Изобретение относится к гидролокации, а более конкретно к гидролокационной съемке нижней поверхности ледяного покрова.
Известен способ съемки нижней поверхности ледяного покрова (Гудошников Ю.П., Козлов Д.Н., Кубышкин Н.В, Водолазные исследования торосов и стамух в Баренцевом море в 2003 г. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе. СПб. 2004. Труды ААНИИ. Том 449, с.238-246 [1]). который заключается в следующем. В небольшие майны, расположенные в районах работ по разбуриванию торосов морфометрии и подводной гидролокации, опускается видеокамера в герметичном боксе для выбора места спуска водолазов. Критерием при выборе места спуска является наличие участка ровного льда не далее 50 м от наиболее заглубленной части киля тороса. На выбранном участке ровного льда готовится рабочая майна размером 2×1.5 м для спуска водолазов, расчищается от снега световая дорожка от майны к торосу для увеличения освещенности под водой. Рядом с майной устанавливается обогревательная палатка. Спуск водолазов выполняется в специальных гидрокостюмах. Подводная фото- и видеосъемка производится на цифровую видеокамеру, аналоговую видеокамеру и фотоаппарат «Зенит ЕТ» с объективом «Мир», помещенные в герметичные боксы. Для масштабирования изображений на боксы устанавливают лазерные указатели, обеспечивающие параллельные лучи с базовым расстоянием 0,5 м. Для проверки глубины отснятых объектов и ориентации камеры перед ее объективом устанавливают глубиномер с указателями крена и дифферента. Для подсветки снимаемых объектов используют подводные светильники 200 Вт и две фотовспышки по 80 Дж каждая. Цифровая и аналоговая видеокамеры в боксах, светильники с аккумуляторами и лазерные указатели конструктивно смонтированы в одном блоке. Для привязки подводных наблюдений к данным бурения в скважины опускают маркированные рейки таким образом, чтобы маркировка была хорошо различима для подводного наблюдателя. После проведения съемок, по полученным фото- и видеоматериалам выполняют анализ о морфометрии подводной части ледяного покрова.
Данный способ имеет существенные ограничения по использованию, обусловленные пределом погружения водолазов, наличие мутности в водных слоях. Кроме того. привязка подводных наблюдений с использованием маркированной рейки имеет невысокую точность, что при камеральной обработке полученных материалов может внести дополнительную погрешность. Реализация способа весьма трудоемкая.
Известен также способ и устройство для его осуществления (Гидролокационная съемка нижней поверхности ледяного покрова / Зубакин Г.К., Криницкий П.И., Гудошников Ю.П. и др. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе. СПб. 2004. Труды ААНИИ. Том 449, с.229-237 [2]), который реализуется следующим образом. Во льду рядом с исследуемым объектом на расстоянии 20-50 м бурится лунка диаметром не менее 180-220 мм. В лунку, проверенную на наличие «подсовов». опускается антенная конструкция на глубину сканирования. Рядом устанавливается палатка, в которой размещается регистрирующая аппаратура. Над лункой размещается поворотная платформа. Кабель-трос зажимается во втулке поворотной платформой. С помощью анкерного устройства антеннам придают рабочее положение. К приемопередатчику подключается кабель от антенного модуля и линия от подводного блока с телеметрией. Производится экспозиция, длительность которой зависит от радиуса излучаемого кругового пространства ледовой поверхности. По окончании экспозиции полученное изображение визуализируется на мониторе в полярной системе координат. На одной лунке съемка ведется с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова. Демонтаж комплекса производится в обратном порядке. После приведения всего оборудования в транспортное состояние комплекс перемещается на следующую точку. В перерыве между ледовыми станциями результаты съемки в цифровом виде записываются на компакт-диске. При необходимости распечатывается твердая копия на принтере.
Энергообеспечение осуществляется переносной электростанцией. Рабочая палатка обогревается электротепловентилятором. Графическая станция размещается в термоблоке. Экспозиции привязаны к топопланам верхней поверхности льда. Результаты гидролокационной съемки даются в виде графических файлов bmp-формата, содержащих изображения результатов сканирования нижней поверхности льда, каждое из которых представляет собой круговое поле, его центром является точка установки гидролокатора. Выступы на нижней поверхности льда обозначаются белыми засветками на общем темно-синем фоне поля. Тень, отбрасываемая выступом при сканировании, отображается темным пятном. На круговом поле введена прямоугольная система координат, такая же, как и используемая при топосъемке верхней поверхности льда на данной станции.
Обработка снимков осуществляется при помощи программы View Polar sonar, которая позволяет определить горизонтальные размеры элементов рельефа нижней поверхности льда и заглубление выступов на ней по длине тени в направлении радиуса сканирования. Измерения в горизонтальной плоскости выполняются в режиме «Линейные размеры», что позволяет определить расстояние между двумя точками с известными координатами при помощи «мыши». Определение величины заглубления выступов происходит аналогичным образом. В режиме «высота киля» после введения поправки на толщину льда при помощи «мыши» отмечается точка конца тени от интересующего выступа. При этом высвечивается радиус сканирования, на котором отмечается точка начала тени. После выбора обеих точек в нижней части экрана в отдельных окнах выводятся координаты и заглубление (в метрах) выбранной точки выступа.
Устройство для реализации известного способа представляет собой гидролокатор кругового обзора, работающий в полярной системе координат PSS-2, и конструктивно состоит из антенны, размещенной на анкерном устройстве, немагнитной штанги с анкерным устройством жестко соединенной с несущим кабель-тросом, поворотной платформы, которая вращает кабель-трос, прецизионного датчика вращения, двухканального приемопередатчика, станции обработки данных на базе портативного компьютера PENTIUM-II. спутниковой навигационной системы GPS, системы электроснабжения. При этом рабочая частота приемопредатчика 115 кГц, длительность импульса посылки 125 мкс, излучаемая мощность 1,5 кВт, ширина диаграммы направленности 0,8 градусов. Устройство также содержит фазовый канал и блок телеметрии, включающий датчики крена, дифферента, заглубления и азимута излучаемого сигнала.
При использовании данного устройства время одной экспозиции в зависимости от радиуса охвата составляет от 10 до 40 минут. Телеметрия позволяет определить пространственную ориентацию антенного модуля, а использование фазового канала дает получить картину видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования). В оптимальных условиях светотеневая картина нижней поверхности ледяного покрова может охватывать площадь до 400-750 м в диаметре при работе из одной лунки.
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные между точками бурения, и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
К недостаткам известного способа могут быть отнесены следующие.
1. Сложная форма нижней поверхности всторошенного льда может приводить к появлению дополнительной погрешности определения осадки киля. Эта погрешность возникает в случае, когда за наиболее выступающей частью киля расположен участок всторошенного льда с большой протяженностью вдоль радиуса сканирования, не только не перекрываемый тенью от выступа, но и ограничивающий ее размеры. Для устранения этой погрешности в известном способе вводится поправка, обусловленная толщиной льда в районе наиболее удаленной от центра сканирования границы тени. Эта поправка определяется по данным механического бурения и прибавляется к максимальной осадке киля, определенной по размерам тени. Поскольку при сканировании охватывается площадь ледяного покрова, в несколько раз превышающая полигон сквозного бурения, возможен вариант, когда данные о толщине льда в районе тени, по результатам бурения отсутствуют. В этом случае в качестве поправки принимают среднюю толщину ровного льда в районе станции. Однако при этом возможно внесение дополнительной погрешности в конечный результат из-за неточного значения поправки на толщину льда. Аналогичный вариант также возможен, когда тень, отбрасываемая килем тороса, выходит за границу кругового снимка.
2. Отсутствует возможность построения модели рельефа, которая очень важна для оценки возможных последствий от сближения дрейфующих торосов и айсбергов с буровыми платформами и морскими газовыми и нефтяными терминалами.
Кроме того, способ имеет ограниченное применение, так как может выполняться только с ледовых полей, на которых могут быть оборудованы станции, заглубление антенного блока не превышает 25 м.
3. Система навигации (визуальное воспроизведение ледового поля) построена по известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации.
Известны также способы и устройства (патент FR №2431137, патент FR №2509869, патент DE №2481791, патенты GB №1418614, GB №1486068, патенты US №4596007, №4603408, №4605140, авторские свидетельства SU №747313, №1060033 [3-12]), представляющие собой гидролокационные системы, предназначенные для топографического представления донной поверхности и нижележащих слоев, и размещенные внутри капсулы, буксируемой в погруженном положении судном-носителем. В принципе, данные системы могут быть использованы для топографического представления погруженной части ледяного поля или айсберга путем ее сканирования гидролокационными сигналами, что позволит исключить погрешность определения осадки киля за счет расширения границы исследуемого участка при использовании параметрических антенн (а.с. SU №1060033, №688104, патент US №4287580 [12-14]). Однако размещение гидролокационных систем в буксируемых капсулах судном-носителем требует сложной системы ориентации и позиционирования для удержания капсулы относительно судна и ледового поля, что практически исключает вариант их использования для съемки рельефа подводной части ледяных полей, представляющих собой торосистые поверхности.
Задачей заявляемого технического решения является повышение достоверности съемки поверхности ледяного покрова.
Поставленная задача решается за счет того, что в способе съемки нижней поверхности ледяного покрова, включающем размещение гидроакустической аппаратуры в водной среде для получения картины видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования), производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, измерения в горизонтальной плоскости в режиме "линейные размеры", определение расстояний между двумя точками с известными координатами, согласно изобретению гидроакустическую аппаратуру размещают на управляемом подвижном морском объекте, приемно-излучающее устройство содержит параметрическую антенну и размещено на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала.
Совокупность новых отличительных признаков, заключающихся в том, что гидроакустическую аппаратуру размещают на управляемом подвижном морском объекте, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала, из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
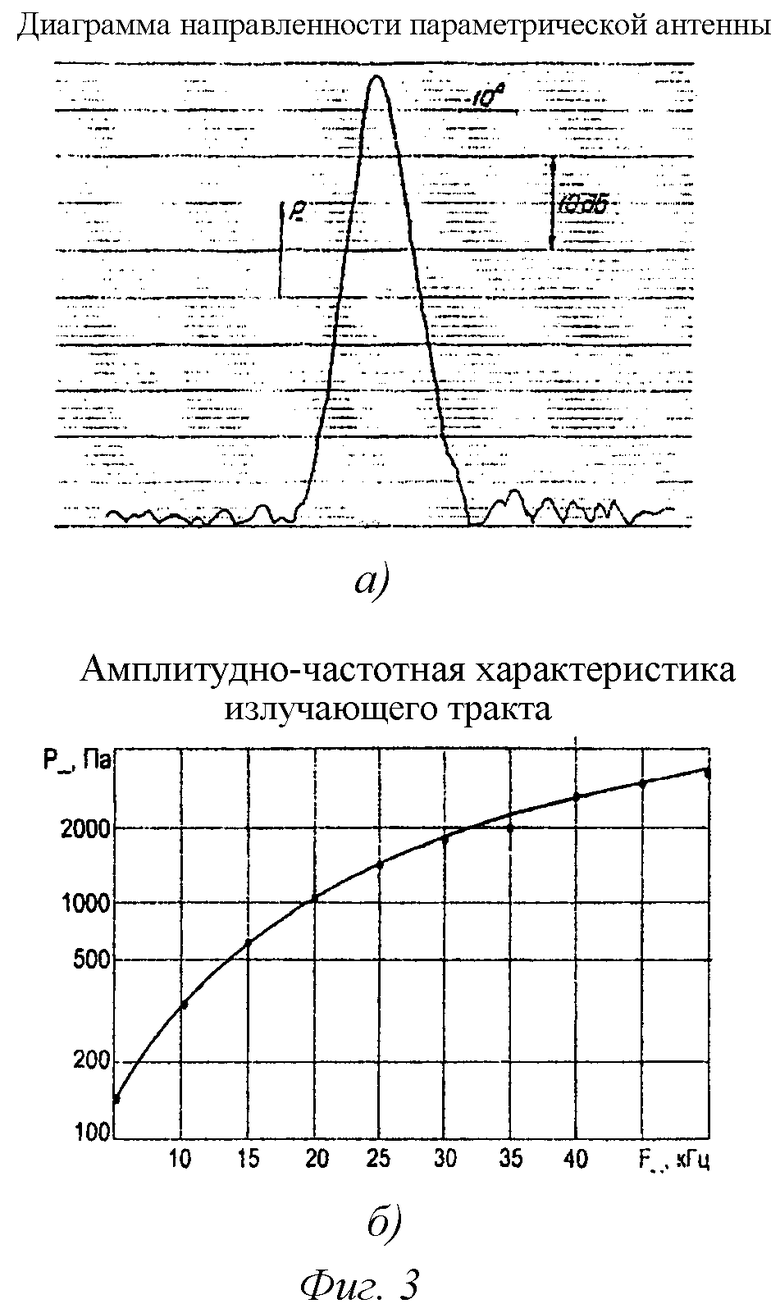
Одним из существенных преимуществ параметрических гидроакустических антенн является их широкополосность. При этом на всех частотах сохраняется одинаковая направленность в режиме излучения. Такие широкополосные источники звука весьма полезны при изучении отражательных свойств ледовых образований. С их помощью, используя одну антенну, можно измерять акустические характеристики практически во всем диапазоне рабочих частот. Исследования могут выполняться оперативно вплоть до измерения амплитудно-частотной характеристики за одну посылку при использовании зондирующих линейных частотно-модулированных импульсов. Последнее обстоятельство особенно важно при непрерывно изменяющихся морских условиях измерений.
В гидролокации величину эхо-сигнала, отраженного от подводного объекта, принято характеризовать силой цели. Измерения частотных зависимостей силы цели с применением параметрических гидроакустических локаторов для исследования отражательных свойств объектов возможно выполнять в широком частотном диапазоне.
Для акустически жестких объектов сферической формы величина силы цели в промежуточной области между релеевским и геометрическим рассеяниями, т.е. в области, где 1<ka<10 (а - радиус), k=2π/λ - волновое число), колеблется, асимптотически приближаясь к своему постоянному значению при ka>>1. Причина этих колебаний, как показали теоретические и экспериментальные исследования, заключается в переизлучении поверхностных и дифрагированных волн, которые вносят свой вклад в процесс формирования эхо-сигнала наряду с зеркальным отражением. Возникшая интерференция между указанными типами волн при достаточной длительности зондирующих импульсов приводит к осцилляциям в частотных зависимостях силы цели. Уровень этих осцилляций, количество, интервал частот между ними определяется физическими параметрами объекта, его геометрическими размерами. Этот факт предполагает возможным использовать в качестве одного из простых и достаточно информативных признаков классификации частотную зависимость силы цели. С целью исследования возможности использования частотных зависимостей силы цели в качестве классификационных признаков были проведены измерения с помощью широкополосного параметрического источника. При этом в излучающем тракте параметрической гидроакустической локационной системы реализован двухканальный метод формирования исходных сигналов со средней частотой накачки 165 кГц. Диапазон разностных частот составлял 5-50 кГц. Перестройка частоты в указанном диапазоне осуществлялась как в течение длительности импульса по линейному закону, так и в режиме медленно меняющейся частоты от импульса к импульсу через 2, 4, 8 посылок. Шаг перестройки разностной частоты составлял 0,2 кГц.
Девиация разностной частоты прямого и отраженного сигнала составила 30-40 кГц. Разница коэффициентов усилителя приемного тракта для каналов прямого и отраженного импульса отличается на величину, равную расстоянию между объектами. Частота биений зависит от девиации частоты излучаемого сигнала и расстояния между объектами. Таким образом, по форме отраженного линейного частотно-модулированного сигнала можно различать одиночную и групповую цели и оценивать расстояние между элементами групповой цели при расположении объектов на расстояниях, меньших длительности зондирующего импульса.
Совпадение огибающих отраженных сигналов от ледяных образований с их частотными зависимостями дает возможность за одну посылку судить о частотных характеристиках отражающих элементов ледяного образования. По характеру частотных зависимостей силы цели элементов ледяного образования можно различать одиночные объекты (кили) от групповых при их расположении на расстоянии, величина которого составляет меньше половины длительности зондирующего импульса.
Сущность предлагаемого технического решения поясняется чертежами.
Фиг.1. Структурная схема формирователя сигналов накачки излучающего тракта. Излучающий тракт состоит из генераторов 1, 2, управляемых напряжением, сигналы синусоидальной формы с частотами соответственно ω1 и ω2, подаются на входы сумматора 3 и коммутатора 4. С выхода сумматора 3 сигнал в виде биений также поступают на коммутатор 4. С выхода коммутатора 4 синусоидальные сигналы или биения через аналоговые умножители 5, 6, управляемые импульсным генератором 7, подаются на регулируемые выходные усилители 8, 9, с выходов которых усиленные до необходимой величины подаются соответственно на выходные разъемы 10, 11.
Импульсный генератор 12, для обеспечения привязки по фазе начала и конца излучения к нулю биений, синхронизируется сигналами генераторов 1 и 2. По приходу запускающего импульса импульсный генератор 12 вырабатывает прямоугольные импульсы, соответствующие уровням ТТЛ, и пилообразный импульс, равный по длительности прямоугольному. Амплитуда пилообразного импульса постоянна и не зависит от его длительности. Кроме того, импульсный генератор 7 генерирует сигнал в виде прямоугольных импульсов со скважностью 2, который подается на специализированную схему контроля 13. Управление частотами генераторов 1 и 2 осуществляется с помощью формирователя управляющих напряжений 14, на вход которого подается либо пилообразный импульс, либо ступенчато изменяющееся напряжение, генерируемое генератором 15 ступенчато-изменяющегося напряжения, работа которого синхронизируется импульсным генератором 7. Для нанесения частотных меток при записи частотных характеристик на ленте самописца служит генератор меток 16, на входы которого подаются опорная частота с кварцевого генератора меток 17 и синусоидальный сигнал с частотой, равной мгновенной разностной частоте, снимаемой с преобразователя частоты 18. Контроль необходимых параметров осуществляется схемой контроля 13, с выхода которой код измеренной величины подается на панель семисегментных светодиодных индикаторов 19.
С выходов формирователя сигналов накачки поступают на широкополосные усилители мощности 20, 21, работающие в импульсном режиме на активную нагрузку 30 Ом и обеспечивающие электрическую мощность 3 кВт, излучаемую антенной 22.
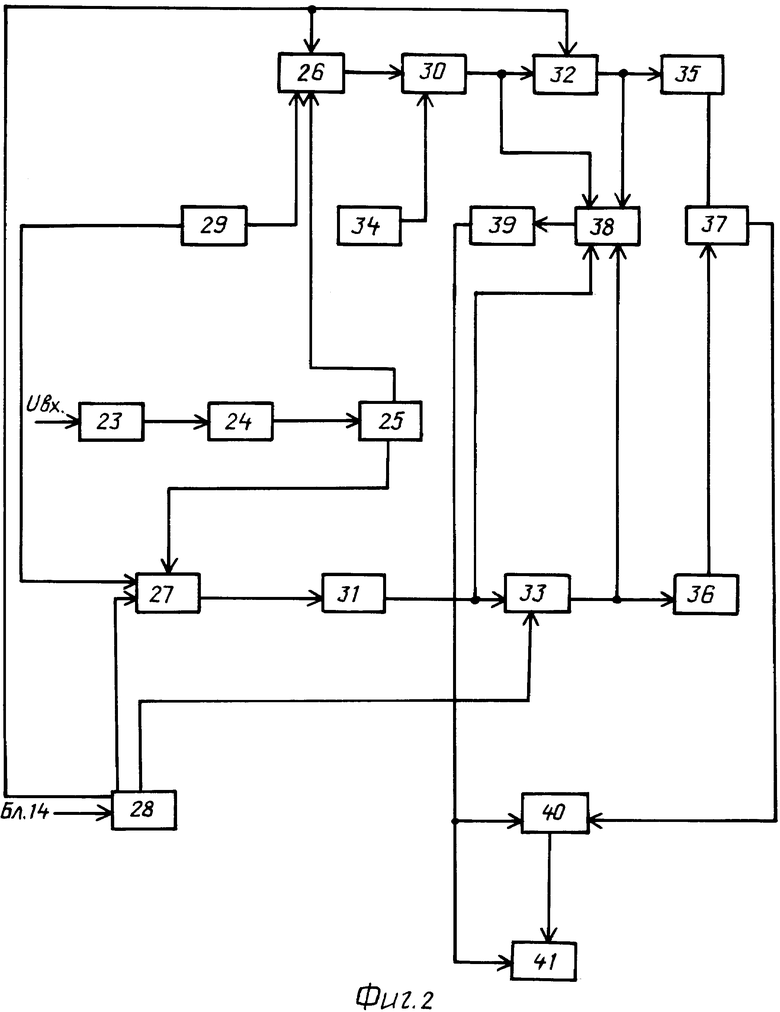
Фиг.2. Блок-схема приемного устройства. Приемное устройство состоит из приемной антенны 23, сумматора 24, предварительного усилителя 25, основных усилителей 26, 27 прямого и отраженного сигналов, соответственно, импульсного устройства 28, блока управления 29, полосовых фильтров 30 и 31 с регулируемой полосой пропускания, пиковых детекторов 32 и 33, блока управления 34 фильтрами 30 и 31, логарифмических усилителей 35, 36, вычитающего устройства 37, коммутатора 38, сумматора 39, регистратора уровня 40, вычислителя 41.
К выходу сумматора 39 (выход 1) подключен необходимый регистратор уровня (осциллограф, магнитофон и т.п.).
Фиг.3. Амплитудно-частотная характеристика излучающего тракта и диаграмма направленности параметрической антенны, соответственно а) и b).
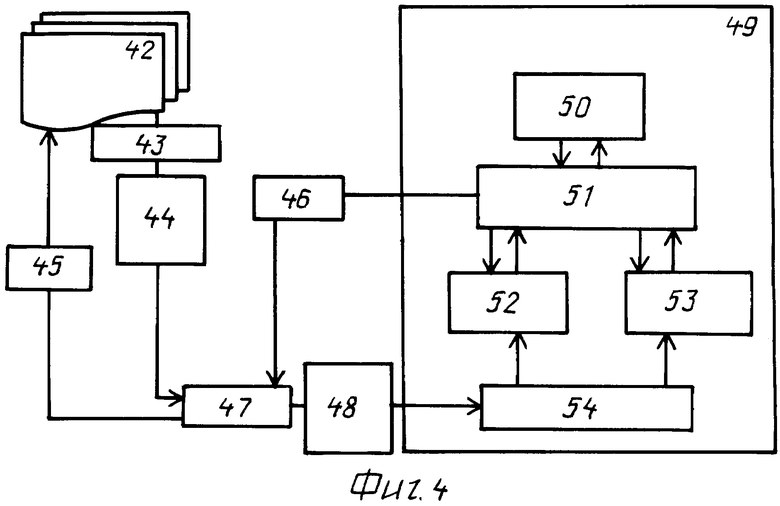
Фиг.4. Блок-схема архитектуры технологии трехмерной визуализации ледяного покрова включает базу геопространственных данных 42, XML-схему 43, ответные файлы XML 44, схемы запроса 45 и 46, Интернет 47, ответные файлы XML 48, браузер 49, включающий HTML-схему 50, узел Java Script 51. структуру векторных и растровых данных в формате SVG 52, интерпретатор структуры VRML 53, схему конвертации XSL-T 54.
В качестве преобразователя накачки используется плоская двухрезонансная многоэлементная, диаметром 0,2 м, антенна мозаичного типа, резонансные частоты первого и второго каналов составляют 150 и 180 кГц соответственно. Ширина характеристики по уровню 0,7 составляет 4 градуса. Антенна набрана из элементов пьезкерамики ЦТС-19 и ЦТСНВ-1.
Измерительный приемник представляет собой двухканальное устройство, снабженное фильтром, стробирующим и решающим устройствами. Принятые гидрофоном прямые (излученные антенной) и отраженные целью сигналы поступают на входной фильтр нижних частот, который исключает попадание высокочастотных составляющих сигналов накачки в последующие каскады. Прошедшие через фильтр нижних частот сигналы разностной частоты усиливаются предварительным усилителем 25 и поступают на входы основных усилителей прямого 26 и отраженного 27 сигналов, в которых осуществляется временная селекция прямого и отраженного сигналов и усиление их до необходимых уровней. Работой стробирующих каскадов основных усилителей 26 и 27 управляет импульсное устройство 28, которое формирует временные ворота для прямого и отраженного сигналов. Синхронизация импульсного устройства осуществляется формирователем 14. Установка коэффициентов усиления основных усилителей осуществляется кодом, формируемым в блоке управления 29. С выходов основных усилителей 26 и 27 через полосовые фильтры 30 и 31 с регулируемой полосой пропускания сигналы с каналов для прямого и отраженного сигналов поступают на пиковые детекторы 32, 33. Регулировка полосы пропускания путем коммутации фильтров верхних и нижних частот по обоим каналам осуществляется блоком управления 34 полосовыми фильтрами 30 и 31. Пиковые детекторы 32 и 33 фиксируют уровни напряжения прямого и отраженного сигналов, величины которых логарифмируются логарифмическими усилителями 35, 36 и поступают на вычитающее устройство 37. С вычитающего устройства 37 постоянное напряжение, пропорциональное разности между уровнями прямого и отраженного сигналов, поступает на регистратор уровня 40. Импульсное устройство 28 перед приемом каждой следующей посылки вырабатывает импульс сброса и очищает память пиковых детекторов 32 и 33. Для визуального контроля, анализа, документирования прямого и отраженного сигналов одновременно или поочередно сигналы с выходов каналов прямого и отраженного сигналов, а также с выходов пиковых детекторов 32 и 33 через коммутатор 38 поступают на сумматор 39, выход которого подключен к входу вычислительного устройства 41, второй вход которого соединен с выходом регистратора уровня 40.
Приемник работает в диапазоне частот 5-50 кГц; уровень шумов, приведенный ко входу по обоим каналам в полосе частот 5-50 кГц, не превышает 4 мкВ; коэффициент усиления каждого канала изменяется в пределах 12-72 дБ. Фильтрами обеспечивается подавление высокочастотных сигналов накачки выше 100 кГц не менее 80 дБ.
Фильтр нижних частот имеет частоты среза 10, 25, 50 кГц; частоты среза фильтра верхних частот 0,2; 2,5; 5; 10 кГц. Максимальная амплитуда входного сигнала в диапазоне рабочих частот составляет не более 1 В.
Ввиду того, что характер чередований максимумов и минимумов, а также абсолютные значения силы цели и интервал частот между минимальными и максимальными значениями силы цели в данном диапазоне частот являются различными, то это позволяет различать эти объекты по их частотным характеристикам, а также оценивать размер этих сфер по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях (Клей К., Медвин Г. Акустическая океанография. Основы и применения. - М.: Мир, 1980, 580 с.).
Способ реализуется следующим образом.
Гидроакустическая аппаратура устанавливается на управляемый подвижный аппарат.
Приемно-излучающее устройство устанавливается на поворотную платформу, имеющую три степени свободы, что позволяет осуществлять гидролокационное облучение ледового образования под разными углами и вдоль вертикальных и горизонтальных плоскостей ледового образования.
Первоначально ледовое образование (дрейфующее ледяное поле) обследуется вдоль периметра дрейфующего ледового образования при нахождении управляемого подвижного аппарата на водной поверхности. Затем управляемый подвижный аппарат погружается. При погружении управляемого подвижного аппарата осуществляется гидролокационная съемка подводной части ледового образования. Далее управляемый подвижный аппарат перемещается вдоль периметра ледяного образования. При этом выполняется гидролокационная съемка боковых стенок ледового образования. При всплытии управляемого подвижного аппарата выполняется гидролокационная съемка другой боковой стенки ледового образования. При этом, если за одно погружение и всплытие на поверхность управляемого подвижного объекта невозможно получить полный обзор боковых сторон ледяного образования, то режим погружения и всплытия повторяют с неохваченных гидролокатором сторон ледяного образования. После выполнения гидролокационной съемки по периметру и глубине погружения приступают к гидролокационной съемке подошвы ледяного образования.
Измерения выполняются с помощью широкополосного параметрического источника с реализацией в излучающем тракте параметрической гидроакустической локационной системы двухканального метода формирования исходных сигналов со средней частотой накачки 165 кГц, с диапазоном разностных частот, равным 5-50 кГц. Перестройка частоты в указанном диапазоне осуществляется как в течение длительности импульса по линейному закону, так и в режиме медленно меняющейся частоты от импульса к импульсу через 2, 4, 8 посылок. Шаг перестройки разностной частоты составляет 0,2 кГц.
При этом разница коэффициентов усилителя приемного тракта для каналов прямого и отраженного импульса отличается на величину, равную расстоянию между килями ледяного образования. Так как частота биений зависит от девиации частоты излучаемого сигнала и расстояния между килями, то по форме отраженного линейного частотно-модулированного сигнала различают одиночную и групповую цели и оценивают расстояние между элементами групповой цели при расположении объектов на расстояниях, меньших длительности зондирующего импульса.
Совпадение огибающих отраженных сигналов от ледяных образований с их частотными зависимостями дает возможность за одну посылку судить о частотных характеристиках отражающих элементов ледяного образования. По характеру частотных зависимостей силы цели элементов ледяного образования, можно различать одиночные объекты (кили) от групповых при их расположении на расстоянии, меньшем половины длительности зондирующего импульса.
Полученные изображения ледяного образования визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования верхней и нижней поверхности льда. Съемку выполняют с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова.
Далее выполняют картографическое построение ледяного образования с учетом таких факторов, как вид генерализуемого объекта, степень извилистости линии на мониторе, степень уменьшения генерализуемого объекта.
При этом выполняют следующие операции:
- сегментацию-разделение линейного объекта по геометрическим показателям (кривизна, фрактальная размерность, фрактальный множитель);
- упрощения путем уменьшения количества точек линии;
- сглаживания путем уменьшения кривизны линии;
- смещения части линии или некоторых точек линии;
- утрирования, заключающегося в утверждении или исключении отдельных элементов, не выражающихся в уменьшенном масштабе карты.
При этом полученная кривая или сигнал подвергается всплеск-преобразованию в соответствии с зависимостью [Берлянт A.M., Бусин О.Р., Собчук Т.В. Картографическая генерализация и теория фракталов. М.: МГУ им. Ломоносова - 1998. - 136 с.; с.96-112]:

где звездочка означает комплексное сопряжение,
а12g((х-b) a) - семейство анализирующих всплеск-функций,
b - операция сдвига,
а - операция растяжения,
Tg(a, b) - коэффициенты всплеск-разложения.
По заданному масштабу (разрешению) карты определяется генерализованная кривая (сигнал) в соответствии с зависимостью
где Тg(a, b) - подмножество множества коэффициентов Тg(а, b), для которых а меньше заданного масштаба (разрешения) карты.
Всплеск-преобразование дает более подробную информацию о сигнале, чем стандартный анализ Фурье, используемый в известных способах. Интегральное всплеск-преобразование дает одновременно локальную информацию о сигнале и его преобразованиях. Всплесковые ряды очень удобны для вычислений, поскольку количество операций, необходимых для вычисления коэффициентов разложения, так же как и количество операций для восстановления функции по ее всплесковым коэффициентам, пропорциональны количеству отсчетов сигнала.
Посредством коэффициентов всплеск-преобразования разделяют кривые, характеризующие конфигурацию килей и торосистых поверхностей, а также общую поверхность на области с различной сложностью, что дает иерархическое многомасштабное представление анализируемого сигнала и обеспечивает эффективные геометрические преобразования на выбранных уровнях точности, быструю классификацию данных, быстрое отображение и мультиразрешающий рисунок ледяной поверхности.
При визуализации требуемой области пространства ледяного образования данные для VRML интерпретатора 53 (фиг.4) формируются в оперативной памяти компьютера вычислительного устройства 41 с последующей загрузкой в интерпретатор 53. Для чего в загрузочный VRML файл включен узел JavaScript 51, функции которого контролируют область видимого пространства. Программными инструментами для картографической визуализации служат структуры данных в формате SVG 52, который поддерживает векторные и растровые данные. Отображение в браузере 49 данных в формате SVG осуществляется интерпретатором декларативного языка SVG. Данные в структуре SVG формируются аналогично формированию данных в формате VRML. На основе данных в структуре XML 48 (геопространственная информация), получаемых от базы данных по запросу, проводится конвертация в памяти браузера в структуру SVG с помощью схемы конвертации XSLT-T 54. Для одновременного представления геопространственных данных в двумерном и трехмерном представлении осуществляется поддержка синхронизации навигации по той и другой сцене. На картографической сцене отображается прямоугольник, соответствующий текущей области пространства, данные о которой загружены в память интерпретатора VRML 53. Синхронизация со стороны SVG осуществляется на основе функций JavaScript, встроенных в структуры SVG 52 и HTML 50. Так как синхронизацию со стороны VRML осуществить сложнее, то в загрузочный файл VRML включен узел JavaScript с навигационными функциями, не позволяющими трехмерному изображению выходить за рамки окна зрения и постоянно отслеживающими координаты окна зрения. Эти координаты служат необходимой информацией для синхронизации с картографической сценой, которая возможна с использованием таймера структуры HTML 50. Картографическая сцена содержит также береговую линию и объекты хозяйственной деятельности (морские терминалы), находящиеся в зоне ледовых исследований.
Система навигации построена с использованием альтернативного по отношению известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации. В предлагаемой технологии точка наблюдения находится постоянно в центре окна наблюдения и визуализируется небольшим трехгранником осей, а начало трехгранника всегда является центром вращения изображения и при навигации сцена перемещается относительно этого центра.
Предлагаемый способ дает возможность получить картину видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования).
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные по всей поверхности и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
Промышленная реализация предлагаемого технического решения сложности не представляет, так как предлагаемый способ может быть реализован на серийно выпускаемой аппаратуре.
Источники информации
1. Гудoшникoв Ю.П., Козлов Д.Н., Кубышкин Н.В. Водолазные исследования торосов и стамух в Баренцевом море в 2003 г. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе СПб. 2004. Труды ААНИИ. Том 449, с.238-246.
2. Гидролокационная съемка нижней поверхности ледяного покрова / Зубакин Г.К., Криницкий П.И., Гудошников Ю.П. и др. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе, СПб. 2004. Труды ААНИИ. Том 449, с.229-237.
3. Патент FR №2431137.
4. Патент FR №2509869.
5. Патент DE №2481791.
6. Патент GB №1418614.
7. Патент GВ №1486068.
8. Патент US №4596007.
9. Патент US №4603408.
10. Патент US №4605140.
11. A.с. SU №747313.
12. A.с. SU №1060033.
13. A.с. SU №688104.
14. Патент US №4287580.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА | 2013 |
|
RU2549683C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН | 2010 |
|
RU2435136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| Устройство для съемки подводной поверхности айсберга | 2021 |
|
RU2771434C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА И УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА | 2014 |
|
RU2552753C1 |
| СПОСОБ СОСТАВЛЕНИЯ ЛЕДОВЫХ КАРТ | 2010 |
|
RU2449245C2 |

Изобретение относится к области гидролокации и может быть использовано при съемке нижней поверхности ледяного покрова. Способ включает размещение гидроакустической аппаратуры в водной среде для получения картины видимой части исследуемого объекта, производство экспозиций, которые привязаны к топопланам верхней поверхности льда, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов. Съемку осуществляют с нескольких горизонтов. Гидроакустическую аппаратуру размещают на управляемом подвижном морском объекте, приемно-излучающее устройство, размещают на поворотной платформе, имеющей три степени свободы. Изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам. Оценивают размер этих секторов и расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса. Технический результат: повышение достоверности съемки нижней поверхности ледяного покрова. 4 ил.
Способ съемки нижней поверхности ледяного покрова, включающий размещение гидроакустической антенны, приемно-излучающего устройства в водной среде для получения картины видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования), производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, отличающийся тем, что гидроакустическую антенну, приемно-излучающее устройство, выполненное в виде гидрофона, размещают на управляемом подвижном морском объекте, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала.
| Гидролокационная съемка нижней поверхности ледяного покрова | |||
| Зубакин Г.К., Криницкий П.И., Гудошников Ю.П | |||
| и др | |||
| Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе | |||
| - СПб., 2004, Труды ААНИИ, т.449, с.229-237 | |||
| Клей К., Медвин Г | |||
| Акустическая океанография | |||
| Основы и применения | |||
| - М.: Мир, |

