Летательный аппарат балансирующий, далее ЛАБ, относится к авиации, а именно к нестандартным видам летательных аппаратов, и может быть использован в качестве военно-транспортного или грузопассажирского летательного аппарата, предназначенного для эксплуатации в условиях труднопроходимой местности, а также в качестве космического корабля.
Аналогов нет.
Задачей заявленного изобретения является обеспечение максимальной грузоподъемности и/или обеспечение максимально экономичного расхода авиационного топлива, которые будут достигаться исключительно за счет уравновешивающей развесовки двух частей корпуса изобретения в сочетании с применением принципа рычага, за который отвечает выступающий сзади корпуса ЛАБ конструктивный элемент с установленным па его заднем конце опорным двигателем(ями) и чье физическое действие (принцип рычага) является основным условием для выполнения заявленной задачи.
Указанный выше технический результат достигается в ЛАБ, включающим в себя две части корпуса, которые зеркально отображают друг друга, то есть имеют одинаковую конструктивную форму и одинаковый вес, при этом центральные части корпуса ЛАБ имеют угол, расходящийся в стороны около 60 градусов, а крайние части корпуса ЛАБ имеют угол направленный вниз около 30 градусов относительно центральных частей корпуса ЛАБ (также крайние части корпуса имеют возможность подниматься, образуя с центральными частями ЛАБ единую плоскость), кабину для пилотов, грузопассажирские и топливные отсеки, выступающий конструктивный элемент, далее ВКЭ, с возможностью перемещения в стороны, назад и вперед (что будет приводить к уменьшению или увеличению его длины), опорный двигатель(и) реактивного типа с возможностью изменения своего положения относительно ВКЭ и/или с возможностью управления отклонением вектора тяги, маршево-маневровые двигатели вентиляторного или реактивного типа с возможностью управления отклонением вектора тяги, маневровые двигатели, а также убирающиеся или неубирающиеся шасси (их конструкция непринципиальна, как и их наличие).
Сущность изобретения поясняется чертежами.
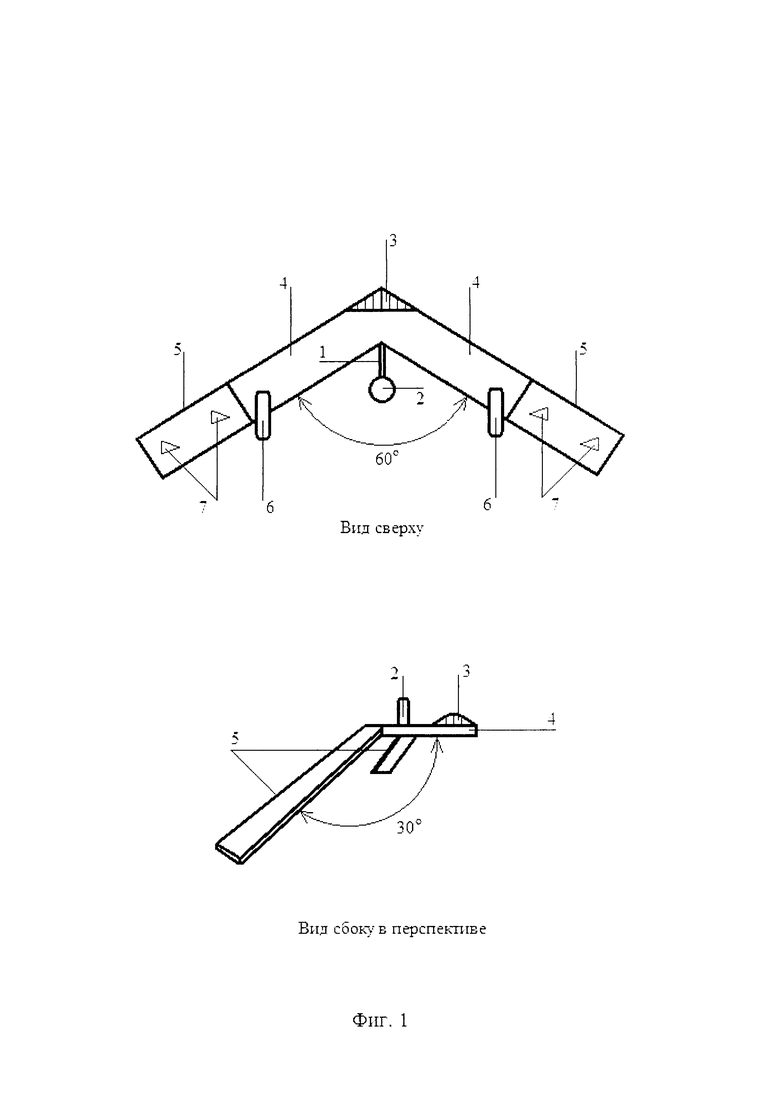
На чертеже Фиг. 1 изображен ЛАБ, вид сверху и вид сбоку в перспективе, содержащий ВКЭ 1 с установленным на его заднем конце опорным двигателем 2 (реактивного типа), кабину для пилотов 3, центральные части корпуса 4, крайние части корпуса 5, маршево-маневровые двигатели 6 в данном случае турбореактивные с возможностью управления отклонением вектора тяги, а также маневровые (реактивные) двигатели 7. На данном чертеже показан угол, под которым расположены центральные части 4 корпуса ЛАБ, этот угол равен примерно шестидесяти градусам, а также показан угол, под которым расположены крайние части 5 корпуса ЛАБ относительно центральных частей 4, этот угол равен примерно тридцати градусам.
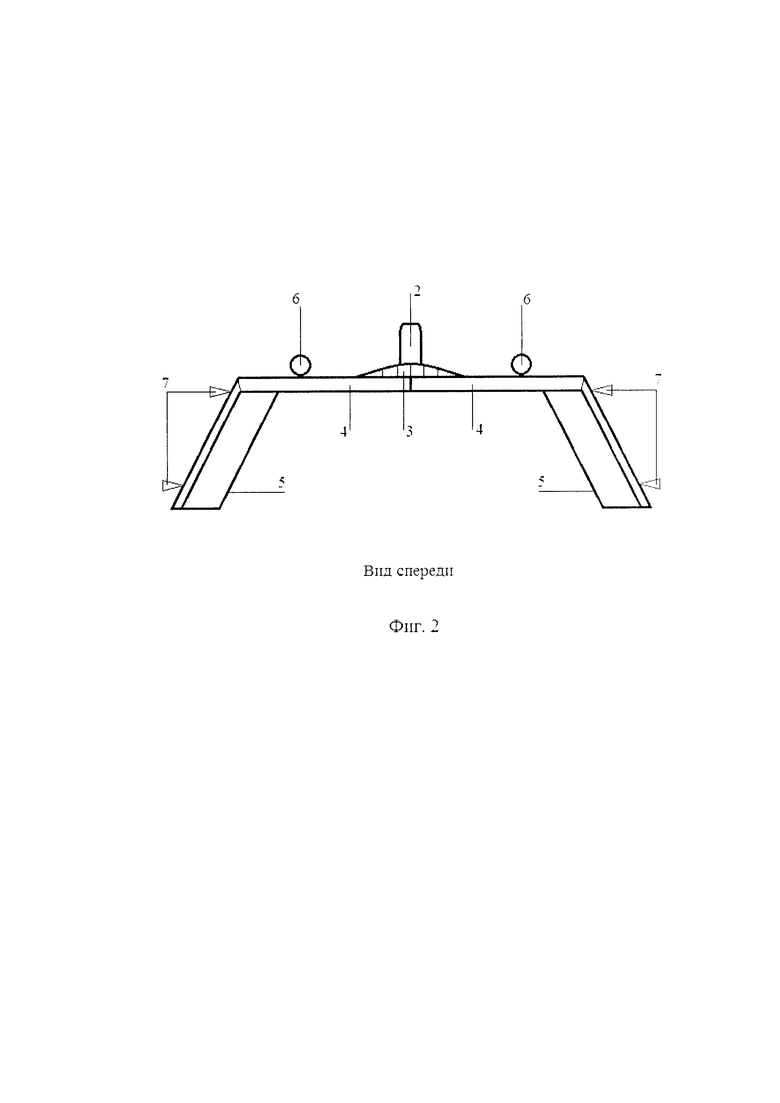
На чертеже Фиг. 2 изображен ЛАБ, вид спереди, содержащий опорный двигатель 2 (изображенный на заднем плане данного изобретения), кабину для пилотов 3, центральные части 4 корпуса ЛАБ, крайние части 5 корпуса ЛАБ, маршево-маневровые двигатели 6 в данном случае турбореактивные двигатели с возможностью управления отклонением вектора тяги, которые расположены на центральных частях 4 (их практическое расположение на корпусе ЛАБ непринципиально и имеет на этом чертеже наглядный характер), а также содержащий маневровые (реактивные) двигатели 7.
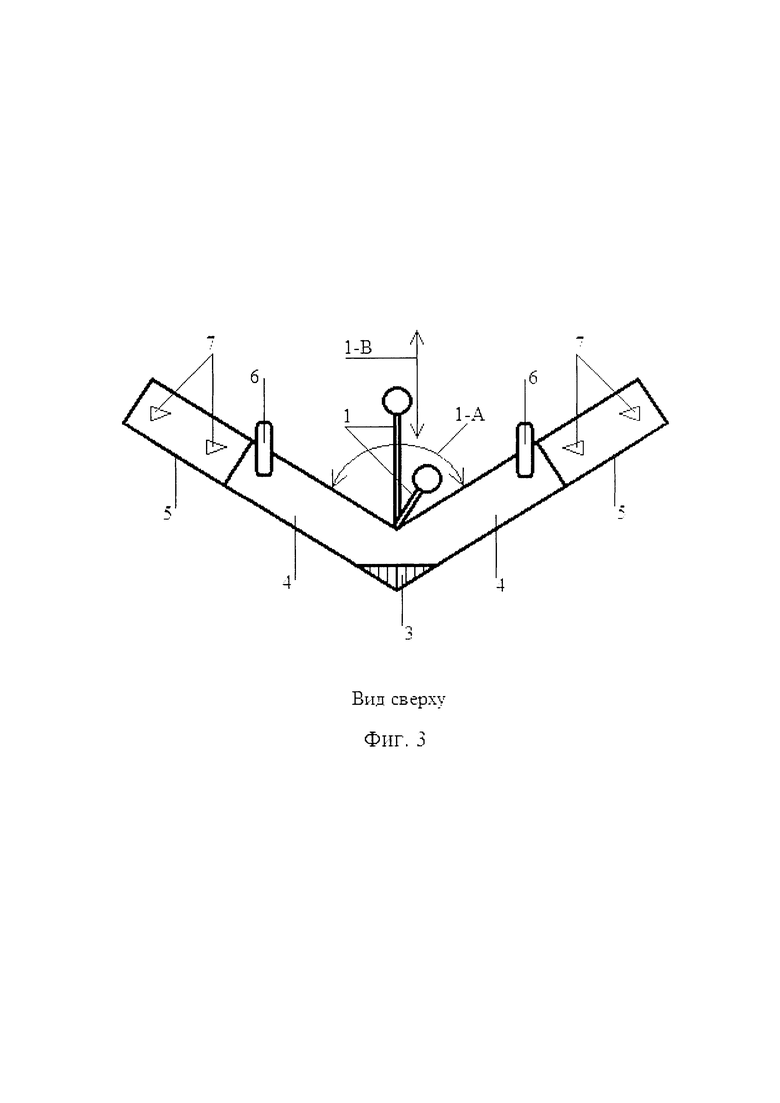
На чертеже Фиг. 3 изображен ЛАБ, вид сверху, содержащий выступающий конструктивный элемент 1, центральные части 4 корпуса Л АБ, крайние части 5 корпуса ЛАБ, маршево-маневровые двигатели 6 и маневровые (реактивные) двигатели 7. На данном чертеже показано, как именно следует регулировать развесовку всего корпуса ЛАБ, это делается посредством перемещения ВКЭ 1 в стороны 1-А (так регулируется крен), а также посредством перемещения ВКЭ 1 вперед или назад 1-В, то есть, укорачивая его или удлиняя относительно корпуса ЛАБ (так регулируется тангаж). В то время как самопроизвольный разворот, происходящий при зависании ЛАБ в воздухе, предотвращается маневровыми двигателями 7.
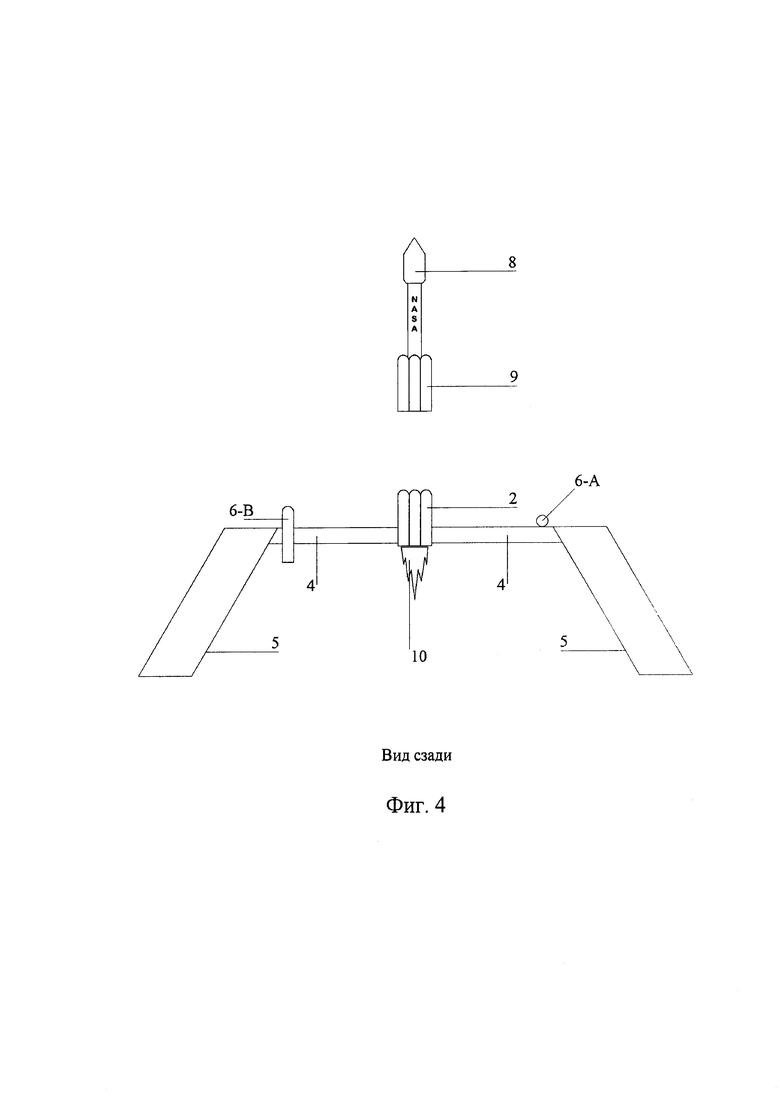
На чертеже Фиг. 4 изображен ЛАБ, вид сзади, содержащий ВКЭ 1 (на чертеже не показан) с установленными на его заднем конце опорными двигателями 2 (реактивного типа), центральные части 4 корпуса ЛАБ и крайние части 5 корпуса ЛАБ. На данном чертеже показаны сравнительные размеры космической ракеты 8 (изображена американская ракета-носитель Falcon Heavy сверхтяжелого класса) и ЛАБ вид сзади. При этом реактивные двигатели 9 аналогичны но своей мощности опорным двигателям 2 реактивного типа, что наглядным образом демонстрирует преимущества ЛАБ перед космическими ракетами в грузоподъемности и экономичности. А также, безусловно, в размерах жилого и рабочего пространства, ведь ЛАБ практически полностью используется по прямому назначению, в отличие от ракет, которые выводят совсем небольшие обитаемые модули. Кроме того, в случае необходимости, в качестве дополнительного источника мощности для взлета вверх могут быть использованы и маршево-маневровые двигатели 6, которые в данном случае изображены как в горизонтальном 6-А положении, так и в вертикальном 6-В положении. Также для наглядности на данном чертеже изображена реактивная струя 10 направленная вниз - это рабочее положение опорных двигателей 2 в условиях планетарного притяжения.
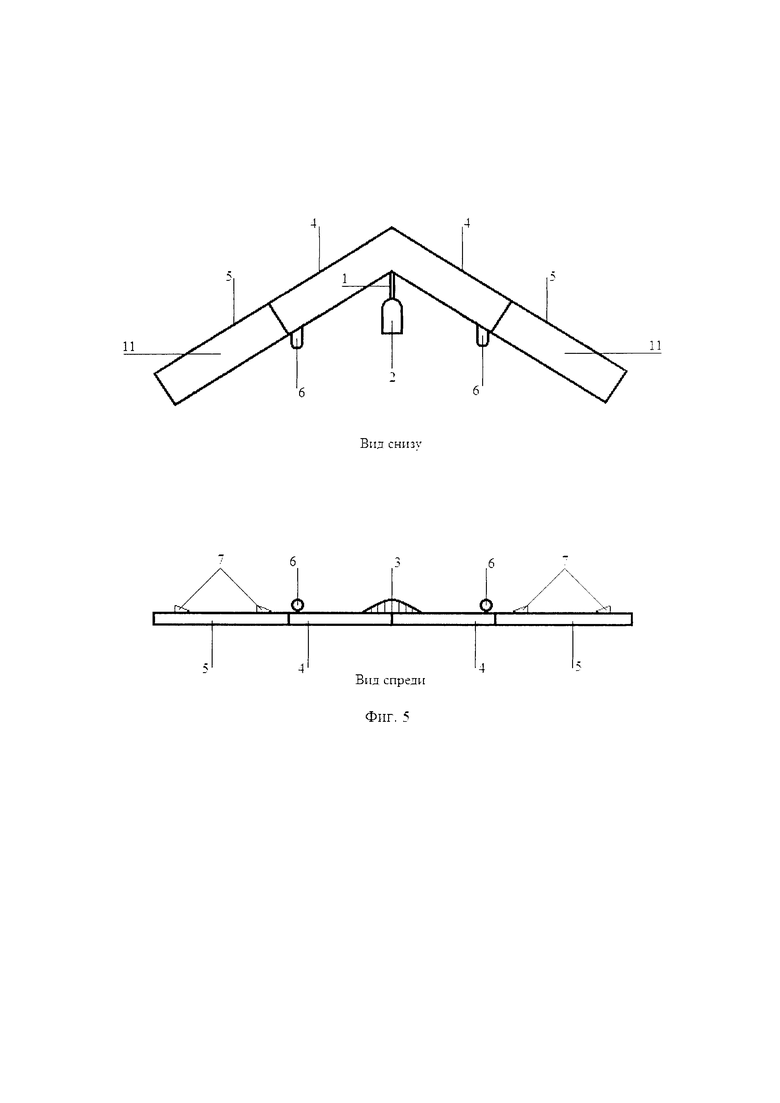
На чертеже Фиг. 5 изображен ЛАБ, вид сверху и снизу, с поднятыми крайними частями 5 корпуса ЛАБ, которые в поднятом положении образуют единую плоскость с центральными частями 4 корпуса ЛАБ. Это целесообразно делать тогда, когда ЛАБ эксплуатируется в космическом пространстве, в котором не требуется сохранения равновесия для ЛАБ, а также для предотвращения возможных повреждений крайних частей 5 корпуса ЛАБ (их передних частей 11) летящими навстречу случайными метеоритами. Опорный двигатель(и) 2 также занимает горизонтальное положение главным образом во время полета изобретения, ибо его рабочее положение (реактивной струей вниз) в космосе не актуально по той же причине - отсутствие необходимости в сохранении равновесия корпуса ЛАБ.
Изобретение используется следующим образом: После загрузки грузопассажирских и топливных отсеков ЛАБ расположенных в центральных частях 4 корпуса и/или в крайних частях 5 корпуса примерно одинаковым но весу грузом, топливом и пассажирами. Пилоты запускают опорный двигатель (или двигатели) 2 реактивного типа, установленный на заднем конце выступающего конструктивного элемента 1. После чего ЛАБ набирает нужную для его полета высоту, а далее убираются шасси (если используются именно убирающиеся шасси), затем пилотами включаются маршево-маневровые двигатели 6 вентиляторного или реактивного типа с возможностью управления отклонением вектора тяги и Летательный аппарат балансирующий совершает свой полет. При этом для стабилизации пространственного положения корпуса ЛАБ (в воздухе), используется возможность перемещения ВКЭ 1 в стороны, назад и вперед. А также используются маневровые двигатели 7, которые предотвращают самопроизвольный разворот ЛАБ, возможный при его зависании в воздухе.
К технико-экономическим преимуществам данного изобретения, прежде всего, следует отнести его неприхотливость относительно площадки для старта, так как ЛАБ предназначен для самостоятельного вертикального взлета. Что, в свою очередь, делает его пригодным для массового освоения космоса, например, готовое изделие этого изобретения в целях экономии сможет стартовать на околоземную орбиту прямо с площадки при заводе-изготовителе. Более того, подобный Летательный аппарат балансирующий сможет изготавливаться практически на любом авиационном заводе, что, собственно, и предопределяет массовость в освоении как минимум околоземного пространства, а также Луны. При этом экономическая выгода по сравнению с современными космическими ракетами просто колоссальная, ведь подобные ракеты не только сложны и дороги в изготовлении, но и одноразовые! Что лишает их конкурентных преимуществ с точки зрения стоимости освоения ближнего космоса, даже в их многоразовом исполнении, потому что все ракеты вынуждены использовать разгонный режим, потребляющий значительное количество топлива, необходимый, в том числе для удержания ракеты в вертикальном положении. Плюс к этому расходу топлива добавляется еще и повышенный расход топлива при использовании многоразовых ступеней корабля, что связано с реактивным спуском, то есть торможением с помощью двигателей, потому что подобное торможение обусловлено конструкцией многоразовых ступеней. Так как их конструкция вынуждает приземляться исключительно по баллистической траектории. И, безусловно, все современные космические ракеты нуждаются в космодромах или специальных платформах, которые оборудованы дорогостоящими и громоздкими с точки зрения инфраструктуры стартовыми комплексами. В то время как предлагаемое мною изобретение не будет нуждаться в стартовых комплексах, а также способно будет совершать взлет на околоземную орбиту в спокойном режиме, то есть без разгонного режима, отсутствие которого будет компенсировано совокупной работой опорного(ых) и маршево-маневровых двигателей. В частности, маршево-маневровые двигатели направленные вниз, уменьшат нагрузку на опорный двигатель, поэтому ему не понадобится разгонный режим для вывода ЛАБ на околоземную орбиту. А управляемый спуск Летательный аппарат балансирующий, благодаря совокупной работе его маршево-маневровых и опорного(ых) двигателей сможет совершать спиралеобразным способом с максимально большим радиусом полета (до вхождения ЛАБ в плотные слои атмосферы). Таким образом, нивелируя повышенное гравитационное притяжение, возникающее при спуске космических аппаратов на Землю. К тому же при необходимости в ЛАБ дополнительно можно будет использовать раскладывающиеся крылья, которые обеспечат ЛАБ подъемную силу, а значит, позволят ему совершать, в том числе и скользящий или планирующий спуск с околоземной орбиты. Кроме того, в случае невозможности подобрать оптимальную мощность для работы реактивного опорного двигателя(ей), можно использовать дополнительно передний уравновешивающий (опорный двигатель) двигатель или двигатели реактивного типа, которые предотвратят опрокидывание ЛАБ вперед. Данные дополнительные двигатели поясняются чертежом Фиг. 6.
На чертеже Фиг. 6 изображен ЛАБ, вид сверху и сбоку в перспективе, содержащий ВКЭ 1 с установленным на его заднем конце опорным двигателем 2 (реактивного типа), кабину для пилотов 3, центральные части корпуса 4, крайние части корпуса 5, маршево-маневровые двигатели 6 в данном случае турбореактивные с возможностью управления отклонением вектора тяги, а также маневровые (реактивные) двигатели 7. На данном чертеже показаны дополнительные передние уравновешивающие реактивные двигатели 12, которые предотвращают опрокидывание ЛАБ вперед.
В тех же случаях, когда конструкция многоразовых ступеней космических ракет предусматривает использование раскладывающихся крыльев, например, как это предполагается делать в многоразовой крыла той ступени ракеты «Крыло-СВ». Ссылка на данное изобретение в Wikipedia: https://ru.m.wikipedia.org/wiki/%D0%9A%D1%80%D1%8B%D0%BB%DQ%BE-%D0%A1%D0%92
То данные многоразовые крылатые ступени, опять же, будут нуждаться в специально оборудованных аэродромах, что не всегда целесообразно, по крайней мере, если речь идет об использовании многоразового военного космического корабля, а не просто гражданского космического грузовика.
Также данное изобретение можно будет использовать в качестве небольшого (в целях малозаметности) ракетоносителя, который сможет патрулировать морские границы РФ на значительном удалении от берега. Оставаясь в то же время малозаметной целью для радаров вероятного противника, благодаря возможности осуществлять свое патрулирование вдоль морских границ России на предельно малой высоте от морской глади.
Более того, для лучшего понимания принципа работы ЛАБ, а значит и лучшего понимания его преимуществ перед традиционными космическими ракетами, следует также отметить и особенность, с которой он осуществляет свой подъем. А именно, суть подъема заключается в том, что ЛАБ свой вес вверх тянет, в то время как ракеты традиционной компоновки толкают свой вес из-под низа. Наглядно подобную разницу можно понять на примере прицепа или телеги, которые значительно легче тянуть за собой, чем толкать их перед собой! Поэтому когда реактивные двигатели вынуждены толкать ракету вверх, то им приходиться тратить дополнительные усилия (тратя лишнее топливо) для преодоления встречного аэродинамического сопротивления. ЛАБ же себя поднимает иначе, помимо снимающей лишнее напряжение правильной развесовки корпуса и использования принципа рычага, заявленное изобретение не тратит дополнительных усилий на удержание равновесия и на разгонный режим, которые ему просто не требуются! Что, собственно, и делает ЛАБ полноценным летательным аппаратом, который способен с одинаковой простотой осуществлять взлет и посадку, маневрирование и зависание, а также полет на любые расстояния.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
| Одноступенчатая, кольцевая, многоразовая РН для вывода в космос полезной нагрузки | 2023 |
|
RU2831436C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ ОБЪЕКТОВ НА ОКОЛОЗЕМНУЮ ОРБИТУ И МНОГОРАЗОВЫЙ СОСТАВНОЙ АЭРОКОСМИЧЕСКИЙ РАКЕТНЫЙ САМОЛЕТ-НОСИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (АЭРОКОСМИЧЕСКАЯ СИСТЕМА " НУР-САИД") | 2001 |
|
RU2232700C2 |
| Способ запуска на орбиту полезной нагрузки и многоразовая эжекторная ступень РН для его осуществления | 2019 |
|
RU2734965C1 |
| МНОГОРАЗОВАЯ РАКЕТА-НОСИТЕЛЬ | 2019 |
|
RU2712720C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
| Транспортное средство для межпланетного сообщения (варианты) | 2015 |
|
RU2621805C2 |
| МНОГОРАЗОВАЯ РАКЕТА-НОСИТЕЛЬ (ВАРИАНТЫ) | 2017 |
|
RU2684839C1 |
| Устройство обеспечения посадки возвращаемой многоразовой ступени ракеты-носителя | 2024 |
|
RU2841245C1 |
| СПОСОБ СПАСЕНИЯ РАКЕТ-НОСИТЕЛЕЙ МНОГОРАЗОВОГО ПРИМЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2202500C2 |

Изобретение относится к области авиации. Летательный аппарат балансирующий включает две части корпуса, которые зеркально отображают друг друга, то есть имеют одинаковую конструктивную форму и одинаковый вес. Центральные части корпуса имеют угол, расходящийся в стороны, около 60 градусов. Крайние части корпуса имеют угол, направленный вниз, около 30 градусов относительно центральных частей корпуса и имеют возможность подниматься. Имеется кабина для пилотов, грузопассажирские и топливные отсеки. Опорный(е) двигатель(и) реактивного типа выполнен(ы) с возможностью отклонения вектора тяги и изменения своего положения относительно выступающего конструктивного элемента, выполненного с возможностью перемещения в стороны, назад и вперед. Имеются маршево-маневровые двигатели, выполненные вентиляторного или реактивного типа с возможностью управления отклонением вектора тяги, маневровые двигатели, а также шасси. Изобретение направлено на повышение грузоподъемности и обеспечение экономичного расхода авиационного топлива. 6 ил.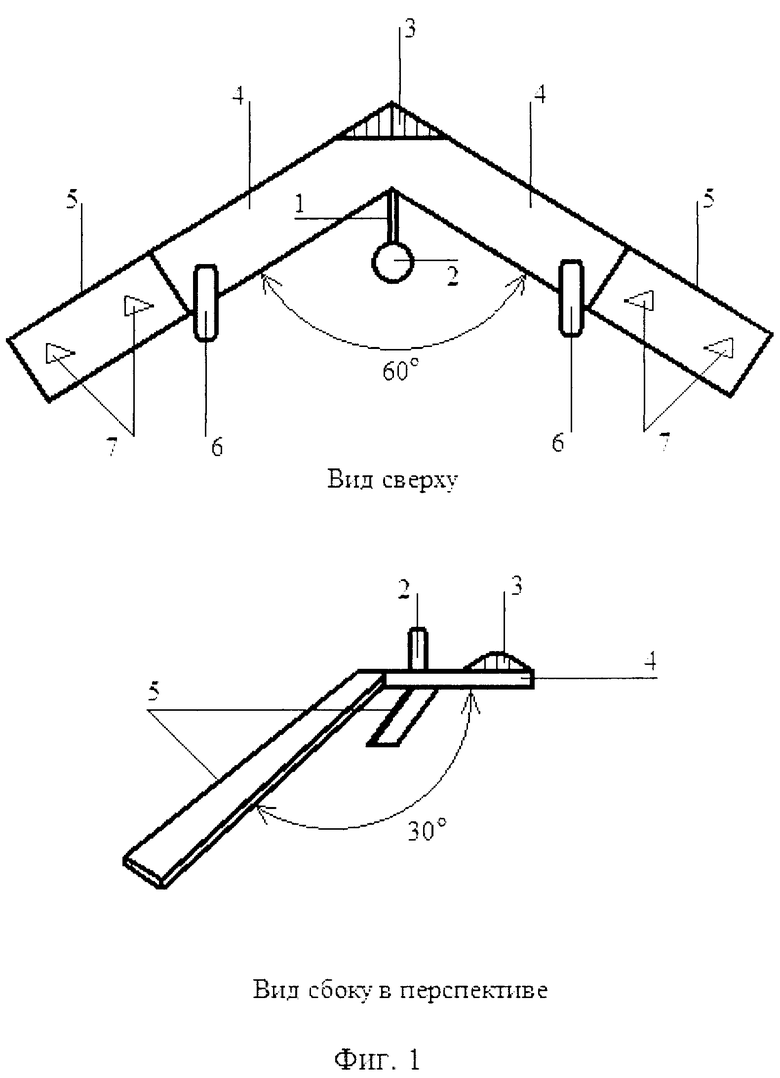
Летательный аппарат балансирующий, включающий в себя две части корпуса, которые зеркально отображают друг друга, то есть имеют одинаковую конструктивную форму и одинаковый вес, при этом центральные части корпуса имеют угол, расходящийся в стороны, около 60 градусов, а крайние части корпуса имеют угол, направленный вниз, около 30 градусов относительно центральных частей корпуса так, что крайние части корпуса имеют возможность подниматься, образуя с центральными частями корпуса единую плоскость, кабину для пилотов, грузопассажирские и топливные отсеки, выступающий конструктивный элемент с возможностью перемещения в стороны, назад и вперед, опорный(е) двигатель(и) реактивного типа с возможностью изменения своего положения относительно выступающего конструктивного элемента и/или с возможностью управления отклонением вектора тяги, маршево-маневровые двигатели вентиляторного или реактивного типа с возможностью управления отклонением вектора тяги, маневровые двигатели, а также шасси, опорный(е) двигатель(и) реактивного типа расположен(ы) на заднем конце выступающего конструктивного элемента, а упомянутый корпус сбалансирован с помощью рациональных углов между центральными его частями и крайними частями корпуса относительно центральных частей.
| US 10384796 B2, 20.08.2019 | |||
| WO 2019227046 A1, 28.11.2019 | |||
| US 9079661 B2, 14.07.2015 | |||
| JP 3167098 A, 18.07.1991 | |||
| WO 2014176622 A1, 06.11.2014 | |||
| МНОГОРАЗОВАЯ РАКЕТА-НОСИТЕЛЬ (ВАРИАНТЫ) | 2017 |
|
RU2684839C1 |
| US 20160244188 A1, 25.08.2016. | |||

