ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу распознавания объектов и устройству распознавания объектов.
УРОВЕНЬ ТЕХНИКИ
[0002] В предшествующем уровне техники известно устройство слежения за объектом, которое измеряет положение обнаруживаемого целевого транспортного средства, движущегося возле задействуемого транспортного средства, посредством использования датчика передачи/приема с использованием лазера (см. JP 2016-148514 A).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Согласно вышеупомянутому устройству, раскрытому в JP 2016-148514 A, опорная точка положения объекта вычисляется посредством группирования точек, близких друг к другу, в группу точек, полученную посредством датчика передачи/приема и аппроксимации в качестве прямоугольника. Однако простое группирование точек рядом друг с другом может ошибочно распознать облака точек, принадлежащие множеству близких объектов, как облако точек, принадлежащее одному и тому же объекту. Например, когда L-образная полость образована боковыми поверхностями двух объектов, облака точек, принадлежащие боковым поверхностям двух объектов, могут быть ошибочно распознаны как облако точек одного и того же объекта. В этом случае, если выполняется аппроксимация прямоугольником на основе облаков точек, то можно распознать, что прямоугольный объект (выпуклый объект) существует в полости, в которой такой объект не существует, что является проблемой.
[0004] Целью настоящего изобретения является предоставление технологии, которая может правильно распознавать положение объекта, существующего в окружающем пространстве, посредством определения того, являются ли или нет облака точек, полученные посредством датчика, облаками точек, соответствующими множеству объектов (множественным объектам).
[0005] Способ распознавания объектов является одним из аспектов настоящего изобретения и представляет собой способ распознавания объектов с использованием датчика, выполненного с возможностью получения положения объекта, существующего в окружающем пространстве, в качестве облаков точек, включающих в себя множество точек обнаружения на виде сверху. Данный способ включает в себя: группирование облаков точек согласно близости; определение при выполнении аппроксимации многоугольником в отношении сгруппированных облаков точек, расположена ли или нет по меньшей мере часть точек обнаружения, составляющих сгруппированные облака точек, в непросматриваемой зоне аппроксимационного многоугольника, полученного посредством аппроксимации многоугольником в отношении облаков точек относительно датчика; распознавание сгруппированного облака точек в качестве облаков точек, соответствующих множеству объектов, когда определено, что точки обнаружения расположены в непросматриваемой зоне относительно датчика; и распознавание сгруппированных облаков точек в качестве облаков точек, соответствующих одиночному объекту аппроксимационного многоугольника, когда определено, что точки обнаружения не расположены в непросматриваемой зоне относительно датчика.
[0006] Варианты осуществления настоящего изобретения будут подробно описаны ниже со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
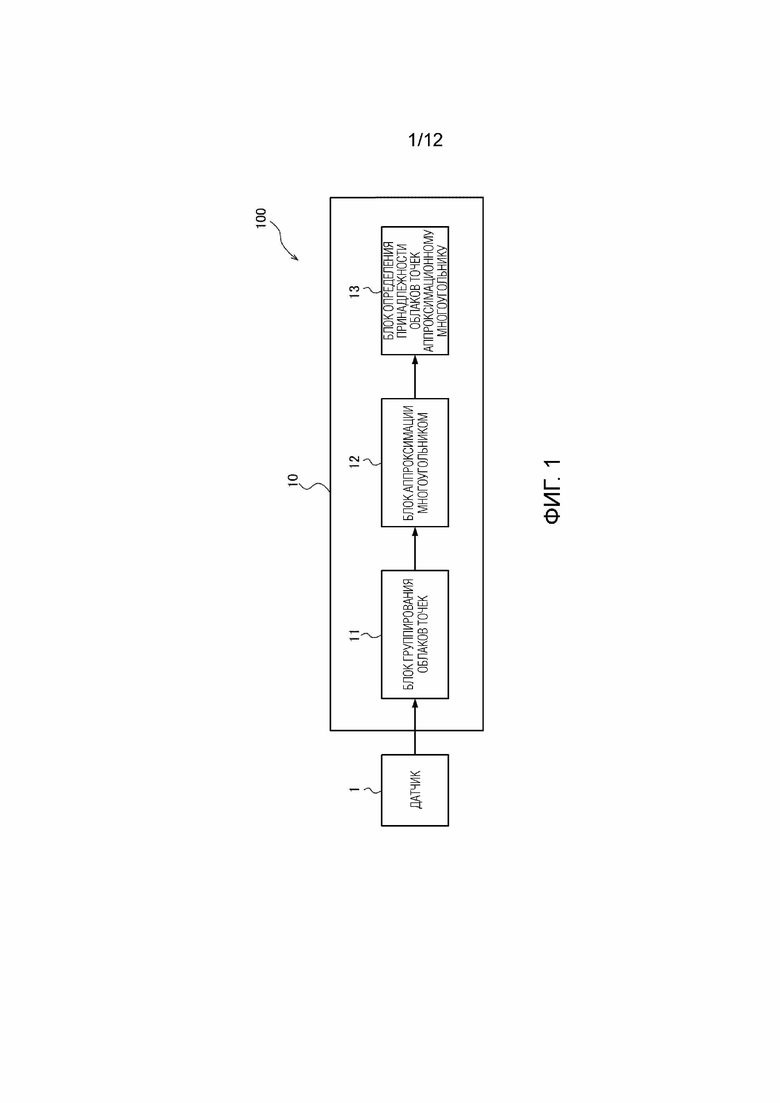
[0007] На Фиг.1 показана блок-схема, иллюстрирующая пример конфигурации устройства распознавания объектов согласно первому варианту осуществления.
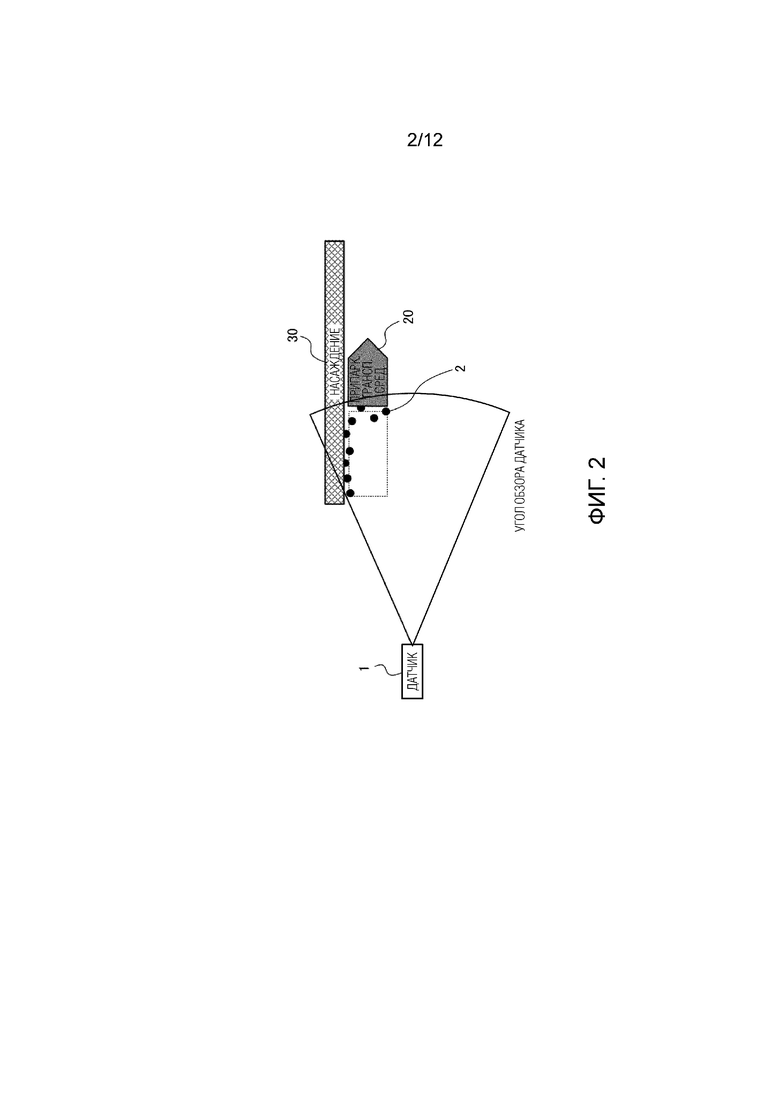
На Фиг.2 показана схема, иллюстрирующая пример облаков точек, полученных устройством распознавания объектов.
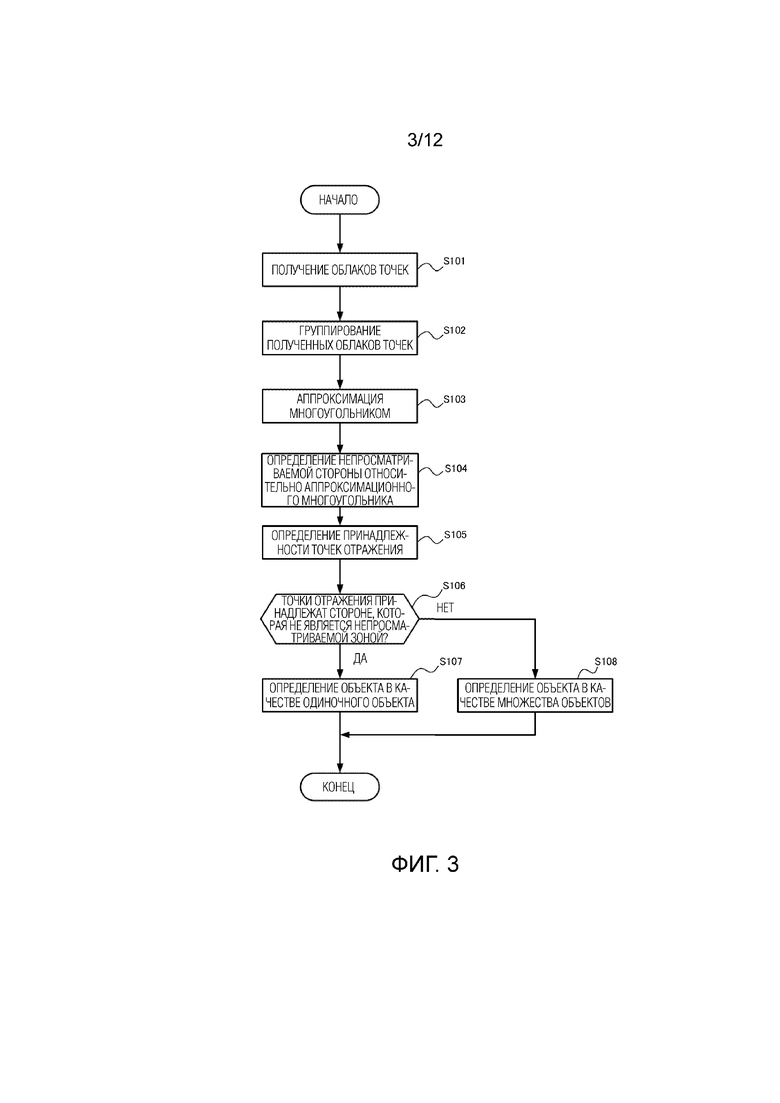
На Фиг.3 показана блок-схема последовательности операций, иллюстрирующая способ распознавания объектов устройством распознавания объектов согласно первому варианту осуществления.
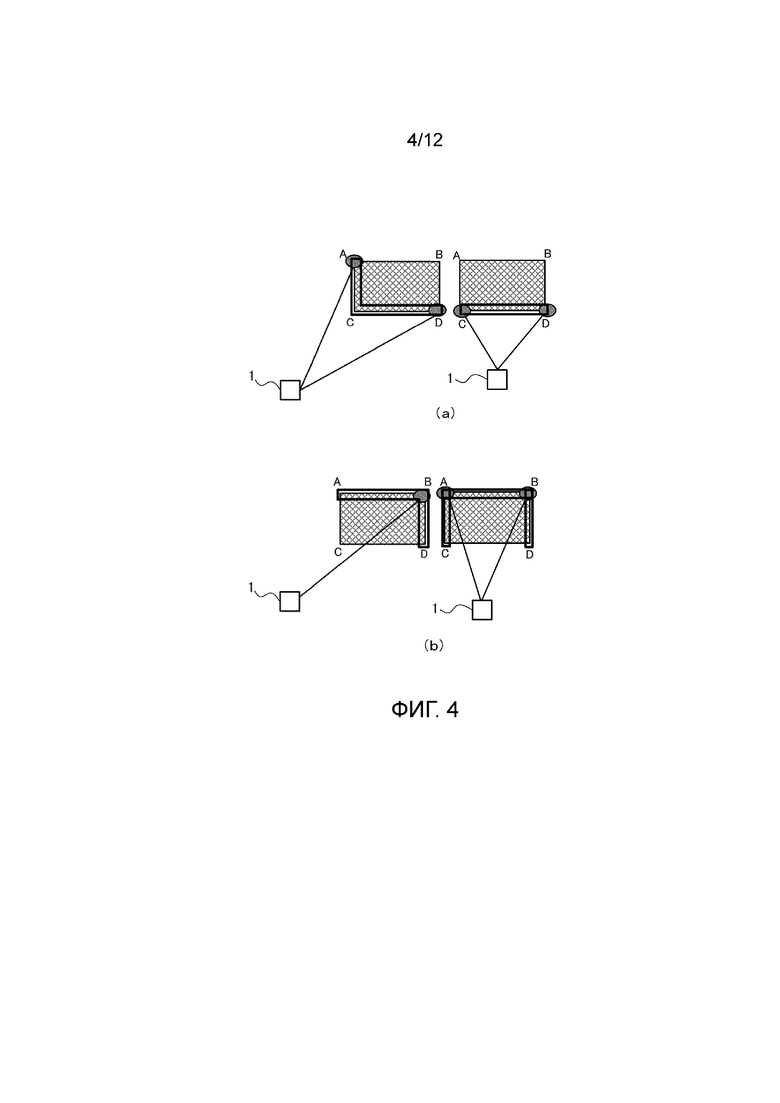
На Фиг.4 показана схема, иллюстрирующая способ определения непросматриваемых сторон, составляющих аппроксимационный многоугольник.
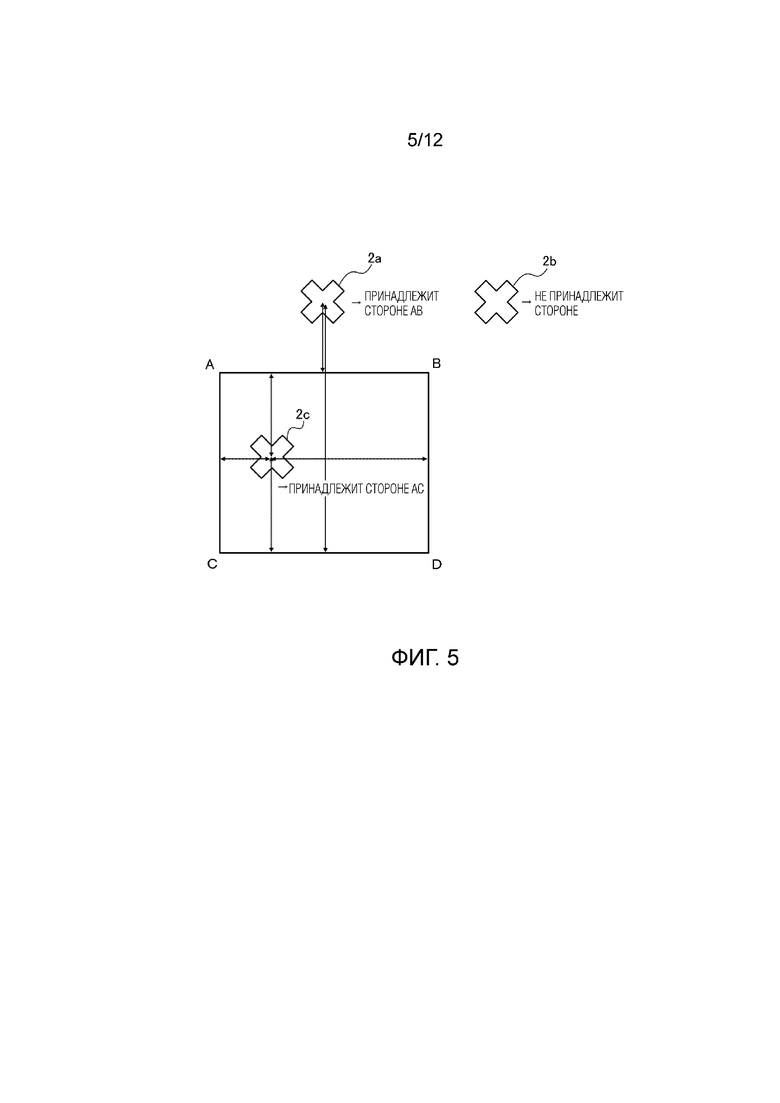
На Фиг.5 показана схема, иллюстрирующая пример способа определения принадлежности точек отражения аппроксимационному многоугольнику.
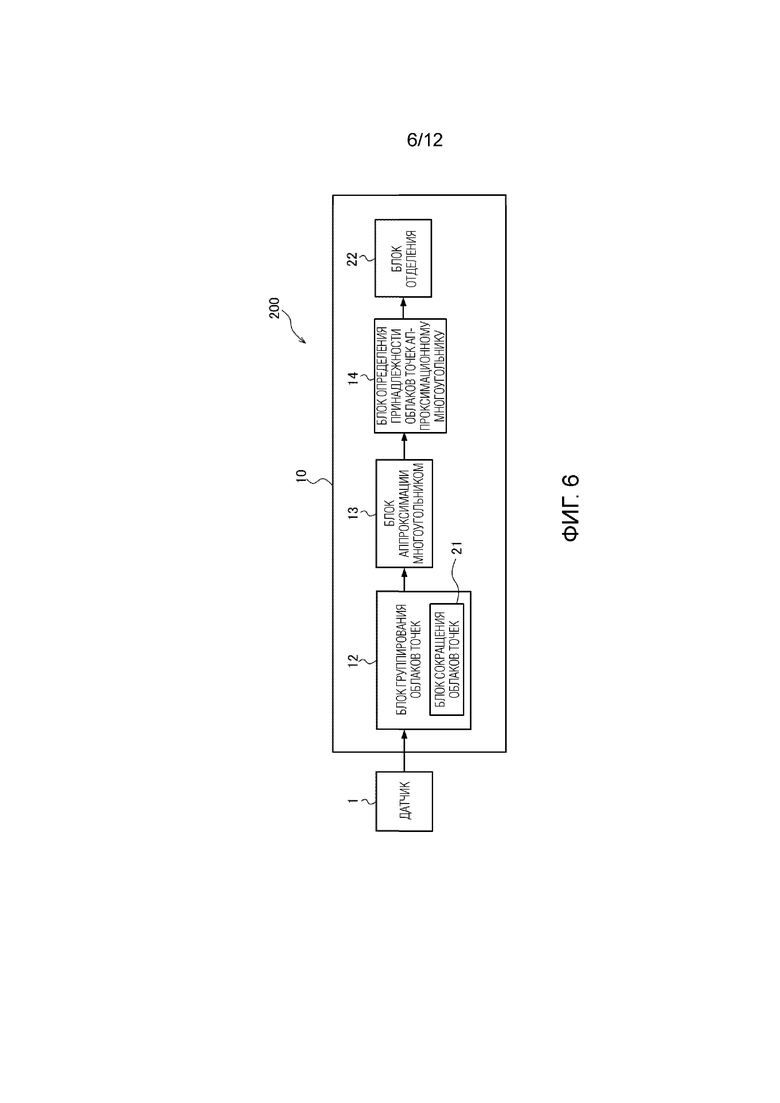
На Фиг.6 показана блок-схема, иллюстрирующая пример конфигурации устройства распознавания объектов согласно второму варианту осуществления.
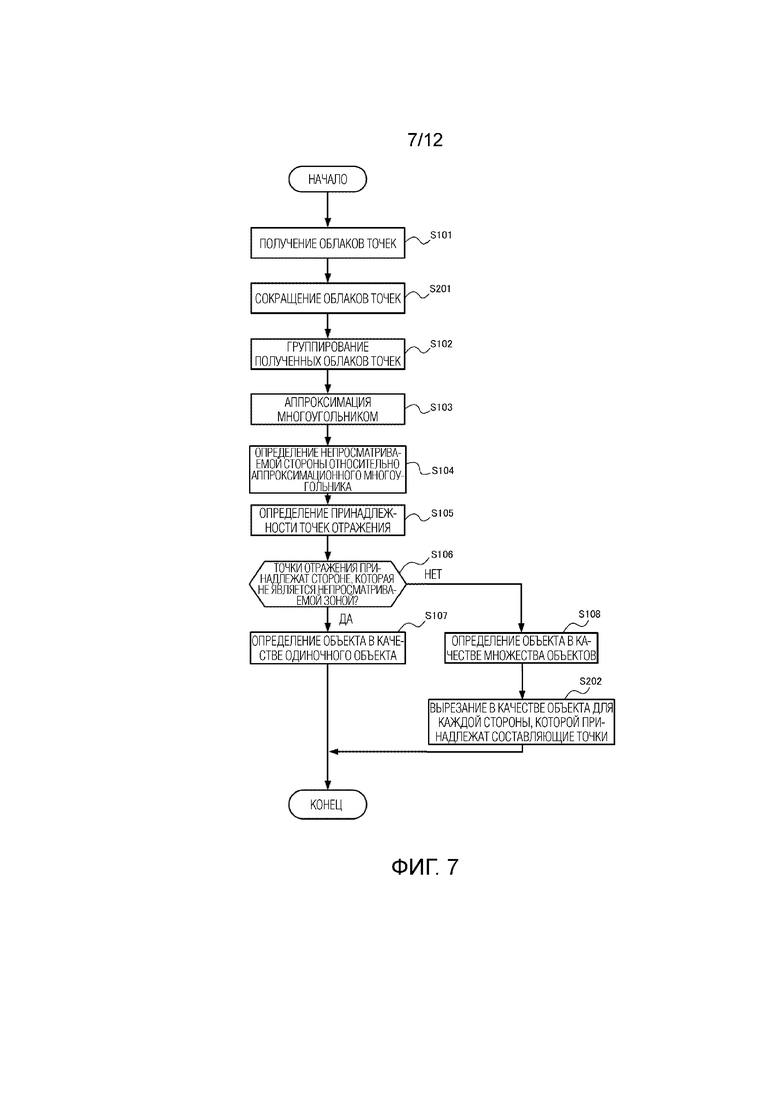
На Фиг.7 показана блок-схема последовательности операций, иллюстрирующая способ распознавания объектов устройством распознавания объектов согласно второму варианту осуществления.
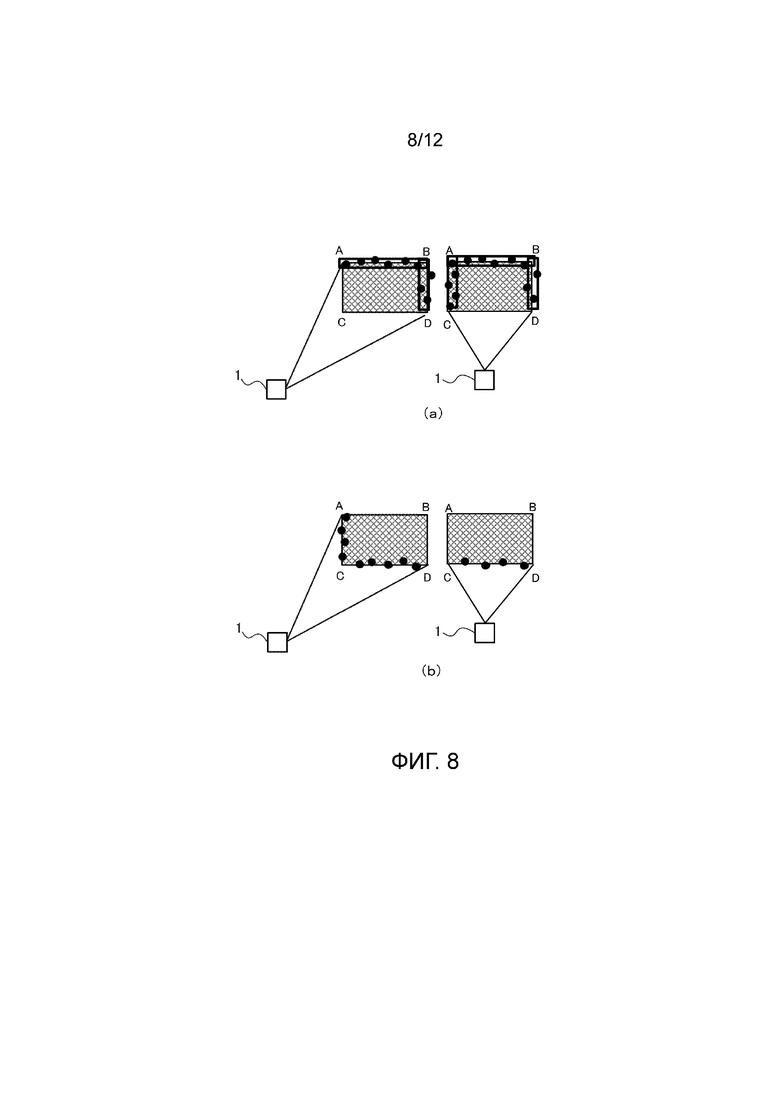
На Фиг.8 показана блок-схема последовательности операций, иллюстрирующая способ распознавания объектов устройством распознавания объектов согласно второму варианту осуществления.
На Фиг.9 показана блок-схема, иллюстрирующая пример конфигурации устройства распознавания объектов согласно третьему варианту осуществления.
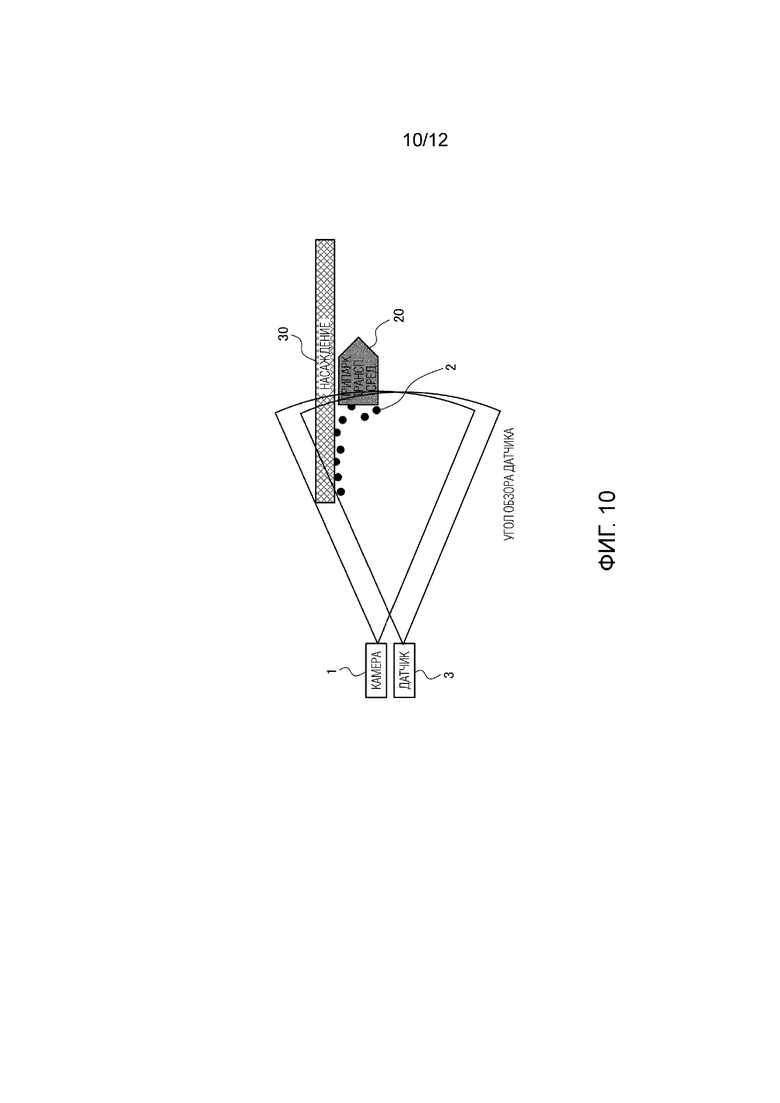
На Фиг.10 показана схема, иллюстрирующая информацию об объекте, существующем в окружающем пространстве, полученную устройством распознавания объектов, включающего в себя датчик и камеру.
На Фиг.11 показана блок-схема последовательности операций, иллюстрирующая способ распознавания объектов устройством распознавания объектов согласно третьему варианту осуществления.
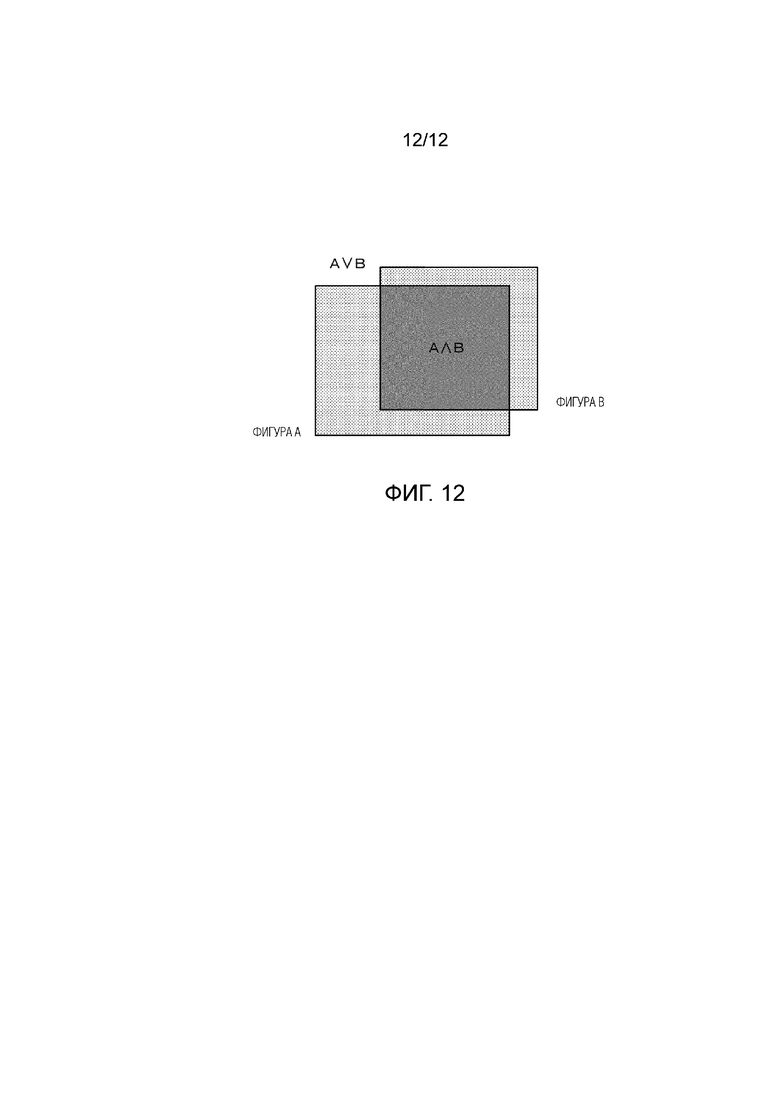
На Фиг.12 показана схема, иллюстрирующая способ определения, совпадает ли или нет информация об объекте, полученная датчиком, с информацией об объекте, полученной камерой.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] <Первый вариант осуществления>
На Фиг.1 показана блок-схема, иллюстрирующая пример конфигурации устройства 100 распознавания объектов согласно первому варианту осуществления настоящего изобретения. Устройство 100 распознавания объектов в этом варианте осуществления применяется, например, к автомобилю.
[0009] Устройство 100 распознавания объектов в этом варианте осуществления включает в себя датчик 1 и контроллер 10, который обрабатывает информацию, полученную датчиком 1. Контроллер 10 включает в себя блок 11 группирования облаков точек, блок 12 аппроксимации многоугольником и блок 13 определения принадлежности облаков точек аппроксимационному многоугольнику.
[0010] Датчик 1 действует как блок получения трехмерных облаков точек, который получает данные трехмерных облаков точек окружающего пространства датчика 1, то есть объекта, существующего в окружающем пространстве транспортного средства, на котором установлено устройство 100 распознавания объектов согласно данному варианту осуществления. Предполагается, что датчик 1 является, например, датчиком обнаружения света и дальности (лидаром (LiDAR)), радаром или стереокамерой, и лидар принят в качестве датчика 1 в этом варианте осуществления. Полученные данные трехмерных облаков точек (в дальнейшем именуемые просто «облака точек») вводятся в контроллер 10. Пример полученных облаков точек будет описан позже со ссылкой на Фиг.2.
[0011] Контроллер 10 включает в себя, например, центральный блок обработки (CPU), постоянное запоминающее устройство (ROM), запоминающее устройство произвольного доступа (RAM) и интерфейс ввода/вывода (I/O interface). ROM, включенное в контроллер 10, хранит программу для исполнения каждой функции каждого функционального блока, описанного ниже. Другими словами, контроллер 10 реализует функции блока 11 группирования облаков точек, блока 12 аппроксимации многоугольником и блока 13 определения принадлежности облаков точек аппроксимационному многоугольнику, описанных ниже, посредством исполнения различных программ, хранящихся в ROM.
[0012] Блок 11 группирования облаков точек проецирует облака точек, полученные датчиком 1, на двумерную плоскость, параллельную земле, и группирует облака точек согласно близости облаков точек. В качестве такого способа группирования в этом варианте осуществления используется способ, называемый евклидовой кластеризацией, но способ не ограничивается этим способом, и может использоваться другой способ группирования согласно близости облаков точек.
[0013] Блок 12 аппроксимации многоугольником выполняет так называемую аппроксимацию многоугольником, в которой облака точек, сгруппированные блоком 11 группирования облаков точек, аппроксимируются до предварительно определенного многоугольника.
[0014] Блок 13 определения принадлежности облаков точек аппроксимационному многоугольнику определяет на основе позиционного отношения между датчиком 1 и аппроксимационным многоугольником, аппроксимированным блоком 12 аппроксимации многоугольником, являются ли или нет стороны, соответствующие сгруппированным облакам точек, среди сторон, составляющих аппроксимационный многоугольник, непросматриваемыми ("слепыми") зонами при просмотре с датчика 1. Когда блок 13 определения принадлежности облаков точек аппроксимационному многоугольнику определил, что стороны, соответствующие сгруппированным облакам точек, являются непросматриваемыми зонами при просмотре с датчика 1, затем определяет, что облака точек, соответствующие сторонам, принадлежат множеству объектов (множественными объектами) и распознает, что облака точек указывают положения множества объектов. Между тем, когда блок 13 определения принадлежности облаков точек аппроксимационному многоугольнику определил, что стороны, соответствующие сгруппированным облакам точек, не являются непросматриваемой зоной при просмотре с датчика 1, затем определяет, что облака точек, составляющие стороны, принадлежат одному объекту (одиночному объекту), и распознает, что облака точек указывают положение одиночного объекта, соответствующего аппроксимационному многоугольнику, сгенерированному посредством аппроксимации многоугольником.
[0015] С такой конфигурацией устройство 100 распознавания объектов может определять, указывает ли объект, указанный полученными облаками точек, одиночный объект или множество объектов.
[0016] Далее подробности способа определения того, указывают ли полученные облака точек одиночный объект или множество объектов, будут описаны со ссылкой на Фиг.2 и 3.
[0017] На Фиг.2 показана схема, иллюстрирующая пример облаков точек, полученных устройством 100 распознавания объектов. В примере, показанном на Фиг.2, показана ситуация, в которой транспортное средство 20 припарковано рядом с насаждением 30 на обочине дороги (около границы между дорогой и тротуаром) перед транспортным средством, на котором установлен датчик 1. Веерообразная линия, идущая от датчика 1, указывает угол обзора датчика 1, а направление, в котором угол обзора расширяется при просмотре с датчика 1, является передней частью транспортного средства.
[0018] Здесь датчик 1, принятый в качестве блока получения трехмерных облаков точек в этом варианте осуществления, представляет собой лидар или датчик, который выводит лазерные лучи (волны излучения) во множество направлений в пределах угла обзора и обнаруживает лазерные лучи (отраженные волны), которые ударяются и отражаются на множестве точек отражения на поверхности объекта, существующего в угле обзора, а затем получает относительные положения относительно датчика 1 множества точек 2 отражения (в дальнейшем называемых просто точками 2 отражения), соответствующие положениям боковой поверхности объекта на стороне датчика 1. Устройство 100 распознавания объектов распознает положение объекта, существующего в окружающем пространстве устройства 100 распознавания объектов, на основе облаков точек, включающих в себя множество точек обнаружения, которые получены как множественные точки 2 отражения с использованием датчика 1.
[0019] Датчик 1 может быть любым датчиком при условии, что он может получать положение поверхности объекта в виде облака точек в пределах угла обзора, и не ограничивается радаром или лидаром. Датчик 1 может быть, например, стереокамерой. То есть устройство 100 распознавания объектов может вычислять положение поверхности объекта для каждого пикселя, соответствующего объекту, существующему в пределах предварительно определенного угла обзора (обзорного угла), изображаемого, например, стереокамерой, и распознавать положение объекта, существующего в окружающем пространстве устройства 100 распознавания объектов, на основе облаков точек, имеющих положения, соответствующие каждому пикселю в качестве точек обнаружения.
[0020] В нижеследующем описании предполагается, что датчик 1, принятый в качестве блока обнаружения трехмерной группы точек, является лидаром или радаром.
[0021] Здесь, в сцене, показанной на Фиг.2, в результате группирования облаков точек, полученных датчиком 1, согласно близости облаков точек, облака точек на боковой поверхности насаждения 30 на стороне датчика 1 и облака точек на задней части припаркованного транспортного средства 20 могут быть сгруппированы вместе. То есть, в действительности, облака точек, соответствующие множеству объектов, включающие в себя насаждение 30 и припаркованное транспортное средство 20, могут быть сгруппированы вместе в качестве облаков точек, соответствующих одному объекту (одиночному объекту). Таким образом, в предшествующем уровне техники аппроксимация прямоугольником как аппроксимация многоугольником выполняется на основе облаков точек, сгруппированных как одиночный объект, в результате генерируется точечный прямоугольный аппроксимационный многоугольник (аппроксимационный прямоугольник), показанный на Фиг.2. Когда такой аппроксимационный прямоугольник сгенерирован, то распознается, что одиночный объект, соответствующий аппроксимационному прямоугольнику, существует в том положении, где сгенерирован аппроксимационный прямоугольник. Однако положение, в котором формируется аппроксимационный прямоугольник, в действительности является полостью, образованной посредством размещения множества объектов насаждения 30 и припаркованного транспортного средства 20 в L-образной форме, и, таким образом, существует проблема, заключающаяся в том, что положение объекта, распознанного посредством аппроксимационного прямоугольника, полученного посредством аппроксимации многоугольником, и положения реальных объектов отличаются друг от друга.
[0022] В этом варианте осуществления, чтобы не вызывать такого различия, определяется, являются ли или нет облака точек, полученные посредством датчика 1, облаками точек, соответствующими множеству объектов. Если можно определить, что облака точек соответствуют множеству объектов, даже если аппроксимационный многоугольник однажды сгенерирован посредством аппроксимации многоугольником, можно правильно распознать, что положение, в котором сгенерирован аппроксимационный многоугольник, представляет собой полость, образованную множеством объектов, и в этом положении нет объекта. Далее будут описаны подробности способа определения того, соответствуют ли или нет облака точек, полученные с использованием датчика 1, множеству объектов.
[0023] Фиг.3 является блок-схемой последовательности операций, иллюстрирующей способ распознавания объектов устройством 100 распознавания объектов согласно данному варианту осуществления. Процессы, проиллюстрированные на блок-схеме последовательности операций, запрограммированы в контроллере 10 таким образом, чтобы они исполнялись постоянно с регулярными интервалами, пока устройство 100 распознавания объектов активировано.
[0024] На этапе S101 контроллер 10 получает облака точек, включающие в себя множество точек 2 отражения, посредством датчика 1. Когда облака точек получены, выполняется процесс на следующем этапе S102.
[0025] На этапе S102 контроллер 10 проецирует облака точек, полученные на этапе S101, на двумерную плоскость, параллельную земле, и группирует облака точек согласно близости облаков точек.
[0026] На этапе S103 контроллер 10 выполняет аппроксимацию многоугольником (подгонку многоугольника) на основе облаков точек, сгруппированных на этапе S102. Многоугольник, аппроксимируемый в этом варианте осуществления, представляет собой четырехугольник (прямоугольник), но может быть треугольником или другим многоугольником. Аппроксимационный многоугольник подбирается так, чтобы ошибка между положениями сторон, составляющих аппроксимационный многоугольник, и положениями облаков точек была наименьшей.
[0027] На этапе S104 контроллер 10 выполняет определение непросматриваемых сторон относительно аппроксимационного многоугольника. При определении непросматриваемых сторон контроллер 10 идентифицирует сторону, которая расположена в непросматриваемой зоне аппроксимационного многоугольника (сторону, которая включает в себя точки 2 отражения, расположенные в непросматриваемой зоне, также называемой ниже непросматриваемой стороной) при просмотре с датчика 1 среди сторон, составляющих аппроксимационный многоугольник, аппроксимированный на этапе S103. Другими словами, идентифицируется сторона аппроксимационного многоугольника, которая не соответствует датчику 1. Подробности способа идентификации стороны, расположенной в непросматриваемой зоне, будут описаны со ссылкой на Фиг.4.
[0028] На Фиг.4 показана схема, иллюстрирующая способ определения непросматриваемых сторон по отношению к аппроксимационному многоугольнику согласно данному варианту осуществления. Прямоугольники, четыре угла которых обозначены на схеме буквами от A до D, представляют собой прямоугольники (аппроксимационные прямоугольники), аппроксимированные на основе облаков точек, полученных на этапе S101.
[0029] На Фиг.4(а) показана схема, иллюстрирующая пример способа определения непросматриваемых сторон по отношению к аппроксимационному многоугольнику. В данном примере сторона, которую может наблюдать датчик 1 (сторона, которая не расположена в непросматриваемой зоне при просмотре с датчика 1 и обращена к датчику 1), сначала идентифицируется на основе соотношения между сторонами, составляющими аппроксимационный прямоугольник, сгенерированный при аппроксимации многоугольником, и датчиком 1, а затем другие стороны идентифицируются как непросматриваемых стороны.
[0030] В частности, сначала идентифицируются точка, ближайшая к датчику 1, и точки по обе стороны от точки, среди точек от A до D четырех углов аппроксимационного прямоугольника, и, следовательно, идентифицируются всего три точки. Затем выбираются две из трех идентифицированных точек и исследуется сочетание двух точек, которое максимизирует угол, образованный линией, соединяющей каждую из выбранных двух точек и датчик 1.
[0031] Со ссылкой на схему на левой стороне на Фиг.4(a), точка, ближайшая к датчику 1, является точкой C, а точки по обе стороны от точки C являются точками A и D. Как показано на схеме, сочетание двух точек, которое максимизирует угол, образованный линией, соединяющей две точки среди трех точек A, C и D и датчик 1, это точки A и D.
[0032] Со ссылкой на схему на правой стороне на Фиг.4(a), ближайшая к датчику 1 точка - это точка C, а точки по обе стороны от точки C - это точки A и D. Как показано на схеме, сочетание двух точек, которое максимизирует угол, образованный линией, соединяющей две точки среди трех точек A, C и D и датчик 1, является точками C и D. Если соответствующие расстояния между точками C и D до датчика 1 одинаковы, и они являются ближайшими точками, то может быть выбрана точка C или точка D.
[0033] Среди сторон, составляющих аппроксимационный прямоугольник, все линейные участки, которые соединяют две точки, выбранные как сочетание двух точек, которое максимизирует угол, и точку, ближайшую к датчику 1, идентифицируются как стороны, которые могут просматриваться датчиком 1, а другие стороны идентифицируются как непросматриваемые стороны. Как показано на схеме слева на Фиг.4(a) просматриваемые стороны обозначены как сторона AC и сторона CD, которые представляют собой стороны, окруженные толстыми сплошными линиями на схеме, а непросматриваемых стороны обозначены как сторона AB и сторона BD, которые являются сторонами, отличными от просматриваемых сторон. Как показано на схеме справа на Фиг.4(a), просматриваемая сторона обозначена как сторона CD, которая представляет собой сторону, окруженную жирными сплошными линиями на схеме, а непросматриваемые стороны идентифицированы как сторона AB, сторона AC и сторона BD, которые являются сторонами, отличными от просматриваемой стороны.
[0034] На Фиг.4(b) показана схема, иллюстрирующая другой пример способа определения непросматриваемых сторон по отношению к аппроксимационному многоугольнику. В данном примере непросматриваемая сторона идентифицируется напрямую без идентификации просматриваемой стороны.
[0035] В частности, выбирается одна из четырех точек от A до D аппроксимационного прямоугольника, когда прямая линия, соединяющая выбранную точку и датчик 1, пересекает стороны, отличные от сторон, соединенных с выбранной точкой, то стороны, соединенные с выбранной точкой, идентифицируются как непросматриваемые стороны. Изучив все точки от A до D, можно идентифицировать непросматриваемые стороны со всех сторон, составляющих аппроксимационный прямоугольник.
[0036] Со ссылкой на схему слева на Фиг.4(b) прямая линия, соединяющая точку B и датчик 1, пересекает сторону CD, которая является стороной, отличной от стороны AB и стороны BD, соединенными с точкой B, и, таким образом, сторона AB и сторона BD, которые являются сторонами, соединенными с точкой B и окруженными жирными сплошными линиями на схеме, обозначаются как стороны непросматриваемой зоны.
[0037] Со ссылкой на схему с правой стороны на Фиг.4(b) прямая линия, соединяющая точку A и датчик 1, пересекает сторону CD, которая является стороной, отличной от стороны AB и стороны AC, соединенных с точкой A, и, таким образом, сторона AB и сторона AC, которые являются сторонами, соединенными с точкой A и окруженными жирными сплошными линиями на схеме, идентифицируются как непросматриваемые стороны. Кроме того, прямая линия, соединяющая точку B и датчик 1, пересекает сторону CD, которая является стороной, отличной от стороны AB и стороны BD, соединенных с точкой B, и, таким образом, сторона AB и сторона BD, соединенные с точкой B, также идентифицируются как непросматриваемые стороны. Следует отметить, что способ, описанный со ссылкой на Фиг.4(b), может применяться не только к прямоугольному аппроксимационному прямоугольнику, но также и ко всем другим многоугольным формам.
[0038] Таким образом, когда идентифицируются стороны, которые расположены в непросматриваемых зонах при просмотре с датчика 1 среди сторон, составляющих аппроксимационный прямоугольник, выполняется процесс на следующем этапе S105 (см. Фиг.3).
[0039] На этапе S105 контроллер 10 выполняет определение принадлежности точек отражения аппроксимационному многоугольнику. При определении принадлежности точек отражения аппроксимационному многоугольнику контроллер 10 определяет, какой стороне из сторон, составляющих аппроксимационный прямоугольник, соответствуют (принадлежат) множественные точки 2 отражения, составляющие облака точек, которые являются основаниями аппроксимационного прямоугольника, сгенерированного посредством аппроксимации многоугольником. Более конкретно, контроллер 10 определяет, принадлежат ли или нет множественные точки 2 отражения, составляющие облака точек, полученные на этапе S101, стороне, которая не является непросматриваемой стороной (стороной, которую может просматриваться датчиком 1), указанной на этапе S104. Способ определения стороны, которой принадлежат точки 2 отражения, будет описан со ссылкой на Фиг.5.
[0040] На Фиг.5 показана схема, иллюстрирующая пример способа определения принадлежности точек отражения аппроксимационному многоугольнику согласно данному варианту осуществления. Прямоугольник, представленный четырьмя угловыми точками от A до D, указывает аппроксимационный прямоугольник, аппроксимированный на этапе S103. Точки 2a, 2b и 2c отражения указывают часть множества точек 2 отражения, составляющих группы точек, полученные на этапе S101. При определении принадлежности точек отражения аппроксимационному многоугольнику на основе части множества точек 2 отражения, составляющих полученные группы точек, определяется, какой стороне из сторон, составляющих аппроксимационный прямоугольник, принадлежат облака точек, образованные точками 2 отражения.
[0041] В настоящем примере сначала проводятся перпендикулярные линии от точек 2 отражения к сторонам, составляющим аппроксимационный прямоугольник. В этом случае, когда невозможно провести перпендикулярные линии от точек 2 отражения к сторонам, составляющим аппроксимационный прямоугольник, определяется, что нет стороны, которой принадлежат точки 2 отражения. Между тем, когда есть пересечения между перпендикулярными линиями, проведенными из точек 2 отражения, и сторонами аппроксимационного прямоугольника, определяется, что точки 2 отражения принадлежат стороне, чье расстояние от точек 2 отражения до пересечений является наименьшим среди сторон, где существуют пересечения.
[0042] Со ссылкой на Фиг.5, например, в точке 2а отражения можно провести перпендикулярные линии к стороне AB и стороне CD. На двух перпендикулярных линиях, проведенных из точки 2а отражения, сторона, на которой существует пересечение с перпендикулярной линией, имеющей минимальную длину, является стороной AB. Таким образом, определяется, что точка 2a отражения принадлежит стороне AB.
[0043] Поскольку точка 2b отражения не может иметь перпендикулярную линию, проведенную к какой-либо стороне, то определяется, что сторона, которой принадлежит точка отражения, не существует.
[0044] От точки 2c отражения можно провести перпендикулярные линии ко всем сторонам, но среди этих перпендикулярных линий существует пересечение с перпендикулярной линией, имеющей наименьшую длину, к стороне AC. Следовательно, точка отражения 2c определяется как принадлежащая стороне AC.
[0045] Таким образом, можно определить, какой стороне из сторон, составляющих аппроксимационный прямоугольник, принадлежат точки 2 отражения, составляющие облака точек, полученные на этапе S101. Когда определяется сторона, которой принадлежат точки 2 отражения, выполняется процесс на следующем этапе S106.
[0046] На этапе S106 контроллер 10 определяет, принадлежат ли или нет точки 2 отражения, составляющие облака точек, полученные на этапе S101, стороне, которая не расположена в непросматриваемой зоне при просмотре с датчика 1, среди сторон, составляющих аппроксимационный прямоугольник. То есть контроллер 10 определяет, является ли или нет сторона, определенная на этапе S105, которой принадлежат точки 2 отражения, стороной (просматриваемой стороной), отличной от непросматриваемых сторон. Когда определено, что точки 2 отражения, принадлежащие стороне, отличной от непросматриваемых сторон, существуют среди множества точек 2 отражения, составляющих облака точек, полученные на этапе S101, определяется, что точки 2 отражения не расположены в непросматриваемых зонах аппроксимационного прямоугольника относительно датчика 1, а затем выполняется процесс на этапе S107. Между тем, когда определено, что нет точек 2 отражения, принадлежащих стороне, отличной от непросматриваемых сторон, то есть когда определено, что точки 2 отражения принадлежат непросматриваемых сторонам, определяется, что точки 2 отражения расположены в непросматриваемых зонах аппроксимационного прямоугольника относительно датчика 1, и затем выполняется процесс на этапе S108.
[0047] На этапе S107 определяется, что точки 2 отражения, составляющие полученные облака точек, принадлежат стороне, которая не расположена в непросматриваемой зоне, и, таким образом, контроллер 10 определяет, что точки 2 отражения не расположены в непросматриваемых зонах аппроксимационного прямоугольника относительно датчика 1, и определяет, что объект, указанный облаками точек, полученными на этапе S101, является одиночным объектом. В результате устройство 100 распознавания объектов распознает, что объект, имеющий внешнюю форму, соответствующую аппроксимационному прямоугольнику, фактически существует на виде сверху в положении аппроксимационного прямоугольника, сгенерированного посредством аппроксимации многоугольником, на основе облаков точек, полученных на этапе S101.
[0048] Между тем, на этапе S108 определяется, что точки 2 отражения, составляющие полученные облака точек, принадлежат непросматриваемым сторонам, и, таким образом, контроллер 10 определяет, что точки 2 отражения расположены в непросматриваемой зоне аппроксимационного прямоугольника относительно датчика 1, и определяет, что объект, указанный облаками точек, полученными на этапе S101, является множеством объектов. В результате устройство 100 распознавания объектов распознает, что фактическое местоположение, соответствующее положению, в котором аппроксимационный прямоугольник генерируется посредством аппроксимации многоугольником на основе облаков точек, полученных на этапе S101, является полостью, образованной множеством объектов (например, в примере, показанном на фиг.2, насаждение 30 и припаркованное транспортное средство 20), и объект, соответствующий аппроксимационному прямоугольнику, в действительности не существует.
[0049] Когда посредством вышеупомянутых процессов определяется, сконфигурирован ли объект, указанный облаками точек, с помощью точек 2 отражения одиночного объекта или точек отражения 2 множества объектов, контроллер 10 завершает последовательность процессов, связанных с распознаванием объектов.
[0050] Кроме того, следует отметить, что не всегда необходимо выполнять процесс для определения, какой стороне аппроксимационного многоугольника принадлежат точки 2 отражения, составляющие полученные облака точек (процессы после этапа S104), после выполнения аппроксимации многоугольником. Например, когда объект, указанный облаками точек, представляет собой удлиненный объект, может быть трудно определить сторону, которой принадлежат облака точек. Например, удлиненный объект, существующий на обочине дороги, может не иметь большого влияния на движение транспортного средства и им можно пренебречь. Следовательно, процессы после этапа S104 могут выполняться только тогда, когда длина самой короткой стороны среди сторон, составляющих аппроксимационный многоугольник, равна или больше предварительно определенного значения. В результате процессы после этапа S104 выполняются только для объектов, отличных от удлиненного объекта, сторону которого, которой принадлежат точки 2 отражения, трудно определить, или для удлиненного объекта, который настолько удлинен, что его не нужно распознавать, и таким образом, можно уменьшить вычислительную нагрузку.
[0051] Посредством отслеживания полученные облака точек во временном ряду можно идентифицировать атрибут объекта, указанного облаками точек, на основе характера движения облаков точек. Более конкретно, например, посредством измерения положения объекта, существующего в окружающем пространстве, во временном ряду с использованием так называемой техники отслеживания временных рядов, можно добавить атрибут к объекту, указанному облаками точек на основе размера и характера движения облаков точек. В этом случае, когда объект может быть четко идентифицирован как одиночный объект на основе атрибута объекта, указанного облаками точек, процессы после этапа S104 могут быть опущены. В результате процессы после этапа S104 выполняются только тогда, когда объект, указанный облаками точек, не может быть четко определен как одиночный объект, и, таким образом, вычислительная нагрузка может быть уменьшена.
[0052] Как описано выше, посредством выполнения процессов, описанных со ссылкой на Фиг.3, устройство 100 распознавания объектов в этом варианте осуществления может надлежащим образом определить, правильно ли аппроксимационный многоугольник, сгенерированный посредством аппроксимации многоугольником в отношении сгруппированных облаках точек, указывает положение фактического объекта, или аппроксимационный многоугольник не указывает фактический объект, и действительно ли имеется полость, образованная множеством объектов, и тогда аппроксимационный многоугольник не правильно указывает положение фактического объекта. В результате, когда выполняется аппроксимация многоугольником на основе облаков точек, полученных посредством распознавания положения объекта, существующего в окружающем пространстве, можно надежно определить, является ли или нет сгенерированный аппроксимационный многоугольник результатом, который указывает положение фактического объекта правильно.
[0053] Между тем, когда определяется, является ли объект, указанный облаками точек, полученными посредством датчика 1, одиночным объектом или множеством объектов, не всегда необходимо выполнять аппроксимацию многоугольником на основе облаков точек. Например, когда расстояния между множеством соответствующих точек 2 отражения, составляющих облака точек, и датчиком 1 могут быть обнаружены с высокой точностью, устройство 100 распознавания объектов может определить без выполнения аппроксимации многоугольником, что множество точек 2 отражения, которые составляют облака точек при выполнении аппроксимации многоугольником находятся в непросматриваемых зонах аппроксимационного многоугольника. В результате он может определить, включает ли в сея или нет объект, указанный облаками точек, множество объектов. Более конкретно, когда есть точки 2 отражения ближе к датчику 1 по обе стороны от точек 2 отражения, наиболее удаленных от датчика 1 среди множества точек 2 отражения, составляющих полученные облака точек, устройство 100 распознавания объектов определяет без выполнения аппроксимации многоугольником, что точки 2 отражения расположены в непросматриваемых зонах аппроксимационного многоугольника, если аппроксимация многоугольником выполняется в отношении облаков точек, а затем определяется, что множество объектов указаны облаками точек. Кроме того, когда есть точки 2 отражения дальше от датчика 1 по обе стороны от точек 2 отражения, ближайших к датчику 1, устройство 100 распознавания объектов может быть выполнено с возможностью определения без выполнения аппроксимации многоугольником, что точки 2 отражения не расположены в непросматриваемых зонах аппроксимационного многоугольника, если аппроксимация многоугольником выполняется в отношении облаков точек, и затем может определить, что объект, указанный облаками точек, является одиночным объектом. Однако обычно ошибка измерения возникает в расстояниях между множеством соответствующих точек 2 отражения и датчиком 1, и, таким образом, исходя из результата, полученного посредством аппроксимации многоугольником в отношении облаков точек, как описано выше, предпочтительно определить, является ли объект, указанный облаками точек, одиночным объектом или множеством объектов в ответ на определение того, расположены ли или нет точки 2 отражения в непросматриваемой зоне аппроксимационного многоугольника.
[0054] Как описано выше, устройство 100 распознавания объектов в первом варианте осуществления выполняет способ распознавания объектов, используя датчик 1, который получает положение объекта, существующего в окружающем пространстве, в качестве облаков точек, включающих в себя множество точек 2 отражения (точек обнаружения) на виде сверху. Способ включает в себя группирование облаков точек согласно близости; и определение при выполнении аппроксимации многоугольником в отношении сгруппированных облаков точек, расположена ли или нет, по меньшей мере, часть точек обнаружения, составляющих сгруппированные облака точек, в непросматриваемой зоне аппроксимационного многоугольника, полученного посредством аппроксимации многоугольником в отношении облаков точек относительно датчика; распознавание сгруппированных облаков точек в качестве облаков точек, соответствующих множеству объектов, когда определено, что точки обнаружения расположены в непросматриваемой зоне относительно датчика; и распознавание сгруппированных облаков точек в качестве облаков точек, соответствующих одиночному объекту аппроксимационного многоугольника, когда определено, что точки обнаружения не расположены в непросматриваемой зоне относительно датчика. Следовательно, можно определить, существует ли или нет в действительности объект, который указан аппроксимационным многоугольником, полученным посредством аппроксимации многоугольником в отношении сгруппированных облаков точек. Поскольку можно определить, что объект, указанный сгруппированными облаками точек, является множеством объектов, можно правильно распознать, что сгруппированные облака точек являются облаками точек, соответствующими полости, образованной множеством объектов, и что объект отсутствует в рассматриваемом положении.
[0055] Когда длина самой короткой стороны из сторон, составляющих аппроксимационный многоугольник, больше, чем предварительно определенное значение, устройство 100 распознавания объектов в первом варианте осуществления определяет, соответствует ли или нет, по меньшей мере, часть точек 2 отражения, составляющих облака точек, стороне, которая расположена в непросматриваемой зоне относительно датчика 1, среди сторон, составляющих аппроксимационный многоугольник. Таким образом, можно определить, расположены ли или нет точки 2 отражения (точки обнаружения) в непросматриваемой зоне только для объектов, отличающихся от удлиненного объекта, сторону которого, которой принадлежат облака точек, трудно определить, или удлиненного объекта, который настолько вытянут, что его не нужно распознавать, и, таким образом, вычислительная нагрузка может быть уменьшена.
[0056] Устройство 100 распознавания объектов в первом варианте осуществления измеряет положение объекта, существующего в окружающем пространстве, во временном ряду, идентифицирует атрибут объекта, измеренный во временном ряду, и когда сгруппированные облака точек соответствуют объекту, атрибут которого не идентифицирован, определяет, расположена ли или нет, по меньшей мере, часть точек 2 обнаружения, составляющих облака точек, в непросматриваемой зоне аппроксимационного многоугольника относительно датчика 1. В результате можно определить, расположены ли или нет точки 2 отражения в непросматриваемой зоне аппроксимационного многоугольника, только когда объект, указанный облаками точек, не может быть четко идентифицирован как одиночный объект, и, таким образом, вычислительная нагрузка можно быть уменьшена.
[0057] <Второй вариант осуществления>
Далее будет описано устройство 200 распознавания объектов согласно второму варианту осуществления настоящего изобретения.
[0058] На Фиг.6 показана блок-схема, иллюстрирующая пример конфигурации устройства 200 распознавания объектов согласно данному варианту осуществления. Устройство 200 распознавания объектов отличается от устройства 100 распознавания объектов в первом варианте осуществления тем, что дополнительно предусмотрены блок 21 сокращения облаков точек и блок 22 отделения.
[0059] Блок 21 сокращения облаков точек сокращает количество облаков точек (количество точек 2 отражения), получаемых датчиком 1.
[0060] Когда определено, что объект, указанный полученными облаками точек, включает в себя множество объектов, блок 22 отделения распознает множество сторон, составляющих аппроксимационный многоугольник, аппроксимированный на основе облаков точек, как множество объектов, соответственно. Процессы, выполняемые блоком 21 сокращения облаков точек и блоком 22 отделения, будут описаны со ссылкой на Фиг.7.
[0061] Фиг.7 является блок-схемой последовательности операций, иллюстрирующей способ распознавания объектов устройством 200 распознавания объектов согласно данному варианту осуществления. Процессы, проиллюстрированные на блок-схеме последовательности операций, запрограммированы в контроллере 10 таким образом, чтобы они исполнялись постоянно с регулярными интервалами, пока устройство 200 распознавания объектов активировано. Он отличается от способа распознавания объектов в первом варианте осуществления, описанном выше со ссылкой на Фиг.3, на котором добавляются этап S201 и этап S202. В дальнейшем в этом документе в основном будет описано отличие от первого варианта осуществления, а описания тех же этапов, что и в первом варианте осуществления, будут опущены.
[0062] На этапе S201 контроллер 10 сокращает облака точек, полученные на этапе S101. Способ сокращения конкретно не ограничивается, и, например, может использоваться воксельный фильтр. Посредством сокращения облаков точек на данном этапе можно уменьшить вычислительную нагрузку последующих процессов, выполняемых на основе облаков точек. Если нет необходимости уменьшать вычислительную нагрузку, нет необходимости выполнять этот процесс на этапе S101, который не является необходимым процессом.
[0063] Этап S202 - это процесс, выполняемый, когда определено, что объект, указанный полученными облаками точек, включает в себя множество объектов. Контроллер 10 отделяет каждую сторону, которой принадлежат точки 2 отражения, то есть каждую сторону непросматриваемой зоны, от сторон, составляющих аппроксимационный прямоугольник. Контроллер 10 выполняет процесс вырезания и распознавания (отделения и распознавания) каждой непросматриваемой стороны. То есть контроллер 10 распознает, что точки 2 отражения, соответствующие каждой непросматриваемой стороне, являются точками 2 отражения, соответствующими одиночному объекту. Подробности способа вырезания и распознавания объектов на основе сторон непросматриваемой зоны (способ отделения объектов) будут описаны со ссылкой на Фиг.8. Для простоты в нижеследующем описании вопрос о том, что точки 2 отражения распознаются как точки 2 отражения, соответствующие одиночному объекту для каждой непросматриваемой стороны, выражается как «вырезание» или «отделение объекта».
[0064] На Фиг.8 показана схема, иллюстрирующая способ отделения объектов, выполняемый устройством 200 распознавания объектов, согласно варианту осуществления. Прямоугольники, четыре угла которых обозначены на схеме буквами от A до D, являются прямоугольниками (аппроксимационными четырехугольниками), которые аппроксимируются в прямоугольники на основе облаков точек, полученных на этапе S101.
[0065] На Фиг.8(a) показана схема, иллюстрирующая способ отделения объектов, выполняемый, когда определено, что объект, указанный облаками точек, включает в себя множество объектов. Как описано со ссылкой на Фиг.4, в первом варианте осуществления, на этапе S106 идентифицируется, что точки 2 отражения, составляющие облака точек, принадлежат непросматриваемым сторонам, а затем определяется, что объект, указанный облаками точек, включает в себя множество объектов.
[0066] Согласно отделению объектов в этом варианте осуществления, точки 2 отражения, соответствующие непросматриваемым сторонам, распознаются как точки 2 отражения, соответствующие одиночному объекту для каждой непросматриваемой стороны, которой принадлежат точки 2 отражения. Например, на схеме слева на Фиг.8(a), посредством отделения объектов, для каждой непросматриваемой стороны (стороны AB и стороны BD), которой принадлежат точки 2 отражения, точки 2 отражения, соответствующие каждой непросматриваемой стороне, вырезаются как два прямоугольных одиночных объекта (каждый объект имеет форму, показанную толстой рамкой на схеме) в соответствии с распределением облаков точек. В качестве другого примера на схеме справа на Фиг.8(b), посредством отделения объектов для каждой непросматриваемой стороны (стороны AB, стороны AC и стороны BD), которой принадлежат точки 2 отражения, точки 2 отражения, соответствующие каждой непросматриваемой стороне, вырезаются в виде трех прямоугольных одиночных объектов (каждый объект имеет форму, показанную на схеме толстой рамкой) в соответствии с распределением облаков точек. Эти вырезанные четырехугольные одиночные объекты (в дальнейшем просто прямоугольные объекты) соответствуют положению фактического объекта, существующего в окружающем пространстве, и, таким образом, устройство 200 распознавания объектов может более правильно распознавать положение объекта, существующего в окружающем пространстве, на основе прямоугольных объектов. Например, когда схема слева на Фиг.8(а) является результатом обнаружения окружающего пространства, показанной на Фиг.2, прямоугольный объект, относящийся к стороне AB, соответствует насаждению 30, а прямоугольный объект, относящийся к стороне BD, соответствует задней части припаркованного транспортного средства 20.
[0067] Как показано на Фиг.8(а), не всегда необходимо вырезать все непросматриваемые стороны, которым принадлежат точки 2 отражения, и часть по меньшей мере одной или более непросматриваемых сторон может быть вырезана в качестве заданных сторон. В этом случае, например, сторона, имеющая большое количество точек 2 отражения, принадлежащих непросматриваемой стороне, или сторона, имеющая большой коэффициент количества точек 2 отражения в соответствии с длиной непросматриваемой стороны, может быть предпочтительно вырезана в качестве заданной стороны.
[0068] Когда определено, что объект существует в окружающем пространстве устройства 200 распознавания объектов, можно использовать не только датчик 1, но также по меньшей мере один или более других датчиков, отличных от датчика 1, и объект, существующий в окружающем пространстве, может быть одновременно обнаружен посредством множества датчиков. В этом случае, только когда объект, обнаруженный датчиком 1, совпадает с объектом, обнаруженным другими датчиками, отличными от датчика 1, то совпадающий объект может быть распознан как объект, который действительно существует в окружающем пространстве. В результате положение объекта, существующего в окружающем пространстве, может быть обнаружено с более высокой точностью, чем при использовании только датчика 1.
[0069] Когда устройство 200 распознавания объектов выполнено таким образом, то множество прямоугольных объектов, соответствующих множеству объектов, обнаруженных датчиком 1, генерируется посредством выполнения вышеупомянутого отделения объектов, и, таким образом, можно более легко определять совпадение между объектом, обнаруженным датчиком 1, и объектом, обнаруженным другими датчиками, отличными от датчика 1. Пример способа определения совпадения объектов, обнаруженных множеством датчиков, будет описан позже в описании третьего варианта осуществления.
[0070] На Фиг.8(b) показана схема, иллюстрирующая случай, когда определено, что объект, указанный облаками точек, не является множеством объектов. Как показано на схеме, когда точки 2 отражения принадлежат стороне (просматриваемой стороне), которая не является непросматриваемой стороной, объект, указанный облаками точек, определяется как одиночный объект (этап S107), и, таким образом, отделение объектов не выполняется.
[0071] Как описано выше, согласно устройству 200 распознавания объектов во втором варианте осуществления, когда объект распознается как множество объектов, каждая сторона, соответствующая точкам 2 отражения, среди сторон, составляющих аппроксимационный многоугольник, распознается как одиночный объект. Таким образом, можно правильно распознать положение объекта, существующего в окружающем пространстве.
[0072] Согласно устройству 200 распознавания объектов во втором варианте осуществления, сторона, распознаваемая как одиночный объект, определяется согласно количеству соответствующих точек 2 отражения. Следовательно, например, объект, который находится близко к датчику 1 и отражает большее количество лазерных лучей, выходящих из датчика 1, может предпочтительно распознаваться как одиночный объект.
[0073] <Третий вариант осуществления>
Далее будет описано устройство 300 распознавания объектов согласно третьему варианту осуществления настоящего изобретения.
[0074] На Фиг.9 показана блок-схема, иллюстрирующая пример конфигурации устройства 300 распознавания объектов согласно данному варианту осуществления. Устройство 300 распознавания объектов отличается от устройства 200 распознавания объектов во втором варианте осуществления тем, что дополнительно предусмотрены камера 3, блок 32 определения атрибутов и блок 33 объединения информации. Далее в основном будет описано отличие от второго варианта осуществления.
[0075] Камера 3 действует как блок получения источника идентификации атрибутов, который получает информацию для определения атрибута объекта, существующего в окружающем пространстве, в блоке 32 определения атрибутов, описанном ниже. Атрибут здесь - это информация, представляющая характеристику объекта, которая в основном определяется по форме объекта, например, человек (пешеход), автомобиль, ограждение или насаждение. Камера 3 захватывает изображение окружающего пространства и предоставляет захваченные видеоданные (изображения камеры) в блок 32 определения атрибутов в качестве источника идентификации атрибутов. Следует отметить, что конфигурация, принятая в качестве блока получения источника идентификации атрибутов, не ограничивается камерой 3. Блок получения источника идентификации атрибутов может быть другим датчиком, способным получать информацию, которая может идентифицировать атрибут посредством последующих процессов.
[0076] Блок 32 определения атрибутов идентифицирует атрибут каждого объекта, существующего в окружающем пространстве (окружающий объект), на основе изображения камеры, полученного камерой 3, и добавляет идентифицированный атрибут к окружающему объекту.
[0077] Блок 33 объединения информации объединяет окружающий объект, к которому атрибут добавлен блоком 32 определения атрибутов, и информацию об объекте, обнаруженном посредством датчика 1. Подробности процессов, выполняемых соответствующими функциональными блоками, будут описаны со ссылкой на Фиг.10 и 11.
[0078] Сначала сцена, в которой объединяется информация об объекте, полученная датчиком 1 и камерой 3, будет описана со ссылкой на Фиг.10. На Фиг.10 показана схема, иллюстрирующая способ предписания датчику 1 и камере 3 согласно третьему варианту осуществления получать информацию об объекте, существующем в окружающем пространстве.
[0079] Сначала способ предписания датчику 1 получить информацию об объекте, существующем в окружающем пространстве, аналогичен способу, описанному со ссылкой на Фиг.2 в первом варианте осуществления. То есть датчик 1 получает облака точек, соответствующие положению боковой поверхности на стороне датчика 1 объекта, имеющегося в веерообразном угле обзора датчика, проходящем от датчика 1. Облака точек, полученные датчиком 1, идентифицируются как одиночный объект или множество прямоугольных объектов, вырезанных посредством отделения объектов через аппроксимацию многоугольником.
[0080] Как показано на схеме, камера 3 получает изображение окружающего пространства в том же направлении, что и датчик 1. То есть согласно сцене, показанной на Фиг.10, камера 3 получает объект, аналогичный объекту, указанному облаками точек, полученным датчиком 1, то есть изображение камеры, включающее в себя боковую поверхность насаждения 30 и заднюю часть припаркованного транспортного средства 20, в качестве информации об объекте, существующем в окружающем пространстве.
[0081] На Фиг.11 является блок-схемой, иллюстрирующей способ распознавания объектов устройством 300 распознавания объектов согласно данному варианту осуществления. Процессы, проиллюстрированные на блок-схеме, запрограммированы в контроллере 10 таким образом, чтобы они исполнялись постоянно с регулярными интервалами, пока устройство 300 распознавания объектов активировано. Он отличается от способа распознавания объектов во втором варианте осуществления, описанном выше со ссылкой на Фиг.7 тем, что добавлены этапы с S301 по этап S303. В дальнейшем будет в основном описано отличие от второго варианта осуществления, а описания тех же этапов, что и во втором варианте осуществления, будут опущены.
[0082] На этапе S301 контроллер 10 идентифицирует атрибут окружающего объекта на основе изображения, полученного камерой 3.
[0083] На этапе S302 контроллер 10 определяет, совпадает ли или нет информация об объекте, полученная датчиком 1, с информацией об объекте, полученной камерой 3. В этом варианте осуществления совпадение информации определяется на основе степени совпадения информации об объекте.
[0084] Степень совпадения может быть вычислена на основе, например, позиционного отношения между объектом, обнаруженным датчиком 1, и объектом, обнаруженным камерой 3. В частности, например, обнаруживается расстояние от датчика 1 до объекта, существующего в окружающем пространстве, и расстояние от камеры 3 до окружающего объекта, и степень совпадения может быть вычислена на основе разности между расстояниями между соответствующими объектами от датчика 1 и камеры 3. Можно определить, что чем ближе расстояния, тем выше степень совпадения между объектами, обнаруженными датчиком 1 и камерой 3. Когда вычисленная степень совпадения превышает предварительно определенное пороговое значение, определяется, что информация о соответствующих объектах совпадает. В дополнение к такому способу вычисления или вместо него может быть принят другой способ вычисления . Другой способ вычисления степени совпадения будет описан со ссылкой на Фиг.12.
[0085] Фиг.12 является схемой, иллюстрирующей способ определения, совпадает ли или нет информация об объекте, полученная датчиком 1, с информацией об объекте, полученной камерой 3.
[0086] Сначала в изображении камеры, полученном камерой 3, извлекается занятый кадр объекта в изображении камеры (кадр, окружающий внешнюю форму объекта на изображении). Например, когда припаркованное транспортное средство 20, показанное на Фиг.10, показано на изображении, полученном камерой 3, фигура B, которая по существу совпадает с внешней формой задней торцевой поверхности припаркованного транспортного средства 20, выделяется как занятый кадр припаркованного транспортного средства 20, который появляется, когда припаркованное транспортное средство 20 захватывается сзади. Затем атрибут «автомобиль», идентифицированный на этапе S302, присваивается фигуре B.
[0087] Между тем, из информации об объекте, сгенерированном на основе облаков точек, полученных датчиком 1, фигура A извлекается как прямоугольная проекционная рамка, показывающая внешнюю форму объекта при просмотре с горизонтального направления. В частности, когда объект, обозначенный облаками точек, полученными датчиком 1, является одиночным объектом, на этапе S103 аппроксимационный прямоугольник, полученный посредством аппроксимации многоугольником, проецируется на изображение камеры, чтобы сделать аппроксимационный прямоугольник двумерным, тем самым генерируя рисунок A как проекционную рамку. Когда объект, указанный облаками точек, полученными датчиком 1, включает в себя множество объектов, прямоугольный объект, вырезанный посредством отделения объектов, проецируется на изображение камеры и делает его двумерным, тем самым генерируя фигуру A. В изображении камеры, фигура A проецируется в положение и размер, которые по существу совпадают с положением и размером облаков точек, полученных датчиком 1. Однако, поскольку аппроксимационный многоугольник, который является основой фигуры A, является информацией, сгенерированной посредством проецирования аппроксимационного многоугольника на двумерную плоскость, информация о высоте фигуры A не включается. Следовательно, соответствующее постоянное значение устанавливается по отношению к размеру фигуры А в направлении высоты как объект, существующий на дороге. Таким образом, фигура A, сгенерированная на основе облаков точек, полученных датчиком 1, проецируется на изображение камеры, из которого извлекается фигура B.
[0088] На изображении камеры вычисляется совместно используемый диапазон (диапазон совпадения) между фигурой B как занятым кадром изображаемого окружающего объекта и фигурой A как кадром проекции аппроксимационного многоугольника, сгенерированного на основе облаков точек или вырезанного прямоугольного объекта. Когда вычисленный совместно используемый диапазон равен или превышает пороговое значение, то есть когда удовлетворяется следующая формула (1), каждый объект, полученный отдельно датчиком 1 и камерой 3, определяется как совпадающий (тот же самый объект). Пороговое значение соответствующим образом устанавливается с учетом характеристик и т.д. датчика 1 и камеры 3, которое должно приниматься в качестве надежного значения для сопоставления каждого объекта.
[0089] [Формула 1]
(A˄B)/(A˅B) > пороговое значение… (1)
[0090] На этапе S301, когда определено, что информация об объекте, полученная датчиком 1, совпадает с информацией об объекте, полученной камерой 3, и определено, что эти объекты являются одним и тем же объектом, выполняется процесс на следующем этапе S302. Когда приведенная выше формула (1) не удовлетворяется и информация об объекте, полученная датчиком 1, не совпадает с информацией об объекте, полученной камерой 3, заканчивая один цикл потока, то процессы с этапа S101 выполняются повторно.
[0091] На этапе S302 контроллер 10 объединяет информацию об объекте, полученную датчиком 1, и информацию об объекте в изображении камеры, определенную как совпадающую с объектом. Следовательно, атрибут, идентифицированный на основе информации, полученной камерой 3, добавляется к объекту, полученному датчиком 1. В результате количество, точность и надежность информации об объекте, полученной датчиком 1, могут быть улучшены.
[0092] Как описано выше, согласно устройству 300 распознавания объектов в третьем варианте осуществления, блок распознавания (камера 3), отличный от датчика 1, используется для распознавания объекта, существующего в окружающем пространстве, и идентификации атрибута объекта, затем определяется, совпадает ли или нет множество объектов или одиночный объект, распознанные посредством датчика 1, с объектом, распознанным посредством камеры 3. Затем, когда определено, что множество объектов или одиночный объект совпадают с объектом, распознанным посредством блока распознавания, к множеству объектов или одиночному объекту применяется атрибут. В результате к объекту может быть добавлен атрибут, атрибут которого неизвестен только по информации об объекте, полученной датчиком 1. Поскольку атрибут добавляется в ответ на распознавание нескольких объектов одного и того же объекта и определение совпадения объектов, надежность информации об объекте, полученной датчиком 1, может быть повышена.
[0093] Согласно устройству 300 распознавания объектов в третьем варианте осуществления обнаруживается расстояние от датчика 1 до объекта, существующего в окружающем пространстве, обнаруживается расстояние от камеры 3 до объекта, существующего в окружающем пространстве, и определяется, являются ли или нет множество объектов или одиночный объект, распознанные посредством датчика 1, и объект, распознанный посредством камеры 3, одним и тем же объектом на основе расстояния от датчика 1 до объекта и расстояния от камеры 3 до объекта. В результате можно определить, совпадают ли или нет соответствующие объекты, на основе позиционного отношения между объектом, обнаруженным датчиком 1, и объектом, обнаруженным камерой 3.
[0094] Согласно устройству 300 распознавания объектов в третьем варианте осуществления камера 3 получает изображение, включающее в себя объект, существующий в окружающем пространстве, множество объектов или одиночный объект, распознанные датчиком 1, проецируются на изображение, вычисляется совместно используемый диапазон между объектом, включенным в изображение, и множеством объектов или одиночным объектом, спроецированными на изображение, и на основе вычисленного совместно используемого диапазона определяется, совпадают ли или нет множество объектов или одиночный объект, распознанные посредством датчика 1, с объектом, распознанным посредством камеры 3. Следовательно, можно определить, совпадают ли или нет соответствующие объекты, на основе совместно используемого диапазона на поверхности или в пространстве объекта, обнаруженного датчиком 1, и объекта, обнаруженного камерой 3. В результате информация может быть объединена только для объектов, которые могут быть одним и тем же объектом.
[0095] Несмотря на то, что выше описаны варианты осуществления настоящего изобретения, вышеупомянутые варианты осуществления просто показывают некоторые из примеров применения настоящего изобретения и не предназначены для ограничения технического объема настоящего изобретения конкретными конфигурациями вышеупомянутых вариантов осуществления. Вышеупомянутые варианты осуществления можно соответствующим образом объединять, если нет противоречия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ОБЪЕКТОВ И УСТРОЙСТВО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2020 |
|
RU2808058C1 |
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ ФОРМЫ РУКОПИСНЫХ ОБЪЕКТОВ | 2004 |
|
RU2372654C2 |
| СПОСОБ ТРЕКИНГА ОБЪЕКТОВ НА ЭТАПЕ РАСПОЗНАВАНИЯ ДЛЯ БЕСПИЛОТНЫХ АВТОМОБИЛЕЙ | 2022 |
|
RU2798739C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ РУКОПИСНЫХ ОБЪЕКТОВ В РУКОПИСНОМ ВВОДЕ ЧЕРНИЛАМИ | 2004 |
|
RU2373575C2 |
| СПОСОБ, УСТРОЙСТВО И ОБОРУДОВАНИЕ ДЛЯ РАСПОЗНАВАНИЯ ПРЕПЯТСТВИЙ ИЛИ ЗЕМЛИ И УПРАВЛЕНИЯ ПОЛЕТОМ, И НОСИТЕЛЬ ДАННЫХ | 2019 |
|
RU2768997C1 |
| Способ распознавания местности | 2023 |
|
RU2836607C1 |
| СПОСОБ И УСТРОЙСТВО РАСПОЗНАВАНИЯ КАТЕГОРИИ ОБЪЕКТА ИЗОБРАЖЕНИЯ | 2014 |
|
RU2648946C2 |
| БОРТОВОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2573110C1 |
| СИСТЕМА ДЛЯ РАСПОЗНАВАНИЯ И ОТСЛЕЖИВАНИЯ ПАЛЬЦЕВ | 2012 |
|
RU2605370C2 |
| СПОСОБ КОМПЬЮТЕРНОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2003 |
|
RU2250499C1 |


Изобретение относится к способу и устройству распознавания объектов. Технический результат заключается в повышении точности распознавания одного объекта из множества объектов. В способе выполняют распознавание объекта с использованием датчика, выполненного с возможностью получать положение объекта, существующего в окружающем пространстве, в качестве облаков точек, включающих в себя множество точек обнаружения на виде сверху, при этом способ содержит этапы, на которых группируют облака точек согласно близости; определяют при выполнении аппроксимации многоугольником в отношении сгруппированных облаков точек, расположена ли или нет, по меньшей мере, часть точек обнаружения, составляющих сгруппированные облака точек, в непросматриваемой зоне аппроксимационного многоугольника, полученного посредством аппроксимации многоугольником в отношении облаков точек относительно датчика; распознают сгруппированные облака точек в качестве облаков точек, соответствующих множеству объектов, когда определено, что точки обнаружения расположены в непросматриваемой зоне относительно датчика; и распознают сгруппированные облака точек в качестве облаков точек, соответствующих одиночному объекту аппроксимационного многоугольника, когда определено, что точки обнаружения не расположены в непросматриваемой зоне относительно датчика. 2 н. и 7 з.п. ф-лы, 12 ил. 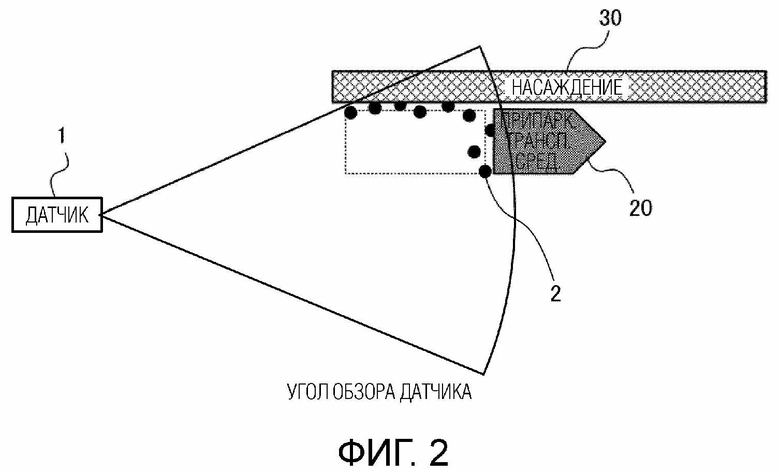
1. Способ распознавания объектов с использованием датчика, выполненного с возможностью получать положение объекта, существующего в окружающем пространстве, в качестве облаков точек, включающих в себя множество точек обнаружения на виде сверху, при этом способ содержит этапы, на которых:
группируют облака точек согласно близости;
определяют при выполнении аппроксимации многоугольником в отношении сгруппированных облаков точек, расположена ли или нет, по меньшей мере, часть точек обнаружения, составляющих сгруппированные облака точек, в непросматриваемой зоне аппроксимационного многоугольника, полученного посредством аппроксимации многоугольником в отношении облаков точек относительно датчика;
распознают сгруппированные облака точек в качестве облаков точек, соответствующих множеству объектов, когда определено, что точки обнаружения расположены в непросматриваемой зоне относительно датчика; и
распознают сгруппированные облака точек в качестве облаков точек, соответствующих одиночному объекту аппроксимационного многоугольника, когда определено, что точки обнаружения не расположены в непросматриваемой зоне относительно датчика.
2. Способ распознавания объектов по п.1, дополнительно содержащий этап, на котором распознают, когда объект распознан в качестве множества объектов, точки обнаружения, которые соответствуют конкретной стороне, которая является по меньшей мере одной стороной из сторон, составляющих аппроксимационный многоугольник, в качестве точек обнаружения, соответствующих одиночному объекту.
3. Способ распознавания объектов по п.2, дополнительно содержащий этап, на котором определяют конкретную сторону согласно количеству соответствующих точек обнаружения.
4. Способ распознавания объектов по любому одному из пп.1-3, дополнительно содержащий этап, на котором определяют, когда длина самой короткой стороны из сторон, составляющих аппроксимационный многоугольник, больше предварительно определенной длины, расположена ли или нет, по меньшей мере, часть точек обнаружения, составляющих облака точек, в непросматриваемой зоне аппроксимационного многоугольника относительно датчика.
5. Способ распознавания объектов по любому одному из пп.1-4, дополнительно содержащий этапы, на которых:
измеряют положение объекта, существующего в окружающем пространстве, во временном ряду;
идентифицируют атрибут объекта, измеренного во временном ряду; и
определяют, когда сгруппированные облака точек соответствуют объекту, атрибут которого не идентифицирован, расположена ли или нет, по меньшей мере, часть точек обнаружения, составляющих облака точек, в непросматриваемой зоне аппроксимационного многоугольника относительно датчика.
6. Способ распознавания объектов по любому одному из пп.1-5, дополнительно содержащий этапы, на которых:
распознают объект, существующий в окружающем пространстве, и идентифицируют атрибут объекта посредством использования блока распознавания, отличного от датчика;
определяют, совпадают ли или нет множество объектов или одиночный объект, распознанные посредством датчика, с объектом, распознанным посредством блока распознавания; и
добавляют атрибут к множеству объектов или одиночному объекту, распознанным посредством датчика, когда определено, что множество объектов или одиночный объект совпадают с объектом, распознанным посредством блока распознавания.
7. Способ распознавания объектов по п.6, дополнительно содержащий этапы, на которых:
обнаруживают расстояние от датчика до объекта, существующего в окружающем пространстве;
обнаруживают расстояние от блока распознавания до объекта, существующего в окружающем пространстве; и
определяют, являются ли или нет множество объектов или одиночный объект, распознанные посредством датчика, и объект, распознанный посредством блока распознавания, одним и тем же объектом, на основе расстояния от датчика до объекта и расстояния от блока распознавания до объекта.
8. Способ распознавания объектов по п.6 или 7, дополнительно содержащий этапы, на которых:
получают изображение, включающее в себя объект, существующий в окружающем пространстве, посредством блока распознавания;
проецируют множество объектов или одиночный объект, распознанные посредством датчика, на изображение;
вычисляют диапазон совпадения между занятой областью, которая представляет собой область, занятую объектом на изображении, и спроецированной областью, которая представляет собой область, занятую множеством объектов или одиночным объектом, спроецированными на изображение; и
определяют, являются ли или нет множество объектов или одиночный объект, распознанные посредством датчика, и объект, распознанный посредством блока распознавания, одним и тем же объектом, на основе вычисленного диапазона совпадения.
9. Устройство распознавания объектов, содержащее: датчик, выполненный с возможностью получать положение объекта, существующего в окружающем пространстве, в качестве облаков точек, включающих в себя множество точек обнаружения на виде сверху; и контроллер, выполненный с возможностью обрабатывать облака точек, полученных датчиком, при этом
контроллер дополнительно выполнен с возможностью:
группировать облака точек согласно близости облаков точек;
определять при выполнении аппроксимации многоугольником в отношении сгруппированных облаков точек, расположена ли или нет, по меньшей мере, часть точек обнаружения, составляющих сгруппированные облака точек, в непросматриваемой зоне аппроксимационного многоугольника, полученного посредством аппроксимации многоугольником в отношении облаков точек относительно датчика;
распознавать сгруппированные облака точек в качестве облаков точек, соответствующих множеству объектов, когда определено, что точки обнаружения расположены в непросматриваемой зоне относительно датчика, и
распознавать сгруппированные облака точек в качестве облаков точек, соответствующих одиночному объекту аппроксимационного многоугольника, когда определено, что точки обнаружения не расположены в непросматриваемой зоне относительно датчика.
| JP 2016148514 A, 18.08.2016 | |||
| EP 1531343 A1, 18.05.2005 | |||
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| JP 10283477 A, 23.10.1998 | |||
| JP 2018092603 A, 14.06.2018 | |||
| JP 2013041315 A, 28.02.2013 | |||
| JP 2012173230 A, 10.09.2012. | |||

