Содержание заявки на патент Японии № 2018–199113, поданной 23 октября 2018 г., настоящим включено в данный документ путём ссылки в полном объеме.
УРОВЕНЬ ТЕХНИКИ
В настоящее время во всем мире развиваются технологии, связанные с автоматическим управлением автомобилями посредством компьютерного управления. Уровни автоматизации делятся на шесть ступеней. Уровень 0 означает ступень, на которой водитель осуществляет все операции. Уровень 1 означает ступень, на которой любые операции, такие как ускорение (педаль газа), руление (рулевое колесо) и торможение (тормоз) автоматизированы. Уровень 2 означает ступень, на которой множество операций автоматизировано. Уровень 3 означает ступень, на которой все операции автоматизированы в некоторых ограниченных местах, таких как скоростные дороги, но водитель осуществляет необходимое управление лишь в экстренной ситуации. Уровень 4 означает ступень, на которой все операции автоматизированы в некоторых ограниченных местах. Уровень 5 означает ступень, на которой все операции автоматизированы во всех местах без ограничения.
Для осуществления автоматического управления важно выбирать различные виды информации, относящейся к ситуации вокруг автомобиля, например к полосе движения на дороге и к другим автомобилям. Для обеспечения автоматического управления широко использовалось распознавание изображения в отношении изображений, захваченных камерами, установленными на автомобиле (см., например, публикацию нерассмотренной заявки на патент Японии № 2018–73275, и публикацию нерассмотренной заявки на патент Японии № 2000–207563). Однако для осуществления безопасного автоматического управления необходимо распознавание ситуации вокруг автомобиля точно и в реальном времени. Необходима возможность более надежного распознавания изображения с более высокой скоростью распознавания. С этой целью на повседневной основе выполняются разработки для достижения такой способности распознавания изображения.
Например, светофоры (цвета световых сигналов светофоров) на перекрестках и железнодорожных переездах рассматриваются как информация, необходимая для обеспечения автоматического управления на уровне 3 или выше. Поскольку ошибка в распознавании или задержка в распознавании такой информации непосредственно приводит к аварии, необходимо, чтобы такая информация распознавалась точно и в реальном времени. Состояния светофоров на перекрестках и сигналы предупреждения на железнодорожных переездах изменяются от момента к моменту. А также существуют светофоры, которые внезапно появляются в поле зрения, например, сигналы сразу после изгибов дороги и сигналы сразу после совершения левого и правого поворотов. Для достижения такой способности к осуществлению распознавания точно и в реальном времени на основании только изображений, захваченных камерами, установленными на автомобиле, требуется усовершенствованная технология арифметической обработки.
Однако даже если можно добиться распознавания точно и в реальном времени на основании только изображений, захваченных камерами, установленными на автомобиле, может потребоваться внезапное торможение вследствие сигналов и железнодорожных переездов, которые внезапно появляются в поле зрения. Такое событие также может происходить при автоматическом управлении на уровне 2 или ниже. Даже при ручном управлении вместо автоматического управления может все же потребоваться внезапное торможение вследствие сигналов и железнодорожных переездов, которые внезапно появляются в поле зрения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
фиг. 1 иллюстрирует пример применения системы обеспечения информации.
Фиг. 2A иллюстрирует пример навигационного экрана на автомобиле.
Фиг. 2B иллюстрирует пример навигационного экрана на автомобиле.
Фиг. 3 иллюстрирует пример навигационного экрана на автомобиле.
Фиг. 4 иллюстрирует пример навигационного экрана на автомобиле.
Фиг. 5 иллюстрирует пример навигационного экрана на автомобиле.
Фиг. 6 – пояснительная схема формирования информации поддержки движения.
Фиг. 7 иллюстрирует пример условия дальности обеспечения информации.
Фиг. 8 иллюстрирует пример условия дальности обеспечения информации.
Фиг. 9 – пояснительная схема формирования информации прогнозирования смены сигнала.
Фиг. 10 – пояснительная схема формирования информации прогнозирования смены сигнала.
Фиг. 11A – пояснительная схема изменений частоты обеспечения для каждой цели обеспечения.
Фиг. 11B – пояснительная схема изменений частоты обеспечения для каждой цели обеспечения.
Фиг. 12 – схема функциональной конфигурации системы обеспечения информации.
Фиг. 13 иллюстрирует пример информации управления железнодорожным переездом.
Фиг. 14 иллюстрирует пример информации управления светофором.
Фиг. 15 иллюстрирует пример информации управления автомобилем.
Фиг. 16 – схема функциональной конфигурации бортового устройства.
Фиг. 17 – блок–схема процесса, выполняемого системой обеспечения информации.
Фиг. 18 – блок–схема процесса, выполняемого бортовым устройством.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже приведено множество различных вариантов осуществления или примеров реализации различных признаков заявленного изобретения. Это, конечно, лишь примеры, не предназначенные для ограничения. Кроме того, ссылочные позиции и/или буквы могут повторяться в различных примерах в описании. Это повторение нужно для простоты и наглядности и само по себе не определяет связь между различными рассмотренными вариантами осуществления и/или конфигурациями. Кроме того, когда первый элемент описан как «соединенный» со вторым элементом, такое описание включает в себя варианты осуществления, в которых первый и второй элементы непосредственно соединены друг с другом, и также включает в себя варианты осуществления, в которых первый и второй элементы опосредованно соединены друг с другом через один или более других промежуточных элементов между ними.
Настоящее изобретение относится к обеспечению автомобилю возможности предварительного получения информации, относящейся к железнодорожным переездам и светофорам на основании изображений, отличных от изображений, захваченных камерами, установленными на автомобиле. Информация может быть информацией, полезной, когда автомобиль движется в режиме автоматического управления на уровне 3 или выше или управляется водителем в режиме ручного управления.
Настоящее изобретение относится к обеспечению такой технологии, которая позволяет автомобилю заранее распознавать необходимую информацию о железнодорожных переездах и светофорах при движении автомобиля.
В соответствии с одним из некоторых вариантов осуществления, предусмотрена система обеспечения информации, которая осуществляет связь с системой управления железнодорожным переездом и системой управления светофором для обеспечения информации поддержки движения автомобилю,
причем каждая из системы управления железнодорожным переездом и системы управления светофором включает в себя функцию измерения времени с высокой точностью, которая принимает спутниковые сигналы от спутника системы глобальной спутниковой навигации (GNSS), принимает стандартную волну, или осуществляет связь с системой обеспечения информации в абсолютном времени для измерения времени с высокой точностью,
причем автомобиль включает в себя функцию позиционирования, которая принимает спутниковые сигналы от спутника GNSS для осуществления позиционирования,
причем система обеспечения информации содержит:
блок получения информации расписания железнодорожного переезда, который получает, от системы управления железнодорожным переездом, информацию расписания железнодорожного переезда, представляющую расписание времени прогнозирования предупреждения железнодорожного переезда на основании времени высокой точности для железнодорожного переезда;
блок получения информации временного режима смены сигнала, который получает, от системы управления светофором, информацию временного режима смены сигнала на основании времени высокой точности для перекрестка с сигнальными устройствами;
блок хранения, где хранится информация положения железнодорожного переезда, относящаяся к железнодорожным переездам, для которых информация расписания железнодорожного переезда может быть получена от системы управления железнодорожным переездом, и информация положения перекрестка, относящаяся к перекресткам с сигнальными устройствами, для которых информация временного режима смены сигнала может быть получена от системы управления светофором;
блок приема информации движения, который принимает информацию движения, включающую в себя информацию собственного положения автомобиля от автомобиля;
блок извлечения, который обращается к содержимому, хранящемуся в блоке хранения, для извлечения железнодорожных переездов и перекрестков с сигнальными устройствами, которые удовлетворяют условию дальности обеспечения информации, в пределах которой обеспечивается информация поддержки движения, указанная на основании информации движения; и
блок управления обеспечением информации, который формирует информацию времени прогнозирования предупреждения, относящуюся к извлеченным железнодорожным переездам, на основании информации расписания железнодорожного переезда, относящейся к извлеченным железнодорожным переездам, и информации прогнозирования смены сигнала, относящейся к извлеченным перекресткам с сигнальными устройствами, на основании информации временного режима смены сигнала, относящейся к извлеченным перекресткам с сигнальными устройствами, и обеспечивает автомобилю информацию поддержки движения, включающую в себя информацию времени прогнозирования предупреждения и информацию прогнозирования смены сигнала.
В результате, в некоторых вариантах осуществления, можно обеспечить такую систему обеспечения информации, которая обеспечивает автомобилю информацию поддержки движения, включающую в себя необходимую информацию, относящуюся к железнодорожным переездам и светофорам сигнальных устройств на перекрестках при движении автомобиля. Информация, относящаяся к железнодорожным переездам, базируется на информации, полученной от системы управления железнодорожным переездом. Информация, относящаяся к светофорам, базируется на информации, полученной от системы управления светофором. Информация поддержки движения, таким образом, образует точную информацию.
Информация, включенная в информацию поддержки движения, представляет информацию, относящуюся к железнодорожным переездам и перекресткам с сигнальными устройствами, которые удовлетворяют условию дальности обеспечения информации, на основании положения автомобиля. Таким образом, автомобиль может выбирать, без выборки информации всех железнодорожных переездов и перекрестков с сигнальными устройствами, необходимую информацию, относящуюся к железнодорожным переездам и светофорам в ходе перемещения в качестве необходимой основы, например, железнодорожным переездам и перекресткам с сигнальными устройствами, расположенным рядом с текущим положением.
Информация, относящаяся к железнодорожным переездам, которая включена в информацию поддержки движения, представляет информацию времени прогнозирования предупреждения. Информация, относящаяся к перекресткам с сигнальными устройствами, представляет информацию прогнозирования смены сигнала. Таким образом, автомобиль может заранее выбирать и распознавать информацию, полезную при движении автомобиля, например, порядок смены и время смены, прогнозируемое в отношении железнодорожных переездов и светофоров сигнальных устройств на перекрестках, состояния которых изменяются от момента к моменту.
Система управления железнодорожным переездом и система управления светофором соответственно, включают в себя устройства измерения времени с высокой точностью. Время, включенное в информацию, обеспечиваемую системами таким образом, представляет время в соответствии с информацией времени высокой точности. Каждый автомобиль аналогично включает в себя функцию измерения времени с высокой точностью. Таким образом, время можно точно синхронизировать между системами и автомобилем, поддерживая безопасное вождение автомобиля.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
условие дальности обеспечения информации включает в себя по меньшей мере условие на основании расстояния от положения, указанного информацией собственного положения автомобиля.
В результате, в некоторых вариантах осуществления, условие дальности обеспечения информации может включать в себя условие, что расстояние от положения автомобиля меньше или равно заданному расстоянию. В результате, информация поддержки движения, включающая в себя информацию, относящуюся к железнодорожным переездам и перекресткам с сигнальными устройствами, расположенным рядом с положением автомобиля, может обеспечиваться автомобилю.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
блок управления обеспечением информации обеспечивает для железнодорожных переездов и перекрестков с сигнальными устройствами, которые удовлетворяют заданному условию короткого расстояния на основании положения, указанного информацией собственного положения автомобиля, среди извлеченных железнодорожных переездов и извлеченных перекрестков с сигнальными устройствами, информацию времени прогнозирования предупреждения и информацию прогнозирования смены сигнала более часто, по сравнению с железнодорожными переездами и перекрестками с сигнальными устройствами, которые не удовлетворяют заданному условию короткого расстояния.
В результате, в некоторых вариантах осуществления, чем больше железнодорожных переездов и перекрестков с сигнальными устройствами расположено рядом с положением автомобиля, тем с большей вероятностью автомобиль вскоре достигнет железнодорожных переездов и перекрестков с сигнальными устройствами. Что касается железнодорожных переездов и перекрестков с сигнальными устройствами, которые расположены рядом с автомобилем и удовлетворяют заданному условию короткого расстояния, информация, таким образом, обеспечивается более часто по сравнению с железнодорожными переездами и перекрестками с сигнальными устройствами, отдаленными от автомобиля. Таким образом, может обеспечиваться такой вариант осуществления, который обеспечивает более подходящую информацию поддержки движения при движении автомобиля.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
информация движения включает в себя информацию направления движения, относящуюся к автомобилю, и
блок управления обеспечением информации обеспечивает для перекрестка с сигнальными устройствами, который находится непосредственно перед автомобилем, движущимся в направлении движения, указанным информацией направления движения, среди извлеченных перекрестков с сигнальными устройствами, информацию прогнозирования смены сигнала, относящуюся к сигнальным устройствам для дороги в направлении движения.
Светофорные устройства обычно устанавливаются на перекрестке для каждого направления въезда. Однако светофорное устройство, к которому должен приближаться автомобиль, въезжающий на перекресток, является светофорным устройством для дороги в направлении движения. В некоторых вариантах осуществления, можно обеспечить такой вариант осуществления, который обеспечивает более подходящую информацию поддержки движения при движении автомобиля. Например, информация, относящаяся к светофорному устройству для дороги в направлении движения, выбирается и обеспечивается автомобилю.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
блок приема информации движения принимает, когда для автомобиля запланирован маршрут движения, информацию движения, включающую в себя запланированный маршрут движения, и
блок извлечения извлекает, в случае приема запланированного маршрута движения блоком приема информации движения, железнодорожные переезды и перекрестки с сигнальными устройствами на запланированном маршруте движения.
Когда маршрут движения запланирован, автомобиль, вероятно, будет перемещаться согласно запланированному маршруту движения. В некоторых вариантах осуществления, информация поддержки движения включает в себя информацию, относящуюся к железнодорожным переездам и перекресткам с сигнальными устройствами на запланированном маршруте движения. Таким образом, можно выбирать и обеспечивать автомобилю информацию, считающуюся более полезной для перемещения.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
блок управления обеспечением информации обеспечивает, в случае приема запланированного маршрута движения блоком приема информации движения, информацию прогнозирования смены сигнала, относящуюся к сигнальным устройствам для дороги, по которой автомобиль движется согласно запланированному маршруту движения, среди сигнальных устройств на извлеченных перекрестках с сигнальными устройствами.
Светофорные устройства обычно устанавливаются на перекрестке для каждого направления въезда. Однако светофорное устройство, к которому должен приближаться автомобиль, въезжающий на перекресток, является светофорным устройством для дороги в направлении движения. В некоторых вариантах осуществления, можно обеспечить такой вариант осуществления, который обеспечивает более подходящую информацию поддержки движения при движении автомобиля. Например, выбирается и обеспечивается информация, относящаяся к светофорному устройству для дороги в направлении движения.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
блок управления обеспечением информации осуществляет, в случае приема запланированного маршрута движения блоком приема информации движения, обеспечение более часто, по сравнению со случаем, когда блок приема информации движения еще не принял запланированный маршрут движения.
Когда маршрут движения запланирован, автомобиль, вероятно, будет перемещаться согласно запланированному маршруту движения. В некоторых вариантах осуществления, автомобилю с запланированным маршрутом движения информация поддержки движения обеспечивается чаще, чем автомобилю без запланированного маршрута движения. Можно обеспечить такой вариант осуществления, который обеспечивает более подходящую информацию поддержки движения при движении автомобиля.
Согласно одному из некоторых вариантов осуществления,
в системе обеспечения информации,
блок приема информации движения принимает информацию движения, включающую в себя информацию флага, указывающую, действует ли автомобиль автоматически на заданном уровне автоматизации, и
блок управления обеспечением информации осуществляет, когда информация флага, принятая блоком приема информации движения, указывает, что автомобиль действует автоматически, обеспечение более часто, по сравнению со случаем, когда автомобиль не действует автоматически.
В результате, в некоторых вариантах осуществления, автомобиль в режиме автоматического управления должен чаще снабжаться информацией поддержки движения, чем автомобиль, не управляемый в автоматическом режиме. Можно обеспечить такой вариант осуществления, который обеспечивает более подходящую информацию поддержки движения при движении автомобиля.
Согласно одному из некоторых вариантов осуществления,
предусмотрено бортовое устройство, которое принимает информацию поддержки движения от системы обеспечения информации, причем бортовое устройство включает в себя функцию позиционирования и функцию измерения времени с высокой точностью, которая принимает спутниковые сигналы от спутника GNSS и которая измеряет время с высокой точностью, причем бортовое устройство установлено на автомобиле, причем бортовое устройство содержит
блок управления отображением, который осуществляет, на навигационном экране, управление отображением между отображением состояния железнодорожного переезда на основании информации времени прогнозирования предупреждения, включенной в информацию поддержки движения, и отображением состояния сигнала на основании информации прогнозирования смены сигнала, включенной в информацию поддержки движения.
В результате, в некоторых вариантах осуществления, навигационный экран на автомобиле может отображать, на основании информации поддержки движения, принятой от системы обеспечения информации, отображение состояния железнодорожного переезда, включающий в себя прогнозируемое время начала предупреждения железнодорожных переездов, и отображение состояния сигнала, включающий в себя спрогнозированные смены сигнала сигнальных устройств на перекрестках. Водителю автомобиля, таким образом, могут представляться не только состояния железнодорожных переездов и перекрестков с сигнальными устройствами на текущий момент, но и спрогнозированные состояния, например, следующий железнодорожный переезд, который на текущий момент не выдает предупреждение, но выдаст предупреждение через X секунд. Таким образом, можно представлять информацию, полезную для операции вождения. Бортовое устройство включает в себя функцию измерения времени с высокой точностью. Таким образом, время синхронизируется между системой управления железнодорожным переездом, системой управления светофором и бортовым устройством. Прогнозируемое содержимое не подлежит отображению ни с задержкой, ни с опережением по времени. В противном случае допустимо, что содержимое может поступать лишь с незначительной задержкой или незначительным опережением.
Согласно одному из некоторых вариантов осуществления,
в бортовом устройстве,
блок управления отображением включает в себя блок управления отображением прогнозирования, который осуществляет, на основании прогнозируемого времени прибытия для железнодорожных переездов и перекрестков с сигнальными устройствами на запланированном маршруте движения, когда маршрут движения запланирован, отображение состояния железнодорожного переезда и отображение состояния сигнала в прогнозируемое время прибытия.
В результате, в некоторых вариантах осуществления, навигационный экран на автомобиле может отображать спрогнозированное время прибытия вдоль запланированного маршрута движения, заданного для автомобиля, и отображать состояние железнодорожного переезда или отображать состояние сигнала в это время для железнодорожных переездов и перекрестков с сигнальными устройствами на запланированном маршруте движения на основании информации поддержки движения, принятой от системы обеспечения информации. Водителю автомобиля, таким образом, может представляться информация, полезная для операции вождения для замедления автомобиля, вместо ускорения, поскольку железнодорожный переезд, к которому приближается водитель, выдает, например, предупреждение.
Согласно одному из некоторых вариантов осуществления,
в бортовом устройстве,
блок управления отображением включает в себя
блок управления отображением пиктограмм идентификации, который предписывает, когда отображаемая карта на навигационном экране включает в себя железнодорожные переезды согласно информации времени прогнозирования предупреждения, включенной в информацию поддержки движения, и/или перекрестки с сигнальными устройствами согласно информации прогнозирования смены сигнала, включенной в информацию поддержки движения, отображаемой карте отображать заданные пиктограммы идентификации на железнодорожных переездах и/или перекрестках с сигнальными устройствами и
блок управления отображением подробностей, который подробно отображает состояние выбранного железнодорожного переезда и/или состояние выбранного сигнального устройства на перекрестке в соответствии с операцией выбора одной из пиктограмм идентификации.
В результате, в некоторых вариантах осуществления, навигационный экран на автомобиле может по выбору отображать на отображаемой карте пиктограммы идентификации на железнодорожных переездах и перекрестках с сигнальными устройствами, информация которых включена в информацию поддержки движения, принятую от системы обеспечения информации. Когда пиктограмма идентификации выбрана, состояние железнодорожного переезда или перекрестка с сигнальными устройствами, который соответствует выбранной пиктограмме идентификации, может отображаться в подробностях. Таким образом, водитель автомобиля может свободно выбирать железнодорожный переезд или перекресток с сигнальными устройствами, расположенный рядом с автомобилем, например, для проверки его состояния. Таким образом, может обеспечиваться информация, полезная для операции вождения.
Ниже описаны иллюстративные варианты осуществления. Следует отметить, что нижеследующие иллюстративные варианты осуществления никоим образом не ограничивают объем правовой охраны, определяемый нижеприведенной формулой изобретения. Следует также отметить, что все элементы, описанные в настоящем варианте осуществления, не обязательно рассматривать как существенные элементы.
Общая конфигурация
Фиг. 1 иллюстрирует пример применения системы 1 обеспечения информации согласно настоящему варианту осуществления. Как показано на фиг. 1, система 1 обеспечения информации, является системой, которая осуществляет связь, через сеть N1 связи, с системой 10 управления железнодорожным переездом и системой 30 управления светофором для обеспечения, через сеть N2 связи, информации поддержки движения на бортовое устройство 40, установленное на автомобиле. Сеть связи обозначает тракт связи, позволяющий передавать данные, и включает в себя локальные сети (LAN), например, арендованные линии для прямого соединения и Ethernet (зарегистрированный товарный знак), а также включает в себя сети связи, например, сети мобильной связи, кабельные сети и интернет. Способ осуществления связи, относящийся к сети связи, подлежащий надлежащему выбору, может быть проводным или беспроводным. Например, сеть N1 связи может быть проводной, тогда как сети N2 – N4 связи могут быть беспроводным.
Система 10 управления железнодорожным переездом является системой, которая осуществляет централизованное управление предупреждениями железнодорожного переезда RC, на основании положения движения и скорости перемещения поезда. В конфигурации системы 10 управления железнодорожным переездом, центральное устройство 12 управления железнодорожным переездом, соединённое с возможностью передачи данных через сеть N1 связи с системой 1 обеспечения информации, соединено с возможностью передачи данных через сеть N3 связи с контроллером 14 железнодорожного переезда, установленным для каждого железнодорожного переезда RC и бортовой системы 20 поезда.
Центральное устройство 12 управления железнодорожным переездом вычисляет спрогнозированное время прибытия к железнодорожному переезду RC на основании положения движения и скорости перемещения, полученного от бортовой системы 20 поезда, и передает, на соответствующий контроллер 14 железнодорожного переезда, для каждого железнодорожного переезда RC, информацию управления железнодорожным переездом, включающую в себя время начала предупреждения, вычисленное на основании прогнозируемого времени прибытия, когда прогнозируется прибытие поезда на железнодорожный переезд RC. Контроллер 14 железнодорожного переезда встроен в приборный блок, установленный рядом с железнодорожным переездом, например, следует информации управления железнодорожным переездом, принятой от центрального устройства 12 управления железнодорожным переездом, и управляет защитными установками железнодорожного переезда, включающими в себя дорожное предупреждающее устройство 16 и железнодорожный шлагбаум 18, обеспеченные на железнодорожный переезд RC. Таким образом, по достижении времени начала предупреждения железнодорожного переезда, выдается предупреждение, заключающееся в том, что дорожное предупреждающее устройство 16 начинает издавать звук, и железнодорожный шлагбаум 18 опускается. Когда электронный детектор поезда, обеспеченный на выходной стороне железнодорожного переезда RC обнаруживает, что поезд прошел, предупреждение останавливается, в том смысле, что дорожное предупреждающее устройство 16 прекращает издавать звук, и железнодорожный шлагбаум 18 поднимается.
Система 30 управления светофором является системой, которая осуществляет централизованное управление светофорами на перекрестке IS (в настоящем варианте осуществления, перекресток, где установлены светофорные устройства, или «перекресток с сигнальными устройствами»). В конфигурации системы 30 управления светофором, центральное устройство 32 управления светофором с возможностью передачи данных, соединённое через сеть N1 связи с системой 1 обеспечения информации, соединено с возможностью передачи данных через сеть N4 связи с контроллером 34 сигнализации, установленным для каждого перекрестка IS.
Например, на основании количества автомобилей, прошедших и обнаруженных детекторами автомобилей, центральное устройство 32 управления светофором связывает между собой большое количество расположенных рядом друг с другом перекрестков, осуществляет управление системой маршрутизации или управление поверхностью, которое изменяет параметры управления сигнализацией (длительность цикла, разделение и смещение) на перекрестках, и передает, для каждого перекрестка, информацию управления светофором, включающую в себя параметры управления сигнализацией, на соответствующий контроллер 34 сигнализации. Контроллер 34 сигнализации встроен в приборный блок, установленный рядом с перекрестком, например, следует информации управления светофором, принятой от центрального устройства 32 управления светофором, и управляет светофорными устройствами 36, установленными на перекрестке IS. Таким образом, контроллер 34 сигнализации руководствуется параметрами управления сигнализацией, вычисляет период отображения в секундах на каждом этапе в таблице этапов представления, указанной на перекрестке IS, и предписывает светофорным устройствам 36 менять отображение во временном режиме по прошествии периода отображения в секундах.
Система 1 обеспечения информации получает частично или полностью информацию управления железнодорожным переездом для каждого железнодорожного переезда RC от центрального устройства 12 управления железнодорожным переездом, а также получает частично или полностью информацию управления светофором для каждого перекрестка IS от центрального устройства 32 управления светофором. На основании полученной информации, система 1 обеспечения информации формирует информацию поддержки движения для каждого автомобиля, и передает информацию поддержки движения на соответствующее бортовое устройство 40.
Бортовое устройство 40 использует информацию поддержки движения, принятую от системы 1 обеспечения информации, и поддерживает перемещение автомобиля с установленным на нем бортовым устройством 40. Бортовое устройство 40 включает в себя приемник системы глобальной спутниковой навигации (GNSS), который принимает спутниковый сигнал от спутника G GNSS, и функцию позиционирования на основании принятого сигнала спутника GNSS. В настоящем варианте осуществления предполагается, что на автомобиле с установленным на нем бортовым устройством 40 установлено устройство автоматического управления, позволяющее водителю переключать режим управления между режимом автоматического управления, в котором автомобиль управляется устройством автоматического управления, и режимом ручного управления, в котором автомобиль вручную управляется водителем.
Каждое из системы 1 обеспечения информации, центрального устройства 12 управления железнодорожным переездом, контроллера 14 железнодорожного переезда, бортовой системы 20 поезда, центрального устройства 32 управления светофором, контроллера 34 сигнализации и бортового устройства 40 включает в себя приемник GNSS, который принимает спутниковый сигнал от спутника G GNSS, и функцию измерения времени с высокой точностью, которая измеряет время с высокой точностью на основании принятого сигнала спутника GNSS. Благодаря тому, что устройствами не разрешается осуществлять особую связь для синхронизации по времени, каждое из устройств осуществляет автономное управление, чтобы, таким образом, достигать синхронизации по времени между устройствами. Спутник G GNSS является спутником, используемым в системе глобальной спутниковой навигации (GNSS), включающей в себя, например, глобальную систему позиционирования (GPS), европейскую геостационарную службу навигационного покрытия (EGNOS), квазизенитную спутниковую систему (QZSS), глобальную навигационную спутниковую систему (ГЛОНАСС), GALILEO и навигационную спутниковую систему Beidou (BeiDou).
Особенность
(A) Поддержка движения
В качестве одного из видов поддержки движения на основании информации поддержки движения, принятой бортовым устройством 40 от системы 1 обеспечения информации, автомобиль предписывает автомобильному навигационному устройству отображать на своем экране дисплея (навигационном экране), отображение экрана на основании информации поддержки движения.
На фиг. 2A, 2B и 3 приведены примеры отображения на навигационном экране на автомобиле. Как показано на фиг. 2A, 2B и 3, каждый из навигационных экранов W (W1 – W5) отображает отображение E1 текущего времени и отображение E3 карты, а также отображает отображение E5 поддержки движения на основании информации поддержки движения. Отображение E1 текущего времени обеспечивает время, измеренное высокой точности функцией измерения времени с высокой точностью, обеспеченной в бортовом устройстве 40. Отображение E3 карты отображает на отображаемой карте пиктограмму D1 в виде стрелки, указывающую текущее положение и направление движения автомобиля, и запланированный маршрут 44 движения к заданному пункту назначения, который указан толстой линией. Текущее положение и направление движения автомобиля получаются функцией позиционирования, обеспеченной в бортовом устройстве 40.
В качестве отображения E5 поддержки движения отображается отображение состояния железнодорожного переезда, относящийся к железнодорожным переездам, как показано на фиг. 2A и 2B, или отображение состояния сигнала, относящийся к светофорам на перекрестках, как показано на фиг. 3. Отображать ли в качестве отображения E5 поддержки движения отображение состояния железнодорожного переезда или отображение состояния сигнала, будет определяться на основании текущего положения и направления движения автомобиля. Таким образом, когда железнодорожный переезд RC располагается непосредственно перед автомобилем, движущимся в направлении движения вдоль запланированного маршрута движения, отображается отображение состояния железнодорожного переезда, относящийся к железнодорожному переезду RC. Когда перекресток IS располагается непосредственно перед автомобилем, движущимся в направлении движения вдоль запланированного маршрута движения, отображается отображение состояния сигнала, относящийся к перекрестку IS.
Отображение состояния железнодорожного переезда отображает, как показано на фиг. 2A и 2B, название C1 соответствующего железнодорожного переезда RC, текущее состояние C3, указывающее, выдано ли предупреждение, и спрогнозированное состояние C5, указывающее спрогнозированное, следующее состояние. Таким образом, как показано на фиг. 2A, когда текущим состоянием C3 соответствующего железнодорожного переезда является «предупреждение», время окончания предупреждения, когда заканчивается текущее предупреждение, отображается как спрогнозированное состояние C5. Как показано на фиг. 2B, когда текущим состоянием C3 является «не предупреждение», время начала предупреждения, когда начинается следующее предупреждение, отображается как спрогнозированное состояние C5. Что касается времени окончания предупреждения или времени начала предупреждения, время, оставшееся до времени, отображается в обратном порядке.
Отображение состояния сигнала отображает, как показано на фиг. 3, название C2 соответствующего перекрестка, текущее состояние C3, указывающее отображение светофорного устройства 36, например «красный, зеленый или желтый», и спрогнозированное состояние C5, указывающее спрогнозированное, следующее состояние. В качестве спрогнозированного состояния C5 отображаются следующее отображение и время смены отображения. Что касается времени смены, время, оставшееся до упомянутого времени, отображается в обратном порядке. Светофорное устройство 36, для которого его состояние отображается в отображении состояния сигнала, соответствует, среди светофорных устройств 36, установленных на соответствующем перекрестке IS, светофорному устройству 36 для дороги, по которой автомобиль движется согласно запланированному маршруту 44 движения, т.е. светофорному устройству 36, которому должен подчиняться автомобиль, движущийся согласно запланированному маршруту 44 движения и въезжающий на перекресток IS.
Отображения E5 поддержки движения на навигационных экранах W (W1 – W5), представленные на каждом из фиг. 2A, 2B и 3, отображают текущее состояние либо железнодорожного переезда (на фиг. 2A и 2B, «железнодорожного переезда △△»), либо перекрестка (на фиг. 3, «перекрестка ○○») непосредственно перед автомобилем, движущимся в направлении движения. При выборе пиктограммы D7 идентификации (D7a или D7b) на отображении E3 карты на экране дисплея, отображение E5 поддержки движения переключается на отображение подробностей, указывающий состояние железнодорожного переезда RC или перекрестка IS, соответствующего выбранной пиктограмме D7 идентификации (D7a или D7b).
Фиг. 4 иллюстрирует пример навигационного экрана, в котором отображение E5 поддержки движения переключается на отображение подробностей другого железнодорожного переезда RC или другого перекрестка IS. На фиг. 4, отображение E3 карты отображает пиктограмму D7a идентификации как «перекресток ○○» непосредственно перед автомобилем, движущимся в направлении движения согласно запланированному маршруту 44 движения, и пиктограмму D7b идентификации как следующий «перекресток ××». Тогда как отображение E5 поддержки движения отображает отображение подробностей железнодорожного переезда RC или перекрестка IS (на фиг. 4, «перекресток ××») соответствующий пиктограмме идентификации, выбранной из вышеперечисленных пиктограмм идентификации. Аналогично фиг. 2A, 2B и 3, отображение подробностей отображает название C1, текущее состояние C3 и спрогнозированное состояние C5 железнодорожного переезда RC или перекрестка IS. Светофорное устройство 36, отображаемое на отображении подробностей, аналогично соответствует, среди светофорных устройств 36, установленных на соответствующем перекрестке IS, светофорному устройству 36 для дороги, по которой автомобиль движется согласно запланированному маршруту 44 движения.
Отображения E5 поддержки движения на навигационных экранах W (W1 – W7), представленные на фиг. 2–4, являются отображениями текущей ситуации, указывающими текущие состояния железнодорожных переездов RC и перекрестков IS. При выборе пиктограммы D3 отображения прогнозирования, обеспеченной в нижней части экрана дисплея, отображение E5 поддержки движения переключается на отображение прогнозирования, указывающий состояния железнодорожных переездов и перекрестков, во время, когда спрогнозировано прибытие автомобиля.
Фиг. 5 иллюстрирует пример навигационного экрана, в котором отображение E5 поддержки движения переключается на отображение прогнозирования. Как показано на фиг. 5, помимо отображения E1 текущего времени и отображения E3 карты, навигационный экран W9 отображает, в порядке прибытия, в качестве отображения E5 поддержки движения, названия C7, прогнозируемое время C9 прибытия и прогнозируемое состояние C11 на прогнозируемое время C9 прибытия, соответственно, множества железнодорожных переездов RC и перекрестков IS (на фиг. 5, «трех») в которые спрогнозировано прибытие автомобиля, движущегося согласно запланированному маршруту 44 движения, отображаемому на отображении E3 карты. Спрогнозированное состояние C11 отображает «въезжать» или «не въезжать» для железнодорожного переезда RC, или отображение светофорного устройства на перекрестке IS, например, «красный», «зеленый» или «желтый». Аналогично, светофорное устройство 36, отображаемое на отображении прогнозирования, соответствует, среди светофорных устройств 36, установленных на соответствующем перекрестке IS, светофорному устройству 36 для дороги, по которой автомобиль движется согласно запланированному маршруту 44 движения. При выборе пиктограммы D5 отображения текущей ситуации, обеспеченной в нижней части экрана дисплея, отображение E5 поддержки движения переключается на отображение текущей ситуации, как показано на фиг. 2–4.
(B) Формирование информации поддержки движения
Далее будет описано формирование информации поддержки движения в системе 1 обеспечения информации. На фиг. 6 представлена пояснительная схема формирования информации поддержки движения в системе 1 обеспечения информации. Как показано на фиг. 6, система 1 обеспечения информации получает, для каждого железнодорожного переезда, информацию 62 расписания железнодорожного переезда, представляющую расписание времени прогнозирования предупреждения железнодорожного переезда на основании времени высокой точности, от центрального устройства 12 управления железнодорожным переездом системы 10 управления железнодорожным переездом. Информация 62 расписания железнодорожного переезда включает в себя время обновления самой информации на основании времени высокой точности, текущее состояние 62a железнодорожного переезда RC, получаемое от соответствующего контроллера 14 железнодорожного переезда, и будущее время 62b начала предупреждения и будущее время 62c окончания предупреждения, вычисленные для управления предупреждением для железнодорожного переезда RC. Текущее состояние 62a включает в себя, например, определение, выдано ли предупреждение, и время остановки последнего предупреждения. Время 62b начала предупреждения и время 62c окончания предупреждения может быть запланированным временем (или спрогнозированным временем) для всего управления предупреждением, длящегося в течение заданного периода (например, 30 минут) от текущего времени или длящегося до запланированного времени, относящегося к предупреждениям до заданного числа раз (например, трех раз).
Информация 64 временного режима смены сигнала на основании времен высокой точности дополнительно получается для каждого перекрестка от центрального устройства 32 управления светофором системы 30 управления светофором. Информация 64 временного режима смены сигнала включает в себя время обновления самой информации на основании времени высокой точности, текущее состояние 64a (включающее в себя номер этапа в таблице этапов представления и время перехода к этапу) перекрестка IS, получаемое от соответствующего контроллера 34 сигнализации, и параметр 64b управления сигнализацией (длительность цикла, разделение и смещение), формируемый для управления сигнализацией перекрестка IS.
Информация 66 движения дополнительно получается от бортового устройства 40 автомобиля, которое обеспечивает информацию поддержки движения. Информация 66 движения включает в себя время обновления самой информации на основании времени высокой точности, положение 66a движения, представляющее информацию собственного положения автомобиля, скорость 66b перемещения, направление 66c движения, представляющее информацию направления движения, запланированный маршрут 66d движения и флаг 66e автоматического управления, представляющий информацию флага, указывающую, осуществляется ли управление автомобилем в режиме автоматического управления на заданном уровне автоматизации, т.е., конкретно, является ли режим управления «режимом автоматического управления» или «режимом ручного управления».
Система 1 обеспечения информации формирует на основании полученной информации информацию 3 поддержки движения, обеспечиваемую автомобилю, и передает информацию 3 поддержки движения на бортовое устройство 40. Для формирования информации 3 поддержки движения, железнодорожные переезды RC и перекрестки IS, удовлетворяющие данному условию дальности обеспечения информации, сначала извлекаются в качестве целей обеспечения на основании положения 66a движения, включенного в информацию 66 движения.
Условие дальности обеспечения информации представляет условие на основании положения автомобиля. Конкретный пример условия дальности обеспечения информации представлен на фиг. 7. Фиг. 7 иллюстрирует пример, в котором условие дальности обеспечения информации включает в себя «на запланированном маршруте движения для автомобиля». Таким образом, в примере на фиг. 7, один железнодорожный переезд RC1 и шесть перекрестков IS1 – IS6 на запланированном маршруте 44 движения автомобиля 42 удовлетворяют условию дальности обеспечения информации и извлекаются в качестве целей обеспечения. Условие дальности обеспечения информации может базироваться на расстоянии от положения автомобиля 42, перемещающегося не на всем, а на части запланированного маршрута 44 движения, например «в пределах заданного расстояния вдоль запланированного маршрута движения от положения автомобиля».
Другой пример условия дальности обеспечения информации представлен на фиг. 8. Фиг. 8 иллюстрирует пример, в котором условие дальности обеспечения информации включает в себя «расстояние от автомобиля меньше или равно заданному расстоянию». Таким образом, радиус вокруг положения автомобиля 42 задает круговую дальность на заданном расстоянии. Условие дальности обеспечения информации указывает, что цели находятся в пределах дальности. На фиг. 8, два железнодорожных переезда RC11 и RC12 и семь перекрестков IS11 – IS17 удовлетворяют условию дальности обеспечения информации и извлекаются в качестве целей обеспечения.
Кроме того, условие дальности обеспечения информации может включать в себя «расстояние от автомобиля меньше или равно заданному расстоянию, и на запланированном маршруте движения для автомобиля». На фиг. 8 в качестве «расстояние от автомобиля» используется расстояние по прямой. Однако очевидно можно использовать расстояние вдоль маршрута.
Когда условие дальности обеспечения информации базируется на расстояния от положения автомобиля 42, расстояние, подлежащее использованию для условия дальности обеспечения информации, может изменяться в зависимости от того, осуществляется ли управление автомобилем 42 в автоматическом режиме. Кроме того, расстояние, подлежащее использованию для условия дальности обеспечения информации, может изменяться в зависимости от уровня автоматизации, когда управление автомобилем осуществляется в автоматическом режиме.
Как описано выше, после извлечения железнодорожных переездов RC и перекрестки IS, удовлетворяющих условию дальности обеспечения информации, в качестве целей обеспечения информации поддержки движения, информация 3 поддержки движения, включающая в себя информацию, относящуюся к железнодорожным переездам RC и перекресткам IS, соответственно извлеченным в качестве целей обеспечения формируется на основании полученной информации 62 расписания железнодорожного переезда и полученной информации 64 временного режима смены сигнала. Таким образом, что касается железнодорожного переезда RC, информация 62 расписания железнодорожного переезда, относящаяся к железнодорожному переезду RC, связана с железнодорожным переездом ID железнодорожного переезда RC для формирования информации 5 времени прогнозирования предупреждения. Что касается перекрестка IS, информация 329 времени смены сигнала, относящаяся к светофорному устройству 36 для дороги, по которой автомобиль 42 движется согласно запланированному маршруту 44 движения, среди светофорных устройств 36, установленных на перекрестке IS, формируется на основании информации 64 временного режима смены сигнала, относящейся к перекрестку IS. Информация связана с ID сигнального устройства светофорного устройства 36 для формирования информации 7 прогнозирования смены сигнала.
На фиг. 9 и 10 показаны схемы, поясняющие формирование информации 329 времени смены сигнала. Как показано на фиг. 9 и 10, система 1 обеспечения информации вычисляет периоды отображения в секундах для следующих этапов на основании таблицы 326 этапов представления, которая указана для целевого перекрестка IS и которая хранится в хранилище 300, а также на основании текущего состояния 64a и параметра 64b управления сигнализацией, включенного в информацию 64 временного режима смены сигнала, полученную от центрального устройства 32 управления светофором. Затем время смены для следующих этапов прогностически вычисляется для формирования информации 329 времени смены сигнала. Кроме того, в качестве информации 329 времени смены сигнала отображения сигналов, например «красный, зеленый и желтый» и время их смены вычисляется соответственно для светофорных устройств 36, установленных на перекрестке IS.
Затем информация 5 времени прогнозирования предупреждения для железнодорожного переезда RC и информация 7 прогнозирования смены сигнала для перекрестка IS, сформированные как описано выше, включаются в информацию 3 поддержки движения, которую необходимо сформировать, помимо времени обновления самой информации на основании времени высокой точности, которое измеряется системой 1 обеспечения информации.
(C) Частота обеспечения информации 3 поддержки движения
Информация 3 поддержки движения будет обеспечиваться системой 1 обеспечения информации автомобилю (в смысле ряда процессов, включающих в себя извлечение целей обеспечения на основании положения автомобиля, формирование информации 3 поддержки движения, включающей в себя информацию, относящуюся к целям обеспечения, и передачу информации 3 поддержки движения на бортовое устройство 40) неоднократно и время от времени с заданными интервалами времени (частоту обеспечения). Однако частота обеспечения информации 3 поддержки движения может изменяться. Например, в случае, когда маршрут движения автомобиля запланирован, информация 3 поддержки движения может обеспечиваться более часто, по сравнению со случаем, когда маршрут движения автомобиля не запланирован. В противном случае, в случае, когда режим управления автомобилем является «режимом автоматического управления», информация 3 поддержки движения может обеспечиваться более часто, по сравнению со случаем, когда режим управления автомобилем является «режимом ручного управления». Кроме того, в случае, когда режим управления автомобилем является режимом автоматического управления, частота обеспечения может изменяться в соответствии с уровнем автоматизации.
Информация 3 поддержки движения включает в себя информацию, относящуюся к множеству железнодорожных переездов RC и перекрестков IS, соответственно, извлеченную в качестве целей обеспечения. Однако частота (частота обеспечения), с которой информация, относящаяся к цели обеспечения, обеспечивается автомобилю, может изменяться для каждой цели обеспечения. Частота обеспечения, с которой информация, относящаяся к цели обеспечения, обеспечивается автомобилю, определяется в соответствии с положением автомобиля.
На фиг. 11A и 11B показаны схемы, поясняющие пример частоты обеспечения в соответствии с положением автомобиля. На фиг. 11A показан график, где расстояние L (которое может быть расстоянием по прямой, кратчайшим расстоянием вдоль маршрута или расстоянием вдоль запланированного маршрута движения) от положения автомобиля 42 к цели обеспечения (железнодорожному переезду или перекрестку) отложено по горизонтальной оси, иллюстрирующий пример соотношения между расстоянием L и частотой F (частотой обеспечения), с которой информация, относящаяся к цели обеспечения, обеспечивается автомобилю.
Согласно фиг. 11A, частота F обеспечения, с которой информация, относящаяся к цели обеспечения, обеспечивается автомобилю 42 изменяется таким образом, что на более коротком (близком) расстоянии L от положения автомобиля 42 до цели обеспечения, частота F обеспечения оказывается более высокой (информация обеспечивается чаще), тогда как на более длинном (дальнем) расстоянии L частота F обеспечения оказывается более низкой (информация обеспечивается реже). Таким образом, для железнодорожных переездов RC и перекрестков IS, удовлетворяющих “условию короткого расстояния”, указывающему, что расстояние от положения автомобиля 42 короче, указывается, что информация, относящаяся к железнодорожным переездам RC и перекресткам IS, обеспечивается чаще, чем для железнодорожных переездов и перекрестков, которые не удовлетворяют «условию короткого расстояния».
Соотношение между расстоянием L и частотой F обеспечения может быть, например, таким, что частота F обеспечения уменьшается пропорционально расстоянию L, как показано на графике y1, или таким, что частота F обеспечения уменьшается ступенчато в соответствии с расстоянием L, как показано на графике y2. Соотношение между расстоянием L и частотой F обеспечения может изменяться в зависимости от того, является ли целью обеспечения железнодорожный переезд RC или перекресток IS. Например, когда целью обеспечения является перекресток IS, применяется график y1. Если же целью обеспечения является железнодорожный переезд RC, применяется график y3. В противном случае, соотношение между расстоянием L и частотой F обеспечения может изменяться в зависимости от того, запланирован ли для автомобиля 42 маршрут 44 движения.
То, обеспечивается ли информация, относящаяся к цели обеспечения, в качестве информации 3 поддержки движения автомобилю 42 во время T0, можно определить как показано на фиг. 11B. То есть, вычисляется расстояние L между положением автомобиля 42 и целью обеспечения во время T0. Например, указанное соотношение, представленное в качестве примера на фиг. 11A, используется для получения частоты F обеспечения, соответствующей расстоянию L. Непосредственно предшествующее время Tn обеспечения информации 3 поддержки движения определяется на основании истории 338 обеспечения информации поддержки движения автомобилю 42. Получается истекшее время tn от времени Tn обеспечения до времени T0. Затем истекшее время tn сравнивается с интервалом D обеспечения (= 1/F), который является величиной, обратной частоте F обеспечения. Когда истекшее время tn превышает интервал D обеспечения (tn ≥ D), принимается решение, что информация, относящаяся к цели обеспечения, должна «обеспечиваться» автомобилю 42. В противном случае (tn < D), принимается решение, что информация не должна «обеспечиваться» автомобилю 42.
Функциональная конфигурация
(A) Система 1 обеспечения информации
На фиг. 12 показана блок–схема, демонстрирующая функциональную конфигурацию системы 1 обеспечения информации. Согласно фиг. 12, система 1 обеспечения информации включает в себя операционную секцию 102, дисплей 104, секцию 106 вывода звука, секцию 108 связи, секцию 110 приема GNSS, секцию 200 обработки и хранилище 300. Таким образом, система 1 обеспечения информации может образовывать компьютерную систему.
Операционная секция 102 реализована устройствами ввода, например, кнопочными переключателями, сенсорной панелью и клавиатурой, и выводит сигнал операции, соответствующий принятой операции, в секцию 200 обработки. Дисплей 104 реализован устройством отображения, например, жидкокристаллическим дисплеем (LCD) или сенсорной панелью, и осуществляет различные типы отображения на основании сигнала отображения от секции 200 обработки. Секция 106 вывода звука реализована устройством вывода звука, например, громкоговорителем, и осуществляет различные типы вывода звука на основании звукового сигнала от секции 200 обработки. Секция 108 связи реализована устройством проводной или беспроводной связи, например, соединена с сетями N1 и N2 связи, и осуществляет связь с различными типами внешних устройств, например, центральным устройством 12 управления железнодорожным переездом, центральным устройством 32 управления светофором и бортовым устройством 40.
Секция 110 приема GNSS является приемником GNSS, который принимает сигнал спутника GNSS от спутника G GNSS, осуществляет вычисление местоположения на основании принятого сигнала спутника GNSS, и вычисляет положение, представленное широтой, долготой и высотой, а также вычисляет ошибку (временную ошибку) из времени измерения секцией 220 тактирования.
Секция 200 обработки реализована устройством арифметических операций, например, центральным процессором (CPU), обеспечивает инструкции и переносит данные на компоненты системы 1 обеспечения информации на основании программ и данных, например, хранящихся в хранилище 300, и управляет всей системой 1 обеспечения информации. Секция 200 обработки выполняет программу 302 обеспечения информации, хранящуюся в хранилище 300, чтобы функционировать как соответствующие функциональные блоки секции 202 получения информации расписания железнодорожного переезда, секции 204 регулирования информации железнодорожного переезда, секции 206 получения информации временного режима смены сигнала, секции 208 регулирования информации светофора, секции 210 приема информации движения, секции 212 регулирования информации автомобиля, секции 214 извлечения, секции 216 управления обеспечением информации и секция 220 тактирования. Однако каждый из функциональных блоков может быть реализован в виде независимой схемы арифметических операций, например, специализированной интегральной схемы (ASIC) или вентильной матрицы, программируемой пользователем (FPGA).
Секция 202 получения информации расписания железнодорожного переезда получает информацию 62 расписания железнодорожного переезда для каждого железнодорожного переезда от центрального устройства 12 управления железнодорожным переездом системы 10 управления железнодорожным переездом. Получение может достигаться за счет разрешения центральному устройству 12 управления железнодорожным переездом произвольно передавать информацию с заданными интервалами передачи, или за счет разрешения центральному устройству 12 управления железнодорожным переездом отвечать на запрос от секции 202 получения информации расписания железнодорожного переезда о передаче информации.
Секция 204 регулирования информации железнодорожного переезда использует регулировочную информацию 310 железнодорожного переезда и регулирует каждый железнодорожный переезд на основании информации 62 расписания железнодорожного переезда, полученной секцией 202 получения информации расписания железнодорожного переезда. На фиг. 13 схематически проиллюстрирован пример регулировочной информации 310 железнодорожного переезда. Согласно фиг. 13, регулировочная информация 310 железнодорожного переезда формируется для каждого железнодорожного переезда и включает в себя, помимо формируемого и обновляемого времени обновления, ID 311 железнодорожного переезда, идентифицирующий соответствующий железнодорожный переезд, положение 312 установки представленное широтой и долготой, текущую ситуацию 313, время 314 начала предупреждения и время 315 окончания предупреждения. Текущая ситуация 313, время 314 начала предупреждения и время 315 окончания предупреждения будут соответственно обновляться, в качестве необходимой основы, до новейших значений на основании полученной информации 62 расписания железнодорожного переезда.
Секция 206 получения информации временного режима смены сигнала получает информацию 64 временного режима смены сигнала для каждого перекрестка от центрального устройства 32 управления светофором системы 30 управления светофором. Получение может достигаться за счет разрешения центральному устройству 32 управления светофором произвольно передавать информацию с заданными интервалами передачи, или за счет разрешения центральному устройству 32 управления светофором отвечать на запрос от секции 206 получения информации временного режима смены сигнала о передаче информации.
Секция 208 регулирования информации светофора использует регулировочную информацию 320 светофора и регулирует каждый перекресток на основании информации 64 временного режима смены сигнала, полученной секцией 206 получения информации временного режима смены сигнала. На фиг. 14 схематически проиллюстрирован пример регулировочной информации 320 светофора. Согласно фиг. 14, регулировочная информация 320 светофора формируется для каждого перекрестка, и включает в себя, помимо формируемых и обновляемого времени обновления, ID 321 перекрестка, идентифицирующий соответствующий перекресток, название 322 перекрестка, положение 323 установки, представленное широтой и долготой, информацию 324 установки сигнального устройства, таблицу 326 этапов представления, текущее состояние 327, параметр 328 управления сигнализацией и информацию 329 времени смены сигнала. Информация 324 установки сигнального устройства представляет информацию, относящуюся к светофорным устройствам, установленным на соответствующем перекрестке, и включает в себя, например, ID сигнальных устройств, идентифицирующие соответствующие светофорные устройства, положения установки, представленные значениями широты и долготы, направления въезда целевых транспортных потоков и отображаемые цвета светофора. Текущее состояние 327 и параметр 328 управления сигнализацией будут соответственно обновляться, в качестве необходимой основы, до новейших значений на основании полученной информации 64 временного режима смены сигнала. Информация 329 времени смены сигнала представляет данные, в которых время смены отображения сигнала и отображение сигнала после смены связаны друг с другом для каждого из светофорных устройств 36, установленных на соответствующем перекрестке IS, и вычисляется на основании таблицы 326 этапов представления и параметра 328 управления сигнализацией (см. фиг. 9 и 10).
Секция 210 приема информации движения принимает информацию 66 движения от бортового устройства 40. Прием может достигаться за счет разрешения бортовому устройству 40 произвольно передавать информацию с заданными интервалами передачи, или за счет разрешения бортовому устройству 40 отвечать на запрос от секции 210 приема информации движения о передаче информации.
Секция 212 регулирования информации автомобиля использует регулировочную информацию 330 автомобиля и регулирует каждый автомобиль на основании информации движения, полученной секцией 210 приема информации движения. На фиг. 15 схематически проиллюстрирован пример регулировочной информации 330 автомобиля. Согласно фиг. 15, регулировочная информация 330 автомобиля формируется для каждого автомобиля, и включает в себя, помимо формируемого и обновляемого времени обновления, ID 331 автомобиля, идентифицирующий соответствующий автомобиль, ID 332 бортового устройства, идентифицирующий установленное бортовое устройство 40, положение 333 движения, скорость 334 перемещения, направление 335 движения, запланированный маршрут 336 движения, флаг 337 автоматического управления и историю 338 обеспечения информации поддержки движения. Положение 333 движения, скорость 334 перемещения, направление 335 движения, запланированный маршрут 336 движения и флаг 337 автоматического управления будут соответственно обновляться, в качестве необходимой основы, до новейших значений на основании полученной информации 66 движения.
Секция 214 извлечения извлекает, на основании информации 66 движения, полученной от бортового устройства 40, железнодорожные переезды RC и перекрестки IS, удовлетворяющие условию дальности обеспечения информации, в качестве целей обеспечения информации 3 поддержки движения на соответствующий автомобиль. Условие дальности обеспечения информации представляет условие на основании положения автомобиля, и может включать в себя, например, «на запланированном маршруте движения для автомобиля», «в пределах заданного расстояния вдоль запланированного маршрута движения от положения автомобиля», “расстояние от положения автомобиля меньше или равно заданному расстоянию” и “расстояние от автомобиля меньше или равно заданному расстоянию, и на запланированном маршруте движения для автомобиля” (см. фиг. 7 и 8).
Секция 214 извлечения может изменять частоту обеспечения информации 3 поддержки движения автомобилю для каждого из железнодорожных переездов RC и перекрестков IS. В этом случае можно определять, удовлетворяется ли частота F обеспечения, указанная в соответствии с расстоянием L от автомобиля до железнодорожного переезда RC или перекрестка IS для каждого из железнодорожных переездов RC и перекрестков IS, удовлетворяющих условию дальности обеспечения информации. Те, которые удовлетворяют условию, могут извлекаться в качестве целей обеспечения (см. фиг. 11A и 11B).
Секция 216 управления обеспечением информации формирует информацию 3 поддержки движения, включающую в себя информацию 5 времени прогнозирования предупреждения, относящуюся к железнодорожным переездам RC, и информацию 7 прогнозирования смены сигнала, относящуюся к перекресткам IS, после извлечения железнодорожных переездов RC и перекрестков IS секцией 214 извлечения, и затем передает информацию 3 поддержки движения на соответствующее бортовое устройство 40. Конкретно, что касается железнодорожного переезда RC, соответствующая регулировочная информация 310 железнодорожного переезда используется для формирования информации времени прогнозирования предупреждения, включающей в себя ID железнодорожного переезда, текущую ситуацию, время начала предупреждения и время окончания предупреждения. Что касается перекрестка IS, соответствующая регулировочная информация 320 светофора используется для формирования информации 7 прогнозирования смены сигнала, включающей в себя ID сигнального устройства и информацию времени смены сигнала.
Секция 216 управления обеспечением информации обеспечивает (и формирует, при необходимости) информацию 3 поддержки движения автомобилю с заданной частотой обеспечения. Однако частота может изменяться. В этом случае заданная частота обеспечения может увеличиваться или уменьшаться в соответствии с определением, запланирован ли маршрут движения автомобиля. Например, когда маршрут движения автомобиля запланирован, частота растет, в отличие от случая, когда маршрут движения автомобиля не запланирован. В противном случае, заданная частота обеспечения может увеличиваться или уменьшаться в соответствии с режим управления автомобилем. Например, когда режим управления автомобилем является «режимом автоматического управления», частота увеличивается, в отличие от случая, когда режим управления автомобилем является «режимом ручного управления».
Секция 220 тактирования включает в себя схему генератора, включающую в себя кварцевый генератор, и измеряет истекшее время от текущего времени или указанного временного режима. Секция 220 тактирования использует временную ошибку, вычисленную секцией 110 приема GNSS для коррекции измеренного текущего времени для обеспечения функции измерения времени с высокой точностью, которая измеряет время с высокой точностью. Функция измерения времени с высокой точностью секции 220 тактирования может не обеспечиваться с использованием сигналов спутников GNSS, но может дополнительно включать в себя приемник стандартной волны, который принимает стандартные волны частотного и временного сигнала для коррекции измеренного текущего времени с использованием стандартной волны, или может использовать абсолютное время, полученное, через секцию 108 связи, из внешней системы, т.е. системы обеспечения информации в абсолютном времени.
Хранилище 300 реализовано запоминающим устройством, например, жестким диском, постоянной памятью (ROM) или оперативной памятью (RAM). В хранилище 300 хранятся программы и данные, например, используемые секцией 200 обработки для объединенного управления системой 1 обеспечения информации. Хранилище 300 используется как рабочая область для секции 200 обработки, и временного хранения результатов арифметических операций, выполняемых в соответствии с различными программами секцией 200 обработки, а также временного хранения данных, например, вводимых через операционную секцию 102 и секцию 108 связи. В настоящем варианте осуществления, в хранилище 300 хранятся программа 302 обеспечения информации, регулировочная информация 310 железнодорожного переезда, регулировочная информация 320 светофора и регулировочная информация 330 автомобиля.
(B) Бортовое устройство 40
На фиг. 16 показана блок–схема, демонстрирующая функциональную конфигурацию бортового устройства 40. Согласно фиг. 16, бортовое устройство 40 включает в себя операционную секцию 502, дисплей 504, секцию 506 вывода звука, секцию 508 связи, секцию 510 приема GNSS, секцию 600 обработки и хранилище 700. Таким образом, бортовое устройство 40 может образовывать компьютерную систему.
Операционная секция 502 реализована устройствами ввода, например, кнопочными переключателями, сенсорной панелью и клавиатурой, и выводит сигнал операции, соответствующий принятой операции, в секцию 600 обработки. Дисплей 504 реализован устройством отображения, например, LCD или сенсорной панелью, и осуществляет различные типы отображения на основании сигнала отображения от секции 600 обработки. Секция 506 вывода звука реализована устройством вывода звука, например, громкоговорителем, и осуществляет различные типы вывода звука на основании звукового сигнала от секции 600 обработки. Секция 508 связи реализована устройством проводной или беспроводной связи, например, соединена с сетью N1 связи, и осуществляет связь с различными типами внешних устройств, например, с системой 1 обеспечения информации.
Секция 510 приема GNSS является приемником GNSS, который принимает сигнал спутника GNSS от спутника G GNSS, осуществляет вычисление местоположения на основании принятого сигнала спутника GNSS, вычисляет положение, представленное широтой, долготой и высотой, а также вычисляет ошибку (временную ошибку) из времени измерения секцией 620 тактирования, и обеспечивает функцию позиционирования.
Секция 600 обработки реализована устройством арифметических операций, например, центральным процессором (CPU), обеспечивает инструкции и переносит данные на компоненты бортового устройства 40 на основании программ и данных, например, хранящихся в хранилище 700, и управляет в целом бортовым устройством 40. Секция 600 обработки выполняет бортовую программу 702, хранящуюся в хранилище 700, чтобы функционировать как соответствующие функциональные блоки секции 602 задания маршрута движения, секции 604 передачи информации движения, секции 606 приема информации поддержки движения, секции 610 управления отображением и секции 620 тактирования. Однако каждый из функциональных блоков может быть реализован в виде независимой схемы арифметических операций, например, специализированной интегральной схемы (ASIC) или вентильной матрицы, программируемой пользователем (FPGA).
Секция 602 задания маршрута движения следует инструкции, введенной через операционную секцию 502, для задания запланированного маршрута движения от текущего положения автомобиля в предписанный пункт назначения. Данные, относящиеся к заданному, запланированному маршруту движения, сохраняются как информация 720 запланированного маршрута движения в хранилище 700.
Секция 604 передачи информации движения формирует и передает в систему 1 обеспечения информации информацию 66 движения, включающую в себя положение 712 движения, скорость 714 перемещения и направление 716 движения, хранящееся в хранилище 700, а также включающую в себя запланированный маршрут движения, указанный информацией 720 запланированного маршрута движения, и флаг автоматического управления, указанный режимом 718 управления.
Секция 606 приема информации поддержки движения принимает информацию 3 поддержки движения от системы 1 обеспечения информации. Принятая информация 3 поддержки движения сохраняется как новейшая информация 722 поддержки движения в хранилище 700. Информация 3 поддержки движения, принятая ранее, накапливается и сохраняется в порядке приема, например, как история 724 приема, в хранилище 700. В случае, когда режим управления автомобиля является «режимом автоматического управления», принятая информация 3 поддержки движения выводится на устройство 800 автоматического управления, установленное на автомобиле. Текущее состояние железнодорожного переезда, включенное в информацию 5 времени прогнозирования предупреждения информации 3 поддержки движения, включает в себя время остановки выдачи предыдущего предупреждения, на железнодорожном переезде (см. фиг. 6). Таким образом, в режиме автоматического управления, устройство 800 автоматического управления может знать, когда останавливается выдача предупреждения на железнодорожном переезде, позволяющая останавливать автомобиль перед железнодорожным переездом, чтобы безопасно начать движение и пересечь железнодорожный переезд.
Секция 610 управления отображением предписывает навигационному экрану W, отображаемому на дисплее 504, отображать отображение E1 текущего времени и отображение E3 карты, а также отображать отображение E5 поддержки движения на основании новейшей информации 722 поддержки движения. Конкретно, когда отображение E5 поддержки движения указывает железнодорожный переезд непосредственно перед автомобилем, движущимся в направлении движения вдоль запланированного маршрута движения, отображается отображение состояния железнодорожного переезда на основании информации 5 времени прогнозирования предупреждения (см. фиг. 2A и 2B). Когда отображение E5 поддержки движения указывает перекресток непосредственно перед автомобилем, движущимся в направлении движения вдоль запланированного маршрута движения, отображается отображение состояния сигнала на основании информации 7 прогнозирования смены сигнала (см. фиг. 3). Отображение E3 карты может отображаться с обращением к DB 710 карты, включающей в себя железнодорожные переезды и перекрестки.
Секция 610 управления отображением включает в себя секцию 612 управления отображением прогнозирования, секцию 614 управления отображением пиктограмм идентификации и секцию 616 управления отображением подробностей.
При выборе пиктограммы D3 отображения прогнозирования, обеспеченной на навигационном экране W, отображаемом с отображением E5 поддержки движения, секция 612 управления отображением прогнозирования переключает отображение E5 поддержки движения на отображение прогнозирования, указывающий состояния железнодорожных переездов и перекрестков в спрогнозированное время прибытия автомобиля (см. фиг. 5). Таким образом, заданные номера железнодорожных переездов и перекрестков на запланированном маршруте движения выбираются в порядке прибытия от текущего положения автомобиля. Для выбранных железнодорожных переездов и перекрестков, соответственно, прогнозируемое время прибытия вычисляется на основании расстояний согласно запланированному маршруту движения. Затем, в отношении железнодорожных переездов, информация 5 времени прогнозирования предупреждения используется для определения состояний (выдано ли предупреждение) в прогнозируемое время прибытия. В отношении перекрестков, информация 7 прогнозирования смены сигнала используется для определения состояний (отображений сигнала) в прогнозируемое время прибытия.
Секция 614 управления отображением пиктограмм идентификации выбирает, из железнодорожных переездов и перекрестков, включенных в карту, отображаемую на отображении E3 карты на навигационном экране W, железнодорожные переезды и перекрестки, информация о которых включена в информацию 5 времени прогнозирования предупреждения и информацию 7 прогнозирования смены сигнала в новейшей информации 722 поддержки движения, и отображает пиктограммы D7 идентификации на выбранных железнодорожных переездах и перекрестках (см. фиг. 3 и 4).
При выборе одной из пиктограмм D7 идентификации, отображаемых секцией 614 управления отображением пиктограмм идентификации, секция 616 управления отображением подробностей переключает отображение E5 поддержки движения на отображение подробностей железнодорожного переезда или перекрестка, соответствующего выбранной пиктограмме D7 идентификации (см. фиг. 4).
Секция 620 тактирования включает в себя схему генератора, включающую в себя кварцевый генератор, и измеряет истекшее время от текущего времени или указанного временного режима. Секция 620 тактирования использует временную ошибку, вычисленную секцией 510 приема GNSS для коррекции измеренного текущего времени для обеспечения функции измерения времени с высокой точностью, которая измеряет время с высокой точностью. Функция измерения времени с высокой точностью секции 620 тактирования может не обеспечиваться с использованием сигналов спутников GNSS, но может дополнительно включать в себя приемник стандартной волны, который принимает стандартные волны частотного и временного сигнала для коррекции измеренного текущего времени с использованием стандартной волны, или может использовать абсолютное время, полученное, через секцию 508 связи, из внешней системы, т.е. системы обеспечения информации в абсолютном времени.
Хранилище 700 реализовано запоминающим устройством, например, жестким диском, ROM или RAM. В хранилище 700 хранятся программы и данные, например, используемые секцией 600 обработки для объединенного управления бортовым устройством 40. Хранилище 700 используется как рабочая область для секции 600 обработки и временного хранения результатов арифметических операций, выполняемых в соответствии с различными программами секцией 600 обработки, а также временного хранения данных, например, вводимых через операционную секцию 502 и секцию 508 связи. В настоящем варианте осуществления, в хранилище 700 хранятся бортовая программа 702, DB 710 карты, положение 712 движения, скорость 714 перемещения, направление 716 движения, режим 718 управления, указывающий, осуществляется ли управление автомобилем в ручном режиме или автоматическом режиме, информация 720 запланированного маршрута движения, новейшая информация 722 поддержки движения и история 724 приема информации 3 поддержки движения.
Положение 712 движения, скорость 714 перемещения и направление 715 движения может вычислять, например, секция 510 приема GNSS посредством вычисления местоположения.
Последовательность операций процесса
(A) Система 1 обеспечения информации
На фиг. 17 показана блок–схема, демонстрирующая последовательность операций процесса в системе 1 обеспечения информации. Когда секция 202 получения информации расписания железнодорожного переезда принимает информацию 62 расписания железнодорожного переезда от центрального устройства 12 управления железнодорожным переездом (этап S1: Да), секция 204 регулирования информации железнодорожного переезда сначала обновляет регулировочную информацию 320 светофора для соответствующего железнодорожного переезда на основании принятой информации 62 расписания железнодорожного переезда (этап S3). Когда секция 206 получения информации временного режима смены сигнала принимает информацию 64 временного режима смены сигнала от центрального устройства 32 управления светофором (этап S5: Да), секция 208 регулирования информации светофора формирует информацию 329 времени смены сигнала для соответствующего перекрестка и обновляет регулировочную информацию 320 светофора для соответствующего перекрестка, на основании принятой информации 64 временного режима смены сигнала (этап S7). Когда секция 210 приема информации движения принимает информацию 66 движения от бортового устройства 40 (этап S9: Да), секция 212 регулирования информации автомобиля обновляет регулировочную информацию 330 автомобиля для соответствующего автомобиля на основании принятой информации 66 движения (этап S11).
Затем осуществляется повторяющийся процесс, предназначенный для каждого автомобиля (цикл A). Таким образом, сначала определяется, превышает ли время, прошедшее до текущего времени от непосредственно предшествующего времени обеспечения информации поддержки движения целевому автомобилю, заданный интервал времени обеспечения. В случае превышения интервала времени обеспечения (этап S13: Да), секция 214 извлечения извлекает, в качестве целей обеспечения информации поддержки движения, железнодорожные переезды и перекрестки, удовлетворяющие условию дальности до цели обеспечения информации на основании положения целевого автомобиля (этап S15). Затем секция 216 управления обеспечением информации формирует информацию 3 поддержки движения, включающую в себя информацию, относящуюся к извлеченным железнодорожным переездам и извлеченному перекрестку, соответственно, на основании новейшей информации 722 поддержки движения (этап S17), и передает сгенерированную информацию 3 поддержки движения на бортовое устройство 40 целевого автомобиля (этап S19). Повторяющийся процесс цикла A осуществляется, как описано выше. По завершении повторяющихся процессов цикла A предназначенных для всех автомобилей, тот же процесс снова осуществляется от этапа S1.
(B) Бортовое устройство 40
На фиг. 18 показана блок–схема, демонстрирующая последовательность операций процесса в бортовом устройстве 40. Сначала секция 604 передачи информации движения формирует информацию 66 движения, включающую в себя текущее положение движения, скорость перемещения, направление движения, запланированный маршрут движения и флаг автоматического управления самого автомобиля (этап S31), и затем передает сформированную информацию 66 движения в систему 1 обеспечения информации (этап S33).
Когда секция 606 приема информации поддержки движения принимает информацию 3 поддержки движения от системы 1 обеспечения информации (этап S35: Да), обновление осуществляется с использованием принятой информации 3 поддержки движения, и обновленная информация сохраняется как новейшая информация 722 поддержки движения (этап S37). Затем секция 610 управления отображением обновляет отображение E5 поддержки движения, отображаемый на навигационном экране W на основании принятой информации 3 поддержки движения (этап S39). Когда режим управления автомобиля является «режимом автоматического управления» (этап S41: Да), принятая информация 3 поддержки движения выводится на устройство 800 автоматического управления, установленное на автомобиле (этап S43).
Затем, при выборе пиктограммы D3 отображения прогнозирования, когда отображение E5 поддержки движения на навигационном экране W является отображением текущей ситуации (этап S45: Да), секция 612 управления отображением прогнозирования переключает отображение E5 поддержки движения на отображение прогнозирования, указывающее состояния железнодорожных переездов и перекрестков в спрогнозированное время прибытия автомобиля на основании новейшей информации 722 поддержки движения (этап S47).
При выборе пиктограммы D5 отображения текущей ситуации, когда отображение E5 поддержки движения на навигационном экране W является отображением прогнозирования (этап S49: Да), секция 610 управления отображением переключает отображение E5 поддержки движения на отображение текущей ситуации, указывающий состояния железнодорожных переездов и перекрестков в текущее время прибытия автомобиля на основании новейшей информации 722 поддержки движения (этап S51).
При выборе пиктограммы D7 идентификации на отображении E3 карты, когда отображение E5 поддержки движения на навигационном экране W является отображением текущей ситуации (этап S53: Да), секция 616 управления отображением подробностей переключает отображение E5 поддержки движения на отображение подробностей железнодорожного переезда или перекрестка соответствующего выбранной пиктограмме D7 идентификации на основании новейшей информации 722 поддержки движения (этап S55). По завершении вышеописанного процесса тот же процесс осуществляется снова от этапа S31.
Работа и результат
Согласно настоящему варианту осуществления, как описано выше, можно обеспечить систему 1 обеспечения информации, которая обеспечивает информация 3 поддержки движения, включающая в себя необходимую информацию, относящуюся к железнодорожным переездам и светофорам на перекрестках, когда автомобиль движется. Информация, относящаяся к железнодорожным переездам, базируется на информации, полученной от системы 10 управления железнодорожным переездом. Информация, относящаяся к светофорам, базируется на информации, полученной от системы 30 управления светофором. Информация 3 поддержки движения таким образом, образует точную информацию.
Время начала предупреждения, включенное в информацию, поступающую от системы 10 управления железнодорожным переездом, может надлежащим образом изменяться в соответствии с положением движения поезда. Поскольку поезда используются в принципе на одноразовой основе, время начала предупреждения задерживается, в принципе, даже когда время начала предупреждения изменяется. Таким образом, время начала предупреждения, вычисленное для одного предупреждения на железнодорожном переезде, не становится более ранним, но становится задержанным в принципе. Даже когда нарушение связи или задержка связи происходит в сети N1 связи между системой 1 обеспечения информации и системой 10 управления железнодорожным переездом или в сети N2 связи между системой 1 обеспечения информации и бортовым устройством 40, например, с использованием уже полученной информации, таким образом, оставляет всю операцию на безопасной стороне, позволяя автомобилю безопасно перемещаться.
Информация, включенная в информацию 3 поддержки движения, представляет информацию, относящуюся к железнодорожным переездам и перекресткам, которые удовлетворяют условию дальности обеспечения информации, на основании положения автомобиля. Таким образом, автомобиль может выбирать, без выборки информации всех железнодорожных переездов и перекрестков, необходимая информация, относящаяся к железнодорожным переездам и светофорам в ходе перемещения в качестве необходимой основы, например, железнодорожным переездам и перекресткам, «расположенным рядом» с текущим положением.
Информация, относящаяся к железнодорожным переездам, которая включена в информацию 3 поддержки движения, представляет информацию времени прогнозирования предупреждения. Информация, относящаяся к перекресткам представляет информацию прогнозирования смены сигнала. Таким образом, автомобиль может заранее выбирать и распознавать информацию, полезную при движении автомобиля, например, порядок смены и время смены, прогнозируемое в отношении железнодорожных переездов и светофоров на перекрестках, состояния которых изменяются от момента к моменту.
Система 10 управления железнодорожным переездом и система 30 управления светофором, соответственно, включают в себя устройства измерения времени с высокой точностью. Время, включенное в информацию, обеспечиваемую системами таким образом, представляет время в соответствии с информацией времени высокой точности. Бортовое устройство 40 автомобиля аналогичным образом включает в себя функцию измерения времени с высокой точностью. Таким образом, можно точно синхронизировать время между системами и автомобилем, позволяя обеспечить безопасное автоматическое управление автомобилем.
Аспекты настоящего изобретения не ограничиваются вышеописанными вариантами осуществления. Возможны различные модификации и вариации, не выходящие за рамки заявленного изобретения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 – система обеспечения информации
3 – информация поддержки движения
10 – система управления железнодорожным переездом
12 – центральное устройство управления железнодорожным переездом
14 – контроллер железнодорожного переезда
16 – дорожное предупреждающее устройство
18 – железнодорожный шлагбаум
RC – железнодорожный переезд
30 – система управления светофором
32 – центральное устройство управления светофором
34 – контроллер сигнализации
36 – светофорное устройство
IS – перекресток
40 – бортовое устройство
42 – автомобиль
44 – запланированный маршрут движения
62 – информация расписания железнодорожного переезда
64 – информация временного режима смены сигнала
66 – информация движения
N1 – N4 – сеть связи
G – спутник GNSS
W1 – W9 – навигационный экран
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОТОБРАЖЕНИЯ РЕКЛАМЫ | 2009 |
|
RU2478231C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА ПО НЕКОДИРУЕМЫМ СТАНЦИОННЫМ ПУТЯМ И СИСТЕМА ДЛЯ ЕГО ИСПОЛЬЗОВАНИЯ | 2012 |
|
RU2497703C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| СВЕТОФОР ПЕШЕХОДНЫЙ | 2004 |
|
RU2266570C1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПОТОКАМИ | 2004 |
|
RU2269820C2 |
| Способ дополнительной индикации и управления движением | 2017 |
|
RU2676593C2 |
| УСТРОЙСТВО ВЫЧИСЛЕНИЯ МАРШРУТА ДВИЖЕНИЯ | 2014 |
|
RU2661963C1 |
| СИСТЕМА КОНТРОЛЯ СОБЛЮДЕНИЯ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2007 |
|
RU2384887C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2801076C2 |
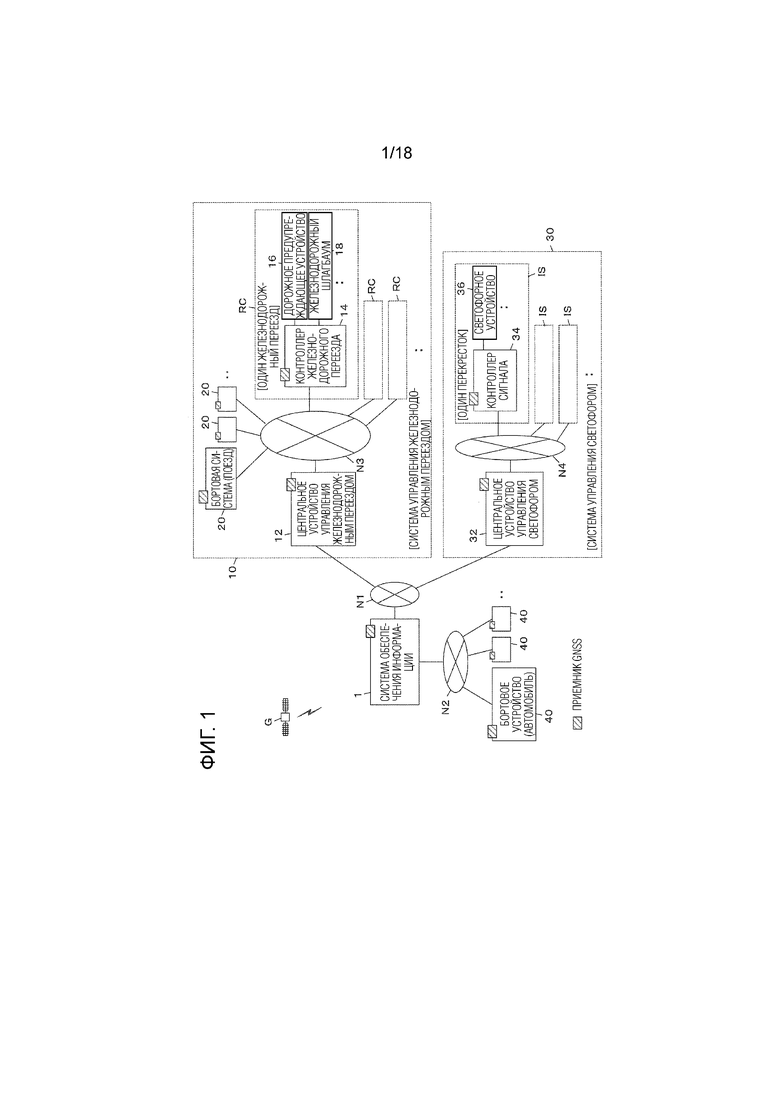
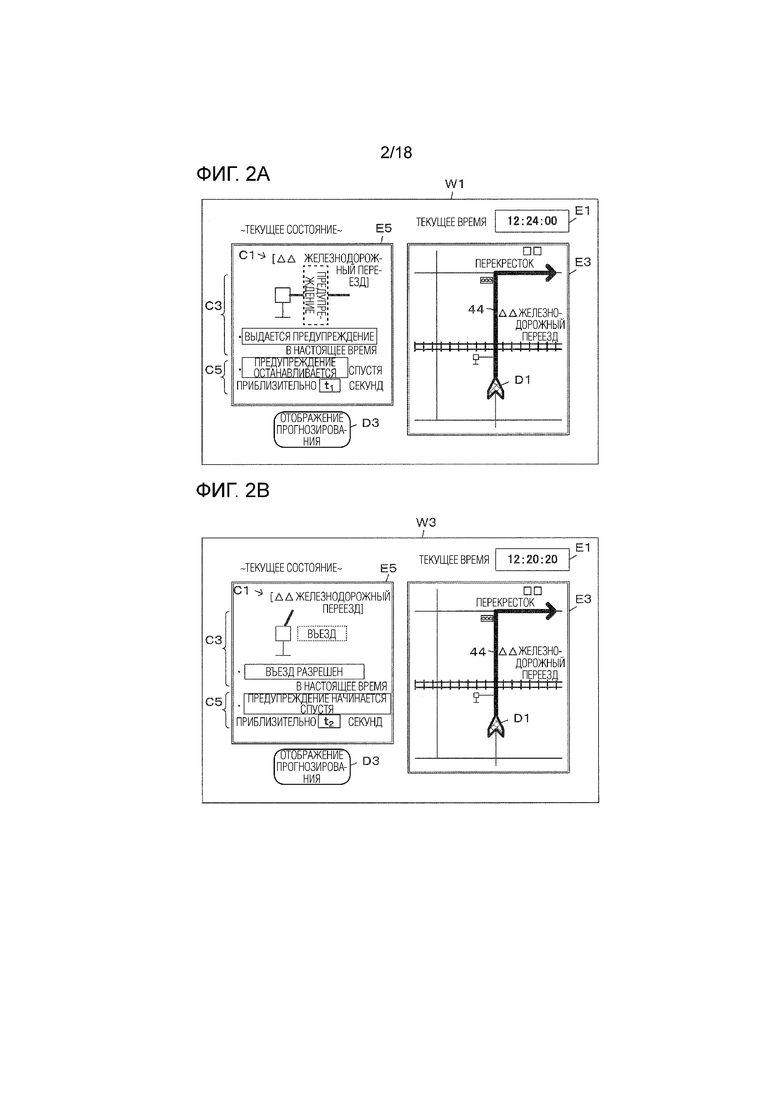
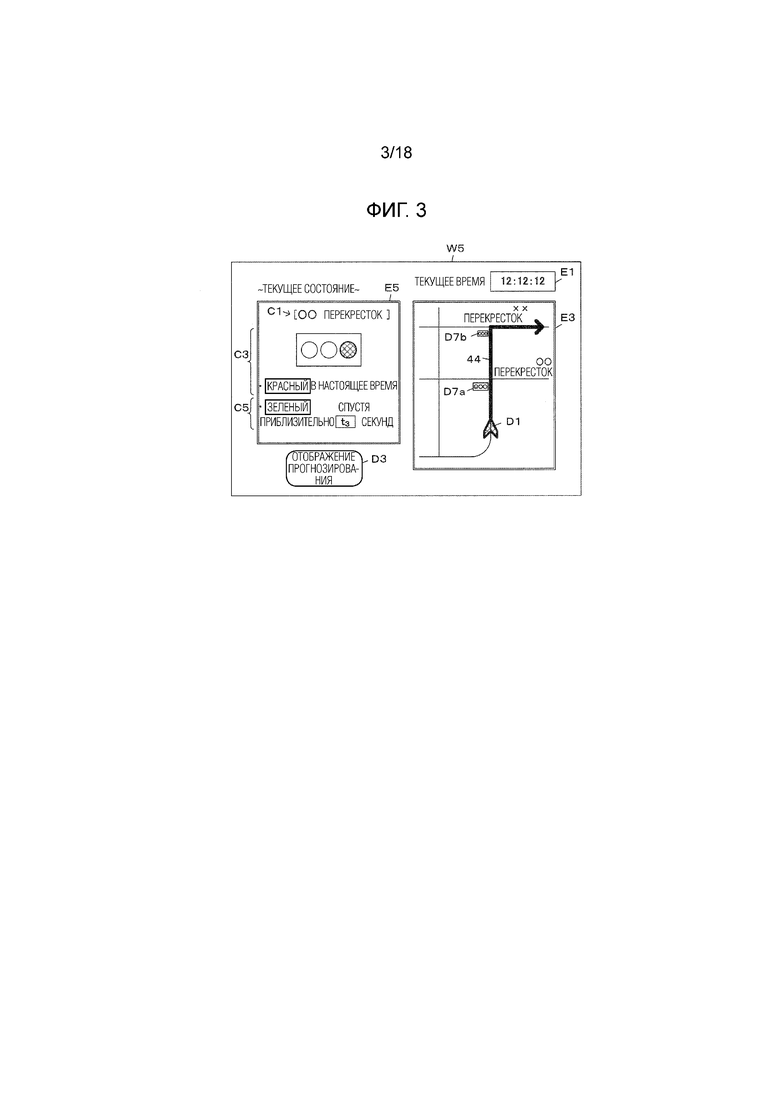
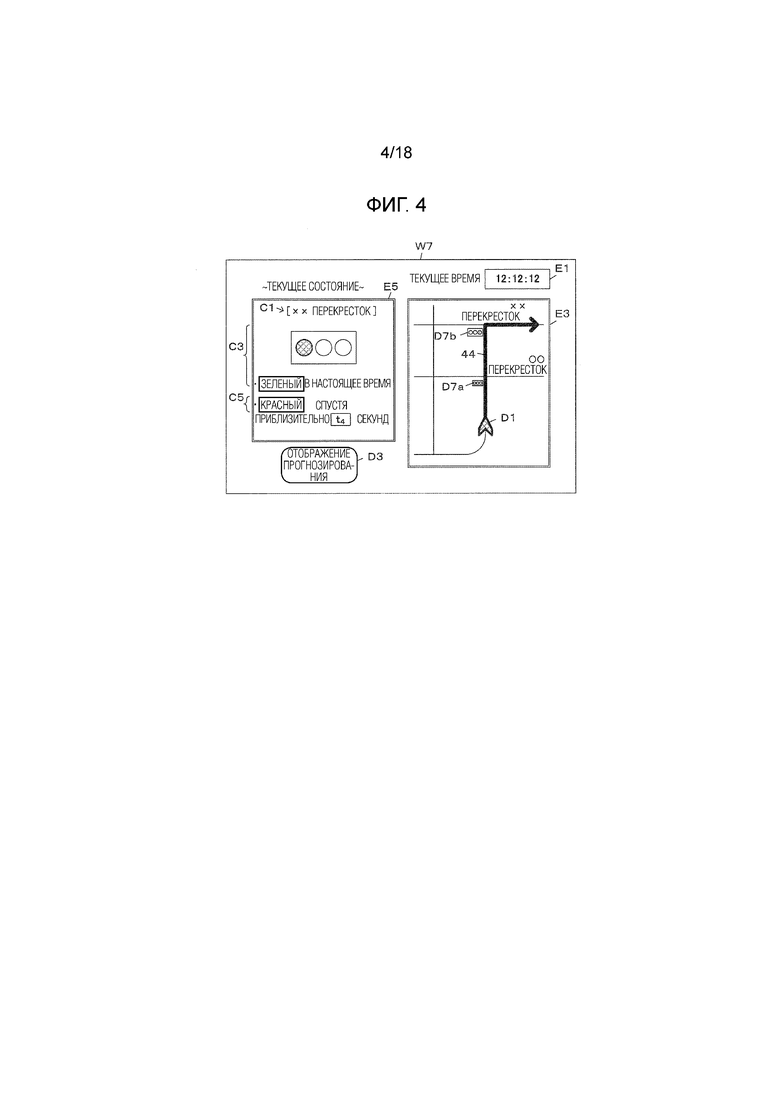
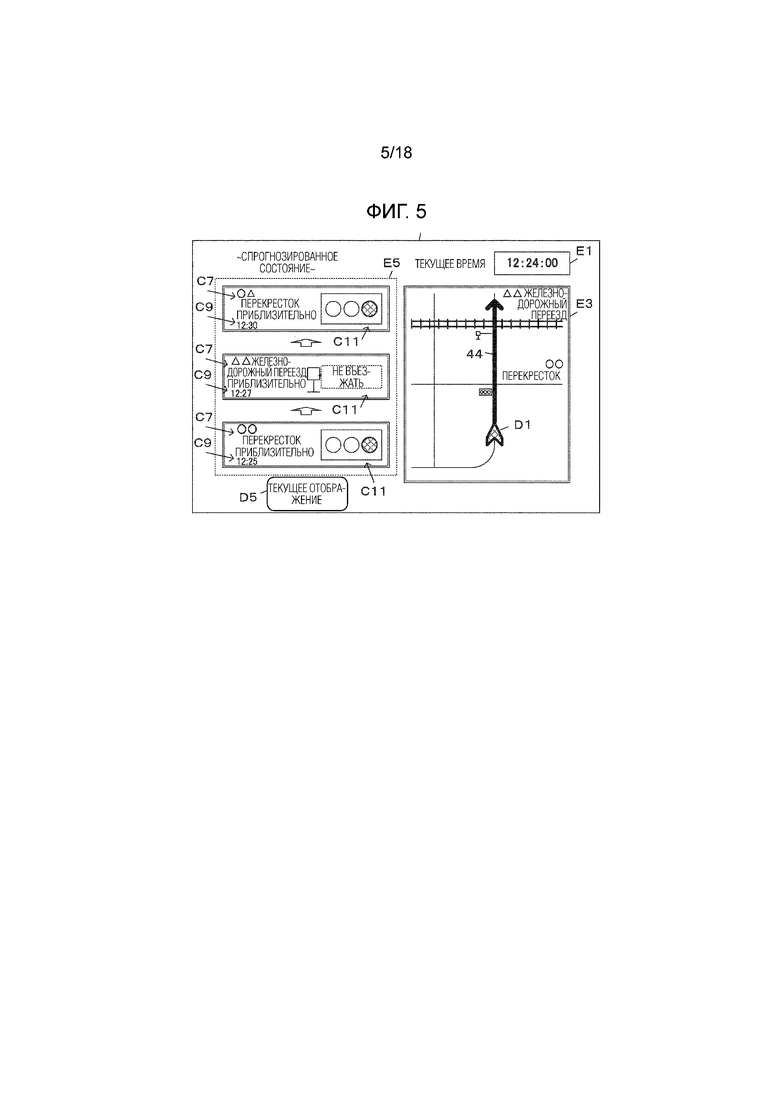
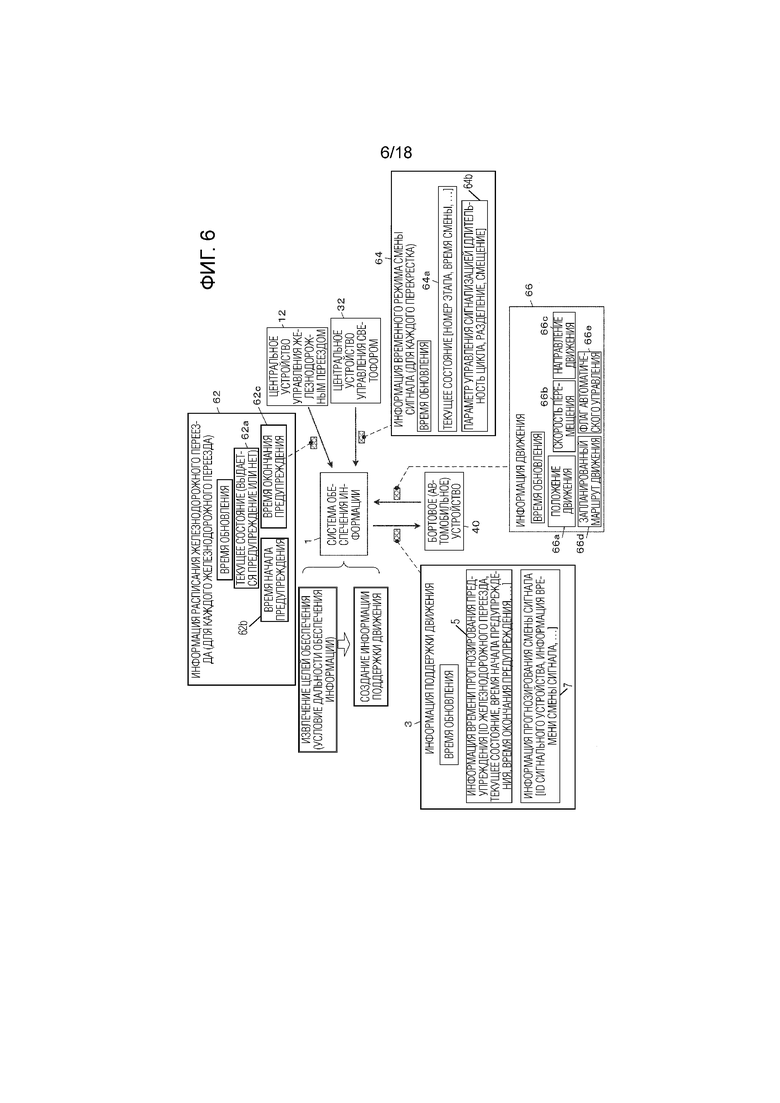
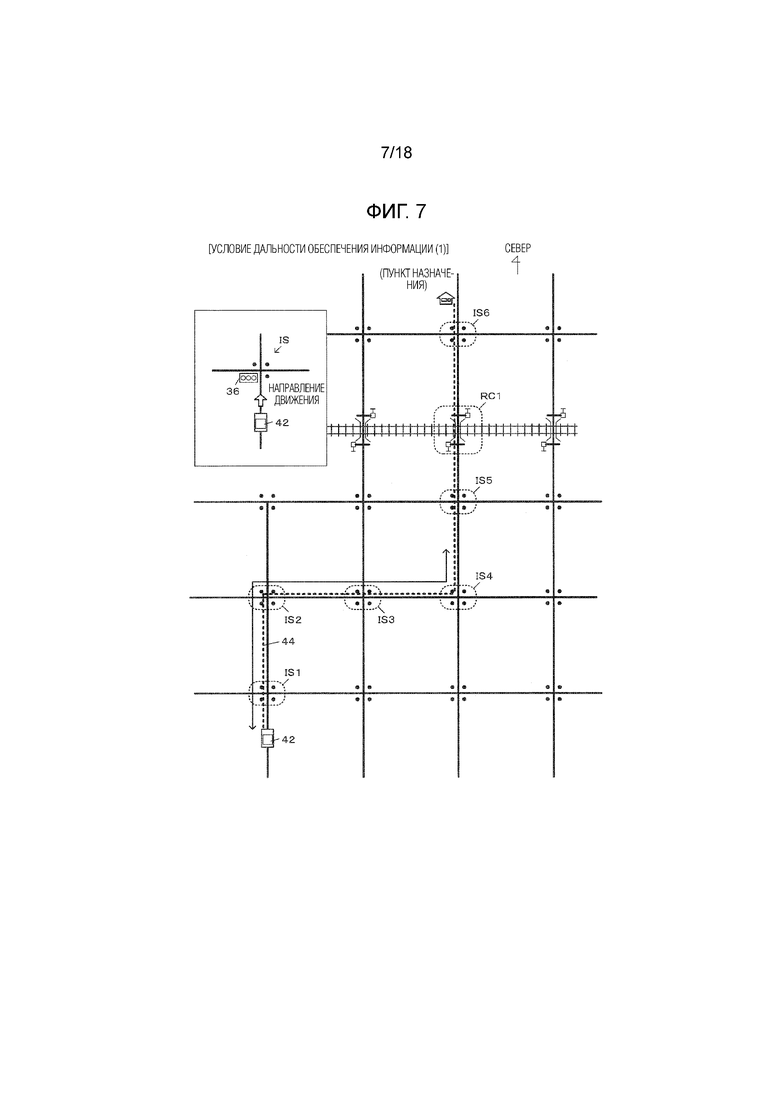
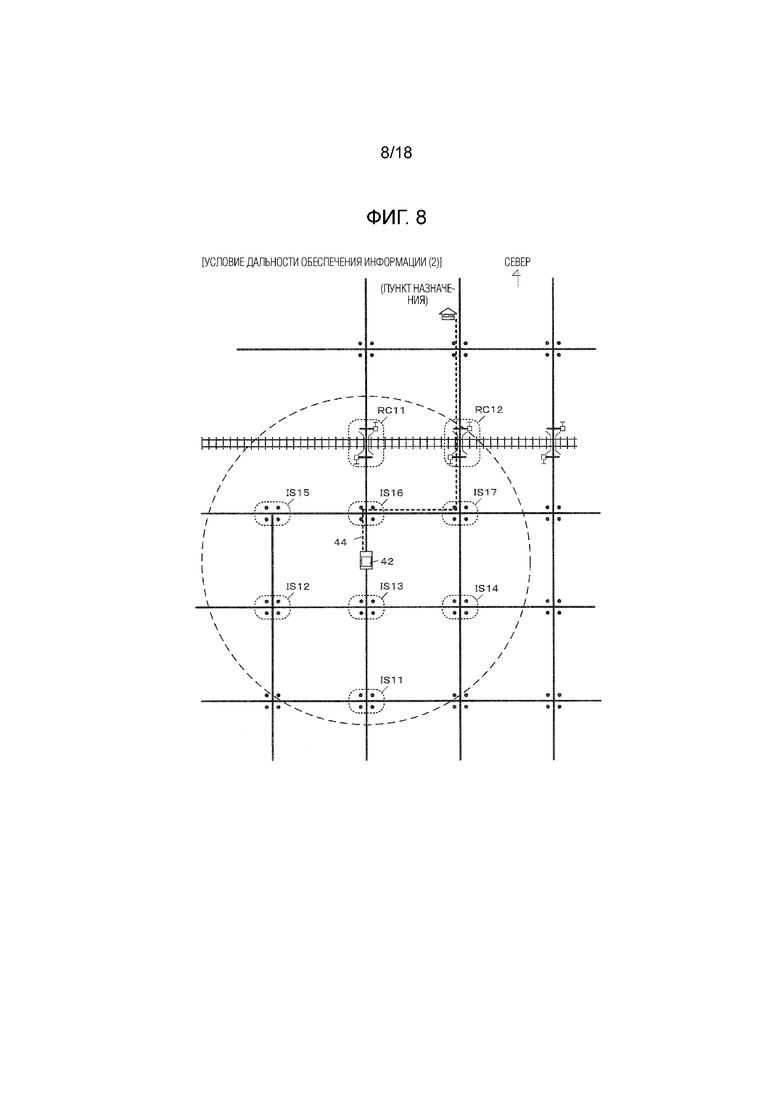
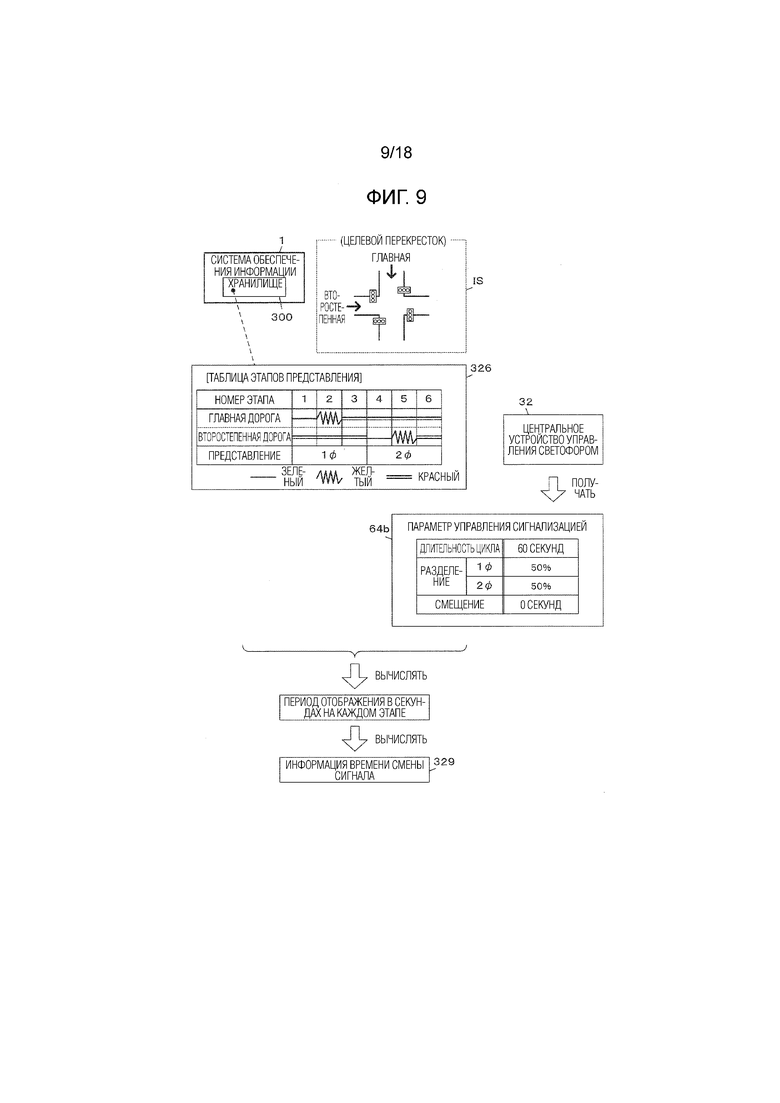
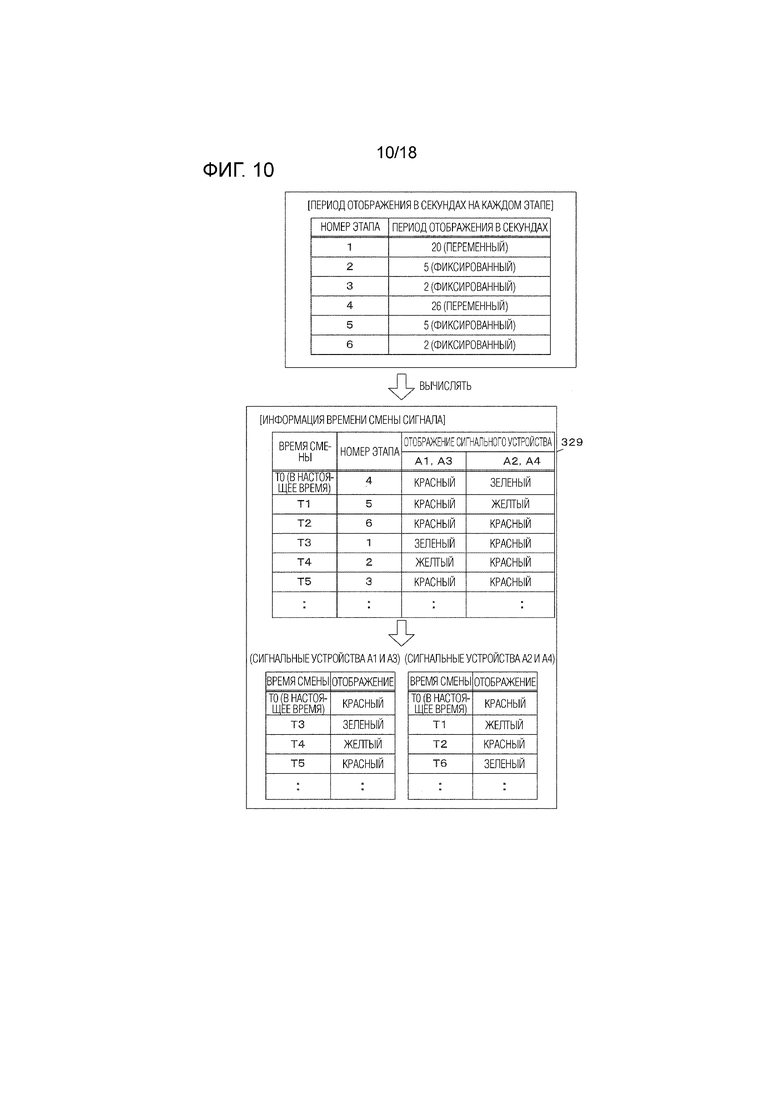
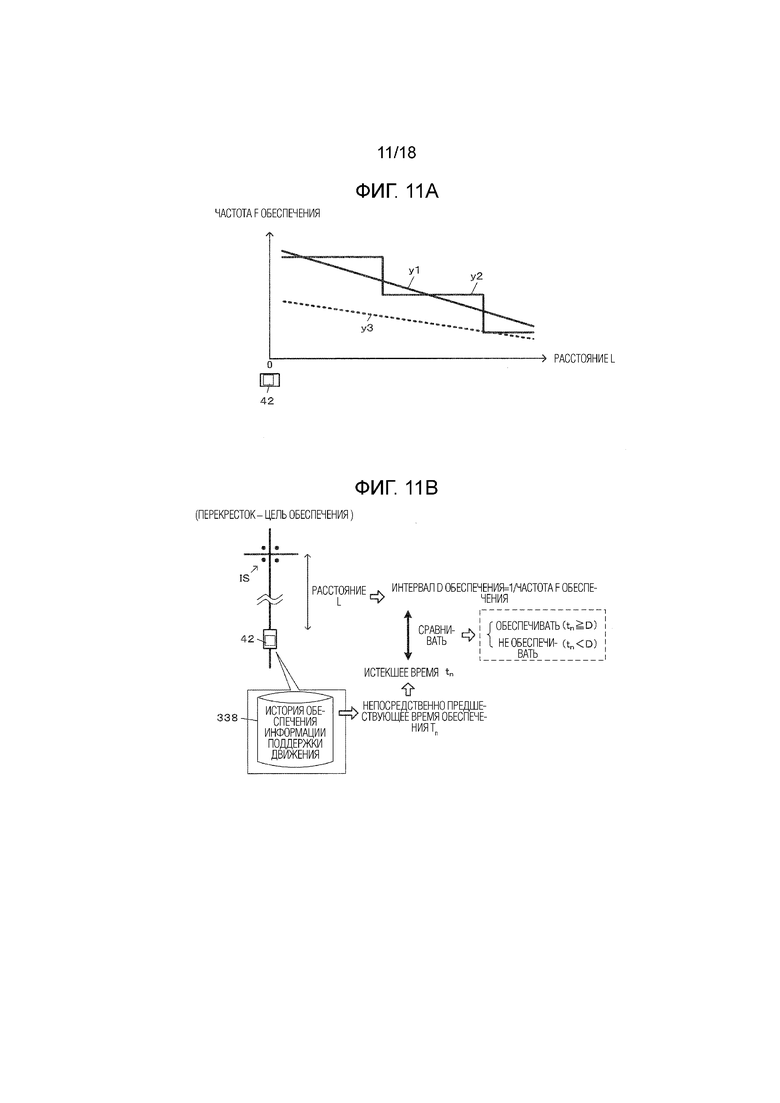
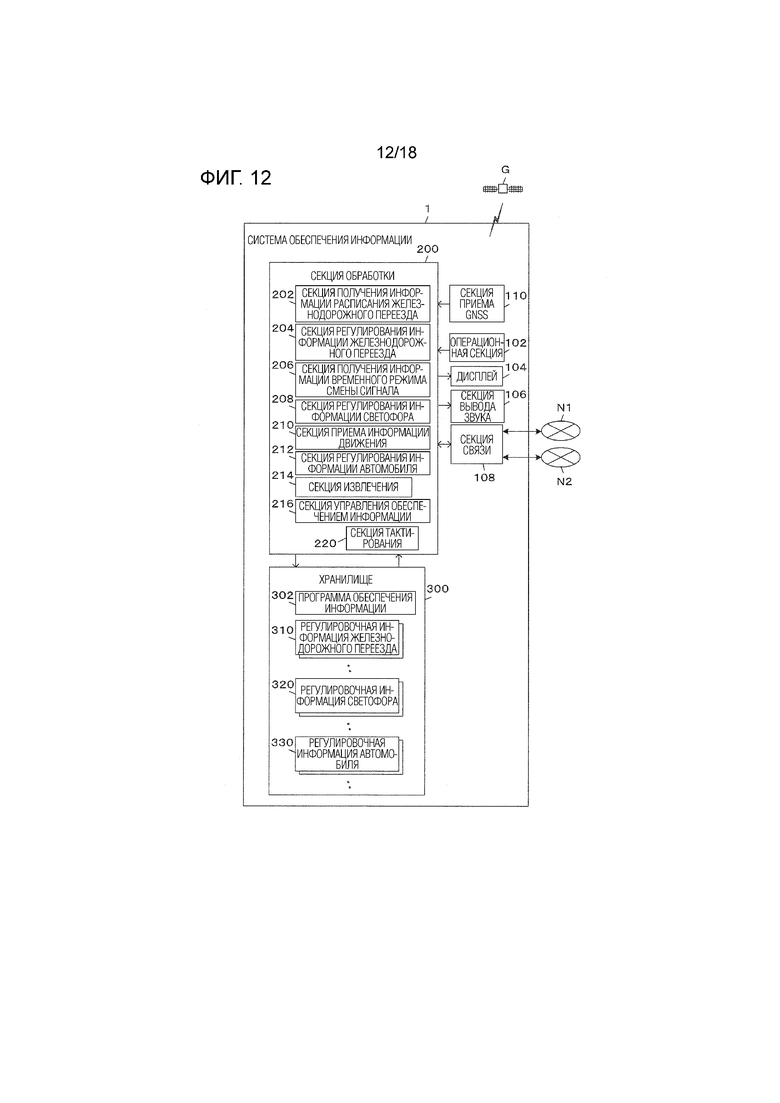
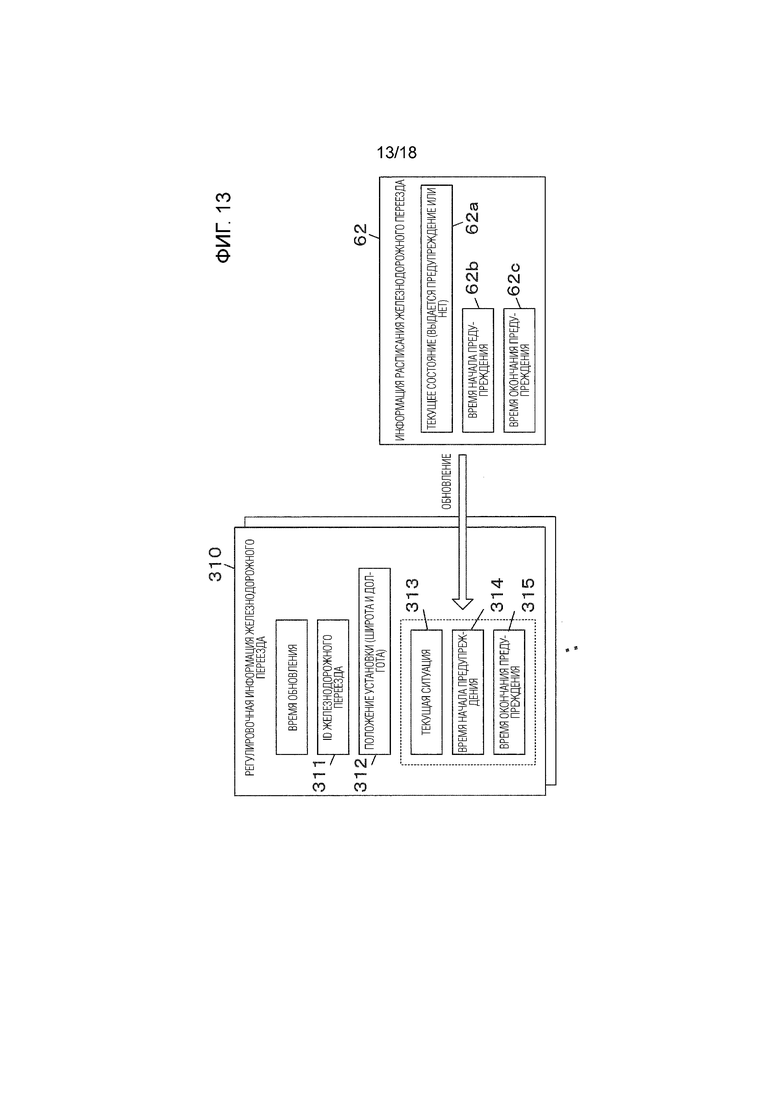
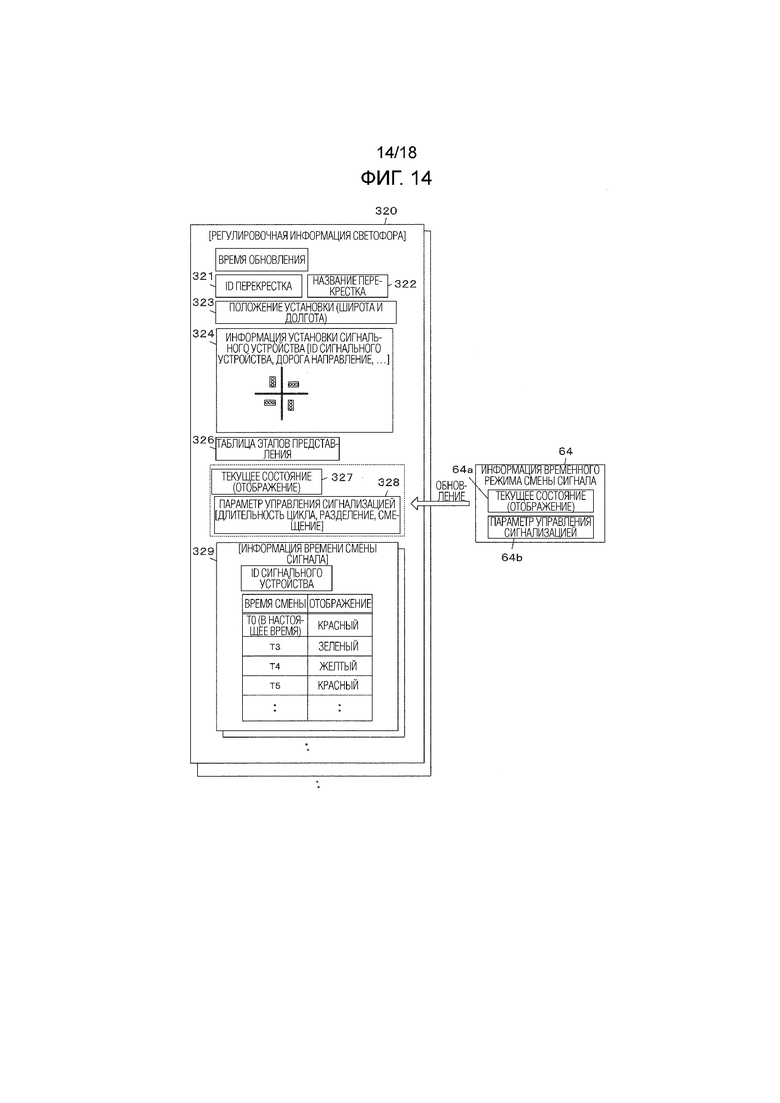
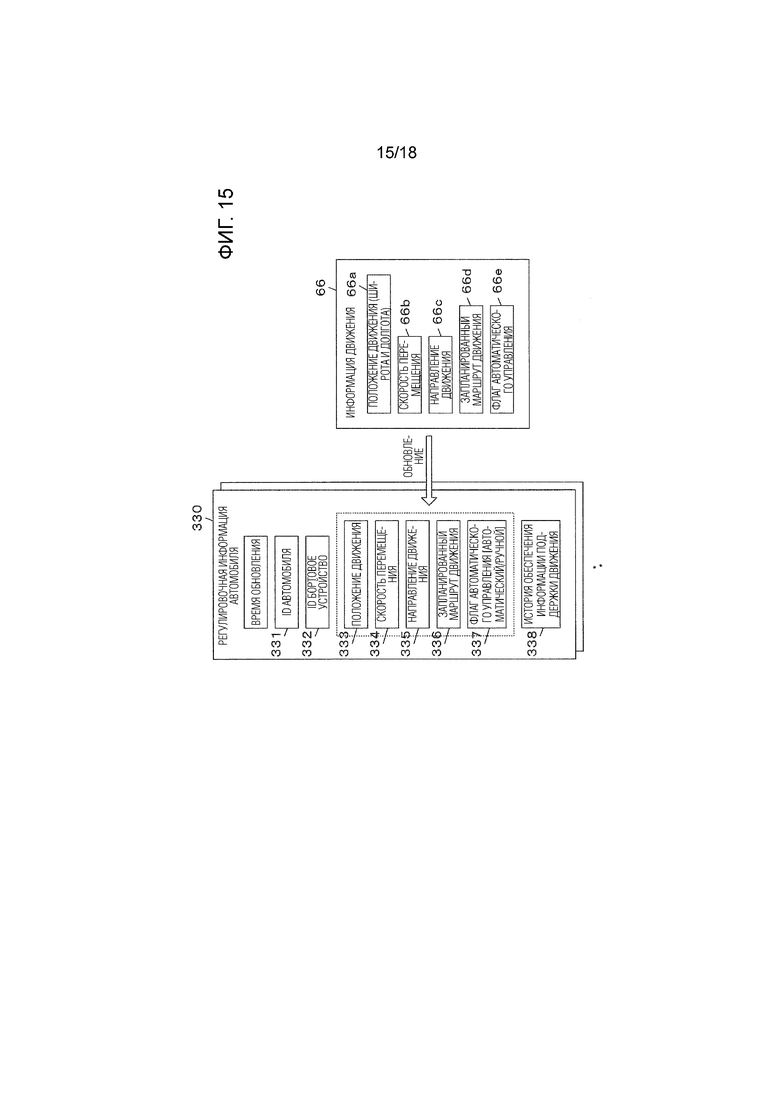
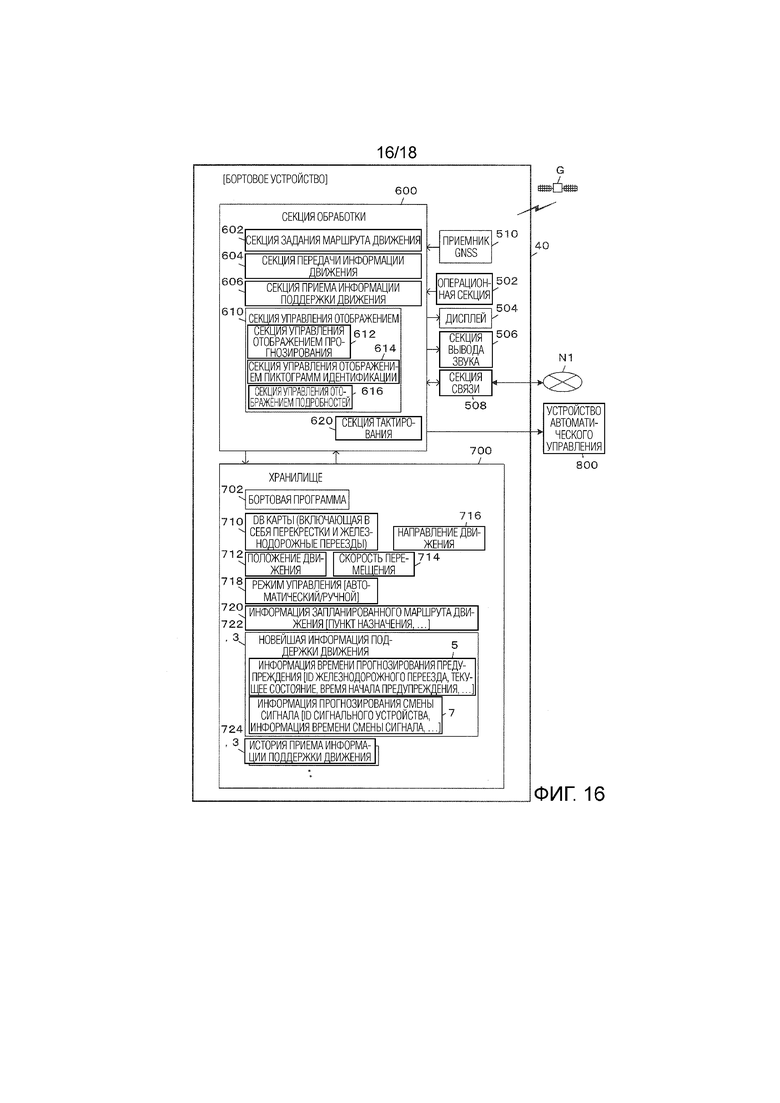
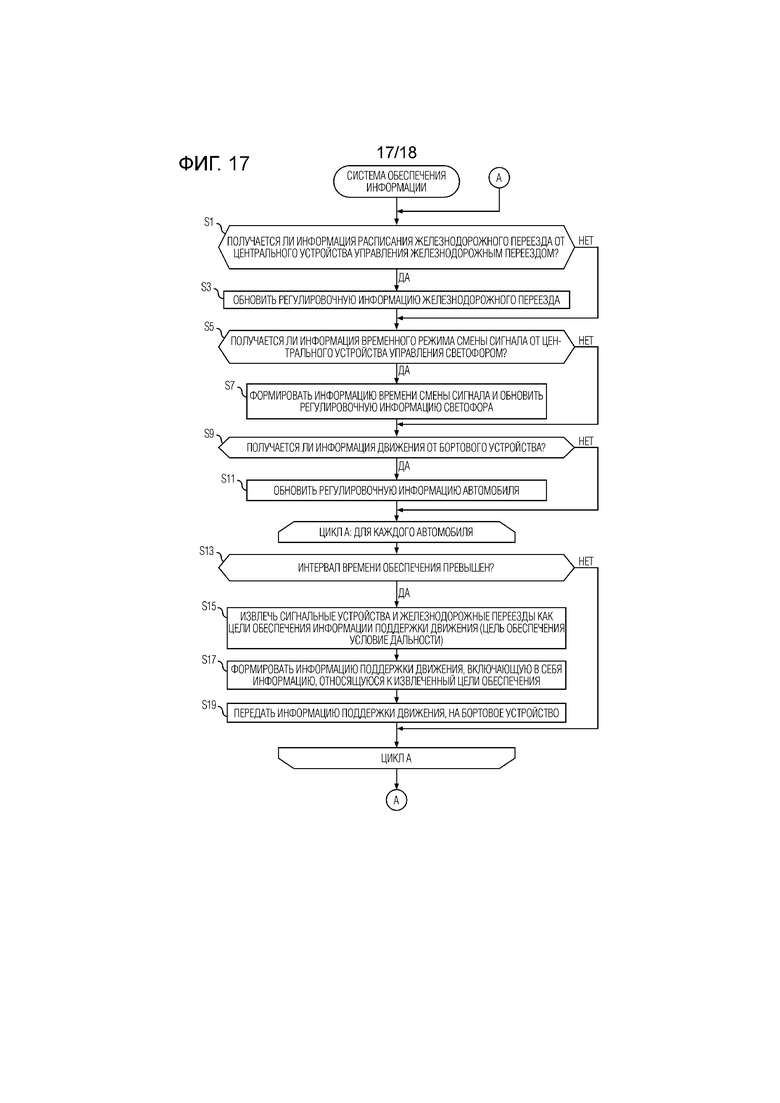
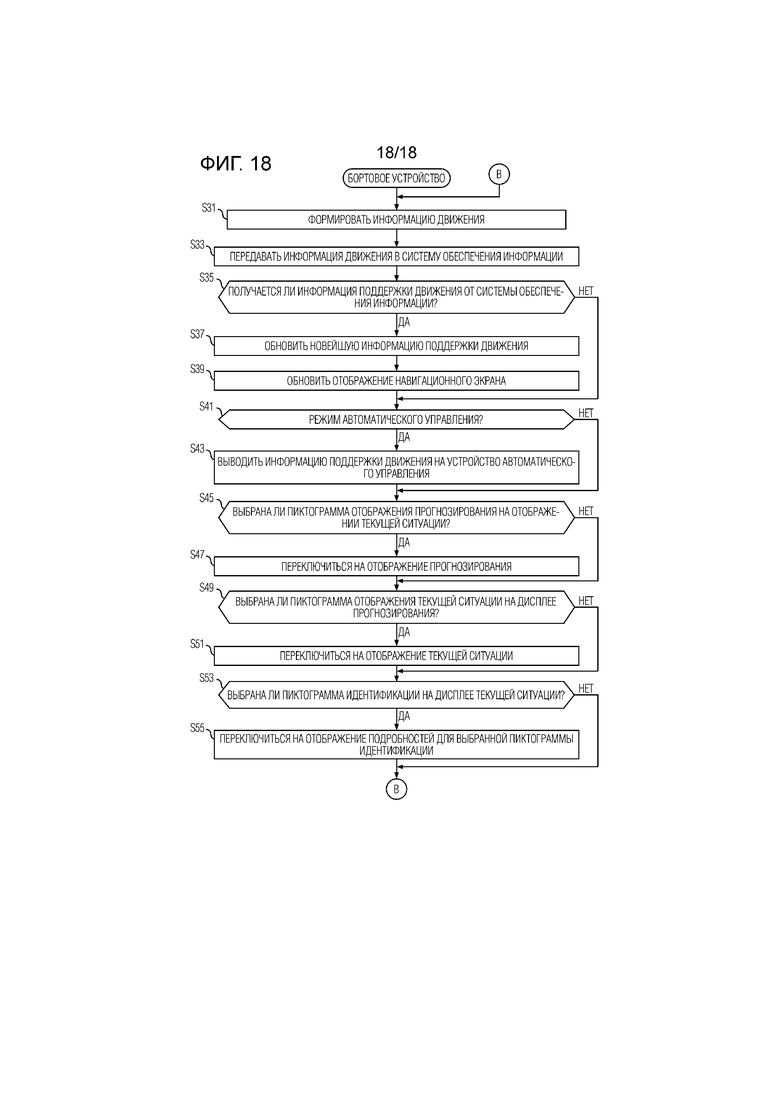
Техническое решение относится к средствам регулирования движения транспорта. Система (1) предоставления информации получает информацию (62) расписания переезда через железную дорогу, которая является информацией времени прогнозирования предупреждения о переезде через железную дорогу на основе точного времени каждого переезда от центрального устройства (12) управления переездом через систему (10) управления переездом, получает информацию о времени изменения сигнала на основе точного времени каждого перекрестка от центрального устройства (32) управления сигналами дорожного движения системы (30) управления сигналами дорожного движения. Затем система предоставления информации (1) выбирает железнодорожный переезд и перекресток, которые удовлетворяют заданному условию диапазона предоставления информации на основе местоположения автомобиля, генерирует информацию (3) поддержки движения, включая: информацию (5) о времени прогнозирования предупреждения, относящуюся к выбранному железнодорожному переезду; и информацию (7) прогнозирования смены сигнала, относящуюся к выбранному перекрестку, и передает информацию на бортовое устройство (40) автомобиля. Достигается повышение безопасности движения транспорта. Техническое решение относится к средствам регулирования движения транспорта. 2 н. и 9 з.п. ф-лы, 20 ил.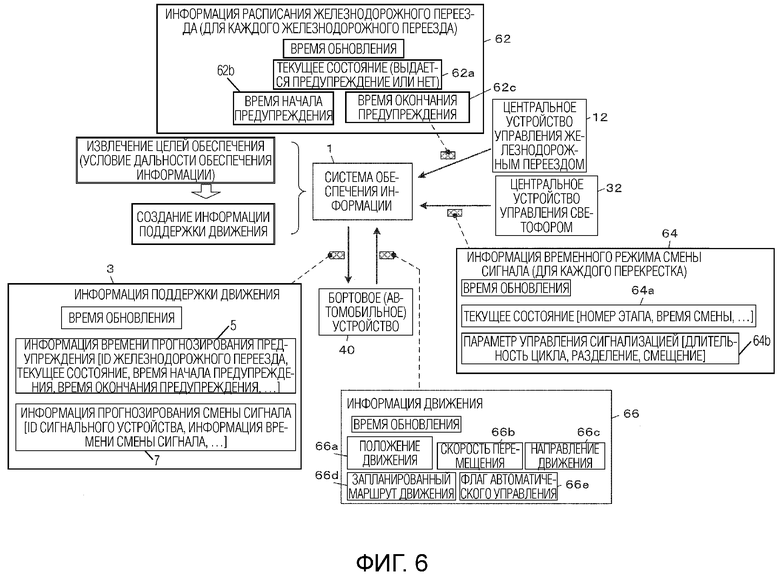
1. Система обеспечения информации, которая осуществляет связь с системой управления железнодорожным переездом и системой управления светофором для обеспечения информации поддержки движения автомобилю, причем каждая из системы управления железнодорожным переездом и системы управления светофором включает в себя функцию измерения времени с высокой точностью, которая принимает спутниковые сигналы от спутника системы глобальной спутниковой навигации (GNSS), принимает стандартную волну, или осуществляет связь с системой обеспечения информации в абсолютном времени для измерения времени с высокой точностью, причем автомобиль включает в себя функцию позиционирования, которая принимает спутниковые сигналы от спутника GNSS для осуществления позиционирования, причем система обеспечения информации содержит: блок получения информации расписания железнодорожного переезда, который получает от системы управления железнодорожным переездом информацию расписания железнодорожного переезда, представляющую расписание времени прогнозирования предупреждения железнодорожного переезда на основании времени высокой точности для железнодорожного переезда; блок получения информации временного режима смены сигнала, который получает от системы управления светофором информацию временного режима смены сигнала на основании времени высокой точности для перекрестка с сигнальными устройствами; блок хранения, в котором хранится информация положения железнодорожного переезда, относящаяся к железнодорожным переездам, для которых информация расписания железнодорожного переезда может быть получена от системы управления железнодорожным переездом, и информация положения перекрестка, относящаяся к перекресткам с сигнальными устройствами, для которых информация временного режима смены сигнала может быть получена от системы управления светофором; блок приема информации движения, который принимает информацию движения, включающую в себя информацию собственного положения автомобиля от автомобиля; блок извлечения, который обращается к содержимому, хранящемуся в блоке хранения, для извлечения железнодорожных переездов и перекрестков с сигнальными устройствами, которые удовлетворяют условию дальности обеспечения информации, в пределах которой обеспечивается информация поддержки движения, указанная на основании информации движения; и блок управления обеспечением информации, который формирует информацию времени прогнозирования предупреждения, относящуюся к извлеченным железнодорожным переездам, на основании информации расписания железнодорожного переезда, относящейся к извлеченным железнодорожным переездам, и информации прогнозирования смены сигнала, относящейся к извлеченным перекресткам с сигнальными устройствами, на основании информации временного режима смены сигнала, относящейся к извлеченным перекресткам с сигнальными устройствами, и обеспечивает автомобилю информацию поддержки движения, включающую в себя информацию времени прогнозирования предупреждения и информацию прогнозирования смены сигнала.
2. Система обеспечения информации по п. 1, в которой условие дальности обеспечения информации включает в себя по меньшей мере условие, основанное на расстоянии от положения, указанного информацией собственного положения автомобиля.
3. Система обеспечения информации по п. 1 или 2, в которой блок управления обеспечением информации обеспечивает для железнодорожных переездов и перекрестков с сигнальными устройствами, которые удовлетворяют заданному условию короткого расстояния на основании положения, указанного информацией собственного положения автомобиля, среди извлеченных железнодорожных переездов и извлеченных перекрестков с сигнальными устройствами, информацию времени прогнозирования предупреждения и информацию прогнозирования смены сигнала более часто по сравнению с железнодорожными переездами и перекрестками с сигнальными устройствами, которые не удовлетворяют заданному условию короткого расстояния.
4. Система обеспечения информации по любому из пп. 1–3, в которой
информация движения включает в себя информацию направления движения, относящуюся к автомобилю, и
блок управления обеспечением информации обеспечивает для перекрестка с сигнальными устройствами, который находится непосредственно перед автомобилем, движущимся в направлении движения, указанном информацией направления движения, среди извлеченных перекрестков с сигнальными устройствами, информацию прогнозирования смены сигнала, относящуюся к сигнальным устройствам для дороги в направлении движения.
5. Система обеспечения информации по любому из пп. 1–4, в которой
когда для автомобиля запланирован маршрут движения, блок приема информации движения принимает информацию движения, включающую в себя запланированный маршрут движения, и
в случае приема запланированного маршрута движения блоком приема информации движения блок извлечения извлекает железнодорожные переезды и перекрестки с сигнальными устройствами на запланированном маршруте движения.
6. Система обеспечения информации по п. 5, в которой в случае приема запланированного маршрута движения блоком приема информации движения блок управления обеспечением информации обеспечивает информацию прогнозирования смены сигнала, относящуюся к сигнальным устройствам для дороги, по которой автомобиль движется согласно запланированному маршруту движения, среди сигнальных устройств на извлеченных перекрестках с сигнальными устройствами.
7. Система обеспечения информации по п. 5 или 6, в которой в случае приема запланированного маршрута движения блоком приема информации движения блок управления обеспечением информации осуществляет обеспечение более часто по сравнению со случаем, когда блок приема информации движения еще не принял запланированный маршрут движения.
8. Система обеспечения информации по любому из пп. 1–7, в которой
блок приема информации движения принимает информацию движения, включающую в себя информацию флага, указывающую, осуществляется ли автоматическое управление автомобилем на заданном уровне автоматизации, и
когда информация флага, принятая блоком приема информации движения, указывает, что осуществляется автоматическое управление автомобилем, блок управления обеспечением информации осуществляет обеспечение более часто по сравнению со случаем, когда не осуществляется автоматическое управление автомобилем.
9. Бортовое устройство, которое принимает информацию поддержки движения от системы обеспечения информации по любому из пп. 1–8, причем бортовое устройство включает в себя функцию позиционирования и функцию измерения времени с высокой точностью, которая принимает спутниковые сигналы от спутника GNSS и которая измеряет время с высокой точностью, причем бортовое устройство установлено на автомобиле, причем бортовое устройство содержит
блок управления отображением, который осуществляет на навигационном экране управление отображением между отображением состояния железнодорожного переезда на основании информации времени прогнозирования предупреждения, включенной в информацию поддержки движения, и отображением состояния сигнала на основании информации прогнозирования смены сигнала, включенной в информацию поддержки движения.
10. Бортовое устройство по п. 9, в котором блок управления отображением включает в себя блок управления отображением прогнозирования, который осуществляет на основании прогнозируемого времени прибытия для железнодорожных переездов и перекрестков с сигнальными устройствами на запланированном маршруте движения, когда маршрут движения запланирован, отображение состояния железнодорожного переезда и отображение состояния сигнала в прогнозируемое время прибытия.
11. Бортовое устройство по п. 9 или 10, в котором блок управления отображением включает в себя
блок управления отображением пиктограмм идентификации, который предписывает отображаемой карте отображать заданные пиктограммы идентификации на железнодорожных переездах и/или перекрестках с сигнальными устройствами, когда отображаемая карта на навигационном экране включает в себя железнодорожные переезды согласно информации времени прогнозирования предупреждения, включенной в информацию поддержки движения, и/или перекрестки с сигнальными устройствами согласно информации прогнозирования смены сигнала, включенной в информацию поддержки движения, и
блок управления отображением подробностей, который подробно отображает состояние выбранного железнодорожного переезда и/или состояние выбранного сигнального устройства на перекрестке в соответствии с операцией выбора одной из пиктограмм идентификации.
| JP 2018124096 A, 09.08.2018 | |||
| JP 2011210036 A, 20.10.2011 | |||
| JP 2008269481 A, 06.11.2008 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| JP 2017173201 A, 28.09.2017 | |||
| JP 2007218636 A, 30.08.2007. | |||

