Ссылка на родственные заявки
[0001] Согласно настоящей заявке испрашивается приоритет по § 119(e) 35 раздела свода законов США в соответствии с предварительной заявкой на выдачу патента США №62/610015, поданной 22 декабря 2017 года, и предварительной заявкой на выдачу патента США №62/733367, поданной 19 сентября 2018 года, которые обе полностью включены настоящим в данный документ посредством ссылки.
Область техники, к, которой относится настоящее изобретение
[0002] Данное раскрытие относится к конвейерным системам, а более конкретно, к компонентам мониторинга конвейерной системы.
Предшествующий уровень техники настоящего изобретения
[0003] Конвейерные системы используют для транспортировки материалов или предметов из одного положения в другое. Одним типом конвейерной системы является конвейерная ленточная система, которая может содержать ряд роликов и конвейерную ленту, выполненную с возможностью движения по ним в направлении и по пути движения ленты по технологическому маршруту. Ролики включают в себя как ведущие ролики или шкивы, так и опорные ролики. Ведущие ролики соединены с источником энергии, таким как приводной двигатель, который вращает ведущий ролик, а ведущий ролик, в свою очередь, воздействует на конвейерную ленту. Например, конвейерная система может содержать передний ролик, приводной задний ролик, опорные ролики, расположенные между передним и задним роликами, и конвейерную ленту, образующую петлю вокруг роликов. Конвейерная лента имеет верхний отрезок в общем над опорными роликами и обратный отрезок в общем под опорными роликами. Приводной задний ролик зацепляет конвейерную ленту и приводит в движение верхний отрезок конвейерной ленты в продольном направлении и по пути движения ленты по технологическому маршруту. Опорные ролики контактируют с нижней поверхностью верхнего отрезка конвейерной ленты для поддержания веса материала, перемещаемого верхней поверхностью верхнего отрезка конвейерной ленты. Опорные ролики вращаются в ответ на фрикционное зацепление с нижней поверхностью верхнего отрезка конвейерной ленты и могут содержать роликовые подшипники для легкого вращения.
[0004] Конвейерные ленты могут изгибаться или сбиваться вбок к одной или другой стороне роликов по таким причинам, как неравномерные грузы, перемещаемые лентой. Конвейерные системы могут содержать устройства слежения за конвейерной лентой, которые реагируют на смещение ленты путем направления ленты назад на правильный путь движения ленты, который расположен по существу по центру роликов конвейера. Некоторые устройства слежения содержат по меньшей мере один ролик, по которому двигается лента. В ответ на смещение ленты по меньшей мере один ролик может поворачиваться таким образом, что поворотный ролик действует, перенаправляя конвейерную ленту назад на правильный путь ее движения. Иллюстративные устройства слежения описаны в патенте США №8556068 и публикация заявки на выдачу патента США №2016/0264358, которые обе полностью включены настоящим в данный документ посредством ссылки.
[0005] Конвейерные ленточные системы можно использовать для транспортировки различных перемещаемых материалов, таких как уголь или мелкий каменный материал. Во время использования остатки от перемещаемого материала могут скапливаться на конвейерной ленте. Остатки могут содержать небольшие частицы и/или жидкости, которые прилипают к ленте, так что остатки остаются в контакте с поверхностью конвейерной ленты после выгрузки с ленты остальной части перемещаемого материала. Для удаления этих остатков и мусора можно использовать устройства очистки конвейерной ленты. Устройство очистки конвейерной ленты может содержать одно или несколько скребковых лезвий, прикрепленных к удлиненному опорному элементу, такому как опорная штанга, проходящему вбок поперек ленты, причем скребковые лезвия смещены в зацепление с поверхностью конвейерной ленты. По мере того, как конвейерная лента перемещается по пути движения, скребковое лезвие соскребает остатки. Концы штанги проходят за пределы боковых сторон ленты и прикреплены к конструкции, поддерживающей конвейерную ленту посредством упругих установочных механизмов, которые смещают штангу и прикрепленное к ней скребковое лезвие к ленте, поэтому скребковые лезвия находятся с ней в упругом зацеплении. Упругое зацепление обеспечивает отклонение скребковых лезвий с пути неровностей на конвейерной ленте, таких как стык конвейерной ленты. Стык конвейерной ленты может содержать механические крепежные приспособления, прикрепленные к концам конвейерной ленты, которые зацепляют и соединяют вместе с помощью шарнирного пальца. Стык также может содержать металлические крепежные приспособления, которые имеют крепежные пластины, заклепки и/или скобы, которые проходят над внешней поверхностью ленты и при каждом обороте конвейерной ленты контактируют со скребковыми лезвиями, сцепленными с лентой. Другой тип стыка конвейерной ленты представляет собой крепежное приспособление в виде сплошной пластины, которое соединяет концы конвейерной ленты и проходит поперек конвейерной ленты. Крепежное приспособление в виде сплошной пластины также может проходить вверх от внешней поверхности конвейерной ленты и ударять скребковые лезвия, сцепленные с конвейерной лентой. Упругое зацепление устройства очистки конвейерной ленты обеспечивает отклонение скребковых лезвий с пути стыка без повреждения скребковыми лезвиями механических крепежных приспособлений.
[0006] Некоторые конвейерные ленточные системы загружают путем выгрузки на ленту материала, подлежащего перемещению. Например, конвейерная система для перемещения угля или мелкого каменного материала содержит ударную зону или зону загрузки по пути конвейерной ленты, в которой уголь или мелкий каменный материал выгружают на конвейерную ленту. Выгрузка может предусматривать падение угля или мелкого каменного материала с нескольких футов или более перед попаданием на верхнюю поверхность верхнего отрезка конвейерной ленты. Вдоль этих зон загрузки нижнюю поверхность верхнего отрезка конвейерной ленты поддерживают амортизирующие платформы для амортизации некоторой части удара со стороны выгружаемого на нее материала. Амортизирующие платформы представляют собой платформы и/или балки, которые контактируют с нижней поверхностью верхнего отрезка вдоль зоны загрузки. Платформы и/или балки обычно образованы из эластомерного материала, который обеспечивает упругую деформацию платформ и/или балок при ударе. Амортизирующие платформы могут содержать поднятые стороны, чтобы поддерживать ленту в общем в U-образной конфигурации вдоль зоны загрузки. Это снижает потерю материала.
[0007] Компоненты конвейерной ленточной системы с течением времени могут изнашиваться или ломаться из-за поломки одного или нескольких компонентов системы. Например, с течением времени скребковые лезвия устройства очистки конвейерной ленты будут изнашиваться и могут иметь меньшее сцепление с конвейерной лентой, чем нужно. Существующие способы мониторинга скребковых лезвий и опорных роликов предусматривают непосредственнный мониторинг состояния скребкового лезвия путем встаивания в лезвие или опорный ролик проводов или датчиков.
Краткое раскрытие настоящего изобретения
[0008] Согласно одному аспекту настоящего раскрытия представлено устройство, которое содержит конвейерную ленточную систему, содержащую устройство очистки конвейерной ленты. Устройство очистки конвейерной ленты имеет удлиненную опору и пару креплений, выполненных с возможностью расположения удлиненной опоры с прохождением поперек конвейерной ленты. Устройство очистки конвейерной ленты содержит чистящее лезвие, выполненное с возможностью функционального прикрепления к удлиненной опоре и зацепления конвейерной ленты. Устройство дополнительно содержит датчик, выполненный с возможностью определения по меньшей мере одной характеристики удлиненной опоры, когда удлиненная опора вибрирует во время работы конвейерной ленты. Процессор устройства выполнен с возможностью использования по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы. Таким образом, по меньшей мере одно свойство компонента конвейерной ленточной системы можно прогнозировать путем измерения вибраций удлиненной опоры, а не непосредственно компонента. Это защищает датчик, обеспечивая в то же время нужную информацию о конвейерной ленточной системе.
[0009] В одном варианте осуществления устройство содержит корпус, выполненный с возможностью крепления к удлиненной опоре, и в корпусе находится датчик. Корпус обеспечивает прикрепление датчика к удлиненной опоре существующего устройства очистки конвейерной ленты вместо необходимости замены устройства очистки конвейерной ленты. Кроме того, из-за того, что корпус выполнен с возможностью крепления к удлиненной опоре, можно продолжать использовать существующие чистящие лезвия, что упрощает установку.
[0010] В одном варианте осуществления удлиненная опора содержит пару противоположных концов и ось, проходящую между ними. Датчик находится на одном из концов удлиненной опоры наружу в осевом направлении от одного из креплений. Материал, перемещаемый конвейерной лентой, перемещается по некоторой траектории в общем между креплениями устройства очистки конвейерной ленты. Из-за того, что датчик находится снаружи в осевом направлении от одного из креплений, датчик находится за пределами пути материала, перемещаемого конвейерной лентой. Это защищает датчик за счет снижения воздействия на датчик таких частиц, как пыль и небольшие камни, которые могут падать с конвейерной ленты. В некоторых вариантах осуществления устройство содержит интерфейс связи, выполненный с возможностью передачи по беспроводной сети по меньшей мере одной характеристики на удаленный компьютер, содержащий процессор. Датчик, находящийся снаружи в осевом направлении от одного крепления, может уменьшать электромагнитные помехи со стороны опорной конструкции конвейерной ленточной системы.
[0011] Согласно другому аспекту настоящего раскрытия представлен способ мониторинга конвейерной ленточной системы. Конвейерная ленточная система содержит конвейерную ленту и устройство очистки конвейерной ленты, имеющее чистящее лезвие, выполненное с возможностью зацепления конвейерной ленты. Устройство очистки конвейерной ленты содержит удлиненную опору и пару креплений, выполненных с возможностью расположения удлиненной опоры с прохождением поперек конвейерной ленты. Способ предусматривает определение с использованием датчика, связанного с удлиненной опорой, по меньшей мере одной характеристики удлиненной опоры, когда удлиненная опора вибрирует во время работы конвейерной ленты. Способ дополнительно предусматривает использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы. Таким образом, по меньшей мере одно свойство компонента конвейерной ленточной системы можно прогнозировать без необходимости измерения свойства на самом компоненте. Из-за того, что некоторые компоненты конвейерной ленточной системы, такие как чистящие лезвия, изнашиваются и требуют периодической замены, способ обеспечивает непрерывный мониторинг конвейерной ленточной системы, несмотря на замену чистящих лезвий или других компонентов конвейерной ленточной системы, которые могут с течением времени изнашиваться.
[0012] В настоящем раскрытии также представлено устройство для мониторинга устройства очистки конвейерной ленты. Устройство содержит корпус, установочную часть корпуса, выполненную с возможностью прикрепления к опорной штанге устройства очистки конвейерной ленты, и датчик в корпусе, выполненный с возможностью определения по меньшей мере одной характеристики опорной штанги, когда опорная штанга вибрирует во время работы конвейерной ленты. Опорные штанги устройства очистки конвейерной ленты в промышленности до некоторой степени стандартизированы, и из-за того, что установочная часть выполнена с возможностью прикрепления к опорной штанге, устройство можно прикреплять к разным моделям устройств очистки конвейерной ленты производителя или устройств очистки конвейерной ленты других производителей. Это улучшает легкость, с которой пользователь может устанавливать или обслуживать устройство на устройстве очистки конвейерной ленты.
[0013] Устройство содержит в корпусе схему связи, выполненную с возможностью обмена данными с удаленным компьютером по сети. Устройство дополнительно содержит в корпусе процессор, который функционально соединен с датчиком и схемой связи. Процессор выполнен с возможностью обеспечения передачи схемой связи данных, связанных по меньшей мере с одной характеристикой опорной штанги, на удаленный компьютер. Удаленный компьютер может использовать переданные данные для мониторинга устройства очистки конвейерной ленты, конвейерной ленты или их комбинации. В одном варианте осуществления удаленный компьютер получает данные от схемы связи и использует данные для прогнозирования по меньшей мере одного свойства устройства очистки конвейерной ленты, конвейерной ленты или их комбинации.
[0014] Согласно другому аспекту представлено устройство для соединения сенсорного модуля с опорной штангой устройства очистки конвейерной ленты. Устройство содержит корпус, имеющий наружную поверхность для приема сенсорного модуля и установочную часть, имеющую размер для установки в отверстие опорной штанги и прохождения вдоль внутренней поверхности опорной штанги. Устройство дополнительно содержит исполнительный механизм, функционально соединенный с установочной частью и подвижный, обеспечивая зацепление установочной частью внутренней поверхности опорной штанги. С установочной частью, прикрепленной к опорной штанге, корпус устройства вибрирует с опорной штангой во время работы конвейерной ленты. Сенсорный модуль может измерять по меньшей мере одну характеристику корпуса, когда корпус вибрирует с опорной штангой во время работы конвейерной ленты. Таким образом, по меньшей мере одну характеристику корпуса можно использовать для определения по меньшей мере одного свойства соответствующей конвейерной ленточной системы, когда неудобно крепить сенсорный модуль непосредственно к опорной штанге.
Краткое описание фигур
[0015] На фиг. 1А представлен вид в перспективе конвейерной системы, содержащей конвейерную ленту, устройства очистки конвейерной ленты и датчики, связанные с устройствами очистки конвейерной ленты, выполненные с возможностью передачи сигналов, относящихся к свойствам устройств очистки ленты, по беспроводной сети;
[0016] На фиг. 1В представлен вид в перспективе конвейерной ленты и одного из устройств очистки конвейерной ленты конвейерной системы фиг. 1А;
[0017] На фиг. 1С представлен вид в перспективе другой конвейерной системы, содержащей верхнюю конвейерную систему, имеющую устройства очистки конвейерной ленты, нижнюю конвейерную систему, имеющую амортизирующую платформу, и систему с перемещающим желобом для направления выгруженного материала с верхней конвейерной системы в зону загрузки нижней конвейерной системы на амортизирующей платформе;
[0018] На фиг. 2А представлен вид в перспективе сенсорного модуля для установки на опорной штанге одного из устройств очистки конвейерной ленты фиг. 1А для мониторинга одного или нескольких свойств устройства очистки ленты;
[0019] На фиг. 2В представлен вид в поперечном разрезе датчика фиг. 2А;
[0020] На фиг. 3 представлена схема сети, иллюстрирующая беспроводную связь датчиков конвейерной системы фиг. 1А с системой управления посредством беспроводного шлюза и облачной вычислительной системы;
[0021] На фиг. 4 представлена схема сети, иллюстрирующая беспроводную связь датчиков конвейерной системы фиг. 1А с системой управления посредством беспроводного шлюза и облачного хранения, а также вторую облачную вычислительную систему для предоставления дополнительных параметров в систему управления;
[0022] На фиг. 5 представлена иллюстрация монитора компьютера, отображающего приложение, которое предоставляет пользователю информацию на основании данных, измеренных датчиками конвейерной системы фиг. 1А;
[0023] На фиг. 6 представлена иллюстрация монитора компьютера, отображающего приложение, которое предоставляет пользователю информацию на основании данных, измеренных датчиками конвейерной системы фиг. 1А;
[0024] На фиг. 7 представлена иллюстрация монитора компьютера, отображающего приложение, которое предоставляет пользователю информацию на основании данных, измеренных датчиками конвейерной системы фиг. 1А;
[0025] На фиг. 8 представлена иллюстрация монитора компьютера, отображающего сообщение электронной почты, которое предоставляет пользователю информацию на основании данных, измеренных датчиками конвейерной системы фиг. 1А;
[0026] На фиг. 9 представлена иллюстрация монитора компьютера, отображающего сообщение электронной почты, которое предоставляет пользователю информацию на основании данных, измеренных датчиками конвейерной системы фиг. 1А;
[0027] На фиг. 10 представлен вид в перспективе смартфона, отображающего приложение, которое предоставляет пользователю информацию на основании данных, измеренных датчиками конвейерной системы фиг. 1А;
[0028] На фиг. 11 представлен вид в перспективе устройства отслеживания, имеющего датчик, причем устройство отслеживания подходит для использования в конвейерной системе фиг. 1А или фиг. 1С;
[0029] На фиг. 12 представлен вид в перспективе другого устройства отслеживания, имеющего датчик, причем устройство отслеживания подходит для использования в конвейерной системе фиг. 1А или фиг. 1С;
[0030] На фиг. 13А, 13В и 13С представлены, соответственно, вид в перспективе, вид в поперечном разрезе и вид в разобранном виде автономного сенсорного модуля для использования в конвейерной системе фиг. 1А или фиг. 1С;
[0031] На фиг. 14 представлен вид в перспективе сенсорного модуля фиг. 13, имеющего шнур питания;
[0032] На фиг. 15 представлен вид в перспективе сенсорного модуля для использования в конвейерной системе фиг. 1А или фиг. 1С, причем сенсорный модуль имеет элемент корпуса, имеющий размер для установки внутри опорной штанги одного из устройств очистки конвейерной ленты конвейерной ленточной системы;
[0033] На фиг. 16А представлен вид в перспективе основного устройства очистки ленты конвейерной системы фиг. 1А;
[0034] На фиг. 16В представлен вид в перспективе дополнительного устройства очистки ленты конвейерной системы фиг. 1А;
[0035] На фиг. 17А, 17В и 17С представлен способ мониторинга состояния конвейерной ленты конвейерной системы фиг. 1А или фиг. 1С;
[0036] На фиг. 18 представлена блок-схема сенсорного контура сенсорного модуля, который содержит датчики для обнаружения движения;
[0037] На фиг. 19 представлена блок-схема узла связи для связи с сенсорным контуром фиг. 18;
[0038] На фиг. 20А представлен вид в перспективе сенсорного модуля, прикрепленного к натяжному кронштейну устройства очистки конвейерной ленты для использования в конвейерной системе фиг. 1А или фиг. 1С;
[0039] На фиг. 20 В представлен вид в разобранном виде узла натяжного кронштейна и сенсорного модуля фиг. 20А;
[0040] На фиг. 21 представлен набор графиков, показывающих амплитуду ускорения в зависимости от времени при измерении с помощью сенсорного модуля фиг. 2А-2В при разных натяжениях устройства очистки ленты;
[0041] На фиг. 22 представлен вид в перспективе конвейерной системы фиг. 1А, на котором сенсорные модули обмениваются данными по сети сотовой связи;
[0042] На фиг. 23 представлена блок-схема системы мониторинга вспомогательного устройства конвейерной системы;
[0043] На фиг. 24А представлен вид спереди в вертикальном разрезе сенсорного модуля для прикрепления к опорной штанге устройства очистки конвейерной ленты для мониторинга одной или нескольких характеристик устройства очистки конвейерной ленты;
[0044] На фиг. 24В представлен вид сзади в вертикальном разрезе сенсорного модуля фиг. 24А; а
[0045] На фиг. 25 представлена блок-схема, иллюстрирующая способ установки датчика фиг. 24А и 24 В.
[0046] На фиг. 26 представлен вид в перспективе сенсорного модуля, соединенного с устройством очистки конвейерной ленты, показывающий опорную штангу устройства очистки конвейерной ленты, зафикисрованную между верхней частью корпуса и нижней частью корпуса сенсорного модуля;
[0047] На фиг. 27 представлен вид в перспективе в разобранном виде сенсорного модуля фиг. 26, показывающий печатную плату, опору печатной платы и аккумулятор, которые расположены в отделении нижней части корпуса;
[0048] На фиг. 28 представлено схематичное изображение смартфона, используемого для установки сенсорного модуля фиг. 26, и сенсорного модуля, передающего информацию на удаленный сервер;
[0049] На фиг. 29 представлен вид в перспективе расширителя штанги, содержащего корпус, имеющий разнесенные, дуговые стенки, имеющие размер для установки внутри отверстия опорной штанги устройства очистки конвейерной ленты, и цилиндрическую внешнюю поверхность, к которой может быть прикреплен сенсорный модуль фиг. 26;
[0050] На фиг. 30 представлен вид в поперечном разрезе, сделанном по линии 30-30 на фиг. 29, показывающий болт исполнительного механизма расширителя штанги в резьбовом зацеплении с распорным приспособлением расширителя штанги;
[0051] На фиг. 31 представлен вид в поперечном разрезе распорного приспособления, сделанном по линии 31-31 на фиг. 29, показывающий кулачковые стенки распорного приспособления, имеющие наклонные поверхности для раздвигания дуговых стенок корпуса и прикрепления расширителя штанги к опорной штанге;
[0052] На фиг. 32 представлен вид в поперечном разрезе расширителя штанги, сделанном по линии 31-31 на фиг. 29, показывающий расширитель штанги, соединенный с опорной штангой устройства очистки конвейерной ленты, причем устройство очистки конвейерной ленты имеет крепление на конце опорной штанги, которое ограничивает размещение сенсорного модуля на опорной штанге;
[0053] На фиг. 33 представлен вид, аналогичный фиг. 32, показывающий болт исполнительного механизма, затянутый для втягивания клина в корпус и прижимания дуговых стенок корпуса к внутренней поверхности опорной штанги; а
[0054] На фиг. 34 представлен график, показывающий данные от акселерометра, прикрепленного к опорной штанге устройства очистки конвейерной ленты, показывающие изменения ответа частотной области сигналов от акселерометра с изменениями рабочих условий соответствующей конвейерной ленточной системы.
Подробное раскрытие настоящего изобретения
[0055] Согласно одному аспекту настоящего раскрытия представлено устройство для мониторинга конвейерной системы. Устройство может содержать один или несколько датчиков, связанных с конвейерными лентами, а также вспомогательные устройства конвейерной системы, такие как опорные ролики, устройства очистки, устройства слежения и/или амортизирующие платформы. Один или несколько датчиков могут быть связаны с вспомогательными устройствами с помощью ряда подходов, таких как объединение с вспомогательными устройствами, прикрепление к вспомогательным устройствам и/или прикрепление к элементам рамы конструкции, поддерживающей конвейерную ленту рядом с вспомогательными устройствами.
[0056] Вспомогательные устройства могут содержать детали с относительно коротким ожидаемым сроком службы или сменные детали и детали с относительно длинным ожидаемым сроком службы или постоянные детали. Хотя называются «постоянными», постоянные детали могут портиться с течением времени, и допускается их замена. Постоянные детали имеют более прогнозируемый срок службы и выполнены с большим сроком службы, чем «сменные детали». Например, сменной деталью устройства очистки ленты может быть скребковое лезвие устройства очистки ленты, а постоянной деталью устройства очистки ленты может быть корпус или удлиненная, жесткая установочная конструкция устройства очистки ленты, такая как элемент основания или опорная штанга. В качестве другого примера, постоянная деталь представляет собой деталь рамы конвейерной системы, на которой установлены вспомогательные устройства.
[0057] Один или несколько датчиков устройства могут быть прикреплены, встроены и/или расположены рядом с постоянной деталью (деталями) одного или нескольких вспомогательных устройств. Датчики обнаруживают одну или несколько характеристик вспомогательного устройства, такую как ускорение. Ускорение может быть вследствие, например, резких ударов по детали вспомогательного устройства, например, удара стыка о скребковое лезвие устройства очистки конвейерной ленты. Датчики также могут определять одну или несколько характеристик конвейерной ленты, например, с помощью использования оптического датчика для обнаружения обратного перемещения материала на обратный отрезок конвейерной ленты. Датчики также могут обнаруживать звук. Звук можно использовать для обнаружения, движется ли лента, и можно отслеживать конкретные звуки, которые могут указывать на мусор на ленте, столкновение с устройством очистки или неисправный подшипник в одном из роликов. Датчики также могут обнаруживать одно или несколько окружающих условий, таких как температура и влажность. Датчики также могут обнаруживать температуру одного или нескольких компонентов вспомогательного устройства.
[0058] Устройство может содержать процессор, и измеренные данные, соответствующие обнаруженным одной или нескольким характеристикам, передаются в процессор. Процессор идентифицирует состояния отказа конвейерной системы, такие как изношенное или поломанное вспомогательное устройство, на основании измеренных данных. В одном варианте процессор представляет собой локальный процессор, непосредственно соединенный с датчиком. В другом варианте процессор представляет собой удаленное вычислительное устройство, которое получает данные от одного или нескольких сенсорных модулей по проводной и/или беспроводной сети связи. В некоторых вариантах каждый сенсорный модуль обменивается данными непосредственно с узлом связи, таким как роутер. В другом варианте сенсорные модули образуют смешанную сеть, в которой первый сенсорный модуль выступает в качестве связного ретранслятора для второго сенсорного модуля, второй сенсорный модуль выступает в качестве связного ретранслятора для третьего сенсорного модуля и так далее. Способность сенсорных модулей выступать в качестве связных ретрансляторов позволяет сенсорным модулям, которые испытывают затруднение при непосредственном обмене данными с узлом связи системы, все-таки предоставлять данные в процессор. Например, узел связи может быть расположен в начале подземной шахты. Первый сенсорный модуль находится ближе всего к узлу связи, тогда как второй и третий сенсорные модули расположены все дальше в шахте. Хотя второй и третий сенсорные модули могут быть неспособны обмениваться данными непосредственно с узлом связи вследствие помех со стороны камней шахты, данные от третьего сенсорного модуля могут быть переданы вторым сенсорным модулем в первый сенсорный модуль, который, в свою очередь, передает информацию в узел связи. Аналогичным образом, данные от второго сенсорного модуля могут быть переданы первым сенсорным модулем в узел связи. В других вариантах один или несколько сенсорных модулей содержат карту сотовой связи, такую как карта глобальной системы подвижной связи («GSM») и обмениваются данными по сотовой сети.
[0059] В одном подходе процессор идентифицирует состояние отказа путем сравнения измеренных данных с минимальным пороговым значением, максимальным пороговым значением или с приемлемым диапазоном значений. Например, данные от акселерометра, обнаружившего ускорение опорного ролика, сравнивают с максимальным пороговым значением. Если ускорение превышает максимальное пороговое значение, процессор идентифицирует неисправность из-за того, что большое ускорение может указывать, что опорный ролик не вращается, или какое-то условие или набор условий вызывают вибрацию конвейерной ленты рядом с натяжным роликом. В другом примере процессор получает данные от акселерометра, выполненного с возможностью измерения ускорения устройства очистки конвейерной ленты, и сравнивает значения ускорения с приемлемым диапазоном значений ускорения. Если измеренные значения ускорения слишком низкие, процессор может идентифицировать состояние отказа из-за того, что низкие значения ускорения могут быть результатом того, что скребковое лезвие устройства очистки конвейерной ленты не зацепляет конвейерную ленту. Если измеренные значения ускорения слишком высокие, процессор может идентифицировать состояние отказа из-за того, что высокие значения ускорения могут быть результатом того, что скребковое лезвие проезжает по остаткам на конвейерной ленте вместо соскребания остатков, например, если лезвие слишком изношено.
[0060] В одном варианте процессор контролирует данные, выводимые одним или нескольким датчиками в течение некоторого периода времени для идентификации тенденций, которые могут указывать на неисправность конвейерной системы. Например, процессор может использовать данные от акселерометра, обнаружившего ускорение устройства слежения, для идентификации частоты корректирующих действий, предпринимаемых устройством слежения. Если процессор определяет, что частота корректирующих действий превышает пороговое значение, процессор идентифицирует состояние отказа из-за того, что частота корректирующих действий может указывать, что какое-то условие или набор условий вызывают непрерывный сдвиг конвейерной ленты в одном направлении. В одном варианте устройство содержит запоминающее устройство, выполненное с возможностью хранения данных, выводимых одним или несколькими датчиками. Процессор функционально соединен с запоминающим устройством и может извлекать информацию, относящуюся к данным датчиков, выводимых запоминающим устройством, например, для определения исторических тенденций выводимых данных датчиков.
[0061] Устройство также может содержать пользовательский интерфейс, функционально соединенный с процессором и выполненный с возможностью отображения пользователю идентифицированных состояний отказа. В некоторых вариантах пользовательский интерфейс представляет собой удаленное вычислительное устройство, используемое удаленно от контролируемой конвейерной ленточной системы. Процессор может представлять собой локальный компьютер на объекте, содержащем контролируемую конвейерную ленточную систему, а пользовательский интерфейс может представлять собой удаленное вычислительное устройство, задействуемое пользователем. Например, пользовательский интерфейс может представлять собой персональный компьютер, портативный компьютер, смартфон или планшетный компьютер. Если пользовательский интерфейс представляет собой портативное устройство, такое как смартфон или планшетный компьютер, в случае состояния отказа локальный компьютер может передавать на портативное устройство предупреждение, такое как сообщение электронной почты или уведомление.
[0062] Как показано на фиг. 1А, 1В и 1С, представлены конвейерные системы 100, 100А, которые содержат конвейерные ленты 102 и ряд вспомогательных устройств, таких как амортизирующие платформы 110, устройства 120 очистки ленты, опорные ролики 130, ведущие ролики 135 и устройства 140 слежения. В качестве некоторых примеров конвейерные системы 100, 100А могут являться компонентами большой конвейерной системы, могут представлять собой отдельные системы в общем месте или отдельные системы в отдельных местах. Что касается фиг. 3, конвейерные системы 100, 100А содержат систему 10 мониторинга для мониторинга одной или нескольких характеристик одного или нескольких компонентов конвейерных систем 100, 100А. Система 10 мониторинга содержит сенсорные модули 112, 122, 132, 142, расположенные на одном или нескольких компонентах конвейерных систем 100, 100А. Каждый сенсорный модуль 112, 122, 132, 142 содержит один или несколько датчиков и модуль связи. Сенсорные модули 112, 122, 132, 142 выполнены с возможностью определения одного или нескольких состояний одного или нескольких компонентов на основании, например, движений компонентов или их частей. Система 10 мониторинга содержит удаленный ресурс, такой как облачная вычислительная система 105, которая обрабатывает данные от сенсорных модулей 112, 122, 132, 142 для определения одной или нескольких характеристик соответствующих вспомогательных устройств и конвейерной ленты 102 и/или для прогнозирования свойств вспомогательных устройств и конвейерной ленты 102, таких как оставшийся срок их службы. Облачная вычислительная система 105 выполнена с возможностью прогнозирования других свойств конвейерной системы 100, например, двигается ли лента, сколько двигалась лента, правильно ли сцеплено с лентой 102 вспомогательное устройство, величина сползания материала и наличие или отсутствие материала на ленте 102. Облачная вычислительная система 105 может содержать один или несколько удаленных серверов, обеспечивающих функциональность облачных вычислений.
[0063] Сенсорные модули 112, 122, 132, 142 обмениваются данными с облачной вычислительной системой 105 посредством шлюза 104. Шлюз 104 представляет собой интернет-маршрутизатор или вышку сотовой связи, которая связывает сенсорные модули 112, 122, 132, 142 с интернетом. Пользователь просматривает информацию из облака с помощью компьютера 107 (см. фиг. 3) или смартфона 106. Компьютер 107 является частью системы 101 управления, такой как компьютер, выполненный с возможностью управления конвейерной системой 100. Хотя на фиг. 3 показаны настольный компьютер 107 и смартфон 106, можно использовать другие вычислительные устройства, такие как портативный компьютер, планшетный компьютер, умные часы и очки виртуальной реальности.
[0064] Как показано на фиг. 1А и 1В, опорные ролики 130 и ведущие ролики 135 системы 100 соединены с возможностью вращения с рамой 103. Конвейерная лента 102 представляет собой непрерывную ленту, проходящую вокруг множества опорных роликов 120 и ведущих роликов 135 таким образом, что конвейерная лента 102 двигается относительно рамы 103 по некоторой траектории. Каждое устройство 120 очистки ленты содержит чистящее лезвие, например, множество скребковых лезвий 124, которые смещают в зацепление с внешней поверхностью 102О ленты 102. Устройства 120 очистки ленты включают в себя устройство предварительной очистки или основное устройство 120А очистки ленты и дополнительное устройство 120 В очистки ленты. Основное устройство 120А очистки ленты расположено на приводном или ведущем шкиве 135 для того, чтобы удалять материал с ленты 102 и способствовать выгрузке материала с конвейерной ленты 102. Дополнительное устройство 120 В очистки ленты расположено вдоль обратного отрезка конвейерной ленты 102 для обеспечения дополнительной очистки конвейерной ленты 102 и ограничения «обратного перемещения» материала. Другими словами, дополнительное устройство 120 В очистки ленты обеспечивает выгрузку материала с конвейерной ленты 102 вместо движения назад к заднему ведущему ролику 135 конвейерной ленты 102.
[0065] В некоторых вариантах основное устройство 120А очистки ленты выполнено с возможностью поворота в зацепление с лентой 102. В некоторых вариантах дополнительное устройство 120 В очистки ленты выполнено с возможностью вертикального движения в прямолинейном направлении, по существу перпендикулярном поверхности ленты 102, в зацепление с лентой 102.
[0066] Пример основного устройства 120А очистки ленты представлен на фиг. 16А. Устройство 120А очистки ленты содержит одно или несколько скребковых лезвий 124, прикрепленных к удлиненной опоре, такой как опорная штанга 126. Скребковое лезвие 124 может быть сделано из множества материалов, таких как сталь, карбид или уретан. Скребковое лезвие 124 может представлять собой узел скребковых лезвий, имеющий упругую часть корпуса, такую как эластомерная или полимерная часть корпуса, и твердый кончик лезвия, например, карбидный кончик. Каждый узел скребковых лезвий также может содержать основание, такое как U-образный металлический кронштейн, который прикручивают болтами к опорной штанге 126. Часть корпуса упруго смещает скребковое лезвие к конвейерной ленте и упруго деформируется, обеспечивая отклонение скребкового лезвия с пути помехи на конвейерной ленте 102, такой как крепежное приспособление на ленте. Опорная штанга 126 содержит концевые части 1626, 1627, которые соединены с креплениями 1603, 1604, и промежуточную часть 1625, которая соединена с возможностью отсоединения с концевыми частями 1626, 1627. Разъемное соединение обеспечивает легкое снятие промежуточной части 1625 и соединенных с ней скребковых лезвий 124 для технического обслуживания. Крепления 1603, 1604 выполнены с возможностью прикрепления к раме 103 конвейерной ленты 102, например, с помощью сварки или крепежных приспособлений.
[0067] Крепления 1626, 1627 обеспечивают регулируемый поворот опорной штанги 126 в направлениях 126А, 126 В. Каждое крепление 1603, 1604 содержит натяжной кронштейн 1670, имеющий хомут 1671, прикрепленный к опорной штанге 126, и пружину 1601. Пружина 1601 упруго смещает скребковые лезвия 124 к конвейерной ленте 120. Крепления 1603, 1604 обеспечивают поворот опорной штанги 126 в направлении 126А в ответ на удар о скребковые лезвия 124, например, крепежного приспособления конвейерной ленты 102, ударяющего скребковые лезвия 124. Поворот опорной штанги 126 в направлении 126А вызывает сжатие натяжным кронштейном 1670 пружины 1601. Затем сжатая пружина 1601 толкает натяжной кронштейн 1670 назад в его первоначальное положение, что перемещает скребковые лезвия 124 назад в зацепление с конвейерной лентой 102.
[0068] В некоторых вариантах скребковые лезвия 124 содержат схему связи для связи с сенсорным модулем 122, таким как чип 1629 радиочастотной идентификации. Что касается фиг. 2 В, сенсорный модуль 122 содержит сенсорный контур 123, такой как радиочастотный датчик 1803 (см. фиг. 18), содержащий считыватель радиочастотных меток, который идентифицирует одно или несколько скребковых лезвий 124 путем считывания чипа 1629 радиочастотной идентификации одного или нескольких скребковых лезвий 124. В одном варианте чип 1629 радиочастотной идентификации (см. фиг. 16А) представляет собой чип ближнего поля или чип без питания. Считыватель 127 радиочастотных меток создает магнитное поле, которое индуцирует ток в чипе 1629 радиочастотной идентификации. Индуцированный ток используется для передачи кода. В некоторых вариантах система 101 управления, при анализе данных из сенсорного модуля 122, использует идентификацию информации о скребковых лезвиях 124, такую как модель скребковых лезвий 124 и/или материал, из которого образованы скребковые лезвия 124. Например, можно ожидать, что при стандартном использовании карбидное скребковое лезвие будет вибрировать больше, чем уретановое скребковое лезвие. Альтернативно или дополнительно, измерение с помощью чипа 1629 радиочастотной идентификации используют для обнаружения присутствия скребкового лезвия 124. Если чип 1629 радиочастотной идентификации не обнаружен, сенсорный модуль 122 передает в систему 101 управления сигнал, указывая, что скребковое лезвие 124 отсутствует. Кроме того, система 101 управления может быть выполнена с возможностью определения на основании считывания чипа 1629 радиочастотной идентификации, не установлено ли неправильное скребковое лезвие 124.
[0069] Пример дополнительного устройства 120В очистки ленты показан на фиг. 16В. Устройство 120В очистки ленты содержит одно или несколько скребковых лезвий 1684, прикрепленных к удлиненной опоре, такой как опорная штанга 1688. Скребковые лезвия 1684 могут быть сделаны из множества материалов, таких как сталь, карбид или уретан. Опорная штанга 1688 содержит концевые части 1686, 1687, которые соединены с креплениями 1663, 1664, и промежуточную часть 1685, которая соединена с концевыми частями 1686, 1687. Скребковые лезвия 1684 соединены с возможностью снятия с промежуточной частью 1685, обеспечивая легкое снятие скребковых лезвий 1684 для технического обслуживания. Крепления 1663, 1664 выполнены с возможностью прикрепления к раме 103 конвейерной ленты 102, например, с помощью сварки или крепежных приспособлений.
[0070] Крепления 1663, 1664 обеспечивают регулируемое прямолинейное движение опорной штанги 1688 в направлениях 1661А и 1661В. Пара пружин 1661 поджимают опорную штангу 1688 и, таким образом, скребковые лезвия 1684 к ленте 102 в направлении 1661В. Крепления 1663, 1664 обеспечивают движение опорной штанги 1688 в направлении 1661А в ответ на удар о скребковые лезвия 1684, например, поврежденного крепежного приспособления конвейерной ленты 102, ударяющего скребковые лезвия 1684. Движение опорной штанги 1688 в направлении 1661А вызывает сжатие пружин 1661. Тогда сжатые пружины 1661 поджимают опорную штангу 1688 в направлении 1661 В назад в зацепление с лентой 102. Как описано ниже, для обнаружения движения скребковых лезвий 124 с опорной штангой 1688 может быть установлен один или несколько сенсорных модулей 122. Другие устройства очистки ленты описаны в патентах США №№7093706; 7347315; 8757360; и 9586765, которые все полностью включены в данный документ посредством ссылки.
[0071] Крепления 1663, 1664 содержат квадратные корпуса 1636 и муфтовые элементы 1638, которые обеспечивают регулируемый поворот опорной штанги 1688 вокруг продольной оси 1688А опорной штанги 1688. Концевые части 1686, 1687 проходят через квадратные корпуса 1636 и прикреплены к муфтовым элементам 1638. Между внутренними стенками прямоугольного корпуса 1636 и внешними стенками муфтовых элементов 1638 расположен упругий материал 1640. Во время работы трение между скребковыми лезвиями 124 и лентой 102 поворачивает опорную штангу 1688. Упругий материал 1640 противодействует повороту и смещает муфтовые элементы 1638 назад в показанное положение для того, чтобы сохранить зацепление между скребковыми лезвиями 1684 и лентой 102.
[0072] Возвращаясь к фиг. 1С, конвейерная система 100А имеет две ленты 102, в том числе верхнюю ленту 102U и нижнюю ленту 102L. Верхнюю ленту 102U очищают устройства 120 очистки ленты, имеющие сенсорные модули 122. Материал, перемещаемый верхней лентой 102U, выгружается в желоб 108. Желоб 108 направляет выгруженный материал в зону загрузки нижней ленты 102L. В зоне загрузки нижняя лента 102L опирается на амортизирующую платформу 110.
[0073] Скребки 120, амортизирующая платформа 110 и другие вспомогательные устройства опираются на раму 203 конвейерной системы 100А и зацепляют ленту 102. В одном варианте сенсорные модули 112, 122, 132 и/или 142 соединены с рамой 103 рядом с соединением рамы 103 и соответствующего вспомогательного устройства. Движение частей вспомогательных устройств вызывает вибрацию рамы 103, а сенсорные модули 112, 122, 132 и/или 142 измеряют эту вибрацию.
[0074] Что касается фиг. 1А, конвейерная система 100 дополнительно содержит узел 104 связи, такой как беспроводной роутер, который беспроводным образом обменивается данными с множеством сенсорных модулей 112, 122, 132 и 142. Беспроводная связь между сенсорными модулями 112, 122, 132 и 142 и узел 104 связи могут использовать любой из множества протоколов связи. Например, сенсорные модули 112, 122, 132, 142 могут использовать такие протоколы инфраструктуры, как 6LowPAN, IPv4/Ipv6, RPL, QUIC, Aeron, uIP, DTLS, ROLL/RPL, NanoIP, CNN и TSMP; такие протоколы идентификации, как ЕРС, uCode, Ipv6 и URIs; такие протоколы связи/транспортные протоколы, как Wifi, Bluetooth®, DigiMesh, ANT, NFC, WirelessHart, IEEE 802.15.4, Zigbee, EnOcean, WiMax и LP WAN; такие протоколы обнаружения, как Physical Web, mDNS, HyperCat, UpnP и DNS-SD; такие протоколы данных, как MQTT, MQTT-SN, Mosquitto, 1MB MessageSight, STOMP, XMPP, XMPP-IoT, CoAP, AMQP, Websocket и Node; такие протоколы управления устройствами, как TR-069 и OMA-DM; семантическую модель JSON-LD и Web Thing; и/или такие протоколы многоуровневых фреймворков, как Alljoyn, IoTivity, Weave и Homekit.
[0075] В некоторых вариантах узел 104 связи обменивается данными с внешней системой обработки данных, такой как облачная вычислительная система 105, как показано на фиг. 1 А. Облачная вычислительная система 105 может сохранять переданные данные и/или обрабатывать переданные данные и передавать данные назад в узел 104 связи или другую компьютерную систему для дальнейшей обработки или хранения. Например, облачная вычислительная система 105 может содержать одно или несколько приложений для обработки данных, выполненных с возможностью работы на виртуальной машине в облачной вычислительной системе 105 и обработки данных, передаваемых в облачную вычислительную систему 105 узлом 104 связи. Альтернативно или дополнительно, узел 104 связи передает данные от сенсорных модулей 112, 122, 132 и 142 в один или несколько компьютеров на месте, таких как стационарный компьютер или портативные компьютеры управления, например, смартфоны или планшеты, перемещаемые пользователями конвейерной системы 100. Сенсорные модули 112, 122, 132 и 142 также могут передавать данные непосредственно в один или несколько компьютеров на месте с использованием одного или нескольких протоколов связи, таких как протоколы, перечисленные выше. Кроме того, перед передачей данных в один или несколько компьютеров на месте, узел 104 связи и/или облачную вычислительную систему 105 сенсорные модули 112, 122, 132, 142 могут обмениваться данными между собой или между другими датчиками. При связи с облачной вычислительной системой 105, компьютером на месте или другим внешним устройством узел 104 связи может использовать те же самые протоколы или другие протоколы.
[0076] На фиг. 18 представлен сенсорный контур 1800, который можно использовать в качестве части сенсорных модулей 112, 122, 132 и 142, описанных выше. Сенсорный контур 1800 содержит процессор 1802, соединенный с возможностью обмена данными с запоминающим устройством 1804, модулем 1806 связи и одним или несколькими датчиками 1807А. Блок 1804 памяти представляет собой машиночитаемое запоминающее устройство для долговременного хранения, такое как оперативное запоминающее устройство (RAM), твердотельное запоминающее устройство или запоминающее устройство на основе магнитного диска.
[0077] Источник 1801 энергии, такой как прямое электрическое соединение (например, проводное соединение) и/или аккумулятор, питает процессор 1802, запоминающее устройство 1804, модуль 1806 связи и датчики 1807А. Сенсорные модули 112, 122, 132 и 142 могут быть выполнены с возможностью работы от аккумулятора, если прямое электрическое соединение разорвано, и передавать предупреждение, указывая, что прямое электрическое соединение было разорвано. В некоторых вариантах источник 1801 энергии содержит зарядное устройство или генератор, который содержит один или несколько механизмов инерциального демпфирования, таких как маховик, маятник, амортизатор или поворотный демпфер, способный преобразовывать кинетическую энергию в электрическую энергию и заряжать аккумулятор. Например, когда сенсорные модули 112, 122, 132 и 142 вибрируют вследствие работы конвейерной системы 100, 100А, аккумуляторы датчиков 1807А заряжаются.
[0078] В одном варианте один или несколько датчиков 1807А содержат гироскоп 1807, акселерометр 1808 и магнитометр 1809. Датчики 1807А обнаруживают движение соответствующего вспомогательного устройства. Данные, представляющие обнаруженное движение, передаются в процессор 1802. Процессор 1802 записывает полученные данные в запоминающее устройство 1804. Дополнительно или альтернативно, процессор 1802 приводит в действие модуль 1806 связи для беспроводной передачи данных, представляющих обнаруженное движение, во внешнее устройство с использованием одного или нескольких стандартов, перечисленные выше.
[0079] Сенсорные модули 112, 122, 132 и 142 могут содержать, например, цифровые или аналоговые акселерометры 1808, имеющие одну, две или три оси; цифровые или аналоговые гироскопы 1807, имеющие гироскопы, две или три оси; и/или магнитометр 1809, такой как датчик магнитного поля MEMS. В связи с этим сенсорные модули 112, 122, 132 и 142 могут иметь три, шесть или девять осей измерения. Акселерометры могут быть выполнены с возможностью измерения одной или нескольких статических или динамических сил, прикладываемых к вспомогательным устройствам 110, 120 и 130 конвейерной ленточной системы. Гироскопы можно использовать для определения величины и скорости вращения частей вспомогательных устройств 110, 120 и 130, например, поворота опорной штанги 126 (см. фиг. 16А) в направлениях 126А, 126В в пространстве. Магнитометр может обеспечить абсолютные угловые измерения частей вспомогательных устройств 110, 120 и 130, например, поворот опорной штанги 126 в направлении 126А, 126В относительно магнитного поля земли. Сенсорные модули 112, 122, 132 и 142 могут дополнительно содержать процессор для обработки посылаемых данных, одно или несколько запоминающих устройств для хранения и обработки посылаемых данных и один или несколько модулей связи для связи с различными внешними устройствами. Один или несколько модулей связи могут обмениваться данными с внешними устройствами с использованием одного или нескольких протоколов, перечисленные выше.
[0080] В одном варианте в блоке 1804 памяти хранятся процедуры обработки данных, выводимых датчиками 1807, 1808 и 1809. Процессор 1802 запускает сохраненные процедуры обработки данных. Результаты процедур передает модуль 1806 связи.
[0081] В одном варианте модуль 1806 связи передает данные в узел 104 связи (см. фиг. 1А) по проводному или беспроводному соединению. Как показано на фиг. 19, узел 104 связи содержит процессор 1902, запоминающее устройство 1904, первый модуль 1906 связи и второй модуль 1908 связи. Первый модуль 1906 связи обменивается данными с использованием того же самого протокола связи, что и модуль 1806 связи. Первый модуль 1906 связи получает данные от модулей 1806 связи множества локальных сенсорных контуров 1800. Полученные данные передаются из первого модуля 1906 связи в процессор 1902.
[0082] Процессор 1902 приводит в действие второй модуль 1908 связи для передачи полученных данных на удаленный ресурс. В одном варианте удаленный ресурс представляет собой удаленный компьютер на месте. В другом варианте удаленный ресурс находится за пределами объекта, например, облачная серверная система. Затем данные обрабатывают и/или отображают, как описано ниже.
[0083] В одном варианте модуль 1806 связи представляет собой модуль сотовой связи. Модуль 1806 связи выполнен с возможностью обмена данными по стандартному протоколу сотовой связи, такому как GSM. На фиг. 22 представлена конвейерная система 100, в которой сенсорные модули 122 содержат модули 1806 сотовой связи. Сенсорные модули 122 обмениваются данными с центральной системой 101 управления через интернет 105 посредством мачты 2201 сотовой связи. В некоторых вариантах модуль 1806 связи выполнен с возможностью обмена данными по глобальной сети малой мощности, такой как LTE САТ-М1 или NB-IoT. Модуль 1806 связи содержит резервный протокол связи, такой как сотовая связь 2G.
[0084] В одном варианте модуль 1806 связи сенсорного контура 1800 содержит радиочастотный датчик 1803. Радиочастотный датчик 1803 выполнен с возможностью определения чипов радиочастотной идентификации поблизости. Чипы радиочастотной идентификации могут быть соединены со сменными деталями вспомогательных устройств 110, 120, 130 и 140. Радиочастотный датчик 1803 обнаруживает присутствие сменной детали путем обнаружения чипа радиочастотной идентификации. Альтернативно или дополнительно, радиочастотный датчик 1803 получает идентификационную информацию от чипа радиочастотной идентификации. Например, радиочастотный датчик 1803 может обнаруживать чип 1629 радиочастотной идентификации, описанный выше, для идентификации номера модели скребкового лезвия 124. Процессор 1802 или центральная система 101 управления использует идентификационную информацию для выбора сохраненных значений, с которыми сравнивают данные от датчиков 1807А.
[0085] В некоторых вариантах радиочастотный датчик 1803 обнаруживает чипы радиочастотной идентификации только в конкретное время, например, когда нажата кнопка на сенсорном модуле 122. Это снижает количество энергии, используемой радиочастотным датчиком 1803, по сравнению с постоянно сканирующим радиочастотным датчиком 1803. Во время работы пользователь нажимает кнопку при установке нового изнашиваемого компонента или сменного компонента, так чтобы привести в действие радиочастотный датчик 1803, который обнаруживает чип радиочастотной идентификации. Радиочастотный датчик 1803 также может задействовать периодически для обнаружения чипа радиочастотной идентификации, так чтобы система 101 управления могла определить, все ли еще сменный компонент присутствует во вспомогательном устройстве.
[0086] Сенсорные модули 112, 122, 132 и 142 могут быть выполнены с возможностью непрерывного измерения данных, но передачи только части данных, чтобы уменьшить количество данных, которые нужно обрабатывать. Например, сенсорный модуль 122 содержит акселерометр 1808 и может каждую секунду производить выборку посылаемых данных и передавать выборочные данные в облачную вычислительную систему 105 для обработки. Выборка данных с фиксированным интервалом позволяет пользователям системы контролировать свои затраты на данные. Однако иногда, дополнительную выборку можно использовать для подтверждения одного или нескольких различных состояний отказа, обсуждаемых подробно ниже. В этом случае облачная вычислительная система 105 или другое внешнее устройство, такое как компьютер, может временно увеличивать частоту выборки конкретного сенсорного модуля 112, 122, 132, 142, чтобы подтвердить наличие состояния отказа. В общем, частоту выборки сенсорных модулей 112, 122, 132 и 142 можно по необходимости увеличивать или уменьшать для конкретных ситуаций. В некоторых вариантах сенсорные модули 112, 122, 132 и 142 сохраняют постоянную частоту выборки для содержащихся в них датчиков 1807А, например, тридцать выборок в секунду, но внутренне обрабатывают данные с уменьшением количества данных, передаваемых сенсорными модулями 112, 122, 132 и 142. Например, обнаруженные значения можно усреднять вместе за период времени с получением одного значения за этот период времени. Другой подход заключается в использовании быстрого преобразования Фурье с уменьшением количества и/или сложности обнаруженных значений.
[0087] Каждое вспомогательное устройство 110, 120, 130, 140 содержит более постоянную деталь, такую как рама или корпус, и сменную деталь, обычно выполненную с возможностью зацепления конвейерной ленты 102. В некоторых вариантах постоянная деталь представляет собой часть рамы 103, на которой установлены вспомогательные устройства 110, 120, 130, 140. Сенсорные модули 112, 122, 132 и 142 могут быть соединены с более постоянными деталями вспомогательных устройств 110, 120, 130, 140 таким образом, что их не нужно заменять при замене сменных деталей.
[0088] Возвращаясь к фиг. 1 В, устройство 120 очистки ленты имеет опорную штангу 126 и одно или несколько сменных скребковых лезвий 124. Скребковые лезвия 124 прижимают к внешней перемещающей поверхности 102О ленты 102 для удаления любого мусора или остатков, которые застревают на ленте 102 после выгрузки с него перемещаемого материала. Трение между скребковыми лезвиями 124 и лентой 102 и/или мусором от материала, перемещаемого лентой 102, с течением времени изнашивают скребковые лезвия 124. Лента 102 также содержит один или несколько стыков. Стыки обычно приподняты относительно внешней поверхности 102О ленты 102. Часто стыки содержат крепежные приспособления, которые соединены с лентой скобами, заклепками или другими крепежными элементами. Зацепление между скребковыми лезвиями 124 и лентой 102 вызывает воздействие скребковых лезвий 124 на стыки, что дополнительно способствует износу или повреждению скребковых лезвий 124. Когда скребковые лезвия 124 слишком изнашиваются или повреждаются, они большее не очищают эффективно ленту 102 и нуждаются в замене.
[0089] Как показано на фиг. 1В и 16А, опорная штанга 126 основного устройства 120А очистки соединена с рамой 103 креплениями 1603, 1604. Опорная штанга 126 не является изнашиваемым компонентом и имеет ожидаемый срок службы, в несколько раз превышающий срок службы скребковых лезвий 124. Как показано на фиг. 2 В, сенсорный модуль 122 содержит корпус 125, выполненный с возможностью соединения с опорной штангой 126, и сенсорный контур 123 внутри корпуса 125. Сенсорный контур 123 по существу аналогичен описанному выше контуру 1800.
[0090] Как показано на фиг. 2А, 2В, корпус 125 содержит установочную часть или вставляемую часть 157, имеющую размер и форму для прохождения по меньшей мере частично в отверстие 156 опорной штанги 126 и образования с ней заглушки. Показанная вставляемая часть 157 имеет по существу круглое поперечное сечение для плотной вставки в по существу круглое отверстие 156. В разных вариантах, в которых опорная штанга 126 имеет отверстие 156 с другой формой, вставляемая часть 157 аналогично имеет поперечное сечение другой формы для соединения с ней. Корпус 125 дополнительно содержит внешнюю часть 158, выполненную с возможностью оставаться снаружи опорной штанги 126. Внешняя часть 158 и вставляемая часть 157 образуют кольцевой паз 159 между ними, в который вставляют часть опорной штанги 126. Внешняя часть 158 содержит гильзу 158А, которая окружает концевую часть 126Е опорной штанги 126 и прочно удерживает сенсорный модуль 122 на опорной штанге 126. Кроме того, для прикрепления сенсорного модуля 122 к опорной штанге 126 можно использовать крепежные приспособления, ремни и/или фиксирующие элементы.
[0091] Корпус 124 выполнен с возможностью выдерживать суровые и/или наружные окружающие условия. Корпус может иметь яркий цвет, например, белый, для уменьшения нагревания сенсорного модуля 122 солнечным светом. Корпус 124 может быть образован из жесткого материала для уменьшения риска разрушения в суровых окружающих условиях конвейерных систем 100, 100А. Иллюстративные материалы включают в себя жесткие композитные материалы, металлические сплавы, металлы или пластмассы. Кроме того, сенсорный контур 123 может быть встроен в заливочный материал для уменьшения вероятности повреждения вибрацией и/или ударами, испытываемыми сенсорным модулем 122.
[0092] Как показано на фиг. 2 В, корпус 125 содержит полость 121, расположенную по меньшей мере частично во вставляемой части 157. Полость 121 имеет размер для приема сенсорного контура 123. В одном варианте источник энергии, такой как аккумуляторы 129, также расположены в полости 121. Альтернативно, корпус 125 содержит отдельные внутренние полости 121 для сенсорного контура 123 и аккумуляторов 129. В одном варианте полость 121 проходит по меньшей мере частично во внешнюю часть 158 за пределы конца паза 159 таким образом, чтобы антенна 128 сенсорного контура 123 располагалась за пределами концевой части 126Е. Таким образом, опорная штанга 126 не блокирует беспроводные сигналы, передаваемые и/или получаемые через антенну 128.
[0093] Во время работы скребковые лезвия 124 вибрируют, когда они скребут по движущейся ленте 102. Вибрация скребковых лезвий 124, в свою очередь, вызывает вибрацию опорной штанги 126 и сенсорного модуля 122, установленного и прикрепленного к концевой части 126Е опорной штанги 126. Если скребковые лезвия 124 становятся слишком тупыми, они будут скользить по мусору на ленте 102 вместо соскребания мусора. Это вызывает иное движение скребка 120, например, за счет поворота опорной штанги 126 на другую угловую величину, и/или иную вибрацию, например, с большей частотой и/или амплитудой, чем когда скребок 120 работает правильно. Альтернативно, скребковые лезвия 124 могут изнашиваться, ломаться или сдвигаться назад в место, в котором скребковые лезвия 124 больше не зацепляют ленту 102. Это вызывает отсутствие вибрации скребка 120 или меньшую вибрацию, чем если бы скребок 120 был в надлежащем рабочем состоянии.
[0094] В одном варианте сенсорный контур 123 содержит процессор 171, выполненный с возможностью сравнения вибрации скребка 120 с приемлемым диапазоном, хранящемся в сенсорном контуре 123. Если вибрация выходит за пределы приемлемого диапазона, обнаруживается одна или несколько неисправностей, и процессор 171 посылает сигнал, указывающий неисправность, посредством передатчика 172, используя антенну 128. Приемлемые диапазоны, сохраненные в сенсорном контуре 123, можно обновлять за счет связи с внешним устройством. В другом варианте сенсорный контур 123 передает исходные данные от датчика 173, такого как акселерометр, а процессор в другом месте, например, в облачной вычислительной системе 105 или в центральном управляющем компьютере, выполняет обработку.
[0095] Сенсорный контур 123 можно использовать для прогнозирования одного или нескольких свойств одного или нескольких компонентов конвейерной системы 100. Например, одно или несколько свойств могут включать в себя, двигается ли конвейерная лента 102 или нет. Когда конвейерная лента 102 двигается, сенсорный модуль 122 вибрирует, и акселерометр в сенсорном контуре 123 может обнаружить по меньшей мере одну характеристику опорной штанги 126, такую как ускорение. Когда сенсорный контур 123 обнаруживает вибрацию с низкой частотой или низкой величиной, он может указывать, что лента 102 двигается под нагрузкой.
[0096] Сенсорный контур 123 можно использовать для прогнозирования других свойств компонентов конвейерной ленточной системы 100. Например, сенсорный контур 123 можно использовать для обнаружения, зацепляет ли устройство 120 очистки ленту 102 или сдвинулось. В одном варианте зацепление обнаруживают на основе вибрации, которую обнаруживает акселерометр 173 сенсорного контура 123. В разных вариантах, в которых устройство 120 очистки ленты поворачивается в зацепление с лентой 102, такое как устройство 120А очистки ленты фиг. 16А, зацепление может быть обнаружено на основании вращения опорной штанги 126. Сенсорный контур 123 может обнаруживать характеристику опорной штанги 126, такую как скорость вращения или положение, с помощью гиродатчика или датчика уровня, такого как ртутный переключатель. В некоторых вариантах сенсорный контур 123 обнаруживает вращение или ориентацию с использованием акселерометра путем отслеживания истории движения. Если для отслеживания ориентации используют акселерометр, сенсорный контур 123 можно периодически калибровать для уменьшения ошибки комбинирования. В другом примере сенсорный контур 123 прогнозирует, когда скребковые лезвия 124 отодвигаются от ленты 102, посредством концевого выключателя, выполненного с возможностью определения полного поворота опорной штанги 126 пружиной 1601.
[0097] Сенсорный контур 123 также может использовать характеристику ориентации опорной штанги 126 для прогнозирования свойства скребковых лезвий 124, такого как уровень износа скребковых лезвий 124. Когда скребковые лезвия 124 изнашиваются, элемент 126 основания поворачивается дальше, удерживая скребковые лезвия 124 в зацеплении с лентой 102.
[0098] Сенсорный контур 123 также может использовать линейное положение линейного смещения устройства 120 В очистки конвейерной ленты (см. фиг. 16 В) для прогнозирования свойств зацепления и износа скребковых лезвий 124 устройства 120 очистки конвейера. Положение опорной штанги 126 относительно рамы 103 показывает, насколько опорная штанга 126 прижата к ленте 102. Это расстояние изменяется, так как скребковые лезвия 124 изнашиваются. Когда опорная штанга 126 достигает конца расстояния своего передвижения, скребковые лезвия 124 изнашиваются до такой степени, когда они более не зацепляют ленту 102 правильно.
[0099] Датчик 173 сенсорного контура 123 может содержать акселерометр. Сенсорный контур 123 может использовать акселерометр для прогнозирования вибрации конвейерной системы 100. Вибрацию, которая представляет собой движение внутри системы, вызванное неровностями одной или нескольких частей (таких как опорные ролики или ведущие ролики), можно прогнозировать с использованием вибрации, обнаруженной акселерометром. Неровность вызывает неравномерное движение детали, что перемещает ленту 102. Лента 102, в свою очередь, перемещает скребковые лезвия 124, которые двигают опорную штангу 126. Акселерометр может обнаруживать как величину, так и частоту вибрации.
[00100] Эффективность одного из устройств 120 очистки ленты может зависеть от натяжения, с которым его направляют в зацепление с лентой 102. В одном варианте сенсорный контур 123 может прогнозировать натяжение устройства 120 очистки ленты на основании частотного отклика опорной штанги 126. Например, если устройство 120 очистки ленты находится под большим натяжением, и скребковые лезвия 124 отталкиваются ударом от конвейерной ленты 102, устройство 120 очистки ленты будет быстро возвращать опорную штангу 126 в первоначальное положение опорной штанги 126 и повторно сцеплять скребковые лезвия 124 с конвейерной лентой 102. И наоборот, если устройство 120 очистки ленты имеет низкое натяжение, устройство 120 очистки ленты будет более медленно возвращать опорную штангу 126 в ее первоначальное положение и повторно сцеплять скребковые лезвия 124 с конвейерной лентой 102.
[00101] В некоторых вариантах датчик 173 сенсорного контура 123 может содержать гироскоп и акселерометр, которые используют для прогнозирования нарушения ориентации ленты 102. Нарушение ориентации ленты 102 может вызвать скручивание скребковых лезвий 124 в результате прикладываемых к ним ассиметричных сил. Гироскоп и/или акселерометр может обнаруживать характеристики опорной штанги 126, когда опорная штанга 126 вибрирует, которые указывают на скручивание скребковых лезвий 124. Аналогично, неравномерно изношенные скребковые лезвия 124 могут вызвать скручивающее или другое движение устройства 120 очистки ленты, которое может быть обнаружено гироскопом и акселерометром сенсорного контура 123.
[00102] Сенсорный контур 123 также можно использовать для прогнозирования других свойств конвейерной системы 100, будь то отсутствие скребкового лезвия 124 (даже если другая часть устройства 120 очистки ленты все-таки контактирует с лентой 102), будь то отсутствие одного из устройств 120 очистки ленты, будь то раскалывание скребкового лезвия 124 (и/или ударные явления, вероятно вызывающие раскалывание скребковых лезвий), будь то колыхание конвейерной ленты 102, и проецирования на оставшийся срок службы конвейерной ленты 102.
[00103] Сенсорный контур 123 также может обнаруживать движение опорной штанги 126, когда скребковые лезвия 124 контактируют со стыком конвейерной ленты 102. В одном варианте центральная система 101 управления идентифицирует стыки на основании профиля движения опорной штанги 126 из-за того, что стык будет в той же самой точке ленты 102 во время каждого полного цикла. Идентификация движений скребковых лезвий 124, вызванных стыками ленты, позволяет центральной системе 101 управления избегать приписывания указанного движения одной из других характеристик, описанных выше, таких как тупое или поврежденное скребковое лезвие 124.
[00104] На фиг. 21 представлены иллюстративные данные от акселерометра датчика 173 сенсорного контура 123, в которых лента 102 конвейерной системы 100 имеет стык ленты. Четыре графика 2101, 2102, 2103 и 2104 отображают, соответственно, амплитуду ускорения в зависимости от времени для натяжения устройства очистки ленты 0%, 50%, 100% и 150%. Натяжение устройства очистки ленты представляет собой величину силы, посредством которой скребковые лезвия 124 прижимают к ленте 102 в виде процентного значения целевого натяжения. Целевое натяжение меняется в зависимости от материала скребковых лезвий 124, материала ленты 102 и перемещаемого материала. Как показано на графике 2101, когда скребковые лезвия 124 не находятся под натяжением, столкновения 2110 со стыком не происходят с постоянными интервалами или амплитудами. Однако, как показано на графиках 2102, 2103 и 2104, когда скребковые лезвия 124 находятся под натяжением, стык ударяет скребковые лезвия по существу при каждом обороте конвейерной ленты, и, таким образом, столкновения происходят с постоянными интервалами. Центральная система 101 управления обрабатывает данные амплитуды ускорения в зависимости от времени для идентификации ускорений, которые происходят с постоянными интервалами. В некоторых вариантах центральная система 101 управления использует значения, представляющие скорость и длину конвейерной ленты 102 для идентификации событий ускорения, которые происходят после каждого оборота. Эти события идентифицируются, как вызванные несовершенством ленты 102, таким как стык. В некоторых вариантах сохраненные значения представляют прогнозируемую амплитуду ускорения устройства 120 очистки ленты в результате столкновения со стыком. Центральная система 101 управления использует эти сохраненные значения для идентификации событий ускорения 2110 в качестве столкновений со стыком.
[00105] На фиг. 21 представлено изменение амплитуды ускорения в результате ударов по мере изменения натяжения. В некоторых вариантах центральная система 101 управления обрабатывает данные акселерометра для прогнозирования натяжения устройства 120 очистки ленты путем сравнения зарегистрированных данных с сохраненными значениями. На графике 2101 удары 2110 при 0% натяжении имели среднюю амплитуду 0,55 м/с2. Удары 2110 при 50% натяжении, см. График 2102, имели среднюю амплитуду 0,71 м/с2. На графике 2103 удары 2110 при 100% натяжении имели среднюю амплитуду 0,94 м/с2. Наконец, на графике 2104 удары 2110 при 150% натяжении имели среднюю амплитуду 1,4 м/с2. Точные амплитуды будут изменяться на основании ряда других факторов, таких как материал стыка, материал лезвия, скорость конвейера, факторы окружающей среды и т.д. Однако, тенденция более высоких величин ускорения в результате удара при более высоких натяжениях позволяет центральной системе 101 управления оценивать натяжение, при учете этих других переменных. Как видно на графике 2104, первые пять ударов 2110 имели среднюю амплитуду приблизительно 3 м/с2. После пятого удара средняя амплитуда падала приблизительно до 1 м/с2. Это неожиданное падение величины может указывать на повреждение лезвия 124 или стык. В некоторых вариантах центральная система 101 управления будет отмечать неожиданное изменение амплитуды, например, изменение, показанное на графике 2104, и передавать предупреждение пользователю.
[00106] Возвращаясь к фиг. 1А и 1В, опорные ролики 130 и ведущие ролики 135 прикреплены с возможностью отсоединения и вращения к раме 103. Ролики 130, 135 могут иметь относительно короткий ожидаемый срок службы в результате трения между внешней поверхностью роликов 130, 135 и лентой 102 и/или износа роликовых подшипников роликов 130, 135. В связи с этим ролики 130, 135 можно заменять много раз на протяжении срока службы конвейерной системы 100. В одном варианте сенсорные модули 132 прикреплены к раме 103 рядом с опорными роликами 130. Движение ленты 102 вдоль опорных роликов 130 вызывает вибрацию роликов 130 и соседних частей рамы 103. Сенсорный модуль 132 содержит акселерометр, выполненный с возможностью измерения вибрации одного из опорных роликов 130. Если внутренние подшипники выходят из строя, опорный ролик 130 может прекратить вращаться или заклинить. Заклинивший опорный ролик 130 может быть обнаружен путем измерения более высокой, чем ожидаемо величины вибрации. Процессор может, либо в сенсорном модуле 132, либо в центральном компьютере, сравнивать данные измеренной вибрации с сохраненным диапазоном, и если измеренная вибрация более или менее сильная, чем сохраненные значения, может быть передано предупреждение, указывающее, что ролик 130 возможно поврежден или заклинил.
[00107] Ролики 130, поддерживающие верхний отрезок конвейерной ленты 102 около его внешних краев, наклонены таким образом, что внешние концы роликов 130 расположены выше, чем внутренние концы. Эта конфигурация частично заворачивает стороны ленты 102, придавая ленте 102 в общем U-образное или желобообразное поперечное сечение. Желобообразное поперечное сечение снижает количество материала, который рассыпается с ленты 102.
[00108] Возвращаясь к фиг. 1С, амортизирующая платформа 110 имеет одну или несколько упругих опор или амортизирующих балок 114 для поддержки внутренней поверхности 1021 верхнего отрезка 201 конвейерной ленты 102L, где материал падает через желоб 108 и на конвейерную ленту 102L. В одном варианте амортизирующие балки 114 прикреплены к раме 116, которая, в свою очередь, подвижно прикреплена к раме 203. Раму 116 можно прикреплять к раме 203 посредством пружин, которые обеспечивают сдвиг вниз рамы 116 и амортизирующих балок 114 для амортизации удара, а затем возврат амортизирующих балок 114 в первоначальные положения. Кроме того, амортизирующие балки 114 могут иметь многослойную структуру, содержащую верхний, контактирующий с лентой слой, сделанный из нейлона или тефлона, и упругий нижний слой, который прикреплен к раме 116. Упругий нижний слой может быть сделан, например, из эластомерного материала. Упругий нижний слой обеспечивает сжатие амортизирующих балок 114 для амортизации некоторой части ударной силы материала. Упругий нижний слой амортизирующих балок 114 может разжиматься при устранении ударной силы. Амортизирующие балки 114 могут представлять собой сменные элементы, которые изнашиваются с течением времени в результате ударов перемещаемого материала, а также трения со стороны ленты 102. Амортизирующие балки 114 могут быть соединены с возможностью снятия с рамой 116 таким образом, что их можно заменить без замены рамы 116. Амортизирующие платформы описаны в патенте США №7815040, который полностью включен в данный документ посредством ссылки.
[00109] Во время работы материал, падающий по желобу 108 и на внешнюю поверхность 102О ленты 102, вызывает сдвиг вниз ленты 102 и амортизирующих балок 114 и рамы 116 амортизирующей платформы 110. Амортизирующая платформа 110 затормаживает амортизирующие балки 114 и раму 116, а затем смещает амортизирующие балки 114 и раму 116 назад вверх в ее первоначальное положение. Амортизирующая платформа 110 может содержать сенсорный модуль 112, прикрепленный к раме 116. Сенсорный модуль 112 по существу похож на сенсорный модуль 122 и содержит сенсорный контур, аналогичный сенсорным контурам 123, 1800, обсуждавшимся выше. Сенсорный контур сенсорного модуля 112 может содержать акселерометр, такой как акселерометр 1808, и модуль связи, такой как модуль 1806 связи. Сенсорный модуль 112 может содержать процессор, такой как процессор 1802. Процессор сенсорного модуля 112 и/или процессор в вычислительном устройстве за пределами сенсорного модуля 112 сравнивает данные от акселерометра с сохраненными исходными значениями. В некоторых вариантах процессор (процессоры) использует дополнительные данные, представляющие расчет времени и массу полезного грузка, сбрасываемого на конвейерную ленту 102L, для расчета ожидаемого движения амортизирующей платформы 110. Если рама 116 двигается меньше или больше, чем диапазон ожидаемых значений, процессор (процессоры) определяют, что амортизирующая платформа 110 находится в неисправном состоянии, и пользователю направляется предупреждение.
[00110] Как показано на фиг. 11, конвейерные системы 100, 100А могут использовать одно или несколько устройств 140 слежения за лентой для сохранения движения конвейерных лент 102, 102U, 102L по заданной траектории. Устройство 140 слежения за лентой содержит опорный ролик 1144, прикрепленный к поворотной раме 1146 для поддержки нижней поверхности конвейерной ленты 102, 102U и 102L, и боковые ролики 1145А, 1145В. Поворотная рама 1146 шарнирно соединена с опорой 1147, которая проходит вбок поперек конвейерной ленты 102, 102U, 102L. Опору 1147 поддерживают крепления 1103, соединенные с рамой 103, связанной с конвейерной лентой 102, 102U, 102L. Поворотное соединение между рамой 1146 и опорой 1103 обеспечивает поворот рамы 1146 вокруг оси 1146А.
[00111] Когда лента 102, 102U, 102L сползает в боковом направлении 102 В, лента 102, 102U, 102L контактирует с боковым роликом 1145А, вызывая поворот рамы 1146 относительно рамы 103 конвейера. Поворот рамы 1146 перемещает боковой ролик 1145А вверх относительно рамы 103 конвейера и дальше в направлении движения конвейерной ленты 102, 102U, 102L. Из-за того, что опорный ролик 1144 также прикреплен к раме 1146, концевая часть 1148 опорного ролика 1146 около бокового ролика 1145А также перемещается вверх относительно рамы 103 конвейера и вперед по технологическому маршруту. И наоборот, поворот рамы 1146 вследствие контакта конвейерной ленты 102, 102U, 102L с боковым роликом 1145 перемещает боковой ролик 1145 В и концевую часть 1149 опорного ролика 1144 около бокового ролика 1145 вниз относительно рамы 103 конвейера и назад по технологическому маршруту. Этот поворот рамы 1146 и связанных роликов 1144, 1145А, 1145 В перенаправляет или толкает ленту 102, 102U, 102L назад в центральное положение.
[00112] С течением времени опорный ролик 1144 и боковые выполняющие роль датчиков ролики 1145А, 1145В могут изнашиваться, причем их внешние поверхности 1143 имеют относительно короткий ожидаемый срок службы. Рама 1146 имеет существенно больший ожидаемый срок службы. Устройство 140 слежения за лентой может содержать сенсорный модуль 142, соединенный с поворотной рамой 1146. Сенсорный модуль 142 может быть по существу аналогичен сенсорному модулю 122 и содержать сенсорный контур, такой как сенсорный контур 1800. Сенсорный контур сенсорного модуля 142 может содержать процессор, беспроводной передатчик и датчик, такой как акселерометр. Датчик сенсорного модуля 142 обнаруживает направление поворота рамы 1146, а также величину шарнирного движения рамы 1146. Процессор сенсорного модуля 142 и/или удаленный процессор во внешнем вычислительном устройстве анализирует одну или несколько характеристик поворота рамы 1146 с течением времени, таких как частота, направление и ускорение. Высокая частота поворота рамы 1146 в одном направлении может указывать на проблему с конвейерной системой 100, 100А, которая вызывает непрерывное сползание ленты 102, 102U, 102L. Альтернативно, очень небольшой поворот или его отсутствие может указывать на неисправность устройства 140 отслеживания, такую как застревание шарнирного соединения между рамой 1146 и опорой 1147. В некоторых вариантах сенсорный модуль 142 измеряет вибрацию устройства 140 отслеживания. Большая вибрация может указывать, что ролик 1144 больше не вращается свободно.
[00113] На фиг. 12 представлено устройство 1240 слежения за лентой, используемое вместо устройства 140 слежения за лентой. Устройство 1240 слежения за лентой во многих отношениях похоже на устройство 140 слежения за лентой. Устройство 1240 слежения за лентой содержит два опорных ролика 1244А, 1244В, соединенных с возможностью снятия с поворотной рамой 1246. Рама 1246 шарнирно соединена с опорой 1247, которая, в свою очередь, соединена с рамой 103 конвейера с помощью креплений 1203. Когда лента 102 сползает в одном боковом направлении на один из роликов 1244А, 1244В, рама 1246 поворачивается вокруг оси 1246А, что перемещает один ролик 1244А, 1244В в направлении движения конвейерной ленты 102, 102U, 102L по технологическому маршруту. Поворот рамы 1246 вокруг оси 1246А также может вызвать наклон одного ролика 1244А, 1244 В, так что один ролик 1244А, 1244 В поднимается относительно другого ролика 1244А, 1244В. Поворачивающиеся ролики 1244А, 1244В смещают ленту 102, 102U, 102L в нужное центральное положение ленты 102, 102U, 102L. Устройство 1240 слежения за лентой также может содержать сенсорный модуль 142А, прикрепленный к поворотной раме 1246. Сенсорный модуль 142А похож на сенсорный модуль 142 устройства 140 слежения за лентой.
[00114] Как показано на фиг. 3, контролирующее устройство 10 может обеспечить сеть взаимосвязанных устройств для мониторинга одной или нескольких характеристик одного или нескольких компонентов конвейерных систем 100, 100А. Например, сенсорные модули 112, 122, 132, 142, связанные с амортизирующими платформами 110, устройствами 120 очистки ленты, опорными роликами 130 и устройствами 140 слежения за лентой, передают данные на узел 104 беспроводной связи. Узел 104 беспроводной связи, в свою очередь, передает данные от сенсорных модулей 112, 122, 132 и 142 на удаленный компьютер, такой как облачная вычислительная система 105. В одном варианте узел 104 беспроводной связи может передавать данные от сенсорных модулей 112, 122, 132 и 142 в одно или несколько портативных вычислительных устройств, таких как смартфоны 106. Кроме того, узел 104 беспроводной связи может предоставлять в сенсорные модули 112, 122, 132, 142 такие данные, как регулирование пороговых значений для сенсорных модулей 112, 122, 132, 142 или предоставление программного обеспечения или обновление встроенного программного обеспечения.
[00115] Контролирующее устройство 10 содержит центральную систему 101 управления, которая получает данные из облачной вычислительной системы 105 и предоставляет соответствующую информацию в один или несколько компьютеров 107. Система 101 управления содержит по меньшей мере один процессор, по меньшей мере одно запоминающее устройство (например, машиночитаемое запоминающее устройство для долговременного хранения, такое как RAM, твердотельный диск или магнитный диск) и схему связи (например, схему WiFi, порт Ethernet или схему сотовой связи), выполненную с возможностью обмена данными с облачной вычислительной системой 105. По меньшей мере одно запоминающее устройство системы 101 управления представляет собой машиночитаемый носитель для долговременного хранения, такой как магнитный диск. Компьютер 107 может содержать экран, динамик и т.д. Компьютер 107 может предоставлять информацию пользователю с использованием различных подходов, таких как использование визуальных, аудио и/или тактильных подходов. В одном варианте компьютер 107 содержит один или несколько экранов компьютера, а информация, соответствующая данным от сенсорных модулей 112, 122, 132, 142, визуально отображается на экранах компьютеров, например, посредством браузера интернета.
[00116] Система 101 управления обрабатывает данные от сенсорных модулей 112, 122, 132 и 142 для определения одной или нескольких характеристик одного или нескольких компонентов конвейерной системы 100, 100А, таких как амортизирующая платформа 110, устройства 120 очистки конвейерной ленты и опорные ролики 130. В одном варианте сенсорные модули 112, 122 и 132 содержат акселерометры. В системе 101 управления на протяжении некоторого времени сохраняются данные от датчиков 112, 122 и 132, и она использует данные для оценки оставшегося срока эксплуатации амортизирующей платформы 110, устройств 120 очистки конвейерной ленты и опорных роликов 130. Например, когда скребковое лезвие 124 устройства 120 очистки конвейерной ленты затупляется, увеличивается расстояние поворота, на которое перемещается опорная штанга 126 устройства 120 очистки конвейерной ленты. В определенный момент скребковому лезвию 124 потребуется заточка или замена. Система 101 управления экстраполирует данные от сенсорного контура 123 сенсорного модуля 122 для оценки, когда скребковому лезвию 124 потребуется замена или заточка. Эту оценку используют для планирования технического обслуживания, чтобы починить устройство 120 очистки конвейерной ленты перед поломкой, снижая таким образом риск выхода из строя устройства 120 очистки конвейерной ленты, что вызывает дополнительное повреждение конвейерной системы 100, 100А. Система 101 управления аналогичным образом может производить оценку, когда требуется техническое обслуживание для других вспомогательных устройств, таких как амортизирующая платформа ПО, опорные ролики 130 и ведущий ролик 135, на основании данных от связанных сенсорных модулей 112, 122, 132, 142.
[00117] В некоторых вариантах система 101 управления представлена в помещении для управления на том же объекте, что и связанная конвейерная система 100, 100А. Альтернативно, система 101 управления находится в месте, которое географически удалено от объекта конвейерной системы 100, 100А. За счет географического удаления предполагается, что система 101 управления отделена от связанной конвейерной системы 100, 100А на одну или более миль, две или более мили, три или более мили, сотни миль или даже находится на других континентах. Система 101 управления при удаленном расположении от объекта конвейерной системы 100, 100А может контролировать конвейерные системы в географически рассредоточенных местоположениях.
[00118] Как показано на фиг. 5-10, представлены иллюстрации иллюстративного экрана компьютера 107 системы 101 управления, чтобы показать другие пути, с помощью которых информацию, соответствующую данным от сенсорных модулей 112, 122, 132 и 142, можно отображать пользователю. Как показано на фиг. 5-7, система 101 управления может отображать постоянную информацию в реальном времени о множестве вспомогательных устройств. Как показано на фиг. 8-10, система 101 управления обеспечивает обмен данными периодически, например, в заданное время или при совпадении определенных условий. Эти сообщения можно передавать пользователю таким образом, чтобы информировать пользователя о состоянии, даже если пользователь не находится за своим настольным компьютером. Альтернативно, пользователь может извлекать информацию для пользователя, например, с помощью запроса информации о состоянии с использованием смартфона 106 (см. фиг. 10). В некоторых вариантах система 101 управления отображает постоянную информацию в реальном времени и предоставляет информацию пользователю в случае возникновения конкретного состояния.
[00119] Как показано на фиг. 5-7, показан компьютер 107, отображающий оставшийся срок эксплуатации вспомогательных устройств конвейерных систем 100, 100А. На фиг. 5, в таблице 500 представлена имеющаяся информация о каждом вспомогательном устройстве. Информация содержит идентификационную информацию, такую как местоположение 552 и идентификационный номер 554, дату 556 установки и оценку оставшегося срока эксплуатации 558 в днях или неделях. В некоторых вариантах таблица имеет цветовую кодировку для привлечения внимания к устройствам, которым требуется немедленное техническое обслуживание. Например, устройства, которые в настоящее время находятся в неисправном состоянии, обозначены красным цветом, а устройства, имеющие короткий оставшийся срок службы, обозначены желтым или оранжевым цветом.
[00120] Как показано на фиг. 6, на компьютере 107 представлена столбчатая диаграмма 600, показывающая процентное значение оставшегося срока службы для каждого вспомогательного устройства. Аналогично таблице 500 график 600 содержит идентификационную информацию 652 и 654, дату 656 установки и столбик 658, показывающий процентное значение оставшегося срока службы. В некоторых вариантах столбики 658 имеют цветовую кодировку, как указано выше, для привлечения внимания к вспомогательным устройствам, которым требуется немедленное техническое обслуживание, или техническое обслуживание потребуется в скором времени.
[00121] На фиг. 7 представлена карта 700 или спутниковый вид объекта или рабочего участка, где расположены одна или несколько конвейерных систем 100, 100А. На карте 700 расположены индикаторы 750 в местоположении вспомогательных устройств, имеющих сенсорные модули. Когда пользователь нажимает на индикатор 750 одного из вспомогательных устройств или наводит на индикатор 750 указатель мыши, система 101 управления отображает дополнительную информацию о соответствующем вспомогательном устройстве, такую как информация в таблице 500 или на графике 600, например, идентификационную информацию и оставшийся срок эксплуатации. Индикаторы 750 имеют цветовую кодировку, указывающую на текущее состояние, например, зеленый, что все в порядке, желтый для короткого оставшегося срока эксплуатации, а красный для неисправности.
[00122] В одном варианте система 101 управления использует дополнительную информацию для оценки или прогнозирования оставшегося срока эксплуатации вспомогательных устройств. Как показано на фиг. 4, представлено контролирующее устройство 400, которое во многих отношениях похоже на контролирующее устройство 10, обсуждавшееся выше, и содержит множество таких же компонентов, таких как система 101 управления, компьютер 107, узел 104 беспроводной связи, облачная вычислительная система 105 и сенсорные модули 112, 122, 132, 142. Контролирующее устройство 400 дополнительно содержит облачную вычислительную систему 105, данные из которой дополнительно передаются в систему 101 управления. Иллюстративные данные включают в себя состояние ленты, например, движется или остановлена, скорость ленты, массу перемещаемого материала и погодные условия. Погодные условия и другие факторы окружающей среды можно определить на основании датчиков окружающей среды, таких как датчики дождя, датчики температуры и датчики влажности, расположенные в конвейерной системе 100, 100А или около нее. Альтернативно или дополнительно, система 101 управления извлекает информацию об окружающей среде из интернета на основании местоположения конвейерной системы 100, 100А. Система 101 управления изменяет значения, с которыми сравнивают измеренные данные, на основании дополнительной информации из системы 105. Например, система 101 управления ожидает, что скребок 120 и опорные ролики 130 будут двигаться больше, когда лента 102 двигается быстрее. В качестве другого примера, система 101 управления дополнительно ожидает, что амортизирующая платформа 110 будет двигаться больше, когда на ленту нагружен больший полезный груз.
[00123] В некоторых вариантах облачная вычислительная система 105 содержит запоминающее устройство, хранящее будущий план для конвейерной системы 100. План содержит часы работы, скорость работы и массу материала для конвейерной системы 100. Система 101 управления рассчитывает оценочный оставшийся срок эксплуатации одного или нескольких вспомогательных устройств на основании запланированной рабочей нагрузки на конвейерную систему.
[00124] В дополнение к идентификации износа, как описано выше, контролирующее устройство 400 использует данные от сенсорных модулей 112, 122, 132, 142 для идентификации аномальных тенденций. Например, данные от акселерометра сенсорного модуля 142 содержат измерение движения устройства 140 слежения за конвейерной лентой и сравнение движения с историческими данными и/или сохраненными пороговыми значениями для определения, насколько часто в настоящее время происходит корректировка ленты 102 по сравнению с ожидаемой частотой корректировки. Повышенная частота корректировок устройством 140 слежения за конвейерной лентой показывает, что что-то вызывает сползание конвейерной ленты 102 или тянет ее в одном боковом направлении. Система 101 управления предупреждает пользователя либо посредством компьютера 107, либо смартфона 106. Затем можно провести техническое обслуживание конвейерной системы 100 для идентификации и исправления причины натяжения до того, как натяжение вызовет преждевременный износ ленты 102 и/или устройства 140 слежения за конвейерной лентой.
[00125] Как показано на фиг. 8-10, система 101 управления может обеспечить связь в виде уведомлений 800, 900 по электронной почте или уведомлений 1000 в виде смс от системы 101 управления пользователю. В некоторых вариантах, таких как на фиг. 9, уведомления 800, 900 по электронной почте или уведомления 1000 в виде смс посылаются периодически для передачи рабочей информации. Например, графики 960 уведомлений 900 по электронной почте указывают на величину использования каждой из множества лент 102, происходящего в течение заданного периода времени. Связь также может содержать информацию о техническом обслуживании, такую как количество неисправностей, идентифицированных сенсорными модулями, и/или количество вспомогательных устройств, подлежащих ремонту или замене. В других примерах представленная информация включает в себя таблицу 500 или диаграмму 600, иллюстрирующую текущий оставшийся срок эксплуатации множества устройств.
[00126] Система 101 управления может передавать уведомление 800 по электронной почте или уведомление 1000 в виде смс, когда вспомогательное устройство выходит из строя или достигает заданного уровня оставшегося срока эксплуатации. Например, система 101 управления может прогнозировать срок эксплуатации для нескольких устройств, как описано выше, и посылать обслуживающему персоналу сообщение по электронной почте или в виде смс за одну неделю перед ожидаемым выходом из строя. Кроме того, система 101 управления может посылать по электронной почте или в виде смс сообщение менеджеру или контролеру, когда происходит неисправность, чтобы конвейерную систему 100, 100А можно было отключить, чтобы избежать дополнительного повреждения.
[00127] На фиг. 13А-13С представлен сенсорный модуль 1305, имеющий сенсорный контур 1302 внутри корпуса 1304, выполненного с возможностью соединения с элементом основания устройства 120 очистки конвейерной ленты, таким как опорная штанга 1306. Сенсорный модуль 1305 во многих аспектах действует аналогично сенсорному модулю 122, обсуждавшемуся выше, а сенсорный контур 1302 аналогичен сенсорному контуру 1800. Сенсорный модуль 1305 содержит корпус 1304, имеющий в общем кольцевую форму с выходящим наружу выступом, который вмещает сенсорный контур 1302. Корпус 1304 имеет центральное отверстие 1307 и кольцевую муфтовую часть 1381, проходящую вокруг центрального отверстия 1307, выполненную с возможностью приема концевой части 1306Е опорной штанги 1306. В одном варианте муфтовая часть 1381 содержит щель 1311, проходящую по всей длине муфтовой части 1381. Муфтовую часть 1381 корпуса 1304 можно изгибать с помощью щели 1311 для плотной установки поверх опорной штанги 1306, имеющей другой размер. В одном варианте корпус 1304 обеспечивает доступ к внутренней части опорной штанги 1306, например, через центральное отверстие 1307, чтобы внутреннюю часть опорной штанги 1306 можно было очистить.
[00128] В одном варианте сенсорный модуль 1305 установлен на концевой части 1306Е опорной штанги 1306. В другом варианте сенсорный модуль 1305 продвигают дальше по опорной штанге 1306. Положение сенсорного модуля 1305 вдоль опорной штанги 1306 может влиять на движение сенсорного модуля 1305 и соответствующие данные, предоставляемые сенсорным модулем 1305. Например, дистальная концевая часть 1306Е опорной штанги 1306 может иметь большую амплитуду движения, чем часть опорной штанги 1306 ближе к соответствующему креплению, соединяющему опорную штангу 1306 с рамой 103 конвейера. Гармонические колебание опорной штанги 1306 также могут влиять на движение сенсорного модуля 1305. Если сенсорный модуль 1305 расположен рядом с узлом гармонических колебаний опорной штанги 1306, который представляет собой положение на конструкции, где минимизирована вибрация, сенсорный модуль 1305 будут испытывать меньшую вибрацию, чем сенсорный модуль 1305, отстоящий от узлов гармонических колебаний.
[00129] В одном варианте корпус 1304 содержит соединительный узел 1382, выполненный с возможностью закрепления сенсорного модуля 1305 на опорной штанге 1306. В одном варианте соединительный узел 1382 содержит крепежное приспособление, такое как болт 1318, выполненный с возможностью прохождения через отверстия 1308А для болта корпуса 1304 и отверстия 1308 В для болта опорной штанги 1306. Соединительный узел 1382 также может содержать гайку 1319, которая зацепляет резьбовой хвостовик болта 1318. Затягивание гайки 1319 на болте 1318 зажимает муфтовую часть 1381 вокруг опорной штанги 1306, уменьшает ширину щели 1311 и закрепляет сенсорный модуль 1305 на опорной штанге 1306. Это зажимает корпус 1304 на опорной штанге 1306 и противодействует повороту корпуса 1304 вокруг опорной штанги 1306 и осевому движению корпуса 1304 по длине опорной штанги 1306. В другом варианте по меньшей мере одно из отверстий 1308А, 1308В является резьбовым, чтобы обеспечить резьбовое зацепление болта 1318.
[00130] В одном варианте корпус 1304 имеет по меньшей мере одну по существу плоскую сторону 1304F. Когда сенсорный модуль 1305 отсоединен от элемента основания 1306, сенсорный модуль 1305 может располагаться на его по существу плоской стороне 1304F для уменьшения случаев скатывания или скручивания с поверхности, на которой находится сенсорный модуль 1305.
[00131] Как показано на фиг. 13В, сенсорный контур 1302 содержит модуль связи, а в некоторых вариантах осуществления процессор. Сенсорный модуль 1305 дополнительно содержит источник энергии, такой как аккумуляторы 1309. Альтернативно или дополнительно, источником энергии может быть силовой кабель, такой как кабель 1409 на фиг. 14. В некоторых вариантах аккумуляторы 1309 находятся в отдельном отделении корпуса 1304, а не в отделении, используемом для размещения сенсорного контура 1302 и других электронных компонентов. Это разделение защищает электронику во время движения аккумуляторов, сверхнагревания аккумуляторов или пробоя аккумуляторов. В одном варианте сенсорный контур 1302 сенсорного модуля 1305 содержит схему беспроводной связи, содержащую антенну, расположенную снаружи опорной штанги 1306 для уменьшения помех при беспроводном соединении.
[00132] В некоторых вариантах сенсорный модуль 1305 содержит индикатор 1301, выполненный с возможностью отображения одного или нескольких состояний сенсорного модуля 1305. Иллюстративные состояния, подлежащие отображению, включают в себя срок годности аккумулятора, силу сигнала или возможность соединения и калибровку. Сенсорный модуль 1305 может предусматривать ручной ввод, такой как кнопка 1303. Кнопку 1303 можно использовать для управления одной или несколькими функциями сенсорного модуля 1305, такими как сброс беспроводного соединения, сброс одного или нескольких датчиков сенсорного модуля 1305 и отображение контролируемого состояния с использованием индикаторов 1301.
[00133] Сенсорный модуль 1305 может быть выполнен с возможностью конкретного использования. Например, если сенсорный модуль 1305 должен быть установлен вне помещения, корпус 1304 может иметь яркий цвет, например, белый для уменьшения нагревания сенсорного модуля 1305 солнечным светом. Корпус 1304 образован из жесткого материала для уменьшения риска разрушения в суровых окружающие условия конвейерных систем 100, 100А. Иллюстративные материалы включают в себя жесткие композитные материалы, металлические сплавы, металлы и/или пластмассы. Корпус 1304 может иметь толстостенную конструкцию для обеспечения прочности. Одна или несколько частей корпуса 1304 могут быть герметичными для противодействия прониканию материалов. В предпочтительном варианте корпус 1304 имеет степень защиты от проникания («IP») по меньшей мере 54 (защита от пыли 5, защита от воды 4). В более предпочтительном варианте корпус 1304 имеет степень защиты IP66.
[00134] Как показано на фиг. 15, представлен сенсорный модуль 1505, который во многих отношениях похож на сенсорный модуль 1405, обсуждавшийся выше. Одно отличие между сенсорными модулями 1405, 1505 состоит в том, что сенсорный модуль 1505 содержит корпус 1504, который проходит по меньшей мере частично в отверстие 1306О опорной штанги 1306. Корпус 1504 содержит первую часть или вставляемую часть 1507, имеющую размер и выполненную с возможностью вставки в отверстие 1306О опорной штанги 1306 и образования с ним заглушки. Корпус 1504 дополнительно содержит вторую часть или часть 1508 в виде фланцевой пластины, которая проходит радиально за пределы внешней поверхности вставляемой части 1507 таким образом, что фланцевая часть 1508 образует стопор во время вставки, предотвращая полную вставку сенсорного модуля 1505 в опорную штангу 1306.
[00135] Установка вставной части 1507 корпуса 1504 в опорную штангу 1306 уменьшает пространство, занимаемое узлом, а также обеспечивает дополнительную защиту для части сенсорного модуля 1505 внутри опорной штанги 1306. Сенсорный модуль 1505 содержит сенсорный контур, аналогичный сенсорному контуру 1800, и содержит аналогичные компоненты, например, датчик (датчики), источники энергии, антенну, процессор (процессоры) и т.д., и, таким образом, его можно использовать в качестве сенсорных модулей 112, 122, 132 и 142, описанных выше. Как и в сенсорном модуле 122 в одном варианте антенна сенсорного модуля 1505 расположена снаружи опорной штанги 1306 для уменьшения помех от нее.
[00136] На фиг. 20А-20В представлена часть устройства 2020 очистки ленты, которое содержит опорную штангу 2006 и крепления 2069 для упругого прижимания скребкового лезвия устройства 2020 очистки ленты к конвейерной ленте. Каждое крепление 2069 содержит натяжной кронштейн 2070 и сенсорный модуль 2005. Натяжной кронштейн 2070 соединен с опорной штангой 2006 с помощью установочного винта или болта 2081 таким образом, что вращение опорной штанги 2006 вокруг центральной, продольной оси 2006А опорной штанги 2006 вызывает вращение натяжного кронштейна 2070.
[00137] Натяжной кронштейн 2070 содержит первую часть, такую как муфтовая часть 2071, выполненная с возможностью установки поверх конца опорной штанги 2006, и вторую часть, такую как крыльеобразная часть 2072, проходящую от нее радиально. Болт 2081 проходит через кольцевую часть 2071. В некоторых вариантах опорная штанга 2006 и муфтовая часть 2071 имеют шпоночное зацепление для ограничения вращения натяжного кронштейна 2070 относительно опорной штанги 2006.
[00138] Крыльеобразная часть 2072 содержит отверстие, такое как прорезь 2074. Каждое крепление 2069 дополнительно содержит болт 2082, проходящий через отверстие 2074, и пружину 2001, проходящую вдоль части болта 2082. Пружина 2001 зацепляет крыльеобразную часть 2072, прикладывая смещающую силу к натяжному кронштейну 2070 и придавая опорной штанге 2006 крутящий момент. В одном варианте крепление 2069 содержит стопор 2083, такой как гайка в зацеплении с болтом 2082, и шайбу, ограничивающую расстояние, на которое натяжной кронштейн 2070 может поворачиваться вокруг оси 2006А. Болт 2082 дополнительно содержит крепежную конструкцию 2084, выполненную с возможностью соединения с рамой 103 конвейера.
[00139] Сенсорный модуль 2005 прикреплен к натяжному кронштейну 2070. Установка сенсорного модуля 2005 на важный компонент устройства 2020 очистки ленты, такой как натяжной кронштейн 2070, снижает вероятность непреднамеренного оставления сенсорного модуля 2005 устройства 2020 очистки ленты после технического обслуживания. Как показано на фиг. 20В, натяжной кронштейн 2070 содержит стенку 2079, образующую паз 2073. Сенсорный модуль 2005 содержит корпус 2004, имеющий часть 2011 основания, имеющую форму и размер для установки внутри паза 2073. Корпус 2004 дополнительно содержит укрупненную, верхнюю часть 2007, имеющую фланец 2007, выполненный с возможностью опоры на верхнюю часть стенки 2079. Крепежные приспособления, такие как винты или болты 2008, проходят через фланец 2007 в стенку 2079 для прикрепления сенсорного модуля 2005 с возможностью снятия к натяжному кронштейну 2070. Можно использовать другие подходы, такие как ремни или сварные швы.
[00140] Сенсорный модуль 2005 по существу аналогичен сенсорным модулям 122, 1305 и 1405, описанным выше. Корпус 2004 содержит внутреннюю полость, вмещающую сенсорный контур аналогичный сенсорному контуру 1800. Сенсорный контур содержит датчик, схему беспроводной связи и один или несколько датчиков, таких как гироскоп и акселерометр. Процессор получает данные от датчиков и передает полученные данные посредством схемы беспроводной связи, как описано выше. Сенсорный модуль 2005 также может содержать источник энергии. В одном варианте источником энергии является один или несколько аккумуляторов. Аккумуляторы расположены в корпусе 2004. В некоторых вариантах аккумуляторы находятся в отдельной от сенсорного контура полости.
[00141] Во время работы акселерометр и/или гироскоп измеряет вращение натяжного кронштейна 2070 вокруг оси 2006А. Из этого вращения процессор, такой как процессор системы 101 управления, определяет состояние устройства 2020 очистки ленты и конвейерной системы 100. Например, ориентацию натяжного кронштейна 2070 можно использовать для определения состояния износа скребковых лезвий, как описано выше.
[00142] В отличие от сенсорных модулей 122, 1305, 1405, описанных выше, сенсорный модуль 2005 не может проходить мимо конца опорной штанги 2006. Это уменьшает общую длину устройства 2020 очистки ленты. Движение сенсорного модуля 2005 от конца опорной штанги 2006 также может защищать сенсорный модуль 2005 от ударов, когда что-то ударяет конец опорной штанги 2006. В одном варианте сенсорный модуль 2005 не блокирует или не ограничивает доступ к концу опорной штанги 2006 и к его внутренней части.
[00143] В некоторых вариантах существующее устройство очистки ленты оснащают сенсорным модулем 2005. Существующий натяжной кронштейн заменяют натяжным кронштейном 2070, имеющим сенсорный модуль 2005. Опорная штанга 2006 не требует замены или модификации, так как муфтовая часть 2071 выполнена с возможностью соединения с существующими опорными штангами 2006.
[00144] Как показано на фиг. 20 В, в одном варианте натяжение устройства 2020 очистки ленты можно измерить с помощью расстояния между сенсорными частями 2091 и 2092, связанными с сенсорным модулем 2005. Сенсорные части 2091 и 2092 расположены рядом с противоположными концами пружины 2001. Определяют расстояние между сенсорными частями 2091 и 2092, так как длину пружины 2001 можно использовать для расчета прикладываемой ей силы. В некоторых вариантах сенсорные части 2901 и 2902 расположены в стопоре 2083 и болте 2082, соответственно. Сенсорная часть 2091 может представлять собой измерительный компонент, а сенсорная часть 2092 может представлять собой определяемый компонент. В некоторых вариантах определяемая часть 2092 содержит постоянный или электрический магнит, а измерительная часть 2091 содержит датчик, выполненный с возможностью определения магнитного поля, создаваемого определяемой частью 2092. Сила обнаруженного магнитного поля соответствует расстоянию между ними.
[00145] В некоторых вариантах сенсорный модуль 2005 содержит датчик или переключатель для защиты от постороннего вмешательства. Переключатель для защиты от постороннего вмешательства выполнен с возможностью определения, когда сенсорный модуль 2005 снимают с натяжного кронштейна 2070. Когда сенсорный модуль 2005 снимают, процессор сенсорных модулей 2005 задействует его схему беспроводной связи для передачи предупреждения в центральную систему 101 управления и/или в пользовательское устройство. В одном варианте осуществления датчик или переключатель для защиты от постороннего вмешательства представляет собой магнитометр, герконовый переключатель или механический переключатель, который срабатывает, когда сенсорный модуль 2005 снимают с натяжного кронштейна 2070.
[00146] Альтернативно или дополнительно, облачная вычислительная система 105 идентифицирует постороннее вмешательство с использованием данных датчика из сенсорного модуля 2005. Например, большой скачок ускорения, сопровождаемый данными, несовместимыми с ожидаемыми значениями ускорения, показывает, что сенсорный модуль 2005 был сбит с устройства 2020 очистки ленты. Облачная вычислительная система 105 передает предупреждение в центральную систему 101 управления и останавливает искажение обрабатываемых данных сенсорным модулем 2005 до тех пор, пока ввод пользователя не покажет, что на устройстве 2020 очистки ленты сенсорный модуль 2005 был переустановлен.
[00147] Сенсорный модуль 2005 соединен с устройством 2020 очистки ленты. В других вариантах сенсорный модуль 2005 может быть соединен с другими вспомогательными устройствами, имеющими аналогичный паз 2073.
[00148] Хотя опорные штанги на фиг. 2А-2В, 13А-15 и 20А-20В показаны цилиндрическими, понятно, что можно использовать имеющие иную форму опорные штанги за счет изменения формы корпусов 1304, 1504, 125 сенсорных модулей 1305, 1505, 122. Например, корпуса 1304, 1504, 125 могут иметь форму и быть выполнены с возможностью соединения с квадратными трубчатыми, плоскими железными или изогнутыми железными элементами основания.
[00149] Что касается фиг. 17А-17С, представлен способ мониторинга состояния ленты 102 конвейерной системы 100, 100А на объекте. Пользователь открывает приложение 1700 мониторинга конвейера на смартфоне 106 или другом мобильном вычислительном устройстве, таком как планшетный компьютер. Планшет или смартфон 106 содержит камеру. Затем пользователь вводит свое местоположение на объекте, например, идентификационный номер инспектируемой конвейерной ленты 102. В одном подходе пользователь вводит идентификационную информацию местоположения и/или конвейерной ленты 102 путем сканирования бар кода, метки радиочастотной идентификации или QR кода 1701, установленного на конвейерной системе 100 или около нее, с помощью смартфона 106, как показано на фиг. 17 В.
[00150] Как показано на фиг. 17С, пользователь делает один или несколько снимков и/или снимает видео внешней поверхности 102О обратного отрезка ленты 102. Затем снимок и/или видео передают с помощью смартфона 106 в облачную вычислительную систему 105 и/или систему 101 управления. Процессор системы 101 управления сравнивает фотографию или видео с сохраненными выборочными изображениями для идентификации признаков износа ленты 102. В некоторых вариантах процессор оценивает оставшийся срок службы ленты на основании идентифицированных признаков износа и передает отображения оценок с использованием компьютера 107, обсуждавшегося выше, и/или путем передачи оценки на смартфон 106. Альтернативно или дополнительно, система 101 управления сравнивает признаки износа с сохраненным максимальным значением и предупреждает одного или нескольких пользователей, если лента 102 превышает пороговую величину износа. Также можно использовать снимки или видео для идентификации сползания материала на обратной стороне ленты. Сползающим материалом является материал, который застревает на ленте 102 и, таким образом, перемещается лентой 102 по обратной стороне конвейерной ленты в начало верхнего отрезка 201 (см. фиг. 1С).
[00151] В некоторых вариантах снимки и/или видео конвейерной ленты сохраняются в запоминающем устройстве и/или передаются, например, с помощью электронной почты или мультимедийного сообщения удаленному контролеру таким образом, чтобы удаленный контролер мог определить состояние ленты без физического прихода в местоположение ленты. В некоторых вариантах удаленный контролер присваивает ленте количественный балл на основании состояния и/или величины сползания материала. Снимок и/или видео ленты сохраняют в базе данных наряду с соответствующим баллом. Будущие снимки и/или видео конвейерных лент сравнивают со снимками и/или видео, сохраненными в базе данных центральной системой 101 управления для аппроксимации балла. Со временем база данных увеличивается и, таким образом, аппроксимации становятся более точными, поскольку имеется больше образцов для сравнения.
[00152] На фиг. 23 представлена система 2300 для мониторинга состояния компонента 2340 конвейера, которая во многих отношениях похожа на системы 10, 400, обсуждавшиеся выше. Компонент 2340 конвейера представляет собой одно из вспомогательных устройств, описанных выше, таких как устройство очистки ленты, опорный ролик, устройство слежения за лентой или амортизирующая платформа. Датчик 2308 выполнен с возможностью определения одной или нескольких характеристик компонента 2340 конвейера. В одном варианте датчик 2308 содержит акселерометр, установленный на компонент 2340 конвейера или около него для того, чтобы обнаруживать вибрацию и/или его движение. Например, датчик 2308 может содержать акселерометр, прикрепленный к опорной штанге устройства очистки ленты, причем датчик 2308 выполнен с возможностью определения ударов одного или нескольких скребковых лезвий устройства очистки ленты и дефектов, неровностей или нарушений на поверхности конвейерной ленты, таких как стык конвейерной ленты.
[00153] Датчик 2308 может содержать микрофон, выполненный с возможностью определения звука, производимого вспомогательным устройством. Изменения звука, производимого вспомогательным устройством, могут указывать на изменение одной или нескольких характеристик вспомогательного устройства. Например, микрофон может обнаруживать треск скребкового лезвия или звук неисправного подшипника в опорном ролике. В качестве другого примера, микрофон может обнаруживать изменение звука материала, движущегося по желобу, которое происходит по мере того, как желоб заполняется перемещаемым продуктом.
[00154] Датчик 2308 выдает данные, представляющие измеренные характеристики, в схему контроллера или процессора 2302. В одном варианте осуществления датчик 2308 и схема 2302 процессора являются компонентами сенсорного модуля, такими как компоненты, обсуждавшиеся выше. В другом варианте осуществления датчик 2308 связан с компонентом 2340 конвейера, а схема 2302 процессора находится в отдельном устройстве, связанном с датчиком 2308.
[00155] Схема 2302 процессора содержит запоминающее устройство 2304 и процессор 2322. Запоминающее устройство 2304 может сохранять данные от датчика 2308, представляющие одну или несколько характеристик компонента 2340 конвейера. Процессор 2322 выполнен с возможностью выполнения операций с данными от датчика 2308. Операции включают в себя этап 2320 обработки данных для определения одной или нескольких характеристик компонента 2340 конвейера и этап 2321 сравнения одной или нескольких характеристик с одним или несколькими пороговыми значениями. В некоторых вариантах пороговые значения загружают в схему 2302 процессора и сохраняют в запоминающем устройстве 2304, например, во время изготовления, настройки или установки. В альтернативных вариантах пороговые значения рассчитывают с помощью схемы 2302 процессора на основании измеренных параметров и/или исторических данных датчиков.
[00156] Этап 2321 сравнения одной или нескольких характеристик с одним или несколькими пороговыми значениями может предусматривать определение, выше ли характеристика порогового значения, ниже ли порогового значения или за пределами диапазона между верхним и нижним пороговыми значениями. Если одна или несколько характеристик превышают пороговое значение, схема 2302 процессора использует схему 2311 связи, такую как радио приемопередатчик 2310 и/или Bluetooth приемопередатчик 2312, для подачи сигнала в удаленное вычислительное устройство, такое как облачная вычислительная система 105. Радио приемопередатчик 2310 использует радиосвязь для обмена данными через интернет с облачной вычислительной системой 105. Радио приемопередатчик 2310 может связываться с интернетом с использованием Wi-Fi или сотовой связи, как описано выше. Bluetooth приемопередатчик 2312 представляет собой беспроводной передатчик или приемопередатчик ближнего действия, такой как Bluetooth® или BLE приемопередатчик. Bluetooth приемопередатчик 2312 обменивается данными с соседними беспроводными устройствами, такими как мобильное устройство 106.
[00157] В некоторых вариантах данные, выводимые схемой 2311 связи, зашифрованы или защищены. В одном варианте система 2300 использует передачу данных с высокой степенью защиты, такую как Transport Layer Security 1.2 (TLS1.2).
[00158] В облачной вычислительной системе 105 хранятся исторические данные от датчика 2308. Облачная вычислительная система 105 обрабатывает 2322 данные для идентификации тенденций. Тенденции используют для прогнозирования таких свойств, как оставшийся срок эксплуатации компонента 2340 конвейера. Пользователь может получить доступ к информации, хранящейся в облачной вычислительной системе 105, через пользовательский интерфейс компьютера 107. В одном варианте осуществления компьютер 107 предоставляет данные из облачной вычислительной системы 105 пользователю посредством сайта в интернете, отображаемые на одном или нескольких экранах компьютера 107. В другом варианте осуществления компьютер 107 получает сообщения из облачной вычислительной системы 105, например, посредством почтовой программы. В дополнительных примерах компьютер 107 содержит программное обеспечение, которое облегчает связь с информацией, хранящейся в облачной вычислительной системе 105. Используя компьютер 107 пользователь может видеть как исходные данные от датчика 2308, так и данные, рассчитываемые из исходных данных. Рассчитываемыми данными может быть, например, прогнозируемый оставшийся срок эксплуатации компонента 2340 и/или случаи показателей, превышающих пороговое значение. В некоторых вариантах компьютер 107 получает входные данные от пользователя для заказа деталей для компонента 2340 конвейера и/или для планирования технического обслуживания компонента 2340 конвейера.
[00159] В облачной вычислительной системе 105 хранятся данные от сенсорных модулей 2308 для множества компонентов 2340 конвейера. Например, данные датчиков от множества компонентов 2340, связанные с одной и той же конвейерной лентой, можно использовать для идентификации, какой компонент 2340 нужно регулировать. Например, если облачная вычислительная система 105 знает скорость ленты и расстояние между устройствами очистки ленты назад и вперед по технологическому маршруту с сенсорными модулями 2308, облачная вычислительная система 105 может определить период времени до ожидаемого столкновения стыка с находящимся дальше по технологическому маршруту устройством очистки ленты после столкновения стыка с находящимся раньше по технологическому маршруту устройством очистки ленты. Если столкновение стыка с находящимся дальше по технологическому маршруту устройством очистки ленты существенно сильнее, чем столкновение стыка с находящимся раньше по технологическому маршруту устройством очистки ленты, находящееся дальше по технологическому маршруту устройство очистки ленты может быть слишком натянуто и облачная вычислительная система 105 может направить рабочего по техническому обслуживанию отрегулировать находящееся дальше по технологическому маршруту устройство очистки ленты.
[00160] Кроме того, данные от сенсорных модулей 2308 компонентов конвейера можно обрабатывать 2322 вместе для идентификации больших тенденций. Например, данные датчиков от множества компонентов 2340, связанные с одной и той же конвейерной лентой, можно использовать для идентификации неисправностей на конвейерной ленте, таких как дефектный стык, разрыв или грязная лента. Кроме того, данные из множества компонентов 2340 также используют для создания прогнозируемой скорости износа компонентов 2340 и предоставления более точных прогнозов оставшегося срока эксплуатации.
[00161] Мобильное устройство 106 служит в качестве пользовательского интерфейса, посредством которого пользователь 2331 может получать доступ к данным от схемы 2302 процессора. Данные содержат информацию 2324 о состоянии, относящуюся к компоненту 2340 конвейера. В некоторых вариантах данные дополнительно содержат рекомендуемые действия 2323. Например, если при обработке 2320 исходных данных от датчика 2308, процессорное устройство 2302 определяет, что компонент 2340 конвейера нуждается в техническом обслуживании, информация 2323 о рекомендуемом действии включает в себя предлагаемое действие технического обслуживания, которое должен выполнить пользователь 2331. В одном иллюстративном примере процессорное устройство 2302 обрабатывает данные акселерометра от датчика 2308 для определения, находится ли натяжение компонента 2340 конвейера (например, устройства очистки ленты) между сохраненными пороговыми значениями. Если нет, схема 2302 процессора, подает в мобильное устройство 106 предложение для пользователя затянуть или ослабить устройство 2340 очистки ленты, чтобы отрегулировать натяжение и получить натяжение устройства очистки ленты между установленными пороговыми значениями.
[00162] В некоторых вариантах компонент 2340 конвейера содержит устройство 2330 автоматического регулирования. В примерах, в которых компонент 2340 конвейера представляет собой устройство очистки ленты, устройством 2330 автоматического регулирования является исполнительный механизм для регулирования скребковых лезвий относительно ленты. Когда процессор 2322 обнаруживает, что натяжение устройства очистки ленты не находится в пределах нужного диапазона, как описано выше, процессорное устройство 2302 может задействовать устройство 2330 автоматического регулирования для регулировки натяжения устройства очистки ленты. Компонент 2340 конвейера может содержать другие вспомогательные устройства, такие как амортизирующая платформа, устройство слежения за лентой и подающий желоб.
[00163] Работа одного компонента 2340 конвейера может влиять на другие компоненты 2340 конвейера. Например, если компонент 2340 конвейера представляет собой устройство очистки ленты, процессорное устройство 2302 может определить, что соответствующая конвейерная лента повреждена на основании данных от датчика 2308 компонента 2330 конвейера. Затем процессорное устройство 2302 может задействовать устройство 2330 автоматического регулирования других устройств очистки ленты на ленте, обеспечивая отведение устройствами очистки ленты скребковых лезвий устройств очистки ленты от поврежденной ленты. В другом варианте осуществления облачная вычислительная система 105 посылает сигналы управления в устройство 2330 автоматического регулирования и может управлять работой устройства 2330 автоматического регулирования на одном компоненте 2340 конвейера и других компонентах 2340 конвейера в ответ на регулировку одного компонента 2340 конвейера.
[00164] В качестве другого примера, если компонент 2340 конвейера представляет собой устройство очистки ленты, процессорное устройство 2302 может определить, что соответствующая конвейерная лента повреждена на основании данных от датчика 2308 компонента 2340 конвейера. Процессорное устройство 2302 может задействовать устройства 2330 автоматического регулирования других компонентов 2340 конвейера для остановки перемещения материала. Например, процессорное устройство 2302 может закрыть подающий желоб, который подает материал на ленту и/или остановить работу одной или нескольких конвейерных лент, таких как лента, очищаемая компонентом 2340 конвейера, находящаяся позади по технологическому маршруту конвейерная лента и/или находящаяся впереди по технологическому маршруту конвейерная лента.
[00165] На фиг. 24А-24В представлен сенсорный модуль 2405, выполненный с возможностью определения одной или нескольких рабочих характеристик вспомогательного устройства конвейерной системы. Сенсорный модуль 2405 во многих отношениях похож на сенсорный модуль 1305, обсуждавшийся выше. Сенсорный модуль 2405 имеет корпус 2404, выполненный с возможностью соединения с конвейерной системой с возможностью снятия. Корпус 2404 имеет сквозное отверстие 2407 для приема части вспомогательного устройства. В одном варианте осуществления отверстие 2407 круглое для соединения с цилиндрическим опорным элементом, таким как опорная штанга 1306, обсуждавшаяся выше.
[00166] Корпус 2404 содержит сенсорный контур, аналогичный сенсорным контурам, описанным выше. Сенсорный контур закрыт лицевой панелью 2406. Лицевая панель 2406 соединена с сенсорным модулем 2405 множеством винтов 2409. Лицевая панель 2408 содержит пользовательский интерфейс 2401, соединенный с возможностью обмена данными с сенсорным контуром. Пользовательский интерфейс 2401 имеет множество пользовательских средств ввода, таких как кнопки 2410, 2412, 2414 (см. фиг. 24В) и множество средств вывода, таких как индикаторы 2420, 2421, 2422, 2423, 2424, 2425, 2426 состояния.
[00167] Во время работы сенсорный модуль 2405 соединяют с возможностью обмена данными с мобильным устройством, таким как смартфон или планшетный компьютер, во время настройки с использованием протокола беспроводной связи ближнего действия. Кнопка 2410 сопряжения переводит сенсорный модуль 2405 в режим сопряжения таким образом, чтобы можно было установить беспроводное соединение. В одном варианте используемым протоколом беспроводной связи ближнего действия является Bluetooth® или BLE. Кнопка 2410 сопряжения обеспечивает подачу сенсорным модулем 2405 сигнала сопряжения, который может быть обнаружен мобильным устройством для сопряжения устройств.
[00168] Индикатор 2420 сопряжения выводит информацию пользователю во время процесса сопряжения. Например, удерживание кнопки 2410 сопряжения вызывает временный ввод сенсорным модулем 2405 состояния сопряжения, в котором передаются сигнал сопряжения. Находясь в состоянии сопряжения индикатор 2420 сопряжения мигает, указывая пользователю, что сенсорный модуль 2405 выводит сигнал сопряжения. Дополнительно или альтернативно, индикатор 2420 сопряжения показывает, образовано ли беспроводное соединение. Например, индикатор 2420 сопряжения может быть освещен, когда сенсорный модуль 2405 сопряжен беспроводным образом по меньшей мере с одним мобильным устройством.
[00169] Индикатор 2421 соединения показывает, надежно ли соединение между сенсорным модулем 2405 и мобильным устройством. Например, после сопряжения мобильного устройства с сенсорным модулем 2405 пользователь должен войти в систему на своем мобильном устройстве. Индикатор 2421 соединения светится или мигает при подтверждении входа в систему и начале передачи данных между сенсорным модулем 2405 и мобильным устройством.
[00170] Сенсорный модуль 2405 связывается с интернетом с использованием связи WiFi или по сотовой сети и содержит индикатор 2423 WiFi и сотовый индикатор 2425. Индикатор 2423 WiFi показывает состояние соединения с интернетом по WiFi. В одном варианте индикатор 2423 WiFi имеет первый цвет, например, зеленый, когда установлено соединение WiFi с локальной беспроводной сетью и интернетом. Индикатор 2423 WiFi имеет второй цвет, например, красный, при отсутствии соединения WiFi. В некоторых вариантах индикатор 2423 WiFi имеет третий цвет, например, желтый, при соединении с локальной беспроводной сетью (например, беспроводным роутером или беспроводным модемом), но не с интернетом. В другом варианте осуществления вместо разных цветов используют разные типы освещения. Например, индикатор WiFi не освещен при отсутствии соединения WiFi, освещен, когда соединение с интернетом существует, и мигает при соединении с роутером или модемом, но не с интернетом.
[00171] Сотовый индикатор 2425 показывает состояние соединения по сотовой сети, такого как соединение LTE CAT-MI, NB-IoT или GSM, как описано выше. Сотовый индикатор 2425 действует по существу так же, как индикатор 2423 WiFi. Первое состояние, например, первый цвет или непрерывная подсветка, показывает, что сенсорный модуль 2405 соединен с сотовой сетью и интернетом. Второе состояние, например, второй цвет или отсутствие освещения, показывает отсутствие соединения по сотовой сети. Третье состояние, например, третий цвет или прерывистая подсветка, показывает соединение со шлюзом сотовой сети, таким как вышка сотовой связи, но не соединение с интернетом.
[00172] Корпус 2404 содержит один или несколько аккумуляторов, аналогичных аккумуляторам, описанным в сенсорных модулях выше. Корпус 2404 содержит съемную аккумуляторную пластину 2408, которая закрывает отделение для аккумуляторов. Удаление аккумуляторной пластины 2408 предоставляет доступ к отделению источников энергии корпуса 2404, позволяя удалять и заменять аккумулятор или аккумуляторы. Аккумулятор или аккумуляторы могут представлять собой, например, одноразовую батарейку, такую как батарейка, имеющая элементы литий-тионилхлорид, заряжаемый аккумулятор. Аккумулятор или аккумуляторы могут запасать энергию, получаемую от солнечных элементов.
[00173] Что касается фиг. 24А, индикатор 2424 аккумулятора показывает заряд аккумулятора. Индикатор 2424 аккумулятора содержит индикаторы, показывающие приблизительный процент оставшегося заряда аккумулятора. Например, подсветка всех четырех индикаторов показывает приблизительно 100% заряд, подсветка трех индикаторов показывает приблизительно 75% заряд, подсветка двух индикаторов показывает приблизительно 50% заряд, а подсветка одного индикатора показывает приблизительно 25% заряд. В некоторых вариантах по меньшей мере один из световых индикаторов 2424 аккумулятора выполнен с возможностью подсветки по меньшей мере двумя цветами. Подсветка одного индикатора вторым цветом показывает критически низкий заряд аккумулятора, например, менее 10%. В альтернативных вариантах осуществления вместо разных цветов используют иное состояние освещения, например, один мигающий свет, чтобы обозначить оставшийся заряд менее 10%.
[00174] Альтернативно или дополнительно к аккумулятору, сенсорный модуль 2405 содержит проводное соединение с источником энергии. Индикатор 2426 проводного источника энергии показывает соединение с источником энергии, таким как электрическая сеть. Индикатор 2626 источника энергии освещен при соединении с источником энергии и выключен при отсутствии соединения. В некоторых вариантах проводной источник энергии, такой как зарядный кабель, можно отсоединять для заряда аккумулятора или аккумуляторов. Некоторые зарядные устройства содержат один или несколько дополнительных аккумуляторов. Например, в одном варианте сенсорный модуль 2405 содержит порт для образования проводного соединения с мобильным устройством, используемым во время настройки. Портом может быть USB порт, с помощью которого сенсорный модуль 2405 и мобильное устройство можно соединить посредством провода USB. С помощью этого соединения мобильное устройство передает данные и заряжает аккумулятор или аккумуляторы сенсорного модуля 2405.
[00175] Сенсорный модуль 2405 дополнительно содержит дополнительные индикаторы 2422 состояния. Индикаторы 2422 состояния представляют собой индикаторы, используемые для указания другой информации о состоянии. В некоторых вариантах индикаторы 2422 состояния представляют собой многоцветные LED, такие как красный, желтый и зеленый LED. Иллюстративная информация о состоянии включает в себя неисправности сенсорного модуля 2405, такие как замерзший процессор или поврежденный датчик.
[00176] Для продления срока годности аккумулятора сенсорный модуль 2405 содержит средство 2412 ввода состояния. Нажатие средства ввода состояния обеспечивает подсветку средств 2420, 2421, 2422, 2423, 2424, 2425, 2426 вывода, указывающую на состояния, которые описаны выше. После высвобождения средства 2412 ввода состояния индикаторы 2420, 2421, 2422, 2423, 2424, 2425, 2426 выключаются для экономии энергии. В некоторых вариантах перед выключением индикаторов происходит задержка по времени после высвобождения средства 2412 ввода состояния.
[00177] Что касается фиг. 24В, на задней стороне сенсорного модуля 2405 находится кнопка 2414 питания для включения и выключения сенсорного модуля 2405. За счет наличия кнопки 2414 питания на задней стороне сенсорного модуля 2405 менее вероятно, что рабочий по техническому обслуживанию случайно нажмет кнопку 2414 питания, полагая, что кнопка 2414 питания является кнопкой 2410 сопряжения или кнопкой 2412 индикатора состояния.
[00178] На фиг. 25 представлен способ 2500 установки конвейерной системы, имеющей сенсорные модули, такие как сенсорные модули, описанные в данном документе. Пользователь, такой как установщик или рабочий по техническому обслуживанию, устанавливает сенсорные модули 2522 конвейерной системы с использованием мобильного устройства 106.
[00179] На первоначальном этапе в систему, такую как облачная вычислительная система 105, создают и загружают 2501 онтологию сайта. Онтология иллюстрирует общую компоновку конвейерной системы, включая местоположение и идентификацию вспомогательных устройств. Идентификация каждого вспомогательного устройства может включать в себя марку и/или модель вспомогательного устройства, а также идентификацию одного или нескольких компонентов вспомогательного устройства. Например, идентификация устройства очистки ленты может включать в себя марку и модель устройства очистки ленты, а также марку и модель скребкового лезвия устройства очистки ленты. Пользователь авторизуется 2502 для просмотра онтологии для помощи в установке и настройке вспомогательных устройств и сенсорных модулей.
[00180] Во время настройки пользователь может устанавливать 2503 на устройство 120 очистки ленты новое лезвие и правильно натягивать устройство 120 очистки ленты. Один из сенсорных модулей 2522 устанавливают 2504 на устройство 120 очистки ленты в такое положение, чтобы сенсорный модуль 2522 контролировал одну или несколько рабочих характеристик устройства 120 очистки ленты.
[00181] Затем установленный сенсорный модуль 2522 включают 2505. Для проверки состояния сенсорного модуля 2522 пользователь осматривает индикаторы, такие как индикаторы 2420, 2421, 2422, 2423, 2424, 2425, 2426, описанные выше. Между сенсорным модулем 2522 и мобильным устройством 106 устанавливают 2506 беспроводное соединение ближнего действия. Как описано выше, иллюстративное беспроводное соединение ближнего действия включает в себя соединение Bluetooth® или BLE. Пользователь предоставляет в пользовательский интерфейс мобильного устройства 106 информацию для входа в систему, которая передается в сенсорный модуль 2522. Информация для входа в систему может содержать информацию, необходимую, чтобы позволить пользователю установить сенсорный модуль 2522, а также информацию, необходимую для доступа к беспроводной сети. Сенсорный модуль 2522 использует информацию для создания 2507 соединения с интернетом. Соединение с интернетом с возможностью обмена данными связывает сенсорный модуль 2522 с облачной вычислительной системой 105. Пользователь вводит проверочную или удостоверяющую информацию, такую как пароль и/или ID для образования надежного соединения между сенсорным модулем 2522 и облачной вычислительной системой 105.
[00182] Информацию загружают в облачную вычислительную систему 105 для связывания 2508 сенсорного модуля 2522 с конкретной конвейерной системой и с конкретным местоположением внутри конвейерной системы. В некоторых вариантах связывание 2508 предусматривает редактирование 2509 онтологии. Каждый сенсорный модуль 2522 имеет уникальный идентификатор, такой как ID номер, обеспечивающий идентификацию с целью связывания 2508. В некоторых вариантах идентификатор напечатан на корпусе сенсорного модуля 2522, например, в виде сканируемого кода. Альтернативно или дополнительно, идентификатор сохранен в запоминающем устройстве сенсорного модуля 2522 и доступен для мобильного устройства 106 после установки 2506 соединения.
[00183] После образования соединения с облачной вычислительной системой 105 сенсорный модуль 2522 начинает регистрировать 2510 данные, как описано в способах выше. Зарегистрированные данные передаются в облачную вычислительную систему 105 посредством соединения с интернетом. В облачной вычислительной системе 105 данные хранятся и обрабатываются.
[00184] Пользователь повторяет этапы 2503-2509 для каждого сенсорного модуля 2522 конвейерной системы таким образом, чтобы сопоставить каждый сенсорный модуль 2522 с конкретным местоположением в онтологии и соединить с возможностью обмена данными с облачной вычислительной системой 105.
[00185] Во время технического обслуживания сенсорные модули 2522 можно привязать к местоположениям онтологии конвейерной системы с помощью следующих этапов, аналогичных этапам, описанным выше. Пользователь извлекает один или несколько сенсорных модулей 2522 из одного или нескольких компонентов конвейера для обслуживания сенсорных модулей 2522, например, для замены или зарядки аккумуляторов. Когда пользователь переустанавливает сенсорные модули 2522 на компонентах конвейера, между мобильным устройством 106 и одним из сенсорных модулей 2522 устанавливается 2506 коммуникационный канал. В одном варианте осуществления связывание предусматривает процедуру сопряжения между мобильным устройством 106 и сенсорным модулем 2522 по Bluetooth.
[00186] Когда связанный сенсорный модуль 2522 установлен на компонент конвейера, пользователь указывает местоположение сенсорного модуля 2522 в онтологии конвейерной системы с использованием мобильного устройства 106. В одном варианте осуществления, чтобы указать местоположение сенсорного модуля 2522 в онтологии конвейерной системы, пользователь использует сенсорный экран мобильного устройства 106. Мобильное устройство 106 передает информацию, относящуюся к местоположению по меньшей мере в одно из облачной вычислительной системы 105 и мобильного устройства 106.
[00187] Пользователь повторяет процедуру установки и связывания для каждого сенсорного модуля 2522 по мере переустановки сенсорных модулей 2522. При указании местоположения каждого сенсорного модуля 2522, при установке сенсорного модуля 2522, пользователю не нужно следить за тем, чтобы каждый сенсорный модуль 2522 был установлен в то же самое местоположение, что и перед удалением. Это позволяет рабочему по техническому обслуживанию быстро заменять или заряжать аккумуляторы для ряда сенсорных модулей 2522 в ограниченных условиях, таких как шахты.
[00188] Как показано на фиг. 26, представлен сенсорный модуль 2600, аналогичный сенсорным модулям, обсуждавшимся выше, и прикрепленный к опорной штанге 2602 устройства 2604 очистки конвейерной ленты. Опорная штанга 2602 может содержать цилиндрическую боковую стенку, проходящую вокруг отверстия 2603 опорной штанги 2602. Сенсорный модуль 2600 прикреплен к опорной штанге 2602 наружу от крепления 2606 устройства 2604 очистки конвейерной ленты. Крепление 2606 имеет гильзу 2608, прикрепленную к опорной штанге 2602 с помощью одного или нескольких фиксирующих крепежных приспособлений 2610. Сенсорный модуль 2600 имеет верхнюю часть 2612 корпуса и нижнюю часть 2614 корпуса, которые образуют сквозное отверстие 2616 для приема опорной штанги 2602. Верхняя часть 2612 корпуса содержит крышку 2618, которая может быть сделана из гибкого материала, такого как эластомер, и используется, чтобы закрывать крепежные приспособления 2620 (см. фиг. 27), которые соединяют верхнюю часть 2612 корпуса и нижнюю часть 2614 корпуса с фиксированным расположением на опорной штанге 2602.
[00189] Верхняя и нижняя части 2612, 2614 корпуса имеют установочную или первоначальную конфигурацию, которая обеспечивает расположение верхней и нижней частей 2612, 2614 корпуса на опорной штанге 2602. В одном варианте осуществления в первоначальной конфигурации верхняя и нижняя части 2612, 2614 корпуса полностью отделены друг от друга. В другом варианте осуществления верхняя и нижняя части 2612, 2614 корпуса соединены шарниром и в первоначальной конфигурации разнесены. После расположения верхней и нижней частей 2612, 2614 корпуса на опорной штанге 2602 пользователь изменяет конфигурацию верхней и нижней частей 2612, 2614 корпуса на фиксирующую конфигурацию, в которой верхняя и нижняя части 2612, 2614 зажимают опорную штангу 2602 между ними. В одном варианте осуществления пользователь изменяет конфигурацию верхней и нижней частей 2612, 2614 корпуса путем вставки крепежных приспособлений 2620 через отверстия 2646 (см. фиг. 27) верхней и нижней частей 2612, 2614 корпуса, и затягивая крепежные приспособления 2620. Опорная штанга 2602 имеет определенные вибрации, вызываемые работой соответствующей конвейерной ленты, а установка сенсорного модуля 2600 на опорную штангу 2602 обеспечивает четкие вибрации для измерения сенсорным модулем 2600.
[00190] В одном подходе крышка 2618 является гибкой и содержит концевую часть 2626, имеющую отверстие 2622, которое принимает защелку 2624 верхней части 2612 корпуса. Крышка 2618 имеет концевую часть 2627, противоположную концевой части 2626, которая прикреплена к верхней части 2612 корпуса. Для доступа к крепежным приспособлениям 2620 концевой частью 2626 крышки 2618 манипулируют, чтобы отсоединить концевую часть 2626 от защелки 2624, и отодвигают ее от верхней части 2612 корпуса в направлении 2628.
[00191] Сенсорный модуль 2600 содержит пользовательский интерфейс 2630, который может содержать одну или несколько кнопок 2632. Пользователь может нажимать на одну из кнопок 2632 для запроса состояния сенсорного модуля 2600 и может нажимать на другую из кнопок 2632 для создания беспроводной связи ближнего действия между сенсорным модулем 2600 и портативным электронным устройством, таким как смартфон.
[00192] Как показано на фиг. 27, верхняя часть 2612 корпуса содержит гнезда 2640, в которые вставляют крепежные приспособления 2620, а крышка 2618 содержит вставные части 2642, имеющие размер для установки в гнезда 2640, закрывая головки 2644 крепежных приспособлений 2620, и противодействия попаданию материала в конструкции привода крепежных приспособлений 2620. Вставные части 2642 крышки 2618 также могут проходить вокруг головок 2644 и противодействовать попаданию мусора в отверстия 2646 верхней части 2612 корпуса, через которые проходят крепежные приспособления 2620. Верхняя часть 2612 корпуса и нижняя часть 2614 корпуса содержат фиксирующие части 2650, 2652, которые являются изогнутыми или имеют иную форму для совпадения с внешней поверхностью 2654 (см. фиг. 26) опорной штанги 2602.
[00193] Нижняя часть 2614 корпуса содержит отделение 2656, в которое вставляют печатную плату 2658, опору 2660 печатной платы и аккумулятор 2662. Отделение 2656 содержит одну или несколько стенок 2664 и дверцу 2666, имеющую уплотнение 2668, которое зацепляет одну или несколько стенок 2664 и герметизирует отделение 2656. Дверца 2666 содержит отверстия 2670 для приема, например, крепежных приспособлений 2673, выполненных с возможностью прикрепления дверцы 2666 к стенкам 2664 и обеспечения доступа к кнопке 2672 питания сенсорного модуля 2600. Дверца 2666 содержит защитные крышки 2678, выполненные с возможностью вставки в каждое из отверстий 2670 и закрывания ими крепежного приспособления 2672 или кнопки 2672 питания. Дверца 2666 может быть образована с использованием двухэтапного процесса, в котором корпус 2676 дверцы 2666 образован с использованием первого материала, полученного методом инжекционного формования, и уплотнения 2668, а защитные крышки 2678 образованы при второй инжекции с использованием второго инжектируемого материала. Таким образом, дверца 2666 имеет цельную конструкцию, так что дверцу 2666 можно легко снимать и соединять со стенками 2654 без возможности неправильной установки пользователем уплотнения 2668 или защитных крышек 2678. В одном варианте осуществления верхняя часть 2612 корпуса и нижняя часть 2614 корпуса, содержащая корпус 2676 дверцы, изготовлены из жесткого материала, такого как стеклонейлон. Уплотнение 2668 и крышка 2678 могут быть сделаны, например, из мягкого эластомера. Опора 2660 печатной платы может быть сделана из жесткого материала, такого как пластмасса на основе сополимера акрилонитрил/бутадиен/стирола.
[00194] Что касается фиг. 27, печатная плата 2658 содержит процессор 2680, схему 2682 связи, один или несколько датчиков 2684 и запоминающее устройство 2686. В опору 2660 печатной платы вставляют печатную плату 2658, и печатную плату 2658 прочно прикрепляют внутри нижней части 2614 корпуса. Печатная плата 2660 дополнительно содержит аккумуляторное отделение 2690 для приема аккумулятора 2662.
[00195] Один или несколько датчиков 2682 выполнены с возможностью определения одной или нескольких характеристик опорной штанги 2602. Один или несколько датчиков 2684 могут представлять собой, например, акселерометр, гироскоп или их комбинацию. Датчики 2684 могут измерять, например, ускорение в направлении Z по длине штанги 2602 (которое может быть вызвано сгибанием штанги), ускорение в направлении оси X, перпендикулярной оси Z, ускорение в направлении оси Y, перпендикулярной и оси Z и оси X, и ускорения вокруг одной или нескольких осей X, Y и Z. Опорная штанга 2602 испытывает большое ускорение, небольшие смещающие движения, вызываемые работой конвейерной ленты и обнаруживаемые одним или несколькими датчиками 2684. Опорная штанга 2602 также испытывает сильные смещающие события, такие как столкновение стыка с чистящим лезвием устройства 2604 очистки конвейерной ленты, которые также обнаруживают один или несколько датчиков 2684.
[00196] В качестве примера, одна или несколько характеристик опорной штанги 2602 могут включать в себя ориентацию опорной штанги 2602. Датчики 2684 могут обнаруживать ориентацию опорной штанги 2602 относительно силы тяжести. По мере износа чистящего лезвия опорная штанга 2602 будет поворачиваться, а датчик 2684 будет обнаруживать изменение ориентации опорной штанги 2602 относительно силы тяжести. Сенсорный модуль 2600 может передавать ориентацию опорной штанги 2602, так чтобы можно было прогнозировать одно или несколько свойств чистящего лезвия, таких как оставшийся срок службы чистящего лезвия.
[00197] Как показано на фиг. 28, сенсорный модуль 2600 может быть установлен и задействован способом, совместимым с сенсорными модулями, как обсуждалось выше. В одном варианте осуществления сенсорный модуль 2600 установлен на опорной штанге 2602, и пользователь беспроводным образом связывает портативное электронное устройство, таким как смартфон 2700, с сенсорным модулем 2600. Смартфон 2700 может передавать 2704 информацию и/или получать информацию от сенсорного модуля 2600. После соединения смартфон 2700 может действовать как пульт дистанционного управления сенсорным модулем 2600 и обеспечивать передачу 2708, 2730 сенсорным модулем 2600 информации в облачную вычислительную систему 2710, которая содержит удаленный сервер 2720, и/или от нее.
[00198] Например, смартфон 2700 может связываться с сенсорным модулем 2600 по беспроводному протоколу ближнего действия, такому как Bluetooth, используемому схемой 2682 связи. В одном подходе пользователь, например, рабочий по техническому обслуживанию нажимает кнопку 2632А сопряжения сенсорного модуля 2600 для помещения сенсорного модуля 2600 в режим сопряжения, и пользователь может выполнить сопряжение смартфона 2700 с сенсорным модулем 2600. После сопряжения смартфона 2700 и сенсорного модуля 2600 пользователь может использовать приложение, установленное на смартфоне 2700, для ввода информации, идентифицирующей устройство 2604 очистки конвейерной ленты, с которыми соединен сенсорный модуль 2600, например, используя изображенный графический пользовательский интерфейс 2702. Например, информация может содержать идентификацию конвейерной ленточной системы, связанной с устройством 2604 очистки конвейерной ленты, местоположение устройства 2604 очистки конвейерной ленты вдоль конвейерной ленты, номер модели устройства 2602 очистки конвейерной ленты и номер модели скребковых лезвий, установленных в устройстве 2602 очистки конвейерной ленты. Посредством смартфона 2700 можно предоставить дополнительную информацию, такую как оценочное натяжение, которое устройство 2604 очистки конвейерной ленты применяет к чистящим лезвиям, материал, перемещаемый конвейерной лентой, материал конвейерной ленты и/или другая информация.
[00199] Смартфон 2700 передает 2704 информацию в сенсорный модуль 2600, а сенсорный модуль 2600 передает 2708 информацию на удаленный сервер 2720, например, посредством сотовой сети 2712 и интернета 2718. Передача 2708 включает в себя глобальный уникальный идентификатор для сенсорного модуля 2600, так чтобы удаленный сервер 2720 мог сопоставить полученную информацию с сенсорным модулем 2600, который передал информация.
[00200] Из-за того, что сенсорный модуль 2600 выступает в качестве посредника между смартфоном 2700 и сотовой сетью 2712, смартфону 2700 не нужно связываться с сотовой сетью 2712, что может быть трудно в удаленных местоположениях. В одном варианте осуществления сенсорный модуль 2600 обменивается данными с сотовой сетью 2712 с использованием стандарта 4G LTE CAT М, который может обеспечивать более хорошую связь в удаленных зонах, чем обычные сотовые сети 3G или 4G. В другом варианте осуществления сенсорный модуль 2600 обменивается данными с удаленным сервером 2720 посредством локального беспроводного шлюза и интернета. Из-за того, что сенсорный модуль 2600 выступает в качестве посредника между смартфоном 2700 и локальным беспроводным шлюзом, смартфону 2700 не нужно связываться с локальным беспроводным шлюзом. Это может улучшать надежность беспроводной сети на объекте из-за того, что рабочему по техническому обслуживанию для настройки или обслуживания сенсорного модуля 2600 не нужно связываться с локальным беспроводным шлюзом.
[00201] Облачная вычислительная система 2710 во многих отношениях похожа на облачные вычислительные системы, обсуждавшиеся выше, и содержит удаленный сервер 2720. Удаленный сервер 2720 содержит процессор 2722, интерфейс 2724 связи и запоминающее устройство 2726. Запоминающее устройство 2726 содержит историческую базу 2728 данных, которая содержит историческую информацию, которую использует процессор 2722 во время работы конвейерной ленты для оценки одной или нескольких характеристик чистящего лезвия устройства 2604 очистки конвейерной ленты, которое обсуждалось выше. База 2728 исторических данных может содержать исторические данные, представляющие одну или несколько характеристик опорной штанги 2602, когда опорная штанга 2602 вибрирует при работе соответствующей конвейерной ленты.
[00202] Процессор 2722 удаленного сервера 2720 прогнозирует по меньшей мере одно свойство устройства 2604 очистки конвейерной ленты путем сравнения по меньшей мере одной характеристики опорной штанги 2602 по меньшей мере с одной характеристикой, сохраненной в базе 2728 данных. В одном варианте осуществления процессор 2722 контролирует изменения характеристик вибрации, обнаруженных датчиками 2684, для идентификации изменений по меньшей мере одного свойства чистящего лезвия. Сигнал от данного датчика 2684, контролирующего вибрацию опорной штанги 2602, содержит ряд разных частот, и для идентификации, что в сигнале имеются частоты, можно выполнить быстрое преобразование Фурье. Могут быть конкретные частоты, которые более заметны в данных, чем другие частоты. Эти заметные или основные частоты с течением времени могут изменяться, по мере работы конвейерной ленты. Например, процессор 2722 может смотреть, изменяются ли обнаруженные основные частоты на некоторое количество Гц от исходных частот, наблюдаемых при первоначальной установке сенсорного модуля 2600 на опорную штангу 2602. Процессор 2722 может определить произошедшее изменение по меньшей мере одного свойства чистящего лезвия, если изменение основных частот больше, чем заданное пороговое значение. Процессор 2722 может обеспечить отправку интерфейсом 2724 связи предупреждения на смартфон 2700 рабочего по техническому обслуживанию.
[00203] Например, как показано на фиг. 34, представлен график 3000 ответа частотной области сигналов от акселерометра, прикрепленного к опорной штанге устройства очистки конвейерной ленты, которые были получены во время тестирования. График 3000 иллюстрирует, как изменяются основные частоты ответа частотной области с изменениями во время работы соответствующей конвейерной ленточной системы. Например, когда конвейерную ленту загрузили материалом, а натяжение устройства очистки конвейерной ленты составляло ноль или 100% допустимого натяжения, измеренная основная частота соответствует частоте 3002. Когда на конвейерной ленте материал отсутствует, а натяжение устройства очистки конвейерной ленты составляло 0%, основная частота соответствует частоте 3004. Когда на конвейерной ленте материал отсутствует, а натяжение устройства очистки конвейерной ленты составляло 100%, основная частота соответствует частоте 3006. При сохранении этих исторических данных в базе 2728 данных процессор 2722 будет способен спрогнозировать, что на ленте нет материала, а чистящие лезвия устройства очистки конвейерной ленты испытывают нулевое процентное натяжение, если основная частота, измеренная во время работы конвейерной ленты, соответствует частоте, аналогичной частоте 3004. Таким образом, процессор 2722 может прогнозировать одно или несколько текущих свойств конвейерной ленты и/или лезвий устройства очистки конвейерной ленты на основании исторических данные одной или нескольких характеристик опорной штанги.
[00204] В качестве другого примера, процессор 2722 может прогнозировать вибрацию чистящего лезвия устройства 2604 очистки конвейерной ленты путем идентификации отклонения частоты и/или амплитуды одной или нескольких основных частот ускорения опорной штанги 2602 от исторической частоты и/или амплитуды. Альтернативно или дополнительно, исторических база 2728 данных может содержать исторические данные, представляющие одну или несколько характеристик опорных штанг других устройств очистки конвейерной ленты, связанных с той же конвейерной лентой или с другими конвейерными лентами. Процессор 2722 может использовать исторические данные других устройств очистки конвейерной ленты для выработки одного или нескольких пороговых значений для отклонения, которое должно совпасть, перед тем, как отклонение частоты и/или амплитуды основных частот по меньшей мере одной характеристики опорной штанги 2602 инициирует отправку предупреждения команде технического обслуживания.
[00205] Процессор 2722 может использовать данные из других источников для прогнозирования по меньшей мере одного свойства чистящего лезвия устройства 2604 очистки конвейерной ленты. Например, интерфейс 2724 связи может получать данные положения от линейного исполнительного механизма устройства 2604 очистки конвейерной ленты. Процессор 2722 может использовать данные положения и посылаемую по меньшей мере одну характеристику опорной штанги 2602 для прогнозирования, сцеплено ли чистящее лезвие с конвейерной лентой.
[00206] База 2728 данных также содержит множество алгоритмов, которые используют для моделирования физического поведения устройства 2604 очистки конвейерной ленты. Один или несколько алгоритмов могут использоваться сенсорным модулем 2600, удаленным сервером 2720 или и тем и другим. Например, на основании информации, полученной посредством передачи 2708 из сенсорного модуля 2600, удаленный сервер 2720 может отправлять сообщение 2730 в сенсорный модуль 2600, которое содержит по меньшей мере часть алгоритма, например, весь алгоритм или переменные алгоритма, который соответствует типу устройства 2604 очистки конвейерной ленты, на котором установлен сенсорный модуль 2600. Например, процессор 2722 удаленного сервера 2720 может выбрать по меньшей мере часть алгоритма на основании, например, марки устройства 2604 очистки конвейерной ленты, модели устройства 2604 очистки конвейерной ленты, размера устройства 2604 очистки конвейерной ленты, модели чистящих лезвий, типа материала, перемещаемого соответствующим конвейером, и/или другой информации. Процессор 2722 использует по меньшей мере часть алгоритма для выполнения первоначальной обработки данных, полученных от одного или нескольких датчиков 2684. Таким образом, сенсорный модуль 2600 может обеспечить пограничную обработку для системы.
[00207] Используя по меньшей мере часть полученного алгоритма, сенсорный модуль 2600 может рассчитать одну или несколько характеристик опорной штанги 2602, когда опорная штанга 2602 вибрирует во время работы соответствующей конвейерной ленты. По меньшей мере одна характеристика может включать в себя, например, поступательное ускорение, вращательное ускорение, положение, скорость, направление силы тяжести или их комбинацию. Сенсорный модуль 2600 может передавать по меньшей мере одну характеристику опорной штанги 2602 на удаленный сервер 2720. Процессор 2720 использует по меньшей мере одну характеристику опорной штанги 2602 для прогнозирования по меньшей мере одного свойства чистящего лезвия устройства 2604 очистки конвейерной ленты. По меньшей мере одно свойство может включать в себя, например, сцеплено ли чистящее лезвие с лентой, натяжение, прикладываемое к чистящему лезвию, остаточную высоту лезвия, вибрирует ли чистящее лезвие, и/или поврежден ли амортизатор чистящего лезвия конвейерной ленты. Удаленный сервер 2720 также может использовать по меньшей мере одну характеристику опорной штанги 2602 для прогнозирования по меньшей мере одного свойства конвейерной ленты, связанного с устройством 2604 очистки конвейерной ленты. По меньшей мере одно свойство конвейерной ленты может включать в себя, присутствует ли материал на конвейерной ленте, движется ли конвейерная лента, скорость конвейерной ленты, нарушена ли ориентация конвейерной ленты или их комбинацию.
[00208] Как показано на фиг. 29, может быть несколько устройств очистки конвейерной ленты, причем их опорная штанга не выходит за пределы крепления устройства очистки конвейерной ленты. В эти ситуациях, можно использовать расширитель 2800 штанги для создания дополнительного пространства за пределами пути перемещения материала по конвейерной ленте для установки сенсорного модуля 2600. Расширитель 2800 штанги содержит корпус 2802, имеющий кольцевую стенку 2804 с внешней поверхностью 2806, которая может иметь размер и форму, аналогичную или иную, чем у опорной штанги, с которой соединен расширитель 2800 штанги. Внешняя поверхность 2806 может походить на цилиндр, прямоугольную призму или другие формы, а соответствующий сенсорный модуль 2600 выполнен с возможностью закрепления на внешней поверхности 2806.
[00209] Что касается фиг. 29 и 32, расширитель 2800 штанги содержит установочную часть 2810, имеющую установочную или первоначальную конфигурацию, причем установочная часть 2810 имеет размер для вставки в отверстие 2812 опорной штанги 2811. Она связывает расширитель 2800 штанги с опорной штангой 2811, несмотря на то, что опорная штанга 2811 имеет крепление 2813 на конце опорной штанги 2811. Установочная часть 2810 дополнительно содержит расширенную конфигурацию (см. фиг. 33), в которой установочная часть 2810 зацепляет внутреннюю поверхность 2814 опорной штанги 2811 и прочно прикрепляет расширитель 2800 штанги к опорной штанге 2811.
[00210] Возвращаясь к фиг. 29, установочная часть 2810 содержит один или несколько отклоняемых элементов 2820, таких как дуговые стенки 2822, разделенные зазорами 2824. Каждая дуговая стенка 2822 содержит часть 2826 основания и свободную концевую часть 2828. Установочная часть 2810 содержит распорное приспособление 2830, имеющее трубчатый корпус 2832 и стенки 2834, проходящие радиально наружу от трубчатого корпуса 2832. Стенки 2834 включают в себя одну или несколько кулачковых стенок 2836 и одну или несколько противовращательных стенок 2838. Кулачковые стенки 2836 выполнены с возможностью зацепления внутренних поверхностей 2840 стенок 2822 и разжимают стенки 2822. Противовращательные стенки 2838 имеют размер для установки в зазоры 2824 для противодействия повороту распорного приспособления 2830, когда распорное приспособление 2830 толкает дуговые стенки 2822 к внутренней поверхности 2814 опорной штанги 2811.
[00211] Как показано на фиг. 30, расширитель 2800 штанги содержит исполнительный механизм 2849, такой как болт 2850, имеющий головку 2852 и хвостовик 2854, отходящий от головки 2852. Расширитель 2800 штанги содержит основание, такое как поперечный штифт 2854, который проходит через сквозное отверстие 2856 в кольцевой части 2804 стенки. Поперечный штифт 2854 содержит сквозное отверстие 2856, через которое проходит хвостовик 2854, и углубленную часть 2858, которая принимает головку 2852 и обеспечивает поворот головки 2852. хвостовик 2854 содержит резьбовую часть 2860 в зацеплении с резьбой 2862 сквозного отверстия 2864 распорного приспособления 2866. Таким образом, поворот головки 2852 в направлении по часовой стрелке вызывает сдвиг распорного приспособления 2866 в направлении 2870 к кольцевой стенке 2804. Когда распорное приспособление 2866 сдвигается в направлении 2870, кулачковые стенки 2836 зацепляют внутренние поверхности 2840 стенок 2822 и разжимают стенки 2822.
[00212] Как показано на фиг. 31, продольная ось 2880 расширителя 2800 штанги проходит через сквозное отверстие 2864 распорного приспособления 2830. Каждая кулачковая стенка 2836 содержит наклонную поверхность 2882, которая проходит под углом 2884 относительно продольной оси 2880. Угол 2884 может быть в диапазоне от 1 градуса до 18 градусов, например, 4 градуса.
[00213] Что касается фиг. 32, показан расширитель 2800 штанги, соединенный с опорной штангой 2811, причем дуговые стенки 2822 и распорное приспособление 2830 расположены в отверстии 2812 опорной штанги 2811. Дуговые стенки 2822 продвигают в отверстие 2812 до тех пор, пока плечо 2890 расширителя штанги не упрется в торцевую поверхность 2892 опорной штанги 2811. Дуговые стенки 2822 включают в себя дуговые стенки 2822А, 2822В, которые разнесены поперек отверстия 2812 друг от друга. Дуговые стенки 2822А, 2822 В описаны ниже, хотя другие дуговые стенки 2822 будут подвергаться аналогичной операции.
[00214] Первоначально, дуговые стенки 2822А, 2822В расположены с внешними поверхностями 2894, обращенными к внутренней поверхности 2814 опорной штанги 2811. Стенки 2822А, 2822 В имеют первоначальное расстояние 2898 между внутренними поверхностями 2840 стенок 2822А, 2822В.
[00215] Как показано на фиг. 33, пользователь затягивает болт 2850, например, с помощью использования ударного гайковерта, который имеет сдвинутое распорное приспособление 2830, в направлении 2870. Наклонные поверхности 2882 кулачковых стенок 2836 разжимают стенки 2822А, 2822В, которые зацепляют внешнюю поверхность 2894 стенок 2822А, 2822В с внутренней поверхностью 2814 опорной штанги 2811. В одном подходе сдвиг распорного приспособления 2830 создает расстояние 2912 между внутренними поверхностями 2840 стенок 2822А, 2822В больше, чем расстояние 2898, когда расширитель 2800 штанги находится в его первоначальной конфигурации. Это увеличение расстояния 2898 может происходить из-за того, что могут быть радиальные зазоры между дуговыми стенками 2822 и внутренней поверхностью 2814 опорной штанги 2811, имеющие размер, обеспечивающий соединение расширителя 2800 штанги с опорной штангой 2602. Сдвиг распорного приспособления 2830 отклоняет свободные концы 2828 радиально наружу в радиальные зазоры и в контакт с внутренней поверхностью 2814 опорной штанги 2811.
[00216] Движение распорного приспособления 2830 в направлении 2870 может постоянно деформировать материал дуговых стенок 2822. Деформирование стенок 2822 напротив опорной штанги 2811 постоянно прикрепляет расширитель 2800 штанги к опорной штанге 2811. Затем пользователь может прикрепить сенсорный модуль 2600 к расширителю 2800 штанги.
[00217] В одном варианте осуществления компоненты расширителя 2800 штанги сделаны из одного или нескольких жестких, металлических материалов, таким как сталь. Жесткие материалы расширителя 2800 штанги и надежная фиксация, обеспечиваемая распорным приспособлением 2830 и дуговыми стенками 2822, вызывают вибрацию расширителя 2800 штанги по существу аналогично опорной штанге 2811. Таким образом, сенсорный модуль 2600 может измерять одну или несколько характеристик расширителя 2800 штанги, когда расширитель штанги вибрирует с опорной штангой 2811 во время работы конвейерной ленты.
[00218] В одном варианте осуществления поперечный штифт 2854 запрессован в сквозное отверстие 2856. В другом варианте осуществления поперечный штифт 2854 приварен в сквозное отверстие 2856. Исполнительный механизм 2849 и распорное приспособление 2830 могут иметь ряд конфигураций для поступательного движения исполнительного механизма 2849 со сдвигом распорного приспособления 2830 в направлении 2870. Например, исполнительный механизм 2849 может содержать гайку, накрученную на вал распорного приспособления 2830. Поворот гайки сдвигает вал и распорное приспособление 2830 в направлении 2870. В другом варианте осуществления исполнительный механизм 2849 может сдвигаться в осевом направлении без вращения, обеспечивая сдвиг распорного приспособления 2830 в направлении 2870.
[00219] Специалисту в данной области будет понятно, что большое множество модификаций, изменений и комбинаций может быть сделано относительно описанных выше вариантов осуществления без отклонения от сути и объема изобретения, и что такие модификации и замены и комбинации следуем рассматривать в рамках формулы изобретения. Например, хотя этапы способа могут быть представлены и описаны в данном документе последовательно, один или несколько показанных и описанных этапов могут быть исключены, повторяться, выполняться одновременно и/или выполняться в другом порядке, чем порядок, показанный на фигурах и/или описанный в данном документе. Кроме того, должно быть понятно, что машиночитаемые команды для облегчения описанных выше способов можно хранить на разных машиночитаемых носителях для долговременного хранения, которые известны в данной области.
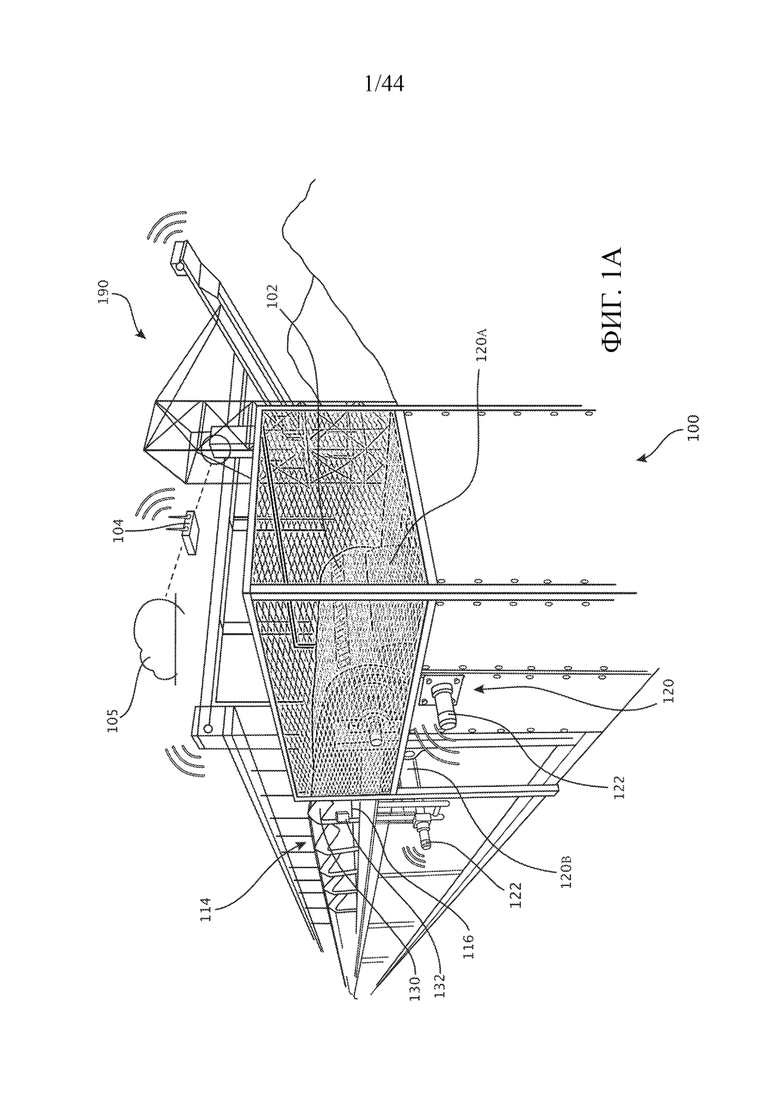
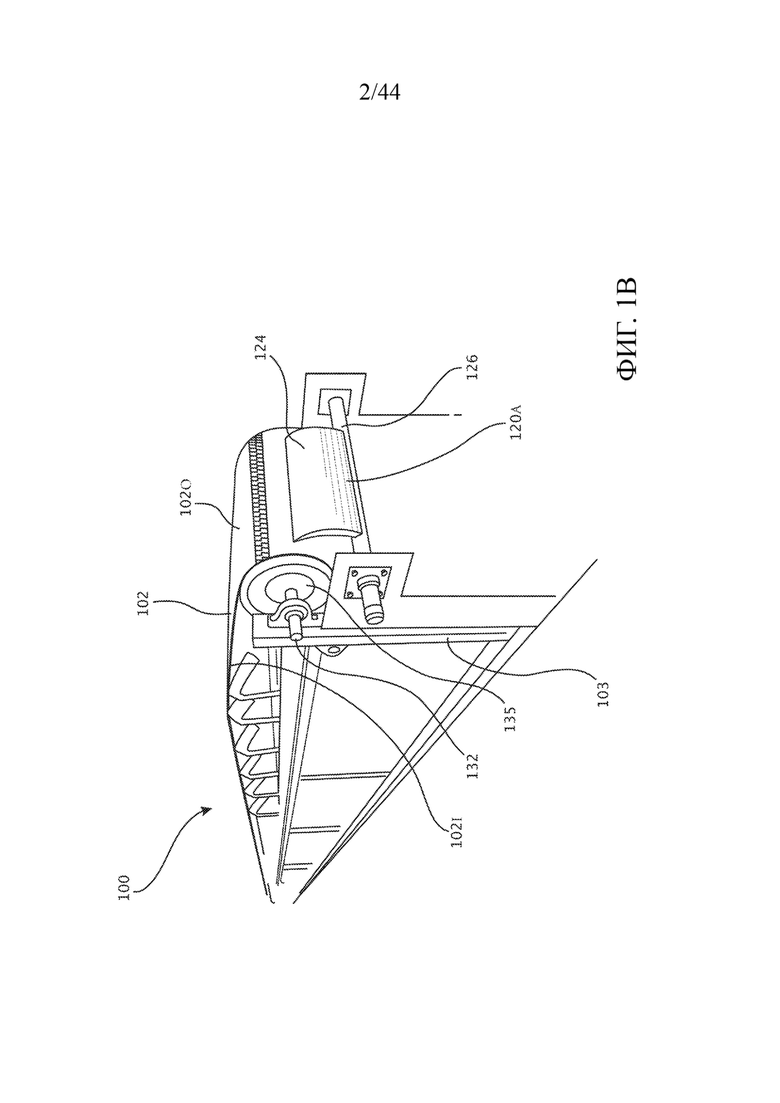
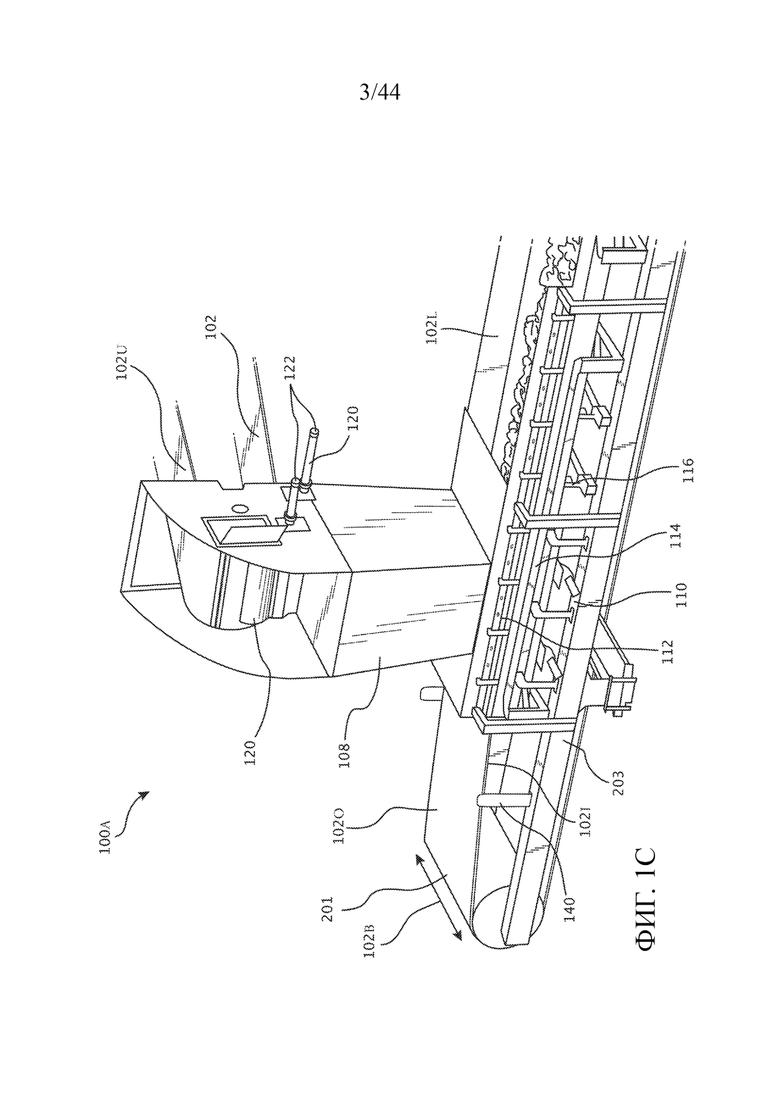
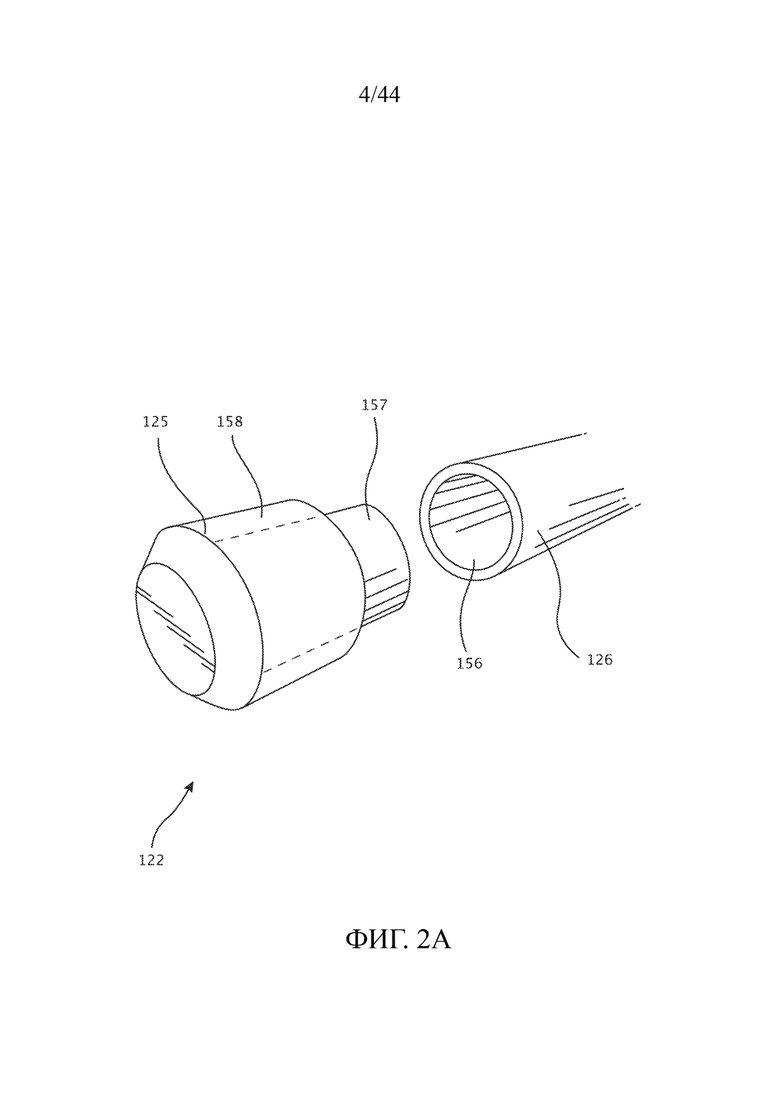
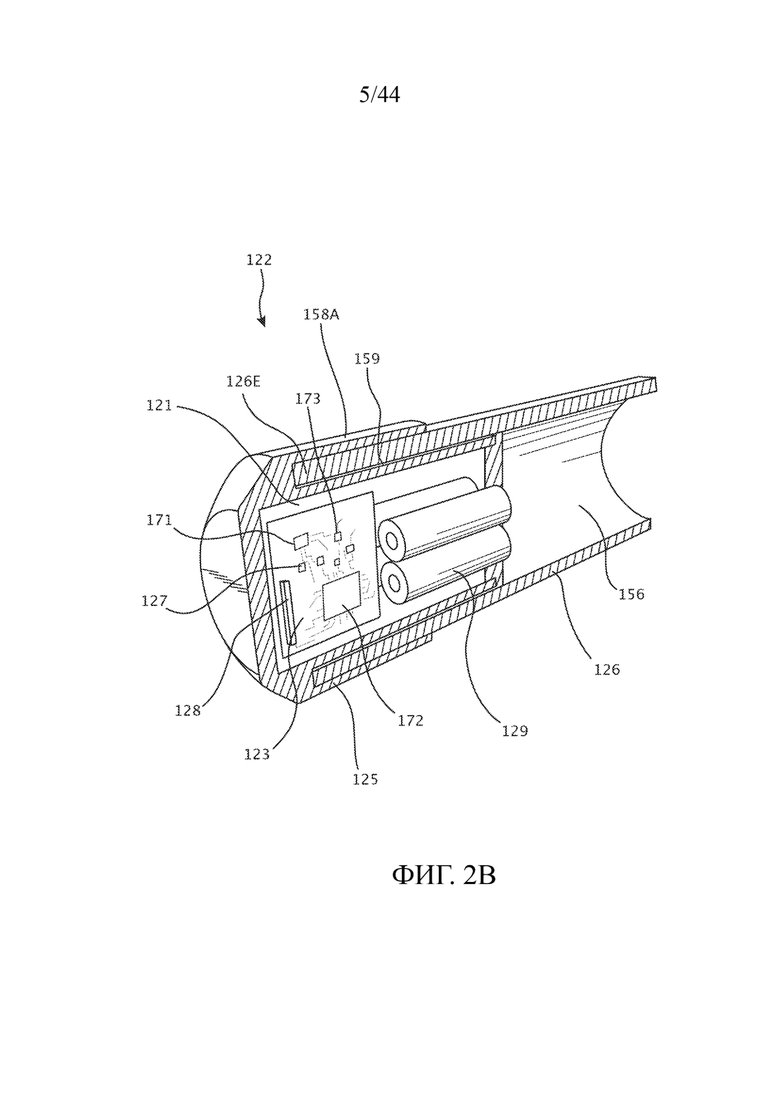
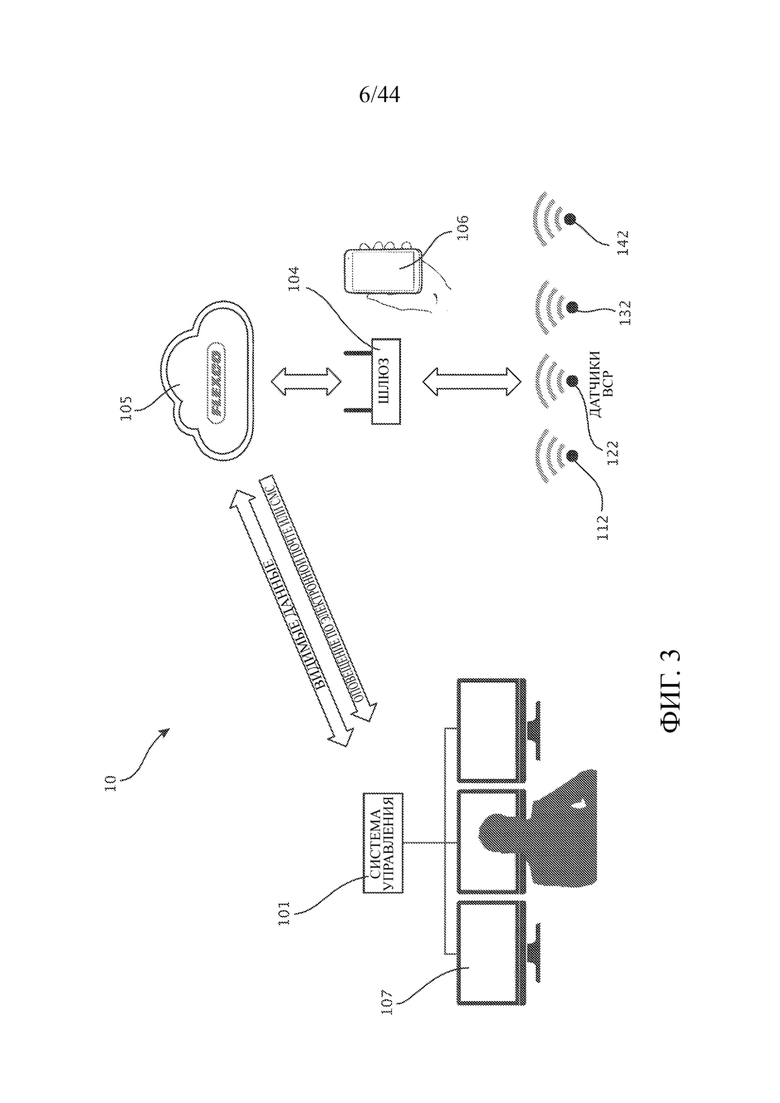
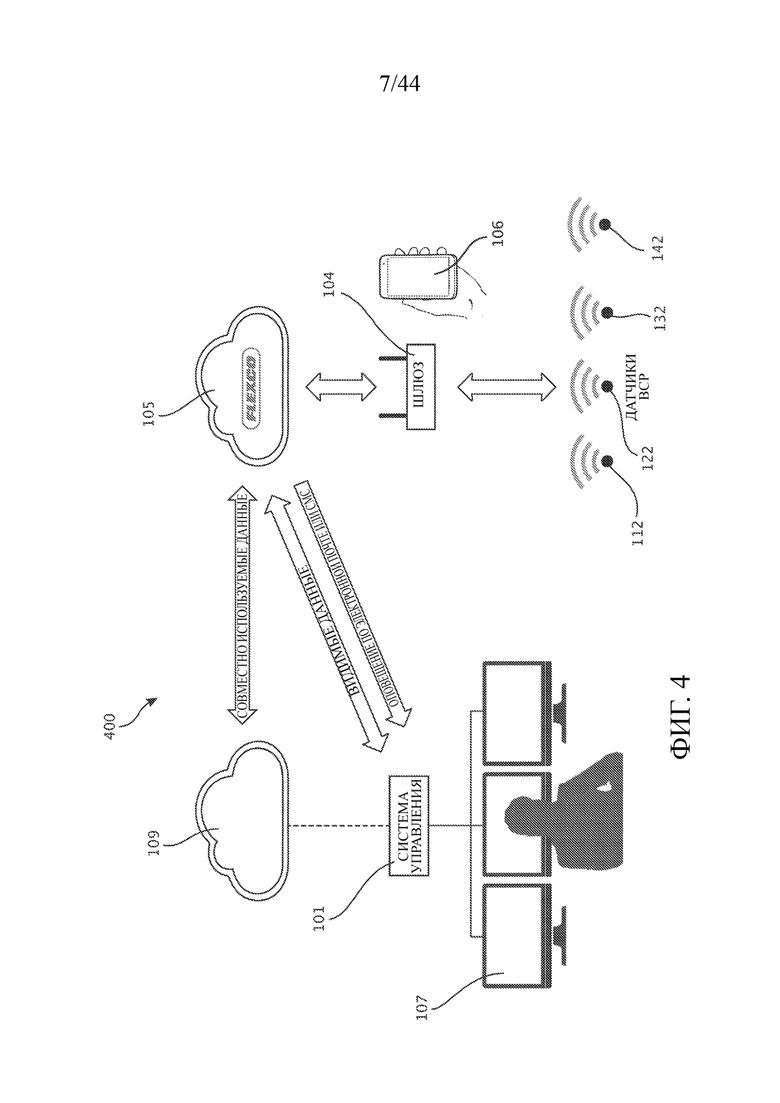
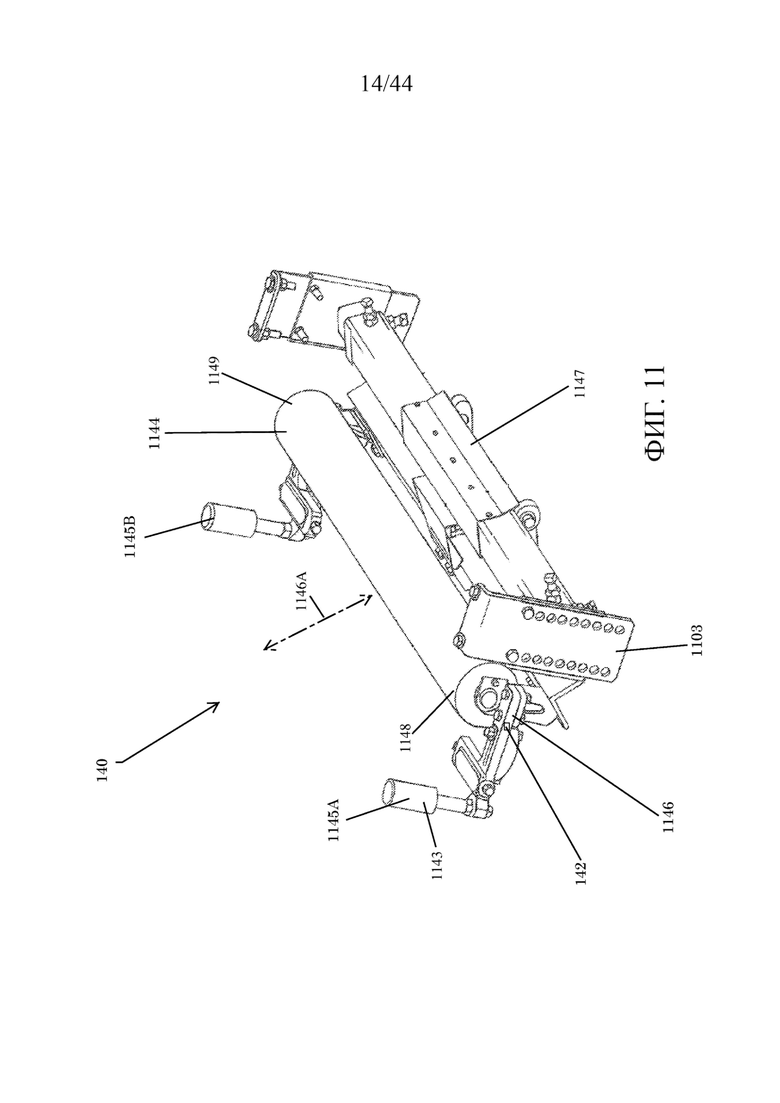
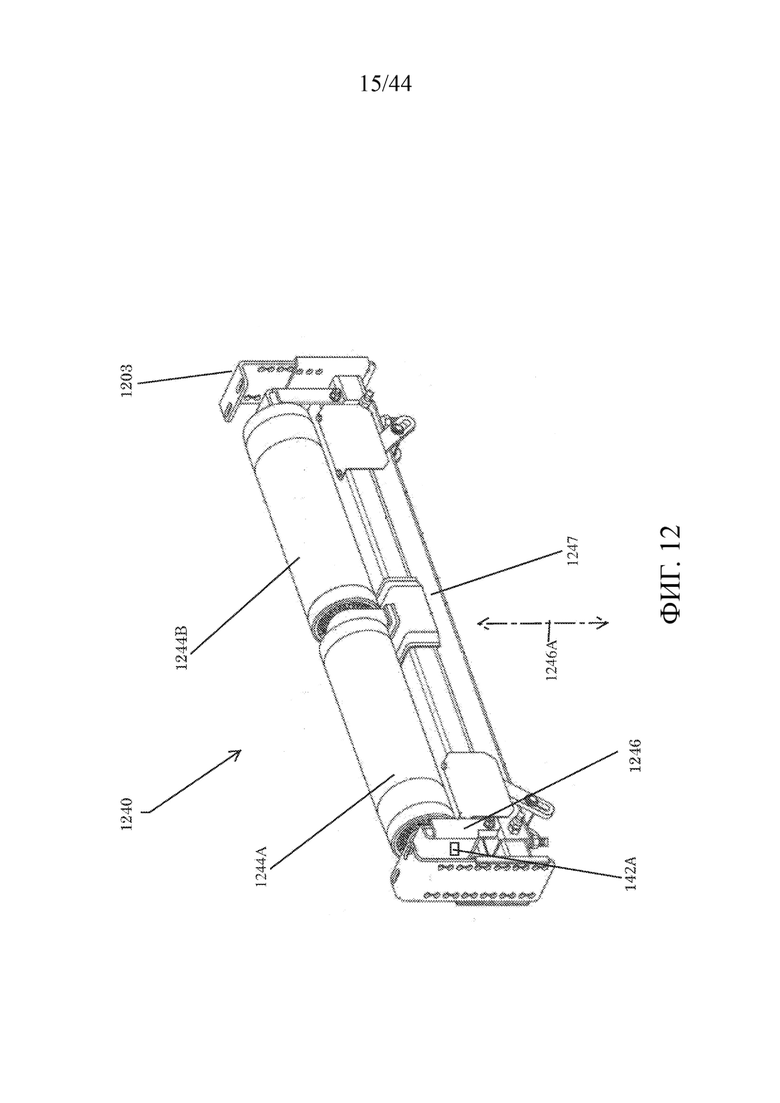
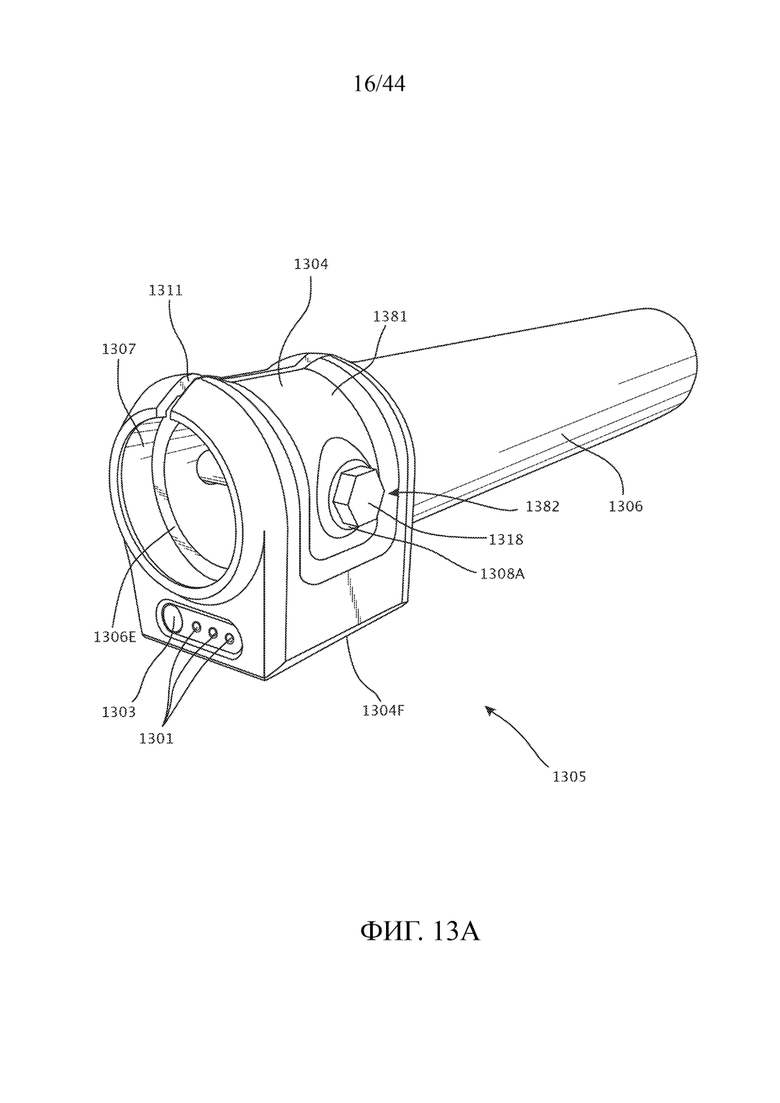
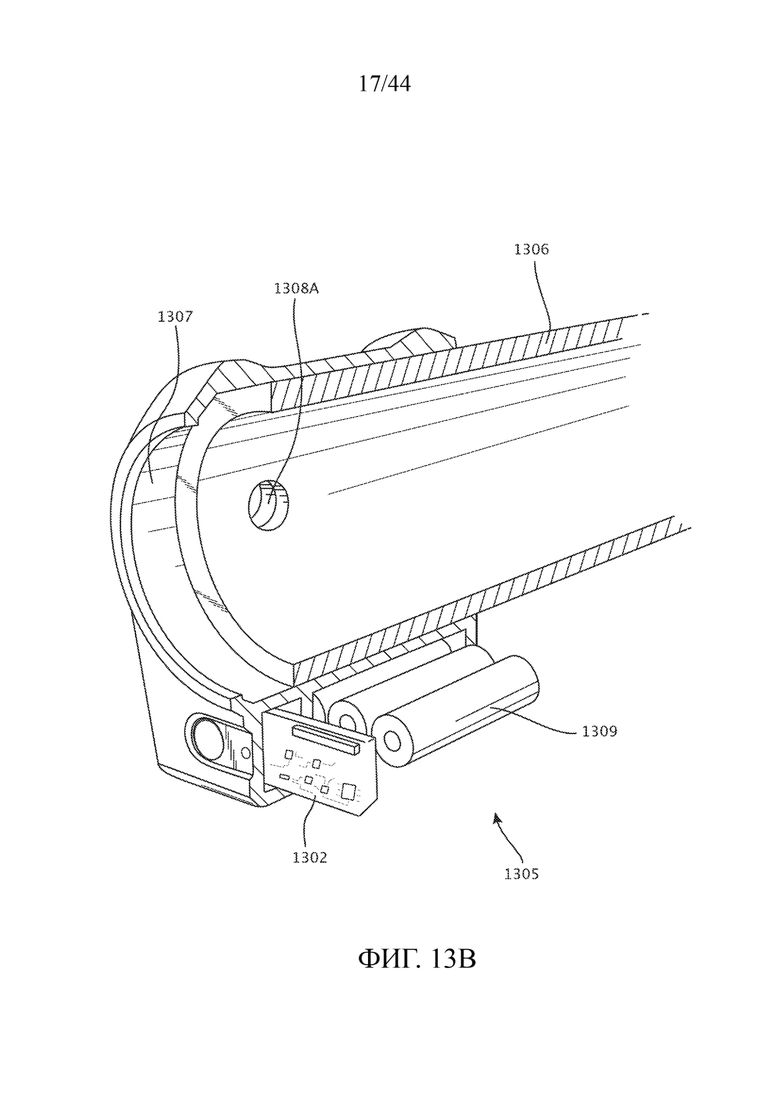
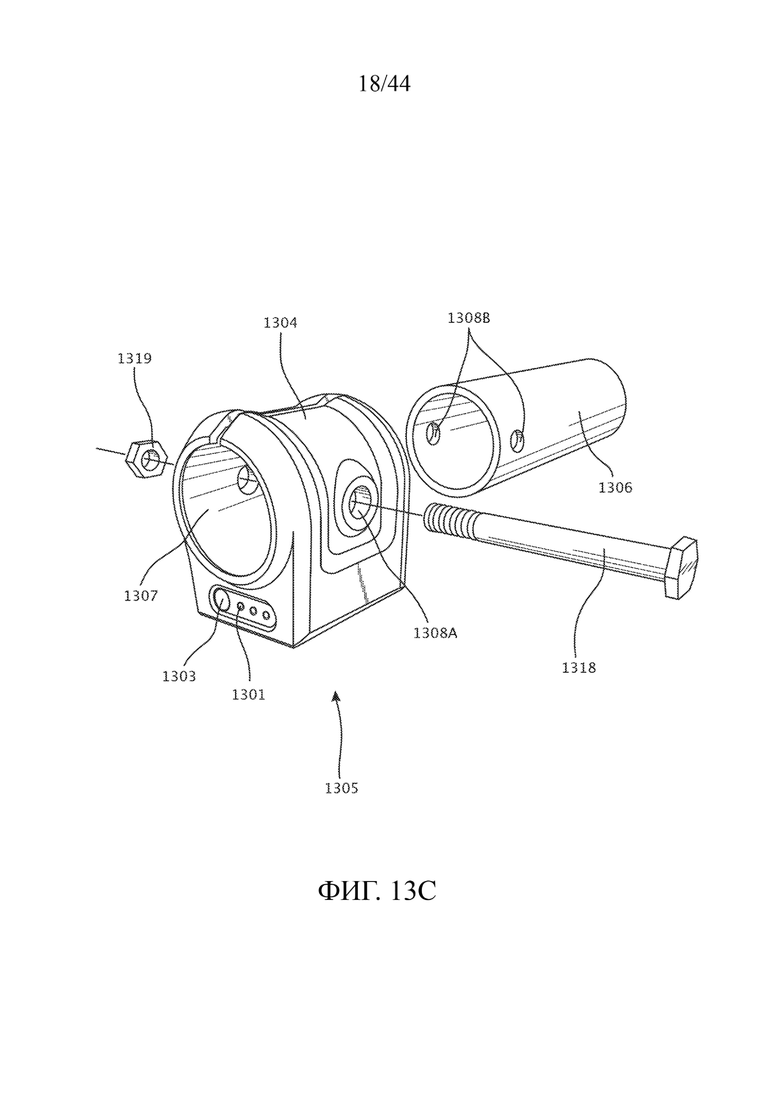
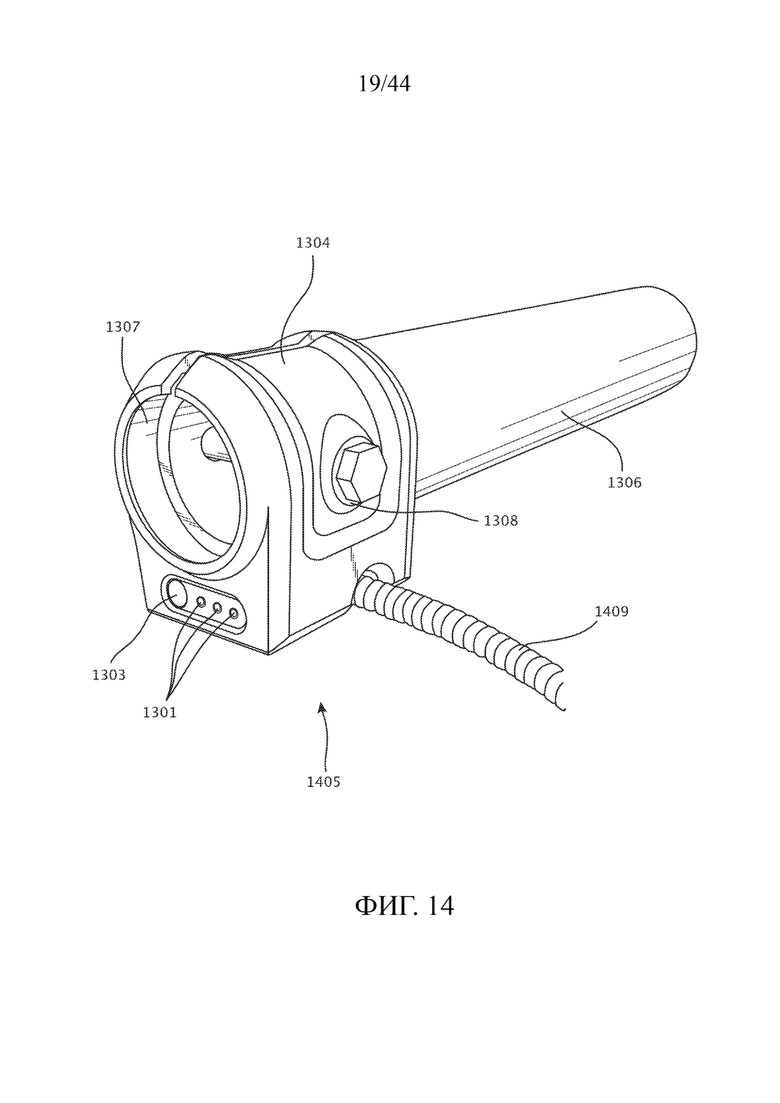
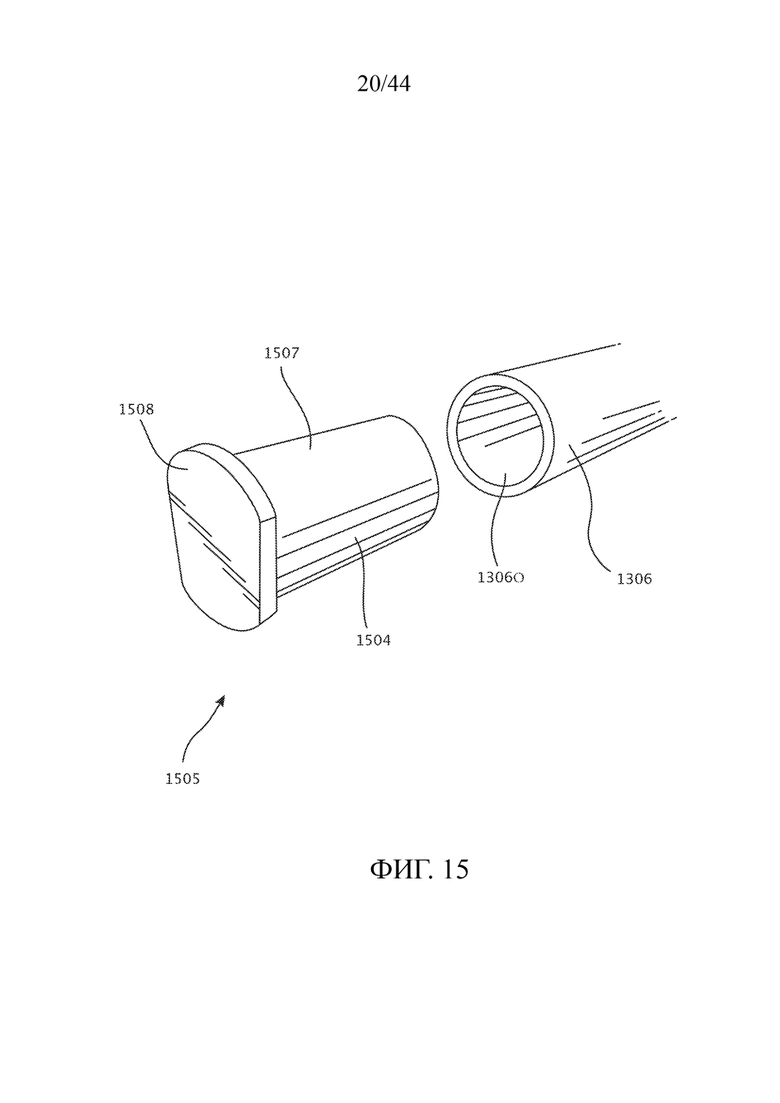
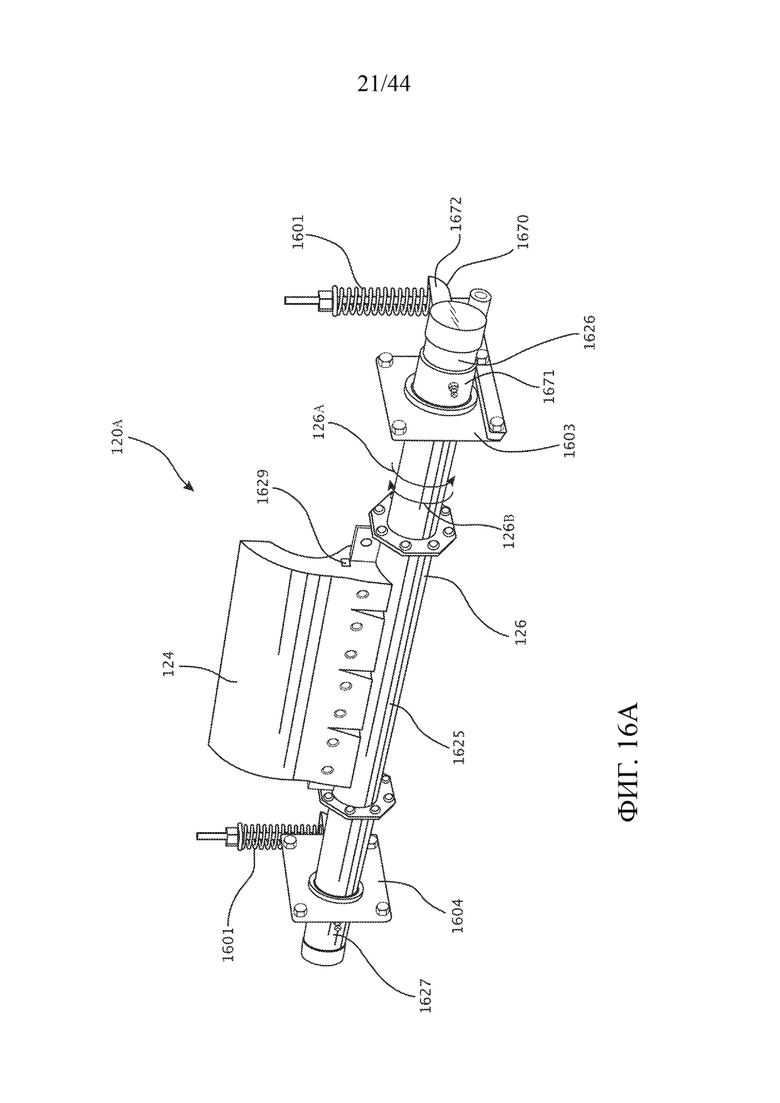
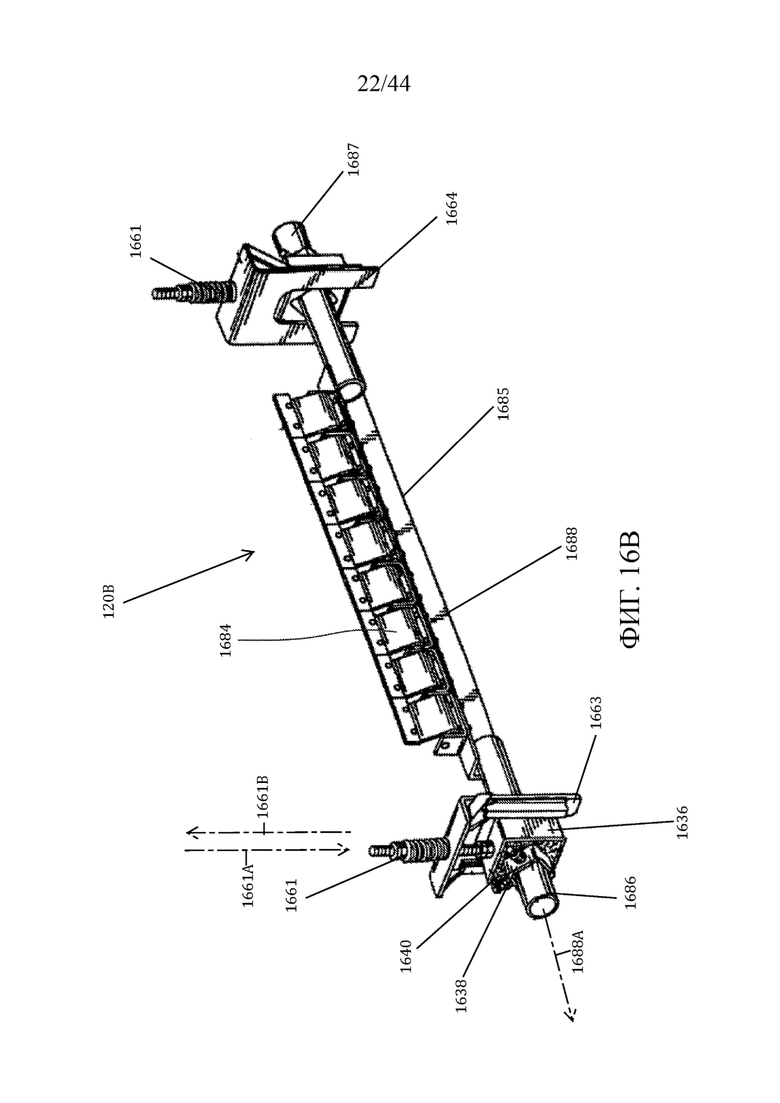
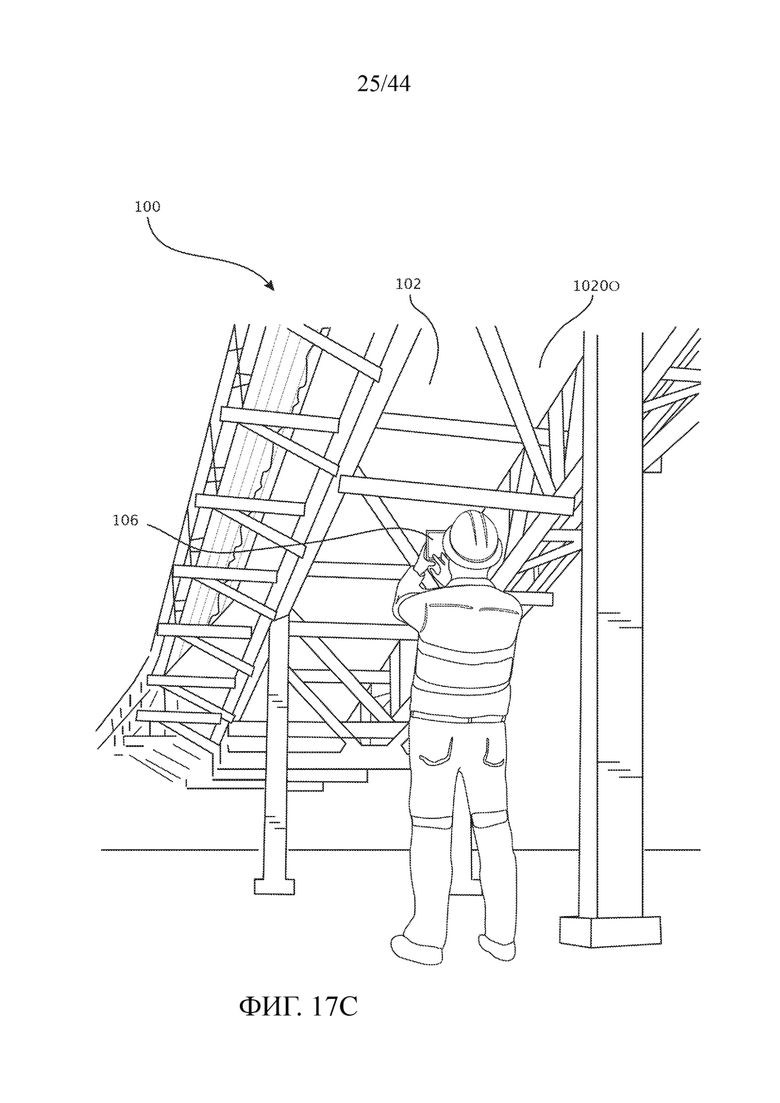
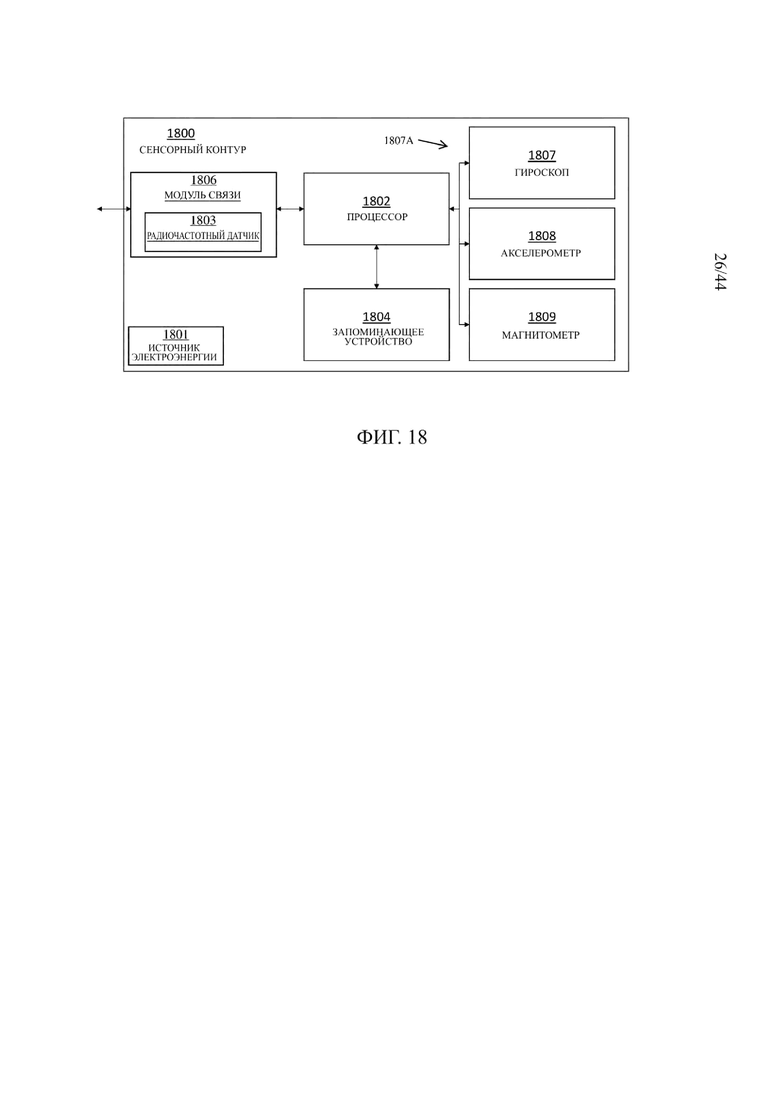
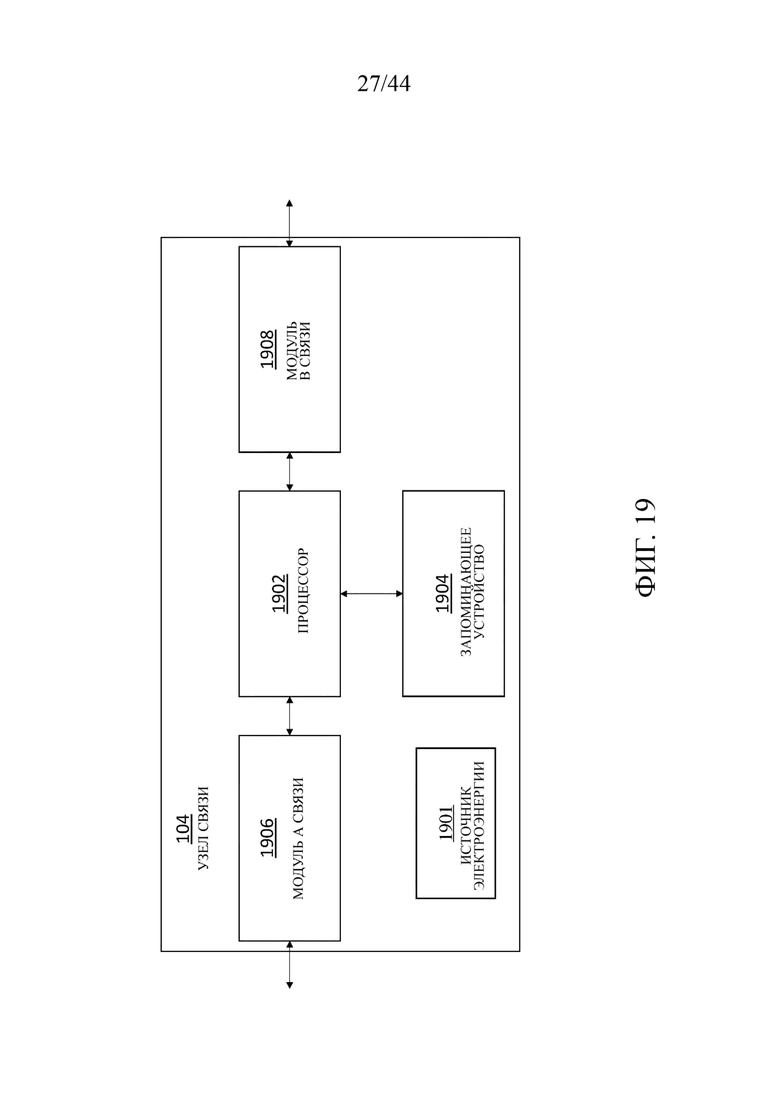
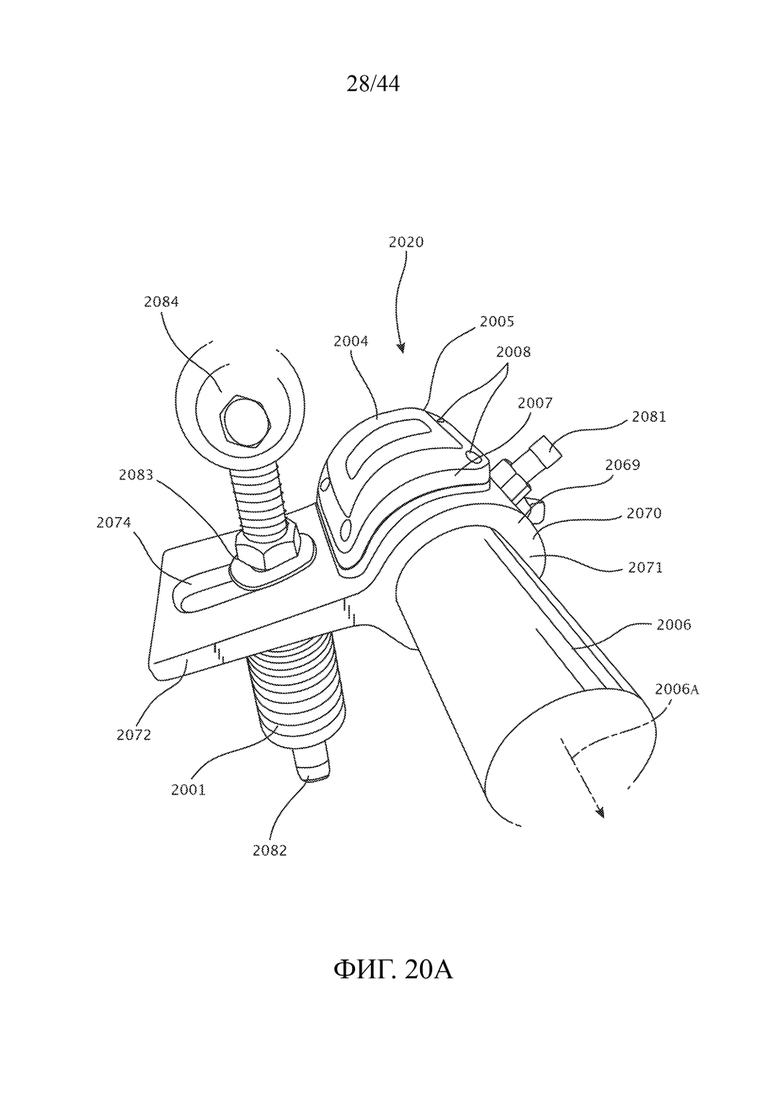
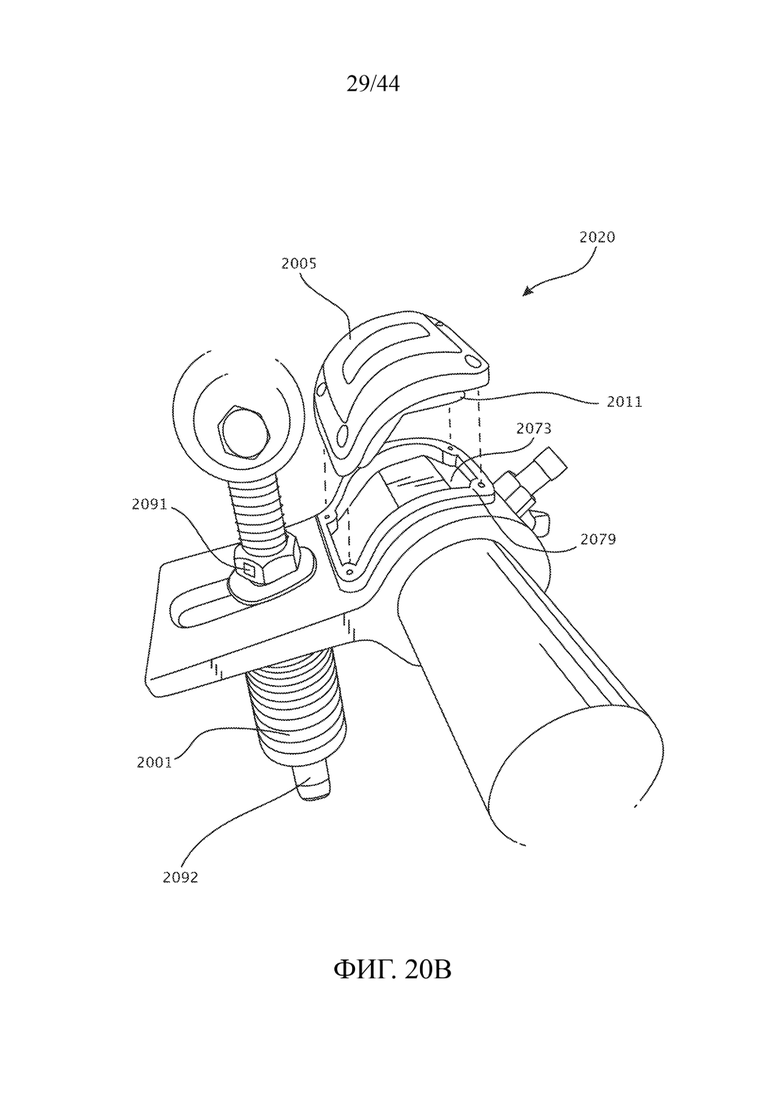

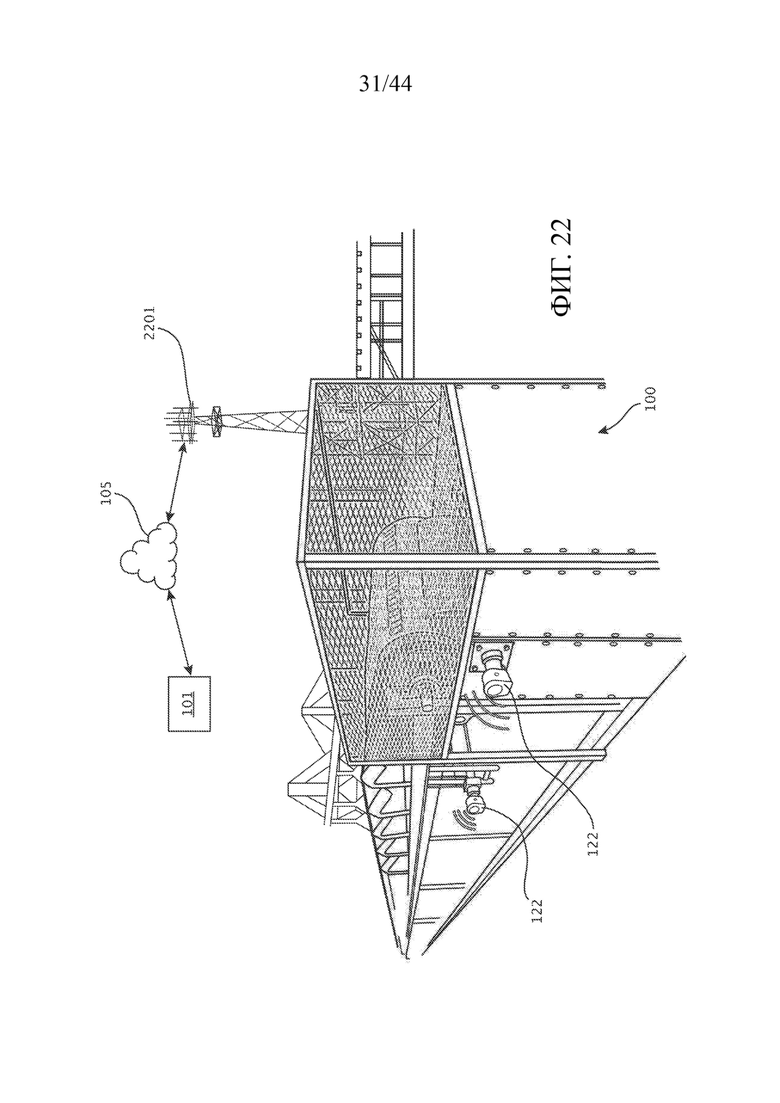
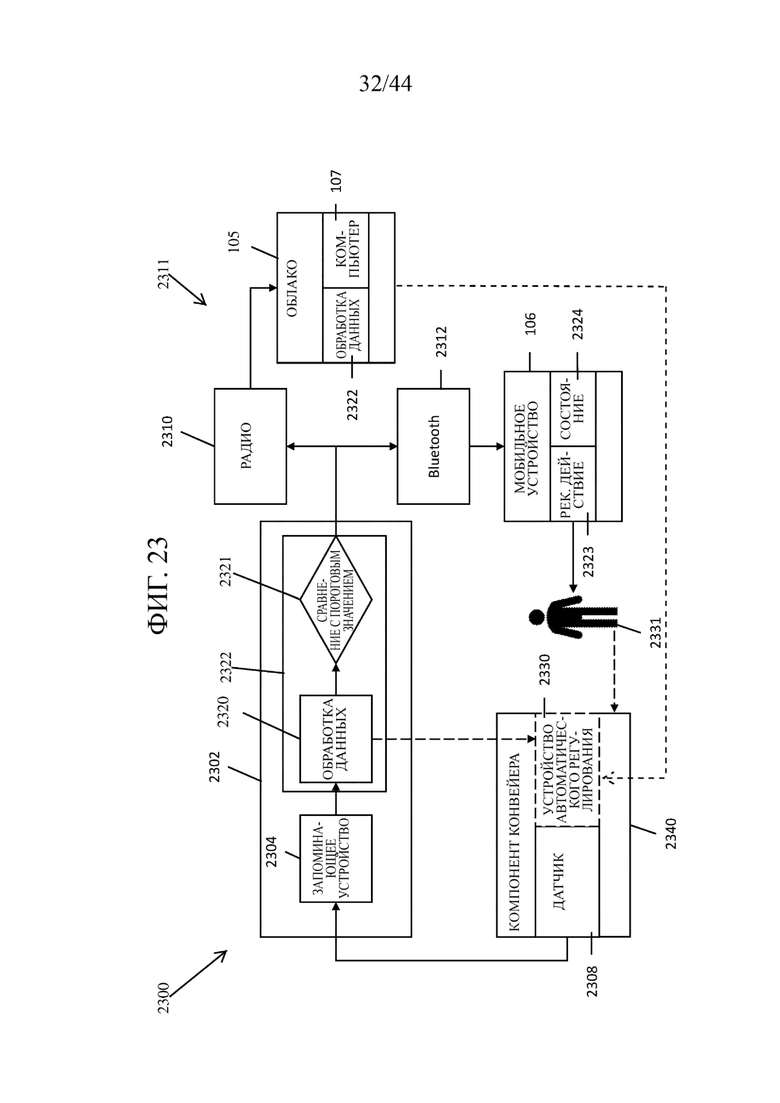
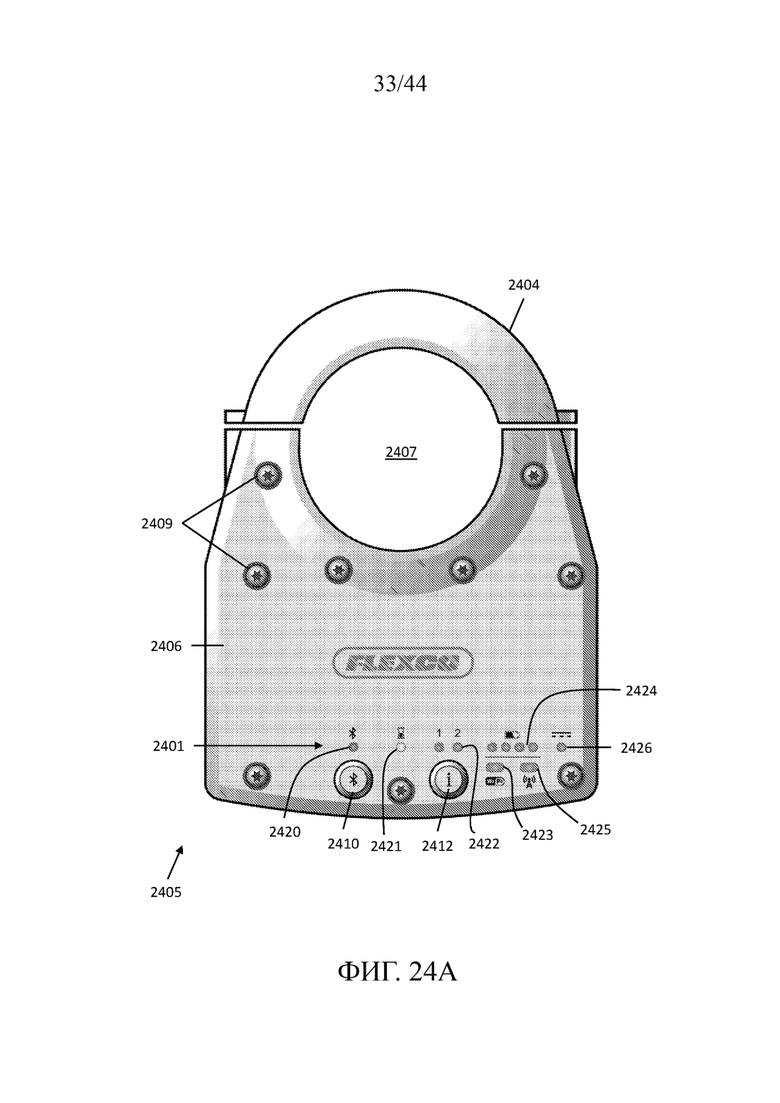
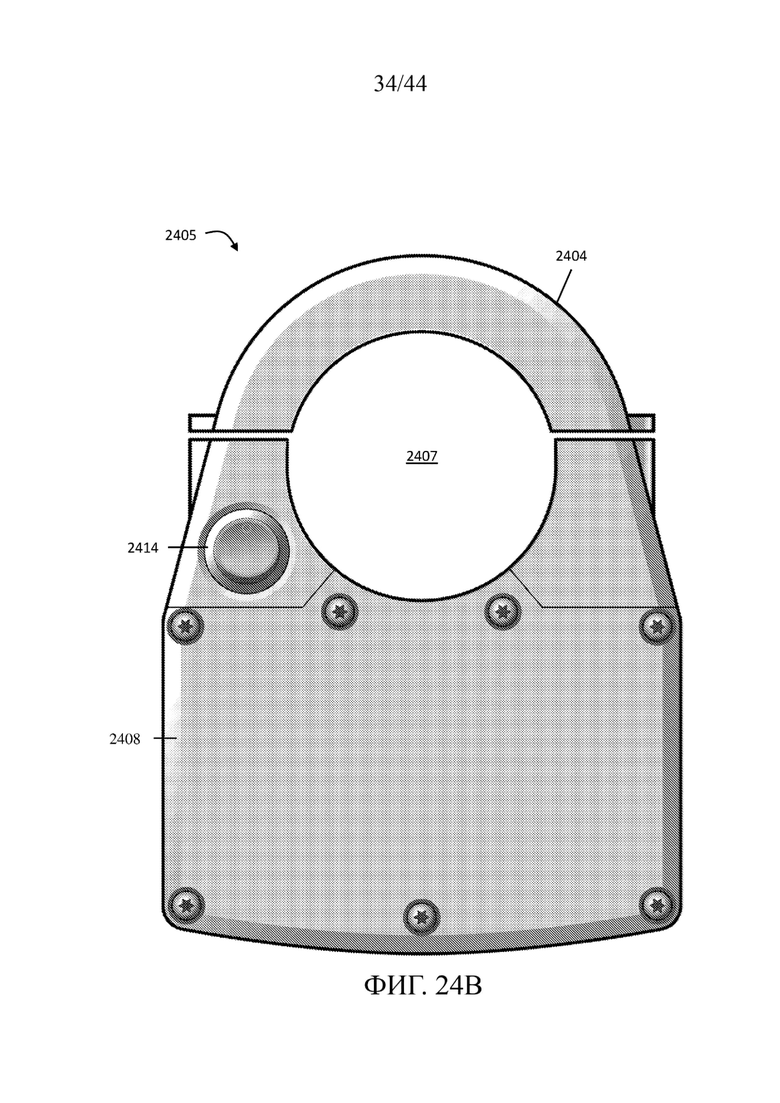
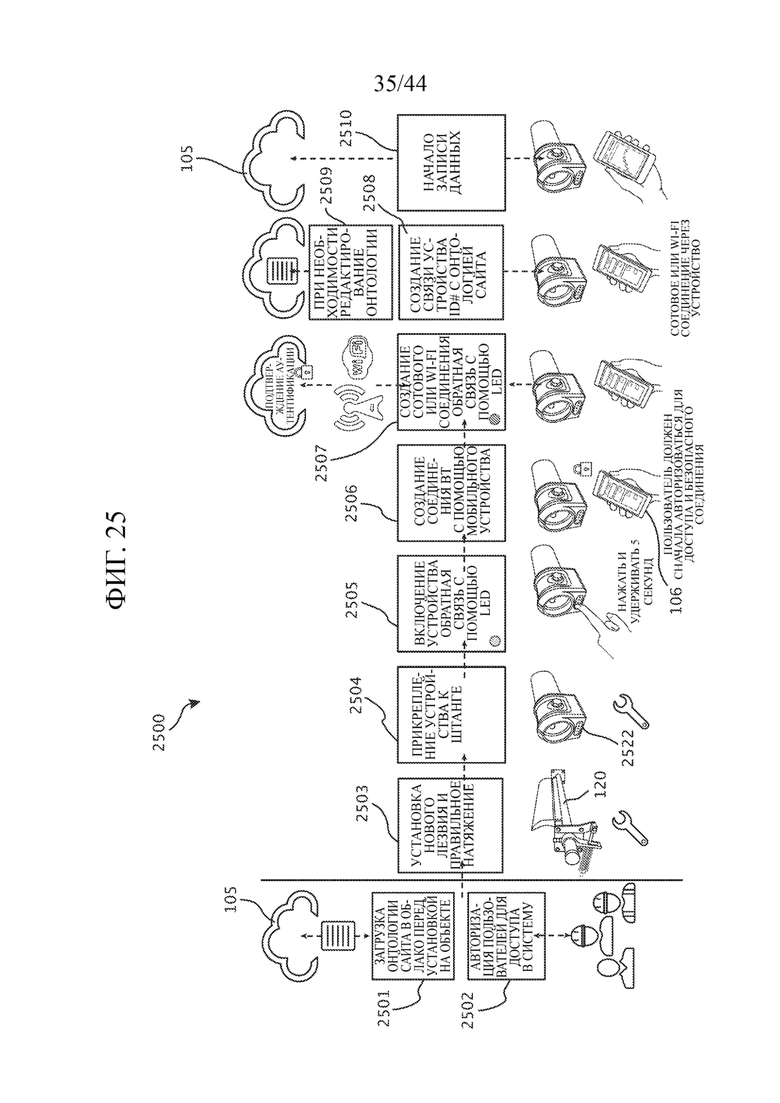
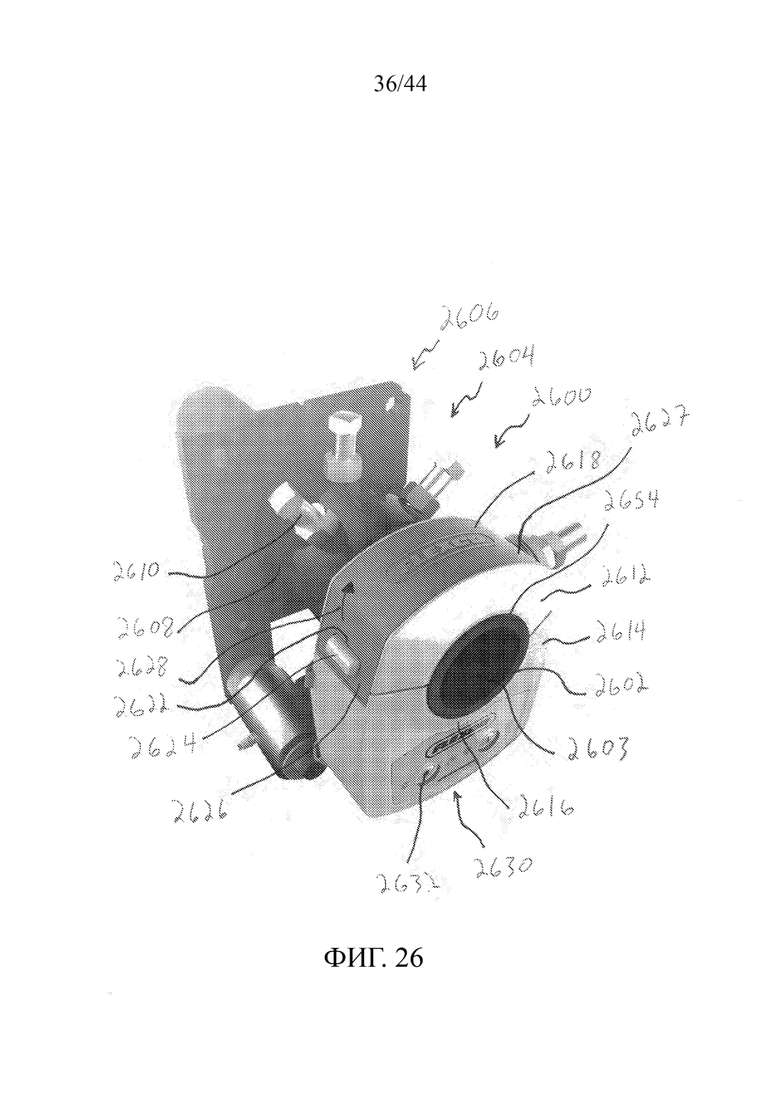
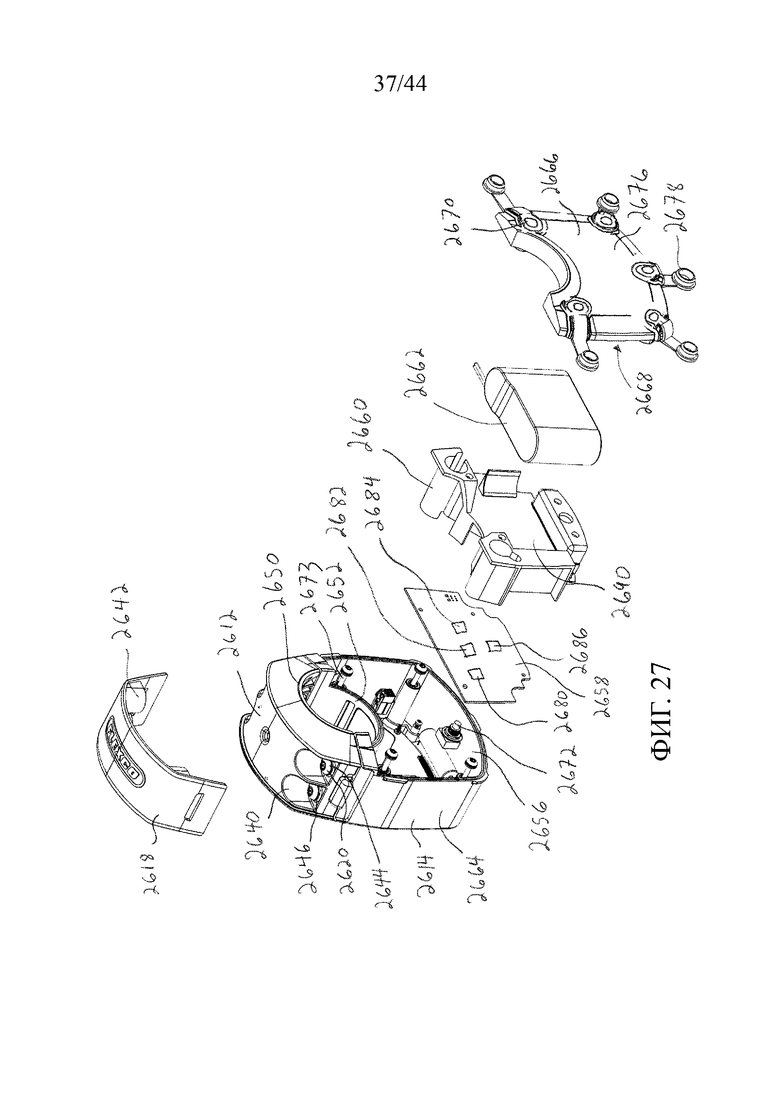
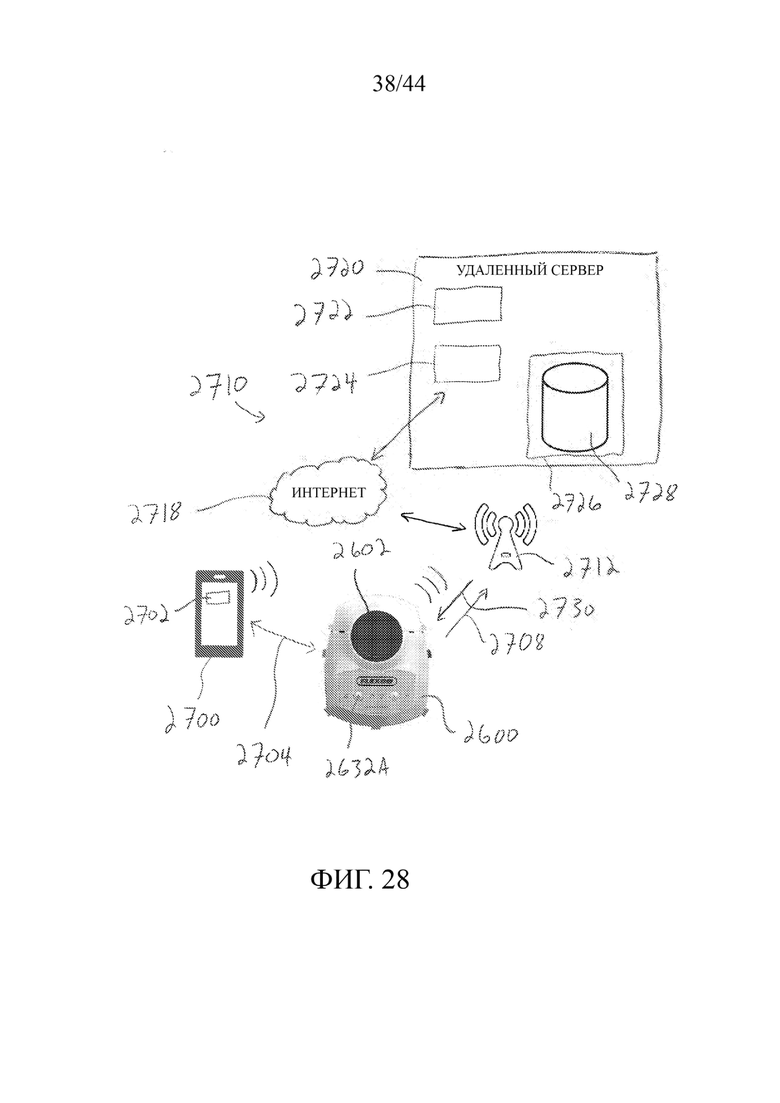
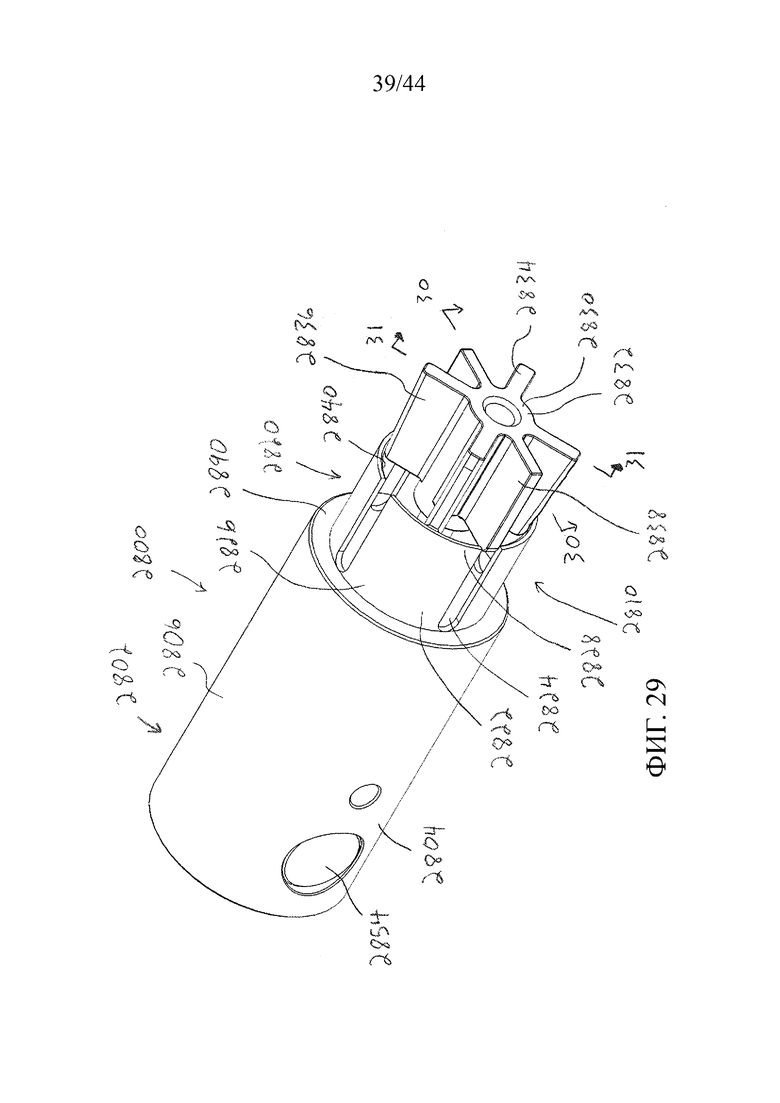
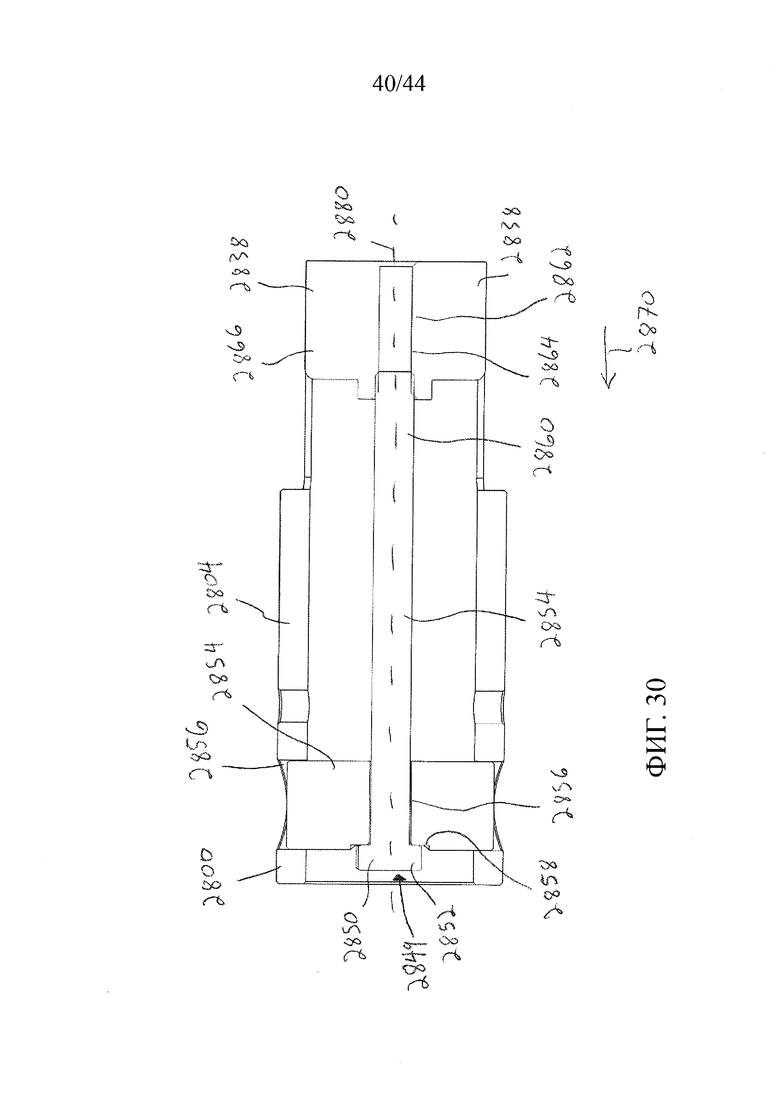
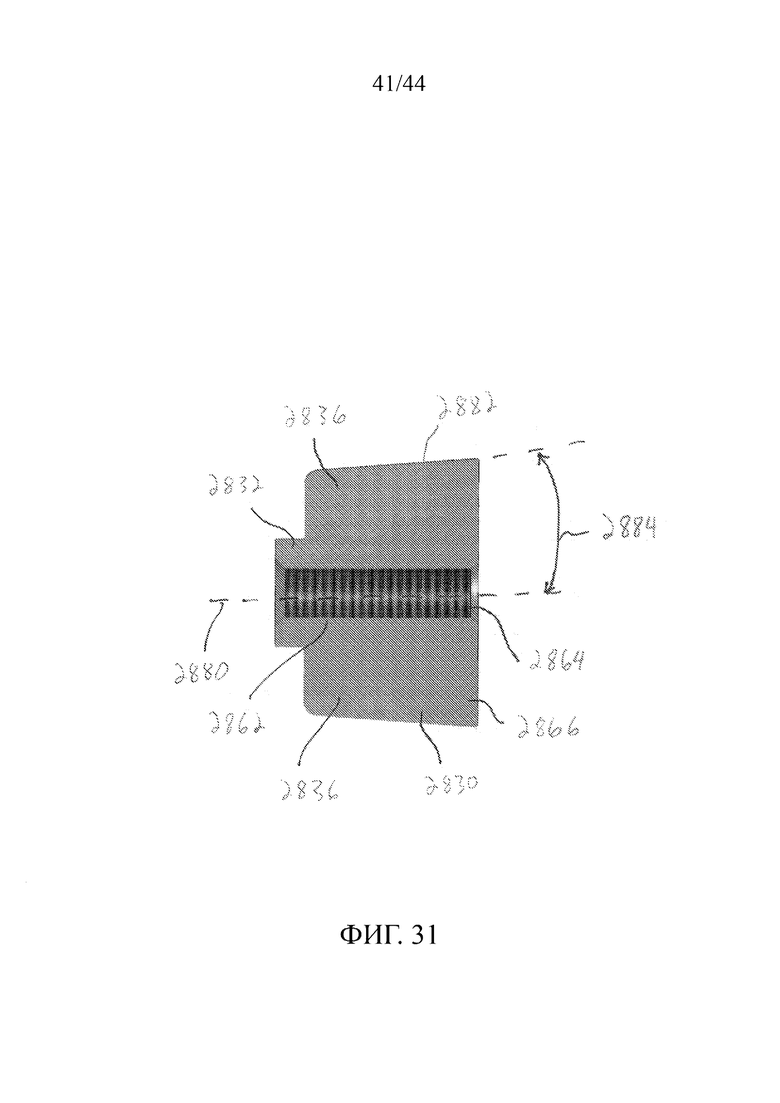
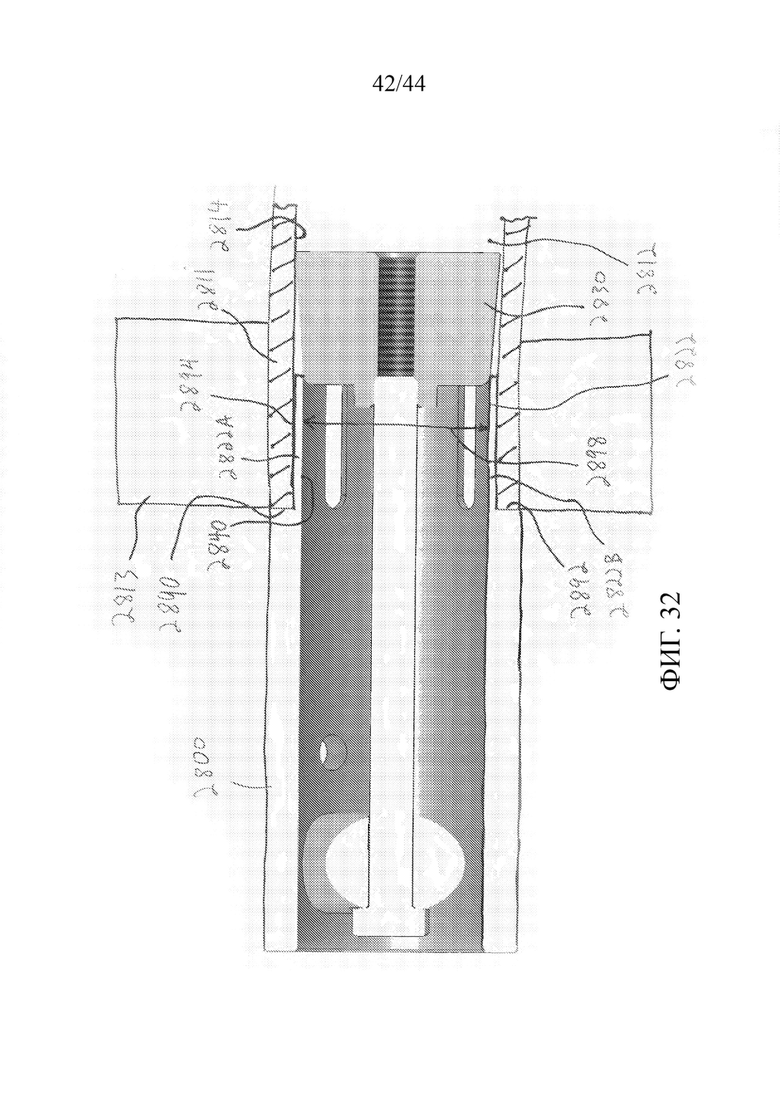
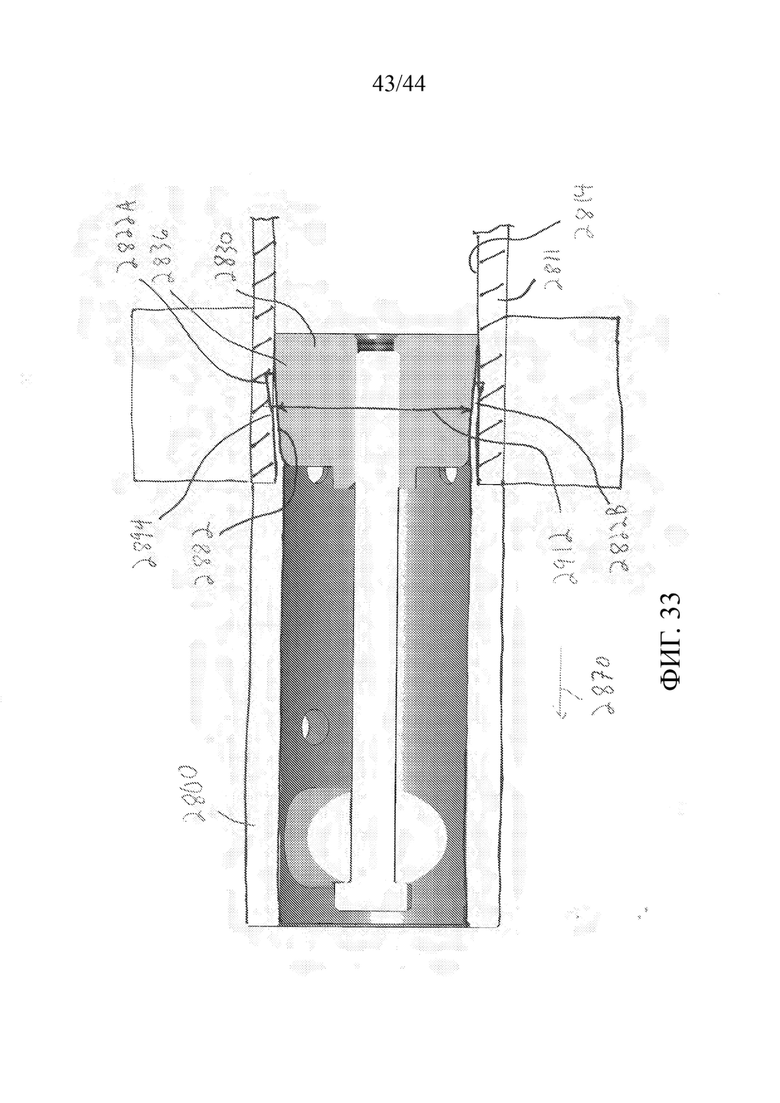
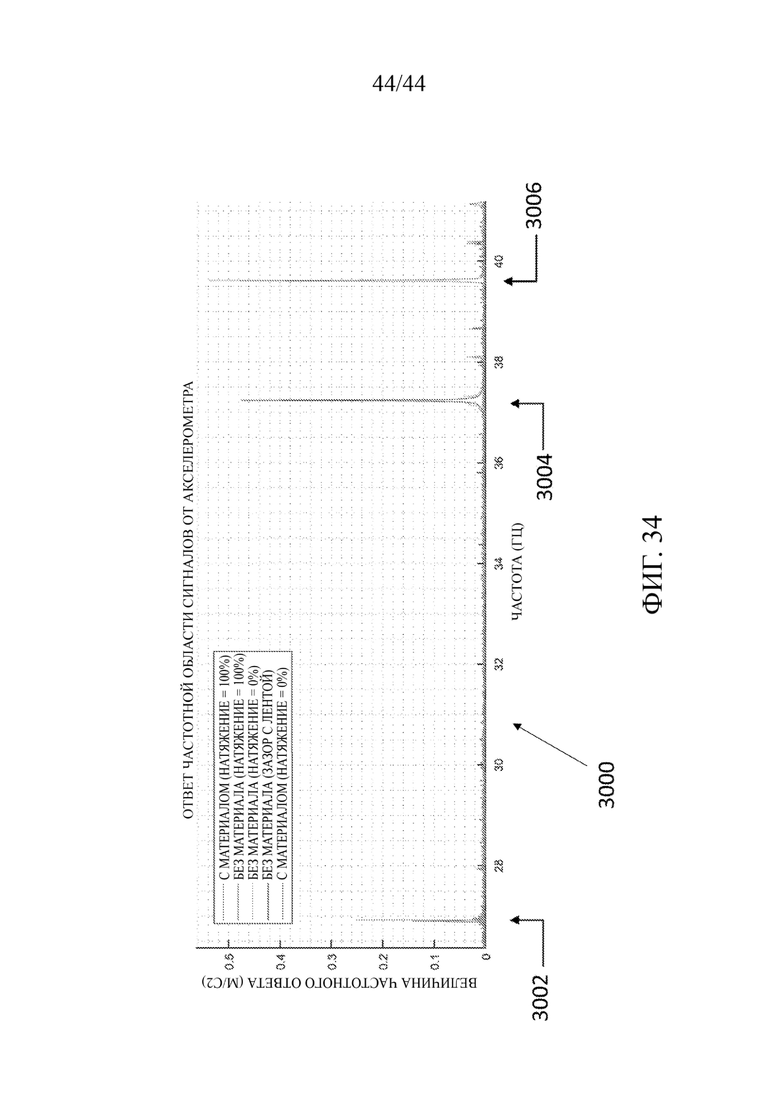
В одном аспекте представлено устройство для конвейерной ленточной системы. Устройство содержит устройство очистки конвейерной ленты, имеющее удлиненную опору и пару креплений, выполненных с возможностью расположения удлиненной опоры с прохождением поперек конвейерной ленты. Устройство содержит чистящее лезвие, выполненное с возможностью функционального прикрепления к удлиненной опоре и зацепления конвейерной ленты. Устройство дополнительно содержит датчик, выполненный с возможностью определения по меньшей мере одной характеристики удлиненной опоры, когда удлиненная опора вибрирует во время работы конвейерной ленты. Процессор устройства выполнен с возможностью использования по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства чистящего лезвия. Это защищает датчик, обеспечивая в то же время нужную информацию о конвейерной ленточной системе. 2 н. и 41 з.п. ф-лы, 44 ил.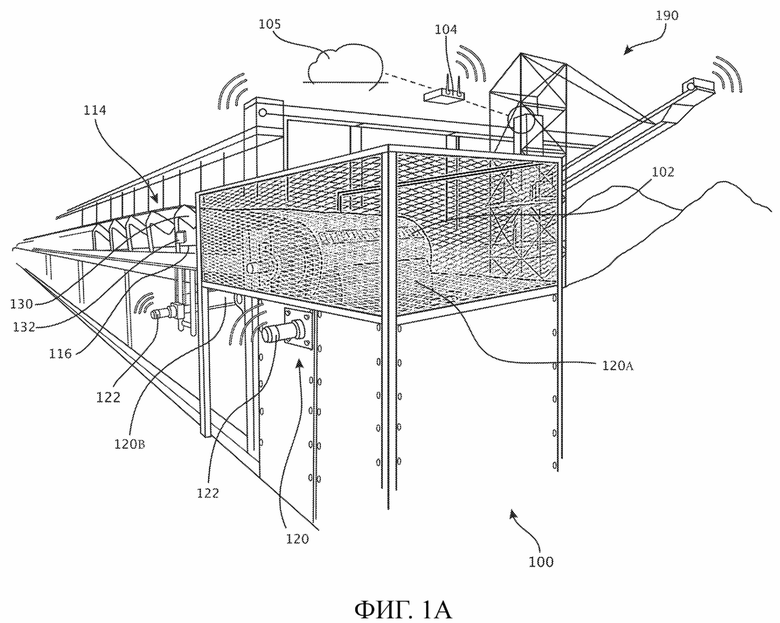
1. Сенсорное устройство для мониторинга устройства очистки конвейерной ленты конвейерной ленточной системы, причем устройство очистки конвейерной ленты содержит удлиненную опору и чистящее лезвие, выполненное с возможностью функционального прикрепления к удлиненной опоре и зацепления конвейерной ленты, причем сенсорное устройство содержит:
сенсорный модуль, имеющий отверстие, имеющее размер для приема удлиненной опоры и обеспечения прикрепления сенсорного модуля к удлиненной опоре;
датчик сенсорного модуля, выполненный с возможностью определения по меньшей мере одной характеристики удлиненной опоры;
схему связи сенсорного модуля, причем схема связи выполнена с возможностью беспроводной передачи данных, связанных по меньшей мере с одной характеристикой удлиненной опоры, в узел связи; и
аккумулятор сенсорного модуля, обеспечивающий электроэнергию для датчика и схемы связи.
2. Сенсорное устройство по п. 1, дополнительно содержащее процессор, выполненный с возможностью использования по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы.
3. Сенсорное устройство по п. 2, в котором по меньшей мере одно свойство конвейерной ленточной системы представляет собой оставшийся срок службы чистящего лезвия.
4. Сенсорное устройство по п. 2, в котором процессор выполнен с возможностью прогнозирования по меньшей мере одного свойства конвейерной ленточной системы, включая по меньшей мере одно свойство чистящего лезвия устройства очистки конвейерной ленты.
5. Сенсорное устройство по п. 2, в котором процессор выполнен с возможностью прогнозирования по меньшей мере одного свойства конвейерной ленточной системы, включая по меньшей мере одно свойство конвейерной ленты.
6. Сенсорное устройство по п. 2, дополнительно содержащее запоминающее устройство, выполненное с возможностью хранения исторических данных вибрации для второй удлиненной опоры второго устройства очистки конвейерной ленты второй конвейерной ленточной системы, причем процессор выполнен с возможностью использования по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы по меньшей мере частично путем сравнения по меньшей мере одной характеристики с историческими данными вибрации второй конвейерной ленточной системы.
7. Сенсорное устройство по п. 2, дополнительно содержащее запоминающее устройство, выполненное с возможностью хранения исторических данных вибрации для удлиненной опоры устройства очистки конвейерной ленты, причем процессор выполнен с возможностью использования по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы по меньшей мере частично путем сравнения по меньшей мере одной характеристики с историческими данными вибрации.
8. Сенсорное устройство по п. 2, в котором процессор выполнен с возможностью использования по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы по меньшей мере частично путем вычисления основной частоты по меньшей мере одной характеристики удлиненной опоры и сопоставления основной частоты с по меньшей мере одним свойством конвейерной ленточной системы.
9. Сенсорное устройство по п. 2, в котором по меньшей мере одна характеристика включает в себя ускорение удлиненной опоры, скорость вращения удлиненной опоры или их комбинацию; и
по меньшей мере одно свойство конвейерной ленточной системы включает в себя натяжение лезвия, сцеплено ли чистящее лезвие с конвейерной лентой, вибрирует ли чистящее лезвие или их комбинацию.
10. Сенсорное устройство по п. 2, дополнительно содержащее интерфейс связи, функционально соединенный с процессором и выполненный с возможностью приема идентификационных данных, представляющих по меньшей мере одно физическое свойство устройства очистки конвейерной ленты, причем процессор выполнен с возможностью выбора по меньшей мере части алгоритма, представляющего физическую работу устройства очистки конвейерной ленты на основании идентификационных данных.
11. Сенсорное устройство по п. 2, дополнительно содержащее второй процессор сенсорного модуля, причем второй процессор функционально соединен с датчиком и схемой связи, причем схема связи выполнена с возможностью обмена данными посредством узла связи и сети с удаленным компьютером, который содержит процессор, причем второй процессор выполнен с возможностью обеспечения передачи схемой связи данных, представляющих по меньшей мере одну характеристику удлиненной опоры, на удаленный компьютер.
12. Сенсорное устройство по п. 2 в комбинации с конвейерной ленточной системой, в которой чистящее лезвие включает в себя множество чистящих лезвий, а по меньшей мере одно свойство конвейерной ленточной системы включает в себя по меньшей мере одно свойство каждого из чистящих лезвий.
13. Сенсорное устройство по п. 1 в комбинации с устройством очистки конвейерной ленты, причем устройство очистки конвейерной ленты содержит удлиненную опору и пару креплений, выполненных с возможностью поддержки и позиционирования удлиненной опоры с прохождением поперек конвейерной ленты; и
при этом сенсорный модуль содержит корпус, имеющий отверстие, причем корпус выполнен с возможностью прикрепления к удлиненной опоре, в то время как удлиненная опора опирается на пару креплений и расположена с прохождением поперек конвейерной ленты.
14. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит корпус, причем датчик находится внутри корпуса.
15. Сенсорное устройство по п. 1 в комбинации с узлом связи, причем узел связи выполнен с возможностью беспроводного получения данных от множества сенсорных модулей.
16. Сенсорное устройство по п. 1 в комбинации с узлом связи, причем узел связи выполнен с возможностью обмена данными по протоколу сотовой связи.
17. Сенсорное устройство по п. 1, дополнительно содержащее процессор сенсорного модуля, функционально соединенный с датчиком и схемой связи, причем процессор выполнен с возможностью обеспечения передачи схемой связи данных, связанных по меньшей мере с одной характеристикой удлиненной опоры, в узел связи.
18. Сенсорное устройство по п. 1, в котором по меньшей мере одна характеристика включает в себя положение удлиненной опоры.
19. Сенсорное устройство по п. 1, в котором датчик выполнен с возможностью определения:
изменения положения удлиненной опоры;
расстояния поворота, которое проходит удлиненная опора; или
по меньшей мере их комбинации.
20. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит зажим, выполненный с возможностью прикрепления сенсорного модуля к удлиненной опоре.
21. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит зажимную часть сенсорного модуля, имеющую внутреннюю поверхность, проходящую вокруг отверстия, причем зажимная часть выполнена с возможностью прижимания внутренней поверхности к внешней поверхности удлиненной опоры и прикрепления сенсорного модуля к удлиненной опоре.
22. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит муфтовую часть, проходящую вокруг отверстия, причем муфтовая часть имеет пару концов, разделенных зазором, при этом сенсорный модуль содержит зажимной элемент, выполненный с возможностью сужения зазора и зажима сенсорного модуля на удлиненной опоре.
23. Сенсорное устройство по п. 1, в котором отверстие сенсорного модуля круглое, а сенсорный модуль содержит кольцевую внутреннюю поверхность, проходящую вокруг круглого отверстия, причем кольцевая внутренняя поверхность выполнена с возможностью прижимания к цилиндрической внешней поверхности удлиненной опоры с сенсорным модулем, прикрепленным к удлиненной опоре.
24. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит индикатор.
25. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит датчик температуры.
26. Сенсорное устройство по п. 1, дополнительно содержащее процессор сенсорного модуля, функционально соединенный с датчиком и схемой связи, причем процессор выполнен с возможностью обеспечения передачи схемой связи данных, связанных по меньшей мере с одной характеристикой удлиненной опоры, на удаленный компьютер посредством узла связи.
27. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит C-образный корпус.
28. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит ленту для прикрепления сенсорного модуля к удлиненной опоре.
29. Сенсорное устройство по п. 1, в котором сенсорный модуль содержит микрофон.
30. Сенсорное устройство по п. 1, в котором схема связи выполнена с возможностью беспроводной передачи данных, связанных по меньшей мере с одной характеристикой удлиненной опоры, в узел связи посредством радиочастотной связи.
31. Способ мониторинга конвейерной ленточной системы, причем конвейерная ленточная система содержит конвейерную ленту и устройство очистки конвейерной ленты, имеющее чистящее лезвие, выполненное с возможностью зацепления конвейерной ленты, причем устройство очистки конвейерной ленты содержит удлиненную опору и пару креплений, поддерживающих удлиненную опору для прохождения поперек конвейерной ленты, причем способ предусматривает:
установку сенсорного модуля на удлиненную опору в то время, как удлиненная опора опирается на крепления и проходит поперек конвейерной ленты;
питание датчика и схемы связи сенсорного модуля от аккумулятора сенсорного модуля;
определение с использованием датчика сенсорного модуля, прикрепленного к удлиненной опоре, по меньшей мере одной характеристики удлиненной опоры; и
беспроводную передачу с использованием схемы связи сенсорного модуля, прикрепленного к удлиненной опоре, данных, связанных по меньшей мере с одной характеристикой удлиненной опоры, в узел связи.
32. Способ по п. 31, дополнительно предусматривающий использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы.
33. Способ по п. 32, в котором использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает прогнозирование по меньшей мере одного свойства чистящего лезвия.
34. Способ по п. 32, в котором использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает прогнозирование по меньшей мере одного свойства конвейерной ленты.
35. Способ по п. 32, в котором удлиненная опора содержит пару противоположных концов и ось, проходящую между ними; и
в котором установка сенсорного модуля на удлиненную опору предусматривает установку сенсорного модуля на одном из концов удлиненной опоры наружу в осевом направлении от одного из креплений или рядом с ним.
36. Способ по п. 32, дополнительно предусматривающий хранение исторических данных вибрации для удлиненной опоры второго устройства очистки конвейерной ленты второй конвейерной ленточной системы; и
при этом использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает сравнение по меньшей мере одной характеристики с историческими данными вибрации второй конвейерной ленточной системы.
37. Способ по п. 32, дополнительно предусматривающий хранение исторических данных вибрации для удлиненной опоры устройства очистки конвейерной ленты;
при этом использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает сравнение по меньшей мере одной характеристики с историческими данными вибрации.
38. Способ по п. 32, в котором использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает расчет основной частоты по меньшей мере одной характеристики удлиненной опоры и сопоставление основной частоты с по меньшей мере одним свойством конвейерной ленточной системы.
39. Способ по п. 32, в котором определение с использованием датчика сенсорного модуля по меньшей мере одной характеристики удлиненной опоры предусматривает определение ускорения удлиненной опоры, определение скорости вращения удлиненной опоры или их комбинацию; и
при этом использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает прогнозирование натяжения чистящего лезвия, сцеплено ли чистящее лезвие с конвейерной лентой, вибрирует ли чистящее лезвие или их комбинацию.
40. Способ по п. 32, дополнительно предусматривающий:
получение данных идентификации, представляющих по меньшей мере одно физическое свойство устройства очистки конвейерной ленты;
выбор по меньшей мере части алгоритма, представляющего устройство очистки конвейерной ленты, на основании идентификационных данных; и
при этом использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает определение по меньшей мере одного свойства, используя выбранную по меньшей мере часть алгоритма.
41. Способ по п. 32, в котором чистящее лезвие содержит множество чистящих лезвий и в котором использование по меньшей мере одной характеристики удлиненной опоры для прогнозирования по меньшей мере одного свойства конвейерной ленточной системы предусматривает прогнозирование по меньшей мере одного свойства каждого из лезвий.
42. Способ по п. 31, дополнительно предусматривающий передачу данных от узла связи на удаленный компьютер по сети.
43. Способ по п. 31, в котором обнаружение по меньшей мере одной характеристики удлиненной опоры предусматривает обнаружение по меньшей мере одной характеристики удлиненной опоры во время работы конвейерной ленты.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 5278620 A, 11.01.1994 | |||
| Токарный резец | 1924 |
|
SU2016A1 |

