Изобретение относится к системам управления движением наземных транспортных средств и может быть использовано для управления движением беспилотных объектов.
Известна система для управления движением судов [1], в которой для уменьшения времени обмена дополнительными данными о параметрах движения встречного (попутного) судна: курсе, скорости и виде выполняемого маневра и уменьшения числа аварийных ситуаций используются два режима обмена данными: "Вызов общий" и "Вызов по номеру". Основой для организации между подвижными абонентами являются имеющие на борту приемопередающие комплекты, работающие на одной несущей частоте ОВЧ диапазона. В первом режиме обмена данными "Вызов общий" судно передает в эфир свой бортовой номер и параметры своего движения. В тоже время на судне осуществляется прием сообщений от других встречных (попутных) судов и решается задача безопасного расхождения. Параметры наиболее «опасного» судна уточняются в режиме "Вызов по номеру".
К недостаткам аналога следует отнести:
- задача безопасного расхождения решается штурманом с использованием параметров движения собственного судна и принятых данных с «опасного» судна;
- время реакции на маневр судна составляет секунды.
Известна система управления полноприводным электромобилем, содержащая тормозную систему, асинхронные электродвигатели, блоки разделения крутящего момента и блоки управления тягой и стабилизацией [2]. Два асинхронных тяговых электродвигателя интегрированы в колеса транспортного средства по принципу мотор-колеса. Блоки разделения крутящего момента, блок управления тягой и стабилизацией интегрированы в контроллеры асинхронных электродвигателей. Количество таких контроллеров соответствует количеству применяемых электродвигателей. Один из контроллеров выполнен мастер-контроллером, обрабатывающим данные с положения рулевой колонки, педалей скорости и тормоза, со всех контроллеров электродвигателей и выдающим сигналы управления на контроллеры электродвигателей, причем мастер-контроллер выполнен с возможностью перевода в ручном переключении на режим бездорожья, принудительно вводя электродвигатели в режим синхронизации по крутящему моменту на колесах. Тормозная система электромобиля имеет двухконтурную систему из электрического тормоза электродвигателя и механических элементов тормоза. Каждый из контроллеров асинхронных электродвигателей выполнен с возможностью выполнения функции мастер-контроллера при подаче сигнала о неполадке или выходе из строя мастер-контроллера.
К недостаткам аналога следует отнести:
- не решается задача обнаружения и безопасного расхождения подвижных объектов на трассе;
- режимы работы объекта подразумевают наличие человека-оператора;
- установка механических, гидравлических и пневматических агрегатов не способствует увеличению безопасности и надежности систем транспортных средств (ТС);
- время реакции на маневр в ручном режиме составляет секунды.
Известна система управления беспилотным электромобилем, которая по большинству существенных признаков и принята за прототип [3]. В качестве шасси для установки системы беспилотного управления движением транспортного средства была выбрана электроплатформа. В электромобиле (ТС) применены решения беспилотного функционирования: заранее определен основной маршрут ТС, возможность передвигаться по выделенным полосам для общественного транспорта, определения обстановки вокруг ТС и зарядки аккумуляторных батарей в конечных точках маршрута.
Аппаратная часть системы определения обстановки вокруг ТС состоит из нескольких типов сенсоров.
Для обнаружения других объектов движения и препятствий на пути следования, а также построения виртуальной карты маршрута использованы 4 штуки лидаров Velodyne HDL-32, расположенные по периметру автомобиля и планарный лидар Sick LMS Pro 511, установленный на уровне бампера, который имеет более высокую частоту и защиту от воздействия окружающей среды и использован для определения препятствий впереди автомобиля на более дальних расстояниях.
Для повышения надежности системы обнаружения препятствий на ТС, помимо лидарной системы, применяются системы радаров ближнего и дальнего действия. Подходящими по характеристикам являются радары Continental ARS441 и SRR510. Применение данной системы управления из нескольких радаров позволяет оценивать ситуацию впереди объекта, измерять расстояние до препятствий на больших дальностях (до 250 м). На работу радаров меньше влияют погодные условия, цвет объектов и освещенность. Также радары имеют хорошую разрешающую способность по дальности и скорости, мгновенную обработку данных, что особенно важно для высоких скоростей движения.
В ближней зоне (до 3 м) контроль обстановки вокруг ТС будет осуществляться с помощью системы, состоящей из 16 ультразвуковых датчиков.
Соблюдение правил дорожного движения - обязательное условием эксплуатации ТС на дорогах общего пользования. Распознавание участников дорожной сцены, в частности, других автомобилей, пешеходов, дорожных знаков, разметки и т.д. осуществляется с помощью системы технического зрения, аппаратной частью которой служат видеокамеры Basler [4]. В системе беспилотного управления движением ТС применены три видеокамеры, полностью охватывающие передний обзор.
Для повышения эффективности, надежности и безопасности работы систем обнаружения препятствий и других участников дорожного движения применен тепловизор. Получаемое с него тепловое изображение, после обработки вычислительным комплексом (бортовым компьютером), позволяет улучшить распознавание границ дорожного полотна, заранее оценивать приближающиеся повороты и искривления на маршруте.
Для точного позиционирования ТС на местности применена комплексная слабосвязанная навигационная система, состоящая из высокоточной GNSS навигации и инерциального блока с одометром. Система позиционирования интегрирована с бортовым компьютером.
Для работы системы распознания параметров дорожной сцены и объектов дорожного движения использована стереокамера ZED [5] с вычислительным модулем Nvidia Jetson ТХ2. Данное сочетание оборудования обеспечивает непрерывный сбор данных при движении и построение 3D-модели дорожной сцены, с дальнейшим сохранением и загрузкой в общую базу данных. Система позволяет проводить постоянный сбор данных об окружающей обстановке и прорисовывать траекторию движения, что поможгает прокладывать наиболее благоприятный маршрут передвижения. Для работы камеры требуется интерфейс USB 3.0, высокопроизводительная видеокарта Nvidia или платформа для разработки от Nvidia Jetson ТХ 1-й или 2-й серии, а также установленная библиотека Cuda 7.5.Среднее значение дальности с помощью стереокамеры составляет 11,65 м.
Если применить ЛИДАР Velodyne VLP 16, механизм сканирования которого использует вращающееся зеркало и ось вращения зеркала находится перпендикулярно к поверхности зеркала, то развертка отраженного лазерного луча будет представлять собой эллиптическую кривую. Преимуществом такого подхода является то, что дважды сканируется каждая точка окружающего пространства.
Система рулевого управления имеет возможность внешнего воздействия и подключения к системам ADAS с функцией автопилота с целью использования для управления поворотом ТС электромеханического рулевого механизма выбранного типа. Данный тип рулевого механизма с установкой рейки на штатные места подрамника отвечает требованиям по нагруженности, долговечности и не нарушает углов установки колес. Контроль рулевого управления осуществляется за счет изменения параметров вращения трехфазного синхронного электродвигателя, установленного на рулевой рейке. Управляющие сигналы будут передаваться посредством CAN-шины. Данное решение обеспечивает интеграцию рулевого управления в общую архитектуру CAN-шины объекта, быструю реакцию на управляющее воздействие и надежность срабатывания рулевого управления в целом. В качестве контроллера для электродвигателя выбран модуль [6], позволяющий регулировать положение, скорость и момент электродвигателя. Данный модуль является одновременно и контроллером, с помощью которого возможны прием и передача сообщений в CAN-шину.
Недостатки прототипа:
- среднее значение дальности действия с помощью стереокамеры составляет 11,65 м, что не удовлетворяет современным требованиям по безопасности движения беспилотного ТС;
- станции подзарядки аккумуляторных батарей находятся в конце маршрута, но если маршрут длительный и из-за непредвиденных обстоятельств может потребоваться срочная подзарядка батарей ТС;
- под металлическими виадуками и внутри туннелей из-за экранировки радиосигналов система GNSS работает с ошибками, превышающими допустимые значения;
- наличие крупных металлических предметов вдоль трассы приводит к смещению траектории и увеличению ошибок определения местоположения ТС на трассе, поэтому GNSS не может рассматриваться как абсолютно надежная информация о позиции.
Таким образом, основной технической задачей, на решение которой направлено изобретение, является расширение функциональной надежности системы управления движением транспортных средств и повышение безопасности вождения ТС по маршруту за счет повышения точности построения траектории движения ТС, надежности системы обнаружения объектов на трассе и полной автоматизации процессом управления поведением ТС на маршруте путем введения программно выполняемых взаимосвязанных процедур и необходимых для их выполнения аппаратных средств.
Указанный технический результат достигается тем, что в систему управления движением беспилотных транспортных средств (ТС) с электроприводом, включающую беспилотные ТС, каждое из которых оснащено устройством зарядки аккумуляторных батарей и электроплатформой, оснащенной основным бортовым компьютером, обеспечивающим непрерывный сбор данных при движении, построение 3D-модели дорожной сцены, с дальнейшим сохранением и загрузкой в основную общую базу данных, системой рулевого управления с возможностью внешнего воздействия и подключения к модулю осуществления процедур системы ADAS и использования для управления поворотом ТС электромеханического рулевого механизма, контроллерами для электродвигателей, позволяющими регулировать положение, скорость и момент электродвигателя в соответствии с поступающими сигналами управления, аппаратной частью системы определения обстановки вокруг беспилотного ТС, содержащей лидары, расположенные по периметру беспилотного ТС, и мощный планарный лидар, установленный на уровне бампера, систему радаров ближнего и дальнего действия для оценки ситуации до препятствий в дальней зоне до 250 м, ультразвуковые датчики для оценки ситуации в ближней зоне до 3 м, при этом распознавание участников дорожной сцены осуществляется с помощью системы технического зрения, в аппаратную часть которой входят видеокамеры, а для повышения эффективности, надежности и безопасности работы систем обнаружения препятствий и других участников дорожного движения используется тепловизор, для позиционирования беспилотного ТС на местности используется навигационная система GNSS, соединенная с основным бортовым компьютером через CAN-шину, для распознания параметров дорожной сцены и объектов дорожного движения используются стереокамеры с высокопроизводительными видеокартами и вычислительными модулями, при этом контроль рулевого управления осуществляется за счет изменения параметров вращения асинхронного электродвигателя, а управляющие сигналы передаются посредством общей архитектуры CAN-шины, которая связывает двухсторонними связями основной и резервный бортовые компьютеры с устройством зарядки аккумуляторных батарей), лидарами, мощным планарным лидаром, системой радаров ближнего и дальнего действия, ультразвуковыми датчиками, системой технического зрения, состоящей из видеокамер и тепловизора, системой высокоточной GNSS навигации, вычислительными модулями стереокамер и модулем осуществления процедур системы ADAS, дополнительно введены пассивные отражатели радиосигналов радара заднего вида, расположенные за дорожной разметкой по всему маршруту следования беспилотного ТС, центр управления, который через первую группу базовых станций сотовой связи, приемопередатчик сотовой связи с антенной, устройство криптозащиты, связан двухсторонними связями с переключателем непосредственно и через CAN-шину с основным и резервным компьютерами, а через вторую группу базовых станций сотовой связи - с соответствующим оборудованием обслуживаемой станции подзарядки беспилотных ТС, главный тормозной цилиндр, связанный механически с тормозным электродвигателем с редукторной частью, который соединен с контроллером тормозного электродвигателя и через него с CAN-шиной, при этом главный тормозной цилиндр связан гидравлическими связями с исполнительными цилиндрами, число которых равно числу мотор-колес, основной и резервный бортовые компьютеры с помощью CAN-шины соединены двухсторонними связями с основным и резервным программными модулями виртуальной карты маршрута, основной общей и резервной общей базой данных, приемопередатчиком сотовой связи с антенной, блоком формирования ортогональных кодов, контроллером асинхронного тягового мотор-колеса, переключателем, устройством криптозащиты, контактором, переключателями направления, коммутатором, термодатчиками, системой управления и контроля мотор-колес, контроллерами поворота, светотехническим оборудованием, блоком обработки сигналов радара заднего вида, контроллером тормозного электродвигателя, противопожарными датчиками, огнетушителями, связанными с соответствующими противопожарными датчиками, при этом шины внешнего ввода маршрутных данных и функционального контроля оборудования беспилотного ТС, связанные с основным и резервным бортовым компьютером соответственно, на стоянках подключаются к внешним вычислительным средствам ввода необходимой информации и функционального контроля оборудования беспилотного ТС, а для осуществления поворотов требуемый угол поворота мотор-колеса задается в цифровом виде с основного или резервного бортового компьютера через CAN-шину на контроллер поворота и через него на электродвигатель поворота с редукторной частью, установленный на стойке Макферсона, с помощью которой необходимое усилие перелается на мотор-колесо, вращение которого в это время обеспечивается от электротехнической машины и тягового асинхронного электродвигателя с редукторной частью с помощью шарнира равных угловых скоростей, обеспечивающего передачу крутящего момента при углах поворота от 1 до 70 градусов относительно оси.
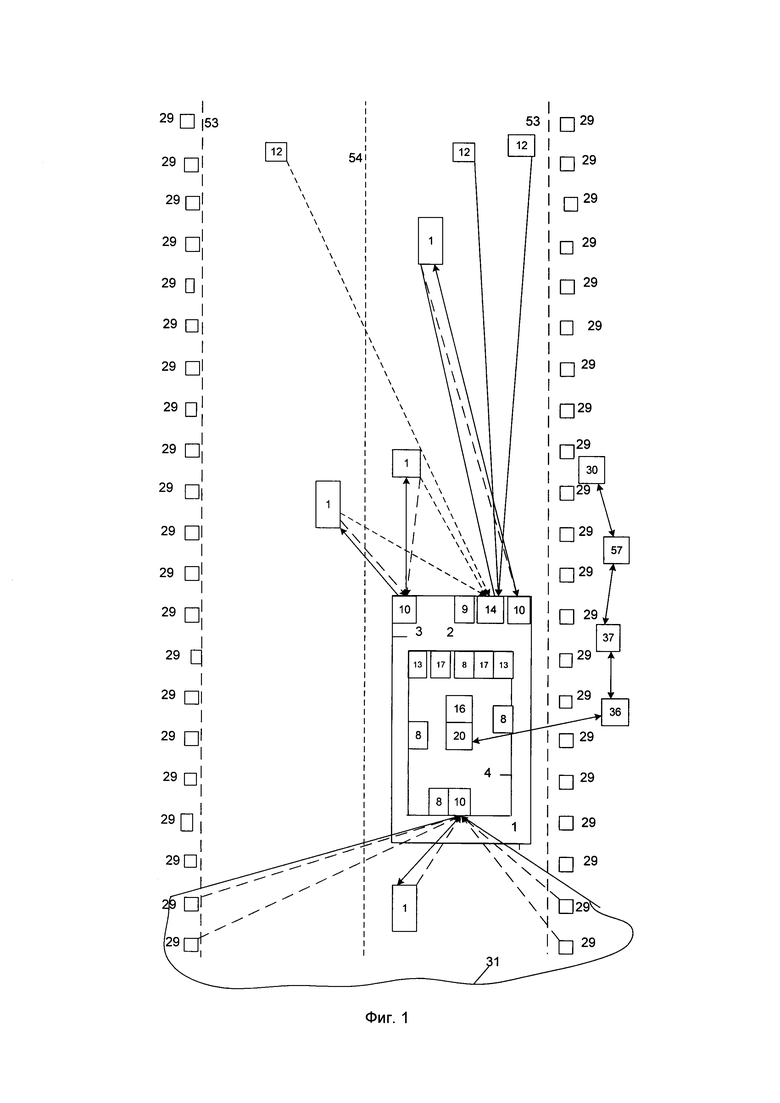
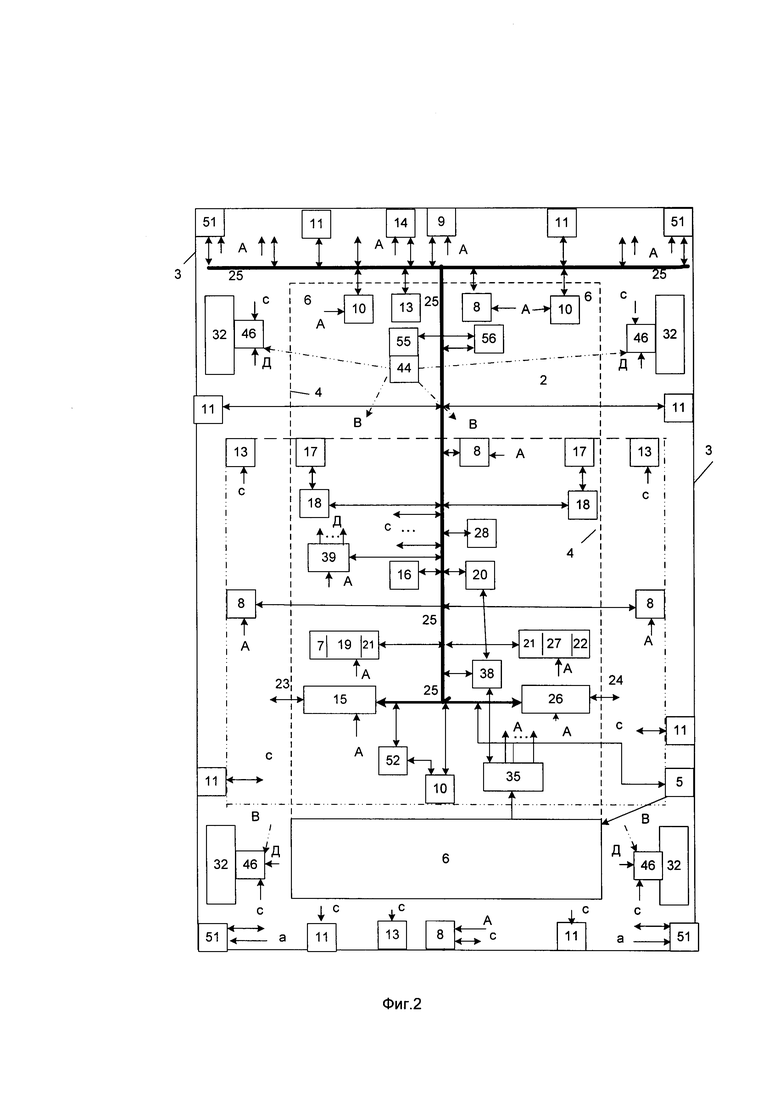
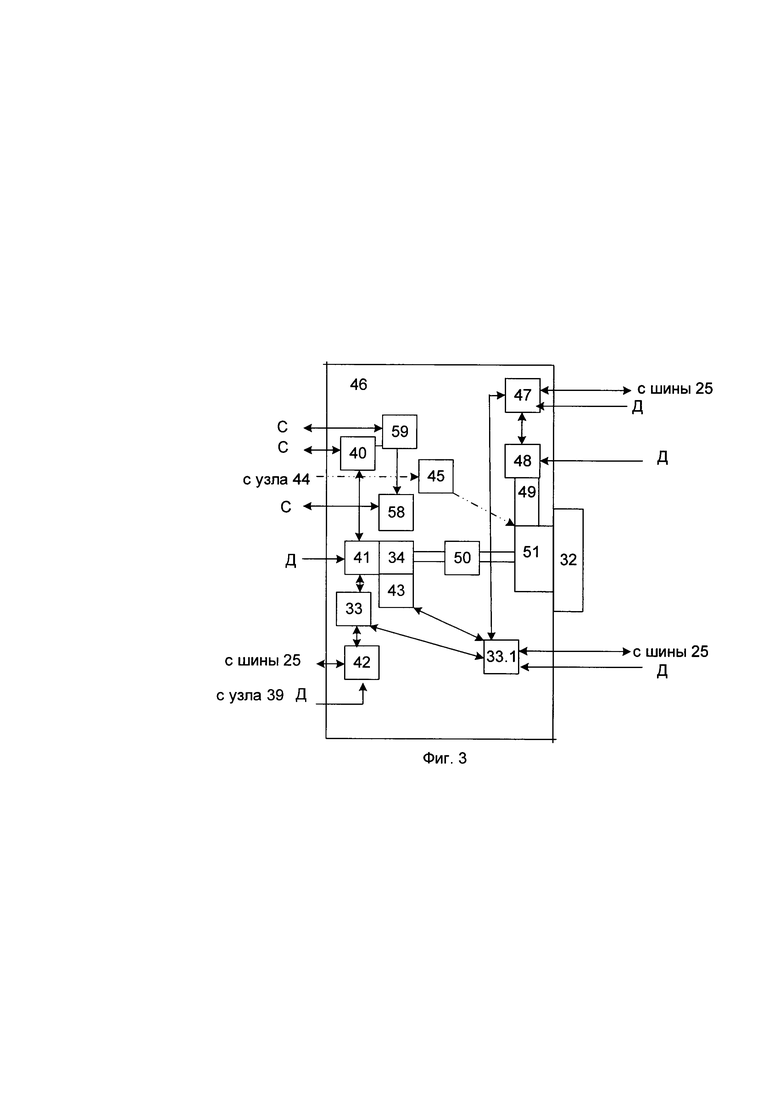
Сущность технического решения поясняется чертежами. На фиг. 1 приведена структурная схема системы управления беспилотным транспортным средством, на фиг. 2 - структурная схема оборудования ТС, на фиг. 3 - структурная схема системы 46 управления и контроля мотор-колес 32 и введены обозначения:
1 - транспортное средство;
2 - электроплатформа;
3 - внешняя обводка ТС (показана условно);
4 - обводка крыши ТС (показана условно);
5 - устройство зарядки аккумуляторных батарей 6;
7 - основной программный модуль виртуальной карты маршрута;
8 - лидары;
9 - мощный планарный лидар;
10 - системы радаров ближнего и дальнего действия;
10.1 - радар заднего вида;
11 - ультразвуковые датчики;
12 - другие участники дорожной сцены: автомобили, пешеходы, дорожные знаки, разметки и т.д.;
13 - система технического зрения, состоящая из видеокамер;
14 - тепловизор;
15 - основной бортовой компьютер;
16 - система высокоточной GNSS навигации, связанная с основным бортовым компьютером;
17 - стереокамера с вычислительным модулем 18;
19 - основная общая база данных;
20 - приемопередатчик сотовой связи с антенной;
21 - модуль осуществления процедур системы ADAS;
22 - резервный программный модуль виртуальной карты маршрута;
23 и 24 - шины внешнего ввода маршрутных данных, функционального контроля оборудования ТС, связанные с основным и резервным бортовыми компьютерами 15 и 26 (вычислительными комплексами) соответственно;
25 - CAN-шина (Controller Area Network);
26 - резервный бортовой компьютер;
27 - резервная общая база данных;
28 - блок формирования ортогональных кодов;
29 - пассивные отражатели радиосигналов радара заднего вида;
30 - обслуживаемая станция подзарядки ТС;
31 - диаграмма направленности радара заднего вида;
32 - асинхронное тяговое мотор-колесо с контроллером 33;
33.1 - главный мастер-контроллер;
34 - тяговый асинхронный электродвигатель с редукторной частью;
35 - переключатель;
36 - первая группа базовых станций сотовой связи;
37 - центр управления (ЦУ);
38 - устройство криптозащиты;
39 - контактор;
40 - переключатель направления;
41 - электротехническая машина;
42 - коммутатор;
43 - термодатчики;
44 и 45 - главный и исполнительный тормозные цилиндры;
46 - система управления и контроля мотор-колес 32;
47 - контроллер поворота;
48 - электродвигатель поворота с редукторной частью;
49 - стойка Макферсона;
50 - шарнир равных угловых скоростей;
51 - светотехническое оборудование;
52 - блок обработки сигналов радара заднего вида;
53 и 54 - дорожная разметка и разделительная полоса;
55 - тормозной электродвигатель с редукторной частью;
56 - контроллер тормозного электродвигателя 55;
57 - вторая группа базовых станций сотовой связи;
58 - противопожарные датчики;
59 - огнетушители.
Связи между узлами 45 и 44 - гидравлические, а между узлами 34, 49 и 32 - механические. На малопотребляющие узлы напряжение питания подается по шине 25. Конструктивно на фиг. 2 показан один из вариантов привязки соответствующих узлов к электроплатформе и кузову электромобиля. На фиг. 2 и фиг. 3 узлы, условно показанные с соприкасающимися сторонами соответствующих им прямоугольников, механически связаны.
Система работает следующим образом. Запускается ТС нажатием переключателя 35 или при получении на ТС защищенной команды управления с центра управления 37, прошедшей последовательно группу базовых станций 36 сотовой связи, приемопередатчик 20 сотовой связи с антенной, устройство 38 криптозащиты, вычислительный комплекс 15 или 26 и переключатель 35. В этих случаях ток с аккумуляторных батареи 6 поступает на вычислительные комплексы 15 и 26, контроллеры 33 и другие узлы, которые входят в режим диагностики (контроля функционирования) и при положительном результате замыкает контакты контактора 39, при этом напряжение подается на электродвигатели и управляемый переключатель 40 направления. Блоком 15 или 26 обеспечивается противопожарная защита ТС с помощью огнетушителей 59, установленных вблизи наиболее нагреваемых узлов (электродвигателей), клапаны которых срабатывают при наличии сигнала с противопожарного датчика 58, и команды управления с CAN-шины 25. В качестве клапана может быть использован соответствующий пиропатрон.
Для движения вперед или назад переключатель 40 направления с помощью команд с блоков 15 или 26 по шине 25 переводится из разомкнутого состояния (положения нейтрали) в положение коммутации вращения электротехнической машины 41 в асинхронных тяговых мотор-колесах 32 и тяговом электродвигателе 34 с редукторной частью в прямом или обратном направлении (вперед или назад).
При подаче команды управления по CAN-шине 25 с блоков 15 или 26 на главный мастер-контроллер 33-1, передающий параметры управления по CAN-шине 25 на остальные контроллеры 33 с учетом требуемого направления движения, для переключения на коммутаторе 42 напряжения, подаваемого с аккумуляторных батарей 6 через переключатель 35, контактор 39, для электротехнической машины 41 асинхронных тяговых мотор-колес 32 и тягового электродвигателя 34 с редукторной частью и других электродвигателей. В результате этого ТС начинает ускоряться.
Аккумуляторные батареи 6 для сокращения времени подзарядки состоят из нескольких секций, которые заряжаются одновременно и параллельно. Устройство зарядки 5, связанное с батареей 6, размещается на электрическом кабеле, длиной несколько метров, например, 2-3 м, с толщиной токонесущих проводов, обеспечивающей допустимые потери. Для зарядки батарей на маршруте следования расположены обслуживаемые станции 30 подзарядки, на которых может быть проведено техническое обслуживание (диагностика) беспилотных ТС и при необходимости с разрешения оператора центра управления осуществлена замена неисправных узлов. Для обеспечения этой процедуры на соответствующие контакты устройства 5 зарядки подводятся сигнальные провода CAN-шины 25. На обслуживаемой станции подзарядки аккумуляторных батарей 6 помимо основных функций могут быть выполнены, например, процедуры функционального контроля по CAN-шине 25, выведенной на устройство 5, включенной аппаратуры ТС, стоящего на подзарядке. Связь с ЦУ в этом случае обеспечивается через вторую группу 57 базовых станций сотовой связи.
Подведенная энергия к статору электродвигателя 34 создает в нем первичное вращающееся магнитное поле, которое благодаря магнитному сцеплению с ротором наводит в его короткозамкнутых витках электрический ток для создания вторичного магнитного поля ротора.
Температуру обмоток статора и ротора в целях защиты их от перегрева отслеживают контроллеры 33 посредством опроса термодатчиков 43 электротехнической машины 41 в асинхронном тяговом электродвигателе 34 с редукторной частью по существующей температуре и градиенту ее роста. При повышении температур выше критической зоны с учетом градиента роста контроллер 33 переводит работу электротехнической машины 41 в номинальные режимы работы (без перегрузок) до падения температуры до рабочей, после чего восстанавливает полную функциональность ее работы. Сам контроллер 33 схемотехнически защищен от замыканий и непредвиденных скачков напряжений и токов. В наиболее критические по температуре места с передней части ТС направлены воздуховодные каналы, что снижает риски температурных перегрузок.
В процессе движения контроллеры 33 каждого двигателя обрабатывают сигналы с электродвигателей в режиме реального времени.
При изменениях направления движения, моделируемых в блоках 15 и 26, мастер-контроллер 33 перераспределяет крутящие моменты на колесах за счет управления асинхронными тяговыми электродвигателями 34 и обеспечивает устойчивость руления.
При проскальзывании одного или нескольких колес изменения по крутящему моменту и скорости, считываемые контроллерами 33, обрабатываются главным мастер-контроллером 33.1, который передает по CAN шине 25 данные по управлению каждым мотор-колесом 32 и тяговым электродвигателем 34 с редукторной частью для стабилизации устойчивости движения ТС, изменяя и перераспределяя крутящие моменты на колесах по заданному алгоритму.
При торможении команды управления с блоков 15 или 26, моделирующие тормозные усилия в цифровом виде, передаются на контроллер 47 поворота, где происходит обработка информации. На основании данных о частоте вращения колеса и величины тормозной команды с блоков 15 или 26 контроллер 47 поворота вычисляет момент торможения для каждого колеса в зависимости от направления движения и проскальзывания колес, которые необходимо создать в сложившейся ситуации для обеспечения заданного торможения. Если полученный момент торможения менее заданной в программе управления величины, мастер-контроллер дает команду на изменение скорости вращения мотор-колеса 32 и тягового электродвигателя 34 с редукторной частью на режим генератора без использования механического тормоза. Если полученный момент торможения больше заданной в алгоритме управления величины, происходит дополнительно механическое срабатывание за счет коммутации контроллером 56 тормозного электродвигателя 55, связанного механически с главным тормозным цилиндром 44, приводящим в действие исполнительный тормозной цилиндр 45, гидравлическое давление которого действует, например, на суппорт 51, устанавливающий соответствующие тормозные колодки в требуемое положение. В результате этого торможение осуществляется и механическим тормозом и электродвигателями, переходящими в режим генератора. Причем механический тормоз является вторичным для увеличения тормозного усилия, которое полностью не обеспечивается электрическим тормозом мотор-колес 32 и тягового электродвигателя 34 с редукторной частью.
При отсутствии воздействий, моделирующих в блоках 15 и 26 процедуры акселератора и торможения, с них не выдаются команды управления для коммутации узлами 35, 39 напряжения с аккумуляторной батареи 6 мотор-колес 32 и тягового электродвигателя 34 с редукторной частью, и не создается магнитное поле электродвигателей. Статор и ротор не имеют физического контакта (через щетки, магниты и другие) и взаимодействуют только через магнитное поле. При его отсутствии достигается большой инерционный пробег транспортного средства из-за отсутствия электромагнитных и физических ограничений электромотора по его «выбегу».
Контроллеры 33 непрерывно считывают данные о состоянии проскальзывания и при необходимости приводят тяговый электродвигатель 34 с редукторной частью в работу для стабилизации управления.
На фиг. 2 приведены две пары колес, но их может быть и больше.
Аккумуляторную батарею 6 располагают на электроплатформе 2 так, чтобы центр тяжести ТС располагался рядом с точкой пересечения прямых, соединяющих центры противоположных мотор-колес 32 и как можно ближе к дорожному полотну. Этим повышается устойчивость ТС на поворотах.
Для осуществления поворотов может быть использована, например, следующая структурная схема системы 46 управления и контроля мотор-колес 32, показанная на фиг. 3. Требуемый угол поворота мотор колеса 32 задается в цифровом виде с блока 15 или 26 через шину 25 на контроллер 47 поворота и через него на электродвигатель 48 поворота с редукторной частью, установленный на стойке 49 Макферсона, с помощью которой необходимое усилие передается на мотор-колесо 32. Вращение мотор-колеса 32 в это время обеспечивается от узлов 41 и 34 с помощью шарнира 50 равных угловых скоростей. Шарнир 50 равных угловых скоростей обеспечивает передачу крутящего момента при углах поворота от 1 до 70 градусов относительно оси. Данный тип рулевого механизма устанавливается на штатные места подрамника отвечает требованиям по нагруженности, долговечности и не нарушает углов установки колес. Управляющие сигналы передаются на соответствующие контроллеры посредством CAN-шины. Данное решение обеспечивает интеграцию рулевого управления в общую архитектуру CAN-шины объекта, быструю реакцию на управляющее воздействие и надежность срабатывания рулевого управления в целом. Для контроля узлами 33, 47, 56 электродвигателей 41, 48, 55 можно выбрать один из модулей, представленных в работе [6], который позволяет регулировать положение, скорость и момент электродвигателя. Такой модуль является одновременно и контроллером, с помощью которого возможна прием и передача сообщений в CAN-шину.
Обеспечение безопасности пешеходов, других объектов движения и препятствий на пути следования, соблюдение правил дорожного движения -обязательные условия эксплуатации беспилотных ТС на дорогах общего пользования. Для обеспечения этих требований аппаратная часть системы определения обстановки вокруг ТС состоит из нескольких типов сенсоров [5].
Для обнаружения других объектов движения и препятствий на пути следования, а также построения виртуальной карты маршрута основным программным модулем 7 могут быть использованы, например, 4 штуки лидаров 8, например, типа Velodyne HDL-32, расположенные по периметру ТС и мощный планарный лидар 9, например, типа Sick LMS Pro 511, установленный впереди на уровне бампера, который имеет более высокую частоту и защиту от воздействия окружающей среды и используемый для определения препятствий впереди автомобиля на более дальних расстояниях. При остановках ТС лидар 9 отключается для обеспечения безопасности зрения встречных водителей и пешеходов.
Для повышения надежности системы обнаружения препятствий на ТС, помимо лидарной системы, применяются системы радаров 10 ближнего и дальнего действия переднего и заднего вида, например, радары типа Continental ARS441 и SRR510. Применение такой системы из нескольких радаров позволяет оценивать ситуацию впереди объекта, измерять расстояние до препятствий на больших дальностях (до 250 м). На работу радаров меньше влияют погодные условия, цвет объектов и освещенность. Также радары имеют хорошую разрешающую способность по дальности и скорости, мгновенную обработку данных, обнаружение выполняемых маневров встречным (попутным) ТС и принятия необходимого решения и выполнения соответствующей процедуры обеспечения безопасного движения, что особенно важно для высоких скоростей движения. На основе радиолокационных данных программно могут быть выполнены известные процедуры экстраполяции [13], с помощью которых определяются намерения встречного или попутного объекта. Для устранения помех от радаров соседних ТС в качестве зондирующих сигналов могут быть использованы ортогональные коды блока 28 [7], для каждого ТС свой, которые при приеме в результате корреляционной обработки сигналов могут быть выделены из помех, что улучшит различение дорожной обстановки. Способ формирования и обработки таких кодов подробно рассмотрен в патенте [7]. Для уменьшения влияния отражений радиоволн от земной поверхности и увеличения дальности прямой видимости объектов радары размещают сверху кузова: два спереди и один сзади. В радаре 10.1 заднего вида имеется два программных модуля: первый - для обнаружения, определения параметров движения и сопровождения объектов на дорожной сцене, второй - для точного позиционирования транспортного средства в блоке 52 и определения его параметров движения. Пройденное расстояние фиксируется с помощью системы 16 высокоточной GNSS навигации. За пределами дорожной разметки 53 отметки, характеризующие положение объектов, исключаются из процедуры обработки, кроме светофоров, пешеходов, ТС на перекрестках дорог и других. Отметки от отражателей 29 при движении ТС с известной скоростью приходят в радар 10.1 и блок 52 в разные моменты времени и легко различимы. Зная точные значения скорости движения ТС и время задержки отраженных от отражателей 29 радиосигналов, радиолокационными методами можно определить текущее местоположение ТС с высокой точностью [8].
В ближней зоне (до 3 м) контроль обстановки вокруг ТС будет осуществляться, например, с помощью системы, состоящей, как минимум, из 8 ультразвуковых датчиков 11, размещаемых по сторонах ТС. Эти датчики одновременно могут входить в охранную систему ТС, при срабатывании которой соответствующее сообщение с блоков 15 или 26 через узлы 38, 20, группу 36 базовых станций сотовой связи поступает в центр 37 управления для принятия необходимого решения и выполнения соответствующих действий. В особых случаях (неисправность, авария других средств и т.п.) оператором центра 37 управления может быть выполнено внешнее управление ТС через соответствующее оборудование центра 37, узлы 36, 20, 38, шину 25, блоки 15 или 26. Для этого на экран монитора оператора должна быть выведена полная информация о дорожной сцене в точке нахождения ТС и его параметры движения. Внешнее управление ТС осуществляется с ограниченной скоростью. При наличии в потоке аналогичных беспилотных ТС с помощью приемопередатчиков 20 между ними организуется обмен данными о дальнейших действиях и чем меньше расстояние между ними, тем интенсивнее становится обмен.
Соблюдение правил дорожного движения - обязательное условием эксплуатации беспилотных ТС на дорогах общего пользования. Распознавание участников дорожной сцены, в частности, других участников 12 дорожной сцены: других ТС, автомобилей, пешеходов, дорожных знаков, разметки, поворотов и т.д. осуществляется с помощью системы технического зрения, состоящей например, из видеокамеры Basler [4]. В системе беспилотного управления движением ТС могут быть применены, например, три видеокамеры, полностью охватывающие передний обзор [3].
Для повышения эффективности, надежности и безопасности работы систем обнаружения препятствий и других участников дорожного движения применен тепловизор 14. Получаемое с него изображение, после обработки вычислительным комплексом 15 или 26, позволит улучшить распознавание границ дорожного полотна, заранее оценить приближающиеся повороты и искривления на маршруте. Тепловизор, в отличие от видеокамер, функционирует при засвечивании фарами встречных автомобилей, сквозь дым, пыль, туман и дождь.
Для точного позиционирования ТС на местности совместно со слабосвязанной навигационной системой, состоящей из высокоточной GNSS навигации и инерциального блока с одометром, применена система дорожного позиционирования, в состав которой входят блоки 15 или 26, блок 52 обработки радара 10.1 заднего вида, блок 28 формирования ортогональных кодов, радар 10.1 заднего вида с шириной диаграммы направленности 31 более 120°, охватывающей минимум четыре пассивных отражателя 29. Ортогональные коды необходимы для выделения радиосигналов своего радара от других радиосигналов. Радар 10 выбран для обеспечения точного позиционирования ТС потому, что на маршруте суммарная скорость приближения объектов со встречными объектами больше, чем с движущимися в одном направлении. Поэтому больше остается времени для обработки принимаемых сигналов с целью позиционирования. Пассивные отражатели 29 могут быть установлены, например, на столбах освещения трассы. Места установки отражателей позиционируются с высокой точностью, номеруются, вносятся в виртуальную карту маршрута и под каждый отражатель 29 программно подводится строб для упрощения его идентификации при обработке отраженных радиосигналов. Обработка сигналов радара 10.1 заднего вида осуществляется в блоках 15 или 26, например, по принципу обработки сигналов глобальных навигационных спутниковых системах [9] или радиолокационными методами [8] по отраженным сигналам, как минимум, от четырех отражателей 29. Жесткая, высокоточная привязка отражателей к известным координатам их расположения на местности позволит на порядок повысить точность определения отражателей на маршруте, что дополнительно повысит безопасность движения ТС. Элементы системы позиционирования интегрированы совместно с высокоточной GNSS навигации, инерциальным блоком с одометром и бортовым компьютером 15 или 26. Модуль 16 может быть реализован, например, на двухантенном GNSS приемнике OC-203-GSM с двумя антеннами АТ330 [10].
Благодаря программным модулям 47 и блокам 15 или 26 система выполняет комплекс процедур, свойственных подсистемам ADAS, например, экстренного торможения, кругового обзора, контроля слепых зон, предупреждения об опасном сближении, курсового слежения за полосой движения (выезда за пределы полосы следования), ночного видения, помощи при парковке, предупреждения об опасном сближении с пешеходом, предупреждения о расположенном сзади автомобиля препятствии, распознавания дорожных знаков и разметки.
Все функции сенсоров системы предназначены для распознавания дорожной сцены, объектов дорожного движения и раннего предупреждения о возможной критической ситуации, что позволяет создать вокруг ТС контура безопасной зоны, при нарушении которой должны быть программно приняты соответствующие меры для ликвидации проблемы.
Для повышения качества работы системы распознания параметров дорожной сцены и объектов дорожного движения используется стереокамера 17, например, типа ZED [5] с вычислительным модулем 18, например, марки Nvidia Jetson ТХ2. Данное сочетание этого оборудования с блоками 15 или 26 должно обеспечить непрерывный сбор данных при движении и построении 3D-модели дорожной сцены, с дальнейшим сохранением и загрузкой в основную или резервную общие базы 19 или 27 данных. Резервная общая база 27 данных практически не отличается от основной 19 за исключением программного модуля переключения с основной на резервную базу при обнаружении программных сбоев или выходе из строя ее фрагментов. Система позволяет проводить постоянный сбор данных об окружающей обстановке и прорисовывать траекторию движения, что позволяет прокладывать наиболее благоприятный маршрут передвижения. Для работы стереокамеры 17 требуется, например, интерфейс USB 3.0 [11-12], высокопроизводительная видеокарта Nvidia или платформа для разработки от Nvidia Jetson ТХ, а установленная библиотека Cuda 7.5 позволяет на базе стереокамеры 7 вести построение карт глубины.
Для увеличения времени безотказной работы ТС основные его узлы дублируются с сохранением выполняемых функций, например, блоки 15 и 26, базы 19 и 27 и т.п.
Система навигации выполнена по раздельной схеме интеграции данных радара 10.1 заднего вида, приемника навигационной системы 16, т.е. они работают независимо друг от друга, в связи с чем точность измерения координат повышается [9]. Периодически проводится корректировка навигационных данных по вновь полученной информации. Интеграция новой системы позиционирования с бортовым компьютером 15 или 26 позволяют обеспечить не только повышение точности определения местоположения ТС на маршруте, но и целостность и плавность траектории движения на всей длине маршрута в заданных пределах.
Система рулевого управления имеет возможность внешнего воздействия и подключения к отдельным процедурам системы ADAS с функцией автопилота с целью использования для управления поворотом ТС электромеханического рулевого механизма выбранного типа. Управляющие сигналы передаются посредством CAN-шины. Данное решение обеспечивает интеграцию рулевого управления в общую архитектуру CAN-шины объекта, быструю реакцию на управляющее воздействие и надежность срабатывания рулевого управления в целом. В качестве контроллера электродвигателя может быть выбран, например, модуль, представленный в работе [6], который позволяет регулировать положение, скорость и момент электродвигателя. Данный модуль является одновременно и контроллером, с помощью которого возможны прием и передача сообщений в CAN-шину.
CAN-шина 25 является основным механизмом соединения устройств, узлов и датчиков ТС между собой. Характеристики протокола CAN, которые обосновывают ее применение в системе:
- высокая надежность и защищенность;
- каждое сообщение имеет свой собственный приоритет;
- реализация механизма обнаружения ошибок;
- автоматическая повторная отправка сообщений, которые были доставлены с ошибкой;
- широковещательный характер передачи данных;
- возможность присутствия нескольких ведущих (master) устройств в одной сети;
- широкий диапазон скоростей работы;
- высокая устойчивость интерфейса к помехам;
- наличие механизма обнаружения «сбойных» узлов с последующим удалением таких узлов из сети и другие.
Светотехническое оборудование 51 состоит из фар, габаритных огней, подфарников, визуального признака отсутствия водителя, звукового имитатора с речепреобразователем для воспроизведения звуков из кодограмм, поступающих из шины 25 и других узлов. При сближении с другими управляемыми ТС, чтобы не ослепить встречных водителей, «дальний» свет фар адаптивно с помощью команды с блоков 15 или 26 и шины 25 меняется на «ближний».
В системе осуществлено объединение различных систем беспилотного ТС с помощью CAN-шины, в том числе бортового вычислительного комплекса, программного обеспечения, сенсоров, контроллеров, электроплатформы и сети передачи данных в единую ссистему беспилотного управления движением ТС.
Надежность системы управления в целом зависит от резервирования основных узлов, правильности и оперативности программного выбора решения и осуществления соответствующих действий в экстремальных дорожных и климатических условиях. С этими задачами справляются быстродействующие элементы предлагаемой системы управления.
Центр 37 управления предназначен для слежения за движением транспортных средств на маршрутах, стоянках на станциях 30 и при необходимости выдачи им соответствующих защищенных команд управления на изменения режимов их работы. Для реализации этих процедур центр 37 управления может состоять, например, из нескольких приемопередатчиков сотовой связи, аналогичные, применяемым на ТС (узел 20), соответствующие им устройства криптозащиты, аналогичные, применяемым на ТС (узел 38), соединенные стандартными локально-вычислительными сетями связи с сервером центра, в котором заложена база данных о всех управляемых ТС и их маршрутах, возможных дорожных сценах и другие необходимые для управления движением ТС процедуры. Контроль работы системы осуществляется операторами с помощью обстановки, отображаемой на экранах терминалов практически в масштабе реального времени. Число каналов приемо-передачи определяется количеством ТС, маршрутов, их протяженностью и географическим положением, базовых станций сотовой связи на маршрутах, участвующих в процедуре «хэндофф» (передача при движении ТС от одной базовой станции к другой) и другими обстоятельствами. В центр управления также передаются данные о прохождении ТС контрольных точек и точек поворота маршрута.
Вычислительные комплексы 15 и 26, базы данных 19 и 27, работающие параллельно, управляют через CAN-шину узлами 8-11, 13-16, 19, 20, 27, 35, 39, 42, 51, 52, 56 непосредственно, а узлами 41, 48, 55 через контроллеры 33, 47, 56. С упомянутых узлов и контроллеров через CAN-шину снимается информация об их работоспособности и на них через CAN-шину выдаются команды с блоков 15 или 26.
В сменные в зависимости от трассы движения программные модули 7 и 22 виртуальной карты маршрута при включенной аппаратуре ТС через шины ввода-вывода данных 23 и 24, например, построенные по протоколу Ethernet, дополнительно вводятся:
- координаты контрольных точек и точек поворота маршрута, светофоров, мостов, туннелей, металлических виадуков, пешеходных переходов, перекрестков, поворотов, станций 30 подзарядки и других придорожных объектов;
- номера и точные координаты мест установки пассивных отражателей 29;
- резервные маршруты для объезда пробок и мест аварий, включаемые по команде с центра управления, и соответствующие алгоритмы объезда;
- график работы светофоров по маршруту с привязкой к единому всемирному времени, синхронному с метками UTC глобальных навигационных спутниковых систем 16;
- алгоритм работы в караване;
- контуры отображения в информации тепловизора 14 участников дорожной сцены для идентификации типа объектов на маршруте в блоках 15 или 26 и другие.
Предлагаемая структурная схема интеллектуальной беспилотной системы управления движением ТС на электроплатформе 2 обладает высокой энергоэффективностью, точностью движения по маршруту, связью с центром управления, что отличает систему от существующих аналогов, обеспечивает функции электрических систем антиблокировки колес, стабилизации устойчивости с возможностью электронной блокировки программного межколесного и межосевого дифференциала колес.Система позволяет снизить количество компонентой базы для достижения управляемости и безопасности электромобиля и уменьшить износ тормозной системы.
Заявленное изобретение может быть изготовлено с использованием известных электронных и аппаратных средств и использовано в области электромобилестроения для легкового, пассажирского, грузового транспорта.
В качестве пассивных отражателей 29 могут быть использованы, например, отражатели, построенные аналогично судовым, выпускаемым английской фирмой «Фирделл Малтифлекторс». Они представляют собой комбинацию нескольких уголковых отражателей, скомпонованных таким образом, чтобы эффективный отраженный импульс был дан по всему горизонту даже при крене судна до 30° на любой борт. Такой отражатель практически не имеет «мертвых точек».
В настоящее время проведено объединение различных систем ТС, программного обеспечения, сенсоров и сети передачи данных в единую сеть на бортовой вычислительной системе, подготовлена электроплатформы для установки систем беспилотного управления движением.
При улучшении характеристик сенсоров, уменьшении времени обработки в них сигналов, сокращении времени реакции исполнительных устройств ТС, повышении информативности центра управления и выполнении других процедур в некоторых вариантах исполнения системы отдельные сенсоры и узлы могут отсутствовать.
Предлагаемая система для выполнения поставленной цели обеспечивает выполнение следующих функций:
- наблюдателя - осуществляет с помощью сенсоров;
- штурмана - выстраивает оптимальную траекторию движения ТС, предсказывает возможные варианты движения объектов на дорожной сцене;
- водителя - обеспечивает управление режимами работы двигателя и направлением движения ТС;
- топографа - формирует общую текущую дорожную сцену, планирует процедуры на следующий момент времени и осуществляет оценку его правильности в соответствии со сложившейся ситуацией.
В пути и при остановке на ТС программно выполняются действия, характерные действиям водителя в такой ситуации. Большинство узлов ТС применяются в известной системе ADAS (системе помощи водителю) и изготавливаются серийно [3].
Литература:
1. Патент на изобретение РФ №2006956, опубликован 30.01.1994.
2. Патент на изобретение РФ №2707429, опубликован 26.11.2019, Бюл. №33.
3. Рис. 2, л. 167. Труды НГТУ им. Р.Е. Алексеева №1 (120) Л. 165-174, 2018 (прототип).
4. Basler the power of sight [Электронный ресурс] URL: https://www.baslerweb.com/ru.
5. STEREOLABS [Электронный ресурс] URL: https://www.stereolabs.com.
6. HIGH PERFORMANCE MOTOR CONTROL [Электронный ресурс] URL: https://odriverobotics.com/.
7. Патент на изобретение РФ №2720216, опубликовано 28.04.2020, Бюл. №13.
8. М. Сколник Введение в технику радиолокационных систем. - М.: / Мир, 1965.
9. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
10. Orient Systems [Электронный ресурс]: [URL: http://www.orsvst.ru.
11. К.Э. Эрглис.Интерфейсы открытых систем. - М.: Горячая линия-Телеком, 2000. - 256 с.
12. А.А. Мячев. Интерфейсы средств вычислительной техники. Энциклопедический справочник. - М.: Радио и связь, 1993. - 350
13. Автоматизация обработки, передачи и отображения радиолокационной информации / Под общ. ред. В. Г. Корякова. - Москва: Сов. радио, 1975. - 303 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ БУРОВЫМИ РАБОТАМИ | 2021 |
|
RU2772455C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| Многофункциональный мобильный модуль для автоматического управления транспортным средством | 2022 |
|
RU2794386C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛНОПРИВОДНЫМ ЭЛЕКТРОМОБИЛЕМ | 2019 |
|
RU2707429C1 |
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| СПОСОБ КОРРЕКЦИИ ОШИБКИ ПОЗИЦИИ И УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ОШИБКИ ПОЗИЦИИ В АВТОМОБИЛЕ С СОДЕЙСТВИЕМ ВОЖДЕНИЮ | 2017 |
|
RU2738491C1 |
Изобретение относится к системам управления движением беспилотных транспортных средств. Система управления движением ТС с электроприводом содержит устройство зарядки аккумуляторных батарей и электроплатформу, основной бортовой компьютер, систему рулевого управления, контроллеры для электродвигателей, аппаратную часть системы определения обстановки вокруг беспилотного ТС, систему технического зрения, навигационную систему GNSS, пассивные отражатели радиосигналов радара заднего вида, расположенные за дорожной разметкой по всему маршруту следования беспилотного ТС, центр управления, который связан двухсторонними связями с основным и резервным компьютерами и соответствующим оборудованием обслуживаемой станции подзарядки беспилотных ТС, главный тормозной цилиндр и резервный бортовой компьютер. Шины внешнего ввода маршрутных данных и функционального контроля оборудования беспилотного ТС на стоянках подключаются к внешним вычислительным средствам ввода необходимой информации и функционального контроля оборудования беспилотного ТС. Достигается расширение функциональной надежности системы управления движением транспортных средств и повышение безопасности вождения ТС по маршруту. 3 ил.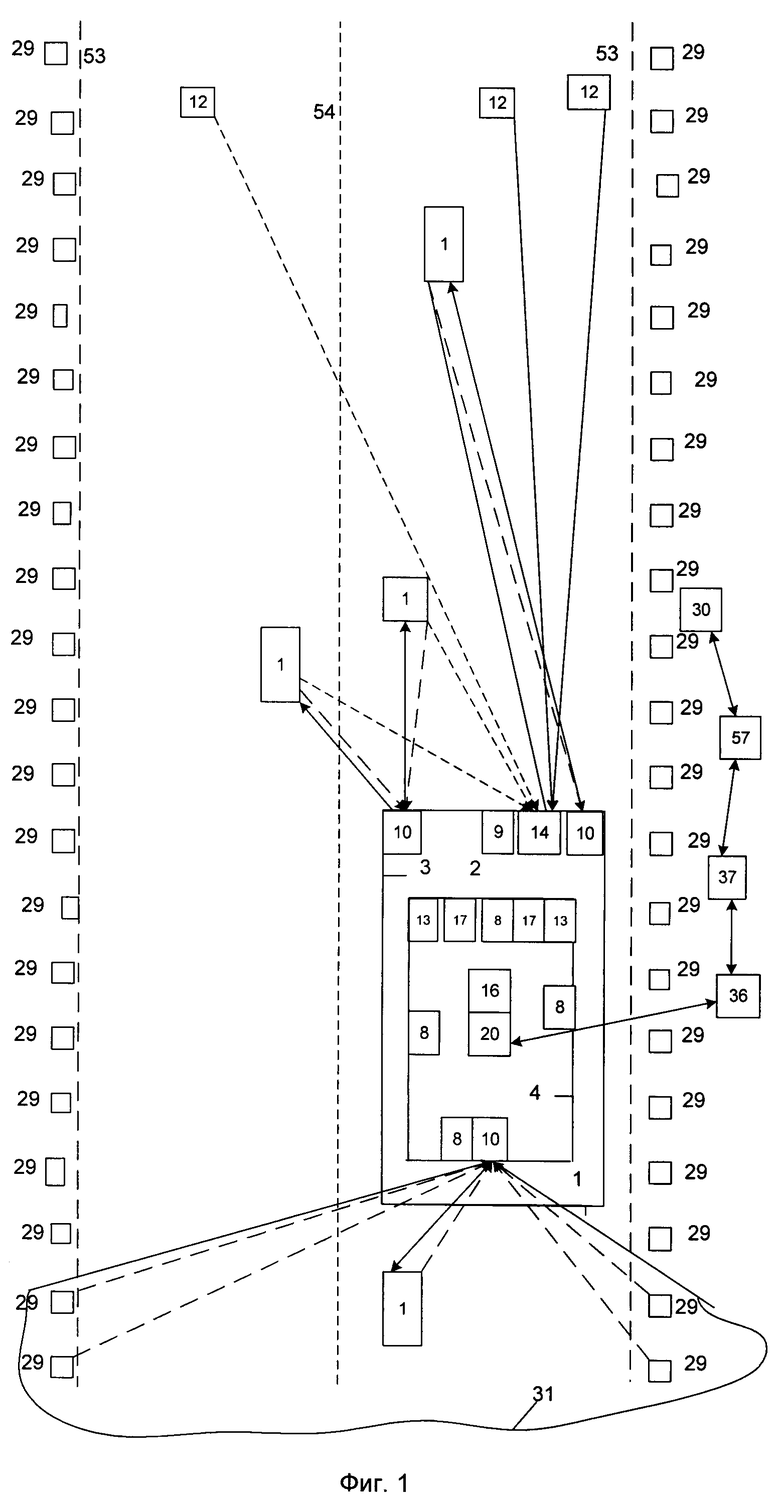
Система управления движением беспилотных транспортных средств (ТС) с электроприводом, содержащая устройство зарядки аккумуляторных батарей и электроплатформу, основной бортовой компьютер, обеспечивающий непрерывный сбор данных при движении, построение 3D-модели дорожной сцены, с дальнейшим сохранением и загрузкой в основную общую базу данных, систему рулевого управления с возможностью внешнего воздействия и подключения к модулю осуществления процедур системы ADAS и использования для управления поворотом ТС электромеханического рулевого механизма, контроллеры для электродвигателей, позволяющие регулировать положение, скорость и момент электродвигателя в соответствии с поступающими сигналами управления, аппаратную часть системы определения обстановки вокруг беспилотного ТС, содержащую лидары, расположенные по периметру беспилотного ТС, и мощный планарный лидар, установленный на уровне бампера, систему радаров ближнего и дальнего действия для оценки ситуации до препятствий в дальней зоне до 250 м, ультразвуковые датчики для оценки ситуации в ближней зоне до 3 м, систему технического зрения для распознавания участников дорожной сцены, в аппаратную часть которой входят видеокамеры и тепловизор, навигационную систему GNSS для позиционирования беспилотного ТС на местности, соединенную с основным бортовым компьютером через CAN-шину, и стереокамеры с высокопроизводительными видеокартами и вычислительными модулями для распознавания параметров дорожной сцены и объектов дорожного движения, при этом контроль рулевого управления осуществляется за счет изменения параметров вращения асинхронного электродвигателя, а управляющие сигналы передаются посредством общей архитектуры CAN-шины, которая связывает двухсторонними связями основной и резервный бортовые компьютеры с устройством зарядки аккумуляторных батарей, отличающаяся тем, что система включает пассивные отражатели радиосигналов радара заднего вида, расположенные за дорожной разметкой по всему маршруту следования беспилотного ТС, центр управления, который через первую группу базовых станций сотовой связи, приемопередатчик сотовой связи с антенной, устройство криптозащиты связан двухсторонними связями с переключателем непосредственно и через CAN-шину с основным и резервным компьютерами, а через вторую группу базовых станций сотовой связи - с соответствующим оборудованием обслуживаемой станции подзарядки беспилотных ТС, главный тормозной цилиндр, связанный механически с тормозным электродвигателем с редукторной частью, который соединен с контроллером тормозного электродвигателя и через него с CAN-шиной, при этом главный тормозной цилиндр связан гидравлическими связями с исполнительными цилиндрами, число которых равно числу мотор-колес, основной и резервный бортовые компьютеры с помощью CAN-шины соединены двухсторонними связями с основным и резервным программными модулями виртуальной карты маршрута, основной общей и резервной общей базой данных, приемопередатчиком сотовой связи с антенной, блоком формирования ортогональных кодов, контроллером асинхронного тягового мотор-колеса, переключателем, устройством криптозащиты, контактором, переключателями направления, коммутатором, термодатчиками, системой управления и контроля мотор-колес, контроллерами поворота, светотехническим оборудованием, блоком обработки сигналов радара заднего вида, контроллером тормозного электродвигателя, противопожарными датчиками, огнетушителями, связанными с соответствующими противопожарными датчиками, при этом шины внешнего ввода маршрутных данных и функционального контроля оборудования беспилотного ТС, связанные с основным и резервным бортовым компьютером соответственно, на стоянках подключаются к внешним вычислительным средствам ввода необходимой информации и функционального контроля оборудования беспилотного ТС, а для осуществления поворотов требуемый угол поворота мотор-колеса задается в цифровом виде с основного или резервного бортового компьютера через CAN-шину на контроллер поворота и через него на электродвигатель поворота с редукторной частью, установленный на стойке Макферсона, с помощью которой необходимое усилие передается на мотор-колесо, вращение которого в это время обеспечивается от электротехнической машины и тягового асинхронного электродвигателя с редукторной частью с помощью шарнира равных угловых скоростей, обеспечивающего передачу крутящего момента при углах поворота от 1 до 70° относительно оси.
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЧИСЛЕНИЯ ДАННЫХ ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ БЕСПИЛОТНОГО АВТОМОБИЛЯ | 2019 |
|
RU2757234C2 |
| RU 2778387 C2, 18.08.2022 | |||
| КОНТРОЛЛЕР ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ АВТОНОМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2705885C1 |

