ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, не ограничиваясь этим, к области техники беспроводной связи и, в частности, к способу и устройству для определения местоположения, устройству связи и носителю данных.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Наземная мобильная связь вступила в эру сотовой мобильной связи 5-го поколения (5G), а интеграция спутниковой связи и наземной мобильной связи 5G позволит создать наземно-космическую интегрированную сеть. Сценарии неназемной сети (NTN, Non-Terrestrial Networks) в сетях сотовой мобильной связи 5G включают 8 сценариев расширенной мобильной широкополосной связи (eMBB, enhanced mobile broadband) и 2 сценария массовой связи машинного типа (mMTC, massive machine type communication). С помощью спутникового покрытия большой зоны операторы могут предоставлять коммерческие услуги 5G в районах со слаборазвитой наземной сетевой инфраструктурой и обеспечивать непрерывность обслуживания 5G, особенно в таких сценариях, как связь в чрезвычайных ситуациях, морская связь, авиационная связь и связь вдоль железнодорожных путей.
[0003] В сценариях неназемной сети из-за быстрого изменения положения спутника относительно земли время непрерывного покрытия терминала одним и тем же спутником составляет лишь десять минут. Для низкоорбитальных спутников с несколькими лучами время непрерывного покрытия одним и тем же лучом составляет всего несколько минут. Следовательно, быстрое и точное переключение является проблемой, которую необходимо учитывать в сценариях неназемной сети.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Таким образом, настоящее изобретение обеспечивает способ и устройство для определения местоположения, устройство связи и носитель данных.
[0005] Согласно первому аспекту вариантов осуществления настоящего изобретения, предоставляется способ определения местоположения. Способ выполняется пользовательским оборудованием (UE, user equipment) и включает:
[0006] определение расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа.
[0007] В варианте осуществления изобретения способ также включает: прием информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа;
[0008] определение расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, включает:
[0009] определение расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[0010] В варианте осуществления изобретения определение расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования включает по меньшей мере одно из следующего:
[0011] определение расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и углом прихода беспроводного сигнала; и
[0012] определение расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и расстоянием между UE и оборудованием воздушной сети доступа.
[0013] В варианте осуществления изобретения расстояние между UE и оборудованием воздушной сети доступа определяют в соответствии со временем прохождения беспроводного сигнала.
[0014] В варианте осуществления изобретения способ также включает:
[0015] определение, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты.
[0016] В варианте осуществления изобретения определение, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты, включает одно из следующего:
[0017] выполнение перевыбора соты в ответ на определение того, что UE находится в состоянии ожидания и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния; и
[0018] передачу запроса хэндовера между сотами оборудованию воздушной сети доступа в ответ на определение того, что UE находится в состоянии соединения и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[0019] В варианте осуществления изобретения способ также включает:
[0020] прием информации указания, указывающей пороговое значение расстояния.
[0021] В варианте осуществления изобретения прием информации указания, указывающей пороговое значение расстояния, включает по меньшей мере одно из следующего:
[0022] прием информации указания, указывающей пороговое значение расстояния, широковещательно передаваемое оборудованием воздушной сети доступа; и
[0023] прием сигнализации управления радиоресурсами (RRC, radio resource control), передаваемой оборудованием воздушной сети доступа и несущей информацию указания, указывающую пороговое значение расстояния.
[0024] В варианте осуществления изобретения способ также включает:
[0025] передачу информации позиционирования UE в оборудование воздушной сети доступа, при этом оборудование воздушной сети доступа определяет местоположение UE в обслуживающей соте с помощью информации позиционирования UE.
[0026] Согласно второму аспекту вариантов осуществления настоящего изобретения, предоставляется способ определения местоположения. Способ применяется в оборудовании воздушной сети доступа и включает:
[0027] передачу информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа, при этом информация указания местоположения сконфигурирована для определения расположения UE относительно обслуживающей соты.
[0028] В варианте осуществления изобретения способ также включает:
[0029] прием от UE результата измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающую соту; при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа; и
[0030] определение расположения UE относительно обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[0031] В варианте осуществления изобретения результат измерения беспроводного сигнала включает: угол прихода беспроводного сигнала и/или время прохождения беспроводного сигнала.
[0032] В варианте осуществления изобретения способ также включает:
[0033] прием запроса хэндовера между сотами, при этом запрос хэндовера между сотами передают в ответ на определение того, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[0034] В варианте осуществления изобретения способ также включает:
[0035] передачу информации указания, указывающей пороговое значение расстояния.
[0036] В варианте осуществления изобретения передача информации указания, указывающей пороговое значение расстояния, включает по меньшей мере одно из следующего:
[0037] широковещательную передачу информации указания, указывающей пороговое значение расстояния; и
[0038] передачу сигнализации управления радиоресурсами (RRC), несущей информацию указания, указывающую пороговое значение расстояния.
[0039] В варианте осуществления изобретения способ также включает:
[0040] прием информации позиционирования UE; и
[0041] определение местоположения UE в обслуживающей соте в соответствии с центром обслуживающей соты и информацией позиционирования UE.
[0042] В варианте осуществления изобретения способ также включает:
[0043] выполнение хэндовера между сотами на UE в ответ на определение того, что местоположение UE в обслуживающей соте удовлетворяет условию хэндовера.
[0044] Согласно третьему аспекту вариантов осуществления настоящего изобретения, предоставляется устройство для определения местоположения. Устройство применяется в пользовательском оборудовании (UE) и содержит первый модуль определения,
[0045] при этом первый модуль определения сконфигурирован для определения расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа.
[0046] В одном варианте осуществления изобретения устройство также содержит:
[0047] первый модуль приема, сконфигурированный для приема информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа;
[0048] первый модуль определения содержит:
[0049] первый подмодуль определения, сконфигурированный для определения расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[0050] В варианте осуществления изобретения первый подмодуль определения содержит по меньшей мере одно из следующего:
[0051] первый блок определения, сконфигурированный для определения расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и углом прихода беспроводного сигнала; и
[0052] второй блок определения, сконфигурированный для определения расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и расстоянием между UE и оборудованием воздушной сети доступа.
[0053] В варианте осуществления изобретения расстояние между UE и оборудованием воздушной сети доступа определяется в соответствии со временем прохождения беспроводного сигнала.
[0054] В одном варианте осуществления изобретения устройство также содержит:
[0055] второй модуль определения, сконфигурированный для определения, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты.
[0056] В варианте осуществления изобретения второй модуль определения содержит одно из следующего:
[0057] подмодуль перевыбора, сконфигурированный для выполнения перевыбора соты в ответ на определение того, что UE находится в состоянии ожидания и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния; и
[0058] первый подмодуль передачи, сконфигурированный для передачи запроса хэндовера между сотами оборудованию воздушной сети доступа в ответ на определение того, что UE находится в состоянии соединения и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[0059] В одном варианте осуществления изобретения устройство также содержит:
[0060] второй модуль приема, сконфигурированный для приема информации указания, указывающей пороговое значение расстояния.
[0061] В варианте осуществления изобретения второй модуль приема содержит по меньшей мере одно из следующего:
[0062] первый подмодуль приема, сконфигурированный для приема информации указания, указывающей пороговое значение расстояния, широковещательно передаваемое оборудованием воздушной сети доступа; и
[0063] второй подмодуль приема, сконфигурированный для приема сигнализации управления радиоресурсами (RRC), передаваемой оборудованием воздушной сети доступа и несущей информацию указания, указывающую пороговое значение расстояния.
[0064] В одном варианте осуществления изобретения устройство также содержит:
[0065] первый модуль передачи, сконфигурированный для передачи информации позиционирования UE, при этом информация позиционирования сконфигурирована для определения, оборудованием воздушной сети доступа, местоположения UE в обслуживающей соте.
[0066] Согласно четвертому аспекту вариантов осуществления настоящего изобретения, предоставляется устройство для определения местоположения. Устройство применяется в оборудовании воздушной сети доступа и содержит второй модуль передачи,
[0067] при этом второй модуль передачи сконфигурирован для передачи информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа, при этом информация указания местоположения сконфигурирована для определения расположения UE относительно обслуживающей соты.
[0068] В одном варианте осуществления изобретения устройство также содержит:
[0069] третий модуль приема, сконфигурированный для приема от UE результата измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающую соту; при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа; и
[0070] третий модуль определения, сконфигурированный для определения расположения UE относительно обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[0071] В варианте осуществления изобретения результат измерения позиционирования беспроводного сигнала включает: угол прихода беспроводного сигнала и/или время прохождения беспроводного сигнала.
[0072] В одном варианте осуществления изобретения устройство также содержит:
[0073] четвертый модуль приема, сконфигурированный для приема запроса хэндовера между сотами, причем запрос хэндовера между сотами передается в ответ на определение того, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[0074] В одном варианте осуществления изобретения устройство также содержит:
[0075] третий модуль передачи, сконфигурированный для передачи информации указания, указывающей пороговое значение расстояния.
[0076] В варианте осуществления изобретения третий модуль передачи содержит:
[0077] второй подмодуль передачи, сконфигурированный для широковещательной передачи информации указания, указывающей пороговое значение расстояния; и/или
[0078] третий подмодуль передачи, сконфигурированный для передачи сигнализации управления радиоресурсами (RRC), несущей информацию указания, указывающую пороговое значение расстояния.
[0079] В одном варианте осуществления изобретения устройство также содержит:
[0080] пятый модуль приема, сконфигурированный для приема информации позиционирования UE; и
[0081] четвертый модуль определения, сконфигурированный для определения местоположения UE в обслуживающей соте в соответствии с центром обслуживающей соты и информацией позиционирования UE.
[0082] В одном варианте осуществления изобретения устройство также содержит:
[0083] модуль хэндовера, сконфигурированный для выполнения хэндовера между сотами на UE в ответ на определение того, что местоположение UE в обслуживающей соте удовлетворяет условию хэндовера.
[0084] В соответствии с пятым аспектом вариантов осуществления настоящего изобретения, предоставляется устройство связи, содержащее:
[0085] процессор;
[0086] память, соединенную с процессором и содержащую машиночитаемую программу для определения местоположения, при исполнении которой обеспечивается осуществление процессором этапов способа определения местоположения, как описано в первом аспекте или во втором аспекте.
[0087] В соответствии с шестым аспектом вариантов осуществления настоящего изобретения, предоставляется носитель данных, на котором хранится исполняемая программа. Когда исполняемая программа исполняется процессором, обеспечивается осуществление процессором этапов способа определения местоположения, как описано в первом аспекте или во втором аспекте.
[0088] Варианты осуществления настоящего изобретения обеспечивают способ и устройство для определения местоположения, устройство связи и носитель данных. UE определяет расположение UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа. Таким образом, для оборудования мобильной воздушной сети доступа, такого как базовые станции NTN, относительное расположение UE и оборудования воздушной сети доступа определяется путем измерения беспроводного сигнала обслуживающей соты, чтобы далее определить взаимное расположение UE и обслуживающей соты, при этом повышается точность определения местоположения в обслуживающей соте с помощью UE. Кроме того, можно точно определить, следует ли выполнять хэндовер между сотами, и уменьшить неточность определения времени хэндовера, используя мощность приема беспроводного сигнала и т.п.
[0089] Следует понимать, что приведенное выше общее описание и последующее подробное описание являются лишь иллюстративными и пояснительными и не ограничивают варианты осуществления настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0090] Чертежи включены в описание и составляют его часть, соответствуют вариантам осуществления изобретения и используются вместе с описанием для пояснения принципов вариантов осуществления изобретения.
[0091] Фиг. 1 представляет собой схему, показывающую структуру системы связи согласно варианту осуществления изобретения.
[0092] Фиг. 2 представляет собой схему, иллюстрирующую определение хэндовера соты соответствующей технологии согласно варианту осуществления изобретения.
[0093] Фиг. 3 представляет собой схему определения хэндовера соты другой родственной технологии, показанной согласно варианту осуществления изобретения.
[0094] Фиг. 4 представляет собой блок-схему, иллюстрирующую способ определения местоположения согласно варианту осуществления изобретения.
[0095] Фиг. 5 представляет собой схему, иллюстрирующую взаимное расположение согласно варианту осуществления изобретения.
[0096] Фиг. 6 представляет собой схему другого взаимного расположения, показанного в соответствии с вариантом осуществления изобретения.
[0097] Фиг. 7 представляет собой схему другого взаимного расположения, показанного в соответствии с вариантом осуществления изобретения.
[0098] Фиг. 8 представляет собой схему, иллюстрирующую другое определение местоположения нисходящей линии связи согласно варианту осуществления изобретения.
[0099] Фиг. 9 представляет собой структурную схему устройства для определения местоположения, показанного в соответствии с вариантом осуществления изобретения.
[00100] Фиг. 10 представляет собой структурную схему другого устройства для определения местоположения, показанного в соответствии с вариантом осуществления изобретения.
[00101] Фиг. 11 представляет собой структурную схему устройства для определения местоположения, показанного в соответствии с вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[00102] Теперь будут подробно описаны варианты осуществления изобретения, примеры которых проиллюстрированы на прилагаемых чертежах. Когда в последующем описании сделаны ссылки на прилагаемые чертежи, одни и те же позиции на разных чертежах относятся к одним и тем же или подобным элементам, если не указано иное. Реализации, описанные в следующих вариантах осуществления изобретения, не представляют всех реализаций, совместимых с вариантами осуществления настоящего изобретения. Скорее, они являются просто примерами устройств и способов, согласующихся с аспектами вариантов осуществления изобретения, как указано в прилагаемой формуле изобретения.
[00103] Термины, используемые в вариантах осуществления настоящего изобретения, предназначены только для описания конкретных вариантов осуществления изобретения и не предназначены для ограничения вариантов осуществления настоящего изобретения. При использовании в примерах настоящего изобретения и прилагаемой формуле изобретения, формы единственного числа также предназначены для включения форм множественного числа, если контекст явно не требует иного. Также следует понимать, что используемое здесь сочетание «и/или» относится к любым и всем возможным комбинациям одного или более связанных перечисленных элементов и включает их.
[00104] Следует понимать, что, хотя в вариантах осуществления настоящего изобретения могут использоваться термины «первый», «второй», «третий» и т.д. для описания различной информации, информация не должна ограничиваться этими терминами. Эти термины используются только для различения информации одного типа. Например, в пределах сущности вариантов осуществления настоящего изобретения, первая информация также может называться второй информацией, и аналогичным образом вторая информация также может называться первой информацией. В зависимости от контекста, слово «если», используемое здесь, может означать «при условии», «когда» или «в ответ на определение».
[00105] Рассмотрим фиг. 1, на которой показана структурная схема системы беспроводной связи, обеспечиваемой вариантом осуществления настоящего изобретения. Как показано на фиг. 1, система беспроводной связи представляет собой систему связи, основанную на технологии сотовой мобильной связи, причем система беспроводной связи может включать несколько терминалов 11 и несколько базовых станций 12.
[00106] Терминал 11 может быть устройством, которое обеспечивает возможность передачи голоса и/или данных пользователю. Терминал 11 может осуществлять связь с одной или более базовыми сетями через сеть радиодоступа (RAN, radio access network) и может быть терминалом Интернета вещей (1оТ), таким как сенсорное устройство, мобильный телефон (или называемый «сотовым» телефоном) и компьютер, имеющий терминал 1оТ, и может быть стационарным, портативным, карманным, ручным, встроенным компьютером или установленным на транспортном средстве устройством, таким как станция (STA), абонентское устройство, абонентская станция, мобильная станция, мобильное устройство, удаленная станция, точка доступа, удаленный терминал, терминал доступа, пользовательский терминал, пользовательский агент, пользовательское устройство и пользовательское оборудование (UE). В качестве альтернативы терминал 11 может быть устройством беспилотного летательного аппарата. В качестве альтернативы терминал 11 может представлять собой устройство, установленное на транспортном средстве, например маршрутный компьютер с функцией беспроводной связи или устройство беспроводной связи, подключенное к маршрутному компьютеру извне. Альтернативно, терминал 11 может быть придорожным устройством, таким как уличный фонарь, светофор или другие придорожные устройства с функцией беспроводной связи.
[00107] Базовая станция 12 может быть устройством на сетевой стороне в системе беспроводной связи. Система беспроводной связи может быть системой мобильной связи 4-го поколения (4G), также известной как система долгосрочного развития (LTE, long term evolution), или система беспроводной связи также может быть системой 5G, также известной как система новой радиосвязи (NR, new radio) или система 5G NR. Альтернативно, система беспроводной связи также может быть системой следующего поколения системы 5G, а сеть доступа в системе 5G может называться сетью радиодоступа нового поколения (NG-RAN, New Generation-Radio Access Network). Альтернативно, система беспроводной связи также может быть системой МТС.
[00108] Базовая станция 12 может быть усовершенствованным узлом В (eNB), принятым в системе 4G. В качестве альтернативы базовая станция 12 также может быть узлом В (gNB), использующим централизованную и распределенную архитектуру в системе 5G. Когда базовая станция 12 принимает централизованную и распределенную архитектуру, она обычно включает централизованный блок (CU, centralized unit) и по меньшей мере два распределенных блока (DU, distributed unit). Централизованный блок снабжен стеками протоколов уровня протокола конвергенции пакетных данных (PDCP, packet data convergence protocol), уровня управления линией радиосвязи (RLC, radio link control) и уровня управления доступом к среде (MAC, media access control), а распределенные блоки снабжены стеком протоколов физического уровня. Вариант осуществления настоящего изобретения не ограничивает конкретный способ реализации базовой станции 12.
[00109] Беспроводное соединение может быть установлено между базовой станцией 12 и терминалом 11 через беспроводной радиоинтерфейс. В различных вариантах осуществления изобретения беспроводной радиоинтерфейс может быть беспроводным радиоинтерфейсом на основе стандарта 4G, или беспроводной радио интерфейс может быть беспроводным радиоинтерфейсом на основе стандарта 5G, таким как новый радиоинтерфейс; альтернативно беспроводной радиоинтерфейс может быть беспроводным радиоинтерфейсом, основанным на техническом стандарте сети мобильной связи следующего поколения 5G.
[00110] В некоторых вариантах осуществления изобретения сквозное соединение также может быть установлено между терминалами 11, например, в сценариях связи транспортного средства с транспортным средством, связи транспортного средства с инфраструктурой и связи транспортного средства с пешеходом в рамках связи транспортного средства со всеми объектами.
[00111] В некоторых вариантах осуществления изобретения вышеуказанная система беспроводной связи может также включать устройство 13 управления сетью.
[00112] Несколько базовых станций 12 соответственно подключены к устройству 13 управления сетью. Устройство 13 управления сетью может быть устройством базовой сети в системе беспроводной связи. Например, устройство 13 управления сетью может быть объектом управления мобильностью (ММЕ, mobility management entity) в усовершенствованном пакетном ядре (ЕРС, evolved packet core). Альтернативно, устройство управления сетью может быть также другим устройством базовой сети, таким как обслуживающий шлюз (SGW, serving gateway), шлюз общедоступной сети передачи данных (PGW, public data network gateway), функциональный блок политик и правил тарификации (PCRF, policy and charging rules functional unit) или домашний абонентский сервер (HSS, home subscriber server). Реализация устройства 13 управления сетью не ограничивается вариантами осуществления настоящего изобретения.
[00113] Объекты, задействованные в вариантах осуществления настоящего изобретения, включают, не ограничиваясь этим: оборудование воздушной сети доступа, поддерживающее сотовую мобильную связь, например базовую станцию, и оборудование базовой сети.
[00114] Сценарий применения варианта осуществления настоящего изобретения заключается в том, что, как показано на фиг. 2, в системе наземной сети существует большая разница в уровне принимаемого сигнала, измеренного UE в центре соты и на краю соты, разница в уровне принимаемого сигнала может быть сконфигурирована для определения того, находится ли UE на краю соты, чтобы далее определить, следует ли перевыбрать соту или переключить соту.
[00115] Как показано на фиг. 3, в системах неназемной сети из-за большей дальности распространения высота расположения спутника на низкой околоземной орбите (LEO, low earth orbit) может достигать 300-1500 километров, а уровень принимаемого сигнала, измеренный терминалом UE, является практически одинаковым в центре и на краю соты. Если исходный механизм перевыбора соты 5G NR и механизм отчета об измерении RSRP/RSRQ применяются в системе неназемной сети, оконечному UE или базовой станции NTN (gNB) или наземному gNB будет сложно точно определить, находится ли оконечное UE на краю соты. В состоянии ожидания трудно точно определить, нужно ли инициировать измерение соседней соты для возможного перевыбора соты. В состоянии соединения gNB NTN или наземному gNB трудно точно определить, требуется ли инициировать процесс хэндовера соты.
[00116] Как показано на фиг. 4, вариант осуществления изобретения обеспечивает способ определения местоположения, который может применяться в UE при беспроводной связи. Способ определения местоположения может включать:
[00117] Этап 401: определение расположения UE относительно обслуживающей соты в соответствии с результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте; при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа.
[00118] UE может быть терминалом мобильного телефона и т.п., который использует технологию сети сотовой мобильной связи для беспроводной связи. Оборудованием воздушной сети доступа может быть базовая станция NTN сети сотовой мобильной связи, такая как спутник, или малая базовая станция, перевозимая на высотном воздушном шаре.
[00119] Результатом измерения может быть расположение UE относительно оборудования воздушной сети доступа, полученное UE на основе измерения сигнала передачи оборудования воздушной сети доступа в обслуживающей соте. Например, UE может измерять время прохождения (TOF, time of flight) сигнала передачи оборудования воздушной сети доступа, угол прихода и т.д. В зависимости от времени прохождения, может быть определено расстояние, проходимое сигналом между UE и сетью воздушного доступа, то есть расстояние между UE и оборудованием воздушной сети доступа.
[00120] Как показано на фиг. 3, поскольку покрытие сигнала базовой станции NTN является относительно фиксированным в пространстве, покрытие сигнала базовой станции NTN имеет форму конуса. UE может определить свое расположение относительно базовой станции NTN на основе результатов измерений, таких как время прохождения и угол прихода сигнала, для дальнейшего определения местоположения UE в обслуживающей соте.
[00121] Например, как показано на фиг. 5, базовая станция NTN передает беспроводные сигналы на землю в воздухе, чтобы сформировать обслуживающую соту UE на земле. Центром обслуживающей соты может быть точка вертикальной проекции базовой станции NTN на землю. В зоне покрытия сигнала в форме конуса угол между образующей конуса и основанием конуса равен β. Если угол прихода α беспроводного сигнала, принятого UE, больше или равен β, считается, что UE находится внутри обслуживающей соты. Если α меньше β, считается, что UE находится вне обслуживающей соты. Здесь угол β между образующей конуса и основанием конуса можно определить по лучу базовой станции NTN.
[00122] UE может измерять время прохождения сигнала, передаваемого базовой станцией NTN. Когда базовая станция NTN передает сигнал, сигнал может нести информацию о моменте времени передачи. UE может определять время прохождения сигнала на основе момента времени приема сигнала и момента времени передачи в сочетании со скоростью распространения сигнала. Как показано на фиг. 6, в зоне покрытия сигнала в форме конуса, образованной обслуживающей сотой, наибольшее время прохождения сигнала, передаваемого базовой станцией NTN, равно длине образующей конуса. Если расстояние, проходимое беспроводным сигналом, принятым UE, меньше или равно длине образующей конуса, то считается, что UE находится внутри обслуживающей соты, а если проходимое расстояние больше длины образующей конуса, то считается, что UE находится вне обслуживающей соты. Здесь длину образующей конуса можно определить по лучу базовой станции NTN.
[00123] Определенное взаимное расположение UE и обслуживающей соты может использоваться для определения необходимости переключения сот и т.д. Здесь переключение сот может включать: выполнение перевыбора соты в случае, когда UE находится в состоянии ожидания, или выполнение хэндовера между сотами в случае, когда UE находится в состоянии соединения.
[00124] Здесь длина образующей конуса и значение угла β могут быть заданы заранее, могут быть переданы в широковещательном режиме в UE с помощью оборудования воздушной сети доступа через системное сообщение или передано в UE посредством сигнализации RRC.
[00125] Таким образом, для оборудования мобильной воздушной сети доступа, такого как базовые станции NTN, относительное местоположение UE и оборудования воздушной сети доступа определяют путем измерения беспроводного сигнала обслуживающей соты, чтобы далее определить взаимное расположение UE и обслуживающей соты, при этом повышается точность определения местоположения UE в обслуживающей соте. Кроме того, можно точно определить, следует ли выполнять хэндовер между сотами, и уменьшить неточность в определении времени хэндовера, используя мощность приема беспроводного сигнала и т.п.
[00126] В одном варианте осуществления изобретения способ также включает: прием информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа;
[00127] определение расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, включает:
[00128] определение расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[00129] Информация указания местоположения может быть сконфигурирована для указания местоположения оборудования воздушной сети доступа, такого как базовая станция NTN, например, высоты расположения оборудования воздушной сети доступа. Здесь высота расположения оборудования воздушной сети доступа может быть расстоянием по вертикали от оборудования воздушной сети доступа до земли. Когда базовая станция NTN и т.п. указывает оборудованию воздушной сети доступа передавать сигналы на землю, передача обычно выполняется вертикально на землю, поэтому на земле формируется круговая зона покрытия сигнала. Центром круговой зоны покрытия сигнала является точка вертикальной проекции оборудования воздушной сети доступа, которая также является центром соты. Кроме того, даже если оборудование воздушной сети доступа не передает беспроводные сигналы вертикально на землю, угол, под которым оно передает беспроводные сигналы на землю, может быть фиксированным или периодически изменяться. Угол может сообщаться UE в режиме реального времени посредством сигнализации беспроводной связи или может быть известен заранее оборудованию воздушной сети доступа или UE (например, через протокол связи). Оборудование воздушной сети доступа или UE может получить местоположение центра обслуживающей соты, связанной с оборудованием воздушной сети доступа, в соответствии с углом и высотой расположения оборудования воздушной сети доступа, чтобы определить расстояние UE относительно центра обслуживающей соты.
[00130] Базовая станция NTN может передавать информацию указания местоположения на UE посредством широковещательного системного сообщения или сигнализации RRC, которая переносит информацию указания местоположения.
[00131] Базовая станция NTN может напрямую передавать информацию указания местоположения на UE, или наземная станция базовой станции NTN (то есть наземная базовая станция) может передавать информацию указания местоположения на UE через базовую станцию NTN.
[00132] UE устанавливает соединение связи с базовой станцией NTN в обслуживающей соте, и базовая станция NTN передает информацию указания на UE, чтобы указать высоту расположения базовой станции NTN над землей.
[00133] После того как UE определяет высоту расположения базовой станции NTN над землей, UE может определить расстояние от UE до центра обслуживающей соты в соответствии с результатами измерений, такими как время прохождения и угол прихода сигнала, с помощью теоремы Пифагора.
[00134] Таким образом, может осуществляться точное вычисление расстояния от UE до центра обслуживающей соты, и может быть повышена точность вычисления расстояния от UE до обслуживающей соты.
[00135] В одном варианте осуществления изобретения определение расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования включает по меньшей мере одно из следующего:
[00136] определение расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и углом прихода беспроводного сигнала; и
[00137] определение расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и расстоянием между UE и оборудованием воздушной сети доступа.
[00138] Как показано на фиг. 7, при условии, что известны высота расположения оборудования воздушной сети доступа и угол прихода беспроводного сигнала, передаваемого оборудованием воздушной сети доступа, расстояние между UE и центром обслуживающей соты может быть определено на основе тригонометрических функциональных соотношений и т.п.
[00139] Как показано на фиг. 6, UE может определять расстояние между UE и оборудованием воздушной сети доступа в соответствии со своей собственной информацией позиционирования и положением оборудования воздушной сети доступа, такого как спутники, полученными из таблицы эфемерид. Например, информацию позиционирования UE получают через спутниковые системы позиционирования, такие как глобальная система позиционирования (GPS, Global Positioning System) и навигационная спутниковая система (BDS, Navigation Satellite System) BeiDou, или с использованием приблизительного местоположения терминала, сообщенного базовой станцией или другим сетевым оборудованием. Зная высоту расположения оборудования воздушной сети доступа и расстояние передачи между оборудованием воздушной сети доступа и UE, расстояние между UE и центром обслуживающей соты можно определить на основе теоремы Пифагора.
[00140] Таким образом, может осуществляться точное вычисление расстояния от UE до центра обслуживающей соты, и может быть повышена точность вычисления расстояния от UE до обслуживающей соты.
[00141] В одном варианте осуществления изобретения расстояние между UE и оборудованием воздушной сети доступа определяют в соответствии со временем прохождения беспроводного сигнала.
[00142] UE может измерять время прохождения беспроводного сигнала, передаваемого оборудованием воздушной сети доступа. Оборудование воздушной сети доступа может нести информацию о времени передачи беспроводного сигнала в беспроводном сигнале, и UE определяет время прохождения беспроводного сигнала в соответствии со временем приема и временем передачи беспроводного сигнала. UE может определять дальность прохождения беспроводного сигнала в соответствии со временем прохождения беспроводного сигнала, то есть расстояние между UE и оборудованием воздушной сети доступа.
[00143] В одном варианте осуществления изобретения способ может включать:
[00144] в соответствии с расположением UE относительно обслуживающей соты, определение, следует ли выполнять измерение соседней соты, или определение частоты выполнения измерения соседней соты.
[00145] Например, когда определено, что UE расположено на определенном расстоянии от края обслуживающей соты на основе расположения UE относительно обслуживающей соты (например, расстояние между UE и краем соты меньше порогового значения), UE может быть сконфигурировано для выполнения измерения соседних сот, или UE может быть сконфигурировано для увеличения частоты измерений соседних сот. Поскольку UE находится дальше от края обслуживающей соты и ближе к центру обслуживающей соты, частота измерений соседних сот может постепенно уменьшаться, или, когда UE находится в пределах определенного диапазона от центра обслуживающей соты, измерение соседней соты не выполняется. Таким образом, достигается снижение энергопотребления терминала.
[00146] В одном варианте осуществления изобретения способ может включать:
[00147] определение, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты.
[00148] Здесь может быть определено, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты.
[00149] Например, как показано на фиг. 5, когда разность угла прихода α беспроводного сигнала и угла прихода β меньше порогового значения угла, определяют, что UE находится близко к краю обслуживающей соты, и может быть выполнен хэндовер между сотами.
[00150] Как показано на фиг. 6, если расстояние прохождения беспроводного сигнала, принятого UE, меньше длины образующей конуса, а разница между длиной образующей конуса и расстоянием прохождения беспроводного сигнала меньше заранее заданного порогового расстояния, определяют, что UE находится близко к краю обслуживающей соты, и может быть выполнен хэндовер между сотами.
[00151] Здесь пороговое значение угла и заранее заданное пороговое значение расстояния могут быть заданы заранее, могут быть широковещательно переданы на UE оборудованием воздушной сети доступа через системное сообщение или переданы на UE посредством сигнализации RRC.
[00152] Когда UE находится в состоянии соединения, если это необходимо для выполнения хэндовера между сотами, оно может передать запрос хэндовера между сотами на оборудование воздушной сети доступа, и оборудование воздушной сети доступа определяет, следует ли выполнять хэндовер между сотами.
[00153] Когда UE находится в состоянии ожидания, если определено, что UE находится близко к краю обслуживающей соты, может быть выполнен хэндовер между сотами, и UE может решить выполнить повторный выбор соты. Когда UE выполняет повторный выбор соты, оно может сначала выполнить измерение радиосигнала соседних сот, и UE может определить соседнюю соту, результат измерения радиосигнала которой удовлетворяет условию хэндовера между сотами, как новую обслуживающую соту для произвольного доступа.
[00154] В одном варианте осуществления изобретения определение, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты, включает одно из следующего:
[00155] выполнение перевыбора соты в ответ на определение того, что UE находится в состоянии ожидания и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния; и
[00156] передачу запроса хэндовера между сотами оборудованию воздушной сети доступа в ответ на определение того, что UE находится в состоянии соединения и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[00157] UE может определять расстояние между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и углом прихода беспроводного сигнала, передаваемого оборудованием воздушной сети доступа. Альтернативно, UE может определять расстояние между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и расстоянием между оборудованием воздушной сети доступа и UE.
[00158] Когда UE находится в состоянии ожидания, если UE определяет, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния, оно может определить, что UE находится близко к краю обслуживающей соты, и может быть выполнен хэндовер между сотами. В этом случае UE может решить выполнить повторный выбор соты. Когда UE выполняет повторный выбор соты, оно может сначала выполнить измерение радиосигнала соседних сот, и UE может определить соседнюю соту, результат измерения радиосигнала которой удовлетворяет условию хэндовера, как новую обслуживающую соту для произвольного доступа.
[00159] Когда UE находится в состоянии соединения, если UE определяет, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния, оно может определить, что UE находится близко к краю обслуживающей соты, и может быть выполнен хэндовер между сотами. UE может передать запрос хэндовера оборудованию воздушной сети доступа, и оборудование воздушной сети доступа может определить, выполнять ли хэндовер между сотами. Оборудование воздушной сети доступа может инициировать процесс хэндовера соты, предписывая UE выполнить измерение радиосигнала соседних сот. В соответствии с результатами измерения беспроводного сигнала соседних сот, которые сообщило UE, соседнюю соту, которая удовлетворяет условиям, выбирают в качестве новой обслуживающей соты для UE.
[00160] В одном варианте осуществления изобретения способ также включает:
[00161] прием информации указания, указывающей пороговое значение расстояния.
[00162] Базовая станция NTN может передать информацию указания, указывающую пороговое значение расстояния, на UE; наземная станция базовой станции NTN также может пересылать информацию указания, указывающую пороговое значение расстояния, на UE через базовую станцию NTN.
[00163] В одном варианте осуществления изобретения прием информации указания, указывающей пороговое значение расстояния, включает по меньшей мере одно из следующего:
[00164] прием информации указания, указывающей пороговое значение расстояния, широковещательно передаваемое оборудованием воздушной сети доступа; и
[00165] прием сигнализации управления радиоресурсами, передаваемой оборудованием воздушной сети доступа и несущей информацию указания, указывающую пороговое значение расстояния.
[00166] Оборудование воздушной сети доступа может использовать системное сообщение для переноса информации указания, указывающей пороговое значение расстояния, и передавать системное сообщение на UE. UE в состоянии ожидания или в состоянии соединения может принимать системное сообщение, содержащее информацию указания, указывающую пороговое значение расстояния, для определения порогового значения расстояния.
[00167] Оборудование воздушной сети доступа может использовать сигнализацию RRC для переноса информации указания, указывающей пороговое значение расстояния. UE в состоянии соединения может принимать сигнализацию RRC, содержащую информацию указания, указывающую пороговое значение расстояния, для определения порогового значения расстояния. Здесь сигнализация RRC может включать: сигнализацию конфигурации измерения RRC.
[00168] В одном варианте осуществления изобретения способ также включает:
[00169] передачу информации позиционирования UE, при этом информация позиционирования сконфигурирована для определения, оборудованием воздушной сети доступа, местоположения UE в обслуживающей соте.
[00170] Терминал UE может периодически сообщать информацию позиционирования оборудованию воздушной сети доступа, такому как базовая станция NTN, а базовая станция NTN и т.п. может определять информацию позиционирования, сообщаемую UE, как местоположение UE, и сравнивать ее с информацией о местоположении центра обслуживающей соты, чтобы определить, находится ли UE на краю обслуживающей соты. Если UE расположено на краю обслуживающей соты, может быть инициирован процесс хэндовера между сотами.
[00171] Настоящее изобретение также раскрывает способ измерения соседних сот, который может применяться в UE. Способ включает: определение UE своего расположения относительно обслуживающей соты, связанной с оборудованием воздушной сети доступа; в соответствии с расположением UE относительно обслуживающей соты определяют, следует ли выполнять измерение соседней соты, или определяют частоту измерения соседней соты. Например, когда определено, что UE расположено на определенном расстоянии от края обслуживающей соты в соответствии с расположением UE относительно обслуживающей соты (например, расстояние между UE и краем соты меньше порогового значения), UE может выполнять измерение соседней соты, или UE может увеличить частоту измерений соседних сот. Если UE находится дальше от края обслуживающей соты и ближе к центру обслуживающей соты, частота измерений соседних сот может постепенно уменьшаться, или, когда UE находится в пределах определенного диапазона от центра обслуживающей соты, измерение соседней соты не выполняется. Таким образом достигается снижение энергопотребления терминала.
[00172] Как показано на фиг. 8, этот вариант осуществления изобретения обеспечивает способ определения местоположения, который может применяться в оборудовании воздушной сети доступа для беспроводной связи. Способ может включать:
[00173] Этап 801: передача информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа, при этом информация указания местоположения сконфигурирована для определения расположения UE относительно обслуживающей соты.
[00174] UE может быть терминалом мобильного телефона и т.п., который использует технологию сотовой сети мобильной связи для беспроводной связи. Оборудованием воздушной сети доступа может быть базовая станция NTN сети сотовой мобильной связи, такая как спутник, или небольшая базовая станция, перевозимая на высотном воздушном шаре.
[00175] Результатом измерения может быть взаимное расположение UE и оборудования воздушной сети доступа, полученное UE на основе измерения сигнала передачи оборудования воздушной сети доступа в обслуживающей соте. Например, UE может измерять время прохождения (TOF, time of flight) сигнала передачи оборудования воздушной сети доступа, угол прихода и т.д.
[00176] Информация указания местоположения может быть сконфигурирована для указания положения оборудования воздушной сети доступа, такого как базовая станция NTN, например, высоты расположения оборудования воздушной сети доступа. Здесь высота расположения оборудования воздушной сети доступа может быть расстоянием по вертикали от оборудования воздушной сети доступа до земли. Когда базовая станция NTN и т.п. указывает оборудованию воздушной сети доступа передавать сигналы на землю, передача обычно выполняется вертикально на землю, поэтому на земле формируется круговая зона покрытия сигнала. Центром круговой зоны покрытия сигнала является точка вертикальной проекции оборудования воздушной сети доступа, которая также является центром соты.
[00177] Базовая станция NTN может передавать информацию указания местоположения на UE посредством широковещательного системного сообщения или сигнализации RRC, которая переносит информацию указания местоположения.
[00178] Базовая станция NTN может напрямую передавать информацию указания местоположения на UE, или наземная станция базовой станции NTN (то есть наземная базовая станция) может передавать информацию указания местоположения на UE через базовую станцию NTN.
[00179] UE устанавливает соединение связи с базовой станцией NTN в обслуживающей соте, и базовая станция NTN передает информацию указания на UE, чтобы указать высоту расположения базовой станции NTN над землей.
[00180] После того как UE определяет высоту расположения базовой станции NTN над землей, UE может определить расстояние от UE до центра обслуживающей соты в соответствии с результатами измерений, такими как время прохождения и угол прихода сигнала, с помощью теоремы Пифагора.
[00181] Например, как показано на фиг. 5, базовая станция NTN передает беспроводные сигналы на землю в воздухе, чтобы сформировать обслуживающую соту UE на земле. Центром обслуживающей соты может быть точка вертикальной проекции базовой станции NTN на землю. В зоне охвата сигнала в форме конуса угол между образующей конуса и основанием конуса равен β. Если угол прихода α беспроводного сигнала, принятого UE, больше или равен β, считается, что UE находится внутри обслуживающей соты. Если α меньше β, считается, что UE находится вне обслуживающей соты. Здесь угол β между образующей конуса и основанием конуса можно определить по лучу базовой станции NTN.
[00182] UE может измерять время прохождения сигнала, передаваемого базовой станцией NTN. Когда базовая станция NTN передает сигнал, сигнал может нести информацию о моменте времени передачи. UE может определять время прохождения сигнала на основе момента времени приема сигнала и момента времени передачи в сочетании со скоростью распространения сигнала. Как показано на фиг. 6, в зоне охвата сигнала в форме конуса, образованной обслуживающей сотой, наибольшее время прохождения сигнала, передаваемого базовой станцией NTN, равно длине образующей конуса. Если расстояние прохождения беспроводного сигнала, принятого UE, меньше или равно длине образующей конуса, то считается, что UE находится внутри обслуживающей соты, а если расстояние пролета больше длины образующей, то считается, что UE находится вне обслуживающей соты. Здесь длину образующей конуса можно определить по лучу базовой станции NTN.
[00183] Как показано на фиг. 7, при условии, что известны высота расположения оборудования воздушной сети доступа и угол прихода беспроводного сигнала, передаваемого оборудованием воздушной сети доступа, расстояние между UE и центром обслуживающей соты может быть определено на основе тригонометрических функциональных соотношений и т.п.
[00184] Как показано на фиг. 6, UE может определять расстояние между UE и оборудованием воздушной сети доступа в соответствии со своей собственной информацией позиционирования и положением оборудования воздушной сети доступа, такого как спутники, полученными из таблицы эфемерид. Зная высоту расположения оборудования воздушной сети доступа и расстояние передачи между оборудованием воздушной сети доступа и UE, расстояние между UE и центром обслуживающей соты можно определить на основе теоремы Пифагора.
[00185] Таким образом, может осуществляться точное вычисление расстояния от UE до центра обслуживающей соты, и может быть повышена точность вычисления расстояния от UE до обслуживающей соты.
[00186] В одном варианте осуществления изобретения способ также включает:
[00187] прием от UE результата измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающую соту; при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа; и
[00188] определение расположения UE относительно обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[00189] UE может передать результат измерения на базовую станцию, и базовая станция может определить местоположение UE в обслуживающей соте.
[00190] Оборудование воздушной сети доступа может определять расположение UE относительно оборудования воздушной сети доступа на основе результатов измерений, таких как время прохождения и угол прихода сигнала, а также высота расположения оборудования воздушной сети доступа, используя теорему Пифагора и т.д. Способ для оборудования воздушной сети доступа для определения расположения UE относительно оборудования воздушной сети доступа аналогичен способу определения UE своего расположения относительно оборудования воздушной сети доступа и здесь повторяться не будет.
[00191] Таким образом, может осуществляться точное вычисление расстояния от UE до центра обслуживающей соты, и может быть повышена точность вычисления расстояния от UE до обслуживающей соты.
[00192] В одном варианте осуществления изобретения результат измерения беспроводного сигнала включает: угол прихода беспроводного сигнала и/или время прохождения беспроводного сигнала.
[00193] В одном варианте осуществления изобретения результат измерения беспроводного сигнала включает: угол прихода беспроводного сигнала и/или время прохождения беспроводного сигнала.
[00194] Как показано на фиг. 7, при условии, что известны высота расположения оборудования воздушной сети доступа и угол прихода беспроводного сигнала, передаваемого оборудованием воздушной сети доступа, расстояние между UE и центром обслуживающей соты может быть определено на основе тригонометрических функциональных соотношений и т.п.
[00195] Как показано на фиг. 6, UE может определять расстояние по прямой линии (дальность пролета беспроводного сигнала) между UE и оборудованием воздушной сети доступа в соответствии со временем прохождения беспроводного сигнала, передаваемого оборудованием воздушной сети доступа. Зная высоту расположения оборудования воздушной сети доступа и расстояние передачи между оборудованием воздушной сети доступа и UE, расстояние между UE и центром обслуживающей соты можно определить на основе теоремы Пифагора.
[00196] Таким образом, может осуществляться точное вычисление расстояния от UE до центра обслуживающей соты, и может быть повышена точность вычисления расстояния от UE до обслуживающей соты.
[00197] В одном варианте осуществления изобретения способ может включать:
[00198] в соответствии с расположением UE относительно обслуживающей соты, определяют, следует ли указать UE выполнить измерение соседней соты или указать UE увеличить частоту выполнения измерения соседней соты.
[00199] Например, когда определено, что UE расположено на определенном расстоянии от края обслуживающей соты на основе расположения UE относительно обслуживающей соты (например, расстояние между UE и краем соты меньше порогового значения), UE может быть сконфигурировано для выполнения измерения соседних сот, или UE может быть сконфигурировано для увеличения частоты измерений соседних сот. Если UE находится дальше от края обслуживающей соты и ближе к центру обслуживающей соты, частота измерений соседней соты со стороны UE может постепенно уменьшаться, или, если UE находится в пределах определенного диапазона от центра обслуживающей соты, UE не выполняет никаких измерений соседней соты. Таким образом достигается снижение энергопотребления терминала.
[00200] В варианте осуществления изобретения оборудование воздушной сети доступа может использовать управляющую сигнализацию, такую как сигнализация RRC или сигнализация DCI, чтобы указать, выполняет ли UE измерение соседней соты, или для переноса информации, связанной с частотой выполнения UE измерения соседней соты. Например, информация может указывать конкретную частоту для выполнения UE измерения соседней соты, или указывать значение смещения, которое UE должно увеличивать или уменьшать по отношению к текущей частоте измерения соседней соты, или указывать UE увеличить или уменьшить частоту измерения соседней соты на определенный шаг.
[00201] В одном варианте осуществления изобретения способ может включать:
[00202] прием запроса хэндовера между сотами, при этом запрос хэндовера между сотами передают в ответ на определение того, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[00203] Когда UE находится в состоянии ожидания, если UE определяет, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния, оно может определить, что UE находится близко к краю обслуживающей соты, и может быть выполнен хэндовер между сотами. В этом случае UE может решить выполнить перевыбор соты. Когда UE выполняет перевыбор соты, оно может сначала выполнить измерение радиосигнала соседних сот, и UE может определить соседнюю соту, результат измерения радиосигнала которой удовлетворяет условию хэндовера, как новую обслуживающую соту для произвольного доступа.
[00204] В варианте осуществления изобретения способ также включает: передачу информации указания, указывающей пороговое значение расстояния.
[00205] Базовая станция NTN может передать информацию указания, указывающую пороговое значение расстояния, на UE; наземная станция базовой станции NTN также может пересылать информацию указания, указывающую пороговое значение расстояния, на UE через базовую станцию NTN.
[00206] В варианте осуществления изобретения передача информации указания, указывающей пороговое значение расстояния, включает по меньшей мере одно из следующего:
[00207] широковещательную передачу информации указания, указывающей пороговое значение расстояния; и
[00208] передачу сигнализации управления радиоресурсами (RRC), несущей информацию указания, указывающую пороговое значение расстояния.
[00209] Оборудование воздушной сети доступа может использовать системное сообщение для переноса информации указания, указывающей пороговое значение расстояния, и широковещательно передавать системное сообщение на UE. UE в состоянии ожидания или в состоянии соединения может принимать системное сообщение, содержащее информацию указания, указывающую пороговое значение расстояния, для определения порогового значения расстояния.
[00210] Оборудование воздушной сети доступа может использовать сигнализацию RRC для переноса информации указания, указывающей пороговое значение расстояния. UE в состоянии соединения может принимать сигнализацию RRC, содержащую информацию указания, указывающую пороговое значение расстояния, для определения порогового значения расстояния. Здесь сигнализация RRC может включать: сигнализацию конфигурации измерения RRC.
[00211] В одном варианте осуществления изобретения способ также включает:
[00212] прием информации позиционирования UE; и
[00213] определение местоположения UE в обслуживающей соте в соответствии с центром обслуживающей соты и информацией позиционирования UE.
[00214] Терминал UE может периодически сообщать информацию позиционирования оборудованию воздушной сети доступа, такому как базовая станция NTN, а базовая станция NTN и т.п. может определять информацию позиционирования, сообщаемую UE, как местоположение UE, и сравнивать ее с информацией о местоположении центра обслуживающей соты, чтобы определить, находится ли UE на краю обслуживающей соты. Если UE расположено на краю обслуживающей соты, может быть инициирован процесс хэндовера между сотами.
[00215] В одном варианте осуществления изобретения способ также включает:
[00216] выполнение хэндовера между сотами на UE в ответ на определение того, что местоположение UE в обслуживающей соте удовлетворяет условию хэндовера.
[00217] Когда оборудование воздушной сети доступа определяет, что UE расположено на краю обслуживающей соты, оборудование воздушной сети доступа может инициировать процедуру хэндовера соты и инструктировать UE выполнить измерение радиосигнала соседних сот. На основе результатов измерения беспроводного сигнала соседних сот, сообщенных UE, соседнюю соту, которая удовлетворяет условиям, выбирают в качестве новой обслуживающей соты для UE.
[00218] Настоящее изобретение также раскрывает способ измерения соседних сот, который может применяться в оборудовании воздушной сети доступа. Способ включает: определение, оборудованием воздушной сети доступа, расположения UE относительно обслуживающей соты, связанной с оборудованием воздушной сети доступа; в соответствии с расположением UE относительно обслуживающей соты определяют, следует ли выполнять измерение соседней соты, или определяют частоту измерения соседней соты. Например, когда определено, что UE расположено на определенном расстоянии от края обслуживающей соты в соответствии с расположением UE относительно обслуживающей соты (например, расстояние между UE и краем соты меньше порогового значения), UE может быть сконфигурировано для выполнения измерения соседних сот, или UE может быть сконфигурировано для увеличения частоты измерений соседних сот. Если UE находится дальше от края обслуживающей соты и ближе к центру обслуживающей соты, частота измерений соседних сот может постепенно уменьшаться, или, если UE находится в пределах определенного диапазона от центра обслуживающей соты, измерение соседней соты не выполняется. Таким образом достигается снижение энергопотребления терминала.
[00219] В варианте осуществления изобретения оборудование воздушной сети доступа может использовать управляющую сигнализацию, такую как сигнализация RRC или сигнализация DCI, для указания, выполняет ли UE измерение соседней соты, или для переноса информации, связанной с частотой выполнения UE измерения соседней соты. Например, информация может указывать конкретную частоту для UE, чтобы выполнить измерение соседней соты, или указывать значение смещения, которое UE должно увеличивать или уменьшать по отношению к текущей частоте измерения соседней соты, или указывать UE увеличить или уменьшить частоту измерения соседней соты на определенный шаг.
[00220] Ниже представлен конкретный пример в сочетании с любым из описанных выше вариантов осуществления изобретения:
[00221] Механизм определения границ сот NTN следующий:
[00222] 1: В сценарии, когда луч перемещается вместе со спутником, спутник передает информацию о высоте расположения спутника в зону покрытия и принимает центр соты в качестве опорной точки для терминала UE;
[00223] 2: Терминал UE может вычислить расстояние между терминалом UE и опорной точкой центра соты с помощью информации о местоположении в реальном времени в эфемеридах, информации о высоте расположения спутника и информации об угле прихода и приема опорного сигнала, полученного терминал UE, как показано на фиг. 2;
[00224] 3: В состоянии соединения gNB NTN или наземный gNB конфигурируют пороговое значение местоположения для определения границы соты для UE посредством сигнализации конфигурации измерения RRC. Существуют следующие способы определения того, находится ли терминал UE на краю соты:
[00225] Способ периодических отчетов: оконечное UE периодически сообщает информацию о местоположении в gNB NTN или наземный gNB, a gNB NTN или наземный gNB сравнивает сообщаемую информацию о местоположении с информацией о местоположении центра соты, чтобы определить, находится ли UE на краю соты;
[00226] Способ сообщения, инициируемый событием: когда разность расстояний между UE и опорной точкой местоположения в центре соты превышает пороговое значение местоположения, определяют, что UE находится на краю соты, и оконечное UE сообщает информацию указания края соты.
[00227] 4: В состоянии ожидания gNB NTN или наземный gNB конфигурируют пороговое значение местоположения для определения границы соты для UE посредством широковещательной сигнализации или сигнализации конфигурации измерения RRC. Когда разность расстояний между UE и опорной точкой местоположения в центре соты больше, чем пороговое значение местоположения, определяют, что UE находится на краю соты, и инициируют измерение соседних сот;
[00228] В состоянии ожидания оценивают, находится ли UE в области края соты или в центральной области соты, путем установки различных пороговых значений местоположения. Когда терминал UE считается находящимся в области края соты, UE инициирует измерения соседних сот. Когда считается, что терминал UE находится в центральной области соты, терминал UE может не выполнять измерения для соседних сот для снижения энергопотребления, как показано на фиг. 3.
[00229] Вариант осуществления настоящего изобретения также предоставляет устройство для определения местоположения, которое применяется в первом узле беспроводной связи. Фиг. 9 представляет собой структурную схему устройства 100 для определения местоположения, предусмотренного вариантом осуществления настоящего изобретения. Как показано на фиг. 9, устройство 100 содержит первый модуль 110 определения,
[00230] при этом первый модуль 110 определения сконфигурирован для определения расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа.
[00231] В одном варианте осуществления изобретения устройство 100 также содержит:
[00232] первый модуль 120 приема, сконфигурированный для приема информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа;
[00233] первый модуль 110 определения включает:
[00234] первый подмодуль 111 определения, сконфигурированный для определения расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[00235] В одном варианте осуществления изобретения первый подмодуль 111 определения содержит:
[00236] первый блок 1111 определения, сконфигурированный для определения расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и углом прихода беспроводного сигнала; и/или
[00237] второй блок 1112 определения, сконфигурированный для определения расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и расстоянием между UE и оборудованием воздушной сети доступа.
[00238] В одном варианте осуществления изобретения расстояние между UE и оборудованием воздушной сети доступа определяется в соответствии со временем прохождения беспроводного сигнала.
[00239] В одном варианте осуществления изобретения устройство 100 также содержит:
[00240] второй модуль 130 определения, сконфигурированный для определения, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты.
[00241] В одном варианте осуществления изобретения второй модуль 130 определения содержит одно из следующего:
[00242] подмодуль 131 перевыбора, сконфигурированный для выполнения перевыбора соты в ответ на определение того, что UE находится в состоянии ожидания и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния; и
[00243] первый подмодуль 132 передачи, сконфигурированный для передачи запроса хэндовера между сотами в оборудование воздушной сети доступа в ответ на определение того, что UE находится в состоянии соединения и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[00244] В одном варианте осуществления изобретения устройство 100 также содержит:
[00245] второй модуль 140 приема, сконфигурированный для приема информации указания, указывающей пороговое значение расстояния.
[00246] В одном варианте осуществления изобретения второй модуль 140 приема содержит:
[00247] первый подмодуль 141 приема, сконфигурированный для приема информации указания, указывающей пороговое значение расстояния, широковещательно передаваемое оборудованием воздушной сети доступа; и/или
[00248] второй подмодуль 142 приема, сконфигурированный для приема сигнализации управления радиоресурсами, передаваемой оборудованием воздушной сети доступа и несущей информацию указания, указывающую пороговое значение расстояния.
[00249] В одном варианте осуществления изобретения устройство 100 также содержит:
[00250] первый модуль 150 передачи, сконфигурированный для передачи информации позиционирования UE, при этом информация позиционирования сконфигурирована для определения, оборудованием воздушной сети доступа, местоположения UE в обслуживающей соте.
[00251] Вариант осуществления настоящего изобретения также предоставляет устройство для определения местоположения, которое применяется в оборудовании воздушной сети доступа беспроводной связи. Фиг. 10 представляет собой структурную схему устройства 200 для определения местоположения, предусмотренного вариантом осуществления настоящего изобретения. Как показано на фиг. 10, устройство 200 содержит второй модуль 210 передачи,
[00252] при этом второй модуль 210 передачи сконфигурирован для передачи информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа, при этом информация указания местоположения сконфигурирована для определения расположения UE относительно обслуживающей соты.
[00253] В одном варианте осуществления изобретения устройство 200 также содержит:
[00254] третий модуль 220 приема, сконфигурированный для приема от UE результата измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающую соту; при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа; и
[00255] третий модуль 230 определения, сконфигурированный для определения расположения UE относительно обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
[00256] В одном варианте осуществления изобретения результат измерения позиционирования беспроводного сигнала включает: угол прихода беспроводного сигнала и/или время прохождения беспроводного сигнала.
[00257] В одном варианте осуществления изобретения устройство 200 также содержит:
[00258] четвертый модуль 240 приема, сконфигурированный для приема запроса хэндовера между сотами, причем запрос хэндовера между сотами передается в ответ на определение того, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
[00259] В одном варианте осуществления изобретения устройство 200 также содержит:
[00260] третий модуль 250 передачи, сконфигурированный для передачи информации указания, указывающей пороговое значение расстояния.
[00261] В одном варианте осуществления изобретения третий модуль 250 передачи содержит:
[00262] второй подмодуль 251 передачи, сконфигурированный для широковещательной передачи информации указания, указывающей пороговое значение расстояния; и/или
[00263] третий подмодуль 252 передачи, сконфигурированный для передачи сигнализации управления радиоресурсами (RRC), несущей информацию указания, указывающую пороговое значение расстояния.
[00264] В одном варианте осуществления изобретения устройство 200 также содержит:
[00265] пятый модуль 260 приема, сконфигурированный для приема информации позиционирования UE; и
[00266] четвертый модуль 270 определения, сконфигурированный для определения местоположения UE в обслуживающей соте в соответствии с центром обслуживающей соты и информацией позиционирования UE.
[00267] В одном варианте осуществления изобретения устройство 200 также содержит:
[00268] модуль 280 хэндовера, сконфигурированный для выполнения хэндовера между сотами на UE в ответ на определение того, что местоположение UE в обслуживающей соте удовлетворяет условию хэндовера.
[00269] В варианте осуществления изобретения первый модуль ПО определения, первый модуль 120 приема, второй модуль 130 определения, второй модуль 140 приема, первый модуль 150 передачи, второй модуль 210 передачи, третий модуль 220 приема, третий модуль 230 определения, четвертый модуль 240 приема, третий модуль 250 передачи, пятый модуль 260 приема, четвертый модуль 270 определения и модуль 280 хэндовера и т.д. могут быть реализованы одним или более центральными процессорами (CPU, central processing unit), графическими процессорами (GPU, graphics processing unit), процессорами основной полосы частот (BP, baseband processor), специализированными интегральными схемами (ASIC, application-specific integrated circuit), DSP, программируемыми логическими устройствами (PLD, programmable logic device), сложными программируемыми логическими устройствами (CPLD, complex programmable logic device), программируемыми пользователем вентильными матрицами (FPGA, Field Programmable Gate Array), общими процессорами, контроллерами, микроконтроллерами (MCU, Microcontroller unit), микропроцессорами или другими электронными компонентами для выполнения описанного выше способа.
[00270] Фиг. 11 представляет собой структурную схему устройства 3000 для определения местоположения, показанного в соответствии с вариантом осуществления изобретения. Например, устройство 3000 может быть мобильным телефоном, компьютером, терминалом цифрового вещания, устройством обмена сообщениями, игровой консолью, планшетным устройством, медицинским устройством, фитнес-устройством, персональным цифровым помощником и т.п.
[00271] Как показано на фиг. 11, устройство 3000 может включать один или более из следующих компонентов: компонент 3002 обработки, память 3004, компонент 3006 питания, мультимедийный компонент 3008, аудиокомпонент ЗОЮ, интерфейс 3012 ввода/вывода (I/O), компонент 3014 датчиков и компонент 3016 связи.
[00272] Компонент 3002 обработки обычно управляет всеми операциями устройства 3000, такими как операции, связанные с отображением, телефонными вызовами, передачей информации, операциями камеры и операциями записи. Компонент 3002 обработки может включать один или более процессоров 3020 для выполнения инструкций для осуществления всех или части этапов описанного выше способа. Кроме того, компонент 3002 обработки может включать один или более модулей, которые обеспечивают взаимодействие между компонентом 3002 обработки и другими компонентами. Например, компонент 3002 обработки может включать мультимедийный модуль для обеспечения взаимодействия между мультимедийным компонентом 3008 и компонентом 3002 обработки.
[00273] Память 3004 сконфигурирована для хранения различных типов данных для поддержки операций на устройстве 3000. Примеры таких данных включают инструкции для любого приложения или способа, работающего на устройстве 3000, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.п. Память 3004 может быть реализована любым типом энергозависимого или энергонезависимого запоминающего устройства, такого как статическая оперативная память (SRAM, static random access memory), электрически стираемая программируемая постоянная память (EEPROM, electrically erasable programmable read-only memory), стираемая программируемая постоянная память (EPROM, erasable programmable read only memory), программируемая постоянная память (PROM, programmable read only memory), постоянная память (ROM, read only memory), магнитная память, флэш-память, магнитный или оптический диск, или их комбинация. Компонент 3006 питания обеспечивает питание различных компонентов устройства 3000.
[00274] Компонент 3006 питания может включать систему управления питанием, один или более источников питания и другие компоненты, связанные с генерированием, управлением и распределением питания в устройстве 3000.
[00275] Мультимедийный компонент 3008 включает экран, который обеспечивает выходной интерфейс между устройством 3000 и пользователем. В некоторых вариантах осуществления изобретения экран может включать жидкокристаллический дисплей (LCD, liquid crystal display) и сенсорную панель (TP, touch panel). Если экран включает сенсорную панель, экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель включает один или более сенсорных датчиков для распознавания касаний, скольжений и жестов на сенсорной панели. Сенсорный датчик может не только определять границу касания или скольжения, но также определять продолжительность и давление, связанные с операцией касания или скольжения. В некоторых вариантах осуществления изобретения мультимедийный компонент 3008 включает переднюю камеру и/или заднюю камеру. Когда устройство 3000 находится в рабочем режиме, таком как режим фотосъемки или видеосъемки, передняя камера и/или задняя камера могут получать внешние мультимедийные данные. Как передняя, так и задняя камера может представлять собой систему с фиксированными линзами или иметь возможность фокусировки и оптического увеличения.
[00276] Аудиокомпонент 3010 выполнен с возможностью вывода и/или ввода аудиосигналов. Например, аудиокомпонент 3010 включает микрофон (MIC), который сконфигурирован для приема внешних аудиосигналов, когда устройство 3000 находится в режимах работы, таких как режим вызова, режим записи и режим распознавания голоса. Принятые аудиосигналы могут быть далее сохранены в памяти 3004 или переданы через компонент 3016 связи. В некоторых вариантах осуществления изобретения аудиокомпонент 3010 также включает динамик для вывода аудиосигналов.
[00277] Интерфейс 3012 ввода/вывода обеспечивает интерфейс между компонентом 3002 обработки и модулем периферийного интерфейса, который может представлять собой клавиатуру, колесико управления, кнопку и т.п. Эти кнопки могут включать, не ограничиваясь этим: кнопку «Домой», кнопку регулировки громкости, кнопку «Пуск» и кнопку блокировки.
[00278] Компонент 3014 датчиков включает один или более датчиков для обеспечения оценки состояния различных аспектов устройства 3000. Например, компонент 3014 датчиков может определять открытое/закрытое состояние устройства 3000, относительное расположение компонентов, таких как дисплей и клавиатура устройства 3000, компонент 3014 датчиков также может обнаруживать изменение положения устройства 3000 или компонента устройства 3000, присутствие или отсутствие контакта пользователя с устройством 3000, ориентацию устройства 3000 или ускорение/замедление и изменение температуры устройства 3000. Компонент 3014 датчиков может включать датчик приближения, сконфигурированный для обнаружения присутствия близлежащих объектов без физического контакта с ними. Компонент 3014 датчиков может также включать оптический датчик, такой как датчик изображения CMOS или CCD, для использования в приложениях обработки изображений. В некоторых вариантах осуществления изобретения компонент 3014 датчиков может также включать датчик ускорения, датчик гироскопа, магнитный датчик, датчик давления или датчик температуры.
[00279] Компонент 3016 связи выполнен с возможностью обеспечения проводной или беспроводной связи между устройством 3000 и другими устройствами. Устройство 3000 может осуществлять доступ к беспроводным сетям на основе стандартов связи, таких как Wi-Fi, 2G или 3G, или их комбинации. В варианте осуществления изобретения компонент 3016 связи принимает широковещательные сигналы или информацию, связанную с широковещательной передачей, от внешней системы управления широковещательной передачей через широковещательный канал. В варианте осуществления изобретения компонент 3016 связи также включает модуль беспроводной связи ближнего радиуса действия (NFC, near field communication) для обеспечения связи ближнего действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID, Radio Frequency Identification), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA, Infrared Data Association), технологии сверхширокополосной связи (UWB, Ultra Wide Band), технологии Bluetooth (ВТ) и других технологий.
[00280] В варианте осуществления изобретения устройство 3000 может быть запрограммировано с помощью одной или более специализированных интегральных схем (ASIC, application specific integrated circuit), процессоров цифровых сигналов (DSP, digital signal processor), устройств цифровой обработки сигналов (DSPD, digital signal processing device), программируемых логических устройств (PLD, programmable logic device), программируемых пользователем вентильных матриц (FPGA, field programmable gate array), контроллеров, микроконтроллеров, микропроцессоров или другой реализации электронного компонента для выполнения способов, описанных выше.
[00281] В варианте осуществления изобретения также предоставляется машиночитаемый носитель для хранения данных, содержащий инструкции, например память 3004, содержащая инструкции, которые могут выполняться процессором 3020 устройства 3000 для осуществления описанного выше способа. Например, машиночитаемый носитель для хранения данных может быть ROM, оперативной памятью (RAM, random access memory), CD-ROM, магнитной лентой, гибким диском, оптическим устройством хранения данных и т.п.
[00282] Другие реализации вариантов осуществления изобретения будут очевидны для специалистов в данной области техники из рассмотрения описания и практического применения изобретения, раскрытого в данном документе. Эта заявка предназначена для охвата любых модификаций, вариантов использования или адаптаций вариантов осуществления настоящего изобретения, если эти модификации, варианты использования или адаптации следуют общим принципам вариантов осуществления настоящего изобретения и включают принципы в данной области техники, которые не раскрыты вариантами осуществления настоящего изобретения и представляют общие знания или известные технические средства. Описание и примеры следует рассматривать только как иллюстративные, при этом объем и сущность вариантов осуществления изобретения определяются следующей формулой изобретения.
[00283] Следует понимать, что варианты осуществления настоящего изобретения не ограничиваются точными конструкциями, описанными выше и показанными на чертежах, и могут быть внесены различные модификации и изменения в пределах сущности изобретения. Объем вариантов осуществления настоящего изобретения определяется только прилагаемой формулой изобретения.
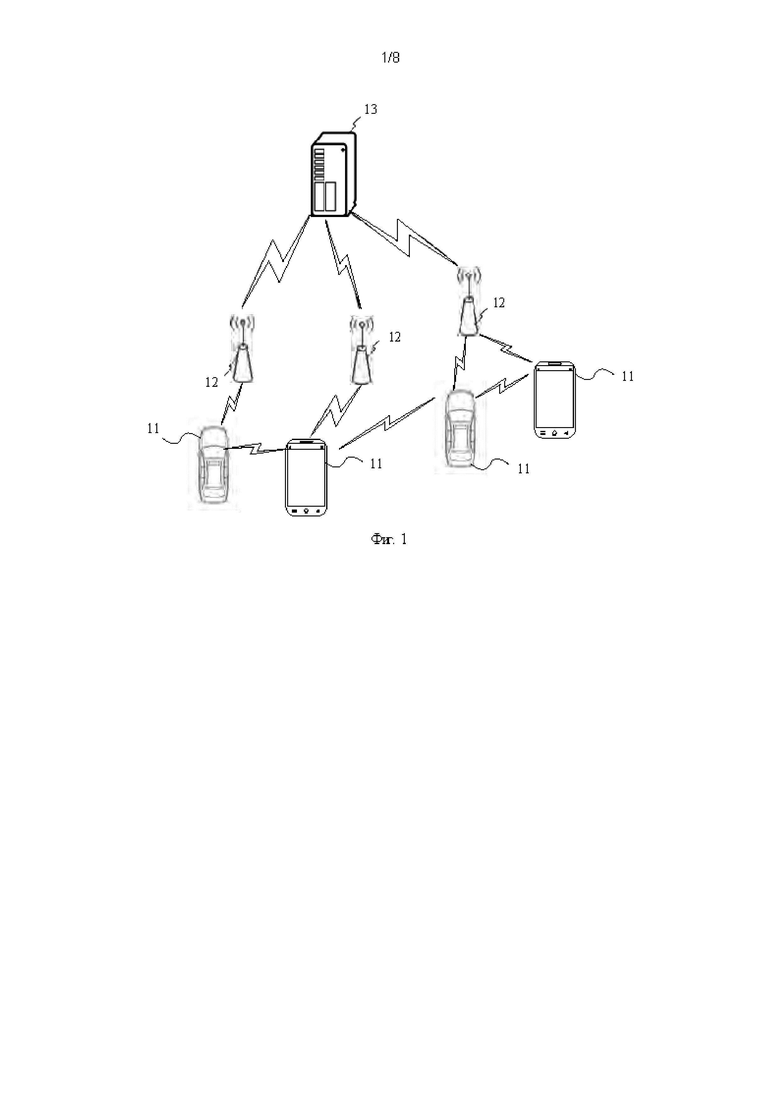
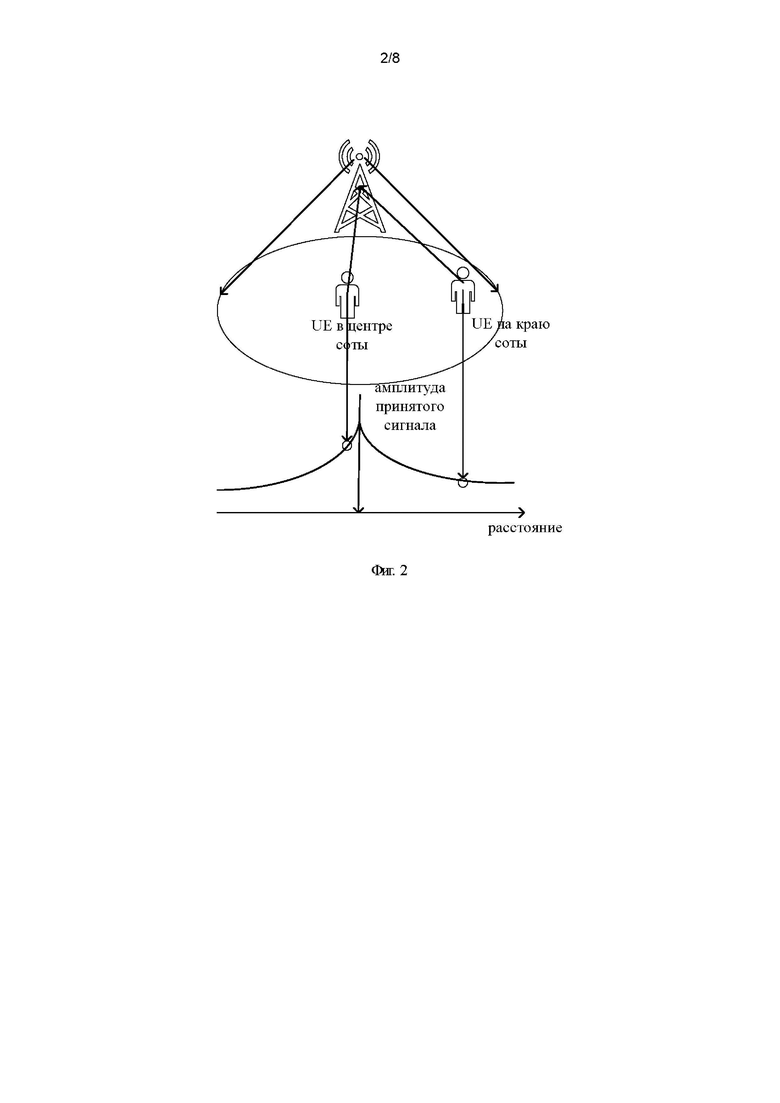

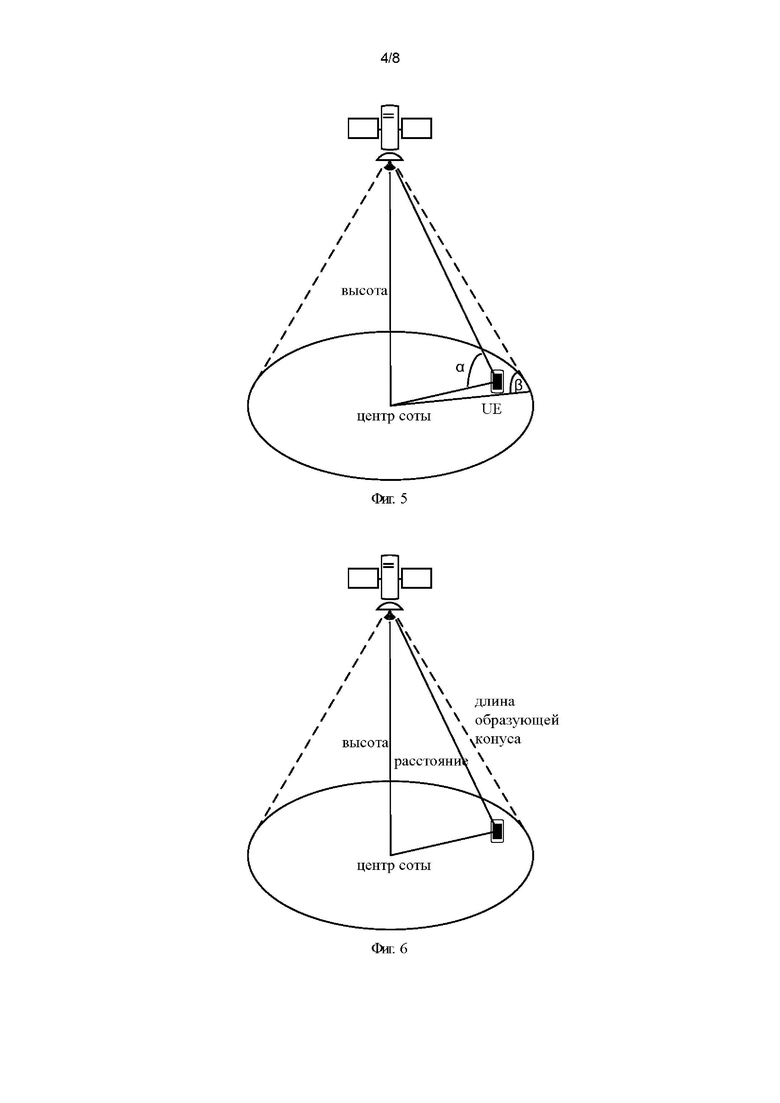
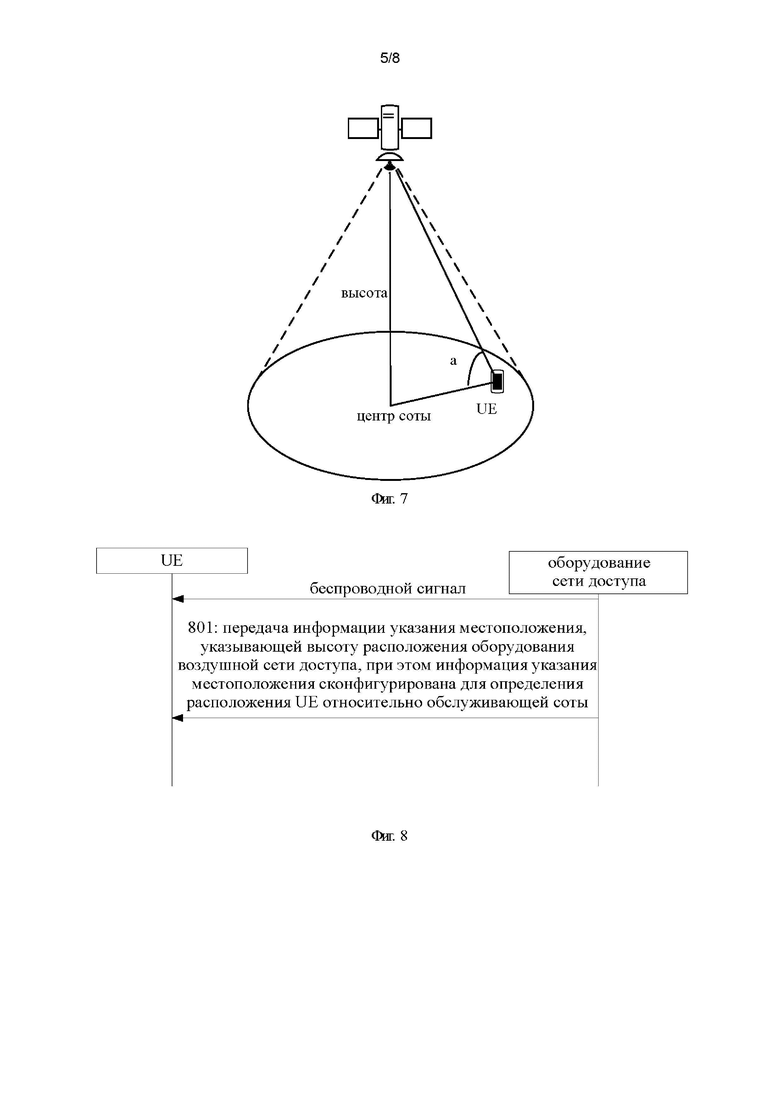
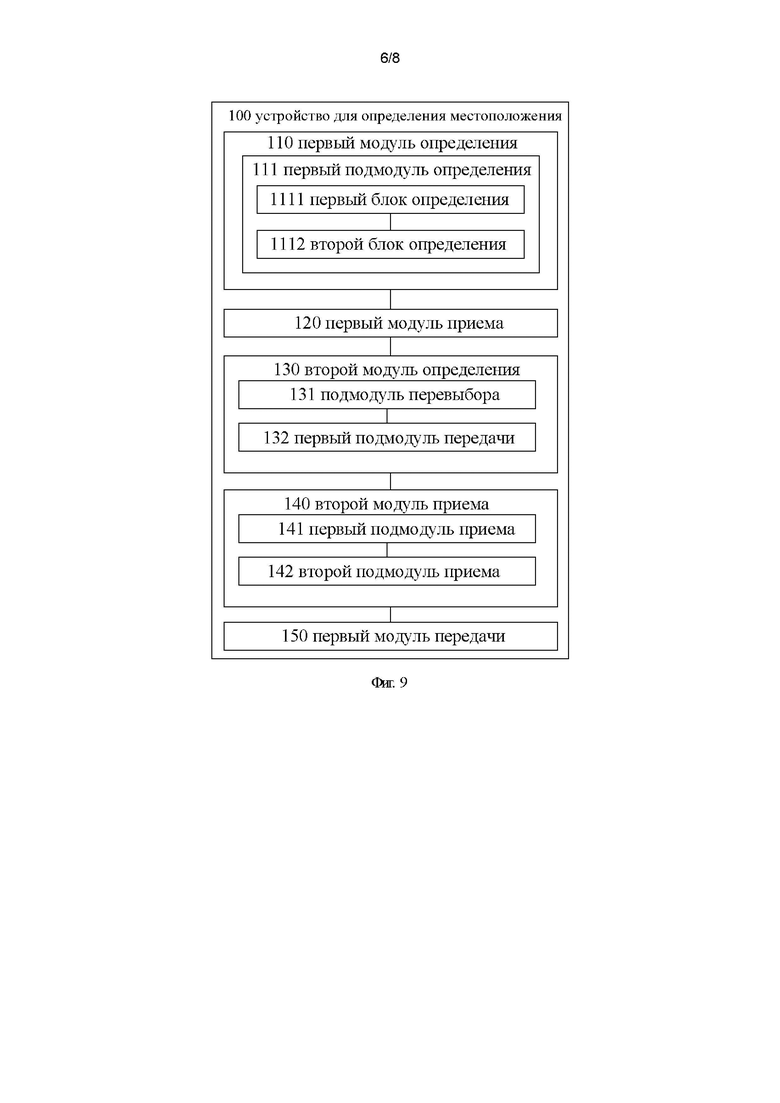
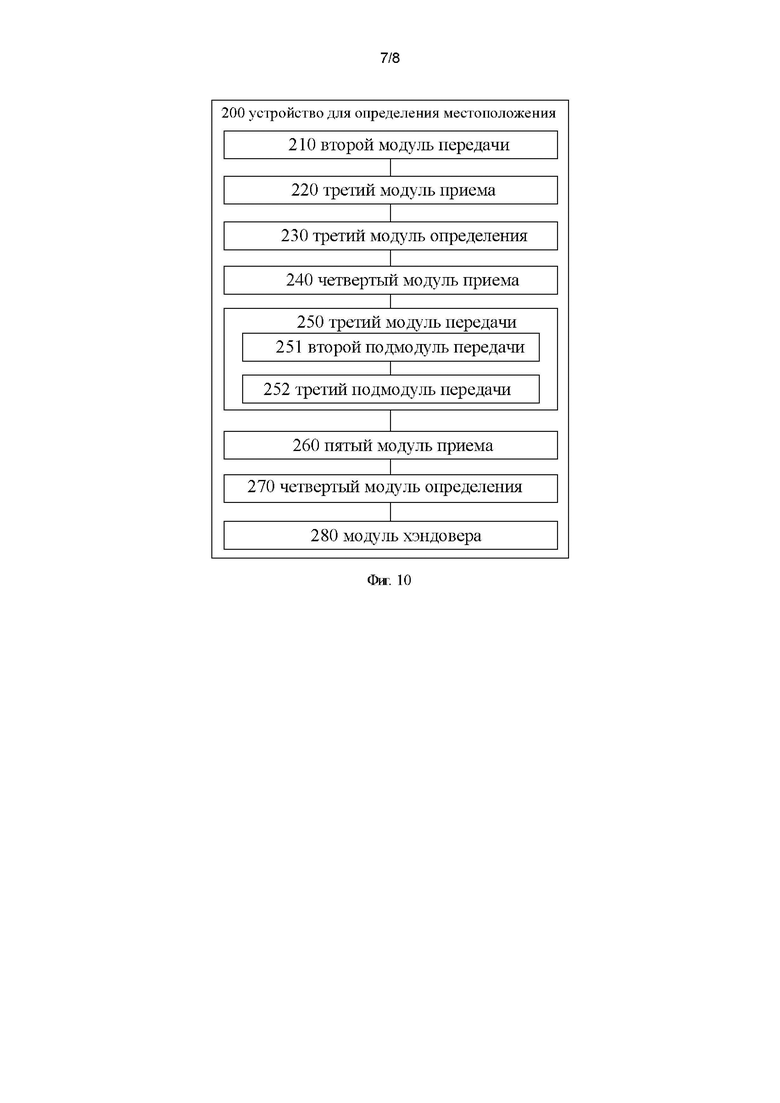
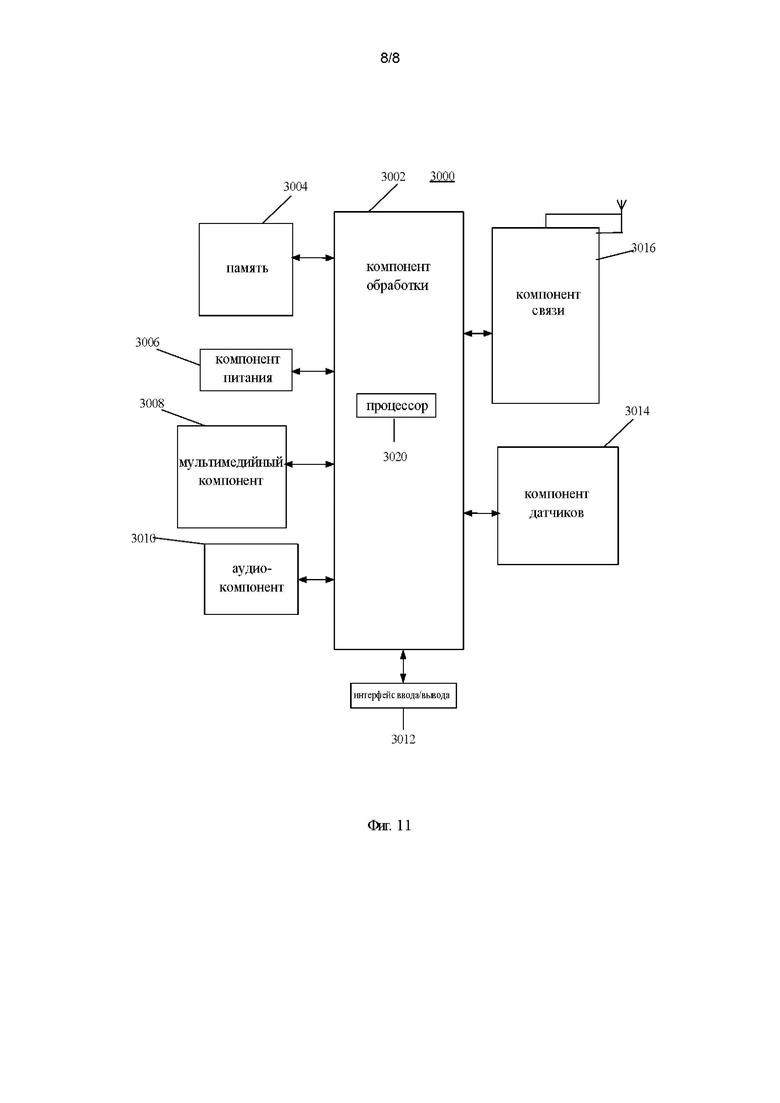
Изобретение относится к области техники беспроводной связи. Технический результат состоит в быстром и точном переключении пользовательского оборудования (UE) в сценариях неназемной сети из-за быстрого изменения положения спутника относительно земли. Для этого расположение UE относительно обслуживающей соты определяется на основе полученного результата измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа. 4 н. и 13 з.п. ф-лы, 11 ил.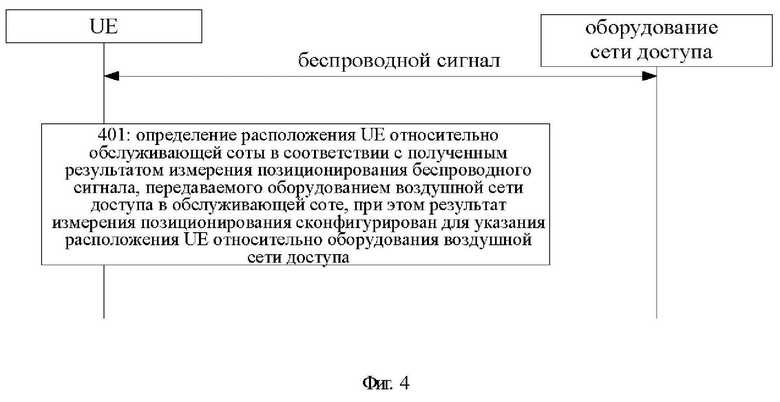
1. Способ определения местоположения, выполняемый пользовательским оборудованием (UE) и включающий:
определение расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа; и
прием информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа;
при этом определение расположения UE относительно обслуживающей соты в соответствии с полученным результатом измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающей соте, включает:
определение расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
2. Способ по п. 1, в котором определение расстояния между UE и центром обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования включает по меньшей мере одно из следующего:
определение расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и углом прихода беспроводного сигнала; и
определение расстояния между UE и центром обслуживающей соты в соответствии с высотой расположения оборудования воздушной сети доступа и расстоянием между UE и оборудованием воздушной сети доступа.
3. Способ по п. 2, в котором расстояние между UE и оборудованием воздушной сети доступа определяют в соответствии со временем прохождения беспроводного сигнала.
4. Способ по любому из пп. 1-3, также включающий:
определение, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты.
5. Способ по п. 4, в котором определение, следует ли выполнять хэндовер между сотами в соответствии с расположением UE относительно обслуживающей соты, включает одно из следующего:
выполнение перевыбора соты в ответ на определение того, что UE находится в состоянии ожидания и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния; и
передачу запроса хэндовера между сотами оборудованию воздушной сети доступа в ответ на определение того, что UE находится в состоянии соединения и расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
6. Способ по п. 5, также включающий:
прием информации указания, указывающей пороговое значение расстояния.
7. Способ по п. 6, в котором прием информации указания, указывающей пороговое значение расстояния, включает по меньшей мере одно из следующего:
прием информации указания, указывающей пороговое значение расстояния, широковещательно передаваемое оборудованием воздушной сети доступа; и
прием сигнализации управления радиоресурсами (RRC), передаваемой оборудованием воздушной сети доступа и несущей информацию указания, указывающую пороговое значение расстояния.
8. Способ по любому из пп. 1-3, также включающий:
передачу информации позиционирования UE в оборудование воздушной сети доступа, при этом оборудование воздушной сети доступа определяет местоположение UE в обслуживающей соте с помощью информации позиционирования UE.
9. Способ определения местоположения, выполняемый оборудованием воздушной сети доступа и включающий:
передачу информации указания местоположения, указывающей высоту расположения оборудования воздушной сети доступа, при этом информация указания местоположения сконфигурирована для определения расположения пользовательского оборудования (UE) относительно обслуживающей соты;
прием от UE результата измерения позиционирования беспроводного сигнала, передаваемого оборудованием воздушной сети доступа в обслуживающую соту, при этом результат измерения позиционирования указывает расположение UE относительно оборудования воздушной сети доступа; и
определение расположения UE относительно обслуживающей соты в соответствии с информацией указания местоположения и результатом измерения позиционирования.
10. Способ по п. 9, в котором результат измерения позиционирования беспроводного сигнала включает по меньшей мере одно из следующего: угол прихода беспроводного сигнала или время прохождения беспроводного сигнала.
11. Способ по п. 9, также включающий:
прием запроса хэндовера между сотами, при этом запрос хэндовера между сотами передают в ответ на определение того, что расстояние между UE и центром обслуживающей соты превышает пороговое значение расстояния.
12. Способ по п. 11, также включающий:
передачу информации указания, указывающей пороговое значение расстояния.
13. Способ по п. 12, в котором передача информации указания, указывающей пороговое значение расстояния, включает по меньшей мере одно из следующего:
широковещательную передачу информации указания, указывающей пороговое значение расстояния; и
передачу сигнализации управления радиоресурсами (RRC), несущей информацию указания, указывающую пороговое значение расстояния.
14. Способ по любому из пп. 9-13, также включающий:
прием информации позиционирования UE; и
определение местоположения UE в обслуживающей соте в соответствии с центром обслуживающей соты и информацией позиционирования UE.
15. Способ по п. 14, также включающий:
выполнение хэндовера между сотами на UE в ответ на определение того, что местоположение UE в обслуживающей соте удовлетворяет условию хэндовера.
16. Устройство связи, содержащее:
процессор;
память, соединенную с процессором и хранящую машиночитаемую программу для определения местоположения, при исполнении которой обеспечивается выполнение процессором этапов способа определения местоположения по любому из пп. 1-8.
17. Носитель данных, на котором хранится исполняемая программа, при исполнении которой процессором обеспечивается выполнение процессором этапов способа определения местоположения по любому из пп. 1-8.
| WO 2019195457 A1, 10.10.2019 | |||
| CN 103974275 B, 25.09.2018 | |||
| СПОСОБ ПОВЫШЕНИЯ НАДЕЖНОСТИ ИНФОРМАЦИИ О МЕСТОПОЛОЖЕНИИ ПРИ ПЕРЕХОДЕ ОТ РЕГИОНАЛЬНОЙ, ШИРОКОМАСШТАБНОЙ ИЛИ ГЛОБАЛЬНОЙ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ ПО ФАЗЕ НЕСУЩЕЙ (WADGPS) К ЛОКАЛЬНОЙ КИНЕМАТИЧЕСКОЙ В РЕАЛЬНОМ ВРЕМЕНИ (RTK) НАВИГАЦИОННОЙ СИСТЕМЕ | 2007 |
|
RU2446416C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОГО ПРИЕМНИКА | 2015 |
|
RU2638411C2 |
| ГОРИЗОНТАЛЬНЫЙ ВЕТРЯНОЙ ДВИГАТЕЛЬ | 1926 |
|
SU5472A1 |
