Изобретение относится к медицинской технике, а именно к протезированию и протезостроению.
Известен «Протез предплечья» по а.с. №1416120, МПК A61F 2/54, содержащий искусственную кисть, несущую гильзу, выполненную в виде шин, соединенных кольцом и снабженных манжеткой. В несущей гильзе размещена приемная гильза, соединенная соосно с приводным валом кисти и с возможностью вращения с ним.
Недостатком данного устройства является то, что движение вращения приемной гильзы используется для выполнения функции схвата, а активные функции ротации кисти и сгибания кисти не реализуются.
Известен также «Протез предплечья» по патенту №2271778, A61F 2/54, содержащий искусственную кисть, несущую гильзу с элементами крепления, размещенную в ней приемную гильзу, соединенную соосно с валом механического привода и, соответственно, с возможностью вращения с ним, обеспечивая активную ротацию кисти и схват.
К недостаткам данного устройства можно отнести сложность управления из-за необходимости последовательно выполнять переключения для использования функций подвижности. Кроме того, в данном устройстве не решается задача активного сгибания-разгибания кисти.
Наиболее близким по функциональной и технической сущности является выбранный авторами в качестве прототипа «Протез предплечья» по патенту №2541816, МПК A61F 2/54.
Устройство содержит искусственную электромеханическую кисть с биоэлектрическим управлением приводом, несущую гильзу, соединенную с опорным корпусом механического привода ротации кисти и снабженную элементами крепления, а также приемную гильзу, размещенную в несущей гильзе, соосно соединенную с валом механического привода ротации кисти и, соответственно, с возможностью вращения с ним, а также привод сгибания кисти, разъемный наплечник с возможностью охвата плечевого сустава руки. (Описание протеза предплечья, в состав которого входит узел - кисть искусственная с биоэлектрическим управлением, дано в книге «Справочник по протезированию» под редакцией В.И. Филатова. Л.: Медицина, 1978, стр. 131).
Недостатком прототипа является то, что он имеет ограниченный контингент пользователей, поскольку может быть востребован только инвалидами с длинной и, как правило, булавовидной культей предплечья, развивающей достаточные усилия для приведения в действие механического привода пронации и супинации. Кроме того, механизм активного сгибания-разгибания кисти имеет низкую эффективность из-за податливости мягких тканей и неустойчивого положения наплечника при силовой работе гибкой механической передачи. Для управления устройство требует больших энергозатрат инвалида, причем устройство нуждается в сложной ежедневной настройке непосредственно на инвалиде.
Задачей предлагаемого изобретения является повышение удобства инвалида путем снижения его энергетических затрат при управлении устройством благодаря введению электромеханических приводов ротации и сгибания кисти, что снижает уровень силового воздействия на несущую и приемную гильзы и разъемный наплечник, обеспечивает расширение, таким образом, контингента пользователей и повышение удобства при выполнении целенаправленных действий по самообслуживанию благодаря сокращению объема компенсаторных движений и одновременному управлению в естественном режиме тремя степенями подвижности протеза руки.
Технический результат поставленной задачи достигается тем, что протез предплечья, содержащий искусственную электромеханическую кисть, несущую гильзу, соединенную с опорным корпусом и снабженную элементами крепления, приемную гильзу, размещенную в несущей гильзе с возможностью поворота, привод ротации, привод сгибания кисти, разъемный наплечник с возможностью охвата плечевого сустава руки, отличается тем, что привод сгибания кисти имеет электродвигатель, упругий стержень в гибкой оболочке, шарнир с подвижной и неподвижной частью и систему управления приводом сгибания кисти, подвижная часть шарнира соединена с искусственной электромеханической кистью, первый конец упругого стержня зафиксирован одним концом на наплечнике, а вторым на несущей гильзе, при этом второй конец упругого стержня оставлен свободным, система управления приводом сгибания кисти состоит из датчика управления сгибанием кисти и датчика обратной связи в виде датчика угла сгибания кисти, соединенных с входом второго сумматора, на выходе которого подключены третий и четвертый импульсные преобразователи, соединенные со вторым усилителем мощности, выход которого подключен к электродвигателю, датчик управления сгибанием кисти закреплен на наплечнике, причем его ротор неподвижно соединен с первым концом упругого стержня, электродвигатель присоединен к неподвижной части шарнира, а его выходной вал соединен с подвижной частью шарнира, статор датчика угла сгибания кисти неподвижно соединен с неподвижной частью шарнира, а его ротор с выходным валом электродвигателя, привод ротации кисти расположен в несущей гильзе и имеет электродвигатель, поворотную пружинную муфту, вал и систему управления приводом ротации кисти, состоящую из датчика управления ротацией кисти и источника опорного напряжения, соединенных с входом первого сумматора, на выходе которого подключен первый и второй импульсные преобразователи, соединенные с первым усилителем мощности, выход которого подключен к электродвигателю, а вал выполнен с возможностью формирования обратной связи по положению и усилию на датчике управления ротацией кисти, ротор пружинной муфты шарнирно установлен в статоре пружинной муфты, при этом одним концом посредством зубчатой передачи соединен с ротором датчика управления ротацией кисти, а другим концом неподвижно соединен с приемной гильзой, электродвигатель неподвижно соединен с опорным корпусом и посредством зубчатой передачи соединен с валом, причем вал шарнирно установлен в опорном корпусе и одним концом соединен неподвижно с неподвижной частью шарнира привода сгибания кисти, а другим - соединен со статором поворотной пружинной муфты, искусственная электромеханическая кисть имеет систему управления схватом - раскрытием пальцев кисти, содержащую две электрические цепи последовательно соединенных: чувствительного элемента управления кистью, предварительного усилителя и прибора детектирования и фильтрации сигнала, присоединенных к усилителю мощности, который подключен к электродвигателю кисти, причем чувствительные элементы управления кистью выполнены в виде двух пар поверхностных электродов, закрепленных на несущей гильзе, а последняя выполнена конструктивно «неспадающей».
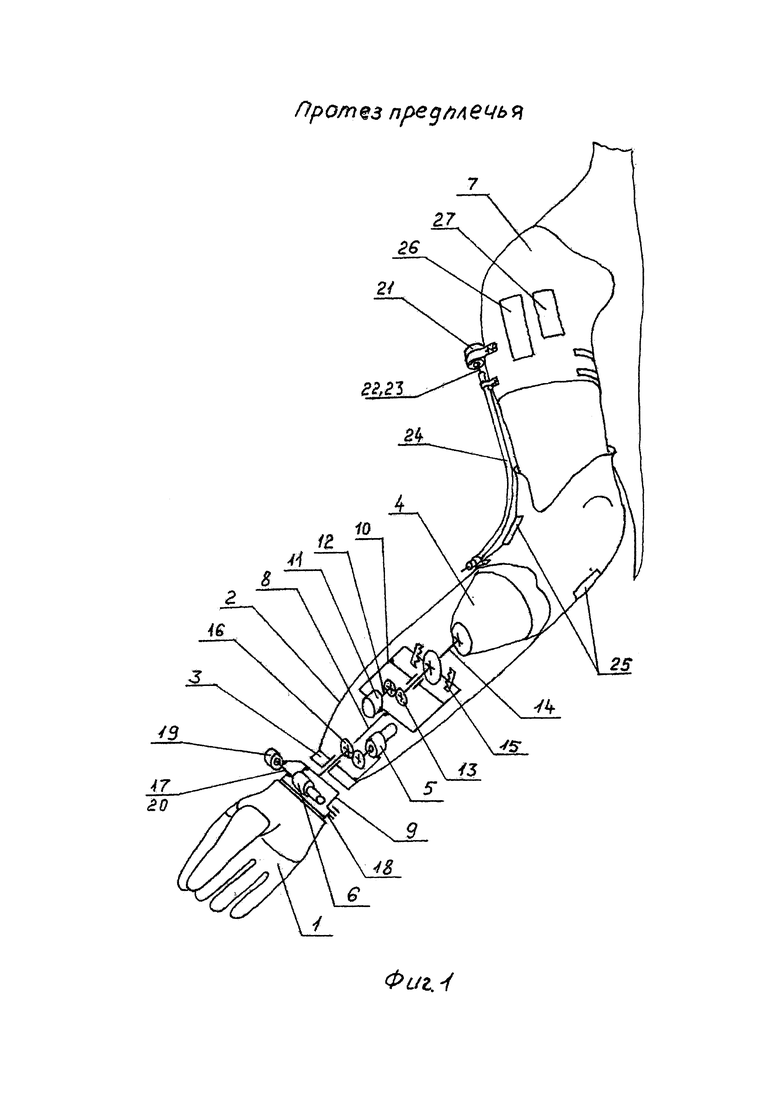
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена конструктивная схема протеза предплечья с мотор-редукторами электромеханических приводов ротации и сгибания кисти, на фиг. 2 представлена структурная схема одноканальной системы управления функцией ротации кисти, на фиг. 3 представлена структурная схема одноканальной системы управления функцией сгибания кисти, на фиг. 4 представлена структурная схема двухканального биоэлектрического управления искусственной кистью протеза.
Протез предплечья содержит искусственную кисть 1, несущую гильзу 2, выполненную «неспадающей» и соединенную с опорным корпусом 3 механизма ротации кисти, приемную гильзу 4, мотор-редуктор привода ротации кисти 5, мотор-редуктор привода сгибания кисти 6, разъемный наплечник 7 с возможностью охвата плечевого сустава руки. Причем в опорном корпусе механизма ротации кисти шарнирно установлен вал 8 механизма ротации кисти, соединенный одним концом с неподвижной частью 9 шарнира сгибания кисти, а вторым - со статором поворотной пружинной муфты 10, в котором неподвижно закреплен датчик управления ротацией кисти 11, ротор 12 которого кинематически посредством зубчатой передачи 13 соединен с ротором 14 пружинной муфты. Ротор 14 шарнирно установлен в статоре пружинной муфты 10 с ограничением поворота относительно статора в пределах деформации пружин 15. К ротору 14 неподвижно соосно присоединена приемная гильза 4. Мотор-редуктор 5 ротации кисти неподвижно соединен с опорным корпусом 3 механизма ротации кисти и кинематически посредством зубчатой передачи 16 соединен с валом 8 механизма ротации кисти, при этом мотор-редуктор 6 сгибания кисти присоединен к неподвижной части 9 механизма сгибания кисти, а его выходной вал 17 соединен с подвижной частью 18 механизма сгибания кисти. При этом статор датчика 19 угла сгибания кисти, выполняющий функцию датчика обратной связи, также неподвижно соединен с неподвижной частью 9 механизма сгибания кисти, а его ротор 20 соединен с выходным валом 17 мотор-редуктора 6 сгибания кисти и соответственно с подвижной частью 18 механизма сгибания кисти.
Кроме того, на наплечнике 7 закреплен датчик 21 управления сгибанием кисти, ротор 22 которого неподвижно соединен с первым концом упругого гибкого стержня 23, помещенного в гибкую оболочку 24, зафиксированную одним концом на наплечнике 7, а вторым на несущей гильзе 2, оставив свободным второй конец гибкого стержня.
Чувствительные элементы управления кистью в виде двух пар поверхностных электродов 25 закреплены на несущей гильзе 2, а электронный блок 26 управления приводами и источник электропитания 27 закреплены на наплечнике.
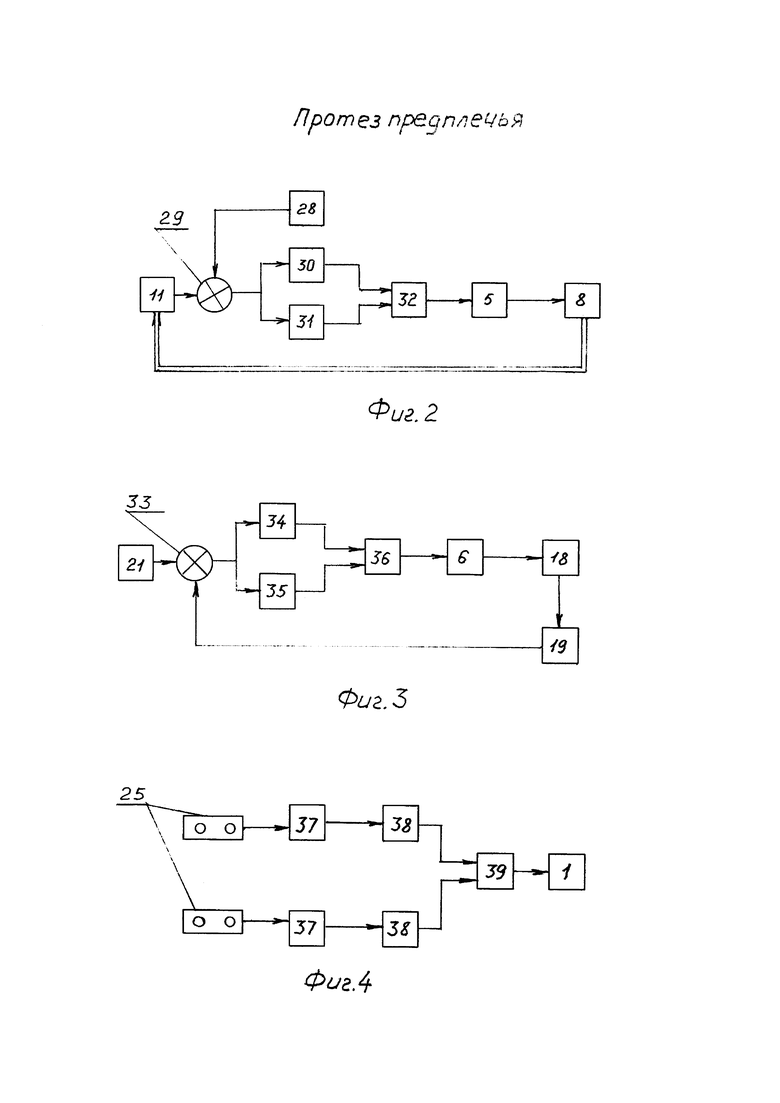
Электронный блок управления 26 структурно содержит три системы независимого управления движением исполнительных механизмов: одноканальную систему управления ротацией кисти, одноканальную систему управления сгибанием кисти и двухканальную систему биоэлектрического управления схватом-раскрытием пальцев кисти.
В системе управления приводом ротации кисти датчик 11 управления ротацией кисти и источник опорного напряжения 28 соединены с первым сумматором 29, который соединен с первым и вторым импульсными преобразователями 30 и 31, соединенными с усилителем мощности 32, выход которого подключен к мотор-редуктору 5 электропривода ротации кисти.
В системе управления приводом сгибания кисти датчик 21 управления сгибанием кисти и датчик 19 угла сгибания кисти, выполняющий функцию датчика обратной связи, соединены со вторым сумматором 33, который соединен с третьим и четвертым импульсными преобразователями 34 и 35, соединенными с усилителем мощности 36, выход которого подключен к мотор-редуктору 6 электропривода сгибания кисти. Система управления схватом-раскрытием пальцев кисти содержит две электрические цепи последовательно соединенных: чувствительного элемента 25 управления кистью, предварительного усилителя 37 и прибора 38 детектирования и фильтрации сигнала, присоединенных к усилителю мощности 39, который подключен к мотор-редуктору электропривода кисти 1.
Устройство работает следующим образом. В исходном состоянии при работе с объектами манипулирования предплечье согнуто в локтевом суставе оператора-инвалида. При неподвижной культе предплечья разность сигналов от источника опорного напряжения 28 и датчика 11 ротации кисти равна нулю (вычитание обеспечивает сумматор 29). При движении ротации культи предплечья выполняется поворот приемной гильзы 4, которая поворачивает ротор 14 пружинной муфты 10. Одновременно через зубчатую передачу 13 поворачивается ротор 12 датчика 11 угла ротации кисти, что приводит к рассогласованию исходных сигналов. Разность сигналов, которая получается на выходе сумматора 29, является сигналом управления и может быть положительной или отрицательной в зависимости от направления ротации культи, что меняет полярность питания на приводе. Чем больше величина рассогласования, тем больше сигнал управления ротацией, который поступает на импульсные преобразователи 30, 31, далее последовательно на широтно-импульсный усилитель мощности 32, мотор-редуктор 5 привода ротации кисти и вал 8 механизма ротации кисти, который соединен через пружинную муфту 10 с приемной гильзой, что формирует механическую обратную связь по положению и усилию исполнительного механизма. При остановке пронации или супинации культи привод доводит устройство до момента согласования сигналов, сигнал управления становится равным нулю и привод останавливается.
При закрепощенном (неактивном) в протезе предплечья лучезапястном сочленении для выполнения манипуляций с различными объектами, например при попытке взять предмет сбоку или сверху в пределах рабочей зоны, инвалид компенсаторно использует повышенную амплитуду отведения плеча и ротации плеча. Здоровый человек при функционирующем лучезапястном сочленении использует в большей степени сгибание кисти. В предлагаемом устройстве движение ротации плеча используется в качестве управляющего сгибанием-разгибанием кисти, что сокращает объем компенсаторных движений и делает рисунок движения близким к естественному. Инвалид, начиная компенсаторное движение ориентации кисти, естественным образом начинает управлять сгибанием кисти.
При неподвижной культе предплечья, когда ротация плеча не производится, разность сигналов от датчика 21 управления сгибанием кисти и датчика 19 сгибания кисти (датчика обратной связи) равна нулю (вычитание обеспечивает сумматор 33). При неспадающей несущей гильзе локоть при максимально выпрямленной руке согнут на 6-7 градусов, что позволяет обеспечить поворот ротора 22 датчика 21 при ротации плеча во всем диапазоне положений согнутой руки.
В качестве примера выполнения элементов крепления несущей гильзы и конструктивных признаков, характеризующих пример выполнения несущей гильзы конструктивно неспадающей, может служить описание, приведенное в книге «Конструкции протезно-ортопедических изделий» под редакцией канд. техн. наук А.П. Кужекина. М.: Легкая и пищевая промышленность, 1984, стр. 166. Термин «неспадающая» широко используется в протезировании и подразумевает особенности конструкции (формы пелотов и углублений) гильзы в районе локтевого сустава руки. Особенности конструкции неспадающей гильзы приведены в книге «Технология протезно-ортопедических изделий», под редакцией канд. техн. наук А.П. Кужекина. М.: Легпромбытиздат, 1985, стр. 263, а также в книге «Технические средства реабилитации больных и инвалидов с поражением верхних конечностей», методическое пособие под редакцией д.м.н. проф. С.Ф. Курдыбайло, ООО «Вега», 2013, стр. 48.
При повороте предплечья относительно плеча в сторону выбранного объекта манипулирования, например при приведении предплечья, выполняется разворот несущей гильзы 2 совместно с гибкой оболочкой 24 и упругим стержнем 23 относительно наплечника 7. При этом происходит поворот гибкого стержня 23 совместно с ротором 22 датчика 21 управления сгибанием кисти, что приводит к рассогласованию исходных сигналов датчиков 19 и 21. Разность сигналов, которая получается на выходе сумматора 33, является сигналом управления и может быть положительной или отрицательной в зависимости от направления движения культи, что меняет полярность питания на приводе. Чем больше величина рассогласования, тем больше сигнал управления сгибанием кисти, который поступает на импульсные преобразователи 34, 35, далее последовательно на широтно-импульсный усилитель мощности 36, мотор-редуктор 6 привода сгибания кисти, исполнительный механизм - подвижную часть 18 механизма сгибания кисти и датчик обратной связи 19. Реализуется обратная связь по положению исполнительного звена (позиционная обратная связь). При остановке культи привод доводит устройство до момента согласования сигналов, сигнал управления становится равным нулю и привод останавливается.
Управление схватом, закрытие пальцев искусственной кисти 1, выполняют подачей сигналов на одну из пар электродов 25 при сокращении сохраненных мышц сгибателей кисти (первый канал системы биоэлектрического управления).
Далее сигнал последовательно поступает на предварительный усилитель 37, а затем на прибор 38 детектирования, который обеспечивает также фильтрацию сигнала. Затем отфильтрованный сигнал поступает на широтно-импульсный усилитель 39 электрически соединенный с мотор-редуктором электромеханической кисти 1.
Для раскрытия пальцев кисти сигнал подается на вторую пару электродов при сокращении мышц разгибателей кисти и далее преобразование сигнала производится аналогичным путем по второму каналу системы биоэлектрического управления.
Таким образом, предлагаемое устройство позволяет без дополнительных переключений в естественном режиме использовать три степени подвижности, в том числе сгибание-разгибание кисти, ротацию кисти и схват-раскрытие пальцев.
Положительный эффект заявляемого изобретения заключается в следующем: обеспечивается удобство пользования протезом благодаря снижению энергетических затрат инвалида при управлении, в связи с чем расширяется контингент пользователей, а также повышается удобство выполнения целенаправленных действий по самообслуживанию благодаря сокращению объема компенсаторных движений и одновременному использованию в естественном режиме трех степеней подвижности, что сокращает время выполнения двигательных операций при пользовании протезом.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
| ПРОТЕЗ ГОЛЕНИ | 2019 |
|
RU2695948C1 |
| ПРОТЕЗ ГОЛЕНИ | 2017 |
|
RU2655452C1 |
| СИСТЕМА УПРАВЛЕНИЯ БИОЭЛЕКТРИЧЕСКИМ ПРОТЕЗОМ | 2016 |
|
RU2653820C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
Изобретение относится к медицине. Протез предплечья содержит искусственную электромеханическую кисть с биоэлектрическим управлением приводом, несущую гильзу, соединенную с опорным корпусом и снабженную элементами крепления, приемную гильзу, размещенную в несущей гильзе с возможностью поворота, привод ротации кисти, привод сгибания кисти, разъемный наплечник с возможностью охвата плечевого сустава руки. Несущая гильза выполнена конструктивно неспадающей. Привод ротации и привод сгибания кисти выполнены электромеханическими с позиционным управлением. В опорном корпусе шарнирно установлен вал ротации кисти, неподвижно соединенный одним концом с шарниром сгибания кисти, а другим со статором поворотной пружинной муфты, в котором неподвижно закреплен датчик управления ротацией кисти, ротор которого кинематически, например посредством зубчатой передачи, соединен с ротором пружинной муфты, соединенным с приемной гильзой. Привод ротации неподвижно закреплен на опорном корпусе и кинематически, например посредством зубчатой передачи, соединен с валом ротации кисти. На неподвижной части шарнира сгибания кисти, соединенной с валом ротации кисти, зафиксирован привод сгибания кисти, выходной вал которого соединен с подвижной частью шарнира сгибания кисти, также зафиксирован датчик угла сгибания кисти, а его ротор соединен с подвижной частью шарнира сгибания кисти. На наплечнике закреплен датчик управления сгибанием кисти, ротор которого неподвижно соединен с первым концом упругого стержня, помещенного в гибкую оболочку, зафиксированную одним концом на наплечнике, а вторым на несущей гильзе. Второй конец упругого стержня оставлен свободным. В электронном блоке управления сформированы три системы независимого управления исполнительными механизмами. В канале управления приводом ротации кисти датчик управления ротацией кисти и источник опорного напряжения соединены со входом первого сумматора, на выходе которого подключен первый и второй импульсные преобразователи, соединенные с первым усилителем мощности, выход которого подключен к электроприводу ротации кисти. В канале управления приводом сгибания кисти датчик управления сгибанием кисти и датчик обратной связи в виде датчика угла сгибания кисти соединены со входом второго сумматора, на выходе которого подключены третий и четвертый импульсные преобразователи, соединенные со вторым усилителем мощности, выход которого подключен к электроприводу сгибания кисти. В системе управления кистью чувствительные элементы в виде двух пар поверхностных электродов закреплены на несущей гильзе и электрически соединены с электронным блоком управления. Электронный блок управления и источник электропитания закреплены на наплечнике. Изобретение обеспечивает повышение удобства инвалида путем снижения его энергетических затрат при управлении устройством, повышение удобства при выполнении целенаправленных действий по самообслуживанию благодаря сокращению объема компенсаторных движений и одновременному управлению в естественном режиме тремя степенями подвижности протеза руки. 4 ил.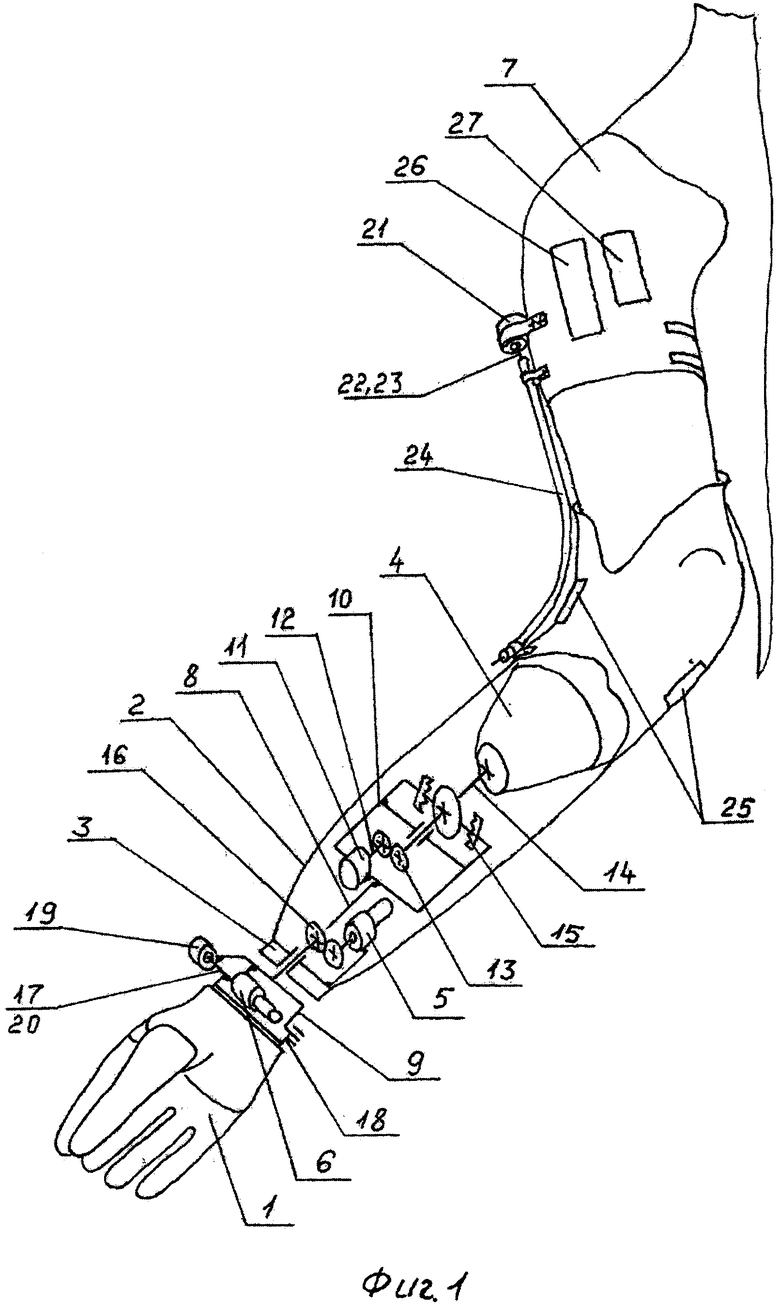
Протез предплечья, содержащий искусственную электромеханическую кисть с биоэлектрическим управлением приводом, несущую гильзу, соединенную с опорным корпусом и снабженную элементами крепления, приемную гильзу, размещенную в несущей гильзе с возможностью поворота, привод ротации кисти, привод сгибания кисти, разъемный наплечник с возможностью охвата плечевого сустава руки, отличающийся тем, что несущая гильза выполнена конструктивно неспадающей, а привод ротации и привод сгибания кисти выполнены электромеханическими с позиционным управлением, при этом в опорном корпусе шарнирно установлен вал ротации кисти, неподвижно соединенный одним концом с шарниром сгибания кисти, а другим со статором поворотной пружинной муфты, в котором неподвижно закреплен датчик управления ротацией кисти, ротор которого кинематически, например посредством зубчатой передачи, соединен с ротором пружинной муфты, соединенным с приемной гильзой, при этом привод ротации неподвижно закреплен на опорном корпусе и кинематически, например посредством зубчатой передачи, соединен с валом ротации кисти, причем на неподвижной части шарнира сгибания кисти, соединенной с валом ротации кисти, зафиксирован привод сгибания кисти, выходной вал которого соединен с подвижной частью шарнира сгибания кисти, также зафиксирован датчик угла сгибания кисти, а его ротор соединен с подвижной частью шарнира сгибания кисти, при этом на наплечнике закреплен датчик управления сгибанием кисти, ротор которого неподвижно соединен с первым концом упругого стержня, помещенного в гибкую оболочку, зафиксированную одним концом на наплечнике, а вторым на несущей гильзе, при этом второй конец упругого стержня оставлен свободным, кроме того, в электронном блоке управления сформированы три системы независимого управления исполнительными механизмами, причем в канале управления приводом ротации кисти датчик управления ротацией кисти и источник опорного напряжения соединены со входом первого сумматора, на выходе которого подключен первый и второй импульсные преобразователи, соединенные с первым усилителем мощности, выход которого подключен к электроприводу ротации кисти, кроме того, в канале управления приводом сгибания кисти датчик управления сгибанием кисти и датчик обратной связи в виде датчика угла сгибания кисти соединены со входом второго сумматора, на выходе которого подключены третий и четвертый импульсные преобразователи, соединенные со вторым усилителем мощности, выход которого подключен к электроприводу сгибания кисти, причем в системе управления кистью чувствительные элементы в виде двух пар поверхностных электродов закреплены на несущей гильзе и электрически соединены с электронным блоком управления, а электронный блок управления и источник электропитания закреплены на наплечнике.
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| ППЕСКДЯ Я. Л. Славуцкий, И. С. Гольберг, Е. А. Широкова, Е. П. Йоляни Д. М. ИоффеIЬ^ | 0 |
|
SU198523A1 |
| US 2009229398 A1, 17.09.2009 | |||
| US 2007021841 A1, 25.01.2007 | |||
| US 3883900 A, 20.05.1975. | |||

