Родственные заявки
[0001] Настоящая заявка на патент испрашивает приоритет патентной заявки США порядковый номер 16/134,068, озаглавленной "Multi-Channel LIDAR Illumination Driver", поданной 18 сентября 2018 года, которая содержится в данном документе по ссылке в своей полноте.
Область техники, к которой относится изобретение
[0002] Описанные варианты осуществления относятся к LIDAR-системам измерения с 3D-облаком точек.
Информация об уровне техники
[0003] LIDAR-системы применяют импульсы света для измерения расстояния до объекта на основе времени пролета (TOF) каждого импульса света. Импульс света, испускаемый из источника света LIDAR-системы, взаимодействует с отдаленным объектом. Часть света отражается от объекта и возвращается к детектору LIDAR-системы. На основе времени, прошедшего между испусканием импульса света и обнаружением вернувшегося импульса света, рассчитывается расстояние. В некоторых примерах импульсы света формируются посредством лазерного излучателя. Импульсы света фокусируются через линзу или линзовый узел. Время, которое занимает у импульса лазерного света возврат к детектору, установленному рядом с излучателем, измеряется. Расстояние получается из измерения времени с высокой точностью.
[0004] Некоторые LIDAR-системы применяют единственный лазерный излучатель/детектор, объединенный с вращающимся зеркалом, чтобы эффективно осуществлять сканирование по плоскости. Измерения расстояния, выполняемые посредством такой системы, являются фактически двухмерными (т.е., плоскостными), и захваченные точки расстояния воспроизводятся как 2D-облако (т.е., в единственной плоскости) точек. В некоторых примерах вращающиеся зеркала вращаются с очень быстрыми скоростями (например, тысячи оборотов в минуту).
[0005] Во многих сценариях работы требуется 3D-облако точек. Ряд схем был применен для исследования окружающей обстановки в трех измерениях. В некоторых примерах 2D-инструмент приводится в действие вверх и вниз и/или взад и вперед, часто на карданном подвесе. Это является общеизвестным в данной области техники как "мигающий" или "кивающий" датчик. Таким образом, LIDAR-блок с единственным лучом может быть использован для захвата всего 3D-массива точек расстояния, хоть и с одной точкой за раз. В связанном примере призма применяется, чтобы "делить" лазерный импульс на множество слоев, каждый имеет слегка различный вертикальный угол. Это имитирует эффект кивания, описанный выше, но без приведения в действие самого датчика.
[0006] Во всех вышеописанных примерах траектория света единственного сочетания лазерного излучателя/детектора так или иначе изменяется, чтобы добиваться более широкого поля обзора по сравнению с единственным датчиком.
Число пикселов, которое такие устройства могут формировать в единицу времени, по своей природе является ограниченным вследствие ограничений на скорость повтора импульса единственного лазера. Любое изменение траектории луча, посредством ли зеркала, призмы, либо приведения в действие устройства, которое добивается большей площади охвата, обходится ценой пониженной плотности облака точек.
[0007] Как отмечено выше, системы с 3D-облаком точек существуют в нескольких конфигурациях. Однако, во многих прикладных задачах необходимо видеть в широком поле обзора. Например, при применении автономного транспортного средства, вертикальное поле обзора должно простираться вниз настолько близко, насколько возможно, чтобы видеть землю перед транспортным средством. Кроме того, вертикальное поле обзора должно простираться выше линии горизонта, в случае, когда автомобиль въезжает на спуск на дороге. Кроме того, необходимо иметь минимальную задержку между действиями, происходящими в реальном мире, и формированием изображения этих действий. В некоторых примерах является желательным обеспечивать полное обновление изображения, по меньшей мере, пять раз в секунду. Чтобы удовлетворять эти требования, была разработана 3D LIDAR-система, которая включает в себя массив из множества лазерных излучателей и детекторов. Эта система описывается в патенте США № 7,969,558, выданном 28 июня 2011 года, сущность которого включена в данный документ по ссылке в своей полноте.
[0008] Во многих прикладных задачах излучается последовательность импульсов. Направление каждого импульса последовательно изменяется в быстрой последовательности. В этих примерах измерение расстояния, ассоциированное с каждым отдельным импульсом, может считаться пикселом, а совокупность пикселов, излучаемых и захватываемых в быстрой последовательности (т.е., "облако точек"), может быть воспроизведено как изображение или проанализировано по другим причинам (например, обнаружение препятствий). В некоторых примерах программное обеспечение просмотра применяется для воспроизведения результирующих облаков точек в качестве изображений, которые выглядят трехмерными для пользователя. Различные схемы могут быть использованы для изображения измерений расстояния в качестве 3D-изображений, которые выглядят так, как если бы они были захвачены камерой живого действия.
[0009] Некоторые существующие LIDAR-системы применяют источник облучения и детектор, которые не объединены вместе на общей подложке (например, электрической монтажной плате). Кроме того, траектория пучка облучения и траектория собираемого пучка являются разделенными в LIDAR-устройстве. Это ведет к сложности опто-механической конструкции и трудности юстировки.
[00010] Кроме того, механические устройства, применяемые для сканирования пучков лучей облучения в различных направлениях, могут быть чувствительными к механическим вибрациям, инерционным силам и общим окружающим условиям. Без правильной конструкции эти механические устройства могут деградировать, приводя к потере производительности или отказу.
[00011] Чтобы измерять 3D-окружение с высоким разрешением и высокой пропускной способностью, измерительные импульсы должны быть очень короткими. Текущие системы страдают от низкого разрешения, поскольку они ограничены в своей способности формировать импульсы короткой продолжительности.
[00012] Насыщение детектора ограничивает способность измерения, поскольку целевой коэффициент отражения и близость значительно изменяются в реалистичных рабочих окружениях. Кроме того, потребление мощности может вызывать перегрев LIDAR-системы. Световые устройства, цели, схемы и температуры изменяются в фактических системах. Непостоянство всех этих элементов ограничивает рабочие характеристики системы без правильной калибровки фотонного вывода каждого LIDAR-устройства.
[00013] Улучшения в электронике возбуждения облучения и электронике приемника LIDAR-систем являются желательными для улучшения разрешения формирования изображений и дальности действия.
Сущность изобретения
[00014] Способы и системы для выполнения трехмерных LIDAR-измерений с помощью измерительной LIDAR-системы, применяющей интегральную схему (IC) многоканального, основанного на нитриде галлия (GaN) формирователя облучения, описываются в данном документе. IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения включает в себя полевые транзисторы (FET), которые обеспечивают более высокую плотность тока по сравнению с традиционными кремниевыми устройствами с технологией комплементарного металло-оксидного полупроводника (CMOS). В результате, основанный на нитриде галлия (GaN) формирователь облучения является приспособленным для доставки относительно больших токов каждому источнику облучения со значительно меньшей потерей мощности.
[00015] В одном аспекте формирователь облучения измерительного LIDAR-устройства является многоканальной IC на основе GaN, которая выборочно соединяет каждый источник облучения, ассоциированный с каждым измерительным каналом, с источником электрической мощности, чтобы формировать измерительный импульс облучающего света. Реакция каждого измерительного канала управляется посредством сигнала запуска импульса и ряда управляющих сигналов, принимаемых на IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения.
[00016] В другом аспекте, каждый сигнал запуска импульса, ассоциированный с каждым независимым измерительным каналом, принимается на отдельном узле IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения. Таким образом, каждый измерительный канал реагирует на сигнал запуска, который является уникальным для каждого измерительного канала.
[00017] В другом аспекте, каждый из управляющих сигналов принимается на отдельном узле множества каналов, и каждый из управляющих сигналов сообщается всем измерительным каналам IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения. Таким образом, каждый измерительный канал реагирует на управляющие сигналы, которые совместно используются между всеми измерительными каналами IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения.
[00018] В другом аспекте IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения включает в себя модуль регулирования мощности. Модуль регулирования мощности лишь подает отрегулированное напряжение к различным элементам каждого измерительного канала, когда какой-либо сигнал запуска импульса, принимаемый посредством IC формирователя облучения, находится в состоянии, которое запускает вспышку импульса облучения. Таким образом, мощность не подается к множеству элементов схемы в течение периодов времени, когда IC формирователя облучения не требуется начинать испускание импульса.
[00019] Приведенное выше является сущностью изобретения и, таким образом, содержит, по необходимости, упрощения, обобщения и пропуски подробностей; следовательно, специалисты в данной области техники поймут, что сущность изобретения является лишь иллюстративной, а не ограничивающей каким-либо образом. Другие аспекты, признаки изобретения и преимущества устройств и/или процессов, описанных в данном документе, станут понятными в неограничивающем подробном описании, изложенном в данном документе.
Краткое описание чертежей
[00020] Фиг. 1 - это упрощенная схема, иллюстрирующая один вариант осуществления измерительной LIDAR-системы, включающей в себя многоканальный, основанный на нитриде галлия (GaN) формирователь облучения, по меньшей мере, в одном новом аспекте.
[00021] Фиг. 2 изображает иллюстрацию временной диаграммы, ассоциированной с испусканием измерительного импульса и захватом возвращающегося измерительного импульса.
[00022] Фиг. 3 изображает упрощенную схему, иллюстрирующую IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения в одном варианте осуществления.
[00023] Фиг. 4 изображает упрощенную схему, иллюстрирующую один вариант осуществления модуля регулирования мощности IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00024] Фиг. 5 изображает упрощенную схему, иллюстрирующую один вариант осуществления модуля управления мощностью IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00025] Фиг. 6 изображает упрощенную иллюстрацию изменений в различных операционных сигналах модуля управления мощностью, изображенного на фиг. 5.
[00026] Фиг. 7 изображает упрощенную схему, иллюстрирующую один вариант осуществления генератора сигнала инициирования импульса для IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00027] Фиг. 8 изображает упрощенную схему, иллюстрирующую один вариант осуществления генератора сигнала завершения импульса для IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00028] Фиг. 9 изображает упрощенную схему, иллюстрирующую один вариант осуществления генератора управляющего сигнала для IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00029] Фиг. 10 изображает упрощенную схему, иллюстрирующую один вариант осуществления модуля формирователя мощности для IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00030] Фиг. 11 изображает упрощенную схему, иллюстрирующую другой вариант осуществления модуля формирователя мощности для IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00031] Фиг. 12 изображает упрощенную иллюстрацию изменений в различных операционных сигналах IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, изображенной на фиг. 3.
[00032] Фиг. 13 - это схема, иллюстрирующая вариант осуществления 3D LIDAR-системы 100 в одном примерном рабочем сценарии.
[00033] Фиг. 14 - это схема, иллюстрирующая другой вариант осуществления 3D LIDAR-системы 10 в одном примерном рабочем сценарии.
[00034] Фиг. 15 изображает схему, иллюстрирующую покомпонентный вид 3D LIDAR-системы 100 в одном примерном варианте осуществления.
[00035] Фиг. 16 изображает вид оптических элементов 116 более подробно.
[00036] Фиг. 17 изображает вид в частичном разрезе оптики 116, чтобы иллюстрировать придание формы каждому пучку собираемого света 118.
Подробное описание изобретения
[00037] Ссылка теперь будет выполнена в деталях на примеры уровня техники и некоторые варианты осуществления изобретения, примеры которых иллюстрируются на сопровождающих чертежах.
[00038] Фиг. 1 изображает двухканальную измерительную LIDAR-систему 120 в одном варианте осуществления. Измерительная LIDAR-система 120 включает в себя главный контроллер 190 и интегральную схему (IC) 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения. Кроме того, каждый канал измерительной LIDAR-системы 120 включает в себя IC приемника возвратного сигнала, фотодетектор и источник облучения. Как изображено на фиг. 1, измерительный LIDAR-канал A включает в себя IC 150A приемника возвратного сигнала, фотодетектор 170A и источник 160A облучения. Аналогично, измерительный LIDAR-канал B включает в себя IC 150B приемника возвратного сигнала, фотодетектор 170B и источник 160B облучения. В некоторых вариантах осуществления IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения, источники 160A-B облучения, фотодетекторы 170A-B и IC 150A-B приемников возвратного сигнала устанавливаются, либо непосредственно, либо опосредованно, на общую подложку (например, печатную схемную плату), которая обеспечивает механическую поддержку и электрическую связанность между элементами.
[00039] Кроме того, измерительная LIDAR-система 120 включает в себя один или более источников напряжения, которые предоставляют напряжение различным электронным элементам и электрическую мощность устройствам 160A-B облучения. Как изображено на фиг. 1, измерительная LIDAR-система 120 включает в себя источник 132 низкого напряжения сигнала, сконфигурированный, чтобы прикладывать относительно низкое напряжение между узлами VDDLV 125 и VSS 124. В некоторых вариантах осуществления источник низкого напряжения сигнала равен приблизительно 5 В. Это напряжение выбирается, чтобы гарантировать, что напряжение, прикладываемое на затворах одного или более транзисторов IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения, не превышает пороговое значение повреждения. Кроме того, измерительная LIDAR-система 120 включает в себя источник 133 среднего напряжения сигнала, сконфигурированный, чтобы прикладывать напряжение между узлами VDDMV 127 и VSS 126, которое выше напряжения, прикладываемого источником низкого напряжения сигнала. В некоторых вариантах осуществления напряжение, прикладываемое источником среднего напряжения сигнала, приблизительно равно 12 В. Это напряжение выбирается, чтобы гарантировать быстрые переключающие переходы одного или более транзисторов IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения. Кроме того, измерительная LIDAR-система 120 включает в себя источник 131 питающего напряжения, сконфигурированный, чтобы прикладывать напряжение между узлами VDDHV 122 и VSS 121, которое выше напряжения, прикладываемого источником среднего напряжения. В некоторых вариантах осуществления напряжение, прикладываемое источником питающего напряжения, приблизительно равно 15-20 В. Источник питающего напряжения конфигурируется, чтобы прикладывать высокий ток 123A и 123B (например, 100 А или более) к источникам 160A и 160B облучения, соответственно, который вынуждает источники 160A и 160B облучения, каждый, испускать импульс света для измерения.
[00040] Хотя предпочтительные выходные напряжения были описаны в данном документе, в целом, источник низкого напряжения сигнала, источник среднего напряжения сигнала и источник питающего напряжения могут быть сконфигурированы, чтобы подавать любые подходящие напряжения. В целом, любой из источников мощности, описанных в данном документе, может быть установлен на отдельную подложку и электрически присоединен к различным электронным компонентам любым подходящим образом. Хотя источники 131, 132 и 133 мощности описываются как источники напряжения со ссылкой на фиг. 1, в целом, любой источник электрической мощности, описанный в данном документе, может быть сконфигурирован, чтобы подавать электрическую мощность, указанную как напряжение или ток. Следовательно, любой источник электрической мощности, описанный в данном документе как источник напряжения или источник тока, может рассматриваться в качестве эквивалентного источника тока или источника напряжения, соответственно.
[00041] Каждый источник 160A-B облучения испускает измеряющий импульс облучающего света 162A-B в ответ на соответствующий импульс электрического тока 123A-B. Каждый пучок облучающего света 162A-B фокусируется и проецируется на местоположение в окружающей обстановке посредством одного или более оптических элементов LIDAR-системы.
[00042] В некоторых вариантах осуществления каждый источник 160A-B облучения основывается на лазере (например, лазерном диоде). В некоторых вариантах осуществления каждый источник облучения основывается на одном или более светоизлучающих диодах. В целом, любой подходящий импульсный источник облучения может рассматриваться.
[00043] Как изображено на фиг. 1, облучающий свет 162A-B, испускаемый из каждого канала измерительной LIDAR-системы 120, и соответствующий возвратный свет 171A-B для измерения, направленный к измерительной LIDAR-системе 120, совместно используют общий оптический путь. Каждый канал измерительной LIDAR-системы 120 включает в себя фотодетектор 170A-B. Как изображено на фиг. 1, отформованная поверх линза 172A-B устанавливается поверх каждого фотодетектора 170A-B, соответственно. Каждая отформованная поверх линза 172A-B включает в себя коническую полость, которая соответствует конусу приема луча возвратного света 171A-B, соответственно. Возвратный свет 171A-B отражается от зеркал 161A-B на соответствующие фотодетекторы 170A-B, соответственно. Как изображено на фиг. 1, каждый источник 160A-B облучения находится за пределами поля обзора каждого фотодетектора. Осветительный свет 162A-B от источников 160A-B облучения вводится в конус приема соответствующего детектора через отверстие в зеркалах 161A-B, соответственно.
[00044] Как изображено на фиг. 1, возвратный свет 171A-B, отраженный от окружающей обстановки, обнаруживается посредством фотодетекторов 170A-B, соответственно. В некоторых вариантах осуществления каждый фотодетектор является лавинным фотодиодом. Каждый фотодетектор формирует выходной сигнал 173A-B, который передается соответствующим IC 150A-B приемников возвратного сигнала. Каждая IC 150A-B приемника включает в себя схему синхронизации и преобразователь времени в цифровой код, который рассчитывает время пролета каждого измерительного импульса от каждого источника 160A-B облучения, до отражающих объектов в трехмерном окружении, и обратно к каждому соответствующему фотодетектору 170A-B. Сигналы 152A-B, указывающие расчетные времена пролета, передаются главному контроллеру 190 для дальнейшей обработки и передачи пользователю измерительной LIDAR-системы 120. Кроме того, каждая IC 150A-B приемника возвратного сигнала конфигурируется, чтобы оцифровывать сегменты каждого соответствующего возвратного сигнала 173A-B, которые включают в себя пиковые значения (т.е., возвратные импульсы), и передавать сигналы 153A-B, указывающие оцифрованные сегменты, главному контроллеру 190. В некоторых вариантах осуществления главный контроллер 190 обрабатывает эти сегменты сигнала, чтобы идентифицировать свойства обнаруженных объектов.
[00045] Главный контроллер190 конфигурируется, чтобы формировать импульсные командные сигналы 191A-B, передаваемые IC 150A-B приемников, соответственно. В целом, измерительная LIDAR-система 120 включает в себя любое число измерительных LIDAR-каналов. В этих вариантах осуществления главный контроллер 190 передает импульсный командный сигнал каждому различному измерительному LIDAR-каналу. Таким образом, главный контроллер 190 координирует распределение по времени LIDAR-измерений, выполняемых посредством любого числа измерительных LIDAR-каналов.
[00046] Каждый импульсный командный сигнал является цифровым сигналом, формируемым посредством главного контроллера 190. Таким образом, синхронизация каждого импульсного командного сигнала определяется посредством генератора синхроимпульсов, ассоциированного с главным контроллером 190. В некоторых вариантах осуществления каждый импульсный командный сигнал 191A-B непосредственно используется для начала формирования импульса посредством IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения и получения данных посредством каждой соответствующей IC 150A-B приемника. Однако, IC 140 формирователя облучения и каждая IC 150A-B приемника не используют совместно тот же генератор синхроимпульсов, что и главный контроллер 190. По этой причине, точный расчет времени пролета становится гораздо более трудоемким в вычислительном плане, когда импульсный командный сигнал непосредственно используется для начала формирования импульса и получения данных.
[00047] В одном аспекте, каждая IC 150A-B приемника принимает импульсный командный сигнал 191A-B и формирует соответствующие сигналы 151A и 151B запуска импульсов в ответ на импульсные командные сигналы 191A-B, соответственно. Каждый сигнал 151A-B запуска импульса передается в IC 140 формирователя облучения и непосредственно запускает IC 140 формирователя облучения, чтобы электрически соединять каждый источник 160A-B облучения с источником 131 мощности и формировать соответствующий импульс облучающего света 162A-B. Кроме того, каждый сигнал 151A-B запуска импульса непосредственно инициирует получение данных возвратных сигналов 173A-B и ассоциированные вычисления времени пролета. Таким образом, сигналы 151A-B запуска импульса, формируемые на основе внутреннего генератора синхроимпульсов IC 150A-B приемников, соответственно, применяются для инициирования формирования импульса и получения данных возвратного импульса для отдельного измерительного LIDAR-канала. Это обеспечивает точную синхронизацию формирования импульса и получения возвратного импульса, что предоставляет возможность точных вычислений времени пролета посредством преобразования времени в цифровой код.
[00048] Фиг. 2 изображает иллюстрацию временной диаграммы, ассоциированной с испусканием измерительного импульса из канала A измерительной LIDAR-системы 120 и захватом возвращающегося измерительного импульса. Как изображено на фиг. 2, измерение инициируется посредством нарастающего фронта сигнала 191A запуска импульса, сформированного посредством IC 150A приемника. Как изображено на фиг. 1 и 2, возвратный сигнал 173A принимается посредством IC 150A приемника. Как описано ранее в данном документе, окно измерения (т.е., период времени, в течение которого собранные данные возвратного сигнала ассоциируются с конкретным измерительным импульсом) инициируется, предоставляя возможность получения данных на нарастающем фронте сигнала 191A запуска импульса. IC 150A приемника управляет продолжительностью окна измерения, Tmeasurement, чтобы соответствовать окну времени, когда возвратный сигнал ожидается в ответ на испускание последовательности измерительных импульсов. В некоторых примерах окно измерения разрешается на нарастающем фронте сигнала 191A запуска импульса и запрещается на время, соответствующее времени пролета света на расстояние, которое приблизительно вдвое больше дальности действия LIDAR-системы. Таким образом, окно измерения является открытым для сбора возвратного света от объектов рядом с LIDAR-системой (т.е., ничтожное время пролета) до объектов, которые находятся на максимальной дальности действия LIDAR-системы. Таким образом, весь другой свет, который не может, вероятно, способствовать полезному возвратному сигналу, отбрасывается.
[00049] Как изображено на фиг. 2, возвратный сигнал 173A включает в себя три возвратных измерительных импульса (например, MP1, MP2 и MP3), которые соответствуют испущенному измерительному импульсу. В целом, обнаружение сигнала выполняется по всем обнаруженным измерительным импульсам. Дополнительный анализ сигнала может быть выполнен, чтобы идентифицировать ближайший полезный сигнал P1 (т.е., первый полезный экземпляр возвратного измерительного импульса), наиболее сильный сигнал и самый дальний полезный сигнал P3 (т.е., последний полезный экземпляр возвратного измерительного импульса в окне измерения). Любой из этих экземпляров может быть сообщен как потенциально действительные измерения расстояния посредством LIDAR-системы.
[00050] Внутренние задержки системы, ассоциированные с испусканием света из LIDAR-системы (например, задержки передачи сигнала и время ожидания, ассоциированное с переключающими элементами, элементами накопления энергии и устройством излучения импульсного света), и задержки, ассоциированные со сбором света и формированием сигналов, указывающих собранный свет (например, время ожидания усилителя, задержка аналого-цифрового преобразования и т.д.), способствуют погрешностям в расчете времени пролета измерительного импульса света. Таким образом, измерение времени пролета на основе прошедшего времени между нарастающим фронтом сигнала 191A запуска импульса и каждым возвратным импульсом (т.е., MP1, MP2 и MP3) привносит нежелательную погрешность измерения. В некоторых вариантах осуществления откалиброванное, предварительно определенное время задержки используется для компенсации электронных задержек, чтобы получать скорректированный расчет фактического оптического времени пролета. Однако, точность статической корректировки для динамически изменяющихся электронных задержек является ограниченной. Хотя частые повторные калибровки могут быть применены, это обходится ценой вычислительной сложности и может мешать времени работоспособности системы.
[00051] В другом аспекте каждая IC 150A-B приемника измеряет время пролета на основе времени, прошедшего между обнаружением обнаруженного импульса (например, MP1) вследствие внутренних перекрестных помех между каждым источником 160A-B облучения и соответствующим фотодатчиком 170A-B и полезным возвратным импульсом (например, MP2 и MP3). Таким образом, систематические задержки устраняются из расчета времени пролета. Импульс MP1 формируется внутренней перекрестной помехой фактически без расстояния для распространения света. Таким образом, задержка во времени от нарастающего фронта сигнала запуска импульса и отдельный случай обнаружения импульса MP1 захватывает все систематические задержки, ассоциированные с облучением и обнаружением сигнала. Посредством измерения времени пролета полезных возвратных импульсов (например, возвратных импульсов MP2 и MP3) со ссылкой на обнаруженный импульс MP1, все систематические задержки, ассоциированные с облучением и обнаружением сигнала вследствие внутренней перекрестной помехи, устраняются. Как изображено на фиг. 2, IC 150A приемника оценивает время пролета, TOF1, ассоциированное с возвратным импульсом MP2, и время пролета, TOF2, ассоциированное с возвратным импульсом MP3, со ссылкой на возвратный импульс MP1.
[00052] В некоторых вариантах осуществления анализы сигнала выполняются посредством IC 150A-B приемников полностью. В этих вариантах осуществления передаваемые сигналы 152A-B включают в себя указание времени пролета, определенное посредством IC 150A-B приемника, соответственно. В некоторых вариантах осуществления сигналы 153A-B включают в себя оцифрованные сегменты возвратных сигналов 173A-B, сформированных посредством IC 150A-B приемников, соответственно. Эти необработанные сегменты измерительного сигнала обрабатываются дополнительно посредством одного или более процессоров, расположенных на плате 3D LIDAR-системы, или внешних по отношению к 3D LIDAR-системе, чтобы получать другую оценку расстояния, оценку одного или более физических свойств обнаруженного объекта или их сочетание.
[00053] В одном аспекте измерительная LIDAR-система включает в себя IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, которая выборочно соединяет источник облучения, соответствующий каждому измерительному каналу, с источником электрической мощности, чтобы формировать измерительный импульс облучающего света в ответ на сигнал запуска импульса. Многоканальный, основанный на нитриде галлия (GaN) формирователь облучения включает в себя полевые транзисторы (FET), которые обеспечивают более высокую плотность тока по сравнению с традиционными кремниевыми устройствами с технологией комплементарного металло-оксидного полупроводника (CMOS). В результате, основанный на нитриде галлия (GaN) формирователь облучения является приспособленным для подачи относительно больших токов к источнику облучения со значительно меньшей потерей мощности по сравнению с кремниевым формирователем.
[00054] Как изображено на фиг. 1, IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения соединяется с узлом 121 напряжения источника 131 напряжения питания и узлами источников 160A-B облучения, каждый соответствует различному измерительному LIDAR-каналу. Другой узел каждого источника 160A-B облучения соединяется с узлом 122 напряжения источника 131 напряжения питания. В ответ на каждый сигнал 151A-B запуска импульса один или более полевых транзисторов (FET) IC 140 формирователя облучения становится практически проводящим и фактически соединяет каждый соответствующий источник 160A-B облучения с узлом 121. Это индуцирует прохождения 123A-B высоких токов через источники 160A-B облучения, соответственно, которые стимулируют испускание измерительных импульсов облучающего света 162A-B.
[00055] Фиг. 3 изображает IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения в одном варианте осуществления. В варианте осуществления, изображенном на фиг. 3, IC 140 формирователя облучения включает в себя два независимо управляемых канала формирователя облучения, формирователи 220A и 220B. Однако, в целом, IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, как изображено в данном документе, может включать в себя любое число независимо управляемых каналов формирователя облучения.
[00056] В одном аспекте множество входных сигналов, предоставляемых в IC 140 формирователя облучения, совместно используются обоими формирователями 220A и 220B. Это уменьшает размер IC 140 формирователя облучения, минимизируя микросхему и площадь трассировки, которая потребуется для размещения большего числа отдельных управляющих сигналов. В варианте осуществления, изображенном на фиг. 3, сигнал 192 широтно-импульсного регулирования, сигнал 194 выбора и сигнал 193 регулирования амплитуды, все совместно используются формирователями 220A и 220B (т.е., каждый из этих сигналов принимается на микросхеме в узле и распределяется к различным элементам формирователей 220A и 220B на микросхеме).
[00057] В варианте осуществления, изображенном на фиг. 3, сигналы 151A и 151B запуска импульса, предоставляемые формирователям 220A и 220B, являются лишь сигналами, принимаемыми в IC 140 формирователя облучения, которые индивидуально предоставляются формирователям 220A и 220B, соответственно, и, таким образом, не используются совместно формирователями 220A и 220B.
[00058] В некоторых примерах главный контроллер 190 сообщает сигналы запуска импульса каждому измерительному каналу измерительной LIDAR-системы 100, так что только один канал измерительной LIDAR-системы вспыхивает в заданный момент времени. В некоторых из этих примеров главный контроллер 190 обновляет совместно используемые управляющие сигналы, подаваемые ко всем измерительным каналам (например, сигнал 192 широтно-импульсного регулирования, сигнал 194 выбора и сигнал 193 регулирования амплитуды), до желаемых значений для каждого случая вспышки каждого измерительного канала. Таким образом, главный контроллер 190 независимо управляет параметрами испускания импульсов каждого измерительного LIDAR-канала с помощью управляющих сигналов, совместно используемых всеми измерительными LIDAR-каналами.
[00059] В некоторых других примерах главный контроллер 190 передает сигналы запуска импульса подмножеству измерительных каналов измерительной LIDAR-системы 100, так что только подмножество измерительных каналов вспыхивают в заданный момент времени. В некоторых из этих примеров главный контроллер 190 обновляет совместно используемые управляющие сигналы, подаваемые ко всем измерительным каналам (например, сигнал 192 широтно-импульсного регулирования, сигнал 194 выбора и сигнал 193 регулирования амплитуды), до желаемых значений для каждого случая вспышки каждого подмножества измерительных каналов. Таким образом, главный контроллер 190 независимо управляет параметрами испускания импульсов каждого подмножества измерительных LIDAR-каналов с помощью управляющих сигналов, совместно используемых всеми измерительными LIDAR-каналами.
[00060] В некоторых других вариантах осуществления сигнал 192 широтно-импульсного регулирования, сигнал 194 выбора и сигнал 193 регулирования амплитуды передаются в IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения от IC приемника возвратного сигнала IC 140 формирователя облучения вместо главного контроллера 190.
[00061] В другом аспекте, IC формирователя облучения включает в себя модуль регулирования мощности, который подает отрегулированное напряжение к различным элементам каждого измерительного канала, когда какой-либо сигнал запуска импульса, принятый посредством IC формирователя облучения, находится в состоянии, которое инициирует вспышку импульса облучения. Таким образом, мощность не подается к множеству элементов схемы в течение периодов времени, когда IC 140 формирователя облучения не требуется инициировать испускание импульса. Как изображено на фиг. 3, IC 140 формирователя облучения включает в себя модуль 260 регулирования мощности, который подает отрегулированное напряжение 261 к различным элементам формирователей 220A и 220B, когда сигнал 151A запуска импульса, сигнал 151B запуска импульса, или оба, находятся в состоянии (например, состоянии высокого уровня или состоянии низкого уровня), которое инициирует вспышку импульса облучения. В варианте осуществления, изображенном на фиг. 3, отрегулированное напряжение 261 подается к формирователям 290A-B мощности, генераторам 280A-B управляющих сигналов, генераторам 230A-B сигнала завершения импульса и модулям 210A-B управления мощностью, только когда какой-либо из двух, или оба, сигналов 151A-B запуска импульса находятся в состоянии, которое инициирует вспышку импульса облучения.
[00062] Как изображено на фиг. 3, каждый формирователь облучения включает в себя генератор сигнала завершения импульса, генератор сигнала инициирования импульса, модуль управления мощностью, генератор управляющего сигнала и формирователь мощности. Например, формирователь 220A облучения включает в себя генератор 250A сигнала инициирования импульса, который формирует сигнал 251A инициирования импульса на основе сигнала 151A запуска импульса. Сигнал 251A инициирования импульса передается генератору 230A сигнала завершения импульса и генератору 280A управляющего сигнала. Генератор 230A сигнала завершения импульса формирует сигнал 231A завершения импульса на основе сигнала 192 широтно-импульсного регулирования и сигнала 251A инициирования импульса. Модуль 210A управления мощностью формирует сигнал 211A регулирования амплитуды канала на основе сигнала 151A запуска импульса. Генератор 280 управляющего сигнала формирует сигнал 293A управления затвором, сигнал 281A управления зарядом затвора и сигнал 282A управления разрядом затвора на основе сигнала 251A инициирования импульса, сигнала 231A завершения импульса и сигнала 211A регулирования амплитуды канала. Формирователь 290A мощности включает в себя ряд полевых транзисторов (FET), которые управляют протеканием тока через источник 160A облучения на основе сигнала 293A управления затвором, сигнала 281A управления зарядом затвора и сигнала 282A управления разрядом затвора.
[00063] Аналогично, формирователь 220B облучения включает в себя генератор 250B сигнала инициирования импульса, который формирует сигнал 251B инициирования импульса на основе сигнала 151B запуска импульса. Сигнал 251B инициирования импульса передается генератору 230A сигнала завершения импульса и генератору 280B управляющего сигнала. Генератор 230B сигнала завершения импульса формирует сигнал 231B завершения импульса на основе сигнала 192 широтно-импульсного регулирования и сигнала 251B инициирования импульса. Модуль 210B управления мощностью формирует сигнал 211B регулирования амплитуды канала на основе сигнала 151B запуска импульса. Генератор 280 управляющего сигнала формирует сигнал 293B управления затвором, сигнал 281B управления зарядом затвора и сигнал 282B управления разрядом затвора на основе сигнала 251B инициирования импульса, сигнала 231B завершения импульса и сигнала 211B регулирования амплитуды канала. Формирователь 290B мощности включает в себя ряд полевых транзисторов (FET), которые управляют протеканием тока через источник 160B облучения на основе сигнала 293B управления затвором, сигнала 281B управления зарядом затвора и сигнала 282B управления разрядом затвора.
[00064] В другом аспекте множество FET, применяемых для формирования протекания электрического тока через источник облучения, управляются посредством сигнала 194 выбора. Посредством управления множеством FET, применяемых для формирования протекания электрического тока через источник облучения, величина протекающего тока, сформированного через источник облучения для заданного набора сигналов управления транзистором (например, сигналов 293A-B управления затвором, сигналов 281A-B управления зарядом затвора и сигналов 282A-B управления разрядом затвора) регулируется.
[00065] Фиг. 4 изображает модуль 260 регулирования мощности в одном варианте осуществления. Как изображено на фиг. 3, IC 140 формирователя облучения включает в себя модуль 260 регулирования мощности, который управляет мощностью, доставляемой к фрагменту схемы IC 140 многоканального, основанного на нитриде галлия (GaN) формирователя облучения, чтобы уменьшать потребление мощности. В эксплуатации IC 140 формирователя облучения тратит относительно короткий интервал времени, формируя измерительный импульс, и относительно длительный интервал времени, ожидая пусковой сигнал, чтобы формировать следующий измерительный импульс. Во время этих периодов простоя является желательным уменьшать или устранять подачу мощности к компонентам схемы, которые не должны быть активными в течение всего периода ожидания. Как изображено на фиг. 4, модуль 260 регулирования мощности соединяется между узлами VDDMV и VSS напряжения источника 132 напряжения сигнала, изображенного на фиг. 1. Кроме того, модуль 260 регулирования мощности принимает сигналы 151A и 151B запуска импульса от главного контроллера 190 и, в ответ, формирует отрегулированное напряжение, REG, которое подается к различным фрагментам IC 140 формирователя облучения. Например, REG предоставляется модулю 210 управления мощностью, изображенному на фиг. 5, генератору 230 сигнала завершения импульса, изображенному на фиг. 8, генератору 280 управляющего сигнала, изображенному на фиг. 9, и группам 491A-N главных FET, изображенным на фиг. 11.
[00066] Фиг. 4 изображает модуль 260 регулирования мощности в одном варианте осуществления. Как изображено на фиг. 4, модуль 260 регулирования мощности включает в себя модуль 268 логической схемы И, который принимает сигналы 151A и 151B запуска импульса и формирует входной сигнал для модуля 269 регулятора. Значение входного сигнала определяется по значениям сигналов 151A и 151B запуска импульса. Если один из двух или оба сигнала 151A и 151B запуска импульса находятся в состоянии низкого уровня (т.е., указывающем запуск вспышки для одного или обоих каналов облучения), значение входного сигнала является низким. В этом сценарии FET 264 является "выключенным", а FET 266 подключен к диоду. В результате ненулевое отрегулированное напряжение 261 предоставляется посредством модуля 269 регулятора. Если сигналы 151A и 151B запуска импульса, оба находятся в состоянии высокого уровня (т.е., указывают отсутствие запуска вспышки одного из двух каналов облучения), значение входного сигнала является высоким. В этом сценарии FET 264 является "включенным", а напряжение затвора для FET 266 возбуждается до VSS. В результате нулевое отрегулированное напряжение 261 предоставляется посредством модуля 269 регулятора. В этом сценарии электрическая мощность не подается посредством модуля 260 регулирования мощности.
[00067] Как изображено на фиг. 4, логическая схема 268 является активной схемой, соединенной с узлами 124 и 125 напряжения источника 132 низкого напряжения, изображенного на фиг. 1. Кроме того, модуль 269 регулятора соединяется с узлами 126 и 127 напряжения источника 133 среднего напряжения, изображенного на фиг. 1. Как изображено на фиг. 4, VDDMV предоставляется одному узлу резистора 265 и стоку FET 266. Другой узел резистора 265 соединяется со стоком FET 264 и затвором FET 266. VSS предоставляется истоку FET 264, одному узлу конденсатора 263 и одному узлу конденсатора 267. Другой узел конденсатора 263 соединяется с затвором FET 264 и узлом резистора 262. Другой узел резистора 262 соединяется с выходом логической схемы 268. Другой узел конденсатора 267 соединяется с истоком FET 266, где предоставляется выходной сигнал модуля 260 регулирования мощности.
[00068] Резистор 262 и конденсатор 263 создают RC-сеть, которая привносит задержку на затворе FET 264. Это привносит задержку (TD-SLEEP, изображенную на фиг. 12) между нарастающим фронтом TRG1 и временем, когда REG падает до VSS во время спящего режима.
[00069] Фиг. 12 изображает упрощенную иллюстрацию изменения в отрегулированном напряжении, REG, формируемом посредством модуля 260 регулирования мощности в ответ на какой-либо из сигналов запуска импульса, TRG1 и TRG, находящихся в состоянии, которое запускает вспышку импульса облучения. Как изображено на фиг. 12, на нарастающем фронте одного, или обоих, из сигналов запуска импульса, отрегулированное напряжение остается высоким в течение периода времени, TD-SLEEP. Этот интервал времени определяется по значениям резистора 262 и конденсатора 263. После этого периода времени REG падает быстро. На спадающем фронте TRG1 отрегулированное напряжение остается низким в течение периода времени и затем повышается до относительно высокого значения напряжения, так что IC 140 формирователя облучения готова формировать измерительный импульс в ответ на последующий нарастающий фронт TRG1.
[00070] В другом аспекте каждый канал IC формирователя облучения включает в себя модуль управления мощностью, который формирует сигнал регулирования амплитуды канала и передает сигнал соответствующему генератору управляющего сигнала. Когда сигнал запуска импульса, ассоциированный с конкретным измерительным каналом, находится в состоянии, которое запускает вспышку импульса облучения, модуль управления мощностью формирует сигнал регулирования амплитуды канала, имеющий значение сигнала регулирования амплитуды, принятого от главного контроллера. Однако, когда сигнал запуска импульса, ассоциированный с конкретным измерительным каналом, находится в состоянии, которое не запускает вспышку импульса облучения, модуль управления мощностью формирует сигнал регулирования амплитуды канала, имеющий нулевое значение. Таким образом, мощность не подается к элементам схемы соответствующего генератора управляющего сигнала и формирователю мощности в течение периодов времени, когда конкретный измерительный LIDAR-канал не требуется для инициирования испускания импульса.
[00071] Фиг. 5 изображает модуль 210 управления мощностью в одном варианте осуществления. Модуль 210 управления мощностью повторяется в качестве модуля 210A и 210B управления мощностью в IC 140 формирователя облучения, изображенной на фиг. 3. Как изображено на фиг. 5, модуль 210 управления мощностью реализуется как модуль 210A управления мощностью, изображенный на фиг. 3 в пояснительных целях. Модуль 210 управления мощностью включает в себя модуль 220 задержки, который принимает сигнал запуска импульса (например, сигнал 151A запуска импульса) и формирует задержанный сигнал 227 запуска импульса. Модуль 217 экономии мощности принимает задержанный сигнал 227 запуска импульса и формирует сигнал 211A амплитуды импульса канала на основе задержанного сигнала 227 запуска импульса и сигнала 193 регулирования амплитуды импульса, совместно используемого между всеми измерительными каналами IC 140 формирователя облучения.
[00072] Как изображено на фиг. 5, модуль 220 задержки включает в себя резисторы 221 и 222, конденсаторы 224 и 226, и FET 223 и 225. VSS подается к истоку FET 225, истоку FET 223, первому узлу конденсатора 224 и первому узлу конденсатора 226. Сигнал запуска 151A импульса предоставляется затвору FET 225. Сток FET 225 соединяется со вторым узлом конденсатора 224, затвором FET 223 и первым узлом резистора 221. Сток FET 223 соединяется со вторым узлом конденсатора 226 и первым узлом резистора 222. Задержанный сигнал 227 запуска импульса предоставляется стоку FET 223. VDVLV предоставляется на втором узле резисторов 221 и 222. Модуль 217 экономии мощности включает в себя резистор 213 и FET 214, 215 и 216. VSS подается к истоку FET 214 и истоку FET 215. Затвор FET 214 и затвор FET 215 соединяются со стоком FET 223. Таким образом, задержанный сигнал 227 запуска импульса на узле 212 подается к затворам FET 214 и 215. Отрегулированное напряжение 261 предоставляется на первом узле резистора 213. Второй узел резистора 213 соединяется с затвором FET 216. Сигнал 193 регулирования амплитуды предоставляется на стоке FET 216. Исток FET 216 соединяется со стоком FET 215, где сигнал 211A регулирования амплитуды канала присутствует.
[00073] Как изображено на фиг. 6, модуль 220 задержки формирует задержанный сигнал 227 запуска импульса, имеющий время задержки, TDEL, от сигнала 151A запуска импульса. Модуль 217 экономии мощности формирует сигнал 211A регулирования амплитуды канала, имеющий значение амплитуды, AMP, которое совпадает со значением амплитуды сигнала 193 регулирования амплитуды на спадающем фронте задержанного сигнала 227 запуска импульса. Сигнал 211A регулирования амплитуды канала поддерживает значение амплитуды, AMP, до нарастающего фронта задержанного сигнала 227 запуска импульса. В этом случае, сигнал 211A регулирования амплитуды канала падает до нулевого значения. Вследствие временной задержки, TDEL, вспышка импульса облучения из канала A происходит во время, TFIREA, когда значение амплитуды сигнала 211A регулирования амплитуды канала находится в значении амплитуды, AMP, сигнала 193 регулирования амплитуды. Таким образом, значение амплитуды, AMP, сигнала 193 регулирования амплитуды эффективно передается генератору 280 управляющего сигнала в течение периода времени, когда генератор 280 управляющего сигнала формирует управляющие сигналы, которые предписывают испускание импульса облучения из соответствующего измерительного LIDAR-канала. Однако, в другие моменты времени, когда измерительный LIDAR-канал простаивает, сигнал нулевого значения передается генератору 280 управляющего сигнала.
[00074] Фиг. 7 изображает генератор 250 сигнала инициирования импульса в одном варианте осуществления. Генератор 250 сигнала инициирования импульса повторяется в качестве генераторов 250A и 250B сигнала инициирования импульса в IC 140 формирователя облучения, изображенной на фиг. 3. Как изображено на фиг. 7, генератор 250 сигнала инициирования импульса реализуется как генератор 250A сигнала инициирования импульса, изображенный на фиг. 3, в пояснительных целях. Генератор 250 сигнала инициирования импульса формирует сигнал 251A инициирования импульса на основе сигнала 151A запуска импульса. Генератор 250 сигнала инициирования импульса включает в себя FET 252 и резистор 253. Сигнал 151A запуска импульса предоставляется на затворе FET 252. VSS предоставляется истоку FET 252. VDDMV предоставляется первому узлу резистора 253, и второй узел резистора 253 соединяется со стоком FET 252. Сигнал 251A инициирования импульса предоставляется на стоке FET 252.
[00075] Фиг. 12 изображает упрощенную иллюстрацию изменений в сигнале инициирования импульса, INT1, сформированном генератором 250 сигнала инициирования импульса в ответ на сигнал запуска импульса, TRG1. Как изображено на фиг. 12, на нарастающем фронте сигнала запуска импульса, INT1 падает до низкого значения напряжения, VSS, очень быстро. На спадающем фронте TRG1 INT1 линейно повышается до значения VDDMV, так что IC 140 формирователя облучения является готовой формировать спадающий сигнал инициирования импульса в ответ на последующий нарастающий фронт TRG1.
[00076] Фиг. 8 изображает генератор 230 сигнала завершения импульса в одном варианте осуществления. Генератор 230 сигнала завершения импульса повторяется в качестве генераторов 230A и 230B сигнала завершения импульса в IC 140 формирователя облучения, изображенной на фиг. 3. Как изображено на фиг. 8, генератор 230 сигнала завершения импульса реализуется как генератор 230A сигнала завершения импульса, изображенный на фиг. 3, в пояснительных целях. Генератор 230 сигнала завершения импульса конфигурируется, чтобы формировать импульс программируемой продолжительности на основе значения аналогового входного сигнала. Как изображено на фиг. 1, главный контроллер 190 формирует аналоговый сигнал 192 широтно-импульсного регулирования и передает PWC 192 в IC 140 формирователя облучения. В ответ, IC 140 формирователя облучения изменяет продолжительность импульса на основе принятого значения PWC 192. В варианте осуществления, изображенном на фиг. 8, генератор 230 сигнала завершения импульса принимает PWC 192 и INIT1 251A и формирует сигнал завершения импульса, TERM1 231A, имеющий задержку от INIT1 251A, запрограммированную в соответствии со значением PWC 192.
[00077] Как изображено на фиг. 8, генератор 230 сигнала завершения импульса включает в себя резистор 238 и FET 236-237, сконфигурированные в качестве операционного усилителя. Выход операционного усилителя соединяется с затвором FET 243. Операционный усилитель принимает PWC 192 в качестве входного сигнала на затворе FET 236. Кроме того, операционный усилитель принимает входное напряжение 249 на затворе FET 237. Когда входное напряжение 249 превышает значение PWC 192, значение выходного напряжения 248 переключает переходы в низкое значение. Когда значение PWC 192 превышает значение входного напряжения 249, значение выходного напряжения 248 переходит в высокое значение. Входное напряжение 249 является напряжением RC-цепи, сформированной посредством резистора 241 и конденсатора 242. INIT1 251A принимается на затворе FET 240. Когда INIT1 251A переходит в низкое значение (в начале импульса), FET 240 эффективно отсоединяет RC-цепь от VSS. Это предоставляет возможность RC-цепи начинать заряжаться. FET 239 предоставляет ненулевое начальное напряжение для RC-цепи. Когда напряжение RC-цепи растет, в конечном счете, оно превышает значение PWC 192, таким образом, запуская переход выходного узла 248. Поскольку скорость линейного изменения напряжения RC-цепи является постоянной, задержка до перехода выходного напряжения 248 определяется частично по значению PWC 192. Чем больше значение PWC 192, тем длиннее задержка от инициирования импульса перед формированием сигнала завершения, TERM1 231A. Таким образом, значение PWC 192 определяет продолжительность импульса. Генератор 230 сигнала завершения импульса включает в себя резистор 232 и FET 233-235, сконфигурированные в качестве источника тока для структуры операционного усилителя. FET 243 и 244 конфигурируются, чтобы уменьшать значение выходного напряжения 248. Резисторы 245 и 247 и FET 246 конфигурируются, чтобы инвертировать масштабированное значение выходного напряжения 248. Сигнал завершения импульса, TERM1 231A, предоставляется на стоке FET 246.
[00078] Фиг. 12 изображает упрощенную иллюстрацию изменений в сигнале завершения импульса, TERM1 231A, сформированном генератором 230 сигнала завершения импульса в ответ на сигнал инициирования импульса, INIT1 251A и сигнал широтно-импульсного регулирования, PWC 192. Как изображено на фиг. 12, когда INIT1 устанавливается низким, напряжение RC-цепи начинает повышаться. В момент времени, когда напряжение RC-цепи превышает PWC, TERM1 устанавливается высоким, удерживается в течение периода времени и затем снова линейно понижается. Отметим, что период времени, TD-PULSE между инициированием импульса и нарастающим фронтом TERM1 определяет относительную продолжительность измерительного импульса. На спадающем фронте TRG1 TERM1 линейно снижается снова, так что IC 140 формирователя облучения является готовой формировать сигнал завершения импульса для последующего импульса. Как изображено, на фиг. 12, напряжение затвора, GATE1, главного FET 141, или группы FET, также изображается.
[00079] Как изображено на фиг. 3, IC 140 формирователя облучения включает в себя генераторы 230A-B сигнала завершения импульса, которые формируют сигналы завершения импульса, TERM1 и TERM2, на основе соответствующих сигналов инициирования импульса. Вместе сигналы инициирования импульса и сигналы завершения импульса непосредственно определяют синхронизацию каждого импульса, формируемого посредством IC 140 формирователя облучения. В этих вариантах осуществления, вместо необходимости сигналу запуска тока (например, TRG1, TRG2) непосредственно определять синхронизацию импульса, формируемого посредством IC 140 облучения, сигнал запуска импульса применяется для начала формирования сигнала инициирования импульса. Сигнал инициирования импульса, в свою очередь, непосредственно инициирует формирование импульса, а также инициирует формирование сигнала завершения импульса. Сигнал завершения импульса, в свою очередь, непосредственно завершает формирование импульса.
[00080] Фиг. 9 изображает генератор 280 управляющего сигнала в одном варианте осуществления. Генератор 280 управляющего сигнала повторяется как генераторы 280A и 280B управляющего сигнала в IC 140 формирователя облучения, изображенной на фиг. 3. Как изображено на фиг. 9, генератор 280 управляющего сигнала реализуется как генератор 280A управляющего сигнала, изображенный на фиг. 3, в пояснительных целях. Генератор 280 управляющего сигнала формирует сигнал 283A управления затвором, сигнал 281A управления зарядом затвора и сигнал 282A управления разрядом затвора на основе сигнала 251A инициирования импульса, сигнала 231A завершения импульса и сигнала 211A регулирования амплитуды канала. Управляющие сигналы, формируемые генератором 280 управляющего сигнала, непосредственно управляют множеством FET, которые регулируют протекание тока через источник облучения, соединенный с формирователем 140 облучения.
[00081] Генератор 280 управляющего сигнала включает в себя схему 255 регулирования амплитуды импульса, FET 284, 286, 287, 288 и резистор 285.
[00082] В другом аспекте, генератор 230 сигнала завершения импульса конфигурируется, чтобы формировать импульс программируемой амплитуды на основе значения аналогового входного сигнала. Как изображено на фиг. 1, IC 150 приемника формирует аналоговый сигнал регулирования амплитуды, VAMP 153, и передает VAMP в IC 140 формирователя облучения. В ответ, IC 140 формирователя облучения изменяет амплитуду импульса на основе принятого значения VAMP.
[00083] В варианте осуществления 140C для фрагментов IC 140 формирователя облучения, изображенной на фиг. 11, схема 250 регулирования амплитуды импульса принимает VAMP, которое регулирует амплитуду импульса, формируемого источником 160 облучения.
[00084] Когда INIT1 251A устанавливается в низкий уровень (сигнализирующий начало измерительного импульса), FET 286 быстро освобождает затвор FET заряда (например, FET 393 заряда, изображенного на фиг. 10) от VSS посредством сигнала 281A управления зарядом затвора, предоставляя возможность FET заряда быстро заряжаться. Аналогично, FET 287 быстро освобождает затвор главного FET (например, главного FET 391, изображенного на фиг. 10) от VSS, предоставляя возможность главному FET заряжаться посредством сигнала 283A управления затвором.
[00085] Когда TERM1 231A устанавливается в высокий уровень (сигнализирующий конец измерительного импульса), FET 288 закорачивает затвор зарядного FET на VSS. Аналогично, FET разряда (например, FET 394 разряда, изображенный на фиг. 10) закорачивает затвор главного FET на VSS посредством сигнала 282A управления разрядом затвора настолько быстро, насколько возможно, чтобы отключать протекание тока через источник 160 облучения. FET 285 и резистор 285 обеспечивают быстрое включение FET разряда и FET 288.
[00086] Кроме того, схема 255 регулирования амплитуды импульса включает в себя резисторы 256 и 259, конденсатор 257 и FET 258. Сигнал регулирования амплитуды канала, AMP1 211A, принимается на первом узле резистора 256. Второй узел резистора 256 соединяется с затвором FET 258 и с первым узлом конденсатора 257. Сток FET 258 соединяется с источником отрегулированного напряжения, VREG, и принимает отрегулированное напряжение 261. Исток FET 258 соединяется с первым узлом резистора 259. Второй узел резистора 259 соединяется со вторым узлом конденсатора 257, где предоставляется сигнал 281A управления зарядом затвора. Таким образом, схема 255 регулирования амплитуды импульса управляет зарядом на затворе зарядного FET (например, зарядного FET 393, изображенного на фиг. 10).
[00087] Как изображено на фиг. 12, значение AMP1 регулирует скорость линейного изменения для схемы 255 регулирования амплитуды импульса. Когда AMP1 увеличивается, скорость накопления заряда на затворе FET 258 увеличивается. В свою очередь, это увеличивает скорость накопления заряда на затворе зарядного FET через сигнал 281A управления зарядом затвора. Это, в свою очередь, увеличивает скорость накопления заряда на затворе главного FET, который ускоряет скорость линейного изменения результирующего импульса облучения, формируемого источником 160A облучения. Таким образом, AMP1 регулирует пиковую амплитуду импульса облучения для заданной продолжительности импульса.
[00088] Фиг. 10 изображает формирователь 390 мощности в одном варианте осуществления. В некоторых варианта осуществления формирователь 390 мощности воспроизводится как формирователи 290A и 290B мощности в IC 140 формирователя облучения, изображенной на фиг. 3. Как изображено на фиг. 10, формирователь 390 мощности реализуется как формирователь 290A мощности, изображенный на фиг. 3, в пояснительных целях. В изображенном варианте осуществления формирователь 390 мощности включает в себя три FET 391, 393 и 394, объединенные в IC 140 на основе GaN. В примере, изображенном на фиг. 10, главный FET 391 управляет протеканием тока 123A через источник 160A облучения (например, лазерный диод 160A). Сигнал 283A управления затвором вносит вклад в напряжение затвора главного FET 393. Кроме того, зарядный FET 393 и разрядный FET 394 также вносят вклад в напряжение затвора главного FET 391 и ускоряют переходы и минимизируют потери мощности.
[00089] Как изображено на фиг. 10, сток зарядного FET 393 соединяется с узлом 125 напряжения источника 132 низкого напряжения, изображенного на фиг. 1. Исток зарядного FET 393 соединяется со стоком разрядного FET 394 и с затвором главного FET 391. Исток зарядного FET 394 соединяется с узлом 124 напряжения низковольтного источника 132. Кроме того, резистор 392 подключается между затвором главного FET 391 и узлом 124 напряжения низковольтного источника 132. Сигнал 281A управления зарядом затвора предоставляется на затворе зарядного FET 393, а сигнал 282 управления разрядом затвора предоставляется на затворе разрядного FET 394. Таким образом, сигнал 281A управления зарядом затвора, сигнал 282A управления разрядом затвора и сигнал 283A управления затвором определяют заряд на затворе главного FET 391, и, таким образом, проводящее состояние главного FET 391.
[00090] Хотя фиг. 10 изображает вариант осуществления 390, реализованный в качестве формирователя 290A мощности, изображенного на фиг. 3, в целом, вариант осуществления 390 может быть реализован как формирователь мощности любого измерительного LIDAR-канала (например, формирователь 290A, 290B мощности или оба).
[00091] Вариант осуществления 390 модуля 290A формирователя мощности, изображенный на фиг. 10, включает в себя единственный главный FET 391, который определяет протекание тока через источник 160A облучения. В другом аспекте формирователь мощности включает в себя множество различных FET, сконфигурированных, чтобы управлять протеканием тока через источник облучения. Кроме того, число FET, соединенных с каждым источником облучения, является программируемым. Это предоставляет возможность программируемого максимального протекания тока через каждый источник облучения и, таким образом, программируемой максимальной амплитуды импульса облучения.
[00092] Фиг. 11 изображает формирователь 490 мощности в другом варианте осуществления. В некоторых вариантах осуществления формирователь 490 мощности повторяется как формирователи 290A и 290B мощности в IC 140 формирователя облучения, изображенной на фиг. 3. Как изображено на фиг. 11, формирователь 490 мощности реализуется как формирователь 290A мощности, изображенный на фиг. 3, в пояснительных целях. Обозначенные аналогичными номерами элементы описываются со ссылкой на фиг. 10. Как изображено на фиг. 11, N групп из одного или более FET соединяются параллельно с источником 160A облучения, где N - это любое положительное целое число. Сток каждого главного FET каждой FET-группы 491A-491N соединяется с узлом источника 160A облучения. Аналогично, исток каждого главного FET каждой FET-группы 491A-491N соединяется с узлом 121 источника 131 напряжения питания. Затворы каждого главного FET каждой FET-группы 141A-141N выборочно соединяются с истоком FET заряда и стоком FET разряда, как описано со ссылкой на фиг. 10. То, соединяется ли электрически каждый главный FET конкретной FET-группы с истоком FET заряда и стоком FET разряда, определяется по состоянию сигнала выбора, SEL 194, принятого от главного контроллера 190. В примере, изображенном на фиг. 11, SEL является N-битным словом. Каждый бит соответствует конкретной группе главных FET. Если конкретный бит находится в состоянии высокого уровня, каждый главный FET, ассоциированный с соответствующей группой главных FET, соединяется с истоком FET заряда и стоком FET разряда. В этом состоянии сигнал 283A управления затвором, сигнал 281A управления зарядом затвора и сигнал 282A управления разрядом затвора определяют заряд на затворе каждого главного FET соответствующей группы главных FET. Таким образом, состояние каждого бита N-битного слова определяет, какие группы главных FET будут участвовать в формировании импульса источником 160A облучения.
[00093] Главный контроллер 190 определяет, какие FET-группы должны участвовать в следующем измерительном импульсе, формируя и передавая сигнал SEL в IC 140 формирователя облучения. В некоторых примерах определение основывается на возвратном сигнале, принятом от предыдущего измерительного импульса. Например, если принятый возвратный сигнал является насыщенным, главный контроллер 190 формирует и передает сигнал выбора, SEL, формирователю 140 облучения с большим числом битов нулевого значения, чтобы уменьшать число участвующих групп главных FET. Таким образом, число фотонов, испускаемых в следующем импульсе облучения, уменьшается.
[00094] В некоторых вариантах осуществления число FET в каждой группе главных FET является различным. Таким образом, различные сочетания FET-групп могут быть активизированы, чтобы достигать широкого диапазона участвующих FET с единообразным разрешением.
[00095] Хотя фиг. 11 изображает вариант осуществления 490, реализованный в качестве формирователя 290A мощности, изображенного на фиг. 3, в целом, вариант осуществления 490 может быть реализован как формирователь мощности любого измерительного LIDAR-канала (например, формирователь 290A, 290B мощности или оба).
[00096] Фиг. 13-15 изображают 3D LIDAR-системы, которые включают в себя одну или более IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения. В некоторых вариантах осуществления время задержки задается между вспышкой каждого измерительного LIDAR-канала. В некоторых примерах время задержки больше времени пролета измерительного импульса к и от объекта, расположенного на максимальной дальности действия LIDAR-устройства. Таким образом, не существует перекрестной помехи между какими-либо измерительными LIDAR-каналами. В некоторых других примерах измерительный импульс испускается из одного измерительного LIDAR-канала, прежде чем измерительный импульс, испущенный из другого измерительного LIDAR-канала, успевает вернуться к LIDAR-устройству. В этих вариантах осуществления внимание уделяется обеспечению достаточного пространственного разделения между областями окружающей обстановки, исследуемыми посредством каждого пучка лучей, чтобы избегать перекрестной помехи.
[00097] Фиг. 13 - это схема, иллюстрирующая вариант осуществления 3D LIDAR-системы 100 в одном примерном рабочем сценарии. 3D LIDAR-система 100 включает в себя нижний корпус 101 и верхний корпус 102, который включает в себя элемент 103 куполообразной оболочки, сконструированный из материала, который является прозрачным для инфракрасного света (например, света, имеющего длину волны в спектральном диапазоне 700-1700 нанометров). В одном примере элемент 103 куполообразной оболочки является прозрачным для света, имеющего длины волн, концентрирующиеся на 905 нанометрах.
[00098] Как изображено на фиг. 13, множество пучков света 105 испускаются из 3D LIDAR-системы 100 через элемент 103 куполообразной оболочки в угловом диапазоне, α, измеряемом от центральной оси 104. В варианте осуществления, изображенном на фиг. 13, каждый пучок света проецируется на плоскость, определенную осями x и y, во множестве различных местоположений, расположенных с интервалом друг от друга. Например, пучок 106 проецируется на плоскость xy в местоположении 107.
[00099] В варианте осуществления, изображенном на фиг. 13, 3D LIDAR-система 100 конфигурируется, чтобы осуществлять сканирование с помощью каждого из множества пучков света 105 вокруг центральной оси 104. Каждый пучок света, проецируемый на плоскость xy, очерчивает круглый контур с центром около точки пересечения центральной оси 104 и плоскости xy. Например, со временем, пучок 106, спроецированный на плоскость xy, вычерчивает круговую траекторию 108 с центром около центральной оси 104.
[000100] Фиг. 14 - это схема, иллюстрирующая другой вариант осуществления 3D LIDAR-системы 10 в одном примерном рабочем сценарии. 3D LIDAR-система 10 включает в себя нижний корпус 11 и верхний корпус 12, который включает в себя элемент 13 цилиндрической оболочки, сконструированный из материала, который является прозрачным для инфракрасного света (например, света, имеющего длину волны в спектральном диапазоне 700-1700 нанометров). В одном примере элемент 13 цилиндрической оболочки является прозрачным для света, имеющего длины волн, концентрирующиеся на 905 нанометрах.
[000101] Как изображено на фиг. 14, множество пучков света 15 испускаются из 3D LIDAR-системы 10 через элемент 13 цилиндрической оболочки в угловом диапазоне β. В варианте осуществления, изображенном на фиг. 14, иллюстрируется главный луч каждого пучка света. Каждый пучок света проецируется наружу в окружающую обстановку во множестве различных направлений. Например, пучок 16 проецируется на местоположение 17 в окружающей обстановке. В некоторых вариантах осуществления каждый пучок света, испускаемый из системы 10, слегка расходится. В одном примере пучок света, испускаемый из системы 10, облучает пятно размером 20 сантиметров в диаметре на расстоянии 100 метров от системы 10. Таким образом, каждый пучок облучающего света является конусом облучающего света, испускаемого из системы 10.
[000102] В варианте осуществления, изображенном на фиг. 14, 3D LIDAR-система 10 конфигурируется, чтобы осуществлять сканирование с помощью каждого из множества пучков света 15 вокруг центральной оси 14. В целях иллюстрации, пучки света 15 иллюстрируются в одной угловой ориентации относительно невращающейся системы координат 3D LIDAR-системы 10, а пучки света 15' иллюстрируются в другой угловой ориентации относительно невращающейся системы координат. Когда пучки света 15 поворачиваются вокруг центральной оси 14, каждый пучок света, проецируемый в окружающую обстановку (например, каждый конус облучающего света, ассоциированный с каждым пучком), облучает объем окружения, соответствующий конусообразному облучающему пучку, когда он вычерчен вокруг центральной оси 14.
[000103] Фиг. 15 изображает покомпонентный вид 3D LIDAR-системы 100 в одном примерном варианте осуществления. 3D LIDAR-система 100 дополнительно включает в себя механизм 112 испускания/сбора света, который вращается вокруг центральной оси 104. В варианте осуществления, изображенном на фиг. 15, центральная оптическая ось 117 механизма 112 испускания/сбора света наклонена под углом, θ, относительно центральной оси 104. Как изображено на фиг. 15, 3D LIDAR-система 100 включает в себя неподвижную электронную плату 110, установленную в фиксированной позиции относительно нижнего корпуса 101. Вращающаяся электронная плата 111 располагается над неподвижной электронной платой 110 и конфигурируется, чтобы вращаться относительно неподвижной электронной платы 110 с предварительно определенной скоростью вращения (например, более 200 об/мин). Сигналы электрической мощности и электронные сигналы передаются между неподвижной электронной платой 110 и вращающейся электронной платой 111 через один или более трансформаторных, емкостных или оптических элементов, приводя в результате к бесконтактной передаче этих сигналов. Механизм 112 испускания/сбора света неподвижно позиционируется относительно вращающейся электронной платы 111 и, таким образом, вращается вокруг центральной оси 104 с предварительно определенной угловой скоростью, ώ.
[000104] Как изображено на фиг. 15, механизм 112 испускания/сбора света включает в себя массив измерительных LIDAR-устройств 113. В некоторых вариантах осуществления каждое измерительное LIDAR-устройство является многоканальным измерительным LIDAR-устройством, таким как измерительное LIDAR-устройство 120, иллюстрированное на фиг. 1.
[000105] Свет, испускаемый из каждого измерительного LIDAR-устройства, проходит через последовательность оптических элементов 116, которые коллимируют испущенный свет, чтобы формировать пучок облучающего света, проецируемый из 3D LIDAR-системы в окружающую обстановку. Таким образом, массив пучков света 105, каждый испущен из различного измерительного LIDAR-устройства, испускаются из 3D LIDAR-системы 100, как изображено на фиг. 13. В целом, любое число измерительных LIDAR-устройств может быть выполнено с возможностью одновременно испускать любое число пучков света из 3D LIDAR-системы 100. Свет, отраженный от объекта в окружающей обстановке вследствие его облучения конкретным измерительным LIDAR-устройством, собирается посредством оптических элементов 116. Собранный свет проходит сквозь оптические элементы 116, где он фокусируется на обнаруживающем элементе того же, конкретного измерительного LIDAR-устройства. Таким образом, собранный свет, ассоциированный с облучением различных фрагментов окружающей обстановки посредством облучения, формируемого различными измерительными LIDAR-устройствами, отдельно фокусируется на детекторе каждого соответствующего измерительного LIDAR-устройства.
[000106] Фиг. 16 изображает вид оптических элементов 116 более подробно. Как изображено на фиг. 16, оптические элементы 116 включают в себя четыре линзовых элемента 116A-D, выполненных с возможностью фокусировать собранный свет 118 на каждый детектор массива измерительных LIDAR-устройств 113. В варианте осуществления, изображенном на фиг. 16, свет, проходящий через оптику 116, отражается от зеркала 124 и направляется на каждый детектор массива измерительных LIDAR-устройств 113. В некоторых вариантах осуществления один или более оптических элементов 116 конструируется из одного или более материалов, которые поглощают свет за пределами предварительно определенного диапазона длин волн. Предварительно определенный диапазон длин волн включает в себя длины волн света, испускаемого массивом объединенных измерительных LIDAR-устройств 113. В одном примере один или более линзовых элементов конструируются из пластикового материала, который включает в себя окрашивающую добавку, чтобы поглощать свет, имеющий длины волн меньше инфракрасного света, формируемого посредством каждого из массива объединенных измерительных LIDAR-устройств 113. В одном примере красителем является Epolight 7276A, доступный от компании Aako BV (Нидерланды). В целом, любое число различных красителей может быть добавлено в один из пластмассовых оптических элементов оптики 116, чтобы отфильтровывать нежелательные спектры.
[000107] Фиг. 16 изображает вид в частичном разрезе оптики 116, чтобы иллюстрировать придание формы каждому пучку собираемого света 118.
[000108] Таким образом, LIDAR-система, такая как 3D LIDAR-система 10, изображенная на фиг. 14, и система 100, изображенная на фиг. 13, включают в себя множество измерительных LIDAR-устройств, каждое испускает множество импульсных пучков облучающего света из LIDAR-устройства в окружающую обстановку и измеряет возвратный свет, отраженный от объектов в окружающей обстановке.
[000109] В некоторых вариантах осуществления, таких как варианты осуществления, описанные со ссылкой на фиг. 13 и фиг. 14, массив измерительных LIDAR-устройств устанавливается на вращающуюся раму LIDAR-устройства. Эта вращающаяся рама вращается относительно рамы основания LIDAR-устройства. Однако, в целом, массив измерительных LIDAR-устройств может быть подвижным любым подходящим образом (например, карданный подвес, привод наклона/поворота и т.д.) или неподвижным относительно рамы основания LIDAR-устройства.
[000110] В некоторых других вариантах осуществления каждое измерительное LIDAR-устройство включает в себя элемент направления пучка (например, сканирующее зеркало, MEMS-зеркало и т.д.), который сканирует пучки лучей облучения, формируемые измерительным LIDAR-устройством.
[000111] В некоторых других вариантах осуществления два или более измерительных LIDAR-устройств, каждое, испускают пучки облучающего света в направлении устройства сканирующего зеркала (например, MEMS-зеркала), которое отражает пучки в окружающую обстановку в различных направлениях.
[000112] В дополнительном аспекте одно или более измерительных LIDAR-устройств находятся в оптической связи с устройством фазовой модуляции оптического диапазона, которое направляет пучки облучения, формируемые измерительными LIDAR-устройствами, в различных направлениях. Устройство фазовой модуляции оптического диапазона является активным устройством, которое принимает управляющий сигнал, который предписывает устройству фазовой модуляции оптического диапазона изменять состояние и, таким образом, изменять направление света, рассеиваемого из устройства фазовой модуляции оптического диапазона. Таким образом, пучки облучения, формируемые измерительными LIDAR-устройствами, осуществляют сканирование по множеству различных ориентаций и эффективно исследуют измеряемую окружающую 3D-обстановку. Рассеянные пучки, проецируемые на окружающую обстановку, взаимодействуют с объектами в окружающей обстановке. Каждый соответствующий измерительный LIDAR-канал измеряет расстояние между измерительной LIDAR-системой и обнаруженным объектом на основе возвратного света, собираемого от объекта. Устройство фазовой модуляции оптического диапазона размещается на оптическом пути между измерительным LIDAR-устройством и измеряемым объектом в окружающей обстановке. Таким образом, и облучающий свет и соответствующий возвратный свет проходят через устройство фазовой модуляции оптического диапазона.
[000113] Вычислительная система, которая описывается в данном документе, может включать в себя, но не только, систему персонального компьютера, систему универсального компьютера, рабочую станцию, компьютер изображений, параллельный процессор или любое другое устройство, известное на уровне техники. В целом, термин "вычислительная система" может быть широко определен, чтобы охватывать любое устройство, имеющее один или более процессоров, которые исполняют инструкции с запоминающего носителя.
[000114] Программные инструкции, реализующие способы, такие как способы, описанные в данном документе, могут быть переданы через среду передачи, такую как провод, кабель или беспроводная линия передачи. Программные инструкции хранятся на компьютерно-читаемом носителе. Примерные компьютерно-читаемые носители включают в себя постоянное запоминающее устройство, оперативное запоминающее устройство, магнитный или оптический диск или магнитную ленту.
[000115] В одном или более примерных вариантах осуществления описанные функции могут быть реализованы в аппаратных средствах, программном обеспечении, программно-аппаратных средствах или любой их комбинации. Если реализованы в программном обеспечении, функции могут быть сохранены или передаваться как одна или более инструкций или код на компьютерно-читаемом носителе. Компьютерно-читаемые носители включают в себя как компьютерные носители хранения данных, так и среду связи, включающую в себя любую среду, которая обеспечивает перенос компьютерной программы из одного места в другое. Носители хранения данных могут быть любыми доступными носителями, к которым может быть осуществлен доступ посредством компьютера общего или специального назначения. В качестве примера, а не ограничения, такие компьютерно-читаемые носители могут содержать RAM, ROM, EEPROM, CD-ROM или другой накопитель на оптическом диске, накопитель на магнитном диске или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться, чтобы переносить или хранить желаемое средство кодирования программы в форме инструкций или структур данных, и к которому может быть осуществлен доступ посредством компьютера общего или специального назначения или процессора общего или специального назначения. Так же, любое подключение корректно называть машиночитаемым носителем. Например, если программное обеспечение передается с веб-сайта, сервера или другого удаленного источника с помощью коаксиального кабеля, оптоволоконного кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, таких как инфракрасные, радиопередающие и микроволновые среды, то коаксиальный кабель, оптоволоконный кабель, витая пара, DSL или беспроводные технологии, такие как инфракрасные, радиопередающие и микроволновые среды, включены в определение носителя. Диск (англ. - disk) и диск (англ. - disc) при использовании в данном документе включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкий диск и диск Blu-Ray, при этом диски (disk) обычно воспроизводят данные магнитно, тогда как диски (disc) воспроизводят данные оптически с помощью лазеров. Комбинации вышеперечисленного также следует включать в рамки компьютерно-читаемых носителей.
[000116] Хотя некоторые конкретные варианты осуществления описаны выше в инструктирующих целях, сведения, раскрытые в этом патентном документе имеют общую применимость и не ограничиваются конкретными вариантами осуществления, описанными выше. Соответственно, различные модификации, адаптации и сочетания различных признаков описанных вариантов осуществления могут быть применены на практике без отступления от рамок изобретения, которые изложены в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ | 2019 |
|
RU2840846C2 |
| ПРИЕМНИК SPS С РЕГУЛИРУЕМОЙ ЛИНЕЙНОСТЬЮ | 2008 |
|
RU2433529C2 |
| РАДИОЧАСТОТНЫЕ УСИЛИТЕЛИ МОЩНОСТИ | 2007 |
|
RU2434317C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2018 |
|
RU2777565C2 |
| Гетероструктурный полевой транзистор на основе нитрида галлия с улучшенной стабильностью вольт-амперной характеристики к ионизирующим излучениям | 2016 |
|
RU2646529C1 |
| ПОЛЕВЫЕ ДАТЧИКИ | 2018 |
|
RU2740358C1 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО И УСТРОЙСТВО ЖИДКОКРИСТАЛЛИЧЕСКОГО ДИСПЛЕЯ | 2008 |
|
RU2420930C1 |
| МОЩНЫЙ ПЕРЕКЛЮЧАТЕЛЬ СВЧ | 2014 |
|
RU2563533C2 |
| ПОДЛОЖКА ДЛЯ ИССЛЕДОВАНИЙ МЕТОДОМ УСИЛЕННОГО ПОВЕРХНОСТЬЮ КОМБИНАЦИОННОГО РАССЕЯНИЯ | 2011 |
|
RU2574176C2 |
| МОЩНЫЙ ПЕРЕКЛЮЧАТЕЛЬ СВЧ | 2014 |
|
RU2574810C2 |

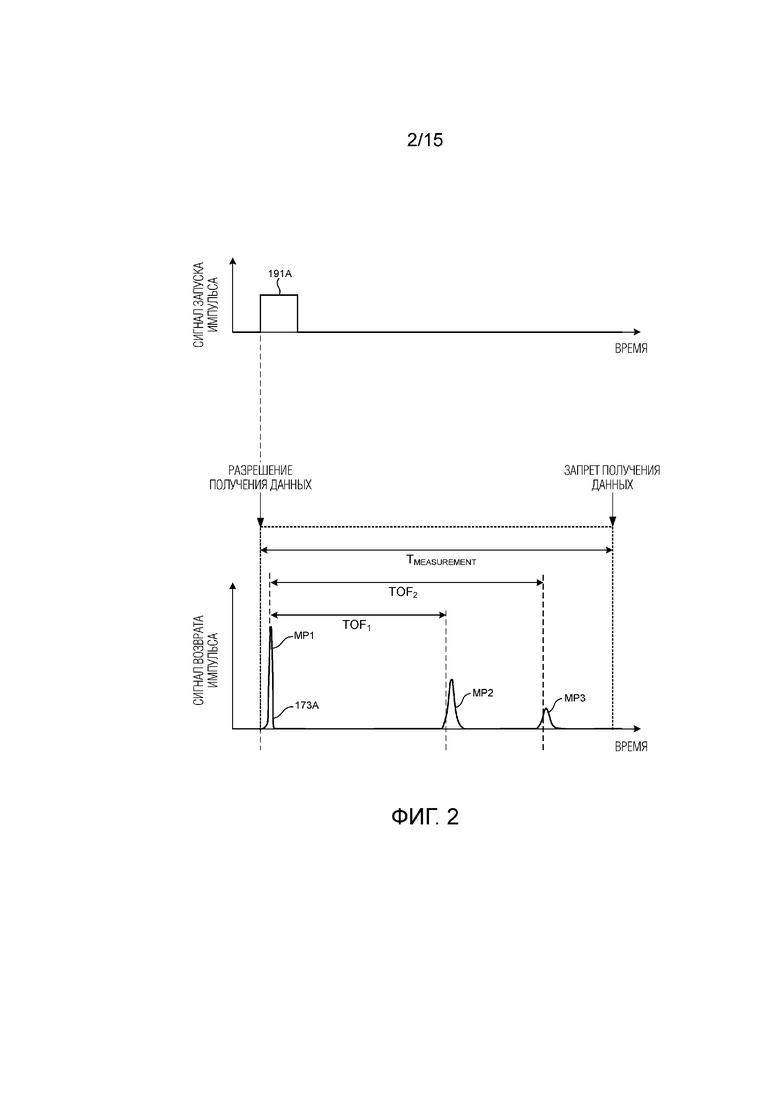
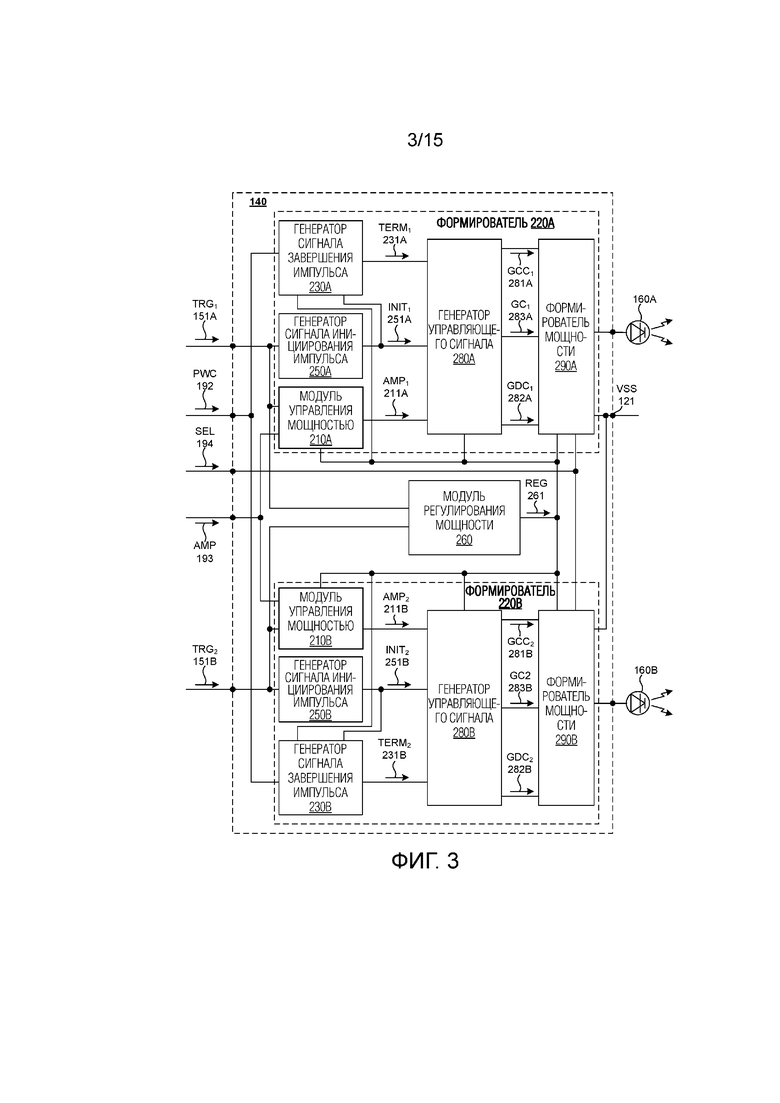
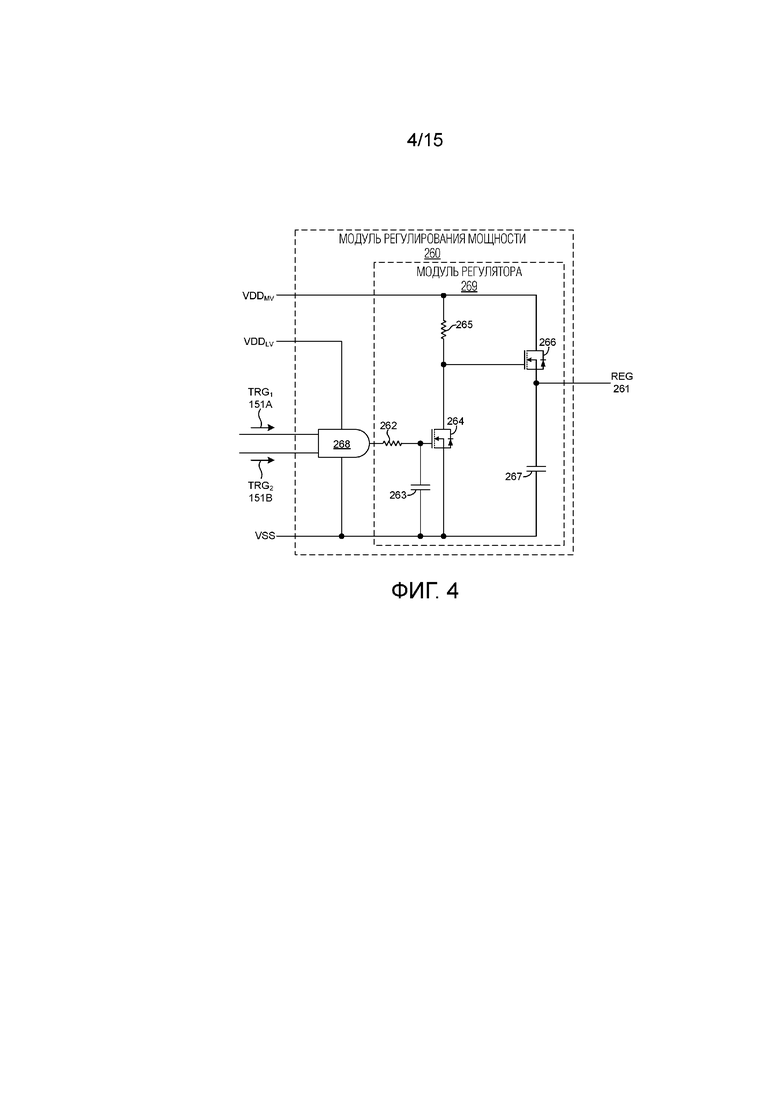
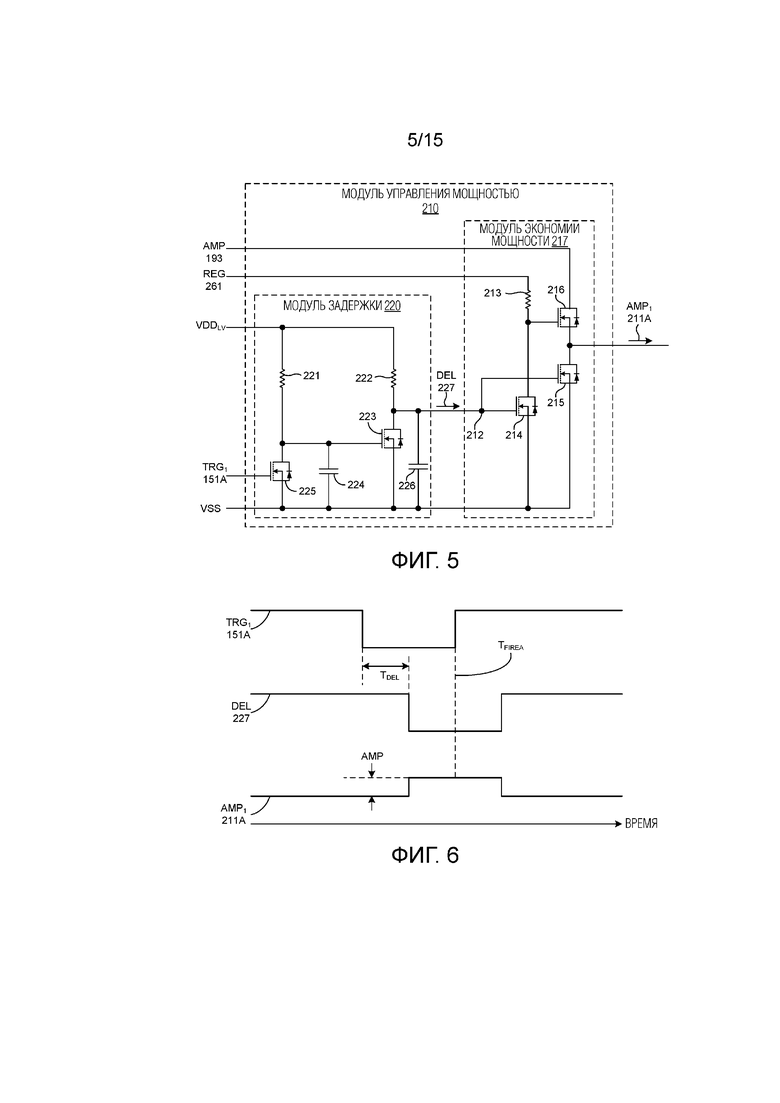
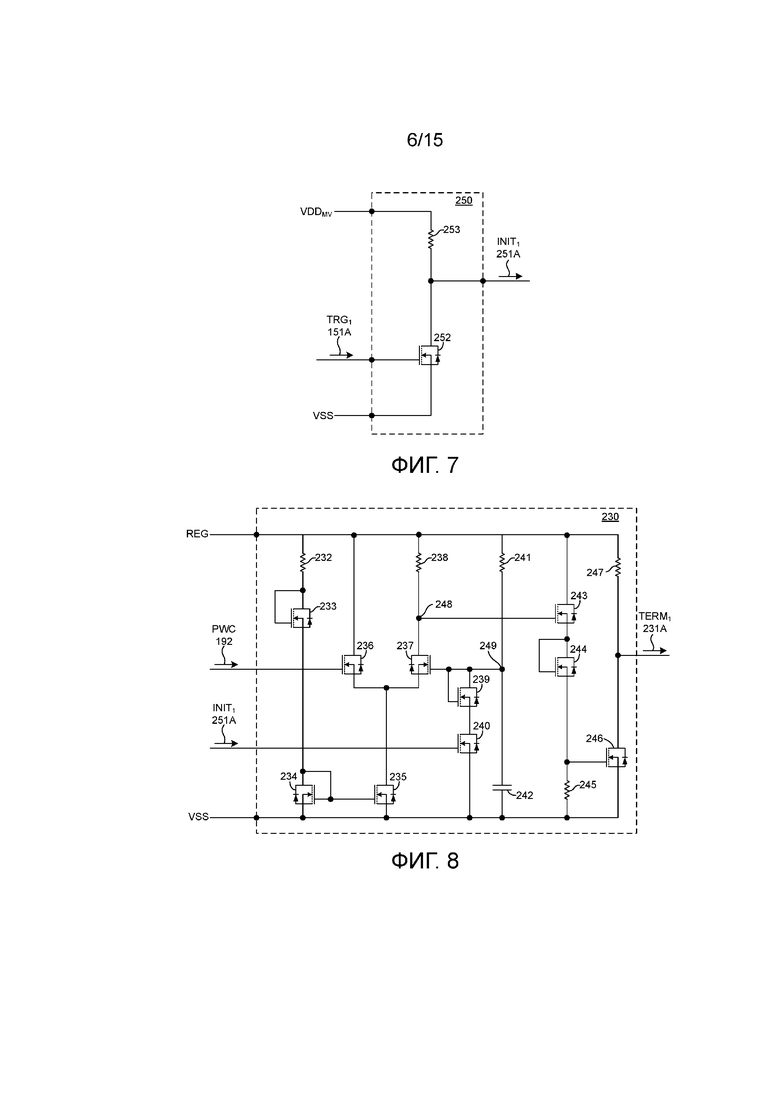
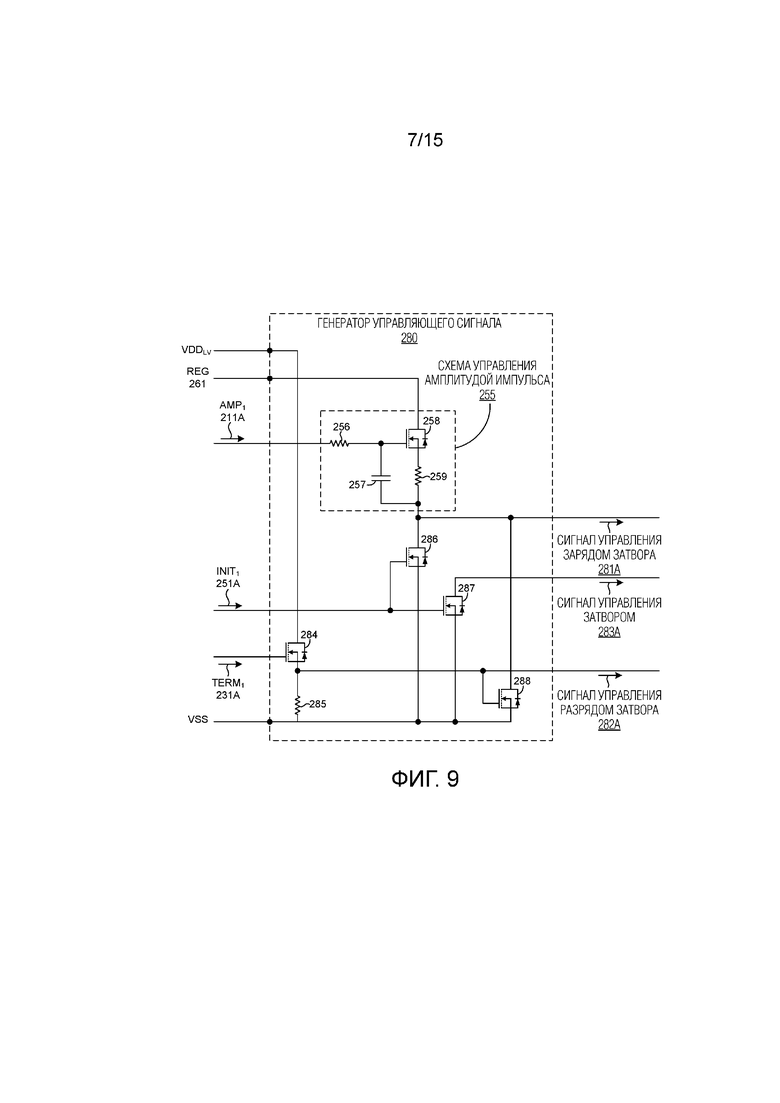
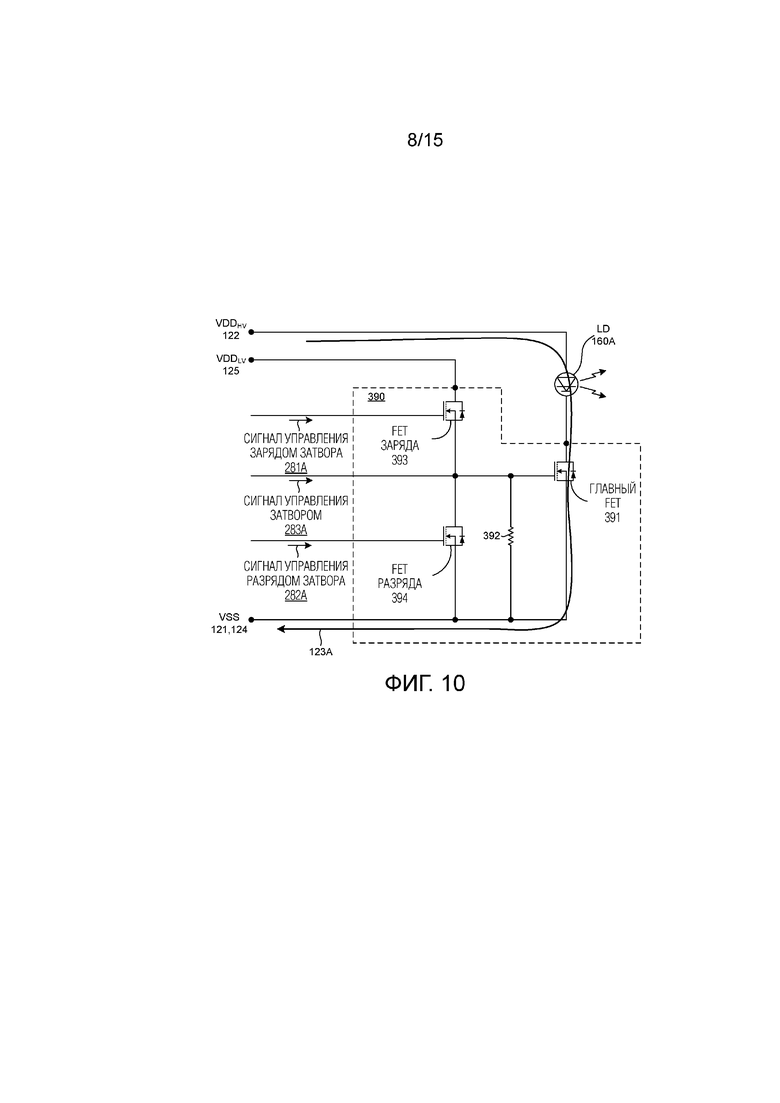
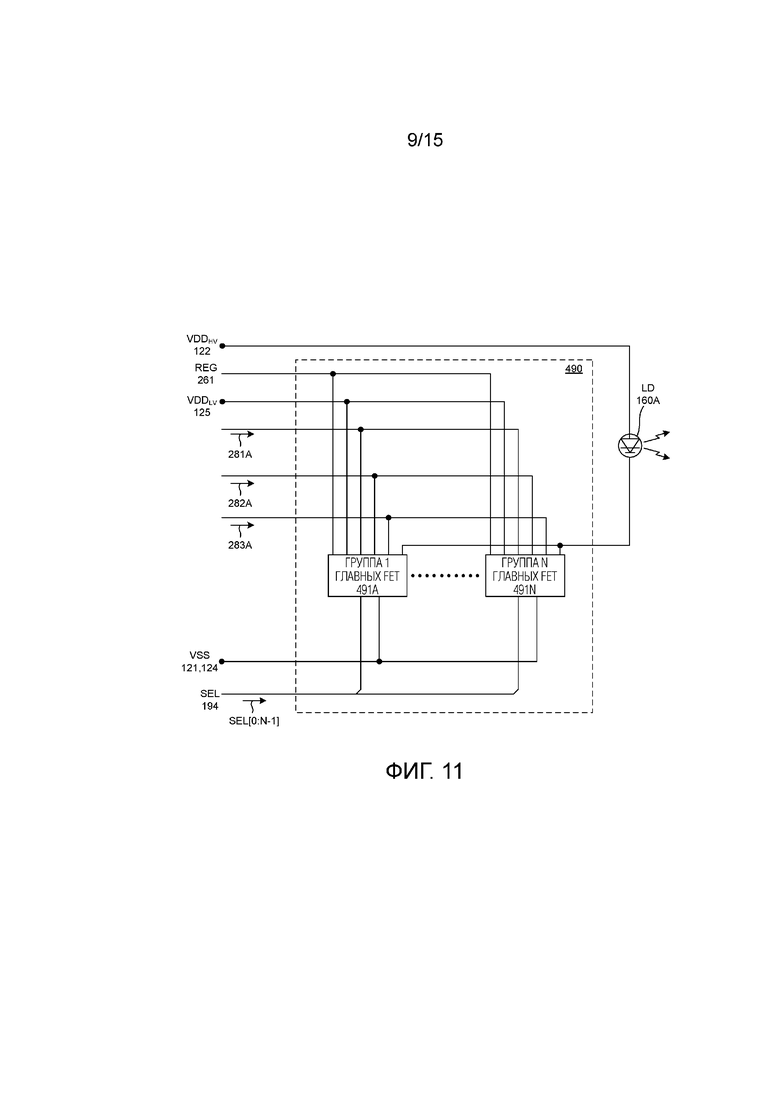
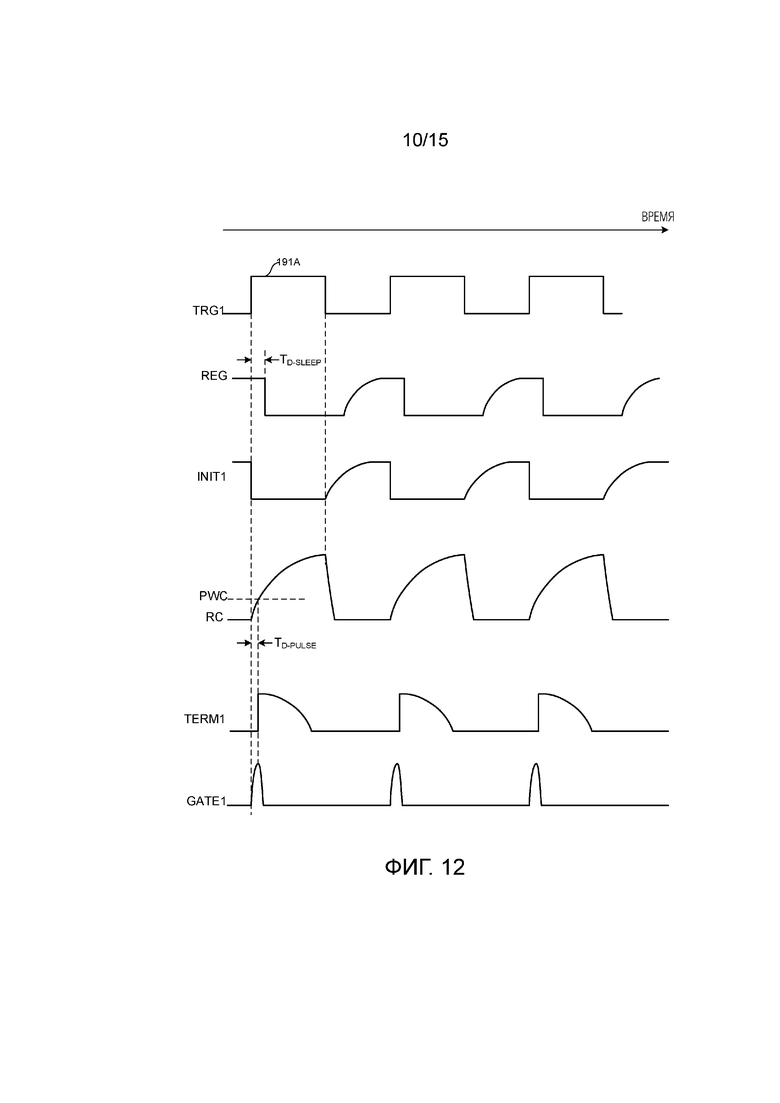
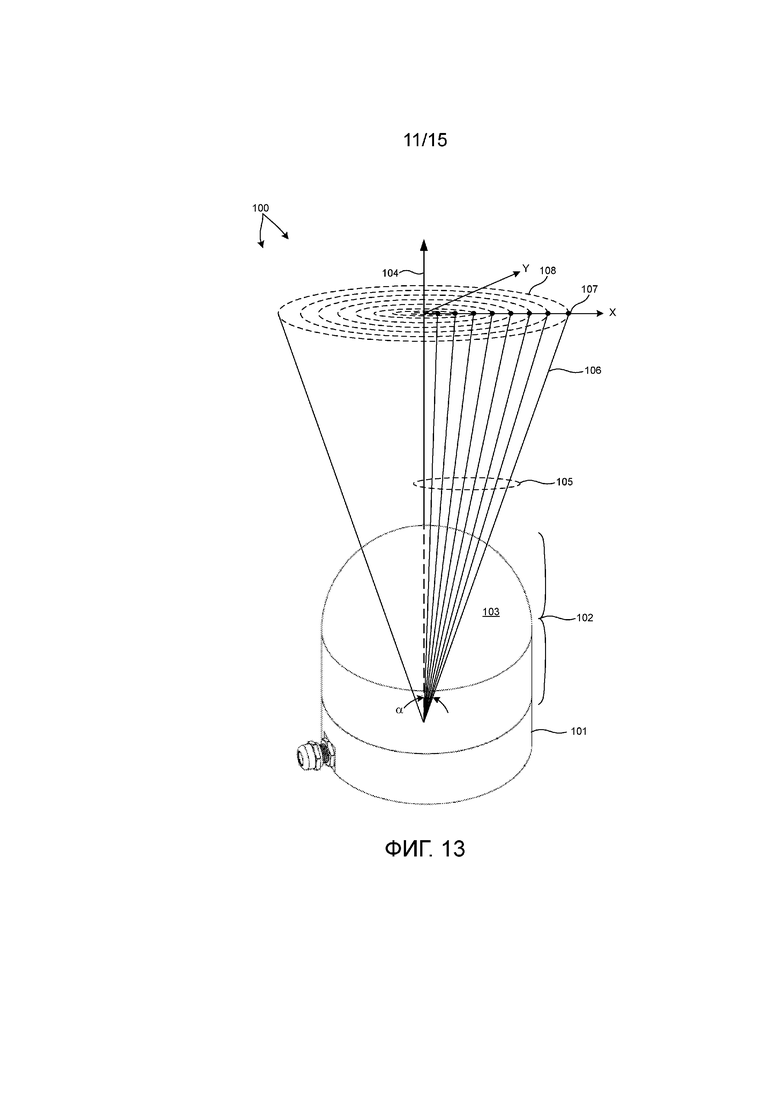
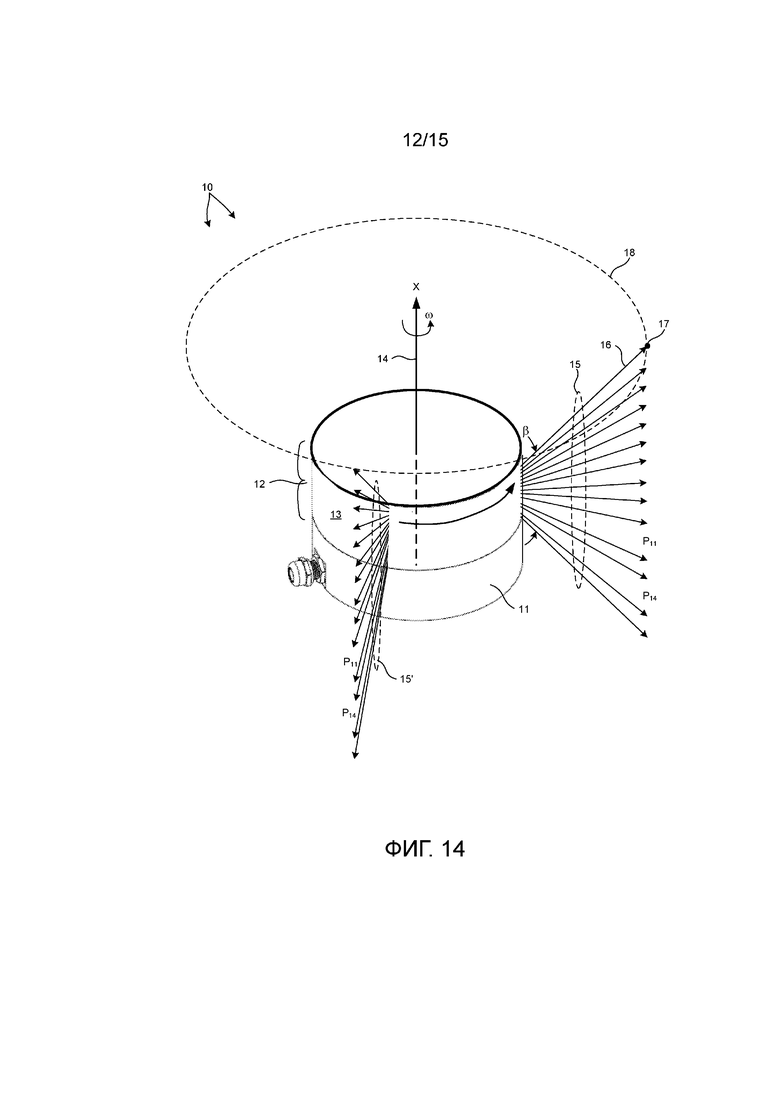
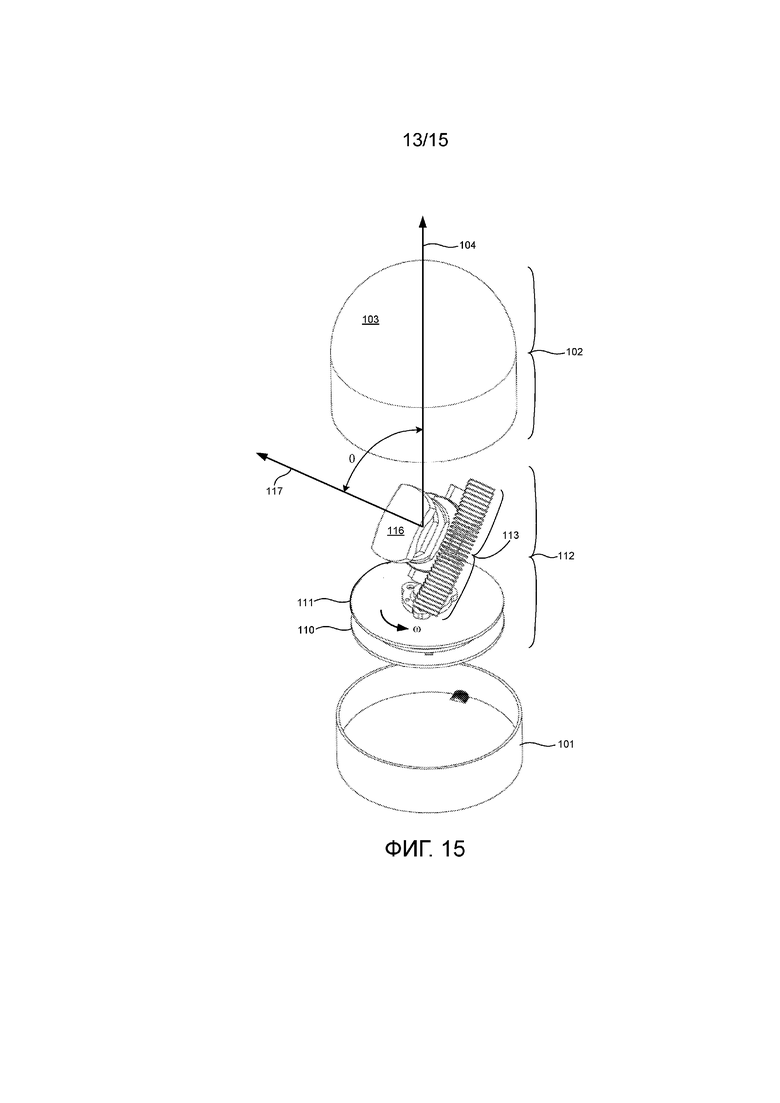
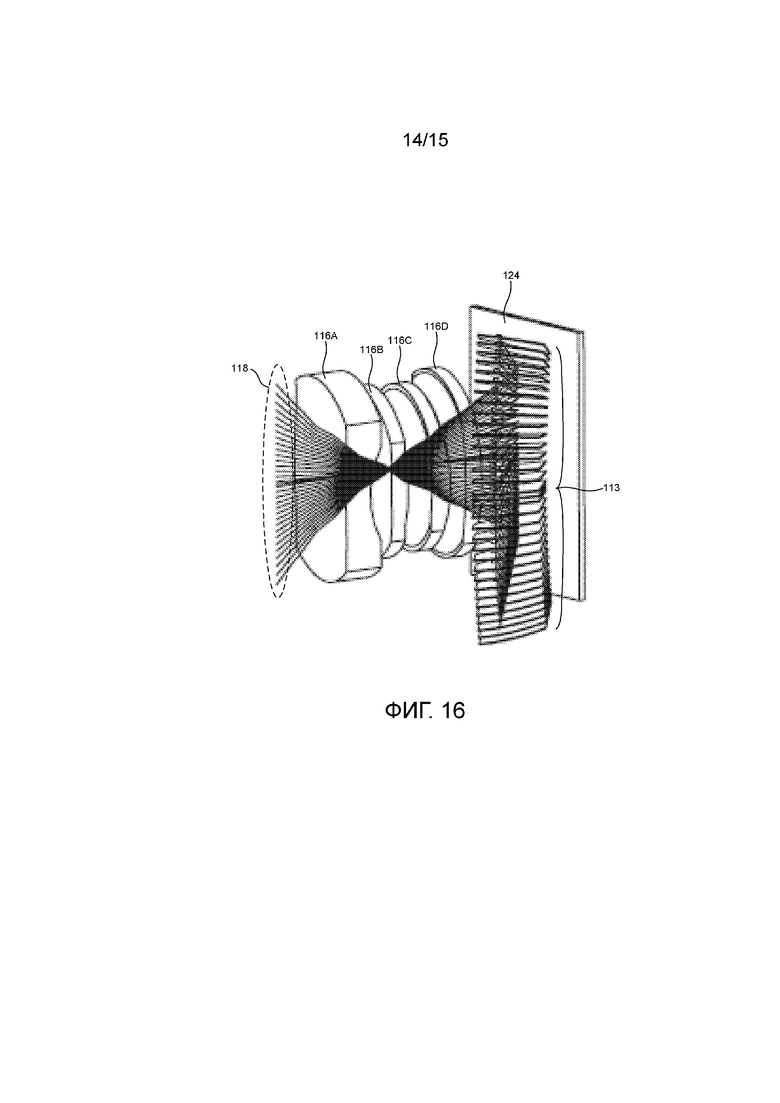
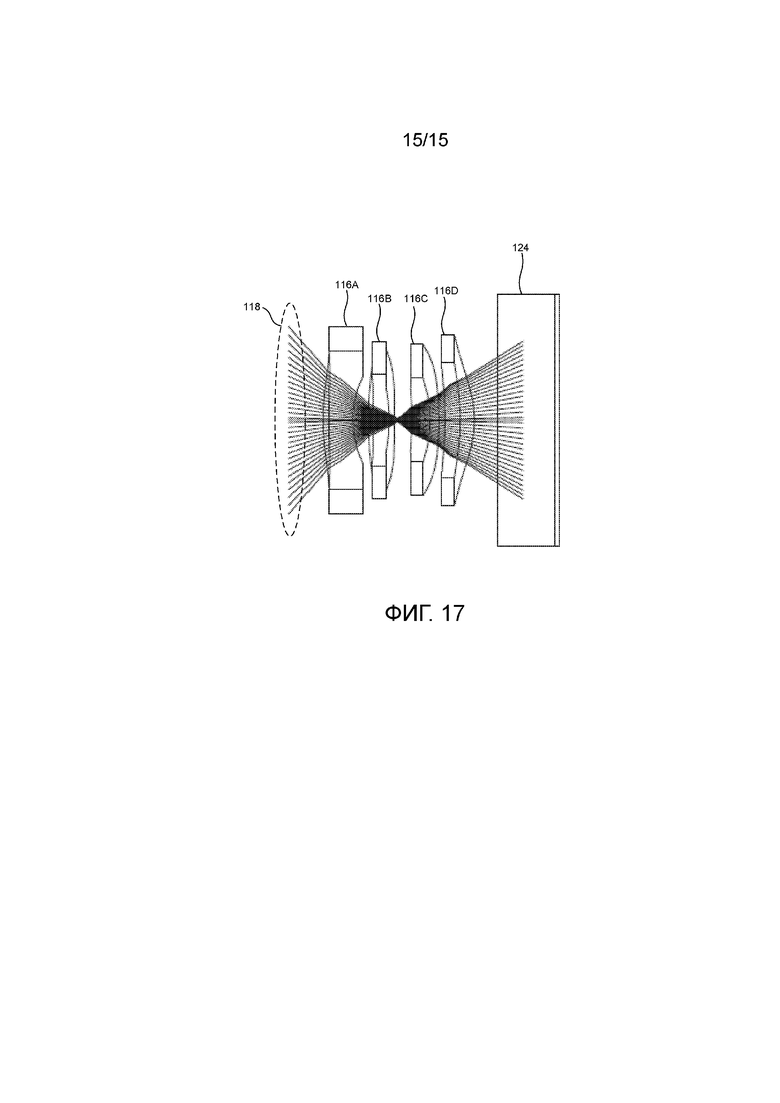
Изобретение относится к LIDAR-системам измерения с 3D-облаком точек. Сущность: в измерительной LIDAR-системе применяется интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) формирователя облучения. В одном аспекте IC выборочно соединяет каждый источник облучения, ассоциированный с каждым измерительным каналом, с источником электрической мощности, чтобы формировать измерительный импульс облучающего света. В одном аспекте каждый сигнал запуска импульса, ассоциированный с каждым измерительным каналом, принимается на отдельном узле IC. В другом аспекте дополнительные управляющие сигналы принимаются на раздельных узлах IC и передаются всем измерительным каналам. В другом аспекте IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения включает в себя модуль регулирования мощности, который подает отрегулированное напряжение различным элементам каждого измерительного канала, только когда какой-либо сигнал запуска импульса находится в состоянии, которое запускает вспышку облучающего импульса. Технический результат: улучшение в электронике возбуждения облучения и электронике приемника LIDAR-систем для улучшения разрешения формирования изображений и дальности действия. 3 н. и 17 з.п. ф-лы, 17 ил.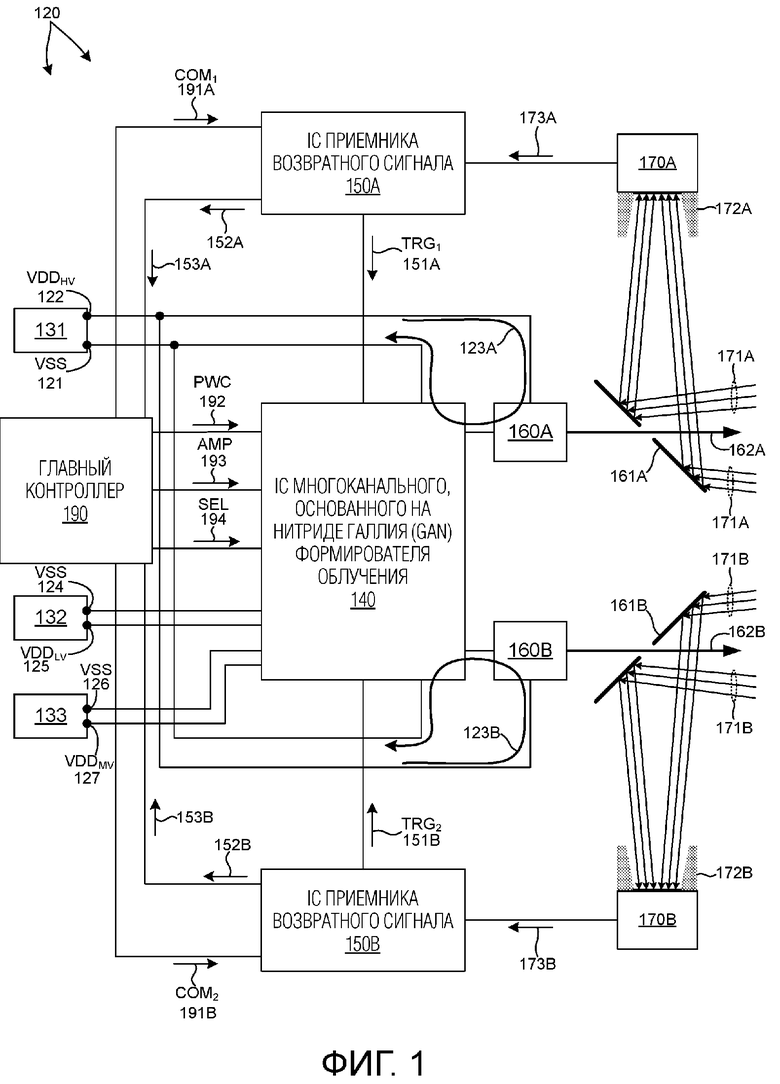
1. Измерительное LIDAR-устройство, содержащее:
первый источник электрической мощности, имеющий первый узел и второй узел, при этом первый источник электрической мощности предоставляет первое напряжение между первым и вторым узлами;
первый источник облучения, имеющий первый узел и второй узел, при этом первый узел первого источника электрической мощности электрически соединяется с первым узлом первого источника облучения;
второй источник облучения, имеющий первый узел и второй узел, при этом первый узел первого источника электрической мощности электрически соединяется с первым узлом второго источника облучения; и
интегральную схему (IC) многоканального, основанного на нитриде галлия (GaN) формирователя облучения, содержащую:
первый модуль формирователя, электрически соединенный со вторым узлом первого источника облучения и со вторым узлом первого источника электрической мощности, причем первый модуль формирователя сконфигурирован, чтобы выборочно электрически соединять второй узел первого источника облучения со вторым узлом первого источника электрической мощности в ответ на первый сигнал запуска импульса в состоянии запуска, предписывающий первому источнику облучения испускать первый измерительный импульс облучающего света, при этом состояние запуска представляет собой состояние, которое запускает вспышку импульса; и
второй модуль формирователя, электрически соединенный со вторым узлом второго источника облучения и со вторым узлом первого источника электрической мощности, причем второй модуль формирователя сконфигурирован, чтобы выборочно электрически соединять второй узел второго источника облучения со вторым узлом первого источника электрической мощности в ответ на второй сигнал запуска импульса в состоянии запуска, предписывающий второму источнику облучения испускать второй измерительный импульс облучающего света во время, отличное от первого измерительного импульса облучающего света.
2. Измерительное LIDAR-устройство по п. 1, в котором IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения дополнительно содержит:
модуль регулирования мощности, электрически соединенный с первым и вторым модулями формирователей, при этом модуль регулирования мощности подает отрегулированную электрическую мощность первому и второму модулям формирователей, только когда какой-либо из первого сигнала запуска импульса и второго сигнала запуска импульса находится в состоянии запуска.
3. Измерительное LIDAR-устройство по п. 1, в котором первый сигнал запуска импульса и второй сигнал запуска импульса являются лишь сигналами, принятыми на IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, не передаваемыми первому и второму модулям формирователя.
4. Измерительное LIDAR-устройство по п. 2, в котором каждый модуль формирователя включает в себя:
модуль формирователя мощности, который выборочно электрически соединяет соответствующий источник облучения с первым источником электрической мощности на основе множества сигналов управления затвором, включающего в себя по меньшей мере сигнал управления зарядом затвора и сигнал управления разрядом затвора;
генератор управляющего сигнала, который формирует множество сигналов управления затвором на основе сигнала инициирования импульса, сигнала завершения импульса и сигнала регулирования амплитуды импульса канала; и
модуль управления мощностью, электрически соединенный с генератором управляющего сигнала, при этом модуль управления мощностью формирует сигнал регулирования амплитуды импульса канала на основе состояния запуска соответствующего сигнала запуска импульса и передает сигнал регулирования амплитуды импульса канала генератору управляющего сигнала.
5. Измерительное LIDAR-устройство по п. 4, в котором каждый модуль формирователя мощности дополнительно содержит:
первый полевой транзистор (FET), имеющий исток, сток, соединенный с первым узлом второго источника электрической мощности, и затвор, сконфигурированный, чтобы принимать упомянутый сигнал управления зарядом затвора;
второй FET, имеющий сток, соединенный с истоком первого FET, исток, соединенный со вторым узлом второго источника электрической мощности, и затвор, сконфигурированный, чтобы принимать упомянутый сигнал управления разрядом затвора; и
третий FET, имеющий затвор, соединенный с истоком первого FET и стоком второго FET, сток, соединенный со вторым узлом соответствующего источника облучения, и исток, соединенный со вторым узлом первого источника электрической мощности, при этом сигнал управления зарядом затвора предписывает выборочное соединение затвора третьего FET с первым узлом второго источника электрической мощности, и при этом сигнал управления разрядом затвора предписывает выборочное соединение затвора третьего FET со вторым узлом второго источника электрической мощности.
6. Измерительное LIDAR-устройство по п. 4, в котором каждый модуль формирователя мощности дополнительно содержит:
группу полевых транзисторов (FET), включающую в себя первое множество FET, функционирующих, чтобы электрически соединять соответствующий источник облучения с первым источником электрической мощности на основе значения первого бита сигнала выбора FET; и
вторую группу полевых транзисторов (FET), включающую в себя второе множество FET, функционирующих, чтобы электрически соединять соответствующий источник облучения с первым источником электрической мощности на основе значения второго бита сигнала выбора FET, при этом первое множество FET является другим числом FET по сравнению со вторым множеством FET.
7. Измерительное LIDAR-устройство по п. 4, в котором каждый модуль управления мощностью содержит:
модуль задержки, который принимает соответствующий сигнал запуска импульса и формирует задержанный сигнал запуска импульса; и
модуль экономии мощности, который принимает задержанный сигнал запуска импульса и формирует сигнал амплитуды импульса канала на основе задержанного сигнала запуска импульса и сигнала регулирования амплитуды импульса, принятого первым и вторым модулями формирователей.
8. Измерительное LIDAR-устройство по п. 2, в котором модуль регулирования мощности содержит:
логическую схему, которая принимает первый сигнал запуска импульса и второй сигнал запуска импульса и формирует входной сигнал в состоянии запуска, если какой-либо из первого сигнала запуска импульса и второго сигнала запуска импульса находится в состоянии запуска; и
модуль регулятора, который принимает входной сигнал и подает отрегулированную электрическую мощность к первому и второму модулям формирователей, когда входной сигнал находится в состоянии запуска.
9. Измерительное LIDAR-устройство по п. 4, в котором каждый модуль формирователя включает в себя генератор сигнала инициирования импульса, который формирует сигнал инициирования импульса на основе соответствующего сигнала запуска импульса и передает сигнал инициирования импульса генератору управляющего сигнала.
10. Измерительное LIDAR-устройство по п. 9, в котором каждый генератор сигнала инициирования импульса включает в себя:
резистор, имеющий первый узел и второй узел, при этом первый узел соединяется с первым узлом второго источника электрической мощности;
полевой транзистор (FET), имеющий исток, соединенный со вторым узлом второго источника электрической мощности, сток, соединенный со вторым узлом резистора, и затвор, при этом сигнал запуска импульса предоставляется на затворе FET, и при этом сигнал инициирования импульса предоставляется на стоке FET.
11. Измерительное LIDAR-устройство по п. 9, в котором каждый модуль формирователя включает в себя генератор сигнала завершения импульса, который принимает сигнал инициирования импульса и сигнал широтно-импульсного регулирования, принятый первым и вторым модулями формирователей, при этом генератор сигнала завершения импульса формирует сигнал завершения импульса на основе сигнала инициирования импульса, при этом задержка между сигналом инициирования импульса и сигналом завершения импульса основывается на сигнале широтно-импульсного регулирования.
12. Измерительное LIDAR-устройство по п. 4, в котором каждый генератор управляющего сигнала включает в себя схему регулирования амплитуды импульса, которая регулирует амплитуду соответствующего измерительного импульса облучающего света на основе сигнала регулирования амплитуды импульса канала, принятого от модуля управления мощностью.
13. Измерительное LIDAR-устройство по п. 12, в котором схема регулирования амплитуды импульса включает в себя:
первый резистор, имеющий первый узел и второй узел, при этом сигнал регулирования амплитуды импульса канала предоставляется на первом узле первого резистора;
FET, имеющий исток, затвор, соединенный со вторым узлом первого резистора, и сток, соединенный с выходным узлом модуля регулирования мощности;
второй резистор, имеющий первый узел, соединенный с истоком FET, и второй узел, соединенный с затвором FET управления зарядом; и
конденсатор, имеющий первый узел, соединенный со вторым узлом первого резистора, и второй узел, соединенный со вторым узлом второго резистора.
14. Измерительное LIDAR-устройство по п. 1, дополнительно содержащее:
первый фотодетектор, сконфигурированный, чтобы обнаруживать первый возвратный импульс света и формировать первый выходной сигнал, указывающий обнаруженный первый возвратный импульс, при этом первый возвратный импульс включает в себя количество света, отраженного из первого местоположения в окружающей обстановке, облучаемой посредством первого измерительного импульса облучающего света;
первую IC приемника возвратного импульса, сконфигурированную, чтобы определять время пролета первого измерительного импульса от LIDAR-устройства до первого местоположения в трехмерном окружении и обратно к LIDAR-устройству на основе первого выходного сигнала, при этом первая IC приемника возвратного импульса формирует первый сигнал запуска импульса и передает первый сигнал запуска импульса в IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения;
второй фотодетектор, сконфигурированный, чтобы обнаруживать второй возвратный импульс света и формировать второй выходной сигнал, указывающий обнаруженный второй возвратный импульс, при этом второй возвратный импульс включает в себя количество света, отраженного из второго местоположения в окружающей обстановке, облучаемой посредством второго измерительного импульса облучающего света; и
вторую IC приемника возвратного импульса, сконфигурированную, чтобы определять время пролета второго измерительного импульса от LIDAR-устройства до второго местоположения в трехмерном окружении и обратно к LIDAR-устройству на основе второго выходного сигнала, при этом вторая IC приемника возвратного импульса формирует второй сигнал запуска импульса и передает второй сигнал запуска импульса в IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения.
15. Интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) LIDAR-формирователя облучения, содержащая:
первый модуль формирователя, электрически соединенный с источником электрической мощности и первым LIDAR-источником облучения, причем первый модуль формирователя сконфигурирован, чтобы выборочно электрически соединять первый LIDAR-источник облучения с источником электрической мощности в ответ на первый сигнал запуска импульса в состоянии запуска, предписывающий первому LIDAR-источнику облучения испускать первый измерительный импульс облучающего света, при этом состояние запуска представляет собой состояние, которое запускает вспышку импульса;
второй модуль формирователя, электрически соединенный с источником электрической мощности и вторым LIDAR-источником облучения, причем второй модуль формирователя сконфигурирован, чтобы выборочно электрически соединять второй LIDAR-источник облучения с источником электрической мощности в ответ на второй сигнал запуска импульса в состоянии запуска, предписывающий второму источнику LIDAR-облучения испускать второй измерительный импульс источника облучения во время, отличное от первого измерительного импульса облучающего света; и
модуль регулирования мощности, электрически соединенный с первым и вторым модулями формирователей, при этом модуль регулирования мощности подает отрегулированную электрическую мощность первому и второму модулям формирователей, только когда какой-либо из первого сигнала запуска импульса и второго сигнала запуска импульса находится в состоянии запуска.
16. Интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) LIDAR-формирователя облучения по п. 15, в которой первый сигнал запуска импульса и второй сигнал запуска импульса являются лишь сигналами, принятыми на IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, не передаваемыми первому и второму модулям формирователей.
17. Интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) LIDAR-формирователя облучения по п. 15, в которой каждый модуль формирователя включает в себя:
модуль формирователя мощности, который выборочно электрически соединяет соответствующий источник облучения с источником электрической мощности на основе множества сигналов управления затвором, включающего в себя по меньшей мере сигнал управления зарядом затвора и сигнал управления разрядом затвора, причем сигнал управления зарядом затвора и сигнал управления разрядом затвора подаются на один или более затворов одного или более полевых транзисторов (FET);
генератор управляющего сигнала, который формирует множество сигналов управления затвором на основе сигнала инициирования импульса, сигнала завершения импульса и сигнала регулирования амплитуды импульса канала; и
модуль управления мощностью, электрически соединенный с генератором управляющего сигнала, при этом модуль управления мощностью формирует сигнал регулирования амплитуды импульса канала на основе состояния запуска соответствующего сигнала запуска импульса и передает сигнал регулирования амплитуды импульса канала генератору управляющего сигнала.
18. Интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) LIDAR-формирователя облучения, содержащая:
первый узел, сконфигурированный, чтобы принимать первый сигнал запуска импульса;
второй узел, сконфигурированный, чтобы принимать второй управляющий сигнал запуска импульса;
первый модуль формирователя, электрически соединенный с источником электрической мощности и первым LIDAR-источником облучения, причем первый модуль формирователя сконфигурирован, чтобы выборочно электрически соединять первый LIDAR-источник облучения с источником электрической мощности в ответ на первый сигнал запуска импульса в состоянии запуска, предписывающий первому LIDAR-источнику облучения испускать первый измерительный импульс облучающего света, при этом состояние запуска представляет собой состояние, которое запускает вспышку импульса; и
второй модуль формирователя, электрически соединенный с источником электрической мощности и вторым LIDAR-источником облучения, причем второй модуль формирователя сконфигурирован, чтобы выборочно электрически соединять второй LIDAR-источник облучения с источником электрической мощности в ответ на второй сигнал запуска импульса в состоянии запуска, предписывающий второму LIDAR-источнику облучения испускать второй измерительный импульс облучающего света во время, отличное от первого измерительного импульса облучающего света, при этом первый сигнал запуска импульса и второй сигнал запуска импульса являются лишь сигналами, принимаемыми на IC многоканального, основанного на нитриде галлия (GaN) формирователя облучения, не передаваемыми первому и второму модулям формирователей.
19. Интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) LIDAR-формирователя облучения по п. 18, дополнительно содержащая:
модуль регулирования мощности, электрически соединенный с первым и вторым модулями формирователей, при этом модуль регулирования мощности подает отрегулированную электрическую мощность первому и второму модулям формирователей, только когда какой-либо из первого сигнала запуска импульса и второго сигнала запуска импульса находится в состоянии запуска.
20. Интегральная схема (IC) многоканального, основанного на нитриде галлия (GaN) LIDAR-формирователя облучения по п. 18, в которой каждый модуль формирователя включает в себя:
модуль формирователя мощности, который выборочно электрически соединяет соответствующий источник облучения с источником электрической мощности на основе множества сигналов управления затвором, включающего в себя по меньшей мере сигнал управления зарядом затвора и сигнал управления разрядом затвора, причем сигнал управления зарядом затвора и сигнал управления разрядом затвора подаются на один или более затворов одного или более полевых транзисторов (FET);
генератор управляющего сигнала, который формирует множество сигналов управления затвором на основе сигнала инициирования импульса, сигнала завершения импульса и сигнала регулирования амплитуды импульса канала; и
модуль управления мощностью, электрически соединенный с генератором управляющего сигнала, при этом модуль управления мощностью формирует сигнал регулирования амплитуды импульса канала на основе состояния запуска соответствующего сигнала запуска импульса и передает сигнал регулирования амплитуды импульса канала генератору управляющего сигнала.
| ЛИДАР | 1993 |
|
RU2061224C1 |
| US 20160021713 A1, 21.01.2016 | |||
| WO 2018125823 A1, 05.07.2018 | |||
| US 20170350983 A1, 07.12.2017 | |||
| WO 2017210418 A1, 07.12.2017. | |||

