Область техники, к которой относится изобретение
Настоящее изобретение относится к способу автоматической оценки присутствия пены в посудомоечной машине согласно вступительной части п. 1 формулы изобретения.
Настоящее описание также относится к посудомоечной машине, выполненной с возможностью внедрения способа автоматической оценки присутствия пены в посудомоечной машине согласно вступительной части п. 11 формулы изобретения.
Настоящее описание также относится к системе, состоящей из посудомоечной машины и портативного устройства, которое может удерживать пользователь, и выполненной с возможностью внедрения способа автоматической оценки присутствия пены в посудомоечной машине согласно вступительной части п. 14 формулы изобретения.
Уровень техники
Из существующего уровня техники известны посудомоечные машины, которые оснащены оптическими устройствами, например, фотокамерами, телекамерами или видеокамерами, расположенными в неподвижном или подвижном положении относительно резервуара для мойки с целью проверки веса посуды или степени чистоты посуды.
Например, такие посудомоечные машины описаны в документах WO2016008699 А1 и US 2012/0138092 А1. Кроме того, в документе US 2005/028850 А1 описан способ автоматической оценки присутствия пены в посудомоечной машине, содержащей зону мойки, имеющую область, предназначенную для сбора моющей среды.
Использование вышеуказанной посудомоечной машины предусматривает загрузку посуды пользователем в зону мойки посудомоечной машины и использование моющего вещества.
Такое моющее вещество обычно помещают внутрь дозатора, который оснащен соответствующей дверцей, открывающейся автоматически после того, как пользователь закроет дверцу посудомоечной машины и запустит предварительно выбранную программу мойки.
К числу различных моющих средств, представленных в настоящее время на рынке, относятся следующие моющие средства: - порошкообразные моющие средства;
- жидкие моющие средства;
- гелеобразные моющие средства;
- таблетки для мойки посуды;
- ополаскиватели, способствующие сушке посуды. Проблема существующего уровня техники
Перечисленные выше моющие средства имеют разные химические/физические характеристики в зависимости от входящих в их состав химических веществ и различную растворимость.
Программы мойки, используемые в существующих посудомоечных машинах, которые содержат этапы наполнения водой, нагрева, задания интенсивности мойки и сушки, аттестуются посредством предполагаемого использования моющего средства, имеющего усредненные характеристики. Кроме того, предусматривается использование моющего средства конкретного типа, и что посуда, устанавливаемая в посудомоечную машину, не содержит следов моющих средств и продуктов других типов, способных образовывать пену в посудомоечной машине.
Однако в процессе использования может возникнуть ряд нежелательных условий, которые будут способствовать образованию пены внутри зоны мойки посудомоечной машины. Например, к некоторым условиям, которые могли бы вызвать образование пены во время цикла мойки, относятся:
- использование непригодного моющего средства,
- утечки и/или расплескивание ополаскивателя после его загрузки в дозатор,
- мойка чистой посуды, которая содержит остатки моющего средства, и
- использование большего количества моющего средства, превышающего указанный максимальный уровень.
Присутствие пены внутри зоны мойки посудомоечной машины может вызвать увеличение уровня шума во время работы насоса для мойки.
Кроме того, присутствие пены может влиять на нормальное выполнение цикла мойки, что ведет к ухудшению характеристик мойки.
Кроме того, в случае образования пены в зоне мойки существует определенный риск, что в конце мойки на посуде будут присутствовать остатки моющего вещества.
Необходимо отметить, что в случае образования излишнего количества пены внутри зоны мойки, могут возникать проблемы в работе посудомоечной машины с соответствующим риском поломки посудомоечной машины.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы устранить недостатки существующего уровня техники.
Другая задача настоящего изобретения состоит в том, чтобы внедрить способ, посудомоечную машину и систему автоматической оценки присутствия пены в посудомоечной машине для препятствования вышеописанным проблемам существующего уровня техники.
Такие задачи можно решить с помощью, способа, посудомоечной машины и системы автоматической оценки присутствия пены в посудомоечной машине согласно приведенным ниже п.п. 1, 11 и 14 формулы изобретения, соответственно.
Преимущества изобретения
С помощью варианта выполнения настоящего изобретения можно внедрить способ и соответствующие посудомоечную машину и систему, состоящую из посудомоечной машины и устройства, которое пользователь может переносить вручную, что позволяет:
- исключить увеличение уровня шума посудомоечной машины;
- оптимизировать характеристики мойки и
- обеспечить очистку посуды от загрязнений и моющего вещества. Краткое описание чертежей
Характеристики и преимущества настоящего изобретения станут понятными из приведено ниже подробного описания возможного практического варианта выполнения, показанного в качестве неограничивающего примера на чертежах, где:
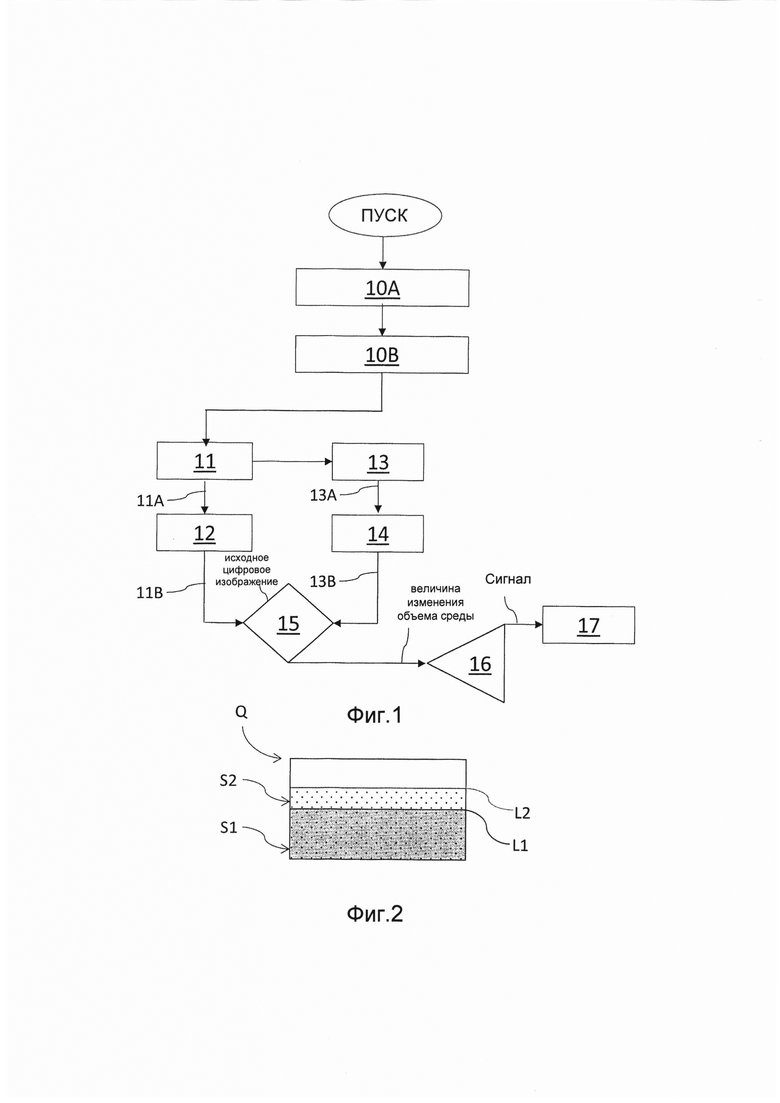
фиг. 1 - схема последовательности этапов способа согласно настоящему изобретению;
фиг. 2 - схематическое изображение сектора цифрового изображения, полученного согласно этапу способа по настоящему изобретению;
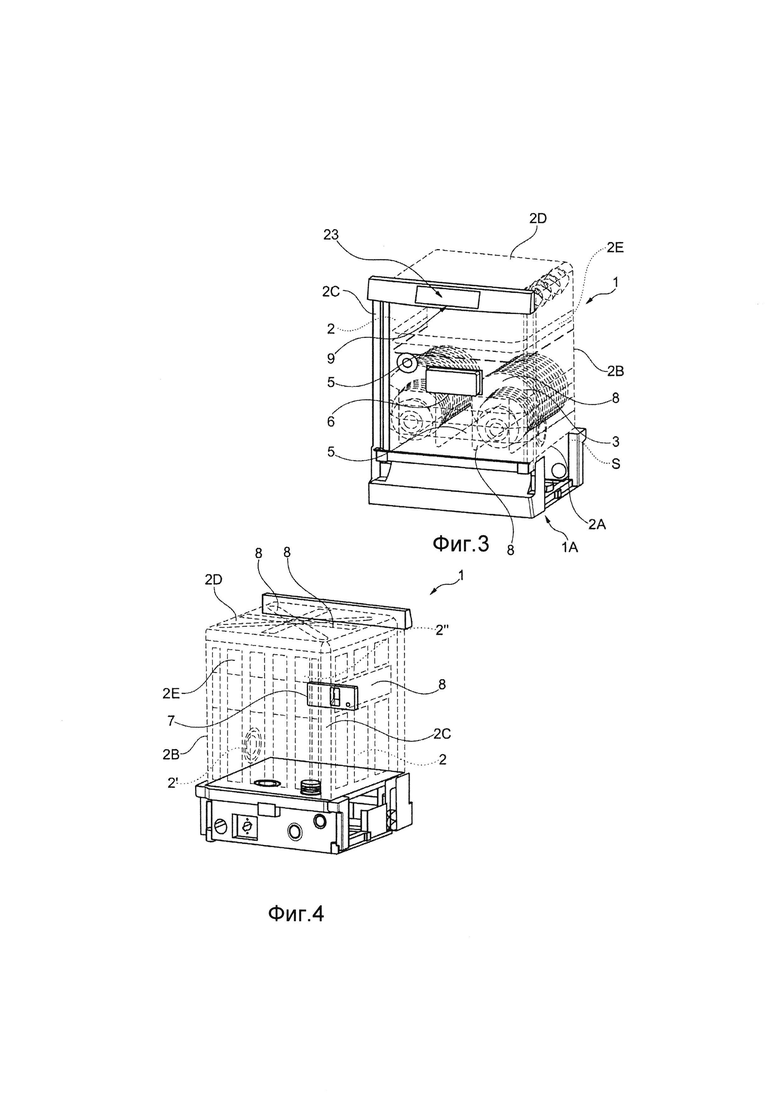
фиг. 3 - перспективный вид спереди посудомоечной машины встроенного типа без отделочных панелей, выполненной с возможностью внедрения способа по фиг. 1;
фиг. 4 - перспективный вид сзади посудомоечной машины по фиг. 3 без некоторых компонентов посудомоечной машины и посуды;
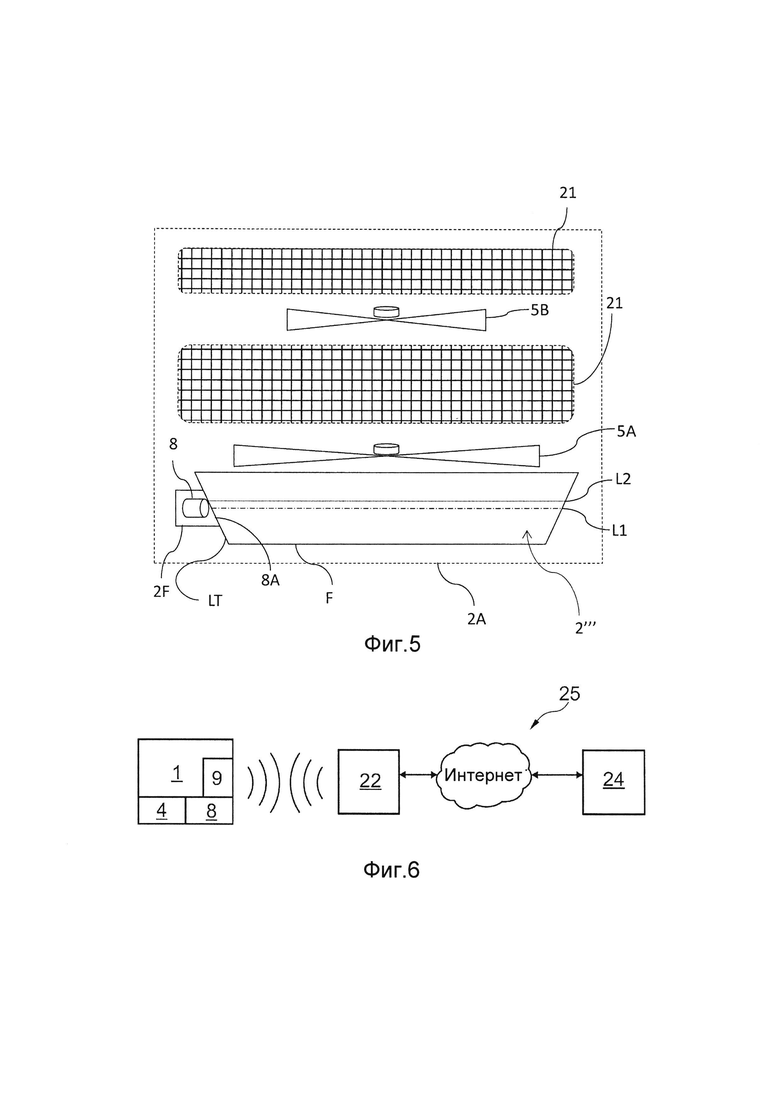
фиг. 5 - схематический вид сбоку посудомоечной машины по фиг. 3;
фиг. 6 - схема системы согласно настоящему изобретению.
Осуществление изобретения
Даже неявно выраженные отдельные характеристики, описанные со ссылкой на конкретные варианты выполнения, следует рассматривать как вспомогательные средства и/или характеристики, взаимозаменяемые с другими характеристиками, описанными со ссылкой на другие варианты выполнения.
Со ссылкой на приложенные фигуры 3, 4 и 5 поз. 1 обозначает посудомоечную машину, например, посудомоечную машину, встроенную в предмет кухонной мебели, показанную без облицовочных панелей для лучшего понимания внутренних объемов.
Такая посудомоечная машина 1 содержит зону 2 мойки и дверцу 3, которая в закрытом состоянии связана с зоной 2 мойки.
Посудомоечная машина 1 имеет основание 1А, в целом предназначенное для размещения необходимых механизмов/устройств с целью выполнения основных операций машины 1.
Зона 2 мойки ограничивает объем, внутри которого расположена посуда S.
В частности, зона 2 мойки ограничена множеством стенок, таких как стенка 2А основания, боковые стенки 2В и 2С, верхняя стенка 2D и задняя стенка 2Е, и определяет верхний участок 2'' и нижний участок 2'.
Термин «верхний/нижний» следует истолковывать с учетом правильной установки и условий использования посудомоечной машины 1. В подобной ситуации термин «верхний» относится к более удаленной части от основания 1А, в то время как термин «нижний» относится к более близкой части к основанию 1А.
Дверца 3, которую можно приводить в действие вручную или с помощью электрического сервопривода, служит для герметичного закрывания зоны 2 мойки с целью исключения потерь моющей жидкости во время выполнения программы мойки.
В приведенном ниже описании термин «S» означает, например, тарелку, столовые приборы, стакан, кастрюлю и т.д.
Крыльчатки 5А, 5В являются крыльчатками, по существу, известного типа, поэтому их описание не приводится. Следует отметить, что в зоне 2 мойки могут быть расположены одна или, предпочтительно, две крыльчатки 5А, 5В. В частности, нижняя крыльчатка 5А расположена в нижней зоне 2' вблизи основания 1А, и верхняя крыльчатка 5В расположена в верхней зоне 2'', предпочтительно в нижней части верхней зоны 2''.
Нижняя зона 2' зоны 2 мойки во время работы посудомоечной машины 1 определяет зону 2''' сбора моющей среды. В частности, такая зона 2''' сбора моющей среды расположена между нижней крыльчаткой 5А и стенкой 2А основания. Со ссылкой на фиг. 5 зона 2''' сбора моющей среды выполнена в виде поддона для сбора моющей воды, который сначала очищается во время всасывания воды из водопроводной сети в начале цикла мойки и в дальнейшем загрязняется остатками моющего средства загрязнений по окончании цикла мойки.
В нижней зоне 2' и/или верхней зоне 2'' установлена соответствующая корзина 21 с держателями для посуды, которая предназначена для удерживания различной посуды S согласно способам, известным из существующего уровня техники, поэтому ее описание не приводится.
Термин «корзина 21 с держателями для посуды» означает устройство и/или вспомогательные средства, предназначенные для их позиционирования и, следовательно, пригодные для поддержки посуды S.
Такие корзина и/или вспомогательные средства должны соответствовать размерам зоны 2 мойки посудомоечной машины 1.
Посудомоечная машина 1 содержит дозатор 6, выполненный с возможностью определения пригодного объема для размещения продуктов или моющих средств, необходимых для мойки объектов, в частности, посуды S.
Такой дозатор 6 может содержать одно или несколько отделений, каждое из которых предназначено для размещения конкретного моющего продукта.
Согласно варианту выполнения дозатор 6 содержит дверцу 7, которая выполнена с возможностью перемещения между закрытым положением и положением свободного доступа к внутреннему объему дозатора 6.
Например, в закрытом положении дверцы 7 исключается выпуск продуктов из соответствующих отделений, в то время как в открытом положении дверцы 7 возможен выпуск таких моющих продуктов с того момента, когда дверца 3 находится в закрытом положении, и выбрана программа Р мойки, с помощью которой выполняется мойка посуды S.
Другими словами, перемещение дверцы 7 между закрытым положением и открытым положением контролируется механическим и/или электрическим путем с помощью блока 4 управления, исходя из закрывания дверцы 3 посудомоечной машины 1.
Согласно варианту выполнения, а также со ссылкой на фиг. 3 и 4, дозатор 6 расположен на дверце 3, в частности, на стороне, обращенной к зоне 2 мойки, на заданной высоте. В частности, дозатор 6 помещен внутрь дверцы 3 по ее толщине.
Посудомоечная машина 1 содержит блок 4 управления, например, расположенный внутри дверцы 3 по ее толщине и снабженный материнской платой, на которой размещены обычные электрические и электронные устройства, которые могут включать в себя центральный процессор, группу портов ввода/вывода для приема и выдачи данных в запоминающем устройстве, причем последнее имеет специальный участок для постоянного хранения, по меньшей мере, одной программы мойки.
Программа Р мойки проистекает из одного или комбинации нескольких следующих параметров:
- продолжительность этапа мойки;
- давление насоса для мойки
- температура на этапах мойки и сушки;
- объем загружаемой воды в литрах.
Программа Р также может содержать другие параметры, которые не указаны в целях упрощения описания.
Блок 4 управления является блоком, предназначенным для управления и слежения за рабочими функциями посудомоечной машины 1.
В варианте выполнения настоящего изобретения предусмотрено, что в запоминающем устройстве блока 4 управления также постоянно хранится база данных, в которой с помощью соответствующих параметров хранится информация об эксплуатационных данных, собранных датчиками, установленными внутри посудомоечной машины. Ниже описаны различные датчики, предназначенные для сбора параметров посудомоечной машины во время ее эксплуатации, например, оптические устройства.
Для того чтобы обеспечить внедрение выбранной программы мойки, посудомоечная машина 1 содержит насос, например, расположенный в основании 1А, который может быть соединен с впуском водопроводной сети согласно способам, известным специалисту в рассматриваемой области, описание которых не приводится.
Такой насос управляется блоком 4 управления и служит для создания течения воды в крыльчатки 5А, 5В, расположенные в зоне мойки.
Посудомоечная машина 1 содержит одно или несколько оптических устройств 8, способных получать цифровые изображения зоны 2 мойки.
По предпочтительному аспекту изобретения оптические устройства 8 расположены таким образом, что их оптика обращена к зоне 2''' сбора моющей среды, которая, как упомянуто выше, расположена между нижней крыльчаткой 5А и стенкой 2А основания.
В частности, в каждой стенке 2А, 2В, 2С, 2D и/или 2Е зоны 2 мойки по ее толщине могут быть размещены одно или несколько вышеуказанных оптических устройств 8.
С этой целью для каждого оптического устройства 8 предусмотрено гнездо 2F.
Указанное гнездо 2F ограничивает пригодный объем для размещения соответствующего оптического устройства, и, предпочтительно, для закрывания оптики оптического устройства предусмотрена пропускающая свет закрывающая панель 8А.
Такая закрывающая панель 8А, например, изготовлена из стекла, или пластика или материалов, имеющих сходные технические характеристики.
Закрывающая панель 8А предпочтительно расположена, по существу, заподлицо или немного выступает от поверхности стенки 2А, 2В, 2С, 2D и 2Е.
По предпочтительному варианту выполнения, схематически показанному на фиг. 5, оптические устройства 8 помещены внутри соответствующих гнезд 2F, образованных в корпусе посудомоечной машины 1 в зоне 2''' сбора моющей среды. Предпочтительно, зона 2''' сбора моющей среды выполнена подобно сборному поддону для моющей жидкости, который имеет нижнюю стенку F и боковую стенку LT (или ряд боковых стенок), которые определяют контейнер для сбора жидкостей.
С конкретной ссылкой на фиг. 5 гнездо 2F, в котором расположены одно или несколько соответствующих оптических устройств 8, выполнено по толщине боковой стенки LT зоны 2''' сбора моющей среды, так что оптическое устройство 8 способно сканировать в поперечном направлении зону 2''' сбора моющей среды, например, для получения изображений заданного сектора Q. Соответственно, закрывающая панель 8А расположена, по существу, заподлицо с боковой стенкой LT зоны 2''' сбора моющей среды. Как вариант, согласно детально непоказанному примеру на приложенных фигурах, гнездо 2F может быть выполнено по толщине верхней стенки 2D посудомоечной машины 1.
В каждом гнезде 2F расположены все электрические и электронные элементы, необходимые для работы оптического устройства 8. Такая компоновка является преимущественной с учетом того, что она позволяет оптическому устройству 8 брать в кадр зону 2''' сбора моющей среды на протяжении всего цикла мойки.
Например, со ссылкой на фиг. 2 и 5 можно отметить, что оптическое устройство 8 имеет оптическое поле обзора, которое позволяет получать изображения зоны 2''' сбора моющей среды, которые попадают в такое заданное поле обзора, т.е. в заданный сектор Q, для получения изображения.
Назначение оптических устройств 8, используемых в посудомоечной машине 1, состоит в получении двухмерных изображений, которые являются фиксированными и/или последовательными, с заданными скоростями захвата, например, отдельную фотограмму или серию изображений или непрерывный поток изображений зоны 2''' сбора моющей среды.
В частности, оптические устройства 8 создают изображения моющей жидкости, наблюдаемые в поперечном направлении от боковой стенки LT зоны 2''' сбора моющей среды, так чтобы можно было видеть и четко идентифицировать, по меньшей мере, линию уровня, достигаемого поверхностью моющей жидкости.
Следует отметить, что вышеуказанные оптические устройства 8 предпочтительно создают изображения зоны 2''' сбора моющей среды на протяжении всего цикла мойки с заданными интервалами времени или предварительно установленной частотой создания изображений.
Такие оптические устройства 8 имеют связь с блоком 4 управления через порты ввода/вывода для направления полученных данных на блок 4 управления.
Такие оптические устройства 8, например, включены в состав фотокамеры и/или видеокамеры. Такие устройства известны в рассматриваемой области и поэтому не описаны подробно в настоящем изобретении.
Однако следует принять во внимание, что в настоящем описании фотокамера и/или видеокамера, которые могут использоваться в посудомоечной машине 1, предпочтительно способны создавать изображения со временем захвата меньше десятой доли секунды и соответствуют техническим условиям, согласно которым они могут функционировать также и в воде, т.е. фотокамера и/или видеокамера соответствуют стандарту IPx(1-8).
Как вариант или в комбинации с такими техническими условиями предусмотрено, что гнездо 2F, в котором расположены оптические устройства 8, выполнено таким образом, что оно является водогерметичным, например, используя способы уплотнения.
Посудомоечная машина 1 содержит интерфейс 9 пользователя, т.е. командный интерфейс, с помощью которого пользователь может осуществлять контроль и управление операциями и функциями самой посудомоечной машины.
С этой целью интерфейс 9 пользователя имеет связь с блоком 4 управления через порты ввода/вывода для приема данных, обработанных центральным процессором самого блока 4 управления.
В варианте выполнения интерфейс 9 пользователя является экраном 23, встроенным в посудомоечную машину 1, так чтобы он был виден пользователю во время нормального использования и/или с добавлением сигнального устройства (не показан на фигуре).
По варианту выполнения со ссылкой на фиг. 3 и 4 интерфейс 9 пользователя встроен в дверцу 3, так что экран обращен наружу от зоны 2 мойки.
Следует принять во внимание, что экран 23 интерфейса 9 пользователя выполнен с возможностью отображения светоиспускающей индикации, текстовых сообщений и/или отдельных или непрерывных изображений. В частности, изображения, которые могут отображаться на экране, могут быть изображениями зоны 2 мойки и соответствующих расположенных в ней объектов, обнаруживаемых оптическими устройствами 8. В частности, экран может быть сенсорного типа.
В другом варианте выполнения интерфейс 9 пользователя содержит одну или несколько аналоговых кнопок и/или комбинацию аналоговых/цифровых средств управления и/или комбинацию аналоговых/цифровых средств управления и экран, причем последний является экраном сенсорного типа.
Сигнальное устройство интерфейса 9 пользователя служит для сообщения пользователю об условиях и состояниях эксплуатации с помощью звукового сигнала.
В варианте выполнения посудомоечная машина 1 содержит приемопередающее устройство, выполненное с возможностью образования связи с проводной или беспроводной сетью. Например, беспроводная сеть может быть сетью на основе интернет-протокола через Wi-Fi соединение или WPAN (беспроводная персональная сеть) по протоколу Bluetooth.
Применительно к вышесказанному интерфейс 9 пользователя также содержит портативное устройство (т.е. переносимое пользователем вручную) 22, например, смартфон, планшет, ноутбук и аналогичные устройства.
Другими словами, интерфейс 9 пользователя содержит обычный управляющий интерфейс посудомоечной машины 1 и экран переносного устройства 22.
В частности, портативное устройство 22 содержит собственное приемопередающее устройство, выполненное с возможностью образования связи с приемопередающим устройством посудомоечной машины 1.
Согласно варианту выполнения портативное устройство 22, способное устанавливать связь с блоком 4 управления посудомоечной машины 1, также может соединяться по интернету, например, через инфраструктуру GSM, с одним или несколькими удаленными серверами 24, для выполнения архивирования, сохранения и/или обработки операций с данными по изображениям, полученным с помощью оптических устройств 8.
Другими словами, портативное устройство 22 пригодно для соединения как напрямую с посудомоечной машиной 1, так и с интернетом через инфраструктуру GSM. В таком случае предусмотрена система 25, содержащая посудомоечную машину 1 и портативное устройство 22, имеющие между собой связь с помощью сети GSM, Wi-Fi соединения и/или сети WPAN.
Следует отметить, что экран портативного устройства 22 выполнен с возможностью отображения светоиспускающей индикации, текстовых сообщений и/или изображений, полученных от оптических устройств 8.
В варианте выполнения настоящего изобретения, если интерфейс 9 пользователя также содержит портативное устройство 22, предусмотрено, что база данных может храниться, по меньшей мере, частично, предпочтительно полностью, в блоке памяти портативного устройства 22, в блоке массовой памяти сервера и/или в распределенном режиме в блоке памяти посудомоечной машины 1, портативного устройства 22 и сервера 23.
Согласно варианту выполнения блок 4 управления имеет связь с интерфейсом 9 пользователя (будь то интерфейс в форме конкретного экрана только посудомоечной машины 1 или интерфейс экрана портативного устройства 22), чтобы иметь возможность передавать информацию через интерфейс 9 пользователя о присутствии пены в посудомоечной машине 1 и/или модификациях, которые должны быть выполнены в отношении одного или нескольких указанных параметров мойки программы Р мойки.
Термин «один или несколько указанных параметров мойки программы Р мойки» означает в настоящем описании любое изменение параметров программы Р согласно идентификации присутствия пены в посудомоечной машине.
Со ссылкой на фиг. 1 способ автоматической оценки присутствия пены в посудомоечной машине 1 предпочтительно содержит этап 10А подачи моющего вещества в дозатор 6, т.е. предусматривается, что пользователь помещает в отделение дозатора 6 выбранное им моющее средство.
Предпочтительно, способ включает этап 10В автоматического наполнения зоны 2''' сбора моющей среды чистой водой, получаемой из водопроводной сети, соединенной с посудомоечной машиной 1.
Следует принять во внимание, что этапы способа, описанные ниже, а именно, этапы получения и обработки изображений, могут выполняться или непосредственно центральным процессором блока 4 управления или, более предпочтительно, центральным процессором портативного устройства пользователя также посредством интернет-соединения с центральными процессорами удаленных серверов, используемых для анализа и обработки данных.
После закрывания дверцы 7 дозатора 6, выбора программы Р с помощью интерфейса 9 и закрывания дверцы 3 посудомоечной машины 1 способ включает этап 11 получения первого цифрового изображения 11A, характеризующего первое состояние зоны 2''' сбора моющей среды.
Такой этап 11 получения изображения выполняется с помощью оптического устройства (устройств) 8, установленного внутри зоны 2 мойки. С этой целью блок 4 управления отслеживает этап получения изображения посредством управления оптическим устройством (устройствами) 8.
Способ также включает этап 12 цифровой обработки первого цифрового изображения 11А для получения первого обработанного изображения 11В, на котором первое обработанное изображение 11В идентифицирует величину первого объема среды, содержащейся в зоне 2''' сбора моющей среды. Необходимо отметить, что первое обработанное изображение 11В идентифицирует величину, характеризующую первый объем среды, содержащийся в зоне 2''' сбора моющей среды, т.е. объем среды, находящийся в зоне 2''' сбора моющей среды. Ясно, что объем среды может содержать как объем, занимаемый жидкой средой, например, водой, так и объем, занимаемый средой, по меньшей мере, частично в газообразном состоянии, например, в случае пены.
Способ включает этап 13 получения второго цифрового изображения 13А, характеризующего второе состояние зоны 2''' сбора моющей среды по истечении заданного интервала времени с момента выполнения этапа 11 получения первого цифрового изображения 11А. Предпочтительно, этап 13 получения второго цифрового изображения 13А выполняется после выпуска моющего средства в зону 2''' сбора моющей среды и/или после приведения в действие насоса для мойки с периодическими интервалами времени, предпочтительно, с интервалами минута и более.
Способ также включает этап 14 обработки второго цифрового изображения 13А для получения второго обработанного изображения 13В, на котором второе обработанное изображение 13В идентифицирует величину второго объема среды, содержащегося в зоне 2''' сбора моющей среды. Кроме того, в этом случае необходимо отметить, что второе обработанное изображение 11В идентифицирует величину, характеризующую второй объем среды, содержащийся в зоне 2''' сбора моющей среды, т.е. объем среды, находящийся в зоне 2''' сбора моющей среды. Ясно, что объем среды содержит как объем, занимаемый жидкой средой, например, водой, так и объем, занимаемый средой, по меньшей мере, частично в газообразном состоянии, например, в случае пены.
Способ включает этап 15 сравнения первого обработанного изображения 11В со вторым обработанным изображением 13В, т.е. величины первого объема среды с величиной второго объема среды для подсчета величины DV изменения объема среды между первым состоянием и вторым состоянием указанной зоны 2''' сбора моющей среды.
Дополнительно способ содержит этап 16 генерирования сигнала Sig о присутствии пены, характеризующего присутствие пены в зоне 2''' сбора моющей среды, когда величина DV изменения объема среды превышает заданное пороговое значение.
Способ также включает этап 17 модификации параметров мойки программы Р мойки посудомоечной машины 1, когда генерируется сигнал Sig о присутствии пены.
По предпочтительному варианту выполнения изобретения первое цифровое изображение 11A характеризует первое состояние зоны 2''' сбора моющей среды перед приведением в действие насоса для мойки. В частности, изображение 11A получают, как вариант, перед этапом 10В наполнения зоны 2''' сбора моющей среды чистой водой или после такого этапа, когда зона 2''' сбора моющей среды наполнена чистой водой (в обоих случаях перед приведением в действие насоса для мойки). Предпочтительно, способ включает этап автоматического приведения в действие насоса для мойки. Кроме того, второе цифровое изображение 13А характеризует второе состояние зоны 2''' сбора моющей среды по истечении заданного периода времени, следующего за этапом приведения в действие насоса для мойки.
По вышеописанному варианту выполнения изобретения способ включает этап 10В автоматического наполнения зоны 2''' сбора моющей среды чистой водой. В этом случае первое цифровое изображение 11A предпочтительно характеризует первое состояние зоны 2''' сбора моющей среды, в котором зона 2''' сбора моющей среды содержит чистую воду. Кроме того, второй цифровое изображение характеризует второе состояние зоны 2''' сбора моющей среды по истечении заданного интервала времени, следующего за этапом наполнения зоны 2''' сбора моющей среды. По другой форме предыдущего варианта выполнения способ также включает этап автоматического выпуска моющего средства в зону 2''' сбора моющей среды. В этом случае второе цифровое изображение 13А характеризует второе состояние зоны 2''' сбора моющей среды по истечении заданного интервала времени, следующего за выполнением этапа автоматического выпуска моющего средства в зону 2''' сбора моющей среды.
По предпочтительному варианту выполнения изобретения первое обработанное изображение 11В идентифицирует линию L1 первого уровня первого объема среды, содержащегося в зоне 2''' сбора моющей среды. Сходным образом второе обработанное изображение 13В идентифицирует линию L2 второго уровня второго объема среды, содержащегося в зоне 2''' сбора моющей среды. С конкретной ссылкой на фиг. 3 и 5 следует отметить, что линии L1, L2 уровней являются линиями, которые ограничивают поверхность среды, содержащейся в зоне 2''' сбора моющей среды, если следить за объемом среды в поперечном направлении с помощью оптического устройства 8, расположенного в боковой стенке LT зоны 2''' сбора моющей среды. Линии L1, L2 уровней необязательно должны быть строго горизонтальными согласно предполагаемому состоянию в случае чистой или не содержащей пены воды, и могут иметь беспорядочное изменение с подъемами и спадами в случае присутствия пены на поверхности жидкости. Предпочтительно, этап 15 сравнения первого объема среды со вторым объемом среды включает подэтап сравнения линии L1 первого уровня с линией L2 уровня для подсчета величины DV изменения объема среды между первым состоянием и вторым состоянием зоны 2''' сбора моющей среды.
Согласно другому варианту или варианту, который может быть скомбинирован с предыдущим вариантом, первое обработанное изображение 11В идентифицирует первую поверхность S1, характеризующую пространство, занимаемое первым объемом среды в заданном секторе Q зоны 2''' сбора моющей среды. Сектор Q образован подобно решетке и, как упомянуто выше, его границы заданы и определены возможностями сканирования оптических устройств 8, которые создают поперечные изображения среды, содержащейся в зоне 2''' сбора моющей среды. Второе обработанное изображение 13В идентифицирует вторую поверхность S2, характеризующую пространство, занимаемое вторым объемом среды в заданном секторе Q зоны 2''' сбора моющей среды. Этап 15 сравнения первого объема среды со вторым объемом среды включает подэтап сравнения первой поверхности S1 со второй поверхностью S2 для подсчета значения DV изменения объема среды между первым состоянием и вторым состоянием зоны 2''' сбора моющей среды. Преимущественно, существует возможность разделения полученного изображения с помощью решетки и сохранения первого цифрового изображения 11A, так чтобы разделять пространство сектора Q на заданное число единиц измерения для сравнения каждого сегмента с целью определения изменений объема среды в пространстве анализируемой области.
Необходимо отметить, что в обоих вышеописанных вариантных/комбинируемых решениях, т.е. в анализе линий L1, L2 уровней или поверхностей SI, S2 в секторе Q (см. фиг. 2 и 5) эти параметры могут быть отнесены к объему удерживающего поддона для среды в зоне 2''' сбора моющей среды для обеспечения возможности подсчета объема среды, содержащейся в зоне сбора моющей среды, в зависимости от конкретного случая.
По предпочтительному варианту выполнения способ предусматривает итерационное повторение во время цикла мойки:
- этапа 13 получения второго цифрового изображения 13А, характеризующего второе состояние зоны 2''' сбора моющей среды по истечении заданного интервала времени от момента выполнения этапа 11 получения первого цифрового изображения 11А, предпочтительно с интервалами времени больше или равными 1 мин.;
- этапа 14 цифровой обработки второго цифрового изображения 13А для получения второго обработанного изображения 13В;
- этапа 15 сравнения первого объема среды со вторым объемом среды для подсчета величины DV изменения объема среды между первым состоянием и вторым состоянием зоны 2''' сбора моющей среды;
- этапа 16 генерирования сигнала Sig о присутствии пены в зоне 2''' сбора моющей среды, когда величина DV изменения объема среды превышает заданное пороговое значение;
- этапа 17 модификации параметров мойки программы Р мойки посудомоечной машины 1, когда генерируется сигнал Sig о присутствии пены.
По предпочтительному варианту способ включает этап получения исходного цифрового изображения RIF, характеризующего исходное состояние зоны 2''' сбора моющей среды. В частности, исходное цифровое изображение RIF идентифицирует исходный объем среды, содержащийся в зоне 2''' сбора моющей среды. Этап 15 сравнения включает подэтап сравнения исходного цифрового изображения RIF с первым обработанным изображением 11В, т.е. величины исходного объема среды с величиной первого объема среды для подсчета величины DV изменения объема среды между исходным состоянием и первым состоянием зоны 2''' сбора моющей среды. Предпочтительно, исходное цифровое изображение RIF относится к состоянию исходной зоны 2''' сбора моющей среды, которая может быть пустой или наполненной чистой водой. Следует отметить, что исходное изображение известно изготовителю посудомоечной машины и хранится в базе данных.
По предпочтительному варианту выполнения способ включает один или несколько этапов для модификации параметров мойки программы Р мойки посудомоечной машины 1, когда генерируется сигнал присутствия пены:
- уменьшение давления насоса для мойки;
- нагрев моющей среды для повышения температуры среды, содержащейся в зоне 2''' сбора моющей среды;
- выпуск моющей среды и автоматическое наполнение зоны 2''' сбора моющей среды чистой водой.
По предпочтительному варианту выполнения способ включает этап сообщения через интерфейс 9 пользователя о присутствии пены, когда генерируется сигнал о присутствии пены, и/или модификациях, выполняемых в отношении одного или нескольких параметров очистки программы Р очистки.
Преимущественно, способ настоящего изобретения позволяет обнаруживать присутствие пены в посудомоечной машине 1.
Также преимущественно, способ позволяет модифицировать один или несколько параметров очистки программы Р очистки в зависимости от возможного присутствия пены.
В частности, к параметрам очистки программы очистки, которые могут быть модифицированы на основе количества обнаруженной пены и длительности цикла, во время которого была обнаружена пена, относятся один или комбинация нескольких из следующих параметров:
- продолжительность этапа мойки;
- давление насоса для мойки;
- температура на этапах мойки и сушки;
- объем загружаемой воды в литрах.
Согласно предпочтительному этапу способ включает этап сообщения через интерфейс пользователя о присутствии пены и/или модификациях, выполняемых в отношении одного или нескольких параметров очистки программы Р очистки, для скорейшего информирования пользователя о выполняемых изменениях.
Как было показано, с помощью способа и посудомоечной машины 1 можно выдавать сигнал через интерфейс 9 пользователя об идентификации изменения рабочего состояния самой машины для обеспечения возможности восстановления установочного состояния машины. Это уменьшает необходимость выполнения заданной мойки некоторой посуды и/или повторения цикла мойки при последующей подаче воды, моющего вещества, а также снижает расходы энергии.
Согласно варианту выполнения способ может быть внедрен следующим образом:
- одну или несколько телекамер устанавливают таким образом, чтобы обеспечить возможность наблюдения зоны между нижней крыльчаткой 5А, используемой для распределения моющей среды, и нижней частью 2А поддона посудомоечной машины (зона 2''' сбора моющей среды), где собирается вода, подаваемая для мойки;
- телекамера (телекамеры), соединенная с устройством управления посудомоечной машины и/или с удаленным устройством, создает изображение до приведения в действие насоса для мойки (исходное изображение, поддон, наполненный чистой водой);
- после приведения в действие насоса для мойки система приступает к созданию изображений с интервалами больше или равными 1 минуте;
- посредством анализа изображений и пространства, занимаемого моющей средой, используя систему обработки изображений (например, панель управления и/или дистанционно подсоединенное устройство), можно определить присутствие пены, анализируя сравнение пространств с исходным изображением.
Необходимо отметить, что в условиях отсутствия пены второе обработанное изображение 13В не имеет отличий по сравнению с первым обработанным изображением 11В. Однако в присутствии пены пространство будет занято пеной и, следовательно, будет идентифицировано состояние «присутствия пены».
По другому предпочтительному варианту выполнения изобретения существует возможность генерирования сигнала о возврате в исходное состояние в отношении пены в случае, если после модификации программы и параметров мойки вся или практически вся ранее обнаруженная пена была удалена, обеспечивая получение отрицательного значения изменения количества среды. Кроме того, существует возможность генерирования сигнала об отсутствии пены, когда значение изменения количества среды равно нулю.
Очевидно, что специалист в данной области техники с целью удовлетворения дополнительных конкретных требований может выполнять многочисленные модификации вышеописанных вариантов, соответствующие объему защиты, установленному в приведенной ниже формуле изобретения.
Настоящее изобретение относится к способу автоматической оценки присутствия пены в посудомоечной машине (1), оснащенной оптическими устройствами (8), причем указанный способ включает: этап (11) получения первого цифрового изображения (11А), характеризующего первое состояние зоны (2''') сбора моющей среды посудомоечной машины (1); этап (12) цифровой обработки первого цифрового изображения (11А) для получения первого обработанного изображения (11В), которое идентифицирует величину первого объема среды, содержащегося в зоне (2''') сбора моющей среды; этап (13) получения второго цифрового изображения (13А), характеризующего второе состояние зоны (2''') сбора моющей среды по истечении заданного интервала времени от момента выполнения этапа (11) получения первого цифрового изображения (11А); этап (14) цифровой обработки второго цифрового изображения (13А) для получения второго обработанного изображения (13В), которое идентифицирует величину второго объема среды, содержащегося в зоне (2''') сбора моющей среды; этап (15) сравнения величины первого объема среды с величиной второго объема среды для подсчета величины (DV) изменения объема среды; этап генерирования сигнала (Sig) о присутствии пены, характеризующего присутствие пены в зоне (2''') сбора моющей среды, когда величина (DV) изменения объема среды превышает заданное пороговое значение; этап модификации параметров мойки программы (Р) мойки посудомоечной машины (1), когда генерируется сигнал о присутствии пены. 3 н. и 11 з.п. ф-лы, 6 ил.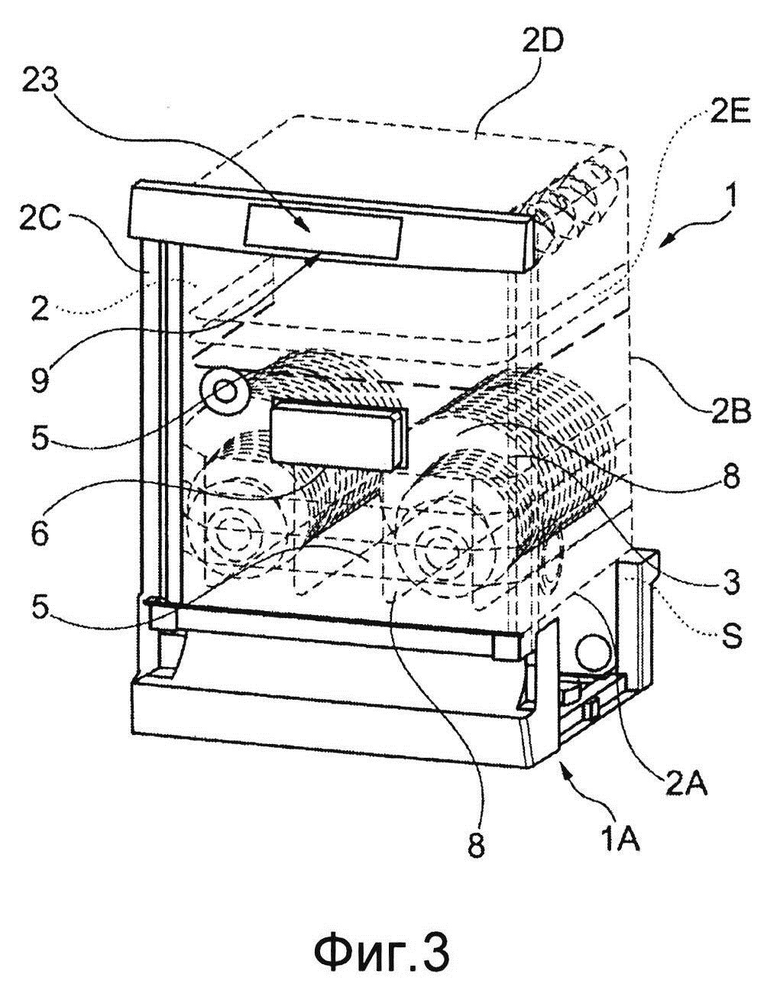
1. Способ автоматической оценки присутствия пены в посудомоечной машине (1), содержащей зону (2) мойки, имеющую зону (2''') сбора моющей среды, причем указанный способ отличается тем, что включает
этап (11) получения первого цифрового изображения (11А), характеризующего первое состояние указанной зоны (2''') сбора моющей среды,
этап (12) цифровой обработки указанного первого цифрового изображения (11А) для получения первого обработанного изображения (11В), на котором указанное первое обработанное изображение (11В) идентифицирует величину первого объема среды, содержащегося в указанной зоне (2''') сбора моющей среды,
этап (13) получения второго цифрового изображения (13А), характеризующего второе состояние указанной зоны (2''') сбора моющей среды по истечении заданного интервала времени от момента выполнения указанного этапа (11) получения первого цифрового изображения (11А),
этап (14) цифровой обработки указанного второго цифрового изображения (13А) для получения второго обработанного изображения (13В), на котором указанное второе обработанное изображение (13В) идентифицирует величину второго объема среды, содержащегося в указанной зоне (2''') сбора моющей среды,
этап (15) сравнения указанной величины указанного первого объема среды с величиной указанного второго объема среды для подсчета величины (DV) изменения объема среды между указанным первым состоянием и указанным вторым состоянием указанной зоны (2''') сбора моющей среды,
этап (16) генерирования сигнала (Sig) о присутствии пены, характеризующего присутствие пены в указанной зоне (2''') сбора моющей среды, когда величина (DV) указанного изменения объема среды превышает заданное пороговое значение,
этап (17) модификации параметров мойки программы (Р) мойки указанной посудомоечной машины (1), когда генерируется указанный сигнал (Sig) о присутствии пены.
2. Способ по п. 1, в котором:
указанная посудомоечная машина (1) содержит насос для мойки,
указанное первое цифровое изображение (11А) характеризует первое состояние указанной зоны (2''') сбора моющей среды перед приведением в действие указанного насоса для мойки,
указанный способ содержит этап автоматического приведения в действие насоса для мойки,
указанное второе цифровое изображение (13А) характеризует второе состояние указанной зоны (2''') сбора моющей среды по истечении заданного интервала времени, следующего за указанным этапом приведения в действие указанного насоса для мойки.
3. Способ по п. 1, включающий:
этап (10В) автоматического наполнения указанной зоны (2''') сбора моющей среды чистой водой,
причем
указанное первое цифровое изображение (11А) характеризует первое состояние указанной зоны (2''') сбора моющей среды, в котором указанная зона (2''') сбора моющей среды содержит чистую воду,
указанное второе цифровое изображение (13А) характеризует второе состояние указанной зоны (2''') сбора моющей среды по истечении заданного интервала времени, следующего за указанным этапом наполнения указанной зоны (2''') сбора моющей среды.
4. Способ по п. 1, включающий:
этап (10В) автоматического наполнения указанной зоны (2''') сбора моющей среды чистой водой, причем указанное первое цифровое изображение (11А) характеризует первое состояние указанной зоны (2''') сбора моющей среды, в котором указанная зона (2''') сбора моющей среды содержит чистую воду,
указанный способ включает этап автоматического выпуска моющего средства в указанную зону (2''') сбора моющей среды, причем указанное второе цифровое изображение (13А) характеризует второе состояние указанной зоны (2''') сбора моющей среды по истечении заданного интервала времени, следующего за выполнением указанного этапа автоматического выпуска моющего средства в указанную зону (2''') сбора моющей среды.
5. Способ по любому из пп. 1-4, в котором:
указанная зона (2''') сбора моющей среды расположена между нижней крыльчаткой (5А) и стенкой (2А) основания указанной зоны (2) мойки,
указанное первое обработанное изображение (11В) идентифицирует линию (L1) первого уровня указанного первого объема среды, содержащегося в указанной зоне (2''') сбора моющей среды,
указанное второе обработанное изображение (13В) идентифицирует линию (L2) второго уровня указанного второго объема среды, содержащегося в указанной зоне (2''') сбора моющей среды,
указанный этап (15) сравнения указанного первого объема среды с указанным вторым объемом среды включает подэтап сравнения указанной линии (L1) первого уровня с указанной линией (L2) второго уровня для подсчета указанной величины (DV) изменения объема среды между указанным первым состоянием и указанным вторым состоянием указанной зоны (2''') сбора моющей среды.
6. Способ по любому из пп. 1-4, в котором:
указанная зона (2''') сбора моющей среды расположена между нижней крыльчаткой (5А) и стенкой (2А) основания указанной зоны (2) мойки,
указанное первое обработанное изображение (11В) идентифицирует первую поверхность (S1), характеризующую пространство, занимаемое указанным первым объемом среды в заданном секторе (Q) указанной зоны (2''') сбора моющей среды, причем указанный сектор (Q) выполнен подобно решетке,
указанное второе обработанное изображение (13В) идентифицирует вторую поверхность (S2), характеризующую пространство, занимаемое указанным вторым объемом среды в заданном секторе (Q) указанной зоны (2''') сбора моющей среды,
указанный этап (15) сравнения указанного первого объема среды с указанным вторым объемом среды включает подэтап сравнения указанной первой поверхности (S1) с указанной второй поверхностью (S2) для подсчета указанной величины (DV) изменения объема среды между указанным первым состоянием и указанным вторым состоянием указанной зоны (2''') сбора моющей среды.
7. Способ по любому из пп. 1-6, в котором указанный способ предусматривает итерационное повторение во время цикла мойки:
этапа (13) получения второго цифрового изображения (13А), характеризующего указанное второе состояние указанной зоны (2''') сбора моющей среды по истечении заданного интервала времени от момента выполнения указанного этапа (11) получения первого цифрового изображения (11А),
этапа (14) цифровой обработки указанного второго цифрового изображения (13А) для получения второго обработанного изображения (13В),
этапа (15) сравнения указанного первого объема среды с указанным вторым объемом среды для подсчета величины (DV) изменения объема среды между указанным первым состоянием и указанным вторым состоянием указанной зоны (2''') сбора моющей среды,
этапа (16) генерирования сигнала (Sig) о присутствии пены в указанной зоне (2''') сбора моющей среды, когда величина (DV) указанного изменения объема среды превышает заданное пороговое значение,
этапа (17) модификации параметров мойки программы (Р) мойки указанной посудомоечной машины (1), когда генерируется указанный сигнал (Sig) о присутствии пены.
8. Способ по любому из пп. 1-7, включающий:
этап получения исходного цифрового изображения (RIF), характеризующего исходное состояние указанной зоны (2''') сбора моющей среды, причем указанное исходное цифровое изображение (RIF) идентифицирует исходный объем среды, содержащийся в указанной зоне (2''') сбора моющей среды,
причем указанный этап (15) сравнения включает подэтап сравнения указанного исходного объема среды с указанным первым объемом среды для подсчета величины (DV) изменения объема среды между указанным исходным состоянием и указанным первым состоянием указанной зоны (2''') сбора моющей среды.
9. Способ по любому из пп. 1-8, включающий один или несколько из следующих этапов для модификации параметров мойки программы (Р) мойки указанной посудомоечной машины (1), когда генерируется вышеуказанный сигнал о присутствии пены:
уменьшение давления указанного насоса для мойки;
нагрев моющей среды для повышения температуры среды, содержащейся в указанной зоне (2''') сбора моющей среды;
выпуск моющей среды и автоматическое наполнение указанной зоны (2''') сбора моющей среды чистой водой.
10. Способ по п. 9, в котором указанная посудомоечная машина (1) содержит интерфейс (9) пользователя, причем способ включает этап сообщения через указанный интерфейс (9) пользователя о присутствии пены, когда генерируется указанный сигнал о присутствии пены, и/или модификациях, выполняемых в отношении одного или нескольких указанных параметров мойки указанной программы (Р) мойки.
11. Посудомоечная машина (1), содержащая насос, который может быть соединен с впуском водопроводной сети для подачи чистой воды из водопроводной сети, одну или несколько (5А, 5В) крыльчаток, сообщающихся по текучей среде с таким насосом, зону мойки (2), имеющую зону (2''') сбора моющей среды, расположенную между нижней крыльчаткой (5А) и стенкой (2А) основания указанной зоны (2) мойки, и дверцу (3), которая может быть связана в закрытом состоянии с указанной зоной (2) мойки, блок (4) управления, имеющий блок памяти, в одной области которого хранится программа (Р) мойки, дозатор (6), выполненный с возможностью выпуска моющего вещества в указанную зону (2''') сбора моющей среды, и одно или несколько резистивных средств для варьирования температуры водопроводной воды, одно или несколько оптических устройств (8), способных получать цифровые изображения (11, 16) указанной зоны (2''') сбора моющей среды, и интерфейс (9) пользователя, причем указанные одно или несколько оптических устройств (8) и указанный интерфейс (9) пользователя связаны посредством направления сигналов с указанным блоком (4) управления, отличающаяся тем, что она содержит программу, находящуюся в другой области указанного блока памяти и сконфигурированную для осуществления способа по любому из предыдущих пп. 1-10.
12. Посудомоечная машина по п. 11, в которой указанный интерфейс (9) пользователя является экраном, встроенным в указанную посудомоечную машину, причем указанный экран (23) выполнен с возможностью отображения указанного сигнала о присутствии пены и/или модификациях, которые должны быть выполнены в отношении одного или нескольких указанных параметров мойки указанной программы (Р) мойки, с помощью светоиспускающей индикации, текстовых сообщений и/или изображений.
13. Посудомоечная машина по п. 11, содержащая приемопередающее устройство, при этом указанный интерфейс (9) пользователя является портативным устройством, имеющим собственное приемопередающее устройство, выполненное с возможностью образования связи посредством направления сигналов с указанным приемопередающим устройством указанной посудомоечной машины (1) для приема данных, характеризующих указанный сигнал о присутствии пены и/или модификациях, которые должны быть выполнены в отношении одного или нескольких указанных параметров мойки указанной программы мойки, с помощью светоиспускающей индикации, текстовых сообщений и/или изображений.
14. Система автоматической оценки присутствия пены в посудомоечной машине (1), содержащая:
посудомоечную машину, содержащую насос, который может быть соединен с впуском водопроводной сети для подачи чистой воды из водопроводной сети, одну или несколько (5А, 5В) крыльчаток, сообщающихся по текучей среде с таким насосом, зону мойки (2), имеющую зону (2''') сбора моющей среды, расположенную между нижней крыльчаткой (5А) и стенкой (2А) основания указанной зоны (2) мойки, и дверцу (3), которая может быть связана в закрытом состоянии с указанной зоной (2) мойки, блок (4) управления, имеющий блок памяти, в одной области которого хранится программа (Р) мойки, дозатор (6) для дозирования моющего вещества, и одно или несколько резистивных средств для варьирования температуры водопроводной воды, одно или несколько оптических устройств (8), способных получать цифровые изображения указанной зоны (2''') сбора моющей среды, и интерфейс (9) пользователя, причем указанные одно или несколько оптических устройств (8) и указанный интерфейс (9) пользователя связаны посредством направления сигналов с указанным блоком (4) управления подобно указанному насосу и приемопередаточному устройству;
портативное устройство (22), которое пользователь может удерживать рукой, имеющее собственное приемопередающее устройство, выполненное с возможностью образования связи посредством направления сигналов с указанным приемопередающим устройством указанной посудомоечной машины, экран, выполненный с возможностью отображения светоиспускающей индикации, текстовых сообщений и/или изображений, и блок памяти,
отличающаяся тем, что она содержит программу, находящуюся в области блока памяти указанного портативного (22) устройства, которое может удерживаться пользователем, причем указанная программа сконфигурирована с возможностью осуществления способа по любому из пп. 1-10 и отображения на указанном интерфейсе (9) и/или указанном экране указанного портативного устройства, удерживаемого пользователем, указанного сигнала о присутствии пены и/или модификациях, которые должны быть выполнены в отношении одного или нескольких указанных параметров мойки указанной программы мойки, с помощью светоиспускающей индикации, текстовых сообщений и/или изображений.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 8696827 B2, 15.04.2014 | |||
| DE 102010038668 A1, 02.02.2012 | |||
| СПОСОБ ЗАПОЛНЕНИЯ ВОДОЙ МОЕЧНОГО БАКА ПОСУДОМОЕЧНОЙ МАШИНЫ | 2011 |
|
RU2537820C2 |

