Изобретение относится к области применения электротехники и электроники в судостроении и может быть использовано для катодной защиты подводной части корпусов морских судов, нефтегазодобывающих платформ, плавучих электростанций и других морских сооружений от коррозии.
В настоящее время для предотвращения коррозии подводной части корпусов морских судов широко используются системы катодной защиты (СКЗ), которые обеспечивают поддержание требуемого защитного потенциала корпуса судна за счет автоматического регулирования электрического тока, протекающего между погруженным в воду анодом и корпусом судна.
Принцип действия систем катодной защиты (Коррозия и защита судов: Справочник / Люблинский ЕЯ. и др. - Л.: Судостроение, 1987. - 376 с.; Бибиков Н.Н., Люблинский Е.Я., Поварова Л.В. Электрохимическая защита морских судов от коррозии. - М: Металлургия, 1987. - 96 с.) основан на способности металла, погруженного в морскую воду, переходить в пассивное состояние при смещении его потенциала в отрицательную сторону от стационарного значения.
Для эффективного функционирования СКЗ должны обеспечивать как высокоточное задание требуемого значения защитного потенциала корпуса судна, так и высокоточное автоматическое поддержание текущего значения защитного потенциала на уровне его требуемого значения с ошибкой, не превышающей 1% от требуемого значения защитного потенциала, на основании сравнения текущего значения потенциала, снимаемого с установленного на корпусе судна электрода сравнения, с заданным требуемым значением.
Известны системы катодной защиты от коррозии металлоконструкции, преимущественно корпуса судна (RU 2110616 С1, 1998; RU 2110617 С1, 1998; RU 2215823 С1, 2003), которые в общей для них части содержат управляемый источник постоянного тока (преобразователь), отрицательный и положительный полюсы которого подключены к корпусу судна и аноду, соответственно, выполняющий роль датчика текущего значения потенциала корпуса корабля электрод сравнения, источник уставки защитного потенциала и блок управления.
Количество анодных узлов, управляемых преобразователей, распределительных щитов и датчиков потенциала зависит от водоизмещения корабля.
Например, для корабля водоизмещением 12000 тонн система катодной защиты (СКЗ) состоит из 14 анодов, подключаемых к двум преобразователям, которые подразделены на равные по количеству анодов анодные узлы. Количество анодных узлов равно числу преобразователей. На каждый анодный узел предусмотрено два датчика потенциала - основной и резервный. Для каждого анодного узла предусмотрен распределительный щит, к которому подключен кабель от плюсового полюса преобразователя и кабели от анодных узлов. Площадь сечения электрических кабелей, подключаемых к анодам, рассчитывают с учетом длины трассы, исходя из условия допустимых потерь напряжения в кабеле не более 5% от номинального выходного напряжения преобразователя, причем сопротивление кабеля, подключаемого к отдельным анодам, выбирают таким, чтобы величина тока каждого анода отличалась не более чем на 20% от средней величины токов анодов, а разброс силы тока в цепях разных анодов не превышал 30%. Эти требования вызваны ограничениями по регулированию токами анодов, которое производят через распределительный щит электропитания. Такую структуру построения СКЗ продолжают применять на кораблях.
Основным недостатком таких систем катодной защиты является недостаточная точность установки защитного потенциала, связанная с отсутствием возможности независимого регулирования тока каждого анода. Это обстоятельство усложняет процесс установки и особенно корректировки токов анодов в процессе эксплуатации, которые ограничены номинальным током преобразователя, что в конечном итоге, снижает эффективность катодной защиты, так как пониженный защитный потенциал приводит к возникновению коррозии металла, а при завышении защитного потенциала начинается процесс насыщения металла водородом, вызывающий разрушение металлоконструкции.
Широко известна СКЗ, разработанная ЦНИИ КМ «Прометей» для атомных ледоколов (журнал «Судостроение» №6 за 2015 г., «Параметры и опыт эксплуатации в арктических условиях систем катодной защиты от коррозионно-эрозионных разрушений корпусов атомных ледоколов», авторы Ю.Л. Кузьмин, д.т.н. О.А. Ставицкий, А.В. Подшивалов). Эта СКЗ включает в себя 38 анодов и 16 электродов сравнения. Аноды разделены на восемь узлов, и все аноды одного узла подключены к одному преобразователю. Эта СКЗ по своей структуре и функциональным возможностям аналогична системам, описанным выше, поэтому возможности регулирования токами анодов также ограничены. Однако, в отличие от предыдущих СКЗ, анодные узлы включают в себя 2-3 анода, что при 16 электродах сравнения позволяет более точно и своевременно отслеживать уровни защитных потенциалов, но коррекция токов анодов проводится по усредненному показателю для всей поверхности, которую охватывает анодный узел.
Следует отметить, что для СКЗ основной характеристикой защищаемой от коррозии поверхности, находящейся в морской воде, является удельная катодная поляризуемость «b» (Ом⋅м2), которая в процессе эксплуатации снижается. Например, как было зарегистрировано во время проведения эксплуатационных испытаний СКЗ, установленной на атомных ледоколах, в начале эксплуатации этот параметр составлял 2-3 Ом⋅м2, а через 1,5 года 0,5-0,6 Ом⋅м2. При этом потенциал защищаемой поверхности, измеренный электродами сравнения, и токи анодов соответственно изменяли относительно первоначально установленных значений.
Значительный разброс поляризуемости защищаемой от коррозии поверхности особенно часто наблюдается на кораблях с большой подводной поверхностью, что вызвано неравномерным износом лакокрасочного покрытия, механическими повреждениями, как это ярко проявляется на корпусах ледоколов, а также анизотропией металла корпуса и рядом других факторов. В результате, при обобщении данных предшествующего периода эксплуатации, определяют среднее значение удельной катодной поляризуемости поверхности каждого анодного узла и корректируют величину средней плотности тока (А/м2), исходя из технических возможностей управления токами анодов, ток которых не может превышать номинальный ток преобразователя. Такой критерий регулирования защитного потенциала в процессе эксплуатации становится не эффективным, так как является избыточным для одних участков защищаемой поверхности и недостаточным для других. В тоже время СКЗ должна обеспечивать, в течение всего срока эксплуатации, непрерывную по времени и достаточную катодную поляризацию всей защищаемой поверхности, а не отдельных участков, таким образом, чтобы значения защитного потенциала по абсолютной величине находились в пределах не меньше Uмин и не более Uмax. В процессе работы СКЗ изменения защитного потенциала допускаются в диапазоне от минус 0,2 В до минус 1,5 В.
В целом, существующие корабельные СКЗ по своему структурному построению, а именно, объединению анодов в узлы и подаче питания на каждый анодный узел через распределительный щит электропитания от одного преобразователя и регулированию защитного потенциала в процессе эксплуатации по усредненной величине катодной поляризуемости поверхности, защищаемой током анодного узла, не обеспечивают достаточную защиту корпуса корабля при проявлении локальных видов коррозии, таких как язвенная, щелевая, контактная и других, которые выявляются при осмотре во время докования корабля.
Наиболее близким по своей технической сущности аналогом (прототипом) по отношению к предлагаемой СКЗ является известное средство для катодной защиты от коррозии металлоконструкций, находящихся в воде по патенту RU №201537, опубл. 21.12.2020 г., МПК C2F13/04, содержащее электрод сравнения, анод, преобразователь, выполненный по схеме ШИМ-инвертора, блок управления и индикации и датчики тока и напряжения. Информационный обмен между узлами средства осуществляют в цифровом виде с использованием микроконтроллеров, что позволяет отслеживать защитный потенциал металлоконструкций с высокой точностью. Недостатком данного устройства, как и вышеописанных СКЗ, является недостаточная точность установки и поддержания защитных потенциалов для локальных участков поверхности корпуса корабля в зависимости от их поляризуемости, снижающая общую эффективность защиты корпуса корабля от коррозии.
В связи с этим потребовалось решение технической проблемы, заключающейся в повышении эффективности защиты корпуса корабля от коррозии в соответствии с современными требованиями по обеспечению точности установки и поддержания значений защитного потенциала корпуса корабля.
Техническим результатом предложенного изобретения является повышение эффективности защиты корпуса корабля от коррозии за счет повышения точности установки и поддержания текущих значений защитных потенциалов на локальных участках поверхности в зависимости от их способности к поляризации.
Указанный технический результат достигается тем, что система катодной защиты корпуса корабля от коррозии, содержащая электроды сравнения, аноды и контроллер, первый вход-выход которого соединен с входом-выходом блока управления и индикации, снабжена модулем сопряжения с системой управления корабля, вход-выход которого подключен ко второму входу-выходу контроллера, модулем управления токами преобразователей, первый вход-выход которого подключен к третьему входу-выходу контроллера, а второй вход-выход подключен к общей шине управления токами преобразователей автономного питания анодов, модулем потенциалов, первый вход-выход которого подключен к четвертому входу-выходу контроллера, а второй вход-выход подключен к общей шине потенциалов, преобразователями автономного питания анодов, выход каждого из которых соединен с соответствующим анодом, а вход подключен к соответствующему входу-выходу общей шины управления токами преобразователей автономного питания анодов, и цифровыми датчиками потенциала корпуса корабля, вход каждого из которых подключен к выходу соответствующего электрода сравнения, а выход подключен к соответствующему входу-выходу общей шины потенциалов.
Благодаря новой совокупности существенных признаков в заявляемой системе катодной защиты корпуса корабля от коррозии определяется совокупное влияние токов близко расположенных анодов на потенциал каждого локального участка поверхности и обеспечивается автономное регулирование токов преобразователей с высокой точностью, соответствующей заданному защитному потенциалу локального участка поверхности.
Заявляемая система катодной защиты корпуса корабля от коррозии поясняется чертежами, на которых показаны:
на фиг. 1 - структурная схема СКЗ корпуса корабля от коррозии;
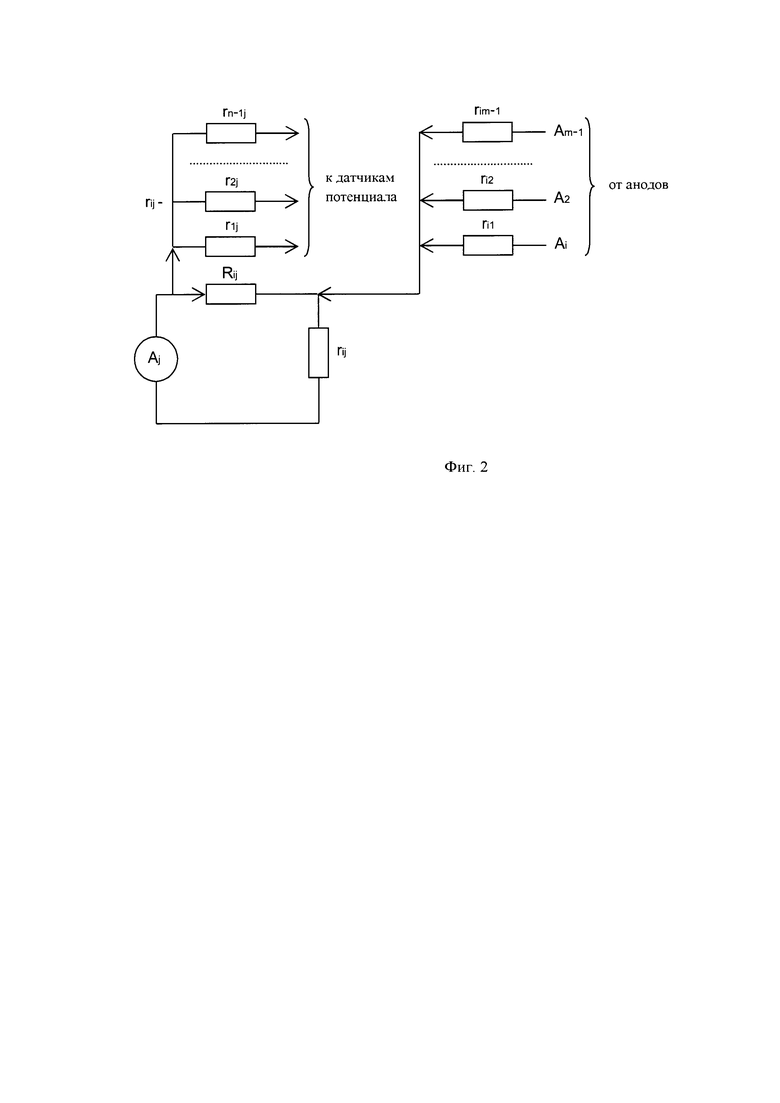
на фиг. 2 - общая эквивалентная электрическая схема СКЗ корпуса корабля от коррозии;
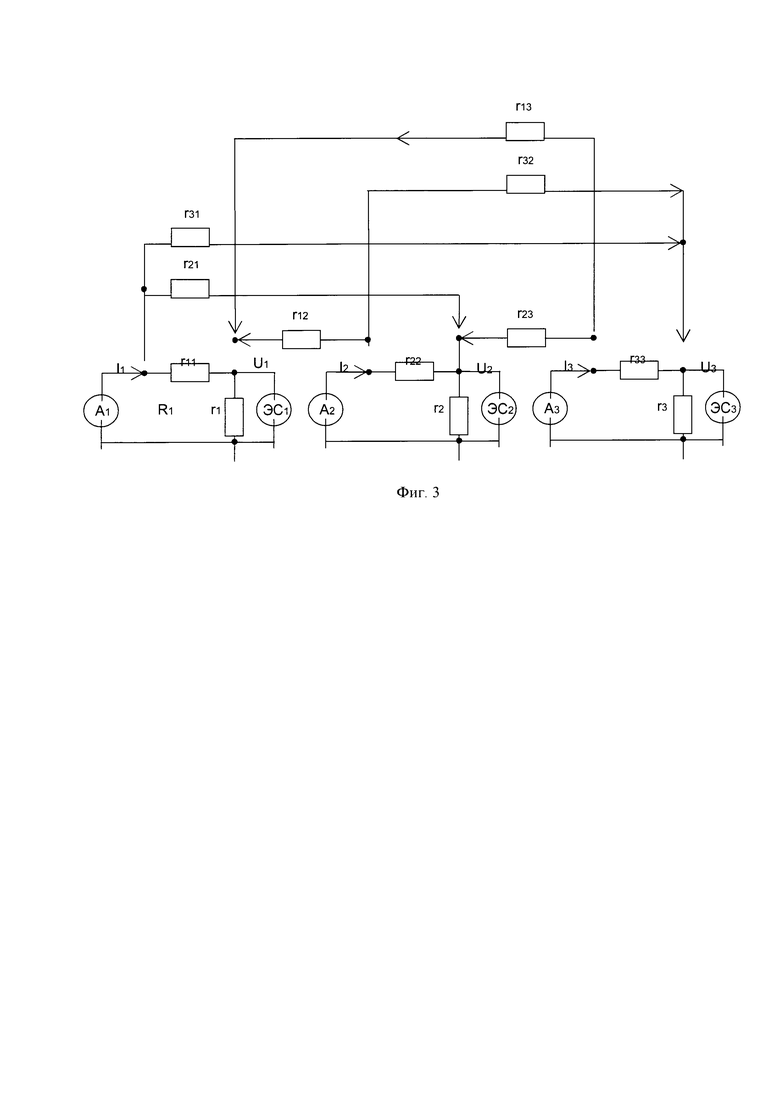
на фиг. 3 -эквивалентная электрическая схема для СКЗ корпуса корабля от коррозии с тремя цифровыми датчиками потенциала и тремя анодами.
Заявляемая система катодной защиты корпуса корабля от коррозии, показанная на фиг. 1, состоит из анодов (6), каждый из которых соединен с преобразователем автономного питания анода (7), вход которого подключен к общей шине управления токами преобразователей автономного питания анодов (8), вход-выход которой подключен к модулю управления токами преобразователей (4). К каждому электроду сравнения (11) подключен цифровой датчик потенциала корпуса корабля (10), вход которого подключен к общей шине потенциалов (9), вход-выход которой подключен к модулю потенциалов (5). Вход-выход модуля управления токами преобразователей (4), вход-выход модуля потенциалов (5) и вход-выход блока управления и индикации (2) подключены каждый к соответствующему входу-выходу контроллера (3), выполненного на базе микропроцессора, при этом контроллер (3) соединен с модулем сопряжения с системой управления корабля (1).
Входящие в СКЗ корпуса корабля от коррозии элементы имеют следующее назначение.
Модуль сопряжения с системой управления корабля (1) предназначен для передачи информации о состоянии СКЗ в автоматизированную систему управления корабля и получения данных об удельной электропроводности морской воды в регионах нахождения судна, которые через контроллер (3) поступают на пульт управления и индикации (2). Данный модуль представляет собой элемент цифрового сопряжения, выполненный на базе типового микроконтроллера, и может быть конструктивно объединен с контроллер (3) через порт с интерфейсом типа USB и др.
Блок управления и индикации (2) предназначен для установки и отображения значений токов анодов, задания защитных потенциалов, их корректировки и индикации в процессе эксплуатации. Блок управления и индикации (2) содержит элементы для ввода данных о потенциалах, токах, напряжениях и табло, отображающее состояние СКЗ. Обеспечивает отображение данных, поступающих от системы управления корабля. Блок управления и индикации (2) может быть реализован с использованием микропроцессора и на типовых элементах, а конструкция выполнена в соответствии с требованиями, предъявляемыми к аппаратуре корабля.
Контроллер (3) предназначен для реализации алгоритма работы системы катодной защиты и обеспечивает информационный обмен между блоком управления и индикации (2) и модулем сопряжения с системой управления корабля (1). Программное обеспечение блока содержит специальные программные модули, устанавливающие циклы проведения опросов датчиков потенциалов, статической обработки и опросов преобразователей. Блок может быть реализован на типовом управляющем микроконтроллере типа 1986 ВЕ91 с встроенной FLASH-памятью программ и ОЗУ с 12-разрядными АЦП и ЦАП, периферийными интерфейсами USB, UART, SPI и др.
Модуль управления токами преобразователей (4) предназначен для передачи и приема через общую шину управления токами преобразователей автономного питания анодов (8) адресных команд на установку токов преобразователей автономного питания анодов (7), автоматического поддержания токов в заданных пределах и содержит элементы сопряжения с общей шиной управления токами преобразователей автономного питания анодов (катодный повторитель).
Модуль потенциалов (5) принимает адресные сообщения о потенциалах от цифровых датчиков потенциала корпуса корабля (10) во временном цикле, заданном контроллером (3), и состоит из микроконтроллера и элемента сопряжения (согласующего элемента) с общей шиной потенциалов (9).
Общая шина управления токами преобразователей автономного питания анодов (8) и общая шина потенциалов (9) обеспечивают индивидуальное селективное получение адресных команд преобразователями и прием адресных сообщений о потенциалах, фиксируемых цифровыми датчиками потенциала корпуса корабля из общих потоков команд и сообщений.
В качестве преобразователей автономного питания анодов (7) используют управляемые источники питания с регулируемым в цифровом виде выходным напряжением от 12 В до 24 В, с точностью поддержания тока около 1% в пределах диапазона регулирования, в редких случаях до 36 В с выходным током до 40 А с электропитанием от сети ~3x380 В, например, типа МАА 900-1Т1224 БКЮС.436610.007 ТУ с регулируемым выходным напряжением от 12 В до 24 В и выходным током до 37,5 А, так же могут быть применены регулируемые источники с ПШМ-модуляцией.
Для кораблей различного водоизмещения и назначения при проектировании СКЗ могут быть установлены типовые или специальные аноды, как это сделано на ледоколах, хлорсеребряные электроды сравнения типа ЭСХП-СЛ и другие, которые устанавливают на внешней стороне корпуса и непосредственно или кабелем соединяют с цифровым датчиком, гальванически развязанным от электросети корабля, и также соединенным с общей шиной потенциалов (9). Цифровой датчик потенциала корпуса корабля (10) содержит АЦП и элементы усиления потенциала и электропитания.
На фиг. 3 показана эквивалентная электрическая схема заявляемой СКЗ корпуса корабля от коррозии для частного случая использования трех цифровых датчиков потенциала и трех анодов. Эта схема составлена, исходя из свойств дуальности (взаимообратимости) двухполюсников, а нагрузка каждого анода представлена параллельным соединением сопротивлений растекания тока каждого анода по локальным участкам поверхности, на которых размещены цифровые датчики потенциалов.
Исходя из предположения о том, что токи анодов складываются в каждой точке поверхности, и цифровой датчик потенциала фиксирует потенциал, пропорциональный сумме протекающих токов преобразователей, СКЗ может быть адекватно представлена следующей системой линейных уравнений (СЛУ):
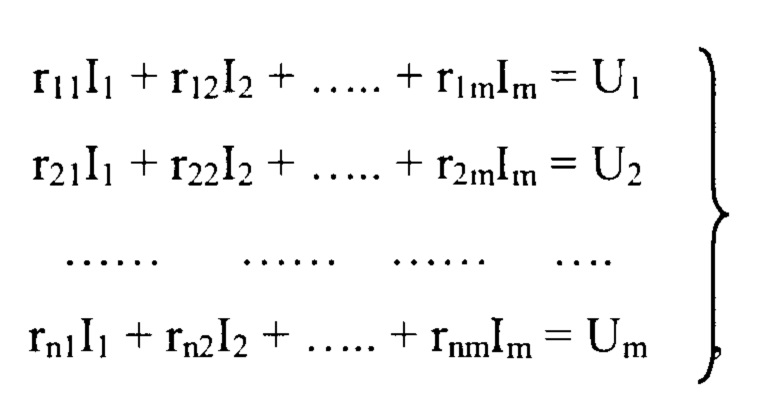
где:
-n и m - соответственно количество цифровых датчиков потенциалов и анодов в СКЗ;
- Ij - ток j-oго анода;
- rij - сопротивление растекания тока «j»-ого анода в цепи «i»-ого цифрового датчика потенциала (переходное сопротивление);
- Ui…Um - защитные потенциалы.
При малых значениях отдельных переходных сопротивлений для удаленных участков поверхности данная система линейных уравнений распадается на ряд независимых уравнений и порядок системы понижается.
Поясним это. Пусть в результате проведения измерений, например, на этапе пуско-наладочных работ СКЗ на объекте, были получены следующие данные для одного из фрагментов защищаемой поверхности: r11=0,3 Ом, r22=0,025 Ом и r33=0,02 Ом, r12=r21=r31=r13=r23=r32=0,01 Ом и все другие переходные сопротивления, связанные с токами других анодов, были приравнены нулю.
Значения приведенных к сопротивлению растекания тока преобразователя защитных потенциалов определены и равны соответственно: U1=0,7 В, U2=0,8 В, U3=0,6 В.
Введение приведенных защитных потенциалов к сопротивлению растекания тока преобразователя обуславливается тем, что фиксируемые цифровыми датчиками потенциалы уровней индицируют только части растекающегося по локальному участку поверхности тока, но весь ток не пропускают.
Используя вышеуказанные данные, составим СЛУ для данного фрагмента защищаемой поверхности:

Подставляя данные и решая эту СЛУ, например по методу Крамера, получаем искомые токи анодов I1=22,l А, I2=32,1 А, I3=19,4 А (определитель D=144,5⋅10-6, дополнительные определители: D1=32⋅104, D2=2,33⋅10-4 и D3=28⋅10-6, Ii=Di/D).
Заявляемая система катодной защиты корпуса корабля от коррозии работает следующим образом.
Первоначально, при вводе СКЗ корпуса корабля в эксплуатацию, не включая преобразователей, определяют стационарные потенциалы корпуса корабля в местах размещения цифровых датчиков потенциалов корпуса корабля, и эти значения вводят в контроллер через блок управления и индикации. Далее производят последовательное включение/выключение каждого преобразователя, определяют значения потенциалов по всем датчикам и вводят их в контроллер. Таким образом определяют растекание тока каждого преобразователя по локальным участкам корпуса корабля и вычисляют переходные сопротивления между анодами и датчиками. На фиг. 2 показана общая эквивалентная электрическая схема СКЗ корпуса корабля от коррозии, из которой следует, что переходные сопротивления между i-ым датчиком и j-ым анодом rij=rj/ku, где ku - коэффициент передачи по напряжению между ними, ri - внутреннее сопротивление датчика потенциала. Далее устанавливают защитные потенциалы для всех локальных участков поверхности корпуса корабля, исходя из значений стационарных потенциалов, вводят их в контроллер и вычисляют необходимые величины токов каждого преобразователя, используя расчетный программный модуль контроллера. Полученные величины токов передают на вход модуля управления токами преобразователей.
Модуль управления токами преобразователей поочередно по заданному контроллером циклу считывает с преобразователей в цифровом виде текущие значения токов, которые поступают на его вход-выход через общую шину управления токами преобразователей автономного питания анодов и контроллер этого модуля сравнивает текущее значение тока с заданием, поступившим на его вход из контроллера, и после вычисления разности в значениях изменяет ток преобразователя таким образом, чтобы свести эту разность токов к нулевому значению.
Изолированный от корпуса корабля анод с развитыми геометрическими размерами создает зону растекания тока благодаря электропроводности морской воды и тем самым сдвигает потенциал этой части поверхности корпуса корабля. Размещенный на удалении от анода цифровой датчик потенциала корпуса корабля преобразует в цифровой вид значение потенциала корпуса корабля и по гальванически развязанной цепи передает значение потенциала через общую шину потенциалов на вход-выход модуля потенциалов, который соединен с контроллером.
Электрод сравнения является высокочувствительным элементом системы катодной защиты, подвержен влиянию корпусных помех, обладает высоким входным сопротивлением от десятков кОм и более и по этой причине его показания подвержены значительным флуктуациям. Для получения стабильных показаний цифровых датчиков потенциала корпуса корабля контроллером задается временной цикл опроса всех датчиков СКЗ. Полученные таким образом массивы показаний датчиков интегрируют в модуле потенциалов на значительном временном интервале (порядка нескольких минут) с исключением отдельных статически выпадающих значений, и по команде со стороны контроллера данные о потенциалах с выхода модуля потенциалов поступают в контроллер.
Общий алгоритм регулирования токов преобразователей заключается в выполнении последовательных итераций с отслеживанием цифровыми датчиками сдвигов защитных потенциалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ДЛЯ КАТОДНОЙ ЗАЩИТЫ ЖЕЛЕЗОБЕТОННЫХ КОНСТРУКЦИЙ | 2022 |
|
RU2815967C1 |
| Цифровой датчик потенциала корпуса корабля | 2020 |
|
RU2759821C1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ УСТАНОВКАМИ КАТОДНОЙ ЗАЩИТЫ МАГИСТРАЛЬНЫХ ГАЗОПРОВОДОВ | 2013 |
|
RU2540847C2 |
| Система электрохимической защиты судна от коррозии | 2023 |
|
RU2802605C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ СТАНЦИЙ КАТОДНОЙ ЗАЩИТЫ | 1991 |
|
RU2006953C1 |
| Устройство контроля и коммутации электродов сравнения | 2021 |
|
RU2791539C2 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВЫХОДНОГО ТОКА СИСТЕМЫ КАТОДНОЙ ЗАЩИТЫ ОТ КОРРОЗИИ МЕТАЛЛОКОНСТРУКЦИЙ | 2015 |
|
RU2618968C1 |
| Система дистанционного контроля состояния подземных трубопроводов | 2019 |
|
RU2701706C1 |
| Автономное устройство для катодной защиты подземных сооружений | 2017 |
|
RU2690261C1 |
| СИСТЕМА АВАРИЙНОГО УПРАВЛЕНИЯ СТАНЦИЕЙ КАТОДНОЙ ЗАЩИТЫ | 2022 |
|
RU2783437C1 |

Изобретение относится к области применения электротехники и электроники в судостроении и может быть использовано для катодной защиты подводной части корпусов морских судов, нефтегазодобывающих платформ, плавучих электростанций и других морских сооружений от коррозии. Система содержит электроды сравнения, аноды, контроллер и блок управления и индикации, при этом она снабжена модулем сопряжения с системой управления корабля, вход-выход которого подключен ко второму входу-выходу контроллера, модулем управления токами преобразователей, первый вход-выход которого подключен к третьему входу-выходу контроллера, а второй вход-выход подключен к общей шине управления токами преобразователей автономного питания анодов, модулем потенциалов, первый вход-выход которого подключен к четвертому входу-выходу контроллера, а второй вход-выход подключен к общей шине потенциалов, преобразователями автономного питания анодов, выход каждого из которых соединен с соответствующим анодом, а вход подключен к соответствующему входу-выходу общей шины управления токами преобразователей автономного питания анодов, и цифровыми датчиками потенциала корпуса корабля, вход каждого из которых подключен к выходу соответствующего электрода сравнения, а выход подключен к соответствующему входу-выходу общей шины потенциалов. Технический результат: повышение эффективности защиты корпуса корабля от коррозии за счет повышения точности установки и поддержания текущих значений защитных потенциалов на локальных участках поверхности в зависимости от их способности к поляризации электрическим током. 3 ил.
Система катодной защиты корпуса корабля от коррозии, содержащая электроды сравнения, аноды и контроллер, первый вход-выход которого соединен с входом-выходом блока управления и индикации, отличающаяся тем, что она снабжена модулем сопряжения с системой управления корабля, вход-выход которого подключен ко второму входу-выходу контроллера, модулем управления токами преобразователей, первый вход-выход которого подключен к третьему входу-выходу контроллера, а второй вход-выход подключен к общей шине управления токами преобразователей автономного питания анодов, модулем потенциалов, первый вход-выход которого подключен к четвертому входу-выходу контроллера, а второй вход-выход подключен к общей шине потенциалов, преобразователями автономного питания анодов, выход каждого из которых соединен с соответствующим анодом, а вход подключен к соответствующему входу-выходу общей шины управления токами преобразователей автономного питания анодов, и цифровыми датчиками потенциала корпуса корабля, вход каждого из которых подключен к выходу соответствующего электрода сравнения, а выход подключен к соответствующему входу-выходу общей шины потенциалов.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОТОКА НУЛЕВОЙ ПОСЛЕДОВАТЕЛЬНОСТИ | 0 |
|
SU201537A1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВЫХОДНОГО ТОКА СИСТЕМЫ КАТОДНОЙ ЗАЩИТЫ ОТ КОРРОЗИИ МЕТАЛЛОКОНСТРУКЦИЙ | 2015 |
|
RU2618968C1 |
| СИСТЕМА КАТОДНОЙ ЗАЩИТЫ ОТ КОРРОЗИИ МЕТАЛЛОКОНСТРУКЦИЙ | 2002 |
|
RU2215823C1 |
| CN 211256101 U, 14.08.2020. | |||

