ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе для переработки вида крупных десятиногих ракообразных, главным образом крабов и омаров. Более конкретно, настоящее изобретение относится к автоматизированному способу с сенсорным наведением и к системе для переработки таких ракообразных.
УРОВЕНЬ ТЕХНИКИ
Большие виды десятиногих ракообразных животных, таких как крабы, обычно перерабатывают из-за их высокоценного мяса. В этом отношении исторически их разделывали вручную, а затем с помощью гильотин или ножниц извлекали мясо и упаковывали его для отгрузки. Кроме того, крабы часто упаковывали в виде предварительно отваренных "кластеров", содержащих крабовые ноги, клешней и мяса плеч, которые затем в таком виде продавались для потребления. Независимо от формы конечного продукта, - поскольку ставки оплаты труда во многих азиатских странах чрезвычайно низки, ручная переработка со временем в значительной степени переместилась из североамериканских заводов на предприятия стран с низким уровнем заработной платы. Это привело к потере рабочих мест в бывших "горячих точках" по переработке крабов, таких как Ньюфаундленд в Канаде. Таким образом, для того чтобы обеспечить лучшую конкурентоспособность, переработчики крабов создали различные машины, способствующие автоматизации различных этапов процесса переработки. В результате в настоящее время крабовые кластеры обычно получают с использованием как ручных, так и полуавтоматических методов переработки крабов.
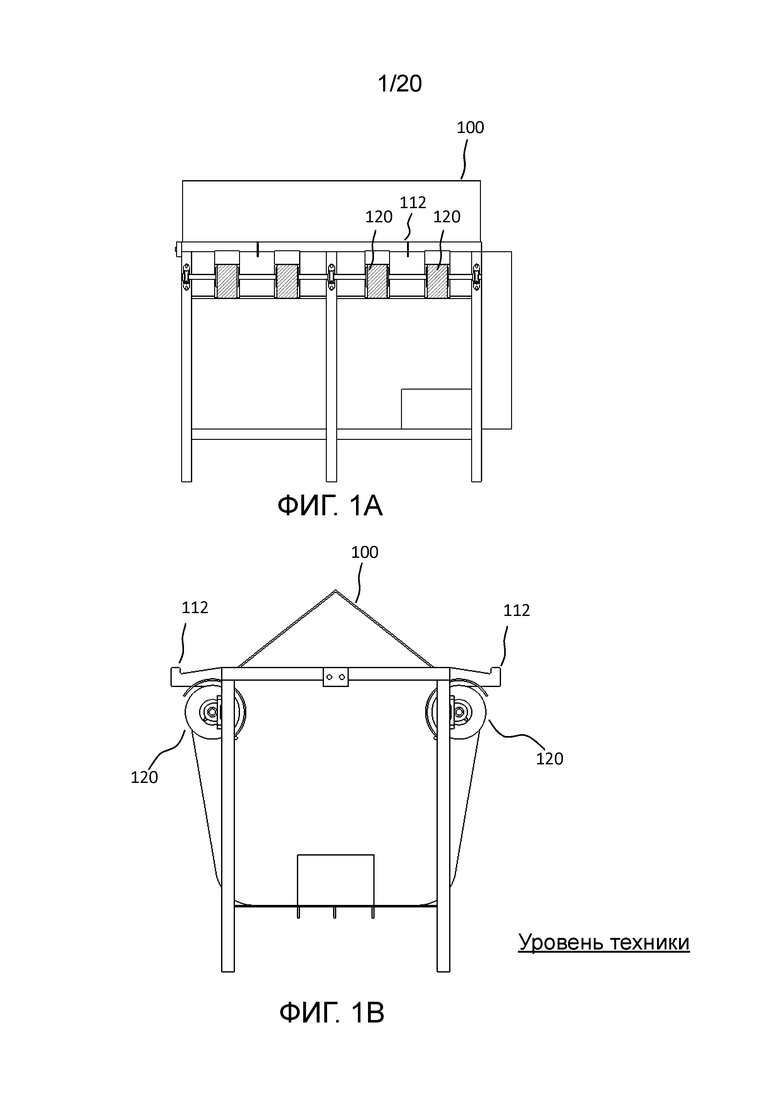
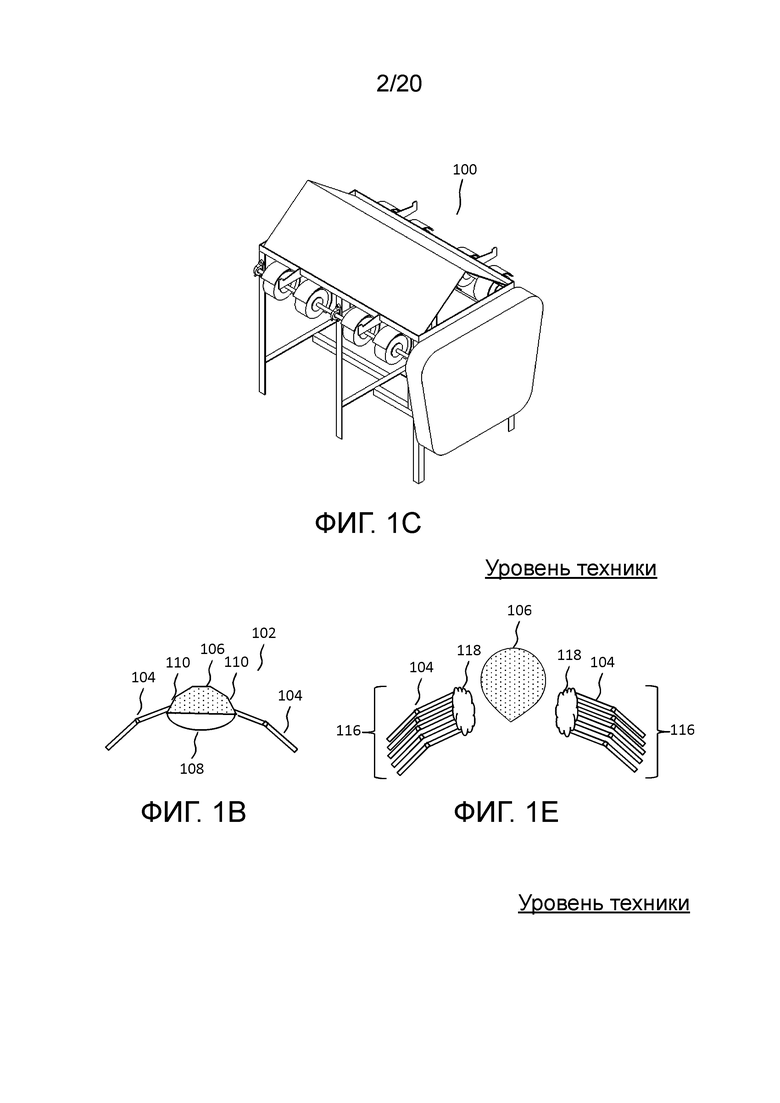
Обычный способ производства кластеров называется разделкой. При таком способе рабочий на разделочном столе одной из множества рабочих станций вручную разделывает живого краба и очищает его. На фигурах 1А и IB показаны упрощенные виды спереди и сбоку соответственно разделочного стола 100, который известен в данной области, а фигура 1С показывает схематичный вид в перспективе такого разделочного стола 100. С другой стороны, фигура 1D показывает схематичный вид спереди краба 102 перед разделкой. Для понимания описания, - краб 102 имеет "центральную часть корпуса", обычно содержащую панцирь или "колпак" 106 (защитная оболочка, расположенная сверху краба 102) и нижнюю сторону или "живот" 108 (который также является защитной оболочкой, но которая сама по себе не является такой же твердой или жесткой, как "колпак" 106), а также конечности 104, включая клешни, конечности клешней и плечи 110, расположенные над конечностями 104. Для того чтобы разделать краба 102, рабочий одной рукой берет краба 102 за его конечности рядом с каждым из плеч 110 краба, а затем укладывает краба 102 "животом" 108 на неподвижное подобное наковальне устройство 112 разделочного стола 100, как это показано на фигуре 1B, тем самым эффективно разделяя краба 102 пополам на два кластера. Одновременно от краба 102 отрывают "колпак" 106, и, как показано на фигуре 1E, при этом образуются два кластера 116 ног краба с прикрепленным к ним плечевым мясом 118. После этого плечевое мясо 118 каждого кластера 116 ног одновременно пододвигают к вращающейся щетке 120, расположенной с каждой стороны неподвижного подобного наковальне устройства 112, для того чтобы очистить каждый кластер 116 ног, например, удаляя кишечник и жабры (не показаны) краба 102. Полуавтоматический способ разделки крабов более подробно описан в патенте США №. 5.401.207 на имя Хикса (Hicks) и Терьена (Therien) компании Chungha Machinery Co., Ltd. (CHAMCO) из Кореи, производителя станка, который отделяет конечности от плеча краба с помощью вертикально вращающегося лезвия, которое делает слепой разрез в зависимости от того, куда эти конечности вручную помещены на конвейерную ленту (см., например, https://www.youtube.com/watch?v=KhHEwYKMtPc).
В настоящее время нет известной технологии, которая позволяла бы осуществлять разделку краба в полностью автоматическом режиме, как нет и ни одной системы, которая была бы достаточно изощренной, чтобы разделывать краба на множество различных частей (некоторые конкретные и неограничивающие примеры которых включают центральные части тела, кластеры ног, отдельно - плечевое мясо и отдельные ноги и клешни) без ручного вмешательства. Хотя, как обсуждалось выше, в настоящее время существует некая технология для полуавтоматического производства крабовых частей, эта технология не обладает гибкостью, позволяющей легко разделывать крабы на множество частей. Кроме того, существующие автоматизированные технологии не обладают точностью, необходимой для эффективного, точного и воспроизводимого создания высококачественных крабовых продуктов для их успешной коммерческой продажи. Именно по этой причине большинство основных продуктов крабов обрабатывают таким образом, который требует значительного количества ручного труда. Поэтому весьма необходима бóльшая и более точная автоматизация переработки крабов, особенно в тех областях, где заработная плата в местной крабовой промышленности не является конкурентоспособной среди азиатских стран с низким уровнем заработной платы.
Настоящее изобретение направлено на преодоление некоторых недостатков предшествующего уровня техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Поскольку крупные виды десятиногих ракообразных существ, в частности крабов и омаров, добывают из естественной среды, и они могут отличаться по размеру, общим анатомическим признакам, и по внешнему виду, то успешная коммерческая переработка таких ракообразных посредством автоматизированных средств достигается только с помощью системы, которая, как таковая, в своей автоматизации не является "застывшей", а наоборот, - является "гибкой", допускающей адаптацию по отношению к каждому обрабатываемому ракообразному. Настоящее изобретение обеспечивает автоматизированную систему с сенсорным наведением, которая выполнена с возможностью осуществлять интеллектуальную разделку ракообразных. Более конкретно, - настоящая система способна осуществлять эффективную разделку каждого отдельного ракообразного в ответ на то, как датчик(и) системы оценивает (оценивают) физические характеристики каждого ракообразного, когда он появляется на ремне конвейера. Кроме того, автоматизированная система с сенсорным наведением по настоящему изобретению способна в соответствии с управлением производить множество частей ракообразных, конкретные не ограничивающие примеры которых включают в себя части центрального корпуса, ноги, клешни, конечности, плечевое мясо, панцири, кластеры ног и любую их комбинацию.
Таким образом, в соответствии с одним вариантом осуществления настоящего изобретения обеспечена автоматизированная система с сенсорным наведением, которая выполнена с возможностью осуществлять интеллектуальную резку крупных десятиногих ракообразных на множество частей, при этом упомянутая система содержит (i) заборное устройство для приема ракообразного; (ii) систему позиционирования с сенсорным наведением для а) определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве; b) соединения с ракообразным и с) размещения ракообразного в удерживающей системе для удержания этого ракообразного в фиксированном положении, оптимальном для его последующей резки; (iii) систему разделки с сенсорным наведением для а) определения мест на ракообразном, подлежащих разрезу на основе желательного выхода частей ракообразного; и b) разрезания ракообразного в этих местах для получения оптимальных частей ракообразного; а также (iv) выдачное устройство для выпуска частей ракообразного из системы для последующей дополнительной переработки или упаковки. Заборное устройство может содержать ременную конвейерную систему, включающую в себя полупрозрачный конвейерный ремень, содержащую источник света, закрепленный в некотором месте под верхней внутренней поверхностью такого конвейерного ремня. Система позиционирования с сенсорным наведением содержит первую сенсорную камеру, связанную с программным обеспечением распознавания образов для определения присутствия, положения, ориентации и размера ракообразного и устройство перемещения с сенсорным наведением для соединения с этим ракообразным и размещения ракообразного в удерживающей системе для удержания этого ракообразного в фиксированном положении, оптимальном для его последующей резки. Удерживающая система содержит седловину, имеющую поверхность, которой придана форма, такая, чтобы соответствовать контуру общей поверхности панциря ракообразного для устойчивого позиционирования ракообразного в удерживающей системе; крепление, самая верхняя часть которого расположена ниже седловины, что позволяет конечностям ракообразного свисать с опорой по сторонам от центральной части корпуса ракообразного; и по меньшей мере один зажим, который способен эффектно удерживать ракообразного на месте с достаточным давлением во время резки без повреждения конечностей. Зажиму придана форма усеченного конуса, напоминающая перевернутый конус, имеющий отрезанной свою самую верхнюю часть, обеспечивающую отверстие вокруг периферии седловины, и он, предпочтительно, не соединен с седловиной, разрешая по отношению к нему свободное передвижение седловины. Зажим(ы) имеет (имеют) участок, который касается конечностей ракообразного, и которому придана форма, соответствующая внешней поверхности зажима. Система разделки с сенсорным наведением содержит вторую сенсорную камеру, связанную с программным обеспечением распознавания образов для определения мест на ракообразном, предназначенных для резки на основе желательного выхода частей ракообразного, наводимое датчиком режущее устройство для разрезки ракообразного в определенных местах для получения оптимальных частей ракообразного, и разделочную штангу, которая наделена способностью эффективного разделения центрального участка корпуса ракообразного на две части.
В другом варианте осуществления настоящего изобретения обеспечена автоматизированная система с сенсорным наведением, которая выполнена с возможностью интеллектуального разреза крупного вида десятиногого ракообразного на множество частей, при этом упомянутая система содержит заборное устройство для приема ракообразного; удерживающую систему для удержания ракообразного в оптимальном фиксированном при разделке ракообразного; систему позиционирования с сенсорным наведением, имеющую первый датчик для определения присутствия ракообразного в заборном устройстве, связанное с первым датчиком программное обеспечение распознавания образов для определения положения, ориентации и размера ракообразного на заборном устройстве, и устройство перемещения с сенсорным наведением для перемещения ракообразного от заборного устройства к удерживающей системе; систему разделки с сенсорным наведением, имеющую второй датчик для определения ракообразного в удерживающей системе, связанное со вторым датчиком программное обеспечение распознавания образов для определения положения, ориентации и размера ракообразного на удерживающей системе и для определения на ракообразном множества мест для резки ракообразного, при этом эти места зависят от определенного положения, ориентации и размера ракообразного, наводимое датчиком режущее устройство для разрезки ракообразного во множестве мест для получения множества частей ракообразного, а также выдачное устройство для приема множества частей ракообразного из удерживающей системы после того, как это ракообразное было разрезано на множества частей ракообразного для последующей упаковки. Заборное устройство может содержать систему ременного конвейера и получает ракообразное "животом вверх", таким образом, что при этом ракообразное уложено на ленточный конвейер панцирем. Под системой ременного конвейера может быть расположен источник света для освещения области непосредственно вокруг ракообразного с целью создания силуэта ракообразного, когда этот ракообразный находится в поле зрения первого датчика. Первый датчик содержит первую сенсорную камеру, имеющую поле зрения, охватывающее участок системы ременного конвейера, предназначенную для получения изображений ракообразного. Программное обеспечение распознавания образов обрабатывает изображения ракообразного и генерирует данные изображений этого ракообразного, содержащие положение, ориентацию и размеры ракообразного. Устройство перемещения с сенсорным наведением содержит роботизированную руку, имеющую прикрепленное к ней соединительное устройство, предпочтительно, вакуумный захват для разъемного соединения с ракообразным для переноса этого ракообразного от заборного устройства на удерживающую систему. Удерживающая система содержит седловину, имеющую поверхность, профилированную для сопряжения с центральным участком корпуса ракообразного; крепление для поддержки конечностей ракообразного; и один или более зажимов для удержания ракообразного в фиксированном положении прижимом конечностей ракообразного к креплению. Поверхность седловины профилирована для сопряжения с центральным участком корпуса ракообразного по панцирю этого ракообразного. Зажим имеет форму, подобную усеченному конусу, с верхним отверстием и с нижним отверстием, при этом, когда седловина находится в положении "вверху", верхнее отверстие расположено вблизи нижней стороны седловины. Седловина может содержать шарнирную опору для перемещения седловины между положением "вверху" и положением "внизу", в котором эта седловина расположена ниже нижнего отверстия крепление. Автоматизированная система может иметь разделочную штангу, которая может перемещаться через центральную часть корпуса ракообразного, когда это ракообразное сопряжено с поверхностью седловины, для разделения центральной части корпуса ракообразного на две части и для удаления панциря с тела этого ракообразного. Второй датчик содержит вторую камеру для получения изображений ракообразного, когда это ракообразное сопряжено с поверхностью седловины. Связанное со вторым датчиком программное обеспечение распознавания образов обрабатывает изображения ракообразного и генерирует данные изображений этого ракообразного. Наводимое датчиком режущее устройство содержит робот, имеющий режущий инструмент. Этот режущий инструмент представляет собой вращающееся лезвие, имеющее 6 степеней свободы для резки ракообразного.
В еще одном варианте осуществления настоящего изобретения обеспечен автоматизированный способ коммерческой разделки ракообразного, включающий в себя прием ракообразного на заборное устройство; определение присутствия ракообразного на заборном устройстве посредством первого датчика; определение данных о положении, ориентации и размере ракообразного на заборном устройстве посредством первого датчика вместе с программным обеспечением распознавания образов и передача упомянутых данных на устройство перемещения; совмещение ракообразного с устройством перемещения и перемещение ракообразного от заборного устройства посредством упомянутого устройства перемещения к удерживающей системе; удержание ракообразного в фиксированном положении в удерживающей системе для последующей разделки; обнаружение и определение положения, ориентации и размера ракообразного в удерживающей системе с помощью второго датчика вместе с программным обеспечением распознавания образов; генерацию параметров разрезов на основе положения, ориентации и размера ракообразного в удерживающей системе, как это определено посредством второго датчика вместе с программным обеспечением распознавания образов, включающих в себя множество оптимальных мест на ракообразном, предназначенных для резки для образования по желанию множества частей ракообразных; передачу параметров разрезов на режущий инструмент и резку ракообразного по одному или более местам из множества оптимальных мест для образования по желанию множества частей ракообразных; освобождение частей ракообразного из удерживающей системы.
В еще одном варианте осуществления настоящего изобретения обеспечена автоматизированная система с сенсорным наведением, которая способна осуществлять разрезку крупных десятиногих ракообразных на множество частей, при этом упомянутая система содержит (i) заборное устройство для приема ракообразного; (ii) систему позиционирования с сенсорным наведением для а) определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве; b) определения на ракообразном мест, предназначенный для разреза на основе желательного выхода частей ракообразного; с) соединения с ракообразным; и d) размещения ракообразного в удерживающей системе для удержания этого ракообразного в фиксированном положении, оптимальном для его последующей резки; (iii) систему разделки с сенсорным наведением для разрезания ракообразного в этих местах для получения оптимальных крабовых частей ракообразного; а также (iv) выдачное устройство для выпуска частей ракообразного из системы для дальнейшей дополнительной переработки или для упаковки. Заборное устройство может содержать ременную конвейерную систему. Система позиционирования с сенсорным наведением содержит сенсорную камеру, связанную с программным обеспечением распознавания образов для определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве, а также мест на этом ракообразном, подлежащих разрезу на основе желательного выхода частей ракообразного; и устройство перемещения с сенсорным наведением для соединения с этим ракообразным и размещения ракообразного в удерживающей системе для удержания этого ракообразного в фиксированном положении, оптимальном для его последующей резки. Удерживающая системе содержит седловину, имеющую поверхность, которой придана форма, такая, чтобы соответствовать контуру общей поверхности панциря ракообразного для устойчивого позиционирования ракообразного в удерживающей системе, крепление, самая верхняя часть которого расположена ниже седловины, что позволяет конечностям ракообразного свисать с опорой по сторонам от центральной части корпуса ракообразного; и по меньшей мере один зажим, который способен эффектно удерживать ракообразного на месте с достаточным давлением во время резки без повреждения конечностей. Зажиму придана форма усеченного конуса, напоминающая перевернутый конус с отрезанной самой верхней частью, обеспечивающая отверстие вокруг периферии седловины, и он не соединен с седловиной, разрешая по отношению к нему свободное передвижение седловины. Зажим(ы) имеет (имеют) участок, который касается конечностей ракообразного, и которому придана форма, соответствующая внешней поверхности зажима. Система разделки с сенсорным наведением содержит наводимое датчиком режущее устройство для разрезки ракообразного в определенных местах для получения оптимальных частей ракообразного, и разделочную штангу, которая наделена способностью эффективного разделения центрального участка тела ракообразного на две части. Выдачное устройство содержит систему ременного транспортера.
В еще одном варианте осуществления настоящего изобретения обеспечена удерживающая система для использования в автоматизированная система с сенсорным наведением, которая выполнена с возможностью интеллектуального разреза десятиногого ракообразного крупного вида на множество частей, при этом упомянутая удерживающая система содержит седловину, имеющую поверхность, которой придана форма, такая, чтобы соответствовать контуру общей поверхности панциря ракообразного для устойчивого позиционирования ракообразного в удерживающей системе до разреза упомянутого ракообразного на множество частей. Удерживающая система может дополнительно содержать крепление, самая верхняя часть которого расположена ниже седловины, что позволяет конечностям ракообразного свисать с опорой по сторонам от центральной части корпуса ракообразного. Кроме того, удерживающая система может дополнительно содержать по меньшей мере один зажим, который способен эффектно удерживать ракообразного на месте с достаточным давлением во время резки без повреждения конечностей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь в качестве примера будут описаны различные варианты осуществления настоящего изобретения, со ссылкой на прилагаемые чертежи, на которых:
фигура 1A представляет собой схематичный вид спереди разделочного стола предшествующего уровня техники;
фигура 1В представляет собой схематичный вид сбоку разделочного стола предшествующего уровня техники;
фигура 1С представляет собой схематичный вид в перспективе разделочного стола предшествующего уровня техники;
фигура 1D представляет собой схематичный вид краба спереди;
фигура 1Е представляет собой схематичный вид сверху частей крабов после разделки;
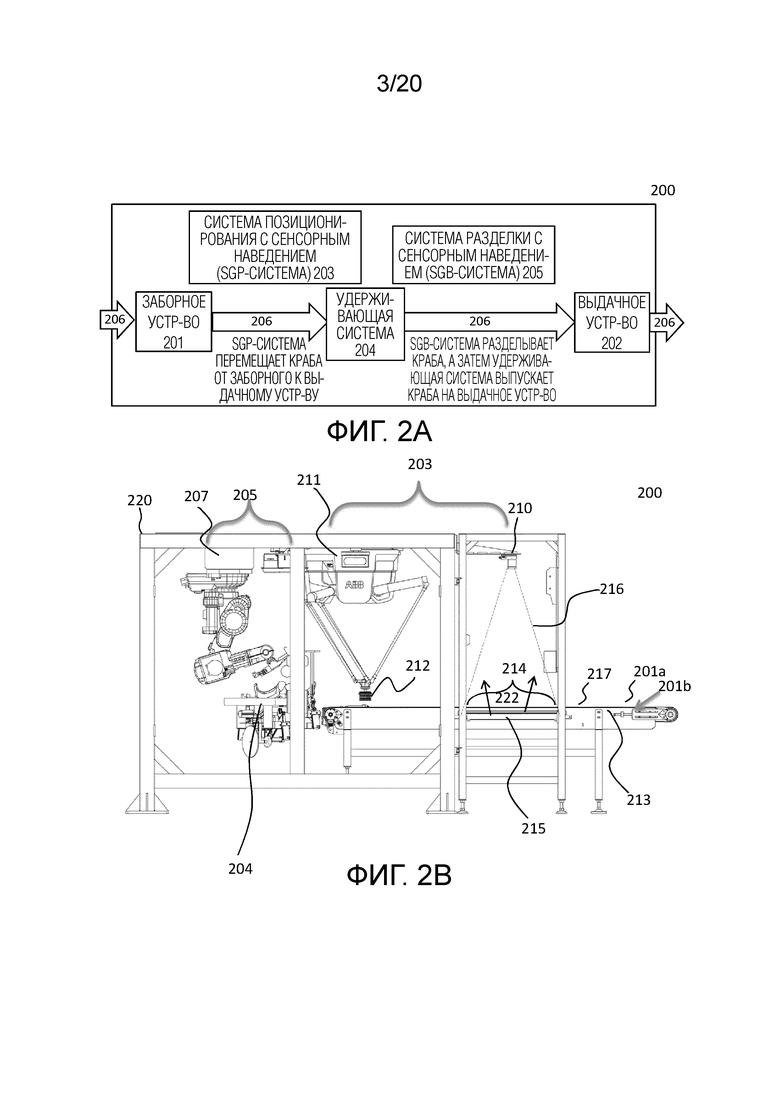
фигура 2А представляет собой упрощенную функциональную блок-схему высокого уровня варианта осуществления системы с сенсорным наведением в соответствии с предпочтительным вариантом осуществления изобретения;
фигура 2В представляет собой схематичный вид сбоку примерного варианта осуществления чувствительной системы с сенсорным наведением по настоящему изобретению;
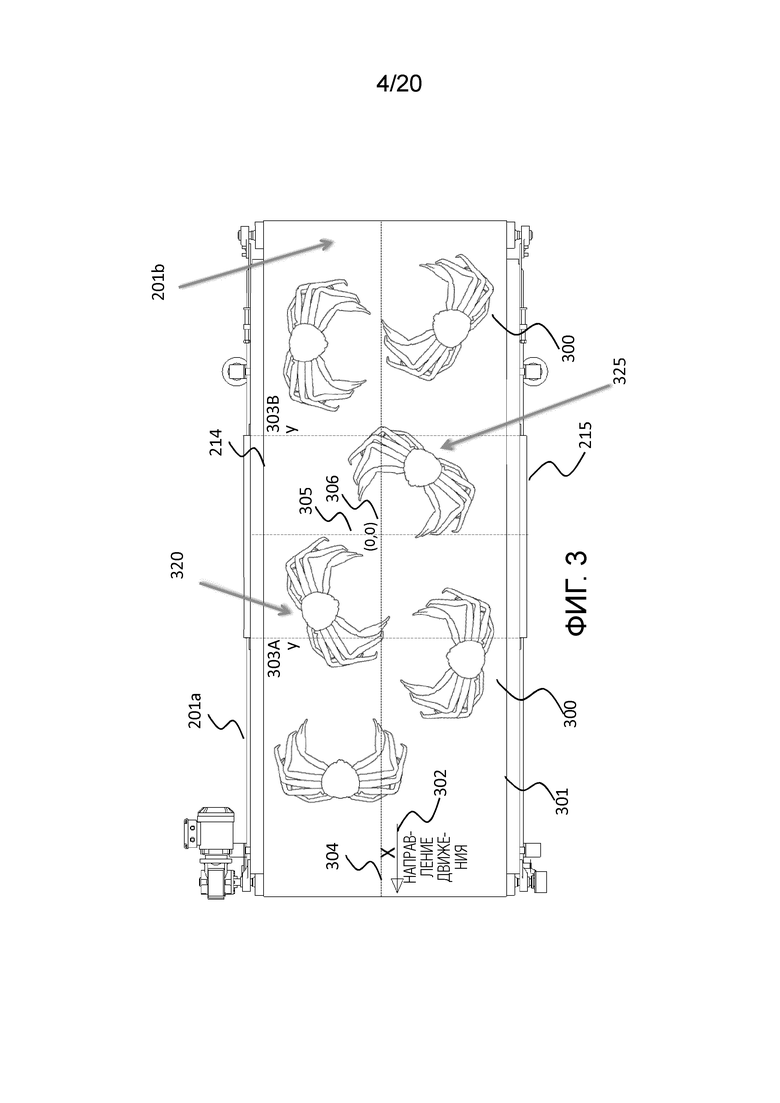
фигура 3 представляет собой схематичный вид сверху заборного устройства в соответствии с вариантом осуществления изобретения;
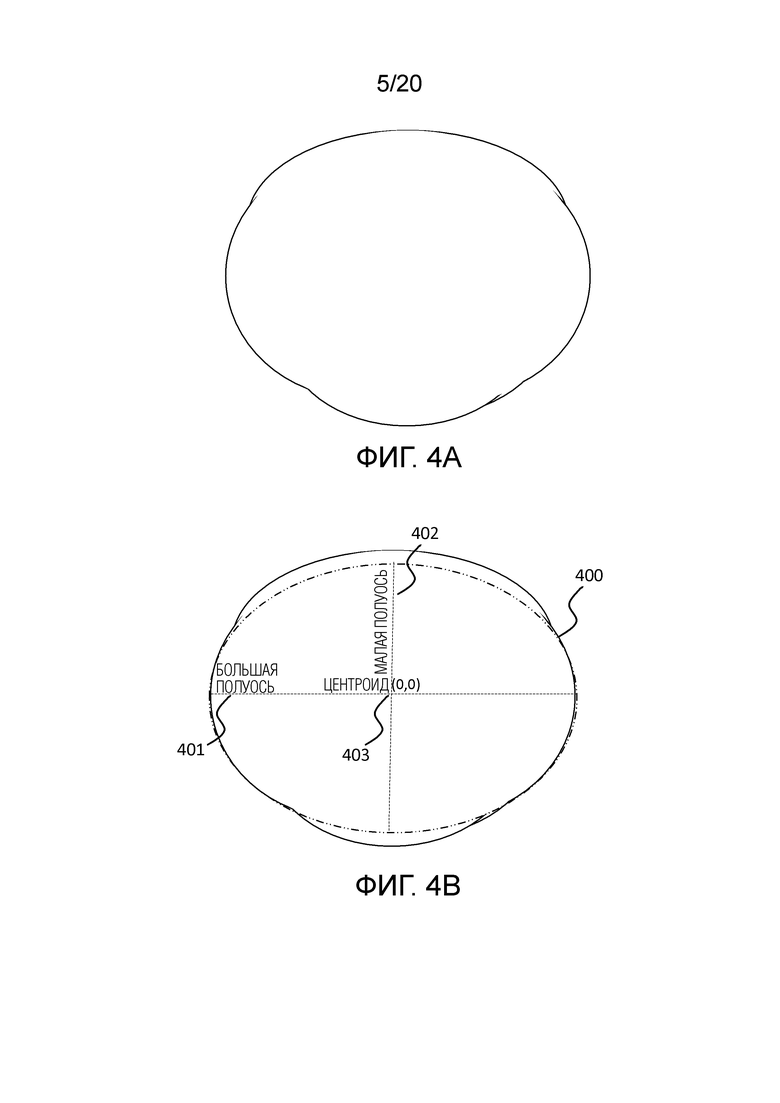
фигура 4А представляет собой схематичный вид сверху опорной модели, используемой программным обеспечением распознавания;
фигура 4B представляет собой упрощенную схему вида сверху эллипса, наложенного поверх опорной модели;
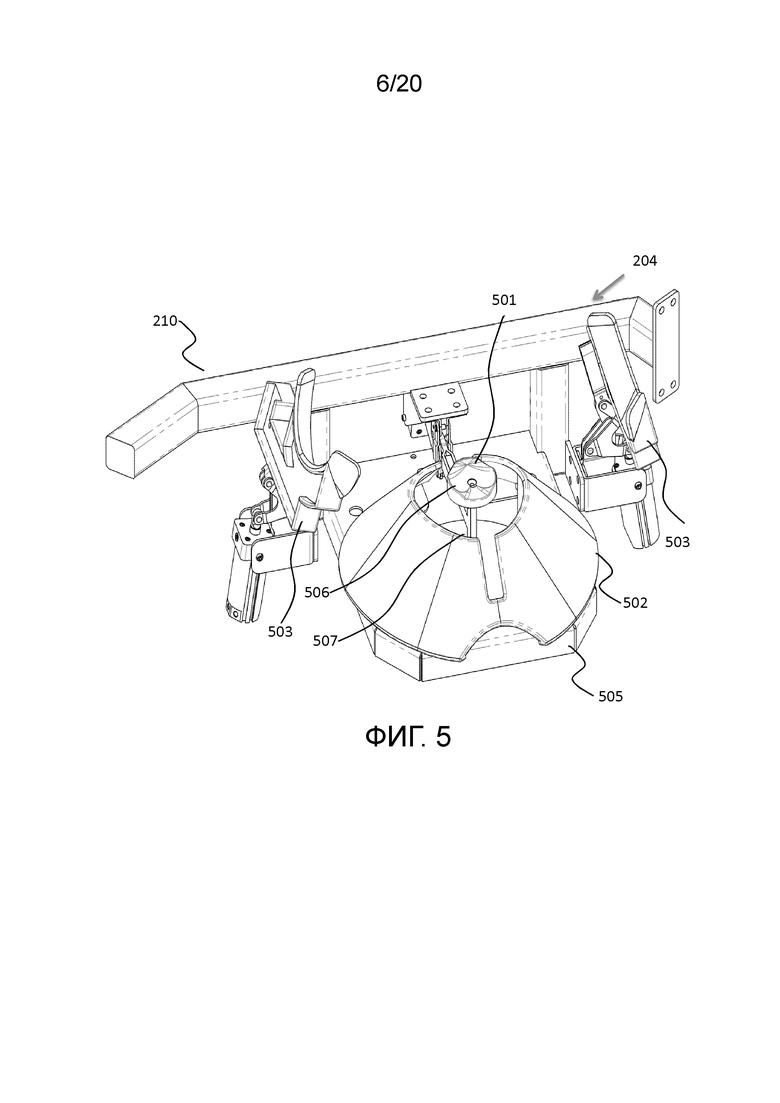
фигура 5 представляет собой схематичный вид в перспективе удерживающей системы в соответствии с вариантом осуществления изобретения;
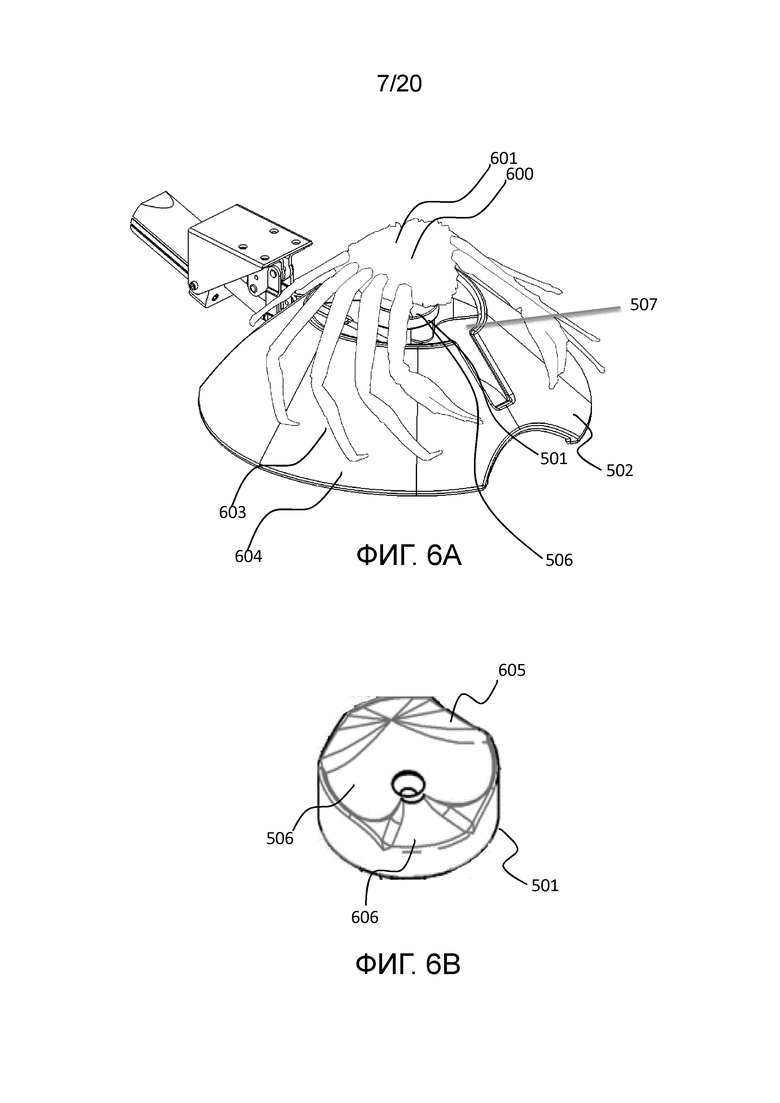
фигура 6А представляет собой схематичный вид спереди крепления, опоры седловины и седловины с наложенным на нее крабом "животом вверх";
фигура 6В представляет собой схематичный увеличенный вид седловины и ее контурной поверхности;
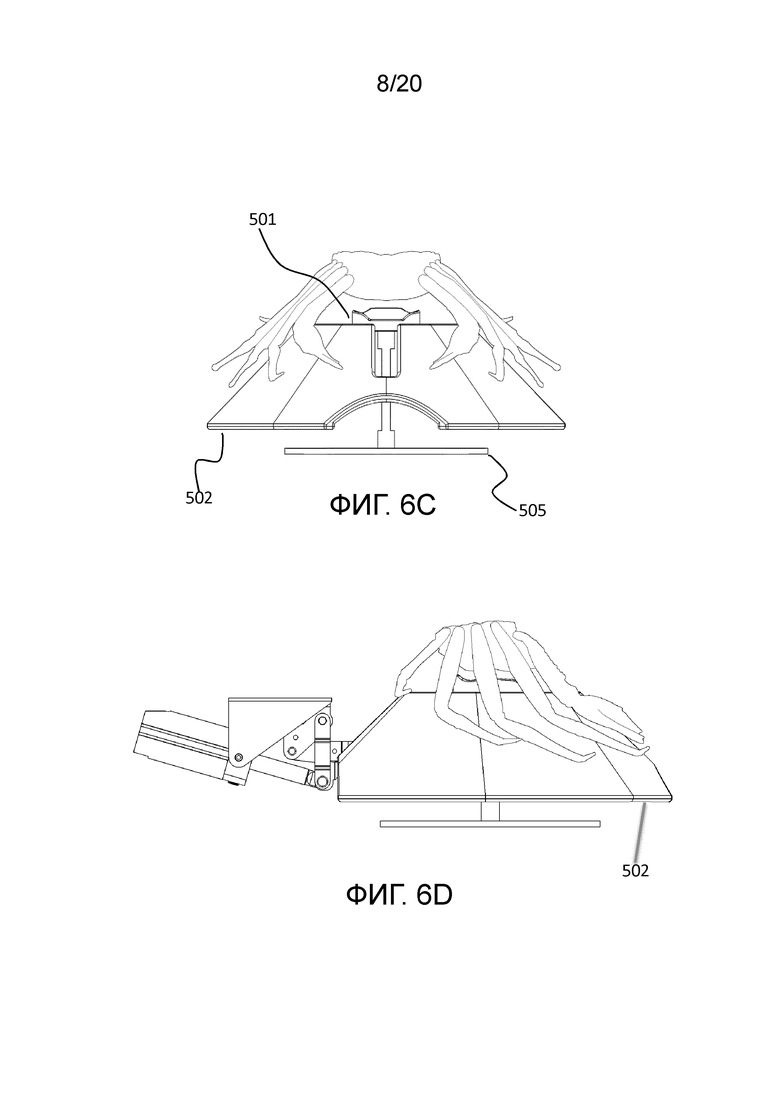
фигура 6С представляет собой схематичный вид спереди крепления, опоры седловины и седловины с крабом "животом вверх", показанным здесь немного выше ее;
фигура 6D представляет собой схематичный вид сбоку крепления, опоры седловины и седловины с крабом "животом вверх", показанным здесь немного выше ее;
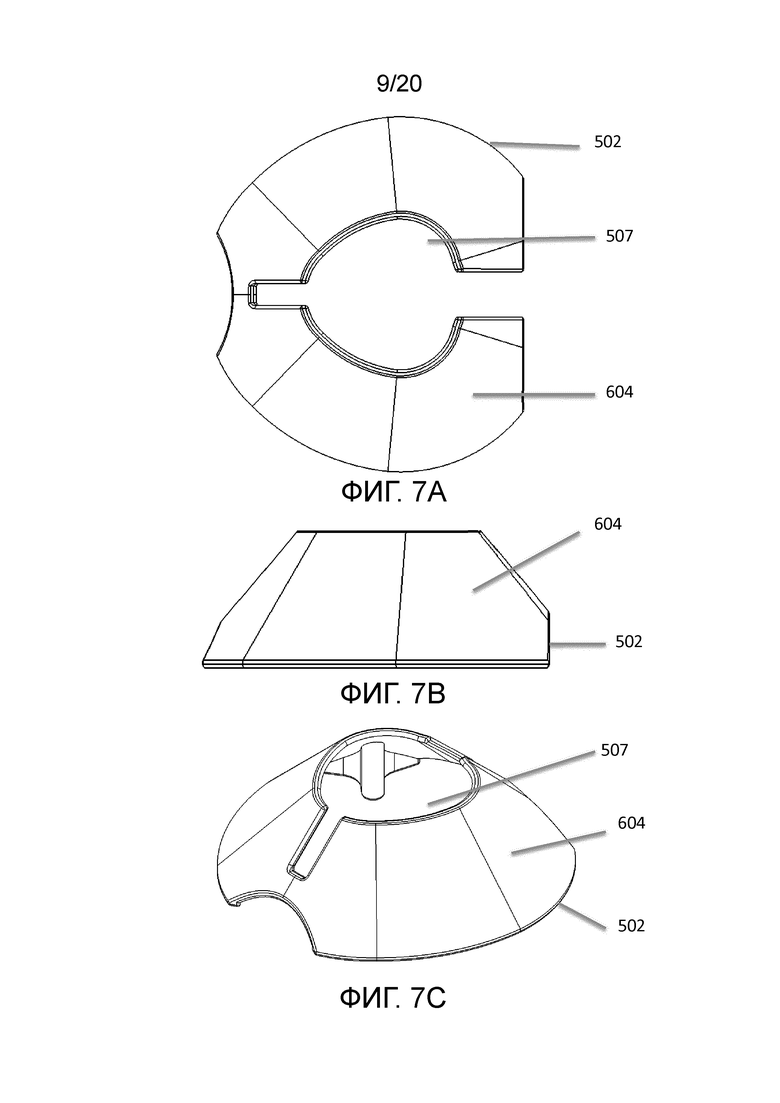
фигура 7А представляет собой схематичный вид сверху крепления в соответствии с вариантом осуществления изобретения;
фигура 7В представляет собой схематичный вид сбоку крепления в соответствии с вариантом осуществления изобретения;
фигура 7С представляет собой схематичный вид сбоку в перспективе крепления в соответствии с вариантом осуществления изобретения;
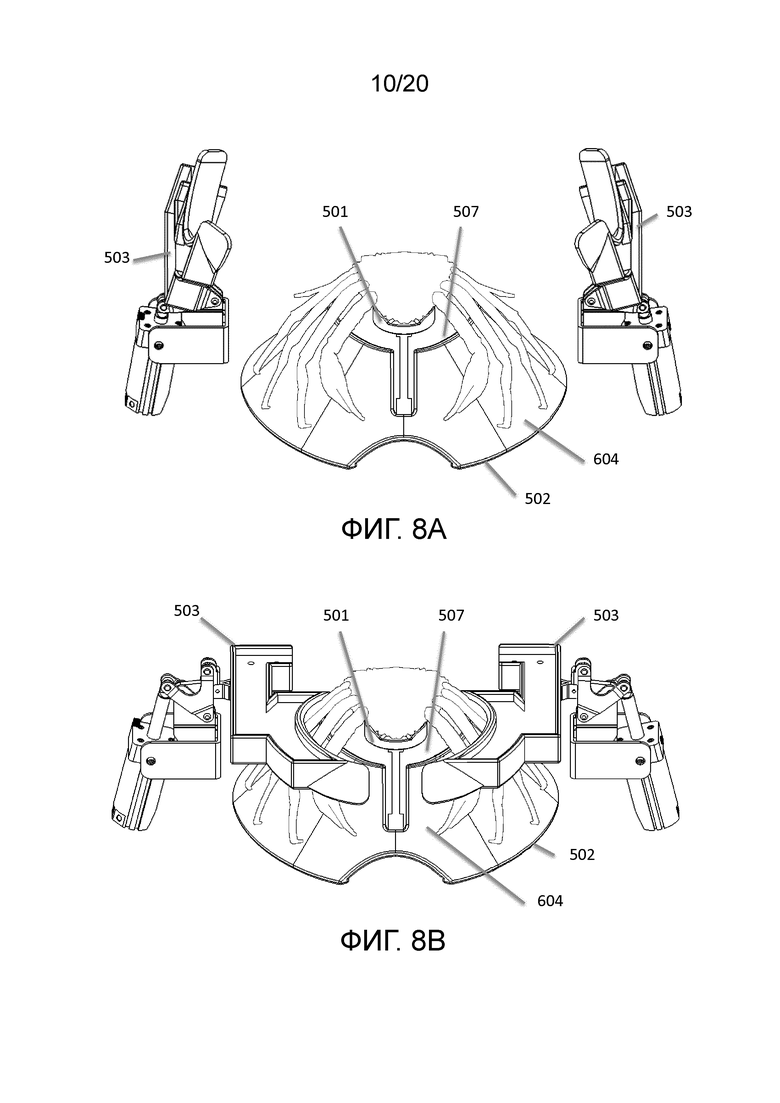
фигура 8А представляет собой схематичный вид спереди краба на седловине и в креплении с прижимами в положении "открыто";
фигура 8В представляет собой схематичный вид спереди краба на седловине и в креплении с прижимами в положении "закрыто";
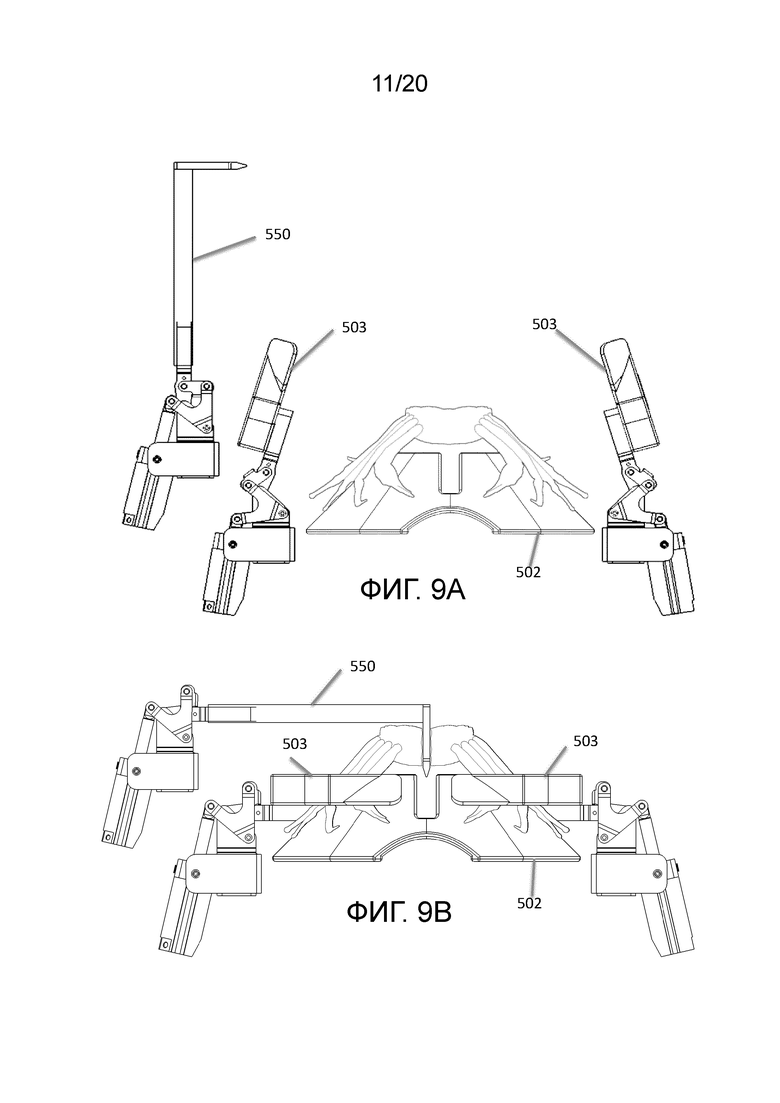
фигура 9А представляет собой схематичный вид спереди краба на седловине и в креплении с прижимами в положении "открыто", а разделочной штангой - в положении "вверх";
фигура 9В представляет собой схематичный вид спереди краба на седловине и в креплении с прижимами в положении "открыто", а разделочной штангой - в положении "вниз";
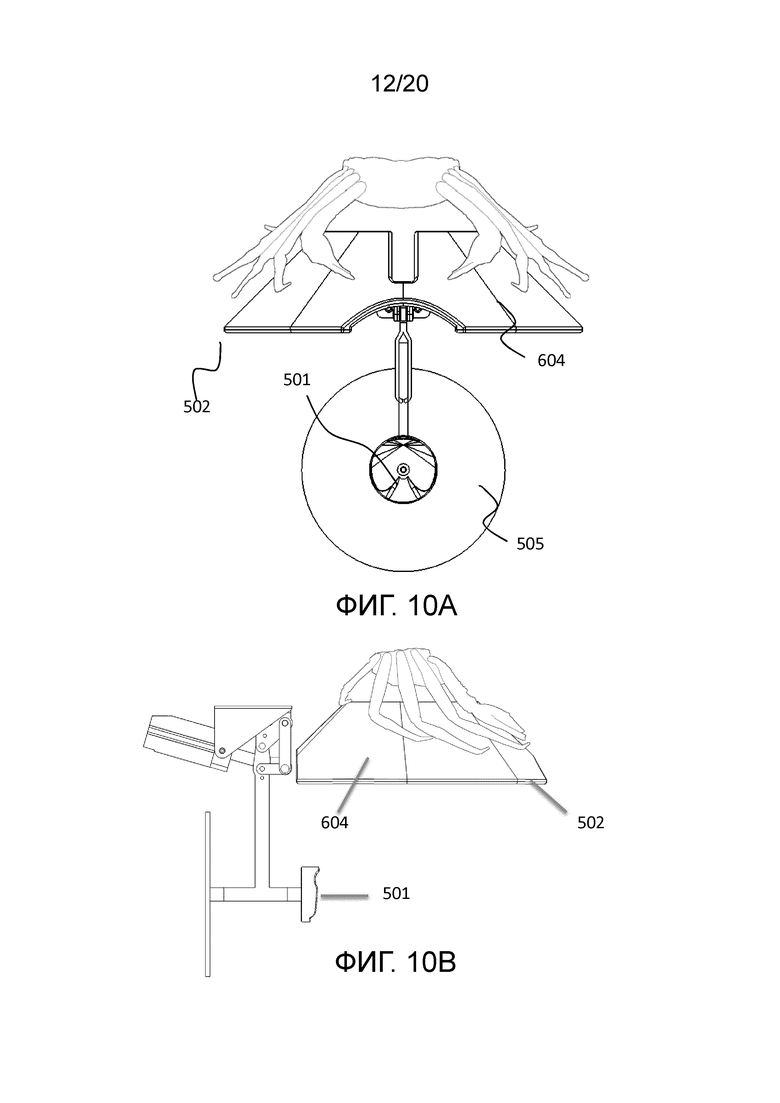
фигура 10А представляет собой схематичный вид спереди краба над креплением, при этом седловина и опора седловины находятся в положении "вниз";
фигура 10В представляет собой схематичный вид сбоку краба над креплением, при этом седловина и опора седловины находятся в положении "вниз";
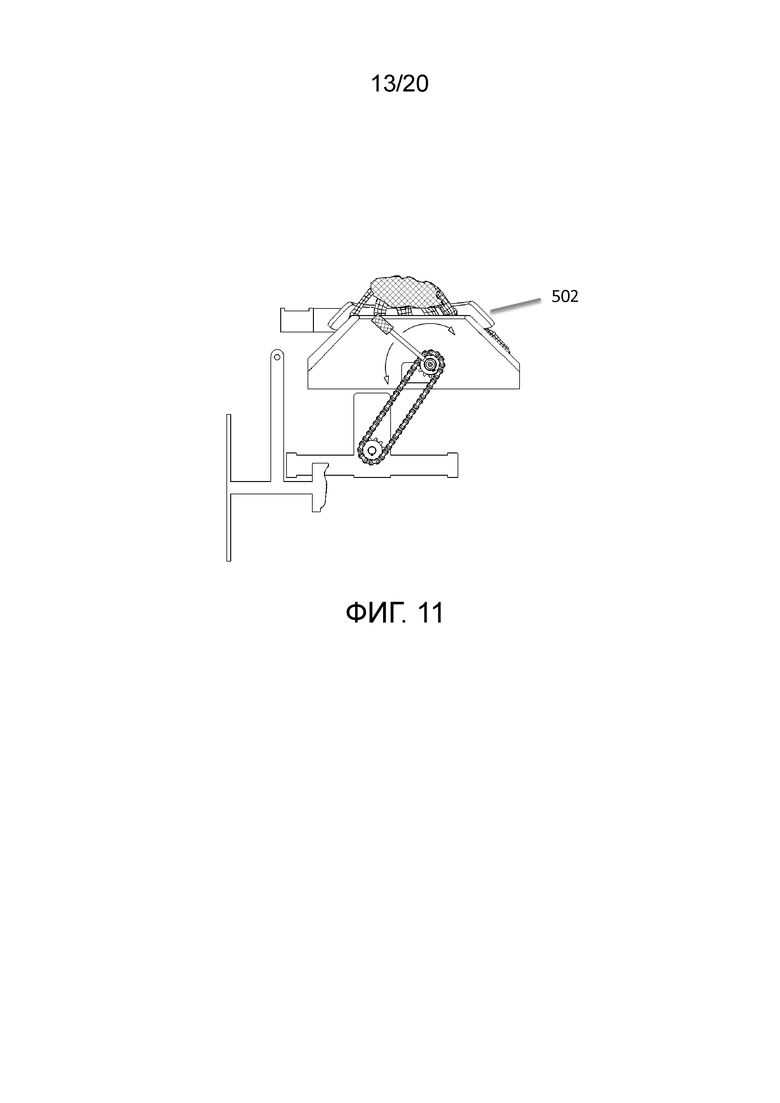
фигура 11 представляет собой схематичный вид сбоку краба на седловине, крепления и щеточного механизма;
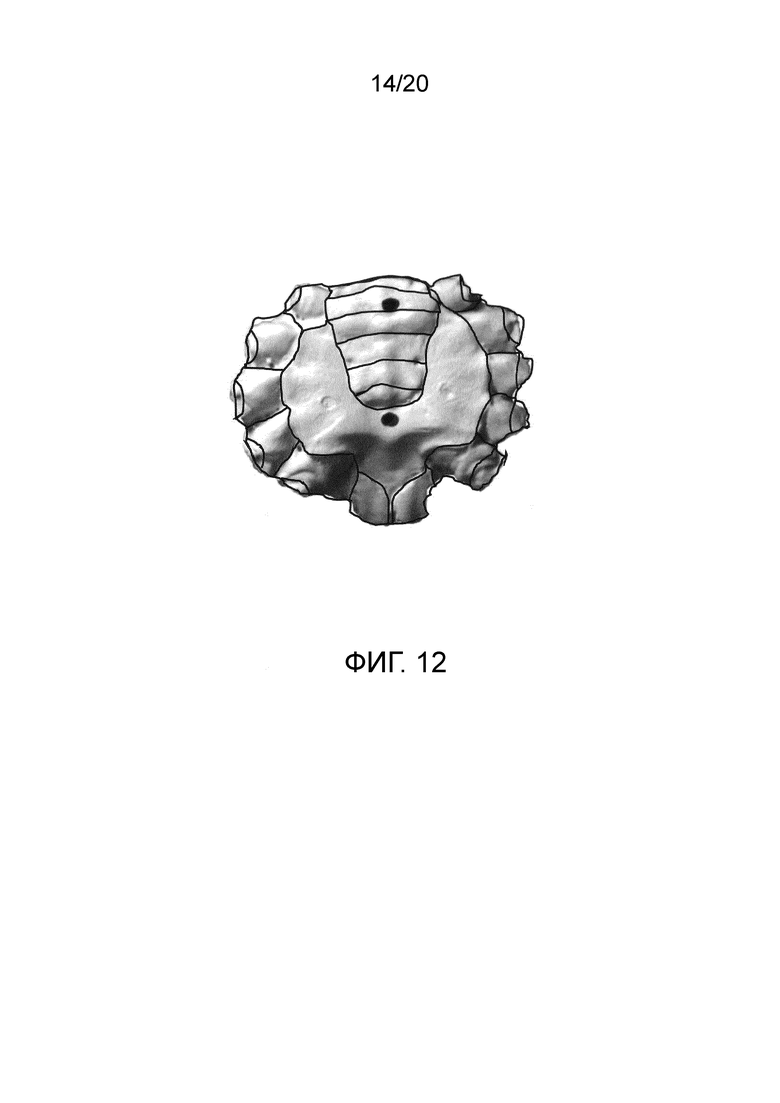
фигура 12 представляет собой вид сверху отсканированного изображения "живота" краба без конечностей, наложенного на его видимые контуры, которые пригодны для определения посредством программного обеспечения распознавания образов;
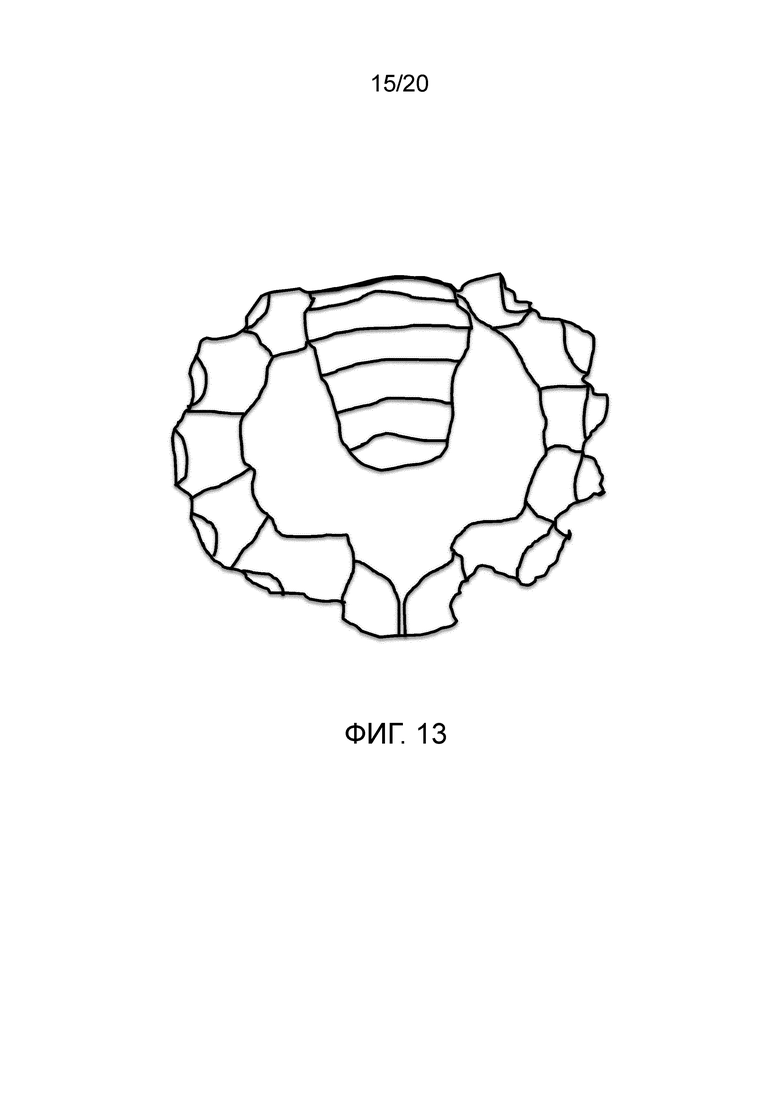
фигура 13 представляет собой вид сверху видимых контуров "живота" краба по фигуре 12, которые пригодны для определения посредством программного обеспечения распознавания образов;
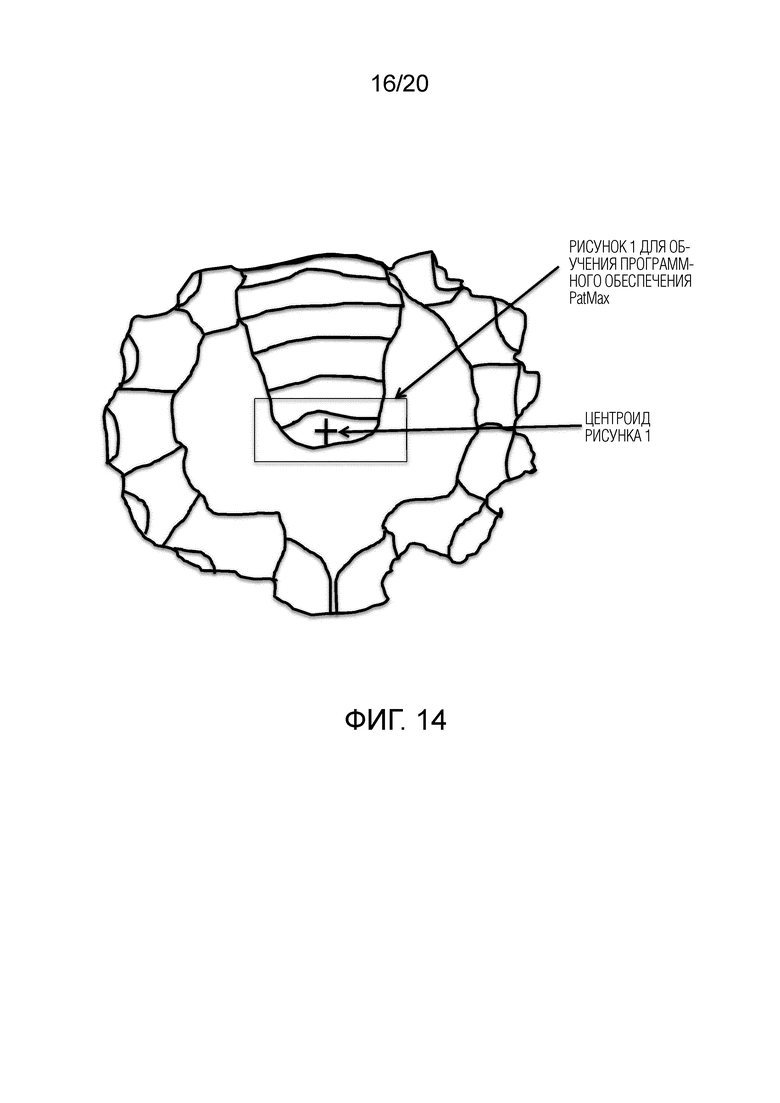
фигура 14 представляет собой вид сверху видимых контуров "живота" краба по фигуре 13, которые пригодны для определения посредством программного обеспечения распознавания образов, с ограничивающей рамкой, используемой для обучения программного обеспечения нахождению центроида краба;
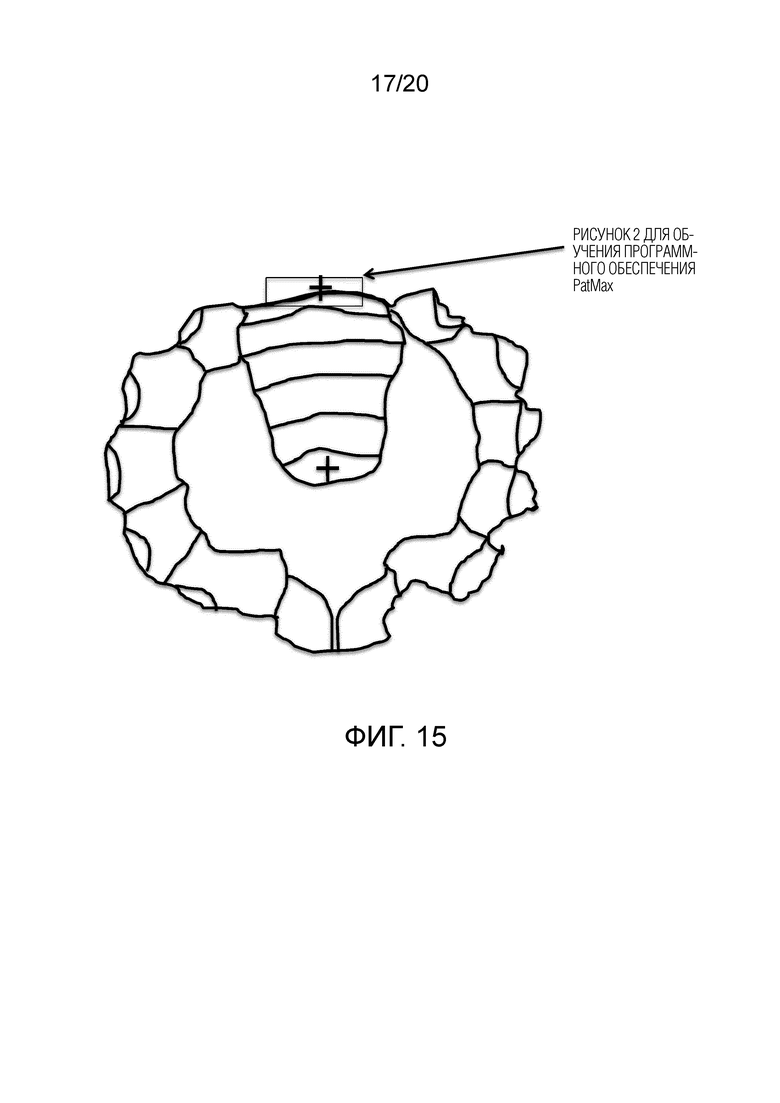
фигура 15 представляет собой вид сверху видимых контуров "живота" краба по фигуре 13, которые пригодны для определения посредством программного обеспечения распознавания образов, с ограничивающей рамкой, используемой для обучения программного обеспечения нахождению видимого края краба;
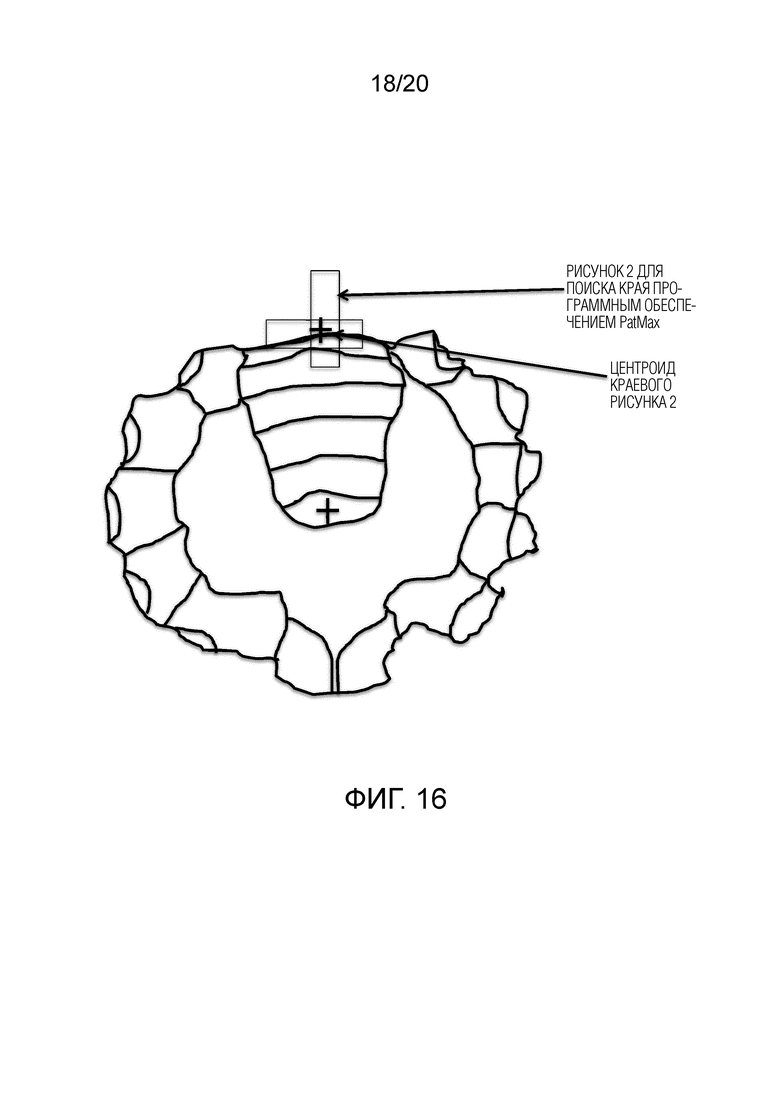
фигура 16 представляет собой вид сверху видимых контуров "живота" краба по фигуре 13, которые пригодны для определения посредством программного обеспечения распознавания образов, с ограничивающими рамками, используемыми для обучения программного обеспечения нахождению центроида видимого края краба;
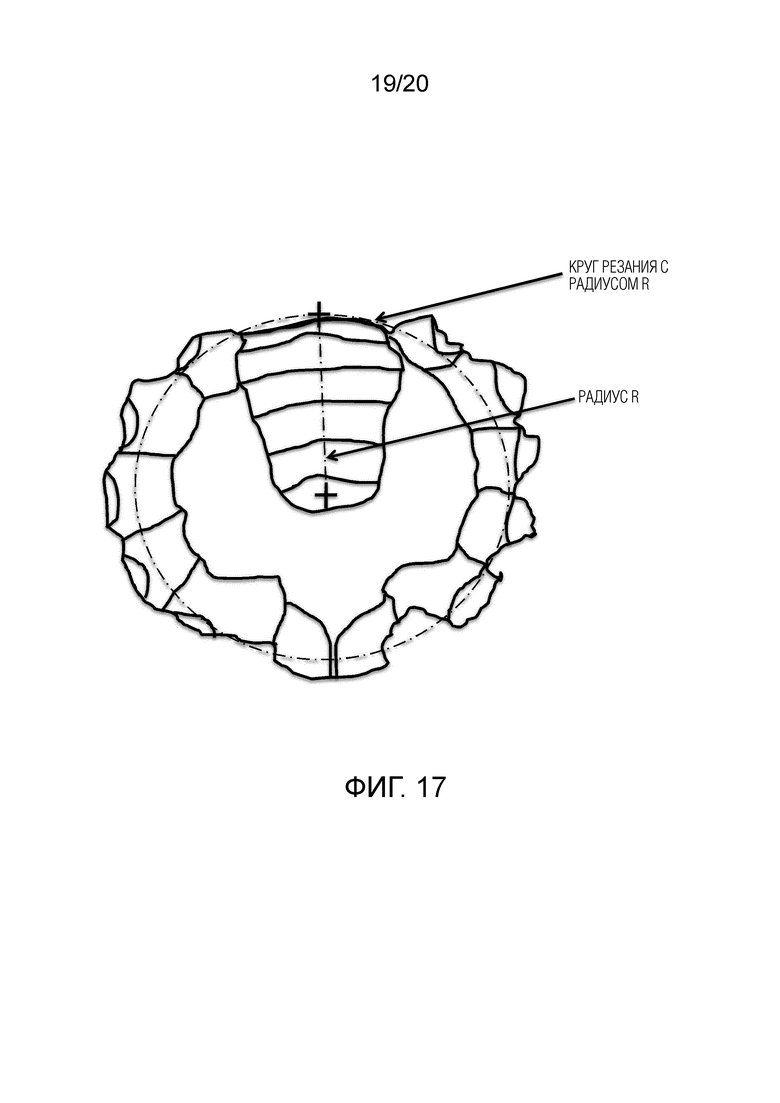
фигура 17 представляет собой вид сверху видимых контуров "живота" краба по фигуре 13, которые пригодны для определения посредством программного обеспечения распознавания образов, с кругом резания размещенным на нем, исходя из радиуса между центроидами; а также
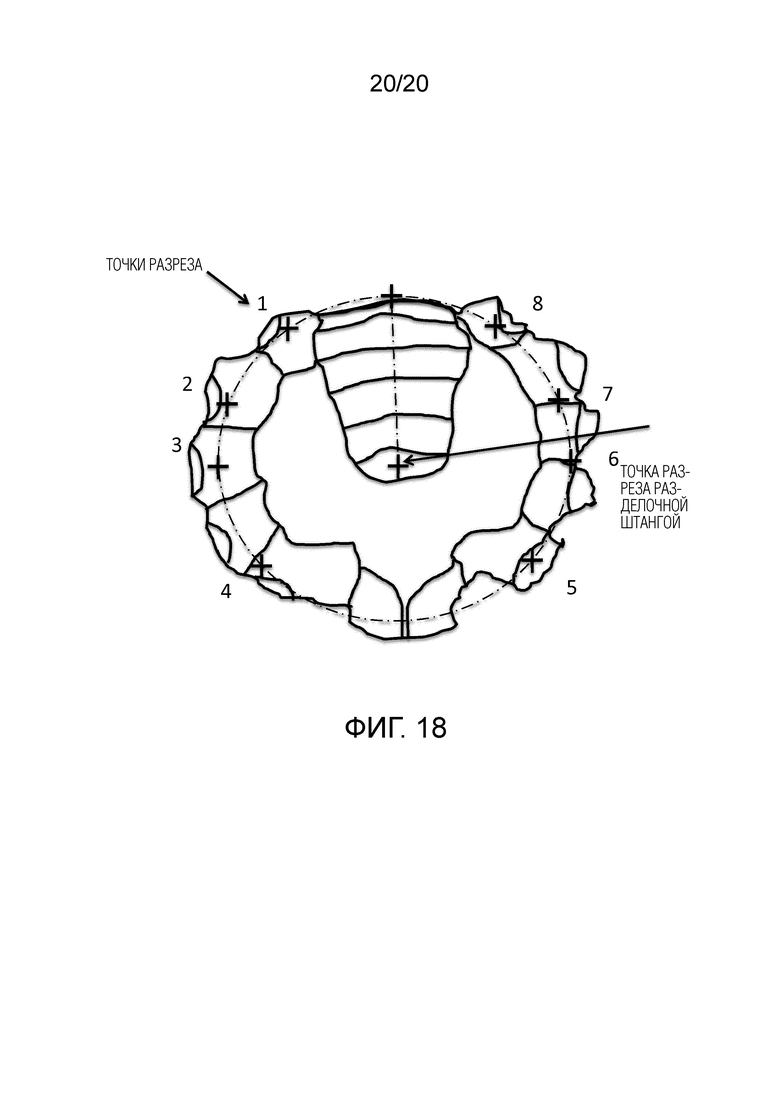
фигура 18 представляет собой вид сверху видимых контуров "живота" краба по фигуре 13, которые пригодны для определения посредством программного обеспечения распознавания образов, с указанными на нем 8 потенциальными местами резки.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание представлено для того, чтобы специалисту в данной области техники дать возможность осуществить и использовать настоящее изобретение, каковое описание обеспечено в контексте конкретной патентной заявки и ее требований. Для специалистов в данной области техники будут очевидны различные модификации раскрытых здесь вариантов осуществления, а общие принципы, определенные здесь, могут быть применены к другим вариантам осуществления и приложениям без выхода за рамки объема изобретения. Таким образом, настоящее изобретение не ограничивается раскрытыми вариантами осуществления, а предоставляется самым широким образом согласующимся с раскрытыми здесь принципами и особенностями.
Показанное на фигуре 2А представляет собой схематичную функциональную блок-схему высокого уровня варианта осуществления системы 200 с сенсорным наведением для переработки крабов в соответствии с настоящим изобретением. Когда в данном тексте используется термин "краб", то обычно имеется в виду, что речь идет также и о других видах крупных десятиногих ракообразных существ, таких как омары. Стрелки 206 на фигуре 2А показывают направление движения краба при его переработке. Система 200 обычно содержит:
(i) заборное устройство 201 для приема краба;
(ii) систему 203 позиционирования с сенсорным наведением (система "SGP") для определения присутствия, положения, ориентации и размера краба на заборном устройстве 201 (и, как вариант, - мест на корпусе краба, подлежащие разрезу на основе желательного выхода крабовых частей), соединения c крабом и размещения краба в удерживающей системе 204 для его разделки;
(iii) удерживающую систему 204 для удержания краба в фиксированном положении, оптимальном для его разделки;
(iv) систему 205 разделки с сенсорным наведением (система "SGВ") для возможного определения мест на корпусе краба, подлежащих разрезу на основе желательного выхода крабовых частей (если это не предусмотрено в системе SGP); и разрезания краба в выбранных местах для получения оптимальных крабовых продуктов; а также
(v) выдачное устройство 202, которое выпускает разделанный краб из системы 200 для дальнейшей переработки и (или) упаковки.
Показанное на фигуре 2В представляет собой схематичный вид сбоку примерного варианта осуществления системы 200 с сенсорным наведением в соответствии с настоящим изобретением. В данном случае система 200 показана вместе с корпусом 220, а именно - с жесткой рамой, которая способна обеспечивать конструктивную опору различным устройствам, которые содержит система по настоящему изобретению. Однако корпус 220 может не быть необходимым, если эти различные устройства могут использоваться как отдельные одно от другого. Во время работы корпус 220 также обычно включает в себя дверцы и панели (не показаны), которые могут действовать в качестве предохранительных элементов, например, в случае повреждения, приводящего к поломке режущего лезвия (не показано), или просто предназначены для обеспечения безопасности персонала.
Заборное устройство 201 может быть любым устройством, которое способно подавать крабов в SGP-систему 203, как правило, единообразным способом. В предпочтительном варианте осуществления заборное устройство 201 содержит ленточную конвейерную систему 201a. В более предпочтительном варианте осуществления заборное устройство 201 содержит систему 201a ременного конвейера, имеющую достаточно прочную конвейерную ленту 201b (которая может быть полупрозрачной и изготовлена, например, из термопластичного полиуретана, подходящим примером которого является NOVITANE® FG-90/85-K(8) от компании Novex, Inc.) с источником 215 света, закрепленным в каком-либо месте как под внутренней поверхностью 213 упомянутой конвейерной ленты 201b, так и непосредственно под первой сенсорной камерой 210 SGP-системы 203 (более подробно описанной ниже), если используется полупрозрачная лента, как это показано на фигуре 2B. Предпочтительный источник света 215 использует светодиодные световые модули, которые устойчивы к повреждениям, обусловленным ударами или вибрацией, и невосприимчивость которых к изменениям частоты делает их особенно пригодными для высокоскоростных цифровых камер и тому подобного окружения (подходящим примером которых являются модули Smart Vision Lights со своим производственным рядом продуктов Machine Vision Light серии LLP с задней подсветкой).
SGP-система 203 обычно содержит несколько частей или устройств, а именно - первую сенсорную камеру 210 (при необходимости - с не показанной дополнительной задней подсветкой), связанную с программным обеспечением распознавания образов, и устройство 211 перемещения с сенсорным наведением. Первой сенсорной камерой 210 может быть любая камера или подобный ей датчик, который может использоваться совместно с программным обеспечением распознавания образов, для того чтобы адекватно и надежно определять присутствие, местоположение, ориентацию и размер краба на заборном устройстве 201, а также, как вариант, - если требуются подробные изображения, и они могут быть получены камерой 210, - мест на корпусе краба, которые должны быть разрезаны в соответствии с желательным выходом крабовых частей. Было найдено, что камера с торговой маркой Cognex In-Sight 5400™ (шкала серого, разрешение 640×480 пикселей с 8-битовым динамическим диапазоном) или Cognex In-Sight 5403™ (шкала серого, разрешение 1600×1200 пикселей с 8-битовым динамическим диапазоном), содержащая программное обеспечение распознавание образов, такое как In-Sight Explorer с торговой маркой PatMax™ от Cognex Corporation (более подробно см., например: http://www.cognex.com/products/machine-vision/in-sight-explorer-software/) в зависимости от необходимого уровня детализации на отсканированных изображениях является достаточной для этой цели (более подробно обсуждается ниже). Действительно, программное обеспечение In-Sight Explorer представляет собой конфигурацию программного обеспечения, которое позволяет специалисту в данной области легко выбирать и конфигурировать предназначенные к отправки данные, а также протокол, который необходимо использовать для связи с устройством 211 перемещения с сенсорным наведением. Однако PatMax™ является проприетарным программным обеспечением на основе программного обеспечения компании Windows, в котором базовая логика и сам код от пользователя скрыты. Устройство 211 перемещения с сенсорным наведением может быть любым устройством, которое может использовать информацию, предоставленную процессором, связанным с камерой 210 датчика и с соответствующим программным обеспечением распознавания образов с целью соединения с крабом или его захвата и его размещения должным образом в удерживающей системе 204, которая, как отмечено выше, удерживает краба в фиксированном положении, оптимальном для его последующей разделки. Было найдено, что робот подборщик-установщик, такой как IRB 360 FlexPicker™ от компании ABB, имеющий вакуумный захват 212, способен достаточно эффективно функционировать в качестве устройства 211 перемещения с сенсорным наведением (более подробно см., например,; http://new.abb.com/products/robotics/industrial-robots irb-360).
Удерживающая система 204 обычно содержит несколько частей или устройств, а именно: седловину 501, фиксатор 502 и один или несколько прижимов 503, как это показано на фигуре 5. Седловина 501 может быть шарнирно соединена с рамой 210 для опоры, как показано на фигурах 5, 6А и 6D, и (или) для того, чтобы седловину 501, если это необходимо, можно было поднимать или опускать через отверстие в фиксаторе 502 (описано ниже), как это показано на фигуре 7А. Такой подъем и опускание седловины 501 может быть желательным для того, чтобы седловину 501 можно было легко заменить (например, для переработки других видов крабов) или для содействия перемещению разделанного краба на выпускное устройство 202. Седловина 501 имеет поверхность 506, которой придана форма, облегающая общую поверхность панциря (или колпака) 106 краба (см., например, показанные на фигуре 6В поз. 605, 606), тем самым обуславливая устойчивое позиционирование краба в удерживающей системе 204 перед его фиксацией и способствуя оптимальной резке и очистке краба. Облегание поверхности 506 седловины 501 может быть достигнуто нижеследующим образом, используя для этого в качестве примера краба вид "снежный краб". Во-первых, учитывая, что перерабатываемый снежный краб обычно имеет ширину панциря между 3,75" (9,5 см) и 5,5" (14 см), целью является получение поверхности 506, которая способна достаточно хорошо "стыковаться" с подавляющим большинством панцирей снежного краба, которые будут перерабатываться. Чтобы сделать это, необходимо проанализировать достаточно большое количество снежных крабов с панцирями в пределах всего диапазона ширины (например, 10), посредством 3D-сканирования получить трехмерные формы этих панцирей и создать усредненную форму (модель) панциря снежного краба, которая будет прилегать достаточно хорошо, как это требуется для переработки. Затем создают подходящий отрицательный профиль модели и на его основе получают поверхность 506 седловины. Предпочтительно, чтобы из области на поверхности 506 седловины 501, которая соответствует выступу панциря снежного краба вблизи того места, где находятся его глаза, был удален "клин" материала, в то время как на противоположной стороне поверхности 506 могут быть сделаны два дополнительных выреза, которые соответствуют известным выступам в панцире снежного краба в этих местах. Фиксатор 502 с седловиной 501, предпочтительно, не связан (чтобы обеспечить раздельный подъем и опускание седловины 501, как отмечено выше) и ему, предпочтительно, придана форма усеченного конуса, напоминающая перевернутый конус с отрезанной вершиной, самой верхней частью (см. отверстие 507). Отверстие 507 фиксатора 502 расположено несколько ниже седловины 501, чтобы конечности краба могли свисать и находились на удалении от центральной части корпуса краба (см. фигуру 6A), при этом поддерживаясь внешней поверхностью 604 фиксатора 502 под соответствующим углом, так чтобы эти конечности не превышали свою естественную протяженность, что в противном случае могло бы потенциально повредить мясо краба и (или) отрицательно повлиять на его переработку. Отверстие 507, кроме того, должно быть также достаточным для обеспечения зазора для направляемого датчиком режущего устройства 207 во время обрезания конечностей (см. ниже). Прижим(ы) 503, предпочтительно, могут перемещаться между "открытым" положением, чтобы обеспечить размещение краба на седловине 501 и фиксатором 502 (см. фигуры 5 и 8А) и "закрытым" положением, в котором он(и) способен эффективно удерживать краба на месте с достаточным прижатием на этапе обрезки, но без повреждения конечностей (см. фигуру 8B). Кроме того, прижим(ы) 503, предпочтительно, имеет такую форму, что его часть, которая входит в касание с конечностями краба (как это показано на фигуре 8В), в общем, соответствует форме наружной поверхности 604 фиксатора 502 в точке касания.
SGВ-система 205, как правило, содержит несколько частей или устройств, а именно - в качестве опции дополнительную вторую сенсорную камеру (не показана), связанную с процессором и с программным обеспечением распознавания образов, наводимое датчиком режущее устройство 207 и в качестве опции - разделочную штангу 550. Связанная с программным обеспечением распознавания образов вторая сенсорная камера считается опционной (и не является необходимой), если камера 210 и связанной с ней программное обеспечение распознавания образов SGВ-системы 203 имеют достаточно высокое разрешение и построены с возможностью детального определения формы, ориентации и размера краба с высокой точностью, а также определения мест на корпусе краба, подлежащих разрезанию, если SGP-система 203 способна передавать эту информацию в наводимое датчиком режущее устройство 207, а также если устройство 211 перемещения с сенсорным наведением способно размещать краба в удерживающей системе 204 в оптимальном фиксированном положении для последующей разделки с высокой точностью. Далее, или независимо от этого, было найдено, что камера с торговой маркой Cognex In-Sight 5403™ (шкала серого, разрешение 1600×1200 пикселей с 8-битовым динамическим диапазоном) и программное обеспечение, такое как In-Sight Explorer с торговой маркой PatMax™ от компании Cognex Corporation (более подробно см., например,: http://www.cognex.com/products/machine-vision/in-sight-explorer-software/). Наводимое датчиком режущее устройство 207 может быть любым устройством, которое способно использовать обеспеченную процессором информацию для того, чтобы точно разрезать тело краба в определенных местах для получения оптимальных крабовых продуктов на основе требуемых с потребительской точки зрения частей краба. В этом отношении было найдено, что предпочтительно, чтобы режущее устройство 207, для того чтобы отрезать конечности краба, имело погружную подачу резания при наличии кругового режущего лезвия, или чтобы использовалось устройство струйной резки водой под высоким давлением. Было найдено, что робот, такой как версия IRB 140 FoundryPlus™ от ABB со степенью защиты IP67 с вращающимся режущим лезвием, имеющим 6 степеней свободы, способен выполнять точную разделку в качестве режущего устройства 207. Разделочная штанга 550 может представлять собой любой стержень, который способен эффективно расщеплять центральный участок корпуса краба на две части, и она должна быть изготовлена из нержавеющей стали или из другого материала для пищевых продуктов.
Выпускное устройство 202 (не показано) может быть любым устройством, которое способно отбирать различные крабовые части из системы после завершения процесса разделки для передачи их на последующую переработку и (или) на упаковку. В этом отношении выходное устройство 202 может содержать, например, систему ременного конвейера, который способен переносить конечности крабов, которые смещены на него после того, как прижим(ы) 503 отжат(ы) от разделанного краба. Аналогичным же образом, система ременного конвейера может быть использована для транспортировки любых крабовых частей, которые смещены с седловины 501 (например, когда седловина 501 была опущено, чтобы можно было сместить с нее часть (части) краба. Специалистам в данной области техники хорошо известно и другое применимое здесь выходное устройство 202.
Далее описывается способ, посредством которого краб перерабатывают с момента его поступления в заборное устройство 201 до момента, когда он выходит из выдачного устройства 202 в соответствии с предпочтительным вариантом осуществления настоящего изобретения, и тем самым будут сообщены дополнительные детали системы 200 с сенсорным наведением, необходимые для обеспечения возможности осуществления специалистом в данной области техники настоящего изобретения и его использования.
Во время работы системы краб сначала должен быть размещен - неважно, вручную или известным специалистам в данной области техники автоматическим способом, - на ближнем конце движущейся конвейерной ленты 201b системы 201а ременного конвейера, но, предпочтительно, такое размещение должно производиться единообразным (и в достаточной степени распределенным) образом, обуславливающим рациональную и эффективный работу SGP-системы 203 по разделке крабов в порядке их размещения. Далее, поскольку панцирь 106 краба часто покрыт морскими водорослями, ракушками и другими осадками океана (тогда как "живот" 108 краба обычно гораздо более чистый и гладкий), предпочтительный вариант осуществления настоящей системы был построен таким образом, что крабы должны размещаться на конвейерной ленте 201b в положении "животом вверх" (то есть панцирь 106 краба при этом находится в контакте с внешней поверхностью 217 конвейерной ленты 201b). Это не только позволяет камерам 210 и программному обеспечению распознавания образов более точно и надежно определять присутствие, местоположение, ориентацию и размер краба на конвейерной ленте 201b (как это будет более подробно описано ниже), но также и обеспечивает лучшую поверхность, по которой вакуумный захват 212 может соединяться с крабом, и, в конечном счете, позволяет устройству 211 перемещения с сенсорным наведением легко помещать панцирь 106 краба на седловину 501 без необходимости в каких-либо средствах для предварительного переворачивания краба (поскольку - как пояснялось выше - седловина 501 была специально разработана, чтобы иметь поверхность 506 с соответствующими панцирю 106 краба контурами для адекватного соединения с ним).
В положении "животом вверх" краб движется горизонтально на конвейерной ленте 201b в направлении оси x двумерной плоскости x-y этой конвейерной ленты 201b (на виде сверху) от проксимального конца места размещения краба в направлении камеры 210 и устройства 211 перемещения с сенсорным наведением 211, как это показано стрелкой 302 на фигуре 3. В этом отношении, камера 210 и соответствующее программное обеспечение распознавания образов изначально были предназначены для работы таким образом, чтобы можно было отслеживать положение центральной точки (центроида) центральной части тела каждого краба как смоделированной точки на конвейерной ленте 201b с координатами (x, y) (среди других координат, как будет более подробно описано ниже), по мере того, как краб движется на конвейерной ленте 201b. Точнее говоря, положение краба камерой 210 и связанным с ней программным обеспечением распознавания образов не будет определено до тех пор, пока краб не окажется в поле зрения 214. Это поле зрения 214 определяется областью, на фигуре 2В обозначенной линиями 216, которая соответствует находящемуся в фокусе участку обзора камеры 210 на верхней поверхности 217 конвейерной ленты 201b, и которая, кроме того, как вариант, расположена непосредственно над областью конвейерной ленты 201b, которая является освещенной (когда используется полупрозрачная конвейерная лента) источником 215 света, как это показано стрелками 222. Поле зрения 214 на фигуре 3 показано также в виде области, обозначенной линиями 303А и 303В. Во время работы системы, когда поле зрения 214 подсвечивается источником 215 света, расположенным под нижней поверхностью 213 полупрозрачной конвейерной ленты 201b, это, как правило, сделано для того, чтобы гарантировать, что корпус краба будет обладать достаточным контрастом по отношению к верхней поверхности 217 самой конвейерной ленты 201b для эффективного получения изображения камерой 210, тем самым обеспечивая изображение чрезвычайно четкого силуэта, которое посредством связанного с камерой 210 процессора может быть эффективно преобразовано в данные изображения и проанализировано программным обеспечением распознавания образов (как это будет описано ниже). Вообще говоря, использование изображения силуэта, полученного так, как описано выше, является достаточным, если желательно просто определить присутствие, положение, ориентацию и размер краба на конвейерной ленте 201b, и на этой ранней стадии не является предпочтительным или желательным, чтобы камера 210 и связанное с ней программное обеспечение распознавания образов пытались также определить места на корпусе краба, которые подлежат разрезу направляемым датчиком режущим устройством 207. В такой ситуации, для того чтобы позже в этом процессе, когда краб будет помещен на седловину 501, определить места на корпусе краба, которые подлежат разрезу, может использоваться вторая сенсорная камера со связанным с ней программным обеспечением распознавания образов SGВ-системы. То есть, в противном случае, - если на ранней стадии процесса разделки желательно посредством камеры 210 и связанного с ней программного обеспечения распознавания образов определять подлежащие разрезу направляемым датчиком режущим устройством 207 места на корпусе краба, то SGP-системе не требуется конвейерная лента 201b, которая является полупрозрачной, или источник 215 света, а вместо этого она должна будет использовать камеру 210 с достаточно высоким разрешением, а вся система в целом должна будет выполнена предельно точной, имея в виду качество отсканированных изображений и их обработки, а также в точность размещения крабов в удерживающей системе 204 для получения качественных частей крабов.
Для правильного понимания того, каким образом программным обеспечением распознавания образов используется система координат (x, y), важно отметить, что координаты (x, y) устанавливаются по отношению к средней линии 305 и центральной линии 304. Средняя линия 305 представляет собой смоделированную линию, которая эффективно разрезает поле зрения 214 на конвейерной ленте 201b по ширине или по оси y поля зрения 214 пополам и представлена координатами (0, y), в то время как центральная линия 304 представляет собой смоделированную линию, которая эффективно разрезает поле зрения 214 на конвейерной ленте 201b по длине или по оси х поля зрения 214 и представлена координатами (х, 0). Точная центральная точка 306 поля зрения 214 поэтому характеризуется как точка, в которой средняя линия 305 пересекается с центральной линией 304, и представлена координатами (0,0). Ключевая опорная точка для работы программного обеспечения распознавания образов образуется, когда определено, что центральная точка центральной части корпуса краба достигла средней линии 305 поля зрения 214 на конвейерной ленте 201b. Именно в этот момент процессор вычисляет эффективное положение, ориентацию и размер краба (и, как вариант, места на крабе, подлежащие разрезу, в зависимости от того, используется ли в системе вторая сенсорная камера, как это отмечено выше) на конвейерной ленте 201b на основе информации, предоставленной программным обеспечением распознавания образов, каковая информация затем передается в устройство 211 перемещения с сенсорным наведением.
Что касается положения краба на конвейерной ленте 201b, то когда центральная точка центральной части корпуса краба достигнет средней линии 305 поля зрения 214 на конвейерной ленте 201b (то есть, когда x=0), связанный с сенсорная камера 210 процессор, отмечает координату y, которая обозначает, где на конвейерной ленте 201b относительно ее центральной линии 304 находится центральная точка (центроид) центральной части корпуса краба (то есть, насколько этот краб смещен относительно центра конвейерной ленты 201b, при этом координата +y означает, что краб расположен на некотором расстоянии "у" справа от центральной линии 304, когда он движется на ремне (как краб 320), в то время как координата -y означает, что краб расположен на некотором расстоянии "у" слева от центральной линии 304, когда он движется на ремне (как краб 325)). При этом, когда краб продолжает перемещаться вместе с конвейерной лентой 201b в направлении устройства 211 перемещения с сенсорным наведением, то координата y, очевидно, изменяться не будет, а координату x необходимо постоянно обновлять, чтобы гарантировать, что когда в соответствующий момент времени вакуумный захват 212 устройства 211 перемещения с сенсорным наведением должен соединиться с крабом или захватить его в соответствующий момент времени в точке вдоль конвейерной ленты 201b с координатной положения x, такой захват произойдет в центральной точке "живота" 108 краба для последующего его должного перемещения в удерживающей системе 204.
Что касается ориентации краба на конвейерной ленте 201b, то когда центральная точка центральной части корпуса краба достигнет средней линии 305 поля зрения 214 на конвейерной ленте 201b (то есть, когда x=0), процессор должен будет также провести анализ наилучшего соответствия, при котором он сравнивает смоделированную опорную модель видов перерабатываемого краба, такого как снежный краб, с изображениями, которые были отправлены программным обеспечением распознавания образов на процессор. Исходя из этого, наложением опорной модели видов перерабатываемого краба на изображение краба, полученное по средней линии 305, и вращением этой опорной модели вокруг центральной точки центральной части тела изображения краба можно будет понять ориентацию краба на конвейерной ленте 201b. Полезный пример для объяснения этой концепции приведен на фигурах 4А и 4В. Фигура 4А представляет собой основную опорную модель для получения силуэта внешнего очертания участка центральной части "живота" 108 снежного краба, который может существовать. Фигура 4B представляет собой упрощенную схему вида сверху эллипса 400, наложенного поверх опорной модели, показанной на фигуре 4А. Очевидно, что поворот эллипса вокруг точки 403 центроида обеспечит наилучшее соответствие в показанной ориентации. Такая же концепция применяется при наложении опорной модели перерабатываемого вида краба на изображение краба, полученное по средней линии 305. После получения наилучшего соответствия опорной модели изображению краба процессор может получить периферийные координаты различных мест по краям центральной части корпуса краба, что будет способствовать определению размера краба (что обсуждается ниже), а также определить, как сильно необходимо повернуть краба с помощью устройства 211 перемещения с сенсорным наведением для точного размещения краба в соответствующее время в удерживающей системе 204. Что касается любого необходимого поворота, то процессор будет вычислять координаты преобразования краба при его переводе из текущей ориентации (то есть, различные периферийные координаты (x, y) разных мест по краям центральной части корпуса краба) в соответствующие преобразованные координаты (x, y), что позволит осуществить правильный разворот краба посредством устройства 211 перемещения с сенсорным наведением для обеспечения правильной выставки краба в седловине 501 удерживающей системы 204 в нужное время (то есть таким образом, чтобы ориентация повернутого краба соответствовала требуемой ориентации для его правильного соединения с седловиной 501). Следует заметить, что если в SGP-системе 203 (возможно, с задней подсветкой) используется камера 210 с достаточно высоким разрешением, то можно анализировать подробные конфигурации крабов и использовать их для получения очень точной информации о центроидах и их ориентации.
В предпочтительном варианте осуществления при использовании для определения центроида и ориентации краба программного обеспечения распознавания образов PatMax™ краба без конечностей сначала сканируют и сохраняют в памяти (см. фигуру 12). В связи с этим нижняя сторона или "живот" краба имеет ряд единообразных рисунков, пригодных для распознавания с использованием обработки изображений (см. фигуру 13). Полученное изображение затем используется для "тренировки" по рисунку корпуса краба с использованием проприетарного программного инструмента, названного "TrainPatMaxPatterns", такого, посредством которого программа PatMax™ по "тренировочному" рисунку научится автоматически определять местоположение центроида и ориентацию корпуса краба. Чтобы найти центроид, программный инструмент "TrainPatMaxPatterns" помещает вокруг какого-либо четкого признака рядом с центром краба ограничительную рамку (см. рисунок 1 на фигуре 14). Затем результирующее изображение используется для "обучения" рисунку этого четкого признака. В последующих сканах используется проприетарный программный инструмент, называемый "FindPatMaxPatterns", предназначенный для автоматического поиска центроида и определения ориентации корпуса (на основе рисунка 1) любого краба с неотсеченными конечностями, который виден в поле зрения 214 на конвейерной ленте 201b.
Что касается размера краба на конвейерной ленте 201b, то когда центральная точка центральной части корпуса краба достигнет средней линии 305 поля зрения 214 на конвейерной ленте 201b (то есть, когда x=0), процессор должен будет также рассчитать эффективный трехмерный размер центральной части корпуса краба, каковая информация необходима для определения толщины краба (представленной координатой z как расстоянием центральной точки на поверхности "живота" 108 краба от верхней поверхности 217 на конвейерной ленте 201b, при этом точка z=0 представляет поверхность конвейерной ленты 201b). Однако, поскольку изображения краба получаются только в двух измерениях, то процессор должен оценить величину z, пример чего приведен ниже. Прежде всего, процессор может использовать различные периферийные координаты (x, y) разных мест по внешним краям центральной части корпуса краба (как определено выше), чтобы аппроксимировать длину и ширину центральной части корпуса краба. В целях иллюстрации - длина L центрального участка корпуса краба соответствует линии 401 большей полуоси, тогда как ширина W центрального участка корпуса краба соответствует линии 402 меньшей полуоси, как показано на фигуре 4B. Было найдено, что толщина любого конкретного вида крабов может быть надежно аппроксимирована математической зависимостью, связанной с длиной и (или) шириной краба. В случае снежного краба после взятия большой выборки и математических построений авторы изобретения определили, что для определения координаты Z (толщина краба) приемлемо следующее уравнение:
Z=0,58W+2,5
В предпочтительном варианте осуществления при использовании программного обеспечения PatMax™ масштаб краба или ширина (W) автоматически генерируется программным инструментом FindPatMaxPatterns таким образом, что при этом толщина краба (Z) может быть легко определена с использованием этой математической зависимости. Аналогичные математические соотношения между толщиной (Z) краба и его длиной (L) и (или) шириной (W) аналогичным образом могут быть определены специалистами в данной области и для других видов крабов путем простой выборки и математических построений.
Эти в конечном счете 3-мерные координаты (x, y, z) (при этом, как отмечалось выше, когда расчеты завершены, по мере продвижения краба с конвейерной лентой 201b постоянно обновляться должна только координата x), а также ориентация должны передаваться для того, чтобы вакуумный захват устройства 211 перемещения с сенсорным наведением мог в соответствующее время аккуратно соединиться с крабом или захватить его в центральной точке центральной части тела краба с смоделированными координатами (x, y) вдоль конвейерной ленты 201b на расстоянии (z) над конвейерной лентой (соответствующем толщине краба), тем самым обеспечивая, что такое соединение будет осуществляться без излишнего давления, чтобы гарантировать отсутствие повреждения крабового мяса. Таким образом, после того, как будут определены координаты (x, y, z) и ориентация, эта информация процессором передастся в устройство 211 перемещения с сенсорным наведением, которое затем посредством своего вакуумного захвата 212 аккуратно соединится с перевернутым "животом вверх" крабом, затем поднимет и переместит краба в направлении седловины 501 удерживающей системы 204 (при необходимости поворачивая краба с целью его правильной выставки, как обсуждалось выше) и, наконец, поместит перевернутого "животом вверх" краба на седловину 501, в результате чего контуры панциря 106 краба соответствующим образом совместятся с контурами на поверхности 506 седловины 501. В предпочтительном варианте осуществления выход программного обеспечения PatMax™ (то есть, координаты x, y, z и ориентация) передается на робот FlexPicker™ компании ABB через проприетарный программный инструмент PickMaster от компании ABB на базе Windows, базовая логика и сам код которого от пользователя скрыты. Движение робота управляется с использованием языка программирования, называемого RAPID, от компании ABB. Таким образом, робот запрограммирован с использованием языка RAPID для доступа к данным инструмента PickMaster. Для перемещения вакуумного захвата 212 в положение x, y, z и ориентации краба используется сформированная PickMaster команда "MoveL" языка RAPID, тем самым осуществляется движение робота.
Когда краб сначала помещен на седловину 501, зажим(ы) 503 находятся в положении "открыто", а конечности краба свисают поверх внешней поверхности 604 фиксатора 502, как это показано на фигуре 8А. Когда устройство 211 перемещения с сенсорным наведением возвращается в свое исходное положение для приема координат (x, y, z) и ориентации следующего подлежащего обработке краба на конвейерной ленте 201b, зажимы 503 перемещаются в положение "закрыто", как это показано на фигуре 8B, чтобы должным образом удерживать краба во время его разделки.
В предпочтительном варианте осуществления система 200, как вариант, содержит пользовательский интерфейс, конфигурируемый пользователем, который позволяет получать по желанию различные продукты крабов. Например, в одном способе работы система 200 сначала может быть настроена на использование разделочной штанги 550 для выполнения разреза прямо через живот 108 и панцирь 106 краба для отделения плечевого мяса (см. фигуру 9В), за чем, если желательно, следует использование режущего устройства 207 SGB-системы 205 (предпочтительно, как упоминалось, с вращающимся режущим лезвием), чтобы отрезать конечности краба.
Как отмечалось выше, если процессор SGP-системы 203 выполнен с возможностью определения с высокой точностью формы, ориентации, размера и особенностей рисунка краба (на основе информации, полученной от сенсорной камеры 210 и связанного с ней программного обеспечения распознавания образов) и если процессор SGP-системы 203 способен передавать эту информацию в SGB-систему 205, и, наконец, если устройство 211 перемещения с сенсорным наведением затем способно помещать краба в удерживающую систему 204 в оптимальное фиксированное положение для последующей разделки с высокой точностью, тогда эта разделка может выполняться без необходимости использования в противном случае второй сенсорной камеры и связанного с ней программного обеспечения распознавания образов. В этом противном случае для управления SGB-системой 205 при желании может использоваться вторая сенсорная камера с высоким разрешением с дополнительной подсветкой, такая как Cognex In-Sight 5403™ (шкала серого, разрешение 1600×1200 пикселей с 8-битовым динамическим диапазоном), использующая программное обеспечение In-Sight Explorer под торговой маркой PatMax™ от компании Cognex Corporation. В этом отношении вторая сенсорная камера и программное обеспечение распознавания образов используются для того, чтобы определять оптимальные места на корпусе краба для его эффективной разделки, после того, как краб будет помещен в удерживающую систему 204. В частности, после идентификации различных анатомических частей краба (например, суставов, конечностей 104 и участка центрального корпуса) процессор определяет места на корпусе краба, где следует делать разрезы для получения оптимальных продуктов из краба. Комбинация такой автоматической сенсорной системы, определяющей положения разрезов на корпусе краба, работающей в сочетании с точной разделочной способностью режущего робота позволяет выполнять точные и одинаковые разрезы от краба к крабу.
В варианте осуществления, который использует вторую сенсорную камеру, связанную с программным обеспечением распознавания образов, как и при работе с первой сенсорной камерой, для точной резки необходимо, чтобы камера определяла и распознавала положение центроида, а также точную ориентацию краба. Поэтому изображение краба без конечностей сначала сканируется и сохраняется в памяти программного обеспечения распознавания образов PatMax™ второй сенсорной камеры (как на фигуре 12). Поскольку нижняя сторона или "живот" краба имеет ряд неизменяющихся рисунков, пригодных для их определения с использованием обработки изображений (см. фигуру 13), то результирующее изображение снова используется для "обучения" рисунку корпуса краба с использованием описанного выше проприетарного программного инструмента "TrainPatMaxPatterns", так чтобы программное обеспечение PatMax™ научилось автоматически определять положение центроида и ориентацию корпуса краба в этом тренировочном изображении. Чтобы найти центроид, программный инструмент "TrainPatMaxPatterns" помещает вокруг какого-либо четкого отличительного признака рядом с центром краба ограничительную рамку (см. рисунок 1 на фигуре 14). Затем результирующее изображение используется для "обучения" рисунку этого отличительного признака. В последующих сканах используется проприетарный программный инструмент, называемый "FindPatMaxPatterns", предназначенный для автоматического поиска центроида и определения ориентации корпуса (на основе рисунка 1) любого краба с неотсеченными конечностями, который появляется на седловине 501.
Независимо от того, выполняется ли с помощью первой сенсорной камеры (если система не использует вторую сенсорную камеру) или с помощью второй сенсорной камерой, точная резка требует, чтобы программное обеспечение распознавания образов PatMax™ обнаруживало также другой характерный признак вблизи края нижней части или "живота" краба, как это показано на фигуре 15. Для того чтобы найти центроид характерного признака на краю краба, программный инструмент "TrainPatMaxPatterns" помещает вокруг какого-либо четкого характерного признака рядом с незагрязненным краем краба ограничительную рамку (см. рисунок 2 на фигуре 15). Затем результирующее изображение используется для "обучения" рисунку этого характерного признака. В последующих сканах, для того чтобы автоматически найти центроид и определить ориентацию корпуса рисунка 2 любого краба, который появляется на седловине 501, используется проприетарный программный инструмент, называемый "FindPatMaxPatterns". Затем для нахождения в рисунке 2 дискретного перехода между фоном и цветом краба (см. фигуру 16) используется проприетарный программный инструмент, называемый EDGE. После этого через две точки, - одну, найденную в рисунке 2, и краевую точку EDGE в рисунке 1 строится круг резания (см. фигуру 17). Используя геометрические построения, после этого устанавливают точки резания, смещенные под переменными углами относительно радиуса (см. фигур. 18). Эти точки резания - с 1 по 8 затем передаются на наводимое датчиком режущее устройства 207, предпочтительно робот IRB от компании ABB, движение которого управляется с использованием проприетарного языка программирования RAPID. Для перемещения режущего лезвия робота в необходимое положение и установки тех точек резания, которые будут давать желаемые части краба, используется команда "MoveL" языка RAPID. В этом отношении было найдено, что режущее устройство 207, для того чтобы отрезать конечности краба, должно использовать "погружную" подачу резания при наличии кругового режущего лезвия, или чтобы для этого использовалось устройство водяной струйной резки под высоким давлением.
Настоящая автоматизированная система с сенсорным наведением является адаптируемой для разделки различных видов крабов и других ракообразных, таких как омары. Конкретные и неограничивающие примеры различных видов крабов включают в себя снежный краб, краб-стригун бэрди (или красный краб), королевский краб, а также раковый краб, такой как краб Дангенесс или краб Джона.
Хотя здесь были описаны конкретные варианты осуществления изобретения, специалисту в данной области техники будет очевидно, что в эти варианты осуществления могут быть внесены изменения и модификации, сделанные в рамках объема нижеследующих пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ для разделывания крабов | 2015 |
|
RU2654626C1 |
| Устройство для обработки вареных ракообразных, крабов и омаров | 1991 |
|
SU1816197A3 |
| ЛИНИЯ для РАЗДЕЛКИ КРАБОВ НА КОНСЕРВЫ | 1973 |
|
SU368844A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДВАРИТЕЛЬНОЙ РАЗДЕЛКИ КРАБОВ | 2000 |
|
RU2179394C1 |
| Способ переработки отходов крабового производства с получением кормовой добавки | 2015 |
|
RU2615476C1 |
| СПОСОБ БЕЗОТХОДНОЙ КОМПЛЕКСНОЙ ПЕРЕРАБОТКИ ХИТИНСОДЕРЖАЩЕГО СЫРЬЯ | 2000 |
|
RU2207033C2 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ И КЛАССИФИКАЦИИ ТВЕРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ | 2023 |
|
RU2802315C1 |
| ПАНЦИРЬСОДЕРЖАЩИЙ ПРОДУКТ - КОРМОВАЯ МУКА ИЗ РАКООБРАЗНЫХ, ОБОГАЩЕННАЯ БИОАКТИВНЫМИ ВЕЩЕСТВАМИ, ИЗГОТОВЛЕННАЯ ОТСРОЧЕННЫМ СПОСОБОМ (ВАРИАНТЫ), ИСПОЛЬЗОВАНИЕ (ВАРИАНТЫ) | 2009 |
|
RU2428059C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПРОТЕИНОВОЙ КОРМОВОЙ ДОБАВКИ ДЛЯ ЛОСОСЕВЫХ РЫБ В АКВАКУЛЬТУРЕ | 2023 |
|
RU2817148C1 |
| РОБОТИЗИРОВАННЫЙ АВТОМАТИЧЕСКИЙ КОМПЛЕКС ПО СОРТИРОВКЕ ТВЁРДЫХ КОММУНАЛЬНЫХ ОТХОДОВ НА ОСНОВЕ НЕЙРОННЫХ СЕТЕЙ | 2019 |
|
RU2731052C1 |
Автоматизированная система выполнена с возможностью осуществлять интеллектуальную резку на множество частей ракообразных, таких как крабы и омары. Система способна осуществлять эффективную разделку каждого отдельного ракообразного в ответ на то, как датчики системы оценивают физические характеристики каждого ракообразного, когда он появляется на конвейере. Система содержит заборное устройство для приема ракообразного, систему позиционирования с сенсорным наведением для определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве, для соединения с ракообразным и для размещения ракообразного в удерживающей системе для его разделки, удерживающую систему для удержания ракообразного в фиксированном положении, оптимальном для разделки, систему разделки с сенсорным наведением для определения мест на корпусе ракообразного, подлежащих разрезу на основе желательного выхода частей ракообразного, и разрезания ракообразного в выбранных местах для получения оптимальных продуктов ракообразного, а также устройство, которое выпускает разделанного ракообразного для последующей упаковки. Изобретение обеспечивает систему, адаптирующуюся к каждому обрабатываемому ракообразному. 4 н. и 37 з.п. ф-лы, 32 ил.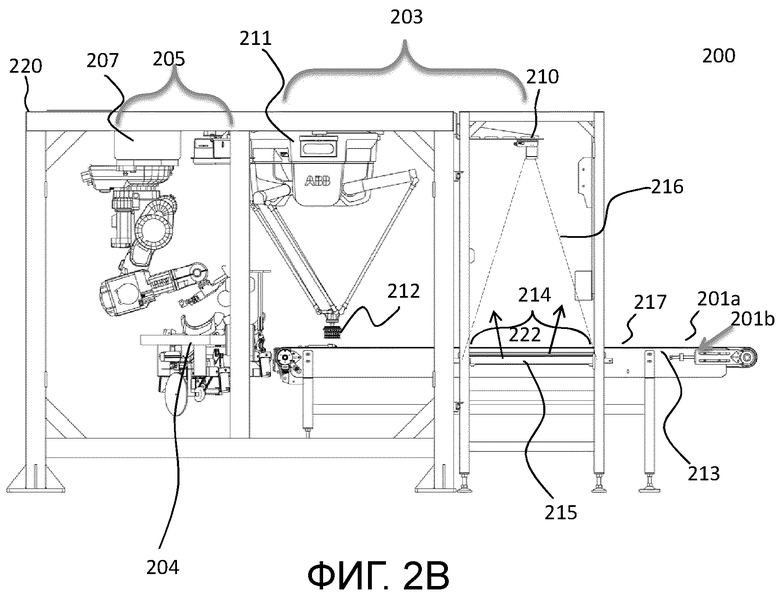
1. Автоматизированная система с сенсорным наведением, выполненная с возможностью осуществлять интеллектуальную резку крупного десятиногого ракообразного на множество частей, содержащая:
(i) заборное устройство для приема ракообразного;
(ii) систему позиционирования с сенсорным наведением для
а) определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве,
b) соединения с ракообразным и
с) размещения ракообразного в удерживающей системе для удержания ракообразного в оптимальном фиксированном положении для его последующей резки;
(iii) систему разделки с сенсорным наведением для
а) определения мест на ракообразном, подлежащих разрезу на основе желательного выхода частей ракообразного, и
b) разрезания ракообразного в этих местах для получения оптимальных частей ракообразного; а также
(iv) выдачное устройство для выпуска частей ракообразного из системы для последующей дополнительной переработки или упаковки.
2. Автоматизированная система с сенсорным наведением по п.1, в которой заборное устройство содержит ременную конвейерную систему.
3. Автоматизированная система с сенсорным наведением по п.2, в которой ременная конвейерная система содержит полупрозрачный конвейерный ремень.
4. Автоматизированная система с сенсорным наведением по п.3, дополнительно содержащая источник света, закрепленный в некотором месте под верхней внутренней поверхностью упомянутого конвейерного ремня.
5. Автоматизированная система с сенсорным наведением по любому из предшествующих пунктов, в которой система позиционирования с сенсорным наведением содержит первую сенсорную камеру, связанную с программным обеспечением распознавания образов для определения присутствия, положения, ориентации и размера ракообразного, и устройство перемещения с сенсорным наведением для соединения с ракообразным и размещения ракообразного в удерживающей системе для удержания ракообразного в фиксированном положении, оптимальном для его последующей резки.
6. Автоматизированная система с сенсорным наведением по любому из пп.1-5, в которой удерживающая система содержит
- седловину, имеющую поверхность, которой придана форма, соответствующая контуру общей поверхности панциря ракообразного для устойчивого позиционирования ракообразного в удерживающей системе,
- крепление, самая верхняя часть которого расположена ниже седловины, что позволяет конечностям ракообразного свисать с опорой по сторонам от центральной части корпуса ракообразного; и
- по меньшей мере один зажим, который выполнен с возможностью эффектно удерживать ракообразного на месте с достаточным давлением во время резки без повреждения конечностей.
7. Автоматизированная система с сенсорным наведением по п.6, в которой зажиму придана форма усеченного конуса, напоминающая перевернутый конус с отрезанной самой верхней частью, обеспечивающей отверстие вокруг периферии седловины.
8. Автоматизированная система с сенсорным наведением по п.7, в которой зажим не соединен с седловиной, разрешая по отношению к нему свободное передвижение седловины.
9. Автоматизированная система с сенсорным наведением по любому из пп.6-8, в которой по меньшей мере один зажим имеет участок, который взаимодействует с конечностями ракообразного и которому придана форма, соответствующая внешней поверхности зажима.
10. Автоматизированная система с сенсорным наведением по любому из пп.1-9, в которой система разделки с сенсорным наведением содержит вторую сенсорную камеру, связанную с программным обеспечением распознавания образов для определения мест на ракообразном, предназначенных для резки на основе желательного выхода частей ракообразного, наводимое датчиком режущее устройство для разрезки ракообразного в определенных местах для получения оптимальных частей ракообразного, и разделочную штангу, которая выполнена с возможностью эффективного разделения центрального участка корпуса ракообразного на две части.
11. Автоматизированная система с сенсорным наведением по любому из пп.1-10, в которой выдачное устройство содержит систему ременного транспортера.
12. Автоматизированная система с сенсорным наведением, выполненная с возможностью интеллектуального разреза крупного десятиногого ракообразного на множество частей, содержащая
заборное устройство для приема ракообразного;
удерживающую систему для удержания ракообразного в оптимальном фиксированном положении при разделке ракообразного;
систему позиционирования с сенсорным наведением, имеющую
- первый датчик для определения ракообразного в заборном устройстве,
- связанное с первым датчиком программное обеспечение распознавания образов для определения положения, ориентации и размера ракообразного на заборном устройстве, и
- устройство перемещения с сенсорным наведением для перемещения ракообразного от заборного устройства к удерживающей системе;
систему разделки с сенсорным наведением, имеющую
- второй датчик для определения ракообразного в удерживающей системе,
- связанное со вторым датчиком программное обеспечение распознавания образов для определения положения, ориентации и размера ракообразного на удерживающей системе и для определения на ракообразном множества мест для резки ракообразного, при этом эти места зависят от определенного положения, ориентации и размера ракообразного, и
- наводимое датчиком режущее устройство для разрезки ракообразного во множестве мест для получения множества частей ракообразного; и
выдачное устройство для приема множества частей ракообразного из удерживающей системы после того, как ракообразное было разрезано на множества частей ракообразного для последующей упаковки.
13. Автоматизированная система по п.12, в которой заборное устройство содержит систему ременного конвейера.
14. Автоматизированная система по п.13, в которой заборное устройство получает ракообразное животом вверх, таким образом, что при этом ракообразное уложено на ленточном конвейере на панцирь.
15. Автоматизированная система по п.13 или 14, в которой первый датчик содержит первую сенсорную камеру, имеющую поле зрения, охватывающее участок системы ременного конвейера, получающую изображения ракообразного.
16. Автоматизированная система по п.15, в которой программное обеспечение распознавания образов обрабатывает изображения ракообразного и генерирует данные изображений ракообразного.
17. Автоматизированная система по п.16, в которой обработка изображения ракообразных включает в себя определение положения, ориентации и размера ракообразного.
18. Автоматизированная система по любому из пп.12-17, в которой устройство перемещения с сенсорным наведением содержит роботизированную руку, имеющую прикрепленное к ней соединительное устройство для разъемного соединения с ракообразным для переноса ракообразного от заборного устройства на удерживающую систему.
19. Автоматизированная система по п.18, в которой соединительное устройство представляет собой вакуумный захват.
20. Автоматизированная система по п.13, дополнительно содержащая источник света, расположенный под системой ременного конвейера для освещения области непосредственно вокруг ракообразного с целью создания силуэта ракообразного, когда ракообразный находится в поле зрения первого датчика.
21. Автоматизированная система по п.12, в которой удерживающая система содержит
- седловину, имеющую поверхность, профилированную для сопряжения с центральным участком корпуса ракообразного;
- крепление для поддержки конечностей ракообразного; и
- один или более зажимов для удержания ракообразного в фиксированном положении прижимом конечностей ракообразного к креплению.
22. Автоматизированная система по п.21, в которой поверхность седловины профилирована для сопряжения с центральным участком корпуса ракообразного по панцирю ракообразного.
23. Автоматизированная система по п.22, в которой крепление имеет форму, подобную усеченному конусу с верхним отверстием и с нижним отверстием, при этом, когда седловина находится в положении "вверху", верхнее отверстие расположено вблизи нижней стороны седловины.
24. Автоматизированная система по п.23, в которой седловина содержит шарнирную опору для перемещения седловины между положением "вверху" и положением "внизу", в котором седловина расположена ниже нижнего отверстия крепления.
25. Автоматизированная система по п.21, дополнительно содержащая разделочную штангу, которая имеет возможность перемещаться через центральную часть корпуса ракообразного, когда ракообразное сопряжено с поверхностью седловины, для разделения центральной части корпуса ракообразного на две части и для удаления панциря с тела ракообразного.
26. Автоматизированная система по п.21, в которой второй датчик содержит вторую камеру для получения изображений ракообразного, когда ракообразное сопряжено с поверхностью седловины.
27. Автоматизированная система по п.26, в которой связанное со вторым датчиком программное обеспечение распознавания образов обрабатывает изображения ракообразного и генерирует данные изображений этого ракообразного.
28. Автоматизированная система по п.12, в которой наводимое датчиком режущее устройство содержит робот, имеющий режущий инструмент.
29. Автоматизированная система по п.28, в которой режущий инструмент представляет собой вращающееся лезвие, имеющее 6 степеней свободы для резки ракообразного.
30. Автоматизированная система с сенсорным наведением, выполненная с возможностью осуществлять интеллектуальную резку крупного десятиногого ракообразного на множество частей, содержащая
(i) заборное устройство для приема ракообразного;
(ii) систему позиционирования с сенсорным наведением для
а) определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве;
b) определения на ракообразном мест, предназначенных для разреза на основе желательного выхода частей ракообразного;
с) соединения с ракообразным; и
d) размещения ракообразного в удерживающей системе для удержания ракообразного в оптимальном фиксированном положении для его последующей резки;
(iii) систему разделки с сенсорным наведением для разрезания ракообразного в этих местах для получения оптимальных крабовых частей ракообразного; а также
(iv) выдачное устройство для выпуска частей ракообразного из системы для дальнейшей дополнительной переработки или для упаковки.
31. Автоматизированная система с сенсорным наведением по п.30, в которой заборное устройство содержит ременную конвейерную систему.
32. Автоматизированная система с сенсорным наведением по любому из пп.30 или 31, в которой система позиционирования с сенсорным наведением содержит сенсорную камеру, связанную с программным обеспечением распознавания образов для определения присутствия, положения, ориентации и размера ракообразного на заборном устройстве, а также мест на ракообразном, подлежащих разрезу на основе желательного выхода частей ракообразного; и устройство перемещения с сенсорным наведением для соединения с ракообразным и размещения ракообразного в удерживающей системе для удержания ракообразного в фиксированном положении, оптимальном для его последующей резки.
33. Автоматизированная система с сенсорным наведением по любому из пп.30-32, в которой удерживающая система содержит
- седловину, имеющую поверхность, которой придана форма, соответствующая контуру общей поверхности панциря ракообразного для устойчивого позиционирования ракообразного в удерживающей системе,
- крепление, самая верхняя часть которого расположена ниже седловины, что позволяет конечностям ракообразного свисать с опорой по сторонам от центральной части корпуса ракообразного; и
- по меньшей мере один зажим, который выполнен с возможностью эффектно удерживать ракообразного на месте с достаточным давлением во время резки без повреждения конечностей.
34. Автоматизированная система с сенсорным наведением по п.33, в которой зажиму придана форма усеченного конуса, напоминающая перевернутый конус с отрезанной самой верхней частью, обеспечивающая отверстие вокруг периферии седловины.
35. Автоматизированная система с сенсорным наведением по п.34, в которой зажим не соединен с седловиной, разрешая по отношению к нему свободное передвижение седловины.
36. Автоматизированная система с сенсорным наведением по любому из пп.33-35, в которой по меньшей мере один зажим имеет участок, который касается конечностей ракообразного, и которому придана форма, соответствующая внешней поверхности зажима.
37. Автоматизированная система с сенсорным наведением по любому из пп.30-36, в которой система разделки с сенсорным наведением содержит наводимое датчиком режущее устройство для разрезки ракообразного в определенных местах для получения оптимальных частей ракообразного, и разделочную штангу, которая выполнена с возможностью эффективного разделения центрального участка тела ракообразного на две части.
38. Автоматизированная система с сенсорным наведением по любому из пп.30-37, в которой выдачное устройство содержит систему ременного транспортера.
39. Удерживающая система для использования в автоматизированной системе с сенсорным наведением по любому из пп.1, 12 или 30, при этом удерживающая система содержит седловину, имеющую поверхность, которой придана форма, соответствующая контуру общей поверхности панциря ракообразного для устойчивого позиционирования ракообразного в удерживающей системе до разреза ракообразного на множество частей.
40. Удерживающая система по п.39, дополнительно содержащая крепление, самая верхняя часть которого расположена ниже седловины, что позволяет конечностям ракообразного свисать с опорой по сторонам от центральной части корпуса ракообразного.
41. Удерживающая система по п.40, дополнительно содержащая по меньшей мере один зажим, который выполнен с возможностью эффектно удерживать ракообразного на месте с достаточным давлением во время резки без повреждения конечностей.
| US 4380094 A1, 19.04.1983 | |||
| US 3596310 A1, 03.08.1971 | |||
| US 4286356 A1, 01.09.1981 | |||
| CA 2898895 A1, 14.08.2014 | |||
| US 5401207 A1, 28.03.1995 | |||
| US 4715093 A1, 29.12.1987 | |||
| US 4293981 A1, 13.10.1981 | |||
| US 4073041 A1, 14.02.1978 | |||
| US 3611478 A1, 12.10.1971 | |||
| US 4748724 A1, 07.06.1988 | |||
| Машина для резки ножек крабов | 1931 |
|
SU29003A1 |

