Группа изобретений относится к области медицинской техники в сфере протезирования, а именно к устройствам управления электромеханическим протезом, и может быть использована в медицинской промышленности.
Известен оптомиографический датчик электромеханического протеза, который содержит инфракрасные оптические датчики, расположенные в продольных углублениях основания [WO 0245621 A2, дата публикации 13.06.2002 г., МПК: A61F 2/54; A61F 2/68; A61F 2/58].
Известен также оптомиографический датчик в составе системы для измерения мышечного состояния и гемодинамики, состоящий из ряда оптических датчиков, расположенных в определенной топологии для уточнения сигнала и улучшения соотношения сигнал-шум [US 2013184539 A1, дата публикации: 18.07.2013 г., МПК: А61В 5/00; А61В 5/04; А61В 5/0488].
Особенностью рассматриваемых систем является то, что они, в основном, основывают управление протеза на гемодинамическом состоянии мышечной ткани, для чего необходимо расположить датчики в непосредственной близи к целевой мышце.
В качестве прототипа выбран оптомиографический датчик электромеханического протеза и способ настройки электромеханического протеза, при этом датчик содержит корпус и оптические датчики, а способ заключается в закреплении электромеханического протеза культеприемником на конечности пользователя и калибровку оптомиографического датчика электромеханического протеза путем множественного выполнения этапов перемещения оптомиографического датчика внутри культеприемной гильзы протеза, регистрирования показателей мышечной активности конечности пользователя в каждом положении оптомиографического датчика внутри культеприемной гильзы протеза, выборе того положения оптомиографического датчика, при котором показатели мышечной активности конечности пользователя являются наиболее высокими или соответствуют заданным, и фиксировании оптомиографического датчика внутри культеприемной гильзы протеза в этом положении [CN 103610443 А, дата публикации 05.03.2020 г., МПК: A61F 2/58; A61F 2/68].
Недостатком прототипа и известных технических решений является высокая сложность настройки электромеханического протеза с использованием такого электромиографического датчика ввиду необходимости множественных итераций этапа перемещения оптомиографического датчика внутри культеприемной гильзы протеза и регистрирования показателей мышечной активности в каждом отдельном положении, что требует при этом также множественных снятий и установок всего протеза с конечности пользователя, что существенно увеличивает длительность процесса настройки электромеханического протеза и значительно его усложняет.
Техническая проблема, на решение которой направлена группа изобретений, заключается в упрощении способа настройки электромеханического протеза.
Технический результат, на достижение которого направлена группа изобретений, заключается в упрощении этапа калибровки оптомиографического датчика электромеханического протеза.
Сущность первого изобретения из группы изобретений заключается в следующем.
Оптомиографический датчик электромеханического протеза содержит корпус, имеющий поверхность для взаимодействия с конечностью пользователя, на которой расположены оптические датчики для получения данных о процессах, происходящих в подкожной структуре культи конечности пользователя. В отличие от прототипа оптомиографический датчик электромеханического протеза снабжен средством поочередной активации оптических датчиков, корпус содержит элемент настройки интенсивности излучения света, попадающий на приемник оптического датчика, расположенный с противоположной стороны корпуса от поверхности для взаимодействия с конечностью пользователя, а оптические датчики предназначены для получения данных об изменении кривизны мышечных волокон, или кровенаполнении мышечной ткани, или перемещении сухожилий, происходящих под кожей культи конечности пользователя.
Сущность второго изобретения из группы изобретений заключается в следующем.
Способ настройки электромеханического протеза включает закрепление электромеханического протеза культеприемником на конечности пользователя и калибровку оптомиографического датчика электромеханического протеза. В отличие от прототипа калибровку оптомиографического датчика электромеханического протеза производят путем поочередной активации оптических датчиков для получения данных об изменении кривизны мышечных волокон, или кровенаполнения мышечной ткани, или перемещения сухожилий, происходящих под кожей культи конечности пользователя, регистрацию оптического датчика, для которого был получен наиболее высокий показатель относительного изменения светопроницаемости.
Оптические датчики обеспечивают возможность получения на входе данных об изменении кривизны мышечных волокон, кровенаполнения мышечной ткани, перемещения сухожилий и других процессах, происходящих в подкожной структуре культи конечности пользователя, и преобразования этих данных в электрический сигнал на выходе датчика.
Оптические датчики содержат световые излучатели и фотоэлектрические приемники, обеспечивающие возможность взаимодействия с кожным покровом конечности пользователя. Световые излучатели обеспечивают возможность создания электромагнитного излучения видимого или инфракрасного диапазона. Фотоэлектрические приемники обеспечивают возможность преобразования света электромагнитного излучения видимого или инфракрасного диапазона, рассеянного в подкожной структуре культи конечности пользователя, в электрический сигнал. При этом для обеспечения питания оптических датчиков оптомиографический датчик может содержать интерфейс, подключенный к оптическим датчикам.
Корпус датчика преимущественно имеет плоскую форму, обеспечивает несущие функции и может быть представлен в виде подложки или платы, на которой могут быть смонтированы световые излучатели и фотоэлектрические приемники, либо в качестве отдельного элемента, выполненного из любого известного конструкционного материала, на котором или внутри которого может быть закреплена подложка или плата. При этом в качестве такого элемента может быть представлен культеприемник протеза. Корпус имеет поверхность для взаимодействия с конечностью пользователя, которая может быть расположена с противоположной или на смежной стороне корпуса, предназначенной для закрепления датчика в культеприемнике протеза. Также эта поверхность характеризуется тем, что на ней могут быть расположены барьеры, препятствующие прямому взаимодействию элементов одного оптического датчика друг с другом.
Оптические датчики установлены на поверхности корпуса датчика, предназначенной для взаимодействия с конечностью пользователя, что позволяет организовать передачу рассеянного через подкожную структуру конечности пользователя света от излучателя к фотоэлектрическому приемнику оптического датчика. Также они могут быть расположены на поверхностях, смежных с поверхностью для взаимодействия с конечностью пользователя при условии отсутствия препятствующих световому излучению и приему светового излучения со стороны корпуса элементов. При этом световой излучатель и фотоэлектрический приемник каждого оптического датчика могут быть установлены в соответствующие углубления корпуса таким образом, чтобы оптические оси излучателя и приемника были перпендикулярны поверхности для взаимодействия с конечностью пользователя.
Световой излучатель и фотоэлектрический приемник каждого оптического датчика установлены на фиксированном расстоянии друг относительно друга, что обеспечивает возможность получения сигнала фотоэлектрическим приемником и снижает влияние помех. При этом указанное расстояние варьируется в диапазоне от 5 до 50 мм в то время, как расстояние между световыми излучателями и фотоэлектрическими приемниками соседних оптических датчиков обусловлено только количеством используемых оптических датчиков и возможными размерами датчика. При этом, соответственно, чем меньше расстояние между оптическими датчиками и чем большее количество оптических датчиков содержит оптомиографический датчик, тем выше будет точность его калибровки, что также упрощает процесс настройки протеза. В наиболее предпочтительном варианте расстояние между световым излучателем и фотоэлектрическим приемником каждого оптического датчика составляет от 10 до 15 мм.
Оптомиографический датчик снабжен средством поочередной активации отдельных оптических датчиков, за счет чего снижается количество итераций снятий/установок протеза и перемещений датчика внутри культеприемной гильзы, снижая таким образом длительность процесса калибровки датчика и упрощая способ настройки электромеханического протеза.
Средство поочередной активации отдельных оптических датчиков обеспечивает возможность замыкания и размыкания цепи питания световых излучателей и/или приемников и может быть представлено в виде одного много позиционного или нескольких однопозиционных ручных переключателей, подключенных в цепь питания компонентов датчика и расположенных с противоположной стороны корпуса от поверхности для взаимодействия с конечностью пользователя. Либо это средство может быть представлено в виде микросхемы или контроллера с функцией автоматического переключателя. Средство поочередной активации отдельных оптических датчиков может быть представлено отдельным элементом и может быть соединено с датчиком любыми известными средствами передачи данных, либо оно может быть смонтировано непосредственно на корпусе датчика, что упрощает монтаж датчика внутрь культеприемной гильзы протеза.
Дополнительно для упрощения процесса калибровки оптомиографического датчика, он может содержать элемент настройки интенсивности излучения света, попадающий на приемник оптического датчика сигнала на приемнике оптического датчика, который может быть представлен подстроечным или переменным резистором, подключенным в цепь питания приемника и расположенным с противоположной стороны корпуса от поверхности для взаимодействия с конечностью пользователя.
Калибровку оптомиографического датчика электромеханического протеза производят путем поочередной активации оптических датчиков оптомиографического датчика, для чего датчик предварительно устанавливают внутрь культеприемной гильзы протеза в месте, наиболее соответствующем изменению необходимого состояния конечности пользователя, и задействуют средство поочередной активации отдельных оптических датчиков.
Изменение показателя относительного изменения светопроницаемости., регистрируемого приемником, позволяет определить локальное кровенаполнение мышечной ткани, вызванное ее сокращением, изменение кривизны мышечных волокон, перемещение сухожилий в подкожных структурах и другие изменения механических и оптических свойств, ассоциированных с мышечной активностью.
Изменение показателя относительного изменения светопроницаемости., регистрируемого приемником может быть осуществлено любыми известными средствами обработки сигнала, в том числе мультиметром, или для упрощения способа настройки электромеханического протеза для этого могут быть использованы элементы световой индикации, подключенные к выходу приемника каждого оптического датчика. При этом в процессе калибровки датчика может быть выбран один или несколько оптических датчиков, имеющих наиболее высокий показатель светопроницаемости.
Группа изобретений может быть выполнена из известных материалов с помощью известных средств, что свидетельствует о ее соответствии критерию патентоспособности «промышленная применимость».
Группа изобретений характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что:
- оптомиографический датчик электромеханического протеза снабжен средством поочередной активации оптических датчиков, что позволяет задействовать в процессе калибровки оптомиографического датчика отдельные оптические датчики, благодаря чему определить оптический датчик с наибольшей светопроницаемостью и интенсивностью излучения света, попадающей на приемник в процессе изменения состояния конечности пользователя протеза;
- калибровку оптомиографического датчика электромеханического протеза производят путем поочередной активации оптических датчиков оптомиографического датчика и регистрации той пары оптических датчиков, от которой был получен наиболее высокий показатель относительного изменения светопроницаемости., за счет чего в процессе настройки протеза снижается количество итераций снятий/установок протеза и перемещений датчика внутри культеприемной гильзы, снижая таким образом длительность и сложность процесса калибровки оптомиографического датчика.
Совокупность существенных признаков группы изобретений обеспечивает возможность определения в оптомиографическом датчике оптического датчика с наибольшей светопроницаемостью, попадающей на приемник в процессе изменения состояния конечности пользователя протеза, что позволяет снизить таким образом длительность и сложность процесса калибровки оптомиографического датчика электромеханического протеза.
Благодаря этому обеспечивается достижение технического результата, заключающегося в упрощении этапа калибровки оптомиографического датчика электромеханического протеза, тем самым упрощается способ настройки электромеханического протеза.
Группа изобретений характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о ее соответствии критерию патентоспособности «новизна».
Из уровня техники не известны существенные признаки группы изобретений, что свидетельствует о ее соответствии критерию патентоспособности «изобретательский уровень».
Изобретения из группы изобретений связаны между собой и образуют единый изобретательский замысел, который заключается в том, что оптомиографический датчик электромеханического протеза используется в способе настройки электромеханического протеза, что свидетельствует о соответствии группы изобретений критерию патентоспособности «единство изобретения».
Группа изобретений поясняется следующими фигурами.
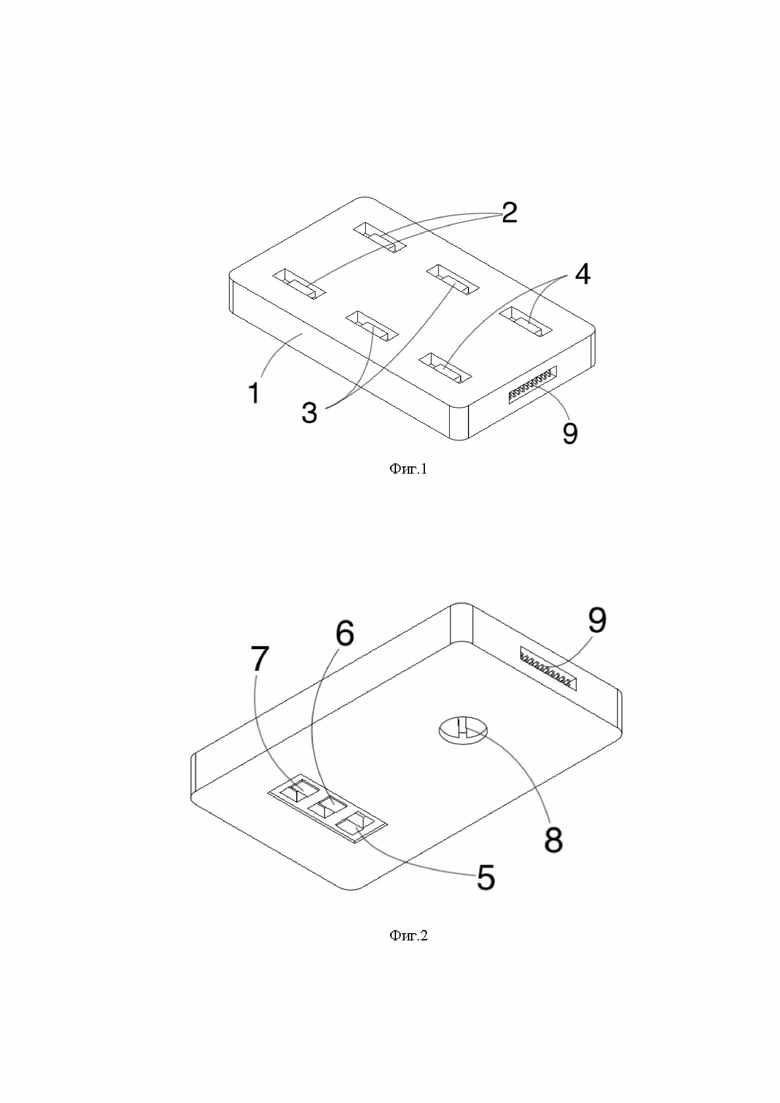
Фиг. 1 - Оптомиографический датчик электромеханического протеза, изометрия, вид сверху.
Фиг. 2 Оптомиографический датчик электромеханического протеза, изометрия, вид снизу.
Для иллюстрации возможности реализации и более полного понимания сути группы изобретений ниже представлен вариант ее осуществления, который может быть любым образом изменен или дополнен, при этом настоящая группа изобретений ни в коем случае не ограничивается представленным вариантом.
Оптомиографический датчик электромеханического протеза содержит корпус 1, в углублениях которого расположены оптические датчики 2, 3 и 4, состоящие из инфракрасных излучателей и фотоэлектрических приемников, смонтированных на плате, при этом с другой стороны платы в углублении корпуса 1 смонтированы выключатели питания 5, 6, 7 инфракрасных излучателей оптических датчиков 2, 3 и 4 соответственно, а приемники подключены через подстроечный резистор 8. При этом на плате также смонтирован интерфейс 9 для подключения датчика к контроллеру электромеханического протеза (не показан на фигурах).
Группа изобретений работает следующим образом.
Электромеханический протез верхней конечности с установленным и закрепленным внутри его гильзы оптомиографическим датчиком закрепляли на культе верхней конечности пользователя протеза. В процессе калибровки оптомиографического датчика электромеханического протеза пользователь осуществлял мышечную активность, направленную на изменение угла раствора кисти руки протеза, что приводило к сокращению мышечной ткани в подкожных структурах культи пользователя протеза.
В процессе калибровки оптмиографического датчика оператор поочередно задействовал оптические датчики 2, 3 и 4 посредством выключателей питания 5, 6, 7 инфракрасных излучателей через монтажное отверстие в культеприемнике протеза. В процессе сокращения мышечной ткани происходило изменение величины рассеяния ИК-излучения в тканях конечности пользователя протеза и соответственно изменение показателя светопроницаемости, получаемого приемником каждого оптического датчика 2, 3 и 4. При этом за счет индикации на контроллере электромеханического протеза осуществлялась регистрация наиболее высокого показателя светопроницаемости, получаемого каждым отдельным оптическим датчиком 2, 3 и 4. Путем регулировки подстроечного резистора 8 осуществлялась более тонкая настройка приемников. Поскольку наиболее высокий показатель светопроницаемости регистрировался парой 2, то она выбиралась в качестве предпочтительной для изменения угла раствора кисти руки протеза и управления таким образом электромеханическим протезом.
Таким образом, достигался технический результат, заключающийся в упрощении этапа калибровки оптомиографического датчика электромеханического протеза, тем самым упрощался способ настройки электромеханического протеза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптомиографический датчик электромеханического протеза | 2021 |
|
RU2775757C1 |
| Система и способ управления электромеханическим протезом | 2021 |
|
RU2762766C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВНЕШНИМИ УСТРОЙСТВАМИ, ПОСРЕДСТВОМ ЧЕЛОВЕКО-МАШИННОГО ИНТЕРФЕЙСА | 2024 |
|
RU2840380C1 |
| Способ изготовления приемных гильз протезов конечностей | 1982 |
|
SU1099963A1 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |
| Устройство для распределения нагрузки в гильзе протеза нижней конечности | 1982 |
|
SU1018633A1 |
| Протез голени с голеностопом | 2024 |
|
RU2832615C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
Группа изобретений относится к медицинской технике, а именно к оптомиографическому датчику электромеханического протеза и способу настройки электромеханического протеза. Оптомиографический датчик содержит корпус. Корпус имеет поверхность для взаимодействия с конечностью пользователя. На поверхности корпуса расположены оптические датчики для получения данных о процессах, происходящих в подкожной структуре культи конечности пользователя. Оптомиографический датчик снабжен средством поочередной активации оптических датчиков. Корпус содержит элемент настройки интенсивности излучения света, попадающий на приемник оптического датчика. Элемент настройки расположен с противоположной стороны корпуса от поверхности для взаимодействия с конечностью пользователя. Оптические датчики предназначены для получения данных об изменении кривизны мышечных волокон, или кровенаполнении мышечной ткани, или перемещении сухожилий, происходящих под кожей культи конечности пользователя. При исполнении способа закрепляют электромеханический протез культеприемником на конечности пользователя. Калибруют оптомиографический датчик. При этом калибровку оптомиографического датчика производят путем поочередной активации оптических датчиков для получения данных об изменении кривизны мышечных волокон, или кровенаполнения мышечной ткани, или перемещения сухожилий, происходящих под кожей культи конечности пользователя. Регистрируют оптический датчик, для которого был получен наиболее высокий показатель относительного изменения светопроницаемости. Обеспечивается оптомиографический датчик электромеханического протеза для управления протезом с возможностью проведения настройки за счет элемента поочередной активации оптических датчиков и упрощение этапа калибровки оптомиографического датчика электромеханического протеза. 2 н. и 5 з.п. ф-лы, 2 ил.
1. Оптомиографический датчик электромеханического протеза, содержащий корпус, имеющий поверхность для взаимодействия с конечностью пользователя, на которой расположены оптические датчики для получения данных о процессах, происходящих в подкожной структуре культи конечности пользователя, отличающийся тем, что снабжен средством поочередной активации оптических датчиков, корпус содержит элемент настройки интенсивности излучения света, попадающий на приемник оптического датчика, расположенный с противоположной стороны корпуса от поверхности для взаимодействия с конечностью пользователя, а оптические датчики предназначены для получения данных об изменении кривизны мышечных волокон, или кровенаполнении мышечной ткани, или перемещении сухожилий, происходящих под кожей культи конечности пользователя.
2. Датчик по п. 1, отличающийся тем, что расстояние между световыми излучателями и фотоэлектрическими приемниками оптических датчиков составляет от 5 до 50 мм.
3. Датчик по п. 2, отличающийся тем, что расстояние составляет от 10 до 15 мм.
4. Датчик по п. 1, отличающийся тем, что средство поочередной активации отдельных оптических датчиков представлено в виде одного многопозиционного ручного переключателя, расположенного с противоположной стороны корпуса от поверхности для взаимодействия с конечностью пользователя.
5. Способ настройки электромеханического протеза, включающий закрепление электромеханического протеза культеприемником на конечности пользователя и калибровку оптомиографического датчика электромеханического протеза, отличающийся тем, что калибровку оптомиографического датчика электромеханического протеза производят путем поочередной активации оптических датчиков для получения данных об изменении кривизны мышечных волокон, или кровенаполнения мышечной ткани, или перемещения сухожилий, происходящих под кожей культи конечности пользователя, и регистрацию оптического датчика, для которого был получен наиболее высокий показатель относительного изменения светопроницаемости.
6. Способ по п. 6, отличающийся тем, что поочередная активация отдельных оптических датчиков осуществляется многопозиционным ручным переключателем.
7. Способ по п. 7, отличающийся тем, что дополнительно осуществляется настройка приемника оптического датчика.
| CN 103610443 A, 05.03.2014 | |||
| Система нейрореабилитации и способ нейрореабилитации | 2020 |
|
RU2741215C1 |
| CN 111031970 A, 17.04.2020 | |||
| US 2018081439 A1, 22.03.2018 | |||
| WO 2010009452 A1, 21.01.2010 | |||
| US 2015366504 A1, 24.12.2015 | |||
| HAMED HAMID MUHAMMED Optomyography (OMG): A Novel Technique for the Detection of Muscle Surface Displacement Using Photoelectric Sensors // School of Technology and Health | |||

