512 составляет, например, 11, а приоритет наблюдения для встречного транспортного средства 520 составляет, например, 12. В этом случае блок 113a обработки движущегося объекта упорядочивает пешехода 511, пешехода 512 и встречное транспортное средство 520 в данном порядке на основе их приоритетов наблюдения.
[0071] Блок 113b обработки неподвижного объекта определяет, например, местоположение неподвижного объекта, расстояние до транспортного средства 1, размер и т.д., исходя из характеристик неподвижного объекта. Блок 113b обработки неподвижного объекта определяет состояние движения транспортного средства 1 на основе вывода датчика 40 движения транспортного средства (например, прогнозирует будущее местоположение транспортного средства 1). Блок 113b обработки неподвижного объекта распознает столкновение между неподвижным объектом и транспортным средством 1 на основе местоположения и т.д. неподвижного объекта и будущего местоположения транспортного средства 1 (этап S115). На этапе S115 блок 113b обработки неподвижного объекта определяет, что (i) транспортное средство 1 столкнется с неподвижным объектом или (ii) транспортное средство 1 и неподвижный объект не столкнутся. Т.е. блок 113b обработки неподвижного объекта осуществляет распознавание столкновения на основе взаимного положения и взаимного движения транспортного средства 1 и неподвижного объекта.
[0072] Если блок 113b обработки неподвижного объекта определяет, что транспортное средство 1 столкнется с неподвижным объектом (этап S115: столкновение), блок 113b обработки неподвижного объекта идентифицирует неподвижный объект как неподвижный объект на траектории (этап S116). Блок 113b обработки неподвижного объекта также определяет, например, расстояние от транспортного средства 1 до неподвижного объекта, идентифицированного как неподвижный объект на траектории, на основе характеристик данного неподвижного объекта (этап S117). Блок 113b обработки неподвижного объекта затем упорядочивает множество неподвижных объектов, идентифицированных как неподвижные объекты на траектории, по возрастанию расстояния до транспортного средства 1 (этап S118).
[0073] Если блок 113b обработки неподвижного объекта определяет, что транспортное средство 1 и неподвижный объект не столкнутся (этап S115: прочее), блок 113b обработки неподвижного объекта идентифицирует неподвижный объект как не представляющий угрозы. Неподвижный объект, идентифицированный как не представляющий угрозы, исключают из дальнейшей обработки.
[0074] Блок 113 определения уровня угрозы интегрирует результат блока 113a обработки движущегося объекта (т.е. результат этапа S114) с результатом блока 113b обработки неподвижного объекта (т.е. результатом этапа S118) (этап S119).
[0075] В частности, блок 113 определения уровня угрозы сначала определяет приоритет наблюдения каждого неподвижного объекта, идентифицированного как неподвижный объект на траектории, на основе результата блока 113b обработки неподвижного объекта и, например, таблицы, показанной на ФИГ. 10. В это время блок 113 определения уровня угрозы определяет приоритет наблюдения каждого неподвижного объекта, идентифицированного как неподвижный объект на траектории, посредством ссылки на числовые значения в строке для «неподвижного объекта на траектории» в таблице, показанной на ФИГ. 10.
[0076] Блок 113 определения уровня угрозы затем переупорядочивает движущиеся и неподвижные объекты в порядке убывания приоритета наблюдения на основе результата блока 113a обработки движущегося объекта и приоритета наблюдения неподвижных объектов, идентифицированных как неподвижные объекты на траектории.
[0077] Блок 113 определения уровня угрозы отправляет результат этапа S119 на блок 114 управления информацией приблизительных измерений как информацию об уровне угрозы приблизительных измерений. Информация о времени добавлена к информации об уровне угрозы приблизительных измерений. Информация об уровне угрозы приблизительных измерений может содержать, например, местоположение, расстояние, размер, форму, направление движения и т.д. каждого объекта (т.е. движущегося или неподвижного объекта) в дополнение к его приоритету наблюдения.
[0078] В варианте осуществления изобретения, согласно раскрытому выше, уровень угрозы каждого объекта определяется на основе взаимосвязи между состоянием движения (например, будущим местоположением) транспортного средства 1 и путем и будущим местоположением движущегося объекта, а также взаимосвязи между состоянием движения транспортного средства 1 и будущим местоположением неподвижного объекта. Приоритет наблюдения каждого объекта определяется в соответствии с уровнем угрозы объекта, расстоянием от транспортного средства 1 до объекта и типом объекта (в этом примере — в соответствии с тем, является ли объект движущимся или неподвижным). Т.е. в сенсорной системе 110 приоритет наблюдения каждого объекта определяется по взаимному положению и взаимному движению транспортного средства 1 и объекта, а также типу объекта. Приоритет наблюдения каждого объекта может быть определен, по меньшей мере, по взаимному положению транспортного средства 1 и объекта, взаимному движению транспортного средства 1 и объекта, а также типу объекта.
[0079] Блок 114 управления информацией приблизительных измерений получает интегрированные данные наблюдения от блока 111 интеграции данных обнаружения и получает информацию об уровне угрозы приблизительных измерений от блока 113 определения уровня угрозы. Блок 114 управления информацией приблизительных измерений коррелирует интегрированные данные наблюдения и информацию об уровне угрозы приблизительных измерений друг с другом на основе информации о времени, добавленной к интегрированным данным наблюдения и информации об уровне угрозы приблизительных измерений. В результате аккумулируются данные наблюдения и информация об уровне угрозы приблизительных измерений.
[0080] Блок 114 управления информацией приблизительных измерений отправляет информацию об уровне угрозы приблизительных измерений на блок 121 планирования определения и наблюдения цели точных измерений блока 12 обработки данных точных измерений. В это время блок 114 управления информацией приблизительных измерений может ограничивать информацию, которая должна быть отправлена блоком 114 управления информацией приблизительных измерений на блок 121 планирования определения и наблюдения цели точных измерений, или обрабатывать эту информацию в ответ на запрос устройства 60 управления транспортным средством, полученный интерфейсным устройством 50. Блок 114 управления информацией приблизительных измерений отправляет интегрированные данные наблюдения на блок 13 интеграции и восприятия данных наблюдения.
[0081] Блок 114 управления информацией приблизительных измерений может регулировать параметры обработки для датчиков 20 приблизительных измерений в ответ на запрос устройства 60 управления транспортным средством, полученный интерфейсным устройством 50. Блок 114 управления информацией приблизительных измерений может отправлять отрегулированные параметры обработки на блок 115 управления наблюдением датчика приблизительных измерений.
[0082] Блок 115 управления наблюдением датчика приблизительных измерений управляет каждым датчиком 20 приблизительных измерений согласно инструкциям блока 114 управления информацией приблизительных измерений. В это время блок 115 управления наблюдением датчика приблизительных измерений может управлять каждым датчиком 20 приблизительных измерений на основе отрегулированных параметров обработки.
Блок обработки данных точных измерений
[0083] Блок 12 обработки данных точных измерений содержит блок 121 определения цели точных измерений и планирования наблюдения (далее по необходимости обозначенный как «блок 121 планирования наблюдения»), блок 122 управления наблюдением датчика точных измерений, блок 123 получения данных обнаружения и блок 124 управления информацией точных измерений.
[0084] Блок 121 планирования наблюдения определяет цели наблюдения каждого датчика 30 точных измерений и назначает порядок наблюдения и диапазоны наблюдения целей наблюдения на основе информации об уровне угрозы приблизительных измерений, полученной от блока 114 управления информацией приблизительных измерений.
[0085] В частности, блок 121 планирования наблюдения генерирует план наблюдения таким образом, что объекты наблюдаются в порядке убывания приоритета наблюдения, обозначенного информацией об уровне угрозы приблизительных измерений (т.е. в порядке убывания угрозы транспортному средству 1), исходя из информации о технических характеристиках каждого датчика 30 точных измерений (например, способ наблюдения, возможности наблюдения, такие как угловое разрешение, наблюдаемый диапазон (поле обзора), способ сканирования, скорость сканирования и т.д.). В случае, если невозможно завершить наблюдение всех объектов в рамках заранее заданного интервала наблюдения (например, одного периода кадра), блок 121 планирования наблюдения может исключать объект(ы) с низким приоритетом наблюдения, обозначенные информацией об уровне угрозы приблизительных измерений, из целей наблюдения.
[0086] Работа блока 121 планирования наблюдения будет раскрыта ниже со ссылкой на блок-схему на ФИГ. 11. Как показано на ФИГ. 11, блок 121 планирования наблюдения сначала получает информацию об уровне угрозы приблизительных измерений (этап S201). Блок 121 планирования наблюдения назначает порядок наблюдения целей наблюдения на основе приоритета наблюдения, содержащегося в информации об уровне угрозы приблизительных измерений (этап S202).
[0087] Параллельно с этапом S202 блок 121 планирования наблюдения определяет область наблюдения (т.е. диапазон, за которым должен наблюдать датчик 30 точных измерений) для каждой цели наблюдения (т.е. движущегося или неподвижного объекта) на основе координат целей наблюдения (т.е. местоположений целей наблюдения), содержащихся в информации об уровне угрозы приблизительных измерений (этап S203). Блок 121 планирования наблюдения затем распределяет датчики 30 точных измерений на основе областей наблюдения (этап S204). Область наблюдения является примером диапазона наблюдения, раскрытого выше.
[0088] Например, блок 121 планирования наблюдения определяет, что область A1 наблюдения, показанная на ФИГ. 8, является областью наблюдения для пешехода 511, показанного на ФИГ. 7. Аналогично, например, блок 121 планирования наблюдения определяет, что области A2 и A3 наблюдения, показанные на ФИГ. 8, являются областями наблюдения для встречного транспортного средства 520 и пешехода 512, показанных на ФИГ. 7, соответственно. Например, блок 121 планирования наблюдения затем распределяет датчик 30 точных измерений, способный наблюдать за областью напротив и слева от транспортного средства 1, в область A1 наблюдения. Блок 121 планирования наблюдения также распределяет датчик 30 точных измерений, способный наблюдать за областью напротив и справа от транспортного средства 1, в области A2 и A3 наблюдения.
[0089] Параллельно с этапами S202–S204 блок 121 планирования наблюдения определяет диапазон для наблюдения за целями наблюдения на основе размеров целей наблюдения и расстояний до целей наблюдения, содержащихся в информации об уровне угрозы приблизительных измерений (этап S205). Блок 121 планирования наблюдения назначает диапазон наблюдения каждого датчика 30 точных измерений на основе результата этапа S205 (этап S206).
[0090] Параллельно с этапами S202–S206 блок 121 планирования наблюдения определяет разрешение датчиков 30 точных измерений (этап S207). На этапе S207 блок 121 планирования наблюдения может получать угловое разрешение каждого датчика 30 точных измерений.
[0091] Например, если угловое разрешение датчиков 30 точного измерения составляет 0,2 градуса, разрешение на расстоянии 30 м перед транспортным средством 1 составляет около 10 см, при этом разрешение на расстоянии 10 м перед транспортным средством 1 составляет около 3,5 см. Если цель наблюдения находится на расстоянии 10 м перед транспортным средством 1, точность наблюдения результата наблюдения цели наблюдения при разрешении по дальности около 3,5 см может быть выше, чем точность наблюдения, требуемая для управления транспортным средством. В этом случае разрешение может быть намеренно снижено для уменьшения времени, необходимого для наблюдения. Т.е. на этапе S207 блок 121 планирования наблюдения может определять, например, разрешение датчиков 30 точных измерений, необходимое для управления транспортным средством.
[0092] Как следствие, блок 121 планирования наблюдения назначает этап сканирования, схему сканирования и размер луча для каждого датчика 30 точных измерений на основе разрешения, определенного на этапе S207, формы и информации о движении (например, направлении движения и т.д.) каждой цели наблюдения, содержащейся в информации об уровне угрозы приблизительных измерений (этап S208).
[0093] Примеры схемы сканирования включают схему сканирования, такую, как растровая развертка, показанная на ФИГ. 12A, и схему сканирования, показанную на ФИГ. 12B, на которой пятно луча s движется вдоль внешнего контура цели наблюдения. Предпочтительно, чтобы размер луча (например, размер пятна луча в местоположении цели наблюдения) составлял, например, от 1/10 до 1/100 размера цели наблюдения.
[0094] Как показано на ФИГ. 11, блок 121 планирования наблюдения определяет параметры каждого датчика 30 точных измерений на основе результатов этапов S204, S206 и S208 (этап S209). Затем блок 121 планирования наблюдения назначает количество целей, за которыми может осуществляться наблюдение в течение заранее заданного допустимого времени наблюдения на основе результатов этапов S202 и S209 и допустимого времени наблюдения (этап S210). Допустимое время наблюдения может быть временем, соответствующим одному циклу обновления данных. Например, в случае, когда данные обновляются 50 раз в секунду, цикл обновления данных составляет 20 миллисекунд.
[0095] Как следствие, блок 121 планирования наблюдения определяет цели наблюдения, за которыми фактически должны осуществлять наблюдение датчики 30 точных измерений, на основе результата этапа S210, и генерирует план наблюдения (этап S211). Согласно раскрытому выше, в соответствии с сенсорной системой 110, наблюдение за целью (объектом) наблюдения с высоким приоритетом имеет предпочтение перед целью наблюдения с низким приоритетом. Другими словами, в соответствии с сенсорной системой 110, область наблюдения каждого датчика 30 точных измерений определяется таким образом, что цель наблюдения с высоким приоритетом предпочтительнее включается в область наблюдения по сравнению с целью наблюдения с низким приоритетом.
[0096] Например, на ФИГ. 8 область A1 наблюдения содержит круглую область, соответствующую дорожному знаку 532 (см. ФИГ. 7), в дополнение к круглой области, соответствующей пешеходу 511 (см. ФИГ. 7). В этом случае наблюдение за пешеходом 511 и дорожным знаком 532 иногда одновременно повышает эффективность наблюдения.
[0097] Соответственно, например, блок 121 планирования наблюдения может осуществлять работу, показанную на ФИГ. 13 между этапами S210 и S211. В частности, блок 121 планирования наблюдения определяет присутствие или отсутствие любой другой цели наблюдения вокруг цели с высоким приоритетом с высоким приоритетом наблюдения (этап S301). В это время диапазон, обозначенный как «вокруг», может быть надлежащим образом определен в соответствии с, например, техническими характеристиками датчиков 30 точных измерений и т. д.
[0098] Блок 121 планирования наблюдения определяет, существует ли какая-либо другая цель наблюдения, на основе результата этапа S301 (этап S302). Если блок 121 планирования наблюдения определяет в ходе этапа S302 (этап S302: Да), что существует другая цель наблюдения, блок 121 планирования наблюдения определяет, можно ли одновременно наблюдать за целью с высоким приоритетом, используемой как эталонная цель на этапе S301, и другой целью наблюдения (этап S303).
[0099] Если блок 121 планирования наблюдения определяет на этапе S303, что можно одновременно наблюдать за целью с высоким приоритетом и другой целью наблюдения (этап S303: Да), блок 121 планирования наблюдения определяет время, необходимое для одновременного наблюдения (этап S304). Затем блок 121 планирования наблюдения снова определяет, можно ли одновременно наблюдать за целью с высоким приоритетом и другой целью наблюдения на основе результата этапа S304 (т.е. времени, необходимого для одновременного наблюдения) (этап S305).
[0100] Если блок 121 планирования наблюдения определяет на этапе S305, что можно одновременно наблюдать за целью с высоким приоритетом и другой целью наблюдения (этап S305: Да), блок 121 планирования наблюдения изменяет порядок наблюдения таким образом, что наблюдение за другой целью наблюдения осуществляется одновременно с целью с высоким приоритетом (этап S306).
[0101] Если блок 121 планирования наблюдения определяет на этапе S302, что другая цель наблюдения отсутствует (этап S302: Нет), когда блок 121 планирования наблюдения определяет на этапе S303, что невозможно одновременно наблюдать за целью с высоким приоритетом и другой целью наблюдения (этап S303: Нет), или когда блок 121 планирования наблюдения определяет на этапе S305, что невозможно одновременно наблюдать за целью с высоким приоритетом и другой целью наблюдения (этап S305: Нет), блок 121 планирования наблюдения заканчивает операцию, показанную на ФИГ. 13, без изменения порядка наблюдения (этап S307).
[0102] Блок 121 планирования наблюдения отправляет план наблюдения, сгенерированный согласно описанному выше, на блок 122 управления наблюдением датчика точных измерений и блок 124 управления информацией точных измерений.
[0103] Блок 122 управления наблюдением датчика точных измерений отправляет инструкции по наблюдению на блок управления каждого датчика 30 точных измерений в соответствии с планом наблюдения, полученным от блока 121 планирования наблюдения. Блок управления каждого датчика 30 точных измерений отправляет, например, информацию для назначения диапазона наблюдения, схему сканирования, этап сканирования, размер луча и т.д., на блок сканирования и блок наблюдения датчика 30 точных измерений в соответствии с инструкциями по наблюдению, полученными от блока 122 управления наблюдением датчика точных измерений. Работа блока управления каждого датчика 30 точных измерений может изменяться в зависимости от типа и технических характеристик каждого датчика 30 точных измерений.
[0104] Блок 123 получения данных обнаружения получает данные наблюдения от каждого датчика 30 точных измерений. Блок 123 получения данных обнаружения определяет состояние движения транспортного средства 1 на основе вывода датчика 40 движения транспортного средства. Затем блок 123 получения данных обнаружения удаляет элементы, которые представляют собой результат движения транспортного средства 1, из данных наблюдения. Таким образом, блок 123 получения данных обнаружения генерирует информацию точных измерений, т.е. данные наблюдения, содержащие только элементы, которые представляют собой результат движения целей наблюдения. Блок 123 получения данных обнаружения отправляет информацию точных измерений на блок 124 управления информацией точных измерений.
[0105] В случае, когда датчики 30 точных измерений являются лазерными локаторами или радарами, блок 123 получения данных обнаружения может обрабатывать данные облака точек, которые представляют собой данные наблюдения, в соответствии с характеристиками датчиков 30 точных измерений. В частности, в случае, когда датчики 30 точных измерений являются лазерными локаторами, блок 123 получения данных обнаружения может осуществлять обнаружение края, используя второе эхо. В случае, когда датчики 30 точных измерений являются радарами, блок 123 получения данных обнаружения может разделять цели наблюдения посредством допплеровского сдвига.
[0106] Блок 124 управления информацией точных измерений связывает план наблюдения, полученный от блока 121 планирования наблюдения, с информацией точных измерений, полученной от блока 123 получения данных обнаружения (т.е. результатом наблюдения каждого датчика 30 точных измерений в соответствии с планом наблюдения). Блок 124 управления информацией точных измерений отправляет план наблюдения и информацию точных измерений, связанные друг с другом, на блок 13 интеграции и восприятия данных наблюдения.
Блок интеграции и восприятия данных наблюдения
[0107] Блок 13 интеграции и восприятия данных наблюдения интегрирует данные наблюдения, полученные от блока 114 управления информацией точных измерений, план наблюдения и информацию точных измерений, полученную от блока 124 управления информацией точных измерений, и генерирует карту восприятия вокруг транспортного средства 1. Блок 13 интеграции и восприятия данных наблюдения обращается к карте восприятия и отправляет, например результаты наблюдения для целей повышенной опасности, на устройство 60 управления транспортным средством посредством интерфейсного устройства 50. Блок 13 интеграции и восприятия данных наблюдения может отправлять результаты наблюдения датчиков 20 точных измерений (например, интегрированные данные наблюдения), карту результатов наблюдения датчиков 20 приблизительных измерений с результатами наблюдения датчиков 30 точных измерений, встроенных в них (например, карту восприятия), и т.д. устройству 60 управления транспортным средством в ответ на запрос от устройства 60 управления транспортным средством.
[0108] Блок 13 интеграции и восприятия данных наблюдения мог аккумулировать карты восприятия. В этом случае блок 13 интеграции и восприятия данных наблюдения может отправлять прошлую(ые) карту(ы) распознавания или часть информации в прошлой(ых) карте(ах) распознавания, устройству 60 управления транспортным средством в ответ на запрос от устройства 60 управления транспортным средством.
Технический результат
[0109] Вокруг транспортного средства, которое осуществляет движение по дороге общественного значения, существует множество объектов. Данные объекты часто расположены близко друг к другу. В этом случае два (три или более) объекта, расположенных рядом, могут быть как один объект согласно результату наблюдения датчика с относительно низким угловым разрешением. Т.е. в связи с относительно низким угловым разрешением, датчик может не воспринимать два (три или более) объекта, расположенных рядом, как отдельные.
[0110] В частности, например, в случае, когда движущийся объект, такой как пешеход, и неподвижный объект, такой как дерево или куст, пересекаются друг с другом в поле обзора датчика во время автономного вождения транспортного средства или в случае, когда два движущихся в разных направлениях объекта пересекаются друг с другом в поле обзора датчика во время автономного вождения транспортного средства, с точки зрения управления транспортным средством, это будет составлять проблему, если движущиеся объекты нельзя будет легко воспринимать как отдельные от других.
[0111] Ожидается, что датчик с относительно высоким угловым разрешением сможет воспринимать два (три или более) объекта, расположенных рядом, как отдельные. Однако, в связи с относительно высоким угловым разрешением, время, необходимое для наблюдения, относительно длительное.
[0112] Это будет описано с использованием конкретных числовых значений. Например, тормозной путь транспортного средства, которое осуществляет движение со скоростью 60 км/ч, составляет около 40 м. С точки зрения безопасности требуется, чтобы датчик мог воспринимать, например, пешехода на расстоянии 50 м перед транспортным средством. Угловое разрешение, позволяющее датчику воспринимать пешехода на расстоянии 50 м перед транспортным средством, составляет, например, 0,2 градуса. В этом случае разрешение на расстоянии 50 м перед транспортным средством составляет около 18 см.
[0113] В случае, когда время, необходимое для одного наблюдения (т.е. время, необходимое датчику для наблюдения за всем доступным для наблюдения диапазоном), составляет, например, 20 миллисекунд, транспортное средство, которое осуществляет движение со скоростью 60 км/ч, перемещается приблизительно на 30 см в течение одного наблюдения. Т.е. положение датчика, которое представляет собой исходную точку наблюдения, смещается приблизительно на 30 см во время одного наблюдения. С точки зрения значения разрешения на расстоянии 50 м перед транспортным средством, считают, что данное смещение около 30 см обладает относительно значительным влиянием на результат наблюдения датчика. Поэтому невозможно наблюдать за всей обстановкой вокруг совершающего движение транспортного средства только при помощи датчика(ов) с относительно высоким угловым разрешением.
[0114] Таким образом, в сенсорной системе 110 области наблюдения датчиков 30 точных измерений сначала назначаются как, например, приблизительные местоположения целей повышенной опасности (т.е. диапазоны для наблюдения датчиками 30 точных измерений ограничены) на основе результатов наблюдения датчиков 20 приблизительных измерений (интегрированные данные наблюдения). Затем датчики 30 точных измерений наблюдают за назначенными областями наблюдения. В соответствии с сенсорной системой 110, датчики 30 точных измерений осуществляют наблюдение только за целями, которые могут повлиять на движение транспортного средства 1, такими, как цели повышенной опасности. Относительно точные результаты наблюдения, таким образом, могут быть получены с уменьшением времени, необходимого для одного наблюдения. В сенсорной системе 110 два объекта, расположенных рядом друг с другом, таким образом, могут быть восприняты как отдельные с уменьшением времени, необходимого для одного наблюдения.
Модификации
Первая модификация
[0115] При определении приоритетов наблюдения неподвижных объектов блок 113 определения уровня угрозы различает неподвижный объект, расположенный над транспортным средством 1, такой, как дорожный знак, и неподвижный объект, расположенный на поверхности дороги, по которой осуществляет движение транспортное средство 1, вместо или в дополнение к выполнению блок-схемы, показанной на ФИГ. 9. Блок 113 определения уровня угрозы может только назначать неподвижный объект, расположенный на поверхности дороги, как цель повышенной опасности (в то же время неподвижный объект, расположенный над транспортным средством 1, может быть исключен из целей наблюдения). Т.е. блок 113 определения уровня угрозы может назначать более высокий приоритет наблюдения для неподвижного объекта, расположенного на поверхности дороги, чем для неподвижного объекта, расположенного над транспортным средством 1.
Вторая модификация
[0116] Когда объект, соответствующий пешеходу, удается обнаружить благодаря интегрированным данным наблюдения и по будущему местоположению и т.п. объекта, соответствующего пешеходу, и предполагается, что объект будет находиться на траектории транспортного средства 1, блок 113a обработки движущегося объекта блока 113 определения уровня угрозы может определять объект как цель повышенной опасности. В частности, когда поворот транспортного средства 1 направо или налево определяется, например, по плану движения транспортного средства 1, тому факту, что транспортное средство 1 движется по правоповоротной полосе и т.д., блок 113a обработки движущегося объекта может оценивать путь транспортного средства 1, связанный с поворотом направо или налево. Когда предполагается, что объект, соответствующий пешеходу, будет находиться на траектории транспортного средства 1, движущегося по предполагаемому пути, блок 113a обработки движущегося объекта может определять объект как цель повышенной опасности. Блок 113 определения уровня угрозы, таким образом, назначает относительно высокий приоритет наблюдения для объекта, идентифицированного как пешеход.
[0117] При такой конфигурации можно предварительно оценить значительное изменение, которое произойдет в направлении движения транспортного средства 1 и которое сложно предварительно обнаружить посредством датчика 40 движения транспортного средства. Таким образом, датчик 30 точных измерений может наблюдать, например, за объектом, соответствующим пешеходу, который в данное время не находится на траектории транспортного средства 1, но будет находиться на траектории транспортного средства 1, когда транспортное средство 1 повернет направо или налево.
Третья модификация
[0118] Когда цель, соответствующая движущемуся объекту, обладающему относительно малой эффективной отражающей способностью и осуществляемому движение с относительно низкой скоростью, обнаружена, исходя из результатов наблюдения, содержащихся в интегрированных данных наблюдения, а именно результатах наблюдения радарных датчиков, которые представляют собой датчики 20 приблизительных измерений (т.е. информация о цели, которая представляет собой информацию о множестве целей, каждая из которых состоит из множества отражающих точек), блок 113a обработки движущегося объекта блока 113 определения уровня угрозы может идентифицировать цель как пешехода. В отличие от транспортных средств, пешеходы иногда неожиданно меняют траекторию. Блок 113a обработки движущегося объекта может, таким образом, определять цель, идентифицированную как пешеход, как цель повышенной опасности, независимо от ее местоположения и т.д. Блок 113 определения уровня угрозы, таким образом, назначает относительно высокий приоритет наблюдения для цели, идентифицированной как пешеход.
[0119] Является ли эффективная отражающая площадь относительно малой, может быть определено в зависимости от того, является ли эффективная отражающая площадь равной или меньшей, чем первое заранее заданное значение. Диапазон эффективной отражающей площади, который может быть принят, когда осуществляющий движение объект является пешеходом, получают экспериментально, эмпирически или посредством моделирования, и первое заранее заданное значение определяют на основе полученного диапазона. Является ли скорость осуществляющего движение тела относительно малой, может быть определено в зависимости от того, является ли скорость равной или меньшей, чем второе заранее заданное значение. Диапазон скорости, который может быть принят, когда осуществляющий движение объект является пешеходом, получают экспериментально, эмпирически или посредством моделирования, и второе заранее заданное значение определяют на основе полученного диапазона скорости.
Четвертая модификация
[0120] Как показано на ФИГ. 2 и 3, поле обзора датчика 20 приблизительных измерений и поле обзора датчика 30 точных измерений различаются. Например, когда транспортное средство 1 осуществляет движение по узкой дороге с плохой видимостью, возможно присутствие цели повышенной опасности, внесенной в поле обзора датчика 20 приблизительных измерений, но не внесенной в поле обзора датчика 30 точных измерений в первый момент времени. В этом случае блок 121 планирования наблюдения блока 12 обработки данных точных измерений может определять область наблюдения датчика 30 точных измерений таким образом, что цель повышенной опасности включается в область наблюдения, когда цель повышенной опасности входит в поле обзора датчика 30 точных измерений во второй момент времени, который позже, чем первый момент времени.
Пятая модификация
[0121] Блок 113 определения уровня угрозы может определять приоритет наблюдения каждого движущегося объекта путем использования картографической информации в дополнение к результату обработки блока 113a обработки движущегося объекта. Например, вероятность того, что движущийся объект, расположенный рядом с перекрестком, неожиданно изменит траекторию, выше, чем вероятность изменения траектории движущегося объекта, расположенного в другом месте (например, так как пешеход будет переходить дорогу, а транспортное средство будет поворачивать направо или налево). Соответственно, приоритет наблюдения каждого движущегося объекта может быть определен более соответствующим образом путем использования не только расстояния от транспортного средства 1 до движущегося объекта, но также и картографической информации.
Шестая модификация
[0122] В вышеуказанном варианте осуществления изобретения объекты, подлежащие наблюдению датчиками 30 точных измерений, определяются из множества объектов, наблюдаемых датчиками 20 приблизительных измерений. Однако датчики 30 точных измерений могут наблюдать за областью, за которой не наблюдали датчики 20 приблизительных измерений.
[0123] В частности, блок 11 обработки данных приблизительных измерений получает информацию о полосе движения, являющуюся информацией о полосе(ах) движения перед транспортным средством 1, из изображения области перед транспортным средством 1, снятого, например камерой, являющейся датчиком 20 приблизительных измерений. Блок 11 обработки данных приблизительных измерений отправляет информацию о полосе движения блоку 121 планирования наблюдения. Когда блок 121 планирования наблюдения обнаруживает, исходя из полученной информации о полосе, что перед транспортным средством 1 присутствует правоповоротная полоса, и определяет по, например, состоянию движения и т.д. транспортного средства 1, на основе вывода датчика 40 движения транспортного средства, что транспортное средство 1 заехало на правоповоротную полосу, блок 121 планирования наблюдения может определить область наблюдения датчика 30 точных измерений таким образом, что область, которую проходит транспортное средство 1, поворачивающее направо, включается в область наблюдения.
[0124] Блок 11 обработки данных приблизительных измерений получает информацию о дороге, которая представляет собой информацию о дороге перед транспортным средством 1, из изображения области перед транспортным средством 1, снятого, например, камерой, которая представляет собой датчик 20 приблизительных измерений. Блок 11 обработки данных приблизительных измерений отправляет информацию о дороге блоку 121 планирования наблюдения. Когда блок 121 планирования наблюдения определяет из полученной информации о дороге, что количество полос уменьшается перед транспортным средством 1, блок 121 планирования наблюдения может определять область наблюдения датчика 30 точных измерений таким образом, что точка слияния, являющаяся точкой, в которой уменьшается количество полос, вносится в область наблюдения.
[0125] Блок 11 обработки данных приблизительных измерений получает информацию о знаках, которая представляет собой информацию о дорожном(ых) знаке(ах) и/или дорожной разметке вокруг транспортного средства 1, по изображениям, снятым камерами, которые представляют собой датчики 20 приблизительных измерений. Блок 11 обработки данных приблизительных измерений отправляет информацию о знаках блоку 121 планирования наблюдения. Блок 121 планирования наблюдения может определять области наблюдения датчиков 30 точных измерений на основе информации о знаках.
[0126] Здесь предполагают, что в примере, показанном на ФИГ. 7, наблюдение за дорожной разметкой 531 и/или дорожным знаком 532 было осуществлено датчиком 20 приблизительных измерений. Дорожная разметка 531 и дорожный знак 532 обозначают, что впереди транспортного средства 1 присутствует перекресток. В этом случае блок 121 планирования наблюдения может определять область наблюдения датчика 30 точных измерений таким образом, что перекресток вносится в область наблюдения.
[0127] При вышеуказанной конфигурации получают относительно точную информацию о наблюдении в области, в которой относительно большое количество движущихся объектов находится или будет находиться на траектории транспортного средства 1.
Примеры применения
Первый Пример применения
[0128] Сенсорная система 110 применима не только к одному транспортному средству, но также, например, к множеству транспортных средств, движущихся колонной, посредством взаимодействия друг с другом. В этом случае датчик(и) 20 приблизительных измерений может(гут) быть установлен(ы) только на ведущее транспортное средство колонны и может(ут) не быть установленным(и) на другие транспортные средства, следующие за ведущим транспортным средством. Т.е. другие транспортные средства могут получать от ведущего транспортного средства результат наблюдения датчика(ов) 20 приблизительных измерений, установленного(ых) на ведущее транспортное средство. Таким образом, может быть реализовано действие, аналогичное описанному выше действию сенсорной системы 110.
Второй Пример применения
[0129] Сенсорная система 110 применима не только к наземному транспортному средству, но также к, например, беспилотному движущемуся объекту, такому как дрон. Сенсорная система 110 также применима к множеству беспилотных движущихся объектов, движущихся группой или колонной. В этом случае множество беспилотных движущихся тел может содержать беспилотный движущийся объект, оснащенный только датчиком(ами) 20 приблизительного измерения, и беспилотный движущийся объект, оснащенный только датчиком(ами) 30 точных измерений. Множество беспилотных движущихся тел может включать беспилотный движущийся объект, обладающий только функциями, соответствующими блоку 10 управления в сенсорной системе 110. Т.е. одна сенсорная система 110 может быть реализована всем множеством беспилотных движущихся объектов.
[0130] Ниже будут раскрыты различные аспекты изобретения, которые представляют собой производные вышеуказанных вариантов осуществления изобретения и модификаций.
[0131] Бортовая сенсорная система, согласно одному аспекту изобретения, является бортовой сенсорной системой, содержащей первый датчик, сконфигурированный для определения обстановки вокруг транспортного средства, и второй датчик, обладающий более высоким угловым разрешением, чем первый датчик. Бортовая сенсорная система также содержит: блок сбора данных, сконфигурированный для получения результата обнаружения от первого датчика; и блок определения диапазона, сконфигурированный так, чтобы на основе результата обнаружения определять диапазон наблюдения для выполнения наблюдения вторым датчиком. В вышеуказанном варианте осуществления изобретения датчик 20 приблизительных измерений является примером первого датчика, датчик 30 точных измерений является примером второго датчика, блок 111 интеграции данных обнаружения является примером блока сбора данных, а блок 121 планирования определения и наблюдения цели точных измерений является примером блока определения диапазона.
[0132] В одном аспекте бортовой сенсорной системы блок сбора данных сконфигурирован для сбора информации о препятствии, являющемся результатом обнаружения, при этом информация о препятствии является информацией о препятствиях, существующих вокруг транспортного средства. Бортовая сенсорная система дополнительно содержит блок определения уровня приоритета, сконфигурированный для для того, чтобы на основе информации о препятствии определять уровни приоритета обнаружения препятствий исходя из, по меньшей мере, одного показателя из следующих показателей: взаимного положения каждого препятствия и транспортного средства, взаимного движения каждого препятствия и транспортного средства и типа каждого препятствия. Блок определения диапазона сконфигурирован для определения диапазона наблюдения таким образом, что препятствия с высоким уровнем приоритета обнаружения предпочтительнее включаются в диапазон наблюдения перед препятствиями с низким уровнем приоритета обнаружения.
[0133] «Взаимное положение» — это концепция, не ограниченная относительным взаимным расположением транспортного средства и препятствия при рассмотрении транспортного средства в плоскости, наблюдаемой сверху (т.е. в двумерной системе координат), но также содержит относительное взаимное расположение транспортного средства и препятствия в трехмерной системе координат, также содержащей направление высоты. Выражение «определить уровень приоритета обнаружения по взаимному положению» не ограничено определением уровня приоритета по самому взаимному положению, но может содержать определение уровня приоритета обнаружения по физическому количеству или параметру, полученному из взаимного положения (например, расстоянию между транспортным средством и препятствием и т.д.). В раскрытом выше варианте осуществления изобретения блок 113 определения уровня угрозы является примером блока определения уровня приоритета, и приоритет наблюдения является примером определенного уровня приоритета.
[0134] В аспекте, содержащем блок определения уровня приоритета, блок определения уровня приоритета может быть сконфигурирован для того, чтобы в ситуации, когда препятствия включают первый неподвижный объект, расположенный выше транспортного средства, и второй неподвижный объект, который расположен на поверхности дороги, по которой движется транспортное средство, назначать более высокий уровень приоритета обнаружения для второго неподвижного объекта, чем для первого неподвижного объекта, исходя из взаимного положения первого неподвижного объекта и транспортного средства и взаимного положения второго неподвижного объекта и транспортного средства.
[0135] В аспекте, содержащем блок определения уровня приоритета, блок определения уровня приоритета может быть сконфигурирован для того, чтобы, если препятствия включают пешехода, в ситуации, когда блок определения уровня приоритета предполагает, что пешеход будет находиться по курсу транспортного средства, исходя из взаимного движения пешехода и транспортного средства, чем в ситуации, когда блок определения уровня приоритета не предполагает, что пешеход будет находиться по курсу транспортного средства.
[0136] В аспекте, содержащем блок определения уровня приоритета, первый датчик может быть радарным датчиком, блок сбора данных может быть сконфигурирован для сбора информации о цели в качестве информации о препятствии, при этом информация о цели является информацией о множестве целей, каждая из которых состоит из множества отражающих точек. Блок определения уровня приоритета может быть сконфигурирован для того, чтобы в случае, когда цели включают конкретную цель, назначать более высокий уровень приоритета обнаружения для конкретной цели, чем, по меньшей мере, для части целей, отличных от конкретной цели, причем конкретная цель является целью, соответствующей движущемуся объекту, скорость конкретной цели равна или меньше заранее заданной скорости, и эффективная отражающая площадь конкретной цели равна или меньше заранее заданной эффективной отражающей площади цели.
[0137] В аспекте, содержащем блок определения уровня приоритета, когда транспортное средство остановлено, по меньшей мере, часть доступного для наблюдения диапазона второго датчика может отличаться от диапазона обнаружения первого датчика. Блок определения диапазона может быть сконфигурирован таким образом, что препятствия с высоким уровнем приоритета обнаружения включаются в диапазон наблюдения в случае, если в первый момент времени препятствия высокого уровня приоритета обнаружения расположены вне доступного для наблюдения диапазона наблюдения, и во второй момент времени, который позже, чем первый момент времени, препятствия высокого уровня приоритета обнаружения находятся в доступном для наблюдения диапазоне. В вышеуказанном варианте осуществления изобретения поле обзора датчика 20 приблизительных измерений является примером диапазона определения первого датчика, и поле обзора датчика 30 точных измерений является примером диапазона наблюдения второго датчика.
[0138] В аспекте, содержащем блок определения уровня приоритета, блок определения уровня приоритета может быть конфигурирован для определения уровней приоритета обнаружения препятствий путем дополнительного использования картографической информации, соответствующей области, включающей, по меньшей мере, часть препятствий.
[0139] В другом аспекте бортовой сенсорной системы блок сбора данных сконфигурирован для сбора информации о полосе движения в качестве результата обнаружения, при этом информация о полосе движения является информацией о полосе движения перед транспортным средством, и блок определения диапазона сконфигурирован для того, чтобы при обнаружении в информации о полосе движения того, что перед транспортным средством находится правоповоротная полоса движения и что транспортное средство вошло на правоповоротную полосу движения, определять диапазон наблюдения таким образом, чтобы область, которую пересекает транспортное средство, поворачивающее направо, была включена в диапазон наблюдения.
[0140] В другом аспекте бортовой сенсорной системы блок сбора данных сконфигурирован для сбора информации о дорожной обстановке в качестве результата обнаружения, при этом информация о дорожной обстановке является информацией о дорожной обстановке перед транспортным средством, и блок определения диапазона сконфигурирован для того, чтобы при обнаружении из информации о дорожной обстановке того, что количество полос перед транспортным средством уменьшается, определять диапазон наблюдения таким образом, чтобы в диапазон наблюдения была включена точка слияния полос движения, при этом точка слияния полос движения является точкой, в которой количество полос перед транспортным средством уменьшается.
[0141] В другом аспекте бортовой сенсорной системы блок сбора данных сконфигурирован для сбора информации о знаках в качестве результата обнаружения, при этом информация о знаках является информацией, по меньшей мере, об одном из дорожных знаков и дорожной разметки, существующих вокруг транспортного средства, и блок определения диапазона сконфигурирован для определения диапазона наблюдения на основе информации о знаках.
[0142] В дополнительном аспекте бортовой сенсорной системы бортовая сенсорная система может дополнительно содержать блок управления, сконфигурированный для управления направлением излучения остронаправленного луча, при этом второй датчик является датчиком, сконфигурированным для излучения остронаправленного луча. Блок сбора данных сконфигурирован для сбора информации о форме в качестве результата обнаружения, при этом информация о форме является информацией о форме препятствий, существующих вокруг транспортного средства. Блок определения диапазона сконфигурирован для определения диапазона наблюдения на основе информации о форме. Блок управления сконфигурирован для управления направлением излучения луча на основе информации о форме таким образом, что остронаправленный луч сканируется вдоль внешнего контура препятствий.
[0143] Изобретение не ограничено раскрытым выше вариантом осуществления и может быть соответствующим образом изменено без отступления от сущности или идеи изобретения, указанных в формуле изобретения и в описании изобретения, и бортовая сенсорная система, измененная таким образом, также входит в технический объем охраны изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| ВАРИАНТЫ УПРАВЛЕНИЯ РАБОТОЙ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2744640C1 |
| СТРУКТУРА ВЕРОЯТНОСТНОГО ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ И ПРОГНОЗИРОВАНИЯ | 2018 |
|
RU2756872C1 |
| СИСТЕМА ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ ВОКРУГ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2678909C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| АВТОМАТИЧЕСКОЕ АСИММЕТРИЧНОЕ ОБНАРУЖЕНИЕ УГРОЗЫ С ИСПОЛЬЗОВАНИЕМ ОТСЛЕЖИВАНИЯ В ОБРАТНОМ НАПРАВЛЕНИИ И ПОВЕДЕНЧЕСКОГО АНАЛИЗА | 2005 |
|
RU2316821C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| ПЛАНИРОВАНИЕ ТРАЕКТОРИИ | 2019 |
|
RU2762786C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ РИСКА СТОЛКНОВЕНИЯ С ПРЕПЯТСВИЕМ | 2015 |
|
RU2675767C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
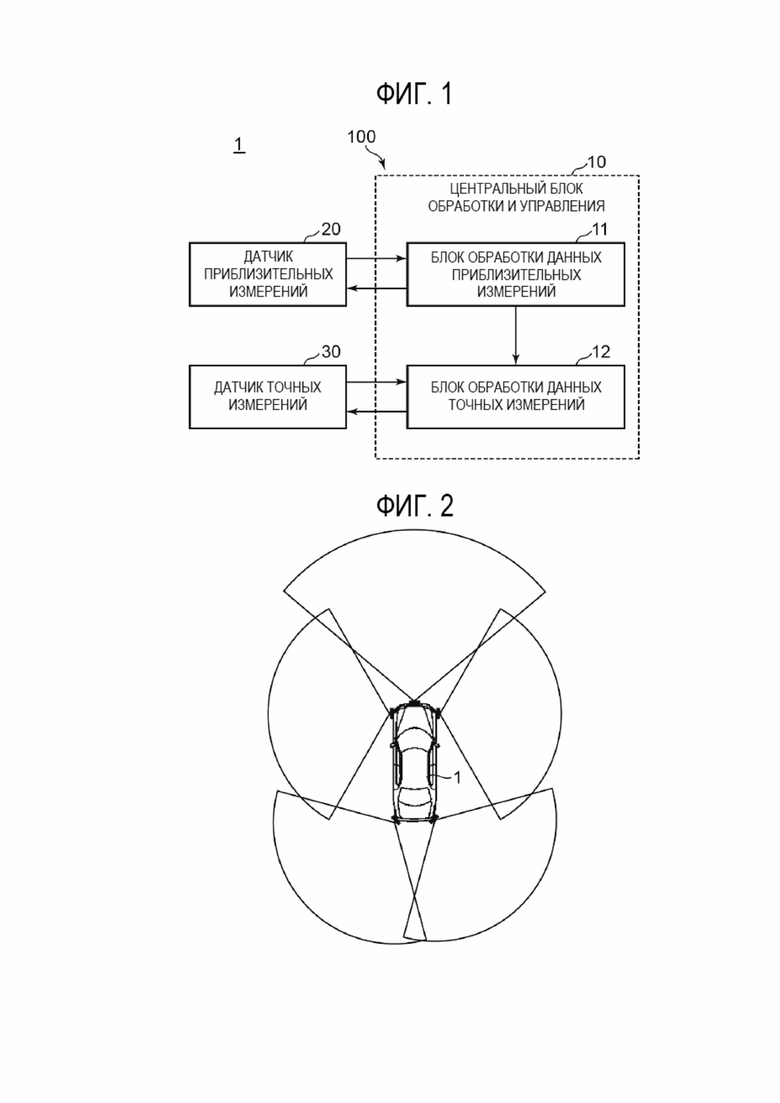
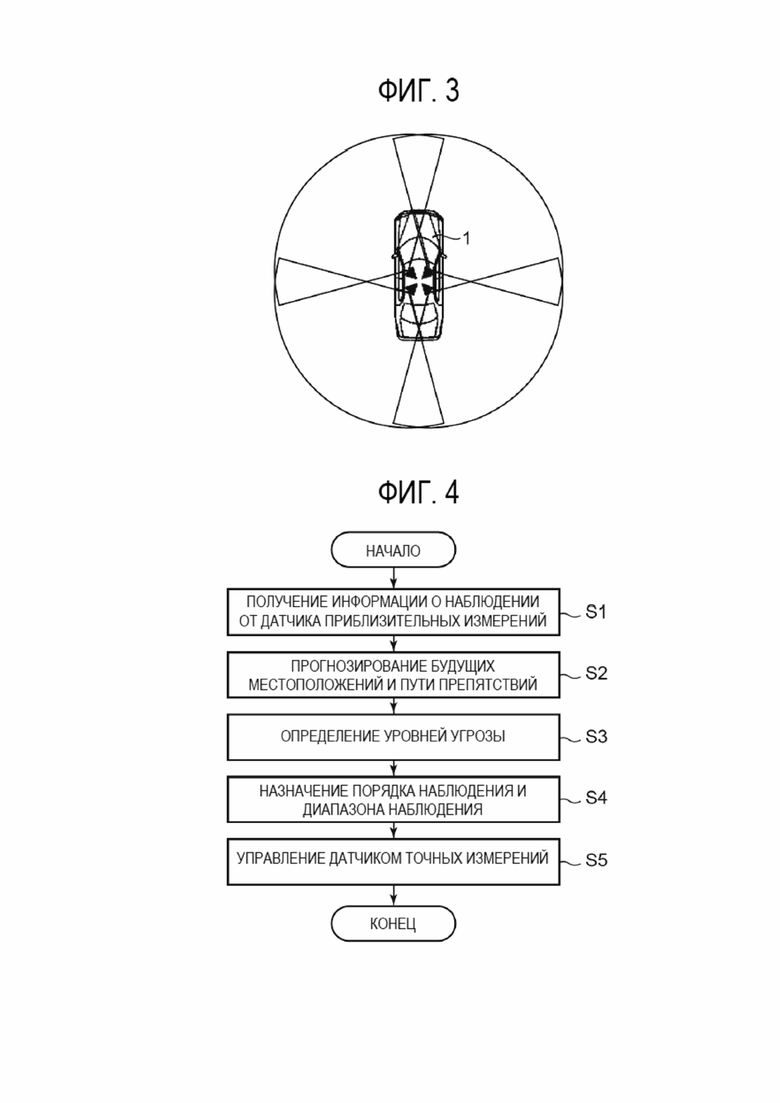
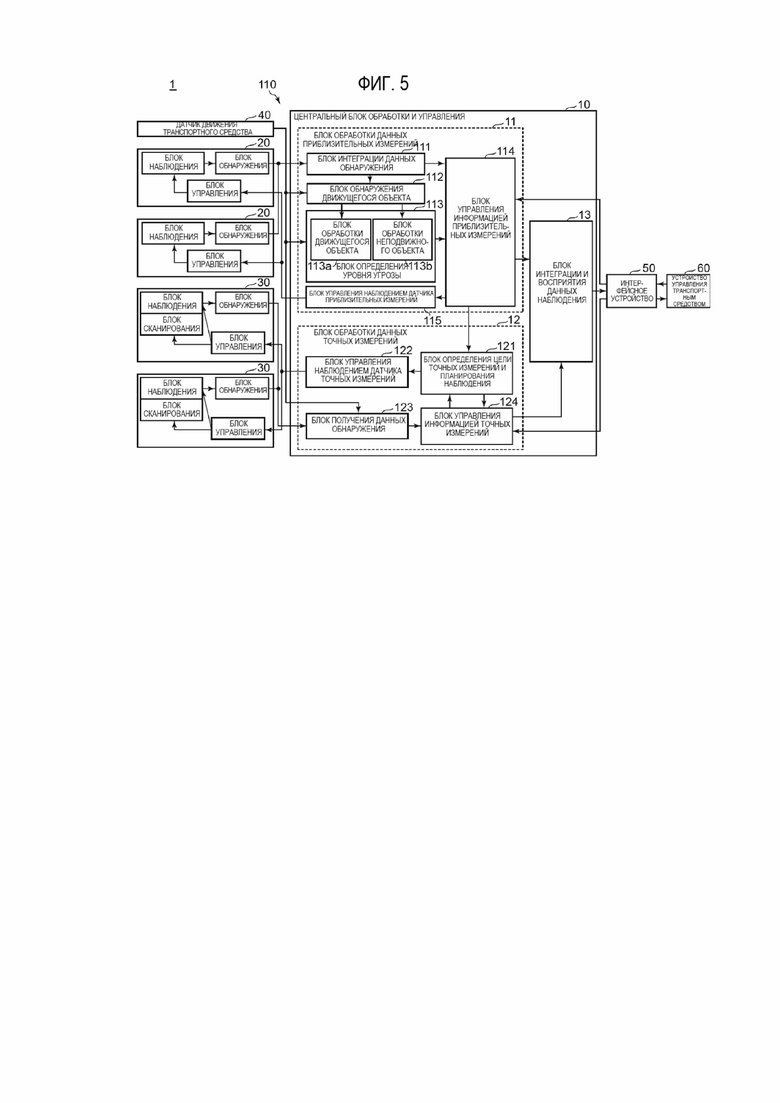
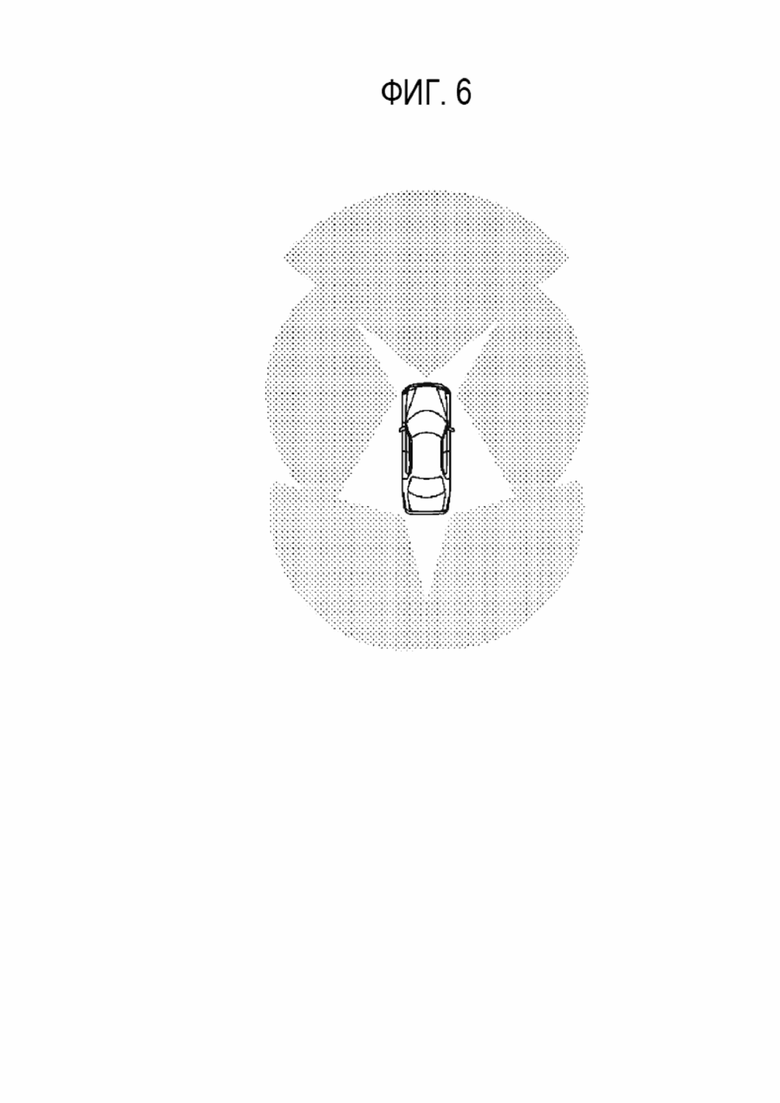
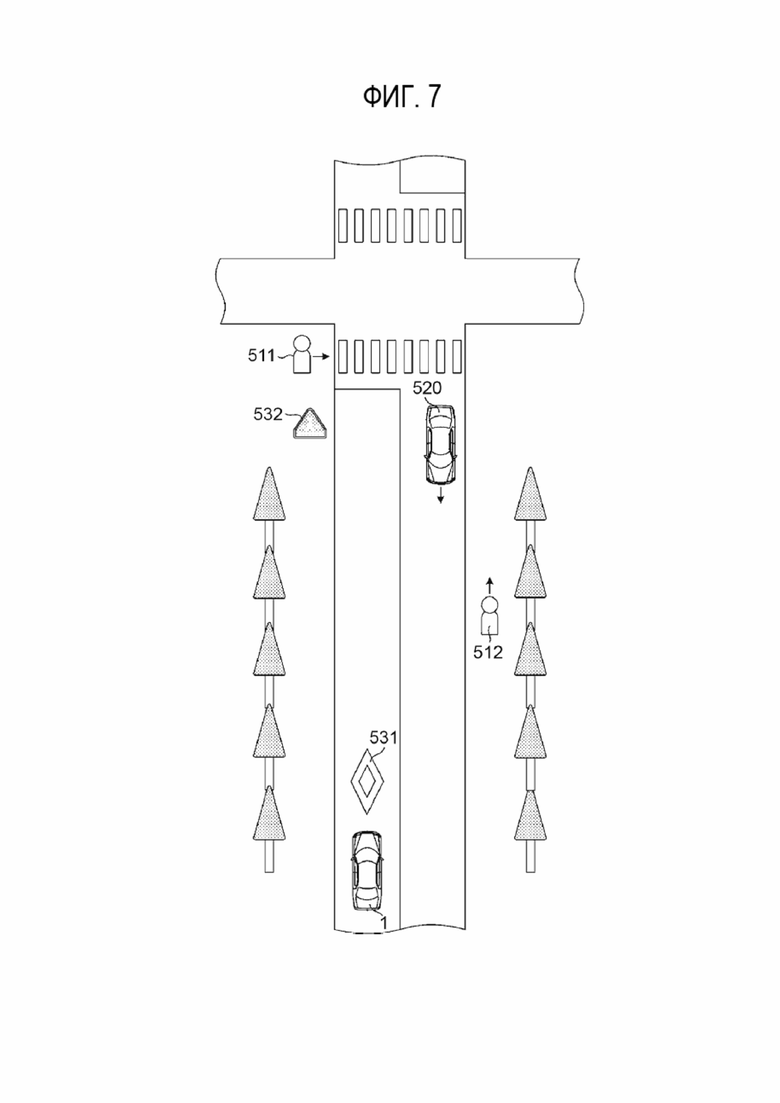
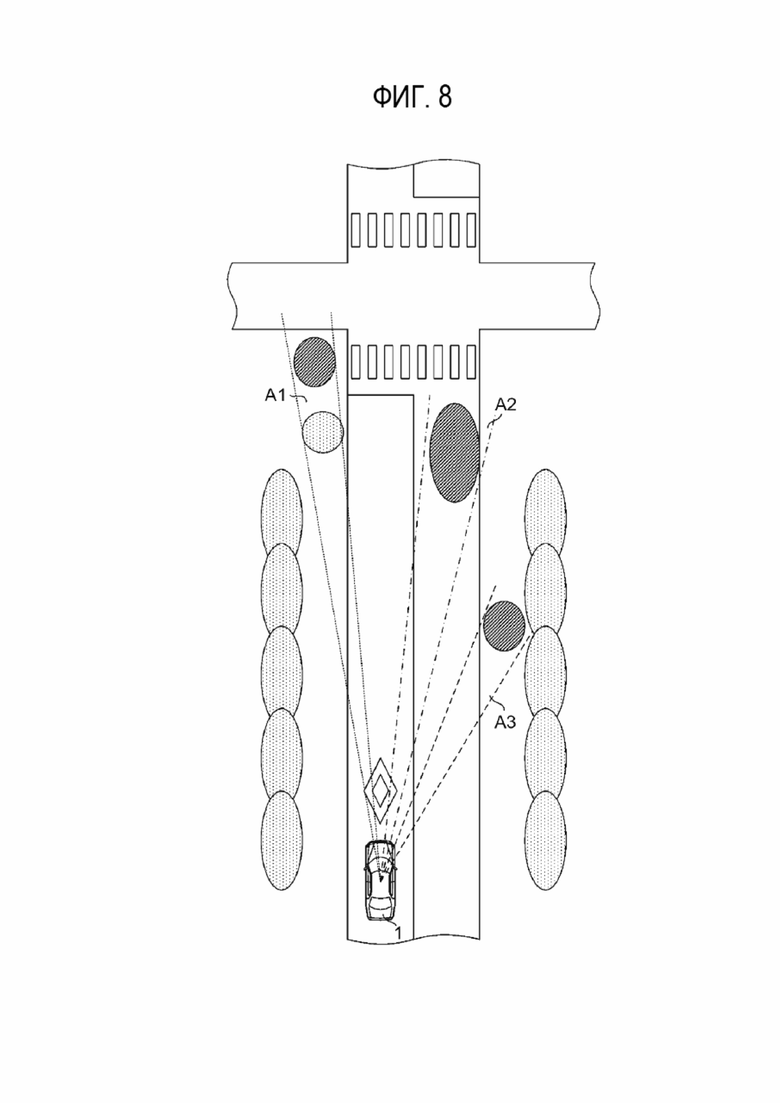
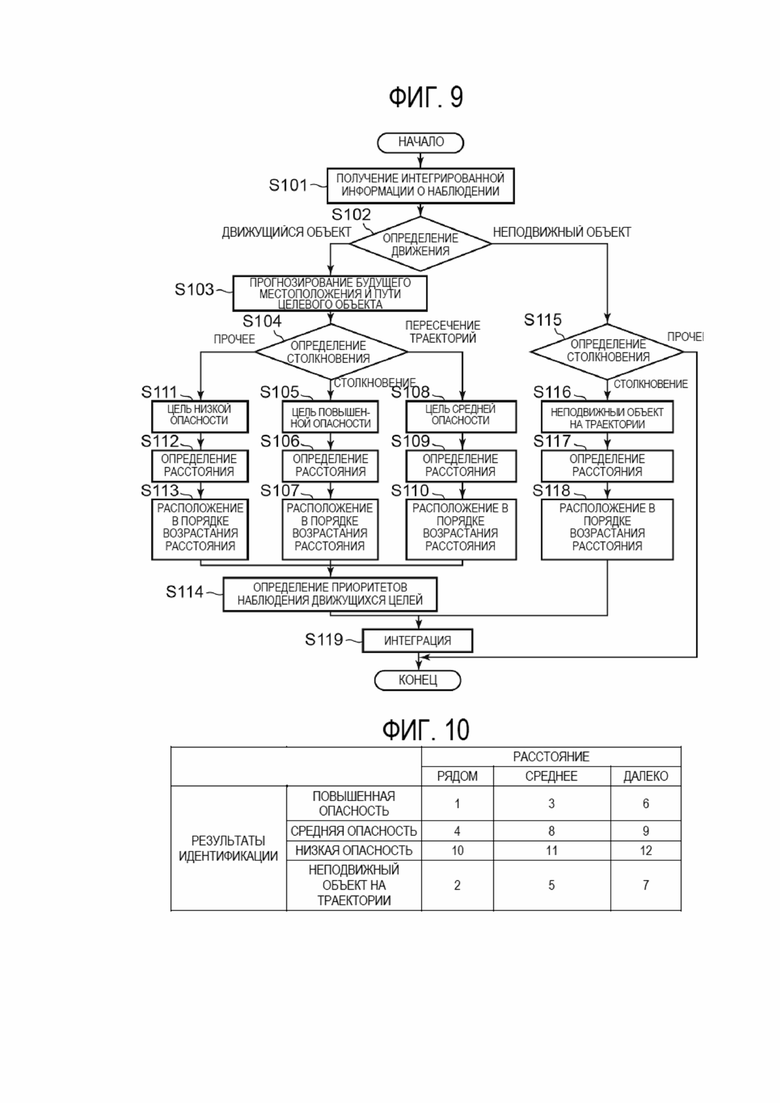
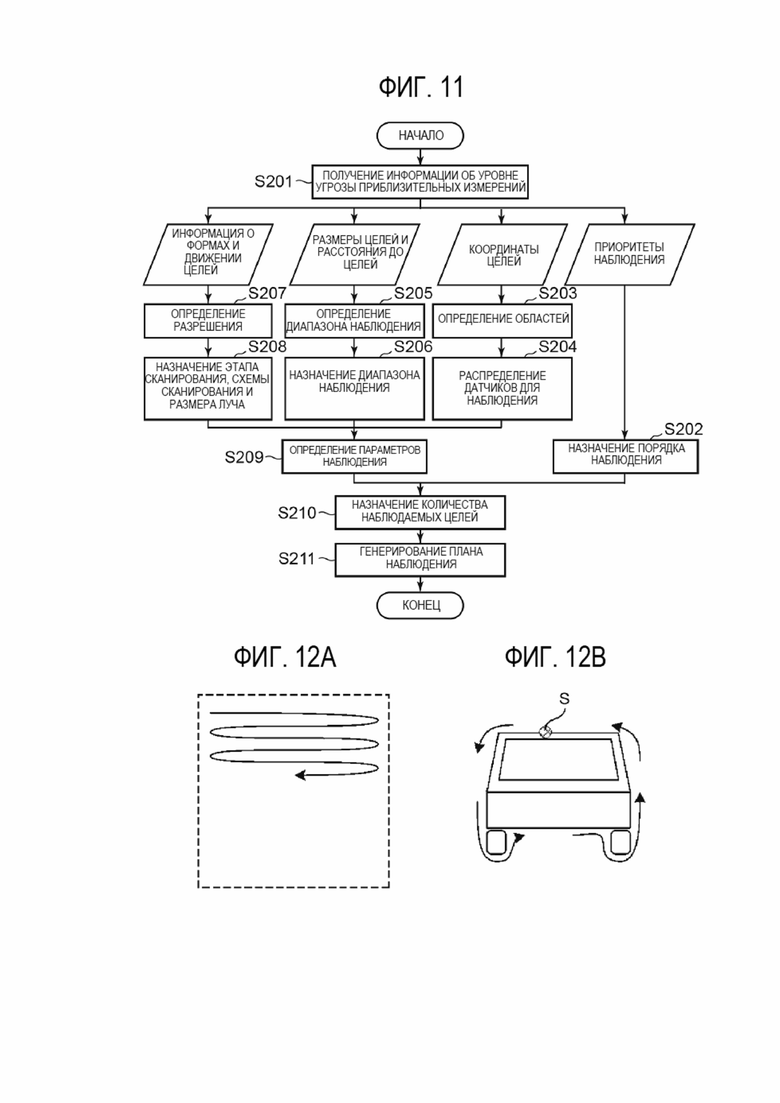
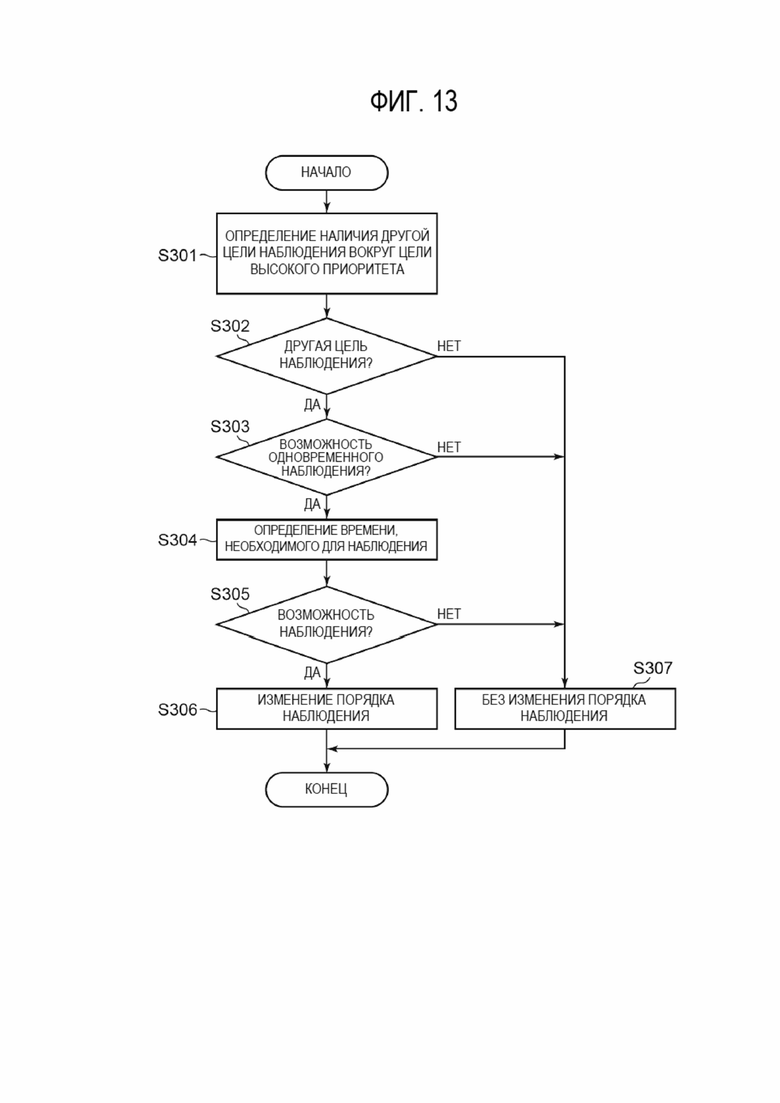
Изобретение относится к области бортовых сенсорных систем. Бортовая сенсорная система содержит первый датчик, сконфигурированный для определения обстановки вокруг транспортного средства, и второй датчик, обладающий более высоким угловым разрешением, чем первый датчик, и дополнительно содержит блок сбора данных, блок определения диапазона, сконфигурированный так, чтобы на основе результата обнаружения определять диапазон наблюдения для выполнения наблюдения вторым датчиком и блок определения уровня приоритета, сконфигурированный для того, чтобы на основе информации о препятствии определять уровни приоритета обнаружения препятствий исходя из одного показателя из следующих показателей: взаимного положения каждого препятствия и транспортного средства, взаимного движения каждого препятствия и транспортного средства и типа каждого препятствия. Блок сбора данных сконфигурирован для сбора информации о препятствии, являющемся результатом обнаружения, при этом информация о препятствии является информацией о препятствиях, существующих вокруг транспортного средства, и блок определения диапазона сконфигурирован для определения диапазона наблюдения так, что препятствия с высоким уровнем приоритета обнаружения предпочтительнее включаются в диапазон наблюдения по сравнению с препятствиями с низким уровнем приоритета обнаружения. Достигается повышение точности результатов наблюдения сенсорной системой. 9 з.п. ф-лы, 14 ил.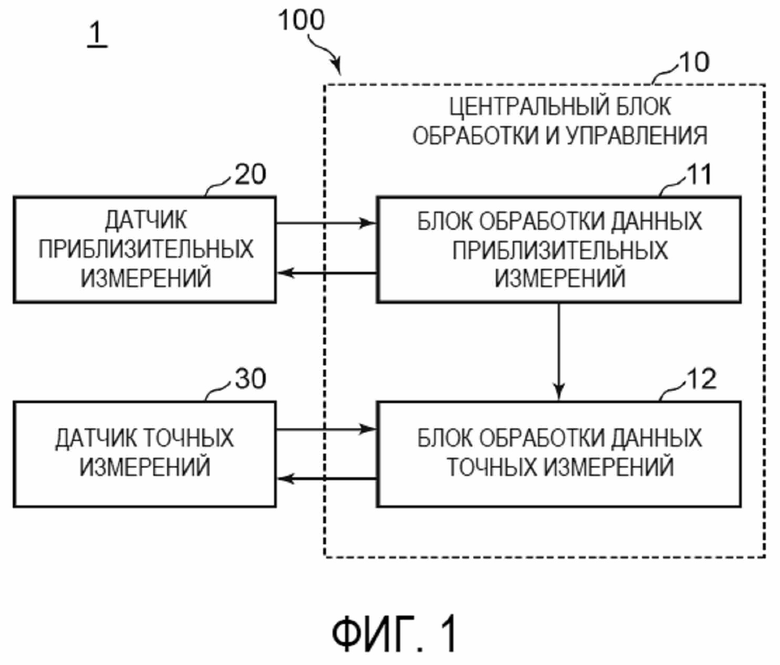
1. Бортовая сенсорная система, содержащая первый датчик, сконфигурированный для определения обстановки вокруг транспортного средства, и второй датчик, обладающий более высоким угловым разрешением, чем первый датчик, и дополнительно содержащая:
блок сбора данных, сконфигурированный для получения результата обнаружения от первого датчика; и
блок определения диапазона, сконфигурированный так, чтобы на основе результата обнаружения определять диапазон наблюдения для выполнения наблюдения вторым датчиком; и
блок определения уровня приоритета, сконфигурированный для того, чтобы на основе информации о препятствии определять уровни приоритета обнаружения препятствий исходя из, по меньшей мере, одного показателя из следующих показателей: взаимного положения каждого препятствия и транспортного средства, взаимного движения каждого препятствия и транспортного средства и типа каждого препятствия, причем:
блок сбора данных сконфигурирован для сбора информации о препятствии, являющемся результатом обнаружения, при этом информация о препятствии является информацией о препятствиях, существующих вокруг транспортного средства; и
блок определения диапазона сконфигурирован для определения диапазона наблюдения так, что препятствия с высоким уровнем приоритета обнаружения предпочтительнее включаются в диапазон наблюдения по сравнению с препятствиями с низким уровнем приоритета обнаружения.
2. Бортовая сенсорная система по п. 1, в которой блок определения уровня приоритета сконфигурирован для того, чтобы в ситуации, когда препятствия включают первый неподвижный объект, который расположен выше транспортного средства, и второй неподвижный объект, который расположен на поверхности дороги, по которой движется транспортное средство, назначать более высокий уровень приоритета обнаружения для второго неподвижного объекта, чем для первого неподвижного объекта, исходя из взаимного положения первого неподвижного объекта и транспортного средства и взаимного положения второго неподвижного объекта и транспортного средства.
3. Бортовая сенсорная система по п. 1 или 2, в которой блок определения уровня приоритета, сконфигурированный для назначения более высокого уровня приоритета обнаружения для пешехода, если препятствия включают пешехода, в ситуации, когда блок определения уровня приоритета предполагает, что пешеход будет находиться по курсу транспортного средства, исходя из взаимного движения пешехода и транспортного средства, чем в ситуации, когда блок определения уровня приоритета не предполагает, что пешеход будет находиться по курсу транспортного средства.
4. Бортовая сенсорная система по п. 1 или 2, в которой:
первый датчик является радарным датчиком;
блок сбора данных сконфигурирован для сбора информации о цели в качестве информации о препятствии, при этом информация о цели является информацией о множестве целей, каждая из которых состоит из множества отражающих точек; и
блок определения уровня приоритета сконфигурирован для того, чтобы в случае, когда цели включают конкретную цель, назначать более высокий уровень приоритета обнаружения для конкретной цели, чем, по меньшей мере, для части целей, отличных от конкретной цели, причем конкретная цель является целью, соответствующей движущемуся объекту, скорость конкретной цели равна или меньше заранее заданной скорости, и эффективная отражающая площадь конкретной цели равна или меньше заранее заданной эффективной отражающей площади цели.
5. Бортовая сенсорная система по п. 1 или 2, в которой:
когда транспортное средство остановлено, по меньшей мере, часть доступного для наблюдения диапазона второго датчика отлична от диапазона обнаружения первого датчика; и
блок определения диапазона сконфигурирован для определения диапазона наблюдения таким образом, что препятствия с высоким уровнем приоритета обнаружения включаются в диапазон наблюдения в случае, если в первый момент времени препятствия высокого уровня приоритета обнаружения расположены вне доступного для наблюдения диапазона наблюдения, и во второй момент времени, который позже, чем первый момент времени, препятствия высокого уровня приоритета обнаружения находятся в доступном для наблюдения диапазоне.
6. Бортовая сенсорная система по п. 1 или 2, в которой блок определения уровня приоритета сконфигурирован для определения уровней приоритета обнаружения препятствий путем дополнительного использования картографической информации, соответствующей области, включающей, по меньшей мере, часть препятствий.
7. Бортовая сенсорная система по п. 1, в которой:
блок сбора данных сконфигурирован для сбора информации о полосе движения в качестве результата обнаружения, при этом информация о полосе движения является информацией о полосе движения перед транспортным средством; и
блок определения диапазона сконфигурирован для того, чтобы при обнаружении в информации о полосе движения того, что перед транспортным средством находится правоповоротная полоса движения и что транспортное средство вошло на правоповоротную полосу движения, определять диапазон наблюдения таким образом, чтобы область, которую пересекает транспортное средство, поворачивающее направо, была включена в диапазон наблюдения.
8. Бортовая сенсорная система по п. 1, в которой:
блок сбора данных сконфигурирован для сбора информации о дорожной обстановке в качестве результата обнаружения, при этом информация о дорожной обстановке является информацией о дорожной обстановке перед транспортным средством; и
блок определения диапазона сконфигурирован для того, чтобы при обнаружении из информации о дорожной обстановке уменьшения количества полос движения перед транспортным средством, определять диапазон наблюдения таким образом, чтобы в диапазон наблюдения была включена точка слияния полос движения, при этом точка слияния полос движения является точкой, в которой количество полос перед транспортным средством уменьшается.
9. Бортовая сенсорная система по п. 1, в которой:
блок сбора данных сконфигурирован для сбора информации о знаках в качестве результата обнаружения, при этом информация о знаках является информацией, по меньшей мере, об одном из дорожных знаков и дорожной разметки, существующих вокруг транспортного средства; и
блок определения диапазона сконфигурирован для определения диапазона наблюдения на основе информации о знаках.
10. Бортовая сенсорная система по п. 1, дополнительно содержащая блок управления, сконфигурированный для управления направлением излучения остронаправленного луча, причем:
второй датчик является датчиком, сконфигурированным для излучения остронаправленного луча;
блок сбора данных сконфигурирован для сбора информации о форме в качестве результата обнаружения, при этом информация о форме является информацией о форме препятствий, существующих вокруг транспортного средства;
блок определения диапазона, сконфигурированный для определения диапазона наблюдения на основе информации о форме; и
блок управления сконфигурирован для управления направлением излучения луча на основе информации о форме таким образом, что остронаправленный луч сканируется вдоль внешнего контура препятствий.
| US 10228457 B2, 12.03.2019 | |||
| JP 4665948 B2, 06.04.2011 | |||
| EP 1785743 B1, 05.10.2011 | |||
| СИСТЕМА ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ ВОКРУГ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2678909C2 |

