Область техники, к которой относится изобретение
Настоящее изобретение относится к системе граничного обнаружения для отслеживания перемещения объектов вне транспортного средства. В частности, система граничного обнаружения может отслеживать объекты вне транспортного средства для предупреждения пассажиров транспортного средства о потенциально угрожающих ситуациях.
Уровень техники
Пассажир транспортного средства может оказаться в ситуации, когда трудно точно отслеживать внешние события, которые могут происходить вне транспортного средства. В таких ситуациях пассажир может воспользоваться дополнительными вспомогательными средствами, которые будут наблюдать за событиями и объектами вне транспортного средства и выдавать уведомления пассажиру, находящемуся внутри транспортного средства.
Раскрытие изобретения
Объем изобретения определяется прилагаемой формулой изобретения. В описании аспекты кратко сформулированы аспекты вариантов осуществления изобретения, и оно не должно рассматриваться как ограничение притязаний. Следует понимать, что возможны другие варианты реализации технологии, описанной в настоящем документе, что будет очевидно специалисту в данной области техники после ознакомления с сопроводительными чертежами и подробным описанием, при этом предполагается, что данные варианты реализации включены в объем настоящей заявки.
Иллюстративные варианты осуществления относятся к системам и способам отслеживания объектов, находящихся снаружи транспортного средства, анализа отслеживаемого объекта для выявления потенциальной угрозы от отслеживаемого объекта для пассажиров транспортного средства, а также реагирования на угрозу на основании анализа для защиты пассажиров транспортного средства от отслеживаемого объекта.
В соответствии с некоторыми вариантами осуществления изобретения система граничного обнаружения транспортного средства включает в себя, по крайней мере, запоминающее устройство, выполненное с возможностью хранения информации, идентифицирующей выявленную угрозу; блок датчиков, выполненный с возможностью восприятия объекта вне транспортного средства и формирования сенсорной информации, исходя из параметров обнаруженного объекта; процессор, взаимодействующий с запоминающим устройством и блоком датчиков, причем процессор выполнен с возможностью получать информацию от датчиков и управлять реагированием на угрозу на основании информации от датчиков и/или информации, идентифицирующей угрозу.
В соответствии с некоторыми вариантами осуществления изобретения предложен способ обнаружения объектов в пределах ограниченной области вокруг транспортного средства, который включает в себя, по крайней мере, хранение на запоминающем устройстве информации, идентифицирующей угрозу, включая информацию для идентификации угрожающих ситуаций; восприятие блоком датчиков объекта, расположенного вне транспортного средства, а также формирование сенсорной информации, исходя из параметров обнаруженного объекта; получение процессором информации от датчиков; управление с помощью процессора реагированием на угрозу на основании информации от датчиков и/или информации, идентифицирующей угрозу.
Краткое описание чертежей
Для лучшего понимания изобретения оно будет описано со ссылкой на варианты осуществления, изображенные на следующих сопроводительных чертежах. Компоненты на чертежах необязательно выполнены с соблюдением масштаба, некоторые признаки могут быть опущены для более наглядного и четкого изображения отличительных признаков. Кроме того, компоненты системы могут быть расположены различным образом, как известно в данной области техники. На сопроводительных чертежах одинаковыми ссылочными позициями обозначены аналогичные детали, если не указано иное.
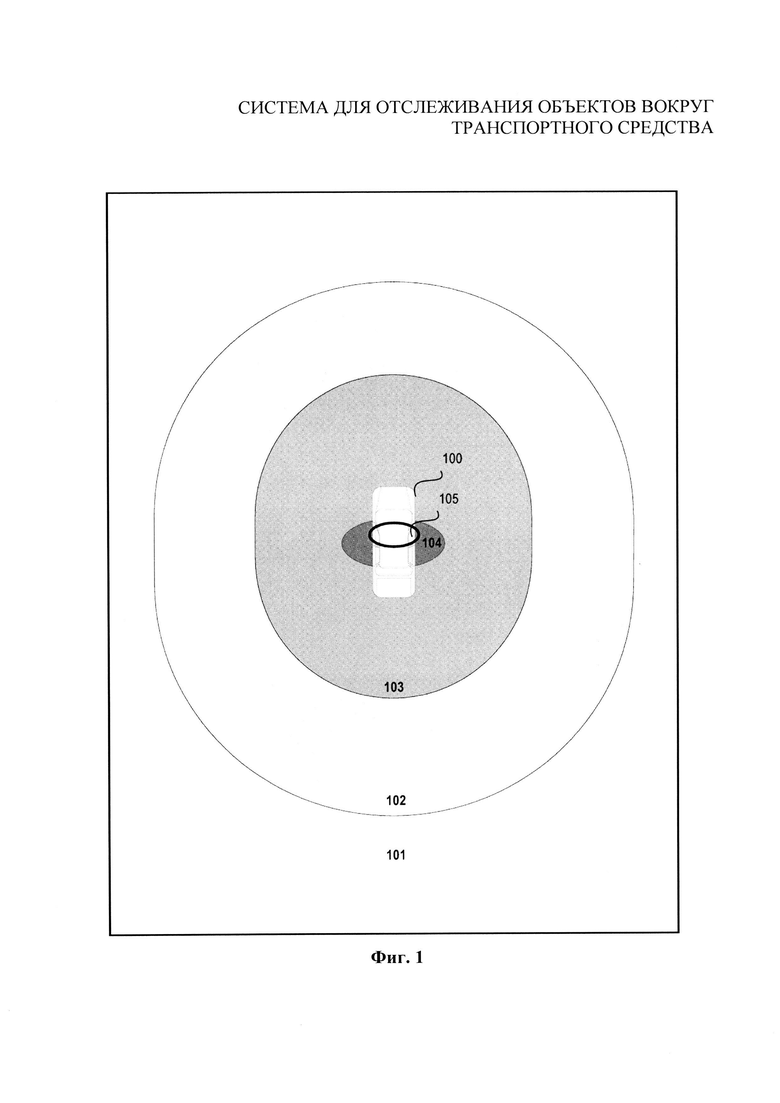
На Фиг. 1 представлено несколько зон граничного обнаружения вокруг транспортного средства.
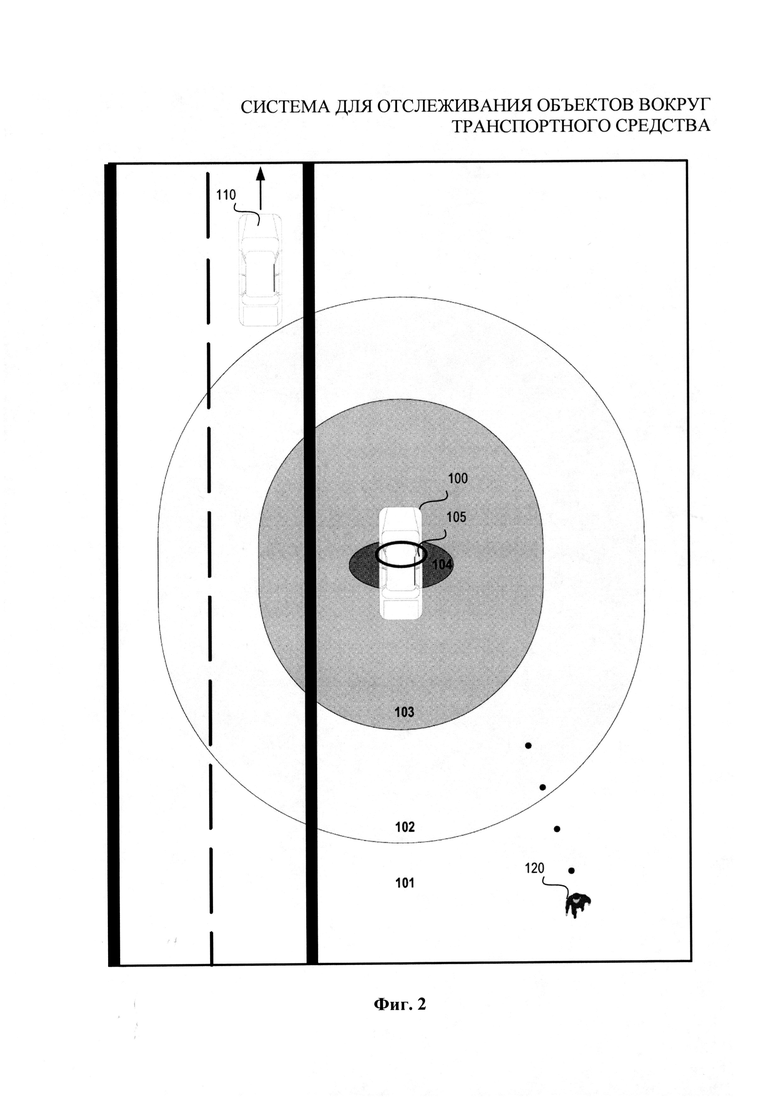
На Фиг. 2 представлен пример окружающего пространства при обнаружении угрозы, в соответствии с некоторыми вариантами осуществления изобретения.
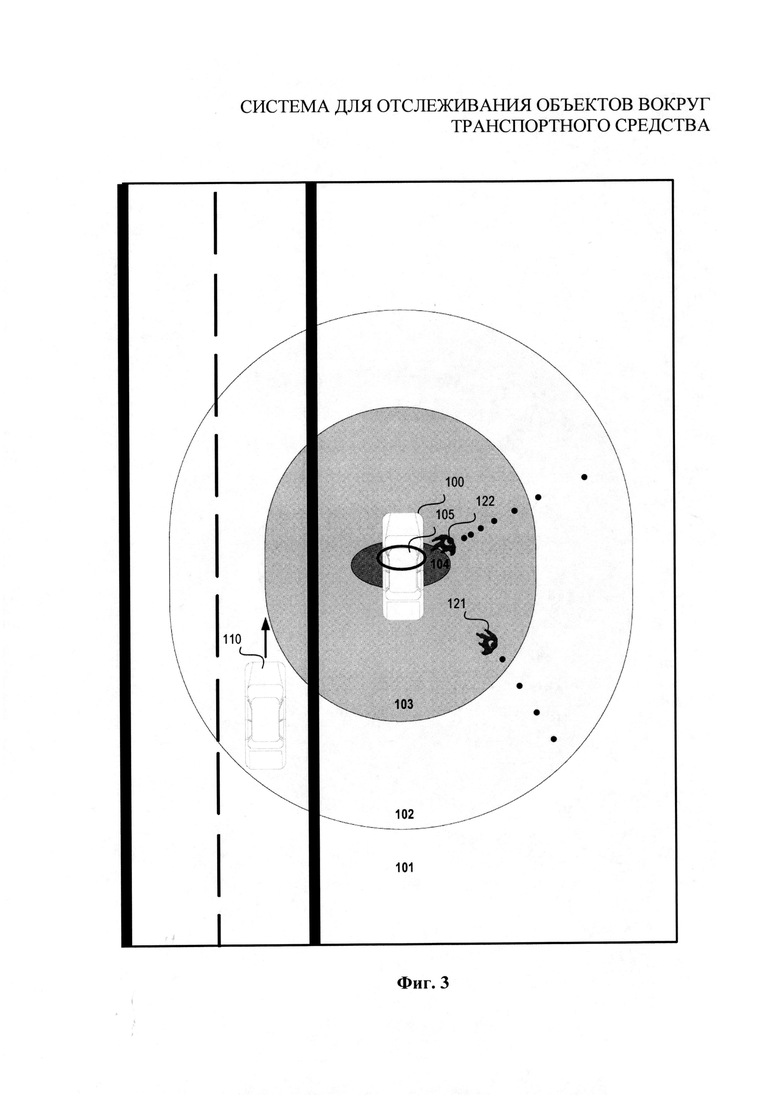
На Фиг. 3 представлен пример окружающего пространства при обнаружении угрозы, в соответствии с некоторыми вариантами осуществления изобретения.
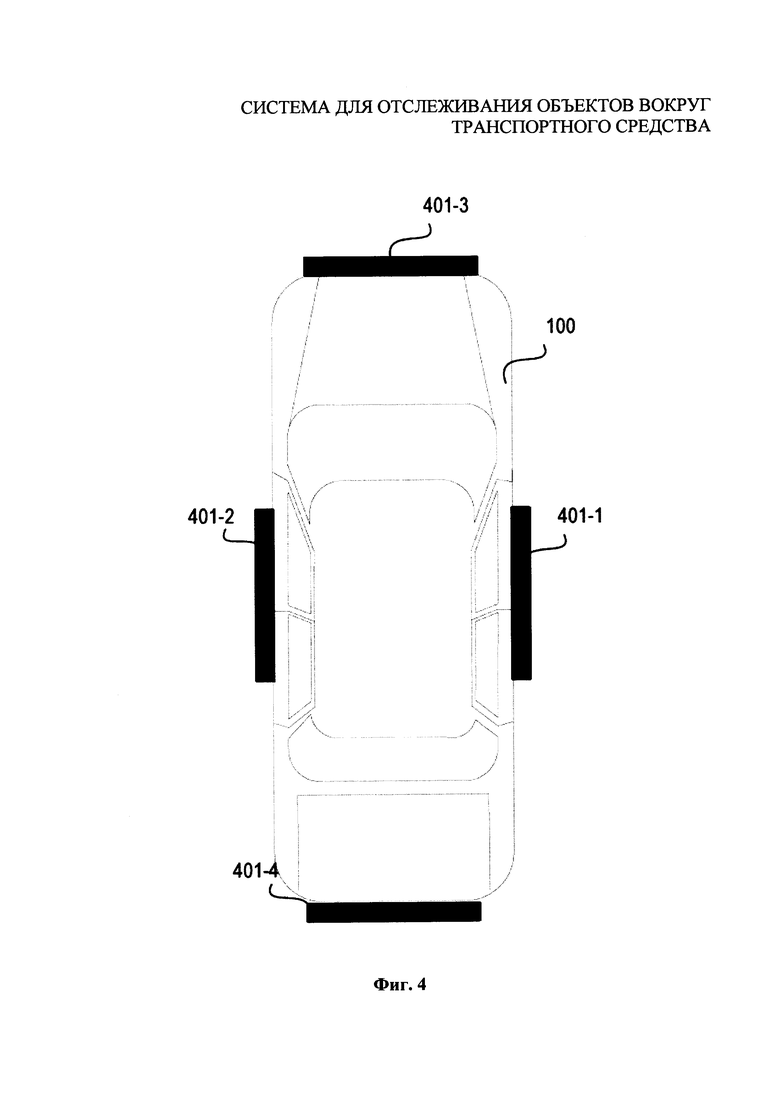
На Фиг. 4 представлен пример транспортного средства, оборудованного датчиками системы контурного обнаружения, в соответствии с некоторыми вариантами осуществления изобретения.
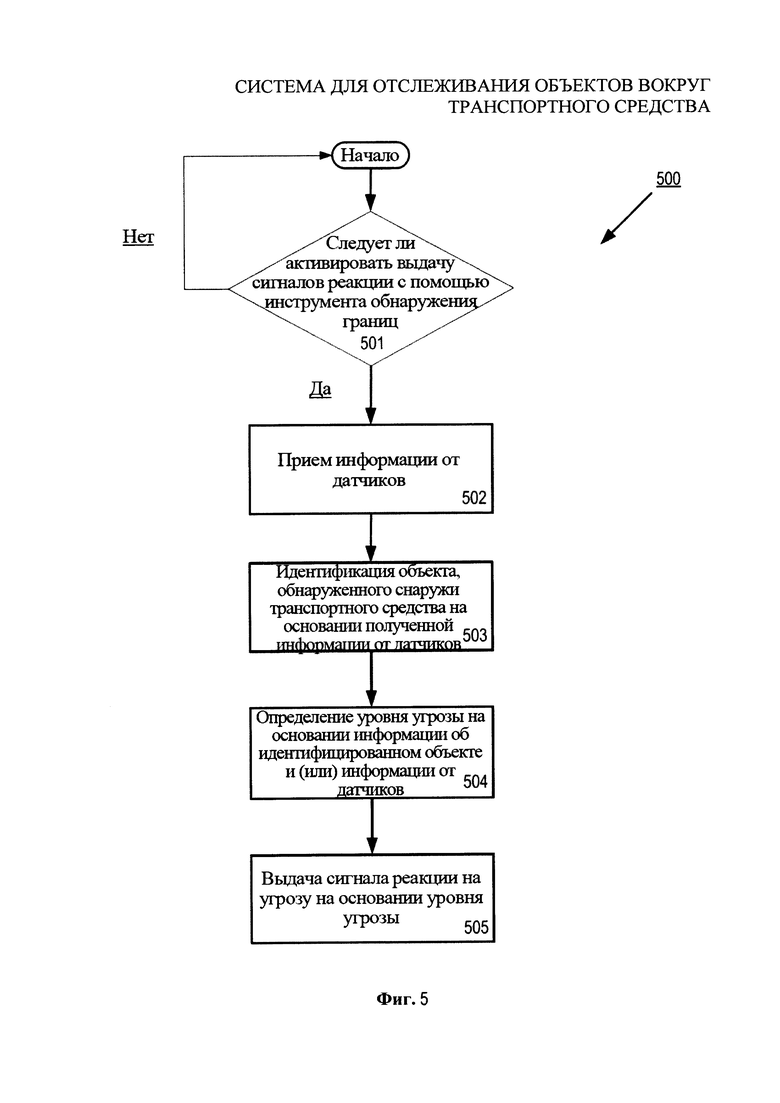
На Фиг. 5 представлен пример блок-схемы для способа согласно некоторым вариантам осуществления изобретения.
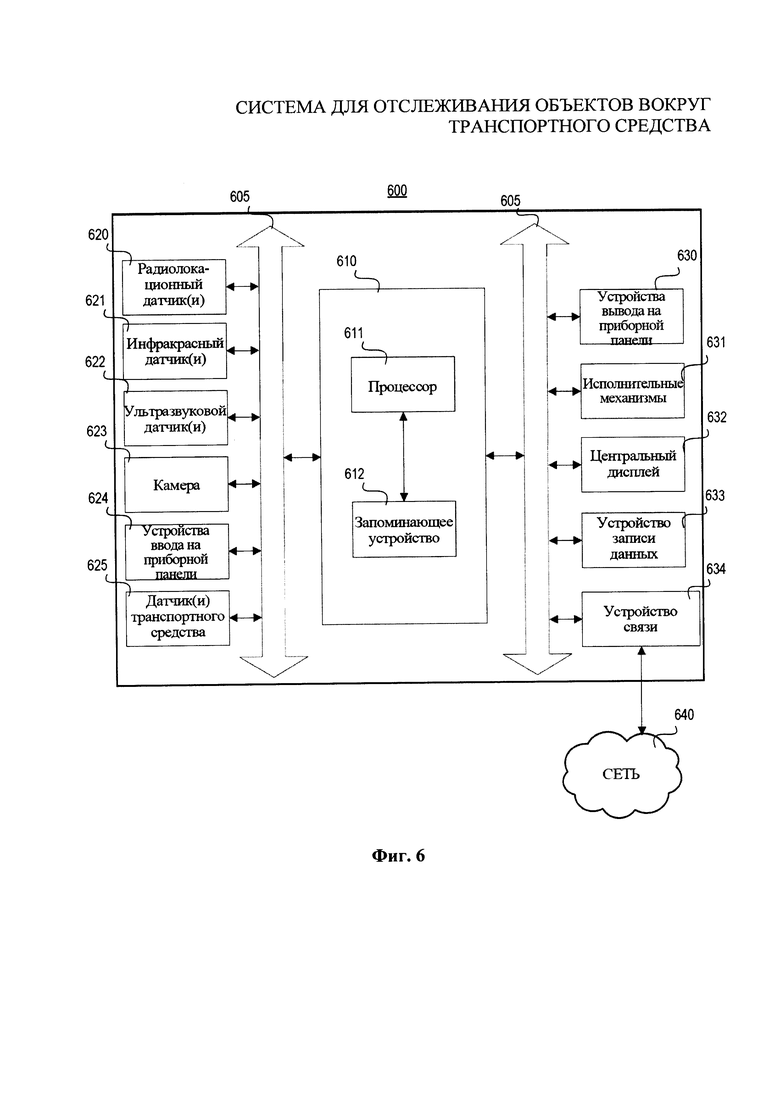
На Фиг. 6 представлен пример схемы, включающей в себя компоненты системы контурного обнаружения, в соответствии с некоторыми вариантами осуществления изобретения.
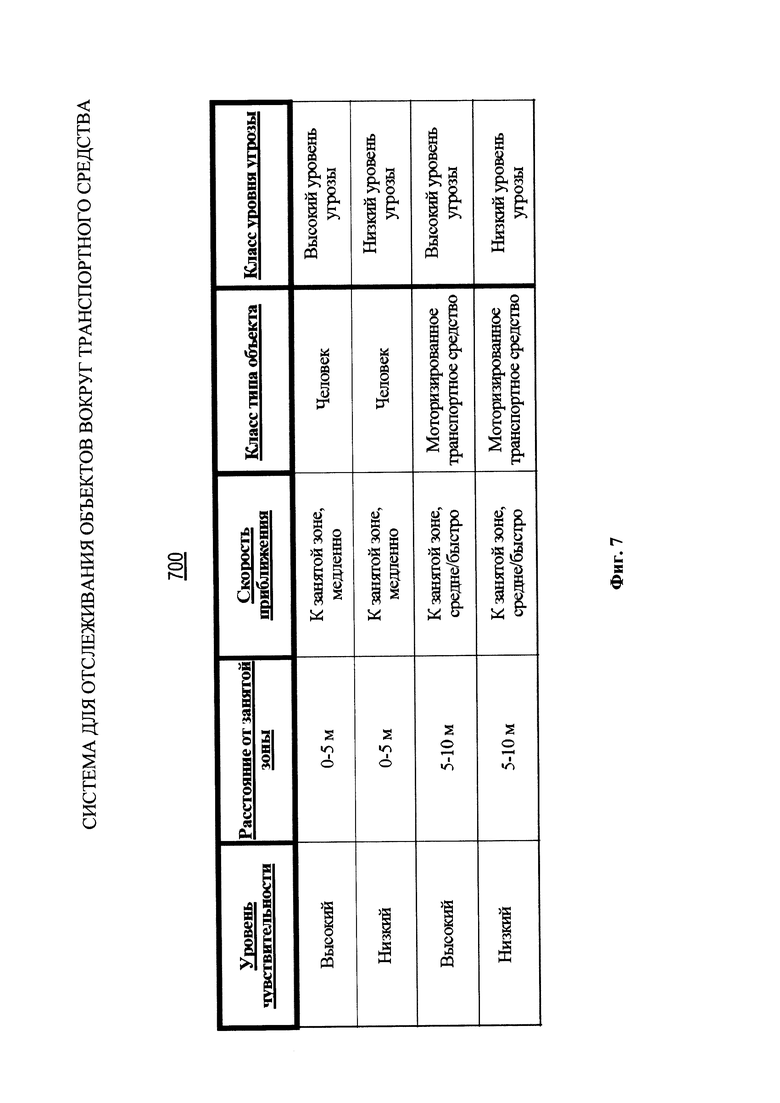
На Фиг. 7 представлен пример таблицы параметров в соответствии с некоторыми вариантами осуществления изобретения.
Осуществление изобретения
Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и будут описаны некоторые иллюстративные и неограничивающие варианты осуществления, понимая, что настоящее раскрытие следует рассматривать в качестве примера настоящего изобретения, а не ограничения изобретения конкретными показанными вариантами. Не все изображенные компоненты, описанные в настоящем описании, могут быть обязательными, при этом в некоторых вариантах применения могут использоваться дополнительные и альтернативные компоненты или другое количество компонентов, отличное от указанного в настоящем описании. В расположение и тип компонентов могут быть внесены изменения без отступления от сущности или объема притязаний, представленных в настоящем документе.
Для идентификации объектов, обнаруженных вокруг транспортного средства, определенные компоненты и системы могут быть установлены на транспортном средстве и/или в нем. За счет идентификации объектов, обнаруженных вокруг транспортного средства, может быть выполнен дальнейший их анализ для определения, представляют ли эти объекты угрозу безопасности одному или нескольким пассажирам транспортного средства. Например, в настоящем описании описана система граничного обнаружения, являющаяся элементом транспортного средства. Система граничного обнаружения можно использовать один или несколько компонентов, общих с одним или несколькими компонентами существующих систем транспортного средства. Система граничного обнаружения, в целом, состоит из одного или нескольких датчиков для обнаружения объектов, находящихся в непосредственной близости снаружи транспортного средства, запоминающего устройства для хранения информации, полученной от датчиков и информации, которая может быть использована в качестве базовой или опорной при определении ожидаемого уровня угрозы обнаруженного объекта пассажирам транспортного средства, и процессор для определения того, может ли объект создать угрожающую ситуацию для пассажиров транспортного средства, на основании полученной информации от датчиков и информации, хранящейся на запоминающем устройстве. Процессор также может быть выполнен с возможностью управлять другими функциями и/или компонентами транспортного средства для реагирования на угрозу на основании результатов определения того, представляет ли объект угрозу. Хотя было указано, что система граничного обнаружения состоит из одного или нескольких датчиков, запоминающего устройства и контроллера, в объем настоящего раскрытия также включены системы граничного обнаружения, включающие в себя большее или меньшее количество компонентов.
Система граничного обнаружения может быть использована, например, в потребительском пассажирском транспортном средстве, например, седане или грузовике. Система граничного обнаружения также может быть использована, например, на негражданском транспортном средстве, например, транспортном средстве, используемом силовыми структурами, правительственными организациями, аварийно-спасательными службами (например, пожарными), или службами медицинской помощи (например, больницами или станциями скорой помощи). Данный список не является исчерпывающим и предложен исключительно в целях пояснения. Отсюда следует, что транспортное средство, описанное в настоящем описании, может представлять собой как потребительское пассажирское транспортное средство, так и специализированное транспортное средство (например, полицейский автомобиль, пожарный автомобиль, автомобиль скорой помощи), используемое одной или несколькими службами, перечисленными выше.
Функции, процессы и способы, описанные в настоящем документе в отношении функциональных возможностей системы граничного обнаружения, могут быть реализованы с помощью инструмента граничного обнаружения, работающего в системе граничного обнаружения. Инструментом граничного обнаружения может быть программа, приложение и/или некоторое сочетание программных и аппаратных средств, встроенных в один или несколько компонентов, которые установлены в системе граничного обнаружения. Более подробно инструмент граничного обнаружения и система граничного обнаружения будут описаны ниже.
Кроме того, хотя транспортное средство и признаки, соответствующие инструменту граничного обнаружения и системы граничного обнаружения, описанные в настоящем документе, применимы в случае, когда транспортное средство находится в припаркованном (т.е. неподвижном) состоянии, также подразумевается, что данные признаки могут применяться и во время движения транспортного средства.
Нижеследующее описание представлено в отношении инструмента граничного обнаружения, идентифицирующего по крайней мере три различных класса уровней угрозы, которые могут быть присвоены объекту, обнаруженному вне транспортного средства 100. Эти три иллюстративных класса уровня угрозы - это класс «отсутствие угрозы», класс «низкий уровень угрозы» и класс «высокий уровень угрозы». В некоторых вариантах осуществления изобретения может быть использован класс «аварийный уровень угрозы», являющийся более серьезным по сравнению с классом «высокий уровень угрозы». Названия классов уровней угроз приведены в качестве примера, как это сделано в рамках инструмента граничного обнаружения для указания на большее или меньшее количество классов уровней угроз. Например, в некоторых вариантах инструмент граничного обнаружения может идентифицировать два обособленных класса уровней угроз: класс «низкой угрозы» и класс «высокой угрозы». В других вариантах инструмент граничного обнаружения может идентифицировать класс «отсутствие угрозы» как класс с самым низким уровнем угрозы, класс «высокая угроза» в качестве класса с самым высоким уровнем угрозы, а один или несколько классов уровней угрозы между ними для обозначения варьирующихся уровней угрозы между классом «отсутствие угрозы» и классом «высокая угроза».
На Фиг. 1 изображено транспортное средство 100, стационарно расположенное в области, которая включает в себя несколько зон уровней угрозы, окружающих транспортное средство 100. Дальняя зона 101 начинается на расстоянии, достаточно далеком от занятой зоны 105 (например, занятая зона 105 может представлять собой зону в транспортном средстве 100, где могут находиться пассажиры) транспортного средства 100 таким образом, что инструмент граничного обнаружения идентифицирует объекты в дальней зоне 101 как находящиеся вне релевантного диапазона. Например, дальняя зона 101 может начинаться на таком расстоянии от занятой зоны 105, где инструмент граничного обнаружения рассматривает объекты как представляющие небольшую угрозу или не представляющие угрозы для людей в занятой зоне 105. В качестве альтернативы или дополнения дальняя зона 101 может быть на расстоянии, которое соответствует максимальной дальности работы одного или нескольких датчиков, которые составляют систему граничного обнаружения. Отсюда следует, что объект, находящийся в дальней зоне 101, может быть рассмотрен инструментом граничного обнаружения как объект, которому нужно присвоить класс «отсутствие угрозы», на основании его расстояния от занятой зоны 105.
Следующая внутренняя зона после дальней зоны 101 и ближе к транспортному средству 100 - это средняя зона 102. Объект в средней зоне 102 можно отслеживать одним или несколькими датчиками, которые составляют систему граничного обнаружения. Например, расстояния от занятой зоны 105, которые составляют среднюю зону 102, могут соответствовать расстояниям, на которых инструмент граничного обнаружения определяет, что следует начать отслеживание объектов, которые могут представлять угрозу для пассажиров транспортного средства 100. В качестве альтернативы или дополнения внешняя граница средней зоны 102 может соответствовать расстоянию, которое соответствует максимальной дальности действия одного или нескольких датчиков, которые составляют систему граничного обнаружения.
Кроме того, объект, идентифицированный инструментом граничного обнаружения как находящийся на заранее заданном расстоянии от занятой зоны 105, чтобы быть локализованным в средней зоне 102, может быть сначала отнесен к классу «отсутствие угрозы» или классу «низкий уровень угрозы» на основании его расстояния от занятой зоны 105. Кроме того, другие факторы, учитываемые инструментом граничного обнаружения, могут увеличить класс уровня угрозы, присвоенный объекту, на класс с более высоким уровнем угрозы (например, с класса «низкий уровень угрозы» на класс «высокий уровень угрозы» или с класса «отсутствие угрозы» на класс «низкий уровень угрозы») или могут снижать класс уровня угрозы, присвоенный объекту (например, с класса «низкий уровень угрозы» на класс «отсутствие угрозы»). Однако только на основании местонахождения объект, обнаруженный в средней зоне 102, может быть изначально отнесен инструментом граничного обнаружения к классу «отсутствие угрозы» или «низкий уровень угрозы». Другие факторы, учитываемые инструментом граничного обнаружения, могут относиться к сенсорной информации об объекте, воспринятой одним или несколькими датчиками, включенными в систему граничного обнаружения (например, размер объекта, скорость движения объекта, ускорение объекта, прогнозируемое перемещение/путь/траектория/положение/местонахождение объекта или спрогнозированный тип объекта). Ниже приведено более глубокое описание дополнительных факторов, которые могут изменить уровень угрозы объекта.
Следующая внутренняя зона после средней зоны 102, ближе к транспортному средству 100 - это ближняя зона 102. Объект в ближней зоне 103 можно отслеживать одним или несколькими датчиками, которые составляют систему граничного обнаружения. Например, расстояния от занятой зоны 105, составляющие ближнюю зону 103, могут соответствовать расстояниям, на которых инструмент граничного обнаружения определяет, что следует начать отслеживание объектов, которые могут представлять угрозу для пассажиров транспортного средства 100.
Кроме того, объект, идентифицированный инструментом граничного обнаружения как находящийся на заранее заданном расстоянии от занятой зоны 105, чтобы быть локализованным в ближней зоне 103, может быть изначально отнесен инструментом граничного обнаружения к классу «низкий уровень угрозы». Другие факторы, учитываемые инструментом граничного обнаружения, могут увеличить класс уровня угрозы, присвоенный объекту, на класс с более высоким уровнем угрозы (например, с класса «низкий уровень угрозы» на класс «высокий уровень угрозы») или понизить класс уровня угрозы, присвоенный объекту, на класс с более низким уровнем угрозы (например, с класса «низкий уровень угрозы» на класс «отсутствие угрозы»). Однако только на основании местонахождения объект, обнаруженный в ближней зоне 103, может быть изначально отнесен инструментом граничного обнаружения к классу «низкий уровень угрозы». Ниже приведено более подробное описание дополнительных факторов, которые могут изменить уровень угрозы объекта.
Следующая зона внутрь после ближней зоны 103, ближе к транспортному средству 100 - это критическая зона 104. Объект в критической зоне 104 можно отслеживать одним или несколькими датчиками, которые составляют систему граничного обнаружения. Например, расстояния от занятой зоны 105, которые составляют критическую зону 104, могут соответствовать расстояниям, на которых инструмент граничного обнаружения определяет, что следует начать отслеживание объектов, которые могут представлять угрозу для пассажиров транспортного средства 100.
Как показано на Фиг. 1, в некоторых вариантах осуществления может быть определено, что критическая зона 104 включает в себя только те области, которые непосредственно примыкают к стороне водителя и стороне пассажира транспортного средства, поскольку они могут представлять собой область, где пассажиры транспортного средства 100 могут быть наиболее уязвимыми. Например, пассажирам может быть сложнее обнаружить объекты, движущиеся вдоль стороны водителя и стороны пассажира в транспортном средстве, (например, из-за наличия «слепых зон»), по сравнению с объектами, приближающимися с передней или задней стороны транспортного средства 100. В качестве альтернативы или дополнения, занятая зона 105 может включать в себя область в передней и задней части транспортного средства 100 таким образом, чтобы критическая зона 104 включала в себя область непосредственно вокруг транспортного средства 100. Так как критическая зона 104 является областью, расположенной ближе всего к занятой зоне 105 в транспортном средстве 100, объект, идентифицированный инструментом граничного обнаружения как находящийся на таком расстоянии от занятой зоны 105, чтобы быть локализованным в критической зоне 104, может быть изначально отнесен инструментом граничного обнаружения к классу «высокий уровень угрозы». Другие факторы, учитываемые инструментом граничного обнаружения, могут повысить класс уровня угрозы, присвоенный объекту, на класс с более высоким уровнем угрозы (например, с класса «высокий уровень угрозы» на класс с более высоким уровнем угрозы «аварийный уровень угрозы») или понизить уровень угрозы, присвоенный объекту, на класс с более низким уровнем угрозы (например, с класса «высокий уровень угрозы» на класс «низкий уровень угрозы»). Однако только на основании местонахождения объект, обнаруженный в критической зоне 104, может быть изначально отнесен инструментом граничного обнаружения к классу «высокий уровень угрозы». Ниже приведено более подробное описание дополнительных факторов, которые могут повлиять на уровень угрозы объекта.
Следующая зона после критической зоны 104 - это занятая зона 105. Занятая зона - это область в пределах транспортного средства 100, где, как может оценить инструмент граничного обнаружения, находятся люди в транспортном средстве 100. В качестве альтернативы или дополнения занятая зона 105 может соответствовать области внутри транспортного средства 100, где, как идентифицировал инструмент граничного обнаружения, находятся один или несколько человек в салоне транспортного средства 100, на основании сенсорной информации, полученной от одного или нескольких датчиков, которые составляют систему граничного обнаружения. Занятая зона идентифицирована как область, соответствующую пассажирам в транспортном средстве 100, и может рассматриваться инструментом граничного обнаружения как центральная точка, поскольку инструмент граничного обнаружения служит для информировании пассажиров транспортного средства о внешних воздействиях, которые могут быть важны для пассажиров. Например, инструмент граничного обнаружения может служить для предупреждения пассажиров транспортного средства 100 об объектах вне транспортного средства 100, которые инструмент граничного обнаружения отслеживал и определил, что они могут представлять угрозу для пассажиров.
Отсюда следует, что только на основании местонахождения объект, отслеживаемый снаружи транспортного средства 100 и затем обнаруженный в занятой зоне 105, может автоматически быть отнесен инструментом граничного обнаружения к классу максимального уровня угрозы. Ниже приведено более подробное описание дополнительных факторов, которые могут повлиять на уровень угрозы объекта.
Хотя на Фиг. 1 показано пять различных зон (дальняя зона, средняя зона, ближняя зона, критическая зона и занятая зона), такое количество зон приведено исключительно в качестве примера. Например, критическая зона 104 может быть включена в занятую зону 105 таким образом, что занятая зона может включать в себя область около дверей со стороны пассажира или водителя, область непосредственно вокруг транспортного средства 100 до заранее заданного расстояния или область в транспортном средстве 100, где, как определила или спрогнозировала система граничного обнаружения, находятся пассажиры. Таким образом, в рамках притязаний настоящего изобретения, инструмент граничного обнаружения может идентифицировать и основываться на меньшем или большем количестве зон, выполняя функции, описанные в настоящем документе. Кроме того, каждая зона, идентифицированная инструментом граничного обнаружения, может быть соотнесена им с одним или несколькими классами уровней угрозы, описанными в настоящем документе.
В качестве альтернативы или дополнения, хотя в описании использовано указание на объекты в пределах указанных «зон», в охват настоящего изобретения также включены ситуации, когда инструмент граничного обнаружения использует одно или несколько расстояний от занятой зоны 105 вместо «зон», упомянутых выше и в других местах в настоящем описании.
Ниже приведено описание обнаружения объектов вокруг транспортного средства 100, а также факторов, которые могут быть рассмотрены инструментом граничного обнаружения для повышения или понижения класса уровня угрозы, присвоенного объекту.
На Фиг. 2 показано окружающее пространство, в котором транспортное средство 100 находится в припаркованном состоянии на обочине дороги. Например, транспортное средство 100 может представлять собой полицейский автомобиль, припаркованный на обочине дороги для выполнения полицейских задач (например, остановки движения, наблюдения за движением и т.д.). В некоторых вариантах обнаружение транспортного средства 100, находящегося в припаркованном состоянии, может инициализировать выполнение инструментом граничного обнаружения своего анализа или активировать функцию реагирования на угрозу. Инструмент граничного обнаружения может идентифицировать транспортное средство 100 как находящееся в припаркованном состоянии, на основании того, что у транспортного средства 100 рычаг переключения передач находится в положении парковки, на основании входных сигналов от датчика движения, которые показывают, что транспортное средство 100 остановлено (даже когда трансмиссия транспортного средства 100 не находится в состоянии парковки), на основании входных сигналов от акселерометра, которые определяют, что транспортное средство 100 остановлено (даже когда трансмиссия транспортного средства 100 не находится в состоянии парковки), или на основании какого-либо их сочетания. В некоторых вариантах инструмент граничного обнаружения может работать в определенном качестве, когда транспортное средство 100 движется, пока один или несколько компонентов (например, датчиков) системы граничного обнаружения функционируют и получают информацию об окружении транспортного средства 100.
Окружающее пространство, показанное на Фиг. 2, включает в себя дальнюю зону 101, среднюю зону 102, ближнюю зону 103, критическую зону 104 и занятую зону 105, которые могут быть идентифицированы и использованы как базовые инструментом граничного обнаружения. Окружающее пространство также показано на Фиг. 2 как включающее в себя человека 120 (т.е. объект), уходящего из занятой зоны 105 в транспортном средстве 100. Показано, что человек 120 уходит из занятой зоны 105 медленным и равномерным шагом, что обозначено в виде следов, указывающих траекторию движения человека. Окружающее пространство с Фиг. 2 также включает в себя второе транспортное средство 110, движущееся от занятой зоны 105.
В окружающем пространстве с Фиг. 2 оба объекта (человек 120 и второе транспортное средство 110) находятся в дальней зоне 101. Отсюда следует, что система граничного обнаружения на транспортном средстве 100 обнаружит и человека 120, и второе транспортное средство 110 в дальней зоне 101 и направит информацию о местонахождении таких объектов инструменту граничного обнаружения, запущенному в системе граничного обнаружения. В некоторых вариантах дальняя зона 101 может по определению находиться за пределами дальности действия одного или нескольких датчиков, которые составляют систему граничного обнаружения. В таких вариантах по умолчанию может считаться, что человек 120 и второе транспортное средство 110 относятся к классу «отсутствие угрозы», поскольку они находятся на достаточно большом расстоянии от занятой зоны 105, что их невозможно обнаружить точно. В любом случае инструмент граничного обнаружения может получать информацию от датчиков и первоначально идентифицировать человека 120 и второе транспортное средство 110 как относящиеся к классу «отсутствие угрозы» на основании того, что человек 120 и второе транспортное средство 110 расположены на достаточно большом расстоянии от занятой зоны 105 и находятся в дальней зоне 101.
Как описано выше, инструмент граничного обнаружения может получать дополнительную информацию об объекте, когда датчики системы граничного обнаружения отслеживают объект. Например, датчики системы граничного обнаружения могут первоначально обнаружить объект в одной или нескольких зонах вокруг транспортного средства 100 (например, объекты на таком расстоянии от занятой зоны 105, при котором они находятся в средней зоне 102 и дальше в сторону к транспортному средству 100) и перейти к определению начального положения, скорости и размера (длины, ширины, высоты, эффективной площади отражения) объекта в зонах. После первоначального обнаружения объекта датчики системы граничного обнаружения могут продолжать отслеживать движение объекта (например, положение, скорость, ускорение) по мере перемещения объекта в одной или нескольких зонах. За счет направления информации об отслеживании объекта в инструмент граничного обнаружения, инструмент граничного обнаружения может затем генерировать расчеты для прогнозирования траектории (прогнозируемого дальнейшего местонахождения) объекта и прогнозировать будущее местонахождение или путь объекта в определенный момент в будущем.
Кроме того, инструмент граничного обнаружения может получить сенсорную информацию от датчиков системы граничного обнаружения для создания прогноза о классификации типа объекта. Например, информация от датчиков может предоставлять информацию об эффективной площади отражения, длине, ширине, скорости или форме объекта. Инструмент граничного обнаружения затем может рассматривать полученную информацию от датчиков совместно с информацией, описывающей характеристики, по которым можно отнести объект в отдельный класс типа. Затем на основании этого анализа инструмент граничного обнаружения может отнести объект к одному или нескольким подходящим классам типов. Примерами классов типов объектов могут служить «люди», «животные» (например, класс животных также может быть дополнительно разделен на подклассы «опасные животные» и «неопасные животные»), «моторизованные транспортные средства» (например, «автомобильные транспортные средства» также может быть дополнительно разделен на подклассы «пассажирские транспортные средства», «транспортные средства правительственных органов» и «грузовики большей грузоподъемности»), «немоторизованные транспортные средства», «неподвижные объекты» или «устройства с дистанционным управлением». Информация, соответствующая классификации типа объекта, может быть сохранена на запоминающем устройстве системы граничного обнаружения таким образом, чтобы она была доступна для инструмента граничного обнаружения. Классы типов, описанные выше, приведены в качестве примера, и в рамках настоящего изобретения инструмент граничного обнаружения может идентифицировать меньшее или большее количество классов типов при классификации типа объекта. Таким образом, обнаруженным объектом может быть человек, моторизованное транспортное средство, немоторизованное транспортное средство, животное, устройство с дистанционным управлением или иной обнаруживаемый объект.
В некоторых вариантах инструмент граничного обнаружения может распознать объект, отнесенный к определенному классу типа объекта, как дополнительно соответствующий определенному классу уровню угрозы. Например, объект, отнесенный к классу людей или классу моторизованных транспортных средств, может быть распознан инструментом граничного обнаружения и автоматически отнесен, по крайней мере, к классу «низкая угроза». Затем могут быть рассмотрены дополнительные факторы и информация, полученная инструментом граничного обнаружения, для того, чтобы оставить класс объекта «низкая угроза», повысить класс объекта на «высокая угроза» или на класс «отсутствие угрозы». В данном описании приведены дополнительные описания факторов и информации, используемой инструментом граничного обнаружения при изменении классификации уровня угрозы объекта.
Например, на Фиг. 3 показано окружающее пространство, где класс уровня угрозы объекта может быть повышен или понижен инструментом граничного обнаружения на основании сенсорной информации, полученной от датчиков системы граничного обнаружения, по мере отслеживания объекта в зонах вокруг транспортного средства 100.
На Фиг. 3 показаны три объекта в области вокруг транспортного средства 100. Эти три объекта включают в себя второе транспортное средство 110, находящееся в средней зоне 102 и движущееся в сторону ближней зоны 103, первого человека 121, идущего с постоянной скоростью по ближней зоне 103 в сторону критической зоны 104, и второго человека 122, в данный момент находящегося в критической зоне 104 и быстро перемещающегося к занятой зоне 105.
В некоторых вариантах и как описано выше инструмент граничного обнаружения может первоначально классифицировать объект в одной или нескольких зонах на основании информации о местонахождении, полученной от одного или нескольких датчиков, которые включены в систему граничного обнаружения. Например, инструмент граничного обнаружения может получить информацию от датчиков с подробными данными о положении второго транспортного средства 110 и определить, что второе транспортное средство 110 находится на таком расстоянии от занятой зоны 105, что попадает в среднюю зону 102. Инструмент граничного обнаружения может получить информацию от датчиков с подробными данными о положении первого человека 121 и определить, что первый человек 121 находится на таком расстоянии от занятой зоны 105, что попадает в ближнюю зону 103. Также инструмент граничного обнаружения может получить информацию от датчиков с подробными данными о положения второго человека 122 и определить, что второй человек 122 находится на таком расстоянии от занятой зоны 105, что попадает в критическую зону 104.
Кроме того, в некоторых вариантах инструмент граничного обнаружения может опираться на положение объекта в зоне и/или расстояние от объекта до занятой зоны 105 для дальнейшего присвоения объекту класса уровня угрозы. Например, инструмент граничного обнаружения также может отнести второе транспортное средство 110 к классу «отсутствие угрозы» или классу «низкая угроза» на основании того, что второе транспортное средство 110 находится на таком расстоянии от занятой зоны 105, что оно попадает в среднюю зону 102. Инструмент граничного обнаружения также может отнести первого человека 121 к классу «низкая угроза» на основании того, что первый человек 121 расположен на таком расстоянии от занятой зоны 105, что попадает в ближнюю зону 103. Также инструмент граничного обнаружения может отнести второго человека 122 к классу «высокая угроза» на основании того, что второй человек 122 находится на таком расстоянии от занятой зоны 105, что он попадает в критическую зону 104. В других вариантах инструмент граничного обнаружения может не присваивать объекту класс уровня угрозы на основании только результатов классификации положения объекта в идентифицируемой зоне.
Кроме того, в некоторых вариантах инструмент граничного обнаружения может опираться на информацию, полученную от одного или нескольких датчиков, которые составляют систему граничного обнаружения, для отнесения каждого из объектов к соответствующему классу типа объектов. Например, на основании полученной информации от датчиков инструмент граничного обнаружения может отнести второе транспортное средство 110 к классу типа моторизованных транспортных средств. Аналогичным образом на основании информации, полученной от одного или нескольких датчиков, которые составляют систему граничного обнаружения, инструмент граничного обнаружения может отнести первого человека 121 и второго человека 122 к классу типа людей. В некоторых вариантах инструмент граничного обнаружения может полагаться на классификацию типа объекта, присвоенный объекту, для дополнительного отнесения объекта к соответствующему классу уровню угрозы. Например, инструмент граничного обнаружения также может отнести второе транспортное средство 110 к классу «низкая угроза» на основании того, что второе транспортное средство идентифицировано и отнесено к классу типа моторизованных транспортных средств. В некоторых вариантах инструмент граничного обнаружения может не присваивать объекту класс уровня угрозы только на основании класса типа объекта, присвоенного объекту.
После определения первоначального положения объекта и/или класса типа объекта, присвоенного объекту, инструмент граничного обнаружения может продолжить получать информацию от датчиков по мере того, как они отслеживают объекты, находящиеся вокруг транспортного средства 100. На основании полученной информации от датчиков инструмент граничного обнаружения может определить траекторию или спрогнозированный путь объекта относительно занятой зоны 105. Например, на Фиг. 3 инструмент граничного обнаружения может определить, что второе транспортное средство 110 движется в направлении занятой зоны 105 и/или движется из внешней зоны (например, из средней зоны 102) в более внутреннюю зону (т.е. в ближнюю зону 103) ближе к занятой зоне 105. На основании определения того, что объект движется в сторону занятой зоны 105, инструмент граничного обнаружения может присвоить объекту класс с более высоким уровнем угрозы или рассматривать путь объекта к занятой зоне в качестве фактора, позволяющего сохранить присвоенный объекту класс уровня угрозы прежним или повысить его класс уровня угрозы. Примером этого может служить второе транспортное средство 110, первый человек 121 и второй человек 122, которые показаны на Фиг. 3, приближающимися к занятой зоне 105 и/или переходящими из внешней зоны в более внутреннюю зону ближе к транспортному средству 100 и занятой зоне 105. В таких случаях продвижение объекта в сторону занятой зоны 105 и/или из внешней зоны к более внутренней зоне может привести к тому, что инструмент граничного обнаружения присвоит этим объектам класс с более высоким уровнем угрозы или будет учитывать данный фактор для сохранения или повышения каждого из соответствующих присвоенных классов уровней угрозы.
В качестве альтернативы или дополнения инструмент граничного обнаружения может определить скорость приближения объекта относительно занятой зоны 105 на основании информации от датчиков системы граничного обнаружения. Скорость приближения может соответствовать скорости, ускорению, замедлению или другому параметру движения объекта, который может быть воспринят с помощью одного или нескольких датчиков системы граничного обнаружения. Скорость приближения может быть классифицирована, например, как быстрая, средняя, равномерная или низкая скорость приближения. Например, инструмент граничного обнаружения может анализировать информацию от датчиков для определения того, соответствует ли скорость приближения объекта к занятой зоне 105 ускорению объекта в направлении к занятой зоне и/или ускорению перемещения из внешней зоны к более внутренней зоне. В таких случаях, где определено, что объект движется с ускорением в сторону занятой зоны 105, инструмент граничного обнаружения может присвоить объекту класс с более высоким уровнем угрозы или рассматривать ускорение движения к занятой зоне в качестве фактора для повышения класса уровня угрозы, присвоенного объекту. Например, видно, что второй человек 122 быстро движется с ускорением к транспортному средству 100, на основании следов второго человека. В этом случае инструмент граничного обнаружения может рассматривать ускорение движения второго человека 122 к транспортному средству 100 как угрожающий маневр и присвоить второму человеку класс с более высоким уровнем угрозы или увеличить уровень угрозы.
Кроме того, инструмент граничного обнаружения может присвоить объекту класс с более низким уровнем угрозы или понизить класс уровня угрозы, назначенный объекту в том случае, когда инструмент граничного обнаружения проанализирует информацию, полученную от датчиков, и определит, что объект движется от занятой зоны 105 и/или переходит из внутренней зоны в более внешнюю зону относительно транспортного средства 100 и занятой зоны 105. Данная ситуация изображена на примере человека 120 с Фиг. 2, который удаляется от транспортного средства 100 и занятой зоны 105. Таким образом, анализ информации, полученной от датчиков, согласно которой объект движется от занятой зоны 105, может привести к тому, что инструмент граничного обнаружения присвоит объекту класс с более низким уровнем угрозы или будет учитывать данный фактор для сохранения или понижения уровня угрозы, назначенного объекту класса. Аналогичным образом анализ полученной сенсорной информации, инструментом граничного обнаружения, который определяет объект как ускоряющийся в сторону от занятой зоны 105 и/или ускоряется из внутренней зоны в более внешнюю зону, удаляясь от занятой зоны, может привести к тому, что инструмент граничного обнаружения присвоит объекту класс с более низким уровнем угрозы или будет рассматривать данный фактор для понижения класса уровня угрозы, присвоенного объекту.
В качестве альтернативы или дополнения инструмент граничного обнаружения также может получать информацию от датчиков и прогнозировать будущий путь отслеживаемого объекта (например, траекторию). Информация от датчиков, собираемая для определения прогнозируемого пути объекта, может включать в себя, не ограничиваясь этим, положение, последние положения, скорость, ускорение и аналогичные показатели для объекта. Когда обнаружено, что прогнозируемая траектория объекта приведет к столкновению с занятой зоной 105 и/или транспортным средством 100, инструмент граничного обнаружения может присвоить объекту класс с более высоким уровнем угрозы или рассмотреть данный фактор для повышения класса уровня угрозы, присвоенного объекту. Если инструмент граничного обнаружения определяет, что прогнозируемая траектория объекта не приведет к столкновению с транспортным средством 100, инструмент граничного обнаружения может присвоить объекту класс с более низким уровнем угрозы, рассмотреть фактор для сохранения присвоенного объекту класса уровня угрозы или рассмотреть фактор для понижения класса уровня угрозы, присвоенного объекту.
В качестве альтернативы или дополнения инструмент граничного обнаружения также может получать информацию от датчиков и генерировать прогнозируемое время удара/столкновения для отслеживаемого объекта (например, второго транспортного средства 110, первого человека 121 или второго человека 122) и занятой зоны 105 и/или транспортного средства 100. Информация о прогнозируемом времени удара может быть рассчитана инструментом граничного обнаружения на основании анализа одного или нескольких следующих параметров: положение, последние положения, скорость, ускорение и аналогичные показатели для объекта. На основании прогнозируемого времени до удара инструмент граничного обнаружения может присвоить объекту класс с более высоким уровнем угрозы или рассмотреть данный фактор для повышения класса уровня угрозы, присвоенного объекту, если прогнозируемое время до удара меньше заранее заданного периода времени. Кроме того, инструмент граничного обнаружения может присвоить объекту класс с более низким уровнем угрозы или рассмотреть фактор для сохранения класса уровня угрозы, присвоенного объекту, или рассмотреть фактор для понижения класса уровня угрозы, присвоенного объекту, если прогнозируемое время до удара превышает заранее заданный период времени.
На основании анализа одного или нескольких факторов, описанных выше (например, расстояние от объекта до занятой зоны 105 и/или текущее местонахождение объекта по зонам, класс типа объекта, прогнозируемый путь объекта, скорость приближения объекта к занятой зоне 105 или удаления от нее, прогнозируемое время столкновения объекта и занятой зоны 105 и/или транспортного средства 100), инструмент граничного обнаружения может генерировать класс уровня угрозы, присваиваемый объекту. Список факторов, приведенный выше, указан в качестве примера, и в объем настоящего изобретения также включены ситуации, когда инструмент граничного обнаружения может учитывать большее или меньшее количество факторов по сравнению с количеством факторов, чем конкретно описано.
Кроме того, инструмент граничного обнаружения также может корректировать класс уровня угрозы на основании одной или нескольких настроек уровня чувствительности. Уровень граничного обнаружения, например, может работать в соответствии с одной из двух настроек уровня чувствительности: высокой или низкой. Высокий уровень чувствительности может соответствовать повышенной чувствительности, которая предполагает применение более высокого уровня угрозы к атрибуту объекта или получаемой информации по сравнению с тем же самым атрибутом объекта или получаемой информацией при низком уровне чувствительности. На Фиг. 7 показана таблица 700, в которой определена разница в классах уровней угрозы, присваиваемых объекту на основании уровня чувствительности, при котором работает инструмент граничного обнаружения. Как показано на Фиг. 7, при прочих одинаковых условиях инструмент граничного обнаружения может присвоить объекту класс с высоким или более высоким уровнем угрозы, когда инструмент граничного обнаружения работает при высоком уровне чувствительности, в противоположность низкому уровню чувствительности. Например, хотя объект находится в 5 метрах от занятой зоны 105, это не может гарантировать «высокий уровень угрозы» при низком уровне чувствительности, однако при высоком уровне чувствительности инструмент граничного обнаружения может присвоить класс «высокий уровень угрозы», тому же самому объекту, расположенному в 5 метрах от занятой зоны 105.
В качестве альтернативы или дополнения при повышенной чувствительности высокого уровня чувствительности инструмент граничного обнаружения может категоризировать большее количество атрибутов объектов как классифицируемые с высоким или более высоким уровнем угрозы. Например, хотя в нормальных условиях (например, при невысоких уровнях чувствительности или при низком уровне чувствительности) инструмент граничного обнаружения может не рассматривать температуру объекта, а при более высоком уровне чувствительности инструмент граничного обнаружения может использовать датчики температуры для учета температуры объекта при определении общего класса уровня угрозы объекта.
Хотя в таблицу 700 включены примеры факторов (например, расстояние от занятой зоны, скорость приближения, класс типа объекта), которые могут учитываться инструментом граничного обнаружения при определении класса уровня угрозы объекту, в объем настоящего изобретения также включены ситуации, когда при определении класса уровня угрозы объекта инструмент граничного обнаружения может использовать меньшее или большее количество факторов, чем описано в настоящем документе.
Уровень чувствительности инструмента граничного обнаружения может быть выбран путем прямого ввода пассажиром данных для контроля уровня чувствительности в инструмент граничного обнаружения. В качестве альтернативы или дополнительно уровень чувствительности может быть изменен на основании инициирующего события чувствительности, распознанного инструментом граничного обнаружения на основании анализа полученной информации от датчиков. Инструмент граничного обнаружения может получать информацию от одного или нескольких датчиков системы граничного обнаружения. Например, если инструмент граничного обнаружения распознает, что человек в транспортном средстве 100 может быть занят (например, вводя команды в бортовой компьютер или иное аналогичное вычислительное устройство, являющееся частью транспортного средства 100 или системы граничного обнаружения), то инструмент граничного обнаружения может выбрать высокий уровень чувствительности. Дополнительно, инструмент граничного обнаружения может выбрать высокий уровень чувствительности, если инструмент граничного обнаружения распознает, что вокруг транспортного средства 100 находится определенное количество объектов (например, транспортное средство находится в многолюдной области). Кроме того, инструмент граничного обнаружения может использовать иные устройства транспортного средства 100 для распознавания ситуаций, в которых необходимо выбрать высокий уровень чувствительности. Например, инструмент граничного обнаружения может получать информацию о местонахождении от GPS-устройства транспортного средства для распознавания того, что транспортное средство 100 расположено в районе с более высоким уровнем преступности. В этом случае инструмент граничного обнаружения может выбрать состояние высокой чувствительности. Инструмент граничного обнаружения также может получать информацию о времени от устройства учета времени транспортного средства и распознавать такие временные характеристики, как время суток (например, до или после определенного времени), которое известно характеризуется более высоким уровнем преступности. В этой ситуации инструмент граничного обнаружения может выбрать состояние высокой чувствительности.
Аналогичным образом инструмент граничного обнаружения может анализировать информацию от датчиков и/или информацию от устройств транспортного средства для распознавания определенных ситуаций, в которых необходимо выбрать низкий уровень чувствительности. Например, инструмент граничного обнаружения может выбрать низкий уровень чувствительности, если инструмент граничного обнаружения распознает, что вокруг транспортного средства 100 находится большое количество объектов, чтобы ограничить количество ложных сигналов тревоги из-за увеличения количества обнаруживаемых объектов вокруг транспортного средства.
После определения класса уровня угрозы объекта система граничного обнаружения может выработать соответствующий выходной сигнал реакции на угрозу. Выходным сигналом реакции на угрозу может быть любое сочетание звуковых, визуальных или тактильных ответных сигналов системы граничного обнаружения и/или транспортного средства 100. Соответствующий выходной сигнал реакции на угрозу может контролироваться инструментом граничного обнаружения на основании класса уровня угрозы объекта. Список классов уровней угроз и соответствующая информация о выходных сигналах реакции на угрозу могут быть сохранены на запоминающем устройстве системы граничного обнаружения.
Например, инструмент граничного обнаружения может управлять типом выходного сигнала реакции на угрозу на основании класса уровня угрозы объекта. В некоторых вариантах для объекта с присвоенным классом уровня угрозы, который, по крайней мере, соответствует заданному уровню угрозы (например, низкой угрозе), может быть предусмотрен звуковой выходной сигнал реакции на угрозу. Например, если объекту присвоен класс «низкая угроза», то инструмент граничного обнаружения может управлять динамиком, чтобы он выдал пассажиру транспортного средства 100 предупреждение об отслеживаемом объекте. Если объекту присвоен класс «высокая угроза», то инструмент граничного обнаружения может выдать иную реакцию на угрозу (например, звуковое предупреждение человеку в транспортном средстве, звуковое предупреждение объекту вне транспортного средства 100 и/или вывод на дисплей предупреждения для человека внутри транспортного средства 100). Таким образом, инструмент граничного обнаружения может иметь заранее заданный набор правил, которые определяют необходимый выходной сигнал реакции на угрозу для идентифицированного класса уровня угрозы и класса типа объекта.
Некоторые из примеров выходных сигналов реакции на угрозу, которые могут соответствовать определенному классу уровня угрозы, включают в себя, не ограничиваясь этим, звуковой выходной сигнал предупреждения пассажиров транспортного средства 100, звуковой выходной сигнал предупреждения объекту, отслеживаемому системой граничного обнаружения вне транспортного средства 100, тактильный сигнал предупреждения людям в транспортном средстве 100 (например, вибрирующий компонент в сиденье (сиденьях) в салоне транспортного средства, на приборной панели или торпедо), или визуальное уведомление для человека в транспортном средстве 100 (например, предупредительное сообщение, флажок, всплывающий значок или иное условное обозначение для информирования человека об отслеживаемом объекте вне транспортного средства 100). В некоторых вариантах инструмент граничного обнаружения может активировать или деактивировать одно или несколько средств реагирования на угрозу (например, звуковых, визуальных, тактильных) на основании входного сигнала, полученного от пользователя, и/или на основании результатов определения, выполненного инструментом граничного обнаружения на базе входных сигналов, полученных от датчиков. Например, в некоторых вариантах пользователь может захотеть оставить низкий профиль, и, следовательно, отключить звуковой и/или тактильный виды реакции на угрозу, при этом оставив только визуальные выходные сигналы реакции на угрозу, выводимые инструментом граничного обнаружения. Разрешение только визуального режима для вывода сигналов реакции на угрозу может соответствовать определенному режиму (например, скрытному режиму) работы, используемому инструментом выдачи сигналов реакции на угрозу на основании полученного от пользователя входного сигнала или анализа входной информации, полученной от датчиков. В других вариантах пользователь может быть занят (например, управлением транспортным средством) или ему необходимо оставаться незаметным (например, необходимо сохранять незаметное положение на полицейском наблюдательном посту), и он не может глядеть на экран дисплея, на который выводятся визуальные типы выходных сигналов реакции на угрозу, и поэтому в этих вариантах пользователь может разрешить только звуковые и/или тактильные выходные сигналы реакции на угрозу. Отключение экрана дисплея для вывода сигналов реакции на угрозу может соответствовать определенному режиму (например, режиму управления транспортным средством или режиму темноты) работы, используемому инструментом выдачи сигналов реакции на угрозу на основании полученного входного сигнала от пользователя или анализа входной информации, полученной от датчиков.
В некоторых вариантах выходной сигнал реакции на угрозу может активировать или деактивировать один или несколько исполнительных механизмов транспортного средства в зависимости от результатов определении класса уровня угрозы объекта. Примеры исполнительных механизмов транспортного средства, которые могут быть активированы или деактивированы с помощью инструмента граничного обнаружения, включают в себя системы аварийной сигнализации транспортного средства, электрические дверные замки транспортного средства, электрические стеклоподъемники, сирены транспортного средства (например, сирены полицейских транспортных средств), габаритные огни транспортного средства (например, габаритные огни полицейских транспортных средств), аудио/радиосистему транспортного средства, дисплеи в кабине транспортного средства или систему зажигания транспортного средства.
В качестве альтернативы или дополнительно класс «высокая угроза» (например, «аварийный уровень угрозы») может привести к тому, что инструмент граничного обнаружения инициирует выдачу сигнала реакции на угрозу в виде сообщения о чрезвычайной ситуации на удаленный диспетчерский пункт. Диспетчерский пункт может представлять собой диспетчерский пункт полиции, другое полицейское транспортное средство или другое транспортное средство аварийно-спасательной службы оперативного реагирования. Путем передачи сообщения о чрезвычайной ситуации в диспетчерский пункт инструмент граничного обнаружения может запросить дополнительную помощь для людей, находящихся в транспортном средстве.
В качестве альтернативы или дополнения инструмент граничного обнаружения может инициировать реагирование на угрозу на основании инициирующего события, которое может не быть непосредственно связано с классом уровня угрозы объекта. Например, инструмент граничного обнаружения может идентифицировать в качестве инициирующего события для выдачи сигнала реакции на угрозу, например, обнаружение объекта в заранее заданной зоне; обнаружение объекта в пределах заранее заданного расстояния от занятой зоны 105 и/или транспортного средства 100; классификацию объекта как относящегося к заранее заданному типу; предсказание столкновения объекта с занятой зоной 105 и/или транспортным средством 100; предсказание столкновения объекта с занятой зоной 105 и/или транспортным средством 100 в течение заранее заданного периода времени; присвоение объекту класса с заранее заданным уровнем угрозы. В таких вариантах инструмент граничного обнаружения может инициировать выдачу одного или нескольких сигналов реакции на угрозу, описанных выше, в качестве соответствующего реагирования при распознавании определенного события, инициирующего выдачу сигнала реакции на угрозу. Перечень примеров событий, инициирующих выдачу сигнала реакции на угрозу, приведен в качестве примера, а настоящее изобретение также охватывает ситуации, когда инструмент граничного обнаружения может распознавать большее или меньшее количество типов событий, инициирующих выдачу сигнала реакции на угрозу.
В некоторых вариантах параметры инструмента граничного обнаружения, описанные в настоящем документе, могут быть модифицированы. Например, пользователь может изменить количество идентифицируемых зон; изменить классы уровней угрозы, соответствующие каждой идентифицируемой зоне; изменить классы уровней угрозы, соответствующие каждому типу объектов; изменить повышающий фактор для класса уровня угрозы, присвоенного объекту, в зависимости от входной информации от определенного датчика (например, изменить количество уровней угрозы, на которое повысится класс при обнаружении ускорения объекта в сторону к транспортному средству 100); изменить понижающий фактор для класса уровня угрозы объекта в зависимости от входной информации от определенного датчика (например, изменить количество уровней угрозы, на которое понижается класс при обнаружении ускорения объекта в сторону от транспортного средства 100); или изменить выходной сигнал реакции на угрозу, который соответствует данному классу уровня угрозы. Пользователь может вводить команды для модификации параметров инструмента граничного обнаружения через приборную панель, которая принимает входные сигналы от пользователя. В некоторых вариантах инструмент граничного обнаружения может не принимать изменения параметров, если пользователь не сможет предоставить правильную аутентификационную информацию. Этот перечень изменяемых параметров инструмента граничного обнаружения приведен только в качестве примера, и настоящее изобретение также охватывает ситуации, когда инструмент граничного обнаружения позволяет пользователю изменять большее или меньшее количество параметров, чем указано.
Что касается отображения на дисплее возможностей инструмента граничного обнаружения, то инструмент граничного обнаружения может управлять дисплейным блоком системы граничного обнаружения, чтобы отображать один или несколько наборов данных, полученных, сгенерированных или определенных инструментом граничного обнаружения, как описано в настоящем документе. Например, инструмент граничного обнаружения может управлять дисплейным блоком так, чтобы отображать образ области вокруг транспортного средства 100, аналогичной областям с Фиг. 1, 2 и 3. Как и в случаях с окружающим пространством с Фиг. 1, 2 и 3, инструмент граничного обнаружения может управлять дисплейным блоком так, чтобы отображать транспортное средство 100 одну или несколько зон (например, дальнюю зону, среднюю зону, ближнюю зону, критическую зону, занятую зону), окружающие объекты, которые были обнаружены и идентифицированы системой граничного обнаружения и инструментом граничного обнаружения (например, второе транспортное средство 110, первого человека 121, второго человека 122), и близлежащие дороги и другие особенности дорожного движения (например, знаки остановки, указатели дорожного движения). Инструмент граничного обнаружения также может управлять дисплейным блоком так, чтобы отображать любую часть полученной информации наложением на изображение окружающего пространства. Например, отображение окружающего пространства может включать в себя стрелки, показывающие прогнозируемую траекторию объекта, следы или идентификаторы в виде точек, которые показывают путь объектов с момента начала их отслеживания в зонах, информацию о скорости объекта, информацию об ускорении объекта, класс типа объекта или класс уровня угрозы объекта. Этот список данных, которые могут быть отображены инструментом граничного обнаружения на дисплейном блоке, приведен в качестве примера, и настоящее изобретение охватывает также ситуации, когда на таком дисплее может быть отображено больше или меньше информации.
Инструмент граничного обнаружения может генерировать изображение окружающего пространства на дисплее на основании одного или более из следующего: информации от датчиков, воспринятой одним или несколькими датчиками, которые составляют систему граничного обнаружения, информации от системы глобального позиционирования (GPS), сформированной с помощью GPS-системы, которая может являться частью системы граничного обнаружения, или информации о расположении на карте, сохраненной на запоминающем устройстве системы граничного обнаружения. Этот список данных, которые инструмент граничного обнаружения может использовать при генерировании изображения на дисплее, приведен в качестве примера, и настоящее изобретение охватывает также ситуации, когда инструмент граничного обнаружения может использовать больший или меньший объем информации при генерировании такого изображения на дисплее.
В некоторых вариантах инструмент граничного обнаружения может управлять устройством записи данных таким образом, чтобы начать запись информации от датчиков на основании заранее заданного события запуска записи. Если инструментом граничного обнаружения распознано событие запуска записи, инструмент граничного обнаружения может управлять устройством записи данных так, чтобы начать запись информации. Информацией, записываемой устройством записи данных, может быть информация от датчиков, например, данные об обнаруженном положении объекта, данные о скорости объекта, данные об ускорении объекта, записи объекта на видеокамеру или покадровое цифровое изображение объекта. Информацией, записываемой в устройстве записи данных, также может быть информация, сгенерированная инструментом граничного обнаружения на основании анализа информации, полученной от датчиков, например, класса типа объекта или класса уровня угрозы объекта. Этот список информации, которая может быть записана с помощью устройства записи данных, приведен в качестве примера, и настоящее изобретение охватывает также ситуации, когда устройство записи данных может записать большее или меньшее количество типов информации.
В некоторых вариантах может быть записан один или несколько типов информации в течение заранее заданного периода времени до того или после того, как будет распознано событие запуска записи. Например, инструмент граничного обнаружения может управлять устройством записи данных так, чтобы начать запись одного или нескольких типов информации в течение заданного периода времени (например, записывать информацию в течение 1 минуты) до и/или после того, как будет распознано событие запуска записи. В некоторых вариантах устройство записи данных может записать один или несколько типов информации в течение всего времени наличия заранее заданного события для запуска записи.
Инструмент граничного обнаружения может идентифицировать в качестве события запуска записи, например, обнаружение объекта в заранее заданной зоне; обнаружение объекта в пределах заранее заданного расстояния от занятой зоны 105 и/или транспортного средства 100; отнесение объекта к заранее заданному типу объекта; прогнозирование столкновения объекта с занятой зоной 105 и/или транспортным средством 100; прогнозирование объекта столкнется с занятой зоной 105 и/или транспортным средством 100 в течение заранее заданного периода времени; присвоение объекту заранее заданного уровня угрозы. Этот перечень событий для запуска записи приведен в качестве примера, и настоящее изобретение охватывает также ситуации, в которых инструмент граничного обнаружения может распознавать большее или меньшее количество типов событий запуска записи.
После сохранения информации в устройстве записи данных пользователь может получить доступ к этой информации путем ее считывания (например, путем удаления съемного запоминающего устройства записывающего устройства или путем загрузки информации по проводному или беспроводному интерфейсу передачи данных), копирования, просмотра или удаления информации из журналов записывающего устройства. В некоторых вариантах для доступа к информации, хранящейся на записывающем устройстве, пользователь может получить от инструмента граничного обнаружения запрос на ввод учетных данных.
В некоторых вариантах инструмент граничного обнаружения может определить, когда следует активировать выходные сигналы реакции на угрозу, на основании распознавания события, инициирующего выдачу выходного сигнала реакции. В таких вариантах датчики системы граничного обнаружения могут отслеживать и получать информацию об объекте от датчиков транспортного средства 100, а инструмент граничного обнаружения может выполнять функции, описанные в настоящем документе, но соответствующий выходной сигнал реакции на угрозу может быть задержан до тех пор, пока инструмент граничного обнаружения не распознает подходящее событие, инициирующее выдачу выходного сигнала реакции. Например, событие, инициирующее выдачу выходного сигнала реакции, может требовать, чтобы инструмент граничного обнаружения сначала определил, что транспортное средство 100 находится в припаркованном состоянии, и только потом активировал выдачу выходных сигналов реакции на угрозу. Инструмент граничного обнаружения может определить, что транспортное средство 100 находится в припаркованном состоянии, на основании информации, полученной от одного или нескольких датчиков системы граничного обнаружения, которые идентифицируют транспортное средство 100, как неподвижное или, по крайней мере, движущееся со скоростью ниже заранее заданной минимальной скорости. Инструмент граничного обнаружения также может определить, что транспортное средство 100 находится в припаркованном состоянии, на основании информации, полученной от транспортного средства 100, идентифицирующей, что трансмиссия транспортного средства 100 находится в состоянии парковки.
На Фиг. 4 показано транспортное средство 100 и набор датчиков, которые могут составлять систему граничного обнаружения, описанную в настоящем документе. Блок датчиков 401-1 на стороне пассажира может включать в себя один или несколько датчиков, которые выполнены с возможностью воспринимать объекты на стороне пассажира в транспортном средстве 100. Блок датчиков 401-2 на стороне водителя может включать в себя один или несколько датчиков, которые выполнены с возможностью воспринимать объекты на стороне водителя в транспортном средстве 100. Блок датчиков 401-3 на передней стороне может включать в себя один или несколько датчиков, которые выполнены с возможностью воспринимать объекты на передней стороне транспортного средства 100. Блок датчиков 401-4 на задней стороне может включать в себя один или несколько датчиков, которые выполнены с возможностью воспринимать объекты на задней стороне транспортного средства 100. Датчики, которые входят в блоки датчиков, могут представлять собой один или несколько следующих датчиков: радиолокационный датчик, ультразвуковой датчик, камеру, видеокамеру, инфракрасный датчик, лидарный датчик или другие аналогичные типы датчиков для обнаружения и отслеживания объекта, который может находиться снаружи транспортного средства. Таким образом система граничного обнаружения может обнаруживать и отслеживать объект снаружи транспортного средства 100. Хотя на Фиг. 4 показаны 4 отдельных блока датчиков (401-1, 401-2, 401-3 и 401 4), в соответствии с настоящим изобретением система граничного обнаружения может включать в себя меньшее или большее количество блоков датчиков. Например, в некоторых вариантах блоки датчиков могут быть расположены только на стороне пассажира и стороне водителя, так как может быть определено, что представляющие угрозу объекты в основном приближаются к транспортному средству с этих двух сторон.
Кроме того, один или несколько из блоков датчиков (401-1, 401-2, 401-3 и 401 4) или блок датчиков, не показанный отдельно на Фиг. 4, могут быть использованы для восприятия объектов, которые находятся выше или ниже транспортного средства 100.
На Фиг. 5 показана блок-схема 500 процесса выполнения одной или нескольких функций инструмента граничного обнаружения, рассмотренного в настоящем описании.
На этапе 501 определяют, следует ли активировать выходные сигналы реакции на угрозу с помощью инструмента граничного обнаружения. Определение того, следует ли активировать выходные сигналы реакция на угрозу, может быть выполнено в соответствии с любым одним или несколькими способами, описанными выше в настоящем описании. Например, инструмент граничного обнаружения может определить, распознано ли необходимое событие начала выдачи выходного сигнала реакции (например, определяет, припаркован ли транспортное средство) на основании информации от датчиков, полученной инструментом граничного обнаружения. Если инструмент граничного обнаружения определяет, что не следует активировать выходные сигналы реакции на угрозу, то процесс возвращается в начало и циклически выполняет этап 501 до тех пор, пока инструментом граничного обнаружения не будут распознаны необходимые условия для активации выдачи выходных сигналов реакции на угрозу.
Однако если инструмент граничного обнаружения определит на этапе 501, что необходимые условия соблюдены, то процесс переходит на этап 502, где инструмент граничного обнаружения получает информацию от одного или нескольких датчиков, составляющих систему граничного обнаружения. Информация от датчиков может касаться обнаружения и отслеживания объекта снаружи транспортного средства. В настоящем тексте приведены описания системы граничного обнаружения, получающей информацию от одного или нескольких датчиков. Датчики, которые могут быть включены в систему граничного обнаружения, также описаны по тексту документа. Например, примеры датчиков были приведены выше со ссылкой на Фиг. 4 и описаны более подробно ниже со ссылкой на Фиг. 6.
На этапе 503 инструмент граничного обнаружения может анализировать полученную информацию от датчиков и идентифицировать объект, который был обнаружен датчиками. Например, инструмент граничного обнаружения может анализировать полученные входные сигналы от датчиков и отнести объект к одному или нескольким классам типа объекта в соответствии с одним или несколькими описанными выше способами. Также на этапе 503 инструмент граничного обнаружения может анализировать дополнительную информацию от датчиков для определения расстояния до объекта от занятой зоны транспортного средства, прогнозировать путь объекта, определять скорость приближения объекта к занятой зоне и/или транспортному средству или прогнозировать время до столкновения объекта с занятой зоной и/или транспортным средством.
На этапе 504 инструмент граничного обнаружения может определить класс уровня угрозы для объекта на основании класса типа объекта, определенного на этапе 503, и/или анализа дополнительной информации, полученной от одного или нескольких датчиков системы граничного обнаружения. Более подробное описание определения класса уровня угрозы для объекта приведено выше. Инструмент граничного обнаружения может определить класс уровня угрозы, присваиваемый объекту, в соответствии с одним или несколькими описанными выше способами. Кроме того, инструмент граничного обнаружения также может повысить, сохранить или понизить класс уровня угрозы, присвоенный ранее объекту, на основании класса типа объекта и/или анализа дополнительной информации от датчиков в соответствии с одним или несколькими описанными выше способами.
На этапе 505 инструмент граничного обнаружения может осуществить выдачу надлежащего выходного сигнала реакции на угрозу на основании класса уровня угрозы объекта, присвоенного объекту на этапе 504. Инструмент граничного обнаружения может выдать необходимый выходной сигнал реакции на угрозу в соответствии с одним или несколькими описанными выше способами.
Процесс, описанный в блок-схеме 500, приведен исключительно в качестве примера. Принцип работы инструмента граничного обнаружения по изобретению охватывает также выполнение одной или нескольких функций, процессов и способов, описанных в настоящем описании, посредством осуществления способа, который может включать в себя меньшее или большее количество этапов по сравнению с приведенным на блок-схеме 500. Например, в некоторых вариантах процессы, описанные для этапа 501, могут быть необязательными, и инструмент граничного обнаружения может их не выполнять. В дополнение, инструмент граничного обнаружения необязательно должен выполнять этапы в соответствии с порядком, приведенным на блок-схеме 500, для достижения таких же или аналогичных результатов.
На Фиг. 6 показан пример системы 600 граничного обнаружения, которая может быть использована для одного или нескольких компонентов системы граничного обнаружения, описанной в настоящем описании, или в любой другой системе, выполненной с возможностью выполнения способов и функций, рассмотренных выше.
Система 600 граничного обнаружения может включать в себя набор команд, которые могут быть выполнены для того, чтобы система 600 граничного обнаружения выполнила любой один или несколько способов, процессов или функций, описанных в данном описании. Например, блок обработки 610 может включать в себя процессор 611 и запоминающее устройство 612. Инструментом граничного обнаружения, рассмотренным в настоящем описании, может быть программа, которая состоит из набора команд, сохраненных на запоминающем устройстве 612, которые выполняет процессор 611 для того, чтобы инструмент граничного обнаружения и система 600 граничного обнаружения выполнили любой один или несколько способов, процессов или функций, описанных в данном описании.
Система 600 граничного обнаружения также может включать в себя компоненты ввода данных в систему, которые включают в себя, не ограничиваясь этим, радиолокационный датчик (датчики) 620, инфракрасный датчик (датчики) 621, ультразвуковой датчик (датчики) 622, камеру 623 (которая может захватывать цифровые фотографические изображения, потоковое видео и цифровое видео), устройства 624 ввода на приборной панели и датчик (датчики) 625 транспортного средства. Система 600 граничного обнаружения может получать входную информацию от одного или нескольких из этих компонентов ввода данных в систему. Кроме того, также входит в состав предложенной концепции система 600 граничного обнаружения, которая получает входную информацию от другого компонента, который явно не указан на Фиг. 6, например, лидарного датчика, или других технологий получения изображений. Компоненты ввода, взаимодействуют с блоком обработки 610 через шину связи 605. В некоторых вариантах система 600 граничного обнаружения может включать в себя дополнительный шлюзовый модуль (явно не показан) между компонентами ввода данных в систему и блоком обработки 610 для обеспечения лучшей связи между ними. Входные данные в инструмент граничного обнаружения и систему граничного обнаружения, описанные в настоящем описании, могут быть введены с помощью одного или нескольких компонентов ввода данных в систему, описанных в настоящем описании.
Система 600 граничного обнаружения также может включать в себя компоненты вывода системы, такие как устройства 630 вывода на приборной панели, исполнительные механизмы 631, центральный дисплей 632 и записывающее устройство 633. Компоненты вывода системы взаимодействуют с блоком обработки 610 через шину связи 605. Выходные сигналы от инструмента граничного обнаружения и системы граничного обнаружения, описанные в настоящем описании, могут быть реализованы в соответствии с описанием одного или нескольких компонентов ввода данных в систему, приведенным в настоящем описании. Например, выходные сигналы реакции на угрозу могут быть могут быть реализованы в соответствии с описанием одного или нескольких компонентов вывода системы, приведенным в настоящем описании. Хотя это явно не показано, система 600 граничного обнаружения также может включать в себя динамики для вывода звуковых сигналов тревоги. Динамики могут быть встроены в приборную панель или в другие подсистемы транспортного средства, например, информационно-развлекательную систему.
Система 600 граничного обнаружения, показанная на Фиг. 6, также включает в себя устройство связи 634. Устройство связи 634 может состоять из сетевого интерфейса (проводного или беспроводного) для связи с внешней сетью 640. Внешняя сеть 640 может представлять собой набор из одной или нескольких сетей, включая сети на базе стандартов (например, 2G, 3G, 4G, универсальная система мобильной связи (UMTS), ассоциация GSM (R), стандарт «Долгосрочное развитие» (LTE), (ТМ) и т.д.), WiMAX, Bluetooth, беспроводная связь ближнего действия (NFC), Wi-Fi (включая 802.11 a/b/g/n/ac или другие), WiGig, сети системы глобального позиционирования (GPS) и другие сети, существующие на момент подачи данной заявки или которые могут быть разработаны в будущем. Кроме того, сетью (сетями) может быть публичная сеть, например, Интернет, частная сеть, например, интранет, или их сочетания, при этом в такой сети (сетях) может быть использован ряд сетевых протоколов, которые существуют в настоящее время или будут разработаны в будущем, включая, но не ограничиваясь этим, сетевые протоколы на основании TCP/IP.
В соответствии с некоторыми вариантами осуществления изобретения программа, которая представляет собой инструмент граничного обнаружения, может быть загружена и сохранена на запоминающем устройстве 612 посредством передачи данных по сети 640 от удаленного сервера. Кроме того, в некоторых вариантах инструмент граничного обнаружения, запущенный в системе 600 граничного обнаружения, может обмениваться данными с центральным сервером системы управления через сеть 640. Например, инструмент граничного обнаружения может передавать информацию, полученную от датчиков системы 600 граничного обнаружения, в сервер диспетчерского пункта путем управления устройством связи 634 для передачи информации на сервер диспетчерского пункта через сеть 640. Инструмент граничного обнаружения также может передавать любое одно или несколько из сгенерированных данных (например, класс типа объекта или класс уровня угрозы) на диспетчерского пункта. Инструмент граничного обнаружения также может передавать данные, записанные в записывающем устройстве 633, как приведено в настоящем описании, на сервер диспетчерского пункта управляя записанными данными так, чтобы передать их через устройство связи 634 на сервер диспетчерского пункта через сеть 640. В ответ на это сервер диспетчерского пункта может передавать ответную информацию обратно в инструмент граничного обнаружения через сеть 640, где ответная информация получена устройством связи 634.
Следует понимать, что любые описания способа, блоков или этапов на сопроводительных чертежах представляют собой модули, сегменты или части программного кода, которые включают в себя одну или несколько исполняемых команд для осуществления определенных логических функций или этапов в процессе, и в объем описанных в настоящем документе вариантов осуществления включены альтернативные варианты, в которых функции могут быть выполнены в порядке, отличном от показанного или рассмотренного, включая практически одновременное выполнение или выполнение в обратном порядке, в зависимости от принципа работы, что очевидно для специалистов в данной области техники.
Следует подчеркнуть, что описанные выше варианты осуществления, в частности, любые «предпочтительные» варианты, представляют собой возможные примеры осуществления, изложенные исключительно для наглядного понимания принципов изобретения. Без существенного отступления от сущности и принципов работы, описанных в настоящем документе, в описанном выше варианте (вариантах) могут быть выполнены различные изменения и модификации. Все такие модификации включены в объем настоящего изобретения и защищены прилагаемой формулой изобретения.
Изобретение относится к вспомогательным системам автомобиля. Система граничного обнаружения для транспортного средства содержит запоминающее устройство, блок датчиков, процессор. Процессор определяет уровень угрозы, выбирает уровень чувствительности и управляет реакцией на угрозу на основании по меньшей мере одного из информации датчиков или информации идентификации угрозы и повышает уровень угрозы для объекта, когда уровень чувствительности высокий. Процессор дополнительно выполнен с возможностью анализировать информацию датчиков, определять уровень угрозы для объекта на основании информации датчиков и информации идентификации угрозы и управлять реакцией на угрозу на основании уровня угрозы. Процессор также может анализировать информацию датчиков для определения расстояния до объекта от транспортного средства, определения скорости приближения объекта к транспортному средству и определения уровня угрозы для объекта на основании расстояния до объекта от транспортного средства и скорости приближения объекта. Достигается повышение безопасности транспортного средства. 2 н. и 18 з.п. ф-лы, 7 ил.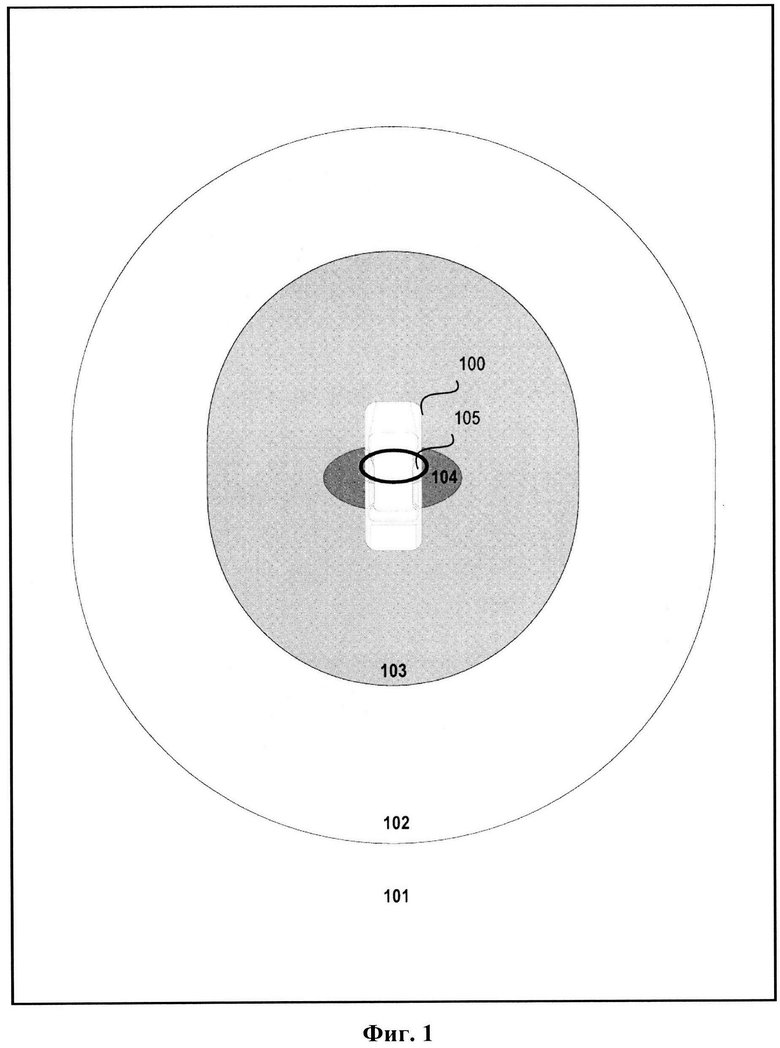
1. Система граничного обнаружения для транспортного средства, содержащая:
запоминающее устройство, хранящее информацию идентификации угрозы;
блок датчиков, получающий информацию датчиков об обнаруженном объекте;
процессор, определяющий уровень угрозы, выбирающий уровень чувствительности и управляющий реакцией на угрозу на основании по меньшей мере одного из информации датчиков или информации идентификации угрозы и повышающий уровень угрозы для объекта, когда уровень чувствительности высокий,
при этом процессор дополнительно выполнен с возможностью:
анализировать информацию датчиков,
определять уровень угрозы для объекта на основании информации датчиков и информации идентификации угрозы, и
управлять реакцией на угрозу на основании уровня угрозы,
при этом процессор выполнен с возможностью анализировать информацию датчиков, чтобы:
определять расстояние до объекта от транспортного средства на основании анализа информации датчиков,
определять скорость приближения объекта к транспортному средству на основании анализа информации датчиков, и
при этом процессор дополнительно выполнен с возможностью определять уровень угрозы для объекта на основании расстояния до объекта от транспортного средства и скорости приближения объекта.
2. Система граничного обнаружения для транспортного средства по п. 1, в которой процессор дополнительно выполнен с возможностью:
повышать уровень угрозы, когда анализ информации датчиков идентифицирует объект как находящийся на заданном расстоянии от транспортного средства или определяет, что скорость приближения объекта к транспортному средству превышает заданное пороговое значение скорости,
при этом блок датчиков включает в себя по меньшей мере одно из радарного датчика, ультразвукового датчика, лидарного датчика, инфракрасного датчика или камеры.
3. Система граничного обнаружения для транспортного средства по п. 1, в которой процессор выполнен с возможностью анализировать информацию датчиков, чтобы:
определять прогнозируемое будущее местоположение объекта на основании информации датчиков;
определять, прогнозируется ли, что объект столкнется с транспортным средством на основании прогнозируемого будущего местоположения объекта; и
повышать уровень угрозы объекта, если определено столкновение с транспортным средством в предсказанном будущем местоположении объекта.
4. Система граничного обнаружения для транспортного средства по п. 1, в которой процессор выполнен с возможностью анализировать информацию от датчиков для того, чтобы:
определять прогнозируемое будущее местоположение объекта на основании информации датчиков;
определять, прогнозируется ли, что объект столкнется с транспортным средством на основании прогнозируемого будущего местоположения объекта;
определять расчетное время до столкновения объекта с транспортным средством на основании того, прогнозируется ли, что объект столкнется с транспортным средством, и
повышать уровень угрозы объекта, если расчетное время до столкновения меньше заданного времени.
5. Система граничного обнаружения для транспортного средства по п. 1, в которой процессор дополнительно выполнен с возможностью:
определять местоположение объекта относительно транспортного средства, и
классифицировать объект как находящийся в одной из по меньшей мере трех зон обнаружения угрозы, которые включают в себя дальнюю зону, ближнюю зону и занятую зону,
при этом занятая зона находится внутри транспортного средства, при этом ближняя зона включает в себя по меньшей мере расстояние между занятой зоной и дальней зоной, где блок датчиков считывает объект, и дальняя зона находится дальше от занятой зоны, чем ближняя зона;
при этом процессор выполнен с возможностью классифицировать объект в класс высокой угрозы, когда принятая информация датчиков идентифицирует объект как расположенный в пределах заданного расстояния от занятой зоны.
6. Система граничного обнаружения для транспортного средства по п. 1, в которой процессор дополнительно выполнен с возможностью:
анализировать принятую информацию датчиков;
определять, распознано ли событие запуска записи, на основании упомянутого анализа; и
заставлять блок записи записывать информацию датчиков, когда событие запуска записи распознано из упомянутого анализа.
7. Система граничного обнаружения для транспортного средства, содержащая:
транспортное средство, содержащее запоминающее устройство, датчики расстояния и процессор, выполняющий программу граничного обнаружения, сконфигурированную для, при обнаружении парковки транспортного средства:
определения скорости и ускорения обнаруженного объекта относительно транспортного средства;
определения чувствительности на основании обнаруженной занятости человека в транспортном средстве;
определения уровня угрозы на основании скорости, ускорения, чувствительности и положения для обнаруженного объекта;
инициирования реакции на угрозу на основании уровня угрозы.
8. Система по п. 7, в которой программа граничного обнаружения сконфигурирована так, чтобы основывать чувствительность на многолюдности вокруг транспортного средства, времени суток и координатах GPS транспортного средства.
9. Система по п. 7, в которой программа граничного обнаружения сконфигурирована для утвердительного обнаружения занятости человека в транспортном средстве, когда пользовательские команды вводятся в пользовательский интерфейс транспортного средства.
10. Система по п. 7, в которой программа граничного обнаружения сконфигурирована для инициирования реакции на угрозу посредством передачи звука на звуковые громкоговорители транспортного средства.
11. Система по п. 7, в которой программа граничного обнаружения сконфигурирована для только инициирования реакции на угрозу при обнаружении парковки транспортного средства.
12. Система по п. 11, в которой программа граничного обнаружения сконфигурирована для отображения на карте положения объекта относительно множества зон, центрированных вокруг транспортного средства.
13. Система по п. 12, в которой по меньшей мере одна из зон является асимметричной.
14. Система по п. 13, в которой асимметричная зона имеет овальную форму и, таким образом, асимметрична относительно опорной оси под острым углом по отношению к продольной оси транспортного средства.
15. Система по п. 12, в которой по меньшей мере одна из зон включает в себя только области, непосредственно примыкающие к водительской стороне и пассажирской стороне транспортного средства.
16. Система по п. 7, в которой программа граничного обнаружения сконфигурирована для классификации обнаруженных объектов и автоматического назначения обнаруженным транспортным средствам и людям по меньшей мере заданного минимального класса угрозы, и уровень угрозы обнаруженного объекта также основывается на классе угрозы обнаруженного объекта.
17. Система по п. 7, в которой программа граничного обнаружения сконфигурирована так, чтобы основывать уровень угрозы на температуре обнаруженного объекта.
18. Система по п. 17, в которой программа граничного обнаружения сконфигурирована так, чтобы основывать уровень угрозы на температуре обнаруженного объекта только для одной или более заданных чувствительностей.
19. Способ контроля границ в транспортном средстве, содержащем запоминающее устройство, датчики расстояния и процессор, причем упомянутый способ содержит этапы, на которых, при обнаружении парковки транспортного средства при выполнении программы граничного обнаружения на процессоре:
определяют скорость и ускорение обнаруженного объекта относительно транспортного средства;
определяют чувствительность на основании обнаруженной занятости человека в транспортном средстве;
определяют уровень угрозы на основании положения, скорости, ускорения, чувствительности и положения;
инициируют реакцию на угрозу на основании уровня угрозы.
20. Способ по п. 19, в котором программа граничного обнаружения сконфигурирована так, чтобы:
основывать чувствительность на многолюдности вокруг транспортного средства, времени суток и координатах GPS транспортного средства; и
отображать на карте положение объекта относительно по меньшей мере одной асимметричной зоны, центрированной вокруг транспортного средства.
| US 7289019 B1, 30.10.2007 | |||
| US 7501937 B2, 10.03.2009 | |||
| Скреперный ковш | 1946 |
|
SU72779A1 |

