Изобретение относится к сфере строительства и сбора конструкций, а именно к аппаратно-программному комплексу (АПК) для контроля процессов строительства и сбора конструкций с использованием BIM технологии, и может быть применено при строительстве и сборе зданий, мостов, кораблей, самолетов, мебели и других объектов.
Технология BIM (Building Information Model или Modeling – информационное моделирование зданий, сооружений) охватывает процессы проектирования, строительства и эксплуатации различных конструкций с использованием единой согласованной системы трехмерных моделей. Основным элементов BIM является информация, которая заложена в проекте, а также процесс обмена этой информацией между различными участниками.
Здесь и далее использование BIM технологии подразумевает наличие информационной модели конструкции и возможность работы с проектной трехмерной моделью конструкции.
Из уровня техники известен АПК для контроля процессов строительства и сбора конструкций с использованием BIM технологии (CN 110335341 A, 15.10.2019), содержащий удаленный сервер и по меньшей мере одно вычислительное устройство, связанное с модулем памяти, модулем обмена данными для связи с удаленным сервером, модулем визуализации и модулем интерфейса, причем удаленный сервер выполнен с возможностью хранения информационной модели конструкции, в которой записана информация о ее элементах. Вычислительное устройство выполнено с возможностью получения с удаленного сервера информационной модели посредством модуля обмена данными и сохранения в модуле памяти и выдачи команды модулю визуализации на отображение трехмерной модели конструкции и информации о ее элементах. При этом модуль интерфейса позволяет пользователю ввести метку дефекта конструкции, выявленного в ходе обследования, на соответствующем участке трехмерной модели. Вычислительное устройство сохраняет изменения в модуле памяти и посредством модуля обмена данными отправляет скорректированную трехмерную модель на удаленный сервер.
Таким образом осуществляется контроль процесса строительства. Данный способ не позволяет выявлять дефекты в автоматическом режиме.
Известен АПК для контроля процессов строительства и сбора конструкций с использованием BIM технологии (KR 101897434 B1, 10.09.2018), содержащий по меньшей мере одно вычислительное устройство, связанное с одной или несколькими видеокамерами для осуществления сканирования маркеров, модулем памяти, модулем обмена данными и модулем визуализации, причем вычислительное устройство выполнено с возможностью получения информационной модели посредством модуля обмена данными и сохранения в модуле памяти, распознавания маркеров, нанесенных в виде штрих-кодов или QR-кодов на элементах конструкции, при их сканировании посредством видеокамеры, осуществления выгрузки информации о соответствующих элементах, формирования двухмерной модели отсканированной части конструкции, выделения из информационной модели соответствующей двухмерной части конструкции и сравнения этих частей. После сравнения модуль визуализации отображает расхождения – так осуществляют контроль строительства.
Основные недостатки такого решения заключаются в невозможности удаленного мониторинга процессов строительства или сборки и малой информативности модели.
В качестве прототипа выбран АПК для контроля процессов строительства и сбора конструкций с использованием BIM технологии (US 10739590 B2, 11.08.2020), содержащий удаленный сервер и по меньшей мере одно вычислительное устройство, связанное с одной или несколькими видеокамерами для осуществления сканирования маркеров, модулем памяти, модулем обмена данными для связи с удаленным сервером и модулем визуализации, причем удаленный сервер выполнен с возможностью хранения информационной модели конструкции и данных, содержащих информацию об элементах конструкции и координаты мест на них для нанесения маркеров. Вычислительное устройство выполнено с возможностью получения с удаленного сервера информационной модели и данных посредством модуля обмена и сохранения их в модуле памяти, распознавания маркеров при выполнении сканирования после их нанесения на элементы конструкции в соответствии с отмеченными местами в информационной модели. Также вычислительное устройство при распознавании нанесенных на элементы конструкции маркеров осуществляет выгрузку информационной модели и данных для отображения модели посредством модуля визуализации в режиме дополненной реальности. Маркеры служат контрольными точками для определения положения оператора, при этом оператор может сопоставлять расположение маркеров в модели и с текущим в режиме реального времени.
Недостатки прототипа выражаются в отсутствии автоматизации процесса сравнения модели конструкции с текущим расположением ее элементов, отсутствии точности соотнесения маркеров при их сканировании, а также отсутствии возможности дистанционного контроля правильности сборки конструкции.
Задачей изобретения является создание интегрированного с BIM-технологией решения, позволяющего контролировать процессы строительства и сбора конструкций с момента производства до монтажа из любой точки мира, осуществлять сравнение положения элементов конструкции с проектным положение наглядно и в автоматическом режиме.
Технический результат заключается в сокращении сроков строительства и сбора конструкций за счет возможностей вычислительного устройства.
Указанный результат достигается АПК для контроля процессов строительства и сбора конструкций с использованием BIM технологии, содержащим удаленный сервер и по меньшей мере одно вычислительное устройство, связанное с одной или несколькими видеокамерами для осуществления сканирования маркеров, модулем памяти, модулем обмена данными для связи с удаленным сервером и модулем визуализации.
При этом удаленный сервер выполнен с возможностью хранения трехмерной информационной модели конструкции и данных, содержащих информацию об элементах конструкции, координаты проектных мест на них для нанесения маркеров и идентификационные коды элементов, позволяющие выявить информацию о них, а также с возможностью сохранения передаваемых данных.
Вычислительное устройство выполнено с возможностью получения с удаленного сервера информационной модели и данных посредством модуля обмена и их сохранения в модуле памяти, при осуществлении сканирования маркеров их распознавания и вычисления расстояний до распознанных маркеров, а также осуществления следующего:
– выгрузки информации об элементах конструкции и их идентификационных кодов после получения данных с удаленного сервера, связи идентификационных кодов элементов с распознанными маркерами до или после их нанесения на элементы в соответствии с координатами проектных мест, выдачи команды модулю визуализации на отображение выгруженной информации об элементах, идентификационные коды которых связываются с маркерами, сохранения данных о выполненной связи в модуле памяти и передачи их на удаленный сервер посредством модуля обмена;
– при сканировании маркеров и наличии данных об их связи с идентификационными кодами и данных с удаленного сервера осуществления выгрузки информации об элементах конструкции, на которых распознаны маркеры, с координатами проектных мест для них на элементах, определения взаимного положения между распознанными маркерами и сравнения со взаимным положением маркеров согласно координатам проектных мест, выдачи команды модулю визуализации на отображение выгруженной информации, результатов сравнения, а также расстояний до маркеров и/или расстояний между ними, сохранения данных о распознанных маркерах и расстояниях до них, а также о результатах сравнения в модуле памяти и передачи их удаленный сервер посредством модуля обмена данными.
В частном случае вычислительное устройство при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и данных с удаленного сервера может осуществлять выгрузку информации об элементах конструкции, на которых распознаны маркеры и создавать трехмерную модель, отражающую текущее расположение элементов конструкции с распознанными маркерами, выдавать команды модулю визуализации на отображение выгруженной информации об элементах и созданной трехмерной модели, сохранять ее в модуле памяти и передавать на удаленный сервер посредством модуля обмена данными.
Предпочтительно вычислительное устройство при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и данных с удаленного сервера может осуществлять выгрузку информации об элементах конструкции, на которых распознаны маркеры, выдавать команды модулю визуализации на отображение расстояний до маркеров и выгруженной информации, сохранять данные о распознавании одного или нескольких маркеров и о расстояниях до них в модуле памяти и передавать их удаленный сервер посредством модуля обмена данными.
Также вычислительное устройства при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и хранении трехмерной информационной модели конструкции в модуле памяти может выдавать команды модулю визуализации на отображение по меньшей мере части трехмерной модели конструкции, показывающей элементы, на которых распознаны маркеры.
Более конкретно, вычислительное устройство при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и хранении трехмерной информационной модели конструкции в модуле памяти может выдавать команды модулю визуализации на отображение по меньшей мере части трехмерной модели конструкции, показывающей элементы, на которых распознаны маркеры, в режиме дополненной реальности.
Дополнительно АПК включает GPS модуль, связанный с вычислительным устройством, которое выполнено с возможностью при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами вычисления расстояний до распознанных маркеров с присвоением им GPS координат, сохранения соответствующих данных в модуле памяти и передачи их удаленный сервер посредством модуля обмена данными.
В случае хранения в модуле памяти результатов распознавания маркеров с вычислением расстояний до них после первого сканирования вычислительное устройство может иметь возможность выдачи команды модулю визуализации при повторном сканировании маркеров и распознавании части из них на отображение расстояний до мест расположения нераспознанных или скрытых маркеров.
По меньшей мере одна видеокамера может быть выполнена в смартфоне, планшетном компьютере, ноутбуке, системе наблюдения, очках виртуальной реальности, очках дополненной реальности, на каске рабочего и/или на квадрокоптере.
Использование данных, содержащих информацию об элементах конструкции с координатами проектных мест на них для нанесения маркеров, позволяет знать проектные расстояния и угловые положения между нанесенными на эти места маркерами и элементами в сборе соответственно, а возможность при распознавании маркеров вычисления расстояний до них и, соответственно, до элементов конструкции позволяет с допустимой погрешностью сравнивать проектное положение элементов, обозначенное в информационной модели, с действительным расположением. Отображение информации о соответствии или отклонении, а также запись и передача такой информации на удаленный сервер для дистанционного контроля позволяет существенно уменьшить время на поиски и устранения нарушений, что сокращает сроки строительства и сбора конструкций.
Настоящее изобретение поясняется с помощью фиг.1-5.
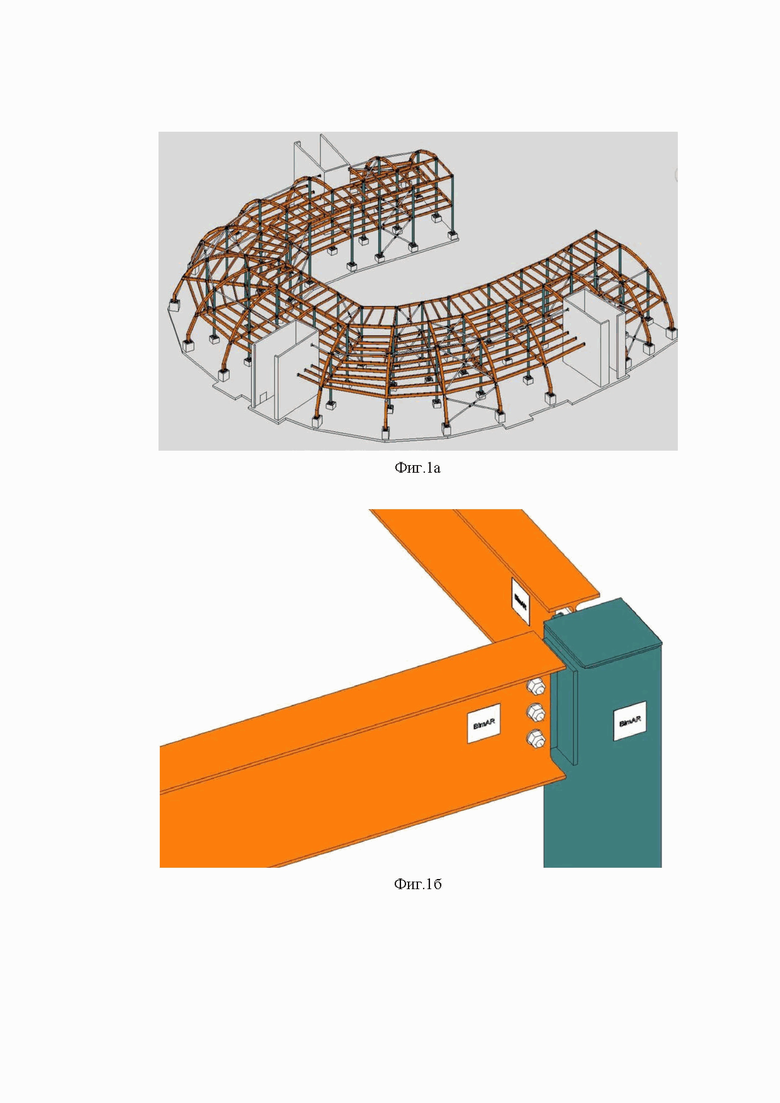
На фиг.1а-1б дан пример изображения трехмерной информационной модели конструкции с отмеченными местами для нанесения маркеров в соответствии с данными.
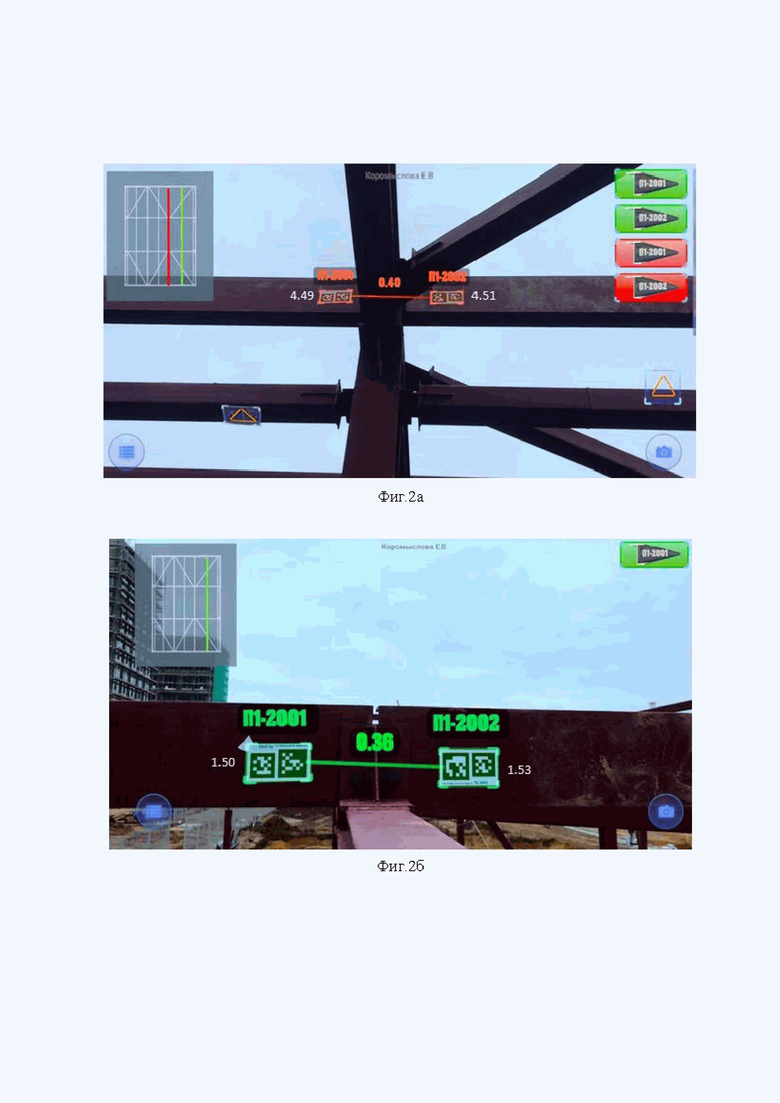
На фиг.2а-2б изображены примеры отображения модулем визуализации при сканировании маркеров информации об элементах, на которых распознаны маркеры, и результатов сравнения текущего взаимного положения маркеров со взаимным положением согласно координатам проектных мест, а также по отображению расстояний до маркеров и между ними.
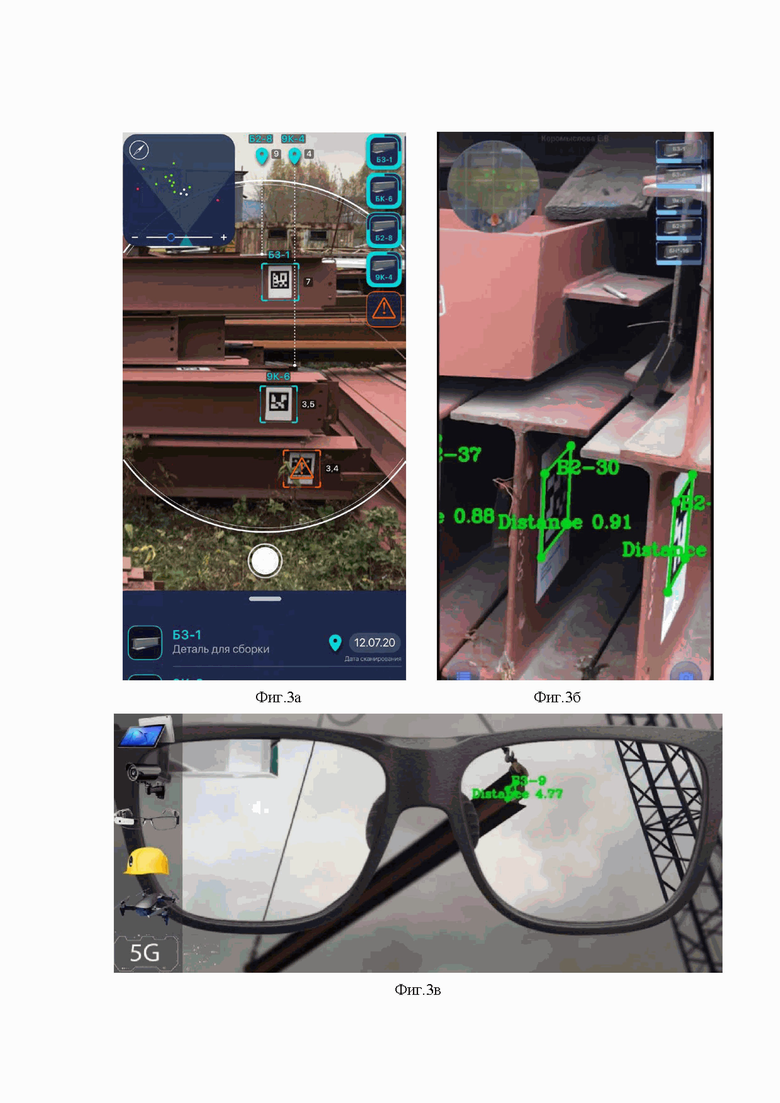
На фиг.3а-3в изображены примеры, как при сканировании маркеров модуль визуализации может отображать расстояния до них, информацию об элементах, на которых распознаны маркеры, и места расположения нераспознанных или скрытых маркеров при повторном сканировании.
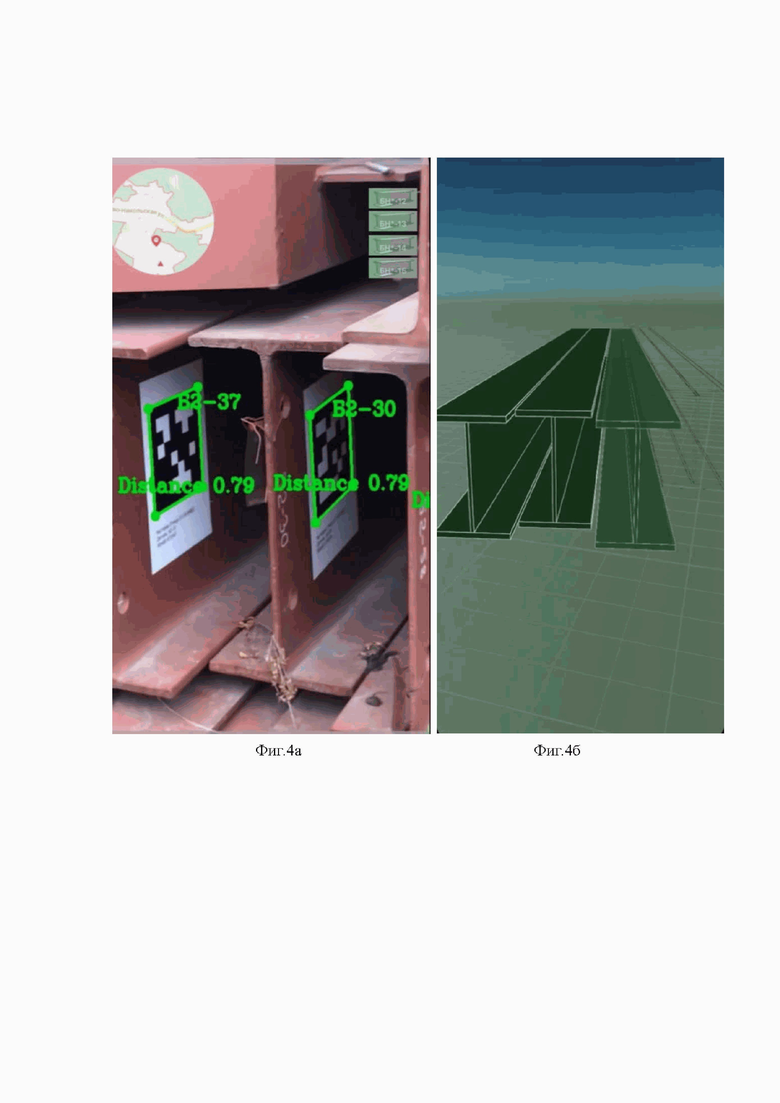
На фиг.4а-4б показан пример возможности вычислительного устройства при сканировании маркеров по созданию трехмерной модели, показывающей расположение элементов конструкции относительно друг друга.
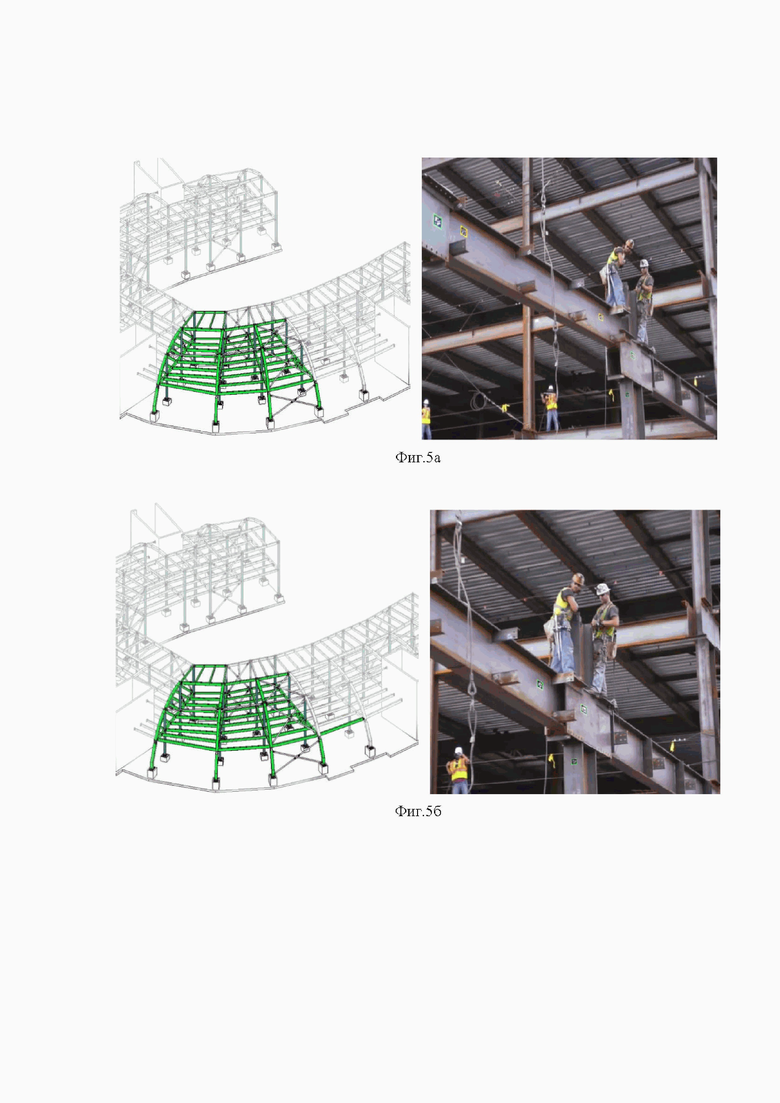
На фиг.5а-5б даны фотографии, на которых показаны примеры отображения модулем визуализации при сканировании маркеров по меньшей мере части трехмерной модели конструкции, показывающей элементы, на которых распознаны маркеры.
АПК по настоящему изобретению может быть применен для зданий, мостов, кораблей, самолетов, мебели и других конструкций различных размеров и предназначений.
Предлагаемый АПК для контроля процессов строительства и сбора конструкций с использованием BIM технологии включает в себя удаленный сервер и по меньшей мере одно вычислительное устройство, связанное с одной или несколькими видеокамерами для осуществления сканирования маркеров, модулем памяти, модулем обмена данными для связи с удаленным сервером и модулем визуализации. Принцип работы АПК и методы его реализации очевидны для специалиста в данной области техники, что подтверждает описанию ниже.
Видеокамера, модуль памяти, модуль обмена данными и модуль визуализации могут быть совмещены с вычислительным устройством, которое, как правило, представляет собой смартфон, ноутбук или планшетный компьютер. Возможна связка из двух или более устройств, например, ноутбук и внешняя камера, такая как IP камера, либо камера, установленная на каске рабочего или квадрокоптере.
Соответственно видеокамера может быть установлен в смартфоне, планшетном компьютере, ноутбуке, системе наблюдения, очках виртуальной реальности, очках дополненной реальности, на каске рабочего или на квадрокоптере. Вычислительное устройство обязательно содержит процессор, исполняющий код программы. Модуль памяти – это встроенный в вычислительное устройство или внешний накопитель данных, модуль обмена данными – это также встроенный в устройство или внешний модем, осуществляющий преимущественно беспроводную связь с удаленным сервером, а модуль визуализации – это как правило встроенный в вычислительное устройство дисплей, который выполнен с отдельным устройством для ввода, таким как клавиатура, или с технологией «touch screen».
Удаленный сервер предназначен для хранения трехмерной информационной модели конструкции и связанных с ней данных, сохранения новых передаваемых данных, а также предоставления к ним доступа пользователям. Первоначально на сервере записывают трехмерную информационную модель (фиг.1а), например, в формате fbx, и связанные данные, например, в формате json, содержащие информацию об элементах конструкции, координаты проектных мест на них для нанесения маркеров, причем координаты могут быть просмотрены на модели (фиг.1б) и идентификационные коды элементов, позволяющие выявить информацию об элементах.
Информация об элементах, например, строительных балках, содержит их наименования и может дополнительно содержать по меньшей мере одно из следующего: информацию о типах элементов, размерах элементов, их весе, наименования соседних элементов, в соединении с которыми находится текущий элемент, их размер, вес и другое, что может быть внесено на этапе проектирования трехмерной модели с помощью BIM технологии. С данными о координатах проектных мест на элементах для нанесения маркеров связана информация о размерах будущих маркеров, которая используется для повышения точности измерения расстояний до них, тем не менее, измерение расстояний возможно и без информации о размерах.
Маркеры могут быть нанесены на любом этапе, например, производства элементов, их складирования, транспортирования или сборки/строительства. В качестве маркеров преимущественно используются графические изображения, как правило, черно-белые простой формы в виде прямоугольника или квадрата с вписанным вовнутрь идентификатором-образом, однако возможно использование и других изображений. Из уровня техники известно применение аналогичных изображений в фидуциарных маркерах.
С помощью вычислительного устройства и модуля визуализации осуществляют действия с применением всех возможностей упомянутого устройства или только части из них, в зависимости от необходимости в конкретных возможностях на текущем этапе процесса строительства или сборки, например, этапами могут быть складирование, транспортирование, сборка или монтаж, при этом на каждом упомянутом этапе также могут применять различные возможности АПК, что будет очевидно из описания работы. Существенным является то, что АПК в принципе способен выполнять все заявленные в независимом пункте формулы действия. При этом конкретный пользователь может на данном этапе применять лишь часть возможностей, например, используемых при привязке маркеров к идентификационным кодам элементов, а другой пользователь в другой отрезок времени – сканировать нанесенные маркеры на соединенных элементах конструкции и выявлять расхождения с проектом (фиг.2а-2б).
Вычислительное устройство выполнено с возможностью получения, то есть скачивания/загрузки, с удаленного сервера информационной модели и упомянутых данных посредством модуля обмена данными и сохранения их в модуле памяти. Любая приема-передача данных посредством модуля обмена происходит при наличии связи с удаленным сервером.
Также вычислительное устройство способно при сканировании маркеров посредством видеокамеры осуществлять их распознавание и вычисление расстояний до распознанных маркеров, в том числе определения их углов, что позволяет правильно выявить положение элементов конструкции. Под сканированием понимаются процессы наведения видеокамеры на маркер и обработки видеопотока в режиме реального времени. При распознавании маркеров и вычислении расстояний до них используются известные в уровне техники алгоритмы, часто применяемые при реализации дополненной реальности.
Расчет расстояний до маркеров и определение взаимного положения между ними идет за счет использования характеристик матрицы видеокамеры. Используются данные о фокусном расстоянии и расположении на кадре точки, свидетельствующей о смешении оси глубины кадра. В вычислениях для повышения точности используются данные о размерах маркеров и известные размеры маркера на кадре в пикселях. По вышеперечисленным методикам, которые являются входными данными, путем вычисления радиусного расстояния от видеокамеры до центра маркера и вычисления расстояний по оси X и Y в плоскости кадра от центра кадра до центра маркера составляются трехмерные координаты центра маркера относительно видеокамеры, которые используются для вычисления расстояния между маркерами.
АПК применяют при нанесении маркеров на элементы конструкции, до или после непосредственного прикрепления какого-либо маркера к элементу. Для этого вычислительное устройство выполнено с возможностью после получения данных с удаленного сервера выгрузки информации об элементах конструкции и их идентификационных кодов, что означает определение этих данных в загруженном одном или нескольких файлах и предоставление к ним доступа пользователю; затем связи идентификационных кодов элементов с распознанными маркерами до или после их нанесения на элементы в соответствии с координатами мест и выдачи команды модулю визуализации на отображение выгруженной информации об элементах, идентификационные коды которых связываются с маркерами, что реализуется путем предоставления пользователю возможности поиска и выбора элемента из каталога, например, по наименованию, что входит в понятие информации об элементах, и предоставления возможности пользователю привязать выбранный элемент с распознанным маркером, который уже прикреплен, либо будет прикреплен; после чего вычислительное устройство сохраняет данные о выполненной связи в модуле памяти и передает их на удаленный сервер посредством модуля обмена.
Для повышения точности нанесения маркеров на элементы могут использоваться клейкие трафареты, на которых напечатаны маркеры, с размерами, соответствующими размерам элементов. К примеру, маркер должен быть нанесен на расстоянии 0,3 м от края строительной балки. Для этого изготавливается трафарет с маркером, центр которого находится на расстоянии 0,3 м от края трафарета. Высота трафарета при этом также соответствует высоте балки. Возможен иной вариант повышения точности нанесения маркеров.
После того, как маркеры будут нанесены, АПК может использоваться с целью непосредственно контроля процессов строительства или сбора конструкций. На данном этапе удаленный сервер дополнительно содержит данные об осуществленной привязке маркеров к идентификационным кодам элементов.
Предварительно загрузив посредством модуля обмена с удаленного сервера данные, содержащие информацию об элементах конструкции, данные о выполненной связи маркеров с идентификационными кодами и координаты проектных мест на элементах для маркеров, осуществляют сканирование маркеров с распознаванием и вычислением расстояний до них. Вычислительное устройство осуществляет выгрузку из хранящихся в модуле памяти данных информации об элементах конструкции, на которых распознаны маркеры, определяет взаимное положение между распознанными маркерами за счет вычисления расстояния до них и сравнивает со взаимным положением маркеров согласно координатам проектных мест на элементах.
После чего вычислительное устройство выдает команды модулю визуализации на отображение выгруженной информации об элементах, например, их наименований, результатов сравнения, например, цветом, где красный или желтый – нет соответствия, зеленый – соответствует проектному положению (фиг.2а-2б), а также на отображение расстояний до маркеров (фиг.2а-2б – расстояние показано белыми цифрами в метрах рядом с маркерами) и/или расстояний между ними (фиг.2а-2б – расстояние показано между маркерами). В зависимости от реализации АПК, цвет показаний, стиль и шрифт могут меняться, также могут отображаться только расстояния до маркеров, только расстояния между маркерами, либо и те и другие расстояния. Затем устройство сохранения данные о распознанных маркерах и вычисленных расстояниях до них, а также о результатах сравнения в модуле памяти и передачи их удаленный сервер посредством модуля обмена данными. Эти данные используются для контроля процессов строительства и сбора конструкций удаленным пользователем.
Очевидно, что перечисленные основные возможности АПК позволяют сократить сроки строительства/сборки конструкций за счет реализованного принципа моментального контроля соответствия собираемой конструкции проекту с выводом результатов проверяющему и удаленному пользователю.
Вычислительное устройство опционально может быть способно осуществлять дополнительные действия, перечисленные ниже. Они расширяют функционал АПК, но не являются обязательными для достижения технического результата.
При сканировании одного или нескольких маркеров на элементах конструкции и наличии предварительно загруженных данных, содержащих информацию об элементах, данные о связи маркеров с идентификационными кодами и координаты проектных мест на элементах для маркеров, устройство способно выполнять выгрузку информации об элементах, на которых распознаны маркеры и создания трехмерной модели, отражающей текущее расположение элементов конструкции, на которых распознаны маркеры, по вычисленным расстояниям до них, выдачу команды модулю визуализации на отображение выгруженной информации об элементах и созданной трехмерной модели (фиг.4а-4б), ее сохранение в модуле памяти и передачу на удаленный сервер посредством модуля обмена данными. Данный режим преимущественно используется для мониторинга элементов конструкции во время складирования и/или транспортировки.
При сканировании одного или нескольких маркеров и наличии предварительно загруженных данных, содержащих информацию об элементах, данные о связи маркеров с идентификационными кодами и координаты проектных мест на элементах для маркеров, вычислительное устройство может выполнять выгрузку информации об элементах конструкции, на которых распознаны маркеры с вычислением расстояний до них, выдачу команды модулю визуализации на отображение расстояний до маркеров и выгруженной информации (фиг.3б, 3в), сохранения данных о распознавании одного или нескольких маркеров и о расстояниях до них в модуле памяти и передачи их на удаленный сервер посредством модуля обмена данными. Данный режим преимущественно используется для мониторинга элементов конструкции во время складирования и/или транспортировки, просмотра информации об элементах, которая помимо их наименований может содержать данные о весе, габаритах, наименования соседних элементов, в соединении с которыми находится текущий элемент, их размер и вес, что поможет складировать, например, строительные балки, которые будут в соединении, рядом, определять максимальную загрузку транспортного средства по информации о весе и многое другое.
При сканировании одного или нескольких маркеров и наличии предварительно загруженных трехмерной информационной модели конструкции и данных, содержащих помимо прочего данные о связи маркеров с идентификационными кодами, вычислительное устройство может выполнять выгрузку трехмерной модели и выдачу команды модулю визуализации на отображение по меньшей мере части трехмерной модели, показывающей элементы, на которых распознаны один или несколько маркеров (фиг. 1а, 5а, 5б). Данный режим может использоваться для просмотра модели с целью определения соседних элементов, их проектного расположения и другого. Кроме того, визуализация в данном режиме может быть выполнена в дополненной реальности, то есть пользователь, например, в соответствующих очках осуществляет сканирование маркеров и в это же время видит проектную трехмерную модель конструкции, наложенную на реально расположенные элементы. Данный режим удобен на этапе монтаже конструкции.
В АПК может быть включен GPS модуль, связанный с вычислительным устройством, которое дополнительно выполнено с возможностью при сканировании одного или нескольких маркеров и наличии предварительно загруженных данных, содержащих помимо прочего данные о связи маркеров с идентификационными кодами, вычисления расстояний до распознанных маркеров с присвоением им GPS координат, сохранения соответствующих данных в модуле памяти и передачи их на удаленный сервер посредством модуля обмена данными. GPS координаты присваиваются маркерам с поправкой на расстояние до них от устройства с GPS модулем. Данный режим может использоваться для мониторинга элементов конструкции во время складирования и/или транспортировки, проверяется их территориальное положение. Предпочтительно комбинировать с другими режимами, в частности, с режимом, в котором вычисляются и отображаются расстояния до распознанных маркеров.
А в случае хранения в модуле памяти результатов распознавания маркеров с вычислением расстояний до них после первого сканирования устройство может выполнять выдачу команды модулю визуализации при повторном сканировании маркеров и распознавании части из них на отображение расстояний до мест расположения нераспознанных или скрытых маркеров (фиг.3а – голубые указатели местоположения в верхней части). Такая возможность ускорит поиск необходимых элементов.
Предлагаемый АПК работает следующим образом.
С использованием BIM технологии разрабатывается трехмерная информационная модель конструкции, например, каркас здания. Каждому элементу, например, каждой строительной балке, присваивается идентификационный код, по которому можно выявить информацию о соответствующем элементе – наименование и в некоторых случаях может быть по меньшей мере одно из следующего: тип, размер, вес, наименования соседних элементов, в соединении с которыми находится текущий элемент, их размер, вес. Информационную модель и данные, содержащие упомянутую информацию, идентификационные коды и координаты мест для маркеров, сохраняют на удаленном сервере.
К примеру, на этапе производства элементов конструкции на каждую балку наносят путем приклеивания или иным способом графический маркер в соответствии с проектными координатами, которые предварительно загружены в составе данных вычислительным устройством и просматривается пользователем. Для повышения точности нанесения маркеров они могут быть произведены на трафарете, размеры которого при наложении на край элемента конструкции позволяют точно наклеить маркер. Нанесение маркеров может происходить и на этапе монтажа/сборки конструкции.
До или после нанесения маркеров выполняют их распознавание путем сканирования и привязку каждого маркера к соответствующему идентификационному коду элемента. Привязка выполняется путем выбора элемента по отображаемой информации модулем визуализации об элементах конструкции, например, путем поиска по наименованию балки. Данные о привязке сохраняются и направляются на удаленный сервер при наличии связи.
Далее на этапе монтажа конструкции рабочий выполняет распознавание маркеров путем сканирования, например, видеокамерой смартфона, из загруженных данных, содержащих сведения о привязке маркеров, автоматически выгружается информация о соответствующих элементах, на которых распознаны маркеры, высчитываются расстояния до маркеров в поле зрения видеокамеры, их угловые положения, определяется взаимное положение между ними, осуществляется сравнение с взаимным положением маркеров согласно координатам проектных мест и показывается на дисплее, например, смартфона, информация об элементах – наименование, например, «Б3-1» (фиг.2а-2б, 3а-3б, 4а), и результаты сравнения с положением маркеров в информационной модели, например, путем выделения зеленым цветом правильно установленных балок, а красным – неправильно (фиг.2а-2б), так как расстояние между маркерами не совпадает с расстоянием согласно проекту с учетом с допустимого отклонения. Также отображаются расстояния до маркеров и/или расстояния между ними в зависимости от реализации АПК.
Затем происходит сохранение данных о результатах распознавания маркеров и о результатах сравнения в модуле памяти и передача их удаленный сервер посредством модуля обмена данными.
Дополнительно рабочий может наблюдать процесс монтажа и при сканировании и распознавании маркеров просматривать по меньшей мере части трехмерной модели конструкции, показывающей элементы, на которых распознаны один или несколько маркеров, то есть проектной трехмерной модели (фиг.1а, 5а-5б). Для этого при распознавании маркера на элементе конструкции и отображении информации о нем пользователь отмечает данный элемент как якорный. После чего по меньшей мере часть проектной модели конструкции выводится на дисплее, например, смартфона. Также проектная модель может выводиться в режиме дополненной реальности в реальном времени.
Преимуществом предлагаемого решения является возможность проверяющего в любой момент обратиться к информационной модели и всем данным и результатам распознавания с вычислением расстояний, хранящимся на удаленном сервере, и увидеть, на каком этапе находится строительство или сбор конструкции, степень завершения, обнаруженные нарушения и отклонения от проекта в процессе монтажа, положение элементов, а при использовании возможности привязки к GPS координатам еще и территориальное расположение элементов конструкции на карте.
Таким образом, применение АПК по настоящему изобретению позволит распознавать ошибки сбора конструкций на ранней стадии и оперативно принимать решение о методе устранения в том числе за счет удаленного мониторинга, отслеживать процессы складирования и транспортировки, располагать элементы в зависимости от очередности сборки конструкции, минимизировать риски неправильного монтажа за счет вывода информации при распознавании маркеров в режиме реального времени, что существенно сокращает сроки строительства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ФОРМИРОВАНИЯ СРЕДЫ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ | 2015 |
|
RU2606874C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ СОВМЕЩЕННОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2660631C1 |
| СПОСОБ И СИСТЕМА РЕНДЕРИНГА 3D МОДЕЛЕЙ В БРАУЗЕРЕ С ИСПОЛЬЗОВАНИЕМ РАСПРЕДЕЛЕННЫХ РЕСУРСОВ | 2020 |
|
RU2736628C1 |
| Система контроля жизненного цикла объекта и его инфраструктуры (варианты) | 2019 |
|
RU2755146C2 |
| СПОСОБ И СИСТЕМА СБОРА ИНФОРМАЦИИ ДЛЯ УСТРОЙСТВА СОВМЕЩЕННОЙ РЕАЛЬНОСТИ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2019 |
|
RU2702495C1 |
| Система определения стоимости весового товара | 2021 |
|
RU2809136C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОЕКТАМИ ДЛЯ ОБЕСПЕЧЕНИЯ ОПТИМАЛЬНОГО ВЗАИМОДЕЙСТВИЯ С ЦИФРОВЫМИ МОДЕЛЯМИ | 2014 |
|
RU2644506C2 |
| СПОСОБ ОТСЛЕЖИВАНИЯ, ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ИНТЕРЕСУЮЩИХ ОБЪЕКТОВ И АВТОНОМНОЕ УСТРОЙСТВО C ЗАЩИТОЙ ОТ КОПИРОВАНИЯ И ВЗЛОМА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2789609C1 |
| Система прогностического технического обслуживания с использованием технологии дополненной реальности | 2023 |
|
RU2820787C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ (МОНИТОРИНГ СОСТОЯНИЯ) И АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2003 |
|
RU2260851C2 |
Изобретение относится к сфере строительства и сбора конструкций. Технический результат заключается в сокращении сроков строительства. Комплекс для контроля процессов строительства и сбора конструкций с использованием BIM технологии, при котором осуществляется выгрузка информации об элементах конструкции и их идентификационных кодов, связи идентификационных кодов элементов с распознанными маркерами до или после их нанесения на элементы в соответствии с координатами проектных мест, выдача команды модулю визуализации на отображение выгруженной информации об элементах, при сканировании маркеров осуществляется выгрузка информации об элементах конструкции, на которых распознаны маркеры, с координатами проектных мест для них на элементах, определение взаимного положения между распознанными маркерами и сравнение с взаимным положением маркеров согласно координатам проектных мест, выдача команды модулю визуализации на отображение выгруженной информации, результатов сравнения, а также расстояний до маркеров и/или расстояний между ними, сохранение данных о распознанных маркерах и расстояниях до них, а также о результатах сравнения в модуле памяти и передача их удаленным сервером посредством модуля обмена данными. 7 з.п. ф-лы, 11 ил.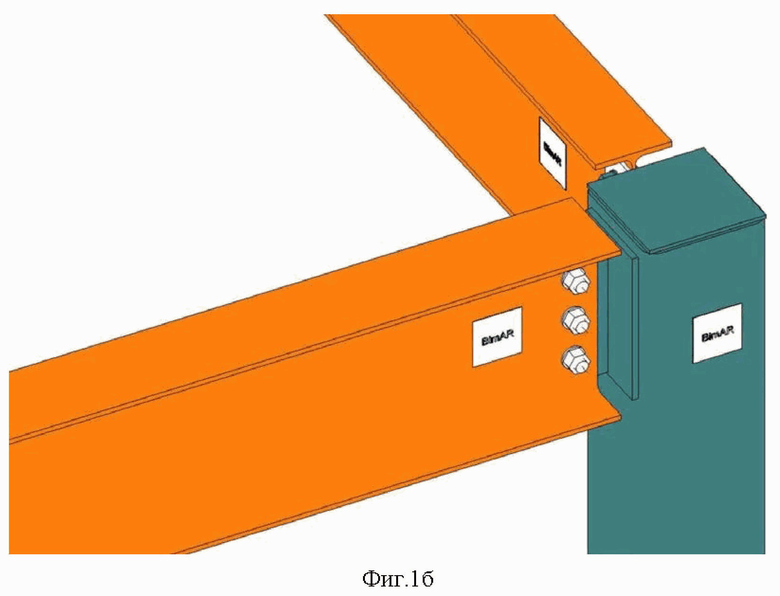
1. Аппаратно-программный комплекс для контроля процессов строительства и сбора конструкций с использованием BIM технологии, содержащий удаленный сервер и по меньшей мере одно вычислительное устройство, связанное с одной или несколькими видеокамерами для осуществления сканирования маркеров, модулем памяти, модулем обмена данными для связи с удаленным сервером и модулем визуализации, причем
удаленный сервер выполнен с возможностью хранения трехмерной информационной модели конструкции и данных, содержащих информацию об элементах конструкции, координаты проектных мест на них для нанесения маркеров и идентификационные коды элементов, позволяющие выявить информацию о них, а также с возможностью сохранения передаваемых данных,
вычислительное устройство выполнено с возможностью получения с удаленного сервера информационной модели и данных посредством модуля обмена и их сохранения в модуле памяти, при осуществлении сканирования маркеров их распознавания и вычисления расстояний до распознанных маркеров, а также осуществления следующего:
выгрузки информации об элементах конструкции и их идентификационных кодов после получения данных с удаленного сервера, связи идентификационных кодов элементов с распознанными маркерами до или после их нанесения на элементы в соответствии с координатами проектных мест, выдачи команды модулю визуализации на отображение выгруженной информации об элементах, идентификационные коды которых связываются с маркерами, сохранения данных о выполненной связи в модуле памяти и передачи их на удаленный сервер посредством модуля обмена,
при сканировании маркеров и наличии данных об их связи с идентификационными кодами и данных с удаленного сервера осуществления выгрузки информации об элементах конструкции, на которых распознаны маркеры, с координатами проектных мест для них на элементах, определения взаимного положения между распознанными маркерами и сравнения с взаимным положением маркеров согласно координатам проектных мест, выдачи команды модулю визуализации на отображение выгруженной информации, результатов сравнения, а также расстояний до маркеров и/или расстояний между ними, сохранения данных о распознанных маркерах и расстояниях до них, а также о результатах сравнения в модуле памяти и передачи их удаленный сервер посредством модуля обмена данными.
2. Аппаратно-программный комплекс по п.1, дополнительно включающий возможность вычислительного устройства при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и данных с удаленного сервера осуществления выгрузки информации об элементах конструкции, на которых распознаны маркеры, и создания трехмерной модели, отражающей текущее расположение элементов конструкции с распознанными маркерами, выдачи команды модулю визуализации на отображение выгруженной информации об элементах и созданной трехмерной модели, ее сохранения в модуле памяти и передачи на удаленный сервер посредством модуля обмена данными.
3. Аппаратно-программный комплекс по п.1, дополнительно включающий возможность вычислительного устройства при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и данных с удаленного сервера осуществления выгрузки информации об элементах конструкции, на которых распознаны маркеры, выдачи команды модулю визуализации на отображение расстояний до маркеров и выгруженной информации, сохранения данных о распознавании одного или нескольких маркеров и о расстояниях до них в модуле памяти и передачи их на удаленный сервер посредством модуля обмена данными.
4. Аппаратно-программный комплекс по п.1, дополнительно включающий возможность вычислительного устройства при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и хранении трехмерной информационной модели конструкции в модуле памяти выдачи команды модулю визуализации на отображение по меньшей мере части трехмерной модели конструкции, показывающей элементы, на которых распознаны один или несколько маркеров.
5. Аппаратно-программный комплекс по п.1, дополнительно включающий возможность вычислительного устройства при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами и хранении трехмерной информационной модели конструкции в модуле памяти выдачи команды модулю визуализации на отображение по меньшей мере части трехмерной модели конструкции, показывающей элементы, на которых распознаны маркеры, в режиме дополненной реальности.
6. Аппаратно-программный комплекс по п.1, включающий GPS модуль, связанный с вычислительным устройством, которое дополнительно выполнено с возможностью при сканировании одного или нескольких маркеров и наличии данных об их связи с идентификационными кодами вычисления расстояний до распознанных маркеров с присвоением им GPS координат, сохранения соответствующих данных в модуле памяти и передачи их на удаленный сервер посредством модуля обмена данными.
7. Аппаратно-программный комплекс по п.3, дополнительно включающий возможность вычислительного устройства в случае хранения в модуле памяти результатов распознавания маркеров с вычислением расстояний до них после первого сканирования выдачи команды модулю визуализации при повторном сканировании маркеров и распознавании части из них на отображение расстояний до мест расположения нераспознанных или скрытых маркеров.
8. Аппаратно-программный комплекс по п.1, включающий по меньшей мере одну видеокамеру, выполненную в смартфоне, планшетном компьютере, ноутбуке, системе наблюдения, очках виртуальной реальности, очках дополненной реальности, на каске рабочего и/или на квадрокоптере.
| СИСТЕМА УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМИ МАТЕРИАЛАМИ И СПОСОБ УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМИ МАТЕРИАЛАМИ | 2016 |
|
RU2709658C2 |
| US 10254540 B2, 09.04.2019 | |||
| CN 110335341 A, 15.10.2019 | |||
| KR 101897434 B1, 10.09.2018 | |||
| WO 2020097589 A1, 14.05.2020 | |||
| Способ BIM проектирования наземно-подземного объекта | 2018 |
|
RU2699257C1 |

