Настоящее изобретение относится в одном своем аспекте к игрушечному конструктору робототехники, включающему в себя блок управления робототехникой, в котором блок управления робототехникой содержит: корпус с соединительными элементами, сконфигурированными для разъемного соединения блока управления робототехникой с взаимодействующими элементами игрушечного конструктора; процессор, содержащий запрограммированные инструкции; и множество портов ввода/вывода, сконфигурированных для связи с процессором.
Уровень техники
Игрушечные конструкторы, содержащие контроллеры робототехники для использования при конструировании игрушечных роботов с множеством функций, обеспечивают высоко интерактивный и стимулирующий игровой опыт для пользователя, в частности для детей. Контроллеры робототехники, когда они интегрированы в модель игрушечной конструкции с поддержкой движения, в частности, в сочетании с подходящими периферийными устройствами, такими как исполнительные механизмы и/или датчики, позволяют "оживлять" модель, чтобы выполнять запрограммированные или даже автономные функции. Проектирование, конструирование и программирование такого робота является сложной задачей, которая, среди прочего, может стимулировать приобретение познавательного опыта пользователем в игровой форме.
Тем не менее, чтобы успешно погрузить пользователя в задачу, важно облегчить интуитивное понимание различных этапов процесса конструирования и программирования способом, подходящим для широкого круга пользователей, которые могут иметь резко отличающиеся уровни опыта конструирования и программирования.
Поэтому существует потребность в улучшенном контроллере робототехники, например, для использования в наборах для конструирования робототехники и, в частности, для использования в моделях игрушечных конструкций робототехники, которые развивают навыки конструирования и программирования в игровой форме.
В документе US 20170263155 раскрыт элемент конструирования цепей. Упомянутый элемент конструирования имеет сходство со строительным кирпичиком, снабженным различными шипами и отверстиями для взаимного зацепления. Форма и особенности различных специализированных кирпичиков и стыковочных втулок создают возможность для более эффективного конструирования цепей и обучения.
Раскрытие сущности изобретения
Первый аспект изобретения относится к игрушечному конструктору робототехники с блоком управления робототехникой, в котором блок управления робототехникой включает в себя:
- корпус с соединительными элементами, сконфигурированными для разъемного соединения блока управления робототехникой с взаимодействующими элементами игрушечного конструктора;
- процессор, содержащий запрограммированные инструкции;
- множество портов ввода/вывода, сконфигурированных для взаимодействия с процессором; и
- множество отдельных излучателей света, каждый из которых функционирует в соответствии с инструкциями процессора с целью выборочного формирования по меньшей мере двух разных состояний индикатора;
при этом излучатели света расположены в виде двумерной матрицы ортогональных столбцов и строк, причем каждая строка продолжается между первым концом и вторым концом, при этом первые концы строк определяют первый край матрицы, а вторые концы строк определяют второй край матрицы, противоположный первому краю;
каждый из портов ввода/вывода расположен на линии, определяемой одной из строк, и на одном из первого и второго концов упомянутой строки.
Благодаря расположению отдельных излучателей света и портов ввода/вывода на одной линии относительно друг друга, изменение состояния игрушечного конструктора робототехники, в частности, различные отношения между портами ввода/вывода в зависимости от различных конфигураций блока управления робототехникой, могут динамично визуализироваться в гибкой, но однозначной манере. Например, информация о текущем состоянии игрушечного конструктора может быть визуализирована, когда пользователю предлагаются и отображаются соединения периферийных устройств или взаимодействие с внешними устройствами, а также предпринимаются попытки конфигурирования и/или реконфигурирования в процессе конструирования и/или управления сконструированной игрушечной робототехникой. Кроме того, визуализация может каждый раз динамически адаптироваться, чтобы отражать текущее состояние игрушечного конструктора. Тем самым достигается дополнительная улучшенная визуализация состояния различных портов ввода/вывода посредством излучателей света в соответствии с текущей конфигурацией блока управления робототехникой в игрушечном конструкторе робототехники. Расположение матрицы в сочетании с выравниванием по одной линии портов ввода/вывода с ассоциированными излучателями света повышает доступность блока управления робототехникой для его использования в более сложных конструкциях менее опытными пользователями.
Корпус блока управления робототехникой заключает в себе процессор, то есть процессор располагается в корпусе. Тем самым обеспечивается автономность устройства. В предпочтительном варианте осуществления блок управления робототехникой дополнительно содержит в этом же корпусе независимый источник питания, что делает блок управления робототехникой полностью автономным. В то же время, корпус имеет один или несколько соединительных элементов, сконфигурированных для разъемного соединения блока управления робототехникой с взаимодействующими элементами, имеющими соответствующие соединительные элементы. Таким образом, корпус предоставляет соединительные элементы для интеграции блока управления робототехникой с известными элементами игрушечного конструктора, чтобы облегчать приобретение игрового опыта модульного и легко масштабируемого конструирования игрушечной робототехники. Например, взаимодействующие элементы могут представлять собой один или несколько элементов игрушечного конструктора, причем элементы игрушечного конструктора имеют один или несколько соединительных элементов, сконфигурированных для разъемного соединения элементов игрушечного конструктора друг с другом. Другие примеры взаимодействующих элементов могут включать в себя опорную поверхность или периферийное устройство, оснащенное такими соединительными элементами, приспособленными для зацепления с соединительными элементами на блоке управления робототехникой. Таким образом, блок управления робототехникой может быть легко добавлен к модели игрушечного конструктора в качестве составной части или в качестве модификации. Поэтому наличие таких соединительных элементов для соединения блока управления робототехникой с взаимодействующими соединительными элементами других элементов игрушечного конструктора важно с точки зрения его полезности в контексте игрушечного конструктора.
Термин "порт ввода/вывода" относится к порту ввода/вывода. Порты ввода/вывода предназначены для реализации функций робота с помощью периферийных датчиков и/или электродвигателей. Порты ввода/вывода выполнены с возможностью как ввода, так и вывода. Однако при эксплуатации фактическое распределение задач ввода и/или вывода может зависеть, например, от периферийного устройства, подключенного к порту ввода/вывода и конкретной функции робототехники, реализуемой через этот порт ввода/вывода.
Излучатели света имеют макроскопические размеры, как подробно описано ниже. Каждый отдельный излучатель света визуально воспринимается пользователем как отдельный элемент и может избирательно управляться в соответствии с инструкциями процессора. Излучатели света расположены на лицевой стороне корпуса в виде двумерной матрицы ортогональных столбцов и строк. Кроме того, излучатели света выровнены в одну линию с портами ввода/вывода, так что каждый из портов ввода/вывода имеет рядом с собой ассоциированный излучатель света. В наиболее предпочтительном варианте осуществления, порты ввода/вывода расположены в продолжение строк за пределами границ, определенных первым и вторым краями матрицы.
Лицевой стороной может считаться сторона, на которой расположены излучатели света, которые во время эксплуатации могут указывать в любом направлении, например вверх, вниз или вбок. Таким образом, излучатели света видны снаружи корпуса. Термины "вверх" и "вниз" могут быть определены как вертикальные направления, то есть, по существу, параллельные направлению действия силы тяжести. Термин "вбок" может быть определен как направление под углом к вертикальному направлению. Для каждого из портов ввода/вывода ассоциированный излучатель света расположен на краевом участке двумерного расположения излучателей света, смежном с портом ввода/вывода. Ассоциированные излучатели света могут активироваться для предоставления визуального руководства пользователю блока управления робототехникой, например, относительно правильного использования портов ввода/вывода при конструировании усовершенствованной модели робототехники. Это способствует улучшению опыта интерактивного познания, особенно для неопытного пользователя, при конструировании сложной модели игрушечной робототехники.
Как упоминалось выше, излучатели света выровнены по одной линии с портами ввода/вывода таким образом, что каждый из портов ввода/вывода имеет рядом с собой однозначно ассоциируемый излучатель света. В предпочтительном варианте осуществления, это достигается путем размещения ассоциированного излучателя света в пределах соответствующей ширины порта ввода/вывода, если смотреть в направлении вдоль края матрицы. Таким образом, ассоциированные излучатели света легко визуально ассоциируются с их соответствующими портами ввода/вывода. Соответствующая ширина может ограничиваться шириной порта ввода/вывода, если смотреть в направлении вдоль края матрицы, смежного с портом ввода/вывода. Кроме того, ширина порта ввода/вывода может быть отмечена линией рядом с краем матрицы. Таким образом предоставляется дополнительный улучшенный ориентир для неопытного пользователя, чтобы облегчить дальнейшее совершенствование опыта интерактивного познания.
В предпочтительном варианте осуществления, размеры излучателей света соответствуют размерам портов ввода/вывода игрушечного конструктора и разъемам, используемым в таком контексте. Используемые порты ввода/вывода и взаимодействующие разъемы должны быть рассчитаны на ручную сборку и, в частности, должны подходить для использования детьми или неопытными пользователями. Типичные размеры таких портов ввода/вывода могут находиться в диапазоне миллиметров и/или сантиметров. Соответственно, излучатели света, подобно портам ввода/вывода и взаимодействующим разъемам, также имеют макроскопические размеры, адаптированные для использования в контексте прямого взаимодействия с человеком, то есть излучатели света предпочтительно имеют в плоскости матрицы поперечные размеры в диапазоне миллиметров и/или сантиметров. Хотя возможны размеры излучателя света до 0,5 мм, желательным для правильного разрешения и различения отдельных излучателей света и для обеспечения надлежащей ассоциации с соответствующими портами ввода/вывода является минимальный поперечный размер по меньшей мере 1 мм, по меньшей мере 2 мм или по меньшей мере 3 мм или более. Верхний предел размеров излучателей света определяется расположением портов ввода/вывода и может, например, определяться фактической шириной портов ввода/вывода или соответствующей шириной портов ввода/вывода вдоль края рядом с портом ввода/вывода, и/или относительным расстоянием между соседними портами ввода/вывода.
В соответствии с макроскопическими размерами излучателей света, расстояние между строками и столбцами также является макроскопическим. В предпочтительном варианте осуществления, расстояние между строками составляет по меньшей мере 0,5 мм, по меньшей мере 1 мм, по меньшей мере 2 мм, по меньшей мере 3 мм или более. Кроме того, в предпочтительном варианте осуществления расстояние между столбцами составляет по меньшей мере 0,5 мм, по меньшей мере 1 мм, по меньшей мере 2 мм, по меньшей мере 3 мм или более. В некоторых предпочтительных вариантах осуществления изобретения, строки и столбцы расположены равномерно. В предпочтительном варианте осуществления, расстояние между строками одинаково по всей матрице. Кроме того, предпочтительно, чтобы расстояние между столбцами было одинаковым по всей матрице. В предпочтительном варианте осуществления, матрица строк и столбцов представляет собой квадратную сетку, в которой расстояние между строками и столбцами одинаково по всей матрице.
Цель использования макроскопических излучателей света – предоставить пользователю интерактивное руководство при конструировании и создании модели игрушечной робототехники. Макроскопический масштаб и выравнивание отдельных излучателей света в одну линию с портами ввода/вывода также полезно для взаимодействия с пользователем в интерактивных играх, например, в играх типа "Сайман говорит", требующих, например, активации определенного входа или комбинации входов на портах ввода/вывода в соответствии с командами "Саймана", выдаваемыми посредством соответствующих излучателей света. Дополнительный синергетический эффект макроскопического масштаба излучателей света достигается при управлении излучателями света с целью формирования машиночитаемого цифрового кода кодированных данных, касающихся блока управления, при этом машиночитаемый цифровой код представляется в виде визуального шаблона. Как рассматривалось выше, визуальный шаблон может захватываться совместимым внешним устройством. Благодаря макроскопическим размерам излучателей света, формирующих визуальный шаблон, может обеспечиваться надежный захват визуального шаблона внешним устройством с помощью камер обычных мобильных устройств или даже дешевых устройств захвата с низким разрешением. Кроме того, благодаря макроскопическим размерам излучателей света, процесс оптической передачи закодированных данных из блока управления робототехникой на внешнее устройство становится непосредственно доступным для пользователя. Это улучшает опыт интерактивного познания процесса конструирования и синергетически расширяет этот опыт, включая в него функциональную связь с внешними устройствами, взаимодействующими с блоком управления робототехникой.
Взаимодействие между блоком управления робототехникой и его окружением осуществляется таким образом, который непосредственно доступен как в процессе конструирования, так и при последующем управлении и взаимодействии с готовой конструкцией. Прямая и ассоциативная визуализация поддерживает интуитивное понимание взаимодействий между блоком управления робототехникой и окружением. Следовательно, создаются расширенные возможности интерактивной игры и познания по сравнению с блоками управления робототехникой предшествующего уровня техники, которые также имеют порты ввода/вывода и дисплей на лицевой панели, но при этом порты ввода/вывода и дисплей не коррелированы тем же способом, который достигается путем конкретного выравнивания в одну линию портов ввода/вывода со строками и столбцами отдельных излучателей света в соответствии с вариантами осуществления настоящего изобретения.
Визуализация состояния блока управления робототехникой и/или любых связанных с ним периферийных устройств также полезна в целях калибровки любых таких компонентов. Например, калибровка датчиков и/или исполнительных механизмов, в отношении определенного параметра, такого как ориентация, положение, температура, интенсивность, цвет, масштаб и т.п., может быть выполнена и/или подтверждена интуитивно и интерактивно путем визуализации состояния блока управления робототехникой и/или любых связанных с ним периферийных устройств путем сравнения с соответствующим эталоном и осуществления корректировки, если она возможна. Возможно также, что визуализация на первом блоке управления робототехникой может отражать состояние ассоциированного с ним второго блока управления робототехникой, например, в целях калибровки.
В некоторых вариантах осуществления изобретения доступность поддерживается с помощью анимированных световых эффектов, таких как бегущие или мигающие огни, цветовые эффекты и/или любые их комбинации. В некоторых вариантах осуществления, доступность дополнительно поддерживается другими средствами, такими как акустические сигналы/звуки, которые коррелированы с процессом визуальной передачи и которые, кроме того, могут сочетаться с любым из вышеупомянутых визуальных эффектов. Соответствующие акустические сигналы должны подаваться в диапазоне частот, воспринимаемых ухом человека. Тем самым может быть дополнительно улучшен интерактивный опыт познания.
В качестве альтернативы или в дополнение к портам ввода/вывода, которые выровнены в одну линию со строками, конструктор может содержать дополнительные порты ввода/вывода, которые по аналогии с портами ввода/вывода, ассоциированными со строками, ассоциированы со столбцами. Такая ассоциация аналогичным образом достигается путем выравнивания дополнительных портов ввода/вывода в одну линию со столбцами матрицы. По аналогии с изложенным выше, каждый из столбцов продолжается от третьего конца до четвертого конца, причем третий и четвертый концы определяют третий и четвертый края матрицы соответственно. Таким образом, каждый из дополнительных портов ввода/вывода может располагаться на линии, определяемой одним из столбцов и на одном из его третьего и четвертого концов. Кроме того, дополнительные порты ввода/вывода наиболее предпочтительно расположены в продолжение столбцов за пределами границ, определенных третьим и четвертым краями матрицы. Следует отметить, что аналогичные соображения, как и те, которые обсуждались в данном документе в связи с выравниванием в одну линию портов ввода/вывода и строк, также применимы к выравниванию дополнительных портов ввода/вывода в одну линию со столбцами ортогональной матрицы. Поэтому такие соображения, касающиеся обоих вариантов осуществления, включающих в себя такие дополнительные порты ввода/вывода и с их преимуществами, рассматриваются как эквивалентные настоящему раскрытию и не описываются более подробно ниже.
В некоторых предпочтительных вариантах осуществления изобретения, вышеупомянутые преимущества двумерной матричной компоновки отдельных излучателей света по одной линии с портами ввода/вывода, могут дополнительно поддерживаться одним или несколькими из нижеследующих признаков.
В некоторых предпочтительных вариантах осуществления, количество строк при двумерном расположении отдельных излучателей света составляет по меньшей мере три, по меньшей мере пять или по меньшей мере семь. Кроме того, число отдельных излучателей света в каждой строке составляет по меньшей мере три, по меньшей мере пять или по меньшей мере семь. Соответственно, в некоторых вариантах осуществления количество столбцов составляет, по меньшей мере три, по меньшей мере пять или по меньшей мере семь. Верхний предел числа строк и/или столбцов определяется общими размерами установочной поверхности, имеющейся на корпусе для размещения отдельных излучателей света, и макроскопическими размерами отдельных излучателей света. Как правило, количество строк и/или количество столбцов отдельных излучателей света на блоке управления робототехникой не превышает 20, или не превышает 15, или не превышает 12, или не превышает 10.
В некоторых предпочтительных вариантах осуществления изобретения, порты ввода/вывода расположены вдоль по меньшей мере одного края двумерного расположения излучателей света на лицевой стороне корпуса. Порты ввода/вывода выполнены с возможностью подключения совместимых периферийных устройств, таких как электродвигатели, датчики или управляемые пользователем элементы. Таким образом, порты ввода/вывода обеспечивают интерфейс для конфигурируемых пользователем входных и/или выходных сигналов в и из блока управления робототехникой. Порты ввода/вывода могут представлять собой электрические разъемы, оптические разъемы и даже беспроводные порты, которые могут иметь визуальную разметку беспроводного порта ввода/вывода рядом с краем двумерного расположения излучателей света. Каждый из портов ввода/вывода имеет соответствующую ширину порта, если смотреть вдоль края двумерного расположения излучателей света.
Кроме того, в некоторых вариантах осуществления изобретения, по меньшей мере первый порт ввода/вывода расположен на первом конце строки, а второй порт ввода/вывода расположен на втором конце строки. Таким образом, первый и второй порты ввода/вывода расположены на одной и той же линии, определяемой соответствующей строкой, и на каждом конце этой строки.
Кроме того, в некоторых вариантах осуществления изобретения, первая группа первых портов ввода/вывода расположена вдоль первого края матрицы, и/или вторая группа вторых портов ввода/вывода расположена вдоль второго края матрицы. Предпочтительно, пары первого и второго портов ввода/вывода расположены на одних и тех же линиях, определяемых соответствующими строками, и на каждом их конце. Предпочтительно, количество портов ввода/вывода первой группы равно количеству портов ввода/вывода второй группы. Строки ассоциированы по меньшей мере с одним соответствующим портом ввода/вывода, таким как соответствующий первый порт ввода/вывода и/или соответствующий второй порт ввода/вывода. Строки, ассоциированные с портами ввода/вывода, могут перемежаться одной или несколькими дополнительными строками, которые не ассоциированы с конкретными портам ввода/вывода упомянутым выше образом. Это, например, полезно для четкой индикации отношений, таких как физические и/или логические соединения, между соседними портами ввода/вывода или портами ввода/вывода, принадлежащими соседним строкам. Количество строк в матрице в таком случае, как правило, соразмерно кратно количеству портов ввода/вывода или количеству пар первого и второго портов ввода/вывода плюс любая завершающая строка (строки).
Порты ввода/вывода первой группы имеют ширину первого порта, если смотреть в направлении вдоль первого края матрицы. Порты ввода/вывода второй группы имеют ширину второго порта, если смотреть в направлении вдоль второго края матрицы. Таким образом, каждому из портов ввода/вывода первой группы и второй группы может быть присвоена соответствующая ширина порта вдоль первого и второго краев матрицы соответственно. Каждый из портов ввода/вывода первой и второй группы имеет ассоциированный излучатель света, как рассматривалось выше. В предпочтительном варианте осуществления, для каждого из портов ввода/вывода первой и второй группы ассоциированный излучатель света расположен на первом или втором краевом участке матрицы в пределах ширины ассоциированного порта ввода/вывода первой или второй группы, если смотреть в направлении вдоль первого или второго края матрицы. Тем самым достигается хорошая визуальная ассоциация излучателей света с их соответствующими портами ввода/вывода, как также рассматривалось выше.
В некоторых предпочтительных вариантах осуществления блока управления робототехникой, количество портов ввода/вывода первой группы равно количеству портов ввода/вывода второй группы. Тем самым обеспечивается простая симметричная конфигурация компоновки. Симметричная компоновка обеспечивает упрощенную геометрию выравнивания по одной линии для эффективного использования установочной поверхности блока управления робототехникой. Кроме того, благодаря симметричной компоновке достигается визуальное интуитивное согласование портов ввода/вывода с ассоциированными излучателями света. В совокупности это облегчает использование блока управления робототехникой в более сложных конструкциях менее опытными пользователями.
Кроме того, в некоторых вариантах осуществления количество строк равно количеству столбцов. Такое расположение, например, полезно для представления определенных типов визуальных шаблонов или машиночитаемых визуальных кодов, таких как QR-коды.
Кроме того, в некоторых вариантах осуществления излучатели света функционируют в соответствии с инструкциями процессора с целью формирования машиночитаемого кода кодирования данных, касающихся блока управления робототехникой.
Посредством формирования машиночитаемого цифрового кода кодирования данных, касающихся блока управления робототехникой, блок управления робототехникой может передавать информацию о себе и предоставлять такую информацию другим устройствам, машинам, роботам и т.п. Упомянутые другие устройства, машины, роботы или тому подобное могут захватывать машиночитаемый код и декодировать информацию, содержащуюся в закодированных данных, более или менее автоматизированным способом. Таким образом, блок управления робототехникой может напрямую взаимодействовать с такими другими устройствами, машинами, роботами и т.п.
Кроме того, в некоторых вариантах осуществления множество излучателей света может функционировать совместно с целью формирования шаблона, такого как двумерный шаблон. Шаблон может представлять собой шаблон, сконфигурированный для передачи сигналов пользователю и/или адаптированный для передачи сигналов внешнему устройству. Машиночитаемый код, адаптированный для передачи сигналов внешнему устройству, может быть представлен в виде двумерного шаблона, определяемого комбинацией любых из описанных здесь оптических параметров излучателей света, таких как цвет и интенсивность, с использованием цифрового двоичного или многоуровневого дискретного представления для формирования любого подходящего кода, такого как QR-код, штрих-код или тому подобное. Машиночитаемый код кодируется в цифровом формате, предпочтительно в соответствии со стандартным протоколом. Таким образом, блок управления робототехникой выполнен с возможностью представления данных для эффективной передачи информации, содержащейся в данных. Ниже приведены примеры данных, касающихся блока управления робототехникой: данные о состоянии; данные о конфигурации; идентификационные данные; инструкции блока управления робототехникой другим устройствам и любые данные, относящиеся к таким инструкциям; индикаторы состояния и инструкции по настройке для пользователя, например, при конструировании и/или эксплуатации игрушечного робота, созданного с помощью конструктора.
В предпочтительном варианте осуществления, шаблон адаптирован для оптического распознавания внешним устройством, вследствие чего создается машиночитаемый код, который может распознаваться внешним устройством путем простого направления оптического устройства захвата, такого как камера или линейный сканер внешнего устройства, на излучатели света блока управления робототехникой. Внешнее устройство может оснащаться оптическим устройством ввода, таким как оптический датчик формирования изображения, камера, система машинного зрения или оптическое сканирующее устройство, и может дополнительно содержать ассоциированный программный модуль для обработки оптического ввода, полученного от устройства оптического ввода, при этом программный модуль дополнительно приспособлен для интерпретации обработанного оптического ввода и/или для распознавания предопределенных визуальных шаблонов в оптическом вводе, захваченных устройством оптического ввода. Посредством предоставления визуального шаблона, адаптированного для оптического распознавания внешним устройством, сконфигурированным вышеупомянутым образом, облегчается эффективное взаимодействие с таким внешним устройством.
Кроме того, в некоторых вариантах осуществления, излучатели света выполнены с возможностью формирования временной последовательности состояний индикатора. При этом может создаваться и представляться пользователю анимированная индикация, например, посредством мигания, бегущих огней или других зависящих от времени визуальных эффектов. Временная последовательность также может объединяться с любым из других вышеупомянутых оптических параметров для кодирования конкретного состояния. Например, красный цвет в сочетании с (быстрым) мигающим светом может означать предупреждение, тогда как зеленый цвет в сочетании с (медленно) мигающим светом может указывать на состояние ожидания/готовности. Опять же, несколько излучателей света могут объединяться для формирования временной последовательности шаблонов. Кроме того, временная последовательность состояний индикатора может использоваться для кодирования машиночитаемого цифрового кода, например, зависящего от времени двумерного шаблона. В то время как первое представляет собой видимый для пользователя сигнал, последнее может представлять собой чисто машиночитаемое кодирование данных для передачи. Следовательно, для эффективного взаимодействия с пользователем и/или внешними устройствами с помощью визуальных шаблонов доступно большое разнообразие кодов.
Кроме того, в некоторых вариантах осуществления излучатели света представляют собой излучатели, выполненные с возможностью излучения по меньшей мере видимого света. Машиночитаемый код предпочтительно представляет собой визуальный шаблон, благодаря чему облегчается интуитивное взаимодействие пользователя с блоком управления робототехникой. Используемый здесь термин "визуальный" относится к свойству быть видимым для человека. Таким образом, "визуальный шаблон" относится к шаблону, который сконфигурирован таким образом, чтобы восприниматься человеческим глазом. Термин "видимый" относится к свету в видимой части электромагнитного спектра, обычно охватывающей спектральный диапазон с длинами волн от 750 до 400 нм. При представлении машиночитаемого цифрового кода в виде визуального шаблона на лицевой стороне корпуса, передача непосредственно видна пользователю, что позволяет пользователю отслеживать активность блока управления робототехникой, например, в процессе взаимодействия блока управления робототехникой с другими устройствами. Наблюдая за процессом взаимодействия, пользователь также может вмешиваться в него, например, устанавливать соединение, влиять на поток связи, вводить данные и/или завершать связь. Таким образом, пользователь может как отслеживать, так и контролировать непосредственное взаимодействие блока управления робототехникой с другими устройствами.
Таким образом, машинно-управляемое взаимодействие между блоком управления робототехникой и его окружением осуществляется способом, который непосредственно доступен для пользователя как в процессе конструирования, так и во время последующей проверки и взаимодействия с готовой конструкцией. Прямая и ассоциативная визуализация поддерживает интуитивное понимание взаимодействия между блоком управления робототехникой и окружением. Таким образом обеспечивается особенно наглядное, интуитивное и интерактивное обучение и приобретение игрового опыта.
Кроме того, в некоторых вариантах осуществления, излучатели света представляют собой излучатели света, которые дополнительно приспособлены для излучения инфракрасного, предпочтительно ближнего инфракрасного света и/или ультрафиолетового света. Инфракрасный и/или ультрафиолетовый диапазоны спектра особенно полезны для добавления так называемых невидимых каналов, например, для передачи чисто машиночитаемых данных, к так называемому видимому каналу, который в основном предназначен для пользователя. Поэтому инфракрасный и/или ультрафиолетовый диапазоны спектра особенно полезны для передачи больших объемов данных с более высокими скоростями, чем было бы доступно для пользователя. В некоторых предпочтительных вариантах осуществления невидимые каналы объединяются с видимыми каналами, чтобы мультиплексировать машиночитаемый код с видимыми сигналами, предназначенными для пользователя. Таким образом, видимый канал может, например, использоваться для помощи пользователю, для визуализации обмена данными между блоком управления робототехникой и внешним устройством и/или для передачи основных объемов данных, тогда как невидимый канал может использоваться в качестве параллельной линии для быстрого взаимодействия и/или передачи дополнительных (возможно, больших) объемов данных.
Кроме того, в некоторых вариантах осуществления излучатели света управляются с целью формирования машиночитаемого кода кодирования данных, идентифицирующих блок управления робототехникой, данных, относящихся к внутреннему состоянию блока управления робототехникой, данных, относящихся к программе, хранящейся в блоке управления робототехникой, и/или данных, относящихся к программе, активированной в процессоре блока управления робототехникой, и/или других подобных данных. Такие данные, например, полезны для установления и осуществления машинного общения и дополнительно облегчают расширенное взаимодействие с другими устройствами, машинами, роботами и т.п. Кроме того, данные могут быть данными, полезными для передачи инструкций для активации запрограммированных инструкций, хранящихся в приемном устройстве, для передачи конкретной конфигурации блока управления робототехникой и периферийных компонентов, которыми он управляет, для извещения о доступности для выполнения конкретных запрограммированных инструкций, хранящихся в блоке управления робототехникой и/или индикации любых состояний ошибки.
Кроме того, в некоторых вариантах осуществления излучатели света способны формировать машиночитаемый код кодирования инструкций по взаимодействию блока управления робототехникой и внешнего устройства. Таким образом, блок управления робототехникой выполнен с возможностью передачи внешнему устройству инструкций по взаимодействию с блоком управления робототехникой. Блок управления робототехникой и инструкции по взаимодействию могут быть адаптированы для взаимодействия с одним или несколькими внешними устройствами. Таким образом, блок управления робототехникой может взаимодействовать с одним или несколькими внешними устройствами, причем одно или несколько внешних устройств могут быть мобильными устройствами и/или другими блоками управления робототехникой. Примером мобильного устройства может быть мобильный телефон, планшетный компьютер, портативный компьютер и/или игровой контроллер. Другой блок управления робототехникой может быть, например, блоком управления робототехникой, который совместим или того же типа, что и блок управления робототехникой игрушечного конструктора робототехники. Другой блок управления робототехникой может быть даже сконфигурирован для имитации любого из мобильных устройств, взаимодействующих с блоком управления робототехникой игрушечного конструктора.
Преимущественно, такие инструкции предназначены для инициирования или иного воздействия на дополнительную линию связи между блоком управления робототехникой и внешним устройством в дополнение к оптической линии связи, основанной на оптической передаче машиночитаемых кодов. Преимущественно, такая дополнительная линия связи конфигурируется для двунаправленной связи между блоком управления робототехникой и внешним устройством, тем самым поддерживая и усиливая прямое взаимодействие между блоком управления робототехникой и внешним устройством. Предпочтительными примерами дополнительной линии связи являются любые формы беспроводной линии связи, такие как прямая беспроводная линия связи, например, инфракрасная или радиочастотная линия, или беспроводная линия связи посредством шины данных или цифровой сети, например, беспроводная сеть на основе протокола TCP/IP или других подходящих стандартов и инфраструктур. Кроме того, преимущественно из соображений модульности, эффективности и/или прослеживаемости, взаимодействие через дополнительную линию связи соответствует стандартному протоколу, такому, например, как протокол, описанный в европейском патенте EP 2341993 B1.
В некоторых вариантах осуществления оптическая связь посредством машиночитаемых цифровых кодов, представляемых в виде визуального шаблона, предназначена только для "установления контакта", в то время как оптическая связь выполнена с возможностью инициации дополнительной связи между блоком управления робототехникой и внешним устройством интуитивно понятным и интерактивным способом. Затем взаимодействие между блоком управления робототехникой и внешним устройством может быть перенесено в дополнительную линию связи. Это облегчает интуитивно понятный и интерактивный способ создания усовершенствованной модели робототехники и последующего вовлечения улучшенной модели в игру. После установления связи, взаимодействие между внешним устройством и блоком управления робототехникой через дополнительную связь может быть визуализировано или иным образом смоделировано внешним устройством понятным для пользователя способом.
Кроме того, в некоторых вариантах осуществления, инструкции по взаимодействию включают в себя инструкции по сопряжению, инструкции по установлению беспроводной связи между внешним устройством и блоком управления робототехникой и/или инструкции по выполнению запрограммированных инструкций внешним устройством и/или инструкции по внутренней двусторонней связи. Таким образом, блок управления робототехникой может предоставлять информацию, необходимую для связи и иного взаимодействия с ним. Блок управления робототехникой также может иметь инструкции по непосредственному управлению внешним устройством, таким как другой блок управления робототехникой. Блок управления робототехникой может даже предлагать совместимому внешнему устройству извлечь любую необходимую инструкцию и выполнить эти инструкции. Внешнее устройство может извлекать такие запрограммированные инструкции из своего собственного средства хранения, из подключенного или иного хранилища и/или из сетевого источника. Таким образом, надежное автоматическое или полуавтоматическое взаимодействие может инициироваться блоком управления робототехникой, но стабильно поддерживаться внешним устройством. Это обеспечивает гибкость в выборе внешних устройств. Таким образом, наглядное интерактивное взаимодействие достигается без перегрузки блока управления робототехникой информацией о совместимости, в то же время предоставляя для удобства пользователя большее разнообразие совместимых внешних устройств.
Как упоминалось выше, отдельные излучатели света представляют собой отдельные элементы, имеющие макроскопические размеры. Отдельные излучатели света в предпочтительном варианте осуществления могут представлять собой светодиоды. Отдельные излучатели света могут, например, быть отдельными светодиодами или излучателями, основанными на светодиодах, или макроскопическими элементами, такими как элементы игрушечного конструктора, которые освещаются с помощью светодиодов.
В некоторых предпочтительных вариантах осуществления изобретения, излучатели света имеют по меньшей мере состояния "ВКЛ" и "ВЫКЛ". Состояния "ВКЛ" и "ВЫКЛ" могут реализовываться простым включением или выключением подаваемого на излучатель света питания, соответственно. Альтернативно, состояние "ВКЛ" и состояние "ВЫКЛ" также могут реализовываться в виде существенно отличающейся интенсивности света, излучаемого излучателем, при этом состояние "ВКЛ" может быть определено как излучение, интенсивность которого превышает верхний порог интенсивности, а состояние "ВЫКЛ" может быть определено как излучение с интенсивностью ниже нижнего порога интенсивности. В более общем смысле, различные состояния отдельных излучателей света, такие как вышеупомянутые состояние "ВКЛ" и состояние "ВЫКЛ", могут реализовываться с помощью различных характеристик излучения, которые отличаются оптическими параметрами излучаемого света, такими как различные цвета, диапазоны длин волн, интенсивности и/или яркости и любые их одновременные и/или последовательные комбинации. Кроме того, каждый из отдельных излучателей света может пребывать более чем в двух разных состояниях, выраженных с использованием любого из вышеупомянутых оптических параметров или их комбинаций/последовательностей. Путем объединения нескольких отдельных излучателей света в набор может быть закодирована еще более сложная информация. Набор может включать в себя любое целое количество из множества отдельных излучателей света, например, по меньшей мере два, по меньшей мере три, по меньшей мере четыре, по меньшей мере шесть или по меньшей мере десять, вплоть до общего количества отдельных излучателей света в матрице, расположенной на лицевой стороне корпуса блока управления робототехникой. Благодаря использованию отдельных излучателей света, обеспечивается надежное разграничение отдельных элементов набора, что позволяет надежно декодировать информацию, выраженную данным набором. Различные состояния могут визуализировать соответствующее состояние, чтобы указывать пользователю конкретное состояние самого блока управления робототехникой, блока управления робототехникой в текущем контексте игрушечного конструктора робототехники и/или блока управления робототехникой по отношению к любым другим компонентам или устройствам. В дополнение к этому, различные состояния также могут считываться машиной с использованием способов оптического захвата и обнаружения, позволяющих различать различные состояния с точки зрения различных оптических параметров, используемых для выражения различных состояний. Таким образом, огромное количество информации может быть визуализировано и выражено в виде машиночитаемого кода и передано с помощью отдельных излучателей света. Например, различные состояния могут быть адаптированы для считывания с помощью мобильного устройства или другого внешнего устройства, такого как мобильный телефон, планшетный компьютер, дополнительный блок управления робототехникой и т.п., с использованием предварительно заданной цветовой палитры и/или схемы сочетаний цветов, при этом внешнее устройство содержит средство захвата, процессор и запрограммированные инструкции для захвата и декодирования такой кодированной цветом информации.
Кроме того, в некоторых вариантах осуществления, излучатели света выполнены с возможностью визуализации графа, отображающего соединения между двумя или более портами ввода/вывода, графа, отображающего соединения между одним или несколькими портами ввода/вывода и одним или несколькими взаимодействующими периферийными устройствами, и/или графа, отображающего ввод, полученный на одном или нескольких портах ввода/вывода. Таким образом, излучатели света могут функционировать в соответствии с инструкциями процессора для визуализации любых отношений между входом в и/или выходом из блока управления робототехникой, которые предоставляются через соответствующие порты ввода/вывода, а также любой связанной информации, например, графа со значениям, считанными с датчика, подключенного к блоку управления робототехникой, или графа, отображающего синхронизацию выходов для управления электродвигателем через два подключенных порта ввода/вывода. Представленные соединения могут относиться или даже могут напрямую отражать уже установленные соединения, тем самым давая интуитивно понятное представление о функциях, поддерживаемых периферийными устройствами и управляемых блоком управления робототехникой в конкретной конструкции. Визуализация уже установленных связей также полезна для поддержания и совершенствования опыта познания. В некоторых предпочтительных вариантах осуществления визуализированные соединения, кроме того, относятся к соединениям, которые должны быть сформированы, например, чтобы довести до конца данную модель, используя блок управления робототехникой. Таким образом, при создании данной модели может предоставляться интуитивно понятное руководство. Таким образом менее опытному пользователю может предоставляться помощь при создании более сложной модели, тем самым усиливая обучающий эффект в процессе усвоения опыта. В предпочтительном варианте осуществления, визуализация соединения, которое должно быть выполнено, подсказывается вводом.
Упомянутый ввод может осуществляться в ответ на пользовательский ввод и/или как часть управляемой процедуры подключения периферийных устройств к блоку управления робототехникой. Пример такого ввода может представлять собой сигнал, генерируемый внешним устройством в качестве этапа интерактивного плана создания, выполняемого на внешнем устройстве, и передаваемый блоку управления робототехникой. Другим примером может быть сигнал, генерируемый периферийным устройством, которое активируется для самоидентификации и передачи такой информации. В ответ на такой ввод, блок управления робототехникой может указать один или несколько портов ввода/вывода, которые доступны для соединения, которое должно быть сформировано, например, для подключения идентифицированного периферийного устройства. Таким образом совершенствуется интерактивный опыт конструирования, чтобы позволить, например, менее опытным пользователям создавать сложные модели.
Кроме того, в некоторых вариантах осуществления блока управления робототехникой, матрица излучателей света сконфигурирована для визуализации графа, представляющего собой ввод, принятый через один или несколько портов ввода/вывода. В частности, излучатели света могут функционировать в соответствии с инструкциями процессора, чтобы визуализировать граф, представляющий сбой ввод, принятый через один или несколько портов ввода/вывода. В предпочтительном варианте осуществления, граф визуализируется таким образом, чтобы давать представление о величине сигнала, поступающего в качестве ввода на один или несколько портов ввода/вывода. Таким образом обеспечивается интуитивно понятная визуализация ввода, как его "видит" блок управления робототехникой, что позволяет пользователю следить за взаимодействием модели с блоком управления робототехникой и окружением. Граф может дополнительно побуждать пользователя или внешнее устройство, наблюдающего за матрицей излучателей света, взаимодействовать с блоком управления робототехникой.
Кроме того, нижеследующие варианты осуществления блока управления робототехникой придают полезные функции, облегчающие взаимодействие между блоком управления робототехникой и взаимодействующими/совместимыми периферийными устройствами. В предпочтительном варианте осуществления, упомянутые интерфейсы портов ввода/вывода имеют модульное исполнение, обеспечивающее взаимозаменяемое соединение совместимых периферийных устройств с портами ввода/вывода. Тем самым достигается универсальность соединения портов ввода/вывода с совместимыми устройствами. Это особенно полезно при создании сложных систем управления робототехникой интуитивно понятным способом, что расширяет опыт творческого конструирования. В некоторых вариантах осуществления, порты ввода/вывода преимущественно сконфигурированы в виде интерфейсов для взаимодействия с периферийными устройствами, такими как датчики, электродвигатели, генераторы и/или источники питания. Кроме того, в предпочтительном варианте осуществления, порты ввода/вывода содержат один или несколько цифровых интерфейсов. Кроме того, в предпочтительном варианте осуществления, порты ввода/вывода содержат один или несколько аналоговых интерфейсов. Кроме того, в предпочтительном варианте осуществления, порты ввода/вывода сконфигурированы для проводной и/или беспроводной связи с периферийными устройствами.
Кроме того, в некоторых вариантах осуществления, система дополнительно содержит один или несколько элементов игрушечного конструктора, причем каждый элемент игрушечного конструктора имеет один или несколько соединительных элементов, сконфигурированных для разъемного соединения элементов игрушечного конструктора с блоком управления робототехникой. Таким образом, модель игрушечной конструкции, собранная из конструктора, может быть воплощена в жизнь с особыми преимуществами интерактивного обучения и игрового опыта, как уже обсуждалось выше в контексте блока управления робототехникой.
Кроме того, в некоторых вариантах осуществления, конструктор дополнительно включает в себя внешнее устройство, причем внешнее устройство содержит:
- устройство захвата, выполненное с возможностью захвата машиночитаемого кода, сформированного блоком управления робототехникой;
- средство декодирования, запрограммированное для декодирования машиночитаемого кода; и
- запрограммированные инструкции, использующие декодированный машиночитаемый код в качестве ввода.
Блок управления робототехникой выполнен с возможностью передачи закодированных данных, касающихся блока управления робототехникой, путем формирования на лицевой стороне корпуса машиночитаемого кода кодирования данных, касающихся блока управления робототехникой. Внешнее устройство выполнено с возможностью приема закодированных данных, касающихся блока управления робототехникой, посредством устройства захвата, сконфигурированного для захвата машиночитаемого кода, сформированного блоком управления. Внешнее устройство дополнительно содержит запрограммированные инструкции по взаимодействию с блоком управления робототехникой с использованием принятых кодированных данных. Таким образом, внешнее устройство сконфигурировано для взаимодействия с блоком управления робототехникой. Как упомянуто выше, внешнее устройство может быть мобильным устройством и/или другим блоком управления робототехникой. Например, мобильное устройство может быть мобильным телефоном, планшетным компьютером, портативным компьютером и/или игровым контроллером, а другой блок управления робототехникой может быть, например, блоком управления робототехникой, совместимым с или аналогичным блоку управления робототехникой игрушечного конструктора робототехники. Другой блок управления робототехникой может быть сконфигурирован даже для имитации любого из мобильных устройств, взаимодействующих с блоком управления робототехникой игрушечного конструктора. Таким образом, опыт интерактивного обучения при использовании игрушечного конструктора робототехники продолжается от сборки модели, содержащей блок управления робототехникой, до освоения взаимодействия с внешними устройствами, которые, таким образом, могут быть включены в опыт интерактивного конструирования и интерактивной игры. Упомянутые преимущества, как уже обсуждалось выше в контексте блока управления робототехникой, также достигаются с помощью этого аспекта изобретения, включая многочисленные аспекты опыта интерактивного познания и игры, стимулированные таким образом.
В предпочтительном варианте осуществления, внешнее устройство выполнено с возможностью анализа захваченного визуального шаблона с целью декодирования данных, закодированные в визуальном шаблоне. Кроме того, в предпочтительном варианте осуществления, внешнее устройство выполнено с возможностью приема, обработки и/или распознавания машиночитаемого визуального кода. Кроме того, предпочтительно, чтобы внешнее устройство было дополнительно выполнено с возможностью интерпретации принятых и декодированных данных в качестве инструкций. Кроме того, предпочтительно, чтобы внешнее устройство (и блок управления робототехникой) содержало средство связи, предназначенное для установления беспроводной связи между внешним устройством и блоком управления робототехникой с использованием машиночитаемого визуального кода.
Кроме того, в некоторых вариантах осуществления игрушечный конструктор робототехники дополнительно содержит средство беспроводной связи, причем внешнее устройство сконфигурировано для установления беспроводной линии связи с целью взаимодействия с блоком управления робототехникой на основе принятых и декодированных данных. В частности, беспроводная линия связи является дополнительной линией, отличающейся от линии связи между внешним устройством и блоком управления робототехникой, использующей излучатели света в качестве излучателей, а устройство захвата/средство декодирования в качестве приемника. В предпочтительном варианте осуществления, дополнительная связь может устанавливаться с помощью запрограммированных инструкций по взаимодействию, полученных из декодированного машиночитаемого кода. Дополнительная линия связи может основываться на радиочастотной связи с использованием стандартного протокола, такого как любой подходящий протокол цифровой связи. Беспроводная связь также может осуществляться через ИК-канал или тому подобное. Как упоминалось выше, дополнительная линия связи может также реализовываться способами мультиплексирования, такими как способы спектрального мультиплексирования. Например, излучатели света в двумерной матричной компоновке могут содержать излучатели, излучающие в спектральных диапазонах, смежных с видимым диапазоном, таких как один или несколько из ИК-диапазонов и/или один или несколько из УФ-диапазонов спектра. В частности, дополнительная линия связи может преимущественно использоваться для непосредственного взаимодействия нескольких блоков управления робототехникой.
Кроме того, в некоторых вариантах осуществления, внешнее устройство представляет собой мобильное устройство, такое как игровой контроллер, мобильный телефон, планшетный компьютер или переносной/портативный компьютер, причем упомянутое мобильное устройство содержит запрограммированные инструкции и пользовательский интерфейс, при этом упомянутые запрограммированные инструкции и пользовательский интерфейс совместно выполнены с возможностью программирования и/или управления блоком управления робототехникой.
Кроме того, в некоторых вариантах осуществления конструктор дополнительно содержит:
- устройство захвата, взаимодействующее с блоком управления робототехникой, причем устройство захвата выполнено с возможностью захвата машиночитаемого кода;
- средство декодирования, запрограммированное для декодирования машиночитаемого кода; и
- запрограммированные инструкции, использующие декодированный машиночитаемый код в качестве ввода.
Блок управления робототехникой выполнен с возможностью передачи закодированных данных, касающихся блока управления робототехникой, путем формирования на лицевой стороне корпуса машиночитаемого кода кодирования данных, касающихся блока управления робототехникой. Блок управления робототехникой также выполнен с возможностью приема кодированных данных с помощью устройства захвата, сконфигурированного для захвата машиночитаемого кода, сформированного, например, другим блоком управления. Такой вариант осуществления особенно полезен, когда игрушечный конструктор робототехники выполнен с возможностью взаимодействия множества блоков управления робототехникой друг с другом, например, при создании нескольких роботов, сконфигурированных для игры, в которой роботы могут встречаться друг с другом, при встрече узнавать/идентифицировать друг друга и/или иным образом взаимодействовать друг с другом. Например, игрушечный конструктор робототехники может содержать несколько блоков управления робототехникой, сконфигурированных для взаимодействия друг с другом, или блок управления робототехникой игрушечного конструктора может быть сконфигурирован для взаимодействия с одним или несколькими внешними устройствами, которые являются блоками управления робототехникой или могут имитировать один или несколько других блоков управления робототехникой.
В соответствии с еще одним аспектом изобретения, набор игрушечных конструкторов робототехники включает в себя первый конструктор, соответствующий любому из вышеупомянутых вариантов осуществления, и второй конструктор, соответствующий любому из вышеупомянутых вариантов осуществления. Таким образом, множество игрушечных конструкторов, соответствующих любому из раскрытых здесь вариантов осуществления, могут объединяться в набор, например для создания взаимодействующих роботов. Такой набор содержит несколько блоков управления робототехникой, а именно, по меньшей мере первый блок управления робототехникой и второй блок управления робототехникой. В предпочтительном варианте осуществления, несколько блоков управления робототехникой могут управляться напрямую и даже автономно, чтобы взаимодействовать друг с другом, используя излучатели света и способы захвата, как подробно описывается ниже.
В некоторых вариантах осуществления набора игрушечных конструкторов робототехники, первые излучатели света первого блока управления робототехникой первого конструктора функционируют с целью формирования машиночитаемого кода кодирования данных, касающихся первого блока управления робототехникой; и/или вторые излучатели света второго блока управления робототехникой второго конструктора функционируют с целью формирования машиночитаемого кода кодирования данных, касающихся упомянутого второго блока управления робототехникой.
Кроме того, в некоторых вариантах осуществления набора игрушечных конструкторов робототехники, первый конструктор дополнительно содержит:
- первое устройство захвата, взаимодействующее с первым блоком управления робототехникой, причем первое устройство захвата выполнено с возможностью захвата машиночитаемого кода, сформированного вторыми излучателями света;
- средство декодирования, запрограммированное для декодирования захваченного машиночитаемого кода; и
- запрограммированные инструкции по взаимодействию с первым блоком управления робототехникой с использованием декодированного машиночитаемого кода;
и/или второй конструктор дополнительно содержит:
- второе устройство захвата, взаимодействующее со вторым блоком управления робототехникой, причем второе устройство захвата выполнено с возможностью захвата машиночитаемого кода, сформированного первыми излучателями света;
- средство декодирования, запрограммированное для декодирования захваченного машиночитаемого кода; и
- запрограммированные инструкции по взаимодействию с первым блоком управления робототехникой с использованием декодированного машиночитаемого кода.
Таким образом, несколько блоков управления робототехникой могут непосредственно распознавать и/или взаимодействовать друг с другом автономно. В качестве альтернативы или в дополнение к этому, взаимодействие также может устанавливаться/инициироваться внешним устройством, взаимодействующим с двумя или более блоками управления робототехникой набора, как обсуждалось выше, в отношении игрушечного конструктора робототехники.
Согласно еще одному дополнительному аспекту изобретения, ниже представлены некоторые примерные варианты осуществления способа управления блоком управления робототехники. Такие варианты осуществления полезны для предоставления пользователю как инструктивного, так и увлекательного опыта, позволяя пользователю создавать и понимать сложную конструкцию робототехники. При визуализации этапов создания и других этапов взаимодействия блока управления робототехникой с окружением на самом блоке управления робототехникой, такие способы становятся особенно полезными для интуитивно-интерактивного руководства действиями даже неопытного пользователя. Кроме того, этими способами аналогичным образом достигаются также те преимущества, которые рассматривались в связи с блоком управления робототехникой (и игрушечным конструктором робототехники, содержащим такой блок управления робототехникой). Соответственно, среди прочего, раскрытые здесь способы полезны для приобретения опыта создания и игрового опыта, которые могут предусматривать один или несколько из следующих этапов:
- создание улучшенной конструкции, содержащей блок управления робототехникой, периферийные устройства, подключенные к портам ввода/вывода блока управления робототехникой и/или элементы игрушечного конструктора;
- создание улучшенной конструкции с использованием интерактивной процедуры;
- побуждение блока управления робототехникой обеспечить индикацию выполненных соединений и/или подлежащих установлению соединений между портами ввода/вывода блока управления робототехникой и периферийными устройствами;
- побуждение блока управления робототехникой к формированию машиночитаемого цифрового кода в виде визуального шаблона;
- установление контакта между блоком управления робототехникой и внешним устройством путем представления визуального шаблона оптическому устройству ввода внешнего устройства, причем внешнее устройство можно рассматривать как "наблюдающее" за блоком управления робототехникой, чтобы осуществлять захват упомянутого визуального шаблона;
- захват визуального шаблона, осуществляя таким образом "считывание" машиночитаемого цифрового кода в ходе прямого межмашинного взаимодействия;
- на основе захваченного машиночитаемого цифрового кода и, в частности, в ответ на данные, закодированные в захваченных данных, разработка инструкций по взаимодействию блока управления робототехникой и внешнего устройства;
- в ответ на упомянутые инструкции, инициирование и установление дополнительной линии связи между внешним устройством и блоком управления робототехникой;
- передача управления улучшенной конструкцией внешнему устройству, предпочтительно посредством дополнительной линии связи;
- программирование блока управления робототехникой и/или любых подключенных к нему периферийных устройств, например, посредством пользовательского интерфейса внешнего устройства; и/или
- дистанционное управление блоком управления робототехникой и/или любыми подключенными к нему периферийными устройствами, например, посредством пользовательского интерфейса внешнего устройства;
- создание и конфигурирование пользовательского интерфейса для взаимодействия с улучшенной конструкцией;
- взаимодействие с улучшенной конструкцией с внешнего устройства; и/или
- программирование и дистанционное управление улучшенной конструкцией посредством пользовательского интерфейса внешнего устройства.
В некоторых предпочтительных вариантах осуществления изобретения, способ управления блоком управления робототехникой предусматривает этапы:
- формирование машиночитаемого цифрового кода кодирования данных, касающихся блока управления робототехникой, причем машиночитаемый цифровой код формируется на блоке управления робототехникой в виде визуального шаблона;
- представление визуального шаблона оптическому устройству ввода внешнего устройства;
- захват машиночитаемого цифрового кода с помощью оптического устройства ввода внешнего устройства для получения захваченных данных, представляющих собой данные, закодированные машиночитаемым цифровым кодом;
- на основе полученных данных разработка инструкций по взаимодействию блока управления робототехникой и внешнего устройства; и
- выполнение инструкций для установления упомянутого взаимодействия.
Кроме того, в некоторых вариантах осуществления способа, инструкции по взаимодействию включают в себя инструкции по инициированию дополнительной линии связи между внешним устройством и блоком управления робототехникой. Затем, в результате выполнения таких инструкций, устанавливается дополнительная связь.
Кроме того, в некоторых вариантах осуществления, способ дополнительно предусматривает этап обеспечения на внешнем устройстве пользовательского интерфейса для взаимодействия с блоком управления робототехникой.
Кроме того, в некоторых вариантах осуществления способа, упомянутый пользовательский интерфейс для взаимодействия с блоком управления робототехникой содержит:
- элементы, предназначенные для программирования блока управления робототехникой;
- элементы, предназначенные для программирования периферийных устройств, подключенных к портам ввода/вывода блока управления робототехникой;
- элементы для дистанционного управления блоком управления робототехникой; и/или
- элементы для дистанционного управления периферийными устройствами, подключенными к портам ввода/вывода блока управления робототехникой.
Предпочтительно, чтобы способ управления блоком управления робототехникой реализовывался в блоке управления робототехникой в соответствии с любым из раскрытых здесь вариантов осуществления. Кроме того, предпочтительно, чтобы способ управления блоком управления робототехникой реализовывался в игрушечном конструкторе робототехники, включающем в себя такой блок управления робототехникой, и/или в модели игрушечной конструкции, включающей в себя такой блок управления робототехникой.
Краткое описание чертежей
Предпочтительные варианты осуществления изобретения более подробно описаны ниже со ссылкой на прилагаемые к описанию чертежи, которых показано:
на фиг. 1-3 – элементы игрушечного конструктора известного уровня техники;
на фиг. 4 –блок управления робототехникой в одном из вариантов осуществления изобретения;
на фиг. 5-7 – схематичные виды вариантов осуществления блока управления робототехникой с матричной компоновкой отдельных излучателей света, которые выровнены по одной линии с портами ввода/вывода, расположенными вдоль краев матрицы; и
на фиг. 8 – схема системы управления робототехникой в одном из вариантов осуществления изобретения.
Осуществление изобретения
Различные аспекты и варианты осуществления блока управления робототехникой, а также игрушечных конструкторов, которые улучшены путем включения в их состав описанного в данном документе блока управления робототехникой, ниже описываются со ссылкой на элементы игрушечного конструктора, выполненные в форме кирпичиков. Однако изобретение применимо к другим формам элементов конструктора для использования в наборах игрушечных конструкторов.
На фиг. 1 показан элемент игрушечного конструктора с соединительными шпильками на его верхней поверхности и полостью, продолжающейся в кирпичик снизу. Полость имеет центральную трубку, и соединительные шпильки другого кирпичика могут приниматься в полость с фрикционным зацеплением, как описано в патенте США 3005282. На фиг. 2 и 3 показаны другие подобные элементы конструктора известного уровня техники. Элементы конструктора, показанные на остальных чертежах, имеют тот же известный тип соединительных элементов в форме взаимодействующих шпилек и полостей. Однако также могут использоваться другие типы соединительных элементов в дополнение или вместо шпилек и полостей. Соединительные шпильки расположены в виде квадратной плоской сетки, то есть определяют ортогональные направления, вдоль которых расположены последовательности соединительных шпилек. Расстояние между соседними соединительными шпильками постоянно и одинаково в обоих направлениях. Такое или аналогичное расположение соединительных элементов в местах соединения, определяющих правильную плоскую сетку, позволяет соединять элементы игрушечного конструктора в дискретном количестве положений и ориентаций относительно друг друга, в частности, под прямыми углами относительно друг друга.
На фиг. 4 показан блок 100 управления робототехникой в одном из вариантов осуществления изобретения. Блок 100 управления робототехникой имеет корпус 110, в котором расположен процессор 120. Процессор 120 содержит запрограммированные инструкции, которые могут быть активированы и выполнены в ответ на ввод от пользователя, например, через управляемые пользователем элементы управления на блоке управления робототехникой или с устройства, взаимодействующего с блоком управления робототехникой, например, посредством проводного или беспроводного соединения. Двумерная матрица 130 ортогональных строк и столбцов излучателей 131 света расположена на лицевой стороне корпуса 110, причем излучатели 131 света соединены для взаимодействия с процессором 120. Матрица 130 имеет множество отдельных излучателей 131 света, которые расположены с равными интервалами в виде двумерной матрицы. Источники света 131 расположены в виде прямоугольной матрицы строк и столбцов. Отдельные излучатели 131 света являются индивидуально управляемыми излучателями света, такими как светодиоды. Излучатели 131 света работают в соответствии с инструкциями процессора 120.
Блок 100 управления робототехникой дополнительно содержит множество портов 140a-f ввода/вывода, которые соединены для взаимодействия с процессором 120. Порты 140a-f ввода/вывода расположены вдоль противоположных краев матрицы 130, причем первая группа портов 140a-c ввода/вывода расположена вдоль первого края матрицы 130, а вторая группа портов 140d-f ввода/вывода расположена вдоль второго края матрицы 130 напротив первого края. В данном случае количество портов 140a-c ввода/вывода первой группы равно количеству портов 140d-f ввода/вывода второй группы. Порты 140a-f ввода/вывода представляют собой в себя гнезда, расположенные вдоль краев лицевой стороны корпуса 110, причем гнезда доступны для вставки взаимодействующих вилок (не показаны) сбоку корпуса 110. Порты 140a-f ввода/вывода определяют интерфейсы для подключения периферийных устройств. Интерфейсы могут включать в себя каналы цифрового сигнала, каналы аналогового сигнала и/или выход источника питания для питания периферийных устройств. Каждый из портов 140a-f ввода/вывода имеет соответствующую ширину порта вдоль края матрицы, которая в варианте осуществления, показанном на фиг. 4, отмечена метками рядом с матрицей 130 вдоль соответствующего края лицевой стороны корпуса 110. Порты ввода/вывода рассчитаны на операции ручной сборки в контексте описанного здесь игрушечного конструктора и, в частности, должны подходить для использования детьми или неопытными пользователями в таком ручном режиме сборки.
Излучатели 131 света выровнены по одной линии с портами 140a-f ввода/вывода таким образом, что каждый из портов 140a-f ввода/вывода имеет соответствующий, однозначно ассоциируемый излучатель 131a-f света рядом с ним. В частности, строки матрицы излучателей 131 света, первая группа портов 140a-c ввода/вывода и вторая группа портов 140d-f ввода/вывода выровнены по одной линии относительно друг друга таким образом, что каждый из портов 140a-c ввода/вывода первой группы расположен на одной линии с портом 140d-f ввода/вывода соответствующей второй группы через ряд излучателей 131 света. Размеры излучателей света подобраны таким образом, чтобы они соответствовали размерам портов ввода/вывода, что позволяет легко ассоциировать их, при этом типичные размеры составляют от нескольких миллиметров до нескольких сантиметров.
Между строками, содержащими излучатели 131a-f света, расположены дополнительные излучатели 131 света в виде равномерно распределенной сетки, тем самым увеличивая количество и разнообразие информации, которая может быть представлена в виде визуального шаблона блоком управления робототехникой без ущерба для однозначной ассоциации портов 140a-f ввода/вывода и ассоциированных с ними излучателей 131a-f света.
Корпус 110 также имеет один или несколько соединительных элементов 11, сконфигурированных для разъемного соединения блока управления робототехникой с взаимодействующими элементами игрушечного конструктора, имеющими соответствующие/взаимодействующие соединительные элементы. Эти соединительные элементы 11 позволяют механически прикреплять блок 100 управления робототехникой к элементам игрушечного конструктора и, таким образом, интегрировать блок 100 управления робототехникой в модель игрушечной конструкции, например, в сочетании с периферийными устройствами, например, электродвигателями и датчиками, также содержащими такие соединительные элементы. Таким образом, модель игрушечной конструкции может быть "оживлена" для совершенствования интерактивного игрового и познавательного опыта пользователя.
Предпочтительно, чтобы блок 100 управления робототехникой также содержал источник питания, предназначенный для питания по меньшей мере блока 100 управления робототехникой и, кроме того, предпочтительно, чтобы он мог обеспечивать электропитание подключенных периферийных устройств, например, через интерфейс порта ввода/вывода. Периферийные устройства могут представлять собой, но не ограничиваются ими, электродвигатели или датчики. Под источником питания может пониматься любой подходящий источник питания. Однако предпочтителен автономный источник питания, встроенный в блок управления робототехникой. Неограничивающими примерами таких автономных источников питания являются: батарейный источник питания, например, аккумуляторная батарея; энергоаккумулирующие устройства, например, фотоэлектрические элементы; или электрохимические преобразователи энергии, например, топливные элементы с достаточным запасом/резервуаром топлива. Преимущество такого подхода состоит в том, что блок 100 управления робототехникой можно легко гибко интегрировать в модель игрушечной конструкции, а модели игрушечной конструкции, содержащие один или несколько таких автономных блоков 100 управления робототехникой, могут автономно перемещаться, тем самым совершенствуя интерактивный игровой и познавательный опыт пользователя при создании такой модели игрушечной конструкции и последующем взаимодействии с созданной конструкцией.
Обращаясь теперь к фиг. 5-7, рассматриваются три различных варианта осуществления блока 200, 300, 400 управления робототехникой. Различные варианты осуществления относятся к различным конфигурациям, облегчающим разные режимы взаимодействия блока 200, 300, 400 управления робототехникой с его окружением посредством излучателей 231, 331, 431 света.
На всех трех фиг. 5-7, блок 200, 300, 400 управления робототехникой схематически представлен видом сверху с матрицей 230, 330, 430, имеющей отдельные излучатели 231, 331, 431 света, расположенные в виде двумерной матрицы, занимающей часть лицевой поверхности блока 200, 300, 400 управления робототехникой. Первая группа портов 240a-c, 340a-c, 440a-c ввода/вывода распределена по левому краю матрицы 230, 330, 430, а вторая группа портов 240d-f, 340d -f, 440d-f ввода/вывода распределена по правому краю матрицы 230, 330, 430. Например, имеется три порта 240a-c, 340a-c, 440a-c ввода/вывода первой группы и три порта 240d-f, 340d-f, 440d-f ввода/вывода второй группы. Первая группа портов 240a-c, 340a-c, 440a-c ввода/вывода, вторая группа портов 240d-f, 340d-f, 440d-f ввода/вывода и излучатели 231, 331, 431 света выровнены по одной линии относительно друг друга таким образом, что каждый из портов 240a-c, 340a-c, 440a-c ввода/вывода первой группы расположен на одной линии с соответствующим портом 240d-f, 340d-f, 440d-f ввода/вывода второй группы через ряд отдельных излучателей 231, 331, 431 света. Каждый из портов 240a-f, 340a-f, 440a-f ввода/вывода имеет непосредственно рядом с ним однозначно ассоциируемый излучатель 231a-f, 331a-f, 431a-f света. Таким образом, порт 240a, 340a, 440a ввода/вывода первой группы визуально ассоциирован с соответствующим портом 240d, 340d, 440d ввода/вывода второй группы через ряд излучателей 231, 331, 431 света, продолжающийся от излучателя 231a, 331a, 431a света к излучателю 231d, 331d, 431d света. Таким же образом порты ввода/вывода первой группы, обозначенные буквой "b", визуально привязываются к портам ввода/вывода, обозначенным буквой "e", через ряд, содержащий ассоциированные излучатели света, обозначенные буквами "b" и "e" соответственно; и, соответственно, порты ввода/вывода, обозначенные буквами "d" и "f", призываются к ассоциированным излучателями света, обозначенными буквами"d" и "f".
В качестве примера, каждая из матриц 230, 330, 430, показанных на фиг. 5-7, имеет 25 отдельных излучателей 231, 331, 431 света, которые равномерно распределены в виде прямоугольной матрицы из пяти строк по пять столбцов: три ряда излучателей света 231, 331, 431, содержащие ассоциированные излучатели света 231a-f, 331a-f, 431a-f, выровнены по одной линии с портами 240a-f, 340a-f, 440a-f ввода/вывода, как описано выше; и два промежуточных ряда, причем каждый из промежуточных рядов расположен между выровненными рядами. Каждый ряд образован пятью излучателями 231, 331, 431 света.
Излучатели 231, 331, 431 света могут адресоваться индивидуально и функционировать в соответствии с инструкциями процессора. Упомянутые источники 231, 331, 431 света имеют по меньшей мере состояние "ВКЛ", в котором излучатель света включен и излучает свет, и состояние "ВЫКЛ", в котором излучатель света выключен и, по существу, не излучает свет. Состояния "ВКЛ" и "ВЫКЛ" могут, например, характеризоваться пороговыми значениями минимальной интенсивности излучения света для состояния "ВКЛ" и максимальной интенсивности излучения света для состояния "ВЫКЛ". Промежуточные состояния с промежуточными интенсивностями излучения света между состоянием "ВКЛ" и "ВЫКЛ" возможны и позволяют увеличить информативную глубину шаблона, создаваемого группой излучателей 231, 331, 431 света. Таким образом могут формироваться различные шаблоны, представляющие разные данные и/или информацию, касающуюся блока 200, 300, 400 управления робототехникой и его взаимодействия и/или взаимосвязи с окружением. Благодаря пространственному выравниванию по одной линии, данные и/или информация могут выборочно и/или совместно ассоциироваться с одним или несколькими конкретными портами 240a-f, 340a-f, 440a-f ввода/вывода блока 200, 300, 400 управления робототехникой. Это позволяет обеспечить особо интуитивное понимание состояния блока 200, 300, 400 управления робототехникой, тем самым вовлекая пользователя и предоставляя ему возможность получения интерактивного игрового и познавательного опыта.
Данные и/или информация представляются в соответствии с инструкциями, выполняемыми и выдаваемыми процессором в соответствии с вводом в блок 200, 300, 400 управления робототехникой. Например, блок 200, 300, 400 управления робототехникой может получить запрос на выполнение запрограммированных инструкций, хранящихся в самом блоке 200, 300, 400 управления робототехникой, или на выполнение инструкций, полученных от взаимодействующего блока или устройства дистанционного управления/программирования через подходящее соединение, такое как проводное или беспроводное соединение. Выполнение также может инициироваться инструкциями, полученными в качестве прямого ввода от пользователя через управляемый пользователем элемент управления на блоке 200, 300, 400 управления робототехникой. В качестве примера, блок 200, 300, 400 управления робототехникой может представлять информацию, относящуюся к состоянию: самого блока управления робототехникой; периферийного устройства, подключенного к одному из портов 240a-f, 340a-f, 440a-f ввода/вывода блока 200, 300, 400 управления робототехникой; игрушечного конструктора робототехники, частью которого является блок 200, 300, 400 управления робототехникой; модели игрушечной конструкции, частью которой является блок 200, 300, 400 управления робототехникой; соединения порта ввода/вывода, которое выполнено или должно быть выполнено в соответствии с этапом плана создания; соединения порта ввода/вывода для указанного/идентифицированного периферийного устройства; или проверки установленных соединений.
Блок 200 управления робототехникой, показанный на фиг. 5, выполнен с возможностью активации/деактивации в соответствии с инструкциями процессора 220 одного или нескольких ассоциированных излучателей 231a-f света, расположенных рядом с соответствующими портами 240a-f ввода/вывода. Такая схема активации/деактивации ассоциированных излучателей 231a-f может быть полезна для индикации состояния соединения, установленного на соответствующих портах 240a-f ввода/вывода, например, успешного соединения или активности ввода/вывода в этом соединении. Схема активации/деактивации блока 200 управления робототехникой, показанная на фиг. 5, также может использоваться для визуализации состояния периферийного устройства, подключенного к заданному порту 240a-f ввода/вывода, посредством ассоциированного источника 231a-f света. Упомянутое состояние периферийного устройства может, например, представлять собой рабочее/нерабочее состояние. Схема активации/деактивации может дополнительно визуально представлять значения входных или выходных данных, которыми блок управления обменивается с периферийным устройством, например, значение величины, измеренной датчиком, или значение мощности, подводимой к электродвигателю. Измеренные величины могут преимущественно относиться к физическим величинам, которые полезны для применений в робототехнике, таким как движение, касание, близость, давление, температура, ток/напряжение, интенсивность света, цвет, распознавание шаблонов, магнитные поля, гироскопическая ориентация, местоположение, позиционирование или тому подобное. Используя пространственную корреляцию ассоциированных излучателей света с соответствующими портами ввода/вывода, схема активации/деактивации варианта 200 осуществления, показанного на фиг. 5, особенно подчеркивает ассоциацию между конкретным портом ввода/вывода, принимающим соответствующий ввод от периферийного устройства, и визуализируемым количеством. Интуитивно понятная связь, создаваемая схемой активации/деактивации между визуализируемым значением, портом ввода/вывода и подключенным к нему периферийным устройством, таким образом, обеспечивает особенно наглядный игровой и познавательный опыт для пользователя блока 200 управления робототехникой. Еще одно применение этого варианта осуществления блока 200 управления робототехникой особенно полезно для совершенствования опыта интерактивной игры и познания, когда схема активации/деактивации, показанная на фиг. 5, предлагается в соответствии с этапами плана создания модели игрушечной конструкции робототехники, включающей в себя блок 200 управления робототехникой. Визуализации в соответствии с упомянутой схемой активации/деактивации может предусматривать проверку требуемых соединений, указание конкретных соединений, которые должны быть установлены на конкретном этапе плана создания, определение конкретного порта ввода/вывода в ответ на передачу идентификатора конкретного периферийного устройства блоку управления робототехникой и/или проверку достоверности установленных соединений.
Визуализация может реализовываться с использованием простой схемы активации/деактивации, включающей и выключающей ассоциированные излучатели света в соответствии с инструкциями процессора, получающего соответствующий ввод. Визуализация может предусматривать управление параметрами излучения света, такими как цвет, интенсивность и длительность, и даже может предусматривать управление излучением света в импульсной или иной зависящей от времени последовательности. Схема активации/деактивации блока 200 управления робототехникой, показанная на фиг. 5, может дополнительно включать в себя излучатели 231 света, смежные с ассоциированными излучателями 231a-f света соответствующих портов 240a-f ввода/вывода. Например, соседние излучатели света могут включаться в схему активации/деактивации, чтобы символизировать значение длиной линии излучателей 231 света, начиная с ассоциированного излучателя 231a-f света и включая его. Кроме того, в случае необходимости можно выделить конкретную визуализацию с помощью зависящих от времени последовательных эффектов, таких как мигание или эффект бегущих огней.
Блок 300 управления робототехникой, показанный на фиг. 6, выполнен с возможностью активации/деактивации в соответствии с инструкциями процессора 320 по меньшей мере двух из ассоциированных излучателей 331a-f света, расположенных рядом с соответствующими портами 340a-f ввода/вывода, и дополнительной активации/деактивации излучателей света, соединяющих два ассоциированных излучателя 331a-f света. Такая схема активации/деактивации излучателей 331 света может быть полезна для индикации соединения, установленного между соответствующими портами 340a-f ввода/вывода, относящимися к вовлеченным ассоциированным излучателям 331a-f света.
Как упоминалось выше, визуализация может реализовываться с использованием простой схемы активации/деактивации, которая включает и выключает ассоциированные излучатели света в соответствии с инструкциями процессора 320, получающего соответствующий ввод. Визуализация может предусматривать управление параметрами излучения света, такими как цвет, интенсивность и длительность, и может дополнительно предусматривать управление излучением света в импульсной или иной зависящей от времени последовательности.
Блок 400 управления робототехникой, показанный на фиг. 7, также использует двумерную матрицу 430, имеющую отдельные излучатели 431 света, которые расположены равномерно в виде четко определенной прямоугольной сетки из строк и столбцов. Сетка излучателей 431 света выровнена по одной линии с портами 440a-f ввода/вывода, как уже описывалось выше. Блок 400 управления робототехникой выполнен с возможностью активации/деактивации в соответствии с инструкциями процессора 420 группы излучателей 431 света, чтобы формировать машиночитаемый двумерный визуальный шаблон. Упомянутый двумерный визуальный шаблон представляет собой цифровой код, который кодирует данные, касающиеся блока 400 управления робототехникой, например, данные, идентифицирующие блок 400 управления робототехникой, данные, относящиеся к внутреннему состоянию блока 400 управления робототехникой, данные, относящиеся к программам, хранящимся в блоке 400 управления робототехникой, и данные, относящиеся к программе, активированной в процессоре блока 400 управления робототехникой. Визуальный шаблон адаптирован для оптического распознавания внешним устройством, таким как камера мобильного устройства. Это особенно полезно для взаимодействия с внешним устройством в интуитивно понятной и простой манере, как более подробно описывается ниже со ссылкой на фиг. 8.
Как упоминалось выше, визуализация может предусматривать управление параметрами излучения света, такими как цвет, интенсивность и длительность, и может дополнительно включать в себя управление излучением света в импульсной или иной зависящей от времени последовательности. Преимущественно, в этом варианте осуществления, визуализация реализуются с использованием простой схемы активации/деактивации, которая включает и выключает ассоциированные излучатели света в соответствии с инструкциями процессора 420, чтобы сформировать машиночитаемый двумерный цифровой код, который может быть захвачен с помощью простого оптического сканирующего устройства, такого как камера мобильного устройства.
Различные варианты осуществления, показанные на фиг. 5-7, могут быть реализованы в виде различных схем активации/деактивации с помощью одного и того же блока управления робототехникой и выбираться/запускаться в зависимости от ввода или автоматически в соответствии с интерактивным планом создания, выполняемом на внешнем устройстве. Внешнее устройство может составлять пару и может связываться с блоком управления робототехникой, например, в системе 500 управления робототехникой, как более подробно описывается ниже со ссылкой на фиг. 8.
На фиг. 8 показана система 500 управления робототехникой, содержащая блок 501 управления робототехникой и внешнее устройство 502, выполненное с возможностью взаимодействия с блоком 501 управления робототехникой. Блок 501 управления робототехникой имеет процессор 520 и матрицу 530, связанную с процессором 520. Матрица 530 содержит отдельные излучатели 531 света, которые могут быть адресованы по отдельности и активированы/деактивированы в соответствии с инструкциями процессора 520 таким образом, чтобы представить машиночитаемый визуальный шаблон на лицевой стороне блока 501 управления робототехникой. Блок 501 управления робототехникой дополнительно содержит порты 540 ввода/вывода для взаимодействия с периферийными устройствами 90, такими как электродвигатели М или датчики S. Порты ввода/вывода выровнены по одной линии с излучателями 531 света матрицы 530, как уже описывалось в другом месте данного документа.
Модуль 501 управления выполнен с возможностью передачи кодированных данных, касающихся модуля 501 управления, путем представления на матрице 530 отдельных излучателей 531 света машиночитаемого визуального шаблона, кодирующего такие данные. В качестве примера, это достигается схемой управления в соответствии с вариантом осуществления блока 400 управления робототехникой, как описано выше со ссылкой на фиг. 7.
Внешнее устройство 502 выполнено с возможностью приема кодированных данных, касающихся блока управления, посредством устройства 550 захвата, сконфигурированного для захвата визуального шаблона, сформированного блоком 501 управления. Внешнее устройство 502 дополнительно содержит запрограммированные инструкции для взаимодействия с блоком 501 управления робототехникой с использованием принятых закодированных данных.
Визуальный шаблон, представленный на матрице 530, адаптирован для оптического распознавания внешним устройством 502. Внешнее устройство содержит оптическое устройство 550 ввода, такое как оптический датчик формирования изображения, камера, система компьютерного зрения или оптическое сканирующее устройство; и процессор с соответствующим программным модулем для обработки оптического ввода, принятого устройством 550 оптического ввода, для его оптического распознавания. Данные, касающиеся блока управления, могут представлять собой инструкции по взаимодействию внешнего устройства 502 и блока 501 управления робототехникой.
Такие инструкции по взаимодействию могут, например, включать в себя инструкции по сопряжению блока 501 управления робототехникой с внешним устройством 502 для обмена данными посредством беспроводной линии связи. Такие инструкции по взаимодействию могут также включать в себя инструкции по установлению такой беспроводной связи между внешним устройством 502 и блоком 501 управления робототехникой и/или инструкции по выполнению запрограммированных инструкций, сохраненных или загруженных на внешнее устройство 502.
Машиночитаемая линия, которая в то же время видна пользователю, особенно полезна для связи с внешним устройством интуитивно понятным и простым, но в то же время очень гибким способом. Пользователь, как правило, участвует в инициировании и/или управлении связью между двумя машинами (то есть между блоком 501 управления робототехникой и внешним устройством 502). В то же время, работа этой машинной линии связи визуализируется пользователю: пользователь может видеть взаимодействие между блоком 501 управления робототехникой и внешним устройством 502, устанавливаемое и происходящее прямо у него на глазах. Вследствие этого, создание, установление и отслеживание процесса взаимодействия подобным образом является очень поучительным – опять же наращивая опыт интерактивной игры и интерактивного познания.
Как уже рассматривалось выше, визуальные шаблоны для кодирования данных могут предусматривать управление параметрами излучения света излучателями 531 света, такими как цвет, интенсивность и длительность, и могут дополнительно включать в себя управление излучением света в импульсной или иной зависящей от времени последовательности. Предпочтительно, в таком варианте осуществления, визуализация реализуются с использованием простой схемы активации/деактивации, которая включает и выключает ассоциированные излучатели света в соответствии с инструкциями процессора 420, чтобы сформировать машиночитаемый двумерный цифровой код, который может быть захвачен с помощью простого оптического сканирующего устройства, такого как камера мобильного устройства. Закодированные данные могут быть дополнительно представлены в виде временной последовательности различных визуальных шаблонов, которые обнаруживаются внешним устройством способом временного разрешения с использованием регулируемого по времени захвата и обработки шаблонов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВА С МУЗЫКАЛЬНЫМ ВЗАИМОДЕЙСТВИЕМ | 2007 |
|
RU2419477C2 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ КОНФИГУРИРОВАНИЯ ПРОГРАММИРУЕМОГО ЛОГИЧЕСКОГО КОНТРОЛЛЕРА | 2007 |
|
RU2417391C2 |
| СИСТЕМЫ И СПОСОБЫ ПРИМЕНЕНИЯ ОТСЛЕЖИВАНИЯ МОДЕЛИ ДЛЯ ЗАХВАТА ДВИЖЕНИЙ | 2010 |
|
RU2580450C2 |
| СИСТЕМЫ И СПОСОБЫ ПРЕДОСТАВЛЕНИЯ УВЕДОМЛЕНИЙ СИСТЕМНОГО УРОВНЯ В МУЛЬТИМЕДИЙНОЙ КОНСОЛИ | 2006 |
|
RU2408085C2 |
| УПРАВЛЕНИЕ ОНЛАЙНОВОЙ КОНФИДЕНЦИАЛЬНОСТЬЮ | 2011 |
|
RU2550531C2 |
| ЖЕСТОВЫЕ СОКРАЩЕНИЯ | 2010 |
|
RU2574830C2 |
| СИСТЕМЫ, УСТРОЙСТВО И СПОСОБЫ ДЛЯ ФОРМИРОВАНИЯ ВЫВОДА, НАПРИМЕР, СВЕТА, АССОЦИИРОВАННОГО С БЫТОВЫМ ПРИБОРОМ, НА ОСНОВАНИИ ЗВУКА ОБОРУДОВАНИЯ | 2012 |
|
RU2635362C2 |
| СИСТЕМА И СПОСОБЫ ДЛЯ ПРИМЕНЕНИЯ АНИМАЦИЙ ИЛИ ДВИЖЕНИЙ К ПЕРСОНАЖУ | 2010 |
|
RU2544770C2 |
| КОНТРАКТЫ УПРАВЛЕНИЯ ПИТАНИЕМ ДЛЯ ВСПОМОГАТЕЛЬНЫХ УСТРОЙСТВ | 2015 |
|
RU2696321C2 |
| ВВОД И ВОСПРОИЗВЕДЕНИЕ ЭЛЕКТРОННЫХ ЧЕРНИЛ | 2003 |
|
RU2365979C2 |
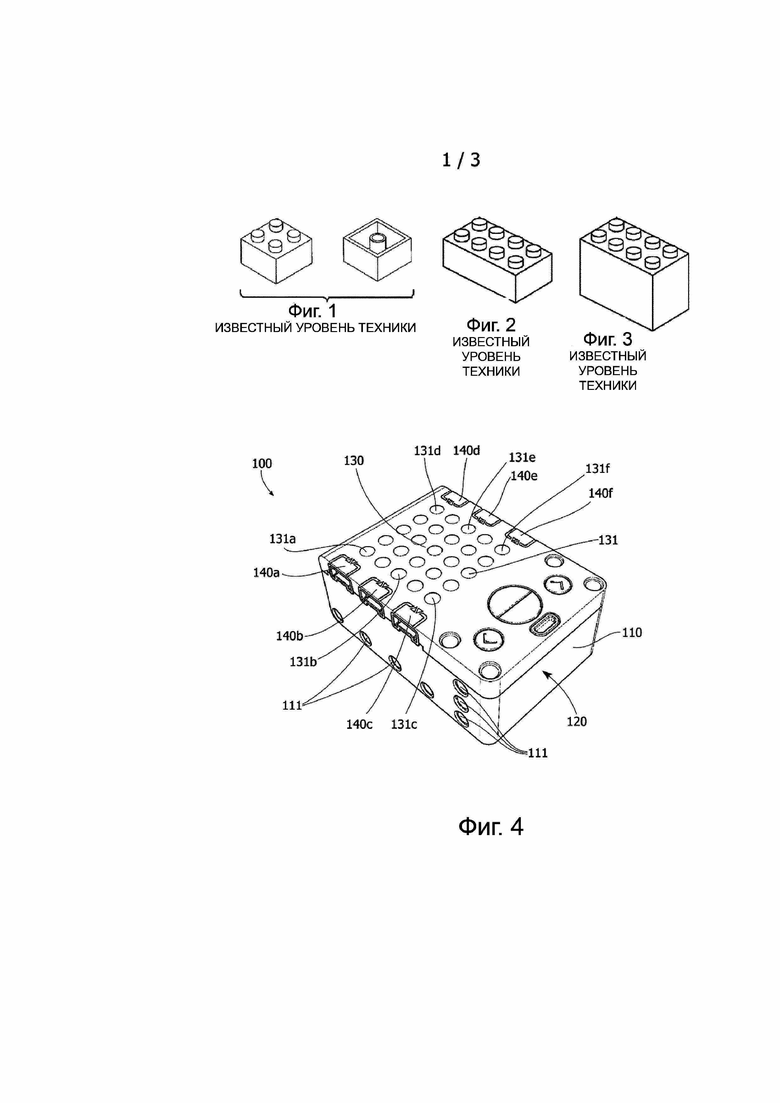

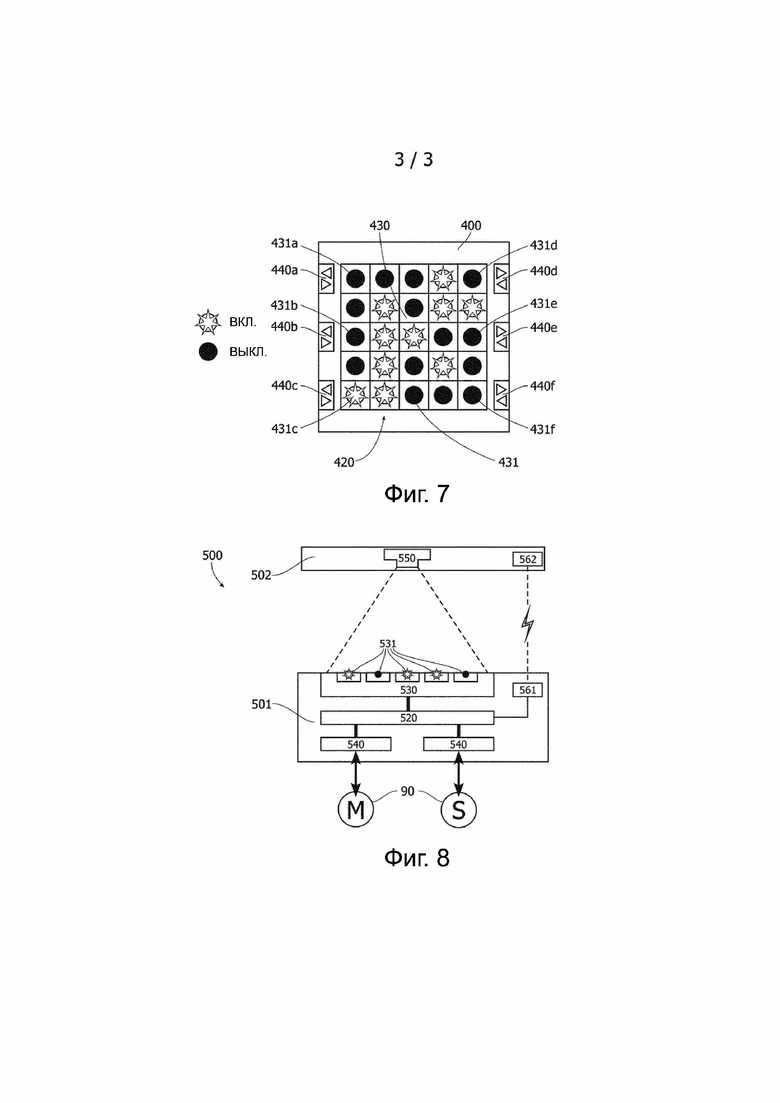
Настоящее изобретение относится к игрушечному конструктору робототехники. Игрушечный конструктор робототехники включает в себя блок управления робототехникой, содержащий: корпус, содержащий соединительные элементы, выполненные с возможностью разъемного соединения блока управления робототехникой с взаимодействующими элементами игрушечного конструктора; процессор, содержащий запрограммированные инструкции; множество портов ввода/вывода, подключенных для осуществления связи с процессором; множество отдельных излучателей света, расположенных в виде двумерной матрицы на лицевой стороне корпуса, причем каждый из излучателей света выполнен с возможностью в ответ на инструкции процессора формирования по меньшей мере двух различных состояний индикатора; при этом излучатели света выровнены по одной линии с портами ввода/вывода, так что каждый из портов ввода/вывода имеет ассоциированный с ним излучатель света. В ответ на инструкции процессора излучатели света могут формировать машиночитаемый код, кодирующий данные, относящиеся к блоку управления робототехникой. Машиночитаемый код может содержать инструкции для взаимодействия блока управления робототехникой с внешним устройством. 4 н. и 23 з.п. ф-лы, 8 ил.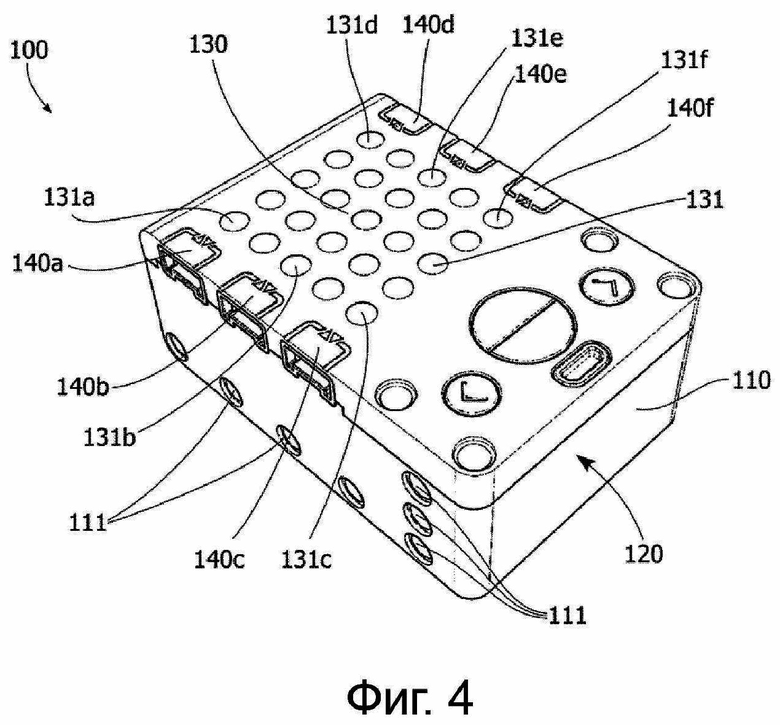
1. Блок управления робототехникой для использования в игрушечном конструкторе робототехники, содержащий:
корпус, содержащий соединительные элементы, выполненные с возможностью разъемного соединения блока управления робототехникой с взаимодействующими элементами игрушечного конструктора;
процессор, содержащий запрограммированные инструкции;
множество портов ввода/вывода, выполненных с возможностью связи с процессором;
множество отдельных излучателей света, причем каждый из излучателей света выполнен с возможностью, в ответ на инструкции процессора, избирательного формирования по меньшей мере двух различных состояний индикатора;
при этом излучатели света расположены в виде двумерной матрицы ортогональных столбцов и строк, причем каждая строка проходит между первым концом и вторым концом, при этом первые концы строк задают первый край матрицы, а вторые концы строк задают второй край матрицы, противоположный первому краю; причем каждый из портов ввода/вывода расположен на линии, задаваемой одной из строк и на одном из первого и второго концов упомянутой строки; и
излучатели света выполнены с возможностью, в ответ на инструкции процессора, формирования машиночитаемых кодов, кодирующих данные, относящиеся к блоку управления робототехникой.
2. Блок управления робототехникой по п. 1, в котором по меньшей мере первый порт ввода/вывода расположен на первом конце строки, а второй порт ввода/вывода расположен на втором конце строки.
3. Блок управления робототехникой по п. 2, в котором первая группа первых портов ввода/вывода расположена вдоль первого края матрицы и/или вторая группа вторых портов ввода/вывода расположена вдоль второго края матрицы.
4. Блок управления робототехникой по любому из пп. 1-3, в котором количество строк равно количеству столбцов.
5. Блок управления робототехникой по любому из пп. 1-4, в котором множество излучателей света выполнены с возможностью совместного формирования шаблона
6. Блок управления робототехникой по любому из пп. 1-5, в котором излучатели света выполнены с возможностью формирования временной последовательности состояний индикатора.
7. Блок управления робототехникой по любому из пп. 1-6, в котором излучатели света содержат излучатели света, выполненные с возможностью излучения видимого света.
8. Блок управления робототехникой по любому из пп. 1-7, в котором излучатели света содержат излучатели света, выполненные с возможностью излучения инфракрасного, предпочтительно ближнего инфракрасного света, и/или ультрафиолетового света.
9. Блок управления робототехникой по любому из пп. 1-8, в котором излучатели света выполнены с возможностью формирования машиночитаемого кода, кодирующего одно или более из: данных, идентифицирующих блок управления робототехникой; данных, относящихся к внутреннему состоянию блока управления робототехникой; данных, относящихся к программе, хранящейся в блоке управления робототехникой; и данных, относящихся к программе, активируемой в процессоре блока управления робототехникой.
10. Блок управления робототехникой по любому из пп. 1-9, в котором излучатели света выполнены с возможностью формирования машиночитаемого кода, кодирующего инструкции для взаимодействия блока управления робототехникой и внешнего устройства.
11. Блок управления робототехникой по п. 10, в котором инструкции для взаимодействия включают в себя одно или более из: инструкций для сопряжения; инструкций для установления беспроводной линии связи между внешним устройством и блоком управления робототехникой; и инструкций для исполнения запрограммированных инструкций внешним устройством.
12. Блок управления робототехникой по любому из пп. 1-11, в котором излучатели света выполнены с возможностью воспроизведения одного или более из: графа, указывающего соединения между двумя или более портами ввода/вывода; графа, указывающего соединения между одним или более портами ввода/вывода и одним или более взаимодействующими периферийными устройствами; и графа, представляющего ввод, принимаемый через один или более портов ввода/вывода.
13. Блок управления робототехникой по любому из пп. 1-12, в котором порты ввода/вывода выполнены в качестве интерфейсов для взаимодействия с периферийными устройствами, такими как датчики, электродвигатели, генераторы и/или источники питания.
14. Блок управления робототехникой по любому из пп. 1-13, в котором порты ввода/вывода содержат один или более цифровых интерфейсов.
15. Блок управления робототехникой по любому из пп. 1-14, в котором порты ввода/вывода выполнены с возможностью проводной и/или беспроводной связи с периферийными устройствами.
16. Игрушечный конструктор робототехники, включающий в себя блок управления робототехникой по любому из пп. 1-15, причем конструктор дополнительно содержит один или более элементов игрушечного конструктора, причем каждый элемент игрушечного конструктора содержит один или более соединительных элементов, выполненных с возможностью разъемного соединения элементов игрушечного конструктора с блоком управления робототехникой.
17. Конструктор по п. 16, дополнительно содержащий внешнее устройство, содержащее:
устройство захвата, выполненное с возможностью захвата машиночитаемого кода, сформированного блоком управления робототехникой;
средство декодирования, запрограммированное для декодирования машиночитаемого кода; и
запрограммированные инструкции, использующие декодированный машиночитаемый код в качестве ввода.
18. Конструктор по п. 17, в котором внешнее устройство представляет собой мобильное устройство, такое как игровой контроллер, мобильный телефон, планшетный компьютер или портативный/переносной компьютер, причем упомянутое мобильное устройство содержит запрограммированные инструкции и пользовательский интерфейс, при этом упомянутые запрограммированные инструкции и пользовательский интерфейс совместно выполнены с возможностью программирования блока управления робототехникой и/или управления им.
19. Конструктор по любому из пп. 16-18, дополнительно содержащий:
устройство захвата, осуществляющее связь с блоком управления робототехникой, причем устройство захвата выполнено с возможностью захвата машиночитаемого кода;
средство декодирования, запрограммированное для декодирования машиночитаемого кода; и
запрограммированные инструкции, использующие декодированный машиночитаемый код в качестве ввода.
20. Набор игрушечных конструкторов робототехники, включающий в себя первый конструктор по любому из пп. 16-19 и второй конструктор по любому из пп. 16-19.
21. Набор по п. 20,
в котором первые излучатели света первого блока управления робототехникой по любому из пп. 1-15 первого конструктора выполнены с возможностью формирования машиночитаемого кода кодированных данных, относящихся к первому блоку управления робототехникой; и/или
вторые излучатели света второго блока управления робототехникой по любому из пп. 1-15 второго конструктора выполнены с возможностью формирования машиночитаемого кода кодированных данных, относящихся ко второму блоку управления робототехникой.
22. Набор по п. 21, в котором первый конструктор дополнительно содержит:
первое устройство захвата, осуществляющее связь с первым блоком управления робототехникой, причем первое устройство захвата выполнено с возможностью захвата машиночитаемого кода, формируемого вторыми излучателями света;
средство декодирования, запрограммированное для декодирования захваченного машиночитаемого кода; и
запрограммированные инструкции для взаимодействия с первым блоком управления робототехникой с использованием декодированного машиночитаемого кода;
и/или второй конструктор дополнительно содержит:
второе устройство захвата, осуществляющее связь со вторым блоком управления робототехникой, причем второе устройство захвата выполнено с возможностью захвата машиночитаемого кода, формируемого первыми излучателями света;
средство декодирования, запрограммированное для декодирования захваченного машиночитаемого кода; и
запрограммированные инструкции для взаимодействия с первым блоком управления робототехникой с использованием декодированного машиночитаемого кода.
23. Способ управления блоком управления робототехникой с использованием внешнего устройства, причем блок управления робототехникой представляет собой блок управления робототехникой по любому из пп. 1-15, причем способ содержит этапы, на которых:
формируют машиночитаемый цифровой код, кодирующие данные, относящиеся к блоку управления робототехникой, при этом машиночитаемый цифровой код формируется в виде визуального шаблона;
представляют визуальный шаблон оптическому устройству ввода внешнего устройства;
захватывают машиночитаемый цифровой код оптическим устройством ввода внешнего устройства для получения захваченных данных, представляющих данные, кодированные машиночитаемым цифровым кодом;
разрабатывают на основе полученных данных инструкции для взаимодействия блока управления робототехникой и внешнего устройства и
исполняют инструкции для установления упомянутого взаимодействия.
24. Способ по п. 23, в котором инструкции для взаимодействия включают в себя инструкции для инициирования дополнительной линии связи между внешним устройством и блоком управления робототехникой.
25. Способ по п. 23 или 24, дополнительно содержащий этап, на котором предоставляют на внешнем устройстве пользовательский интерфейс для взаимодействия с блоком управления робототехникой.
26. Способ по п. 25, в котором упомянутый пользовательский интерфейс для взаимодействия с блоком управления робототехникой содержит одно или более из:
элементов, выполненных с возможностью программирования блока управления робототехникой;
элементов, выполненных с возможностью программирования периферийных устройств, подключенных к портам ввода/вывода блока управления робототехникой;
элементов для дистанционного управления блоком управления робототехникой и
элементов для дистанционного управления периферийными устройствами, подключенными к портам ввода/вывода блока управления робототехникой.
27. Способ по любому из пп. 23-26, в котором внешнее устройство представляет собой дополнительный блок управления робототехникой по любому из пп. 1-15.
| US 2017263155 A1, 14.09.2017 | |||
| Способ удаления алюминия из хроматных щелоков | 1935 |
|
SU45924A1 |
| Устройство для выкапывания корнеплодов | 1985 |
|
SU1271415A1 |
| CN 106267847 A, 04.01.2017. | |||

