Предложенное изобретение относится к области тревожной сигнализации, к классу мобильных быстроразвертываемых разведывательно-сигнализационных средств (РСС), и предназначено для формирования рубежей обнаружения людей и технических (в том числе и транспортных) средств на неподготовленных участках местности не только вручную, но и в автоматическом режиме с использованием технических средств доставки.
Очевидно, что устройства, предназначенные для такого применения, должны обладать особенными свойствами. Кроме того, что они должны быть достаточно прочными к механическим воздействиям и, как минимум, малозаметными (маскируемыми), они должны быть способны занимать рабочее положение без участия персонала на участке развертывания, активироваться и настраиваться автоматически или дистанционно, по команде оператора, при функционировании в составе комплекса охраны или технической разведки.
Из открытых источников известны системы разведывательно-сигнализационных приборов (РСП), «REMBASS» L3 Communications и «ADAS» (https://defense-update.com/20060107_rembass-ii-remotely-monitored-battlefield-sensor-system.html), используемые армией США. В их составе есть составные части, развертываемые дистанционно: РСП «DT-570» - сейсмическое средство, доставляемое 155 мм артиллерийским снарядом, «DT-567» - сейсмоакустическое средство и радиоретранслятор «RT-1200» доставляются авиацией. Сложный сейсмоакустический прибор РСП «ADAS» доставляется авиацией.
Упомянутые изделия устанавливаются на местности путем ударного заглубления в грунт при сбрасывании с летательного аппарата или при падении артиллерийского снаряда.
При всех достоинствах этих изделий, таких, как применение пассивных и хорошо маскируемых средств с зоной обнаружения близкой к круговой, что важно для контроля площади, нужно отметить недостатки.
Во-первых, для их развертывания требуется привлекать крупную военную технику, не находящуюся постоянно в распоряжении персонала, эксплуатирующего РСС, что снижает оперативность работы, а также ограничивает возможности применения таких изделий гражданскими организациями.
Во-вторых, точность установки средств такими способами, а особенно, с применением артиллерии, невысока.
В-третьих, используются только сейсмические и сейсмоакустические средства, что недостаточно для многих условий применения, в силу их недостаточной помехоустойчивости. Также, чувствительный элемент сейсмического средства должен быть обязательно заглублен в грунт, что реализуемо не на всех поверхностях при сбросе средства с высоты.
Для повышения эффективности РСС и систем охраны, их использующих, а также для расширения возможностей применения высокомобильных РСС, следует сделать возможным использование в них средств обнаружения (СО), работающих и на других физических принципах, а также использовать в качестве средств доставки относительно компактную технику, не имеющую жесткой ведомственной привязки, и, которая может быть постоянно в распоряжении персонала, и, кроме того, обеспечивающую точность установки устройств, соизмеримую с точностью приборов глобального позиционирования. Данное требование может быть достигнуто при использовании радиотехнических средств обнаружения, которые, хоть и являются активными и имеют большее энергопотребление по сравнению с сейсмическими и акустическими, но на них в гораздо меньшей степени воздействуют помеховые факторы, ограничивающие использование датчиков механических колебаний. В качестве средства доставки удобны по применению беспилотные летательные аппараты (БПЛА) малого класса грузоподъемностью 3-10 кг мультикоптерного типа полной взлетной массой до 30 кг (чтобы избежать законодательных ограничений, накладываемых на БПЛА большей массы), при помощи которых можно обеспечить достаточно точную (от 1 до 5 м), соизмеримую с точностью систем глобального позиционирования, установку средств на местности, путем сброса их с высоты 2-10 м на дальностях до нескольких десятков километров от пункта управления.
Из всех типов радиотехнических СО для создания рубежей обнаружения на неподготовленной местности в составе комплексов РСС, наилучшим образом подходят двухпозиционные радиоволновые средства. Их принцип работы основан на регистрации изменения параметров электромагнитного поля радиоволнового излучения при пересечении нарушителем пространства между приемником и передатчиком средства. Рубеж обнаружения, формируемый приемником и передатчиком радиоволнового СО является объемным с хорошей равномерностью чувствительности и практически не имеет мертвых зон при установке приемника и передатчика на расстояниях до 30 м друг от друга.
Известно техническое решение из патента «Охранно-сигнализационный быстроразвертываемый комплекс» (РФ № 75490, опубл. 10.08.2008), содержащий мобильный комплект средств обнаружения, состоящий из, по меньшей мере, одного комплекта радиотехнических средств обнаружения, включающего, по меньшей мере, два радиотехнических средства обнаружения, по меньшей мере, одного комплекта сейсмического средства обнаружения с передатчиком или приемопередатчиком радиосигналов, по меньшей мере, одного комплекта обрывного средства сигнализации с передатчиком или приемопередатчиком радиосигналов, также комплекс содержит, по меньшей мере, один комплект переносного персонального передатчика или приемопередатчика радиосигналов с системой контроля за состоянием пользователя, содержащей кнопку тревоги и датчик наклона, по меньшей мере, один комплект радиоретранслятора для обеспечения непрерывной радиосвязи на заданной зоне покрытия, по меньшей мере, один комплект источников питания электронных компонентов, входящих в состав комплекса. Каждое радиотехническое средство обнаружения содержит, по меньшей мере, один радиоприемник, обеспечивающий автоматический контроль приема радиосигналов, поступающих на заданной частоте, и оповещение при отсутствии связи с соответствующим радиопередатчиком.
Известны радиотехнические средства обнаружения (РТСО) изделия «Кубань» (см. eleron.ru/production/mobilesystem/kuban-m), являющиеся двухпозиционными радиоволновыми средствами обнаружения, состоящими из специализированных блоков приемников и передатчиков. Рабочий диапазон зондирующего сигнала находится в области 60 МГц, а частота радиоканала, в области 150 МГц. Применение низкочастотного зондирующего сигнала позволило уменьшить влияние на помехоустойчивость мелких предметов, перемещающихся в чувствительной зоне средства, в том числе, растительности. Также, антенные вибраторы зондирующего сигнала, составляющие дипольные антенны и, представляющие из себя провода длиной порядка одного метра, покрытые диэлектриком, оказалось возможным прижать к земле, что исключает переменный контакт с ними колеблющейся растительности. Мощность зондирующего сигнала не превышает 10 мВт, что является приемлемым уровнем с точки зрения радиомаскирования. Мощность передатчиков радиоканала, которыми снабжены приемники средства, достаточно высока и составляет величину порядка 1 Вт. Длительность посылок не превышает 20 мс, а сами посылки достаточно редки, поскольку появляются в эфире только при тревожных событиях. Радиотехнические средства обнаружения изделия «Кубань» хорошо соответствуют требованиям маскируемости и помехоустойчивости для их применения в разведывательно-сигнализационных комплексах.
Недостатками, с точки зрения, решаемой в данном изобретении технической задачи, являются отсутствие возможности дистанционного управления режимами средств и дистанционного развертывания средств.
Наиболее близким аналогом предложенного изобретения является техническое решение, известное из патента «Способ и устройство комбинированного обнаружения нарушителя и передачи сигналов радиосообщений» (РФ № 2 319 211, опубл. 20.07.2007), реализованное в изделии НИКИРЭТ «КСМ РВ». Согласно данному патенту устройство комбинированного обнаружения нарушителя и передачи сигналов радиосообщений содержит радиопульт управления и набор из n конструктивно автономных периферийных приемо-передающих блоков обнаружения. Приемо-передающие блоки и радиопульт управления организуют в пространстве синхронную систему двухсторонних радио адресных обменов сигнальной информацией с возможностью управления работой приемо-передающими блоками со стороны радиопульта и работой радиопульта по сигналам от блоков. Формируемые между блоками пространственные линии радиосвязи являются одновременно и двухпозиционными радиоволновыми зонами обнаружения. Конструкция, характеристики и методики применения изделия КСМ РВ описаны в руководстве по эксплуатации на изделие (см. ktso-doc.ru/001 nikiret/ksm-rv/re-ksm-rv.php). Для обеспечения помехоустойчивости, связанной с условиями распространения электромагнитных волн используемого диапазона и колебаниями растительности при ветре, у изделия «КСМ РВ» вибраторы антенн приемопередающих блоков приподняты на жестких стержнях на высоту порядка 1 м над землей, что позволяет уменьшить затухание сигнала и влияние приземной растительности, по сравнению с расположением антенн у поверхности земли. Изделие «КСМ РВ» предназначено, главным образом для задач охраны и поэтому его маскируемость, высоко востребованная в комплексах РСС, не является важным требованием для него.
К недостаткам, с точки зрения возможности использования изделия в составе разведывательно-сигнализационных комплексов (комплексов РСС) относится то, что периферийные блоки требуют ручной установки, путем заглубления в грунт специального штыря в нижней части корпуса. При этом его вертикально стоящий метровый стержень с вибратором антенны также является демаскирующим фактором. Кроме конструкции, значительный вклад в демаскирование изделия вносит способ организации работы средства, по сути, являющегося системой, состоящей, как описано в патенте, из приемопередающих периферийных блоков и радиопульта управления. Информационное взаимодействие в этой системе, состоящей из N периферийных блоков обнаружения (в реальном изделии до 30 штук) и радиопульта управления, организовано по схеме «звезда», то есть, каждый из блоков связан напрямую с пультом по выделенному временному каналу. В каждый момент времени в эфире в режиме передачи может работать только один периферийный блок. Радиосигналы периферийных блоков используются как зондирующие сигналы двухпозиционных радиоволновых средств обнаружения, образованных парами периферийных блоков. Причем, когда блоки работают в дежурном («активном») режиме, то есть, в режиме средства обнаружения, уровень излучаемой ими мощности более чем в 100 раз меньше, чем при связи с радиопультом управления и не превышает уровня 10 мВт, что является приемлемым уровнем радиоизлучения с точки зрения радиомаскируемости. Для связи периферийных блоков и радиопульта, соответственно, мощность радиосигнала составляет величину от 200 до 500 (и более) мВт. Такая мощность требуется, чтобы передать на радиопульт сигнал тревоги, либо техническую информацию. Эти посылки имеют длительность несколько миллисекунд, достаточно редки (в среднем, до 10 раз в сутки на всю систему) и распределены по времени случайным образом, что тоже соответствует приемлемому уровню для радиомаскируемости. Однако центральный радиопульт для того, чтобы обеспечить синхронизацию системы, посылает в эфир в широковещательном режиме радиоимпульсы, определяющие начало цикла поочередной работы на передачу периферийных блоков. Излучаемая мощность синхроимпульсов такая же, как и мощность радиосигнала периферийного блока при передаче сигнала тревоги. Синхроимпульс имеет малую длительность - доли миллисекунды, но излучается в начале каждого рабочего цикла периферийных блоков, то есть, не менее 50 раз в секунду. Суммарная энергетика постоянно излучаемых радиопультом синхроимпульсов является неприемлемой с точки зрения принципов радиомаскируемости для работы в составе комплексов РСС.
Синхронизации периферийных устройств можно достигнуть при меньших уровнях излучаемой мощности, если использовать принцип самосинхронизации устройств, образующих рубеж обнаружения. В этом случае, для приемопередающего устройства, установленного в цепочке аналогичных устройств, импульсы зондирующего сигнала от предыдущего устройства используются им, как сигнал синхронизации, а импульсы его зондирующего сигнала, как сигнал синхронизации для последующего.
Этот способ синхронизации, как и способ передачи тревожной информации по лучу зондирующего сигнала, путем последовательной эстафетной ретрансляции от устройства к устройству, был использован в изделии ««Витим МСБ» (см. eleron.ru/production/mobilesystem/vitim-msb).
Недостатком реализованного в этих изделиях способа передачи информации является, с точки зрения задач, решаемых в предлагаемом изобретении, то, что сигналы могут передаваться только в одну сторону, в силу, принципиальных особенностей устройства изделий, от приемопередатчика с меньшим номером в сторону устройств с большими номерами, что исключает возможность управления режимами устройств с рабочего места оператора комплекса.
Технической проблемой, на решение которой направлено настоящее изобретение, является расширение функциональных и эксплуатационных возможностей системы устройств, использующих радиоволновый принцип обнаружения, для применения в комплексах разведывательно-сигнализационных средств (РСС), предназначенных для развертывания не только вручную, но и для дистанционного развертывания на рубежах без участия персонала, с учетом свойств технических средств доставки.
Техническим результатом является возможность автоматического развертывания рубежей обнаружения комплексов РСС, включающих в себя радиоволновые средства обнаружения, в том числе и путем сброса составных частей с беспилотного летательного аппарата по заданным координатам, и дистанционного управления их режимами.
Для достижения заявленного технического результата предложена мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей, состоящая из n однотипных приемопередающих модулей, формирующих между каждыми двумя соседними чувствительную зону двухпозиционного радиоволнового средства зону обнаружения и связанного с ними путем эстафетной передачи информации радиоретранслятора для связи с пунктом управления комплексом охраны; при этом, каждый из упомянутых приемопередающих модулей содержит антенну, соединенную с узлом приемопередачи и обработки, состоящем из приемопередатчика и соединенного с ним контроллера с подключенным к нему акселерометром; ко входам/выходам контроллера узла приемопередачи и обработки подключены узел питания, узел активации, узел ближней связи с интегрированной антенной, осуществляющий связь по беспроводному каналу с сервисными устройствами, при этом упомянутый радиоретранслятор состоит из узла приемопередачи и обработки с подключенными к нему узлом питания, узлом активации, узлом ближней связи и соединенного с узлом приемопередачи и обработки, узла дальней связи, осуществляющего связь с удаленным пунктом управления, к высокочастотным входам/выходам узла дальней связи и узла приемопередачи и обработки подключены антенны.
Приемопередающие модули мобильной быстроразвертываемой системы содержат компактные антенны, размещенные внутри радиопрозрачного корпуса, имеющего продолговатую форму близкую к цилиндрической с уплощениями на боковых поверхностях и выпуклыми торцами, и шарнирные подвесы, размещенные на оси длинной части корпуса, обеспечивающие самостоятельное позиционирование функциональной части устройства.
Активация составных частей системы производится бесконтактно, путем воздействия на узел активации магнитным ключом. Техническое обслуживание также производится бесконтактно, благодаря бесконтактному зарядному устройству узла питания и подключению сервисных устройств по беспроводному каналу связи к узлу ближней связи.
Включение системы происходит в автоматическом режиме после последовательного занятия приемопередающими модулями рабочего положения, и автоматического присвоения им номеров, за счет использования встроенного акселерометра и их синхронизации по сигналам друг друга. Информационное взаимодействие внутри упомянутой мобильной быстроразвертываемой системы осуществляется по каналу зондирующего сигнала радиоволнового средства обнаружения без использования мощных внешних сигналов синхронизации, путем эстафетной передачи сигнала от модуля к модулю и до радиоретранслятора, контролируемого из удаленного пункта управления. Благодаря структуре информационных посылок, имеющих в себе признаки статуса посылки, адреса события, адресата команды и. адреса передающего устройства и типа средства обнаружения, а также цикличности работы всей структуры системы, осуществляется, как получение информации от каждого из устройств, так и управление ими с пульта оператора, находящегося в пункте управления. Также, к контроллеру узла приемопередачи и обработки любой СЧ может быть подключено дополнительное устройство, предназначенное для функционирования в качестве средства обнаружения на ином физическом принципе, сейсмическом, магнитометрическом и др., а также выполнения роли исполнительного устройства, в том числе, для воздействия на нарушителя и/или самоликвидации.
Упомянутая техническая задача в настоящем изобретении решена следующим образом.
Определен диапазон электромагнитных волн (130-170 МГц), использование которого позволяет уменьшить требуемый размер антенн и при этом размещать их на высоте менее 30 см, то есть, ниже уровня среднего травяного покрова. Также разработана компактная антенна приемлемой эффективности для размещения внутри радиопрозрачного корпуса устройства.
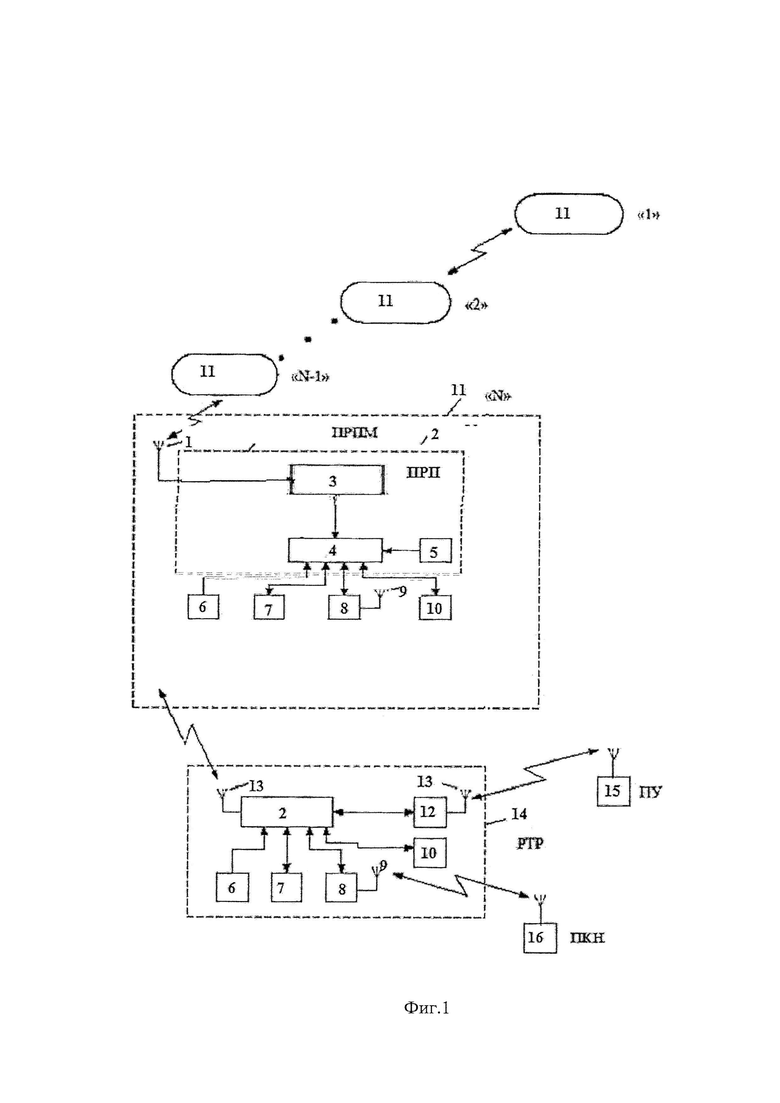
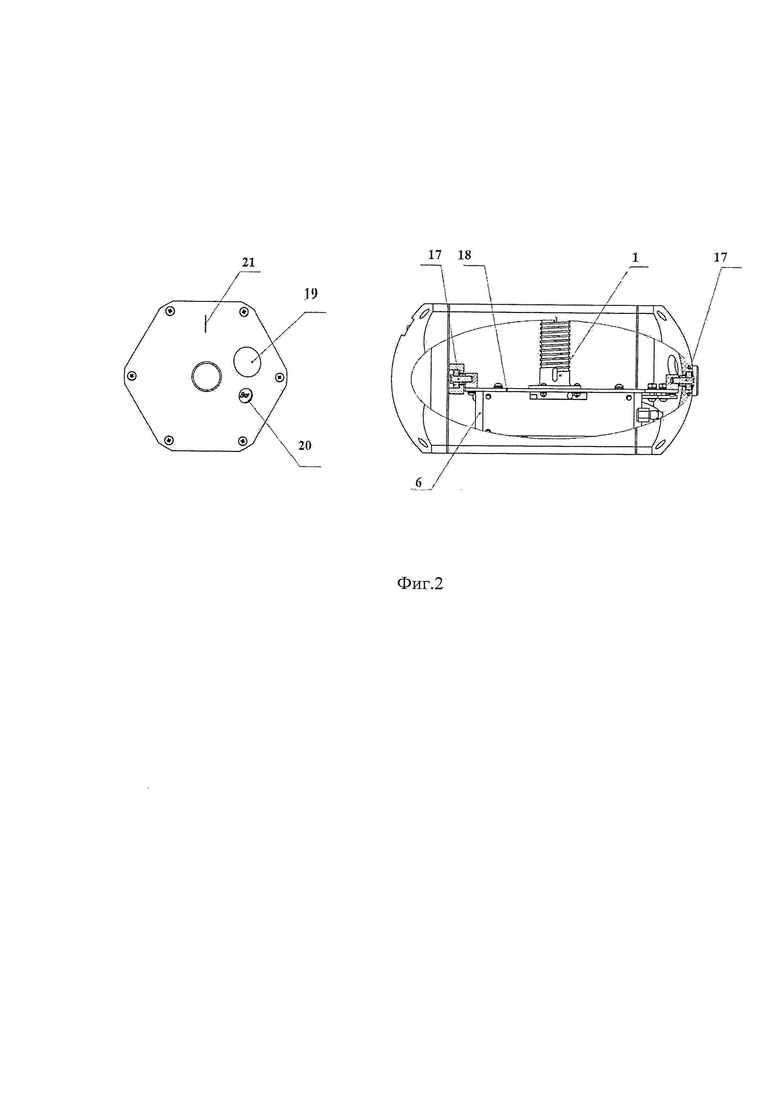
На фиг. 1 представлена функциональная схема системы. На фиг. 2 представлена конструкция модуля ПРПМ из состава опытного образца системы.
Как упомянуто выше, средство состоит из n однотипных приемопередающих модулей (ПРПМ) 11 и радиоретранслятора (РТР) 14. Каждый из упомянутых модулей (ПРПМ) 11 содержит антенну 1, соединенную с узлом приемопередачи и обработки (ПРП) 2, состоящем из приемопередатчика 3 и соединенного с ним контроллера 4 с подключенным к нему акселерометром 5; ко входам/выходам контроллера 4 узла приемопередачи и обработки 2 подключены узел питания 6, узел активации 7, узел ближней связи 8 с интегрированной антенной 9, и может быть подключено дополнительное устройство (ДУ) 10; упомянутый радиоретранслятор 14 состоит из узла ПРП 2 с подключенными к нему узлом питания 6, узлом активации 7, узлом ближней связи 8 и соединенного с упомянутым ПРП 2, узла дальней связи 11, осуществляющего связь с удаленным пунктом управления ПУ 15; к высокочастотным входам/выходам узлов дальней связи 11 и ПРП 2 подключены антенны 13, упомянутое дополнительное устройство ДУ 10 также может быть интегрировано в радиоретранслятор 14, будучи подключенным к его узлу приемопередачи и обработки ПРП 2.
Корпус модуля ПРПМ выполнен из ударопрочного радиопрозрачного пластика, и представляет собой шестигранную призму со сглаженными ребрами. Торцы призмы закрыты крышками в виде сегментов сферы. Размеры корпуса выбраны таким образом, чтобы его можно было держать одной рукой поперек его более длинной части.
В центрах сферических крышек установлены шарнирные подвесы 17, на которых внутри корпуса закреплена металлизированная пластина 28, являющаяся основой конструкции функциональной части ПРПМ (на фиг. 1 обозначается под номером 11). На верхней части пластины расположен спиральный вибратор антенны специальной конструкции 1. Пластина является для нее электродинамическим противовесом, а корпус модуля является одновременно блистером, защищающим ближнюю зону антенны от критических внешних воздействий. Узел питания 6 расположен на нижней стороне пластины вдоль оси модуля и состоит из литиевого аккумулятора и бесконтактного зарядного устройства, помещенных в пластиковый корпус. Узел приемопередачи и обработки (ПРП), 2 узел активации 7 с герконовым коммутационным элементом (магниточувствительным контактом) и светодиодным индикатором и узел ближней связи 8 с его антенной 9 расположены на боковых поверхностях узла питания и на нижней части пластины 18.
На одном из сферических торцов корпуса расположены круглое прозрачное окошко 19 и сферическая выемка 20. Также на нем расположена метка в виде черточки 21, геометрически находящаяся на радиусе сферы. При расположении на горизонтальной плоскости таким образом, что когда черточка находится в верхней части и вертикальна, прозрачное окошко оказывается напротив светодиода узла активации, а сферическая выемка напротив герконового коммутационного элемента для удобства при процедуре активации модуля магнитным ключом. Бесконтактное зарядное устройство узла питания 6 обеспечивает возможность заряда аккумулятора без вскрытия корпуса, на котором отсутствуют внешние разъемы, а узел ближней связи 8 предназначен для связи с внешними устройствами по беспроводному каналу для настроек и контроля параметров и режимов модуля.
В системе для этих целей предусмотрен пульт контроля и настройки ПКН 16. Такое устройство и компоновка модуля обеспечивает возможность работы с ним дистанционно при помощи механических манипуляторов, а также роботизированных и автоматических устройств как в режиме применения по назначению, так и при техническом обслуживании, не требующем у данных устройств вскрытия корпуса. Вскрытие корпуса необходимо только для ремонта устройства, в случае выхода его из строя.
После падения на поверхность земли модуль ПРПМ 11 обязательно занимает устойчивое положение преимущественно на одной из граней шестигранной призмы корпуса. Из за неровностей почвы может возникнуть отклонение от горизонтального положения, но оно практически никогда не достигает 45° и является допустимым для функционирования устройств. Функциональная часть внутри корпуса, вращаясь на подвесах вокруг продольной оси модуля, за счет силы тяжести, обеспечивает отклонение вибратора антенны от вертикали на угол, не превышающий отклонения от горизонтали продольной оси корпуса, лежащего на поверхности. Таким образом осуществляется самостоятельное позиционирование устройства, при этом антенна 1 защищена от контактов с растительностью и других критических воздействий.
Активация устройства происходит при выполнении процедуры развертывания. Алгоритм развертывания связан с применением магнитного ключа, воздействующего на коммутационный элемент, входящий в узел активации 7 функциональной части ПРПМ и оценкой контроллером узла приемопередачи и обработки (ПРП) 2 сигналов от акселерометра 5, расположенного там же. После воздействия магнитного ключа на герконовый коммутационный элемент, контроллер 4 анализирует показания акселерометра 5, который выдает данные об ускорении модуля, его перемещении, а также о положении в пространстве функциональной части модуля. Весь этот период, когда происходит движение функциональной части в пространстве, относится к режиму транспортировки. При занятии модулем фиксированного положения и прекращении колебаний на подвесах функциональной части модуля, акселерометр регистрирует отклонение вибратора антенны от вертикальной оси, и если оно не превышает 45°, то контроллер переводит модуль в режим присвоения номера. В режиме присвоения номера, модуль ПРПМ И работает на прием, анализируя информацию, имеющуюся на установленном канале зондирующего сигнала. При отсутствии в эфире посылок от других таких же модулей, модулю автоматически присваивается № 1. После этого модуль выходит в эфир со своей посылкой, несущей присвоенный ему номер. Посылки следуют со скважностью 6 относительно их длительности. Со следующим по очереди модулем происходит то же самое, только в режиме присвоения номера, ему присваивается № 2, поскольку в эфире присутствует посылка с номером модуля № 1. Посылка модуля № 2 следует сразу за посылкой модуля № 1. Так происходит вплоть до модуля № 6. Модуль № 7 занимает своей посылкой первую позицию в цикле, но, в связи с тем, что при штатной установке от него до модуля № 2 расстояние не менее 50 метров, коллизий такое участие модулей с номерами более чем «6» не вызывает. Последним в цепочке устанавливается радиоретранслятор РТР 14. РТР 14 содержит так же, как и модуль ПРПМ И узел ПРП 2, узел питания 6, узел активации 7, узел ближней связи 8. В отличие от ПРПМ 11, РТР 14 содержит узел дальней связи 12, соединенный с логическим входом/выходом узла ПРП 2. Также, в отличие от ПРПМ 11, для работы в эфире узла ПРП 2, в РТР используется более эффективная антенна 13. Находящаяся снаружи корпуса РТР, поскольку ПРП, входящий в РТР, не выполняет функции средства обнаружения, а используется только для связи с Модулями ПРПМ 11. Узел дальней связи 12 имеет мощный передатчик для связи с пунктом управления (ПУ) 15 комплекса и использует аналогичную по конструкции эффективную антенну 13, располагающуюся снаружи корпуса.
После занятия рабочего положения, радиоретранслятор РТР 14 некоторый период времени работает на прием, анализируя сигналы доступных для приема модулей 11, посредством узла приемопередачи и обработки ПРП 2. Его чувствительность автоматически регулируется таким образом, чтобы уверенно принимать сигналы от двух ближних к нему модулей. В соответствии с принятой информацией, РТР 14 занимает для своего периода передачи следующее временное окно после модуля с наибольшим номером. РТР в автоматическом режиме производит контроль работоспособности цепочки модулей, связывается с пунктом управления ПУ 15, информируя о готовности к работе, и, получив команду оператора, либо по предустановленному алгоритму автономной работы, отдает команду цепочке модулей на переход в режим работы средства обнаружения, либо в спящий режим для включения по требованию оператора комплекса.
Каждый из модулей ПРПМ 11 является приемником и передатчиком, чередуя период работы в режиме передачи ttn, где «n» является номером модуля с периодом работы в режиме приема trn. Период времени между периодами работы в режиме передачи является рабочим циклом средства Т, в который входят 6 временных окон. Модуль с номером «1» работает на передачу в первом временном окне, модуль с номером «2» во втором, и так далее до «6». Модуль с номером «7» работает на передачу в первом временном окне рабочего цикла, модуль с номером «8» - во втором. Расстояние между соседними модулями от 10 до 20 м, поэтому одновременная работа двух модулей с различными номерами в одном временном окне рабочего цикла к коллизиям не приводит.
Контроллер 4, обозначенный на схеме, управляет работой приемопередатчика 3. Режимы приема и передачи чередуются в соответствии с установками контроллера 4, заданными через узел ближней связи 8 внешним устройством (ПКН) 16 по беспроводному каналу связи при подготовке к работе. С аналогового выхода приемопередатчика 3 на вход АЦП контроллера 4 поступает низкочастотный сигнал, вызванный модуляцией зондирующего сигнала соседнего модуля объектом, перемещающимся в чувствительной зоне между модулями для дальнейшей обработки, а так же с другого выхода приемопередатчика 3 на логический вход контроллера 4 поступает информация в виде последовательных импульсов, полученная в результате обработки приемопередатчиком частотно-модулированного сигнала от соседних модулей 11, содержащаяся в зондирующем сигнале соседних модулей.
Низкочастотный сигнал подвергается обработке контроллером, и при работе в режиме настройки его величина используется для автоматической настройки усиления приемного тракта приемопередатчика с целью обеспечения требуемого динамического диапазона при обработке сигнала вызванного модуляцией электромагнитного поля объектом обнаружения во время работы в режиме СО (средства обнаружения). Во время работы в режиме СО, контроллер 4, ко входу АЦП (аналого-цифрового преобразователя) которого подключен аналоговый выход приемопередатчика 3, применяя предустановленные известные алгоритмы обработки, анализирует поступившую с приемопередатчика аналоговую информацию и вырабатывает сигнал тревоги.
Во время работы в отсутствии тревожных факторов, контроллер каждого модуля при работе на передачу, вырабатывает сигнал для управления приемопередатчиком 3, несущий в себе сигнал о его «спокойном» состоянии, так называемый «ОК», дважды адрес модуля и тип СО, представляющего модуль в данной посылке (при сигнале «ОК», это «РТСО»). При тревожном событии «ОК» меняется на «ТРЕВОГА». Эти посылки в виде частотно модулированного сигнала высокой частоты излучается приемопередатчиком 3 при помощи антенны 1.
Алгоритм выработки контроллером сообщений таков, что при отсутствии тревожных факторов, контроллер вырабатывает «ОК» тогда, когда модуль, не регистрирует собственную «тревогу» и (если он не первый в цепочке) принимает от предыдущего модуля его сигнал «ОК». В случае приема от предыдущего модуля сообщения о каком-либо событии, модуль пересылает это сообщение дальше, подменяя в нем только адрес передавшего (предыдущего) модуля на свой, но только в той позиции, в которой указывается номер (адрес) модуля передающего в данный момент. Кроме того, дополнительное устройств (ДУ) 10, которое может быть интегрировано в функциональную часть модуля ПРПМ 11, подключается к сигнальному входу контроллера 4. Контроллер использует сигнал его срабатывания для формирования тревожного или технического сообщения, кроме того, осуществляет его опрос и управляет его работой по команде оператора пункта управления ПУ 15.
В опытном образце изделия реализована интеграция магнитометрического датчика в несколько модулей из всего состава системы. Также, используется и сигнал от встроенного акселерометра 5, играющего роль тревожного датчика положения, когда модуль находится в каком либо из рабочих режимов. Таким образом, что, если модуль ПРПМ даже находится в спящем режиме (спящий режим тоже относится к рабочим режимам) и его ПРП ничего не излучает и не принимает, то его акселерометр все равно опрашивается в периоды дежурного включения режима приема, и, если произошло изменение положения модуля, происходит автоматический перевод ПРПМ в активный режим с выдачей тревожного сообщения.
Сигнал, генерируемый контроллером 4 и передаваемый в эфир приемопередатчиком 3 через антенну 1, имеет следующую структуру:
1) статус посылки (сообщение или команда);
2) номер передающего в данный момент модуля;
3) номер модуля в котором зарегистрировано событие (номер модуля, который должен выполнить команду);
4) событие (команда).
Благодаря части сигнала, определяющего статус посылки, организуется направление ее передачи в цепочке. Так, сообщения передаются в сторону большего номера и, в конечном счете, на радиоретранслятор РТР. При этом сообщение, повторенное модулем № n+1 после модуля с № n (в соответствии с алгоритмом с изменением номера передающего с N на n+1), является для модуля № n квитанцией, по которой он перестает повторять передачу данного тревожного, или технического сообщения, и переходит к передаче «ОК», или следующего сообщения, если такое имеется. Такой же квитанцией для модуля № n+1 является команда, повторенная модулем №n, так как команды передаются от ретранслятора к требуемому модулю по направлению в начало цепочки. В случае ошибки при приеме посылки модулем № n от соответствующего модуля (сообщения от модуля № n-1, или команды от модуля № n+1), модуль №n, определив ошибочность посылки, либо по контрольной сумме, либо, сравнив его с «библиотекой возможных», продолжает передавать ту кодограмму, которую передавал до определения ошибки.
Поскольку режим работы каждого модуля на передачу цикличен и окно на передачу повторяется через 5 окон его работы на прием, то при безошибочной передаче информации, сообщение о событии достигнет радиоретранслятора через время k × t, где k - количество модулей между модулем, пославшим сообщение, и радиоретранслятором, a t - длительность одного окна на прием/передачу. При одной ошибке при приеме/передаче информации это время увеличится на Т = 6t, то есть до следующей возможности повторить передачу сигнала, который был некорректно принят.
При передаче радиоретранслятором команды на модуль с номером «N-k», время прохождения команды составит k × Т, где T = 6t, поскольку модуль, принимая посылку с командой, будет иметь окно на передачу только через 5 окон.
Шестикратная разница между временем доставки сообщений и передачи команд на устройства, находящихся в цепочке, приемлема, тем более, что возможна ситуация, когда сообщений, требующих доставки, может быть более одного.
Сообщение описанной выше структуры принимается радиоретранслятором РТР 14, установленным в конце цепочки и с помощью передатчика большей мощности (узла дальней связи) 12, работающего на частоте комплекса РСС, пересылается на АРМ оператора пункта управления (ПУ) 15 РСС, в том формате, который принят в данном комплексе.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И ОХРАННОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2725708C1 |
| МНОГОЗОНАЛЬНАЯ РАДИОВОЛНОВАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2013 |
|
RU2557481C1 |
| СПОСОБ И УСТРОЙСТВО КОМБИНИРОВАННОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ПЕРЕДАЧИ СИГНАЛОВ РАДИОСООБЩЕНИЙ | 2005 |
|
RU2319211C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ ДЛЯ ОХРАНЫ ПЕРИМЕТРОВ | 2007 |
|
RU2371776C2 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ БЕСПРОВОДНОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2015 |
|
RU2614565C2 |
| Многозональный способ обнаружения нарушителя | 2019 |
|
RU2724803C1 |
| Способ обнаружения нарушителя на контролируемом рубеже | 2019 |
|
RU2719505C1 |
| РАДИОЛОКАЦИОННЫЙ МОДУЛЬ И ИЗВЕЩАТЕЛИ ОХРАНЫ НА ЕГО ОСНОВЕ | 2009 |
|
RU2406154C1 |
| Дистанционно устанавливаемый радиоволновый извещатель и способ его применения | 2019 |
|
RU2724146C1 |
| Способ дистанционной установки комбинированного средства охранной сигнализации | 2021 |
|
RU2780146C1 |
Изобретение относится к области тревожной сигнализации, к классу мобильных быстроразвертываемых разведывательно-сигнализационных средств. Техническим результатом является возможность автоматического развертывания рубежей обнаружения комплексов РСС. Технический результат заявляемого технического решения достигается тем, что в заявленном решении предусмотрена мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей, состоящая из n однотипных приемопередающих модулей, формирующих чувствительную зону обнаружения, и связанного с ними путем эстафетной передачи информации радиоретранслятора для связи с пунктом управления комплексом охраны; при этом каждый из упомянутых приемопередающих модулей содержит антенну, соединенную с узлом приемопередачи и обработки, состоящим из приемопередатчика и соединенного с ним контроллера с подключенным к нему акселерометром. 8 з.п. ф-лы, 2 ил.
1. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей, состоящая из n однотипных приемопередающих модулей, формирующих между каждыми двумя соседними чувствительную зону двухпозиционного радиоволнового средства, зону обнаружения и связанного с ними путем эстафетной передачи информации радиоретранслятора для связи с пунктом управления комплексом охраны; при этом каждый из упомянутых приемопередающих модулей содержит антенну, соединенную с узлом приемопередачи и обработки, состоящим из приемопередатчика и соединенного с ним контроллера с подключенным к нему акселерометром; ко входам/выходам контроллера узла приемопередачи и обработки подключены узел питания, узел активации, узел ближней связи с интегрированной антенной, осуществляющий связь по беспроводному каналу с сервисными устройствами, при этом упомянутый радиоретранслятор состоит из узла приемопередачи и обработки с подключенными к нему узлом питания, узлом активации, узлом ближней связи, и соединенного с узлом приемопередачи и обработки, узла дальней связи, осуществляющего связь с удаленным пунктом управления; к высокочастотным входам/выходам узла дальней связи и узла приемопередачи и обработки подключены антенны.
2. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что приемопередающие модули содержат компактные антенны, размещенные внутри радиопрозрачного корпуса, имеющего продолговатую форму, близкую к цилиндрической, с выпуклыми торцами и уплощениями на боковых поверхностях, и шарнирные подвесы, размещенные на оси длинной части корпуса, обеспечивающие самостоятельное позиционирование функциональной части устройства.
3. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что узел активации, находящийся в каждой из составных частей системы, позволяет проводить процесс активации бесконтактно.
4. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что узел питания, находящийся в каждой из составных частей системы, позволяет производить зарядку источника питания составной части бесконтактно, в том числе и с помощью дистанционно управляемых, роботизированных и автоматических устройств.
5. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что узел ближней связи, находящийся в каждой составной части, позволяет проводить все операции по развертыванию и техническому обслуживанию с использованием беспроводного канала связи с помощью дистанционно управляемых, роботизированных и автоматических устройств.
6. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что включение системы происходит в автоматическом режиме после последовательного занятия приемопередающими модулями рабочего положения и автоматического присвоения им номеров, за счет использования встроенного акселерометра и их синхронизации по сигналам друг друга.
7. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что информационное взаимодействие внутри системы, состоящей из n приемопередающих модулей и ретранслятора, осуществляется по каналу зондирующего сигнала радиоволнового средства обнаружения без использования мощных внешних сигналов синхронизации, путем эстафетной передачи информации от модуля к модулю до радиоретранслятора и обратно, при этом, благодаря структуре информационных посылок, имеющих в себе признаки статуса посылки, адреса события, адресата команды и адреса передающего устройства и типа средства обнаружения, а также цикличности работы всей структуры системы, осуществляется как получение информации от каждого из устройств, так и управление ими с пульта оператора, находящегося в пункте управления.
8. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что к упомянутому контролеру узла приемопередачи и обработки каждой из составных частей может быть подключено дополнительное устройство, предназначенное для функционирования в качестве средства обнаружения на ином физическом принципе, сейсмическом, магнитометрическом и др., а также выполнения роли исполнительного устройства, в том числе для воздействия на нарушителя и/или самоликвидации.
9. Мобильная быстроразвертываемая система обнаружения для дистанционного формирования рубежей по п. 1, отличающаяся тем, что имеется возможность автоматического развертывания путем последовательного сброса составных частей с беспилотного летательного аппарата.
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| US 7961094 B2, 14.06.2011 | |||
| US 9633535 B2, 25.04.2017 | |||
| Интеллектуальная сетевая система мониторинга охраняемой территории | 2016 |
|
RU2629521C1 |
| МНОГОЗОНАЛЬНАЯ РАДИОВОЛНОВАЯ СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2013 |
|
RU2557481C1 |
| Беспроводная самоорганизующаяся сетевая система мониторинга охраняемой территории | 2016 |
|
RU2620239C1 |
| RU 2018130380 A, | |||

