Изобретение относится к винтовому детандеру, содержащему корпус детандера с расположенной в нем камерой винтовых роторов, два расположенных в камере винтовых роторов и установленных в корпусе детандера с возможностью вращения вокруг соответствующих осей винтовых ротора, которые своими винтовыми контурами входят в зацепление друг с другом и взаимодействуют с соответственно граничащими с ними и частично охватывающими их стенными поверхностями, чтобы через расположенную в корпусе детандера камеру высокого давления принимать подведенную рабочую среду, прежде всего газообразную рабочую среду, и отдавать ее в области расположенной в камеры низкого давления, причем, прежде всего, газообразная рабочая среда с начальным объемом при высоком давлении заключается в образованную между винтовыми контурами и граничащими с ними стенными поверхностями рабочие камеры детандера и расширяется при низком давлении до конечного объема, и приводимый в действие с помощью винтовых роторов, прежде всего электрический, генератор.
Из публикации US 2020080559 А1 известна гидромашина, в частности винтовой детандер, содержащая корпус, два первых винтовых ротора, находящихся в зацеплении между собой и расположенных в первой камере корпуса, два вторых винтовых ротора, находящихся в зацеплении между собой и расположенных во второй камере корпуса, приводной модуль, первый золотник, установленный с возможностью перемещения относительно двух первых винтовых роторов, и второй золотник, установленный с возможностью перемещения относительно двух вторых винтовых роторов.
В подобных винтовых детандерах имеется проблема, состоящая в том, чтобы адаптировать определенное начальным объемом и конечным объемом объемное отношение к разным рабочим состояниям.
Для решения этой задачи предложен винтовой детандер, содержащий:
- корпус детандера с расположенной в нем камерой винтовых роторов,
- два расположенных в камере винтовых роторов и установленных в корпусе детандера с возможностью вращения вокруг соответствующих осей винтовых ротора, которые своими винтовыми контурами входят в зацепление друг с другом и взаимодействуют с соответственно граничащими с ними и частично охватывающими их стенными поверхностями, чтобы через расположенную в корпусе детандера камеру высокого давления принимать подведенную рабочую среду и отдавать ее в области расположенной в корпусе детандера камеры низкого давления, причем газообразная рабочая среда при высоком давлении заключается с начальным объемом в образованные между винтовыми контурами и граничащими с ними стенными поверхностями камеры расширения и расширяется при низком давлении до конечного объема,
- приводимый в действие с помощью винтовых роторов генератор,
- по меньшей мере один расположенный в золотниковом канале корпуса детандера и граничащий стенными поверхностями золотника с обоими винтовыми роторами управляющий золотник, который выполнен с возможностью передвижения в направлении перемещения параллельно осям винтового ротора и за счет этого выполнен с оказанием влияния на конечный объем и/или начальный объем, причем для передвижения управляющего золотника в различные положения предусмотрен привод золотника,
- устройство управления, выполненное с возможностью управления приводом соответствующего управляющего золотника для установки подходящего для расширения рабочей среды объемного отношения, образованного из конечного объема, деленного на начальный объем,
причем устройство управления выполнено таким образом, чтобы посредством соответствующих датчиков, расположенных со стороны высокого давления и со стороны низкого давления, регистрировать высокое давление и низкое давление, определять на их основании отношение высокого давления к низкому давлению и посредством управления соответствующим приводом золотника позиционировать соответствующий управляющий золотник в соответствии с возрастанием отношения высокого давления к низкому давлению выше по меньшей мере одного заданного граничного значения или уменьшением отношения высокого давления к низкому давлению ниже по меньшей мере одного заданного граничного значения.
Преимущество решения согласно изобретению усматривается в том, что таким образом объемное отношение винтового детандера может адаптироваться к различным условиям эксплуатации при применении такового, например, в контуре рабочей среды в замкнутом процессе.
Подобный винтовой детандер принципиально работает с передвигаемым в направлении перемещения управляющим золотником, которым являются настраиваемыми различные положения золотника и вместе с тем различные объемные отношения.
Альтернативно, преимущественным образом, предусмотрено, что винтовой детандер имеет два управляющих золотника, причем первый управляющий золотник выполнен с оказанием влияния на начальный объем, а второй управляющий золотник выполнен с оказанием влияния на конечный объем.
Примененный согласно изобретению детандер является, например, открытым детандером с подключенным внешним генератором или полугерметичным детандером с интегрированным генератором.
Как указано выше, в составе детандера предусмотрено устройство управления, которое управляет приводом золотника соответствующего управляющего золотника для установки подходящего для расширения рабочей среды объемного отношения, образованного из конечного объема, деленного на начальный объем.
Как указано выше, что устройство управления посредством расположенных соответственно со стороны высокого давления и со стороны низкого давления установки для расширения рабочей среды или детандера, например с помощью предназначенных для находящегося со стороны детандера подключения высокого давления и подключения низкого давления, датчиков регистрирует высокое давление и низкое давление и на этом основании определяет отношение давлений высокого давления к низкому давлению.
Уже при определении отношения давлений высокого давления к низкому давлению с помощью устройства управления являются реализуемыми достаточные адаптации положений золотника по меньшей мере одного управляющего золотника или обоих управляющих золотников.
Как указано выше, устройство управления посредством управления соответствующим приводом золотника позиционирует соответствующий управляющий золотник соответственно возрастанию выше или уменьшению ниже по меньшей мере одного заданного граничного значения для отношения давлений высокого давления к низкому давлению. Это означает, что уже при применении заданного граничного значения имеется возможность с помощью устройства управления передвигать управляющие золотники в различные положения.
Прежде всего, предусмотрено, что при уменьшении ниже по меньшей мере одного граничного значения устройство управления передвигает по меньшей мере один управляющий золотник в положение со сниженным объемным отношением конечного объема к начальному объему.
Кроме того, преимущественным образом, предусмотрено, что при возрастании выше по меньшей мере одного граничного значения устройство управления передвигает по меньшей мере один управляющий золотник в положение с большим объемным отношением конечного объема к начальному объему.
При этом в простейшем случае одно положение золотника соответствует большему, например максимальному, объемному отношению, а другое положение золотника меньшему, например пониженному, прежде всего минимальному, объемному отношению, причем положение золотника для большего объемного отношения применяется при значениях отношения давлений, которые находятся выше заданного граничного значения, а положение золотника для меньшего объемного отношения или даже для минимального отношения применяется при значениях отношения давлений, которые находятся ниже этого граничного значения.
Тем не менее, является еще более предпочтительным, если устройство управления позиционирует управляющий золотник соответственно превышенной или заниженной величине относительно нескольких граничных значений отношения давлений.
В этом случае имеется возможность того, чтобы устанавливать для отношения давлений первое граничное значение, при превышении которого устанавливается положение золотника для максимального объемного отношения, а при величине ниже которого устанавливается положение золотника для пониженного объемного отношения, причем между различными пониженными объемными отношениями тоже может осуществляться дифференциация за счет других граничных значений для отношения давлений, так что, например, по меньшей мере при одном другом граничном значении для отношения давлений возможна еще дифференциация между положением золотника для более высокого пониженного объемного отношения в противоположность положения золотника для более низкого пониженного объемного отношения.
В отношении других функций устройства управления являются мыслимыми самые разные возможности.
Так, одно простое решение предусматривает, что устройство управления передвигает соответствующий управляющий золотник в соответствующие предварительно определенным объемным отношениям положения золотника.
Ими могут быть две разные, предварительно определенные положения золотника или несколько предварительно определенных положений золотника.
Таким образом, при этом решении принимаются предварительно определенные, то есть заданные, положения золотника и затем поддерживаются с помощью устройства управления во взаимодействии с соответствующим приводом золотника.
Альтернативно этому предусмотрено, что устройство управления передвигает соответствующий управляющий золотник с регулировкой по положению, то есть может передвигать в любые положения золотника, которые являются реализуемыми винтовым детандером, так что в рамках конструктивных возможностей винтового детандера задано оптимальное использование его возможностей расширения.
В рамках решения согласно изобретению, прежде всего, предусмотрено, что устройство управления рассчитывает с учетом по меньшей мере одного или нескольких из параметров, таких как уровень давления при низком давлении, уровень давления при высоком давлении, температура газообразной среды при высоком давлении и при низком давлении, скорость вращения винтовых роторов, параметр потребляемой мощности газообразной рабочей среды, прежде всего хладагента, применение граничных значений винтового детандера, положения управляющих золотников.
Кроме того, в соответствующем изобретению решении по меньшей мере для одного управляющего золотника, преимущественным образом, предусмотрен блок регистрации положения.
Блок регистрации положения содержит, например, связанный с положениями по меньшей мере одного управляющего золотника элемент индикации положения, причем по меньшей мере один элемент индикации положения взаимодействует с детекторным элементом, и причем детекторный элемент связан с блоком обработки данных, который регистрирует положения элемента индикации положения.
При этом в простейшем случае предусмотрено, что по меньшей мере один элемент индикации положения выполнен с возможностью передвижения параллельно направлению перемещения по меньшей мере одного управляющего золотника вместе с ним, прежде всего жестко связан с этим управляющим золотником.
В случае двух управляющих золотников, преимущественным образом, предусмотрено, что блок регистрации положения обоих управляющих золотников содержит связанный с первым управляющим золотником первый элемент индикации положения и связанный со вторым управляющим золотником второй элемент индикации положения, и что оба элемента индикации положения взаимодействуют с общим детекторным элементом.
При этом в таком случае общий детекторный элемент с блоком обработки данных в состоянии регистрировать положения обоих элементов индикации положения.
Предпочтительное решение предусматривает, что детекторный элемент, вдоль которого является передвигаемым элемент индикации положения, простирается параллельно направлению перемещения по меньшей мере одного управляющего золотника.
Особенно в случае двух управляющих золотников предусмотрено, что детекторный элемент, вдоль которого при передвижении управляющих золотников являются передвигаемыми элементы индикации положения, простирается параллельно направлению перемещения первого и второго управляющего золотника.
В отношении расположения блока регистрации положения до сих пор не было приведено никаких, более подробных данных.
Так, предпочтительное решение предусматривает, что блок регистрации положения расположен в проходящем внутри корпуса детандера параллельно направлению перемещения детекторном канале.
Помимо этого, также предусмотрено, что в этом детекторном канале расположен соответствующий элемент индикации положения.
Особо выгодное решение предусматривает, что соответствующий элемент индикации положения взаимодействует с детекторным элементом бесконтактно.
Для регистрации положения по меньшей мере одного управляющего золотника, например, в том случае, если он приводится в действие приводом с ходовым винтом с помощью электродвигателя, являются также мыслимыми регистрация поворотных положений и/или оборотов электродвигателя при позиционировании управляющего золотника и определение на основании этого положения управляющего золотника.
В отношении конструктивного выполнения винтового детандера, прежде всего в случае двух управляющих золотников, до сих пор не было приведено никаких других подробностей.
Так, преимущественным образом, предусмотрено, что первый управляющий золотник и второй управляющий золотник расположены друг за другом в направлении их перемещения.
Помимо этого, рациональным образом, предусмотрено, что первый управляющий золотник и второй управляющий золотник имеют идентичный внешний контур.
Кроме того, предпочтительно предусмотрено, что первый управляющий золотник и второй управляющий золотник в объединенном положении являются позиционируемыми непосредственно с примыканием друг к другу и передвигаемыми вместе в направлении перемещения.
Помимо этого, предусмотрено, что первый управляющий золотник и второй управляющий золотник в разделенном положении являются позиционируемыми на расстоянии друг от друга с образованием промежуточного пространства.
В отношении выполнения соответствующего привода золотника для управляющего золотника во взаимосвязи с прежними изложениями до сих пор не было приведено никаких, более подробных данных.
Так, преимущественным образом, предусмотрено, что первый управляющий золотник жестко соединен с поршнем образующей первый привод золотника цилиндровой структуры для передвижения этого управляющего золотника.
Помимо этого, одно предпочтительное решение предусматривает, что второй управляющий золотник жестко соединен с поршнем образующей второй привод золотника цилиндровой структуры для передвижения второго управляющего золотника.
Альтернативно, для того, чтобы предусматривать в качестве привода золотника цилиндровые структуры, другое предпочтительное решение предусматривает в качестве привода золотника приводимый в действие с помощью двигателя, прежде всего электродвигателя, привод с ходовым винтом.
Рациональным образом, питание электродвигателя осуществляется, например, через предусмотренный для получения электрической энергии генератор или через вспомогательный генератор, который соединен с одним из винтовых роторов.
Является, однако, также мыслимым, что электродвигатель питается от сети, в которую вводится образованная электрическим генератором энергия.
Кроме того, изобретение относится к установке для получения электрической энергии из тепла, содержащей замкнутый процесс, в котором введенная в контур рабочая среда, исходя из конденсированного состояния, уплотняется, испаряется за счет подачи тепла, расширяется в детандерной установке и вслед за этим конденсируется за счет отвода тепла, причем для расширения рабочей среды детандерная установка имеет по меньшей мере один винтовой детандер по одному из предшествующих признаков.
Таким образом, предыдущее описание соответствующих изобретению решений содержит, прежде всего, пронумерованные ниже формы выполнения определенных различных комбинаций признаков:
1. Винтовой детандер (10), содержащий корпус (12) детандера с расположенной в нем камерой (18) винтовых роторов, два расположенных в камере (18) винтовых роторов и установленных в корпусе (12) детандера с возможностью вращения вокруг соответственно оси (22, 24) винтового ротора винтовых ротора (26, 28), которые своими винтовыми контурами (32, 34) входят в зацепление друг с другом и взаимодействуют с соответственно граничащими с ними и частично охватывающими их стенными поверхностями (36, 38), чтобы через расположенную в корпусе (12) детандера камеру (44) высокого давления принимать подведенную рабочую среду и отдавать ее в области расположенной в корпусе (12) детандера камеры (42) низкого давления, причем газообразная рабочая среда при высоком давлении (РН) заключается с начальным объемом в образованные между винтовыми контурами (32, 34) и граничащими с ними стенными поверхностями (36, 38) камеры расширения и расширяется при низком давлении (PN) до конечного объема, и приводимый в действие с помощью винтовых роторов (26, 28) генератор (30), причем винтовой детандер (10) имеет по меньшей мере один расположенный в золотниковом канале (56)корпуса (12) детандера и граничащий стенными поверхностями (62, 64) золотника с обоими винтовыми роторами (26, 28) управляющий золотник (52, 52', 54), который выполнен с возможностью передвижения в направлении (72) перемещения параллельно осям (22, 24) винтового ротора и за счет этого выполнен с оказанием влияния на конечный объем и/или начальный объем, и что предусмотрен привод (112, 132, 113) золотника для передвижения управляющего золотника (52, 52', 54) в различные положения золотника.
2. Винтовой детандер по форме 1 выполнения, причем винтовой детандер (10) имеет два управляющих золотника (52, 54), причем первый управляющий золотник (52) выполнен с оказанием влияния на начальный объем, а второй управляющий золотник (54) выполнен с оказанием влияния на конечный объем.
3. Винтовой детандер по форме 1 или 2 выполнения, причем предусмотрено устройство (218) управления, которое управляет приводом (112, 132) золотника соответствующего управляющего золотника (52, 52', 54) для установки подходящего для расширения рабочей среды объемного отношения (Vi), образованного из конечного объема, деленного на начальный объем.
4. Винтовой детандер по форме 3 выполнения, причем устройство (218) управления посредством расположенных соответственно со стороны высокого давления и со стороны низкого давления датчиков (SPH, SPN) регистрирует высокое давление (РН) и низкое давление (PN) и на основании их определяет отношение (PV) давлений высокого давления (РН) к низкому давлению (PN).
5. Винтовой детандер по форме 3 или 4 выполнения, причем устройство (218) управления посредством управления соответствующим приводом (112, 132, 113) золотника позиционирует соответствующий управляющий золотник (52, 52', 54) соответственно возрастанию выше или уменьшению ниже по меньшей мере одного заданного граничного значения (G1) для отношения (PV) давлений высокого давления (РН) к низкому давлению (PN).
6. Винтовой детандер по форме 5 выполнения, причем при уменьшении ниже по меньшей мере одного граничного значения (G1) устройство (218) управления передвигает по меньшей мере один управляющий золотник (52, 52', 54) в положение с меньшим объемным отношением (V1) конечного объема к начальному объему.
7. Винтовой детандер по форме 5 или 6 выполнения, причем при возрастании выше по меньшей мере одного граничного значения (G1) устройство (218) управления передвигает по меньшей мере один управляющий золотник (52, 52', 54) в положение с большим объемным отношением (Vi) конечного объема к начальному объему.
8. Винтовой детандер по одной из форм 5-7 выполнения, причем устройство (218) управления позиционирует управляющий золотник (52, 52', 54) соответственно возрастанию выше или уменьшению ниже нескольких граничных значений (G1, Gw) для отношения (PV) давлений.
9. Винтовой детандер по одной из предшествующих форм выполнения, причем устройство (218) управления передвигает соответствующий управляющий золотник (52, 52', 54) в соответствующие предварительно определенным объемным отношениям (Vi) положения золотника.
10. Винтовой детандер по одной из предшествующих форм выполнения, причем устройство (218) управления позиционирует соответствующий управляющий золотник (52, 52', 54) с регулировкой по положению.
11. Винтовой детандер по одной из форм 3-10 выполнения, причем устройство (218) управления рассчитывает с учетом по меньшей мере одного или нескольких из параметров, таких как уровень (PN) давления при низком давлении, уровень (РН) давления при высоком давлении, температура газообразной рабочей среды при высоком давлении (РН) и при низком давлении (PN), скорость вращения винтовых роторов (26, 28), потребляемая мощность генератора (30), параметры газообразной рабочей среды, прежде всего хладагента, и примененные граничные значения винтового детандера (10), положения управляющих золотников (52, 52', 54).
12. Винтовой детандер по одной из предшествующих форм выполнения, причем по меньшей мере для одного управляющего золотника (52, 52', 54) предусмотрен блок (152, 152', 152'') регистрации положения.
13. Винтовой детандер по форме 12 выполнения, причем блок (152) регистрации положения имеет связанный с положением по меньшей мере одного управляющего золотника (52, 52', 54) элемент (156, 156', 156'', 158) индикации положения, причем по меньшей мере один элемент (156, 156', 156'', 158) индикации положения взаимодействует с детекторным элементом (154), и причем детекторный элемент (154) связан с блоком (192, 192', 192'') обработки данных, который регистрирует положения элемента (156, 156', 156'', 158) индикации положения.
14. Винтовой детандер по форме 12 или 13 выполнения, причем по меньшей мере один элемент (156, 156', 158) индикации положения выполнен с возможностью передвижения параллельно направлению (72) перемещения по меньшей мере одного управляющего золотника (52, 52', 54) вместе с ним.
15. Винтовой детандер по одной из форм 12-14 выполнения, причем для обоих управляющих золотников (52, 54) предусмотрен один блок (152) регистрации положения, который содержит связанный с первым управляющим золотником (52) первый элемент (156) индикации положения и связанный со вторым управляющим золотником (54) второй элемент (158) индикации положения, и причем оба элемента (156, 158) индикации положения взаимодействуют с общим детекторным элементом (154).
16. Винтовой детандер по одной из форм 12-15 выполнения, причем детекторный элемент (154), вдоль которого является передвигаемым элемент (156, 158) индикации положения, простирается параллельно направлению (72) перемещения по меньшей мере одного управляющего золотника (52, 54).
17. Винтовой детандер по форме 15 или 16 выполнения, причем детекторный элемент (154), вдоль которого при передвижении управляющих золотников (52, 52', 54) являются передвигаемыми элементы (156, 156', 158) индикации положения, простирается параллельно направлению (72) перемещения первого и второго управляющего золотника (52, 54).
18. Винтовой детандер по одной из форм 12-17 выполнения, причем блок (152, 152') регистрации положения расположен в проходящем внутри корпуса (12) детандера параллельно направлению (72) перемещения детекторном канале (216).
19. Винтовой детандер по одной из форм 12-18 выполнения, причем соответствующий элемент (156, 156', 158) индикации положения расположен в детекторном канале (216).
20. Винтовой детандер по одной из предшествующих форм выполнения, причем соответствующий элемент (156, 156', 156'', 158) индикации положения взаимодействует с детекторным элементом (154) бесконтактно.
21. Винтовой детандер по одной из предшествующих форм выполнения, причем первый управляющий золотник (52) и второй управляющий золотник (54) расположены находящимися друг за другом в направлении (72) их перемещения.
22. Винтовой детандер по форме 21 выполнения, причем первый управляющий золотник (52) и второй управляющий золотник (54) имеют идентичный внешний контур.
23. Винтовой детандер по форме 21 или 22 выполнения, причем первый управляющий золотник (52) и второй управляющий золотник (54) в объединенном положении являются позиционируемыми непосредственно с примыканием друг к другу и передвигаемыми вместе в направлении (72) перемещения.
24. Винтовой детандер по одной из форм 21-23 выполнения, причем первый и второй управляющие золотники (52, 54) в разделенном положении являются позиционируемыми на расстоянии друг от друга с образованием промежуточного пространства.
25. Винтовой детандер по одной из предшествующих форм выполнения, причем первый управляющий золотник (52) жестко соединен с поршнем (116) образующей первый привод золотника цилиндровой структуры (112) для передвижения первого управляющего золотника (52).
26. Винтовой детандер по одной из предшествующих форм выполнения, причем второй управляющий золотник (54) жестко соединен с поршнем (136) образующей второй привод золотника цилиндровой структуры (132) для передвижения второго управляющего золотника (54).
27. Винтовой детандер по одной из форм 1-24 выполнения, причем по меньшей мере один управляющий золотник (52') приводится в действие посредством привода (113) с ходовым винтом.
28. Винтовой детандер по форме 27 выполнения, причем привод (113) с ходовым винтом приводится в действие с помощью электрического приводного двигателя (115).
29. Установка для получения электрической энергии из тепла, содержащая замкнутый процесс, в котором введенная в контур (240) рабочая среда, исходя из конденсированного состояния, уплотняется, испаряется за счет подачи тепла, расширяется в детандерной установке (260) и вслед за этим конденсируется за счет отвода тепла, причем для расширения рабочей среды детандерная установка (260) имеет по меньшей мере один винтовой детандер (10) по одной из предшествующих форм выполнения.
Другие признаки и преимущества изобретения являются предметом последующего описания, а также графического изображения некоторых примеров выполнения.
На чертеже показано:
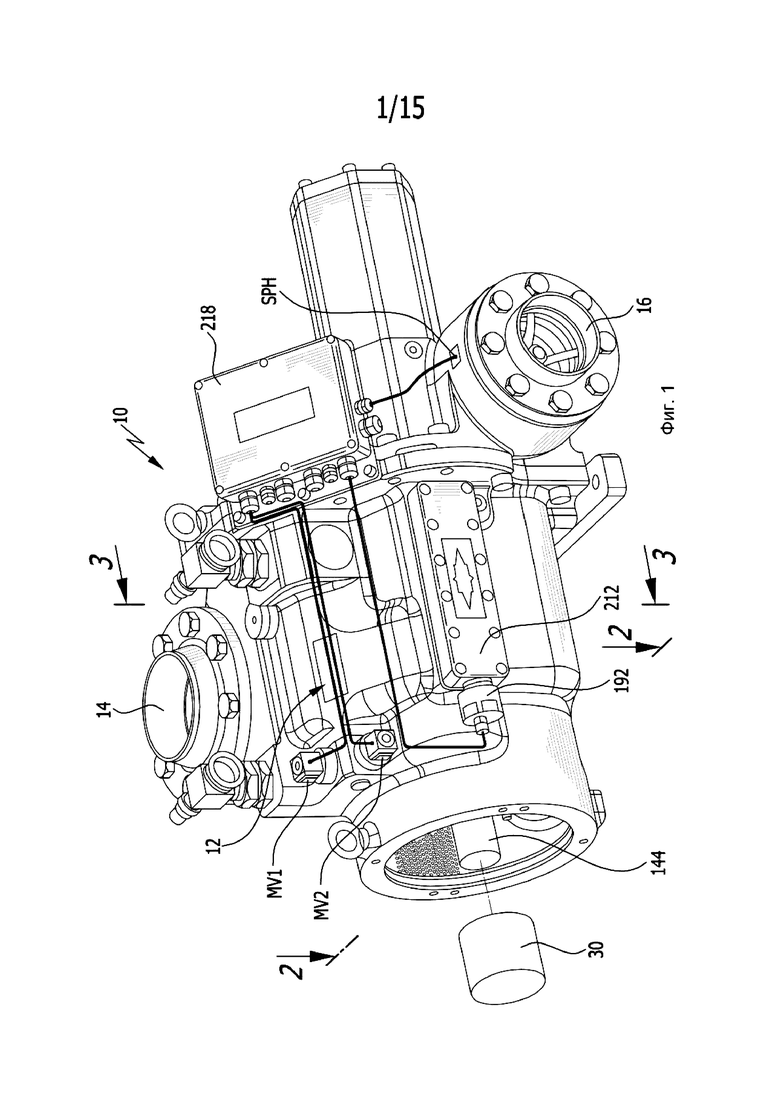
Фиг. 1 вид на первый пример выполнения соответствующего изобретению винтового детандера в перспективе,
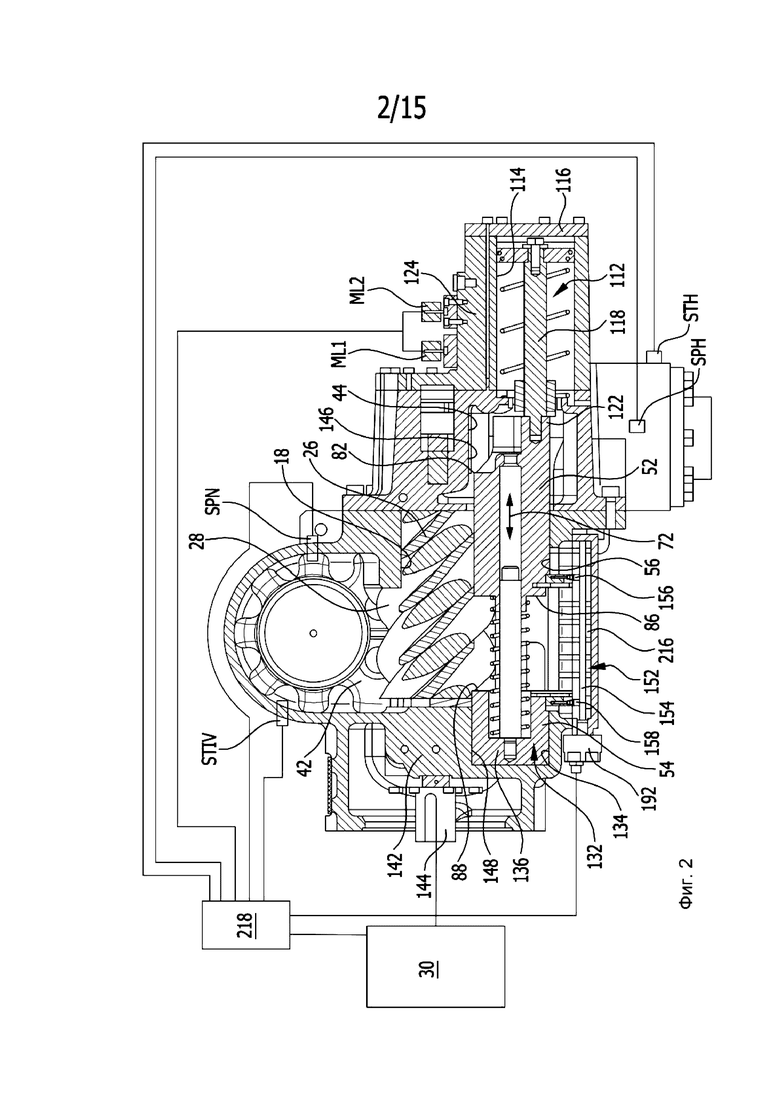
Фиг. 2 разрез вдоль линии 2-2 на фиг. 1,
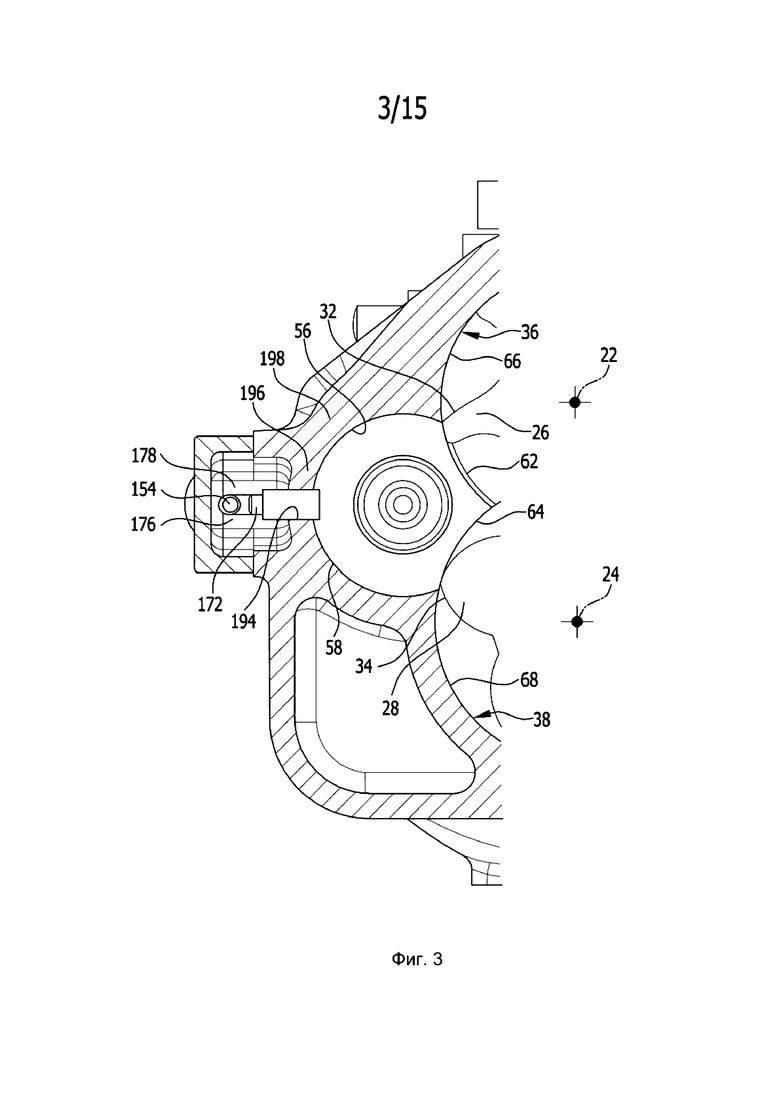
Фиг. 3 разрез вдоль линии 3-3 в области блока регистрации положения,
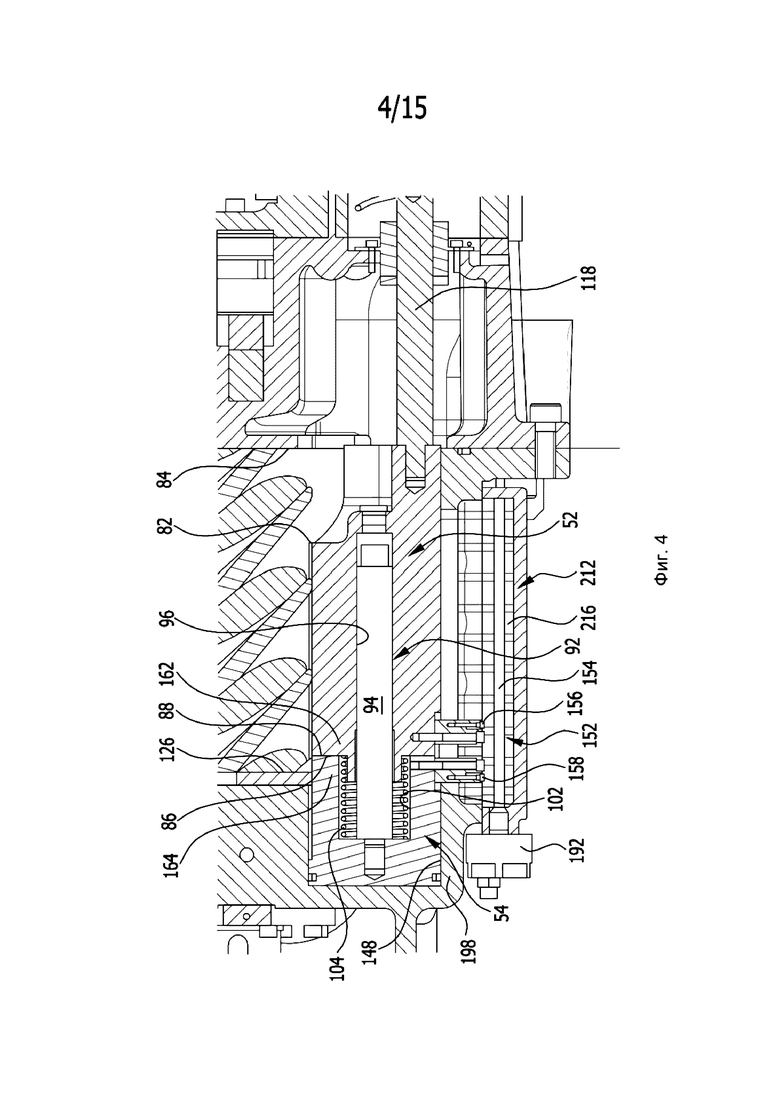
Фиг. 4 увеличенный разрез аналогично фиг. 2 в области блока регистрации положения и управляющих золотников при максимальной производительности и наименьшем объемном отношении,
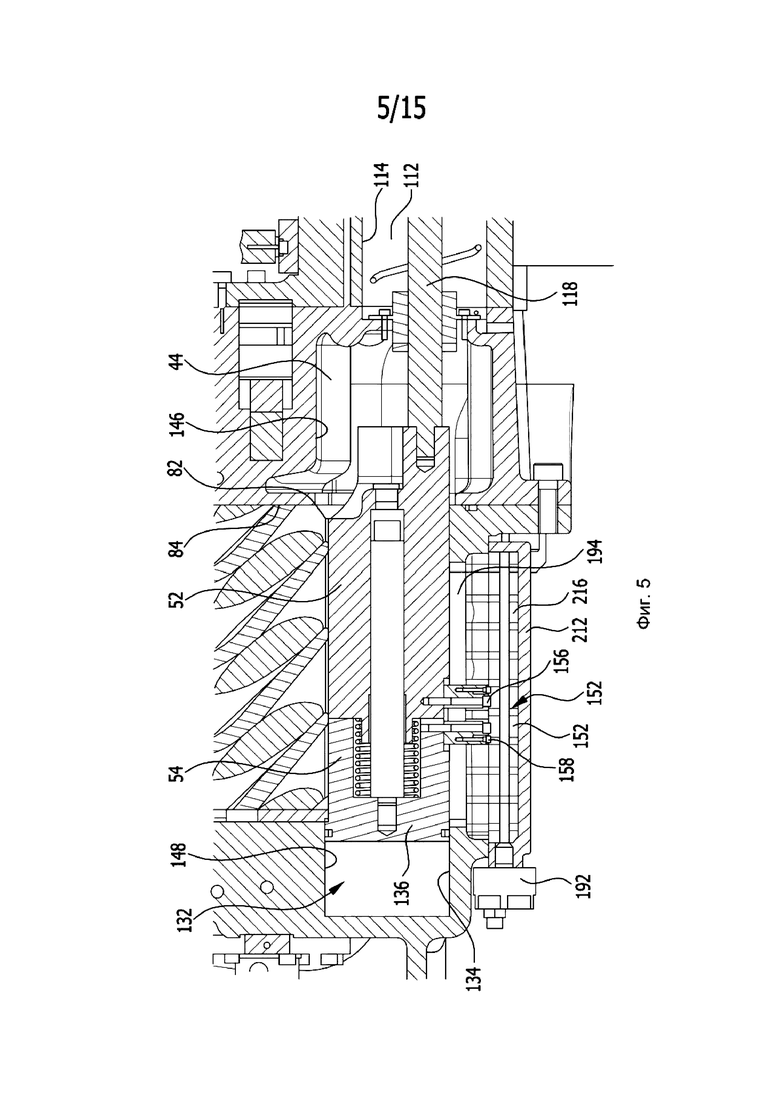
Фиг. 5 изображение аналогично фиг. 4 при максимальном объеме подачи и наибольшем объемном отношении,
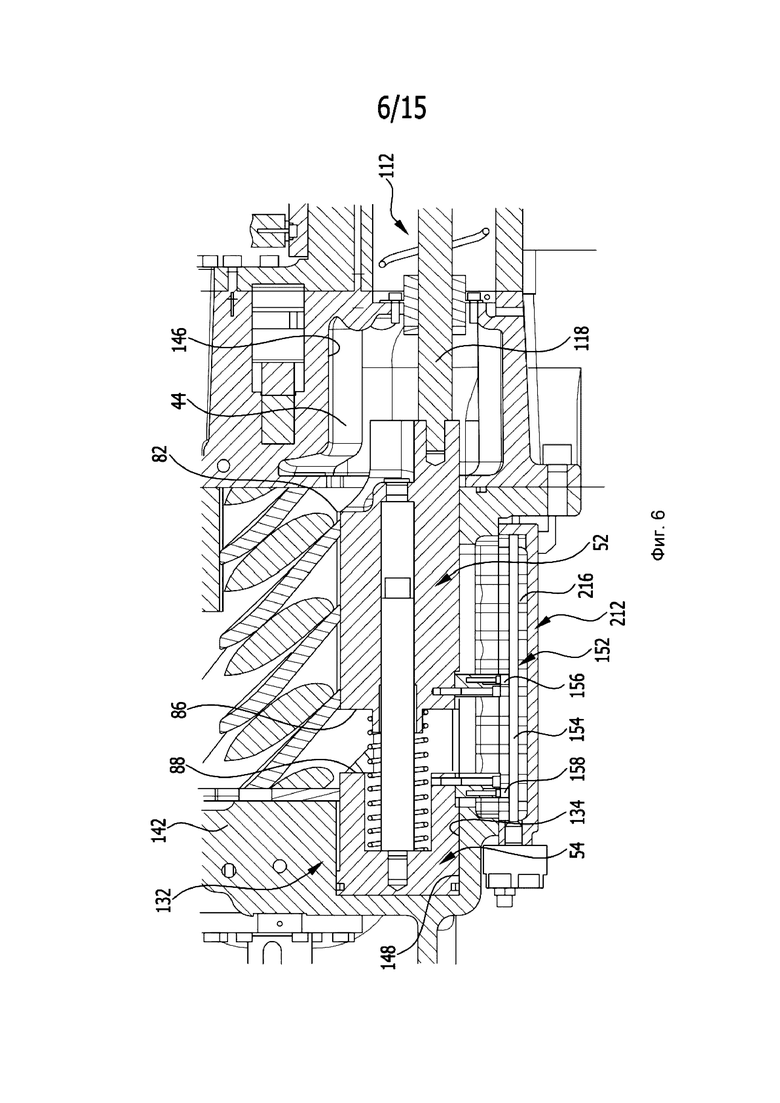
Фиг. 6 изображение аналогично фиг. 4 приблизительно при трех четвертях производительности,
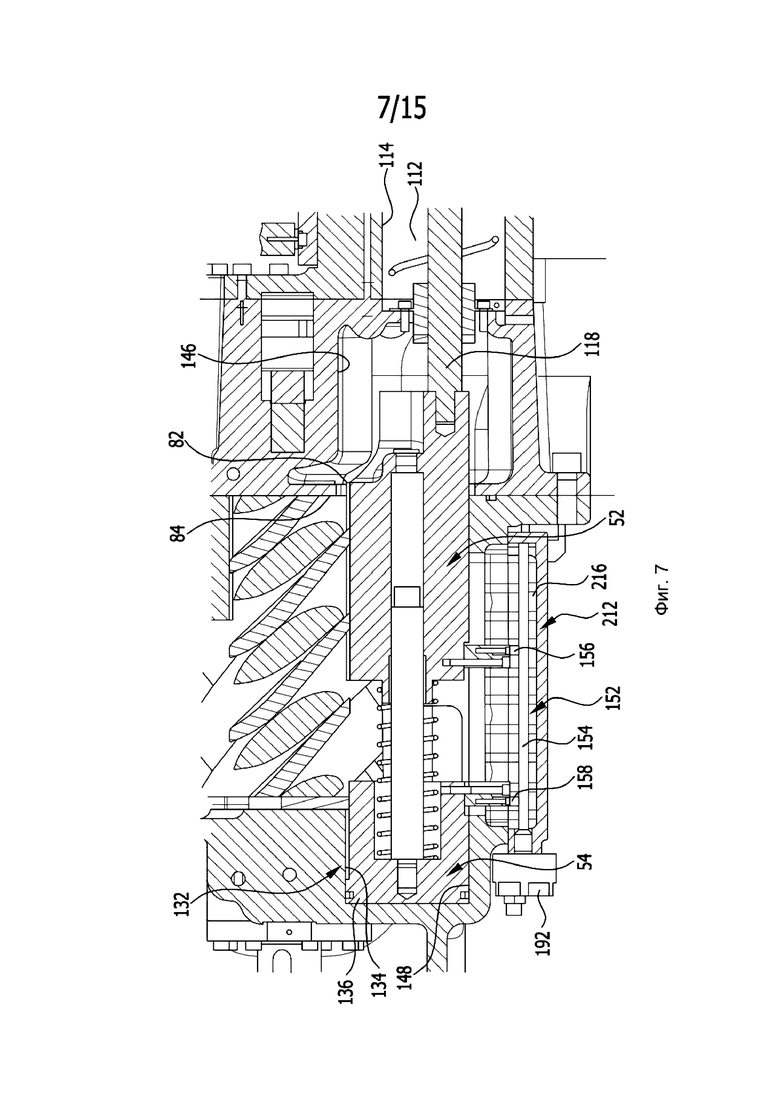
Фиг. 7 изображение аналогично фиг. 4 приблизительно при половинной производительности,
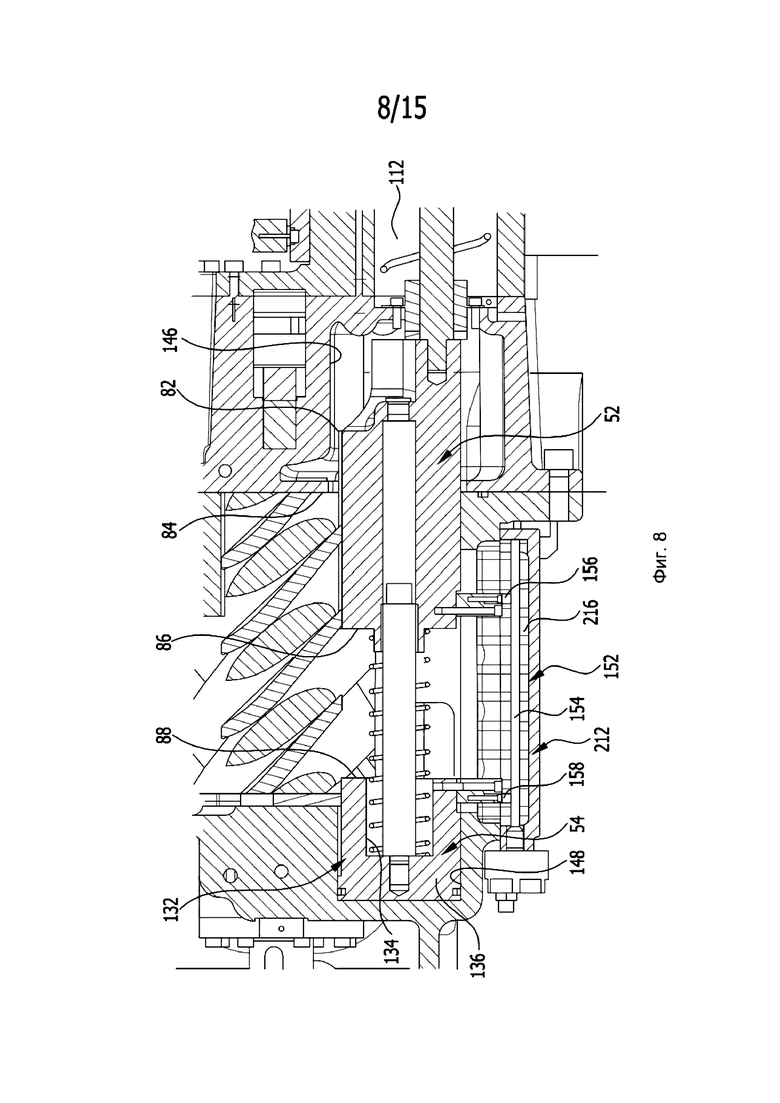
Фиг. 8 изображение аналогично фиг. 4 приблизительно при одной четверти производительности,
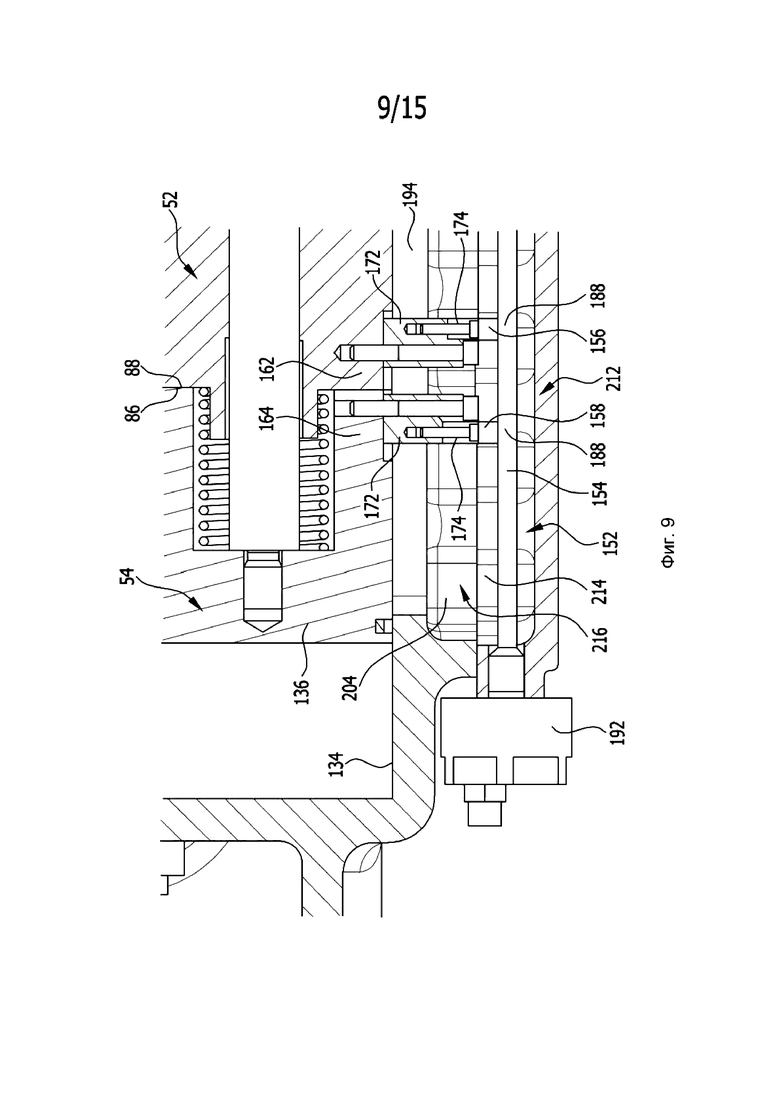
Фиг. 9 увеличенное изображение блока регистрации положения и элементов индикации положения в сочетании с управляющим золотником,
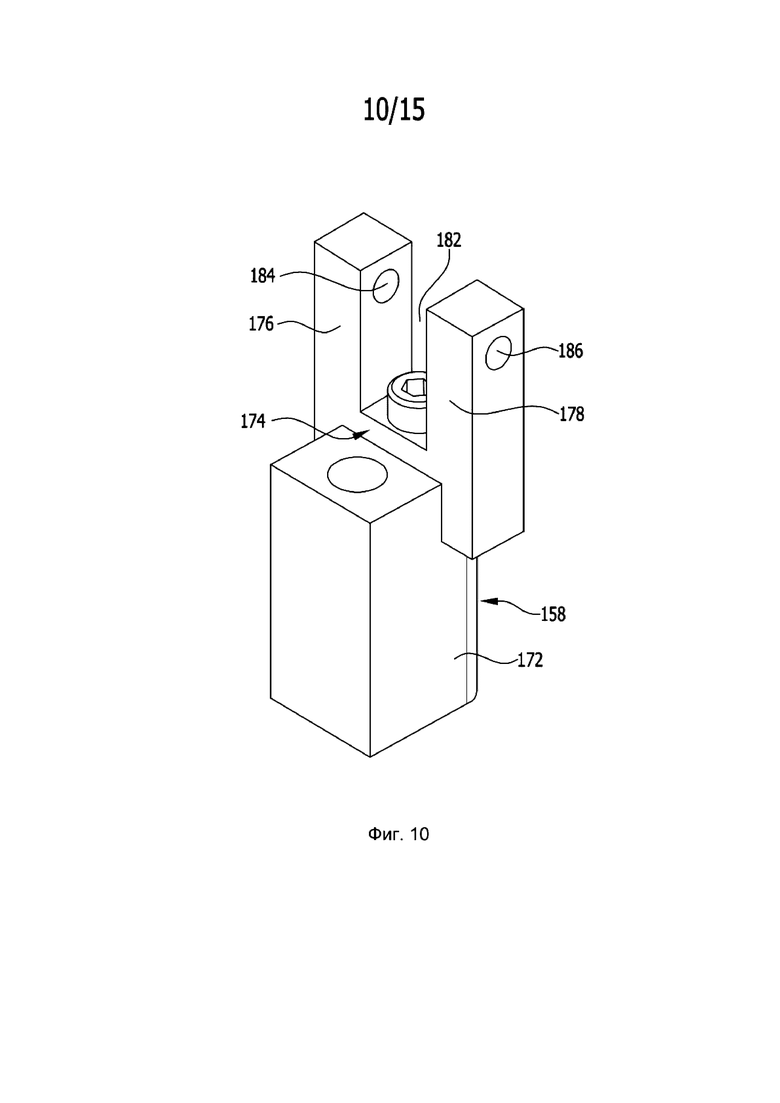
Фиг. 10 увеличенное изображение элемента индикации положения блока регистрации положения в перспективе,
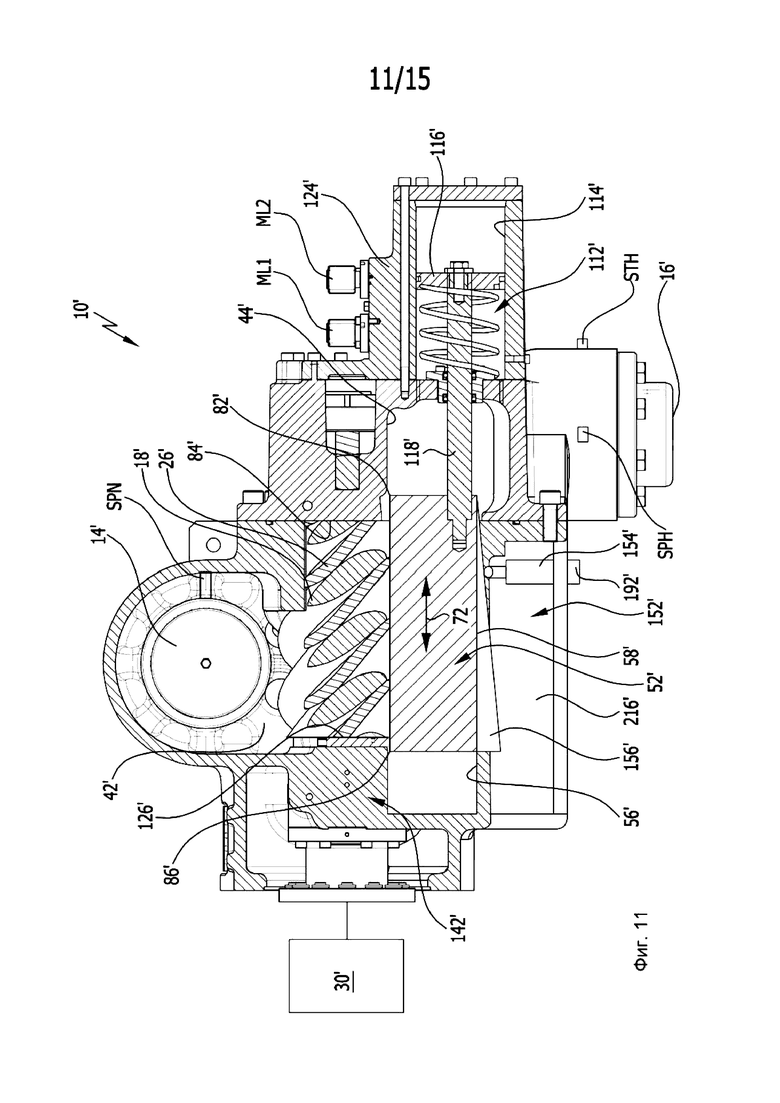
Фиг. 11 схематическое изображение второго примера выполнения соответствующего изобретению винтового детандера только с одним управляющим золотником аналогично фиг. 5 при наибольшем объемном отношении и наибольшей производительности,
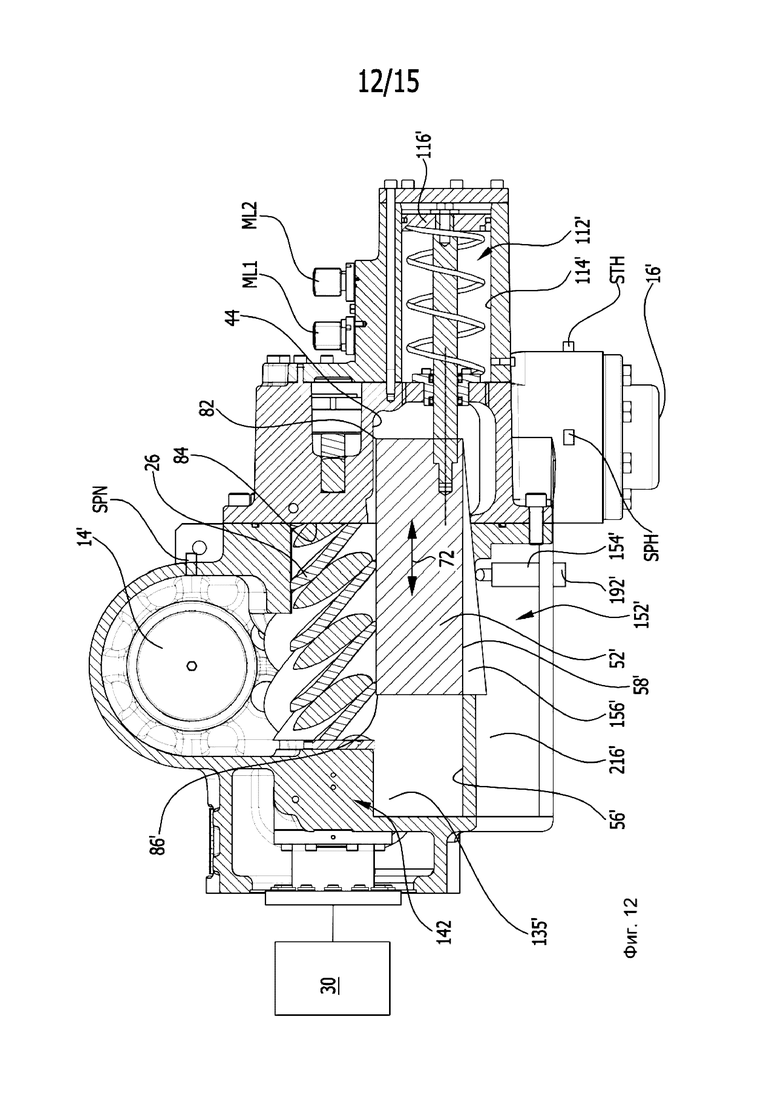
Фиг. 12 изображение аналогично фиг. 8 при пониженном объемном отношении и наименьшей производительности,
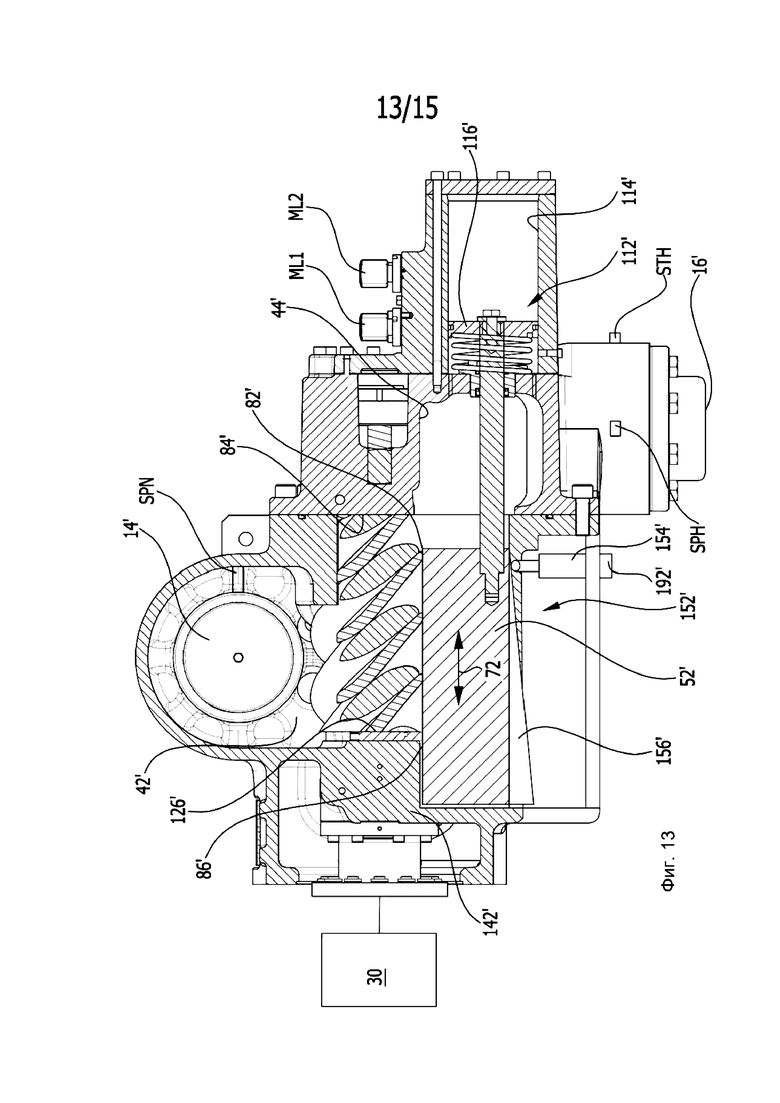
Фиг. 13 изображение аналогично фиг. 4 при наименьшем объемном отношении и наибольшей производительности,
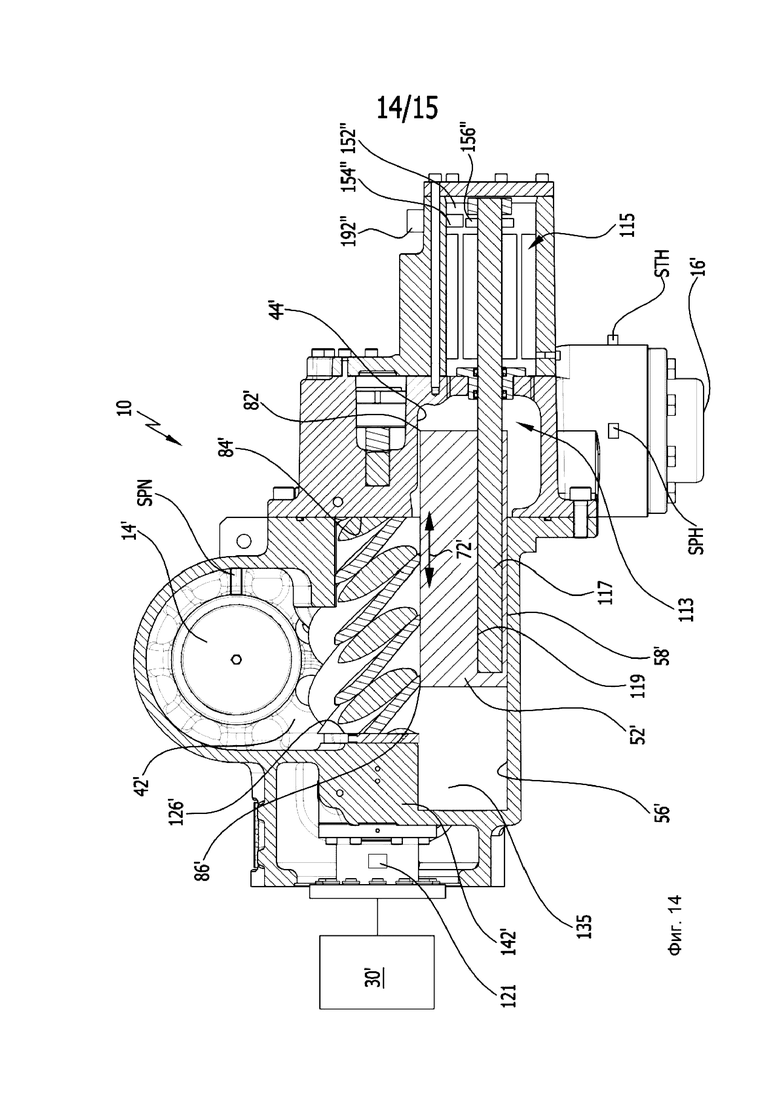
Фиг. 14 схематическое изображение третьего примера выполнения соответствующего изобретению винтового детандера аналогично фиг. 11, и
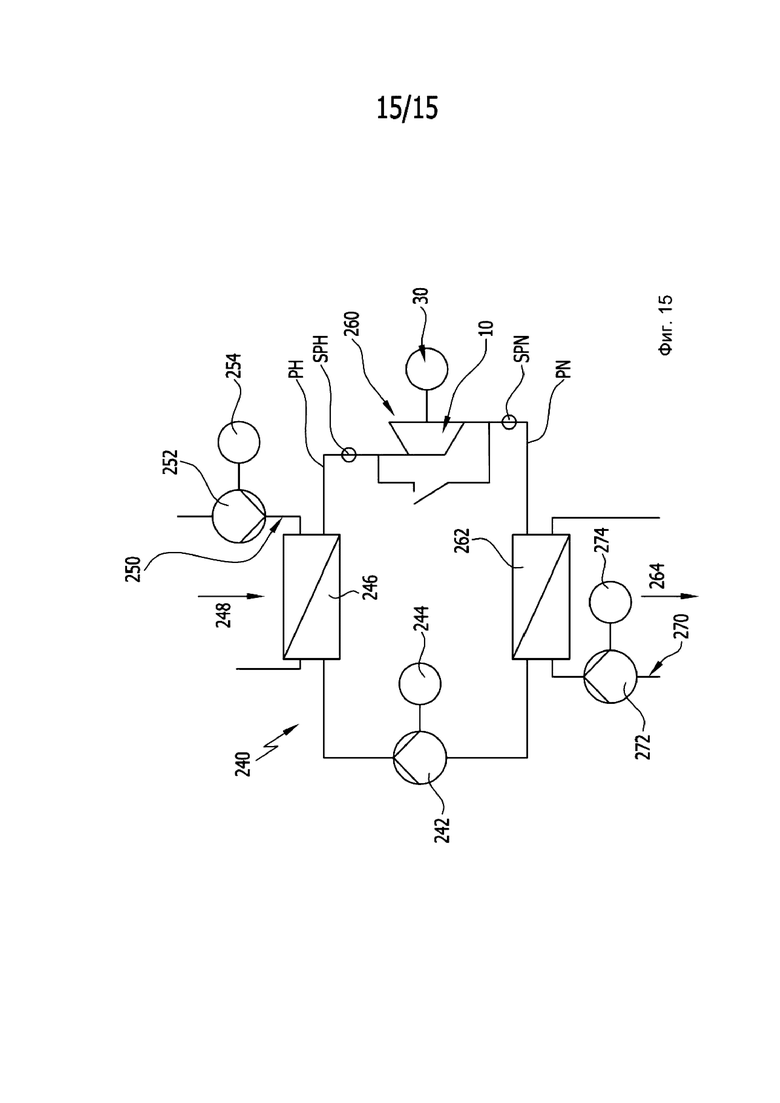
Фиг. 15 схематическое изображение установки для получения электрической энергии из тепла с замкнутым процессом с винтовым детандером согласно изобретению.
Изображенный на фиг. 1 пример выполнения соответствующего изобретению винтового детандера 10 содержит обозначенный в целом ссылочным обозначением 12 корпус детандера, который имеет выходное подключение 14, через которое выступает расширенная газообразная среда, прежде всего хладагент, и входное подключение 16, через которое поступает находящаяся под высоким давлением газообразная среда, прежде всего хладагент.
Как изображено на фиг. 2 и 3, в камере 18 винтовых роторов корпуса 12 детандера предусмотрено два соответственно вращаемых вокруг оси 22, 24 винтового ротора и связанных с генератором 30 винтовых ротора 26, 28, которые своими винтовыми контурами 32 и 34 входят в зацепление друг с другом и взаимодействуют с граничащими с ними по периферии стенными поверхностями 36 или же 38 камеры 18 винтовых роторов, чтобы принимать в граничащую с винтовыми контурами 32, 34 камеру 44 высокого давления поданную газообразную среду, сжимать ее и отдавать при низком давлении в камеру 42 низкого давления в корпусе 12 детандера.
При этом газообразная среда, прежде всего хладагент, с начальным объемом при высоком давлении заключается в образованную между винтовыми контурами 32, 34 и граничащими с ними стенными поверхностями 36, 38 рабочие камеры детандера и расширяется при низком давлении до конечного объема.
Для адаптации винтового детандера 10, например, к требующимся в расширительном контуре условиям эксплуатации осуществляется адаптация рабочего состояния винтового детандера 10, во-первых, относительно объемного отношения, которое дает отношение между максимальным заключенным начальным объемом и выданным конечным объемом, и, во-вторых, относительно производительности детандера, которая дает долю фактически расширенного винтовым детандером объемного потока по отношению к максимально расширяемому с помощью винтового детандера 10 объемному потоку.
Для адаптации рабочего состояния в первом, изображенном на фиг. 2-8 примере выполнения первый управляющий золотник 52 и второй управляющий золотник 54 расположены находящимися друг за другом в предусмотренном в корпусе 12 детандера золотниковом канале 56, причем золотниковый канал 56 проходит параллельно осям 22, 24 винтового ротора и направляет первый управляющий золотник 52 и второй управляющий золотник 54 в области их, не граничащей с винтовыми роторами 26, 28 направляющей окружной поверхности 58.
Первый управляющий золотник 52 обращен к камере 44 высокого давления и, таким образом, расположен со стороны высокого давления, а второй управляющий золотник 54 расположен по отношению к первому управляющему золотнику 52 со стороны низкого давления.
Каждый из обоих управляющих золотников 52 и 54 имеет, помимо этого, еще граничащую с винтовым ротором 26 стенную поверхность 62 золотника и граничащую с винтовым ротором 28 стенную поверхность 64 золотника, которые представляют собой частичные поверхности стенных поверхностей 36 и 38, и образованные корпусом 12 детандера стенные поверхности 66 и 68 корпуса, которые тоже представляют собой частичные поверхности стенных поверхностей 36 и 38, и стенные поверхности корпуса дополняют стенные поверхности 36 и 38, которые вместе с винтовыми контурами 32 и 34 вносят свой вклад в образование рабочих камер детандера.
Как изображено на фиг. 2, а также 4-8, первый управляющий золотник 52 и второй управляющий золотник 54 образованы так, что они ввиду того, что они образуют стенные поверхности 62 и 64 золотника, а также направляющую окружную поверхность 58, являются идентичными и, таким образом, они могут направляться с возможностью перемещения в золотниковом канале 56 корпуса 12 детандера в проходящем параллельно осям 22, 24 винтового ротора направлении 72 перемещения.
При этом первый управляющий золотник 52 образует обращенную к камере 44 высокого давления, устанавливающую начальный объем рабочих камер детандера впускную кромку 82, которая за счет перемещения первого управляющего золотника 52 является перемещаемой в направлении 72 перемещения и за счет ее положения по отношению к находящейся со стороны высокого давления замыкающей поверхности 84 камеры 18 винтовых роторов участвует в определении начального объема образованных рабочих камер детандера и, следовательно, объемного отношения.
Как изображено на фиг. 2 и 4-8, первый управляющий золотник 52 и второй управляющий золотник 54 имеют обращенные друг к другу торцевые поверхности 86 и 88, которыми они, как изображено, например, на фиг. 4 и фиг. 5, являются прилагаемыми друг к другу так, что стенные поверхности 62 и 64 золотника первого управляющего золотника 52 и второго управляющего золотника 54 переходят друг в друга.
Помимо этого, первый управляющий золотник 52 и второй управляющий золотник 54 дополнительно к золотниковому каналу 56 направляются относительно друг друга с помощью телескопической направляющей 92, которая имеет внутренний направляющий элемент 94 и направляющее приемное гнездо 96, причем направляющее приемное гнездо 96 предусмотрено в первом управляющем золотнике 52, а направляющий элемент 94 удерживается во втором управляющем золотнике 54 и выступает за его торцевую поверхность 88, так что он может внедряться в направляющее приемное гнездо 96 в первом управляющем золотнике 52.
Помимо этого, в окружающей направляющий элемент 94 внутренней камере 102 второго управляющего золотника 54, преимущественным образом, предусмотрена еще пружина 104 сжатия, которая служит для того, чтобы нагружать первый управляющий золотник 52 относительно второго управляющего золотника 54 так, чтобы торцевые поверхности 86 и 88 были передвигаемыми в стороны друг от друга.
Как изображено на фиг. 2, для перемещения первого управляющего золотника 52 в качестве первого привода золотника предусмотрена цилиндровая структура 112, которая содержит цилиндрическую камеру 114 и поршень 116, причем поршень 116 соединен с поршневым штоком 118, который выполняет соединение с первым управляющим золотником 52, а именно, например, с выступом 122 первого управляющего золотника 52, который расположен, например, на находящейся напротив торцевой поверхности 86 стороне такового.
Помимо этого, цилиндровая структура 112 находится, прежде всего, на находящейся напротив второго управляющего золотника 54 стороне первого управляющего золотника 52, преимущественным образом на находящемся со стороны высокого давления участке 124 корпуса 12 детандера, который расположен вслед за золотниковым каналом 56 и вслед за камерой 44 высокого давления и, таким образом, на находящейся напротив камеры 42 низкого давления стороне корпуса 12 детандера.
Второй управляющий золотник 54 является перемещаемым с помощью образующей второй привод золотника цилиндровой структуры 132, которая содержит передвигаемый в цилиндрической камере 134 поршень 136, причем цилиндрическая камера 134 простирается, прежде всего, в продолжение золотникового канала 56 на находящемся со стороны низкого давления участке 142 корпуса, на котором расположены находящиеся со стороны привода подшипниковые узлы для винтовых роторов 26 и 28, которые выполнены с возможностью приведения в движение, например, через приводной вал 144.
Поршень 136, прежде всего, выполнен монолитно на втором управляющем золотнике 54 и имеет поршневую поверхность, которая соответствует, по меньшей мере, площади поперечного сечения второго управляющего золотника 54.
Находящийся со стороны низкого давления участок 142 корпуса, на котором размещена цилиндрическая камера 134 цилиндровой структуры 132 для передвижения второго управляющего золотника 54, находится в области корпуса 12 детандера, которая расположена напротив находящегося со стороны высокого давления участка 124 корпуса для размещения цилиндрической камеры 114 цилиндровой структуры 112.
Цилиндровые структуры 112 и 132 выполнены с возможностью приведения в действие, например, с помощью находящегося под давлением масла, которое и так уже имеется в детандере для смазывания винтовых роторов 26, 28.
Помимо этого, в подобных цилиндровых структурах являются настраиваемыми также различные положения поршня, как это описано, например, в ЕР 1 072 796 А1, на что при этом делается ссылка.
Первый управляющий золотник 52 и второй управляющий золотник 54 могут сдвигаться вместе с помощью цилиндровых структур 112 и 132 настолько, что в объединенном положении торцевые поверхности 86 и 88 прилегают друг к другу, и оба управляющих золотника 52, 54 могут также передвигаться в объединенном положении вместе как единый управляющий золотник, который простирается от находящейся со стороны низкого давления замыкающей поверхности 126 в направлении находящейся со стороны высокого давления замыкающей поверхности 84 и впускная кромка 82 которого принимает участие в установлении объемного отношения, причем, как изображено на фиг.4, в этом объединенном положении винтовой детандер 10 всегда выдает максимальный объемный поток.
В зависимости от положения впускной кромки 82 относительно замыкающей поверхности 84 может адаптироваться объемное отношение, которое при становящемся все меньше расстоянии от впускной кромки 82 до замыкающей поверхности 84 возрастает и достигает своего максимального значения тогда, когда впускная кромка 82 имеет требующееся для минимизации начального объема наименьшее расстояние до замыкающей поверхности 84, как это изображено, например, на фиг. 5.
Если теперь производительность детандера, то есть выдаваемый фактически объемный поток, необходимо дополнительно варьировать, то, как это изображено, например, на фиг.6, за счет движение управляющих золотников 52 и 54 друг от друга в разделенное положение происходит отделение торцевых поверхностей 86 и 88. В разделенном положении второй управляющий золотник 54 является недействующим, и, таким образом, в разделенном положении конечный объем определяется положением торцевой поверхности 86 первого управляющего золотника 52.
До тех пор, пока впускная кромка 82 не находится в положении, в котором она задает минимально возможный начальный объем, отношение конечного объема, заданного торцевой поверхностью 86, к начальному объему, заданному впускной кромкой 82, является все же неварьируемым.
Если же первый управляющий золотник 52 как это изображено на фиг. 7, смещается в направлении камеры 44 высокого давления настолько, что впускная кромка 82 имеет минимальное расстояние до замыкающей поверхности 84 или даже смещается за ее пределы в охваченную камерой 44 высокого давления входную камеру 146 для первого управляющего золотника 52, то возможно варьирование конечного объема за счет положения торцевой поверхности 86 без изменения начального объема, так как тогда он остается всегда минимальным.
Для исключения влияния второго управляющего золотника 54 в разделенном положении он, прежде всего с помощью цилиндровой структуры, 132 заводится на участок 142 корпуса, причем цилиндрическая камера 134 определена по размерам так, что она одновременно охватывает входную камеру 148 для второго управляющего золотника 54 и, таким образом, создает возможность для того, чтобы передвигать второй управляющий золотник 54 в сторону от первого управляющего золотника 52 настолько, что торцевая поверхность 88 больше не влияет на конечный объем.
Таким образом, второй управляющий золотник 54 позволяет влиять на конечный объем за счет того, что он или для образования объединенного положения управляющих золотников 52, 54 прилегает своей торцевой поверхностью 88 к торцевой поверхности 86 первого управляющего золотника 52 и таким образом максимизирует конечный объем, или может своей собственной торцевой поверхностью 88 передвигаться в сторону от торцевой поверхности 86 первого управляющего золотника 52 настолько, что второй управляющий золотник 54 более не оказывает никакого влияния на конечный объем, а он определен торцевой поверхностью 86.
Для регистрации положений первого управляющего золотника 52 и второго управляющего золотника 54 предусмотрен обозначенный в целом ссылочным обозначением 152 блок регистрации положения, который содержит простирающийся параллельно направлению 72 перемещения управляющих золотников 52, 54 и, таким образом, параллельно осям 22, 24 винтового ротора детекторный элемент 154, который в состоянии регистрировать положения элементов 156 и 158 индикации положения.
При этом элемент 156 индикации положения жестко связан с первым управляющим золотником 52, а именно с примыкающей к торцевой поверхности 86 конечной областью 162 первого управляющего золотника 52, а элемент 158 индикации положения связан со вторым управляющим золотником 54, а именно с примыкающей к торцевой поверхности 88 конечной областью 164 такового, как это изображено, прежде всего, на фиг. 9.
Как изображено на фиг. 10, каждый из этих элементов 156 или же 158 индикации положения содержит обозначенный в целом ссылочным обозначением 174 вилочный элемент, который своими двумя вилочными полками 176 и 178 ограничивает находящее между ними промежуточное пространство 182, через которое проходит простирающийся вдоль детекторный элемент 154. Каждый из этих вилочных элементов 174 через соединенный с соответствующей конечной областью 162 или же 164 соединительный элемент 172 связан с соответствующим управляющим золотником 52, 54.
Вилочные полки 176 и 178, преимущественным образом, держат магниты 184 или же 186, магнитное поле которых пронизывает детекторный элемент 154 в месте нахождения магнитов 184, 186.
При этом детекторный элемент 154 выполнен из магнитострикционного материала, так что соответствующее место 188 вызванного магнитами 184, 186 протекания магнитных полей через детекторный элемент 154 является определяемым с помощью обозначенного в целом ссылочным обозначением 192 блока обработки данных, причем блок 192 обработки данных, например, в магнитострикционном детекторном элементе 154 генерирует звуковые волны, которые в местах 188, через которые протекают магнитные поля магнитов 184, 186, испытывают обратное отражение, так что на основании времени прохождения отраженных звуковых волн блок 192 обработки данных может определять положение мест 188, в которых происходит протекание магнитных полей через магнитострикционный детекторный элемент 154.
Соединительные элементы 172, которые удерживаются в соответствующих конечных областях 162, 164 управляющих золотников 52, 54, пронизывают простирающийся вдоль, выполненный в форме канавки проем 194, который выполнен в образующей золотниковый канал 56 стенке 196 корпуса и имеет длину, которая в разделенном положении допускает полное вхождение второго управляющего золотника 54 во входную камеру 148, и положение первого управляющего золотника 52 при минимальном начальном объеме, то есть положение соответственно фиг. 8, и положение первого управляющего золотника 52 при минимальном объемном отношении, то есть при максимальном расстоянии от впускной кромки 82 до находящейся с напорной стороны замыкающей поверхности 84, и, кроме того, в объединенном положении допускает положение второго управляющего золотника 54 с первым управляющим золотником 52 при максимальном объемном отношении (фиг. 5) и минимальном объемном отношении (фиг. 4).
Каждый, соединенный с соответствующей конечной областью 162 и 164 соответствующего управляющего золотника 52 или же 54 соединительный элемент 172 образует вместе с выполненным в форме канавки проемом 194 предохранение от прокручивания для соответствующего управляющего золотника 52, 54 аналогично направляющей, образованной пазовым сухарем и пазом, так что вместе с тем отпадает необходимость того, чтобы предусматривать в управляющих золотниках 52, 54 пазы, которые взаимодействуют с выступающими в золотниковый канал 56 пазовыми сухарями.
Проем 194 всегда поддерживается в камере 42 низкого давления под давлением и служит, таким образом, также для того, чтобы удерживать управляющие золотники 52, 54 с их направляющими окружными поверхностями 58 в прилегании к золотниковому каналу 56, так что управляющие золотники 52, 54 не могут за счет образующегося между золотниковым каналом 56 и направляющими окружными поверхностями 58 высокого давления прижиматься стенными поверхностями 62, 64 золотника к винтовым роторам 26, 28.
При этом уплотнение проема 194 против более высоких давлений, прежде всего также против высокого давления, осуществляется за счет назначаемого с малыми допусками зазора между золотниковым каналом 56 и направляющими окружными поверхностями 58 управляющих золотников 52, 54.
Для размещения вилочных элементов 174 и детекторного элемента 154 на находящейся напротив золотникового канала 56 стороне стенки 196 основного элемента 198 корпуса предусмотрено углубление 204, которое закрыто крышкой 212, которая, со своей стороны, имеет обращенное к углублению 204 углубление 214, так что углубления 204 и 214 взаимно дополняются и за счет этого образуют, например, проходящий параллельно направлению 72 перемещения, простирающийся вдоль детекторный канал 216, в котором, с одной стороны, простирается детекторный элемент 154 и в котором, с другой стороны, являются передвигаемыми вилочные элементы 174, которые своими вилочными полками 176, 178 с обеих сторон охватывают детекторный элемент 154 и позиционируют магниты 184, 186 таким образом, что их магнитное поле протекает через детекторный элемент 154 в определяемом каждый раз месте 188.
Крышка 212, преимущественным образом, выполнена так, что в ее углублении 214 находится детекторный элемент 154 так, что детекторный элемент 154 вместе с блоком 192 обработки данных удерживается исключительно в крышке 212 и является снимаемым вместе с ней, в то время как вилочные элементы 174 простираются в детекторном канале 216, прежде всего как в углублении 214, так и в углублении 204.
Во втором упрощенном примере выполнения соответствующего изобретению винтового детандера предусмотрен, как изображено на фиг. 11-14, только первый управляющий золотник 52'.
Прежде всего, такие же компоненты, как в первом примере выполнения, снабжены такими же ссылочными обозначениями, но выделены специальным символом ('), так что в отношении описания таковых в подробностях в случае, если не дается более подробное описание, делается ссылка на изложения, а также, прежде всего, на фиг. 1 и фиг. 3 к первому примеру выполнения.
В этом втором примере выполнения первый управляющий золотник 52' находится в золотниковом канале 56' и направляется в нем своей направляющей окружной поверхностью 58'. Помимо этого, первый управляющий золотник 52' образует внешние стенные поверхности 62'1 и 64'1 золотника, которые непосредственно примыкают к стенным поверхностям 66' и 68' корпуса, причем стенная поверхность 62'1 золотника граничит с винтовым ротором 26', а стенная поверхность 64'1 золотника - с винтовым ротором 28'.
Первый управляющий золотник 52' образует, помимо этого, впускную кромку 82', которая расположена с обращением к камере 44' высокого давления и которая за счет своего расстояния до замыкающей поверхности 84' устанавливает начальный объем сравнимым образом, как это имеет место в первом примере выполнения.
Помимо этого, первый управляющий золотник 52' образует впускную кромку 86', которая определяет конечный объем, причем первый управляющий золотник 52' имеет такую протяженность параллельно осям 22, 24 винтового ротора, что с его помощью, во-первых, является настраиваемым максимальное объемное отношение Vi, если впускная кромка 82' имеет наименьшее возможное расстояние до замыкающей поверхности 84', а впускная кромка 86' еще не достигла замыкающей поверхности 126', а находится в камере 135' на находящемся со стороны низкого давления участке 142' корпуса, и, во-вторых, является настраиваемым пониженное объемное отношение Vi, например с минимальным начальным объемом, если первый управляющий золотник 52' передвигается впускной кромкой 82' в камеру 44' высокого давления, а впускная кромка 86' задает конечный объем (фиг. 12).
Можно было бы, однако, также настраивать пониженное объемное отношение V1 посредством того, что первый управляющий золотник 52' вводится впускной кромкой 86' в камеру 135' на находящемся со стороны низкого давления участке 142' корпуса, так что начальный объем для расширения определяется впускной кромкой 82' вдоль винтовых роторов 26', 28' и на расстоянии от замыкающей поверхности 84', чтобы задавать больший начальный объем (фиг. 13).
В этом случае за счет большего начального объема объемный поток, конечно, больше.
Для регистрации положения первого управляющего золотника 52' тоже предусмотрен блок 152' регистрации положения, который имеет связанный с первым управляющим золотником 52' элемент 156' индикации положения, который, например в виде клинового элемента, простирается вдоль первого управляющего золотника 52' и взаимодействует с детекторным элементом 154', они оба расположены в детекторном канале 216 корпуса 12' детандера.
В третьем примере выполнения, изображенном на фиг. 14, который представляет собой модификацию второго примера выполнения, вместо выполненного в виде цилиндровой структуры привода золотника предусмотрен выполненный в виде привода 113 с ходовым винтов привод золотника, который имеет электрический приводной двигатель 115, с помощью которого является приводимым в действие ходовой винт 117, причем ходовой винт 117 входит в зацепление с внутренней резьбой 119 золотника 52' так что при вращающемся с помощью приводного двигателя 115 приводе ходового винта 117 золотник 52' выполнен с возможностью передвижения в направлении 72 перемещения аналогично гайке ходового винта и передвигаемым в соответственно предусмотренные положения, причем ходовой винт 117 может быть выполнен еще так, что он является самотормозящимся и таким образом удерживает управляющий золотник 52' в соответствующей положения.
Приводной двигатель 115 является питаемым электрическим током или от генератора 30', или от отдельного, интегрированного в детандер 10 генератора 121, или от внешней сети.
Помимо этого, в качестве блока 152'' регистрации положения предусмотрен датчик угла поворота с элементом 156'' индикации положения, и детекторным элементом 154'', и блоком 192'' обработки данных, который регистрирует поворотные положения приводного двигателя 115, на основании которых делается обратное заключение о заданной ходовым винтом 117 положения управляющего золотника 52'.
В отношении другого образования и признаков третьего примера выполнения делается в полном объеме ссылка на изложения к первому и второму примеру выполнения.
В остальном, элементы третьего примера выполнения снабжены такими же ссылочными обозначениями, как в первом и втором примерах выполнения, так что делается ссылка на них.
Как в первом, так и во втором и третьем примерах выполнения для передвижения управляющих золотников 52, 52' и 54 в предусмотренные для них положения, как изображено на фиг.2, предусмотрено устройство 218 управления, которое за счет соединения с блоком 152, 152', 152'' регистрации положения в состоянии определять фактические положения управляющих золотников 52, 52', 54.
Как изображено на фиг. 1 и 2, устройством 218 управления являются управляемыми соответствующие приводы золотника, например цилиндровые структуры 112, 112' и 132 или привод 113 с ходовым винтом, чтобы позиционировать соответствующие управляющие золотники 52, 52', 54.
В дополнение к этому являются управляемыми, например, магнитные клапаны ML1 и ML2, чтобы управлять подачей масла к цилиндровой структуре 112, 112' для первого управляющего золотника 52, 52', и являются управляемыми магнитные клапаны MV1 и MV2, чтобы управлять подачей масла к цилиндровой структуре 132 для второго управляющего золотника 54, или является управляемым приводной двигатель 115.
Во всех примерах выполнения устройство 218 управления регистрирует с помощью датчика SPH давления (фиг. 2, фиг. 11, фиг. 14) высокое давление РН, а с помощью датчика SPN давления (фиг. 2, фиг. 11 и фиг. 14) - получившееся после расширения низкое давление PN и, основываясь на зарегистрированном отношении давлений PV = PH/PN, посредством сравнения, по меньшей мере, с первым граничным значением G1, управляет, например, положением первого управляющего золотника 52 и второго управляющего золотника 54 в первом примере выполнения или только положением первого управляющего золотника 52' во втором выполнении.
Если отношение давлений PV больше, чем это граничное значение G1, то настраивается максимальное объемное отношение Vi, а если отношение давлений PV меньше, чем граничное значение G1, то настраивается пониженное объемное отношение.
В первом примере выполнения максимальное объемное отношение имеется в положении первого и второго управляющего золотника 52, 54 согласно фиг. 5, а пониженное объемное отношение имеется в положении первого и второго управляющего золотника 52, 54 согласно фиг. 4 при максимальном объемном потоке или, например, согласно фигурам 6, 7 при пониженном объемном потоке или согласно фиг. 8 при минимальном объемном потоке.
Во втором и третьем примерах выполнения максимальное объемное отношение Vi имеется в положении первого управляющего золотника 52' согласно фиг. 11 или фиг. 14, или пониженное объемное отношение имеется в положении согласно фиг. 12 или 13 при одинаковом объемном отношении.
Так как при пониженном объемном отношении возможны несколько положений золотника, имеется также возможность изменения положений золотника с пониженными объемными отношениями, например за счет установления других граничных значений Gw, причем при превышенной или заниженной величине относительно другого такого граничного значения Gw устройством 218 управления тоже осуществляется переход к большему пониженному объемному отношению Vi или же к меньшему пониженному объемному отношению.
Устройство 218 управления может еще далее оптимизироваться в отношении своего функционирования, если оно регистрирует положения управляющих золотников 52, 54 или 52' с помощью описанного блока 152, 152', 152'' регистрации положения и управляет соответствующим приводом золотника, например за счет синхронной работы магнитных клапанов ML1 и ML2, а также, в известных случаях, MV1 MV2 управляет цилиндровыми структурами 112, 112' и, в известном случае, еще 132 или управляет подходящей работой приводного двигателя 115, чтобы, например, подводить предварительно определенные положения управляющих золотников 52, 52' и 54 для установки заданных объемных отношений Vi.
Прежде всего, имеется также возможность того, чтобы с помощью устройства 218 управления позиционировать управляющие золотники 52, 52', 54 с регулировкой по положению, то есть, например, точно подводить и поддерживать определенные программой управления детандером и возможные в рамках возможности перемещения управляющего золотника положения этих управляющих золотников 52, 52', 54.
Такая программа управления детандером работает, например, в верхнеуровневом устройстве управления детандером.
В представленных примерах выполнения эта программа управления детандером интегрирована, прежде всего, в устройство 218 управления, причем, прежде всего, известны границы применения винтового детандера 10 и параметры газообразной рабочей среды, то есть, прежде всего, хладагента, и, например, с помощью датчика SPN давления (фигуры 2, 11, 14) регистрирует низкое давление, с помощью датчика SPH давления (фигуры 2, 11, 14) - высокое давление и с помощью температурного датчика STH - температуру рабочей среды на стороне высокого давления (фиг. 2), а также с помощью температурного датчика STN температуру рабочей среды на стороне низкого давления.
Кроме того, прежде всего также с помощью устройства 218 управления, может осуществляться еще регистрация рабочих параметров электрического генератора 30 в отношении скорости вращения, потребляемой мощности, напряжения и температуры.
Помимо этого, устройство 218 управления может регистрировать, прежде всего, также давление смазочного материала, течение смазочного материала, уровень смазочного материала и температуру смазочного материала.
Помимо этого, прежде всего, устройству 218 управления через внешний сигнал задается также требуемая производительность детандера, например для расширительного контура, в котором работает винтовой детандер 10.
На основании некоторых, избранных из этих величин, прежде всего на основании информации о рабочей среде, например о хладагенте, о давлении и температуре на стороне высокого давления и на стороне низкого давления, а также о скорости вращения винтовых роторов 26, 28, или на основании других из этих, упомянутых выше величин с помощью устройства 218 управления программой управления детандером может определяться и настраиваться с регулировкой по положению оптимальная положение управляющих золотников 52, 52' и 54 для соответствующего рабочего состояния.
Изображенная на фиг. 14 установка для получения электрической энергии из тепла, прежде всего для получения электрической энергии из отходящего тепла, содержит изображенный на фиг. 15 замкнутый процесс, прежде всего работающий с циклом Ренкина замкнутый процесс, в котором введенная в контур 240 рабочая среда, исходя из конденсированного состояния, уплотняется компрессором 242, который приводится в действие двигателем 244.
В последующем теплообменнике 246 рабочая среда испаряется за счет подачи тепла из теплового потока 248.
Подача тепла через тепловой поток 248 осуществляется, например, с помощью контура 250 горячей воды, который проходит через теплообменник 246 и в котором расположен насос 252 горячей воды для обеспечения циркуляции горячей воды в контуре 250 горячей воды, который, со своей стороны, приводится в действие двигателем 254.
Испарившаяся за счет подачи теплового потока 248 в теплообменник 246 рабочая среда подается в расположенную в контуре 240 вслед за теплообменником 246 детандерную установку 260, которая содержит, прежде всего, описанный выше винтовой детандер 10, которым приводится в действие генератор 30 для генерации электрического тока.
После протекания через винтовой детандер 10 рабочая среда подается в контуре 250 в теплообменник 262, в котором рабочая среда конденсируется, причем с помощью теплообменника 262 осуществляется отбор теплового потока 264.
Для этого предусмотрен, прежде всего, контур 270 холодной воды, который тоже проходит через теплообменник 262, причем в контуре 270 холодной воды расположен насос 272 холодной воды, который приводится в действие двигателем 274.
С помощью компрессора 242, прежде всего, осуществляется изоэнтропийное, преимущественным образом идеальное изоэнтропийное, уплотнение образованного в теплообменнике 262 жидкого насыщенного конденсата рабочей среды, и в теплообменнике 246 происходит по существу изобарное испарение переохлажденной системы вплоть до достижения парообразного насыщенного состояния, в котором рабочая среда затем подается на детандерную установку 260, причем в винтовом детандере 10 при расширении происходит механическая работа, за счет которой приводится в действие генератор 30.
В теплообменнике 262 за счет отбора теплового потока 264 происходит в завершение изобарная, прежде всего полностью изобарная, конденсация рабочей среды, так что тогда жидкий насыщенный конденсат может снова подаваться на компрессор 242.
В качестве рабочей среды применяются, прежде всего, органические рабочие среды, как например: R245fa, R1224yd(z), R1336mzz(Z), R1336mzz(E), R1233zd, R1234ze, R1234yf, R134a, R245fa и их смеси или подобные среды.
Подобный замкнутый процесс служит, преимущественным образом, для использования промышленного отходящего тепла, которое возникает, например, в диапазоне от 85°С до 700°С, причем с помощью описанного выше замкнутого процесса это отходящее тепло может оптимальным образом преобразовываться в электрическую энергию.
Так как в замкнутом процессе подача теплового потока 248, а также отбор теплового потока 264 изменяются, то изменяются также имеющиеся в винтовом детандере высокое давление РН и низкое давление PN, которые регистрируются с помощью датчиков SPH и SPN, и, таким образом, также отношение давлений PV, так что преимуществом является адаптация винтового детандера 10 к измененным отношениям давлений, чтобы, с одной стороны, предотвращать чрезмерное расширение и, с другой стороны, избегать неполного расширения, которые в каждом случае приводят к тому, что винтовой детандер 10 с генератором 30 не может преобразовывать выделенную в контуре 240 и предоставленную в распоряжение энергию в электрическую энергию.
Такую адаптацию к различным отношениям давлений позволяют осуществлять описанные выше винтовые детандеры 10 с различными положениями управляющих золотников 52, 52', 54, которые являются реализуемыми за счет различных описанных возможностей устройства 218 управления таковыми.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ КОМПРЕССОР (ВАРИАНТЫ) | 2015 |
|
RU2684053C2 |
| КОМПРЕССОРНЫЙ МОДУЛЬ И СПОСОБ ЭКСПЛУАТАЦИИ КОМПРЕССОРНОГО МОДУЛЯ | 2016 |
|
RU2729967C2 |
| ВИНТОВОЙ КОМПРЕССОР (ВАРИАНТЫ) | 2016 |
|
RU2713784C1 |
| ВИНТОВОЙ КОМПРЕССОР | 2017 |
|
RU2733501C1 |
| ПАРОВОДЯНОЙ ВИНТОВОЙ ДЕТАНДЕР | 2010 |
|
RU2432465C1 |
| Винтовой детандер | 1979 |
|
SU868285A1 |
| Винтовой детандер | 1979 |
|
SU853312A1 |
| ДЕТАНДЕРНАЯ УСТАНОВКА И УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ИЗ ТЕПЛА | 2020 |
|
RU2800533C2 |
| Винтовой детандер | 1976 |
|
SU606041A1 |
| ХОЛОДИЛЬНАЯ УСТАНОВКА | 2018 |
|
RU2782721C2 |
Группа изобретений относится к винтовому детандеру и установке для получения электрической энергии из тепла с помощью винтового детандера. Детандер (10) содержит корпус (12) с расположенной в нем камерой, два расположенных в камере винтовых ротора, которые своими винтовыми контурами входят в зацепление друг с другом и взаимодействуют с соответственно граничащими с ними и частично охватывающими их стенными поверхностями, чтобы через расположенную в корпусе (12) камеру высокого давления принимать подведенную рабочую среду и отдавать ее в области расположенной в корпусе (12) камеры низкого давления, приводимый в действие с помощью винтовых роторов генератор, по меньшей мере один управляющий золотник, устройство (218) управления, выполненное с возможностью управления приводом соответствующего управляющего золотника для установки подходящего для расширения рабочей среды объемного отношения, образованного из конечного объема, деленного на начальный объем. Группа изобретений направлена на обеспечение возможности адаптации к разным рабочим состояниям винтового детандера. 2 н. и 24 з.п. ф-лы, 15 ил.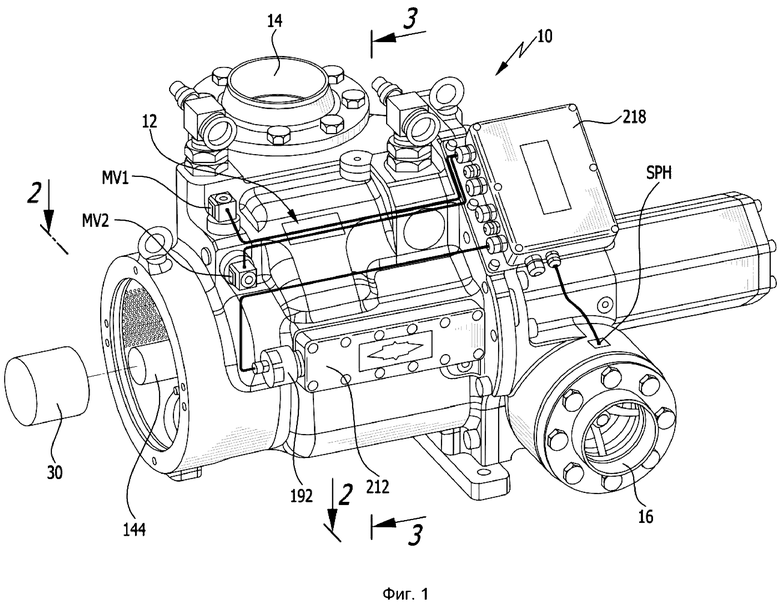
1. Винтовой детандер (10), содержащий:
- корпус (12) детандера с расположенной в нем камерой (18) винтовых роторов,
- два расположенных в камере (18) винтовых роторов и установленных в корпусе (12) детандера с возможностью вращения вокруг соответствующих осей (22, 24) винтовых ротора (26, 28), которые своими винтовыми контурами (32, 34) входят в зацепление друг с другом и взаимодействуют с соответственно граничащими с ними и частично охватывающими их стенными поверхностями (36, 38), чтобы через расположенную в корпусе (12) детандера камеру (44) высокого давления принимать подведенную рабочую среду и отдавать ее в области расположенной в корпусе (12) детандера камеры (42) низкого давления, причем газообразная рабочая среда при высоком давлении (РН) заключается с начальным объемом в образованные между винтовыми контурами (32, 34) и граничащими с ними стенными поверхностями (36, 38) камеры расширения и расширяется при низком давлении (PN) до конечного объема,
- приводимый в действие с помощью винтовых роторов (26, 28) генератор (30),
- по меньшей мере один расположенный в золотниковом канале (56) корпуса (12) детандера и граничащий стенными поверхностями (62, 64) золотника с обоими винтовыми роторами (26, 28) управляющий золотник (52, 52', 54), который выполнен с возможностью передвижения в направлении (72) перемещения параллельно осям (22, 24) винтового ротора и за счет этого выполнен с оказанием влияния на конечный объем и/или начальный объем, причем для передвижения управляющего золотника (52, 52', 54) в различные положения предусмотрен привод (112, 132, 113) золотника,
- устройство (218) управления, выполненное с возможностью управления приводом (112, 132) соответствующего управляющего золотника (52, 52', 54) для установки подходящего для расширения рабочей среды объемного отношения (Vi), образованного из конечного объема, деленного на начальный объем,
причем устройство (218) управления выполнено таким образом, чтобы посредством соответствующих датчиков (SPH, SPN), расположенных со стороны высокого давления и со стороны низкого давления, регистрировать высокое давление (РН) и низкое давление (PN), определять на их основании отношение (PV) высокого давления (РН) к низкому давлению (PN) и посредством управления соответствующим приводом (112, 132, 113) золотника позиционировать соответствующий управляющий золотник (52, 52', 54) в соответствии с возрастанием отношения (PV) высокого давления (РН) к низкому давлению (PN) выше по меньшей мере одного заданного граничного значения (G1) или уменьшением отношения (PV) высокого давления (РН) к низкому давлению (PN) ниже по меньшей мере одного заданного граничного значения (G1).
2. Винтовой детандер по п. 1, отличающийся тем, что винтовой детандер (10) имеет два управляющих золотника (52, 54), причем первый управляющий золотник (52) выполнен с оказанием влияния на начальный объем, а второй управляющий золотник (54) выполнен с оказанием влияния на конечный объем.
3. Винтовой детандер по п. 1 или 2, отличающийся тем, что при уменьшении ниже по меньшей мере одного граничного значения (G1) устройство (218) управления передвигает по меньшей мере один управляющий золотник (52, 52', 54) в положение с меньшим объемным отношением (V1) конечного объема к начальному объему.
4. Винтовой детандер по одному из предшествующих пунктов, отличающийся тем, что при возрастании выше по меньшей мере одного граничного значения (G1) устройство (218) управления передвигает по меньшей мере один управляющий золотник (52, 52', 54) в положение с большим объемным отношением (Vi) конечного объема к начальному объему.
5. Винтовой детандер по одному из предшествующих пунктов, отличающийся тем, что устройство (218) управления позиционирует управляющий золотник (52, 52', 54) соответственно возрастанию выше или уменьшению ниже нескольких граничных значений (G1, Gw) для отношения (PV) давлений.
6. Винтовой детандер по одному из предшествующих пунктов, отличающийся тем, что устройство (218) управления передвигает соответствующий управляющий золотник (52, 52', 54) в соответствующие предварительно определенным объемным отношениям (Vi) положения золотника.
7. Винтовой детандер по одному из предшествующих пунктов, отличающийся тем, что устройство (218) управления позиционирует соответствующий управляющий золотник (52, 52', 54) с регулировкой по положению.
8. Винтовой детандер по одному из предшествующих пунктов, отличающийся тем, что устройство (218) управления рассчитывает с учетом по меньшей мере одного или нескольких из параметров, таких как уровень (PN) давления при низком давлении, уровень (РН) давления при высоком давлении, температура газообразной рабочей среды при высоком давлении (РН) и при низком давлении (PN), скорость вращения винтовых роторов (26, 28), потребляемая мощность генератора (30), параметры газообразной рабочей среды, прежде всего хладагента, и примененные граничные значения винтового детандера (10), положения управляющих золотников (52, 52', 54).
9. Винтовой детандер по одному из предшествующих пунктов, отличающийся тем, что по меньшей мере для одного управляющего золотника (52, 52', 54) предусмотрен блок (152, 152', 152") регистрации положения.
10. Винтовой детандер по п. 9, отличающийся тем, что блок (152) регистрации положения имеет связанный с положением по меньшей мере одного управляющего золотника (52, 52', 54) элемент (156, 156', 156", 158) индикации положения, что по меньшей мере один элемент (156, 156', 156", 158) индикации положения взаимодействует с детекторным элементом (154), и что детекторный элемент (154) связан с блоком (192, 192', 192") обработки данных, который регистрирует положения элемента (156, 156', 156", 158) индикации положения.
11. Винтовой детандер по п. 10, отличающийся тем, что по меньшей мере один элемент (156, 156', 158) индикации положения выполнен с возможностью передвижения параллельно направлению (72) перемещения по меньшей мере одного управляющего золотника (52, 52', 54) вместе с ним.
12. Винтовой детандер по п. 10 или 11, отличающийся тем, что для обоих управляющих золотников (52, 54) предусмотрен один блок (152) регистрации положения, который содержит связанный с первым управляющим золотником (52) первый элемент (156) индикации положения и связанный со вторым управляющим золотником (54) второй элемент (158) индикации положения, и что оба элемента (156, 158) индикации положения взаимодействуют с общим детекторным элементом (154).
13. Винтовой детандер по одному из пп. 10-12, отличающийся тем, что детекторный элемент (154), вдоль которого является передвигаемым элемент (156, 158) индикации положения, простирается параллельно направлению (72) перемещения по меньшей мере одного управляющего золотника (52, 54).
14. Винтовой детандер по п. 12 или 13, отличающийся тем, что детекторный элемент (154), вдоль которого при передвижении управляющих золотников (52, 52', 54) являются передвигаемыми элементы (156, 156', 158) индикации положения, простирается параллельно направлению (72) перемещения первого и второго управляющих золотников (52, 54).
15. Винтовой детандер по одному из пп. 9-14, отличающийся тем, что блок (152, 152') регистрации положения расположен в проходящем внутри корпуса (12) детандера параллельно направлению (72) перемещения детекторном канале (216).
16. Винтовой детандер по одному из пп. 10-15, отличающийся тем, что соответствующий элемент (156, 156', 158) индикации положения расположен в детекторном канале (216).
17. Винтовой детандер по одному из пп. 10-16, отличающийся тем, что соответствующий элемент (156, 156', 156", 158) индикации положения взаимодействует с детекторным элементом (154) бесконтактно.
18. Винтовой детандер по одному из пп. 2-17, отличающийся тем, что первый управляющий золотник (52) и второй управляющий золотник (54) расположены находящимися друг за другом в направлении (72) их перемещения.
19. Винтовой детандер по п. 18, отличающийся тем, что первый управляющий золотник (52) и второй управляющий золотник (54) имеют идентичный внешний контур.
20. Винтовой детандер по п. 18 или 19, отличающийся тем, что первый управляющий золотник (52) и второй управляющий золотник (54) в объединенном положении являются позиционируемыми непосредственно с примыканием друг к другу и передвигаемыми вместе в направлении (72) перемещения.
21. Винтовой детандер по одному из пп. 18-20, отличающийся тем, что первый и второй управляющие золотники (52, 54) в разделенном положении являются позиционируемыми на расстоянии друг от друга с образованием промежуточного пространства.
22. Винтовой детандер по одному из пп. 2-21, отличающийся тем, что первый управляющий золотник (52) жестко соединен с поршнем (116) цилиндровой структуры (112), образующей первый привод золотника и предназначенной для передвижения первого управляющего золотника (52).
23. Винтовой детандер по одному из пп. 2-22, отличающийся тем, что второй управляющий золотник (54) жестко соединен с поршнем (136) цилиндровой структуры (132), образующей второй привод золотника и предназначенной для передвижения второго управляющего золотника (54).
24. Винтовой детандер по одному из пп. 1-21, отличающийся тем, что по меньшей мере один управляющий золотник (52') приводится в действие посредством привода (113) с ходовым винтом.
25. Винтовой детандер по п. 24, отличающийся тем, что привод (113) с ходовым винтом приводится в действие с помощью электрического приводного двигателя (115).
26. Установка для получения электрической энергии из тепла, содержащая замкнутый процесс, в котором введенная в контур (240) рабочая среда, исходя из конденсированного состояния, уплотняется, испаряется за счет подачи тепла, расширяется в детандерной установке (260) и вслед за этим конденсируется за счет отвода тепла, отличающаяся тем, что для расширения рабочей среды детандерная установка (260) имеет по меньшей мере один винтовой детандер (10) по одному из предшествующих пунктов.
| US 2020080559 A1, 12.03.2020 | |||
| DE 102011121274 A1, 16.08.2012 | |||
| DE 102015116324 A1, 14.04.2016 | |||
| СИСТЕМА ЭНЕРГОСНАБЖЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2330939C1 |
| Запорное устройство | 1990 |
|
SU1751569A1 |
| Винтовой детандер | 1979 |
|
SU853312A1 |
| Самоблокирующийся дифференциал ведущего моста транспортного средства | 1980 |
|
SU1072796A3 |
| УСТРОЙСТВО для ХРАНЕНИЯ И ТРАНСПОРТИРОВАНИЯ ПОСАДОЧНОГО МАТЕРИАЛА | 0 |
|
SU386607A1 |

