Заявка на изобретение относится к медицинской технике и предназначена для аспирации верхних дыхательных путей и легких пациентов при проведении хирургических операций, при реанимационных мероприятиях и искусственной вентиляции легких на месте происшествия и (или) транспортирования в условиях скорой медицинской помощи.
В современной медицине аспираторы (отсасыватели) являются одной из наиболее востребованных и в какой-то степени незаменимых категорий медицинского оборудования. Чаще всего аспираторы приобретаются для хирургических отделений, хотя есть и другие сферы их применения: гинекология, неонатология, пульмонология, косметология и др. Портативные аспираторы отличаются компактными размерами и небольшим весом. Неоспоримым преимуществом таких аспираторов является возможность их быстрой и удобной переноски, что расширяет область их применения. Еще одним актуальным направлением являются портативные модели аспираторов со встроенными аккумуляторами, а также с возможностью работы от прикуривателя в автомобиле. Такие аспираторы необходимы не только в медицинских стационарах, но и при внутри и межбольничных перевозках тяжёлых пациентов, в машинах скорой медицинской помощи и в полевых условиях.
К сожалению, имеющиеся на рынке портативные электрические аспираторы не обеспечивают желаемых параметров для комфортного применения в транспортных средствах и полевых условиях ввиду большого энергопотребления и, соответственно, значительных габаритов и веса.
Наиболее близким к нашей заявке является медицинский отсасыватель (RU 2157248 C1, кл. А61М1/00, 2000 г), принятый за прототип, содержащий задатчик разрежения, датчик разрежения, а также последовательно соединенные электродвигатель, вакуум-насос, ресивер, магистраль для подключения емкости для сбора жидкости, при этом вход датчика разрежения соединен с выходом вакуум-насоса. Для уменьшения амплитуды пульсаций величины разрежения и расширения функциональных возможностей отсасывателя, увеличения ресурса работы, уменьшения уровня шума и уменьшения габаритов и массы в него введены регулятор разрежения, функциональный преобразователь, сумматор, широтно-импульсный преобразователь, усилитель мощности, датчик тока и активный фильтр.
К числу недостатков данного электрического медицинского отсасывателя, как и многих других, следует отнести:
1. работу электродвигателя на максимальных оборотах в моменты простоя, когда в системе не создается разрежение, что увеличивает энергопотребление и снижает КПД устройства;
2. необходимость иметь запас по производительности вакуум-насоса для обеспечения заданного разряжения при питании от нестабильного источника энергии, что приводит к увеличению массы и габаритов вакуумного насоса и, соответственно, увеличению массы и габаритов устройства.
В практической медицине при проведении аспирационных мероприятий непосредственно процесс аспирации (отсасывание жидкости) занимает, как правило, не более 50% времени включения питания аспиратора. Остальное время, это подготовка и другие манипуляции. Поэтому существует хороший резерв снижения электропотребления, если на время простоя (отсутствия аспирации) снизить уровень напряжения, подаваемого на электродвигатель вакуум-насоса.
Другим резервом снижения энергопотребления и, соответственно, габаритов и веса устройства является стабилизация номинального уровня напряжения электродвигателя вакуум-насоса, при питании от нестабильного источника постоянного тока (борт-сеть автомобиля, аккумуляторная батарея) для исключения требования к вакуум-насосу по запасу его мощности при снижении уровня напряжения питания.
Решаемой технической проблемой является снижение требований к аспиратору по энергопотреблению и уменьшение весогабаритных характеристик изделия без ухудшения медико-технических характеристик.
Техническим результатом изобретения является:
1. уменьшение энергопотребления электродвигателя вакуум-насоса в моменты простоя, когда в системе не создается разрежение, и, соответственно, снижение веса и габаритов устройства;
2. обеспечение постоянства рабочих характеристик устройства как при работе от автономного источника питания, так и в условиях питания от внешнего источника постоянного тока (например, борт-сети автомобиля скорой медицинской помощи), при значительных колебаниях уровня напряжения источников, что также дополнительно позволяет снизить вес и габариты устройства;
3. обеспечение режимов непрерывной и автономной работы устройства.
Технический результат достигается за счет того, что аспиратор медицинский портативный включает электродвигатель, соединенный с вакуум-насосом, задатчик разрежения и датчик разрежения, вход которого соединен с выходом вакуум-насоса, панель индикации с кнопкой включения, а также воздушный фильтр, емкость для сбора жидкости, шланг и пластиковый наконечник. Согласно изобретению, аспиратор дополнительно содержит блок управления, включающий последовательно соединенные аналогово-цифровой преобразователь, процессор и цифровой широтно-импульсный преобразователь. Устройство содержит линию подключения внешнего источника питания и блок автономного источника питания, которые последовательно соединены с блоком переключения источников питания и импульсным повышающе-понижающим преобразователем напряжения, выход последнего соединен с входом блока зарядки и балансировки автономного источника питания, последовательно соединенного с автономным источником питания, и с входом драйвера электродвигателя постоянного тока, который последовательно соединен с электродвигателем. Первый, второй и третий управляющие выходы блока управления подключены соответственно к управляющим входам блока переключения источников питания, импульсному повышающе-понижающему преобразователю напряжения и драйверу электродвигателя постоянного тока, а аналоговые входы блока управления соединены соответственно с аналоговыми выходами датчика разрежения и задатчика разрежения. Блок управления также соединен двунаправленными линиями управления с блоком зарядки и балансировки автономного источника питания и панелью индикации с кнопкой включения. К выходу вакуум-насоса последовательно подключены воздушный фильтр, емкость для сбора жидкости, шланг и пластиковый наконечник.
Аналоговые входы блока управления (которые являются аналоговыми входами аналогово-цифрового преобразователя) соответственно подключенные к аналоговым выходам датчика разрежения и задатчика разрежения, а также управляющий выход блока управления, подключенный к управляющему входу драйвера электродвигателя, позволяют уменьшить энергопотребление вакуумного насоса в моменты простоя, когда в системе не создается разрежение (система открыта), за счет снижения его производительности до 50% от максимального значения в зоне слабого разрежения (зона слабого разрежения принята в диапазоне от 0 до 50 мм рт.ст.), посредством изменения величины коэффициента заполнения управляющего широтно-импульсного (ШИМ) сигнала, подаваемого на вход драйвера электродвигателя постоянного тока, что в свою очередь изменяет скорость вращения электродвигателя, соединенного с вакуумным насосом, и, как следствие, изменяет его производительность, реализуя тем самым алгоритм энергосбережения.
Введение импульсного повышающе-понижающего преобразователя напряжения позволило обеспечить постоянство максимальной производительности вакуумного насоса (постоянство уровня напряжения, подаваемого на электродвигатель, соединенный с вакуумным насосом) не зависимо от уровня заряда (уровня напряжения) внутреннего автономного источника питания, а также в широком диапазоне значений внешнего питающего напряжения, что исключило необходимость иметь запас по производительности вакуумного насоса и, соответственно, позволило снизить вес и габариты вакуумного насоса, а, следовательно, и аспиратора в целом.
Введение в устройство аспиратора линии подключения внешнего источника питания и блока автономного источника питания, последовательно соединенных с блоком переключения источников питания, импульсным повышающе-понижающим преобразователем напряжения и блоком зарядки и балансировки автономного источника питания, позволило обеспечить режимы непрерывной и автономной работы вакуумного насоса, за счет переключения между источниками питания без остановки его работы, а также возможности заряжать внутренний автономный источник питания, для накопления заряда и его отдачи, когда отсутствует подключение к внешнему источнику питания. Переключение блоков электрической схемы, для реализации описанных режимов, осуществляется с помощью управляющих линий связи от блока управления.
Наличие управляющей лини связи от блока управления до повышающе-понижающего преобразователя напряжения позволяет переключать на его выходе уровень напряжения в два значения, первое значение соответствует уровню напряжения необходимого для работы электродвигателя, соединенного с вакуумным насосом, а второе значение соответствует уровню напряжения, необходимого для работы блока зарядки и балансировки автономного источника питания.
Управляющие выходы блока управления позволяют включать/выключать драйвер электродвигателя постоянного тока и включать/выключать блок зарядки и балансировки автономного источника питания, для возможности их переключения (включения только одного из блоков) и реализации двух режимов работы электрической схемы: работы вакуумного насоса и процесса зарядки автономного источника питания.
Наличие у блока управления двунаправленной линии связи с блоком зарядки и балансировки автономного источника питания обусловлено необходимостью как управлять процессом зарядки, так и получать данные о текущем состоянии процесса зарядки автономного источника питания. Двунаправленная линия связи с панелью индикации и кнопкой включения предусмотрена для осуществления процесса включения/выключения прибора, а также отображения текущего состояния и режима работы прибора с помощью отдельных статусных светодиодов, и величины вакуума в магистрали с помощью шкалы, выполненной в виде линейки светодиодов.
Аспиратор медицинский портативный иллюстрируется следующими чертежами, где на фиг. 1 представлена блок-схема устройства; на фиг. 2 – реализация блока управления 9.
На чертежах позициями обозначено:
1 - линия подключения внешнего источника питания;
2 - блок автономного источника питания;
3 - блок переключения источников питания;
4 - импульсный повышающе-понижающий преобразователь напряжения;
5 - драйвер электродвигателя постоянного тока;
6 - блок зарядки и балансировки автономного источника питания;
7 - электродвигатель постоянного тока;
8 - вакуумный насос;
9 - блок управления;
10 - датчик разрежения;
11 - задатчик разрежения;
12 - панель индикации с кнопкой включения;
13 - воздушный фильтр;
14 - емкость-сборник;
15 - шланг;
16 - пластиковый наконечник;
17 - аналогово-цифровой преобразователь (АЦП);
18 - процессор;
19 - цифровой широтно-импульсный преобразователь;
20 - первый управляющий выход блока управления с управляющим входом блока переключения источников питания;
21 - второй управляющий выход блока управления с управляющим входом импульсного повышающе-понижающего преобразователя напряжения;
22 - третий управляющий выход блока управления с входом драйвера электродвигателя постоянного тока;
23 - аналоговый вход блока АЦП от аналогового выхода датчика разрежения;
24 - аналоговый вход АЦП с аналоговым выходом задатчика разрежения;
25 - двунаправленная линия связи блока управления с блоком зарядки и балансировки автономного источника питания;
26 - двунаправленная линия связи блока управления с панелью индикации и кнопкой включения.
Аспиратор медицинский портативный работает следующим образом.
При нажатии на кнопку включения на панели 12 индикации, процессор 18 блока 9 управления подает с первого управляющего выхода 20 управляющий сигнал на управляющий вход блока 3 переключения источников питания (который может быть выполнен в виде набора транзисторов или электромагнитного реле), и подключает к входу импульсного повышающе-понижающего преобразователя 4 напряжения (который может быть выполнен по топологии SEPIC - Single Ended Primary Inductance Converter) линию 1 внешнего источника питания или блок 2 автономного источника питания (при наличии подключенного внешнего источника питания приоритет отдается ему, для сохранения накопленной энергии в автономном источнике питания). Далее процессор 18 блока 9 управления подает со второго выхода 21 управляющий сигнал на управляющий вход импульсного повышающе-понижающего преобразователя 4 напряжения, тем самым переключая величину сопротивления резистивного делителя обратной связи в значение, обеспечивающее на его выходе уровень напряжения соответствующий рабочему для электродвигателя 7 постоянного тока, соединенного с вакуумным насосом 8. Аналоговые сигналы в виде уровней напряжения с выхода датчика разрежения 10 (который может быть выполнен в виде датчика XGZP101), и с выхода задатчика 11 разрежения, (который может быть выполнен в виде переменного резистора), подаются соответственно на 23 и 24 аналоговые входы аналогово-цифрового преобразователя 17 блока 9 управления, которые оцифровываются и в виде численных значений подаются на вход процессора 18, полученные значения обрабатываются и вычисляется численное значение управляющего ШИМ сигнала, которое поступает на вход цифрового широтно-импульсного преобразователя 19, на выходе которого формируется соответствующий ШИМ сигнал, который по третьему управляющему выходу 22 блока 9 управления подается на управляющий вход драйвера 5 электродвигателя постоянного тока. Драйвер 5 электродвигателя постоянного тока производит пуск и управляет скоростью вращения электродвигателя 7 постоянного тока, таким образом, регулируется производительность вакуумного насоса 8. Драйвер 5 электродвигателя постоянного тока может быть выполнен в виде силового транзистора и микросхемы драйвера затвора транзистора. Блок 9 управления, содержащий последовательно соединенные аналогово-цифровой преобразователь 17, процессор 18 и цифровой широтно-импульсный преобразователь 19, является программируемым устройством и может быть выполнен на основе микросхемы ATmega 8.
Работа блока 9 управления осуществляется по специально разработанной программе, для управления аспиратором медицинским портативным.
Алгоритм регулирования скорости вращения электродвигателя 7 постоянного тока реализует режим энергосбережения, за счет снижения производительности вакуумного насоса 8 в моменты простоя, когда в системе не создается разрежение (система открыта), а также при достижении порога, установленного задатчиком 11 разрежения и в моменты, когда срабатывает поплавок, перекрывающий выход емкости-сборника 14 при ее наполнении.
Алгоритм реализует следующую логику.
Диапазон разрежения, задаваемый задатчиком 11 разрежения, разбивается на две части: зону слабого разрежения и рабочую зону разрежения в диапазоне от верхней границы зоны слабого разрежения до порога выставленного задатчиком 11 разрежения. Зона слабого разрежения принята в диапазоне от 0 до 50 мм рт.ст. Диапазон зоны слабого разрежения может иметь другие границы главное, чтобы выполнялось условие: верхняя граница диапазона слабого разрежения должна быть меньше минимального значения, выставляемого задатчиком 11 разрежения (т.е. диапазоны не должны пересекаться).
Далее считывается аналоговый сигнал с выхода датчика 10 разрежения. Если текущее значение разрежения находится в нижней точке зоны слабого разрежения (0 мм рт.ст.), процессор 18 формирует численное значение управляющего ШИМ сигнала соответствующего производительности вакуумного насоса 8 на уровне 50%, по мере роста величины разрежения вплоть до верхней границы зоны слабого разрежения (50 мм рт.ст.), процессор 18 пропорционально повышает производительность вакуумного насоса 8 до уровня 100%. При переходе в рабочую зону разрежения осуществляется регулирование производительности вакуумного насоса 8 в диапазоне от 0 до 100% для поддержания заданного задатчиком 11 порога разрежения.
Величина ШИМ сигнала нижней границы зоны слабого разрежения принятая за 50% (соответствующая производительности вакуумного насоса 8 на уровне 50%) может иметь другое значение, как большее, так и меньшее и подбирается индивидуально для конкретного типа вакуумного насоса, данное значение должно обеспечивать достаточную стартовую производительность для создания разрежения в границах зоны слабого разрежения. Максимальное значение разрежения, создаваемое в магистрали, регулируется с помощью задатчика 11 разрежения. Пример работы алгоритма энергосбережения иллюстрируется на фиг. 3.
Если во время работы прибора от линии 1 внешнего источника питания уровень напряжения выходит за пределы рабочего диапазона или внешний источник питания отключается от прибора, блок 9 управления автоматически подключает на вход импульсного повышающе-понижающего преобразователя 4 напряжения блок 2 автономного источника питания, продолжая работу прибора.
При повторном нажатии на кнопку включения на панели 12 индикации, блок 9 управления производит остановку электродвигателя 7 постоянного тока, при этом, если к линии 1 подключен внешний источник питания, блок 9 управления переключает управляющие выходы для осуществления процесса зарядки блока 2 автономного источника питания. Для этого блок 9 управления подает с первого выхода 20 управляющий сигнал на управляющий вход блока 3 переключения источников питания и подключает к входу импульсного повышающе-понижающего преобразователя 4 напряжения линию 1 подключения внешнего источника питания. Далее для получения уровня напряжения, необходимого для зарядки и балансировки блока 2 автономного источника питания, блок 9 управления подает со второго выхода 21 управляющий сигнал на управляющий вход импульсного повышающе-понижающего преобразователя 4 напряжения, переключая величину сопротивления резистивного делителя обратной связи и, подав с выхода 25 управляющий сигнал, включает блок 6 зарядки и балансировки автономного источника питания. Также блок 9 управления запускает процесс зарядки и балансировки блока 2 автономного источника питания автоматически при подключении источника напряжения к линии 1 внешнего источника питания без нажатия на кнопку включения на панели 12 индикации при условии, что в данный момент электродвигатель 7 постоянного тока выключен.
Текущее состояние и режим работы прибора отображается на панели 12 индикации с помощью отдельных статусных светодиодов (на фиг. не показано), а величина разрежения в магистрали с помощью шкалы, выполненной в виде линейки светодиодов (на фиг. не показано).
Заявленный аспиратор медицинский портативный обеспечивает уменьшение энергопотребления, постоянство рабочих характеристик при питании от нестабильных источников постоянного тока (борт-сеть автомобиля, аккумуляторная батарея), непрерывный и автономный режимы работы, имеет существенно уменьшенные вес и габариты, что в совокупности повышает удобство и эффективность процедуры аспирации при проведении хирургических манипуляций, реанимационных мероприятий и искусственной вентиляции легких, а также расширяет сферу применения аспиратора для оказания экстренной помощи при транспортной эвакуации, внутри и межбольничных перемещениях, непосредственно на месте происшествия (в полевых условиях, на улице, на дому).
В настоящее время изготовлены опытные образцы и готовится серийное производство прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аспиратор портативный | 2023 |
|
RU2813050C1 |
| УСТРОЙСТВО ДЛЯ ВАКУУМНОГО МАССАЖА | 1994 |
|
RU2077879C1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ АППАРАТУРЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2534028C1 |
| ДРАЙВЕРНОЕ УСТРОЙСТВО ПОСТОЯННОГО ТОКА, ИМЕЮЩЕЕ ВХОДНОЙ И ВЫХОДНОЙ ФИЛЬТРЫ, ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ НАГРУЗКИ, В ЧАСТНОСТИ, БЛОКА СВЕТОДИОДОВ | 2012 |
|
RU2588580C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ | 2015 |
|
RU2678774C2 |
| Устройство электроэнергетической системы питания автономного необитаемого подводного аппарата с гибридной энергетической установкой | 2019 |
|
RU2726383C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ЗАДВИЖКИ ИЛИ КЛАПАНА | 2007 |
|
RU2442924C2 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ИСТОЧНИКА ПИТАНИЯ ПОСТОЯННОГО ТОКА | 2016 |
|
RU2729882C2 |
| УСТАНОВКА КРИСТАЛЛИЗАЦИИ РАСПЛАВА ЛЕЙКОСАПФИРА | 2007 |
|
RU2341593C1 |

Изобретение относится к медицинской технике, а именно к аспиратору медицинскому портативному. Аспиратор содержит электродвигатель, задатчик разрежения и датчик разрежения, панель индикации с кнопкой включения, воздушный фильтр, емкость для сбора жидкости, шланг и пластиковый наконечник, блок управления, линию подключения внешнего источника питания и блок автономного источника питания. Электродвигатель соединен с вакуум-насосом (8). Вход датчика разрежения (10) соединен с выходом вакуум-насоса. Блок управления (9) включает последовательно соединенные аналогово-цифровой преобразователь (17), процессор (18) и цифровой широтно-импульсный преобразователь (19). Линия (1) подключения внешнего источника питания и блок (2) автономного источника питания последовательно соединены с блоком (3) переключения источников питания и импульсным повышающе-понижающим преобразователем напряжения (4). Выход преобразователя напряжения соединен с входом блока (6) зарядки и балансировки автономного источника питания и с входом драйвера электродвигателя постоянного тока. Блок зарядки и балансировки автономного источника питания последовательно соединен с автономным источником питания. Драйвер (5) электродвигателя постоянного тока последовательно соединен с электродвигателем (7). Три управляющих выхода (20, 21, 22) блока управления подключены соответственно к управляющим входам блока переключения источников питания, импульсному повышающе-понижающему преобразователю напряжения и драйверу электродвигателя постоянного тока. Аналоговые входы блока управления соединены соответственно с аналоговыми выходами (23, 24) датчика разрежения и задатчика разрежения (11). Блок управления соединен двунаправленными линиями (25, 26) управления с блоком зарядки и балансировки автономного источника питания и панелью индикации (12) с кнопкой включения. К выходу вакуум-насоса последовательно подключены воздушный фильтр (13), емкость (14) для сбора жидкости, шланг (15) и пластиковый наконечник (16). Обеспечивается уменьшение энергопотребления электродвигателя вакуум-насоса в моменты простоя, когда в системе не создается разрежение, постоянство рабочих характеристик устройства при работе от автономного источника питания и в условиях питания от внешнего источника постоянного тока при колебаниях уровня напряжения источников, уменьшаются вес и габариты устройства, обеспечиваются режимы непрерывной и автономной работы устройства. 2 ил.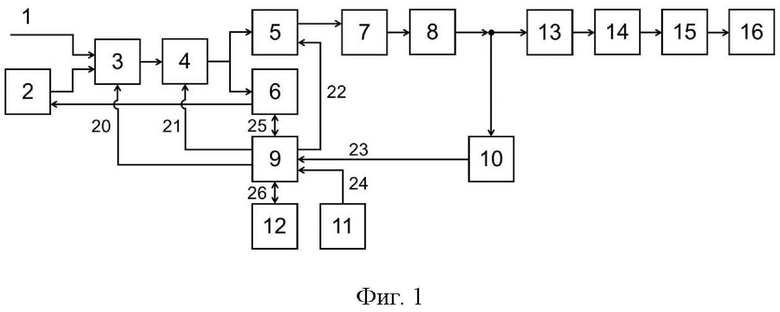
Аспиратор медицинский портативный, включающий электродвигатель, соединенный с вакуум-насосом, задатчик разрежения и датчик разрежения, вход которого соединен с выходом вакуум-насоса, панель индикации с кнопкой включения, а также воздушный фильтр, емкость для сбора жидкости, шланг и пластиковый наконечник, отличающийся тем, что он дополнительно содержит блок управления, включающий последовательно соединенные аналогово-цифровой преобразователь, процессор и цифровой широтно-импульсный преобразователь, кроме того, устройство также содержит линию подключения внешнего источника питания и блок автономного источника питания, которые последовательно соединены с блоком переключения источников питания и импульсным повышающе-понижающим преобразователем напряжения, выход последнего соединен с входом блока зарядки и балансировки автономного источника питания, последовательно соединенного с автономным источником питания, и с входом драйвера электродвигателя постоянного тока, который последовательно соединен с электродвигателем, при этом первый, второй и третий управляющие выходы блока управления подключены соответственно к управляющим входам блока переключения источников питания, импульсному повышающе-понижающему преобразователю напряжения и драйверу электродвигателя постоянного тока, а аналоговые входы блока управления соединены соответственно с аналоговыми выходами датчика разрежения и задатчика разрежения, блок управления также соединен двунаправленными линиями управления с блоком зарядки и балансировки автономного источника питания и панелью индикации с кнопкой включения, кроме того, к выходу вакуум-насоса последовательно подключены воздушный фильтр, емкость для сбора жидкости, шланг и пластиковый наконечник.
| МЕДИЦИНСКИЙ ОТСАСЫВАТЕЛЬ | 1999 |
|
RU2157248C1 |
| АЭРОЗОЛЬНЫЙ АСПИРАТОР И СПОСОБ ВСАСЫВАНИЯ АЭРОЗОЛЯ | 2007 |
|
RU2411047C2 |
| US 2018147329 A1, 31.05.2018 | |||
| MX 2009003284 A, 09.02.2010 | |||
| US 2011224600 A1, 15.09.2011 | |||
| US 4493698 A, 15.01.1985. | |||

