Изобретение относится к области пневматических автоматических регуляторов.
Из уровня техники известен пневматический пропорционально-интегрально-дифференциальный (ПИД) регулятор, состоящий из мембранных пропорционально-интегрального (ПИ) регулятора и дифференцирующего звена, объединенных с помощью сумматора [1]. ПИ-регулятор включает в себя пропорциональное звено, содержащее элемент сравнения, в обратной связи которого расположен делитель, состоящий из переменного и постоянного сопротивлений, изменение соотношения проводимостей которых приводит к изменению коэффициента усиления разности входных давлений. Интегральное и дифференциальное звенья выполнены на базе апериодических звеньев, состоящих из постоянного объема и переменного сопротивления, изменяющего постоянную времени.
Недостатком такого ПИД-регулятора является низкие динамические характеристики, обусловленные постоянным воздействием на регулируемую величину контролируемого параметра и применением инерционных мембранных элементов.
Технический результат, который достигается в настоящем изобретении, заключается в повышении быстродействия регулирования за счет использования полупостоянно работающего регулятора, состоящего из линейных компенсационных схем, основанных на силовом действии струи на подвижную преграду.
Наиболее близким к предлагаемому решению по технической сущности прототипом является пропорциональный регулятор, состоящий из подвижной части, включающей в себя пластину, подвешенную на газовой опоре, входной дифференциальной пневматической схемы, считывающего элемента в виде узла типа «считывающее сопло-заслонка», пневматического мембранного усилителя мощности, при этом подвижная часть представляет собой пластину, жестко соединенную с двумя соплами газовой опоры, а считывающий элемент охвачен двумя соплами, расположенными до и после пневматического мембранного усилителя мощности, образующего регенеративную обратную связь с коэффициентом усиления, большим единицы. Обеспечивается повышение чувствительности и быстродействия за счет использования измерительной компенсационной схемы силового действия струи на подвижную преграду и регистрации этого воздействия с помощью пневматической компенсационной схемы [2].
Принципом работы указанного решения, как и настоящего изобретения, является применение измерительной компенсационной схемы, основанной на силовом действии струи на подвижную преграду, однако настоящее изобретение реализует работу регулятора по полному закону ПИД-регулирования, а также обеспечивает полупостоянный режим работы регулятора.
Более конкретно, технический результат достигается тем, что струйно-пневматический полупостоянно работающий пропорционально-интегрально-дифференциальный регулятор состоит из двух схем с идентичными чувствительными элементами, выполненными в виде пластин, подвешенных на газовых опорах, со считывающими устройствами, представленных узлами типа «сопло-заслонка», охваченные двумя компенсационными соплами, расположенными до и после пневматических мембранных усилителей мощности, образующих регенеративную обратную связь с коэффициентом усиления большим единицы, характеризуемый тем, что для повышения быстродействия путем отключения регулятора при изменении знаков ошибки и скорости он дополнен двумя струйно-мембранными схемами сравнения, оснащенными струйными пороговыми элементами, соединенными с выходом пропорционально-интегрально-дифференциального регулятора.
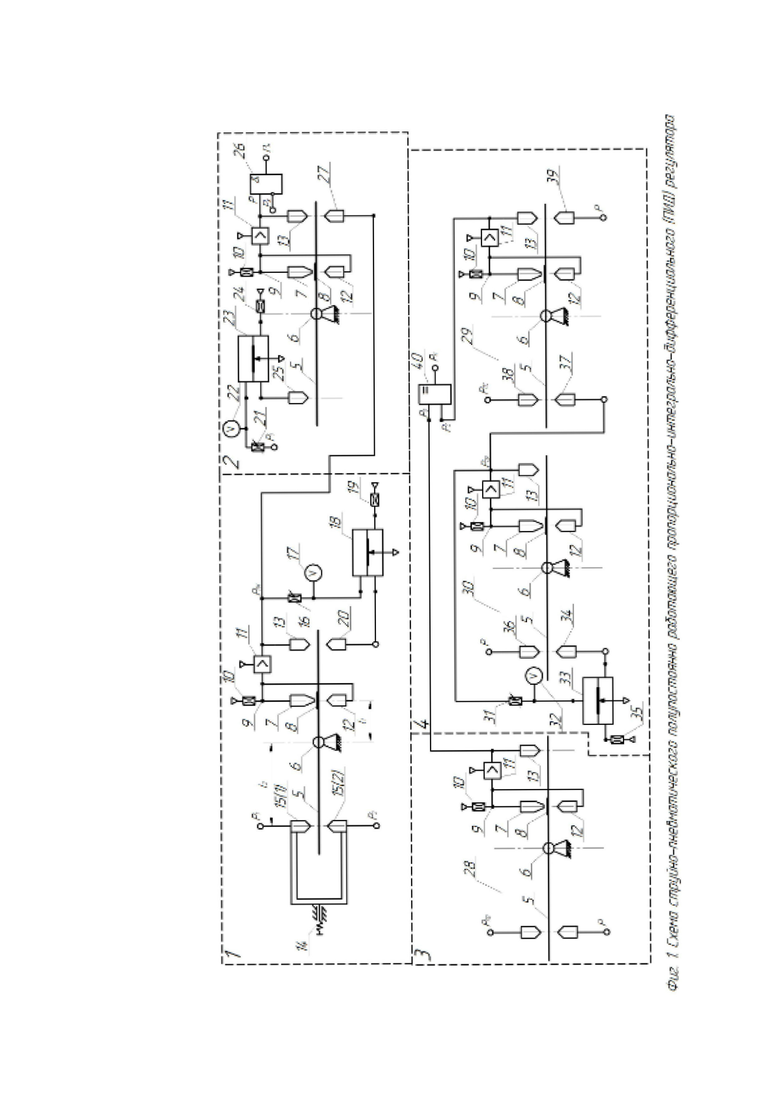
На фиг. 1 представлена схема струйно-пневматического полупостоянно работающего пропорционально-интегрально-дифференциального (ПИД) регулятора, состоящего из ПИ-регулятора 1 и дифференцирующего звена 2. Для отключения регулятора при появлении ошибки отклонения регулируемой величины и скорости от задания предусмотрены соответственно два узла 3 и 4 формирования управляющей команды  . Все блоки регулятора выполнены из идентичных по конструкции схем чувствительных элементов, усилителей и обратных связей, и имеют одинаковую нумерацию, входящих компонентов. Для регистрации угла поворота чувствительного элемента - пластины 5, закрепленный на газовой опоре 6 предусмотрен считывающий узел, выполненный в виде сопла 7 и заслонки 8, жестко закрепленной на пластине 5. Междроссельная камера 9, расположенная между соплом 7 и питающим дросселем 10, связана со входом усилителя мощности 11. Для компенсации силового действия струи, исходящей из сопла 7, предусмотрено компенсационное сопло 12, соединенное с междроссельной камерой 9. Выходной канал усилителя 11 соединен с соплом обратной связи 13. Сопло 7 совместно с усилителем 11 и соплом обратной связи 13 образует регенеративную обратную связь, устанавливающую нулевое состояние подвижной системы.
. Все блоки регулятора выполнены из идентичных по конструкции схем чувствительных элементов, усилителей и обратных связей, и имеют одинаковую нумерацию, входящих компонентов. Для регистрации угла поворота чувствительного элемента - пластины 5, закрепленный на газовой опоре 6 предусмотрен считывающий узел, выполненный в виде сопла 7 и заслонки 8, жестко закрепленной на пластине 5. Междроссельная камера 9, расположенная между соплом 7 и питающим дросселем 10, связана со входом усилителя мощности 11. Для компенсации силового действия струи, исходящей из сопла 7, предусмотрено компенсационное сопло 12, соединенное с междроссельной камерой 9. Выходной канал усилителя 11 соединен с соплом обратной связи 13. Сопло 7 совместно с усилителем 11 и соплом обратной связи 13 образует регенеративную обратную связь, устанавливающую нулевое состояние подвижной системы.
Изменение коэффициента усиления  ПИ-регулятора достигается путем вращения винта 14 и последующим изменением соотношения плеч
ПИ-регулятора достигается путем вращения винта 14 и последующим изменением соотношения плеч  и
и  , определяющих соответственно расстояния от осей симметрии газовой опоры 6 до входных сопел 15 и от газовой опоры 6 до сопла 7.
, определяющих соответственно расстояния от осей симметрии газовой опоры 6 до входных сопел 15 и от газовой опоры 6 до сопла 7.
Интегральное звено, расположенное в положительной обратной связи пропорционального П-регулятора, включает в себя переменное сопротивление 16, емкость 17, точный повторитель 18, на который подано давление питания через постоянный дроссель 19. Выходной канал повторителя 18 соединен с соплом 20. Изменением проводимости  переменного сопротивления 16 можно менять постоянную времени интегрирования:
переменного сопротивления 16 можно менять постоянную времени интегрирования:
 (1)
(1)
где  - объем емкости 17,
- объем емкости 17,  - универсальная газовая постоянная,
- универсальная газовая постоянная,  - абсолютная температура.
- абсолютная температура.
Дифференцирующее звено 2 состоит из переменного сопротивления 21, емкости 22, точного повторитель 23, на который подано давление питания через постоянный дроссель 24. Выходной канал повторителя 23 соединен с соплом 25. Изменением проводимости  переменного сопротивления 21 можно менять постоянную времени дифференцирования:
переменного сопротивления 21 можно менять постоянную времени дифференцирования:
 (2)
(2)
где  - объем емкости 22.
- объем емкости 22.
Выход дифференцирующего звена 2 соединен с элементом 26, работающим по функции «Запрет», на второй вход которого подан запрещающий сигнал от узла 4. Выходной сигнал  ПИ-регулятора соединен с соплом 27 дифференцирующего звена 2, выполняющего в этом случае роль сумматора.
ПИ-регулятора соединен с соплом 27 дифференцирующего звена 2, выполняющего в этом случае роль сумматора.
Выходной сигнал  ПИД-регулятора равен:
ПИД-регулятора равен:
 (3)
(3)
где  - разность давлений на входе в ПИ-регулятор.
- разность давлений на входе в ПИ-регулятор.
Формула (3) отражает закон ПИД-регулирования.
Узлы 3 и 4 состоят из двух пороговых элементов сравнения 28 и 29 и блока предварения 30.
Пороговый элемент сравнения 28 определяет знак ошибки между опорным давлением  и выходным давлением регулятора
и выходным давлением регулятора  . При положительном знаке ошибки
. При положительном знаке ошибки  выходной сигнал порогового элемента сравнения 28 выдает сигнал
выходной сигнал порогового элемента сравнения 28 выдает сигнал  . При отрицательном -
. При отрицательном -  - выдается сигнал
- выдается сигнал  .
.
Узел 4 формирования управляющей команды на отключение регулятора при отклонении регулируемой скорости от задания состоит из порогового элемента 29 и блока предварения 30. Блок предварения 30 включает в отрицательную обратную связь интегральное звено, состоящее из переменного сопротивления 31, устанавливающего постоянную времени предварения, емкости постоянного объема 32, точного расходного повторителя 33 и выходного сопла 34, расположенного нормально к пластине 5. Питание точного повторителя осуществляется через постоянный дроссель 35. Входное сопло 36 блока предварения 30 связано с выходом регулятора , а выход блока предварения 30 равен:
 , (4)
, (4)
где  - постоянная времени блока предварения 30;
- постоянная времени блока предварения 30;  - объем емкости 32; - проводимость переменного сопротивления 31.
- объем емкости 32; - проводимость переменного сопротивления 31.
Выходной канал блока предварения 30 связан с соплом 37 порогового элемента сравнения 29, на который поступает пороговый сигнал  через сопло 38. Чтобы сократить выходной сигнал в формуле (4) к входу порогового элемента 29, который выполняет также роль сумматора, подается выходной сигнал регулятора .
через сопло 38. Чтобы сократить выходной сигнал в формуле (4) к входу порогового элемента 29, который выполняет также роль сумматора, подается выходной сигнал регулятора .
Положительному знаку скорости соответствует выходной сигнал порогового элемента 29  , отрицательному -
, отрицательному -  .
.
Оба дискретных сигнала с двух элементов сравнения  и
и  поступают на вход элемента 40, реализующего функцию равнозначности:
поступают на вход элемента 40, реализующего функцию равнозначности:
 (5)
(5)
Сигнал служит командой, определяющей условия отключения регулятора с помощью элемента 26, работающему по функции «Запрет». При  , когда знаки ошибки
, когда знаки ошибки  и ее скорости
и ее скорости  не совпадают, то есть
не совпадают, то есть  , регулируемая величина приближается к заданному значению. При
, регулируемая величина приближается к заданному значению. При  , когда знаки
, когда знаки  и совпадают (
и совпадают ( ), регулируемая величина удаляется от заданного значения.
), регулируемая величина удаляется от заданного значения.
Источники информации
[1] Дмитриев В.Н., Градецкий В.Г. Основы пневмоавтоматики. М.: «Машиностроение», 1973. С. 197-199.
[2] Патент РФ № 2018116604, 04.05.2018. Струйно-пневматический пропорциональный регулятор // Патент России № 2676362, 28.12.2018. Бюл. № 1 / Макаров В.А., Королев Ф.А., Тютяев Р.Е., Макаров А.В.
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйно-фотокомпенсационный полупостоянно работающий пропорционально-интегрально-дифференциальный (ПИД) регулятор | 2022 |
|
RU2788576C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2021 |
|
RU2773233C1 |
| СТРУЙНО-ФОТОКОМПЕНСАЦИОННЫЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2022 |
|
RU2788575C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР | 2021 |
|
RU2768107C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР | 2021 |
|
RU2773115C1 |
| Струйно-фотокомпенсационный полупропорциональный регулятор | 2022 |
|
RU2788577C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2021 |
|
RU2773623C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ БЛОК ПРЕДВАРЕНИЯ И ДИФФЕРЕНЦИРОВАНИЯ | 2021 |
|
RU2786624C1 |
| Струйно-пневматическая система регулирования соотношения двух параметров | 2023 |
|
RU2817551C1 |
| Струйно-фотокомпенсационный пропорционально-интегрально-дифференциальный (ПИД) регулятор | 2022 |
|
RU2781762C1 |
Изобретение относится к автоматическим регуляторам. Струйно-пневматический полупостоянно работающий пропорционально-интегрально-дифференциальный регулятор состоит из двух схем ПИ-регулятора и дифференцирующего звена с чувствительными элементами. Элементы выполнены в виде пластин, подвешенных на газовых опорах, со считывающими устройствами, представленными узлами типа «сопло-заслонка», охваченными двумя компенсационными соплами, расположенными до и после пневматических мембранных усилителей мощности, образующих регенеративную обратную связь с коэффициентом усиления, большим единицы. Для отключения регулятора при изменении знаков ошибки и скорости он дополнен двумя струйно-мембранными пороговыми элементами и одним блоком предварения, соединенными с выходом пропорционально-интегрально-дифференциального регулятора. Повышается быстродействие регулятора. 1 ил.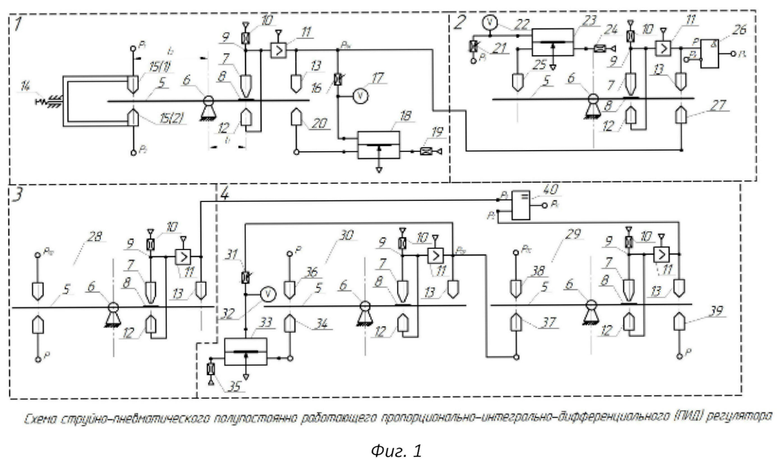
Струйно-пневматический полупостоянно работающий пропорционально-интегрально-дифференциальный (ПИД) регулятор состоит из двух схем ПИ-регулятора и дифференцирующего звена с идентичными чувствительными элементами, выполненными в виде пластин, подвешенных на газовых опорах, со считывающими устройствами, представленными узлами типа «сопло-заслонка», охваченные двумя компенсационными соплами, расположенными до и после пневматических мембранных усилителей мощности, образующих регенеративную обратную связь с коэффициентом усиления, большим единицы, характеризующийся тем, что для отключения регулятора при изменении знаков ошибки и скорости он дополнен двумя струйно-мембранными пороговыми элементами и одним блоком предварения, соединенными с выходом пропорционально-интегрально-дифференциального регулятора.
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР | 2018 |
|
RU2676362C1 |
| Интегральный регулятор Негоды | 1990 |
|
SU1805447A1 |
| 0 |
|
SU160391A1 |

