ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к способу мониторинга системы управления на рабочей машине, соответствующему ограничительной части п.1 формулы изобретения. Изобретение также относится к рабочей машине, в частности - лесозаготовительной машине, соответствующей ограничительной части п.14 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ
Рабочие машины, такие, как лесозаготовительные машины, представляют собой высокотехнологичную продукцию, оснащенную сложными системами управления, позволяющими организовывать ряд различных функций и управлять ими. В нижеследующем описании, помимо лесозаготовительных машин, термин «рабочая машина» также относится к сельскохозяйственным машинам, строительным машинам, таким, как погрузчики или экскаваторы.
В различных узлах машины, принадлежащих рабочей машине, для контроля упомянутых узлов машины и управления ими применяются блоки управления. На уровне управления машиной, эти блоки управления могут в реальном масштабе времени обмениваться информацией и соединяться друг с другом посредством одной или нескольких систем шин. Функционирование блоков управления определяется программами или программным обеспечением, хранимым в памяти в блоке управления (а также в органах управления программируемых логических контроллеров (ПЛК (PLC))), при этом упомянутая память может быть - но не обязательно является - программируемой. Современные рабочие машины могут содержать сотни различных электронных блоков управления, включая большие микропроцессорные блоки на базе центрального процессора (ЦП (CP)), например, так называемые электронные блоки управления (ЭБУ (ECUs)). В свою очередь, каждый ЭБУ - посредством кабельного или беспроводного соединения - соединен с такими компонентами в рабочей машине, как один или несколько датчиков и/или исполнительных механизмов. Тогда такой ЭБУ принимает параметры ввода, т.е., сигналы или данные ввода из нескольких меньших блоков управления, таких, как датчики, и посылает данные параметров вывода, т.е., данные вывода, сигналы управления или данные управления, обратно - нескольким исполнительным механизмам. Данные этого типа обычно называют данными Вв-Выв (I/O). Вв-Выв - это аббревиатура, которая обозначает термин «ввода-вывода» и описывает поток данных, который идет через различные интерфейсы в сети с топологией шин управления.
В рабочих машинах и аналогичных транспортных средствах имеет место связь между упомянутыми блоками управления через сети данных различных типов, среди которых наиболее распространенными являются соответствующие протоколу шины ЛСК (CAN - локальной сети контроллеров) или аналогичным протоколам высокоскоростной передачи данных. Посредством этих сетей могут осуществлять связь блоки управления центральных процессоров, датчики и исполнительные средства (исполнительные механизмы). Эта связь также дает возможность обновлять программное обеспечение и проводить поиски и диагностику ошибок.
Для анализа, т.е., для диагностики и/или прогнозирования ошибок в системах управления, может понадобиться мониторинг рабочего состояния этой сложной системы управления. Для диагностики систем управления разработан ряд различных методов и устройств, в первую очередь - применительно к двигателям и системам управления двигателями, включая экспертные системы и различные математические модели, такие, как нейронные сети с алгоритмами самообучения.
Общим для упомянутых технологий мониторинга является то, что они требуют определенного объема критических данных, по которым проводят анализ. Посредством обработки собираемых данных, систему мониторинга можно использовать частично для диагностики, а значит - и идентификации источника ошибки после возникновения ошибки, а частично - в качестве прогностической системы для идентификации исходного источника ошибки перед появлением этой ошибки.
Лесозаготовительные машины, а также ряд рабочих машин других типов обычно имеют компьютер или выполненную на основе персонального компьютера (ПК (PC)) бортовую систему с программами или приложениями для различных целей, в частности - для управления эксплуатационно-производственными или технологическими данными для рабочей машины. В нижеследующем описании термин «эксплуатационно-производственные или технологические данные» относится к данным, которые обычно отделены от принадлежащих системе управления машиной данных управления машиной в том смысле, что упомянутые эксплуатационные данные касаются, по существу, функций и эффективности эксплуатации рабочей машины. Они могут касаться, например, данных измерения для вычисления производственной оптимизации эксплуатации рабочей машины, вычисления, а также мониторинга и хранения производственных данных.
Хотя современная электроника гарантирует высокую эксплуатационную надежность, все же возможны незапланированные остановы, например, из-за того, что некоторая функция машины в системе управления полностью перестает работать, или потому, что она больше не работает как надо. Поиск ошибок в случае незапланированного останова может оказаться и трудным, и отнимающим много времени.
Помимо этого, могут возникать вопросы о гарантийных обязательствах, а в альтернативном варианте - если рабочей машиной каким-либо образом манипулируют потребители - и о том, правильно ли эксплуатируют рабочую машину. При поиске ошибок также может оказаться выгодной возможность простого управления, позволяющая определить, действительно ли предыдущее замена компонента, например - гидравлического клапана управления, решила ранее существовавшую проблему.
Вместе с тем, на практике до сих пор нет средств, позволяющих техникам осуществлять мониторинг и проводить эффективный поиск ошибок системы управления рабочих машин. Чрезвычайно часто поиск ошибок придется проводить в местности, находящейся далеко от ближайшей сервисной мастерской, и лишь на основании устного сообщения водителя или оператора рабочей машины. В некоторых случаях, методы бортовой диагностики, такие, как бортовая диагностика (БДи (OBD)) или БДи-II (OBD-II) либо аналогичные средства диагностики, дают такую информацию, что быстрая локализация проблемы, о которой идет речь, оказывается возможной. Поскольку блоки управления, из которых состоит система управления, обычно производят шум в случае обнаруживаемых ошибок, а содержание информации об ошибках в системе управления в целом ограничено, как по длительности исполнения, так и по содержанию, мониторингу подвергаются лишь части системы управления в целом, причем материал, получаемый как основа для диагностической работы, на практике зачатую оказывается недостаточным, а поиск ошибок - даже менее полезным в целях диагностики.
В других случаях полезной поддержкой в диагностике и локализации источника ошибок может служить ограниченное количество файлов данных и журналов устранения изолированных ошибок в системе для нескольких критичных основных компонентов рабочей машины. Если поиск относится к ошибкам, которые возникают лишь спорадически или случайно, шанс механической изоляции источника ошибок в системе управления оказывается меньшим, поскольку обычно очень трудно предпринять активные попытки спровоцировать такие ошибки.
Чтобы удовлетворить этим требованиям, к настоящему времени предложены системы различных типов, которые могут осуществлять мониторинг определенных конкретных функций и процессов рабочей машины непрерывно в реальном масштабе времени путем записи данных из системы управления рабочей машины на уровне мониторинга, предусмотренном в системе управления, например - с помощью аппаратуры записи на борту рабочей машины. Известные системы записи могут главным образом проводить сравнение с цифровым тахографом, при этом выбираемые журналы данных для рабочей машины сохраняются для некоторого ограниченного количества основных компонентов и на протяжении некоторого ограниченного предыдущего периода времени. Таким образом, одна проблема, связанная с известными техническими решениями задачи записи для мониторинга систем управления, заключается в том, что они ограничены, потому что обычно включают в себя лишь данные для конкретных основных компонентов или функций, которые считаются критическими; например, они могут касаться записываемых сигналов с данными двигателя. В этом контексте, следует помнить, что самые современные блоки управления, т.е., первичные узлы, такие, как ЭБУ, обычно лишь посылают диагностические данные с кодами ошибок в случае ошибок, которые отслеживают внутреннее программное обеспечение блока управления. Поэтому, из-за ограниченного объема данных измерения известных систем мониторинга, технику может быть трудно эффективно диагностировать или прогнозировать появление ошибок в системах управления и с приемлемой достоверностью локализовать каждый источник ошибок, в частности - потому, что эти ошибки не обязательно возникают в специализированном критическом компоненте.
ЗАДАЧИ ИЗОБРЕТЕНИЯ
Таким образом, существует потребность в усовершенствованных способах и устройствах для мониторинга систем управления, содержащихся в рабочих машинах, а значит - и более эффективного воплощения возможностей диагностики и/или прогнозирования ошибок в системе управления.
Поэтому первая задача данного изобретения состоит в том, чтобы разработать способ, который дает возможность эффективнее осуществлять простой мониторинг систем управления, а вследствие этого - также диагностировать и/или прогнозировать ошибки в системе управления рабочих машин.
В этой связи отметим, что решение может заключаться - частично - в воплощении сбора в реальном масштабе времени больших объемов данных, которые генерирует рабочая машина, а частично - в воплощении хранения этих данных для дальнейшего анализа. Чтобы получить доступ к и обеспечить знание информации о том, как эксплуатируется каждая конкретная рабочая машина, путем сбора очень больших объемов данных в реальном масштабе времени и (например) хранения данных в облаке можно вносить вклад в дополнительную значимость этих мер, как для производителей машин, так и для потребителей. Потребитель, у которого много рабочих машин, может получать компилируемый обзор функционирования и производства рабочих машин. Можно также использовать агрегатные данные для снабжения потребителя или водителя машины информацией в реальном масштабе времени через такой интерфейс «человек-машина» (ИЧМ), как окно диалога на мониторе кабины водителя, где отображаются, например, предложения по мерам повышения рабочей характеристики.
Другая задача изобретения состоит в том, чтобы разработать рабочую машину, в частности - лесозаготовительную машину, которая включает в себя систему мониторинга, конфигурация которой обеспечивает на уровне мониторинга работу в соответствии с изобретением.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Представление, образующее основу изобретения, заключается в том, чтобы эффективнее диагностировать или прогнозировать появление ошибок в системе управления, которая входит в состав рабочей машины, и воплощается, если возможен простой способ разработки основной статистической базы регистрируемых данных. В этой связи отметим, что речь идет не только о регистрации кодов ошибок, выдаваемых отдельными блоками управления, но и о сборе и записи цифрового потока всех имеющих отношение к делу данных ввода-вывода, т.е., параметров ввода и параметров вывода, как из современных электронных блоков управления (первичных блоков управления) в индивидуальные датчики (вторичные блоки управления), так и в обратном направлении, которые могут возникать в системе управления.
Путем сбора больших объемов данных измерения посредством мониторинга и записи всех сигналов и возможных состояний программного обеспечения, т.е., сигналов ввода-вывода, а также появления логических сигналов, можно получить статистическую базу требуемого критического размера. Таким образом, данные измерения, которые необходимы для поиска каждой конкретной ошибки, оказываются доступными и могут быть проанализированы после того, как произошла ошибка. База данных, которая содержит исчерпывающий объем данных эксплуатации и измерения из системы управления, увеличит возможность не только локализации появления ошибок, но и прогностического предсказания необходимости мер, позволяющих избежать появления ошибок, а значит и остановить изменение рабочих условий для рабочих машин.
Соответственно, устанавливается:
- что из системы управления получают множество параметров ввода в форме сигналов, вследствие чего система управления генерирует действительное значение по одному или нескольким параметрам вывода в форме сигналов на основе упомянутого множества параметров ввода;
- что цифровой поток данных, содержащий и упомянутые параметры ввода, и параметры вывода, через шину управления или шину связи адресуется к области данных в рабочей памяти или памяти на элементах с захваченным потоком, которая входит в состав персонального компьютера на борту рабочей машины;
- что файл данных, соответствующий области данных, периодически сохраняется в энергонезависимой памяти поддержки данных или передается средством телекоммуникаций и сохраняется во внутренней энергонезависимой памяти поддержки данных.
В альтернативном варианте осуществления, каждому инициируемому файлу данных можно назначить особую так называемую функцию хранения журнала, например, в форме маркера синхронизации посредством часов перед сохранением упомянутого соответственного файла данных.
В еще одном альтернативном варианте осуществления изобретения, соответствующие сигналы можно сравнивать между, по меньшей мере, одним из упомянутых параметров ввода или параметров вывода между предыдущим и соответственно впоследствии созданным файлом данных, так что вследствие этого можно идентифицировать любые девиации, посредством чего можно снизить требуемую ширину полосы за счет того, что изменяться, т.е., совершать девиацию относительно предыдущего управления, могут лишь сигналы, которые адресованы буферной памяти оперативного запоминающего устройства (ОЗУ) персонального компьютера и используются для создания последовательности файлов данных, каждый из которых представляет образ процесса блока управления.
В альтернативном варианте осуществления используется совокупность бортовых данных или персонального компьютера рабочей машины, как для манипуляций эксплуатационно-производственными или технологическими данными рабочей машины, так и для записи параметров ввода и параметров вывода из системы управления и манипуляций ими. Это означает, что бортовой компьютер или персональный компьютер рабочей машины также используют для сбора всех внешних данных ввода-вывода (значений и состояний) и записи их в буфере во время эксплуатации. Кроме того, можно записывать состояние логики управления в форме логических сигналов. В этой части, сказанное может касаться мгновенных состояний блоков, вычисляемых данных и внутренней связи между функциональными блоками и программным обеспечением.
В варианте осуществления, система управления посылает логические сигналы на высокой частоте в бортовой компьютер. По выбору, логика системы управления может управлять тем, какие сигналы придется изменить с момента предыдущего управления и тем самым сократить требуемую ширину полосы, посылая лишь сигналы, которые изменились. Частота должна быть переменной, причем предпочтительна возможность посылать сигналы на частоте, по меньшей мере, 100 Гц (≥ 100 Гц).
Когда упомянутые сигналы (параметры ввода и параметры вывода из узлов) посылаются в компьютер или персональный компьютер на борту, один и тот же источник данных можно использовать для достижения ряда различных целей, а не только для поиска ошибок. С помощью программного обеспечения или приложений, которые установлены на компьютере на борту, можно проводить, например, усовершенствованные анализы собираемых данных в реальном масштабе времени, обеспечивая водителю возможность принятия лучшего решения о потенциальных улучшениях рабочего режима или настроек в машине. Примером некоторой функции могло бы прослужить предупреждение водителя посредством сообщения о мониторинге бортового компьютера, если в гидравлической системе, входящей в состав рабочей машины, в некоторый момент возникает пик давления, а выдаваемая через монитор рекомендация водителю изменить некоторую конкретную настройку, которая за счет сравнения между эксплуатационно-производственными и технологическими данными, а также параметрами ввода и параметрами вывода из системы управления, должна резонно привести к наращиванию производства. Не в последнюю очередь для менее опытного водителя машины, такая информация, предоставляемая водителю в реальном масштабе времени, могла бы оказаться исключительно значимой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее приводится подробное описание изобретения со ссылками на прилагаемые чертежи, на которых:
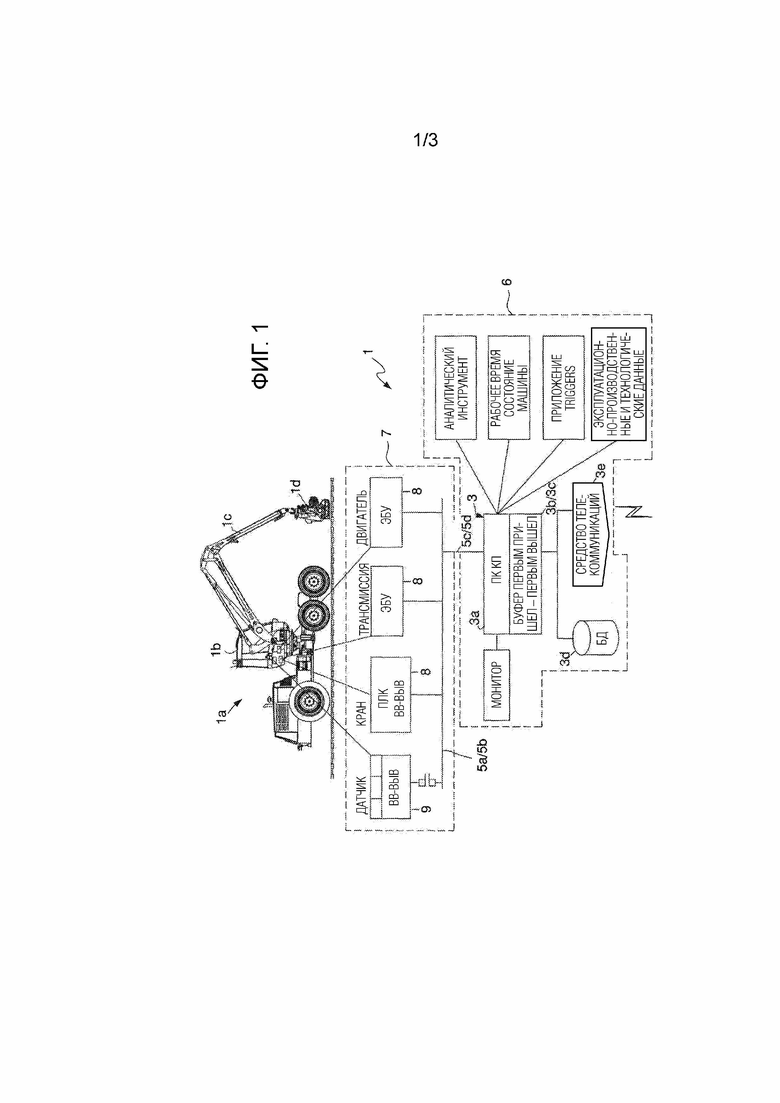
на фиг.1 схематически показана блок-схема блоков, входящих в состав системы мониторинга в рабочей машине в соответствии с данным изобретением;
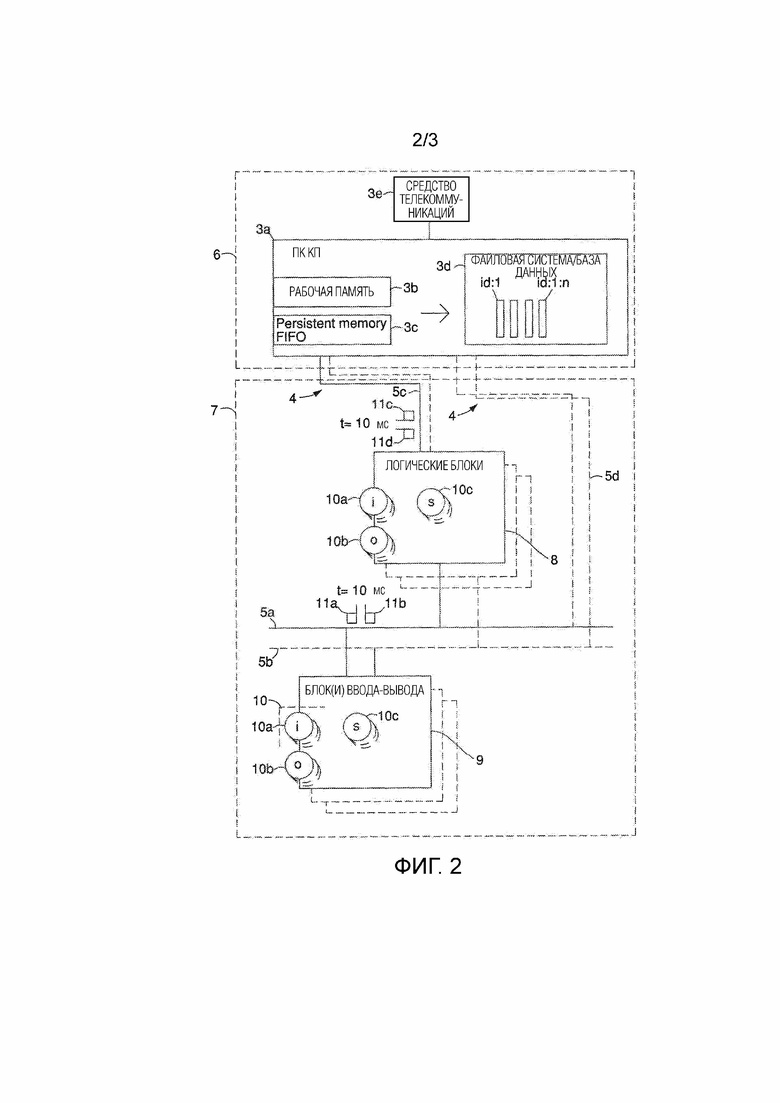
на фиг.2 схематически показан пример типичной конфигурации системы управления, выполненной на основе соответствующих ЛСК, которая входит в состав рабочей машины и которая адаптирована к сбору и буферизации данных ввода-вывода и логических сигналов в соответствии с данным изобретением;
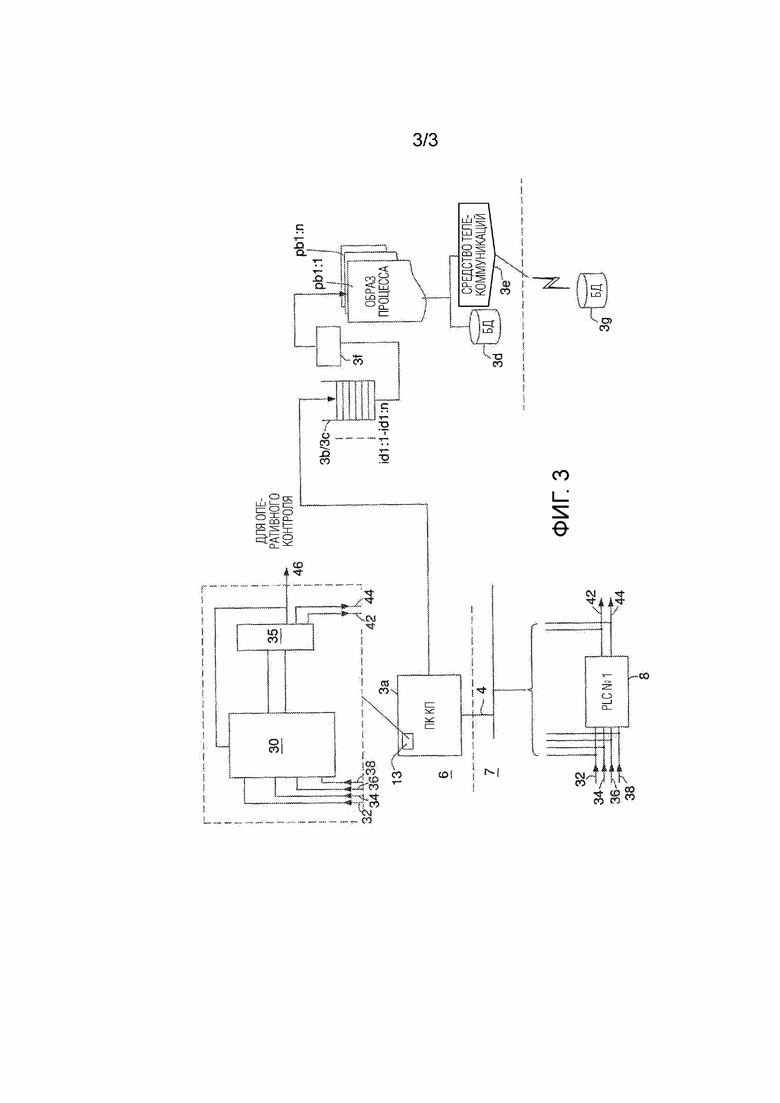
на фиг.3 показана блок-схема последовательности операций, которая схематически иллюстрирует, как может работать способ диагностики и/или прогнозирования, предусматриваемый в системе мониторинга, соответствующей изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг.1 схематически показана рабочая машина 1a с системой мониторинга системы 1 управления, являющейся составной частью в рабочей машине на уровне мониторинга. Система мониторинга дает возможность собирать и сравнивать данные, которые можно использовать для диагностики и/или прогнозирования появления ошибок в системе управления рабочей машины. Рабочая машина 1a, здесь - в форме лесозаготовительной машины, такой, как лесной комбайн, оснащена кабиной 1b водителя и выдвижной балкой 1с крана, которая на своем свободном конце несет агрегат 1d лесного комбайна. Рабочая машина 1a оснащена системой 1 управления, которая в соответствии с изобретением на уровне мониторинга содержит блок 3 мониторинга. Система 1 управления может содержать шину управления с сетью компьютера с топологией шин локальной сети контроллеров (ЛСК) для связи между первичными блоками управления (ЭБУ), которые могут управлять двигателем, трансмиссией, и т.д., блоки управления ПЛК, которые могут управлять стрелой крана (балкой крана), и дает водителю или оператору возможность вести и эксплуатировать лесозаготовительную машину по назначению. На более низком уровне, известная система управления может быть оснащена множеством сетей с топологией шин, соответствующей протоколу ЛСС (локальной соединительной сети) на основе концепции «ведущий-ведомый», для связи со вторичными блоками управления в форме более простых блоков, таких, как датчики, исполнительные механизмы и измерительные средства.
Кабина 1b водителя рабочей машины 1a оснащена персональным компьютером компьютерной поддержки (ПК КП (SUP-PC)), обозначенным позицией 3а, входящим в состав упомянутого блока 3 мониторинга, с операторским интерфейсом «человек-машина» (операторским ИЧМ (HMI)) между водителем и машиной, т.е., на практике - монитором и/или сенсорным экраном, причем упомянутый компьютер можно не рассматривать как эквивалентный персональному компьютеру, ПК. Как известно, компьютер 3a может содержать процессорный блок центрального процессора (ЦП (CPU)), модуль памяти оперативного запоминающего устройства (ОЗУ (RAM)), базу данных в форме энергонезависимой памяти, блоки ввода и вывода для осуществления связи с компьютером, а также сетевой интерфейс 4, интерфейс ввода-вывода с подходящим сетевым адаптером для осуществления связи с системой 1 управления на уровне 7 управления машиной.
Компьютер 3a, находящийся на борту рабочей машины 1a, может содержать программное обеспечение и некоторое количество различных приложений не только для мониторинга, но и для манипулирования эксплуатационно-производственными и технологическими данными для рабочей машины. Это средства для хранения производственных данных, управления различными рабочими функциями рабочей машины и их организации, например - для измерения толщины и длины ствола дерева, а также для подготовки к валке, обрезке сучьев и разрубке. Компьютер 3a также может содержать приложения, т.е., прикладные программы или прикладное программное обеспечение, что позволяет водителю эксплуатировать машину по прямому назначению. В этом случае, речь может идти о компьютерных программах, которые подготавливают эксплуатацию рабочей машины 1a, а в дополнение к ним - о базе данных с соответствующей информацией об общем объеме производства или общей производительности рабочей машины. Например, можно отметить, что компьютер 3a рабочей машины по команде от водителя и посредством значений параметров датчиков, вводимых и/или выводимых из датчиков, входящих в состав аппаратного обеспечения, может рассчитывать и предлагать оптимальную подготовку деревьев, валка которых осуществляется. В агрегате 1d лесного комбайна диаметр ствола либо измеряется - посредством подающего ролика - длина, либо измеряются промежуток между ножами для обрезки веток и их длина, обычно - посредством распорного диска (не показан). В дополнение к упомянутым сенсорному экрану и компьютеру 3, кабина 1b водителя может быть оснащена соединениями, соответствующими стандартам беспроводных локальных сетей (БЛС (W-LAN)) и универсальной последовательной шины (УПШ (USB).
Компьютер 3a, являющийся составной частью блока 3 мониторинга, находится в обеспечивающем передачу данных соединении с уровнем 7 управления машиной посредством шины 5c, 5d связи, такой, как Ethernet, или посредством прямой связи с шиной управления. Дискретные данные из узлов 8, 9 можно адресовать в компьютер 3a посредством шины связи и центрального или «ведущего» узла 10. Центральный или «ведущий» узел 10 может собирать и компилировать все данные ввода-вывода из других блоков, которые подключены к различным шинам управления. Таким образом, блок 3 мониторинга составляет некую разновидность уровня 6 мониторинга системы 1 управления. Блок 3 мониторинга также называется узлом 3 мониторинга в нижеследующем описании.
Обращаясь также к фиг.2, отмечаем, что система 1 мониторинга дополнительно содержит уровень 7 управления машиной, на котором находятся элементы, подключенные к исполнительным механизмам, датчикам, и т.д., различных типов. Уровень 7 управления машиной может содержать один или несколько электронных блоков 8, которые находятся в обеспечивающем передачу данных соединении с шиной 5a, 5b управления. Один или несколько электронных блоков 8 также могут находиться в обеспечивающем передачу данных соединении с шиной 5c связи. Блоки 8 функционируют как первичные узлы на уровне 7 управления машиной, а также называются узлами 8 управления машиной в нижеследующем описании. Первичный узел 8 может содержать, например, выполненный на основе микропроцессорного управления компьютер MC-PC или программируемый логический контроллер (ПЛК (PLC)) с портами ввода и вывода для соединений, идущих к исполнительным механизмам, датчикам 9 или другим элементам в аппаратном обеспечении рабочей машины 1, либо от этих механизмов, датчиков или элементов.
Как яснее всего видно из фиг.2, на борту рабочей машины 1a будет находиться рабочая память 3b и/или память на элементах с захваченным потоком 3c, соединенная с компьютером 3a, и файловая система 3d, т.е., на практике - память очередей или дисковое пространство, которую или которое можно использовать для временного хранения данных, и связанный буфер 3с обратного магазинного типа («первым пришел - первым вышел», FIFO), а данные попеременно текут в буфере очередей. Упомянутый буфер может относиться к типу, предусматривающему наличие изменяемого размера байта, выбираемого в зависимости от потребности в емкости памяти. Значение по умолчанию подходящего размера буфера может содержать емкость памяти, требуемую для создания возможности приема некоторого определенного количества данных сигнала на протяжении предварительно заданной единицы времени, например, около 10—20 минут данных сигнала высокого разрешения, вследствие чего для рабочей машины могут оказаться предпочтительными около 15 минут данных высокого разрешения. Буфер 3b и FIFO 3c можно выполнить так, что поверх более старых данных сигнала будут записываться более новые данные, когда выбранный размер буфера больше не является достаточным. Таким образом, буфер 3b и FIFO 3c могут уменьшить число «n» файлов данных, id1:1 — id1:n, на предварительно определенный размер в байтах в энергонезависимой памяти 3d поддержки данных, например - на жестком диске, находящемся на борту рабочей машины. Таким образом, требуемые данные сигнала окажутся в наличии в базе 3d данных для просмотра при необходимости, например - при поиске ошибок.
Как будет видно на фиг.3, каждый файл данных, id1:1 — id1:n, соответственно обеспечивает образ процесса, pb:1 — pb1:n, состоящий из данных сигнала, записанных на протяжении предварительно заданного интервала времени. С помощью так называемого средства 3f регистрации, которое находится на выходе этапа 3b/3c FIFO, каждому инициируемому файлу данных, а значит - и соответственным образам процесса, можно назначить особую так называемую функцию хранения журнала, например, в форме маркера синхронизации посредством часов. Тем самым можно упорядоченным и обеспечивающим простой поиск образом скомпоновать последовательно идущие образы процесса, pb:1 - pb1:n, в энергонезависимой памяти 3d поддержки данных на борту рабочей машины 1a, а в альтернативном варианте - с помощью средства 3e телекоммуникаций (TRANS) в энергонезависимой памяти 3e поддержки данных, находящейся на некотором расстоянии, такой, как жесткий диск или база данных.
Таким образом, каждый образ процесса, pb:1 - pb1:n, обеспечивает точный образ состояния системы 1 управления в течение некоторого конкретного интервала времени. Данные сигнала, id1:1 - id1:n, которые создают упомянутые образы процесса и хранятся в энергонезависимой памяти 3d поддержки данных на борту рабочей машины 1a, а в альтернативном варианте - в энергонезависимой памяти 3f, находящейся на некотором расстоянии, можно впоследствии стирать через регулярные интервалы, например - еженедельно, когда данные больше не будут считаться необходимыми.
Обращаясь опять к фиг.2, отмечаем, что, как упоминалось вначале, все узлы в такой сети, как ЛСК, функционируют как ведущие. Сообщение передается посредством «идентификаторов». В некоторый заданный момент времени, несколько узлов могут передавать данные в шину 5a, 5b управления. Код сообщения после этого способствует определению приоритетов сообщений. В отличие от шины ЛСК, шина ЛСС работает с топологией «ведущий-ведомый». Как правило, сеть может содержать ведущего 10 с ведомыми, число которых доходит до 16. Всю связь инициирует главный узел (ведущий).
Как описано прежде, базис этого изобретения составляет не только регистрация кодов ошибок, выдаваемых отдельными первичными блоками управления (первичными узлами 8), соединенными с шиной 5a, 5b управления, но и сбор и запись цифрового потока всех имеющих отношение к делу данных ввода-вывода, которые могут возникать в системе управления, т.е., параметров ввода и параметров вывода, передаваемых как из представляющих собой ЭБУ первичных блоков управления (первичных узлов 8) во вторичные блоки управления (вторичные узлы 9), т.е., более простые датчики, измерительные элементы и исполнительные механизмы, так и в обратном направлении. Не менее важно, что интерес могут представлять данные, которые содержат информацию 10c о внутреннем состоянии программного обеспечения в первичных и/или вторичных узлах 8, 9.
Для этого, уровень 7 управления машиной содержит ведущий блок 10 и множество ведомых блоков 10a, 10b, принадлежащих ведущему, давая ему возможность выборки данных измерения (дискретизации измерений) и посылки этих данных измерения в ведущий блок 10. Можно также соответствующим образом дискретизировать и посылать обозначенные позицией 10c данные или внутренние состояния программного обеспечения. Ведущий блок 10 и ведомые блоки 10a, 10b взаимно соединены с возможностью осуществления связи посредством последовательных шин, причем конфигурация каждого ведомого блока обеспечивает посылку данных измерения в ведущий блок по упомянутым последовательным шинам. Конфигурация ведущего блока 10 обеспечивает сбор данных измерения, а система выполнена с возможностью - посредством подходящего интерфейса - осуществлять циклическую связь через предварительно заданные интервалы времени, составляющие, например 10 мс, от вторичных узлов 9 к шине 5a, 5b управления на сетевом уровне с целью посылки последовательных пакетов 11a, 11b ввода-вывода или данных в шину управления.
Можно было бы упомянуть, что известное в данной области техники решение также дает возможность - в качестве альтернативы - устанавливать связь между ведущим блоком 10 и шиной 5a, 5b управления на уровне сети любым методом, который предлагает каналы беспроводной связи для передачи данных посредством связи малого радиуса действия согласно протоколу ZigBee или Bluetooth, за счет чего оказывается возможной беспроводная посылка пакетов 11a, 11b данных из ведущего блока 10.
Следовательно, преимущество распределения ввода-вывода данных сигнала посредством пакетов данных через упомянутый ведущий узел 10 и ведомый узел 10a, 10b заключается в том, что ведомые узлы таким образом могут сообщать свой ввод-вывод (значения и статуса) центральной логике системы управления. Благодаря этому, данные ввода-вывода, собираемые ведомыми узлами в форме параметров ввода и параметров вывода, можно встроить в данные записи сигнала посредством шины 5a, 5b управления и далее посредством интерфейса 5c, 5d передачи данных в компьютер 3a.
Следует понять, что вышеописанная система 1 мониторинга является лишь возможной и что такая система на практике обычно содержит существенно больше блоков, которые за счет объединения по принципу «ведущий-ведомый» функционируют как узлы в шине 5a, 5b управления. К ним можно добавить значительное количество блоков ввода-вывода, исполнительных механизмов, датчиков и других элементов, которые соответственно потребуются для функционирования рабочей машины 1a предписываемым образом и из которых можно записать блоки данных сигнала в форме параметров ввода и параметров вывода. Из каждого первичного узла 8 циклически и через предварительно заданный интервал времени, составляющий, например, t=10 мс, посылается серия последовательных пакетов 11c, 11d данных в компьютер 3a посредством интерфейса 4 связи, который может содержать шины связи, например, Ethernet 5c или прямой связи 5d.
На фиг.3 иллюстрируется, как устанавливают блок 3 мониторинга с интерфейсом 4 передачи данных для связи с шиной 5a, 5b управления. Интерфейс 4 передачи данных может содержать вышеупомянутые шины связи, например, в форме Ethernet 5c или посредством прямой связи 5d.
В буфере 3b, 3c FIFO попеременно дискретизируют и сохраняют очередь потоков данных, последовательно создавая соответственный файл данных, id1:1 — id1:n, устанавливаемого по выбору размера, а для удобства каждый файл данных при этом может содержать около 15 минут данных сигнала высокого разрешения. Каждый файл данных, id1:1 — id1:n, содержит информацию о сигналах в текущих первичном и вторичных узлах 8, 9 и таким образом составляет некую разновидность образа процесса, pb:1 — pb1:n, т.е., точное отражение состояния процесса рабочей машины 1 в некоторый конкретный момент или интервал времени.
Как упоминалось выше, данные сигнала, сохраняемые в энергонезависимой памяти 3d поддержки данных на борту рабочей машины 1a, стираются через регулярные интервалы, например - еженедельно, когда данные больше не считаются необходимыми. Данные сигнала, id1:1 - id1:n, можно снова сохранять в локальной базе данных (БД) на борту или осуществлять их беспроводную посылку посредством средств 3e телекоммуникаций (TRANS), например - посредством Internet, в облако данных, другой узел или некоторую резервную станцию для хранения в некоторой внешней энергонезависимой памяти 3g поддержки данных, находящейся вне рабочей машины 1a в таком месте, как жесткий диск.
Как упоминалось выше, каждый файл данных, id1:1 - id1:n, создает образ процесса, pb:1 - pb1:n, содержащий информацию о сигналах из рабочей машины 1a. В соответствии с изобретением, упомянутые дискретизированные данные сигнала, id1:1 - id1:n, содержат, по существу, все данные, т.е., и параметры ввода, и параметры вывода из множества узлов, входящих в состав системы 1 управления. В целом, учитывая и сигналы ввода-вывода, и логические сигналы, отметим, что для более совершенной рабочей машины, такой, как лесозаготовительная машина, количество сигналов может в общей сложности составлять порядка 1000—5000, которые мгновенно записываются в реальном масштабе времени и таким образом - в каждый момент.
На фиг.3 схематически показано, как диагностическая и прогностическая система 13 в форме приложения или программы в ПК 3a КП на борту могут работать вместе с системой 1 мониторинга рабочей машины 1а на уровне 7 управления машиной.
Как видно, блок ПЛК или аналогичный первичный узел 8 на уровне 7 управления машиной может содержать множество параметров ввода и параметров вывода. Например, упомянутый блок 8 ПЛК может включать в себя ряд параметров 32, 34, 36, 38 вода. Параметр 32 ввода может соответствовать нажатию кнопки, обнаруживаемой ПЛК, параметры 34 и 36 ввода могут соответствовать первому относительно второго из угловых положений, обнаруживаемых датчиками угла, а параметр 38 ввода может соответствовать показанию педали. Блок ПЛК может соответственно включать в себя параметры 42 и 44 вывода. Параметр 42 вывода может соответствовать сигналу управления для регулировки клапана, а параметр 44 вывода может соответствовать сигналу управления для запуска гидравлического двигателя. Хотя на фиг.3 в возможном объекте показаны лишь четыре параметра ввода и два параметра вывода, следует понимать, что можно использовать произвольное количество параметров ввода соответственно параметрам вывода. Во время эксплуатации, коль скоро блок ПЛК или любой другой первичный узел 8 на уровне 7 управления машиной наделен значением параметров ввода, первичный узел (блок ПЛК) может генерировать соответствующие значения параметров вывода посредством встроенной логики управления и предварительно заданных алгоритмов для управления любого типа функцией рабочей машины 1a.
Соответственно, диагностическая и прогностическая система 13 на уровне мониторинга 3 может не только осуществлять мониторинг эксплуатации любого индивидуального блока или узла, содержащегося в системе 1 управления, но и - в соответствии с изобретением - проводить «безусловный» мониторинг, т.е., записывать сигналы в каждый блок либо первичный или вторичный узел и из него в систему управления, чтобы таким образом создать возможность эффективной диагностики и/или эффективного прогнозирования ошибок в эксплуатации рабочей машины 1a.
Диагностическая и прогностическая система 13 может включать в себя диагностическую модель 30 и логический модуль 35. Диагностическая модель 30 может отражать зависимость между параметрами ввода и параметрами вывода, поступающими в первичный узел - блок 8 ПЛК.
В этой связи, может оказаться уместным сравнение рабочих данных в модели 30 и логическом модуле 35, которые существенны для некоторого состояния, с опорными данными из базы данных в соответствии с некоторым предварительно определенным критерием. Таким образом, опорные данные могут состоять из данных, которые собраны соответствующим образом, как описано выше, для одной и той же или некоторой соответствующей рабочей машины 1a в разные моменты времени. Выборку результата из диагностического процесса и/или прогностического процесса можно осуществить через порт 46 для дальнейшей передачи, например - для представления водителям на мониторе 3а компьютера 3.
В качестве еще одной альтернативы, в упомянутом модуле 30 и логическом модуле 35 можно использовать некоторый аналитический инструмент таким образом, что он будет сравнивать рабочие данные из образов упомянутых процессов, pb:1 — pb1:n, с номинальными значениями, т.е., предварительно заданными стандартными значениями. Когда некоторый сигнал в образе процесса, pb:1 — pb1:n, совершает девиацию от номинального значения, узел, т.е., устройство или блок, из которого идет сигнал, считается ошибочным.
В случае обнаруженных девиаций, можно в реальном масштабе времени показать водителю «отчет об ошибках» на мониторе в кабине 1b водителя. Отчеты об ошибках также можно посылать релевантным получателям для анализа, например - фирмам-изготовителям машин. «Отчет об ошибках» может вручную посылать, например, водитель с помощью средства 3e телекоммуникаций (TRANS). В отчет об ошибках можно вносить другую существенную информацию, такую, как информация о рабочей машине, которую имеют в виду, т.е., идентификацию касательно индивидуальной машины, например, в форме серийного номера, присвоенного фирмой-изготовителем машины. В сообщение об ошибках возможно вносить и географические данные, такие, как информация о местонахождении.
В альтернативном варианте осуществления стоит рассмотреть вопрос о том, что возможна автоматическая посылка «отчета об ошибках» системой 1 управления рабочей машиной 1а в случае, если система 1 управления обнаруживает ошибку на уровне мониторинга 6. Чтобы сэкономить пространство, каждый буфер сигналов или - вследствие этого - файл данных, id1:1 - id1:n, образов процесса, pb1:1 - pb1:n, можно сохранять автоматически как ZIP-файл (архивированный файл) вместе с другими данными поиска ошибок из рабочей машины 1a. Упомянутые данные также могут содержать эксплуатационные данные, т.е., производственные или технологические данные, а значит - и данные, которые отделены от функций управления рабочей машины 1а. Упомянутые производственные или технологические данные могут содержать определенные настройки машины, производственные данные и журналы различных типов из компьютера 3a на борту.
Данное изобретение не ограничивается вышеизложенным описанием и иллюстрациями, приведенными на чертежах, а может быть уточнено и изменено разными способами в рамках концепции изобретательского замысла, изложенного в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ПРОЦЕССОВ МАШИНОЙ СОСТОЯНИЙ | 2012 |
|
RU2630383C2 |
| СИСТЕМА ИЗМЕРЕНИЯ РАБОЧЕЙ ХАРАКТЕРИСТИКИ ЛЕСОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2006 |
|
RU2427038C2 |
| Способ и система управления распределением заказов, перевозимых наземным транспортом | 2014 |
|
RU2639676C2 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ ДЛЯ НАЗНАЧЕНИЯ АДРЕСА PLC-МОДУЛЯ | 2007 |
|
RU2419825C2 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ, ОТНОСЯЩИЕСЯ К PLC | 2007 |
|
RU2419826C2 |
| РАЗВЕРТЫВАНИЕ ИНФОРМАЦИИ О КОНФИГУРАЦИИ | 2003 |
|
RU2320015C2 |
| УКАЗАНИЕ, ЗАДАНИЕ И ОБНАРУЖЕНИЕ ПАРАМЕТРОВ ДОКУМЕНТОВ ЭЛЕКТРОННЫХ ТАБЛИЦ | 2006 |
|
RU2421797C2 |
| Способ и система для оценки влияния исследуемого ПО на доступность систем промышленной автоматизации | 2020 |
|
RU2755252C2 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ, СПОСОБ ЕЕ КОНФИГУРИРОВАНИЯ И СООТВЕТСТВУЮЩИЙ УЛЬТРАЗВУКОВОЙ ДАТЧИК | 2009 |
|
RU2513097C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АУТЕНТИФИКАЦИИ КОМПОНЕНТОВ В ГРАФИЧЕСКОЙ СИСТЕМЕ | 2003 |
|
RU2310227C2 |
Изобретение относится к рабочим машинам. В способе мониторинга системы управления рабочей машины, получают параметры ввода в форме сигналов, собирают данные параметров ввода и вывода из системы управления, адресуют рабочие данные и данные измерения через шину управления. Создают файл данных, соответствующий каждой области данных, собранной за определенный временной интервал и периодически сохраняют этот файл в памяти. Создают образ процесса, сравнивают рабочие данные из образа процесса с номинальными значениями в аналитическом инструменте. Отображают отчет об ошибках в режиме реального времени водителю и посылают отчет в приемник для анализа. Добавляют отчет об ошибках к другой важной информации, такой как информация о текущей рабочей машине и географические данные. Повышается эффективность диагностики. 2 н. и 18 з.п. ф-лы, 3 ил.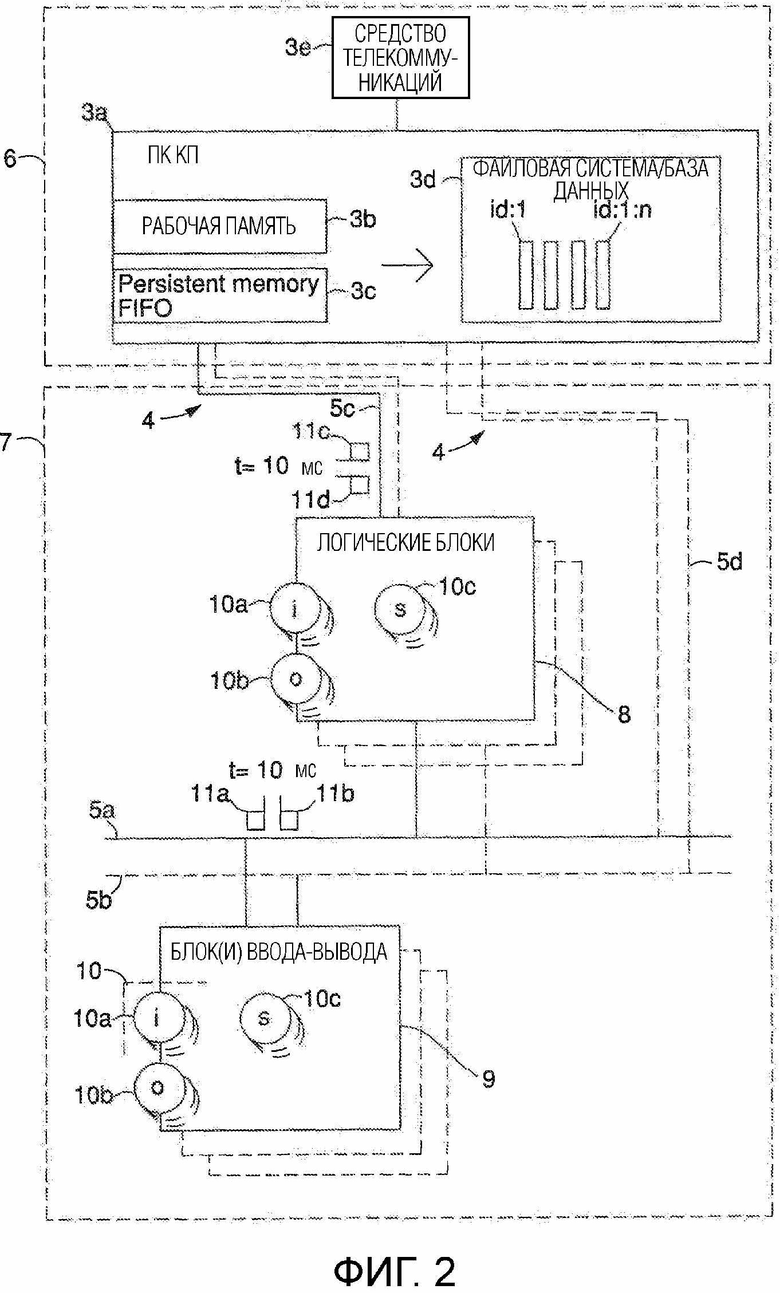
1. Способ мониторинга системы (1) управления рабочей машины (1a), содержащий следующий этап, на котором
из системы управления получают множество параметров (32, 34, 36, 38, 10a) ввода в форме сигналов, вследствие чего система управления генерирует действительные значения по одному или более параметрам (42, 44, 10b) вывода в форме сигналов на основе упомянутого множества параметров ввода;
отличающийся тем, что:
- собирают в реальном масштабе времени цифровой поток данных, содержащий как упомянутые параметры ввода, так и параметры вывода (32, 34, 36, 38, 10a; 42, 44, 10b), из системы (1) управления;
- адресуют цифровой поток рабочих данных и данных измерения через шину (5a, 5b) управления, входящую в состав системы (1) управления, и интерфейс (4) к области данных в рабочей памяти (3b) или памяти (3c) на элементах с захваченным потоком, которая входит в состав персонального компьютера (3a) на борту рабочей машины (1a);
- создают файл данных (id1:1-id1:n), соответствующий каждой области данных, собранной за определенный временной интервал;
- периодически сохраняют файл (id1:1-id1:n) данных, соответствующий области данных, в энергонезависимой памяти (3d) поддержки данных на борту рабочей машины или передают через средство (3e) телекоммуникаций и сохраняют во внешней энергонезависимой памяти (3g) поддержки данных,
- создают образ (pb1-pb:1n) процесса, который обеспечивает изображение состояния системы управления в течение определенного временного интервала, путем присвоения каждому инициируемому файлу (id1:1-id1) данных функции хранения журнала,
- сравнивают рабочие данные из образа (pb:1-pb1) процесса с номинальными значениями в аналитическом инструменте (30, 35), и сигнал девиации в образе процесса, который исходит при девиации из узла в виде устройства или блока, считается неправильным, и каждая обнаруженная девиация генерирует отчет об ошибках,
при этом осуществляют, по меньшей мере, один из следующих этапов процесса:
a) отображают отчет об ошибках в режиме реального времени водителю на мониторе в кабине (1b), входящей в рабочую машину;
b) посылают отчет об ошибках с помощью средства (3e) телекоммуникаций в соответствующий приемник для анализа, например производителю машины, причем отчет об ошибках может быть послан вручную, например, водителем, или автоматически через уровень (6) мониторинга, включенный в систему (1) управления;
c) добавляют отчет об ошибках к другой важной информации, прежде чем он будет послан с помощью средства телекоммуникаций получателю для анализа, причем указанная информация может включать в себя любое из следующего:
c1) информацию о текущей рабочей машине, такую как идентификация отдельной машины;
c2) географические данные, такие как информация о местоположении.
2. Способ по п.1, отличающийся тем, что в качестве области данных в рабочей памяти используют буферную память (3b, 3c) оперативного запоминающего устройства (ОЗУ), которая в режиме «первым пришел-первым вышел» (FIFO) записывает файл (id1:1-id1:n) данных предварительного определенного размера, состоящий из потока поступающих новых рабочих данных и данных измерения, перезаписываемых поверх эксплуатационных данных и данных измерения в эквивалентно созданном более старом файле данных в упомянутом буфере; при этом копию созданного файла данных, который содержится в упомянутой буферной памяти ОЗУ, сохраняют в энергонезависимой памяти (3d) поддержки данных на борту рабочей машины (1a) или с помощью средства (3e) телекоммуникаций, предусматривающего передачу и сохранение во внешней энергонезависимой памяти (3g) поддержки данных.
3. Способ по п.1 или 2, отличающийся тем, что в качестве интерфейса (4) связи между шиной (5a, 5b) управления и компьютером (3a) используют шину (5c, 5d) связи, например - Ethernet или прямую связь.
4. Способ по любому из пп.1-3, отличающийся тем, что в дополнение к цифровому потоку эксплуатационных данных и данных измерения параметров ввода и параметров вывода (32, 34, 36, 38, 10a; 42, 44, 10b) осуществляют выборку внутреннего состояния или данных (10c) программного обеспечения из совокупности первичных узлов (8), а также вторичных узлов (10a, 10b), которые входят в состав системы (1) управления.
5. Способ по любому из пп.1-4, отличающийся тем, что цифровой поток эксплуатационных данных и данных измерения параметров ввода и параметров вывода (32, 34, 36, 38, 10a; 42, 44, 10b) содержит сигналы, сбор которых осуществляют в реальном масштабе времени и которые записывают из совокупности первичных узлов (8), а также вторичных узлов (10a, 10b), в системе (1) управления.
6. Способ по любому из пп.1-5, отличающийся тем, что в системе (1) управления используют ведущего (10), соединенного с одним ведомым или множеством ведомых (10a, 10b), включенных в число вторичных узлов (9), осуществляющего связь с персональным компьютером (3a) посредством циклической - через некоторый предварительно заданный интервал времени, например, t=10 мс - посылки серии последовательных пакетов ввода-вывода или пакетов (11a, 11b) данных.
7. Способ по п.6, отличающийся тем, что посылают пакеты (11a, 11b) данных из ведущего (10) в системе (1) управления через некую разновидность канала беспроводной связи для передачи данных посредством связи малого радиуса действия, такой как соответствующая протоколу Wi-Fi, ZigBee или Bluetooth.
8. Способ по любому из пп.1-7, отличающийся тем, что функция хранения журнала содержит временной маркер, который с помощью часов присваивается каждому инициируемому файлу (id:1:1-id1:n) данных с помощью так называемого средства (3f) регистрации.
9. Способ по любому из пп.1-8, отличающийся тем, что любую девиацию для соответствующих сигналов между, по меньшей мере, одним из упомянутых параметров (32, 34, 36, 38, 10a) ввода или параметров (42, 44, 10b) вывода сравнивают и идентифицируют по отношению к предыдущему и впоследствии созданному файлу (id1:1 — id1:n) данных.
10. Способ по п.9, отличающийся тем, что требуемую ширину полосы снижают за счет адресации лишь сигналов, которые изменены в соответствии со сравнением, т.е. сигналов, которые совершают девиацию относительно предыдущего управления, в компьютер (3а) из шины (5a, 5b) управления.
11. Способ по п.5, отличающийся тем, что зависимость между параметрами (32, 34, 36, 38, 10a) ввода и параметрами (42, 44; 10b) вывода отражают посредством диагностической модели (30) с помощью связанного с ней логического модуля (35).
12. Способ по п.11, отличающийся тем, что используемые диагностическую модель (30) и логический модуль (35) составляют из компьютерной программы (13) или приложения, которую или которое устанавливают на компьютере (3a) на борту.
13. Способ по любому из пп.1-12, отличающийся тем, что персональный компьютер (3a) на борту используют с целью комбинированного манипулирования обработкой эксплуатационно-производственных или технологических данных для рабочей машины (1a), а также записи и буферизации цифрового потока эксплуатационных данных и данных измерения, содержащего упомянутые параметры (32, 34, 36, 38, 10a) ввода и параметры (42, 44; 10b) вывода, из системы (1) управления.
14. Рабочая машина, в частности лесозаготовительная машина, содержащая:
- систему (1) управления с уровнем (7) управления машиной;
- систему мониторинга с уровнем (6) мониторинга;
- одну или более шин (5a, 5b) управления, например, типа шины сети локальных контроллеров (СЛК);
- один или множество первичных и вторичных узлов (8, 9), выполненных с возможностью выполнения функций обращения с рабочей машиной и управления ею путем использования действительных значений по параметрам (42, 44; 10b) вывода на основе множества параметров (32, 34, 36, 38, 10a) ввода,
при этом система мониторинга на упомянутом уровне (6) мониторинга содержит:
- компьютер (3a), такой как персональный компьютер (ПК) с емкостью для хранения данных;
- интерфейс (4), посредством которого компьютер (3a) находится в обеспечивающем передачу соединении через упомянутую одну или более шин (5a, 5b) управления;
- рабочую память (3a, 3b);
- энергонезависимую память (3d) поддержки данных, отличающаяся тем, что
цифровой поток эксплуатационных данных и данных измерения, содержащий упомянутые параметры (32, 34, 36, 38, 10a) ввода, а также параметры (42, 44; 10b) вывода, из первичных и вторичных узлов (8, 9) является адресуемым в буфер в рабочей памяти (3a, 3b), который в режиме «первый пришел - первый вышел» (FIFO) позволяет создавать файл (id1:1-id1:n) данных предварительного определенного размера, состоящий из потока поступающих новых данных, перезаписываемых поверх данных в эквивалентно созданном более старом файле данных в упомянутом буфере; и
копия созданного файла данных, который содержится в упомянутой рабочей памяти, является сохраняемой в энергонезависимой памяти (3d) поддержки данных,
причем имеется аналитический инструмент (30, 35), в котором рабочие данные из образа (pb:1-pb1) процесса могут сравниваться с номинальными значениями, и сигнал девиации в образе процесса, который выводится из узла в виде устройства или блока при девиации, считается неправильным, и каждая обнаруженная девиация генерирует отчет об ошибках, и
кабина (1b) водителя, в которой установлен монитор, на котором отчет об ошибках может отображаться водителю в режиме реального времени,
- средство (3e) телекоммуникаций, с помощью которого отчет об ошибках может быть послан соответствующему приемнику для анализа, например производителю машины, причем отчет об ошибках может быть послан вручную, например, водителем, или автоматически через уровень (6) мониторинга, входящий в систему (1) управления,
средство, с помощью которого отчет об ошибках может быть добавлен к другой важной информации, прежде чем он будет послан с помощью средства телекоммуникаций соответствующему получателю для анализа, причем эта информация может включать, по меньшей мере, одно из следующего;
- информацию о текущей рабочей машине, такую как идентификация отдельной машины;
- географические данные, такие как информация о местоположении.
15. Рабочая машина по п.14, отличающаяся тем, что интерфейс (4) для передачи данных между компьютером (3a) и шиной (5a, 5b) управления содержит специализированную шину связи, например - Ethernet.
16. Рабочая машина по п.14 или 15, отличающаяся тем, что рабочая память компьютера (3а) содержит буферную память оперативного запоминающего устройства (ОЗУ) и связанный с ней блок, работающий в режиме «первым пришел - первым вышел» (FIFO), а цифровой поток параметров (32, 34, 36, 38, 10a) ввода и параметров (42, 44; 10b) вывода адресуется в упомянутую буферную память (3a, 3b) ОЗУ, так что режим FIFO создает упомянутый файл (id1:1—id1:n) данных.
17. Рабочая машина по любому из пп.14-16, отличающаяся тем, что компьютер (3a) находится на борту рабочей машины (1a).
18. Рабочая машина по любому из пп.14-17, отличающаяся тем, что энергонезависимая память (3d) поддержки данных находится на борту рабочей машины (1a).
19. Рабочая машина по любому из пп.14-18, отличающаяся тем, что она содержит средство (3e), которое делает возможной - посредством телекоммуникаций - передачу созданных файлов (id1:1—id1:n) данных из рабочей машины (1a), например, для хранения во внешней энергонезависимой памяти (3g) поддержки данных.
20. Рабочая машина по любому из пп.14-19, отличающаяся тем, что персональный компьютер (3а) на борту содержит компьютерную программу или приложения, которая или которые обеспечивают комбинированное манипулирование обработкой эксплуатационно-производственных или технологических данных для рабочей машины (1a) и их хранение, а также запись и буферизацию цифровых потоков данных сигнала, содержащих эксплуатационные данные и данные измерения, содержащие упомянутые параметры (32, 34, 36, 38, 10a) ввода и параметры (42, 44; 10b) вывода, из системы (1) управления.
| US 2017249788 A1, 31.08.2017 | |||
| US 2003216889 А1, 20.11.2003 | |||
| US 2017092018 A1, 30.03.2017 | |||
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПРОБОДНЫХ ГАСТРОДУОДЕНАЛЬНЫХ ЯЗВ | 2003 |
|
RU2230502C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ПРОБОДНЫХ ГАСТРОДУОДЕНАЛЬНЫХ ЯЗВ | 2003 |
|
RU2230502C1 |
| EP 1923289 A2, 21.05.2008 | |||
| WO 2005068262 A1, 28.07.2005 | |||
| Способ формообразования изделий двойной кривизны из листа | 1988 |
|
SU1616746A1 |
| US 2010228423 A1, 09.09.2010 | |||
| US 2003050747 A1, 13.03.2003. | |||

