Область техники, к которой относится изобретение
[0001] Настоящее изобретение в целом относится к очистительным системам сенсоров и в частности к системе и способу очистки поверхности сенсора на беспилотном автомобиле.
Уровень техники
[0002] Беспилотные автомобили (SDC) - это транспортные средства, которые могут автономно перемещаться по частным и/или общественным местам. Используя систему сенсоров, которые определяют местоположение и/или окружающую обстановку SDC, логика внутри или связанная с SDC управляет скоростью, движением, торможением и рулевым управлением SDC на основе обнаруженного сенсором местоположения и окружающей обстановки SDC.
[0003] SDC может использовать различные сенсорные системы, такие как, помимо прочего, системы камер, радарные системы и системы LIDAR. Различные сенсорные системы могут использоваться для сбора различной информации и/или в другом формате о местоположении и окружающей обстановке SDC. Например, системы камер могут использоваться для захвата данных изображения об окружающей обстановке SDC. В другом примере системы LIDAR могут использоваться для сбора данных облака точек не только для определения дальности объектов, но также для построения трехмерных картографических представлений окружающей обстановки и других потенциальных объектов, расположенных вблизи от SDC. Системы камер и системы LIDAR, среди прочего, реализованы с одним или более оптическими элементами для сбора данных. Погодные факторы, такие как дождь и грязь, могут загрязнять оптические элементы одной или более сенсорных систем, что снижает качество информации, собираемой сенсорными системами для безопасной эксплуатации SDC.
[0004] В Патенте США №. 9,505,382 раскрыта форсунка для очистки поверхности объектива камеры. Она включает в себя тракт для очистительной жидкости, который направляет очистительную жидкость к выпускному отверстию, и воздушный канал, который направляет сжатый воздух к выпускному отверстию. Кроме того, часть дальнего конца тракта для очистительной жидкости и часть дальнего конца воздушного канала расположены вблизи друг с другом.
Сущность изобретения
[0005] Следовательно, существует потребность в системах и способах, которые позволяют избежать, уменьшить или преодолеть ограничения предшествующего уровня техники.
[0006] В первом широком аспекте настоящего изобретения предложен блок подачи для очистительной системы. Очистительная система предназначена для очистки сенсорной системы беспилотного автомобиля (SDC). Сенсорная система и очистительная система установлены на SDC. Блок подачи содержит: жидкостную форсунку для подачи жидкостной струи и направления жидкостной струи к поверхности сенсорной системы; воздушную форсунку для подачи воздушной струи и направления воздушной струи к поверхности сенсорной системы, причем жидкостная форсунка расположена вблизи воздушной форсунки; отклоняющее отверстие для подачи другой воздушной струи для отклонения жидкостной струи в сторону от воздушной форсунки, при этом воздушная форсунка и отклоняющее отверстие сообщаются по текучей среде с единым воздушным коллектором.
[0007] В некоторых вариантах осуществления блока подачи жидкостная форсунка сообщается по текучей среде с резервуаром через жидкостный канал жидкостного коллектора, и воздушная форсунка сообщается по текучей среде с впускным отверстием для воздуха через воздушный канал единого воздушного коллектора. Воздушный канал разъединен по текучей среде с жидкостным каналом.
[0008] В некоторых вариантах осуществления блока подачи воздушный канал имеет дальний конец и ближний конец. Ближний конец по текучей среде соединен с впускным отверстием для воздуха. Дальний конец формирует (i) основную камеру для обеспечения воздуха в воздушную форсунку и (ii) вторичную камеру для обеспечения воздуха в отклоняющее отверстие.
[0009] В некоторых вариантах осуществления блока подачи сенсорная система имеет корпус, который имеет: нижнюю пластину для крепления к поверхности SDC; одну или более стенок, соединяющих нижнюю пластину с верхней пластиной, и поверхность сенсорной системы расположена внутри корпуса и обращена наружу к одной или более стенкам; и верхнюю пластину, образующую воздушный канал и жидкостный канал, и при этом блок подачи расположен на краю верхней пластины и ориентирован для подачи воздушной струи и жидкостной струи к поверхности сенсорной системы.
[00010] В некоторых вариантах осуществления блока подачи поверхность SDC представляет собой поверхность по меньшей мере одного из: крыши, передней решетки и боковой двери SDC.
[00011] Во втором широком аспекте настоящего изобретения предложена очистительная система для очистки сенсорной системы беспилотного автомобиля (SDC). Сенсорная система и очистительная система установлены на SDC. Очистительная система содержит: резервуар для хранения очистительной жидкости очистительной системы; впускное отверстие для воздуха для обеспечения источника воздуха в очистительную систему; жидкостный коллектор, обеспечивающий сообщение по текучей среде между (i) резервуаром и блоком подачи; воздушный коллектор для обеспечения сообщения по текучей среде между (ii) впускным отверстием для воздуха и блоком подачи; компрессорный блок для нагнетания (i) жидкости из резервуара в блок подачи и (ii) воздуха из впускного отверстия для воздуха в блок подачи. Блок подачи включает в себя: жидкостную форсунку для подачи жидкостной струи и направления жидкостной струи к поверхности сенсорной системы; воздушную форсунку для подачи воздушной струи и направления воздушной струи к поверхности сенсорной системы, причем жидкостная форсунка расположена вблизи воздушной форсунки; и отклоняющее отверстие для подачи другой воздушной струи для отклонения жидкостной струи в сторону от воздушной форсунки, и при этом воздушная форсунка и отклоняющее отверстие сообщаются по текучей среде с воздушным коллектором.
[00012] В некоторых вариантах осуществления очистительной системы компрессорный блок включает в себя (i) воздушный компрессор для нагнетания воздуха из впускного отверстия для воздуха в блок подачи и (ii) жидкостный компрессор для нагнетания очистительной жидкости из резервуара и блока подачи.
[00013] В некоторых вариантах осуществления очистительной системы жидкостная форсунка сообщается по текучей среде с резервуаром через жидкостный канал жидкостного коллектора, а воздушная форсунка сообщается по текучей среде с впускным отверстием для воздуха через воздушный канал воздушного коллектора. Воздушный канал разъединен по текучей среде с жидкостным каналом.
[00014] В некоторых вариантах осуществления очистительной системы воздушный канал имеет дальний конец и ближний конец. Ближний конец по текучей среде соединен с впускным отверстием для воздуха. Дальний конец формирует (i) основную камеру для обеспечения воздуха в воздушную форсунку и (ii) вторичную камеру для обеспечения воздуха в отклоняющее отверстие.
[00015] В некоторых вариантах осуществления очистительной системы сенсорная система имеет корпус, который имеет: нижнюю пластину, прикрепленную к поверхности SDC; одну или более стенок, соединяющих нижнюю пластину с верхней пластиной, причем поверхность сенсорной системы расположена внутри корпуса и обращена наружу к одной или более стенкам; и верхнюю пластину, образующую воздушный канал и жидкостный канал. Блок подачи расположен на краю верхней пластины и ориентирован для подачи воздушной струи и жидкостной струи к поверхности сенсорной системы.
[00016] В некоторых вариантах осуществления очистительной системы поверхность SDC представляет собой поверхность, по меньшей мере, одного из: крыши, передней решетки и боковой двери SDC.
[00017] В другом широком аспекте настоящего изобретения предложен способ очистки поверхности сенсорной системы. Способ выполняется очистительной системой, содержащей блок подачи и контроллер. Блок подачи включает в себя жидкостную форсунку, воздушную форсунку, расположенную вблизи воздушной форсунки, и отклоняющее отверстие, сообщающееся по текучей среде с воздушной форсункой. Способ содержит подачу посредством жидкостной форсунки жидкостной струи, направленной к поверхности сенсорной системы, подачу посредством воздушной форсунки воздушной струи, направленной к поверхности сенсорной системы, и подачу посредством отклоняющего отверстия другой воздушной струи, направленной от воздушной форсунки и поверхности сенсорной системы. Подача воздушной струи осуществляется одновременно с подачей другой воздушной струи.
[00018] В некоторых вариантах осуществления способа подача жидкостной струи осуществляется в течение фазы подачи жидкости заданного цикла очистки, а подача воздушной струи и другой воздушной струи осуществляется в течение фазы подачи воздуха заданного цикла очистки. Способ содержит осуществление множества циклов очистки, включающих в себя заданный цикл очистки.
[00019] В некоторых вариантах осуществления способа фаза подачи воздуха заданного цикла очистки осуществляется сразу после фазы подачи жидкости заданного цикла очистки.
[00020] В некоторых вариантах осуществления способа временной интервал фазы подачи жидкости заданного цикла очистки, по меньшей мере, частично перекрывается с другим временным интервалом фазы подачи воздуха заданного цикла очистки.
[00021] В некоторых вариантах осуществления способа заданный цикл очистки дополнительно имеет промежуточную фазу между фазой подачи жидкости и фазой подачи воздуха. Промежуточная фаза предназначена для задержки фазы подачи воздуха после осуществления фазы подачи жидкости.
[00022] В некоторых вариантах осуществления способа заданный цикл очистки дополнительно имеет другую фазу подачи жидкости.
[00023] В некоторых вариантах осуществления способа заданный цикл очистки дополнительно имеет другую фазу подачи воздуха.
[00024] В некоторых вариантах осуществления способа количество циклов очистки в множестве циклов очистки предварительно определено оператором очистительной системы.
[00025] В некоторых вариантах осуществления способа способ дополнительно содержит отслеживание посредством контроллера показателя загрязнения поверхности сенсорной системы и в ответ на определение контроллером того, что показатель загрязнения ниже предварительно определенного порогового значения, остановку посредством контроллера эксплуатации блока подачи.
[00026] В контексте настоящего описания термин «источник света» в широком смысле относится к любому устройству, выполненному с возможностью испускания излучения, такого как сигнал излучения в форме луча, например, без ограничения, луч света, включающий в себя излучение одной или более соответственных длин волн в электромагнитном спектре. В одном примере источником света может быть «лазерный источник». Таким образом, источник света может включать в себя лазер, такой как твердотельный лазер, лазерный диод, лазер высокой мощности, или альтернативный источник света, такой как источник света на основе светоизлучающих диодов (LED). Некоторые (не накладывающие ограничений) примеры лазерного источника включают в себя: лазерный диод Фабри-Перо, лазер с квантовыми ямами, лазер с распределенным брэгговским отражателем (DBR), лазер с распределенной обратной связью (DFB), волоконный лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL). Кроме того, лазерный источник может испускать световые лучи в различных форматах, таких как световые импульсы, непрерывные волны (CW), квазинепрерывные волны и так далее. В некоторых не накладывающих ограничений примерах лазерный источник может включать в себя лазерный диод, выполненный с возможностью излучения света с длиной волны от примерно 650 нм до 1150 нм. В качестве альтернативы, источник света может включать в себя лазерный диод, выполненный с возможностью излучения световых лучей с длиной волны от примерно 800 нм до примерно 1000 нм, от примерно 850 нм до примерно 950 нм, от примерно 1300 нм до примерно 1600 нм или в любом другом подходящем диапазоне. Пока не указано иное, термин «примерно» применительно к числовому значению определяется как отклонение до 10% от указанного значения.
[00027] В контексте настоящего описания «выходной луч» может также называться лучом излучения, таким как луч света, который создается источником излучения и направлен по излучению в сторону интересующей области. Выходной луч может иметь один или более параметров, таких как: длительность луча, угловая дисперсия луча, длина волны, мгновенная мощность, плотность фотонов на разных расстояниях от источника света, средняя мощность, интенсивность мощности луча, ширина луча, частота повторения луча, последовательность лучей, коэффициент заполнения импульса, длина волны или фаза и т.д. Выходной луч может быть неполяризованным или произвольно поляризованным, может не иметь конкретной или фиксированной поляризации (например, поляризация может меняться со временем) или может иметь конкретную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[00028] В контексте настоящего описания «входной луч» - это излучение или свет, попадающий в систему, обычно после отражения от одного или более объектов в интересующей области (ROI). «Входной луч» также может называться лучом излучения или световым лучом. Под отражением подразумевается то, что, по меньшей мере, часть выходного луча, падающего на один или более объектов в ROI, отражается от одного или более объектов. Входной луч может иметь один или более параметров, таких как: время пролета (то есть время от излучения до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность во всем отраженном импульсе и распределение фотонов/сигнал в периоде отраженного импульса и т.д. В зависимости от конкретного использования, некоторое излучение или свет, собранный во входном луче, может быть от источников, отличных от отраженного выходного луча. Например, по меньшей мере, некоторая часть входного луча может включать в себя световой шум из окружающей среды (включая рассеянный солнечный свет) или другие источники света, внешние по отношению к настоящей системе.
[00029] В контексте настоящего описания термин «окружающая обстановка» заданного транспортного средства относится к области или объему вокруг заданного транспортного средства, включая часть его текущего окружения, доступную для сканирования с использованием одного или более сенсоров, установленных на данном транспортном средстве, например, для создания трехмерной карты такой окружающей обстановки или обнаружения в ней объектов.
[00030] В контексте настоящего описания «Интересующая область» (ROI) может в широком смысле включать в себя часть наблюдаемого окружения системы LiDAR, в которой один или более объектов могут быть обнаружены. Следует отметить, что на интересующую область системы LiDAR могут влиять различные условия, такие как, но не ограничиваясь ими: ориентация системы LiDAR (например, направление оптической оси системы LiDAR); положение системы LiDAR по отношению к окружающей обстановке (например, расстояние над землей и прилегающий рельеф местности и препятствия); рабочие параметры системы LiDAR (например, мощность излучения, вычислительные настройки, заданные углы эксплуатации) и т.д. ROI системы LIDAR может быть образована, например, плоским углом или телесным углом. В одном примере ROI также может быть образована в пределах конкретной дальности действия (например, до 200 м или около того).
[00031] В контексте настоящего описания «сервер» - это компьютерная программа, которая функционирует на соответствующем аппаратном обеспечении и способна принимать запросы (например, от электронных устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. Аппаратное обеспечение может быть реализовано как один физический компьютер или одна физическая компьютерная система, но ни то, ни другое не является обязательным в отношении настоящего изобретения. В данном контексте использование выражения «сервер» не предназначено для обозначения того, что каждая задача (например, принятые инструкции или запросы) или любая конкретная задача будет принята, выполнена или вызвана к выполнению одним и тем же сервером (то есть одним и тем же программным обеспечением и/или аппаратным обеспечением); а означает, что любое количество программных элементов или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или предписание выполнения любой задачи или запроса или последствий любой задачи или запроса; и все это программное и аппаратное обеспечение может быть одним сервером или множеством серверами, оба случая из которых включены в выражение «по меньшей мере один сервер».
[00032] В контексте настоящего описания «электронное устройство» - это любое компьютерное оборудование, которое способно запускать программное обеспечение, подходящее для соответствующей решаемой задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать как сервер для других электронных устройств, однако это не обязательно в отношении настоящего изобретения. Таким образом, некоторые (не накладывающие ограничений) примеры электронных устройств включают в себя беспилотные устройства, персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств.
[00033] В контексте настоящего описания выражение «информация» включает в себя информацию любого характера или вида, которая может быть сохранена в базе данных. Таким образом, информация включает в себя, помимо прочего, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, данные о погоде, данные о трафике, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[00034] В контексте настоящего описания «база данных» представляет собой любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерного оборудования, на котором данные хранятся, реализуются или иным образом предоставляются для использования. База данных может находиться на том же оборудовании, что и процесс, который хранит или использует информацию, хранящуюся в базе данных, или она может находиться на отдельном оборудовании, например на выделенном сервере или множестве серверов.
[00035] В контексте настоящего описания слова «первый», «второй», «третий» и т.д. используются в качестве прилагательных только с целью обеспечения различия между существительными, на которые они изменяются друг от друга, а не для цели описания каких-либо конкретных отношений между этими существительными. Кроме того, как обсуждается здесь в других контекстах, ссылка на «первый» элемент и «второй» элемент не препятствует тому, чтобы эти два элемента были одним и тем же фактическим элементом реального мира.
[00036] Каждый из вариантов реализации настоящего изобретения обладает по меньшей мере одним из вышеупомянутых аспектов и/или цели, но не обязательно имеет их все. Следует понимать, что некоторые аспекты настоящего изобретения, которые возникнут в попытке достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или удовлетворять другим целям, которые не описаны в данном документе явным образом.
[00037] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов реализации настоящего изобретения станут очевидными из нижеследующего описания, сопроводительных чертежей и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00038] Эти и другие признаки, аспекты и преимущества настоящего изобретения станут более понятными из нижеследующего описания, прилагаемой формулы изобретения и сопроводительных чертежей, на которых:
[00039] Фиг.1 представляет собой схематическое представление примерной компьютерной системы, выполненной с возможностью реализации некоторых не накладывающих ограничений вариантов осуществления настоящего изобретения.
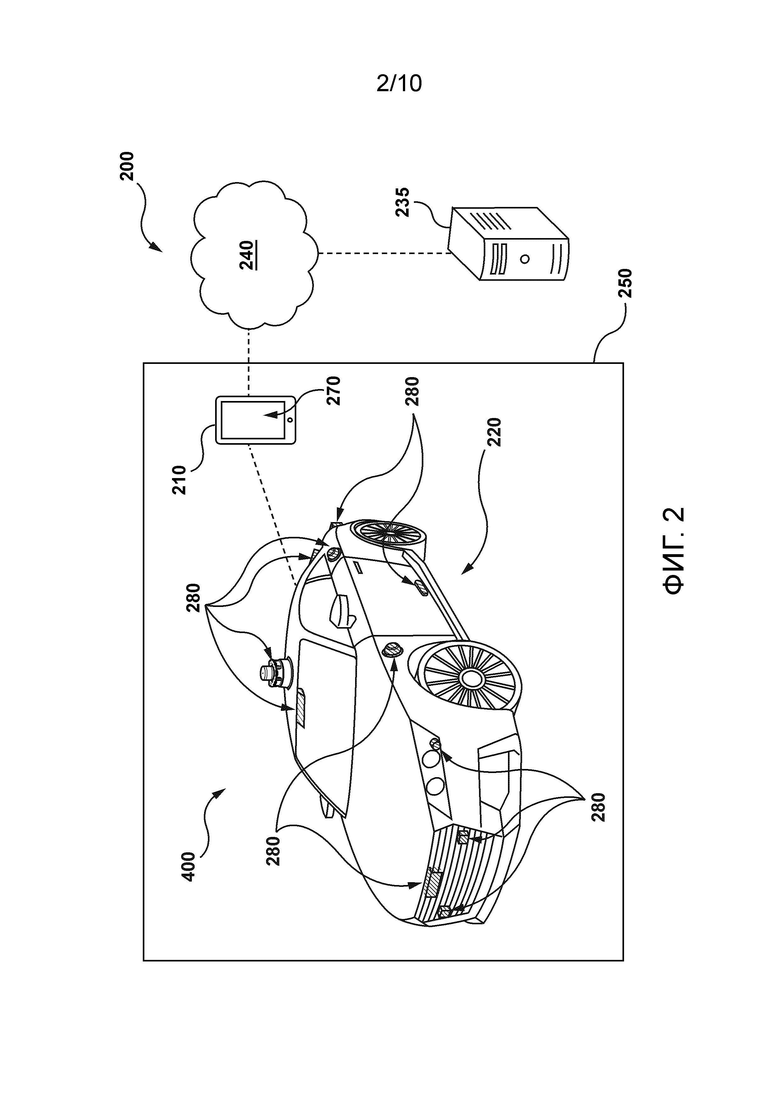
[00040] Фиг.2 представляет собой принципиальную схему сетевой вычислительной среды, подходящей для использования с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
[00041] Фиг.3 представляет собой схематическую диаграмму очистительной системы, реализованной в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
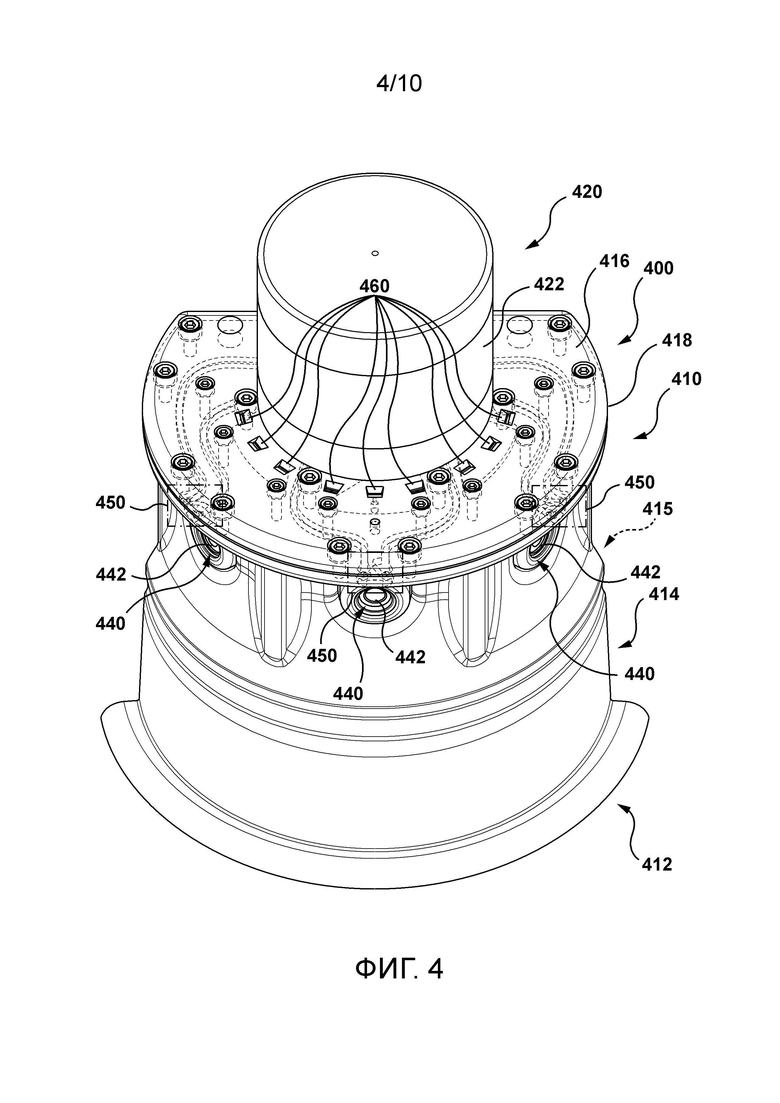
[00042] Фиг.4 представляет собой вид спереди в перспективе сверху корпуса, имеющего камерные сенсоры и нижележащую верхнюю пластину, как реализовано в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
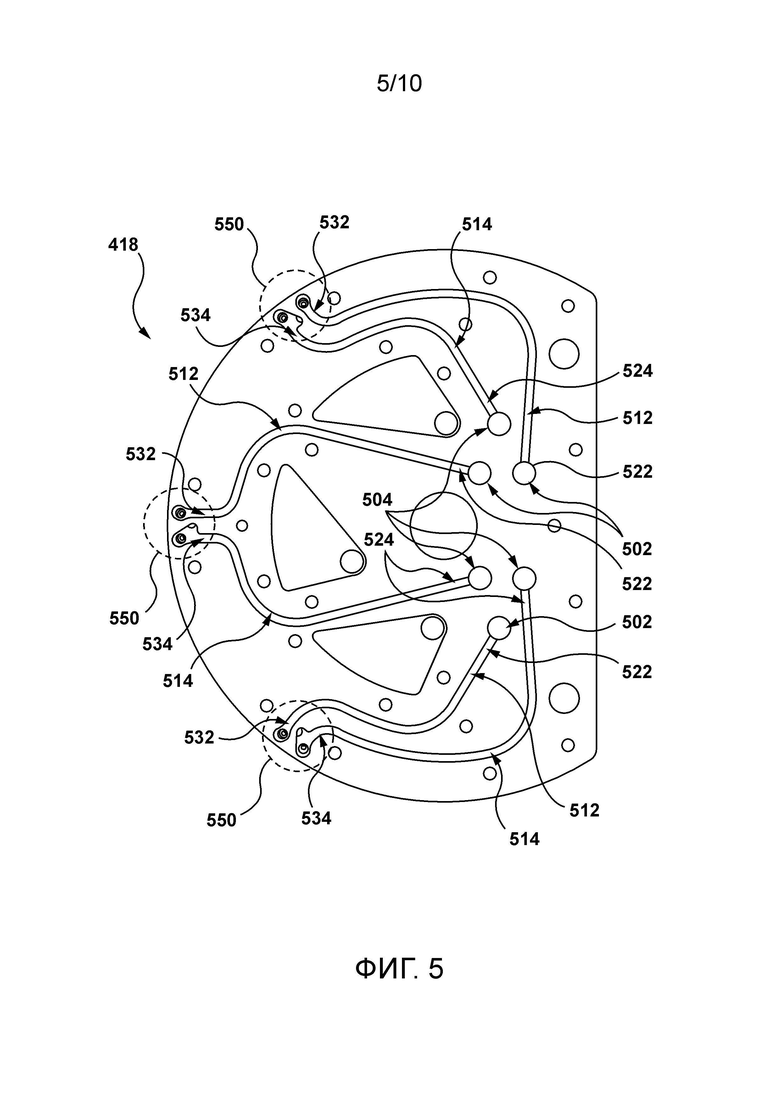
[00043] Фиг.5 представляет собой вид сверху нижележащей верхней пластины с Фиг.4 в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
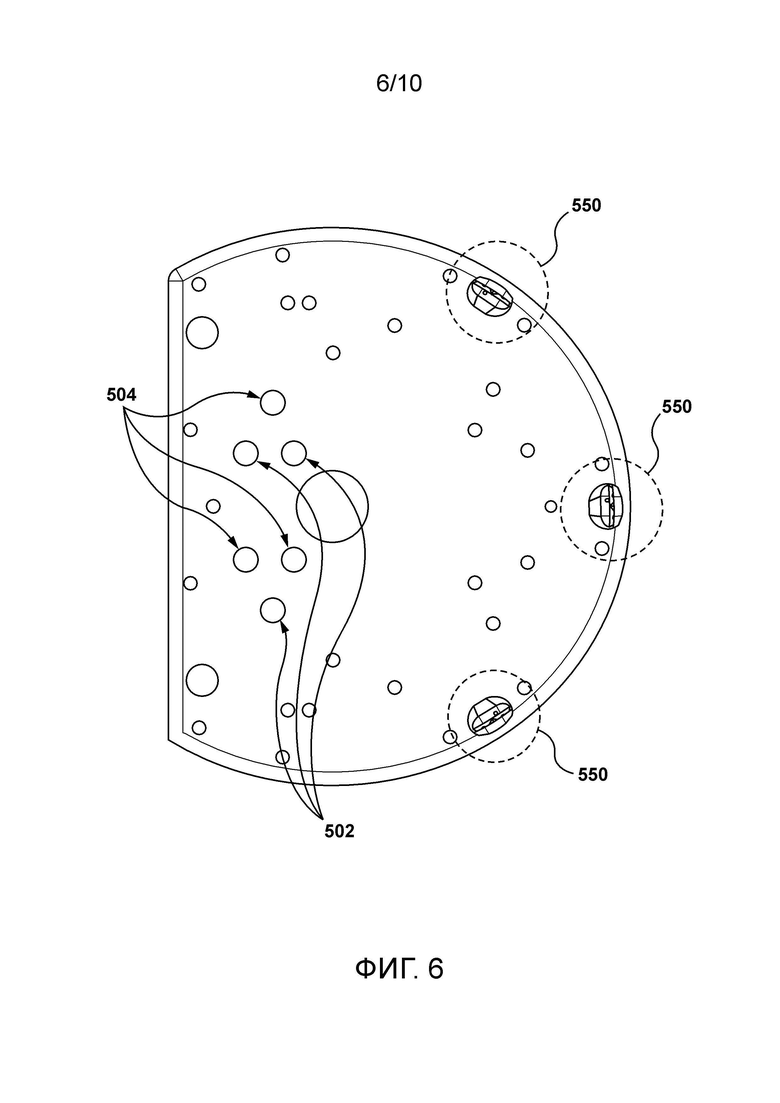
[00044] Фиг.6 представляет собой вид снизу нижележащей верхней пластины с Фиг.4 в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
[00045] Фиг.7 представляет собой увеличенный вид сверху слева в перспективе области подачи нижележащей верхней пластины с Фиг.4 в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
[00046] Фиг.8 представляет собой вид в разрезе по линии 8-8 с Фиг.7 области подачи с Фиг.7 в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
[00047] На Фиг.9 изображен набор видов, иллюстрирующих фазу подачи жидкости и фазу подачи воздуха цикла очистки очистительной системы с фиг.3 в соответствии с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения.
[00048] На Фиг.10 представлена блок-схема последовательности операций, иллюстрирующая пример способа очистки поверхности сенсорной системы SDC.
Подробное описание
[00049] Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящего изобретения, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящего изобретения и включаются в ее суть и объем.
[00050] Кроме того, нижеследующее описание может описывать варианты реализации настоящего изобретения в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные варианты реализации настоящего изобретения могут иметь большую сложность.
[00051] В некоторых случаях также могут быть изложены примеры модификаций настоящего изобретения, которые считаются полезными. Это делается лишь для содействия пониманию и, опять же, не для строгого определения объема или очерчивания границ настоящего изобретения. Эти модификации не являются исчерпывающим списком, и специалист в данной области может осуществлять другие модификации, все еще оставаясь при этом в рамках объема настоящего изобретения. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единым вариантом реализации такого элемента настоящего изобретения.
[00052] Более того, все утверждения в данном документе, излагающие принципы, аспекты и варианты реализации настоящего изобретения, а также их конкретные примеры, подразумеваются охватывающими как их структурные, так и функциональные эквиваленты, независимо от того, известны ли они в настоящее время или будут разработаны в будущем. Таким образом, например, специалисты в данной области осознают, что любые блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, воплощающей принципы настоящего изобретения. Аналогичным образом, будет понятно, что любые блок-схемы, схемы последовательности операций, схемы изменения состояний, псевдокоды и подобное представляют различные процессы, которые могут быть по сути представлены на машиночитаемых носителях и исполнены компьютером или процессором вне зависимости от того, показан такой компьютер или процессор явным образом или нет.
[00053] Функции различных элементов, показанных на фигурах, включая любой функциональный блок, обозначенный как «процессор», могут быть обеспечены за счет использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение в сочетании с соответствующим программным обеспечением. При осуществлении процессором функции могут быть предоставлены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как относящееся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и может в неявной форме включать в себя, без ограничений, аппаратное обеспечение цифрового сигнального процессора (DSP), сетевой процессор, интегральную схему специального назначения (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянное запоминающее устройство (ROM) для хранения программного обеспечения, запоминающее устройство произвольного доступа (RAM) и энергонезависимое (долговременное) хранилище. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав вышеуказанного.
[00054] Программные модули, или просто модули, в качестве которых может подразумеваться программное обеспечение, могут быть представлены в настоящем документе как любое сочетание элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса и/или текстовое описание. Такие модули могут выполняться аппаратным обеспечением, которое показано явно или неявно.
[00055] Учитывая эти основополагающие вещи, рассмотрим некоторые не накладывающие ограничений примеры, чтобы проиллюстрировать различные варианты реализации аспектов настоящего изобретения.
Компьютерная система
[00056] Сначала обратимся к Фиг.1, на которой изображена схематическая диаграмма компьютерной системы 100, подходящей для использования с некоторыми вариантами реализации настоящего изобретения. Компьютерная система 100 включает в себя различные аппаратные компоненты, включающие в себя один или более одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельным накопителем 120 и памятью 130, которая может быть памятью с произвольным доступом или любым другим типом запоминающего устройства.
[00057] Связь между различными компонентами компьютерной системы 100 может быть обеспечена посредством одной или более внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной Firewire IEEE 1394, шиной SCSI, Serial-ATA шина и т.д.), с которой различные компоненты оборудования связаны через электронику. Согласно вариантам осуществления настоящего изобретения твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и выполнения процессором 110 для определения присутствия объекта. Например, программные инструкции могут быть частью приложения управления транспортным средством, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может иметь дополнительные и/или необязательные компоненты (не показаны), такие как модули сетевой связи, модули локализации и т.п.
Сетевая вычислительная среда
[00058] На Фиг.2 изображена сетевая вычислительная среда 200, подходящая для использования с некоторыми не накладывающими ограничений вариантами осуществления настоящего изобретения. Сетевая вычислительная среда 200 включает в себя электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не изображенным), который связан с транспортным средством 220 (например, с оператором транспортного средства 220). Среда 200 также включает в себя сервер 235, осуществляющий связь с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как будет более подробно описано ниже).
[00059] По меньшей мере, в некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения электронное устройство 210 коммуникативно связано с системами управления транспортного средства 220. Электронное устройство 210 может быть выполнено с возможностью управления различными операционными системами транспортного средства 220, включая, помимо прочего: ECU (блок управления двигателем), системы рулевого управления, тормозные системы, а также системы сигнализации и освещения (т.е. фары, стоп-сигналы, и/или указатели поворота). В таком варианте осуществления транспортное средство 220 может быть беспилотным транспортным средством 220.
[00060] В некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения сетевая вычислительная среда 200 может включать в себя спутник GPS (не показан), передающий и/или принимающий сигнал GPS в/от электронного устройства 210. Следует понимать, что настоящее изобретение не ограничивается GPS и может использовать технологию определения местоположения, отличную от GPS. Следует отметить, что спутник GPS можно вообще не использовать.
[00061] Транспортное средство 220, с которым связано электронное устройство 210, может быть любым транспортным средством для отдыха или иного, например, частным или коммерческим автомобилем, грузовиком, мотоциклом и т.п. Хотя транспортное средство 220 изображено как наземное транспортное средство, это может быть не так во всех без исключения не накладывающих ограничений вариантах осуществления настоящего изобретения. Например, в некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения транспортное средство 220 может быть водным транспортным средством, таким как лодка, или летательным аппаратом, например, летающим дроном.
[00062] Транспортное средство 220 может управляться пользователем или быть транспортным средством без водителя. В некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения предполагается, что транспортное средство 220 может быть реализовано как беспилотный автомобиль (SDC). Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, эти конкретные параметры включают в себя, например: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства и объем двигателя.
[00063] Согласно настоящему изобретению реализация электронного устройства 210 особо не ограничивается. Например, электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, центральный процессор транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет, персональный компьютер, встроенный в транспортное средство 220, и т.п. Таким образом, следует отметить, что электронное устройство 210 может быть или может не быть постоянно связано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления электронное устройство 210 имеет дисплей 270.
[00064] Электронное устройство 210 может включать в себя некоторые или все компоненты компьютерной системы 100, изображенной на Фиг.1, в зависимости от конкретного варианта осуществления. В некоторых вариантах осуществления электронное устройство 210 представляет собой бортовое компьютерное устройство и включает в себя процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 включает в себя аппаратное обеспечение, и/или программное обеспечение, и/или микропрограммное обеспечение, или их сочетание для обработки данных, как будет более подробно описано ниже.
[00065] В некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения сеть 240 связи представляет собой Интернет. В альтернативных не накладывающих ограничений вариантах осуществления настоящего изобретения сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что варианты реализации сети 240 связи приведены только в целях иллюстрации. Между электронным устройством 210 и сетью 240 связи предоставляется канал связи (отдельно не пронумерованный), вариант реализация которого будет зависеть, среди прочего, от того, как реализовано электронное устройство 210. Просто в качестве примера, а не ограничения, в тех не накладывающих ограничений вариантах осуществления настоящего изобретения, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или навигационное устройство, канал связи может быть реализован как линия беспроводной связи. Примеры линий беспроводной связи могут включать в себя, без ограничения, линию связи сети 3G, линию связи 4G и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
[00066] В некоторых вариантах осуществления настоящего изобретения сервер 235 реализован как компьютерный сервер и может включать в себя некоторые или все компоненты компьютерной системы 100 с Фиг.1. В одном не накладывающим ограничений примере сервер 235 реализован как сервер Dell™ PowerEdge™, работающий под управлением операционной системы Microsoft™ Windows Server™, но также может быть реализован в любом другом подходящем оборудовании, программном обеспечении и/или встроенном программном обеспечении или их сочетании. В проиллюстрированном не накладывающим ограничений варианте осуществления настоящего изобретения сервер 235 является единым сервером. В альтернативных не накладывающих ограничений вариантах осуществления настоящего изобретения функциональные возможности сервера 235 могут быть распределены и могут быть реализованы через множество серверов (не показаны).
[00067] В некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения процессор 110 электронного устройства 210 может осуществлять связь с сервером 235 для приема одного или более обновлений. Такие обновления могут включать в себя, помимо прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и т.п. В некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения процессор 110 также может быть выполнен с возможностью осуществления передачи на сервер 235 конкретные рабочие данные, такие как проезжаемые маршруты, данные о трафике, данные об эксплуатации и т.п. Некоторые или все такие данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или анонимизированы.
[00068] Следует отметить, что электронное устройство 210 может использовать различные сенсоры и системы для сбора информации об окружающей остановке 250 транспортного средства 220. Как видно на Фиг.2, транспортное средство 220 может быть оборудовано множеством сенсорных систем 280. Следует отметить, что различные сенсорные системы из множества сенсорных систем 280 могут использоваться для сбора различных типов данных, касающихся окружающей остановке 250 транспортного средства 220.
[00069] В одном примере множество сенсорных систем 280 может включать в себя различные оптические системы, включающие в себя, среди прочего, одну или более сенсорных систем камерного типа, которые установлены на транспортном средстве 220 и коммуникативно связаны с процессором 110 электронного устройства 210. Вообще говоря, одна или более сенсорных систем камерного типа могут быть выполнены с возможностью сбора данных изображения о различных частях окружающей обстановки 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или более сенсорными системами камерного типа, могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может быть выполнено с возможностью подачи данных изображения, предоставленных одной или более сенсорными системами камерного типа, в нейронную сеть обнаружения объектов (ODNN), которая обучена локализовать и классифицировать потенциальные объекты в окружающей обстановке 250 транспортного средства 220.
[00070] В другом примере множество сенсорных систем 280 может включать в себя одну или более сенсорных систем радарного типа, которые установлены на транспортном средстве 220 и связаны с возможностью осуществления связи с процессором 110. Вообще говоря, одна или более сенсорных систем радарного типа могут быть выполнены с возможностью использования радиоволн для сбора данных о различных частях окружающей обстановки 250 транспортного средства 220. Например, одна или более сенсорных систем радарного типа могут быть выполнены с возможностью сбора радарных данных о потенциальных объектах в окружающей обстановке 250 транспортного средства 220, такие данные потенциально представляют расстояние объектов от сенсорной системы радарного типа, ориентацию объектов, быстроты и/или скорости объектов и т.п.
[00071] В дополнительном примере множество сенсорных систем 280 может включать в себя одну или более систем обнаружения и определения дальности (LIDAR), которые установлены на транспортном средстве 220 и коммуникативно связаны с процессором 110. Вообще говоря, система LIDAR выполнена с возможностью сбора данных об окружающей обстановке 250 транспортного средства 220, используемых, например, для построения многомерной карты объектов в окружающей обстановке 250 транспортного средства 220. Система LIDAR может быть установлена или модернизирована на транспортном средстве 220 в различных местах и/или в различных выполнениях для сбора информации об окружающей обстановке 250 транспортного средства 220.
[00072] Например, в зависимости от реализации транспортного средства 220 и системы LIDAR, система LIDAR может быть установлена на внутренней, верхней части лобового стекла транспортного средства 220. Тем не менее, другие места для установки лидарной системы входят в объем настоящего раскрытия, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке, переднем бампере или сбоку транспортного средства 220.
Предусмотренный корпус
[00073] Следует отметить, что система LIDAR может быть установлена совместно с одной или более камерными системами в предусмотренном корпусе, установленном на верхней части транспортного средства 220.
[00074] Вкратце обратимся к Фиг.4, на которой изображен вид спереди в перспективе сверху корпуса 410 предусмотренного корпуса. Вообще говоря, корпус 410 имеет нижнюю пластину 412, боковую стенку 414, заднюю стенку 415 и верхние пластины 416 и 418. В некоторых вариантах осуществления настоящего изобретения боковая стенка 414 может быть изогнутой стенкой.
[00075] Нижняя пластина 412 предназначена для крепления корпуса 410 к поверхности транспортного средства 220 (например, к верхней поверхности крыши). Боковая стенка 414 и задняя стенка 415 соединяют нижнюю пластину 412 с верхними пластинами 416 и 418. Боковая стенка 414 имеет множество отверстий (не пронумерованы) для позиционирования сенсорных поверхностей 442 камерных сенсорных систем 440. Следует отметить, что корпус 410 образует внутреннее пространство для размещения в нем, среди прочего, камерных сенсорных систем 440. В не накладывающем ограничений примере с Фиг.4 камерные сенсорные системы 440 размещены в корпусе 410 таким образом, что сенсорные поверхности 442 совмещены с соответственными отверстиями в боковой стенке 414. Можно сказать, что отверстия в боковой стенке 414 расположены для увеличения объединенного поля обзора камерных сенсорных систем 440. Можно сказать, что камерные сенсорные системы 440 разнесены так, чтобы увеличивать поле обзора.
[00076] В других вариантах осуществления, вместо боковой стенки 414 и задней стенки 415, корпус 410 может иметь только одну целостно цилиндрическую стенку. В таком варианте исполнения предполагается, что дополнительные камерные сенсорные системы могут быть размещены в корпусе 410 для увеличения объединенного поля обзора камерных сенсорных систем 440. В других вариантах осуществления корпус 410 может иметь множество стенок, имеющих другое геометрическое выполнение. Следует отметить, что количество стенок корпуса 410 и их форма могут зависеть, среди прочего, от конкретных вариантов реализации настоящего изобретения.
[00077] Как упомянуто выше, корпус 410 имеет (i) нижележащую верхнюю пластину 418, прикрепленную к боковой стенке 414 и задней стенке 415, и (ii) вышележащую верхнюю пластину 416, прикрепленную к нижележащей верхней пластине 418. Следует отметить, что нижележащая верхняя пластина 418 и вышележащая верхняя пластина 416 имеют изогнутый край. Боковая стенка 414 соединена с нижней поверхностью нижележащей верхней пластины 418 вблизи изогнутого края нижележащей верхней пластины 418. Система 420 LIDAR прикреплена к вышележащей верхней пластине 416 и имеет сенсорную поверхность 422. Вышележащая верхняя пластина 416 и нижележащая верхняя пластина 418 разделены прокладкой (не пронумерована). В некоторых вариантах осуществления настоящего изобретения нижележащая верхняя пластина 418 и вышележащая верхняя пластина 416 могут быть выполнены как единое целое.
[00078] В течение эксплуатации транспортного средства 220 одна или более сенсорных поверхностей 442 и 422 могут стать, по меньшей мере, частично загрязненными из-за одного или более погодных факторов. Например, дождь и грязь могут закрывать одну или более сенсорных поверхностей, что снижает качество информации, предоставляемой камерными сенсорами 440 и/или сенсором 420 LIDAR. Разработчики настоящего изобретения разработали очистительную систему 300 (схематически изображенную на Фиг.3) для очистки одной или более поверхностей сенсорных систем. Очистительная система 300 выполнена с возможностью подачи очистительной жидкости и воздуха на одну или более поверхностей сенсорных систем для целей очистки.
[00079] Как можно видеть на Фиг.4, нижележащая верхняя пластина 418 включает в себя множество блоков 450 подачи для подачи жидкости и воздуха на соответственные из множества очищаемых поверхностей 442, а вышележащая верхняя пластина 416 включает в себя множество блоков 460 подачи для подача жидкости и воздуха на поверхность 422 сенсора 420 LIDAR. Блоки 450 подачи являются частью очистительной системы 300.
[00080] Теперь по очереди будет обсуждено то, как очистительная система 300 может быть реализована в некоторых вариантах осуществления настоящего изобретения для очистки одной или более сенсорных поверхностей и как нижележащая верхняя пластина 418 может быть выполнена с возможностью реализации, среди прочего, множества блоков 450 подачи очистительной системы 300.
Очистительная система
[00081] На Фиг.3 схематически изображена очистительная система 300. Очистительная система 300 содержит множество блоков 450 подачи (также видно на Фиг.4), резервуар 302 для содержания очистительной жидкости, впускное отверстие 304 для воздуха для обеспечения источника воздуха и подсистему 306 управления для обеспечения сообщения по текучей среде между резервуаром 302, впускным отверстием 304 для воздуха и множеством блоков 450 подачи, и для управления очистительной системой 300.
[00082] Подсистема 306 управления включает в себя жидкостной коллектор 320 для направления жидкости из резервуара 302 во множество блоков 450 подачи и жидкостной компрессор 330 для нагнетания жидкости через жидкостной коллектор 320. Кроме того, подсистема 306 управления включает в себя воздушный коллектор 340 для направления воздуха из впускного отверстия 304 для воздуха в множество блоков 450 подачи и воздушный компрессор 350 для нагнетания воздуха через воздушный коллектор 340.
[00083] Подсистема 306 управления также имеет контроллер 310, который может включать в себя один или более процессоров, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA) и/или другие подходящие схемы. Контроллер 310 также может включать в себя энергонезависимую машиночитаемую память для хранения инструкций, выполняемых контроллером 310, а также данных, которые контроллер 310 может генерировать на основе сигналов, полученных от других внутренних компонентов сенсорных систем, и/или может предоставлять сигналы в другие внутренние компоненты сенсорных систем. Память может включать в себя энергозависимые (например, RAM) и/или энергонезависимые (например, флэш-память, жесткий диск) компоненты. Контроллер 310 может быть выполнен с возможностью формирования данных в течение эксплуатации и сохранения их. Например, эти данные, создаваемые контроллером 310, могут использоваться для запуска очистки одной или более сенсорных поверхностей очистительной системой 300. Предполагается, что по меньшей мере в некоторых не накладывающих ограничений вариантах осуществления настоящего изобретения контроллер 310 может быть реализован способом, аналогичным реализации электронного устройства 210 и/или компьютерной системы 100, не выходя за рамки объема настоящего изобретения.
[00084] Разработчики настоящего изобретения поняли, что блоки 450 подачи очистительной системы 300 должны быть компактными по размеру из-за геометрических и весовых требований к корпусу 410 и/или одной или более сенсорных систем, размещенных в нем. В одном примере блок 450 подачи должен быть достаточно компактным, чтобы обеспечивать как воздух, так и жидкость на соответственную сенсорную поверхность 442. В проиллюстрированном примере сенсорная поверхность 442 заданной камерной сенсорной системы 440 имеет площадь поверхности 24,5 мм2. Например, окно камеры может иметь диаметр 17,5 мм. Как будет описано ниже более подробно, проектирование и реализация компактного блока подачи является сложной задачей из-за непосредственной близости жидкостной и воздушной струй в течение эксплуатации очистительной системы 300 и, таким образом, потенциального «засорения» воздушного потока оставшейся жидкостью.
[00085] Как упоминалось ранее, нижележащая верхняя пластина 418 образует и/или вмещает в себя, по меньшей мере, некоторые компоненты очистительной системы 300. Теперь будет обсуждено, как нижележащая верхняя пластина 418 выполнена с возможностью образования и/или вмещения в себе, по меньшей мере, некоторых компонентов очистительной системы 300.
Нижележащая верхняя пластина
[00086] На обеих Фиг.5 и 6 изображены вид сверху и вид снизу, соответственно, нижележащей верхней пластины 418. Нижележащая верхняя пластина 418 имеет впускные отверстия 502 для жидкости и впускные отверстия 504 для воздуха. Жидкостные каналы 512 и воздушные каналы 514 образованы на верхней поверхности нижележащей верхней пластины 418. Впускные отверстия 502 для жидкости обеспечивают сообщение по текучей среде между соответственными жидкостными каналами 512 и остальной частью жидкостного коллектора 320 очистительной системы 300. Жидкостные каналы 512 направляют очистительную жидкость из соответственных впускных отверстий 502 для жидкости к соответственным блокам 450 подачи. Впускные отверстия 504 для воздуха обеспечивают сообщение по текучей среде между соответственными воздушными каналами 514 и остальной частью воздушного коллектора 340 очистительной системы 300. Воздушный каналы 514 направляют воздух из соответственных впускных отверстий 504 для воздуха к соответственным блокам 450 подачи. В одном не накладывающем ограничений примере корпус 410 обеспечивает внутреннее пространство для каналов жидкостного сообщения и каналов воздушного сообщения, которые направляют очистительную жидкость к впускным отверстиям 502 для жидкости и воздух к впускным отверстиям 504 для воздуха соответственно.
[00087] Предполагается, что жидкостные каналы 512, образованные в нижележащей верхней пластине 418, могут быть частью жидкостного коллектора 320 очистительной системы 300, и что воздушный каналы 514, образованные в нижележащей верхней пластине 418, могут быть частью воздушного коллектора 340 очистительной системы 300. Следует также отметить, что жидкостные каналы 512 и воздушные каналы 514 не сообщаются по текучей среде друг с другом. Другими словами, жидкостные каналы 512 предназначены для направления очистительной жидкости очистительной системы 300, а воздушные каналы предназначены для направления воздуха очистительной системы 300.
[00088] Нижележащая верхняя пластина 418 также имеет некоторое количество областей 550 подачи, каждая из которых включает в себя соответственный блок 450 подачи. Области 550 подачи расположены вблизи изогнутого края нижележащей верхней пластины 418 и расположены на нижележащей верхней пластине 418 так, чтобы совпадать с соответственными сенсорными поверхностями 442 на боковой стенке 414. Количество областей 550 подачи зависит от количества сенсорных поверхностей 442 камерных сенсорных систем 440 в корпусе 410.
[00089] Следует отметить, что жидкостные каналы 512 имеют соответственные ближние концы 522, которые по текучей среде связаны с соответственными впускными отверстиями 502 для жидкости, и имеют соответственные дальние концы 532, которые расположены в соответственных областях 550 подачи. Точно так же воздушный каналы 514 имеют соответственные ближние концы 524, которые по текучей среде связаны с соответственными впускными отверстиями 504 для воздуха, и имеют соответственные дальние концы 534, которые расположены в соответственных областях 550 подачи.
Область подачи и блок подачи
[00090] Чтобы лучше проиллюстрировать заданную область 550 подачи, включающую в себя соответственный блок 450 подачи, теперь будет сделана ссылка на Фиг.7, на которой показан вид в перспективе слева сверху нижележащей верхней пластины 418 и увеличенный вид заданной области 550 подачи.
[00091] Как видно, дальний конец 532 жидкостного канала 512 расположен в области 550 подачи и заканчивается в жидкостной камере 708, образованной на верхней поверхности нижележащей верхней пластины 418. Жидкостная форсунка 730 расположена в области 550 подачи нижележащей верхней пластины 418 и выполнена с возможностью подачи жидкости из жидкостной камеры 708. Жидкостная камера 708 предназначена для обеспечения постоянного давления жидкости в течение эксплуатации очистительной системы 300.
[00092] Кроме того, дальний конец 534 воздушного канала 514 расположен в области 550 подачи и заканчивается в основной камере 702 и вторичной камере 704, образованных на верхней поверхности нижележащей верхней пластины 418. Как видно, дальний конец 534 имеет изогнутый угол 706, который помогает образовывать вторичную камеру 704 в дополнение к основной камере 702. Воздушная форсунка 710 расположена в области 550 подачи нижележащей верхней пластины 418 и выполнена с возможностью подачи воздуха из основной камеры 702. Отклоняющее отверстие 720 расположено в области 550 подачи нижележащей верхней пластины 418 и выполнено с возможностью подачи воздуха из вторичной камеры 704. Основная камера 702 предназначена для обеспечения постоянного давления воздуха, подаваемого через воздушную форсунку 710 в течение эксплуатации очистительной системы 300. Вторичная камера 704 предназначена для предотвращения турбулентности и обеспечения соответствующего давления воздуха, подаваемого через отклоняющее отверстие 720. Предполагается, что изогнутый угол 706 может помочь в уменьшении турбулентности во вторичной камере, например, по сравнению с острым углом.
[00093] В контексте настоящего изобретения можно сказать, что блок 450 подачи очистительной системы 300 содержит жидкостную форсунку 730 для подачи жидкостной струи и направления жидкостной струи к соответственной сенсорной поверхности 442, воздушную форсунку 710 для подачи воздушной струи и направления воздушной струи к соответственной сенсорной поверхности 442 и отклоняющее отверстие 720 для подачи другой воздушной струи для отклонения остаточной жидкости от воздушной форсунки 710 и/или с пути воздушной струи, подаваемой воздушной форсункой 710 и/или от соответственной сенсорной поверхности 442.
[00094] Следует отметить, что жидкостная форсунка 730 и воздушная форсунка 710 находятся в непосредственной близости друг от друга из-за требований к компактности блока 450 подачи. Наличие жидкостной форсунки вблизи воздушной форсунки 710 может вызвать засорение воздушной струи остатками жидкости, что приводит к снижению эффективности очистки блока подачи. По этой причине разработчики настоящего изобретения разработали блок 450 подачи, который дополнительно имеет отклоняющее отверстие 720 для отклонения остатков жидкости из жидкостной форсунки 730 от воздушной форсунки 710 и/или с пути воздушной струи, подаваемой через воздушной форсункой 710, и/или от соответственной сенсорной поверхности 442 в течение эксплуатации очистительной системы 300.
[00095] Как видно на Фиг.7, жидкостная форсунка 730 и воздушная форсунка 710 расположены на одинаковом расстоянии от изогнутого края верхней поверхности нижележащей верхней пластины 418. Однако отклоняющее отверстие 720 расположено дальше, чем жидкостная форсунка 730 и воздушная форсунка 710, от изогнутого края верхней поверхности нижележащей верхней пластины 418. В результате можно сказать, что воздушная форсунка 710, отклоняющее отверстие 720 и жидкостная форсунка 730 расположены в «треугольной конфигурации» на верхней поверхности нижележащей верхней пластины 418, причем отклоняющее отверстие 720 находится дальше всех от края верхней поверхности нижележащей верхней пластины 418. По меньшей мере в некоторых вариантах осуществления разработчики настоящего изобретения поняли, что выполнение воздушной форсунки 710, отклоняющего отверстия 720 и жидкостной форсунка 730 в такой треугольной конфигурации позволяет уменьшить размер блока 450 подачи по сравнению, например, с конфигурацией, в которой форсунки 710 и 730 и отклоняющее отверстие 720 находятся на одинаковом расстоянии от изогнутого края верхней поверхности нижележащей верхней пластины 418.
[00096] На Фиг.8 изображен вид 800 в разрезе по линии 8-8 с Фиг.7, который показывает, как воздушная форсунка 710, отклоняющее отверстие 720 и жидкостная форсунка 730 проходят через нижележащую верхнюю пластину 418, от ее верхней поверхности к нижней поверхности.
[00097] Следует отметить, что воздушная форсунка 710, отклоняющее отверстие 720 и жидкостная форсунка 730 не проходят вертикально через нижележащую верхнюю пластину 418. Как видно, воздушная форсунка 710 и жидкостная форсунка 730 расположены под углом друг к другу, поскольку они проходят от верхней поверхности к нижней поверхности нижележащей верхней пластины 418. В проиллюстрированном примере воздушная форсунка 710 и жидкостная форсунка 730 проходят через нижележащую верхнюю пластину 418 и находятся под углом 806 друг к другу. Угол 806 составляет около 20 градусов.
[00098] Можно сказать, что расстояние 802 между воздушной форсункой 710 и жидкостной форсункой 730 на нижней поверхности нижележащей верхней пластины 418 меньше, чем расстояние между ними на верхней поверхности нижележащей верхней пластины 418. Расстояние 802 между воздушной форсункой 710 и жидкостной форсункой 730 на нижней поверхности нижележащей верхней пластины 418 составляет примерно 7,7 миллиметра. Угол 806, приводящий к «уменьшенному между форсунками» расстоянию 802 на нижней поверхности нижележащей верхней пластины 418, может дополнительно способствовать уменьшению размера блока 450 подачи. Угол 806 может также позволить направлять жидкостную струю и воздушную струю к центру соответственной сенсорной поверхности 442.
[00099] Следует также отметить, что как воздушная форсунка 710, так и жидкостная форсунка 730 также наклонены под углом от края нижележащей верхней пластины 418, поскольку они проходят через нижележащую верхнюю пластину 418, так что они находятся дальше от изогнутого края нижележащей верхней пластины 418 на ее нижней поверхности, чем на ее верхней поверхности. Можно сказать, что воздушная форсунка 710 и жидкостная форсунка 730, находящиеся ближе к изогнутому краю на верхней поверхности нижележащей верхней пластины 418, чем на нижней поверхности нижележащей верхней пластины 418, позволяют направлять их соответственные форсунки к центру соответственной сенсорной поверхности 442.
[000100] В некоторых вариантах осуществления настоящего изобретения можно сказать, что воздушная форсунка 710 и жидкостная форсунка 730 проходят через нижележащую верхнюю пластину 418 таким образом, что воздушный путь в воздушной форсунке 710 и путь жидкости в жидкостной форсунке 730 расположены под углом в нижележащей верхней пластине 418, так что их соответственные струи подаются в непосредственной близости друг от друга и к центру соответственной сенсорной поверхности 442.
[000101] Кроме того, отклоняющее отверстие 720 расположено под углом к жидкостной форсунке 730, поскольку оно проходит от верхней поверхности к нижней поверхности нижележащей верхней пластины 418. В проиллюстрированном примере отклоняющее отверстие 720 проходит через нижележащую верхнюю пластину под углом 808 к жидкостной форсунке 730. Угол 808 может составлять 45 градусов. Предполагается, что угол 808 может составлять 80 градусов. Предполагается, что угол 808 может составлять от 0 до 90 градусов.
[000102] Можно сказать, что расстояние между отклоняющим отверстием 720 и жидкостной форсункой 730 на нижней поверхности нижележащей верхней пластины 418 меньше, чем расстояние между ними на верхней поверхности нижележащей верхней пластины 418. Выполнение отклоняющего отверстия 720 и жидкостной форсунки 730 под углом 808 позволяет уменьшить размер подающего блока 450 и может позволить направить отклоняющую струю от воздушной форсунки 710 и/или от воздушной струи и/или от соответствующая сенсорная поверхность 442.
[000103] Также следует отметить, что отклоняющее отверстие 720 также расположено под углом к изогнутому краю нижележащей верхней пластины 418, поскольку оно проходит через нижележащую верхнюю пластину 418, так что отклоняющее отверстие 720 находится ближе к изогнутому краю нижележащей верхней пластины 418 на ее нижней поверхности, чем на ее верхней поверхности. Можно сказать, что выполнение отклоняющего отверстия 720 в нижележащей верхней пластине 418 под углом таким образом, чтобы оно было ближе к изогнутому краю нижележащей верхней пластины 418 на ее нижней поверхности, чем на ее верхней поверхности, позволяет направлять отклоняющую струю от воздушной форсунки 710 и/или от воздушной струи, и/или от соответственной сенсорной поверхности 442.
[000104] В некоторых вариантах осуществления настоящего изобретения можно сказать, что воздушный путь в отклоняющем отверстии 720 расположен под углом в нижележащей верхней пластине 418, так что отклоняющая струя, подаваемая отклоняющим отверстием 720, находится вблизи жидкостной струи жидкостной форсунки 730 и в направлении, которое позволяет отводить остатки жидкости от воздушной форсунки 710 и/или от воздушной струи и/или от соответственной сенсорной поверхности 442.
[000105] Как видно на Фиг.8, область 550 подачи также вмещает в себя струйные диффузоры 852 и 854. Назначение струйного диффузора 852 состоит в том, чтобы формировать жидкостную струю, подаваемую жидкостной форсункой 730, а назначение струйного диффузора 854 - формировать воздушную струю, подаваемую воздушной форсункой 710. В проиллюстрированном примере струйные диффузоры 852 и 854 имеют отверстие в виде «кошачьего глаза», позволяющее соответственным струям иметь эллиптические профили. Однако в других вариантах осуществления настоящего изобретения жидкостная струя и воздушная струя могут быть сформированы диффузорами с множеством отверстий, так чтобы жидкостная струя и воздушная струя имели другие профили. Другие профили струй могут зависеть, среди прочего, от конкретных вариантов реализации настоящего изобретения. Предполагается, что отклоняющее отверстие 720 может оканчиваться в стройном диффузоре 852 на нижней поверхности нижележащей верхней пластины 418 так, чтобы находиться вблизи жидкостной струи, создаваемой жидкостной форсункой 730 в течение эксплуатации.
Эксплуатация
[000106] В течение эксплуатации очистительной системы 300 (см. Фиг.3) контроллер 310 может быть выполнен с возможностью запуска одного или более циклов очистки сенсорных поверхностей 442. Контроллер 310 может быть выполнен с возможностью отслеживания информации, указывающей, насколько загрязнена одна или более камерных сенсорных систем 440. Например, один или более сигналов могут быть приняты контроллером 310 от одной или более камерных сенсорных систем 440, несущих такую информацию. В другом примере один или более сигналов могут быть приняты контроллером 310 от электронного устройства 210, несущего такую информацию. Независимо от того, как такая информация получена, контроллер 310 может использовать эту информацию для запуска одного или более циклов очистки очистительной системы 300.
[000107] Вообще говоря, заданный цикл очистки, выполняемый очистительной системой 300, включает в себя две основные фазы, а именно, (i) фазу подачи жидкости и (ii) фазу подачи воздуха.
[000108] В течение фазы подачи жидкости контроллер 310 запускает жидкостной компрессор 330 для нагнетания очистительной жидкости из резервуара 302 через жидкостный коллектор 320 так, чтобы она подавалась одной или более жидкостными форсунками 730. На Фиг.9 показаны три изображения 902, 904 и 906 того, как жидкостная струя 920 создается и доставляется блоком 450 подачи (его жидкостной форсункой 730) на соответственную сенсорную поверхность 442. Как упоминалось ранее, угловое выполнение жидкостной форсунки 730 в нижележащей верхней пластине 418 позволяет ориентировать жидкостную струю 920 к центру соответственной сенсорной поверхности 442. Кроме того, как можно видеть на трех изображениях 902, 904 и 906, жидкостная струя 920 формируется диффузором 852 в жидкостную струю, имеющую эллиптический профиль. В некоторых вариантах осуществления предполагается, что подача жидкостной струи 920 с эллиптическим профилем может позволить увеличить эффективную площадь соответственной сенсорной поверхности 442, которая принимает жидкостную струю 920.
[000109] В течение текущего цикла очистки фаза подачи воздуха может начинаться сразу после фазы подачи жидкости (например, сразу после подачи жидкостной струи 920). Однако в некоторых вариантах осуществления предполагается, что между фазой подачи жидкости и фазой подачи воздуха текущего цикла очистки может присутствовать промежуточная фаза. Например, в течение промежуточной фазы очистительная система 300 может быть приспособлена так, чтобы не подавать воздух или очистительную жидкость на соответственную сенсорную поверхность 442. В некоторых случаях реализация промежуточной фазы в течение текущего цикла очистки может позволить очистительной жидкости в некотором смысле «смягчить» остатки грязи, которые могут пристать к соответственной очищаемой поверхности 442.
[000110] Независимо от того, включает ли в себя текущий цикл очистки промежуточную фазу, контроллер 310 выполнен с возможностью запускать фазу подачи воздуха. Контроллер 310 может запускать воздушный компрессор 350 для нагнетания воздуха из впускного отверстия 304 для воздуха через воздушный коллектор 340 так, чтобы он подавался одной или более воздушных форсунок 710 и одним или более отклоняющих отверстий 720. На Фиг.9 изображены три изображения 912, 914 и 916 того, как воздушная струя 930 и отклоняющая струя 940 создаются и подаются блоком 450 подачи (воздушной форсункой 710 и отклоняющим отверстием 720, соответственно) на соответственную сенсорную поверхность 442.
[000111] Как упоминалось ранее, угловое выполнение воздушной форсунки 710 в нижележащей верхней пластине 418 позволяет ориентировать воздушную струю 930 к центру соответственной сенсорной поверхности 442. Кроме того, как можно видеть на трех изображениях 912, 914 и 916, воздушная струя 930 формируется диффузором 854 в воздушную струю, имеющую эллиптический профиль. В некоторых вариантах осуществления предполагается, что подача воздушной струи 930 с эллиптическим профилем может позволить увеличить эффективную площадь соответственной сенсорной поверхности 442, которая принимает воздушную струю 930.
[000112] Разработчики настоящего изобретения поняли, что после подачи жидкостной струи 920 в течение фазы подачи жидкости текущего цикла очистки, некоторое количество остатков жидкости может оставаться в жидкостной форсунке 730 и/или может накапливаться вблизи диффузора 852, например, из-за поверхностного натяжения. Разработчики настоящего изобретения также поняли, что при подаче воздушной струи 930 вблизи диффузора 852 и/или жидкостной форсунки 730 может быть создана область низкого давления, из-за которой остатки жидкости могут засорить воздушную струю 930 и податься на соответственную сенсорную поверхность 442. Такое засорение воздушной струи 930 и/или подача остатков жидкости на соответственную сенсорную поверхность 442 может быть нежелательным, поскольку снижает эффективность очистки очистительной системы 300.
[000113] По существу, в течение фазы подачи воздуха текущего цикла очистки отклоняющая струя 940 создается одновременно с воздушной струей 930. Как упоминалось ранее, угловое выполнение отклоняющего отверстия 720 в нижележащей верхней пластине 418 позволяет отклоняющей струе 940 быть ориентированной от центра соответственной сенсорной поверхности 442 и/или от воздушной форсунки 710 и/или от воздушной струи 930. Назначение отклоняющей струи 940 состоит в том, чтобы предотвратить засорение воздушной струи 930 остатками жидкости в жидкостной форсунке 730 и/или вблизи диффузора 852 и их попадание на соответственную сенсорную поверхность 442. Можно сказать, что отклоняющее отверстие 720 создает вторичную воздушную струю, которая в некотором смысле приспособлена «собирать» нежелательные остатки жидкости, оставшиеся в блоке 450 подачи после фазы подачи жидкости, и откачивать их от блока 450 подачи и соответственной сенсорной поверхности 442.
[000114] Как можно видеть на трех изображениях 912, 914 и 916, отклоняющая струя 940 имеет круглый профиль, сформированный отклоняющим отверстием 720. Однако предполагается, что к блоку 450 подачи можно добавить множество диффузоров для формирования профиля отклоняющей струи 940.
[000115] В некоторых вариантах осуществления настоящего изобретения предполагается, что фаза подачи жидкости и фаза подачи воздуха могут частично перекрывать друг друга во времени. Другими словами, контроллер 310 может быть выполнен с возможностью запуска фазы подачи воздуха перед завершением фазы подачи жидкости. Наличие перекрывающихся фаз подачи жидкости и воздуха может быть возможным вследствие, по меньшей мере, разъединенных по текучей среде воздушного и жидкостного коллекторов в очистительной системе 300. В некоторых вариантах осуществления одновременная подача отклоняющей струи 940 и воздушной струи 930 может быть возможна благодаря отклоняющему отверстию 720 и воздушной форсунке 710, соединенных по текучей среде с общим воздушным коллектором, и/или подаче воздуха из основной камеры и вторичной камеры, которые по текучей среде соединены друг с другом.
[000116] В дополнительных вариантах осуществления настоящего изобретения последовательность фаз подачи может варьироваться в заданном цикле очистки. В одном примере фазы подачи жидкости и воздуха могут быть последовательно чередоваться во времени. В другом примере заданная последовательность фаз подачи может включать в себя фазу подачи жидкости, фазу подачи другой жидкости и фазу подачи воздуха. Таким образом, предполагается, что в некоторых вариантах осуществления настоящего изобретения контроллер 310 может запускать больше фаз подачи жидкости, чем фаз подачи воздуха в течение заданного цикла очистки, и наоборот.
[000117] Как показано на Фиг.10, в некоторых вариантах осуществления настоящего изобретения блок 450 подачи очистительной системы 300 может использоваться для выполнения способа 1000 очистки поверхности сенсорной системы. Различные этапы способа 100 теперь будут описаны более подробно.
ЭТАП 1002: подача посредством жидкостной форсунки жидкостной струи, направленной к поверхности сенсорной системы
[000118] Способ 1002 начинается на этапе 1002, когда жидкостная форсунка 730 подает жидкостную струю 920, которая направляется к сенсорной поверхности 442 сенсорной системы 440. В некоторых случаях остатки жидкости могут накапливаться возле жидкостной форсунки 730 после подачи жидкостной струи 920.
[000119] В некоторых вариантах осуществления настоящего изобретения этап 1002 подачи жидкостной струи 920 выполняется в течение фазы подачи жидкости заданного цикла очистки. Следует отметить, что в течение заданного цикла очистки могут быть включены и другие фазы.
[000120] По меньшей мере, в некоторых вариантах осуществления настоящего изобретения способ 1000 может включать в себя выполнение блоком 450 подачи очистительной системы 300 множества циклов очистки, включающих в себя заданный цикл очистки.
ЭТАП 1004: подача посредством воздушной форсунки воздушной струи, направленной к поверхности сенсорной системы
[000121] Способ 1000 продолжается на этапе 1004, на котором воздушная форсунка 710 выполнена с возможностью подачи воздушной струи 930, которая направлена к сенсорной поверхности 442 сенсорной системы 440. Воздушную струю 930 можно использовать для сушки сенсорной поверхности 442 после подачи жидкостной струи 920.
[000122] В некоторых вариантах осуществления настоящего изобретения этап 1004 подачи воздушной струи 930 выполняется в течение фазы подачи воздуха заданного цикла очистки. Следует отметить, что в течение заданного цикла очистки могут быть включены и другие фазы.
[000123] По меньшей мере, в некоторых вариантах осуществления настоящего изобретения способ 1000 может включать себя выполнение блоком 450 подачи очистительной системы 300 множества циклов очистки, включающих в себя заданный цикл очистки.
[000124] В дополнительных вариантах осуществления настоящего изобретения предполагается, что этап 1004 может выполняться одновременно с по меньшей мере одним другим этапом способа 1000. Например, этап 1004 может выполняться одновременно с этапом 1006. В другом примере этап 1004 может начинаться до того, как этап 1002 закончился, или, другими словами, подача воздушной струи 930 может начаться до того, как подача жидкостной струи 920 остановится.
ЭТАП 1006: подача посредством отклоняющего отверстия другой воздушной струи, направленной от воздушной форсунки и поверхности сенсорной системы, при этом подача воздушной струи выполняется одновременно с подачей другой воздушной струи
[000125] Способ продолжается на этапе 1006, на котором отклоняющее отверстие 720 подает другую воздушную струю (например, отклоняющую струю 940), которая направлена от воздушной форсунки 710 и поверхности 442. В некоторых случаях другая воздушная струя может быть направлена от воздушной форсунки 710 и/или от поверхности 442 для отклонения остатков жидкости от воздушной струи 930 и/или поверхности 442.
[000126] В некоторых вариантах осуществления настоящего изобретения этап 1006 подачи другой воздушной струи может выполняться в течение фазы подачи воздуха заданного цикла очистки. Следует отметить, что в течение заданного цикла очистки могут быть включены и другие фазы. По меньшей мере, в некоторых вариантах осуществления настоящего изобретения способ 1000 может включать в себя выполнение блоком 450 подачи очистительной системы 300 множества циклов очистки, включающих в себя заданный цикл очистки.
[000127] В некоторых вариантах осуществления фаза подачи воздуха заданного цикла очистки выполняется сразу после фазы подачи жидкости заданного цикла очистки. В дополнительных вариантах осуществления временной интервал фазы подачи жидкости заданного цикла очистки может, по меньшей мере, частично перекрываться с другим временным интервалом фазы подачи воздуха заданного цикла очистки. Кроме того, в некоторых вариантах осуществления заданный цикл очистки может дополнительно включать в себя промежуточную фазу между фазой подачи жидкости и фазой подачи воздуха для задержки фазы подачи воздуха после осуществления фазы подачи жидкости. В других вариантах осуществления количество циклов очистки во множестве циклов очистки может быть предварительно определено оператором очистительной системы 300.
[000128] В некоторых вариантах осуществления способа 1000 способ 100 может дополнительно включать в себя этап, на котором контроллер 310 отслеживает показатель загрязнения поверхности 442 и в ответ на определение контроллером 310 того, что показатель ниже предварительно определенного порогового значения, способ 1000 может дополнительно содержать этап, на котором контроллер 310 останавливает эксплуатацию блока 450 подачи. В некоторых случаях контроллер 310 может останавливать эксплуатацию до тех пор, пока новый показатель загрязнения не превысит предварительно определенное пороговое значение.
[000129] Модификации и улучшения вышеописанных вариантов реализации настоящего изобретения могут стать очевидными для специалистов в данной области техники. Предшествующее описание предназначено для того, чтобы быть примерным, а не ограничивающим. Поэтому предполагается, что объем настоящего изобретения определен лишь объемом прилагаемой формулы изобретения.
[000130] Хотя вышеописанные варианты реализации были описаны и показаны со ссылкой на конкретные этапы, выполняемые в определенном порядке, следует понимать, что некоторые из этих этапов могут быть объединены, разделены на части или переупорядочены без отхода от принципов настоящего изобретения. Соответственно, порядок и группировка упомянутых этапов ограничениями настоящего изобретения не являются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ очистки датчиковой поверхности датчиковой системы | 2021 |
|
RU2798389C2 |
| УСТРОЙСТВО И СПОСОБЫ ОТБОРА И АНАЛИЗА ОБРАЗЦОВ ТЕКУЧЕЙ СРЕДЫ ИЗ ПОЛОСТИ РТА | 2011 |
|
RU2571327C2 |
| СПОСОБ РАБОТЫ ТОПЛИВНОЙ ФОРСУНКИ | 2017 |
|
RU2712548C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗАГОТОВОК | 2012 |
|
RU2606430C2 |
| НАСОСЫ ДЛЯ РАСТВОРА МОЧЕВИНЫ, СОДЕРЖАЩИЕ ОБВОДНОЙ КАНАЛ УТЕЧКИ | 2012 |
|
RU2573070C2 |
| Система и способ обнаружения частиц в жидкости или воздухе | 2016 |
|
RU2730377C2 |
| СИСТЕМЫ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2010 |
|
RU2534902C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2010 |
|
RU2542783C2 |
| СПОСОБЫ ОБЕСПЕЧЕНИЯ БЛАГОПРИЯТНОГО ЭФФЕКТА ДЛЯ ПОЛОСТИ РТА | 2010 |
|
RU2543039C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОКРОЙ ОЧИСТКИ ВОЗДУХА | 2017 |
|
RU2687426C2 |





Группа изобретений относится к блоку подачи для очистительной системы, очистительной системе для очистки сенсорной системы беспилотного автомобиля и способу очистки поверхности сенсорной системы. Блок подачи имеет жидкостную форсунку для подачи жидкостной струи и направления жидкостной струи к поверхности сенсорной системы, воздушную форсунку для подачи воздушной струи и направления воздушной струи к поверхности сенсорной системы и отклоняющее отверстие для подачи другой воздушной струи для отклонения жидкостной струи от воздушной форсунки. Жидкостная форсунка расположена вблизи воздушной форсунки. Воздушная форсунка и отклоняющее отверстие сообщаются по текучей среде с единым воздушным коллектором. Обеспечивается улучшение очистки сенсорной системы беспилотного автомобиля. 3 н. и 17 з.п. ф-лы, 10 ил.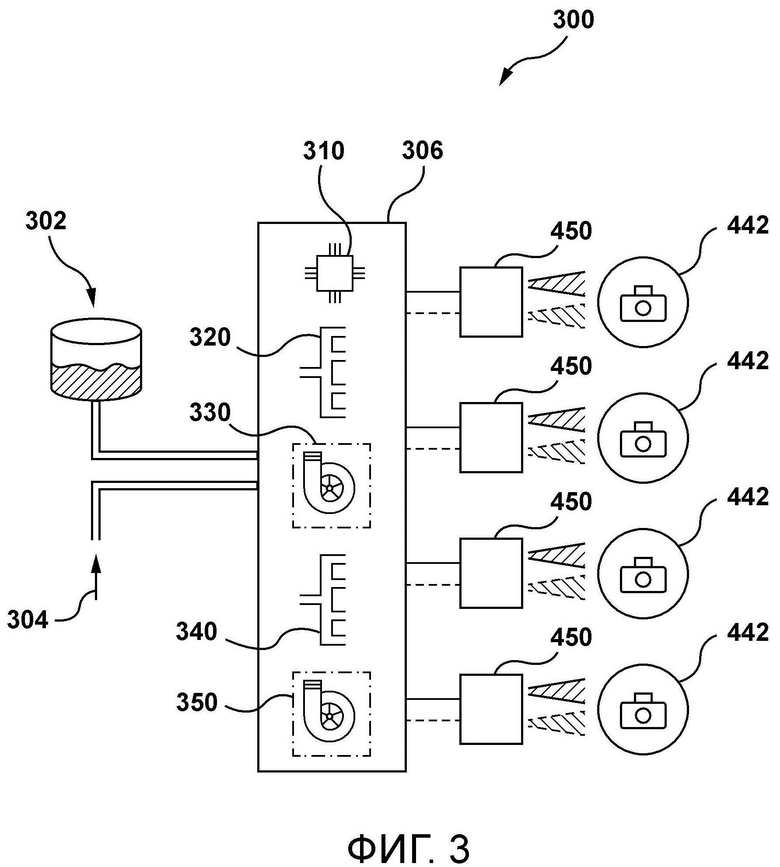
1. Блок подачи для очистительной системы, при этом очистительная система выполнена для очистки сенсорной системы беспилотного автомобиля (SDC), причем сенсорная система и очистительная система установлены на SDC, и
блок подачи содержит:
жидкостную форсунку для подачи жидкостной струи и направления жидкостной струи к поверхности сенсорной системы;
воздушную форсунку для подачи воздушной струи и направления воздушной струи к поверхности сенсорной системы,
при этом жидкостная форсунка расположена вблизи воздушной форсунки;
отклоняющее отверстие для подачи другой воздушной струи для отклонения жидкостной струи в сторону от воздушной форсунки,
при этом воздушная форсунка и отклоняющее отверстие сообщаются по текучей среде с единым воздушным коллектором.
2. Блок подачи по п.1, в котором жидкостная форсунка сообщается по текучей среде с резервуаром через жидкостный канал жидкостного коллектора, а воздушная форсунка сообщается по текучей среде с впускным отверстием для воздуха через воздушный канал единого воздушного коллектора, при этом воздушный канал разъединен по текучей среде с жидкостным каналом.
3. Блок подачи по п.2, в котором воздушный канал имеет дальний конец и ближний конец,
при этом ближний конец соединен по текучей среде с впускным отверстием для воздуха,
дальний конец формирует (i) основную камеру для обеспечения воздуха в воздушную форсунку и (ii) вторичную камеру для обеспечения воздуха в отклоняющее отверстие.
4. Блок подачи по п.2, в котором сенсорная система имеет корпус, причем корпус имеет:
нижнюю пластину для крепления к поверхности SDC;
одну или более стенок, соединяющих нижнюю пластину с верхней пластиной, при этом поверхность сенсорной системы расположена внутри корпуса и обращена наружу к одной или более стенкам; и
верхнюю пластину, образующую воздушный канал и жидкостный канал, при этом блок подачи расположен на краю верхней пластины и ориентирован для подачи воздушной струи и жидкостной струи к поверхности сенсорной системы.
5. Блок подачи по п.4, при этом поверхность SDC представляет собой поверхность по меньшей мере одного из: крыши, передней решетки и боковой двери SDC.
6. Очистительная система для очистки сенсорной системы беспилотного автомобиля (SDC), причем сенсорная система и очистительная система установлены на SDC, при этом очистительная система содержит:
резервуар для хранения очистительной жидкости очистительной системы;
впускное отверстие для воздуха для обеспечения источника воздуха в очистительную систему;
жидкостный коллектор, обеспечивающий сообщение по текучей среде между (i) резервуаром и блоком подачи;
воздушный коллектор для обеспечения сообщения по текучей среде между (ii) впускным отверстием для воздуха и блоком подачи;
компрессорный блок для нагнетания (i) жидкости из резервуара в блок подачи и (ii) воздуха из впускного отверстия для воздуха в блок подачи; и
при этом блок подачи содержит:
жидкостную форсунку для подачи жидкостной струи и направления жидкостной струи к поверхности сенсорной системы;
воздушную форсунку для подачи воздушной струи и направления воздушной струи к поверхности сенсорной системы,
причем жидкостная форсунка расположена вблизи воздушной форсунки;
отклоняющее отверстие для подачи другой воздушной струи для отклонения жидкостной струи в сторону от воздушной форсунки,
причем воздушная форсунка и отклоняющее отверстие сообщаются по текучей среде с воздушным коллектором.
7. Очистительная система по п.6, в которой компрессорный блок включает в себя (i) воздушный компрессор для нагнетания воздуха из впускного отверстия для воздуха в блок подачи и (ii) жидкостный компрессор для нагнетания очистительной жидкости из резервуара и блока подачи.
8. Очистительная система по п.6, в которой жидкостная форсунка сообщается по текучей среде с резервуаром через жидкостный канал жидкостного коллектора, а воздушная форсунка сообщается по текучей среде с впускным отверстием для воздуха через воздушный канал воздушного коллектора, причем воздушный канал разъединен по текучей среде с жидкостным каналом.
9. Очистительная система по п.8, в которой воздушный канал имеет дальний конец и ближний конец, причем
ближний конец соединен по текучей среде с впускным отверстием для воздуха,
дальний конец формирует (i) основную камеру для обеспечения воздуха в воздушную форсунку и (ii) вторичную камеру для обеспечения воздуха в отклоняющее отверстие.
10. Очистительная система по п.8, в которой сенсорная система имеет корпус, причем корпус имеет:
нижнюю пластину, прикрепленную к поверхности SDC;
одну или более стенок, соединяющих нижнюю пластину с верхней пластиной, при этом поверхность сенсорной системы расположена внутри корпуса и обращена наружу к одной или более стенкам; и
верхнюю пластину, образующую воздушный канал и жидкостный канал, при этом блок подачи расположен на краю верхней пластины и ориентирован для подачи воздушной струи и жидкостной струи к поверхности сенсорной системы.
11. Очистительная система по п.10, в которой поверхность SDC представляет собой поверхность по меньшей мере одного из: крыши, передней решетки и боковой двери SDC.
12. Способ очистки поверхности сенсорной системы, выполняемый очистительной системой, содержащей блок подачи и контроллер,
причем блок подачи включает в себя жидкостную форсунку, воздушную форсунку, расположенную вблизи воздушной форсунки, и отклоняющее отверстие, сообщающееся по текучей среде с воздушной форсункой,
при этом способ содержит этапы, на которых:
подают посредством жидкостной форсунки жидкостную струю, направленную к поверхности сенсорной системы;
подают посредством воздушной форсунки воздушную струю, направленную к поверхности сенсорной системы;
подают посредством отклоняющего отверстия другую воздушную струю, направленную от воздушной форсунки и поверхности сенсорной системы,
причем упомянутую подачу воздушной струи осуществляют одновременно с упомянутой подачей другой воздушной струи.
13. Способ по п.12, в котором упомянутую подачу жидкостной струи осуществляют в течение фазы подачи жидкости заданного цикла очистки, и упомянутую подачу воздушной струи и другой воздушной струи выполняют в течение фазы подачи воздуха заданного цикла очистки, при этом способ включает в себя этап, на котором осуществляют множество циклов очистки, включающих в себя заданный цикл очистки.
14. Способ по п.13, в котором фазу подачи воздуха заданного цикла очистки осуществляют сразу после фазы подачи жидкости заданного цикла очистки.
15. Способ по п.13, в котором временной интервал фазы подачи жидкости заданного цикла очистки по меньшей мере частично перекрывается с другим временным интервалом фазы подачи воздуха заданного цикла очистки.
16. Способ по п.13, в котором заданный цикл очистки дополнительно имеет промежуточную фазу между фазой подачи жидкости и фазой подачи воздуха, причем промежуточная фаза предназначена для задержки фазы подачи воздуха после осуществления фазы подачи жидкости.
17. Способ по п.13, в котором заданный цикл очистки дополнительно имеет другую фазу подачи жидкости.
18. Способ по п.13, в котором заданный цикл очистки дополнительно имеет другую фазу подачи воздуха.
19. Способ по п.13, в котором количество циклов очистки в множестве циклов очистки предварительно определено оператором очистительной системы.
20. Способ по п.12, при этом способ дополнительно содержит этапы, на которых:
отслеживают посредством контроллера показатель загрязнения поверхности сенсорной системы;
в ответ на определение контроллером того, что показатель загрязнения ниже предварительно определенного порогового значения,
останавливают посредством контроллера эксплуатацию блока подачи.
| US 9505382 B2, 29.11.2016 | |||
| СПОСОБ КЛЕПКИ | 1993 |
|
RU2072274C1 |
| WO 2014010580 A1, 16.01.2014 | |||
| US 2003155001 A1, 21.08.2003 | |||
| US 6199773 B1, 13.03.2001. | |||

