Область техники
Настоящее изобретение относится к формированию отчетов об измерениях в отличной от наземной системе связи, например в системе спутниковой связи.
Уровень техники
Системы спутниковой передачи данных или телефонной связи хорошо известны. Примером может служить система телефонной связи и передачи данных «Иридиум» (Iridium).
«Иридиум» использует спутники на низкой околоземной орбите, при этом на шести орбитах находится по 11 спутников. Спутники расположены на высоте 781 км, а их период обращения составляет приблизительно 100 минут, т.е. интервал между временем прохождения двумя соседними спутниками, находящимися на одной орбите, над одной и той же точкой на поверхности Земли составляет порядка девяти минут.
В настоящее время консорциум 3GPP формирует облик следующего поколения стандартов мобильной связи (5G). Они должны определять сетевую архитектуру для опорной сети (5GC) и для сети радиодоступа (NR, New Radio). Кроме того, к сети 5GC обеспечивается доступ из не-3GPP сетей доступа. Общие сведения о сетях NR и 5GC изложены в описаниях предыдущих изобретений.
В 2017 году в консорциуме 3GPP начались работы в новой сфере деятельности по включению в сетях NR средств поддержки отличных от наземных сетей доступа (NTN, Non-Terrestrial access Networks). В документе 3GPP RP-171450 было предложено новое исследование, в котором сети NTN определены как сети или сегменты сетей, использующие для передачи воздушные летательные аппараты или космические аппараты.
Космические аппараты - спутники, в том числе спутники на низкой околоземной орбите (LEO, Low Earth Orbit), спутники на средней околоземной орбите (MEO, Medium Earth Orbit), спутники на геостационарной околоземной орбите (GEO, Geostationary Earth Orbit), а также спутники на высокоэллиптической орбите (HEO, Highly Elliptical Orbit).
Воздушные летательные аппараты - высотные платформы (HAP, High Altitude Platforms), включая беспилотные воздушные системы (UAS, Unmanned Aircraft Systems), в том числе привязные беспилотные летательные аппараты (БПЛА), БПЛА легче воздуха (LTA, Lighter Than Air) и БПЛА тяжелее воздуха (HTA, Heavier Than Air). Все они обычно работают на высотах от 8 до 50 км в квазистационарном режиме.
Поставленная цель заключается во включении в сети NR средств поддержки сетей NTN. Таким образом, предполагается не предоставление доступа к сетям 5GC таким известным технологиям спутниковой связи, как «Иридиум», а необходимое усовершенствование разрабатываемого в настоящее время стандарта сетей NR, чтобы обеспечить возможность работы с описанными выше транспортными средствами, отличными от наземных.
Эта цель открывает широкий спектр возможностей для инноваций, необходимых для обеспечения эффективной связи между устройством пользователя (UE, User Equipment) и базовой станцией сети NTN или приемопередатчиком сети NTN.
Наиболее вероятной моделью реализации базовых станций или приемопередатчиков сетей NTN и сетей NR являются квазистационарные высотные псевдоспутники (HAPS, High Altitude Pseudo Satellites) и спутники LEO. Данное изобретение расширяет возможности включения спутников LEO, MEO и HEO в сети NR.
Модель реализации может заключаться в том, что спутники LEO управляются оператором спутниковой связи, обеспечивающим операторам мобильной связи (MNO, Mobile Network Operator) доступ к сетям NTN в режиме совместного доступа к радиосети, как это определено консорциумом 3GPP, начиная с сетей 3G. Общая сеть радиодоступа (RAN, Radio Access Network) сети NTN может дополнять наземную сеть RAN оператора MNO. Каждый спутник может участвовать в общей сети RAN в своей текущей зоне покрытия, при этом общая сеть RAN, используемая конкретным оператором MNO, располагает большим количеством спутников, динамически сменяющих друг друга по мере следования этих спутников по их орбитам.
В целом, с точки зрения архитектуры, для реализации сети NTN существуют две альтернативные возможности:
- спутник представляет собой базовую станцию со всеми интеллектуальными возможностями базовой станции (в этом варианте реализации базовая станция устанавливает связь с наземной станцией по спутниковому каналу, а наземная станция подключает спутник к соответствующей базовой сети);
- спутник просто является ретранслятором, перенаправляющим данные между устройством UE и наземной станцией, которая является фактической базовой станцией (такой вариант реализации часто называют архитектурой «bent pipe» («изогнутая труба»)).
В рамках данного изобретения используется модель со спутником, содержащим базовую станцию, если не указано иное. Это сделано лишь для облегчения понимания и не должно препятствовать обобщению. Идеи этого изобретения применимы также и для варианта реализации «bent pipe».
Из текущих мероприятий по стандартизации сетей NR известна гибкая параметризация для физического уровня, когда на одной несущей в одно и то же время могут использоваться несколько длин интервалов времени передачи (TTI, Transmission Time Interval) или разные значения разнесения поднесущих, теоретически, даже в одном устройстве UE.
В этом контексте в настоящее время в консорциуме 3GPP обсуждается идея формирования поддиапазонов. Поддиапазон может быть сформирован для данной несущей путем группирования элементов физических ресурсов, расположенных непрерывно во временной и/или частотной области. Поддиапазоны могут быть сформированы на основе различных принципов, например с точки зрения разнесения поднесущих, циклического префикса, ширины (в частотной области), длины (во временной области) и т.д. Кроме того, выделение физических ресурсов поддиапазонов физическим каналам (используемым для передачи данных, полученных с более высоких уровней или предназначенных для них) и физическим сигналам (информации, передаваемой или оцениваемой непосредственно на физическом уровне, например опорным сигналам для выполнения измерений) может отличаться для разных поддиапазонов. В будущем может быть реализовано несколько поддиапазонов для каждой несущей, отличающихся принципами формирования и/или выделением физических ресурсов, при этом устройства UE могут быть способными переключаться на другой поддиапазон или на несколько других поддиапазонов во время работы на данной несущей. Два или большее количество поддиапазонов могут даже перекрываться в некоторых сценариях во временной области и/или в частотной области.
Тем не менее, об автоматическом изменении параметров физического уровня и/или поддиапазонов на основе ожидаемых изменений в канале связи не известно и оно не предвидится.
Чтобы базовые станции в системах сотовой связи выбирали лучшую соту и лучшую базовую станцию для обслуживания устройства UE, а также выбирали соты и время для возможного хэндовера, объединения несущих и подключения к нескольким сотам, базовая станция предоставляет устройству UE измерительные конфигурации. Такая конфигурация включает в себя измеряемые значения, пороги для сравнения с измеренными значениями, детали отчетности об измерениях, например, триггеры формирования отчетов и параметры, значения которых должны быть включены в отчеты об измерениях.
Типичный пример измеряемых параметров - это уровень принимаемого сигнала (RSS, Received Signal Strength, например, значение принимаемой мощности опорного сигнала (RSRP, Reference Signal Received Power), определенное в системе LTE) обслуживающей соты, первичной и/или вторичной соты (в случае применения объединения несущих) и соседних сот. Этот уровень принимаемого сигнала является измеренным уровнем сигнала заранее известного опорного сигнала, обычно передаваемого базовой станцией без модуляции и последующего кодирования с постоянной или предварительно заданной мощностью передачи, позволяющий проводить значимые измерения на приемной стороне.
В случае системы LTE можно настроить три критерия формирования отчетов:
- формирование отчетов по событию;
- периодическое формирование отчетов;
- периодическое формирование отчетов по событию.
В системе LTE применяются следующие типичные триггеры формирования отчетов по событию на основе сравнения с порогом, сходные с применяемыми в большинстве стандартов сотовой связи:
- событие A1 (уровень сигнала обслуживающей соты выше порога);
- событие A2 (уровень сигнала обслуживающей соты ниже порога);
- событие A4 (уровень сигнала соседней соты выше порога);
- событие A5 (уровень сигнала соты PCell/PSCell ниже порога 1, а уровень сигнала соседней соты выше порога 2);
- событие B1 (уровень сигнала соседней соты с другой технологией радиодоступа выше порога);
- событие B2 (уровень сигнала соты PCell ниже порога 1, а уровень сигнала соседней соты с другой технологией радиодоступа выше порога 2);
- событие C1 (уровень ресурса CSI-RS выше порога).
В системе LTE применяются следующие типичные триггеры формирования отчетов на основе сравнения результатов двух или более измерений:
- событие A3 (смещение соседней соты больше смещения соты PCell/PSCell);
- событие A6 (смещение соседней соты больше смещения соты SCell);
- событие C2 (смещение ресурса CSI-RS больше смещения опорного ресурса CSI-RS).
Кроме того, система LTE позволяет настраивать периодическое формирование отчетов с результатами измерений. Эти возможности могут использоваться, например, в контексте функции ANR (Automatic Neighbour Relation - автоматическое взаимодействие с соседними сотами), чтобы дать устройству UE возможность регулярно сообщать идентификаторы соседних сот с самым сильным сигналом.
Из вышеизложенного ясно, что в соответствии с известными техническими решениями сравнение результата измерения выполняется либо с постоянным порогом, либо с другими результатами измерения.
Можно привести следующий пример использования событий A1, A2 и A4 и/или B1: базовая станция конфигурирует устройство UE на измерительное событие A2 и на отсутствие событий A1, A4 и B1. Пока качество принимаемого сигнала от обслуживающей базовой станции достаточно высокое, отчеты об измерениях не отправляются.
Когда выполняется критерий A2, устройство UE отправляет базовой станции отчет об измерениях, при этом базовая станция может переконфигурировать устройство UE в отношении измерений по событиям A4 и B1 в соседних сотах с учетом промежутков для измерений, которые могут потребоваться устройству UE при выполнении измерений в соседних сотах, требующих радиоресурсов и, следовательно, снижающих эффективность. Кроме того, базовая станция может конфигурировать событие A1 для обнаружения возобновления нормальной работы обслуживающей базовой станции, а когда по событию A1 формируется отчет, отменять проверку событий A4 и B1, освобождая промежуток для измерений и, таким образом, повышать эффективность до прежнего уровня.
В режиме ожидания устройство UE автономно выбирает соту для кемпинга, т.е. соту, в которой устройство UE прослушивает вызывные сообщения и из которой устройство UE при необходимости запрашивает установку соединения. Обычно конфигурация устройства UE содержит список сот, для которых оно должно выполнять измерения (список соседних сот), и в то же время устройство UE может автономно искать и обнаруживать другие возможные соты на основе сохраненной информации с учетом реализации устройства UE. Обычно устройство UE выполняет измерения в соседних сотах, как только уровень RSS обслуживающей соты падает ниже порогового значения.
В документе US 20110195708A1 описана конфигурация измерений, содержащая инструкции по проведению измерений, требующие, чтобы устройство UE выполняло измерение уровня RSS соседних сот или отправляло отчеты об измерениях в зависимости от состояния соседней соты. Таким образом, формирование отчета об измерениях зависит не только от самого измеренного значения (как в известных традиционных системах сотовой связи), но и от дополнительной информации, полученной при уже примененной конфигурации измерений. В этом документе не описываются ни измерительные конфигурации, зависящие от времени или относительного положения спутника, ни применение переменных (т.е. изменяющихся во времени) порогов или значений смещения в качестве триггеров формирования отчетов об измерениях.
В документе WO 2013115696A1 описан способ выполнения измерений для соты, в котором используются пороговые значения для обслуживающей соты и соседней соты, при этом определение пороговых значений основано на нагрузке контролируемых сот. При изменении положения устройства UE уровень сигнала изменяется со временем, но прогнозирование значения уровня сигнала по известной изменяющейся во времени функции не применяется.
В документе WO 2017189862 описана процедура хэндовера в системе спутниковой связи. Пользовательский терминал может запрашивать информацию о хэндовере из наземной сети, в том числе о времени хэндовера к конкретному спутнику.
Для спутниковых подключений к сети 5GC в структуре сети NR потери при распространении и, следовательно, улучшение и ухудшение качества канала связи между устройством UE и спутником при прохождении спутника по орбите над устройством UE происходит в соответствии с заранее известными закономерностями. При малых углах наблюдения спутника устройством UE над горизонтом качество канала связи может снижаться из-за большого расстояния между устройством UE и спутником, означающего длинный путь распространения сигнала через тропосферу с повышенным затуханием. При бо́льших углах это расстояние короче и затухание меньше, поэтому качество канала связи повышается.
Во время прохода спутника, обслуживающего наземное устройство UE, указанные выше изменения качества канала связи известны или заранее определены, т.е. нет причин измерять эти эффекты и формировать отчеты об измерениях. Кроме того, эти изменения являются периодическими, поскольку обычно устройство UE, имеющее соединение через спутники LEO, последовательно обслуживается несколькими спутниками, проходящими над устройством UE по одной и той же или близкой относительной орбите. Орбиты этих спутников могут быть близкими, но не строго одинаковыми, из-за того, что ось их обращения немного наклонена относительно полярной оси, но этот эффект весьма незначителен и поэтому здесь не учитывается.
Применение адаптации конфигурации измерений, характеристик измерений и формирования отчетности об измерениях к заранее известным долгосрочным изменениям канала связи не известно. Также не известны эффективные механизмы выполнения измерений и формирования отчетов для заранее известных периодических изменений в каналах связи.
Цель настоящего изобретения состоит в реализации режима измерений для устройств UE сотовой связи, оптимизированного для измерений в отношении спутниковых базовых станций или спутниковых приемопередающих станций, соединяющих устройства UE с наземными базовыми станциями.
В дальнейшем термин «наземное устройство UE» обозначает устройство UE, которое находится на земной поверхности и является стационарным или которое находится рядом с земной поверхностью и является квазистационарным по отношению к расстоянию от него до спутника и с учетом скорости спутника. Иными словами, самолет при обычной высоте полета порядка 10 км и скорости полета до 1000 км/ч считается наземным устройством UE.
В настоящем изобретении реализован способ работы устройства UE, подключенного к отличной от наземной системе связи, содержащей множество точек передачи, в котором устройство UE инициирует передачу отчета об измерениях в зависимости от выполненного устройством UE измерения параметра сигнала, принятого из точки передачи системы, и сравнения измеренного параметра с порогом, значение которого изменяется в соответствии с заранее заданной функцией в зависимости от ожидаемого положения устройства UE относительно точки передачи.
Несмотря на то что в предпочтительном примере осуществления изобретения упоминается спутниковая система связи, изобретение этим не ограничивается, если не указано иное. Точка передачи сети может представлять собой спутник или приемопередатчик летательного аппарата.
Одним из аспектов изобретения является отчетность об измерениях, предусматривающая формирование отчетов об измерениях, отправляемых устройством UE, на основе переменных порогов, которые определяются или настраиваются на известное или заранее заданное изменение, соответствующее траектории спутника, проходящего над устройством UE.
В этом аспекте предусмотрена настройка отчетности об измерениях в устройстве UE базовой станцией, определяющей характеристики заранее известных изменений канала связи между устройством UE и спутником. Эти характеристики передаются устройству UE в одном или нескольких сообщениях о конфигурации измерений как описание функции, как указатель одной из множества заранее известных возможных функций, как параметры для заранее известной функции или как любая их комбинация.
Описанная таким образом функция может применяться к пороговому значению перед сравнением с измеренным значением. В альтернативном варианте описанная таким образом функция может применяться к измеренному значению перед сравнением с заданным порогом.
Дополнительным аспектом изобретения является отчетность об измерениях, предусматривающая формирование отчетов об измерениях, отправляемых устройством UE, на основе сравнения нескольких измеренных значений сигналов разных спутников, при котором к измерениям разных спутников перед сравнением результирующих значений применяются разные характеристики. Это позволяет адаптировать результаты измерения сигналов различных спутников, например, перед сравнением нормировать их по отношению к соответствующей траектории относительно устройства UE.
Альтернативным или дополнительным вариантом этого аспекта является сравнение двух измеренных значений сигналов разных спутников с использованием смещения, например как в измерениях A3, A6 и C2, описанных выше. В этом варианте выполняется динамическая настройка смещения по заранее заданным характеристикам, настраиваемым как функция или параметры. Задание динамического смещения позволяет, например, адаптировать сравнение измерений для разных спутников, чтобы увеличить вероятность хэндовера к спутникам, для которых можно ожидать скорого повышения качества канала связи или которые находятся на предпочтительной орбите.
Другой аспект изобретения состоит в изменяющейся конфигурации физических сигналов для выполнения измерений (опорных) сигналов на основе заранее известных изменений канала связи между устройством UE и спутником (в частности, в контексте описанного выше понятия поддиапазонов).
Еще один аспект изобретения относится к определению применяемых порогов или параметров смещения как комбинации трех шагов: во-первых, общего конфигурирования измерений на основе участков траектории прохода базовой станции, т.е. конфигурирования, не зависящего от текущего положения спутника относительно устройства UE; во-вторых, определения положения конкретного спутника относительно устройства UE, т.е. на втором шаге определяется текущее положение спутника; в-третьих, применения в устройстве UE параметров измерения, определенных на основе общей конфигурации и текущего положения спутника.
Согласно этому аспекту, на первом шаге базовая станция может задавать характеристики заранее известного изменения линии связи в отношении заранее заданного участка, не обязательно соответствующего текущему состоянию канала связи между устройством UE и спутником во время конфигурирования. Проще говоря, базовая станция задает характеристики канала связи в разные моменты времени прохода спутника, причем эти разные моменты времени определяются относительно начального момента времени, который может соответствовать некоторому начальному угловому положению над горизонтом линии между устройством UE и спутником или другой подобной виртуальной начальной точке.
Второй шаг заключается в определении точки на траектории прохода спутника относительно устройства UE, в которой спутник находится в настоящее время. Иными словами, этот аспект определяет текущее положение спутника относительно устройства UE, связанное с состоянием канала связи между устройством UE и спутником.
Оценка для второго шага может быть выполнена с использованием внутренних измерений устройства UE, например изменения канала связи во времени, доплеровской частоты или ее изменения, угла приема или его изменения, сравнения результатов измерений для различных спутников и т.д. Эта оценка также может учитывать время, например, на основе известного начального момента времени для определения характеристик. Оценка также может быть рассчитана на основе географического положения устройства UE, например, по координатам GPS, и известной информации об орбитах и перемещениях спутников. Оценка также может учитывать информацию, транслируемую спутником, например его положение, текущее время или положение соседних спутников.
Оценка фактического положения спутника может выполняться устройством UE автономно или она может выполняться базовой станцией после предоставления характеристик вышеупомянутым общим способом, при этом базовая станция может определять текущее положение спутника на траектории его прохода относительно устройства UE и предоставлять эту информацию устройству UE.
Текущее положение используется на третьем шаге для определения параметров или функций, фактически применяемых для сравнения измеренного значения с порогом или для сравнения двух измеренных значений для разных спутников.
Другой аспект изобретения состоит в повторном применении сконфигурированных характеристик канала связи для измерений в повторяющиеся периоды прохода разных спутников практически по одной и той же траектории. Иными словами, конфигурация измерений продолжает действовать в течение нескольких периодов обращения спутников, обслуживающих устройство UE. Этот аспект можно с успехом комбинировать с первым аспектом определения характеристик общим способом. После хэндовера базовая станция, например целевая базовая станция на целевом спутнике, может просто сообщать свое расчетное текущее положение относительно устройства UE, чтобы устройство UE могло применять полученную ранее конфигурацию измерений с уточнением согласно траектории целевого спутника. В альтернативном варианте устройство UE может после хэндовера автономно оценивать текущее состояние канала связи между устройством UE и спутником и применять общую конфигурацию измерений, адаптированную к текущему относительному положению спутника.
Вышеуказанный аспект также можно комбинировать с множеством различных общих характеристик, конфигурируемых базовой станцией для устройства UE, например, с каждой общей характеристикой, относящейся к спутникам определенной орбиты. Учитывая, что устройство UE поочередно обслуживается спутниками, находящимися на двух разных соседних орбитах, можно настраивать общие характеристики для каждой орбиты. После хэндовера целевая базовая станция может сообщать свое расчетное текущее положение относительно устройства UE, включая указание о том, какие из сконфигурированных характеристик должны применяться устройством UE, т.е. на какой орбите находится спутник. В еще одном альтернативном варианте оценка текущего положения и, возможно, орбиты, на которой находится спутник, может выполняться устройством UE автономно для определения применяемых характеристик измерения.
Дополнительным аспектом этого изобретения является отложенная конфигурация измерений, основанная на описанных выше изменяемых измерениях. В этом аспекте предусматривается, что базовая станция может конфигурировать первые измерения и первые критерии отчетности об измерениях с переменным порогом или смещением, а также вторые измерения и вторые критерии отчетности об измерениях, которые являются отложенными. Вторые измерения и критерии отчетности конфигурируются совместно с информацией о времени, поэтому устройство UE выполняет эти измерения и предоставляет отчетность, только начиная с соответствующего момента времени, заданного информацией о времени. Чтобы устройство UE имело возможность выполнять вторые измерения, они могут быть согласованы с промежутками для измерений в направлении восходящего канала (UL) и/или нисходящего канала (DL). Эти промежутки могут быть предусмотрены в канале DL, т.е. базовая станция может останавливать передачу по каналу DL, начиная с указанного момента времени, при этом промежутки для измерений в канале DL оказываются отложенными, как и сами измерения. Кроме того, только устройству UE разрешается устанавливать промежутки в канале UL, т.е. не выполнять передачу, начиная с указанного момента времени, при этом промежутки в канале UL также являются отложенными.
Этот аспект позволяет базовой станции конфигурировать измерения на основе переменных значений порога или смещения, в результате чего базовая станция получает информацию об отклонении канала связи между устройством UE и спутником от ожидаемого состояния. Кроме того, базовая станция конфигурирует, например, измерения в соседних сотах и соответствующие промежутки для того момента, когда ожидается, что показатель качества связи уменьшится ниже определенного порога. При такой конфигурации устройство UE может самостоятельно начинать измерения в соседних сотах и использовать промежутки, при этом базовая станция может рассчитывать на то, что устройство UE будет сообщать о неожиданных изменениях, чтобы обеспечить изменение параметров измерений, промежутков и/или других элементов конфигурации.
Такая конфигурация измерений позволяет экономить радиоресурсы, а также вычислительные ресурсы в устройстве UE и в базовой станции, необходимые для производительности и отчетности об измерениях, в то же время обеспечивая постоянное информирование базовой станции о качестве соответствующего канала связи. Очевидно, что если все изменения характеристик канала соответствуют ожидаемым, информация о качестве канала связи неявно определяется базовой станцией по отсутствию отчетов об измерениях.
Еще один аспект этого изобретения заключается в том, что базовая станция конфигурирует изменяющиеся во времени периодические сообщения об измерениях. Базовая станция может изменять количество накапливаемых при измерении значений и/или периодичность отчетности об измерениях на разных участках, например, чаще на проблемных участках и реже в идеальных условиях, таком образом уменьшая общее количество накапливаемых при измерении значений и/или отправляемых отчетов об измерениях.
Другим соответствующим аспектом является самостоятельное инициирование хэндовера базовой станцией в отсутствие триггера для отчета об измерениях, а лишь на основе неявно полученных в базовой станции знаний о том, когда ожидаются лучшие условия в соседней соте, чем условия в обслуживающей соте, и в отсутствие полученных отчетов об измерениях с информацией о непредвиденных ситуациях. Хэндовер может осуществляться просто по времени, т.е. базовая станция устанавливает таймер и хэндовер начинается по срабатыванию таймера. Прием отчета об измерениях от устройства UE до срабатывания таймера может изменить, сбросить или остановить таймер в зависимости от полученных результатов измерений.
Подобным образом базовая станция может использовать этот механизм для выполнения сценариев объединения несущих или двойного подключения. Как при объединении несущих, так и при двойном подключении устройство UE подключается к сети параллельно на нескольких несущих. При объединении несущих устройство UE обычно подключается на нескольких несущих к одной и той же базовой станции или к двум базовым станциям посредством соединения с малой задержкой (оптоволоконного или с тем же хост-компьютером). При двойном подключении эти несущие используются для подключения устройства UE к другой базовой станции посредством неидеального соединения, которое может использоваться для параллельного подключения устройства UE к двум спутникам. В этом случае один спутник обеспечивает покрытие в главной соте, а другой (или другие) - во вторичной соте (сотах). В соответствии с данным изобретением базовая станция может опираться на измерительную информацию от устройства UE, чтобы получать информацию о неожиданных уровнях сигнала и, таким образом, добавлять или удалять вторичные несущие по срабатыванию таймера и при отсутствии отчетов об измерениях.
Базовая станция может, например, добавлять несущую к уже установленному с первым спутником каналу связи, при этом новая несущая предназначена для второго спутника. Это добавление может быть основано на знании того, что в определенный момент времени второй спутник будет в зоне досягаемости и с достаточно высоким качеством канала связи, если устройство UE не предоставляет отчет об измерениях, свидетельствующий об обратном. Подобным образом базовая станция может удалять несущую второго спутника, используемую параллельно первому каналу связи с первым спутником, на основе знания траектории спутника и соответствующих изменений канала связи.
В варианте, альтернативном описанному выше аспекту, базовая станция также может настраивать устройство UE на добавление или удаление несущих для подключения по расписанию, причем момент времени для добавления или удаления несущих определяется базовой станцией на основе заранее известного движения спутника относительно устройства UE. После этого устройство UE добавляет или удаляет несущие в заданное при конфигурировании время без дополнительных команд, например, без реконфигурирования со стороны базовой станции. Базовая станция должна синхронно добавлять или удалять несущие, поэтому передатчик и приемник синхронизированы. Устройство UE может быть настроено на возможность отказа от предусмотренного конфигурацией использования дополнительной несущей на основе результатов измерений и на возможность передачи отчета об измерениях, чтобы информировать базовую станцию об этой ситуации.
Еще один аспект настоящего изобретения состоит в использовании описанных выше аспектов в устройстве UE при автономном выполнении устройством UE измерений в соседних сотах с целью повторного выбора соты, например в режиме ожидания. Устройство UE может быть настроено на выполнение измерений для повторного выбора соты, т.е. повторного выбора спутника, лишь в то время, когда ожидается, что подходящие для этой цели спутники будут в зоне досягаемости. В противном случае устройство UE может сэкономить ресурсы, пропуская измерения, т.е. пропуская поиск соседней заведомо отсутствующей соты, даже если уровень RSS спутника, к которому в настоящее время относится устройство UE, будет инициировать такой поиск и соответствующие измерения согласно существующим правилам.
Краткое описание чертежей
Далее, лишь в качестве примера, описаны предпочтительные варианты осуществления изобретения со ссылкой на приложенные чертежи.
Фиг. 1 иллюстрирует изменение положения спутника на орбите относительно устройства UE.
Фиг. 2 иллюстрирует спутниковую систему с несколькими спутниками на нескольких орбитах.
Фиг. 3 иллюстрирует изменение во времени измеренного уровня сигнала и переменного порога.
Фиг. 4 иллюстрирует прием устройством UE реконфигурационного сообщения после падения уровня сигнала ниже порогового значения.
Фиг. 5 иллюстрирует выполнение измерений на обслуживающей станции и соседней станции.
Фиг. 6 иллюстрирует эффект Доплера в спутниковой связи.
Фиг. 7 иллюстрирует алгоритм определения расчетного положения.
Фиг. 8 иллюстрирует использование доплеровского сдвига для определения положения.
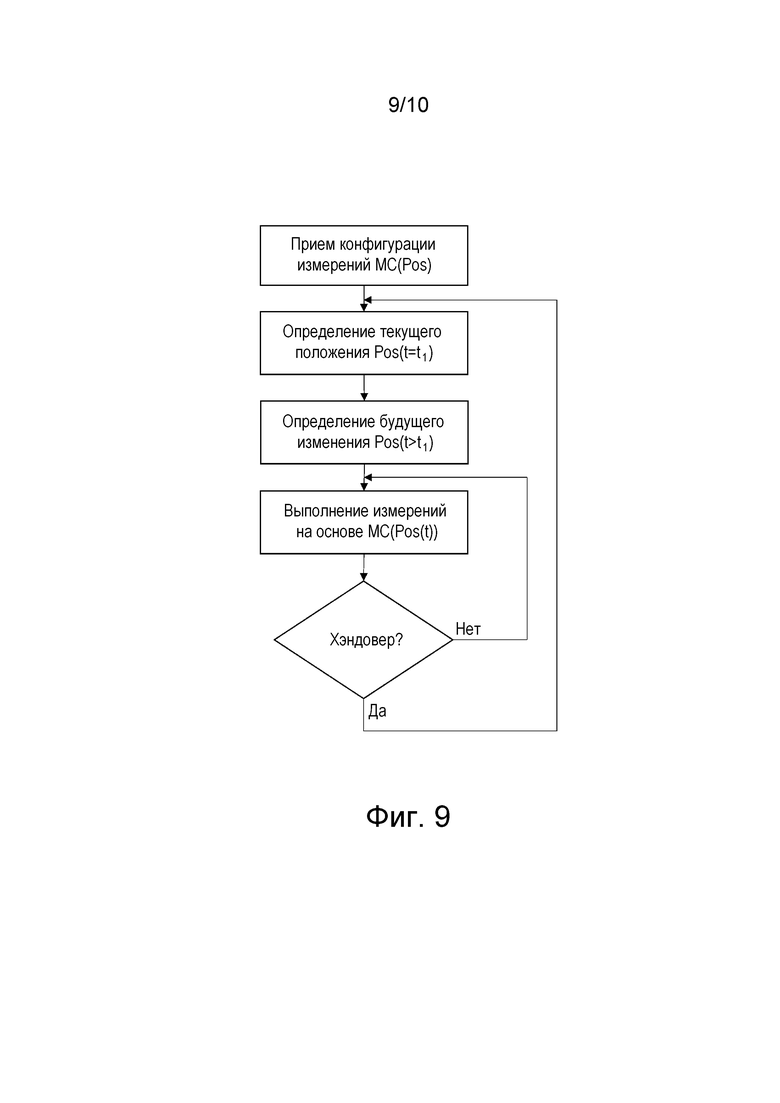
Фиг. 9 иллюстрирует алгоритм определения положения и конфигурацию измерений для одиночного спутника.
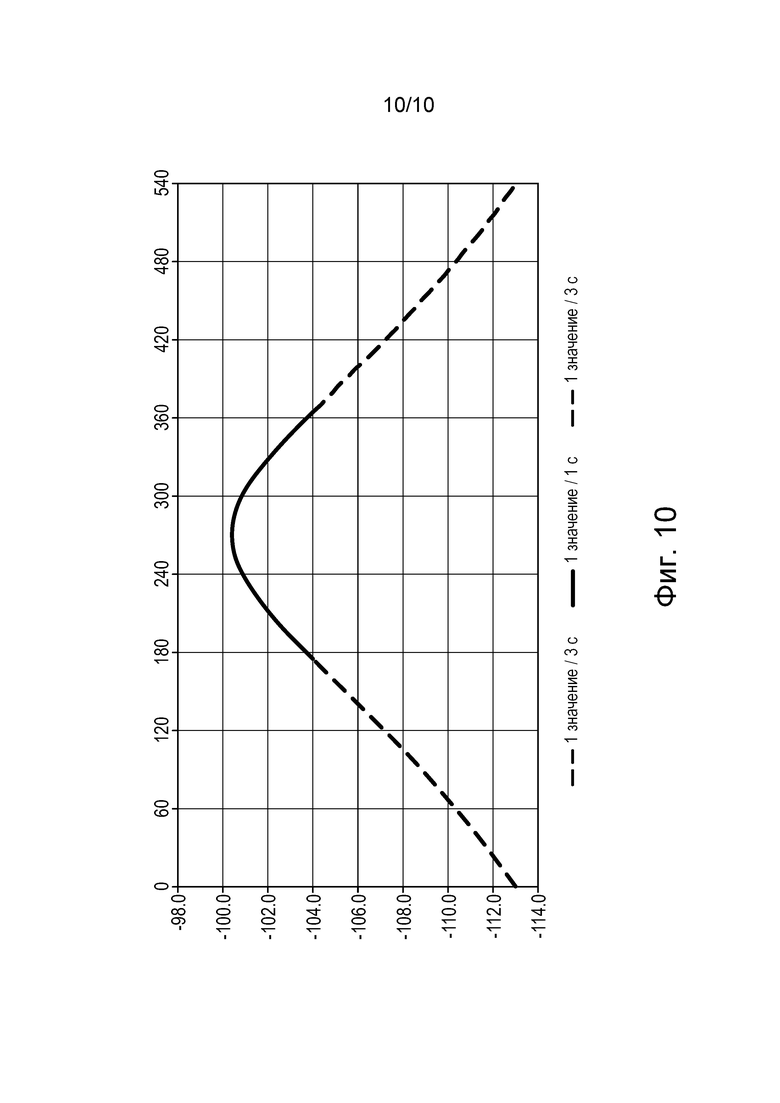
Фиг. 10 иллюстрирует изменение измеряемой частоты в зависимости от положения спутника.
Осуществление изобретения
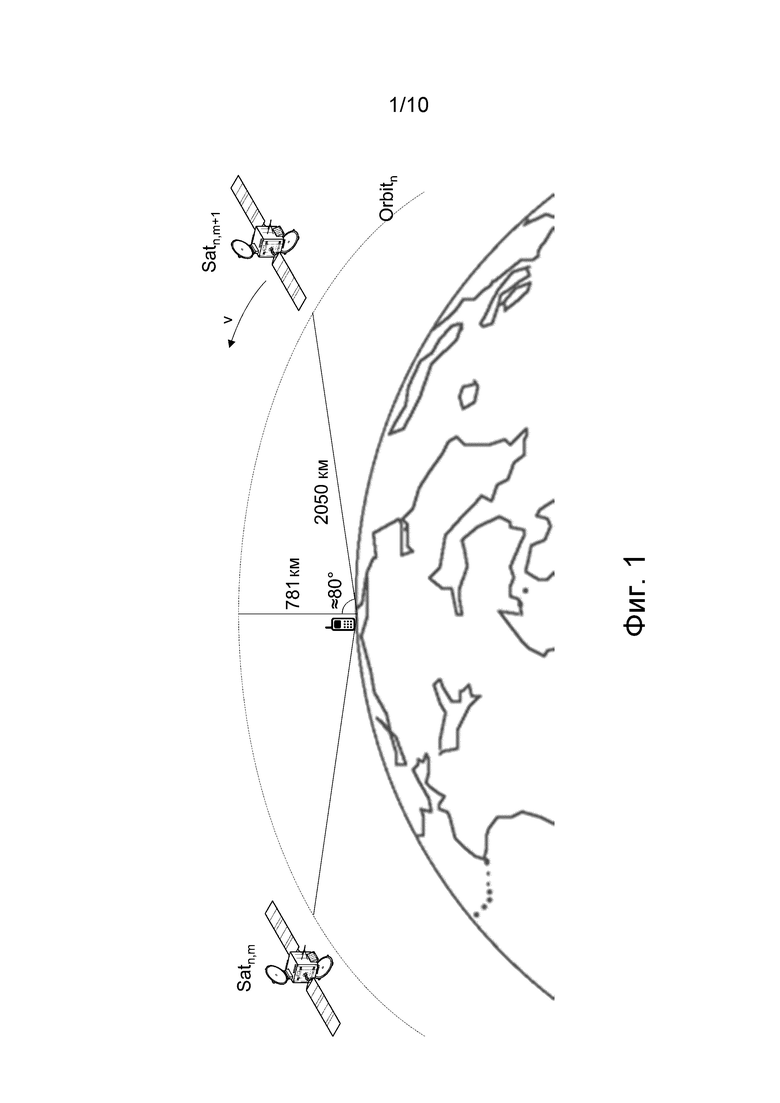
На фиг. 1 представлен пример сети радиодоступа на основе спутников LEO. На этом чертеже показаны два спутника (Satn, m и Satn, m+1), где индекс m относится к спутникам на одной орбите (Orbit n). На фиг. 1 приведено два типичных примера, характеризующих расстояние до спутников LEO: высота спутников над поверхностью земли (781 км) и типичное расстояние до спутника, который появился в зоне видимости из наземной точки и находится под углом порядка 10 над горизонтом (2050 км).
В приведенном примере время между появлением спутника из-за горизонта и его уходом за горизонт на противоположной стороне составляет 9 минут. Из фиг. 1 становится ясно, что потери при распространении сигнала в канале связи между наземным устройством UE и спутником и время задержки изменяются в течение этих 9 минут значительно и в целом предсказуемым образом.
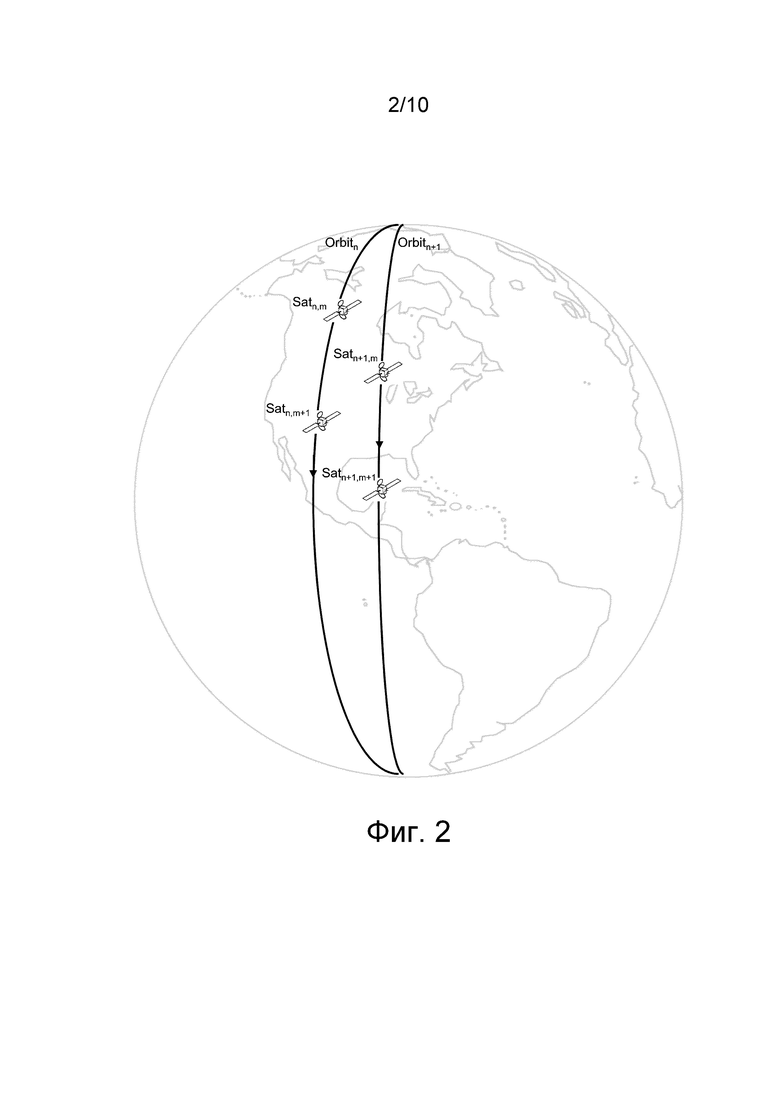
На фиг. 2 показан подобный пример с двумя орбитами (Orbitn и Orbitn+1), где индексы n определяют все орбиты, которые может содержать спутниковая сеть радиодоступа, обычно их шесть. На каждой орбите показаны только два спутника (с индексами m и m+1, соответственно), хотя обычно на орбите присутствуют одиннадцать спутников. Ближайшие спутники на соседних орбитах могут быть смещены на половину расстояния между спутниками на одной орбите, поэтому устройства UE, находящиеся на земной поверхности в точке между плоскостями орбит, могут обслуживаться спутниками, находящимися на чередующихся орбитах.
Вариант на фиг. 1 и фиг. 2 сходен со спутниковой системой, развернутой в настоящее время на низкой околоземной орбите. Данное изобретение применимо и для других вариантов с другим количеством спутников, другим количеством орбит, другим наклоном орбит, другой высотой и скоростью спутников и т.д.
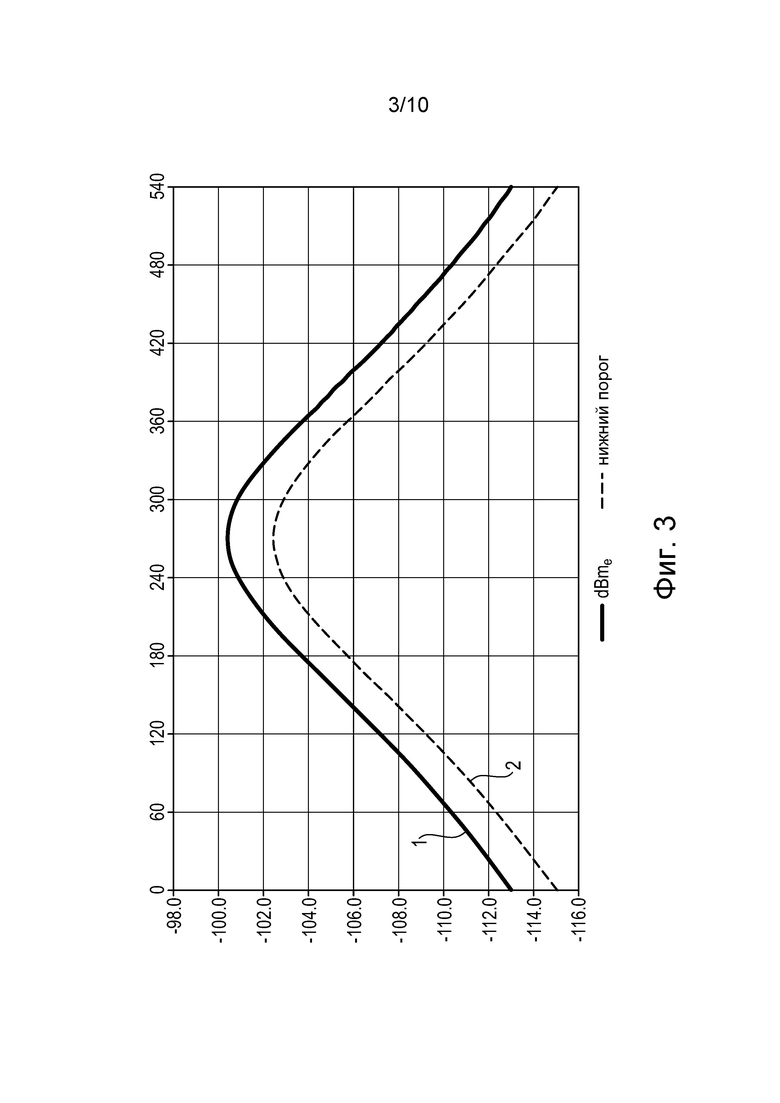
На фиг. 3 представлен график, содержащий пример зависимости ожидаемого уровня принимаемого сигнала (RSS, Received Signal Strength), выраженного в дБм, от времени в секундах при одном (девятиминутном) проходе спутника, показанный сплошной линией 1. При этом геометрические соотношения соответствуют фиг. 1, а для вычисления уровня RSS (dBme) используется следующая формула:
dBme = dBm0 - 10 n log10 (r/R),
где r - текущее расстояние от устройства UE до спутника в соответствии с геометрическими соотношениями, приведенными на фиг. 1, R = 2050 км - максимальное расстояние от устройства UE до спутника с поддерживаемым каналом связи, n = 3 - показатель, характеризующий потери при распространении (n = 2 для условий прямой видимости в вакууме, n = 4 для типичной городской среды), dBm0 - минимальный уровень RSS, обнаруживаемый типичным устройством UE, он установлен равным - 113 дБм.
Устройство UE может быть настроено базовой станцией на измерение уровня RSS канала связи между устройством UE и спутником, обслуживающим это устройство UE. Зная характеристики движения спутника, т.е. его орбиту и положение на ней, можно ожидать, что уровень RSS будет изменяться, как показано на фиг. 3 сплошной линией 1. В соответствии с данным изобретением базовая станция может конфигурировать триггерное событие для отчета на основе порога, настроенного на изменение во времени по закону, показанному на фиг. 3 нижней пунктирной линией 2. При такой конфигурации порога гарантируется, что базовая станция будет получать информацию о любом значительном отклонении измеренного уровня RSS от ожидаемого значения.
Отклонение, инициирующее триггерное событие для отчета, может быть настроено на постоянную абсолютную величину смещения вверх или вниз от ожидаемого значения, относительную величину смещения вверх или вниз или их комбинацию. В альтернативном варианте может применяться пошаговое определение, т.е. в течение определенного времени может действовать постоянное абсолютное или относительное смещение, после чего может действовать другое постоянное абсолютное или относительное смещение.
В данном примере базовая станция может интересоваться неожиданным снижением уровня сигнала в текущем канале между устройством UE и спутником, поэтому, согласно фиг. 3, можно настроить порог на 2 дБм ниже ожидаемого значения. В результате устройство UE будет отправлять отчет об измерениях, когда измеренный уровень RSS упадет на 2 дБм ниже ожидаемого значения.
Измеренный уровень RSS может сглаживаться устройством UE любыми известными способами, например путем усреднения результатов нескольких последовательных измерений. Это полезно для исключения отчетности при кратковременном снижении уровня сигнала, например вследствие быстрого замирания, рассеяния или другого воздействия окружающей среды. Функция сглаживания может быть параметризована так, чтобы изменяться во времени в соответствии с заранее заданным или настроенным изменением, учитывающим траекторию спутника.
Для настройки переменного порога базовой станцией для устройства UE могут применяться несколько возможных механизмов, отдельно или в комбинациях.
В устройстве UE может быть реализована и может быть известной базовой станции заранее заданная функция, например,
dBmth(t) = dBm0 - 10 n/2 log10 (a - b cos(t*j)),
где параметры dBm0, n, a, b и j настраиваются базовой станцией, а t - время между опорной точкой отсчета времени t0 и текущим временем.
Опорная точка отсчета времени t0 может быть временем приема конфигурационного сообщения от базовой станции или постоянной величиной относительно начального момента времени для общего описания ожидаемого уровня RSS.
Любая из указанных выше констант может быть зафиксирована, например, в нормативном документе, или сконфигурирована, как описано выше, или транслирована данным спутником либо любыми спутниками спутниковой сети радиодоступа. Функция, используемая в устройстве UE, может быть аналогичной приведенной в примере выше или может отличаться от него, при этом базовая станция может использовать для настройки устройства UE большее или меньшее количество параметров. В альтернативном примере основные параметры могут быть зафиксированы или могут транслироваться, и только один или два дополнительных параметра, описывающих конкретную ожидаемую кривую уровня RSS, зависящую от положения устройства UE, настраиваются базовой станцией. В еще одном альтернативном варианте основные параметры могут быть зафиксированы или могут транслироваться, а устройство UE может вычислять собственный уточненный вариант кривой, исходя из своего положения относительно спутника. В еще одном альтернативном варианте устройству UE может предоставляться идентификатор функции, чтобы устройство UE выбрало заранее известную функцию из набора функций.
В примере на фиг. 3 измеренный уровень RSS не может существенно отклоняться от ожидаемого значения, поэтому базовая станция знает тенденцию изменения уровня RSS и, следовательно, косвенно знает характеристики канала связи между устройством UE и спутником. Если, например, базовой станции необходимо перенастроить соединение на повышенную скорость передачи данных, как только уровень RSS превысит порог -106 дБм, базовая станция может полагать, что это произойдет в момент времени, близкий к t = 140 с, и для этого не требуется обмен отчетами об измерениях с устройством UE. Это большое преимущество по сравнению с известными техническими решениями, поскольку в известных технических решениях момент времени пересечения любого значимого фиксированного порогового значения определяется в результате анализа ожидаемого изменения уровня RSS с отправкой отчета об измерениях и с необходимостью изменения конфигурации измерений. При этом в отчете об измерениях в основном может содержаться очевидная информация.
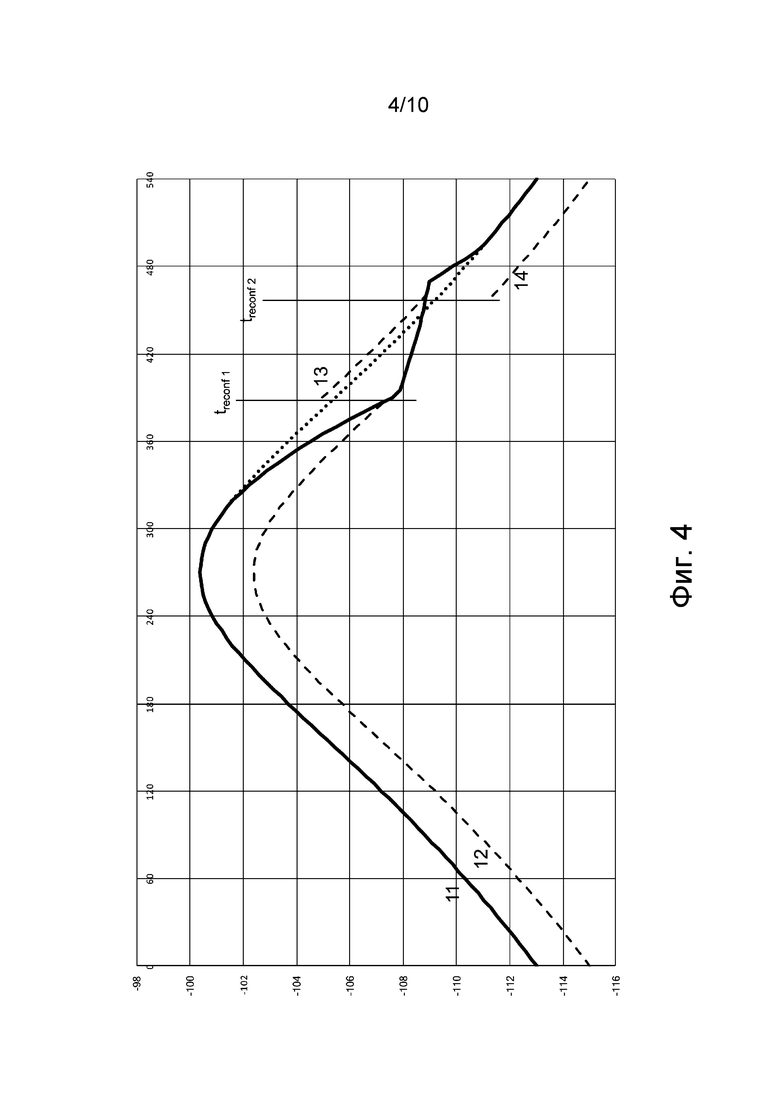
Фиг. 4 иллюстрирует другой пример настройки и начального конфигурирования, аналогичный примеру, описанному со ссылкой на фиг. 3. Устройство UE может быть настроено на измерение уровня RSS обслуживающего спутника и на формирование отчетов об измерениях каждый раз, когда измеренное значение падает ниже переменного порога, показанного штриховой линией 12. Измеренное значение, показанное сплошной линией 11, может изменяться приблизительно в течение 320 с без значительного отклонения от ожидаемых значений (пунктирная линия). Затем измеренное значение может уменьшаться быстрее, чем ожидалось, и в момент времени treconf 1 падать ниже заданного порога. В этот момент времени устройство UE, в соответствии со своими критериями отчетности, формирует отчет об измерениях, содержащий измеренное значение, и передает этот отчет на базовую станцию.
Отчет об измерениях может инициировать в базовой станции изменение конфигурации отчетности об измерениях, выполняемых устройством UE, например, об измерениях в отношении соседней соты (соседнего спутника), включая подготовку информации о пригодных для хэндовера спутниках, характеристики которых следует измерять, а также о промежутках для измерений, позволяющих устройству UE выполнять измерения в соседней соте. Кроме того, базовая станция может сконфигурировать новое событие и порог для обслуживания спутниковых измерений, чтобы устройство UE сообщало, когда уровень RSS обслуживающего спутника превышает порог, показанный штриховой линией 13 на фиг. 4.
После этого приблизительно в течение 80 секунд устройство UE выполняет измерения, на которые оно сконфигурировано, при этом используя необходимые ресурсы, например радиоресурсы промежутков для измерений и время для перенастройки на другую радиочастоту. В дальнейшем в какой-то момент времени treconf 2 измеренный уровень RSS обслуживающего спутника может достичь порога для отчетности о надлежащем качестве канала связи и базовая станция может перенастроить измерительные критерии устройства UE, исключив необходимость измерения характеристик соседних спутников и использования соответствующих промежутков и настроившись на меньший динамический порог (штриховая линия 14) для информирования о том, что уровень RSS упал ниже этого порога.
Как ясно видно на фиг. 4, пошаговые действия, предусмотренные в изобретении для обеспечения динамического изменения порога, позволяют реализовать эффективную и результативную отчетность об измерениях, не сообщая при этом об очевидных изменениях канала связи между устройством UE и спутником.
Если происходит хэндовер устройства UE к целевому спутнику с той же ожидаемой траекторией, то может сохраняться та же конфигурация, она просто сбрасывается во время хэндовера и перезапускается с момента возникновения ситуации, показанной на фиг. 4, или с момента времени, представляющего текущее состояние соединения между устройством UE и целевым спутником после хэндовера (более подробные сведения о расчете этого момента приведены ниже).
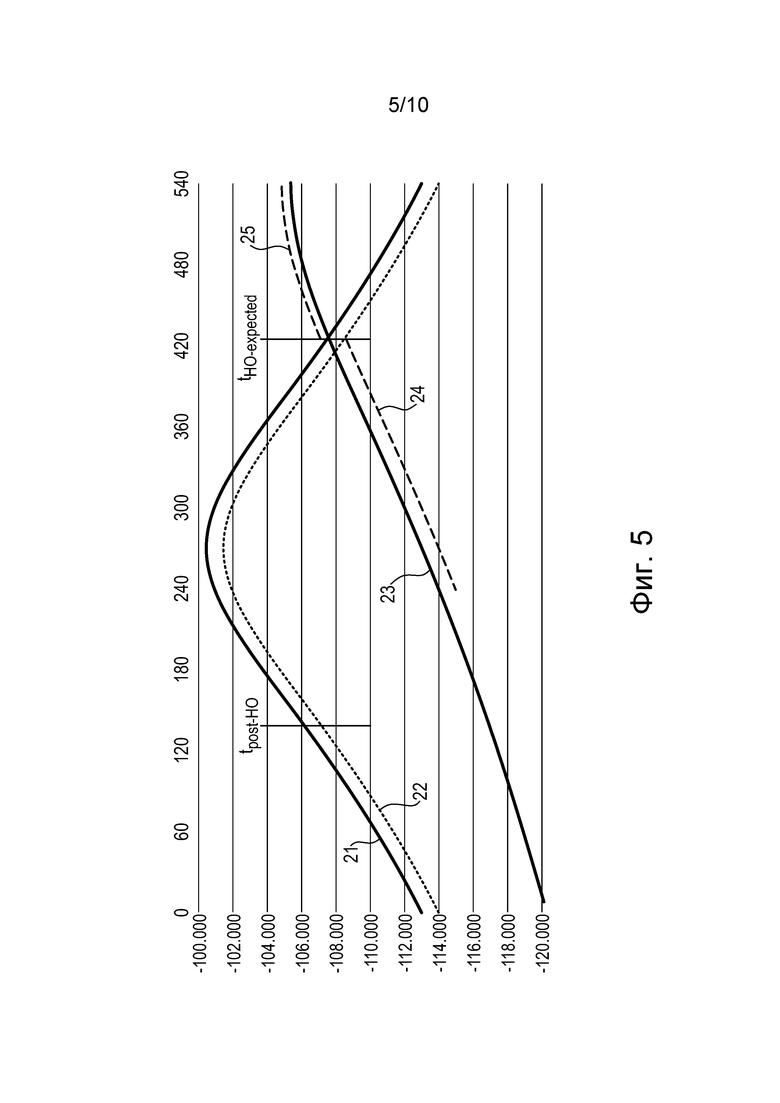
На фиг. 5 представлен график, подобный графику с фиг. 4, показывающий ожидаемое изменение уровня принимаемого сигнала в устройстве UE во времени для обслуживающего спутника 21. Кроме того, на фиг. 5 показан ожидаемый уровень RSS соседнего спутника, например, спутника на соседней орбите 23. Согласно описанному выше аспекту, базовая станция может настраивать устройство UE на измерительное событие на основе падения уровня RSS обслуживающего спутника ниже порогового значения, причем пороговое значение изменяется в соответствии с известной или настраиваемой функцией 22, поэтому базовая станция может воспринимать отсутствие отчета об измерениях как указание на ожидаемый уровень RSS.
Согласно одному аспекту данного изобретения, обслуживающая базовая станция может настраивать устройство UE на измерение характеристик соседнего спутника и на сравнение измеренных уровней RSS обслуживающего и соседнего спутников. Начало этого измерения характеристик соседней соты, как показано на фиг. 5, может быть отложено до момента времени, когда, по ожиданию базовой станции, это измерение будет иметь смысл. В этом примере устройство UE может быть настроено на измерение в соседней соте, начиная приблизительно с того момента времени, когда ожидается наивысшее качество канала связи с обслуживающим спутником. Следует отметить, что настройка устройства UE ожидается на более раннем этапе, например, в момент времени, близкий к t = 0 с на фиг. 5, или во время более раннего прохода спутника, поэтому измерение в соседней соте откладывается во времени согласно инновационному аспекту данного изобретения.
Отложенное измерение характеристик соседней соты может сопровождаться настройкой промежутка для измерений, также отложенной до того же момента времени, при этом соответствующие измерения могут быть выполнены устройством UE без изменения конфигурации.
Сравнение характеристик обслуживающей соты и соседней соты может быть настроено так, чтобы отчет отправлялся устройством UE, если уровень RSS обслуживающей базовой станции падает ниже уровня RSS соседней соты на величину смещения. Если в приведенной в примере ситуации уровень измеряемого сигнала соседней соты соответствует ожидаемому (сплошная линия 23), то критерием отчетности может быть падение уровня RSS обслуживающей соты ниже кривой, показанной на чертеже штриховой линией 24.
Кривые изменения ожидаемого уровня сигнала обслуживающей соты и соседней соты пересекаются в момент времени, обозначенный на фиг. 5 как tHO-expected. Ориентировочно в это время базовая станция может инициировать хэндовер, поскольку связь с соседней сотой становится лучше, чем с обслуживающим спутником. Одна из целей данного изобретения состоит в исключении необходимости передачи устройством UE отчетов об измерениях, содержащих очевидную информацию, поэтому измерительный критерий, основанный на падении уровня RSS обслуживающей соты ниже уровня соседней соты на величину смещения, может быть исключен. Это исключение измерительного критерия настраивается на тот момент времени, на который уже было настроено измерение характеристик соседней соты, т.е. уже была настроена изменяющаяся во времени конфигурация измерений. В этом примере изменение конфигурации измерений может осуществляться по времени. В других примерах любой вид измерений, т.е. любые измерения, позволяющие устройству UE оценивать состояние канала связи или положение любого из спутников относительно устройства UE, может привести к изменению применяемой конфигурации (более подробные сведения об этом приведены ниже).
Дополнительный критерий отчетности об измерениях может быть настроен базовой станцией таким образом, что его применение устройством UE откладывается до момента времени после ожидаемого хэндовера. Например, как показано на фиг. 5, базовая станция может направить запрос устройству UE, по которому оно должно, начиная с данного момента и до тех пор, пока фактически не произойдет хэндовер, сообщать о любой ситуации, в которой уровень принимаемого сигнала обслуживающей соты выше уровня сигнала соседней соты на величину второго смещения. Кривая 25 на фиг. 5 показывает сумму уровня RSS соседней соты и соответствующего второго смещения. Иными словами, с момента, когда можно ожидать, что соседний спутник может обеспечивать лучшую связь, устройство UE сообщает о неожиданном обратном событии (если оно происходит). Это относится к ситуации, когда хэндовер еще не произошел, а уровень сигнала соседнего спутника падает ниже уровня сигнала обслуживающей соты на величину второго смещения и фактический хэндовер еще может быть отложен базовой станцией.
Иными словами, в этом примере осуществления данного изобретения отчетность об измерениях настраивается так, чтобы обеспечить отчеты лишь о неожиданных результатах измерений. Пока ожидается, что обслуживающая сота будет лучшей сотой, отчеты об измерениях инициируются, если уровень RSS обслуживающей соты падает ниже уровня соседней соты на величину смещения. Когда ожидается, что соседняя сота будет лучшей сотой, отчетность об измерениях изменяется так, что она инициируется падением уровня RSS соседней соты ниже уровня обслуживающей соты на величину смещения.
Момент времени, в который изменяется применяемая конфигурация измерений, представляет собой ожидаемую точку хэндовера. Тем не менее, фактическая точка хэндовера определяется решением базовой станции, на которое могут влиять другие параметры, например занятость соседних сот, доступные радиоресурсы и вычислительные ресурсы базовых станций для инициирования и выполнения хэндовера. Таким образом, момент времени хэндовера может изменяться и поэтому автономное изменение конфигурации измерений в устройстве UE повышает эффективность измерений и позволяет улучшить показатели хэндовера в случае возникновения непредвиденных событий, когда соседняя сота не становится лучшей сотой в ожидаемый момент времени. Момент изменения применяемой конфигурации измерений устанавливается базовой станцией и он, например, может наступить раньше ожидаемого хэндовера или может оказаться в прогнозируемой точке пересечения двух кривых уровня RSS, но фактический хэндовер планируется базовой станцией и должен произойти спустя короткое время, чтобы обеспечить достаточное качество сигнала соседней соты. Во всех этих случаях данное изобретение обеспечивает средства для реализации эффективной отчетности об измерениях при минимальном количестве передаваемых сигналов.
Когда фактически происходит хэндовер, т.е. когда базовая станция с помощью сообщения о хэндовере, например, сообщения с командой хэндовера, инициирует переключение устройства UE на целевой спутник, конфигурация измерений может быть легко изменена исходной или целевой базовой станцией или устройством UE автономно для нового относительного состояния целевого спутника, например для точки tpost-HO на фиг. 5. Из-за периодичности кривых точка tpost-HO изображена на том же чертеже, хотя фактически точка tpost-HO расположена за точкой tHO-expected. Поэтому измерения в соседней соте не выполняются и соответствующие смещения сбрасываются. В качестве альтернативы, во время хэндовера конфигурирование измерений может быть выполнено целевым устройством UE повторно или оно может быть повторно выполнено лишь частично, например путем обновления информации о том, для какого соседнего спутника необходимо выполнять измерения (частота/код), сохраняя неизменной информацию о времени и смещении.
Вариант осуществления другого аспекта настоящего изобретения представлен на фиг. 10. Базовая станция может настраивать периодическое формирование отчетов об измерениях в устройстве UE, при этом периодичность измерений или количество значений, взятых за единицу времени, может отличаться в разное время. В примере на фиг. 10 устройству UE могут быть предоставлены две конфигурации, одна из которых должна применяться при ожидаемом низком качестве канала связи в первых временных интервалах 0 с < t < 170 с и 370 с < t < 540 с, а другая - при ожидаемом высоком качестве канала связи во втором временном интервале 170 с ≤ t ≤ 370 с. В первых временных интервалах (штриховая линия) конфигурация может предусматривать передачу устройством UE отчетов, содержащих результаты измерения уровня RSS обслуживающей соты, один раз в секунду, а во втором временном интервале (сплошная линия) - передачу устройством UE отчетов один раз в три секунды.
Другим важным аспектом данного изобретения является применение в устройстве UE текущих и будущих измерительных конфигураций на основе общей конфигурации измерений для прогнозируемого периода прохода одного спутника и оценки в устройстве UE текущего относительного положения спутника. Эти конфигурация и оценка позволяют устройству UE применять правильные параметры текущей конфигурации измерений.
Общая конфигурация может содержать различные параметры, которые введены в данном изобретении на основе виртуального периода прохода спутника. Положение спутника на траектории можно обозначать углом над горизонтом, под которым виден спутник из точки, в которой находится устройство UE. Этот угол может изменяться от 0° до 180°, хотя реально могут использоваться углы в диапазоне от 10° до 170°. Для обобщенного описания устройство UE и базовая станция неизбежно имеют определенный интервал значений, т.е. базовая станция и устройство UE просто знают, что представляет собой конфигурация параметров для разных углов. После этого базовая станция может настраивать разные функции или параметры для разных интервалов значений соответствующего угла.
В альтернативном варианте для конфигурирования может использоваться время прохода. Для спутников в приведенных примерах оно изменяется в пределах от t = 0 с до t = 9 мин = 540 с. Для других орбит спутников это время может быть большим или меньшим. При описании данного изобретения на чертежах, иллюстрирующих примерные уровни RSS, пороги и смещения, использован пример с девятиминутным временем прохода. После этого базовая станция может настраивать разные функции или параметры для разных интервалов значений разности текущего времени и определенного момента времени t0 = 0 с.
Кроме времени и угла, могут использоваться другие величины, например некоторая виртуальная часть спутникового пути от 0% до 100% и т.п.
На фиг. 9 приведен пример блок-схемы для описываемого аспекта данного изобретения. Устройство UE может принимать от базовой станции конфигурацию измерений MC, которая является функцией положения Pos спутника относительно устройства UE. Как описано в приведенных выше примерах, эта функция может быть сконфигурирована либо как функция или параметры заранее известной функции (в виде нескольких измерительных конфигураций, применяемых последовательно), либо как пошагово определяемые пороги и смещения.
Затем устройство UE определяет текущее положение спутника относительно устройства UE в момент времени t1. Это определение может быть представлено в виде информации, полученной от базовой станции, ранее вычислившей положение Pos. В альтернативном варианте положение Pos оценивается в устройстве UE на основе времени, измерений, известных траекторий спутников и т.д.
Одновременно с предыдущим шагом или отдельно от него устройство UE определяет изменение положения Pos для следующего промежутка времени. Это определение может быть просто поиском заранее известной функции для изменения положения, параметризацией заранее известной функции с использованием параметров, полученных от базовой станции, или измерениями, выполняемыми самим устройством UE. Изменение положения Pos(t) может быть определено в виде функции, зависящей от времени t (как в примере на фиг. 9), от углового положения над горизонтом линии между устройством UE и спутником, или по другой подобной методике.
Далее устройство UE применяет конфигурацию измерений, настроенную для текущего времени (t), до хэндовера к другому спутнику и в этом случае устройство UE может повторно выполнять определение текущего положения спутника, теперь уже для целевого спутника хэндовера. Этот шаг гарантирует, что после хэндовера будет использоваться та же конфигурация измерений на основе вновь определенного положения нового спутника на траектории относительно устройства UE.
Блок-схема, приведенная на фиг. 9, описывает конфигурацию измерений и определение положения для одного спутника. Как описано здесь ранее, конфигурация измерений может предусматривать выполнение измерений и триггеры отчетности для нескольких спутников, например находящихся на разных орбитах. В этом случае сходные блок-схемы реализуются для других спутников, при этом может происходить возврат на шаг повторного определения, когда новый спутник на той же орбите берет на себя роль предыдущего обслуживающего или соседнего спутника, сигналы которого должны измеряться устройством UE.
Для оценки положения спутника на этом пути относительно устройства UE можно использовать любой из приведенных ниже примеров. Далее рассматриваются только качественные значения и методы их получения без вывода точных формул. Кроме того, все описанное ниже может использовать в качестве вышеуказанных характеристик положения угол, время, относительные величины или другие альтернативные варианты.
Оценка положения может быть выполнена с использованием информации о точном положении спутника и устройства UE, например, с применением глобальных навигационных спутниковых систем (GNSS), таких как GPS или ГЛОНАСС, для получения информации о положении и траектории устройства UE, а также о времени определения положения спутника. Как информация, имеющаяся в устройстве UE, так и информация, имеющаяся в базовой станции, достаточны для вычисления относительного положения. Это сравнительно просто, но использование GPS и точное знание траекторий спутников требует относительно больших ресурсов.
Другой пример оценки основан на измерении уровня RSS нескольких спутников и на информации об относительном положении этих спутников. Спутники могут транслировать идентификационную информацию, например, в составе своей системной информации, которая обеспечивает определение порядка расположения спутников на орбите (индекс m на фиг. 2) и/или орбиты, к которой относится соответствующий спутник (индекс n на фиг. 2). Сравнение результатов двух измерений, выполненных устройством UE для различных сигналов нисходящего канала разных спутников, о которых известно, что они находятся на разных орбитах со сдвигом на половину периода прохода (или 4,5 минуты в примерах с использованием спутников LEO) или с любым другим относительным сдвигом, может обеспечить достаточно точную оценку положения любого из этих спутников. Как показано на фиг. 5, получив при измерении, например, максимальный ожидаемый уровень RSS от спутника Satn, m и низкий, но обнаруживаемый уровень RSS от спутника Satn+1, m+1, устройство UE может оценить положение спутника Satn, m как 270 с в пределах периода, показанного на фиг. 5. В другом случае средний уровень RSS от спутника Satn, m и недостаточный для обнаружения уровень RSS от спутника Satn+1, m+1 (но обнаруживаемый уровень RSS от спутника Satn+1, m) могут соответствовать положению в диапазоне 60-70 с. Разумеется, что реальные измерения могут обеспечить более точное определение значений времени, чем оценочные, рассмотренные выше, например, с точностью до нескольких секунд или долей секунды.
Для приведенного выше примера можно получить более точный результат путем измерения разности уровней RSS двух последовательных измерений с определенным временным интервалом. Увеличение уровня RSS спутника может наблюдаться в первой половине периода прохода, а уменьшение уровня RSS может указывать на вторую половину прохода. В частности, знание точной разности и абсолютного значения может способствовать точной оценке положения спутника относительно устройства UE.
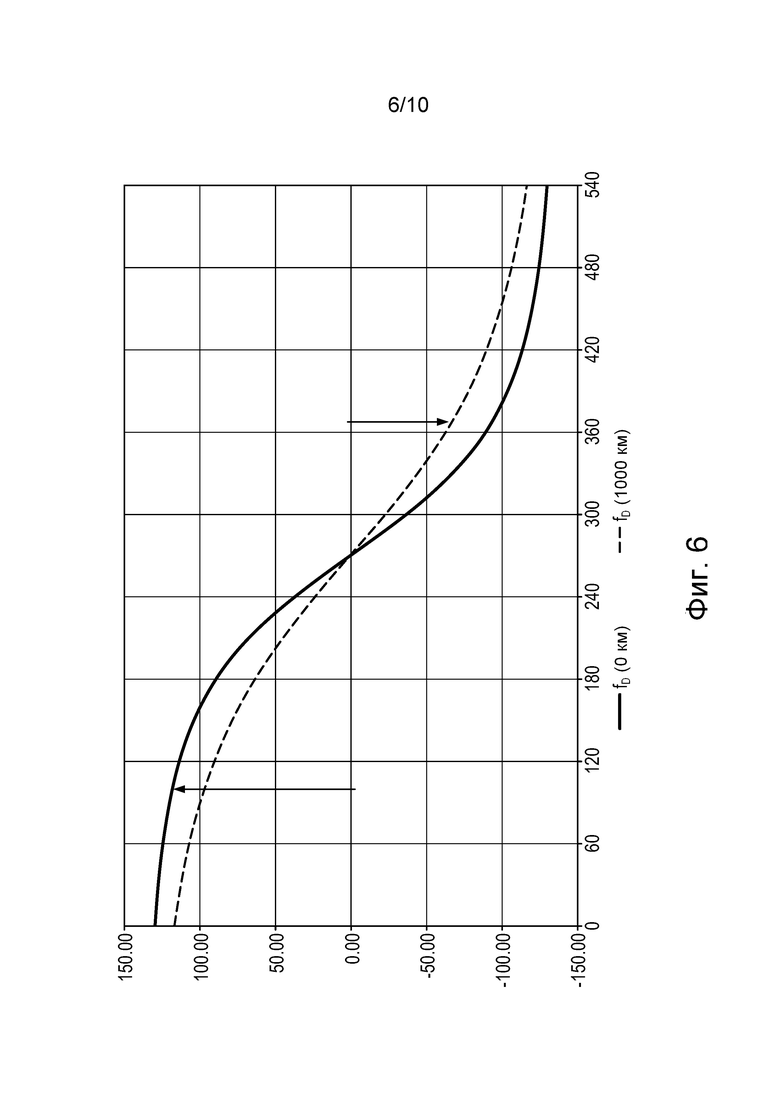
Другой пример оценки основан на измерении доплеровской частоты, т.е. на измерении отклонения частоты принятого сигнала от частоты переданного сигнала, вызванного скоростью движения спутника относительно устройства UE. Использование доплеровской частоты полезно, так как она устойчива к воздействию окружающей среды, например, к быстрому замиранию и рассеянию. Для спутников LEO, используемых в данном изобретении в качестве примера, на фиг. 6 показана доплеровская частота в килогерцах для периода прохода над наземным устройством UE, находящимся в плоскости орбиты спутника (сплошная линия), и над устройством UE, находящимся на расстоянии 1000 км от плоскости орбиты спутника (штриховая линия). Доплеровская частота показана для несущей частоты 2 ГГц, для других несущих частот будет наблюдаться линейное отклонение доплеровской частоты по сравнению с фиг. 6. Очевидно, что большая величина доплеровской частоты (порядка 80 кГц с соответствующими противоположными знаками) наблюдается в начале и в конце периода прохода. В фазе большого угла наблюдения спутника из места расположения устройства UE (т.е. когда спутник находится в зените над устройством UE) доплеровская частота быстро изменяется от +60 кГц до -60 кГц. Измеренное значение доплеровской частоты является хорошим показателем положения устройства UE относительно спутника. Выполнение нескольких измерений доплеровской частоты для оценки ее изменения повышает точность оценки положения.
Комбинируя описанные два метода оценки положения с использованием уровня RSS и доплеровской частоты, можно дополнительно повысить точность. Один из комбинированных способов заключается в том, что сначала определяют то, какое измерение из нескольких измерений RSS и нескольких измерений доплеровской частоты следует использовать для оценки. Значительное изменение результатов измерения уровня RSS может указывать на начальный или конечный участок периода прохода, где наилучшие результаты дают изменения уровня RSS в комбинации с учетом знака доплеровского смещения частоты, тогда как значительное изменение доплеровской частоты может указывать на средний участок периода прохода, где это измерение дает наилучшие результаты. На основе такого обнаружения для оценки положения выполняются соответствующие измерения. Другой комбинированный способ заключается в том, что сначала измеряется доплеровская частота и/или ее изменение у двух спутников для оценки положения этих спутников в период их прохода, а затем измеряется уровень RSS и/или его изменение для более точного расчета этого положения с учетом расстояния от устройства UE до плоскости орбиты спутника, которое нельзя оценить по измерению доплеровской частоты, поскольку это расстояние не оказывает существенного влияния на доплеровскую частоту, как показано на фиг. 6.
Кроме того, для определения орбиты, на которой находится обнаруженный спутник, можно использовать результаты измерения либо уровня RSS, либо доплеровской частоты, либо того и другого с учетом известных сведений о траекториях спутников. Если известен сдвиг периода прохода двух спутников на соседних орбитах, например, если этот сдвиг составляет половину периода прохода, то знака доплеровского смещения частоты и наклона ее характеристики может быть достаточно для определения того, какой спутник находится на какой орбите и в какой фазе периода прохода.
Для оценки относительного положения спутника в устройстве UE может быть предусмотрено другое измерение - измерение угла прихода (AoA, Angle of Arrival) принятого сигнала от спутника. Поскольку ориентация устройства UE может быть неизвестна или может меняться со временем, угол AoA может быть измерен для разных спутников, а дальнейшее знание траекторий спутников или дальнейшие измерения доплеровской частоты и/или уровня RSS могут быть использованы для оценки угла наклона спутника относительно горизонта с исключением влияния движения устройства UE.
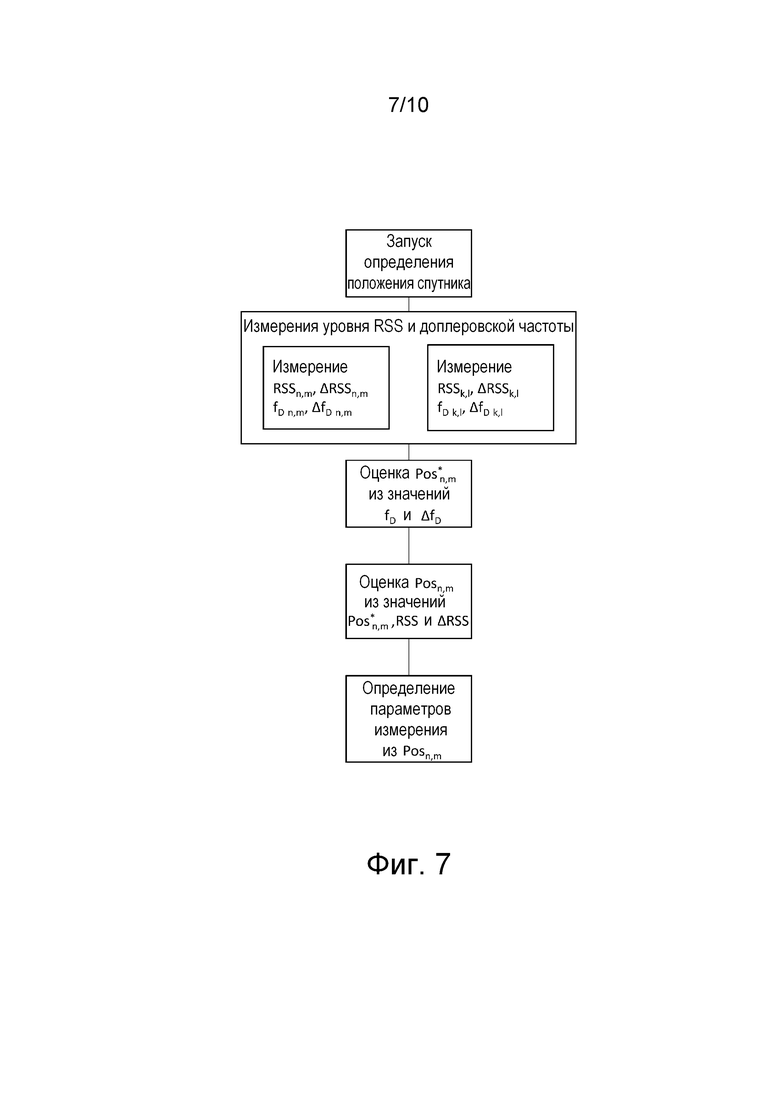
На фиг. 7 представлена функциональная схема примера для оценки положения в устройстве UE. Устройство UE может инициировать определение положения спутника автономно, т.е. оно может оценивать положение одного или нескольких спутников относительно устройства UE, используя метод определения положения, реализованный в устройстве UE. Определение положения может быть основано на измерениях, относящихся к одному или нескольким спутникам. На фиг. 7 показан соответствующий способ для двух спутников Satn, m и Satl, k, являющихся спутниками m и k на орбитах n и l, соответственно. Орбиты могут быть совпадающими (n = l), а спутники - соседними (k = m+1 или k = m-1) или орбиты могут быть соседними (l = n+1 или l = n-1), а спутники - соседними, потенциально сдвинутыми на орбите друг относительно друга на долю периода (k = m или k = m+1, если считать, что у ближайших спутников на соседних орбитах одинаковый индекс).
Устройство UE может, например, измерять уровень RSS и доплеровскую частоту fD для спутника Satn, m. Несколько таких измерений в разное время, например с интервалом 1 с или 5 с, могут использоваться для оценки наклона кривых уровня RSS и доплеровской частоты, обозначенного ΔRSS и ∆fD на фиг. 7. Такие же измерения могут быть выполнены для спутника Satk, l. Эти несколько измерений могут мультиплексироваться по времени с несколькими измерениями для спутника Satn, m, поэтому в одном измерительном поле параллельно показаны два измерительных блока - отдельно для каждого спутника.
По результатам измерений на основе доплеровской частоты, fD n, m, fD k, l, ΔfD n, m и ∆fD k, l, а также потенциально доступной информации о взаимном положении двух соответствующих спутников устройство UE выполняет первую оценку положения для Pos*n, m и, возможно, Pos*l, k, последнее не показано на чертеже, поскольку измерения могут использоваться для оценки положения только одного спутника. Эта оценка может быть основана на заранее известной зависимости, аналогичной показанной на фиг. 6. Например, устройство UE может выполнить два измерения частоты fD для каждого из двух спутников и получить значения 118 кГц и 117 кГц (для спутника Satn, m), а также - 69 кГц и - 71 кГц (для спутника Satk, l), соответственно. Если известно, что два спутника на разных орбитах сдвинуты на половину периода прохода, т.е. на 270 с, поиск по кривой, показанной на фиг. 6 (или по аналогичным данным в устройстве UE), приводит к тому, что спутник Satn, m находится в точке t = 100 с, а спутник Satl, k - в точке t = 270 с, которые показаны стрелками на фиг. 6. Если устройство UE в этой точке еще не знает, на каком расстоянии оно находится от плоскостей двух орбит, измерения доплеровской частоты не позволяют получить очень точную оценку. Как показано на фиг. 6, весьма небольшие ошибки измерения могут привести к большому отклонению по расстоянию, например, точки, соответствующие кривым доплеровской частоты, показанным сплошной и штриховой линиями, находятся на расстоянии 1000 км друг от друга.
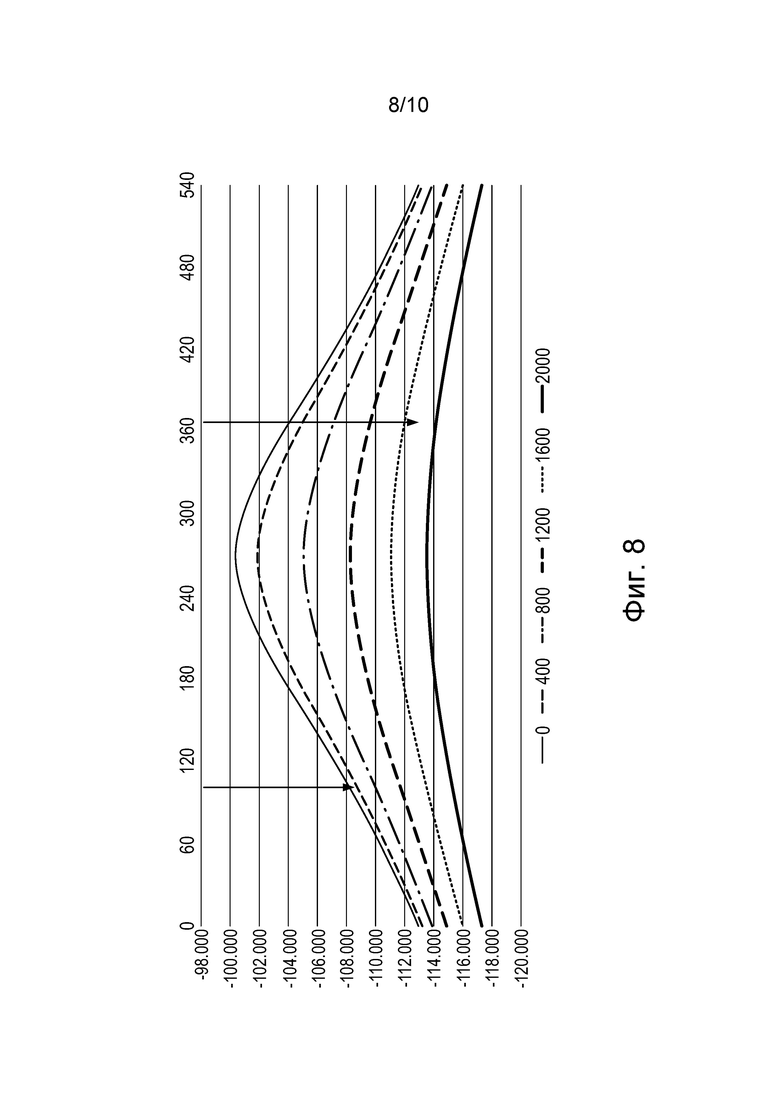
Поэтому на следующем этапе, показанном на фиг. 7, устройство UE вычисляет более точные значения положения Posn, m и, возможно, Posl, k, последнее с учетом уровня RSS не показано. Получив результаты измерений - 108 дБм и - 113 дБм для двух соответствующих спутников, устройство UE может с учетом оценки на основе доплеровской частоты произвести поиск по заранее известным данным для ожидаемого уровня RSS различных спутников на основе расстояния от устройства UE до плоскости орбиты и фазы периода прохода. В данном примере поиск согласно фиг. 8 может производиться по разным кривыми, представляющим ожидаемый уровень RSS на разных расстояниях от плоскости орбиты. Измеренные значения RSS совместно с оценками положения соответствующих спутников указывают на две кривые - одну для расстояния 400 км, а другую - для расстояния 1600-2000 км. В неоптимальном примере, когда результаты измерения получаются с отклонениям из-за ошибок измерения, устройство UE может использовать дополнительную информацию о своей географической широте, например, если общее расстояние между плоскостями двух соседних орбит известно и составляет, например 2000 км. В этом случае сумма расстояний от устройства UE до каждой из плоскостей двух соседних орбит должна составлять 2000 км, что позволяет исключить или уменьшить ошибки измерения.
Как показано на фиг. 7, при наличии данных об ожидаемых изменениях уровня RSS и доплеровской частоты, а также о геометрических характеристиках траектории спутника, устройство UE может оценить относительное положение спутника и использовать эту информацию для применения правильных параметров конфигурации, например как описано ранее в отношении конфигурации измерений устройства UE.
В другом варианте осуществления изобретения, не показанном на чертежах, но относящемся к аспектам, представленным на фиг. 1-7, устройство UE может получать от базовой станции конфигурацию измерений, которую устройство UE применяет для выполнения автономного выбора соты или повторного выбора соты. Обычно это происходит, когда устройство UE переходит в режим ожидания, например, после периода бездействия или нарушения связи. Устройство UE может получить общую конфигурацию измерений на основе одной или двух повторяющихся траекторий спутников на одной или двух орбитах, соответственно. Устройство UE также может располагать информацией, относящейся к периодичности цикла конфигурации измерений или, иными словами, ко временному интервалу между двумя спутниками на одной орбите и/или к сдвигу спутников на соседних орбитах. Устройство UE также может получать информацию о перемещении спутников с помощью других средств, помимо конфигурации измерений, например из системной информации, транслируемой спутником, из информации астрономического ежегодника, полученной с сервера и т.д.
Затем устройство UE может применять конфигурацию измерений или информацию на основе времени, т.е. устройство UE знает, что через каждые n секунд или минут на горизонте появляется следующий спутник на данной орбите, а спустя каждые k секунд или минут появляется спутник на соседней орбите. После этого устройство UE может соответствующим образом адаптировать свой автономный повторный выбор соты. Устройство UE может, например, измерять характеристики ресурсов (частоту) соседней соты (соседнего спутника) только тогда, когда известно, что она досягаема, т.е. если из информации о траектории или конфигурационной информации известно, что спутник находится вне досягаемости, его поиск не производится. С другой стороны, как только становится известно, что спутник может обеспечить более высокое качество обслуживания устройства UE, чем обслуживающий его в данный момент спутник, запускаются соответствующие измерения или частота таких измерений увеличивается.
Ниже приводится краткое изложение главных особенностей различных аспектов изобретения с возможными альтернативными вариантами.
Термин «настройка» означает получение устройством UE конфигурации от базовой станции.
В устройстве UE передача отчета об измерениях инициируется в зависимости от заранее известного перемещения базовой станции относительно устройства UE на основе:
- выполнения измерения устройством UE и сравнения результата с порогом, при котором порог изменяется во времени в соответствии с заранее известной функцией, с настройкой параметров или без нее, или с настройкой функции, или
- выполнения двух измерений устройством UE и сравнения результатов с использованием смещения, изменяющегося во времени в соответствии с заранее известной функцией, с настройкой параметров или без нее, или с настройкой функции, определяемой или параметризуемой как функция времени, как функция положения базовой станции относительно устройства UE или как функция одного или нескольких измерений, по существу представляющих положение базовой станции относительно устройства UE.
Эта функция может по существу соответствовать заранее известному изменению канала связи между устройством UE и базовой станцией, вызванному заранее известным перемещением базовой станции относительно устройства UE.
Эта функция может быть определена или параметризована как функция положения базовой станции относительно устройства UE, а формирование отчета об измерениях зависит от этой функции и от начального положения базовой станции относительно устройства UE, определяемого устройством UE или определяемого базовой станцией и сообщаемого устройству UE в конфигурационном сообщении.
Измерения могут быть основаны на измерениях по меньшей мере одного параметра канала связи между базовой станцией и устройством UE.
Базовая станция может быть частью спутника, а движение базовой станции относительно устройства UE представляет собой движение спутника по околоземной орбите над наземным устройством UE.
Базовая станция может содержать две части, при этом одна часть может быть реализована в наземной станции, а другая часть - в спутнике и движение базовой станции относительно устройства UE представляет собой движение спутника по околоземной орбите над наземным устройством UE.
Порог или смещение могут быть сконфигурированы на первое статическое значение в течение первого периода времени, а порог может быть сконфигурирован также на второе статическое значение в течение второго периода времени, следующего за первым периодом времени.
Порог или смещение могут быть сконфигурированы как непрерывная функция времени с изменяющимися значениями.
Порог или смещение могут быть сконфигурированы как непрерывная функция по меньшей мере одного измерения, выполняемого устройством UE, причем это по меньшей мере одно измерение по существу представляет положение базовой станции относительно устройства UE.
После хэндовера устройства UE ко второй базовой станции порог или смещение могут быть переустановлены на основе (неизменной) функции и начального положения второй базовой станции относительно устройства UE, определенного заново (в устройстве UE или в базовой станции с сообщением результата устройству UE).
В устройстве UE изменение применяемой конфигурации для выполнения измерений или отчетности об измерениях с первой конфигурации на вторую конфигурацию зависит от заранее известного перемещения базовой станции относительно устройства UE, при этом:
- первая и вторая конфигурации принимаются (от базовой станции) устройством UE до или во время применения первой конфигурации, а вторая конфигурация включает в себя по меньшей мере одно из следующего: измерение, отчет об измерении и триггер отчетности об измерениях, отсутствующее в первом отчете об измерениях (и наоборот), или
- первая конфигурация включает в себя измерение характеристик определенного ресурса (времени, частоты, сигнала, кода), а вторая конфигурация включает в себя измерение характеристик другого ресурса, или
- первая конфигурация включает в себя триггер отчетности об измерениях для передачи отчета об измерениях на основе первого измерения, а вторая конфигурация включает в себя триггер отчетности об измерениях для передачи отчета об измерениях на основе второго измерения, отличного от первого измерения, или
- первая конфигурация включает в себя конфигурацию периодической отчетности об измерениях с первой периодичностью, а вторая конфигурация включает в себя конфигурацию периодической отчетности об измерениях со второй периодичностью, отличной от первой периодичности.
Момент времени для изменения конфигурации, применяемой для выполнения измерений, может определяться как функция положения базовой станции относительно устройства UE или как функция одного или нескольких измерений, по существу представляющих положение базовой станции относительно устройства UE.
Это определение может выполняться в устройстве UE или в базовой станции с сообщением результата устройству UE в конфигурационном сообщении.
Момент времени изменения применяемой конфигурации измерений или отчетности об измерениях может быть основан на функции и начальном положении базовой станции относительно устройства UE, определяемом устройством UE на основе измерений или определяемом базовой станцией с сообщением результата устройству UE в конфигурационном сообщении.
Текущее положение может определяться на основе измерения по меньшей мере одного параметра канала связи между устройством UE и базовой станцией.
Базовая станция может быть частью спутника, а движение базовой станции относительно устройства UE представляет собой движение спутника по околоземной орбите над наземным устройством UE.
Базовая станция может содержать две части, при этом одна часть может быть реализована в наземной станции, а другая часть - в спутнике и движение базовой станции относительно устройства UE представляет собой движение спутника по околоземной орбите над наземным устройством UE.
После хэндовера устройства UE ко второй базовой станции в качестве применяемой конфигурации для измерений или отчетности об измерениях может быть установлена первая конфигурация, а момент времени для перехода с первой конфигурации на вторую конфигурацию определяется (заново) на основе измерения по меньшей мере одного параметра канала связи между устройством UE и второй базовой станцией.
Измерение по меньшей мере одного параметра канала связи между устройством UE и базовой станцией может включать в себя одно из следующего: измерение доплеровской частоты канала связи; разницу в двух или более измерениях доплеровской частоты канала связи в разные моменты времени; мощность принимаемого сигнала канала связи; разницу в двух или более измерениях мощности принимаемого сигнала канала связи в разные моменты времени; угол прихода сигнала, принимаемого по данному каналу связи; угол прихода первого сигнала, принимаемого по данному каналу связи, и второго сигнала, принимаемого по второму каналу связи между устройством UE и другой базовой станцией.
Тот же подход может быть применен к добавлению или к исключению дополнительной несущей для второго спутника, при этом существующая несущая для первого спутника по-прежнему выбирается на основе времени или измерений, как описано для вышеуказанных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОЦЕДУРА СМЕНЫ СОТЫ МОБИЛЬНОЙ СВЯЗИ | 2006 |
|
RU2388181C2 |
| АДАПТАЦИЯ ПОРОГА ИНИЦИИРОВАНИЯ ДЛЯ ИЗМЕРЕНИЙ ДЛЯ ПОВТОРНОГО ВЫБОРА СОТЫ | 2012 |
|
RU2606061C2 |
| УЗЕЛ И СПОСОБ ДЛЯ ОБЕСПЕЧЕНИЯ ОБСЛУЖИВАНИЯ БЕСПРОВОДНОГО ТЕРМИНАЛЬНОГО УСТРОЙСТВА МНОЖЕСТВОМ СОТ В КОММУНИКАЦИОННОЙ СЕТИ | 2013 |
|
RU2642831C1 |
| Способ и устройство для определения местоположения и устройство связи | 2020 |
|
RU2802247C1 |
| ПРЕДОСТАВЛЕНИЕ ОТЧЕТОВ, ХАРАКТЕРНЫХ ДЛЯ SFTD И ANR | 2019 |
|
RU2756897C1 |
| СПОСОБ УСТАНОВЛЕНИЯ СОЕДИНЕНИЯ В СИСТЕМЕ СВЯЗИ | 2019 |
|
RU2801310C2 |
| СПОСОБ КООРДИНАЦИИ НАСТРОЕК МОБИЛЬНОСТИ МЕЖДУ RAT | 2013 |
|
RU2600456C1 |
| СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ, УСТРОЙСТВО ТЕРМИНАЛА, УСТРОЙСТВО БАЗОВОЙ СТАНЦИИ И СПОСОБ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2524925C2 |
| ХЭНДОВЕР С АГРЕГАЦИЕЙ НЕСУЩИХ | 2011 |
|
RU2576385C2 |
| ХЭНДОВЕР В СЕТИ МЯГКИХ СОТ | 2013 |
|
RU2601551C1 |
Изобретение относится к беспроводной связи. Технический результат заключается в реализации режима измерений для устройства пользователя (UE) сотовой связи, оптимизированного для измерений в отношении спутниковых базовых станций или спутниковых приемопередающих станций, соединяющих устройства UE с наземными базовыми станциями. Устройство UE, подключенное к системе связи, отличной от наземной и содержащей множество точек передачи, инициирует передачу отчета об измерениях в зависимости от выполненного устройством UE измерения параметра сигнала, принятого из точки передачи системы, и сравнения измеренного параметра с порогом, значение которого изменяется в соответствии с заранее известной функцией в зависимости от ожидаемого положения устройства UE относительно точки передачи. 3 н. и 9 з.п. ф-лы, 10 ил.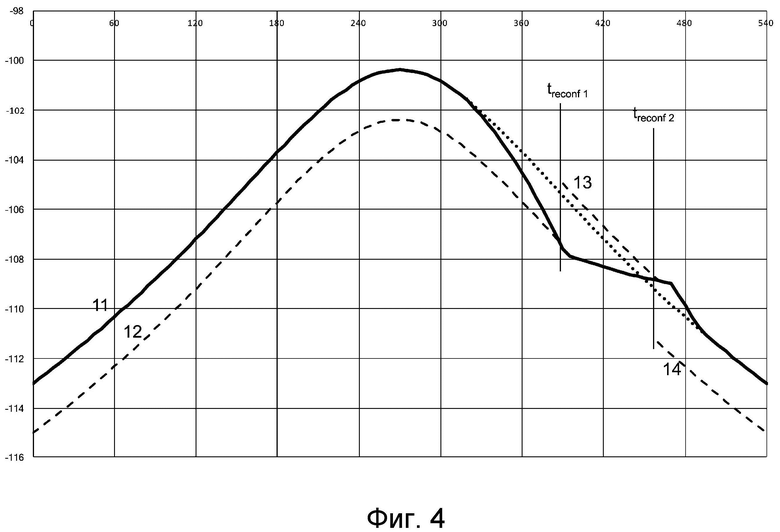
1. Способ работы устройства пользователя (UE), подключенного к системе связи, отличной от наземной и содержащей множество точек передачи, включающий в себя:
- инициирование устройством UE передачи отчета об измерениях в зависимости от измерения устройством UE параметра сигнала, принятого из точки передачи системы, и сравнения измеренного параметра с порогом, соответствующим заранее известной изменяющейся во времени функции, зависящей от ожидаемого положения устройства UE относительно точки передачи; и
- передачу отчета об измерениях.
2. Способ по п. 1, в котором порог адаптируется в соответствии с конфигурационной информацией, полученной от системы связи.
3. Способ по п. 1 или 2, в котором отчеты об измерениях отправляются для множества точек передачи с выполнением для каждой точки передачи сравнения параметра принятого из этой точки передачи сигнала с заранее известной изменяющейся во времени функцией для этой точки передачи.
4. Способ по любому из предшествующих пунктов, в котором измерения выполняются с заранее заданной периодичностью, изменяющейся со временем.
5. Способ по п. 4, в котором периодичность изменяется в зависимости от положения точки передачи относительно устройства UE.
6. Способ по п. 4, в котором периодичность изменяется в зависимости от положения второй точки передачи относительно устройства UE.
7. Устройство пользователя (UE), способное подключаться к системе спутниковой связи, способное формировать отчеты об измерениях и выполненное с возможностью сравнения уровня принимаемого сигнала с изменяющимся во времени пороговым значением для определения необходимости отправки отчета об измерениях, при этом изменяющееся во времени пороговое значение изменяется согласно заранее известной изменяющейся во времени функции в зависимости от ожидаемого изменения положения спутника системы спутниковой связи.
8. Устройство по п. 7, выполненное с возможностью приема от системы связи информации, указывающей период времени, в течение которого устройство UE должно выполнять сравнение уровня принимаемого сигнала от первого спутника и уровня принимаемого сигнала от второго спутника.
9. Устройство по п. 7 или 8, выполненное с возможностью приема от системы связи конфигурационной информации, указывающей устройству UE на то, какую отчетность об измерениях оно должно предоставлять.
10. Устройство по любому из пп. 7-9, выполненное с возможностью использования оценки положения устройства UE при определении текущего значения порогового значения для сравнения с уровнем принимаемого сигнала.
11. Устройство по п. 10, выполненное с возможностью определения оценки положения с использованием сигналов, принимаемых от спутников системы связи.
12. Способ управления хэндовером устройства пользователя (UE) от первой точки передачи ко второй точке передачи в системе связи, отличной от наземной, включающий в себя:
- сообщение устройству UE конфигурационной информации для предоставления отчетности об измерениях;
- указание устройству UE о предоставлении отчетности об измерениях путем сравнения результатов измерения параметров сигнала, принятого из первой точки передачи, с изменяющимся во времени порогом, который изменяется в соответствии с заранее известной изменяющейся во времени функцией в зависимости от зависящего от времени ожидаемого положения устройства UE относительно первой точки передачи;
- прием от устройства UE отчетов об измерениях в соответствии с конфигурационной информацией; и
- в случае определения на основе отчетов об измерениях полезности хэндовера от первой точки передачи ко второй точке передачи подача устройству UE команды о хэндовере.
| АДАПТАЦИЯ ПОРОГА ИНИЦИИРОВАНИЯ ДЛЯ ИЗМЕРЕНИЙ ДЛЯ ПОВТОРНОГО ВЫБОРА СОТЫ | 2012 |
|
RU2606061C2 |
| WO 2013115696 A1, 08.08.2013 | |||
| WO 2017189862 A1, 02.11.2017 | |||
| US 2016323032 A1, 03.11.2016. | |||

