В мировом эксплуатируемом парке ветровые энергетические установки с горизонтальной осью (ВЭУГО) составляет более 90%, их серийным выпуском занимаются тысячи предприятий. Эффективность ВЭУГО достижима только при условии обеспечения постоянной коллинеарности оси ветродвигателя и направления воздушного потока (ВП). Недостатком традиционной конструкции ВЭУГО является малая поверхность лопасти, а как следствие этого - начальный крутящий момент близок к нулю, и поэтому запуск таких ветродвигателей затруднен. Мощные установки вообще приходится раскручивать от постороннего источника. Скорость концов лопастей ветродвигателя при сильном ВП может приближаться к скорости звука, создавая шум как у винтомоторного самолета и помехи для электронных устройств, а его лопасти бьют птицу и другую летающую живность. При повороте ветродвигателя с изменением направления ВП на лопасти действует гироскопический момент, стремящийся дважды на каждом обороте изогнуть лопасть (вперед и назад), а это может вызывать большие напряжения, приводящие иной раз и к отрыву лопастей. Чтобы избежать этого, лопасти максимально облегчают и применяют специальные устройства - виндрозы, осуществляющие очень медленный поворот ветродвигателя. Система виндроз и другие дополнительные устройства значительно усложняют и повышают стоимость ВЭУГО. В ВЭУГО значительной мощности окружная скорость на длине лопасти возрастает по мере удаления ее элементов от оси вращения, относительная скорость W набегания ВП на лопасть также возрастает. Вместе с этим убывает угол атаки α, и при некоторой окружной скорости ωR, где ω - угловая скорость, этот угол станет отрицательным. При отсутствии контроля за линейной скоростью концов лопастей не все элементы крыла будут иметь максимальную подъемную силу.
В литературе можно найти многочисленные аналитические исследования систем увеличения мощности с целью улучшения характеристик ветряных турбин за счет увеличения плотности энергии воздуха на роторе. Работа (Khamlaj, Т.А.; Rumpfkeil, М.Р. 2017) расширяет полуэмпирическую модель ветряной турбины с кожухом, для включения в систему сходящегося-расходящегося сопла. Увеличение массового расхода может быть достигнуто за счет двух основных принципов: увеличения соотношения площадей и/или уменьшения отрицательного противодавления на выходе (Тахо-Годи А.З. КОНЦЕНТРАТОР ВОЗДУШНОГО ПОТОКА ДЛЯ ВЕТРОЭЛЕКТРИЧЕСКОЙ СТАНЦИИ, УПРАВЛЯЕМЫЙ СЛЕДЯЩЕЙ СИСТЕМОЙ С КОНТУРОМ ОПТИМАЛЬНОГО РЕГУЛИРОВАНИЯ УГЛА РАСТРУБНОСТИ // Фундаментальные исследования. - 2015. - №2-14. - С. 3056-3058; URL: http://fundamental-research.ru/ru/article/view?id=37690 (дата обращения: 02.12.2020). Теоретический анализ предсказывает идеальный коэффициент тяги ниже или выше 8/9, в зависимости от коэффициента противодавления, при котором закрытая ветротурбина работает. Радикальным повышением скорости ВП для ветротурбин является применение летающих ветроэнергетических установок (например, Способ преобразования кинетической энергии ветра на летающей ветроэнергетической установке. Патент №2697075. Опубликовано 12.08.2019 г. Бюлл. №23.) В отличие от больших ветрогенераторов с горизонтальной осью, которые установлены в районах с оптимальными ветровыми условиями, небольшие ветряные турбины устанавливаются для выработки энергии независимо от благоприятных ветровых условий. Выработка электроэнергии ветротурбиной зависит от размера ее ротора, и в настоящее время на рынке доступны ветряные турбины с большим диаметром ротора (>175 м). Однако основными проблемами, связанными с такими крупногабаритными обычными турбинами, являются их стоимость и шумовое загрязнение. Обзор (Hansen, Colin and Hansen, Kristy. 2020) посвящен крупномасштабным ветротурбинам с горизонтальной осью. Последние разработки в области исследований шума ветровых турбин с горизонтальной осью суммированы. Значительный прогресс достигнут в понимании генерации и распространения шума ветряных турбин, а также влияния шума ветряных электростанций на людей, птиц и животных. В дополнение к озабоченности сообщества по поводу влияния шума ветряных электростанций на людей и того, как наилучшим образом регулировать шум ветряных электростанций и проверять установленные ветряные электростанции на соответствие, производители турбин проявляют значительный интерес к разработке более тихих роторов с намерением разрешить установку ветровых электростанций ближе к населенным пунктам. Рассматриваются различные механизмы генерации шума в ветряных турбинах и возможные методы снижения шума (Deshmukha, Shubham, et al. 2018). Параллельно ведется разработка новых конструкций ветроустановок с различными вариантами концентрации ВП и минимизации экологических отрицательных факторов при эксплуатации мощных ВЭУГО. Например, в конструкции Ветроэлектростанции, принимаемой за аналог (Патент РФ №2697245. Опубликовано 13.08.2019 г. Бюлл. №23.). Минимизация размеров бицилиндрической турбины при повышении ее эффективности достигается за счет разной ометаемой площади воздухосборника и кольца, образованного внешним и внутренним цилиндрами, в котором находятся ее крылья. При этом повышается скорость ВП, поступающего на ее крылья. Все крылья бицилиндрической турбины зафиксированы вначале и в конце в подшипниках, что существенно снижает уровень их вибрации и связанные с этим шумовые эффекты и электрические помехи. Кроме того через многоосевой конический дифференциальный редуктор задается оптимальный угол атаки всем крыльям турбины с учетом действующего на них результирующего ВП по методике изложенной в (Ю.Б. Соколовский, В.М. Роткин. Теоретические и технические основы оптимизации ветровых энергетических установок. LuluPress, Inc. 2017. 112 с) повышая ее эффективность.
В качестве прототипа для Ветрогенерирующего устройства принимаем английский патент:
UK Patent Application GB 2454024 A, Date of a publication 29.042009. Это ветрогенерирующее устройство состоит из цельного симметричного аэродинамического крыла без движущихся закрылков. Оно повернуто и на оси уравновешено в средней точке хорды крыла, генерирующего подъемную силу в вертикальном направлении и прикрепленного с помощью рычагов к вращающемуся приводу для получения и производства энергии. Ветрогенерирующее устройство имеет управляемые исполнительные механизмы для оптимизации угла атаки аэродинамического крыла для различных ветров и скоростей устройства. Оно имеет компьютер или микропроцессор, управляющий испролнительными механизмами установки угла атаки с использованием информации от тензодатчиков или датчиков силы, установленных на устройстве для поддержания аэродинамического крыла под оптимльным углом атаки. Устройство имеет систему тяг на одном конце крыла, состоящего из 2-х поршней и цилиндров, для изменения угла атаки крыла в конце каждого вертикального хода, а также для обеспечения эффекта демпфирования скорости и изменения угла наклона крыльев. Устройство имеет пружину по центру, которая помогает удерживать аэродинамическое крыло против ограничителей угла атаки во время каждого вертикального хода. Устройство работающее вместе с идентичным устройством, прикрепленным к тому же самому маховику, сдвинут по фазе на 90 градусов для обеспечения плавной работы над верхней и нижней мертвой точкой ходов кэширующих устройств. В прототипе в отличии от классических ВЭУГО вместо проблемных длинных крыльев-лопастей возможен набор крыльев небольшого размера, фиксированных в 2-х точках (на оси в средней точке хорды и верхним или нижним ограничителями), что естественно минимизирует шумовое загрязнение и помехи. Кроме того для каждого из этих крыльев задается оптимальный угол атаки относительно действующего результирующего ВП, повышая их эффективность.
Недостатком конструкции прототипа является сложная механическая часть системы управления с цилиндрами, рычагами и пружиной. Эксплуатация этого ветрогенерирующего устройства проблематична.
При разработке конструкции нового ветрогенерирующего устройства (ВУ) решалась задача по минимизации ряда недостатков ВЭУГО традиционной конструкции. Решено расчленить ее длинные лопасти на отдельные фрагменты для более четкого оптимального управления их углом атаки, повышения надежности конструкции, существенного снижения экологических проблем и стоимости конструкции. Разработанное ВУ состоит из цельных симметричных аэродинамических крыльев, закрепленных на осях, проходящих через средние точки хорд крыльев. Оно имеет компьютер или микропроцессор, управляющий исполнительными механизмами установки угла атаки аэродинамических крыльев для различных скоростей ВП и движения самого устройства с использованием информации от комплекта датчиков. При этом установлены два комплекта по N симметричных аэродинамических крыльев с закрылками в кассетах на колесиках. Концы крыльев и закрылков в каждой кассете объединены соединительными планками, на оси контрольного крыла в каждой кассете установлен датчик положения, а на оси контрольного закрылка в каждой кассете установлен реверсивный электропривод в качестве исполнительного механизма, обеспечивающего оптимальное положение углов атаки всех симметричных аэродинамических крыльев каждого комплекта, но направленных в противоположные стороны относительно другой кассеты. Каждая из двух кассет через шарнир и шток соединена с колен валом и движется в прямоугольной обойме с внутренним профилем для колесиков кассет вперед-назад. К боковым сторонам прямоугольной обоймы перпендикулярно ее плоскости с подветренной стороны закреплены флюгерные аэродинамические крылья с выпуклостью внутрь прямоугольной обоймы. Посредине верхней и нижней стороны обоймы закреплены подшипники, через которые проходит коленвал, фиксируя свое положение в верхнем и нижнем опорном подшипниках, встроенных в базовую конструкцию ветрогенерирующего устройства. Причем коленчатый вал, пройдя через нижний опорный подшипник, подсоединен через соединительную муфту к электроэнергетическому блоку.
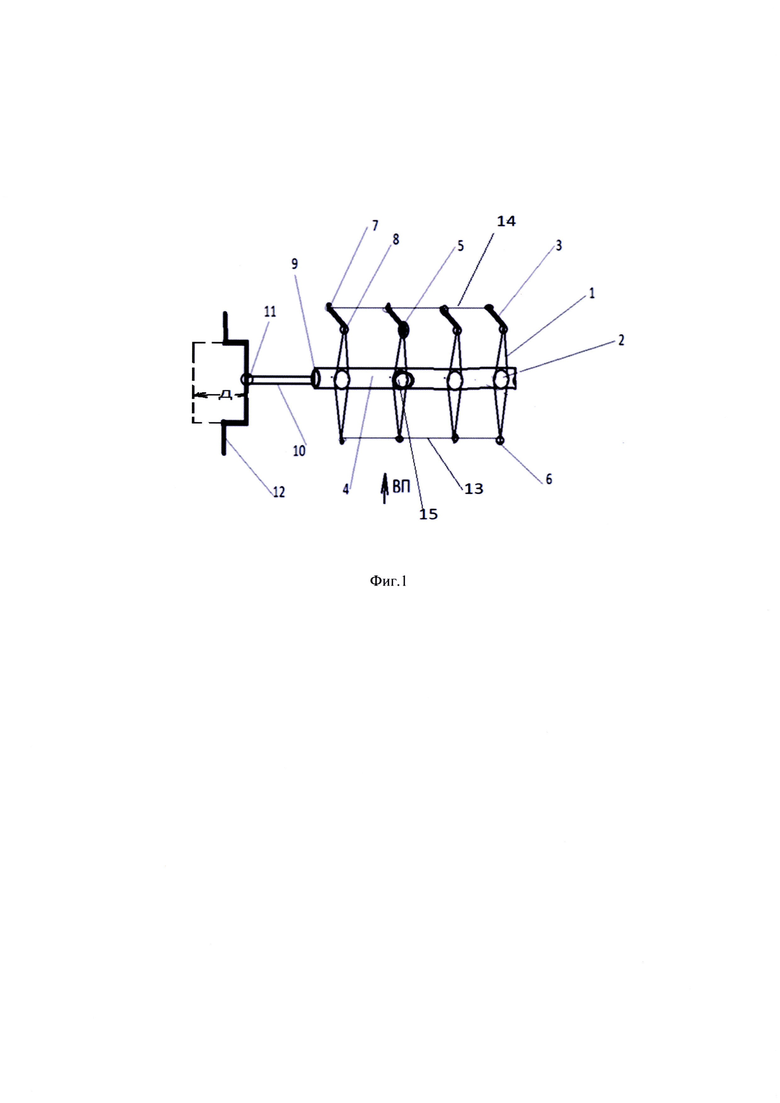
Главный конструктивный узел ВУ - кассета с N симметричных аэродинамических крыльев и закрылков дан на Фиг. 1 - вид сверху, где 1 - симметричное аэродинамическое крыло, 2 - ось крыла, 3 - закрылок, 4 - кассета, 5 - электропривод контрольного закрылка, 6 - шарниры на передних концах крыльев, 7 - шарниры на концах закрылков, 8 - общий шарнир крыльев и закрылков, 9 - шарнир кассета-шток, 10 - шток, 11 - шарнир шток-коленвал, 12 - коленвал, 13 - соединительная планка крыльев, 14 - соединительная планка закрылков, 15 - датчик положения контрольного крыла - 1.
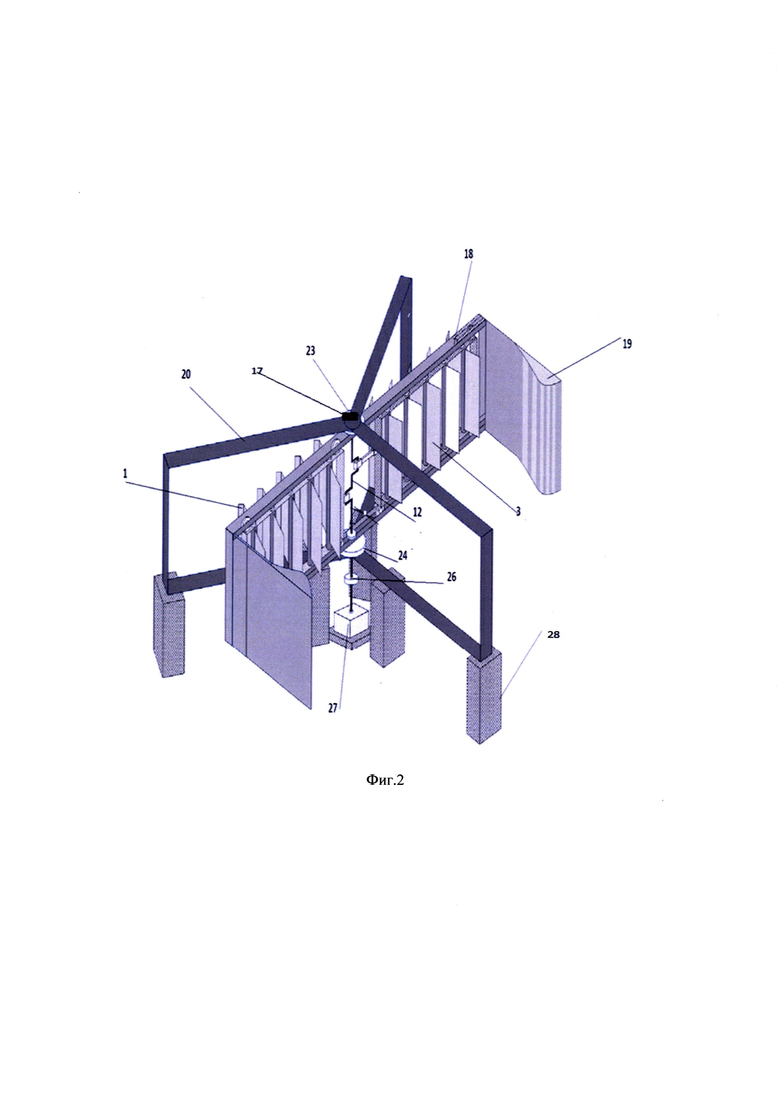
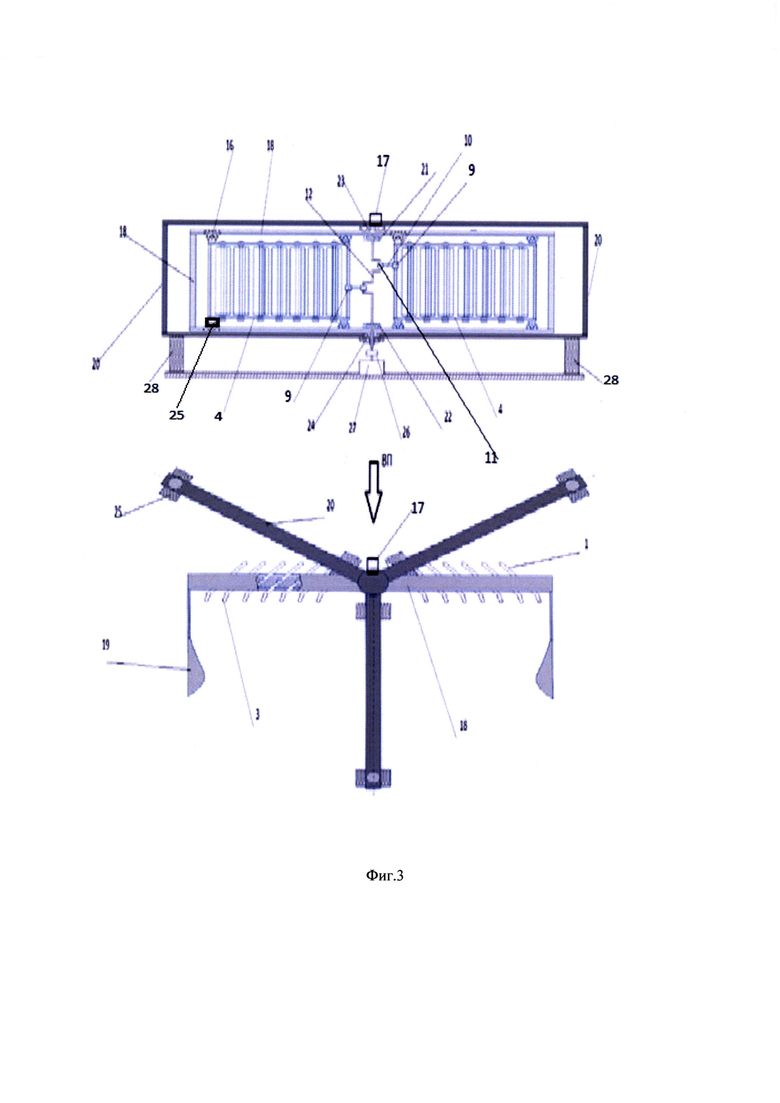
Общий вид ВУ дан на Фиг. 2, 3 - где 1 - симметричные аэродинамические крылья, 3 - закрылки, 4 - кассеты, 10 - шток, 11 - шарнир шток-колленвал, 12 - коленвал, 16 - колесики кассеты, 9 - шарнир кассеты, 17 - датчик скорости ВП, 18 - прямоугольная обойма, 19 - флюгерные аэродинамические крылья, 20 - базовая конструкция ветрогенерирующего устройства, 21 - верхний подшипник обоймы, 22 - нижний подшипник обоймы, 23 - верхний опорный подшипник базовой конструкции, 24 - нижний опорный подшипник базовой конструкции, 25 - датчик скорости движения кассет - 4, 26 - соединительная муфта, 27 - электроэнергетический блок, 28 - опорные балки.
Обе кассеты - 4 установлены в прямоугольной обойме - 18, горизонтальные стороны которой имеют профилипрванные канавки, в которых в процессе работы ВУ при перемещении кассет движутся их колесики - 16. Посередине горизонтальных сторон обоймы - 18 закреплены верхний - 21 и нижний - 22 подшипники, через которые проходит коленвал - 12. Каждая из кассет подсоединена к коленвалу - 12 через шарниры 9, 11 и штоки - 10. В каждой из кассет на осях 2 закреплено N симметричных аэродинамических крыльев - 1, передние концы которых через шарниры - 6 объеденены соединительными планками крыльев - 13, а к задним их концам через шарниры - 8 подсоединены закрылки - 3. Закрылки 3 с помощью соединительной планки закрылков - 14 объеденены через шарниры - 7. На общую систему установки крыльев и закрылков данной кассеты - 4 воздействует электропривод контрольного крыла - 5, задавая угол атаки и их полярности. Управляется он компьютером или микропроцессором, задавая оптимальный угол атаки аэродинамических крыльев-1 для различных скоростей ВП и движения самой кассеты с использованием информации от комплекта датчиков (датчика положения - 15 на оси контрольного крыла, датчика скорости движения кассет - 25, датчика скорости ВП - 17). Обойма - 18 с кассетами - 4 зафиксирована на коленвалу - 12 с помощью верхнего опорного подшипника базовой конструкции - 23 и нижнего опорного подшипника базовой конструкции -24. К боковым сторонам прямоугольной обоймы - 18, перпендикулярно ее плоскости с подветренной стороны, закреплены флюгерные аэродинамические крылья - 19 с выпуклостью внутрь прямоугольной обоймы. Они обеспечивают более эффективную ориентацию обоймы - 18 перпендикудярно вектору воздушного потока, чем обычные плоские флюгеры, сверху и и снизу базовой конструкции - 20 закреплены опорные подшипники - 23, 24 через которые проходит коленвал - 12, причем его нижний конец, пройдя через нижний опорный подшипник - 24 через соединительную муфту - 26 подсоединяется к электроэнергетическому блоку - 27. Базовая конструкция ВУ - 20 устанавливается на опорных балках - 28.
Работа ветрогенерирующего устройства.
1. Для эффективной работы BP необходимо провести эффективную ориентацию обоймы - 18 с кассетами - 4 перпендикудярно вектору воздушного потока. Ориентация осуществляется под воздействием флюгерных крыльев - 19. При достижении этого положения выпуклая часть крыльев - 19 затенена обоймой - 18 и они обтекаются симметричными воздушными потоками. При малейшем отклонении обоймы - 18 от положения перпендикудярного вектору воздушного потока одно из крыльев затеняется обоймой - 18, а на противоположное флюгерное крыло 19 действует активный ВП. При этом на последнем формируется аэродинамическая сила направленная в сторону противоположного крыла, востанавливая их симметричное положение относительно вектора ВП. Надежное вращение обоймы - 18 вокруг коленвала - 12 обеспечивается подшипниками - 21, 22, а относительно базовой конструкции - опорными подшипниками - 23, 24.
2. Необходимо обеспечить оптимальный угол атаки всех 2N симметричных аэродинамических крыльев - 1 с закрылками - 3. Эта задача решается компьютером или микропроцессором, например, по известному алгоритму (Ю.Б. Соколовский, В.М. Роткин. Теоретические и технические основы оптимизации ветровых энергетических установок. LuluPress, Inc. 2017. 112), вычисляя углы атаки аэродинамических крыльев для различных скоростей ВП и движения самого устройства с использованием информации от комплекта датчиков (датчика положения - 15 на оси контрольного крыла, датчика скорости движения кассет - 25, датчика скорости ВП - 17) и отрабатывания их реверсивным электроприводом - 5 в каждой кассете - 4. При этом осуществляется движение каждой кассеты "вперед-назад" в пределах пути Д (задаваемого конструкцией коленвала - 12).
3. 2N симметричных аэродинамических крыльев - 1 с закрылками - 3 в 2-х кассетах создают значительный вращающий момент на коленвал - 12. Коленвал 12 через соединительную муфту передает вращение на электроэнергетический блок - 27 на базе электрогенератора.
ВУ имеет 2N крыльев небольшой величины на осях. К тому же их передние концы с шарнирами - 6 объединены соединительной планкой - 13. Такая конструкция минимизирует вибрации на крыльях, упрощая требования к прочности материала крыльев, удешевляя ВУ. К тому же электроэнергетический блок - 27 находится на земле. При увеличении мощности ВУ ее размеры будут увеличиваться в основном по горизонтали, снижая опрокидывающий момент относительно мощных классических ВЭУГО.
Предполагается, что данная конструкция проявит свои преимущества при мощности отдельной установки от 0,5 мвт. и коэффициенте скорости кромки лопасти 2-3. Необходимо модифицировать расчетные методики с целью оценки оптимальных размеров крыльев, закрылков и их шага. Применение крыльев с поворотными закрылками позволяет существенно повысить их аэродинамическую эффективность, в сравнении с поворотными крыльями не меняющейся формы, как в прототипе, и снизить мощность реверсивного электропривода одновременного поворота N крыльев (Роткин В., Соколовский Ю., Ажмухамедов И. РОТОР ДАРЬЕ И ОПТИМИЗИРОВАННЫЕ ВЕТРОТУРБИНЫ: СРАВНИТЕЛЬНЫЙ АНАЛИЗ. 111-121 с, №1 - 2020 "Прикаспийский журнал: управление и высокие технологии". 182 с.).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2023 |
|
RU2834741C2 |
| ВЕТРОГЕНЕРИРУЮЩЕЕ УСТРОЙСТВО | 2022 |
|
RU2789139C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2020 |
|
RU2778761C2 |
| ВЕТРОДВИГАТЕЛЬ | 2021 |
|
RU2765324C1 |
| ЭКОЛОГИЧНАЯ И ЭНЕРГОЭФФЕКТИВНАЯ ВЕТРОТУРБИНА НА ГОРИЗОНТАЛЬНОМ ВАЛУ | 2016 |
|
RU2692602C2 |
| КОНЦЕНТРАТОР ВОЗДУШНОГО ПОТОКА | 2021 |
|
RU2789140C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2014 |
|
RU2589569C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2016 |
|
RU2702814C2 |
| ВЕТРОЭЛЕКТРОСТАНЦИЯ | 2017 |
|
RU2697245C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2019 |
|
RU2759586C2 |
Изобретение относится к области ветроэнергетики и может быть использовано как источник электрической энергии. Ветрогенератор состоит из симметричных аэродинамических крыльев, закрепленных на осях, проходящих через средние точки хорд крыльев. Компьютер или микропроцессор управляет исполнительными механизмами установки угла атаки аэродинамических крыльев для различных скоростей воздушных потоков и движения самого устройства с использованием информации от комплекта датчиков. Установлены два комплекта по N симметричных аэродинамических крыльев с закрылками в кассетах на колесиках. Концы крыльев и закрылков в каждой кассете объединены соединительными планками. На оси контрольного крыла в каждой кассете установлен датчик положения. На оси контрольного закрылка в каждой кассете в качестве исполнительного механизма установки углов атаки применен реверсивный электропривод, обеспечивающий оптимальное положение углов атаки всех симметричных аэродинамических крыльев каждой кассеты, направленных в противоположные стороны. Каждая из двух кассет через шарнир и шток соединена с коленвалом и движется в прямоугольной обойме с внутренним профилем для колесиков кассет вперед-назад. К боковым сторонам прямоугольной обоймы перпендикулярно ее плоскости с подветренной стороны закреплены флюгерные аэродинамические крылья с выпуклостью внутрь прямоугольной обоймы. Посредине верхней и нижней сторон обоймы закреплены подшипники, через которые проходит коленвал. Положение прямоугольной обоймы в горизонтальной плоскости фиксируют верхний и нижний опорные подшипники, встроенные в базовую конструкцию ветрогенерирующего устройства. Коленвал, пройдя через нижний опорный подшипник, подсоединен через соединительную муфту к электроэнергетическому блоку. Техническим результатом является обеспечение оптимального управления углом атаки, повышения надежности конструкции, снижения экологических проблем. 3 ил.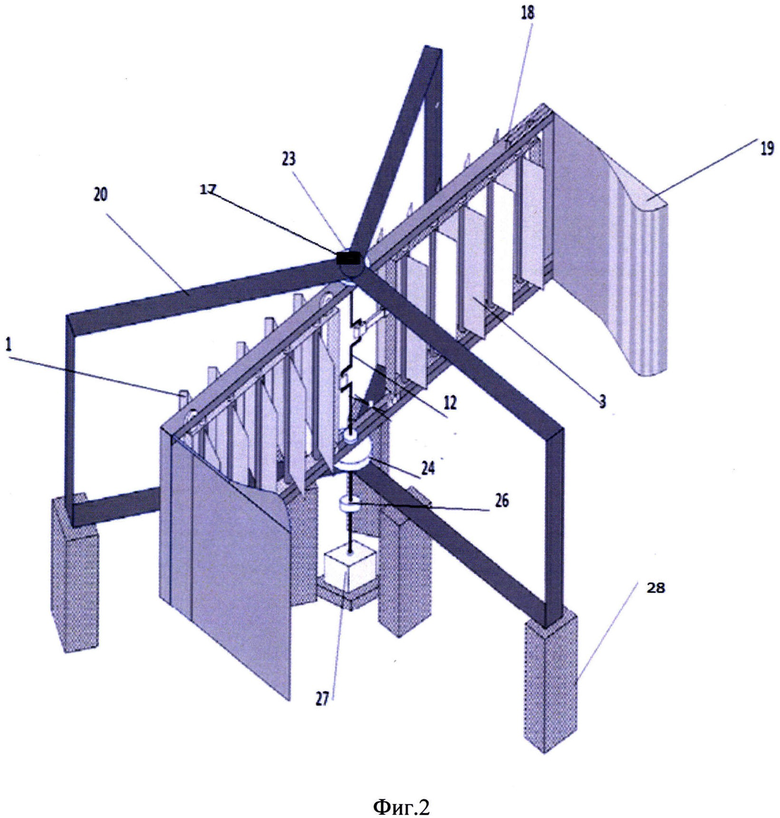
Ветрогенерирующее устройство состоит из цельных симметричных аэродинамических крыльев, закрепленных на осях, проходящих через средние точки хорд крыльев, имеет компьютер или микропроцессор, управляющий исполнительными механизмами установки угла атаки аэродинамических крыльев для различных скоростей воздушных потоков и движения самого устройства с использованием информации от комплекта датчиков, отличающееся тем, что установлены два комплекта по N симметричных аэродинамических крыльев с закрылками в кассетах на колесиках, причем концы крыльев и закрылков в каждой кассете объединены соединительными планками, на оси контрольного крыла в каждой кассете установлен датчик положения, а на оси контрольного закрылка в каждой кассете в качестве исполнительного механизма установки углов атаки применен реверсивный электропривод, обеспечивающий оптимальное положение углов атаки всех симметричных аэродинамических крыльев каждой кассеты, но направленных в противоположные стороны, причем каждая из двух кассет через шарнир и шток соединена с коленвалом и движется в прямоугольной обойме с внутренним профилем для колесиков кассет вперед-назад, к боковым сторонам прямоугольной обоймы перпендикулярно ее плоскости с подветренной стороны закреплены флюгерные аэродинамические крылья с выпуклостью внутрь прямоугольной обоймы, посредине верхней и нижней сторон последней закреплены подшипники, через которые проходит коленвал, положение прямоугольной обоймы в горизонтальной плоскости фиксируют верхний и нижний опорные подшипники, встроенные в базовую конструкцию ветрогенерирующего устройства, а коленвал, пройдя через нижний опорный подшипник, подсоединен через соединительную муфту к электроэнергетическому блоку.
| CN 101349243 A, 21.01.2009 | |||
| Ватерпасная рейка | 1955 |
|
SU104764A1 |
| EP 2957768 A1, 23.12.2015 | |||
| CN 205669456 U, 02.11.2016 | |||
| Ротор вертикально-осевой ветряной установки | 2019 |
|
RU2705531C1 |

