Настоящее изобретение относится к быстродействующему соединителю для машин для земляных работ. Конкретнее, но не исключительно оно относится к быстродействующему соединителю, имеющему спусковой элемент для возврата в исходное положение удерживающего элемента для съемного оборудования.
Быстродействующие соединители используются, чтобы быстро зацепить или отцепить съемное оборудование, такое как, например, ковш к экскаватору. Быстродействующий соединитель может быть прикреплен к концевой части стрелы экскаватора. Благодаря быстродействующему соединителю оператор машины может зацеплять и отцепить съемное оборудование без необходимости перемещения из кабины или рабочего положения экскаватора. Съемное оборудование, лежащее на земле, может быть присоединено оператором посредством манипулирования стрелой экскаватора для соединения со съемным оборудованием. Никакая другая помощь при манипулировании съемным оборудованием для достижения соединения не требуется, поэтому соединение достигается быстро.
Один тип быстродействующего соединителя для соединения с экскаватором съемного оборудования, такого как, например, ковш, описан в NZ546893. Как видно из NZ546893, а также на фиг. 1А-В и 2, съемное оборудование, как правило, имеет два параллельных пальца Р1 и Р2, выполненные на расстоянии друг от друга, и каждый из которых может фиксироваться с возможностью высвобождения в соответствующих гнездах быстродействующего соединителя. Передний палец Р1 может удерживаться ближе к экскаватору, а задний палец Р2 удерживается на большем расстоянии от экскаватора. Быстродействующие соединители должны быть выполнены с возможностью надежно удерживать свое съемное оборудование. Съемное оборудование может быть тяжелым и переносить большие нагрузки. Ошибка при установке надежного соединения может привести к несчастному случаю со смертельным исходом или повреждению. Тем не менее, для повышения производительности также желательно быстрое соединение и отсоединение съемного оборудования с помощью быстродействующего соединителя. Следовательно, между надежным соединением и быстрым соединением существует противоречие. Как видно из фиг. 1, палец Р1 может быть помещен в гнезде R1, а палец Р2 - в гнезде R2. В гнезде R1 предусмотрен предохранительный фиксатор 6, или первый фиксатор 6, который выполнен с возможностью удержания пальца Р1 в гнезде R1. В гнезде R2 предусмотрен клин 3, или второй фиксатор 3, который может перемещаться для удерживания пальца Р2 в гнезде R2.
Обычно экскаваторы оснащены гидравлической подающей и обратной линией и четырехходовым двухпозиционным гидравлическим клапаном для обеспечения работы гидравлических компонентов на конце стрелы. Указанные устройства могут быть использованы гидравлическим цилиндром быстродействующего соединителя для приведения в действие как фиксатора 6, так и клина 3 для зацепления и/или отцепления одного или двух пальцев. В NZ546893 используются два гидроцилиндра. Один - для фиксатора, и один - для клина.
Пример того, как съемное оборудование может быть отсоединено от быстродействующего соединителя того типа, который описан в NZ546893, показан на фиг. 2-6. На фиг. 2 показан экскаватор 5 со своим съемным оборудованием, прикрепленным к концевой части стрелы 7. Съемное оборудование может быть расположено на поверхности, такой как земля, чтобы снять нагрузку с соединителя. На фиг. 3 показан соединитель с закрепленными пальцами. На фиг. 4 показано втягивание как первого фиксатора 6, так и второго фиксатора (или клина) 3. Это может быть осуществлено в результате инициации оператором повышения гидравлического давления в соответствующем гидравлическом контуре для приведения в действие гидравлических цилиндров для фиксатора 6 и для клина 3. Два гидравлических цилиндра перемещают фиксатор 6 и, соответственно, клин 3 в состояние высвобождения. На фиг. 3 показано, как оператор может отодвинуть соединитель от съемного оборудования так, чтобы пальцы Р1 и Р2 могли выйти из соответствующего гнезда R1 и R2. По истечении установленного периода времени с момента, когда клин 3 и фиксатор 6 находятся в состоянии высвобождения, система измерения времени может инициировать приведение в действие фиксатора 6, чтобы он переместился в свое положение фиксации, как показано на фиг. 6.
На фиг. 7-10 показано, как съемное оборудование может быть прикреплено к быстродействующему соединителю того типа, который описан в NZ546893. На фиг. 7 и 8 показано, что клин 3 втянут. На фиг. 7 и 8 показан ввод пальца Р1 в гнездо R1 и перемещение фиксатора 6 для обеспечения возможности ввода. Фиксатор 6 может поворачиваться против смещения пружины, чтобы палец Р1 мог быть вмещен в соответствующее гнездо R1. Фиксатор 6 подпружинен для перемещения его назад, в его состояние фиксации, когда палец Р1 перемещается достаточно далеко в гнездо R1. Фиксатор 6 защелкивается в состоянии фиксации под действием пружины, когда палец Р1 перемещается достаточно далеко в гнездо R1. Фиксация с защелкиванием означает, что вмешательство оператора не требуется для того, чтобы обеспечить переход фиксатора 6 в свое положение фиксации во время крепления. Палец Р1 должен лишь переместиться достаточно глубоко в гнездо R1. На фиг. 9 показано, что оператор инициировал повышение гидравлического давления, чтобы выдвинуть клин 3, чтобы фиксировать палец Р2 в гнезде R2. После этого выполняется быстрое испытание на стук, чтобы убедиться в том, что съемное оборудование прикреплено к соединителю.
Для целей безопасности, в быстродействующем соединителе, показанном на фиг. 2-10, работа фиксатора 6 может быть основана на системе измерения времени. По истечении установленного периода времени с момента высвобождения фиксатора 6, для высвобождения пальца Р1, как показано на фиг.6, фиксатор 6 возвращается обратно в свое положение фиксации. Это означает, что фиксатор возвращается в положение фиксации, в котором он может удерживать палец Р1. Это может быть достигнуто посредством электрических и гидравлических средств для возврата фиксатора 6 в положение фиксации. Между приведением в действие фиксатора для перемещения в его положение высвобождения, и моментом, когда он может вернуться обратно в свое положение фиксации, проходит заранее установленное время. Это дает оператору достаточно времени для извлечения пальца Р1 из гнезда R1. При поднятом фиксаторе 6 может звучать сигнал тревоги, так что оператор знает, что палец Р1 можно извлечь из гнезда R1. Задержка по времени может составлять 10 секунд. Это может быть слишком длительным и требовать много времени.
Быстродействующие соединители, использующие измерители времени, могут быть повреждены пользователями, не знакомыми с такой системой. Оператор может управлять гидравлическим цилиндром для высвобождения клина 4, удерживающего второй палец Р2, и по существу одновременного высвобождения фиксатора 6, удерживающего первый палец Р1, в течение установленного периода времени. Если оператор не удаляет съемное оборудование с быстродействующего соединителя в течение установленного периода времени, фиксатор 6 возвращается в положение фиксации. Так как оператор может не понимать, что фиксатор 6 вернулся в положение фиксации, а палец Р1 все еще соединен, он может попытаться снять съемное оборудование и, тем самым, повредить фиксатор.
Быстродействующий соединитель, показанный на фиг. 2-10, может использовать гидравлический цилиндр для приведения в движение клина 3 и отдельный гидравлический цилиндр для втягивания фиксатора. Это означает, что обычного четырехходового двухпозиционного клапана не достаточно для управления обоими гидравлическими цилиндрами и сохранения функции тайм-аута. Чтобы обеспечить работу обоих гидравлических цилиндров, на экскаваторе с целью переоборудования должен быть установлен гидравлический клапан, не принадлежащий изготовителю комплексного оборудования, или должна эксплуатироваться дополнительная пара гидравлических линий. Это увеличивает расходы.
Известные быстродействующие соединители также могут требовать, чтобы съемное оборудование было полностью прижато в направлении экскаватора, чтобы сделать возможным снятие съемного оборудования. Это может быть проблематично для некоторого съемного оборудования, центр тяжести которого находится достаточно далеко от области крепления быстродействующего соединителя, например, для гидравлических молотов. Гидравлические молоты также могут храниться в вертикальном положении в раме для транспортировки. Проблемы могут возникнуть, когда гидравлический молот прижат в направлении экскаватора для отсоединения, после чего он должен быть загружен в раму в вертикальном положении. Манипулирование отцепленным или частично отцепленным съемным оборудованием может быть небезопасным.
Таким образом, предпочтительная задача настоящего изобретения заключается в обеспечении соединителя и/или машины для земляных работ, включающей в себя соединитель, устраняющий по меньшей мере один из множества вышеперечисленных недостатков, и/или обеспечении приемлемого выбора для общественности.
Если в настоящем описании делается ссылка на внешние источники информации, в том числе описания патентов и другие документы, это делается, как правило, для того, чтобы обеспечить контекст раскрытия признаков настоящего изобретения. Если не указано иное, ссылка на такие источники информации ни в одной из юрисдикций не следует толковать как признание того, что такие источники информации являются уровнем техники или составляют часть общих знаний данной области техники.
В контексте настоящего описания, если этапы способа описываются последовательно, то соответствующая последовательность не обязательно означает, что этапы должны быть хронологически упорядочены в указанной последовательности, если только не существует другого логического способа интерпретации упомянутой последовательности.
В соответствии с первым аспектом, настоящее изобретение относится к соединителю для крепления съемного оборудования к машине для земляных работ, содержащему корпус соединителя, представляющий собой гнездо, содержащее входное отверстие, выполненное с возможностью прохождения через него пальца съемного оборудования для перемещения его через проход гнезда к области захвата гнезда, при этом проход гнезда выполнен с возможностью перекрытия в степени, достаточной для предотвращения перемещения пальца из области захвата, посредством фиксатора, выполненного с возможностью перемещения из корпуса соединителя и относительно него и смещенного в первое положение перекрытого прохода, в котором фиксатор предотвращает перемещение пальца из области захвата и способен перемещаться во второе положение относительно прохода, для обеспечения возможности:
(i) входа указанного пальца в область захвата посредством прижатия указанного пальца к фиксатору для перемещения фиксатора против его смещения по направлению к указанному второму положению; и
(ii) выхода указанного пальца из области захвата посредством ведущего элемента, выполненного с возможностью перемещения относительно корпуса соединителя для (а) соединения с фиксатором для обеспечения возможности перемещения фиксатора ведущим элементом в его второе положение и (b) отсоединения от фиксатора с предотвращением тем самым управления ведущим элементом положением фиксатора между его первым и вторым положениями,
причем соединитель дополнительно содержит спусковой элемент, выполненный с возможностью перемещения относительно корпуса соединителя так, что его может зацеплять и перемещать указанный палец при перемещении пальца через проход, причем спусковой элемент при его перемещении указанным пальцем обеспечивает отсоединение ведущего элемента от фиксатора.
Предпочтительно спусковой элемент выполнен с возможностью обеспечения отсоединения соединенных фиксатора и ведущего элемента, так что фиксатор, если он не находится в своем первом положении, под действием смещения способен перемещаться в свое первое положение.
Предпочтительно спусковой элемент выполнен с возможностью вызывать перемещение соединенных фиксатора и ведущего элемента относительно друг друга, чтобы расцепить их, для того чтобы фиксатор не удерживался ведущим элементом от перемещения в свое первое положение.
Предпочтительно ведущий элемент установлен относительно корпуса с возможностью вращательного движения, чтобы перемещаться между своим соединенным и отсоединенным положением.
Предпочтительно спусковой элемент установлен с возможностью вращательного движения относительно корпуса.
Предпочтительно ведущий элемент установлен с возможностью вращательного движения относительно корпуса, чтобы перемещаться между соединенным положением и отсоединенным положением, и спусковой элемент установлен с возможностью вращательного движения относительно корпуса, причем ведущий элемент и спусковой элемент каждый выполнены с возможностью вращения относительно общей оси вращения.
Предпочтительно корпус соединителя выполнен с возможностью прикрепления, или прикреплен к машине для земляных работ.
Предпочтительно ведущий элемент расположен у корпуса и может быть приведен в действие, чтобы перемещаться относительно корпуса и перемещать фиксатор в его второе положение, когда он соединен с указанным фиксатором.
Предпочтительно фиксатор установлен относительно корпуса и выполнен с возможностью перемещения относительно корпуса посредством вращательного движения.
Предпочтительно фиксатор может вращаться вокруг оси вращения, закрепленной относительно корпуса соединителя.
Предпочтительно фиксатор установлен на корпусе соединителя посредством оси фиксатора.
Предпочтительно фиксатор выполнен с возможностью перемещения между его первым положением, в котором он установлен относительно корпуса соединителя и гнезда в степени, достаточной для перекрытия прохода пальца из области захвата, и своим вторым положением, в котором проход пальца из области захвата фиксатором не перекрыт.
Предпочтительно ведущий элемент выполнен с возможностью перемещения между первым положением и вторым положением относительно корпуса. Указанное первое положение ведущего элемента, когда он соединен с указанным фиксатором, соответствует первому положению фиксатора, а второе положение ведущего элемента, когда он соединен с указанным фиксатором, соответствует второму положению фиксатора.
Предпочтительно движение ведущего элемента между его первым положением и вторым положением является прямолинейным, за исключением любого вращательного движения, вызванного соединением ведущего элемента с фиксатором, когда фиксатор вращается между его первым положением и вторым положением.
Предпочтительно фиксатор выполнен с возможностью перемещения между его первым положением, в котором он выступает из корпуса соединителя по меньшей мере частично поперек гнезда в степени, достаточной для перекрытия прохода пальца из области захвата, и своем вторым положением, в котором проход пальца из захвата фиксатором не перекрывается.
Предпочтительно фиксатор выполнен с возможностью перемещения между его первым положением, в котором он проходит от корпуса соединителя поперек гнезда, и своем вторым положением, в котором фиксатор не проходит поперек гнезда.
Предпочтительно фиксатор в своем первом положении проходит поперек гнезда в большей степени, чем в своем втором положении.
Предпочтительно перемещение фиксатора из второго положения, когда он находится в первом положении, предотвращено.
Предпочтительно корпус соединителя содержит ограничитель для остановки перемещения фиксатора дальше его первого положения.
Предпочтительно ограничитель содержит ограничительную поверхность, к которой смещен фиксатор, когда он находится в своем первом положении.
Предпочтительно фиксатор смещен посредством пружины.
Предпочтительно пружина представляет собой торсионную пружину.
Предпочтительно пружина действует на фиксатор напрямую или опосредованно, например, действуя на вал, посредством которого фиксатор установлен на корпусе.
Предпочтительно в первом положении фиксатора он находится ближе к входному отверстию гнезда, чем во втором положении, в котором фиксатор находится ближе к области захвата.
Предпочтительно ось фиксатора по существу параллельна продольному направлению пальца, когда палец удерживается в указанном гнезде.
Предпочтительно фиксатор в указанном первом положении предотвращает выход указанного пальца из указанной области захвата, когда указанный палец удерживается в гнезде, и делает возможным вход указанного пальца в область захвата мимо фиксатора, когда указанный палец проходит через входное отверстие и проход в гнездо.
Предпочтительно ведущий элемент и фиксатор (или вал, посредством которого фиксатор установлен на корпусе) имеют взаимодействующие друг с другом поверхности соединения или элементы, действующие в качестве соединения, в рабочем положении зацепляемые друг с другом, когда указанный ведущий элемент находится в своем соединенном положении, и в рабочем положении отцепляемые, когда ведущий элемент находится в своем отсоединенном состоянии.
Предпочтительно фиксатор и ведущий элемент имеют взаимодействующие друг с другом поверхности соединения или элементы, действующие в качестве соединения, соединяемые, когда указанный ведущий элемент находится в своем соединенном положении, и разъединяемые, когда ведущий элемент находится в своем отсоединенном положении.
Предпочтительно соединение расположено в радиальном направлении на расстоянии от оси фиксатора.
Предпочтительно фиксатор и ведущий элемент при соединении захватываются или перемещаются шагами, или сцепляются крюком, или сцепляются между собой посредством зубчатого зацепления, а при отсоединении разъединяются или отцепляются.
Предпочтительно фиксатор и ведущий элемент при соединении сцепляются крюком в месте, расположенном радиально наружу от оси вращения фиксатора.
Предпочтительно поверхность соединения или элемент фиксатора может находиться в скользящем контакте с ведущим элементом, когда ведущий элемент находится в отсоединенном состоянии, и удерживать ведущий элемент в его отсоединенном состоянии до тех пор, пока ведущий элемент не переместится в первое положение, а фиксатор не окажется в своем первом положении.
Предпочтительно соединение содержит выступ фиксатора и поверхность соединения ведущего элемента, выполненную с возможностью соединения с выступом фиксатора, чтобы сцепить фиксатор и ведущий элемент.
Предпочтительно выступ фиксатора расположен в радиальном направлении на расстоянии от оси фиксатора, чтобы в соединенном состоянии ведущий элемент мог прикладывать вращающий момент к фиксатору в направлении его второго положения и перемещать фиксатор в указанном направлении.
Предпочтительно ведущий элемент напрямую или опосредованно установлен на корпусе с возможностью прямолинейного перемещения относительно корпуса.
Предпочтительно ведущий элемент напрямую или опосредованно установлен на указанном корпусе с возможностью вращательного перемещения относительно указанного корпуса.
Предпочтительно ведущий элемент установлен напрямую на указанном корпусе.
Предпочтительно ведущий элемент и спусковой элемент установлены на корпусе вместе.
Предпочтительно ведущий элемент и спусковой элемент установлены на корпусе вместе, чтобы иметь возможность совместного вращательного перемещения относительно корпуса.
Предпочтительно ведущий элемент и спусковой элемент установлены на корпусе вместе, чтобы иметь возможность совместного вращательного перемещения относительно корпуса, причем ведущий элемент выполнен с возможностью по меньшей мере одного из вращательного перемещения и прямолинейного перемещения относительно спускового элемента.
Предпочтительно ведущий элемент и спусковой элемент установлены на корпусе вместе, чтобы иметь возможность совместного вращательного перемещения относительно корпуса, причем ведущий элемент выполнен с возможностью прямолинейного перемещения относительно спускового элемента.
Предпочтительно ведущий элемент соединен с приводом ведущего элемента так, чтобы вызывать перемещение ведущего элемента с возможностью перемещения фиксатора.
Предпочтительно привод ведущего элемента расположен у корпуса.
Предпочтительно привод ведущего элемента и спусковой элемент установлены вместе и на корпусе, привод ведущего элемента выполнен с возможностью вызывать прямолинейное движение ведущего элемента относительно спускового элемента.
Предпочтительно привод ведущего элемента установлен с возможностью вращения вокруг оси вращения спускового элемента и с возможностью перемещения ведущего элемента в радиальном направлении относительно оси вращения спускового элемента.
Предпочтительно привод ведущего элемента представляет собой гидравлический привод ведущего элемента.
Предпочтительно, в котором привод ведущего элемента представляет собой гидравлический привод и выполнен с возможностью при приведении в действие вызывать перемещение ведущего элемента, когда ведущий элемент соединен с фиксатором, в таком направлении, чтобы перемещать фиксатор в его второе положение или по направлению к его второму положению.
Предпочтительно, в котором привод ведущего элемента, когда он не приведен в действие, обеспечивает возможность перемещения ведущего элемента, когда он соединен с фиксатором, в таком направлении, чтобы обеспечить возможность перемещения фиксатора по направлению к его первому положению.
Предпочтительно смещение, действующее на фиксатор, является достаточно сильным, чтобы, когда привод ведущего элемента не приведен в действие, а ведущий элемент соединен с фиксатором, смещение перемещало фиксатор по направлению к его первому положению.
Предпочтительно смещение напрямую или опосредованно действует на указанный ведущий элемент, чтобы вызвать перемещение ведущего элемента в положение, способное принять соединенное состояние.
Предпочтительно указанное смещение обеспечивается пружиной, напрямую или опосредованно действующей на ведущий элемент.
Предпочтительно смещение вызывает вращение ведущего элемента относительно корпуса.
Предпочтительно гнездо обеспечено корпусом соединителя.
Предпочтительно гнездо предусмотрено в корпусе соединителя.
Предпочтительно второе гнездо обеспечено корпусом соединителя в месте, удаленном от первого упомянутого гнезда, причем второе гнездо выполнено с возможностью вмещения и фиксации второго пальца съемного оборудования.
Предпочтительно обеспечено указанное второе гнездо, которое выполнено с возможностью фиксации второго пальца съемного оборудования, когда указанное первое гнездо удерживает указанный первый палец, и/или второе гнездо выполнено с возможностью удержания второго пальца съемного оборудования, когда в указанном первом гнезде не имеется указанного первого пальца, и обеспечен второй фиксатор, расположенный у корпуса соединителя с возможностью перемещения между первым положением, в котором он предотвращает перемещение из второго гнезда второго пальца, расположенного во втором гнезде, и вторым положением, в котором удерживаемый второй палец может быть высвобожден из второго гнезда.
Предпочтительно второй фиксатор выполнен с возможностью приведения в движение посредством гидравлического привода.
Предпочтительно гидравлический привод для второго фиксатора отличается от гидравлического привода для ведущего элемента.
Предпочтительно гидравлический привод для второго фиксатора входит в тот же гидравлический контур, что и гидравлический привод для ведущего элемента.
Предпочтительно приведение в действие гидравлического привода для второго фиксатора приводит в действие гидравлический привод для ведущего элемента.
Предпочтительно отключение гидравлического привода для второго фиксатора отключает гидравлический привод ведущего элемента.
Предпочтительно в отключенном состоянии смещение, действующее на ведущий элемент, вызывает перемещение ведущего элемента в положение, соответствующее положению, в котором он может сцепиться с фиксатором, когда фиксатор находится в своем первом положении.
Предпочтительно приведение в действие ведущего элемента может представлять собой механический привод.
Предпочтительно механический привод представляет собой систему типа винт и резьба.
Предпочтительно спусковой элемент установлен у корпуса соединителя, чтобы он мог совершать вращательное движение относительно корпуса соединителя.
Предпочтительно спусковой элемент установлен на корпусе соединителя, чтобы он мог совершать прямолинейное движение относительно корпуса соединителя.
Предпочтительно спусковой элемент включает в себя пусковую область, расположенную для контакта с пальцем, когда палец входит или выходит из области захвата первого упомянутого гнезда.
Предпочтительно спусковой элемент включает в себя область отсоединения, которая при движении (предпочтительно при вращении) спускового элемента относительно корпуса, вызванном перемещением пальца в область захвата или из области захвата, контактирует с ведущим элементом и/или перемещает ведущий элемент так, чтобы в достаточной степени переместить ведущий элемент (предпочтительно вращать ведущий элемент) относительно фиксатора, чтобы расцепить ведущий элемент и фиксатор.
Предпочтительно, в котором ведущий элемент выполнен с возможностью вращения для соединения с фиксатором и отсоединения от него и приведения в поступательное движение для перемещения фиксатора между его первым положением и вторым положением, когда ведущий элемент соединен с фиксатором.
Предпочтительно область отсоединения представляет собой поверхность спускового элемента, которая может контактировать с поверхностью ведущего элемента.
Предпочтительно спусковой элемент смещен во вращательное положение относительно корпуса, в котором спусковой элемент предназначен для контакта с пальцем, когда палец перемещен в область захвата и/или из области захвата.
Предпочтительно вращательное смещение спускового элемента обеспечено посредством пружины.
Предпочтительно, когда спусковой элемент вызывает отсоединение между ведущим элементом и фиксатором, фиксатор под действием силы смещения может вращаться в свое первое положение без вращения ведущего элемента вместе с фиксатором.
Предпочтительно соединитель выполнен с возможностью зацепления с концевой частью стрелы машины для земляных работ.
Предпочтительно гидравлический насос для гидравлического привода (гидравлических приводов) возит с собой машина для земляных работ.
Предпочтительно корпус соединителя включает в себя крепежные средства, чтобы соединитель мог быть прикреплен к стреле машины для земляных работ.
Предпочтительно корпус соединителя содержит две расположенные на расстоянии друг от друга соединенные пластины, каждая из которых включает в себя проходящий от ее края вырез, чтобы вместе определить гнездо.
Предпочтительно фиксатор расположен между двумя основными пластинами корпуса соединителя.
Предпочтительно спусковой элемент расположен между двумя основными пластинами корпуса соединителя.
Предпочтительно ведущий элемент расположен между двумя основными пластинами корпуса соединителя.
Предпочтительно привод ведущего элемента расположен между двумя основными пластинами корпуса соединителя.
Предпочтительно между двумя основными пластинами корпуса соединителя расположена пара фиксаторов, которые могут перемещаться вместе, и каждый из которых расположен рядом с соответствующей основной пластиной.
Предпочтительно между двумя основными пластинами корпуса соединителя расположена пара спусковых элементов, которые могут перемещаться вместе, и каждый из которых расположен рядом с соответствующей основной пластиной.
Предпочтительно фиксатор перемещается в свое первое положение под действием смещения фиксатора, когда спусковой элемент вызывает отсоединение ведущего элемента и фиксатора.
Предпочтительно спусковой элемент смещен, чтобы он перемещался и проходил, по меньшей мере частично, поперек гнезда.
Предпочтительно второй фиксатор может находиться в положении, в котором второй палец может быть высвобожден из второго гнезда, в то время как первый фиксатор находится в своем первом положении.
Предпочтительно второй фиксатор может находиться в положении, в котором второй палец может быть высвобожден из второго гнезда, в то время как первый фиксатор находится в своем первом положении и отсоединен от ведущего элемента.
Предпочтительно корпус соединителя определяет гнездо.
Предпочтительно корпус соединителя включает в себя две основные пластины, которые параллельны друг другу, и каждая из которых включает в себя краевой профиль для определения указанного гнезда.
Во втором аспекте изобретения настоящее изобретение относится к соединителю для соединения с возможностью высвобождения съемного оборудования, содержащему соединительный палец, с машиной для земляных работ, причем соединитель содержит:
a. корпус соединителя, прикрепленный или выполненный с возможностью прикрепления к машине для земляных работ,
b. гнездо, обеспеченное корпусом соединителя, выполненное с возможностью вмещения указанного пальца,
c. фиксатор, обеспеченный корпусом соединителя с возможностью перемещения относительно корпуса так, чтобы в положении фиксации пальца относительно корпуса соединителя удерживать палец в гнезде, причем фиксатор выполнен с возможностью соединения с ведущим элементом и отсоединения от ведущего элемента, который, будучи соединенным с фиксатором, способен перемещать фиксатор из положения фиксации пальца в положение, в котором палец способен выйти из гнезда,
d. спусковой элемент, с которым обеспечена возможность контакта указанного пальца, когда палец перемещается относительно корпуса для входа в гнездо и выхода из него для обеспечения отсоединения фиксатора и привода.
Предпочтительно спусковой элемент выполнен с возможностью, вызывать отсоединение фиксатора и привода, по меньшей мере, когда фиксатор не находится в положении фиксации пальца, чтобы фиксатор под действием силы смещения мог быть перемещен в свое положение фиксации пальца.
В еще одном аспекте настоящее изобретение относится к машине для земляных работ, которая содержит шасси и стрелу, поддерживаемую шасси, причем на конце стрелы поддерживается соединитель, описанный выше в настоящем документе.
Можно сказать, что в еще одном аспекте настоящее изобретение представляет собой соединитель для соединения с возможностью высвобождения съемного оборудования, которое содержит соединительный палец, с машиной для земляных работ, причем соединитель содержит
a. корпус соединителя,
b. гнездо, обеспеченное корпусом соединителя, для вмещения указанного пальца через входное отверстие гнезда,
c. фиксатор, расположенный у корпуса с возможностью перемещения относительно гнезда между первым положением, чтобы удерживать указанный палец в гнезде, и вторым положением, чтобы сделать возможной высвобождение указанного пальца из гнезда, причем фиксатор выполнен с возможностью перемещения против смещения, толкающего фиксатор по направлению к первому положению, ко второму положению или по направлению ко второму положению посредством каждого из следующего:
i. пальца, когда палец перемещается через входное отверстие в гнездо, чтобы палец мог переместиться в гнездо для фиксации в гнезде посредством указанного фиксатора, и
ii. соединенного с фиксатором ведущего элемента, который расположен у корпуса и может быть приведен в действие, чтобы перемещаться относительно корпуса соединителя, и
d. спусковой элемент, расположенный у корпуса и обеспеченный относительно гнезда так, что с ним обеспечена возможностью контакта указанного пальца, с возможностью его перемещения указанным пальцем относительно корпуса при перемещении указанного пальца по меньшей мере в одном, а предпочтительно в каждом, из (i) направления перемещения в гнездо, и (ii) направления движения из гнезда, для обеспечения перемещения соединенных фиксатора и ведущего элемента для их отсоединения, так что фиксатор способен, если он не находится в своем первом положении, перемещаться в свое первое положение посредством смещения.
Предпочтительно на шасси опирается гидравлический двигатель, который может обеспечивать гидравлическое давление для указанного привода (указанных приводов) указанного соединителя.
Предпочтительно обеспечен гидравлический контур, содержащий по меньшей мере один гидравлический клапан, который управляет гидравлическим давлением для указанного привода (указанных приводов).
Предпочтительно на указанное шасси опирается кабина для оператора указанной машины для земляных работ, которая должна быть расположена на шасси для управления указанной машиной для земляных работ.
Предпочтительно указанный гидравлический клапан может управляться оператором из указанной кабины.
Можно сказать, что в еще одном аспекте настоящее изобретение представляет собой соединитель для крепления к машине для земляных работ съемного оборудования, содержащего крепежный палец, причем соединитель содержит корпус соединителя, имеющий гнездо, имеющее область захвата для вмещения крепежного пальца, и фиксатор для захвата пальца в области захвата, когда он находится в положении фиксации относительно корпуса, причем фиксатор выполнен с возможностью перемещения относительно корпуса посредством приводимого в движение ведущим элементом в положение, в котором обеспечена возможность высвобождения пальца из области захвата, и спусковое устройство, обеспеченное указанным корпусом так, что палец ударяет о спусковое устройство, когда палец перемещается в область захвата или из области захвата, которое после этого перемещается для отсоединения ведущего элемента от фиксатора, после чего фиксатор способен переместиться назад в свое положение фиксации под действием смещения, действующего на фиксатор.
Можно сказать, что в еще одном аспекте настоящее изобретение представляет собой соединитель для крепления к машине для земляных работ съемного оборудования, содержащего крепежный палец, причем соединитель содержит корпус соединителя, имеющий гнездо, имеющее область захвата для вмещения крепежного пальца, и фиксатор для захвата пальца в области захвата, когда он находится в положении фиксации относительно корпуса, причем фиксатор выполнен с возможностью перемещения относительно корпуса посредством приводимого в движение ведущим элементом в положение, в котором обеспечена возможность высвобождения пальца из области захвата, и спусковое устройство, обеспеченное указанным корпусом так, что палец ударяет о спусковое устройство, когда палец перемещается в область захвата или из области захвата, которое после этого перемещается для отсоединения ведущего элемента от фиксатора, после чего фиксатор не ограничен ведущим элементом перемещаться назад, в свое положение фиксации.
Другие аспекты изобретения могут стать очевидными из следующего описания, которое приведено только в качестве примера и со ссылками на прилагаемые чертежи.
В контексте настоящего документа термин "и/или" означает "и" или "или", или как "и", так и "или".
В контексте настоящего документа, если после существительного в единственном числе следует существительное в множественном числе, заключенное в скобки, то это означает множественное и/или единственное число этого существительного.
В контексте настоящего описания [и формулы изобретения] термин "содержащий" означает "состоящий по меньшей мере частично из". При интерпретации высказываний в настоящем описании [и формуле изобретения], включающих этот термин, должны присутствовать все признаки, перед которыми стоит этот термин в каждом утверждении, но могут присутствовать и другие признаки. Родственные термины, такие как "содержит" или "содержащийся", должны интерпретироваться таким же образом.
Все раскрытия всех заявок, патентов и публикаций, упомянутых выше и ниже, если таковые имеются, включены в настоящий документ посредством ссылки.
Также можно сказать, что настоящее изобретение состоит из деталей, элементов и признаков, упомянутых или указанных в описании заявки, отдельно или вместе, и любых или всех комбинаций любых двух или более из указанных деталей, элементов или признаков, и если в настоящем документе упоминаются конкретные целые, которые имеют известные эквиваленты в области техники, к которой относится данное изобретение, такие известные эквиваленты считаются включенными в настоящее изобретение, как если бы они были сформулированы отдельно.
Ниже лишь в качестве примера приведено описание изобретения со ссылкой на прилагаемые чертежи:
фиг. 1А - вид сбоку съемного оборудования, например ковша, частично зацепленного с соединителем;
фиг. 1В - вид сбоку ковша, полностью соединенного с соединителем;
фиг. 2-6 - схематичный вид сбоку соединителя известного уровня техники, отцепляемого от пальцев съемного оборудования;
Фиг. 7-10 - схематичный вид сбоку соединителя известного уровня техники, зацепленного с пальцами съемного оборудования;
фиг. 11 - увеличенный схематичный вид сбоку фиксирующего устройства;
фиг. 12-22 - схематичный детальный вид сбоку пальца съемного оборудования, выходящего для фиксации фиксирующим устройством;
фиг. 23 - схематичный детальный вид сбоку фиксирующего устройства, вновь установленного в "режим подъема" после выхода пальца;
фиг. 24-31 - схематичный детальный вид сбоку пальца съемного оборудования, входящего в фиксирующее устройство после выхода пальца, например, как показано на фиг. 22 (первый режим зацепления);
фиг. 32-41 - схематичный детальный вид сбоку пальца съемного оборудования, выходящего из альтернативного варианта (второго варианта) осуществления фиксирующего устройства;
фиг. 42-45 - схематичный детальный вид сбоку пальца съемного оборудования, входящего в фиксирующее устройство, после того как фиксирующее устройство было в "режиме подъема" (второй режим зацепления);
фиг. 46-48 - схематичный детальный вид сбоку пальца съемного оборудования, входящего в фиксирующее устройство, после того как фиксирующее устройство было в "режиме подъема", а оператор приводит в действие фиксирующее устройство для зацепления (третий режим зацепления);
фиг. 49 - детальный вид сбоку фиксирующего устройства настоящего изобретения с подробным изображением смещения пружиной и ограничителей вращения;
фиг. 50 - аксонометрический вид сверху фиксирующего устройства настоящего изобретения;
фиг. 51 - вид сверху фиксирующего устройства настоящего изобретения; фиг.52 - схема гидравлической системы;
фиг. 53 - схема альтернативной гидравлической системы;
фиг. 54 - вид сбоку третьего варианта фиксирующего устройства;
фиг. 55 - вид сбоку третьего варианта фиксирующего устройства; дополнительные элементы удалены, чтобы показать ведущий элемент и спусковой элемент;
фиг. 56 - аксонометрический вид сверху сзади фиг. 55;
фиг. 57 - аксонометрический вид сверху сзади фиг. 55; корпус спускового элемента удален, чтобы показать гидравлический цилиндр ведущего элемента и пружины возврата;
фиг. 58-66 - схематичный детальный вид сбоку пальца съемного оборудования, входящего в фиксирующее устройство по третьему варианту в первом режиме зацепления;
фиг. 67-83 - схематичный детальный вид сбоку пальца съемного оборудования, выходящего из фиксирующего устройства по третьему варианту;
фиг. 84 - схематичный детальный вид сбоку, подчеркивающий устройство для зацепления ведущего элемента.
На указанных выше чертежах, на которых аналогичные признаки, в общем, имеют соответствующие обозначения, показано фиксирующее устройство 1, соответствующее первому аспекту изобретения.
На фиг. 1А и 1В показан быстродействующий соединитель С. Быстродействующий соединитель может состоять из корпуса 2, который может включать в себя множество точек 4А и 4В крепления для крепления быстродействующего соединителя к концевой части стрелы 7, например, экскаватора 5 (как показано на фиг. 2). Быстродействующий соединитель может быть присоединен и отсоединен от съемного оборудования А. В примере, показанном на фиг. 1А и 1В, съемное оборудование может представлять собой ковш экскаватора. Съемное оборудование А имеет два параллельных, расположенных на расстоянии друг от друга пальца Р1 и Р2, которые могут быть надежно вмещены в расположенных на расстоянии друг от друга гнездах R1 и, соответственно, R2 соединителя С. Для фиксации пальца Р1 в гнезде R1 используется фиксирующее устройство 1, содержащее первый фиксатор 6 (который здесь называется,/может называться просто фиксатор 6). Для фиксации пальца Р2 в гнезде R2 используется второй фиксатор 3. Второй фиксатор 3 может представлять собой, например, фиксатор 3, который посредством гидравлического цилиндра 40 может перемещаться между втянутым положением и выдвинутым положением, как показано на фиг. 52. Второй фиксатор 3 может представлять собой или включает в себя клиновидность, и может представлять собой штангу или пластину, или стержень, или т.п. В первом гнезде R1 обеспечено фиксирующее устройство 1. Положение фиксирующего устройства 1 и второго фиксатора 3 можно поменять местами в некоторых вариантах осуществления.
Корпус 2 быстродействующего соединителя С может состоять из двух основных пластин. На фиг. 1А показана основная пластина 500. Вторая основная пластина расположена на расстоянии от первой основной пластины и соединена с первой основной пластиной предпочтительно в параллельном положении. Основные пластины и/или другие детали корпуса предпочтительно определяют гнездо R1. Для таких целей пластины могут включать в себя краевые профили соответствующей формы. В гнезде R1 может быть вмещен палец Р1 (передний палец, например, съемного оборудования А). Палец Р1, а также палец Р2, когда они зацеплены с корпусом, проходят через корпус и выступают с боковых сторон основных пластин. Для удобства иллюстрации глубина соединителя на большинстве чертежей не показана, вместо этого на большинстве чертежей показан вид сбоку, со стороны основной пластины.
В своем полностью зафиксированном положении, как показано на фиг. 1А и 1В, фиксирующее устройство может надежно удерживать палец Р1 в области CR захвата гнезда R1, при этом палец Р1 не может быть извлечен из гнезда R1 через входное отверстие гнезда.
На фиг. 11 показана часть корпуса 2 соединителя С у гнезда R1. Гнездо R1 имеет входное отверстие М, достаточно большое для того, чтобы палец Р1 мог пройти через него в гнездо R1. Гнездо R1 может содержать область CR захвата, в которой палец Р1 может быть помещен и удерживаться без возможности выпадения, например, посредством фиксатора 6. Посадка в области захвата может быть свободной или с зазором. Промежуточным звеном между областью CR захвата и входным отверстием М является проход Р, как показано на фиг. 23. Палец может проходить, чтобы переместится через указанный проход Р гнезда R1 в область CR захвата в гнезде R1. Проход Р гнезда R1 может быть перекрыт, чтобы предотвратить выход пальца из области CR захвата, посредством (первого) фиксатора 6, смещенного в положение, при котором прохождение пальца в области захвата через проход Р перекрыт. В одном варианте осуществления, как показано на виде сборку фиг. 11, фиксатор 6 может выступать с одной стороны прохода, по меньшей мере частично поперек гнезда R1. Фиксатор предпочтительно изготовлен из стали. Фиксатор 6 в своем положении фиксации, которое в настоящем документе также называется его первым положением, как показано на фиг. 11, выступает достаточно далеко поперек гнезда R1, чтобы предотвратить извлечение пальца Р1 из области захвата. В предпочтительном варианте осуществления фиксатор 6 установлен с возможностью вращения относительно корпуса 2 (например, установлен с возможностью вращения относительно основных пластин и предпочтительно возле основных пластин) вокруг оси 15. Когда передний палец Р1 зацеплен, ось 15 фиксатора предпочтительно проходит параллельно продольной оси 16 переднего пальца P1.
В альтернативном варианте фиксатор 6 может быть установлен на корпусе для линейного перемещения.
Фиксатор 6 предпочтительно установлен на корпусе 2 на валу 17 фиксатора, чтобы сделать возможным вращение фиксатора 6 вокруг оси 15 фиксатора. На своих концах вал фиксатора может быть прикреплен к основным пластинам корпуса. Фиксатор 6 может вращаться по часовой стрелке вокруг собственной оси 15 из своего первого положения фиксации, показанного на фиг.11. Это может происходить, когда палец Р1 вводится в гнездо R1, в результате того, что палец толкает фиксатор из его первого положения по направлению к его второму положению, или посредством ведущего элемента, как будет описано ниже. Может быть предусмотрен ограничитель 33 вращения для предотвращения вращение фиксатора 6 против часовой стрелки из его положения фиксации, показанного на фиг. 11. Для ясности ограничитель 33 вращения на фиг. 11 не изображен, но он показан на фиг. 49. Понятно, что для предотвращения чрезмерного вращения фиксатора 6 может быть обеспечено множество альтернативных форм ограничителей вращения.
Фиксатор 6 может быть перемещен из своего положения фиксации пальца, показанного на фиг. 11, в положение высвобождения пальца, показанное на фиг. 16. Это может быть достигнуто благодаря использованию ведущего элемента 11. Ведущий элемент 11 может быть соединен с фиксатором 6. Это может быть обеспечено посредством использования выступа 8 фиксатора. Выступ фиксатора может представлять собой палец или поверхность фиксатора 6, или он может быть обеспечен на фиксаторе 6, который выполнен и приспособлен для обеспечения возможности соединения с ним привода 11. Фиксатор 11 может быть перемещен из первого положения, показанного на фиг. 11, во второе положение, показанное на фиг. 16. Ведущий элемент 11 может перемещаться посредством привода 9 ведущего элемента. Следует понимать, что исполнительный механизм 9 привода может иметь форму, например, механического или гидравлического цилиндра 9. Однако чаще он принимает форму гидравлического цилиндра 9 для надлежащего взаимодействия с гидравлическими конфигурациями, обычно используемыми на экскаваторах уровня техники.
Следует понимать, что ссылка на гидравлический цилиндр 9 здесь не исключает случаев, когда привод 9 ведущего элемента имеет механическую или иную негидравлическую форму, т.е. термины привод 9 ведущего элемента и гидравлический цилиндр 9 могут использоваться взаимозаменяемо.
Перемещение ведущего элемента 11 в его второе положение может вызвать вращение фиксатора 6 из его положения фиксации пальца в его состояние высвобождения, когда ведущий элемент и фиксатор соединены. Выступ 8 фиксатора расположен на расстоянии от оси 15 фиксатора 6, чтобы посредством ведущего элемента 11, когда он перемещается во второе положение, прикладывать к фиксатору 6 вращающую силу. Ведущий элемент 11 может состоять из области 19 соединения, которая может зацепляться и/или сцепляться другим способом с выступом 8 фиксатора с возможностью разъединения. Чтобы обеспечить возможность высвобождения пальца Р1 из гнезда R1, ведущий элемент 11, когда он соединен с фиксатором, может быть перемещен из своего первого положения, показанного на фиг. 11, в его второе положение, показанное на фиг. 16, чтобы по меньшей мере частично, если не полностью, убрать фиксатор 6 так, чтобы он не проходил поперек гнезда R1.
Примечательной особенностью некоторых видов и/или вариантов осуществления изобретения является то, что фиксатор 6 может полностью выходить из гнезда R1, так что не может быть никакого взаимодействия пальца с фиксатором 6, когда фиксатор не находится в своем втором положении, показанном на фиг. 16, 33, 46 и 73. Если фиксатор 6 был подвержен взаимодействию с пальцем Р1, то палец Р1 может толкать фиксатор за точку, в которой выступ 8 фиксатора может расцепиться с областью 19 соединения. Это полное вращение фиксатора 6, так что он удерживается вне гнезда в своем втором положении, или по меньшей мере помогает предотвратить случайное отсоединение.
В положении, показанном на фиг. 16, палец Р1 может выйти из гнезда R1 без помех со стороны фиксатора 6. Там, где делается ссылка на вход или выход из гнезда, следует иметь в виду, что это относится к системе отсчета, если смотреть на основную пластину 500 корпуса, например, как показано на фиг. 11. Фиксатор расположен рядом с первой основной пластиной 500, и аналогичным образом может быть обеспечен соответствующий фиксатор рядом со второй основной пластиной (не показана), а другие соответствующие компоненты удерживающего устройства могут быть аналогичным образом обеспечены на другой стороне корпуса быстродействующего соединителя.
Ведущий элемент 11 может направляться для перемещения (перемещение, предпочтительно вызванное приводом 9 ведущего элемента) вдоль траектории посредством канавки или паза 20 в корпусе, вдоль которой установлена ось 21 ведущего элемента 11. Ось 21 может скользить в пазу 20 для поступательного движения вдоль него. Ведущий элемент 11 предпочтительно установлен так, чтобы он мог вращаться на оси 22 ведущего элемента. Благодаря такому вращению ведущий элемент 11 выполнен с возможностью перемещения между показанным на фиг. 11 соединенным состоянием, сцепляющим ведущий элемент 11 с фиксатором 6 на выступе 8 фиксатора и в области 19 соединения, и показанным на фиг. 22 отсоединенным состоянием, в котором область 19 соединения и выступ 8 фиксатора отсоединены друг от друга. Паз 20 и ось 21 делают возможным такое вращение в примере, показанном на фиг. 11 и 22.
Кроме того, фиксирующее устройство 1 содержит спусковой элемент 10. Спусковой элемент 10 предпочтительно с возможностью вращения установлен на корпусе 2 на оси 23 спускового элемента, чтобы сделать возможным вращение спускового элемента 10 вокруг оси 24 спускового элемента. Спусковой элемент 10 расположен так, что пусковая область 25 спускового элемента по меньшей мере частично выступает или может выступать поперек гнезда R1. Предпочтительно спусковой элемент 10 и, таким образом, пусковая область 25 по меньшей мере частично выступает через проход Р, чтобы она могла быть расположен для контакта с пальцем, перемещающимся по проходу. Таким образом, с областью 25 спускового элемента контактирует палец Р1, когда палец Р1 проходит спусковой элемент 10 и, таким образом, область 25 спускового элемента может совершать вращательное движение вокруг своей оси 24 спускового элемента. Спусковой элемент может быть установлен не относительно корпуса, а для линейного перемещения (как показано в альтернативном варианте осуществления на фиг. 32-41). Предпочтительно спусковой элемент и гнездо имеют такую форму, что перемещение пальца по проходу не может происходить без контакта со спусковым элементом.
Кроме того, в некоторых конфигурациях спусковой элемент 10 может иметь область 26 отсоединения, которая может соответствующим образом взаимодействовать с ведущим элементом 11, чтобы управлять вращением ведущего элемента 11 вокруг своей оси 22 ведущего элемента. Ведущий элемент 11 может содержать штифтовой упор 27, который может прилегать к области 26 отсоединения спускового элемента 10.
В предпочтительном варианте осуществления ось 22 ведущего элемента, ось 15 фиксатора и ось 24 спускового элемента параллельны друг другу, а также параллельны оси 16 пальца, когда он удерживается или входит.
Чтобы объяснить, как работает фиксирующее устройство 1 настоящего изобретения, делается ссылка на ряд чертежей, приведенных на фиг. 12-23, на которых показан процесс отцепления пальца Р1, и на фиг. 24-31, на которых показан процесс зацепления пальца Р1.
На фиг. 12 показан палец Р1, безопасно и надежно удерживаемый в гнезде R1 посредством фиксатора 6. Чтобы палец Р1 мог быть извлечен из гнезда R1, вызывается перемещение ведущего элемента 11, когда он соединен с выступом 8 фиксатора. Оператором может быть приведен в действие привод 9 ведущего элемента (гидравлический цилиндр 9), чтобы вызвать перемещение ведущего элемента 11 в таком направлении, чтобы вызвать вращение по часовой стрелке фиксатора 6, как показано на фиг. 12-16.
В опциональном варианте осуществления гидравлический цилиндр 9 приводит в движение ведущий элемент 11 и гидравлический цилиндр 40 приводит в действие второй фиксатор 3. Как гидравлический цилиндр 9, так и гидравлический цилиндр 40 предпочтительно питаются от одного и того же гидравлического контура, как показано на фиг. 52. Для высвобождения съемного оборудования, в гидравлический цилиндр 40 подается давление, и второй фиксатор 3 втягивается для высвобождения пальца Р2, в предпочтительном варианте осуществления одновременно гидравлическим цилиндром 9 посредством ведущего элемента 11 втягивается первый фиксатор 6, чтобы сделать возможным высвобождение пальца P1. Однако первый фиксатор 6 возвращается в свое исходное положение фиксации без какого-либо гидравлического давления, так как механический спусковой элемент 10 фиксирующего устройства 1 срабатывает вследствие выхода переднего пальца P1. Для крепления съемного оборудования А из вышеописанного положения пальцы Р1 и Р2 вводятся в соответствующие гнезда R1 и R2. При реверсе или сбросе гидравлического давления гидравлический цилиндр 40 выдвигает второй фиксатор 3 для фиксации заднего пальца Р2. Благодаря вышеописанной работе спускового элемента 10 первый фиксатор 6 от этого выдвигания второго фиксатора 3 не зависит. Однако ведущий элемент 11 зацеплен с гидравлическим цилиндром 9, и при реверсе или сбросе гидравлического давления гидравлического цилиндра ведущий элемент 11 может вернуться в свое первое положение, например, вследствие смещения (например, посредством пружины).
Продолжающееся перемещение ведущего элемента 11 в его второе положение вызывает вращение фиксатора 6 по часовой стрелке в достаточной степени, чтобы больше не мешать извлечению пальца Р1 из гнезда R1. Вследствие такого перемещения фиксатор 6 может быть полностью убран, так что он не выступает в гнездо R1, как показано на фиг. 16, или он может все еще частично выступать в гнездо R1, как показано на фиг. 15. В предпочтительном варианте фиксатор 6 полностью удален из гнезда R1. Предпочтительно палец Р1 не может толкать фиксатор 6 в это положение (как показано на фиг. 16-19), так как из-за этого фиксатор 6 может снова зацепиться с ведущим элементом 11.
Когда фиксатор 6 находится во втянутом положении, как, например, показано на фиг. 16, оператор может перемещать стрелу экскаватора и, следовательно, быстродействующий соединитель С, чтобы извлечь палец из гнезда R1. Пока фиксатор 6 удален из гнезда R1, ведущий элемент 10 своей пусковой областью 25 выступает в гнездо R1. Пусковая область выступает в гнездо R1 достаточно далеко, так что она контактирует с пальцем Р1, когда палец Р1 выходит из гнезда R1.
Понятно, что в гнезде R1 могут регистрироваться пальцы разного съемного оборудования, имеющие различные размеры. Следовательно, важно, чтобы пусковая область 25 была достаточно большой, чтобы она могла контактировать с пальцами различного размера, когда такие пальцы выходят из гнезда, и чтобы пальцы не могли проходить пусковую область 25, не приводя в действие спусковой элемент 10. Таким образом, с целью иллюстрации показан небольшой палец Р1, выходящий из гнезда R1, чтобы показать экстремальный случай и то, как небольшой палец все еще может проводить в действие спусковой элемент 10. Аналогично при вводе пальца показан большой палец Р1, входящий в гнездо R1. Большой палец Р1 показан для того, чтобы показать экстремальный случай и то, как большой палец не вызывает зацепления фиксатора 6 с областью 25 соединения, как описано ниже.
Приведение спускового элемента в действие происходит тогда, когда сила пальца Р1 при его извлечении или вводе в область захвата действует на спусковой элемент 10 и вызывает движение спускового элемента 10, например, посредством вращения вокруг оси 24 спускового элемента. В ориентации, показанной на чертежах, такое вращение происходит против часовой стрелки. По мере того как палец выходит из гнезда R1, как показано на ряде чертежей (см. фиг. 18 и 19), вращение спускового элемента 10 против часовой стрелки вокруг оси 24 спускового элемента приводит в тому, что область 26 отсоединения прикладывает силу к штифтовому упору 27 ведущего элемента 11. Это вызывает отсоединение между выступом 8 фиксатора 6 и областью 19 соединения ведущего элемента 11.
После отсоединения ведущего элемента 11 от фиксатора 6, фиксатор 6 может вращаться назад, к своему положению фиксации. Он уже не удерживается ведущим элементом 11 в своем состоянии высвобождения, как показано на фиг. 18, а может вращаться против часовой стрелки назад, к своему положению фиксации. Фиксатор 6 предпочтительно смещен в свое положение фиксации посредством пружины, такой как торсионная пружина 31, действующая вокруг оси 15 фиксатора. Пример смещения пружиной показан на фиг. 49-51. Это помогает смещать фиксатор в его положение фиксации, когда ведущий элемент отсоединяется.
Благодаря движению пальца Р1 из гнезда R1 после отсоединения ведущего элемента 11 и фиксатора 6 фиксатор 6 может вращаться к своему положению фиксации, как показано на фиг. 22. Палец Р1 и фиксатор 6 могут быть в контакте во время этого движения, но палец Р1 уже не удерживается в гнезде R1 фиксатором 6.
Как видно из фиг. 20-22, предпочтительной геометрией фиксатора 6 является такая геометрия, что его возвращению в свое положение фиксации мешает палец Р1, когда палец Р1 входит в контакт с пусковой областью 25 спускового элемента. Это означает, что спусковой элемент 10 может вызвать отсоединение зацепления между ведущим элементом и фиксаторами (например, между выступом 8 фиксатора и областью 19 соединения) только после того, как палец Р1 будет в достаточной степени извлечен из гнезда R1, чтобы он не встречал препятствий для дальнейшего перемещения из гнезда R1 со стороны фиксатора 6 после отсоединения фиксатора 6. Как видно из фиг. 20-22, фиксатор 6 начинает прижиматься к пальцу Р1, как только происходит отсоединение элемента. Однако, если палец Р1 извлекается быстрее, или смещение фиксатора 6 слабое, или более медленное, чем необходимо, чтобы вызвать перемещение фиксатора 6 (например, посредством использования гидравлического аккумулятора), то фиксатор 6 к пальцу Р1 при его выходе не прижмется.
На фиг. 23 показано фиксирующее устройство, возвращенное в свое первое положение, показанное на фиг. 11. Этап между вращением фиксатора 6 в свою самую нижнюю точку (фиг. 22) и повторным зацеплением ведущего элемента 11 с фиксатором 6 (фиг. 23) состоит в том, что привод 9 ведущего элемента позволил или вызвал возвращение ведущего элемента 11 в его первое положение. Ведущий элемент 11 благодаря вращательному и боковому смещению пружиной (посредством пружины 31) может перемещаться назад, в свое соединенное состояние, чтобы снова сцепиться с фиксатором 6.
Если оператор вызывает высвобождение приведения в действие ведущего элемента 11, например, посредством приведения в действие привода 9 ведущего элемента (например, посредством сброса гидравлического давления привода 9 ведущего элемента) или
a) прежде чем фиксатор 6 полностью поднимется (то есть фиксатор 6 все еще соединен с ведущим элементом 11), или
b) прежде чем выйдет палец (то есть палец Р1 не привел в действие спусковой элемент 10), тогда фиксатор 6 возвращается назад в свое положение фиксации.
На чертежах показано, как оператор вызывает высвобождение ведущего элемента 11 на этапе, показанном на фиг. 23, когда палец Р1 вышел из гнезда R1. Тем не менее, оператор может высвободить ведущий элемент 11 с этапа, показанного на фиг. 20, на котором спусковой элемент 10 был приведен в действие, чтобы расцепить соединение ведущего элемента 11 с фиксатором 6 на выступе 8 фиксатора. На фиг. 19 показана точка переключения, в которой выступ 8 фиксатора собирается расцепиться с областью 19 соединения.
В предпочтительном варианте, как сказано выше, фиксатор 6 предпочтительно смещен в свое положение фиксации, например, посредством торсионной пружины 30, как показано на фиг. 49-51. Кроме того, возможно смещение ведущего элемента 11. Такое смещение возможно благодаря тому, что пружина 31 толкает ведущий элемент 11 в его положение соединения, как показано на фиг. 49. На фиг. 49 показана та же самая пружина 31, действующая между корпусом 2 и ведущим элементом 11 в направлении смещения ведущего элемента 11, в направлении вращения против часовой стрелки. Это побуждает ведущий элемент 11 перемещаться посредством своего вращательного и поступательного соединения в свое первое положение. В других вариантах осуществления, которые не показаны, функция пружины 31 может быть достигнута посредством более одной пружины.
Спусковой элемент 10 может свободно плавать, кроме того, в предпочтительном варианте осуществления смещенный ведущий элемент 11 нажимает на спусковой элемент 10, чтобы, в свою очередь, смещать спусковой элемент 10. Альтернативно к спусковому элементу 10 также может быть применено отдельное смещение. Это смещение может обеспечиваться посредством пружины (в этом варианте осуществления не показана, но показана в виде пружины 34 в альтернативном варианте осуществления, изображенном на фиг.55), действующей между корпусом 2 и спусковым элементом 10 по часовой стрелке, как показано на чертежах. Напрямую или опосредованное смещение спускового элемента 10 помогает возвращать спусковой элемент 10 в положение, в котором пусковая область 25 выступает в гнездо R1.
Предпочтительно спусковой элемент может входить в контакт с ведущим элементом, когда палец зацеплен со спусковым элементом, и выходить из контакта с ведущим элементом, когда палец не контактирует со спусковым элементом. Альтернативно спусковой элемент постоянно находится в контакте в рабочем положении с ведущим элементом. В альтернативных вариантах, описанных ниже, спусковой элемент и ведущий элемент могут перемещаться вместе относительно корпуса соединителя между соединенным состоянием и отсоединенным состоянием ведущего элемента. Предпочтительно спусковой элемент может вызвать отсоединение ведущего элемента от фиксатора, так что фиксатор не удерживается ведущим элементом от перемещения в его первое положение.
Оператор может войти в режим подъема посредством перехода из положения соединителя, показанного на фиг. 22, в положение, показанное на фиг. 23. Режим подъема - это режим, в котором первый и второй фиксаторы 6 и 3 находятся в положении фиксации, но пальцев в соответствующих гнездах нет. В предпочтительном варианте осуществления оператор может вызвать перемещение соединителя из этапа, показанного на фиг. 22, в этап, показанный на фиг. 23 (то есть в режим подъема), посредством активации реверса или сброса гидравлического давления, так что фиксатор 3 выдвигается в свое положение фиксации (показано на фиг. 1В), а так как гидравлическое давление сброшено и для привода 9 ведущего элемента, ведущий элемент 11 может быть смещен назад, чтобы он сцепился с фиксатором 6.
ЗАЦЕПЛЕНИЕ - ПЕРВЫЙ РЕЖИМ
На фиг. 24-31 показано, как в первом режиме зацепления палец Р1 может быть зацеплен с соединителем С для фиксации посредством соединителя С. В первом режиме зацепления, например, из гнезда R1 был удален старый палец, и необходимо поменять его на новый палец Р1 другого съемного оборудования. Оператор инициировал приложение гидравлического давления (или аналогичное средство для приведения в действие, такое как механический винт или тому подобное), чтобы вызвать втягивание второго фиксатора 3 и подъем первого фиксатора 6. Старый палец извлекается, что приводит в действие спусковой элемент 10, и первый фиксатор 6 перемещается в свое положение фиксации. Следует отметить, что ведущий элемент 11 все еще находится на расстоянии от своего смещенного положения (то есть он находится во втором положении), потому что он удерживается там гидравлическим цилиндром 9. Затем, как показано на фиг. 24, оператор может ввести в гнездо R1 новый палец, который закрепляется в гнезде R1 посредством первого фиксатора 6. Хотя ведущий элемент еще не вернулся в положение соединения с фиксатором, который находится в своем первом положении. Оператор вводит палец Р2 в гнездо R2, а второй фиксатор 3 выдвигается для перемещения в положение фиксации пальца Р2. Удержание пальца Р2 может быть достигнуто независимо от фиксации пальца Р1.
Первый режим зацепления является наиболее типичным режимом, когда оператор производит замену съемного оборудования.
На фиг. 24 фиксирующее устройство 1 показано в своем положении фиксации. Фиксатор 6 находится в своем положении фиксации (без пальца в гнезде R1) и частично проходит в гнездо R1 после приведения в действие и возвращения в исходное положение в результате выхода старого пальца из гнезда R1. Ведущий элемент 11 все еще находится в своем рабочем положении. Затем оператор манипулирует быстродействующим соединителем, чтобы ввести новый палец Р1 в гнездо R1 через входное отверстие М. Это перемещение пальца Р1 в гнездо R1 вызывает вращение фиксатора 6 по часовой стрелке, как показано на фиг. 25. Выступ 8 может противодействовать ведущему элементу 11, но снова не защелкивается.
Предпочтительным признаком, предотвращающим повторное зацепление ведущего элемента 11 и выступа 8 (то есть в области соединения) является направляющая поверхность 28, показанная на фиг. 24. Направляющая поверхность упирается в выступ 8 или другую часть ведущего элемента 11, чтобы предотвратить зацепление ведущего элемента 11 и фиксатора 6. Когда палец Р1 входит в гнездо, палец Р1 входит в контакт с фиксатором 6. Выступ 8 фиксатора 6 упирается в направляющую поверхность ведущего элемента 11 и, таким образом, предотвращает зацепление между ведущим элементом и фиксатором до тех пор, пока ведущий элемент не вернется в положение, в котором он может сцепиться с фиксатором, когда фиксатор находится в своем первом положении. Ведущий элемент предпочтительно возвращается в свое первое положение медленнее, чем фиксатор. В этом варианте осуществления спусковой элемент 10 может свободно плавать, что касается перемещения, вызванного пальцем Р1.
Палец Р1 может переместиться до полной посадки в гнезде R1 благодаря тому, что фиксатор 6 может вращаться на холостом ходу и пропускать палец Р1. Поскольку палец Р1 в достаточной степени прошел мимо фиксатора 6, как показано на фиг. 28 и 29, фиксатор 6 под действием вышеописанного смещения может вращаться против часовой стрелки в свое положение фиксации.
Во время перемещения пальца Р1 в гнездо R1 спусковой элемент 10 также может быть перемещен из своего активного положения, показанного на фиг.24, в свое отсоединенное положение, показанное на фиг. 25 и 26. Однако при этом спусковой элемент 10 не активен ни в отношении возврата фиксатора 6 в свое положение фиксации, ни в отношении создания или отсоединения соединения между выступом 8 фиксатора и областью 19 соединения, так как фиксатор 8 не соединен с ведущим элементом 11. В этом случае спусковой элемент 10 работает вхолостую и может уйти с пути, по которому проходит палец Р1, когда палец Р1 входит в гнездо R1.
Поскольку палец P1 полностью посажен в гнездо R1, или фиксатор 6 может пройти мимо пальца Р1, фиксатор 6 посредством своего вращательного смещения перемещается в свое положение фиксации, показанное на фиг. 29. В этой точке оператор (поскольку передний палец Р1 удерживается) в предпочтительном варианте осуществления сбрасывает или реверсирует гидравлическое давление для гидравлического цилиндра 40, так что задний палец Р2 может быть удержан фиксатором 3. Одновременно ведущий элемент 11 может вернуться в свое смещенное положение, как показано на фиг. 30 и 31.
Ведущий элемент 11 может быть снова возвращен или он снова возвращен в свое первое положение для зацепления с выступом 8 фиксатора после активации или гидравлического реверса, или приведения в действие привода 9 ведущего элемента, связанного с ведущим элементом 11, как показано на фиг. 31.
Затем ведущий элемент 11 сцепляется с фиксатором 6, чтобы он снова мог вращать фиксатор 6 в его состояние высвобождения, чтобы сделать возможной высвобождение пальца Р1 из гнезда R1, как показано на фиг. 12-23.
Пусковая область 25 спускового элемента 10 имеет такую форму, что она может действовать в качестве криволинейной поверхности, обеспечивающей перемещение пальца Р1 мимо спускового элемента 10. Пусковая область 25 предпочтительно имеет закругленную поверхность, не задерживающую движение пальца Р1 в гнездо R1 и из гнезда R1. Это позволяет вращать спусковой элемент 10 вокруг оси 24 спускового элемента, не мешая при этом движению пальца Р1 во время его перемещения в гнездо R1 и из гнезда R1.
Фиксатор 6 имеет такую форму, что, когда палец находится в гнезде R1, а фиксатор 6 находится в своем положении фиксации, он удерживает палец Р1 в гнезде R1 до тех пор, пока фиксатор 6 не будет активно перемещен в свое состояние высвобождения. Как было описано выше, ограничитель 33 обеспечивает предотвращение вращения фиксатора 6 за определенный предел, тем самым гарантируя, что палец Р1 останется надежно закрепленным в своем гнезде R1, когда фиксатор 6 находится в своем положении фиксации.
Геометрия фиксатора 6 предпочтительно сконфигурирована так, что фиксатор 6 не зацеплен с приведенным в действие ведущим элементом 11, когда палец Р1 помещен в гнездо R1 (а фиксатор 6 вращается в свое состояние высвобождения, как показано на фиг. 26). Как видно из фиг. 25-30, ведущий элемент 11 не предотвращает (то есть, не сцепляется с фиксатором 6) смещение назад фиксатора 6 в его положение фиксации под действием его торсионной пружины 30 (показано на фиг. 49). В альтернативном варианте осуществления единственным, что вызывает перемещение ведущего элемента 11 для предотвращения зацепления выступа 8 с ведущим элементом 11, когда палец Р1 входит в гнездо R1, является форма спускового элемента 10.
Геометрия вокруг области выступа 8 важна для обеспечения того, чтобы ведущий элемент 11 не ограничивал перемещение назад фиксатора 6 в свое положение фиксации, поскольку палец Р1 в достаточной степени введен в его гнездо R1. Форма фиксатора 6 и область 26 отсоединения, относящаяся к штифтовому упору 27, важны для того, чтобы не препятствовать перемещению выступа 8 фиксатора между первым положением и вторым положением фиксатора посредством ведущего элемента 11, поскольку палец Р1 в достаточной степени находится внутри гнезда R1.
Затем может произойти последующее вращательное перемещение ведущего элемента 11 назад, к его положению соединения.
В одном варианте осуществления оператор может вызвать зацепление пальца Р1 посредством второго и третьего режима зацепления соединителя.
1) Во втором режиме зацепления - ранее соединитель находился в режиме подъема (в первом режиме). То есть по меньшей мере фиксатор 6 находится в положении фиксации и соединен с ведущим элементом 11. Оператор манипулирует соединителем С так, что палец перемещается в гнездо R1, как показано на фиг. 42-45, без втягивания фиксатора 6. Разница между вторым режимом зацепления и первым режимом зацепления состоит в том, что во втором режиме ведущий элемент 11 в его второе положение не переводится.
2) В третьем режиме зацепления ранее соединитель находился в режиме подъема (в первом режиме). То есть по меньшей мере фиксатор 6 находится в положении фиксации и соединен с ведущим элементом 11. Оператор вызывает втягивание фиксатора 6 посредством приведения в действие ведущего элемента 11. Оператор манипулирует соединителем С так, что палец перемещается в гнездо R1, спусковой элемент 10 приводится в действие, чтобы установить фиксатор 6 назад в его положение фиксации - этот процесс частично показан на фиг.46-48. После этого оператор вводит палец Р2 в гнездо R2, а затем сбрасывает рабочее давление, чтобы фиксатор 3 мог вернуться в свое положение фиксации, чтобы удерживать палец Р2. Удержание пальца Р1 не зависит от фиксации пальца Р2.
VI АЛЬТЕРНАТИВНЫЙ ВАРИАНТ
В одном примере ведущий элемент предпочтительно установлен относительно корпуса с возможностью вращательного движения только для перемещения между соединенным и отсоединенным состоянием. Предпочтительно спусковой элемент установлен относительно корпуса только с возможностью вращательного движения. Предпочтительно установка спускового элемента, фиксатора и ведущего элемента с возможностью вращения относительно корпуса осуществляется так, что они могут вращаться вокруг соответствующих осей вращения, которые параллельны друг другу. Предпочтительно спусковой элемент выполнен с возможностью вызывать перемещение ведущего элемента относительно корпуса и фиксатора, чтобы отцепить ведущий элемент от фиксатора. Предпочтительно спусковой элемент расположен для контакта с пальцем как при выходе, так и при входе пальца из области захвата. Предпочтительно фиксатор, когда он находится в указанном первом положении, предотвращает выход указанного пальца, когда указанный палец удерживается в гнезде, и может быть перемещен против смещения, действующего на фиксатор, чтобы сделать возможным вход указанного пальца в область захвата мимо фиксатора. Является предпочтительным, чтобы фиксатор во втором положении располагался так, чтобы он не контактировал пальцем, когда палец находится в гнезде.
Ниже со ссылкой на фиг. 32-41 описывается вариант осуществления элемента, показанного на фиг. 11-31 и 42-51. В этом варианте вместо того, чтобы ведущий элемент 11 тянул фиксатор 6 из его положения 6а фиксации в полностью втянутое положение 6b, ведущий элемент 11 выполнен с возможностью толкания фиксатора 6 из его положения фиксации во втянутое положение. На фиг. 32 показан соединитель С, имеющий переднее гнездо R1, в которое введен передний палец Р1. На фиг. 32-41 показан палец Р1, который может быть извлечен из соединителя в результате перевода фиксатора в состояние высвобождения. Последующее отсоединение спускового элемента посредством пальца Р1 вызывает возвращение фиксатора в его положение блокировки. Чертежи для этого варианта с входом пальца не показаны.
В качестве части фиксирующего устройства 1 обеспечен фиксатор 6, установленный с возможностью вращения на корпусе 2 соединителя С для вращения вокруг своей оси 15 вращения фиксатора. Выступ 8 фиксатора, образующий его часть или зацепленный с ним, также вращается вместе с фиксатором 6. Выступ 8 фиксатора может быть введен в контакт и соединен посредством ведущего элемента 11, который может приводиться в действие посредством привода 9 ведущего элемента. В этом варианте осуществления соединение и отсоединение не обязательно означает соединение и, соответственно, разъединение. Ведущий элемент 11 может быть соединен или все еще не соединен с фиксатором 6, когда он отсоединен, но ведущий элемент 11 не приводится в движение или не может передавать усилие на фиксатор 6, пока он не будет соединен. То есть вместо того чтобы расцеплять ведущий элемент 11 от выступа 8 фиксатора, может быть отсоединен привод для ведущего элемента. В показанном варианте осуществления ведущий элемент 11 расцепляется механически, посредством выхода из контакта с выступом 8.
Привод 9 ведущего элемента может перемещать (между положением 9а и 9В) ведущий элемент 11, когда он соединен, чтобы нажать на выступ 8 и вызвать перемещение фиксатора 6 из его положения фиксации, показанное на фиг. 32, в состояние высвобождения, показанное на фиг. 35. Сам ведущий элемент 11 может как перемещаться, так и вращаться. Ведущий элемент 11, например, может быть установлен с возможностью вращения на приводе 9 ведущего элемента, на оси 21 ведущего элемента, чтобы определить ось 22 для ведущего элемента 11.
Предпочтительным признаком, предотвращающим повторное зацепление ведущего элемента 11 и выступа 8 (то есть в области соединения) является направляющая поверхность 28, показанная на фиг. 39. Направляющая поверхность упирается в выступ 8 или другую часть ведущего элемента 11, чтобы предотвратить зацепление ведущего элемента 11 и фиксатора 6. Когда палец Р1 входит в гнездо, палец Р1 контактирует с фиксатором 6 и вращает его. Выступ 8 фиксатора 6 упирается в направляющую поверхность ведущего элемента 11 и, таким образом, помогает предотвратить зацепление между ведущим элементом и фиксатором. В этом варианте осуществления спусковой элемент 10 может перемещаться благодаря ведущему элементу 11, зацепленному со спусковым элементом 10.
Аналогично фиксирующему устройству 1, описанному со ссылкой на фиг.11-31, обеспечен спусковой элемент 10, который может перемещаться пальцем Р1, входящим и выходящим из гнезда R1. Когда фиксатор 6 находится в своем втянутом положении, как показано на фиг.35, извлечение пальца Р1 из гнезда R1, как показано на фиг. 36-39, может вызвать перемещение спускового элемента 10 и отсоединение им ведущего элемента 11 от выступа 8 фиксатора. Аналогично фиксирующему устройству 1, показанному на фиг. 11-31, спусковой элемент 10 содержит паз для перемещения или направления ведущего элемента 11. Паз 26 образован спусковым элементом 10, как показано на фиг. 32, и удерживает штифтовый упор 27 ведущего элемента 11. Паз также содержит или представляет собой область 26 отсоединения, которая зацепляет штифтовой упор 27 ведущего элемента 11. Область 26 отсоединения делает возможным приведение в действие штифтового упора 27 (между положениями 10а и 10с) ведущего элемента 11 для перемещения вдоль определенной поверхности отсоединения или паза 26, образованного ведущим элементом 10.
Расцепление ведущего элемента 11 и выступа 8 может вызвать отсоединение (если спусковой элемент находится в положении 10с) и отскок фиксатора 6 назад в положение фиксации, поскольку он отцеплен от ведущего элемента 11. отсоединение может не произойти между положениями 10а и 10b, но происходит после прохождения положения 10b в направлении положения 10с.
Понятно, что в этом варианте осуществления перемещение спускового элемента 10 может быть линейным по отношению к корпусу 2. В других вариантах осуществления при спуске спускового элемента он совершает только вращательное движение. Предусмотрено, что это также может быть комбинация вращательного движения и линейного перемещения.
Предусмотрено, что комбинация первого варианта (показанного по меньшей мере на фиг. 11) и альтернативных вариантов (показанных по меньшей мере на фиг. 32 и 54) входит в объем изобретения.
В первом варианте осуществления, показанном по меньшей мере на фиг. 11, в отсоединенном положении ведущий элемент 11 и фиксатор 6 предпочтительно разъединены. В других вариантах осуществления ведущий элемент 11 и фиксатор 6 соединены, но находятся в отсоединенном положении, так что ведущий элемент 11 не может управлять положением фиксатора 6. Таким образом, ведущий элемент 11 не может приводить в движение фиксатор 6, но он все еще может следовать за фиксатором 6 и быть соединенным с ним, подобно варианту, показанному по меньшей мере на фиг. 32. И аналогично соединенному положению ведущего элемента 11 и фиксатора 6 ведущий элемент 11 и фиксатор 6 могут быть соединены или не соединены друг с другом, но в обоих вариантах осуществления в соединенном положении ведущий элемент 11 может действовать на фиксатор 6.
Ведущий элемент 11 может быть приведен в действие вручную, например, посредством элемента с винтовой нарезкой. Альтернативно ведущий элемент 11 может приводиться в действие посредством гидравлического цилиндра. В предпочтительном варианте для соединителя обеспечено два гидравлических цилиндра для приведения в действие как ведущего элемента 11 (привод 9), так и второго фиксатора 3 (привод 40) - это показано на фиг. 52.
Предпочтительно спусковой элемент или фиксатор (например, выступ фиксатора) могут быть зацеплены с областью ведущего элемента, чтобы удерживать ведущий элемент в положении, предотвращающем соединение ведущего элемента с фиксатором. Предпочтительно на спусковом элементе может быть размещен или расположен один или несколько из следующих элементов: привод ведущего элемента, ведущий элемент и пружина ведущего элемента. Предпочтительно выступ фиксатора зацеплен с областью ведущего элемента, чтобы удерживать ведущий элемент и связанный с ним спусковой элемент, когда фиксатор не соединен с ведущим элементом в положении для предотвращения указанного соединения.
Ниже со ссылкой на фиг. 54-83 описывается вариант осуществления вышеописанного элемента. Этот вариант имеет такие же ссылочные обозначения, как те, которые использовались в двух предыдущих вариантах. В этом варианте ведущий элемент 11 является частью узла 60 ведущего элемента, расположен на нем и опирается на него. Узел 60 ведущего элемента содержит ведущий элемент 11, привод 9 ведущего элемента, пружину 31 возврата, выступающую часть, которая выступает в гнездо R1, чтобы действовать в качестве спускового элемента 10, а также другие детали. Спусковой элемент 10 может приводить в действие узел ведущего элемента, чтобы узел ведущего элемента вращался вокруг оси 21, когда он перемещается посредством внешней силы, например, в результате входа или выхода пальца из гнезда R1.
Наличие узла 60 ведущего элемента, на который опирается ведущий элемент 10, означает меньшее число соединений соединительного устройства с корпусом 2. Например, в варианте, показанном на фиг. 55, узел 60 ведущего элемента/ведущий элемент 11, как и спусковой элемент 10, использует одну и ту же точку соединения с корпусом 2, представляющую собой ось 21 ведущего элемента/спускового элемента или узла ведущего элемента. В этом варианте осуществления ось 21 узла ведущего элемента действует в качестве оси, вокруг которой может вращаться ведущий элемент 11 и спусковой элемент 10.
Благодаря уменьшению числа точек соединения с корпусом 2 соединительное устройство может быть проще в изготовлении и/или иметь модульную конструкцию для разных размеров корпуса 2. Модульное исполнение соединительного устройства позволяет использовать его в корпусах, имеющих разный размер для машин разного размера. Уменьшение точек соединения позволяет увеличить эффективность производства, а также может помочь при ремонте и/или техническом обслуживании соединительного устройства.
В этом варианте осуществления относительно спускового элемента 10, привода и фиксатора 6 ведущий элемент 11 перемещается только посредством поступательного движения. Тем не менее, благодаря тому, что узел 60 ведущего элемента может вращаться вокруг оси 21, ведущий элемент 11 также движется по вращательной траектории. Узел 60 ведущего элемента вращается, когда палец Р1 вызывает перемещение пусковой области 25.
Узел 60 ведущего элемента содержит гидравлический цилиндр 9, чтобы приводить в движение ведущий элемент 11. Узел ведущего элемента содержит пружину 31 возврата, чтобы поджимать назад/возвращать ведущий элемент 11 аналогично предыдущим вариантам. Однако в этом варианте пружина 31 возврата представляет собой не торсионную пружину, а пружину растяжения.
Аналогично предыдущему варианту осуществления спусковой элемент 10 предпочтительно имеет две пусковые области 25, которые проходят в гнездо R1. Одна из указанных областей предназначена для контакта при входе пальца, другая - для контакта при выходе пальца. Как показано на фиг. 56, узел 60 ведущего элемента имеет промежуточную часть 510 корпуса, которая составляет одно целое со спусковым элементом 10 или зацеплена с ним. Часть 510 корпуса может вмещать гидравлический цилиндр 9 и пружины 31 возврата, которые приводят в движение и, соответственно, втягивают ведущий элемент 11. На фиг. 57 показан спусковой элемент 10, гидравлический цилиндр 9 и пружины 31 возврата, но для наглядности на этом чертеже скрыта промежуточная часть корпуса. Пружины 31 возврата на одном конце прикреплены к спусковому элементу 10, на другом конце - к ведущему элементу 11.
Ведущий элемент 11 может поступательно перемещаться относительно спускового элемента 10. В показанном на чертежах варианте осуществления ведущий элемент 10 поступательно перемещается относительно спускового элемента 10 по линейной траектории перемещения, которая может проходить радиально относительно оси вращения оси 21 ведущего элемента. При работе ведущий элемент 11 посредством направляющего средства может быть направлен вдоль своей линейной траектории перемещения. В показанном варианте осуществления направляющее средство представляет собой выступ 48 и комплементарный направляющий канал 47. Выступ 48 расположен на ведущем элементе 11, а комплементарный направляющий канал 47 является частью узла 60 ведущего элемента. Выступ 48 виден на фиг. 55, направляющий канал 47 - на фиг. 57. Может иметься множество элементов и конфигураций, благодаря которым ведущий элемент 11 может быть установлен вместе с узлом ведущего элемента с возможностью поступательного движения относительно спускового элемента 10.
Ведущий элемент 11 работает, выполняя ту же функцию, что и в описанном предыдущем варианте осуществления. Ведущий элемент 11 содержит область 19 соединения, которая может зацепляться с выступом 8 на фиксаторе 6. Когда ведущий элемент 11 посредством гидравлического привода 9 приводится в движение вперед, фиксатор 6 принудительно вращается вокруг своей оси вращения, так что область фиксатора 6, проходящая в гнездо R1, извлекается из отверстия гнезда, чтобы через него мог пройти палец PL Когда палец Р1 проходит через указанное место, он сталкивается с областью 25 спускового элемента 10, чтобы, таким образом, привести в действие спусковой элемент 10, чтобы поднять узел 40 ведущего элемента и повернуть спусковой элемент 10 вокруг оси 21. При этом область 19 соединения расцепляется, так что ведущий элемент 11 уже не зацеплен с фиксатором 6. Таким образом, после этого фиксатор 6 посредством торсионной пружины 31 возврата смещен назад, в отверстие гнезда R1.
Признаком, предотвращающим повторное зацепление ведущего элемента 11 и выступа 8 (то есть с областью соединения) является направляющая поверхность 28, показанная на фиг. 57-59. Направляющая поверхность 28 упирается в выступ 8 или другую часть ведущего элемента 11, чтобы помочь предотвратить зацепление ведущего элемента 11 и фиксатора 6. Когда палец Р1 входит в гнездо R1, палец Р1 контактирует с фиксатором 6 и вращает его. Выступ 8 фиксатора 6 упирается в направляющую поверхность 28 ведущего элемента 11 и, таким образом, предотвращает зацепление между ведущим элементом и фиксатором. В этом варианте осуществления спусковой элемент 10 перемещается с ведущим элементом 11, так как ведущий элемент 11 расположен напрямую на спусковом элементе 10.
В этом варианте осуществления на фиг. 26 область отсоединения отсутствует, так как теперь уже ведущий элемент 11 расположен на спусковом элементе 10. Таким образом, перемещение спускового элемента 10, когда он приведен в действие, напрямую вызывает перемещение расположенного на нем ведущего элемента 11.
Комбинация ведущего элемента 11 и спускового элемента 10 может быть названа узлом спускового элемента/ведущего элемента. Область 25 отсоединения может быть расположена на ведущем элементе 11 или приводе ведущего элемента узла спускового элемента/ведущего элемента. Эта альтернатива не показана.
Чтобы объяснить фиксирующее устройство 1, показанное на фиг. 54-57, делается ссылка на ряд чертежей, приведенных на фиг. 58-66, на которых показан процесс зацепления пальца Р1, и на фиг. 67-83, на которых показан процесс отцепления пальца Р1.
На фиг. 58-66 показан вход пальца в фиксирующее устройство 1, когда фиксирующее устройство работает в первом режиме зацепления, который является наиболее типичным режимом, когда оператор производит замену съемного оборудования. В первом режиме зацепления ведущий элемент 11 уже выдвинут вследствие предыдущего процесса отцепления.
На фиг. 58 показан ведущий элемент 11 и, в этом варианте осуществления, связанный с ним спусковой элемент 10, удерживаемый посредством выступа 8 фиксатора, зацепленного с областью 26 зацепления (на этом чертеже частично не показана, чтобы был виден ведущий элемент 11, но ее можно увидеть на фиг. 57). Так как выступ 8 зацеплен с областью 26 зацепления, спусковой элемент 10 существенно в проход Р, чтобы перекрыть проход Р, не проходит. Палец Р1 может войти в проход Р гнезда R1, контактируя или не контактируя с пусковой областью 25.
Когда палец Р1 проходит через проход Р, чтобы войти в гнездо, палец Р1 контактирует с фиксатором 6, таким образом, вращая фиксатор 6 вокруг вала 17 фиксатора. Фиксатор 6 смещен назад в свое смещенное положение, поскольку палец Р1 прошел в достаточной мере. Спусковой элемент 10 не смещен назад в свое смещенное положение до тех пор, пока пользователь не вызовет сброс гидравлического давления в гидравлическом цилиндре 9, чтобы пружина 31 возврата ведущего элемента смогла оттянуть ведущий элемент 11 в его втянутое положение, как показано на фиг. 64-66. Когда ведущий элемент 11 возвращается в свое втянутое положение, спусковой элемент 10 может вращаться вокруг своей оси 21 спускового элемента в свое смещенное положение, так как область 26 отсоединения уже больше не удерживается выступом 8 фиксатора (фиг. 65 и 66). Ведущий элемент может быть смещен посредством пружины 34 возврата ведущего элемента. Это может действовать на спусковой элемент и/или ведущий элемент, чтобы помочь вызвать вращение спускового элемента/ведущего элемента по часовой стрелке (в той ориентации, которая показана на чертежах). Пока ведущий элемент 11 выдвинут, область 26 отсоединения спускового элемента 10 и выступ 8 фиксатора зацеплены друг с другом.
Фиксатор 6 показан на фиг. 60 у одного из своих пределов полного вращения посредством пальца Р1 максимально возможного размера. Пальцы меньшего размера не вращают фиксатор 6 в такой мере (но все же могут эффективно использоваться). Однако иллюстрация большого пальца Р1 показывает, что выступ 8 никогда не покидает ведущего элемента 11 и не проходит мимо направляющей поверхности 28 и, таким образом, ведущий элемент 11 не зацепляется в области 19 соединения с выступом 8, пока ведущий элемент 11 выдвинут.
На фиг. 67-83 показан вход пальца в фиксирующее устройство 1. На фиг. 67 в рабочем режиме показан палец Р1, захваченный в гнезде. Ведущий элемент 11 втянут, спусковой элемент 10 смещен вниз, фиксатор 6 смещен вниз, чтобы заблокировать палец Р1 в гнезде R1, а область 25 отсоединения проходит в проход Р. На фиг. 68 показан ведущий элемент 11, начинающий выдвигаться благодаря тому, что в гидравлический цилиндр 9 подается гидравлическое давление. На фиг. 68 и 69 показана область соединения 19 ведущего элемента 11, начинающая зацепляться с фиксатором 6. На фиг. 69 и 70 показан фиксатор 6, вращающийся вокруг своего вала 17 фиксатора до тех пор, пока фиксатор 6 не дойдет до своего предела вращения (см. фиг. 73), и поэтому он не перекрывает проход Р для предотвращения извлечения пальца. На этом этапе оператор/пользователь может вызвать перемещение фиксирующего устройства 1, так что палец Р1 может выйти из гнезда R1 через проход Р.
На фиг. 74 показан палец Р1, начинающий сталкиваться с областью 25 отсоединения ведущего элемента 10. В результате этого ведущий элемент поднимается и выходит из контакта в рабочем положении с выступом 8. На фиг. 76 показан выступ 8 фиксатора 6 в точке выхода из контакта с областью 19 соединения ведущего элемента 10. На фиг. 77 показан выступ 8 фиксатора 6, проходящий мимо области 19 соединения, чтобы фиксатор 6 мог начать вращение назад в свое положение фиксации, останавливаемое посредством ограничителя 33 вращения (показан на фиг. 72). На этом этапе палец Р1 все еще поднимает ведущий элемент 11 и спусковой элемент 10 вверх, чтобы полностью освободить фиксатор 6 от ведущего элемента 10. На фиг. 78 показан фиксатор 6 и связанный с ним выступ 8, полностью удаленный от ведущего элемента 10 и связанной с ним области 19 соединения.
На фиг. 79 в своих высших точках показаны фиксатор 6 и спусковой элемент 10, по существу полностью или значительно втянутые из гнезда R1. Из фиг. 80 видно, что фиксатор 6 начал возвращаться в свое смещенное положение в гнезде R1, так как палец выходит из гнезда R1. На фиг. 80 спусковой элемент 10 находится в своей высшей точке. На фиг. 81 спусковой элемент 10 начинает входить и возвращаться в гнездо R1. Фиг. 83 показывает этап, который можно видеть на фиг. 58.
Геометрия выступа 8 и ведущего элемента 11 в области 19 соединения должна быть такой, чтобы область 19 соединения могла соскальзывать с выступа 8, когда фиксатор 6 находится в такой степени своего вращения или близко к ней, которая по существу соответствует нахождению на расстоянии от гнезда R1. Если выступ 8 имеет форму со слишком большим поднутрением, выступ 8 может препятствовать перемещению спускового элемента вверх посредством пальца.
В многочисленных вариантах осуществления показан выступ 8, образующий одно целое или прикрепленный к фиксатору 6. Однако предусмотрено, что выступ 8 или другой соединительный элемент отделен или удален от фиксатора 6, например, прикреплен к вращающемуся валу фиксатора 6. Выступ 8 по-прежнему может составлять одно целое с фиксатором 6, поскольку фиксатор 6 также может быть выполнен за одно целое с его вращающимся валом.
Также важны положение и форма пусковой области 25 спускового элемента относительно рабочих областей фиксатора 6. Когда палец Р1 выходит из гнезда R1, как показано на фиг. 73-83, палец Р1 должен контактировать с пусковой областью 25 в направлении продвижения, обращенном к поверхности пальца Р1, а затем давать возможность фиксатору 6 вращаться обратно в гнездо R1, после того как палец Р1 достаточно продвинулся в направлении выхода из гнезда R1. Фиксатор 6 должен иметь такую форму и/или быть расположен так, чтобы он не контактировал с поверхностью пальца Р1, обращенной в направлении продвижения, таким образом, чтобы предотвратить дальнейшее продвижение пальца Р1 из гнезда R1. Когда палец Р1 выдвигается из гнезда R1, в идеале фиксатор 6 может контактировать с задней поверхностью пальца Р1, противоположной направлению перемещения пальца Р1.
В альтернативном варианте осуществления (не показан) область 19 соединения ведущего элемента 11 представляет собой элемент типа зубчатой рейки. Комплементарная зубчатая рейка, поверхность или зубчатое колесо, которые действуют так, чтобы достичь функции, аналогичной функции выступа 8, расположены на фиксаторе 6 или образуют с ним одно целое. Линейное перемещение ведущего элемента назад и вперед вызывает перемещение области соединения зубчатой рейки, чтобы приводить в движение рейку, когда она зацеплена с областью соединения на фиксаторе 6. Спусковой элемент по-прежнему может воздействовать на этот зубчатый линейный ведущий элемент для отсоединения и соединения зубчатого ведущего элемента с фиксатором 6. Недостатки зубчатой передачи заключаются в том, что зубья зубчатой передачи могут изнашиваться быстрее, чем односторонние зацепления, или ее функции могут мешать продукты износа.
В альтернативном варианте осуществления (не показан) область соединения ведущего элемента представляет собой зубчатую рейку или зубчатое зацепление, которое действует, чтобы получить функцию, аналогичную функции выступа, но приводится в действие ведущим элементом, приводимым во вращательное движение. То есть, ведущий элемент не имеет линейного действия, вместо этого он представляет собой зубчатое колесо, приводимое во вращательное движение и имеющее зубья, чтобы действовать в качестве области соединения для зацепления с аналогичными зубьями на фиксаторе 6. Спусковой элемент по-прежнему может воздействовать на этот зубчатый вращательный ведущий элемент для отсоединения и соединения зубчатого ведущего элемента с фиксатором 6. соединение и отсоединение может представлять собой отсоединение механической системы или отсоединение гидравлического/электрического привода. Зубчатый ведущий элемент может быть расположен на конце рычага, установленного с возможностью вращения, и при срабатывании рычаг поднимается, чтобы отсоединить зубчатый ведущий элемент от зубьев фиксатора 6. В альтернативных вариантах осуществления зубчатый ведущий элемент может иметь гидравлическое отсоединение, так что зубчатый ведущий элемент, когда он отсоединен, может свободно вращаться, чтобы фиксатор 6 мог сместиться назад в свое положение перекрытого прохода. В еще одном альтернативном исполнении этого альтернативного варианта осуществления ведущий элемент может быть смещен кручением, чтобы он вращался назад для вращения фиксатора 6 назад, в его положение перекрытия, вместо того чтобы поджимать кручением фиксатор. Альтернативно могут быть смещены кручением как ведущий элемент, так и фиксатор, так что оно смещены для вращения назад в свои начальные положения вращения. В этом варианте осуществления ведущий элемент может представлять собой не полное зубчатое колесо, а сектор/периферию зубьев между хордой, которые вращаются вокруг общей оси поворота.
Однако в других вариантах осуществления, некоторые из которых показаны на чертежах и описаны в настоящем документе, область 19 соединения и выступ 8 не являются зубчатым сопряжением. Область 19 соединения и выступ 8 имеют проскальзывающее, скользящее, упорное и/или одностороннее зацепление. Это позволяет уменьшить износ, вероятность захвата продуктов износа и/или производственные допуски по сравнению с зубчатыми, более сложными или другими системами. Это можно утверждать и в отношении зацепления (где оно существует) фиксатора 6 или выступа 8 с направляющей поверхностью 8.
В альтернативном варианте осуществления (не показан) область 19 соединения представляет собой вал или ось, имеющую общую ось вращения с одним или больше фиксаторов 6. Ось приводится в движение напрямую или опосредованно посредством привода, такого как гидравлический или электрический двигатель. Вращение фиксаторов 6 для их перемещения из положения перекрытия в поднятое положение осуществляется посредством привода двигателя, чтобы привести в движение ось для вращения и приведения в движение фиксаторов 6. Чтобы сделать возможным отсоединение двигателя от фиксаторов 6, спусковой элемент должен привести в действие либо а) привод двигателя, то есть гидравлическое или электрическое отсоединение, чтобы двигатель мог свободно вращаться, для высвобождения фиксаторов 6 из их поднятых положений, либо b) механический спусковой элемент, который может расцепить двигатель от фиксаторов, чтобы фиксаторы 6 могли быть смещены назад в свои положения перекрытия.
В альтернативном варианте осуществления, как показано на фиг. 84, направляющая поверхность 28 теперь уже расположена ниже выступа 48. Направляющая поверхность 20 не взаимодействует с фиксатором 6 или выступом 8. Вместо этого пружинная защелка 50 может захватить ведущий элемент 11 и предотвратить его зацепление с выступом 8 фиксатора 6 после полного выдвигания ведущего элемента 10 и приведения в действие вверх для отсоединения. Благодаря этому фиксатор 6 может совершать вращательное движение назад, в свое положение перекрытия в проходе, без зацепления или контакта с ведущим элементом 11, пока он не вернется в свое первое положение. Ведущий элемент 10, приведенный в действие спусковым элементом 10, выдвигается над защелкой 51 пружинной защелки 50. Поскольку часть ведущего элемента 11, - в этом варианте осуществления выступ 48, - расположена над защелкой 51, ведущий элемент 10 не может быть смещен вниз, чтобы контактировать с фиксатором 6. Когда ведущий элемент 10 втягивается, выступ соскальзывает с защелки 51, чтобы ведущий элемент 11 мог посредством вращения сместиться назад в свое первоначальное положение. Благодаря пружине 52 пружинной защелки 50 защелка 51 может скользить на некоторое расстояние под направляющей поверхностью 28, когда ведущий элемент 11 приводится в движение вверх спусковым элементом 10. Поднятие ведущего элемента и последующее удержание его защелкой 51 делает возможным свободное вращение фиксатора без взаимодействия с ведущим элементом.
В варианте осуществления (не показан), альтернативном по отношению к варианту осуществления, показанному на фиг. 84, ведущий элемент 11 может направляться посредством траектории или паза. Когда ведущий элемент 11 выдвигается для приведения в движение фиксатора 6, чтобы переместить его в поднятое положение, ведущий элемент следует по первой траектории выдвигания. Когда ведущий элемент 11 приводится в движение вверх, ведущий элемент входит на обратную траекторию, а когда ведущий элемент 11 втягивается, ведущий элемент 11 следует по обратной траектории. Обратная траектория предотвращает взаимодействие между ведущим элементом 11 и фиксатором 6, когда фиксатор 6 возвращается в свое положение перекрытия. Таким образом, направляющая поверхность 28 не взаимодействует с фиксатором 6 или выступом 8. Вместо этого направляющая поверхность 28 является частью паза, зафиксированного относительно корпуса соединителя, и опорная поверхность 28 зацепляется с частью ведущего элемента 11.
Дополнительные преимущества в отношении гидравлики, предоставляемой в стандартной комплектации экскаватора, состоят в том, что стандартный четырехходовой двухпозиционный клапан, поставляемый с большинством экскаваторов, может использоваться в существующей системе без каких-либо модификаций. Гидравлическая система показана на фиг. 52, на которой схематично показан стандартный четырехходовой двухпозиционный клапан 41. Гидравлическая система 42 соединителя, поставляемая с соединителем С, показана с гидравлическим цилиндром 40 второго фиксатора 3 и гидравлическим цилиндром 9 первого фиксатора 6. Показаны линии RETRACT (ВТЯГИВАНИЕ) и EXTEND (ВЫДВИГАНИЕ), соответствующие гидравлической линии, которая при повышении давления приводит к втягиванию цилиндра 40, и гидравлической линии, которая при повышении давления соответственно приводит к выдвиганию цилиндра 40.
В современных машинах, чтобы экономить топливо, давление в гидравлической системе может падать, иногда быстро. Это может вызвать проблемы с втягиванием и выдвиганием гидравлического цилиндра 9, который опосредованно приводит в действие фиксатор 6. Это связано с тем, что если во время высвобождения переднего пальца Р1 давления не хватает, гидравлический цилиндр 9 может втягиваться, прежде чем он сможет полностью выдвинуться, чтобы полностью высвободить гнездо R1 посредством вращения фиксатора 6 из отверстия гнезда R1.
Добавление пилотного обратного клапана 44 повышает удобство использования системы с такими современными машинами. Добавление пилотного обратного клапана 44 не является обязательным для всех систем.
Пример гидравлического контура с пилотным обратным клапаном 44 для гидравлического цилиндра 9 показан на фиг. 53. Пилотный обратный клапан 44 предотвращает втягивание гидравлического цилиндра 9 или по меньшей мере снижает скорость или интенсивность втягивания во время процесса втягивания (высвобождения). Это может быть достигнуто благодаря тому, что гидравлический цилиндр 9 питается от линии ВТЯГИВАНИЕ с промежуточным пилотным обратным клапаном 44 для предотвращения возврата текучей среды из гидравлического цилиндра 9 в линию ВТЯГИВАНИЕ, если давление жидкости в линии ВТЯГИВАНИЕ падает.
Побочным эффектом обратного клапана 44 является то, что в этом случае гидравлический цилиндр 9 не может втягиваться. Это преодолевается благодаря наличию пилотной линии 47, проходящей от линии "высокого" давления ВЫДВИГАНИЕ к пилотному обратному клапану 44, чтобы открывать пилотный обратный клапан 44 во время работы контура ВЫДВИГАНИЕ. Когда высокое давление подается посредством контура ВЫДВИГАНИЕ, пилотный обратный клапан 44 открывается, чтобы жидкость могла течь в линию низкого давления (ВТЯГИВАНИЕ), назад в БАК. Гидравлический цилиндр 9 втягивается благодаря его смещению пружиной 31. Альтернативно пилотная линия 47 может питаться от других областей контура ВЫДВИГАНИЕ, таких как области, расположенные после пилотного клапана 45 и перед цилиндром 40, или вне цилиндра 40.
Гидравлический цилиндр 40 также может иметь соответствующий пилотный клапан 46 для предотвращения втягивания второго фиксатора 3 и гидравлического цилиндра 40, пока соединитель находится в заблокированном положении, и высокое давление из линии ВЫДВИГАНИЕ не поступает. Побочным эффектом обратного клапана 45 является то, что в этом случае гидравлический цилиндр 40 не может втягиваться. Чтобы преодолеть это, пилотный обратный клапан 45 имеет соответствующую пилотную линию 46 для открытия пилотного обратного клапана 45. Пилотная линия 46 питается от линии ВТЯГИВАНИЕ.
В то время как посредством линии ВЫДВИГАНИЕ подается давление, гидравлический цилиндр 40 выдвигается. Когда давление, поступающее из линии ВЫДВИГАНИЕ, сбрасывается или снижается, втягивание гидравлического цилиндра гидравлического цилиндра 40 предотвращается или ограничивается благодаря пилотному обратному клапану 44. Это желательно в качестве меры обеспечения безопасности, благодаря которой второй фиксатор 3 (прикрепленный к гидравлическому цилиндру 40) не втягивается (и не открывает проход Р), пока пользователь не подаст давление в линию ВТЯГИВАНИЕ.
Предусмотрено множество способов конфигурации гидравлического контура, так что он может использоваться вместе со стандартным четырехходовым двухпозиционным клапаном, при этом по-прежнему сохраняются вышеописанные преимущества.
В некоторых вариантах осуществления, когда оператор входит в определенный режим, из громкоговорителя 43 может излучаться звук. В предпочтительном варианте осуществления, как показано на фиг. 52, также имеется блокировочный выключатель 44. Когда оператор приводит в действие выключатель 44, может использоваться гидравлическая система соединителя. В предпочтительном варианте осуществления одновременно с приведением в действие выключателя 44 звучит зуммер 43. В этом предпочтительном варианте осуществления случайное высвобождение любого из пальцев Р1 и Р2 невозможна без приведения в действие выключателя 44, благодаря чему гидравлическая система может быть приведена в действие для высвобождения одного из фиксаторов 3 и 6.
Если в приведенном выше описании делается ссылка на элементы или целые, имеющие известные эквиваленты, то такие эквиваленты включаются, как если бы они были установлены индивидуально.
Хотя изобретение было описано в качестве примера и со ссылкой на конкретные варианты осуществления, понятно, что, не выходя за пределы объема или сущности изобретения, можно осуществить модификации и усовершенствования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШТЕПСЕЛЬНЫЙ СОЕДИНИТЕЛЬ | 1992 |
|
RU2056679C1 |
| УЗЕЛ ЗУБА ДЛЯ МАШИН ДЛЯ ЗЕМЛЯНЫХ РАБОТ | 2005 |
|
RU2379430C1 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 1992 |
|
RU2040837C1 |
| КОАКСИАЛЬНЫЙ СОЕДИНИТЕЛЬ | 1992 |
|
RU2044376C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СОЕДИНИТЕЛЬ С ИСПОЛЬЗОВАНИЕМ УПРУГОСТИ ВОЛОКНА И ЦЕНТРИРУЮЩЕЙ КАНАВКИ | 1996 |
|
RU2178193C2 |
| СШИВАТЕЛЬ ДЛЯ ЗАКРЕПЛЕНИЯ СОЕДИНИТЕЛЕЙ КОНВЕЙЕРНОЙ ЛЕНТЫ | 2017 |
|
RU2770144C2 |
| СОЕДИНИТЕЛЬ СМЕННОГО КОМПЛЕКТА ОДНОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2703066C2 |
| Электрический соединитель | 1988 |
|
SU1557608A1 |
| Электрический соединитель | 1991 |
|
SU1815707A1 |
| КОАКСИАЛЬНЫЙ СОЕДИНИТЕЛЬ | 1992 |
|
RU2044375C1 |
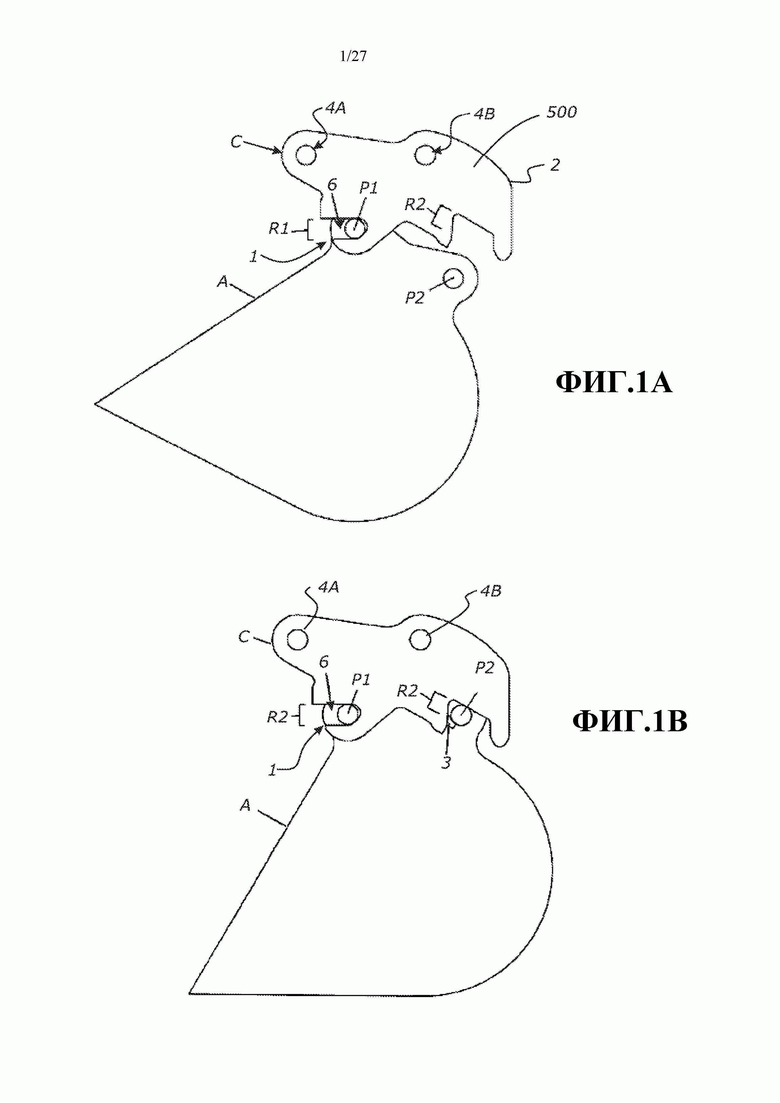
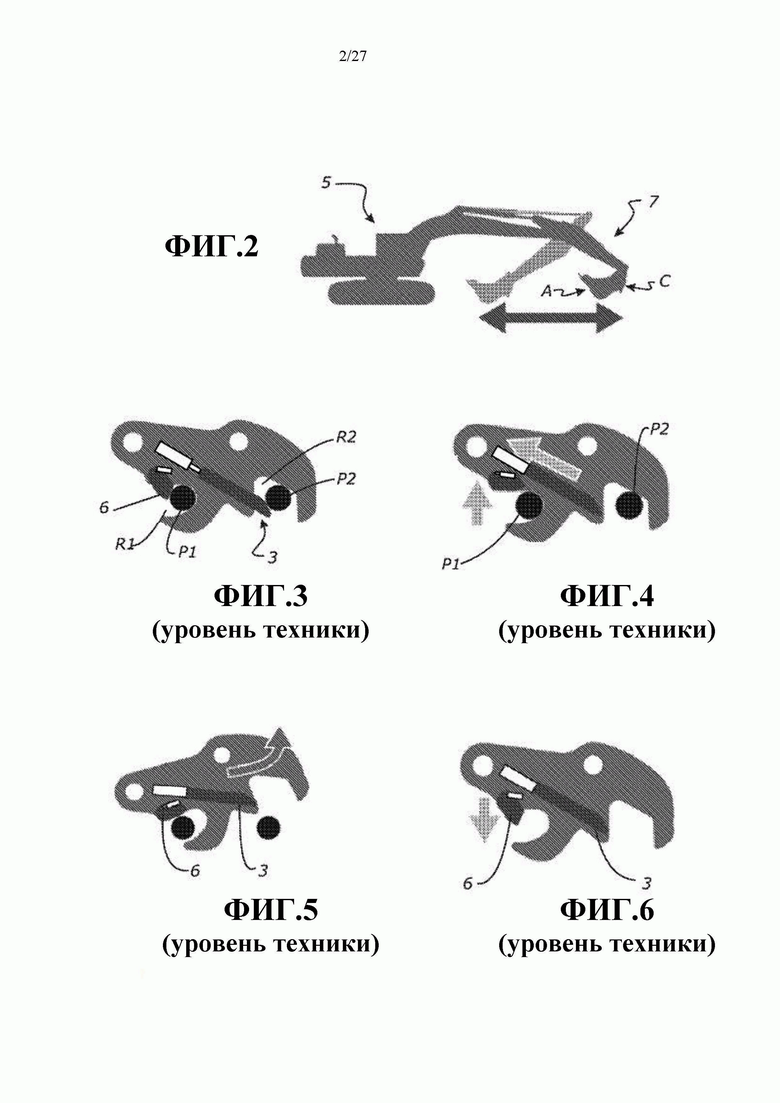
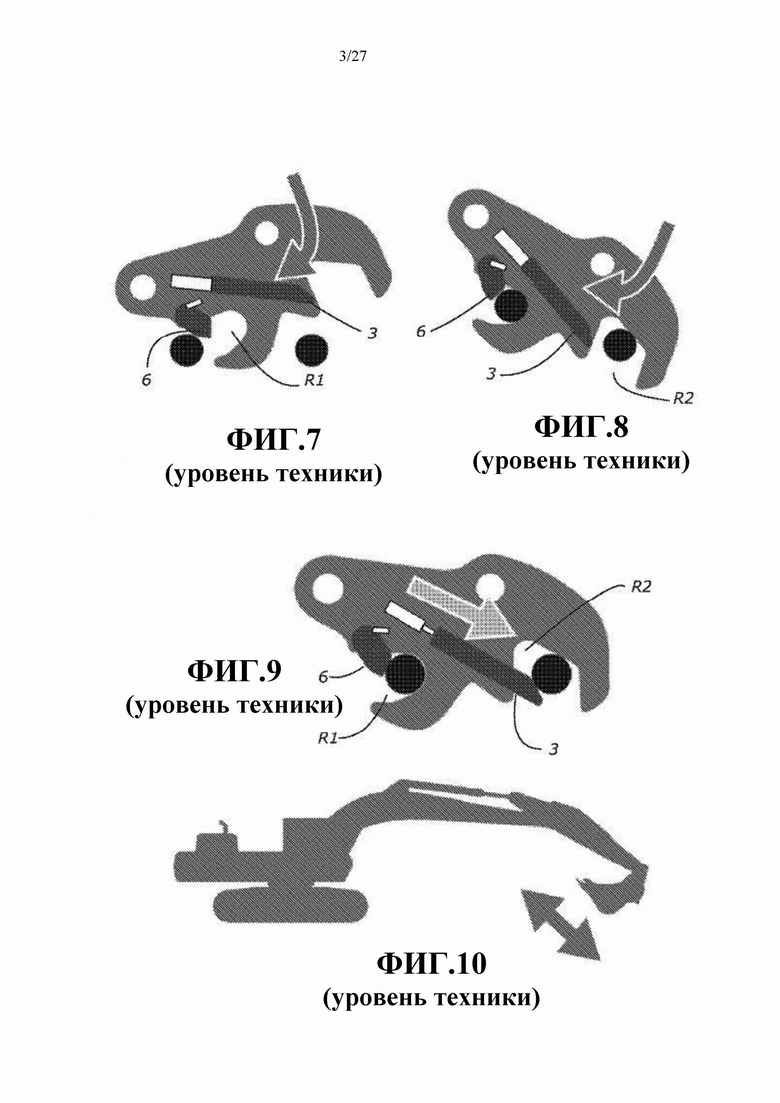
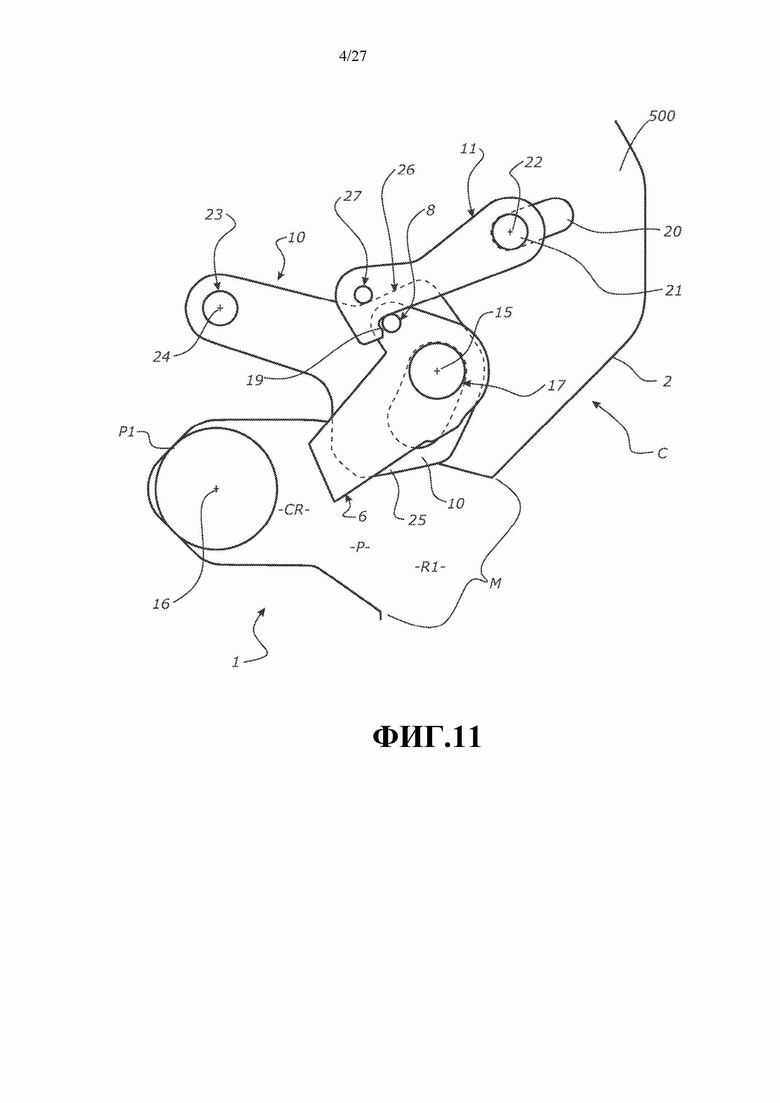
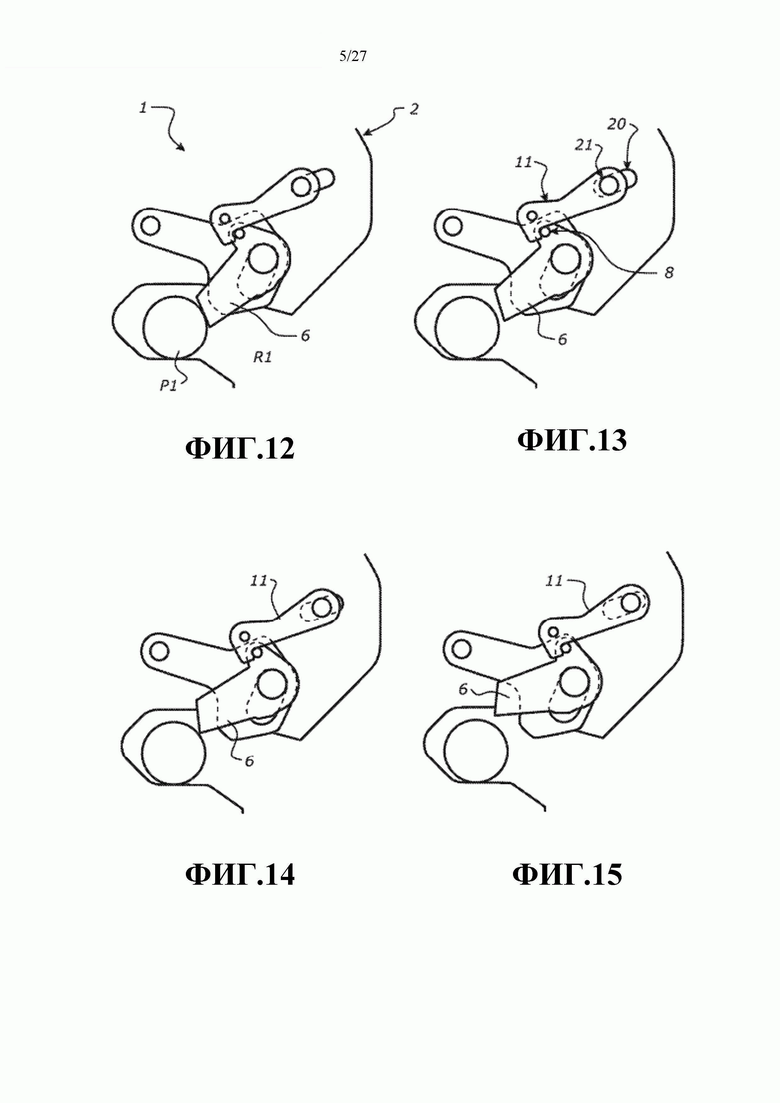
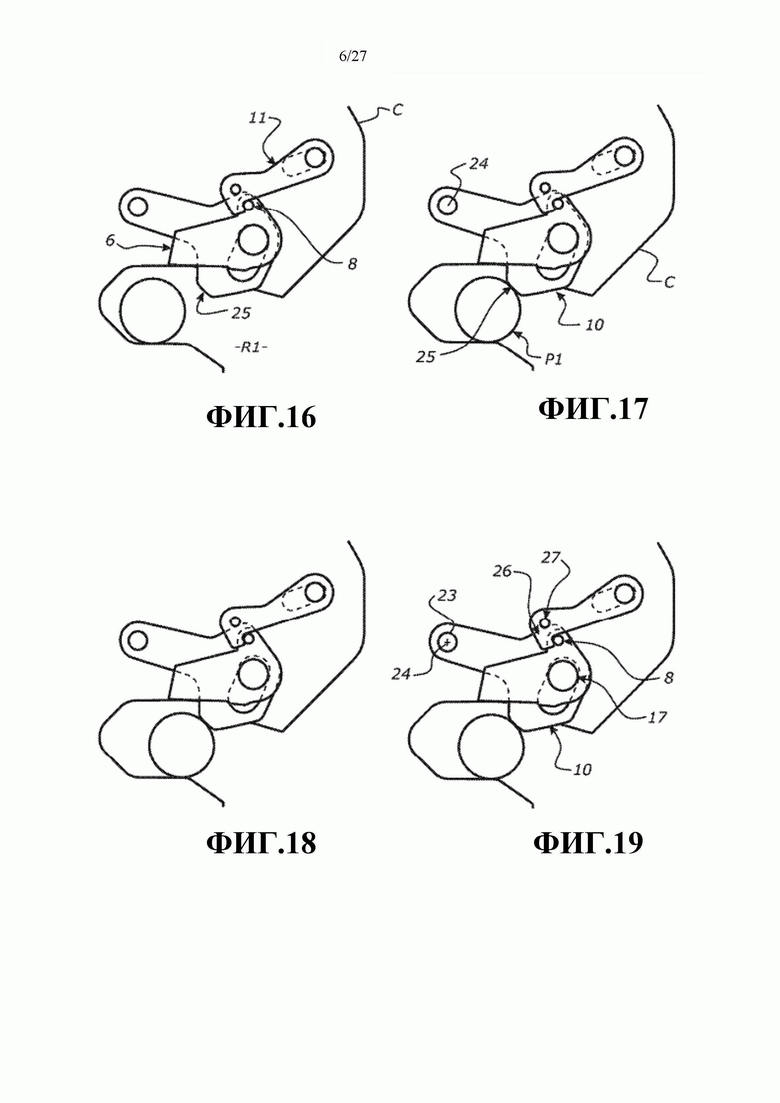
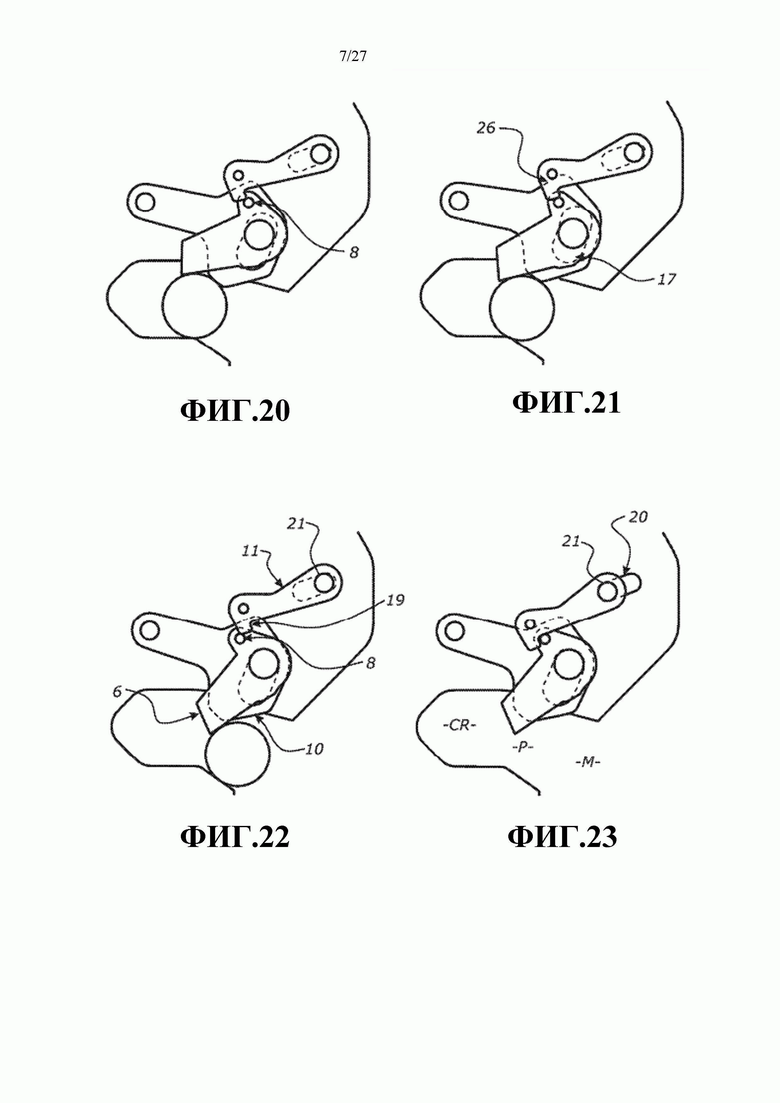
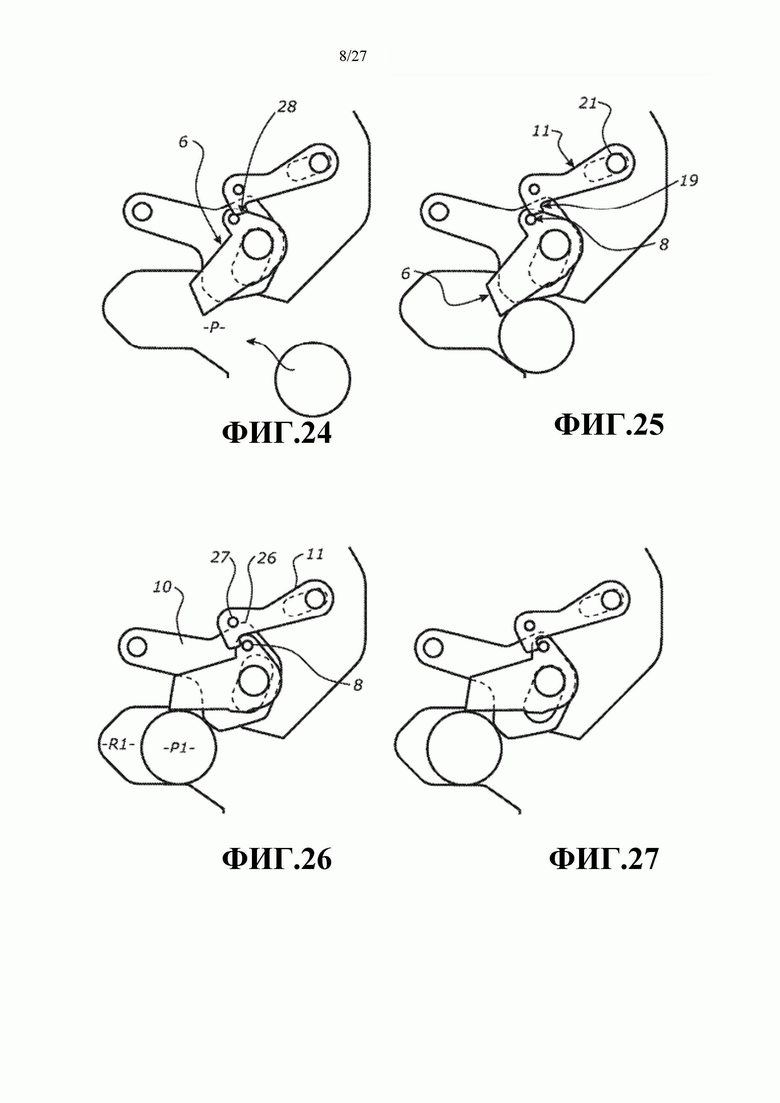
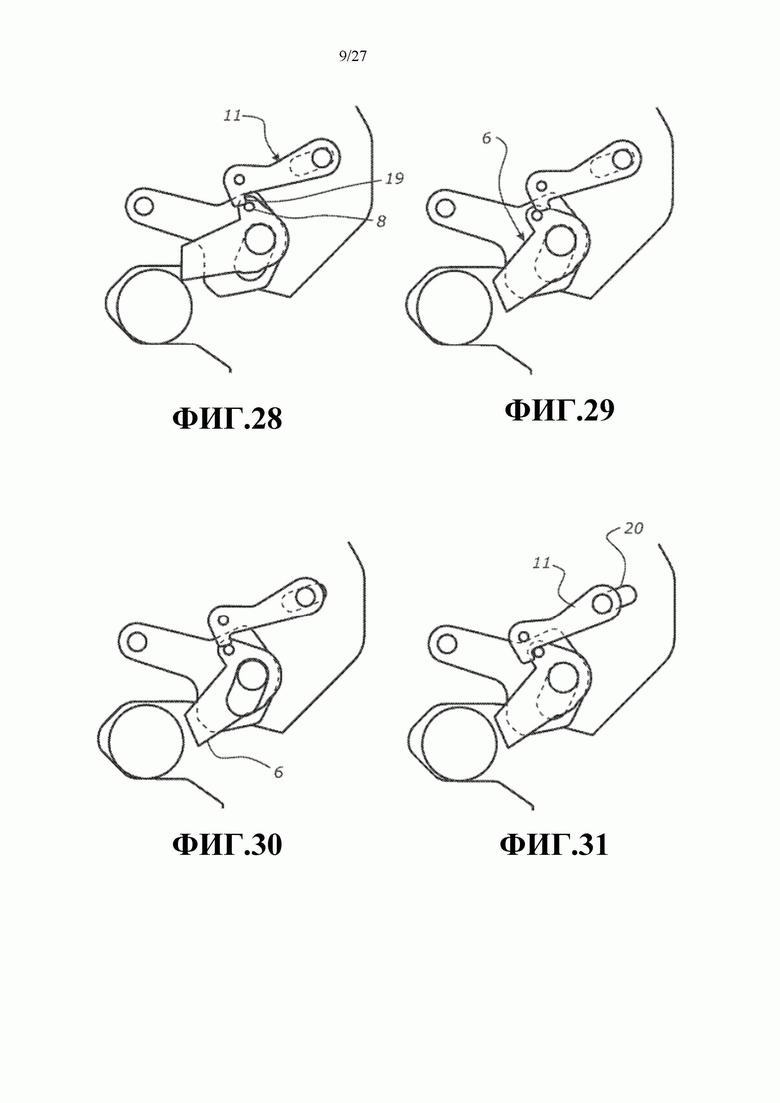
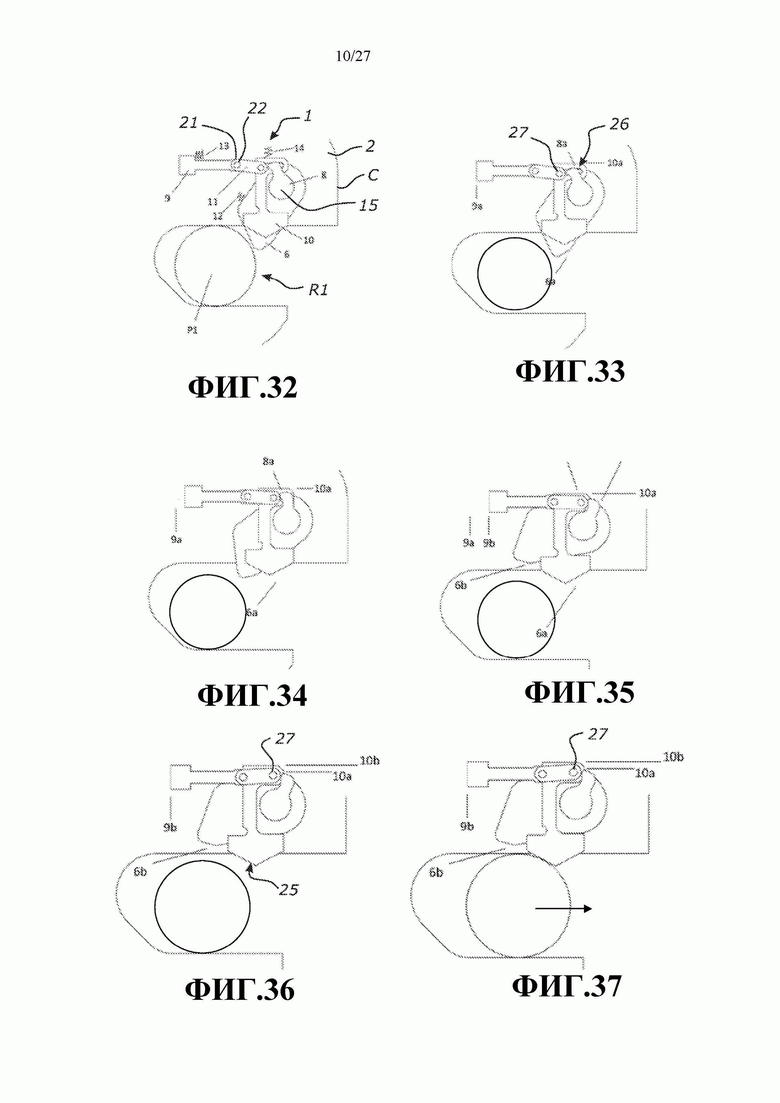
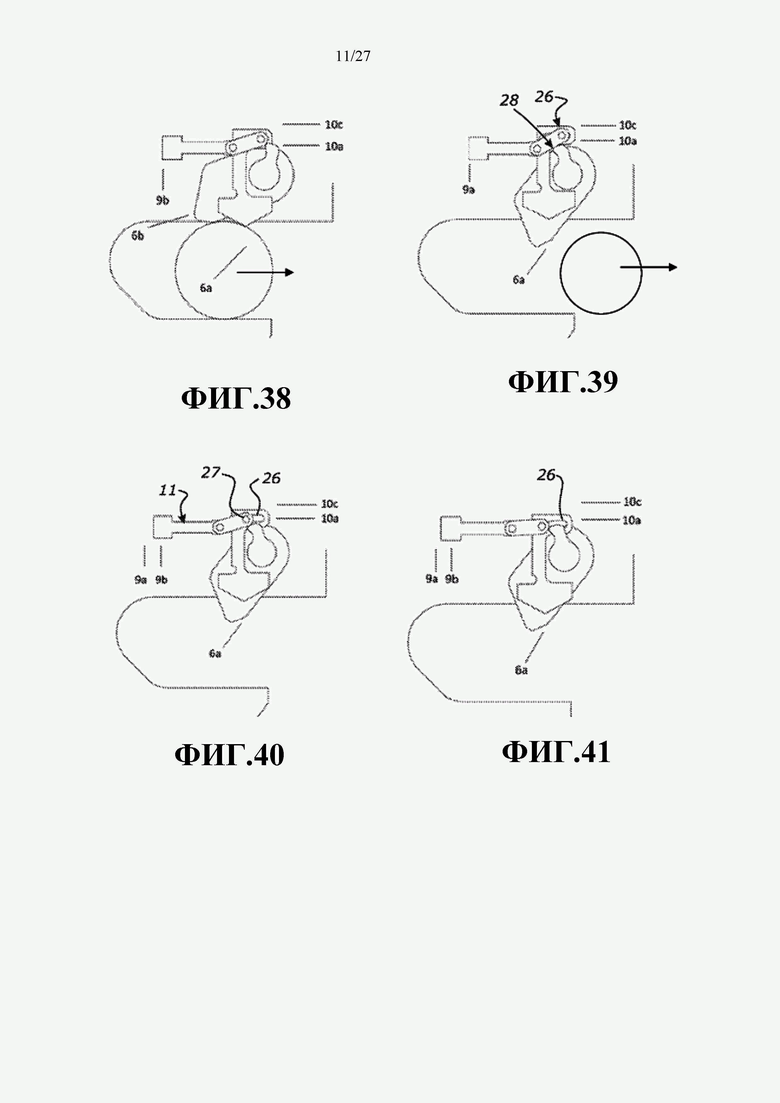
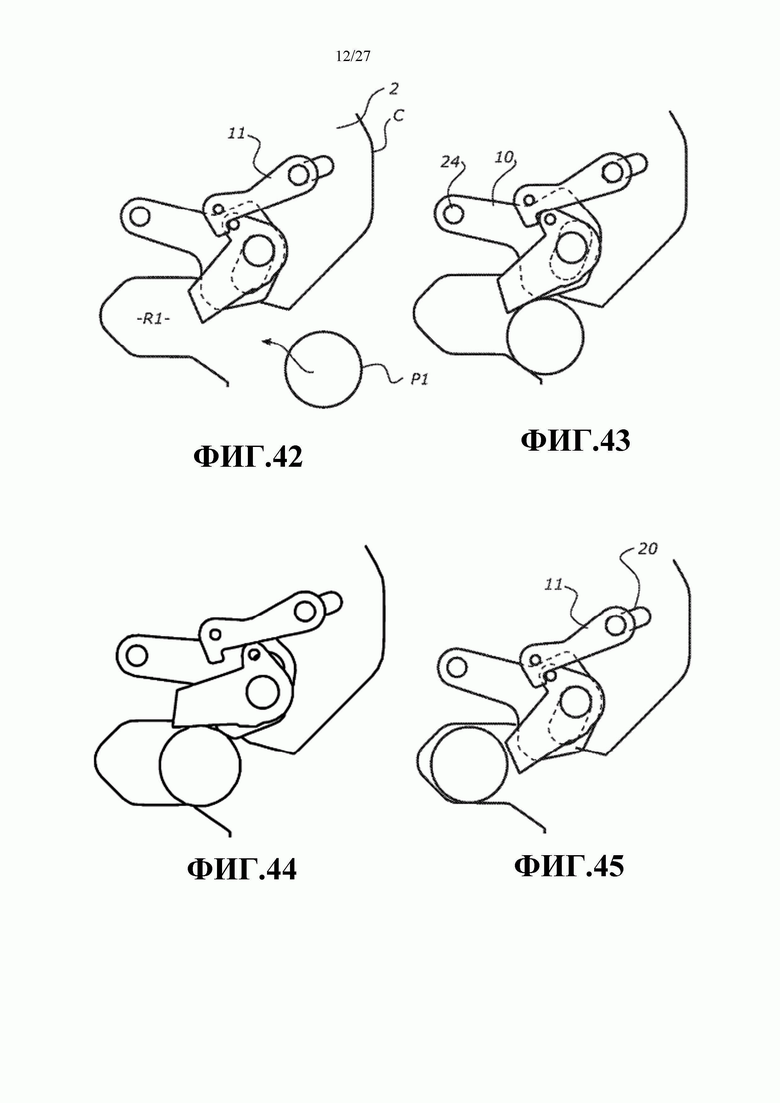
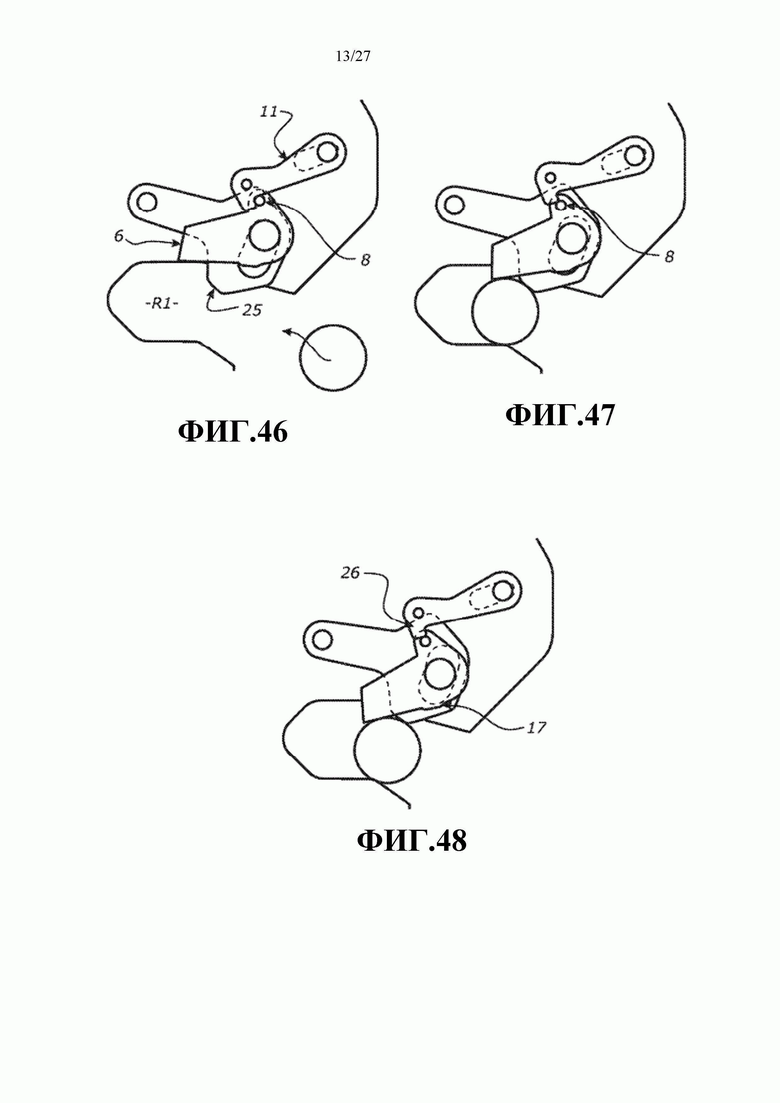
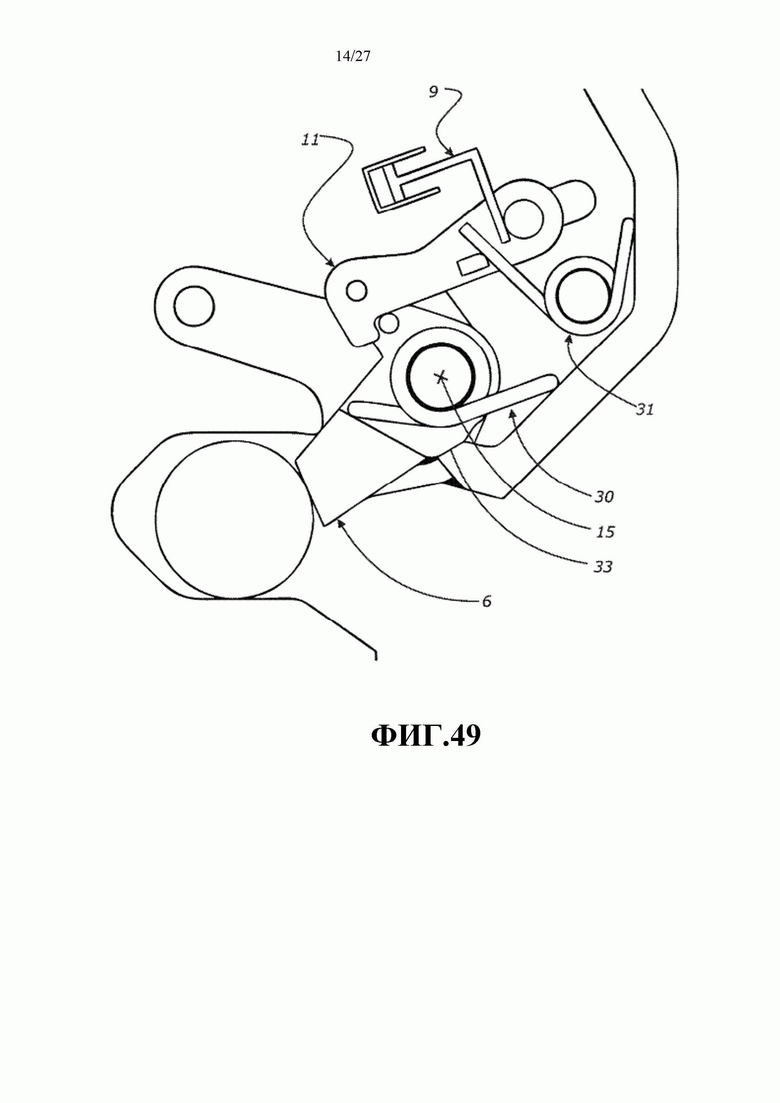
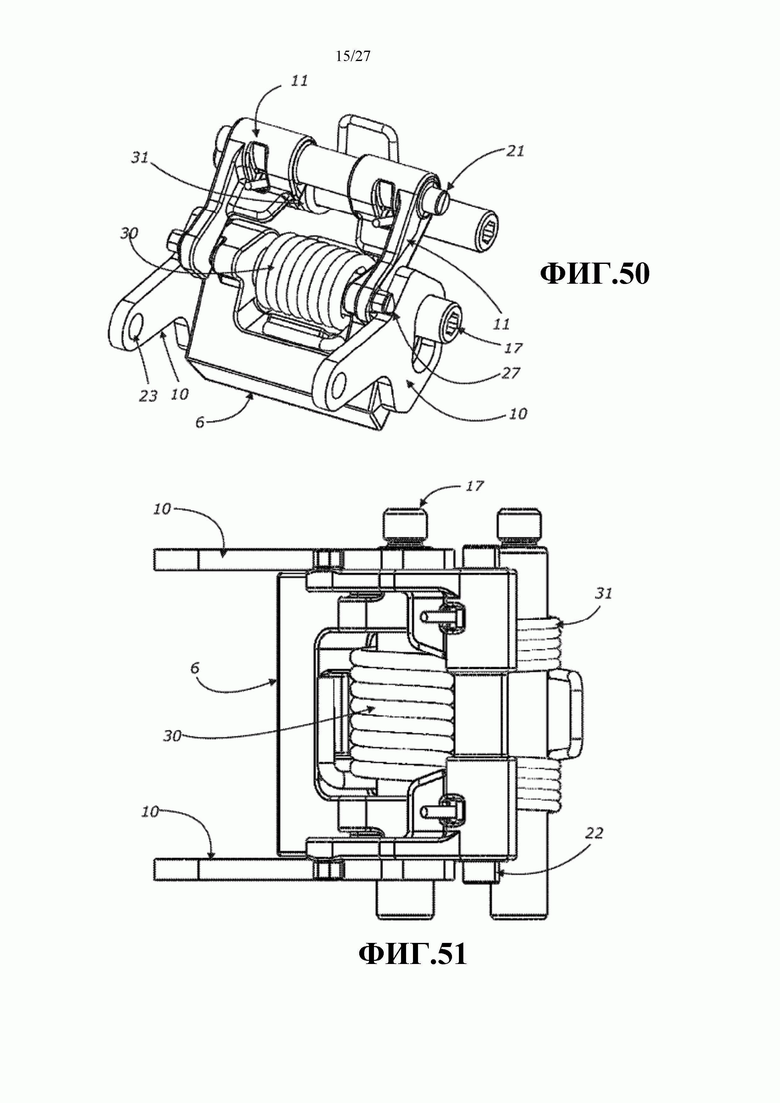
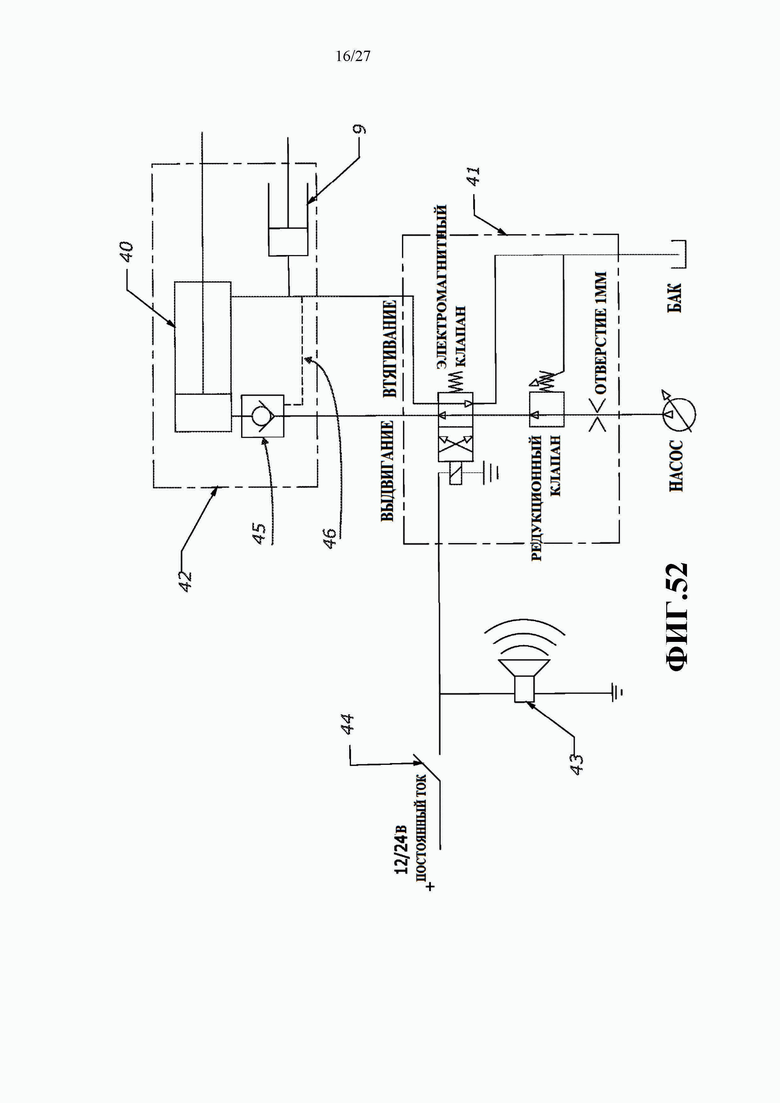
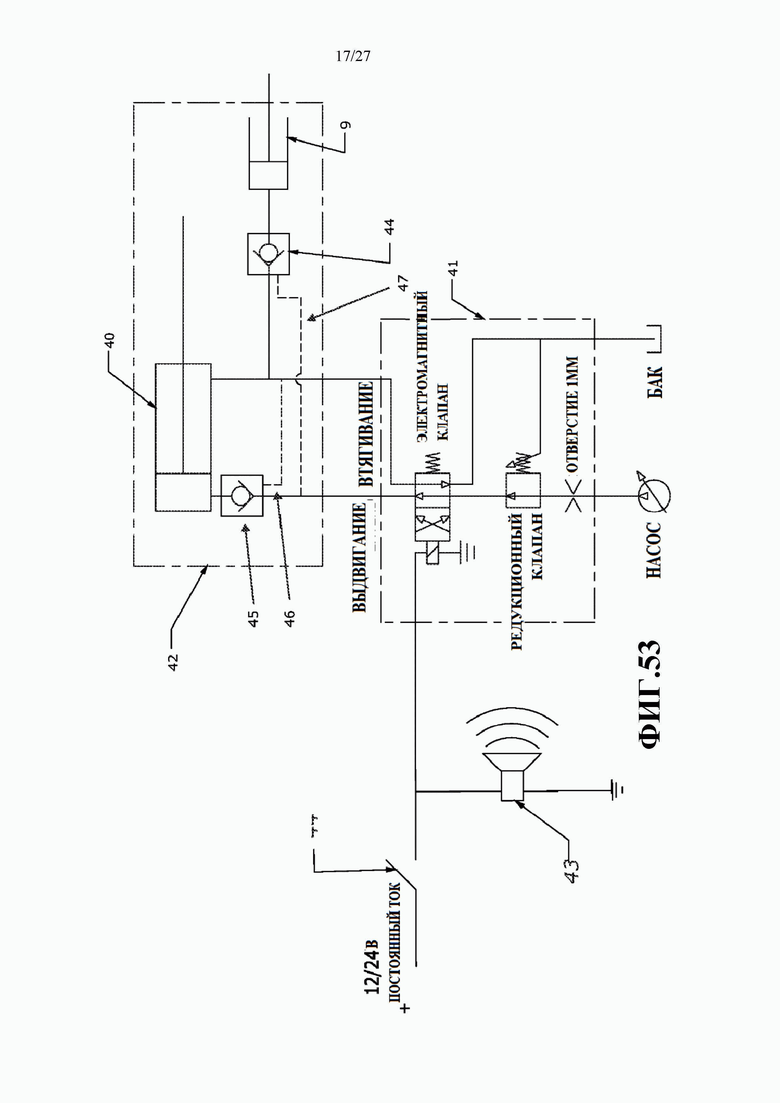
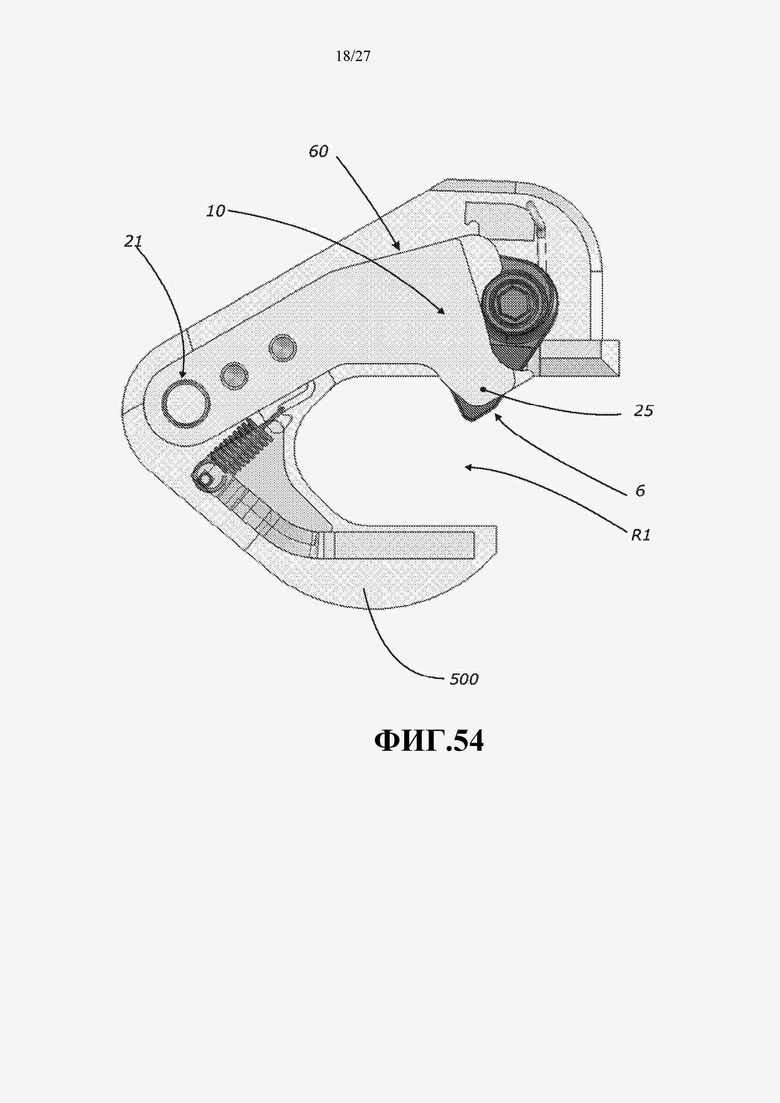
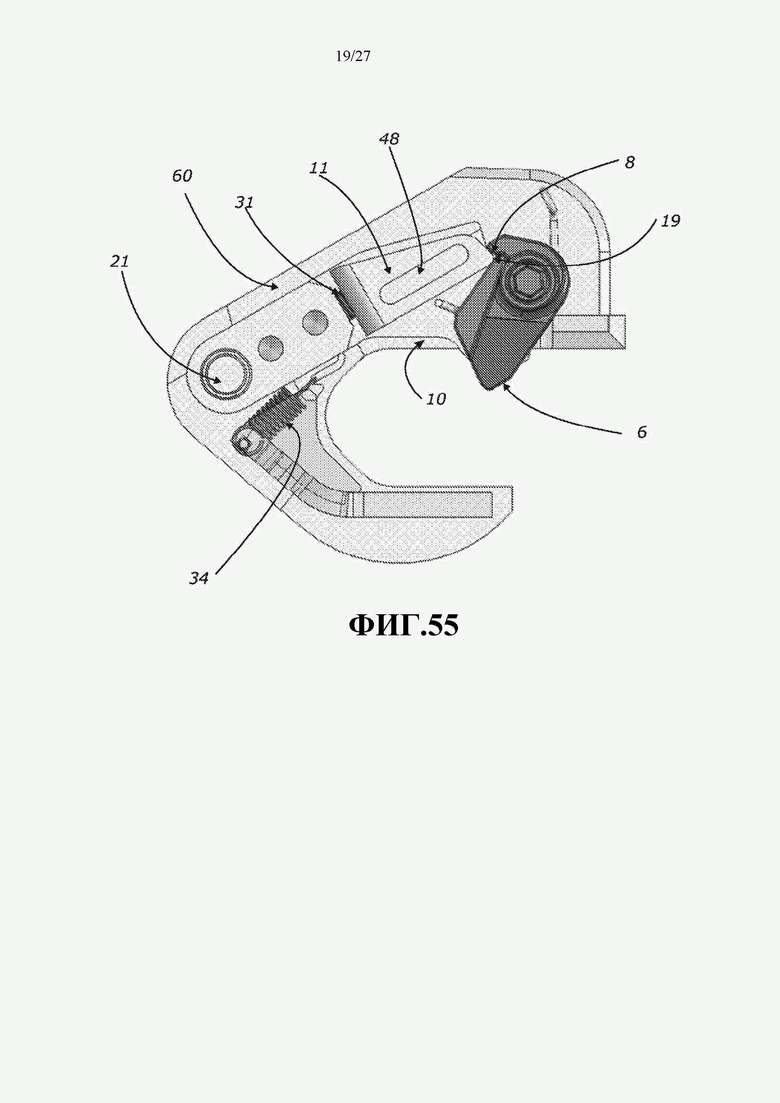
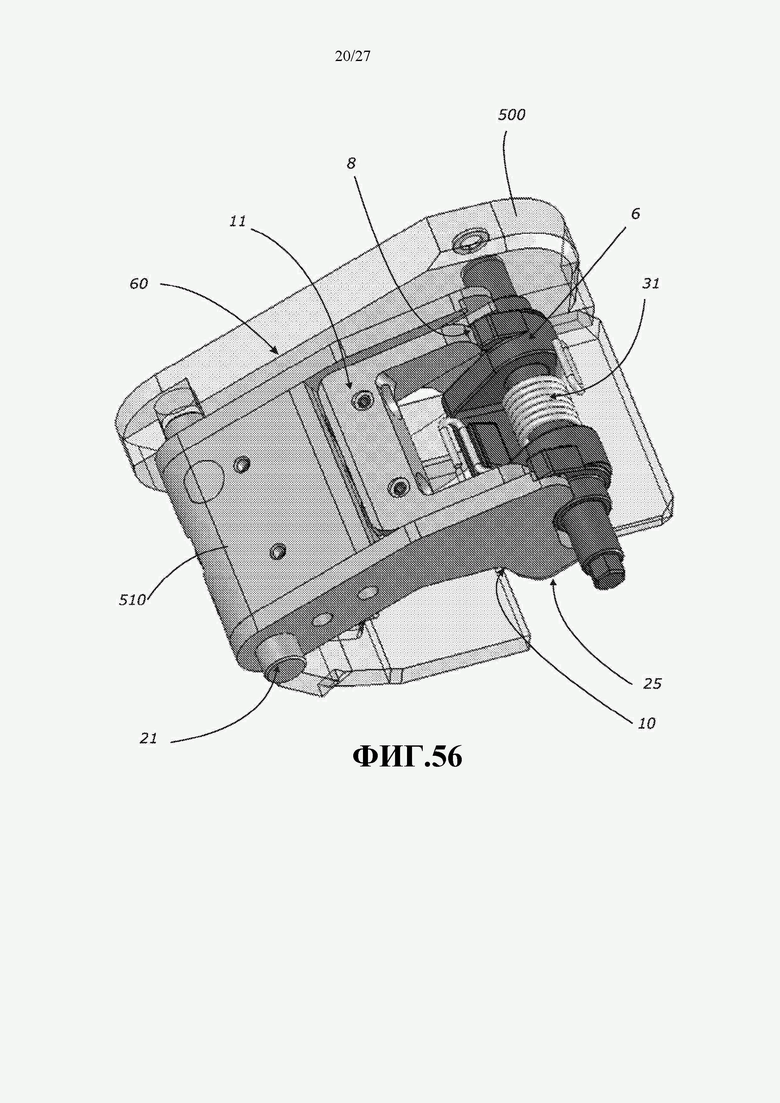
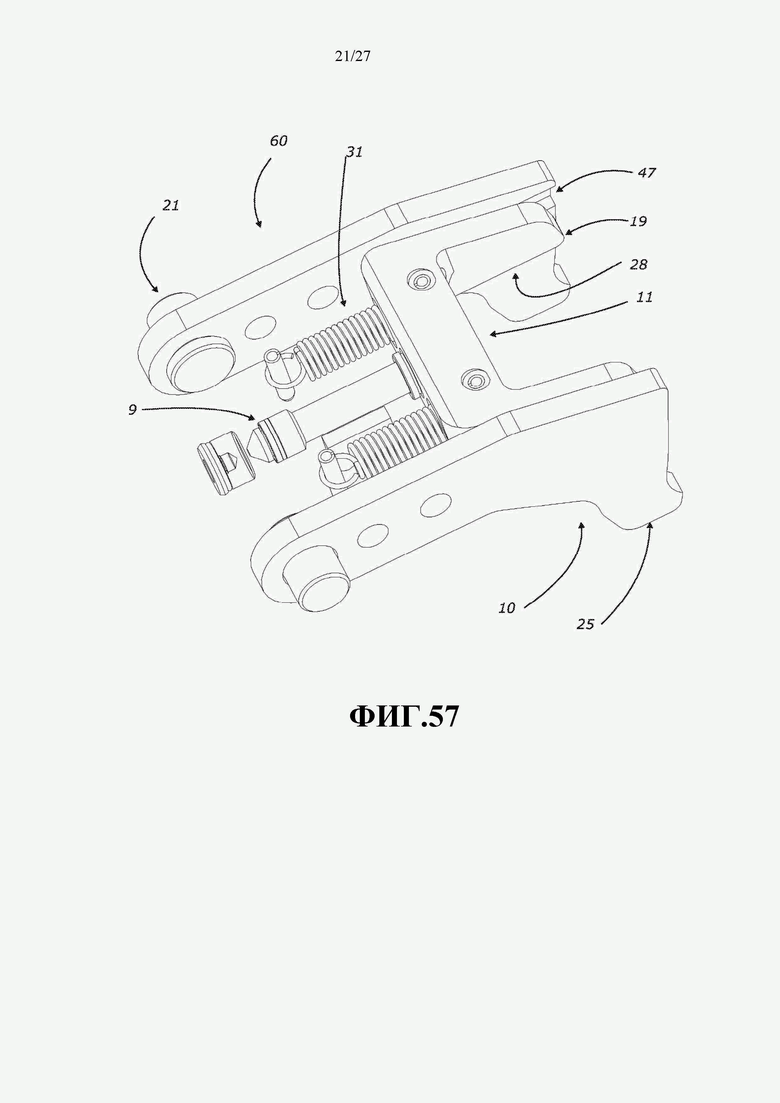
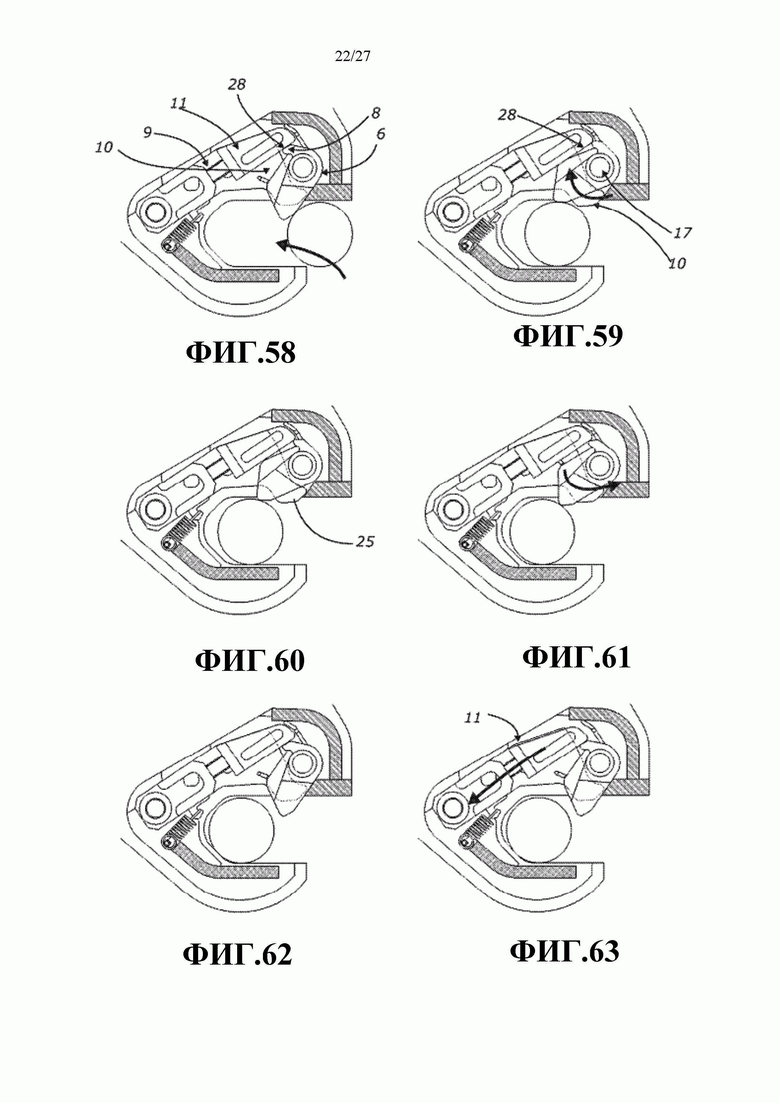
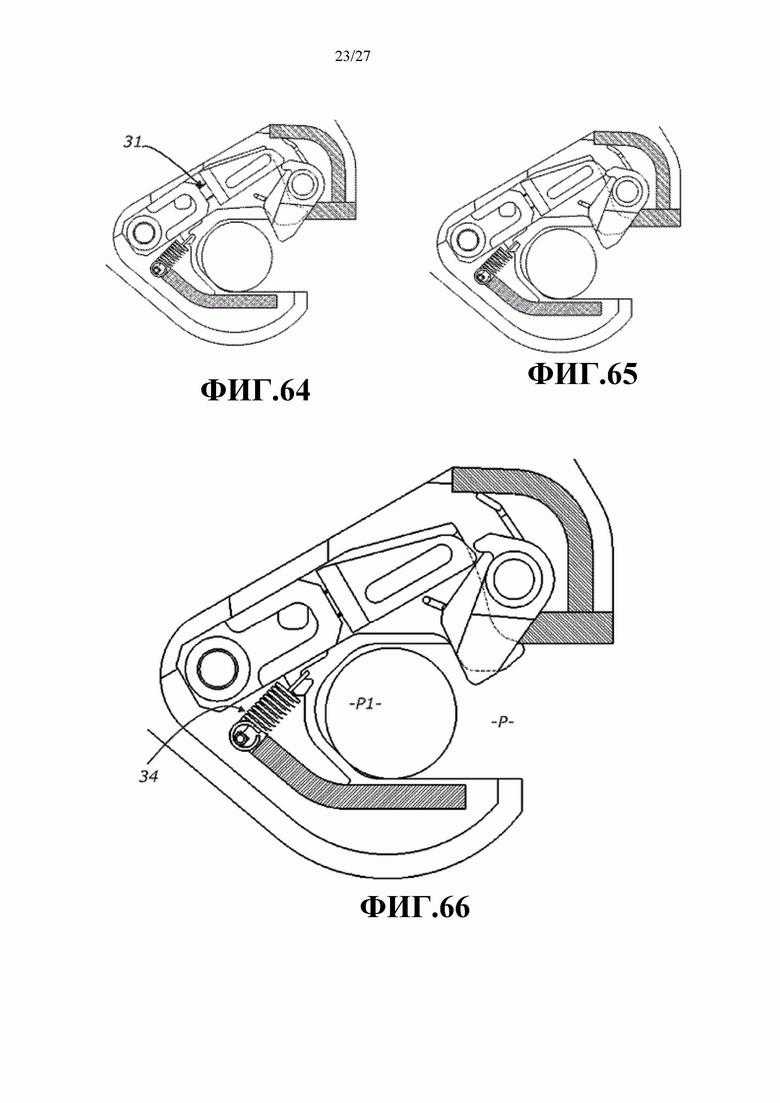
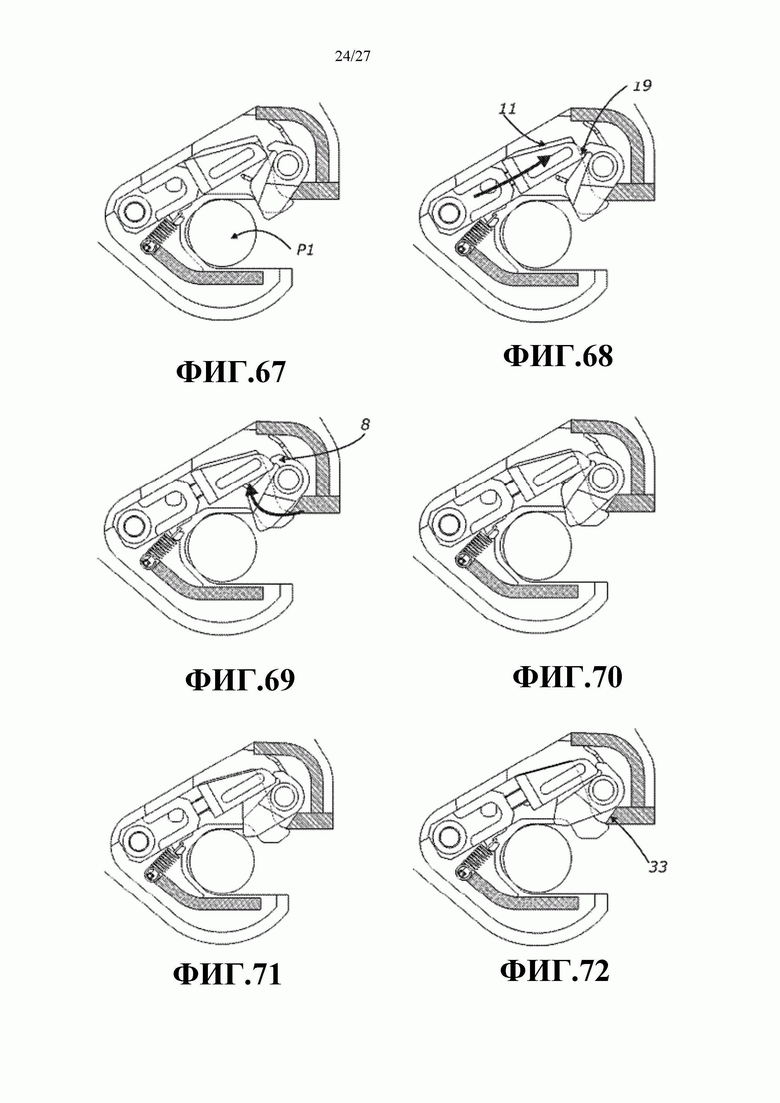
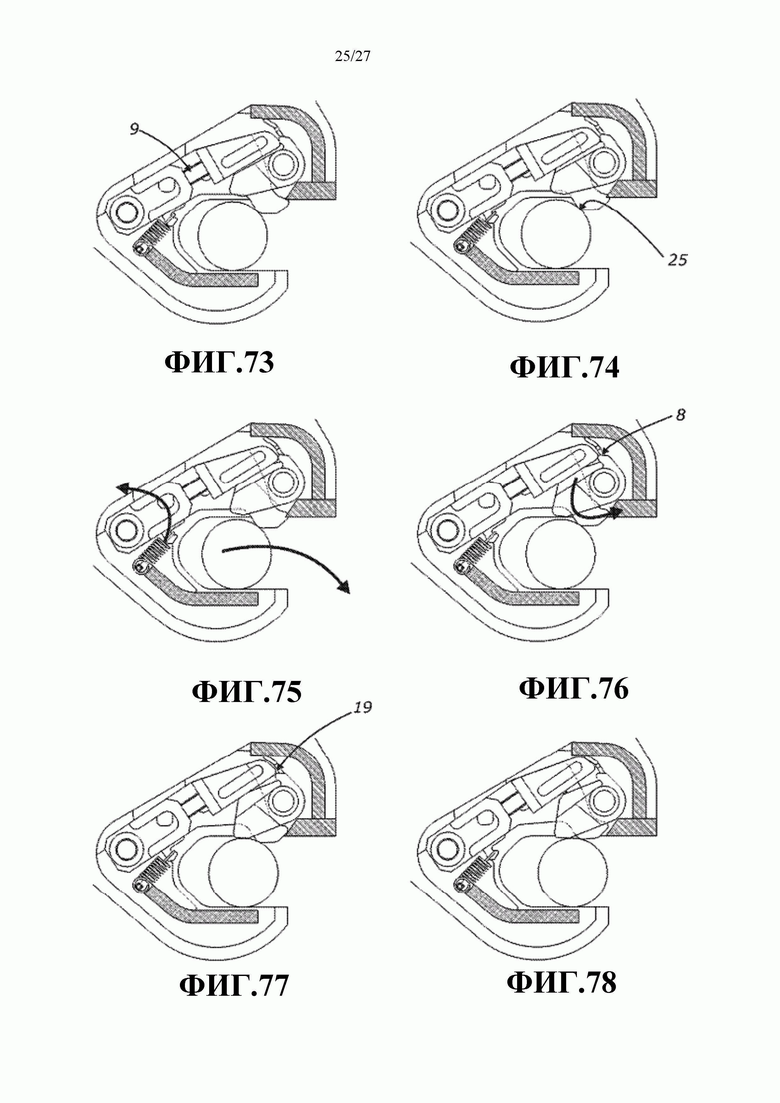
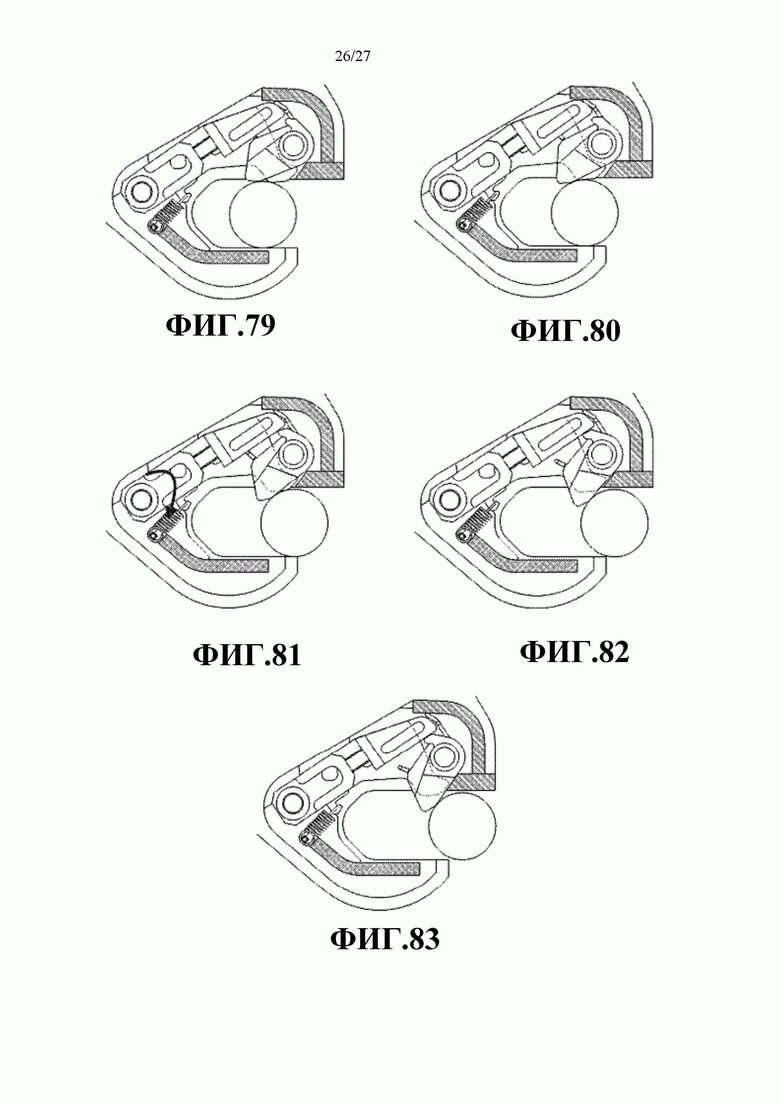
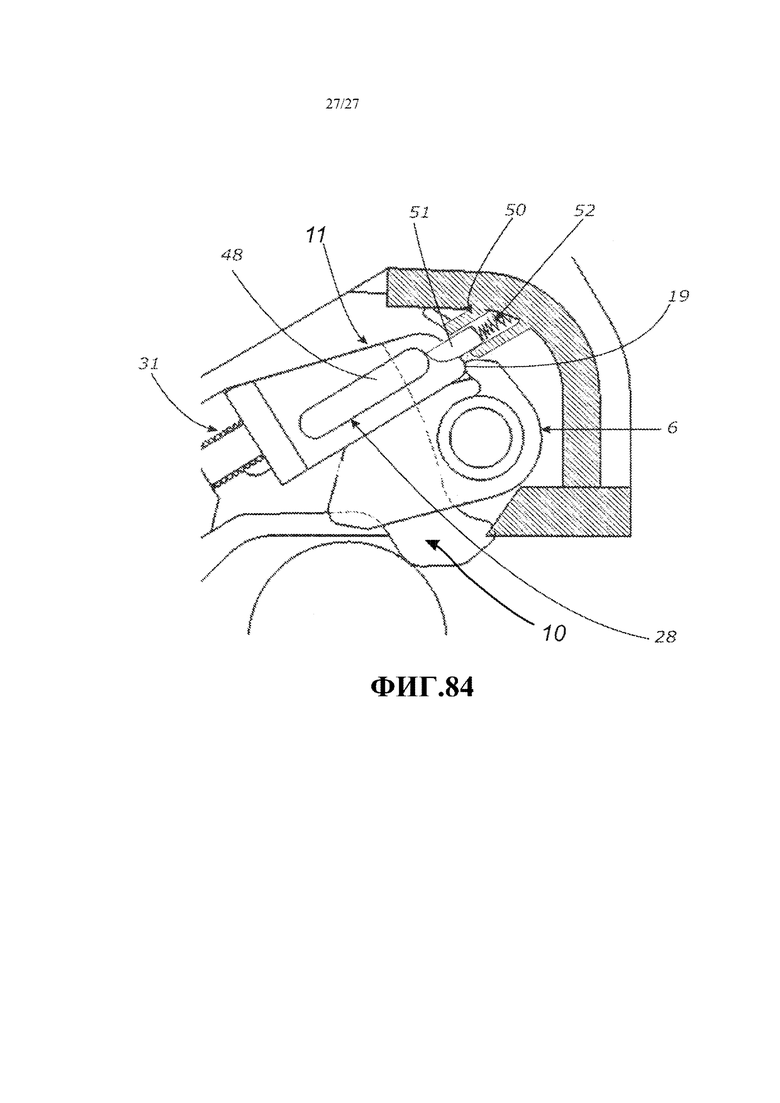
Группа изобретений относится к соединителю для крепления съемного оборудования к машине для земляных работ. Технический результат – безопасное удержание пальца навесного оборудования, защита от случайного смещения или частичного соединения навесного оборудования быстроразъемного соединения. Соединитель для крепления съемного оборудования к машине для земляных работ содержит корпус соединителя, имеющий гнездо, содержащее входное отверстие, выполненное с возможностью прохождения через него пальца съемного оборудования для перемещения через проход гнезда к области захвата гнезда, и фиксатор, выполненный с возможностью перемещения из корпуса соединителя и относительно него. При этом обеспечена возможность по меньшей мере частичного перекрытия прохода гнезда в степени, достаточной для предотвращения перемещения пальца из области захвата, посредством указанного фиксатора указанного соединителя. При этом фиксатор смещен в первое положение перекрытого прохода, в котором фиксатор предотвращает перемещение пальца из области захвата и способен перемещаться во второе положение относительно прохода, для обеспечения возможности: входа указанного пальца в область захвата посредством прижатия указанного пальца к фиксатору для перемещения фиксатора против его смещения по направлению к указанному второму положению и выхода указанного пальца из области захвата посредством ведущего элемента соединителя. При этом ведущий элемент выполнен с возможностью перемещения относительно корпуса соединителя для соединения с фиксатором для обеспечения возможности перемещения фиксатора ведущим элементом по меньшей мере частично к его второму положению и для отсоединения от фиксатора, с предотвращением тем самым перемещения ведущим элементом положением фиксатора. Причем соединитель дополнительно содержит спусковой элемент, выполненный с возможностью перемещения относительно корпуса соединителя так, что его может зацеплять и перемещать указанный палец при перемещении пальца через проход, так что спусковой элемент при его перемещении указанным пальцем обеспечивает отсоединение ведущего элемента от фиксатора. 6 н. и 36 з.п. ф-лы, 85 ил.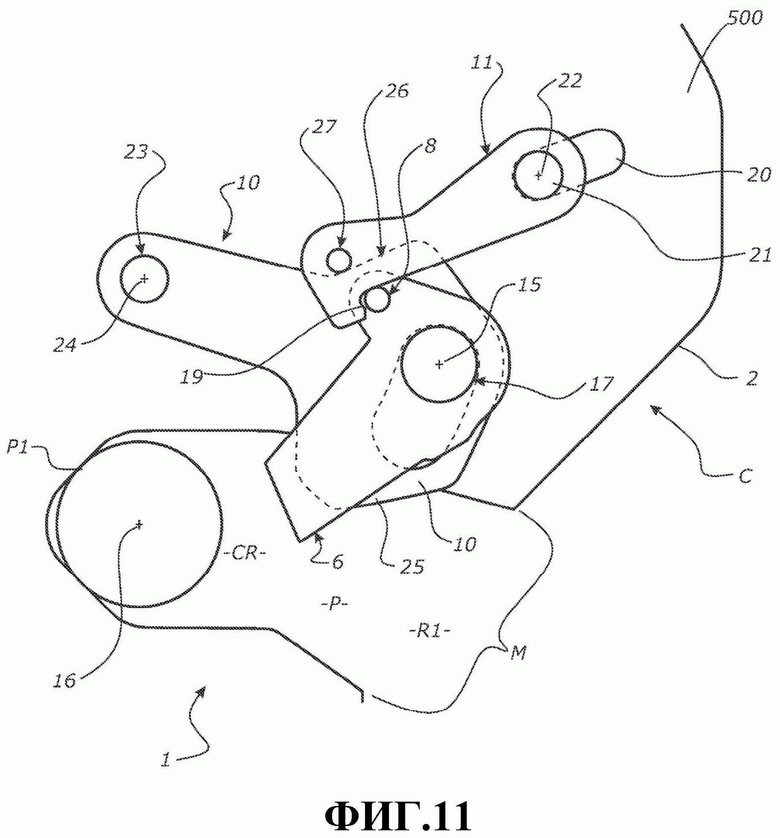
1. Соединитель для крепления съемного оборудования к машине для земляных работ, содержащий корпус соединителя, имеющий гнездо, содержащее входное отверстие, выполненное с возможностью прохождения через него пальца съемного оборудования для перемещения через проход гнезда к области захвата гнезда, и фиксатор, выполненный с возможностью перемещения из корпуса соединителя и относительно него, при этом обеспечена возможность по меньшей мере частичного перекрытия прохода гнезда в степени, достаточной для предотвращения перемещения пальца из области захвата, посредством указанного фиксатора указанного соединителя, при этом фиксатор смещен в первое положение перекрытого прохода, в котором фиксатор предотвращает перемещение пальца из области захвата и способен перемещаться во второе положение относительно прохода, для обеспечения возможности:
(i) входа указанного пальца в область захвата посредством прижатия указанного пальца к фиксатору для перемещения фиксатора против его смещения по направлению к указанному второму положению; и
(ii) выхода указанного пальца из области захвата посредством ведущего элемента соединителя, при этом ведущий элемент выполнен с возможностью перемещения относительно корпуса соединителя для (а) соединения с фиксатором для обеспечения возможности перемещения фиксатора ведущим элементом по меньшей мере частично к его второму положению и для (b) отсоединения от фиксатора, с предотвращением тем самым перемещения ведущим элементом положением фиксатора,
причем соединитель дополнительно содержит спусковой элемент, выполненный с возможностью перемещения относительно корпуса соединителя так, что его может зацеплять и перемещать указанный палец при перемещении пальца через проход, так что спусковой элемент при его перемещении указанным пальцем обеспечивает отсоединение ведущего элемента от фиксатора.
2. Соединитель по п. 1, в котором спусковой элемент выполнен с возможностью обеспечения отсоединения соединенных фиксатора и ведущего элемента, так что фиксатор, если он не находится в своем первом положении, под действием смещения способен перемещаться в свое первое положение.
3. Соединитель по п. 2, в котором спусковой элемент выполнен с возможностью обеспечения перемещения соединенных фиксатора и ведущего элемента относительно друг друга для отсоединения так, чтобы фиксатор не удерживался от перемещения в свое первое положение ведущим элементом.
4. Соединитель по п. 3, в котором ведущий элемент установлен относительно корпуса соединителя с возможностью вращательного движения для перемещения между своим соединенным и отсоединенным состоянием.
5. Соединитель по п. 4, в котором спусковой элемент установлен относительно корпуса соединителя с возможностью вращательного движения относительно корпуса соединителя.
6. Соединитель по п. 1, в котором ведущий элемент установлен с возможностью вращательного движения относительно корпуса соединителя для перемещения между соединенным и отсоединенным состоянием, и спусковой элемент установлен с возможностью вращательного движения относительно корпуса соединителя, причем ведущий элемент и спусковой элемент каждый выполнен с возможностью вращения относительно общей оси вращения.
7. Соединитель по п. 1, в котором корпус соединителя выполнен с возможностью прикрепления, или прикреплен, к машине для земляных работ.
8. Соединитель по п. 1, в котором ведущий элемент расположен у корпуса соединителя и выполнен с возможностью приведения в движение относительно корпуса соединителя с целью перемещения фиксатора в его второе положение, когда он соединен с указанным фиксатором.
9. Соединитель по п. 1, в котором фиксатор установлен относительно корпуса соединителя и выполнен с возможностью перемещения относительно корпуса соединителя посредством вращательного движения.
10. Соединитель по п. 1, в котором фиксатор выполнен с возможностью перемещения между его первым положением, в котором он выступает из корпуса соединителя по меньшей мере частично поперек гнезда в степени, достаточной для перекрытия прохода пальца из области захвата, и его вторым положением, в котором проход пальца из области захвата не перекрыт фиксатором.
11. Соединитель по п. 10, в котором фиксатор в своем первом положении проходит поперек гнезда в большей степени, чем в своем втором положении.
12. Соединитель по п. 11, в котором предотвращено перемещение фиксатора из второго положения, когда он находится в первом положении.
13. Соединитель по п. 12, в котором корпус соединителя содержит ограничитель для остановки перемещения фиксатора дальше его первого положения.
14. Соединитель по п. 13, в котором ограничитель содержит ограничительную поверхность, к которой в рабочем положении смещен фиксатор, когда он находится в своем первом положении.
15. Соединитель по п. 1, в котором фиксатор смещен посредством пружины.
16. Соединитель по п. 1, в котором ось фиксатора параллельна продольному направлению пальца, когда палец удерживается в указанном гнезде.
17. Соединитель по п. 1, в котором ведущий элемент и фиксатор или вал, посредством которого фиксатор установлен на корпусе соединителя, имеют взаимодействующие друг с другом поверхности соединения или элементы, действующие в качестве соединения, в рабочем положении зацепляемые друг с другом, когда указанный ведущий элемент находится в своем соединенном состоянии, и в рабочем положении отцепляемые, когда ведущий элемент находится в своем отсоединенном состоянии.
18. Соединитель по п. 17, в котором соединение содержит выступ фиксатора и поверхность соединения ведущего элемента, выполненную с возможностью соединения с выступом фиксатора для соединения фиксатора и ведущего элемента.
19. Соединитель по п. 1, в котором ведущий элемент напрямую или опосредованно установлен на корпусе соединителя с возможностью прямолинейного перемещения относительно корпуса соединителя.
20. Соединитель по п. 1, в котором ведущий элемент и спусковой элемент установлены на корпусе соединителя вместе, чтобы иметь возможность совместного вращательного перемещения относительно корпуса соединителя.
21. Соединитель по п. 20, в котором ведущий элемент выполнен с возможностью по меньшей мере одного из вращательного перемещения и прямолинейного перемещения относительно спускового элемента.
22. Соединитель по п. 1, в котором ведущий элемент соединен с приводом ведущего элемента так, чтобы вызывать перемещение ведущего элемента с возможностью перемещения фиксатора.
23. Соединитель по п. 22, в котором привод ведущего элемента и спусковой элемент установлены вместе и на корпусе соединителя, причем привод ведущего элемента выполнен с возможностью вызывать прямолинейное движение ведущего элемента относительно спускового элемента.
24. Соединитель по п. 23, в котором привод ведущего элемента представляет собой гидравлический привод и выполнен с возможностью при приведении в действие вызывать перемещение ведущего элемента, когда ведущий элемент соединен с фиксатором, в таком направлении, чтобы перемещать фиксатор в его второе положение или по направлению к его второму положению.
25. Соединитель по п. 24, в котором привод ведущего элемента, когда он не приведен в действие, обеспечивает возможность перемещения ведущего элемента, когда он соединен с фиксатором, в таком направлении, чтобы обеспечить возможность перемещения фиксатора по направлению к его первому положению.
26. Соединитель по п. 25, в котором смещение, действующее на фиксатор, является достаточно сильным, чтобы, когда привод ведущего элемента не приведен в действие, а ведущий элемент соединен с фиксатором, смещение перемещало фиксатор по направлению к его первому положению.
27. Соединитель по п. 1, в котором смещение напрямую или опосредованно действует на указанный ведущий элемент, чтобы вызвать перемещение ведущего элемента в положение, способное принять соединенное состояние.
28. Соединитель по п. 27, в котором указанное смещение обеспечено пружиной, напрямую или опосредованно действующей на ведущий элемент.
29. Соединитель по п. 28, в котором смещение вызывает вращение ведущего элемента относительно корпуса соединителя.
30. Соединитель по п. 1, в котором гнездо обеспечено корпусом соединителя.
31. Соединитель по любому из пп. 1-30, в котором предусмотрено второе гнездо, обеспеченное корпусом соединителя в месте, удаленном от упомянутого гнезда, причем второе гнездо выполнено с возможностью вмещения и фиксации второго пальца съемного оборудования.
32. Соединитель по п. 31, в котором предусмотрено указанное второе гнездо, которое выполнено с возможностью фиксации второго пальца съемного оборудования, когда указанное первое гнездо удерживает указанный палец, и/или второе гнездо выполнено с возможностью удержания второго пальца съемного оборудования, когда в указанном гнезде не имеется указанного пальца, при этом предусмотрен второй фиксатор, расположенный у корпуса соединителя с возможностью перемещения между первым положением, в котором он предотвращает перемещение из второго гнезда второго пальца, расположенного во втором гнезде, и вторым положением, в котором удерживаемый второй палец может быть высвобожден из второго гнезда.
33. Соединитель по п. 32, в котором второй фиксатор выполнен с возможностью приведения в движение посредством гидравлического привода.
34. Соединитель по п. 1, в котором ведущий элемент выполнен с возможностью вращения для соединения с фиксатором и отсоединения от него и приведения в поступательное движение для перемещения фиксатора между его первым положением и вторым положением, когда ведущий элемент соединен с фиксатором.
35. Соединитель по п. 1, в котором спусковой элемент смещен во вращательное положение относительно корпуса соединителя, в котором спусковой элемент предназначен для контакта с пальцем, когда палец перемещен в область захвата и/или из области захвата.
36. Соединитель по п. 35, в котором вращательное смещение спускового элемента обеспечивается посредством пружины.
37. Соединитель по п. 1, в котором, когда спусковой элемент вызывает отсоединение между ведущим элементом и фиксатором, фиксатор под действием силы смещения способен вращаться в свое первое положение без вращения ведущего элемента вместе с фиксатором.
38. Соединитель для соединения с возможностью высвобождения съемного оборудования, содержащего соединительный палец, с машиной для земляных работ, причем соединитель содержит
a. корпус соединителя, прикрепленный или выполненный с возможностью прикрепления к машине для земляных работ,
b. гнездо, обеспеченное корпусом соединителя, выполненное с возможностью вмещения указанного пальца,
c. фиксатор, обеспеченный корпусом соединителя с возможностью перемещения относительно корпуса соединителя так, чтобы в положении фиксации пальца фиксатора относительно корпуса соединителя удерживать палец в гнезде, причем фиксатор выполнен с возможностью соединения с ведущим элементом и отсоединения от ведущего элемента, который, будучи соединенным с фиксатором, способен перемещать фиксатор из положения фиксации пальца в положение относительно корпуса соединителя, в котором палец не удерживается фиксатором и обеспечен возможностью выхода из гнезда,
d. спусковой элемент, с которым обеспечена возможность контакта указанного пальца, когда палец перемещается относительно корпуса соединителя для входа в гнездо и выхода из него для обеспечения отсоединения фиксатора и ведущего элемента.
39. Машина для земляных работ, которая содержит шасси и стрелу, поддерживаемую шасси, причем на конце стрелы поддерживается соединитель по п. 1 или 38.
40. Соединитель для соединения с возможностью высвобождения съемного оборудования, содержащего соединительный палец, с машиной для земляных работ, причем соединитель содержит:
a. корпус соединителя,
b. гнездо, обеспеченное корпусом соединителя для вмещения указанного пальца через входное отверстие гнезда,
c. фиксатор, расположенный у корпуса соединителя с возможностью перемещения относительно гнезда между первым положением для удержания указанного пальца в гнезде и вторым положением для обеспечения возможности высвобождения указанного пальца из гнезда, причем фиксатор выполнен с возможностью перемещения против смещения, толкающего фиксатор по направлению к первому положению, во второе положение, или по направлению ко второму положению, посредством каждого из:
i. пальца, когда палец перемещается через входное отверстие в гнездо для обеспечения возможности перемещения пальца в гнездо для фиксации в нем посредством указанного фиксатора, и
ii. ведущего элемента, расположенного у корпуса соединителя с возможностью перемещения между соединенным и отсоединенным состоянием привода и выполненного с возможностью приведения в движение относительно корпуса соединителя для перемещения фиксатора в его второе положение, и
d. спусковой элемент, расположенный у корпуса соединителя и обеспеченный относительно гнезда так, что с ним обеспечена возможностью контакта указанного пальца, с возможностью его перемещения указанным пальцем относительно корпуса соединителя при перемещении указанного пальца по меньшей мере в одном, или в каждом, из (i) направления перемещения в гнездо, и (ii) направления движения из гнезда, для обеспечения перемещения соединенных фиксатора и ведущего элемента для их отсоединения, так что фиксатор способен, если он не находится в своем первом положении, перемещаться в свое первое положение посредством смещения.
41. Соединитель для крепления съемного оборудования, содержащего крепежный палец, к машине для земляных работ, причем соединитель содержит корпус соединителя, имеющий гнездо, имеющее область захвата для вмещения крепежного пальца, и фиксатор для захвата пальца в области захвата, когда он находится в положении фиксации относительно корпуса соединителя, причем фиксатор выполнен с возможностью перемещения относительно корпуса соединителя посредством приводимого в движение ведущего элемента в положение, в котором обеспечена возможность высвобождения пальца из области захвата, и спусковое устройство, обеспеченное указанным корпусом соединителя так, что палец ударяет о спусковое устройство, когда палец перемещается в область захвата или из области захвата, которое после этого перемещается для отсоединения ведущего элемента от фиксатора, с обеспечением возможности перемещения фиксатора назад в свое положение фиксации под действием смещения, действующего на фиксатор.
42. Соединитель для крепления съемного оборудования, содержащего крепежный палец, к машине для земляных работ, причем соединитель содержит корпус соединителя, имеющий гнездо, имеющее область захвата для вмещения крепежного пальца, и фиксатор для захвата пальца в области захвата, когда он находится в положении фиксации относительно корпуса соединителя, причем фиксатор выполнен с возможностью перемещения относительно корпуса соединителя посредством приводимого в движение ведущего элемента в положение, в котором обеспечена возможность высвобождения пальца из области захвата, и спусковое устройство, обеспеченное указанным корпусом соединителя так, что палец ударяет о спусковое устройство, когда палец перемещается в область захвата или из области захвата, которое после этого перемещается для отсоединения ведущего элемента от фиксатора, после чего фиксатор не ограничен ведущим элементом перемещаться назад, в свое положение фиксации.
| US 3531140 A1, 29.09.1970 | |||
| Устройство для автоматического регулирования температурного режима автомобильного двигателя | 1961 |
|
SU146194A1 |
| US 20100031539 A1, 11.02.2010 | |||
| US 20140301779 A1, 09.10.2014 | |||
| ТУРБОКОМПРЕССОР, РАБОТАЮЩИЙ НА ОТРАБОТАВШИХ ГАЗАХ, ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2450127C2 |
| DE 202013004797 U1, 02.10.2014 | |||
| WO 2014098616 A1, 26.06.2014. | |||

